Embed Size (px)
Citation preview

Smart Enabling Technologies for
Automated Driving
Dr. Martin Duncan
• Introduction
• Cameras and the path towards autonomous driving
• The communication technology driven safety revolution
• Conclusions
2
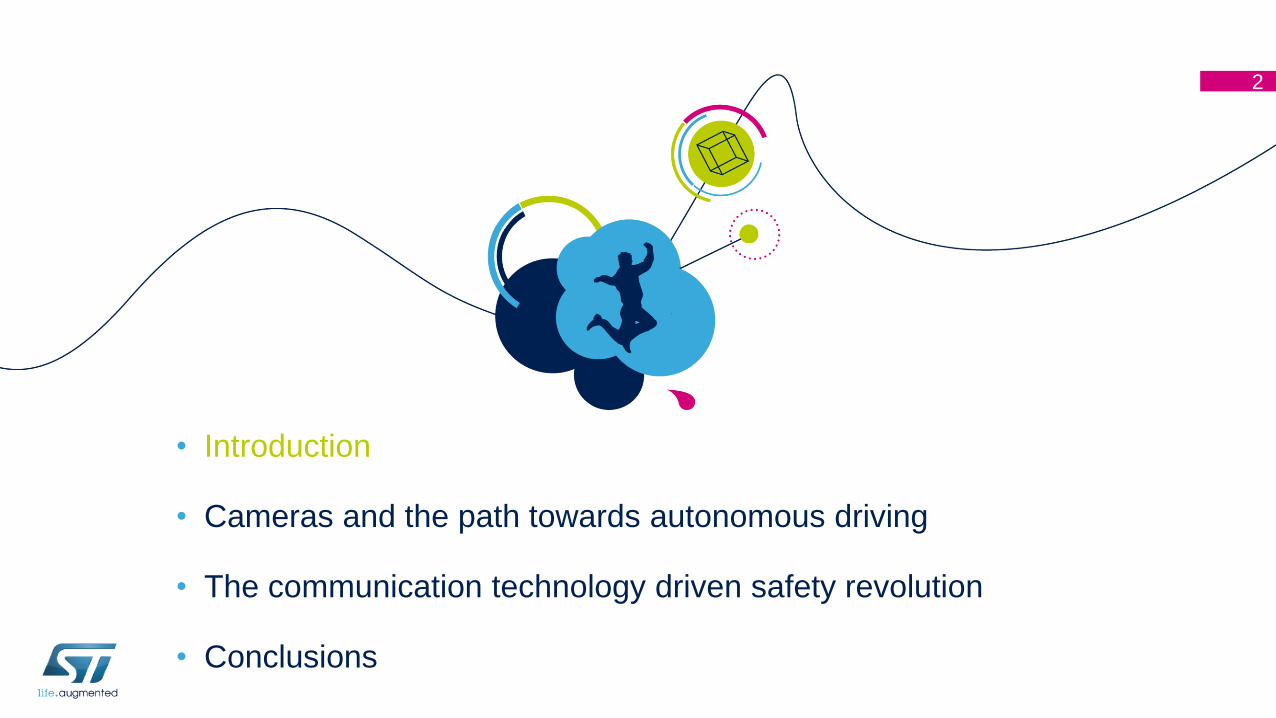
ADAS Driving Forces
Product
• The development of New Car Assessment Programmes help drive the
growth of ADAS
• Consumers consider the star ratings of the worldwide NCAP
organisations
• Constructors move from providing ADAS on all cars and not just premium
models
Standards
