Embed Size (px)
Citation preview
U.D.C.
ポ ン プ の 自 動 制 御Automatic Controlfor Pumps
木 暮 健Kenzaburo Kogure
る21.る7-52
郎* 佐 藤 広 光**Hiromitsu Sato
内 容 梗 概
水道用,鉱山排水用,農業用,その他各種産業用に使用されるポンプの【′l勧化は,一人制御方式日動
運転,制限開閉器による自動運転などが盛んに行われている。今回水道用として需要量の変動に応じて
ポンプ速度を調整し配管による損失水頭を補償して,需要端における水圧を一定に保つように自動制御
を行ったポンプならびにその制御装置を新潟市水道局大島浄水場に製作納入した。ここにそのポンプお
よび制御装置の仕様および特性について報告する.。
ルタ丁は㊤㊤,pほ㊤㊨で示される。次にポンプをl.緒 R
大都市水道配水川のように,その使用水量が季節的に
も,また一日のうちでも時間的に非常に変動するボンフ
は,配管が長くなれば,その管路抵抗による水圧降下が
大きいため給水端における圧力が変動し,需要家がはな
はだ困惑する(。このために使用量に応じて常に給水端圧
力を一定にするように制御せねばならぬ。この方法とし
ては,
(1)吐=弁絞り調節
(2)駆動ポンプの速度調整
などがあり,これらは一世独または組合せて使mさj~tる。
(1)ポンプ吐仙師こ絞りをあたえ水昂:を変える力式
は,動力の肌失ほ放も大きいが介操作川電動機の督還
ほ数馬力程度の小容i_i-;:のためTFi順Jしやすく,最も簡易
な制御方法であるり
(2) ポンプ7速度を;馴御すれば
ポンプのlrり転数を変えた場合の相性変化ほⅢま論的にほ
qcっn,bcっn2,pCつn3,ニ∽n2の関係がある。
ただL q=単位時間当りの揚水量
h=全揚程
p=軸動力
丁=トルク
n=ポンプ河転数
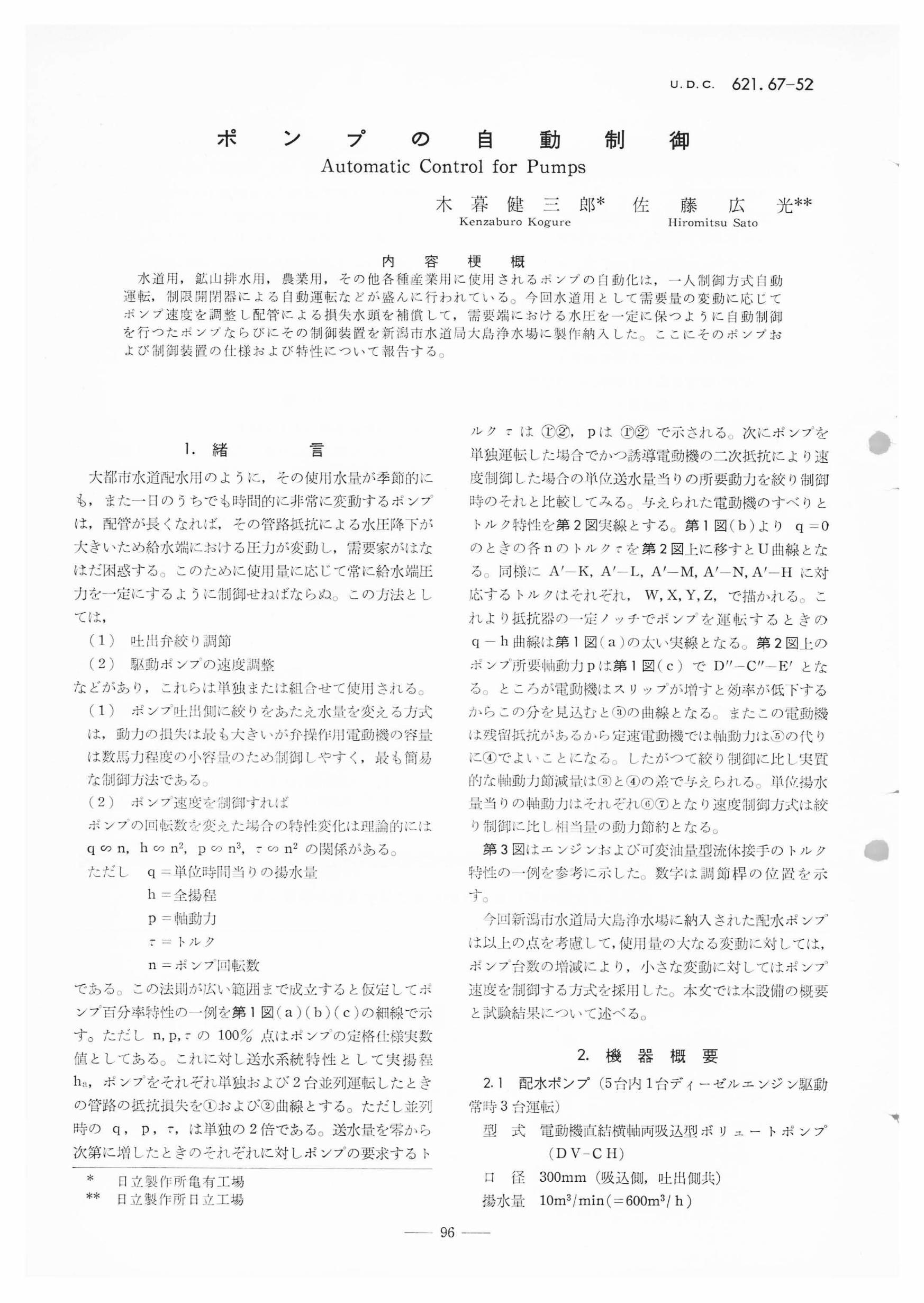
である。この法則が広い範囲まで成立すると仮定してポ
ンプ百分率特性の一例を第】図(a)(b)(c)の紺視でホ
す。ただしn,p,丁の100鬼∴点ほポンプの定格仕様実
値とL-てある。これに対L送水系統特性として実揚程
ba,ポンプをそれぞれ単独およぴ2台並列 転したと
の管路の抵抗損失を①および④曲線とする。ただし並列
時の q,p,丁,は単独の2倍である。送水量を から
次第に増したときのそれぞれに対しポンプの要求するト