ADAS adoption is being driven by safety standards and the move to automated driving
Product
• New entrants to the traditional vehicle manufacturing market target
assisted / autonomous driving
• Consumers expectation rising that autonomous driving will make cars
safer
• Advantages for new mobility models and fleet management
Automated Driving
3
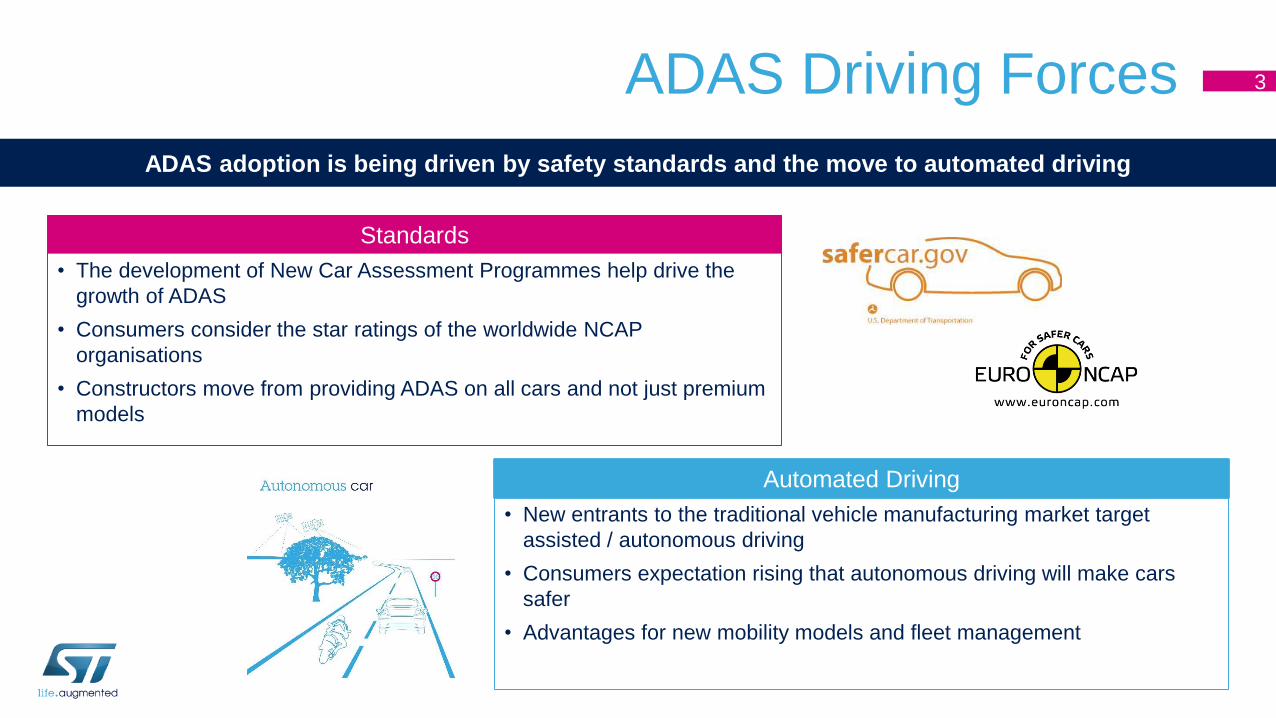
Crash Avoidance Technologies and
Effectiveness
% Incidence Automatic brake
(camera/radar)
Lane departure
(camera)
Blind spot
(camera/radar)
Headlight
(camera)
Rear end (29%)
Crossing (24%)
Off road (19%)
Lane (12%)
Animal 6%)
Wrong sense (2%)
Reversing (2%)
Ped/cyclist (2%)
Source: NHTSA
4
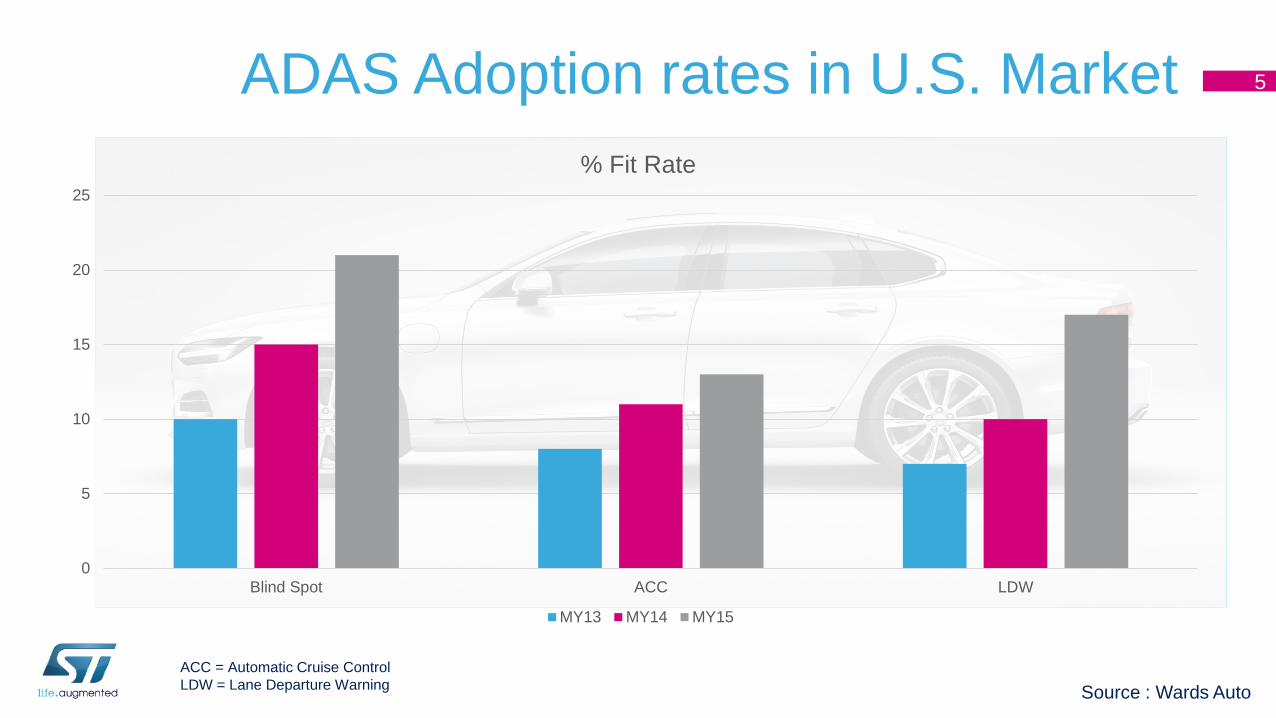
ADAS Adoption rates in U.S. Market
0
5
10
15
20
25
Blind Spot ACC LDW
% Fit Rate
MY13 MY14 MY15
Source : Wards Auto
5
ACC = Automatic Cruise Control
LDW = Lane Departure Warning
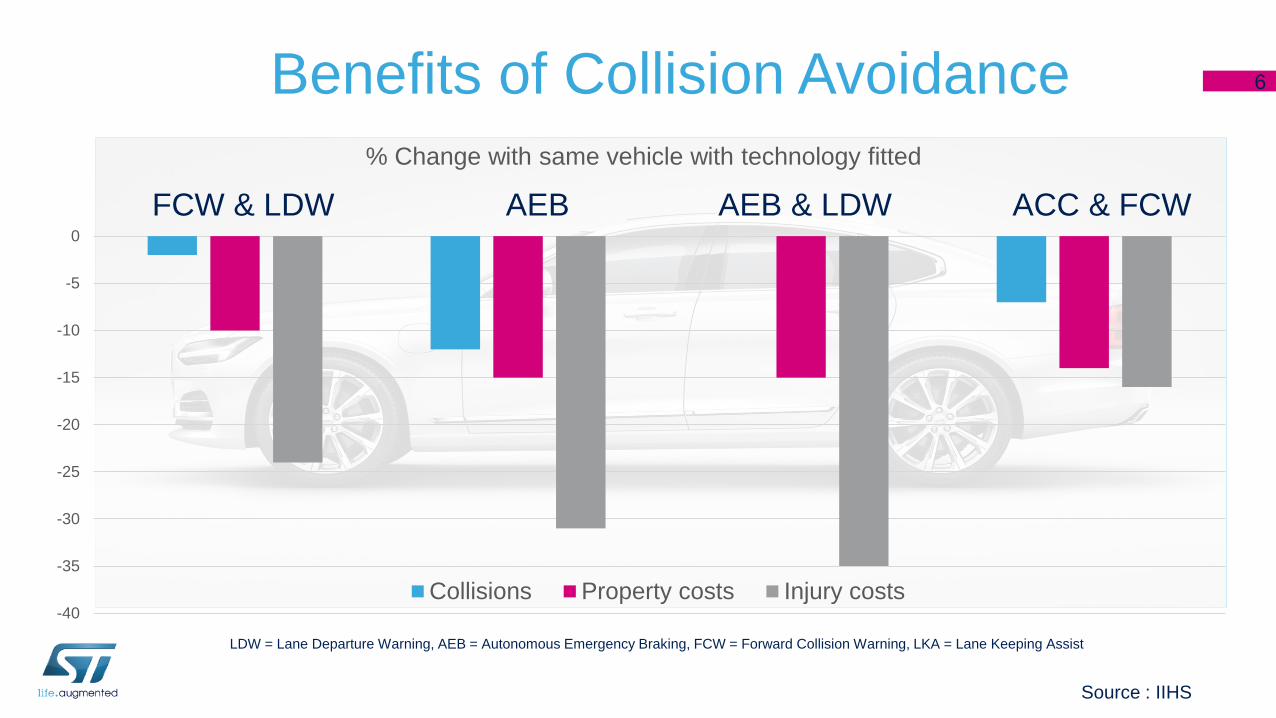
Benefits of Collision Avoidance 6
LDW = Lane Departure Warning, AEB = Autonomous Emergency Braking, FCW = Forward Collision Warning, LKA = Lane Keeping Assist
Source : IIHS
-40
-35
-30
-25
-20
-15
-10
-5
0
% Change with same vehicle with technology fitted
Collisions Property costs Injury costs
FCW & LDW AEB AEB & LDW ACC & FCW
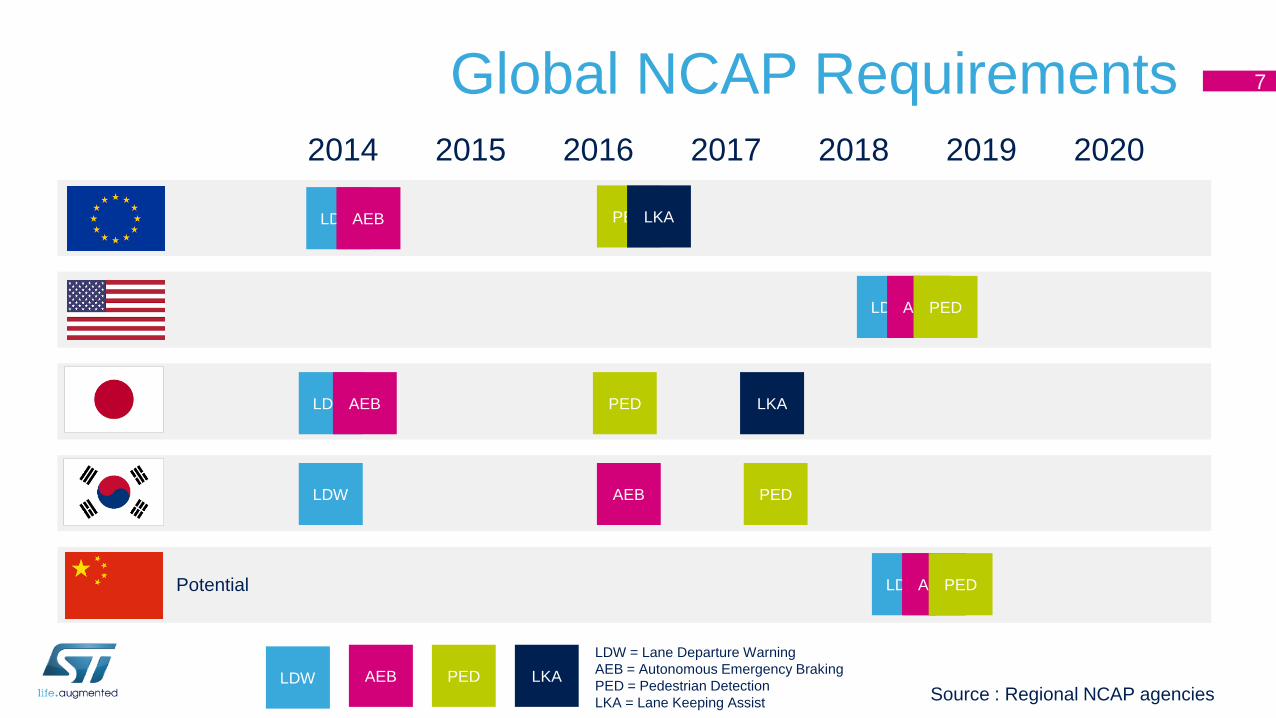
Global NCAP Requirements 7
2014 2015 2016 2017 2018 2019 2020
LDW AEB PED LKA
LDW
LDW
LDW AEB
AEB
AEB
PED
PED
LDWAEBPED
PED
LKA
LKA
LDWAEBPEDPotential
Source : Regional NCAP agencies
LDW = Lane Departure Warning
AEB = Autonomous Emergency Braking
PED = Pedestrian Detection
LKA = Lane Keeping Assist
Key Drivers for Automated Driving 8
Road Safety – Zero Accident Vision
Traffic Management
Emission Reduction
Demographic Change
Innovation
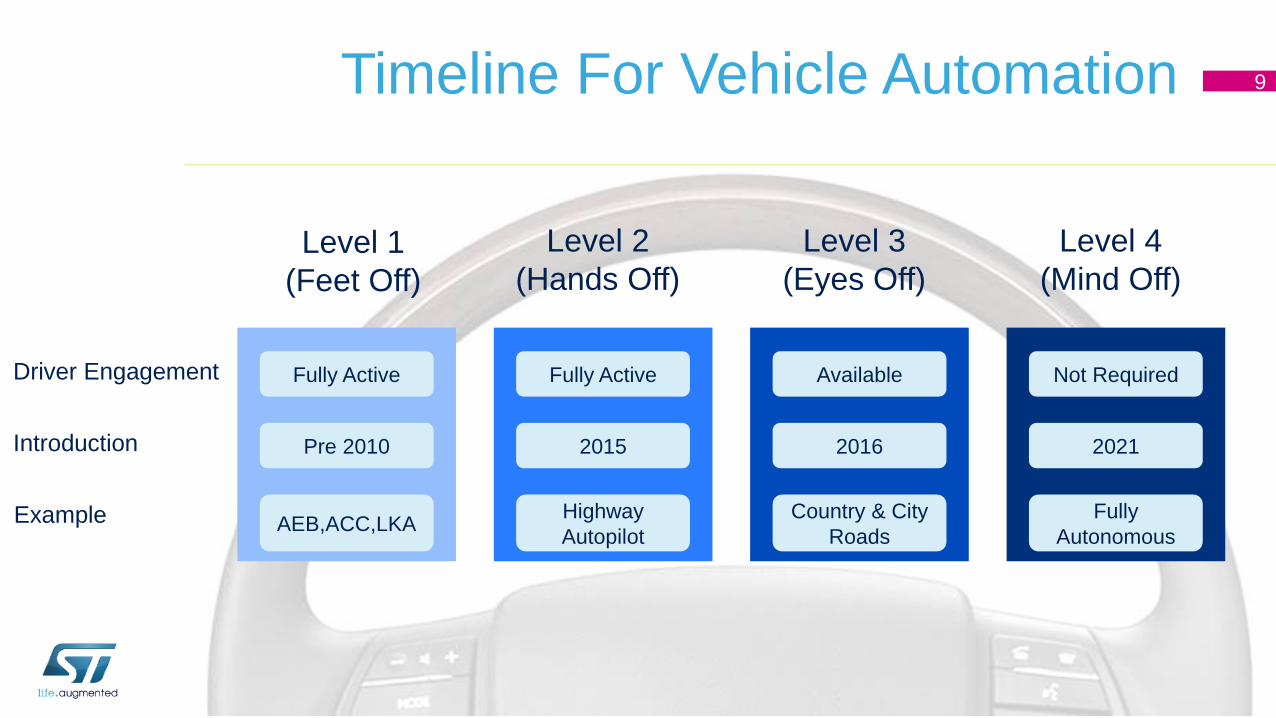
Timeline For Vehicle Automation
Driver Engagement
Introduction
Example
Level 1
(Feet Off)
Fully Active
Pre 2010
AEB,ACC,LKA
Level 2
(Hands Off)
Level 3
(Eyes Off)
Level 4
(Mind Off)
Fully Active
2015
Highway
Autopilot
Available
2016
Country & City
Roads
Not Required
2021
Fully
Autonomous
9
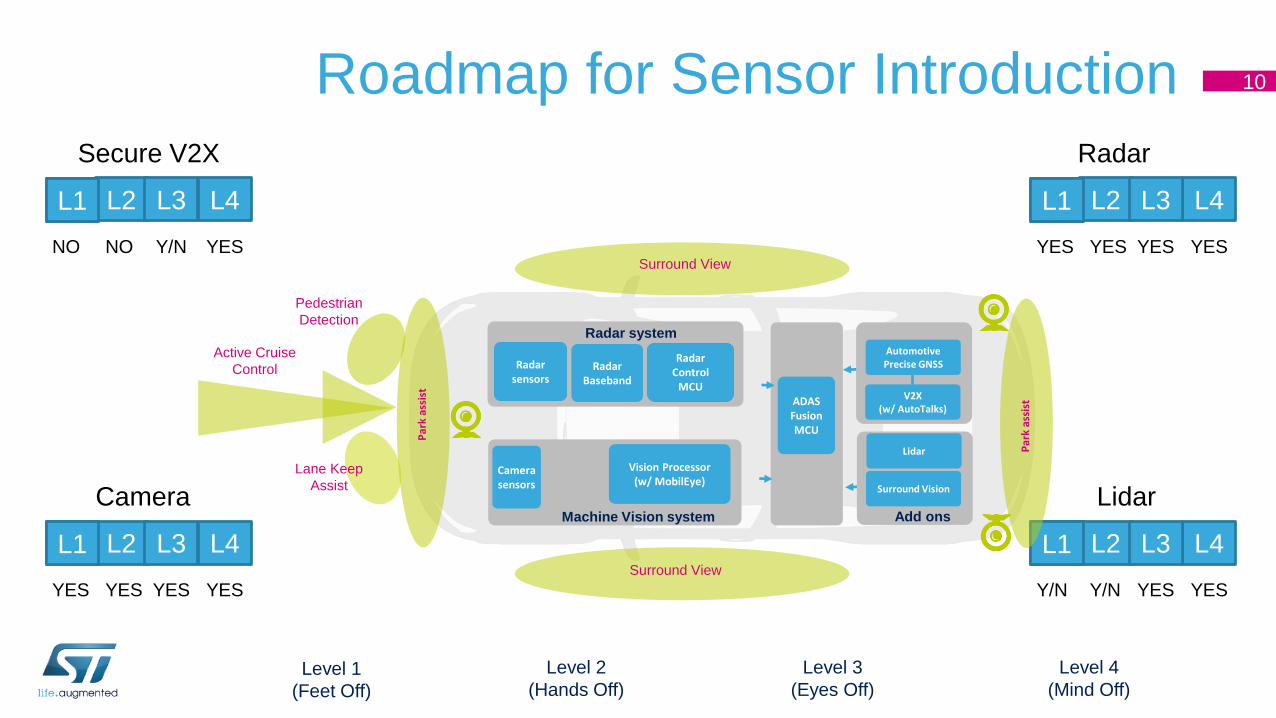
Roadmap for Sensor Introduction
Radar sensors
Machine Vision system
Camerasensors
Vision Processor(w/ MobilEye)
Radar system
Radar Control
MCUV2X
(w/ AutoTalks)
Pedestrian
Detection
Active Cruise
Control
ADASFusion MCU
AutomotivePrecise GNSSRadar
Baseband
Lane Keep
Assist
Surround View
Surround View
Surround Vision
Lidar
Add ons
L1
NO
L2
NO
L4L3
Y/N
L1
YES
Secure V2X
L1
Y/N
L2
Y/N
L4L3
YES
L1
YES
Lidar
L1
YES
L2
YES
L4L3
YES
L1
YES
Radar
L1
YES
L2
YES
L4L3
YES
L1
YES
Camera
Par
k as
sist
Par
k as
sist
10
Level 1
(Feet Off)
Level 2
(Hands Off)
Level 3
(Eyes Off)
Level 4
(Mind Off)
Trend is that Vision will drive future systems
• Richest source of raw data about the scene
- only sensor that can reflect the true
complexity of the scene.
• The lowest cost sensor - nothing can beat
it, not today and not in the future.
• Cameras are getting better - higher dynamic
range, higher resolution
• Combination of Radars/Lidar/Ultrasonic: for
redundancy, robustness
11
WiFi based communication
• V2X is a Wireless Technology enabling vehicles to exchange information
such as position and speed with other vehicles (V2V) or infrastructures to
deliver data to vehicles (V2I)
• OBU (Onboard Unit) when V2X system is in the vehicle
• RSU (Roadside Unit) ) when V2X system is on road infrastructures
• Communication system that alerts drivers to unseen dangers of potential
collisions to increase their safety
• Non-Line-of-Sight and extended-range sensing that on-board cameras and RADARs
cannot offer
• V2X has also been developed and standardized for other non-safety
systems, such as Energy Saving
12
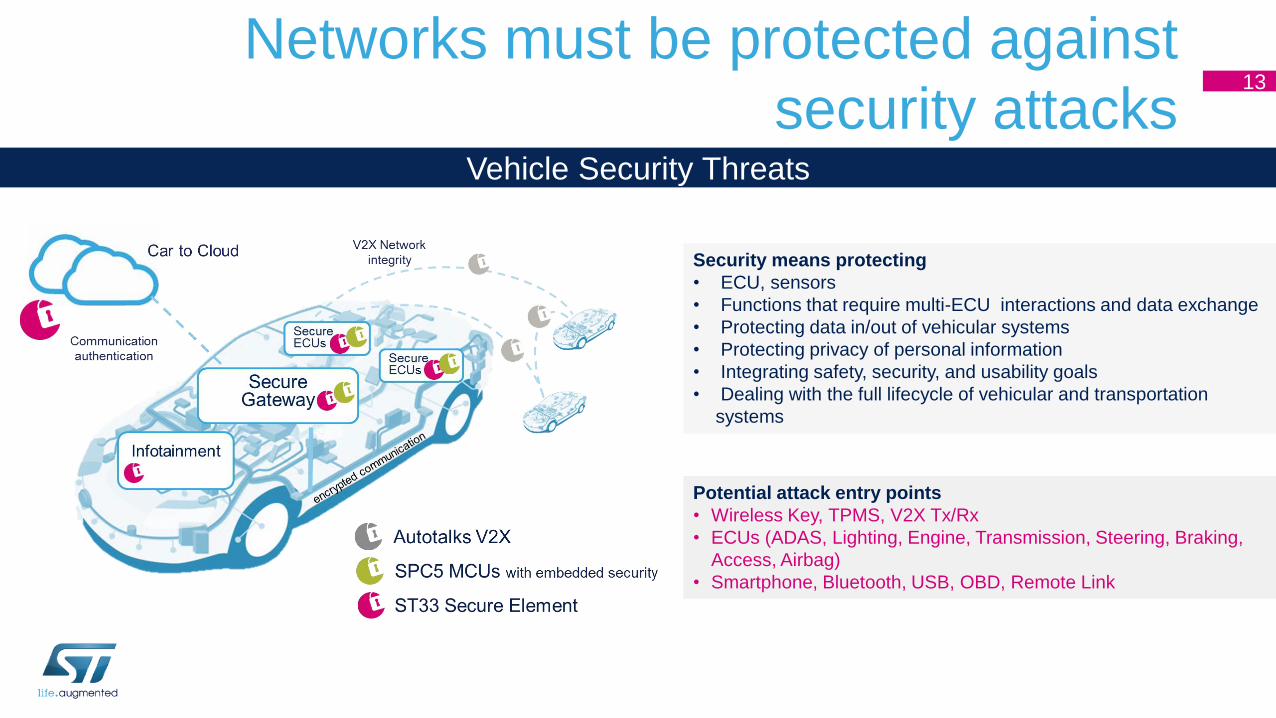
Networks must be protected against
security attacks13
Vehicle Security Threats
Security means protecting
• ECU, sensors
• Functions that require multi-ECU interactions and data exchange
• Protecting data in/out of vehicular systems
• Protecting privacy of personal information
• Integrating safety, security, and usability goals
• Dealing with the full lifecycle of vehicular and transportation
systems
Potential attack entry points
• Wireless Key, TPMS, V2X Tx/Rx
• ECUs (ADAS, Lighting, Engine, Transmission, Steering, Braking,
Access, Airbag)
• Smartphone, Bluetooth, USB, OBD, Remote Link
Conclusions 1/2
• ADAS is to be dominated by cameras
• The primary sensor for automated driving will also be the camera
• Multiple cameras will be used
• Radars and Lidars will be used for redundancy and for additional robustness
when cost allows
• Visual interpretation is difficult if done at high image quality and will require a
massive validation resources
• Automated Driving requires environmental modeling and path planning
14
Conclusions 2/2
• Connectivity is changing the rules radically
• Car Communication enables safety features
• Road experience management takes it to new levels
• The safety requirements bar is being raised and requires complex techniques
• Highly automated driving needs all of the above and is coming to a road near
you soon!
• Watch this space, it may be a bumpy ride but it will be fun
15