*日立製作所亀有工場
**日立製作所日立工場
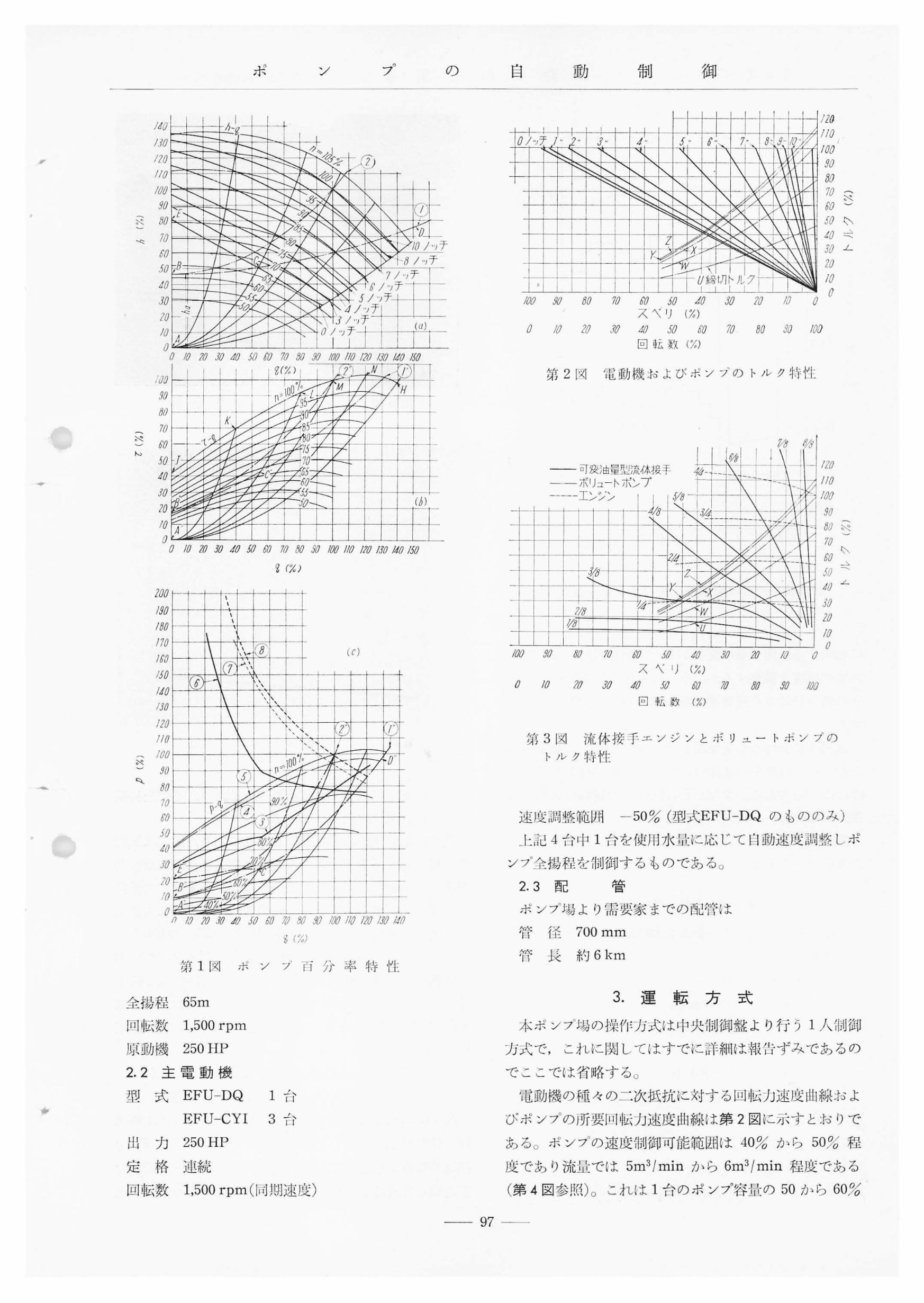
単独 転した場合でかつ誘 電動機の二次抵抗により速
度制御した場合の単位送水量当りの所要動力を絞り制御
時のそれと比較してみる。与えられた電動機のすべりと
トルク特性を第2図実線とする。弟1図(b)より q=0
のときの各nのいレク丁を第2図上に移すとU曲線とな
る。同様にAしK,AしL,AしM,A′LN,AしHに対
応するいレクはそれぞれ,W,Ⅹ,Y,Z,で描かれる。こ
れより抵抗絹の-▲定ノッチでポンプを 転するときの
q-h曲線ほ黄1図(a)の太い実線となる。第2図上の
ポンプ所要軸動力pほ第l図(c)でD′しC′′-E′とな
る。ところが 動機ほスリップが増すと効率が低下する
からこの分を見込むと⑨の曲線となる。またこの電動機
は残留抵溺があるから定速電動機では軸動ノ」は㊦の代り
に④でよいことになる.こノ したがって絞り制御に比し実質
的な軸動力節減轟二は と④の差で与えられる.。,一甲位揚水
量当りの軸動力ほそれぞれ④⑦となF)速度制御方式は絞
り制御に比し相当品の動力節約となる。
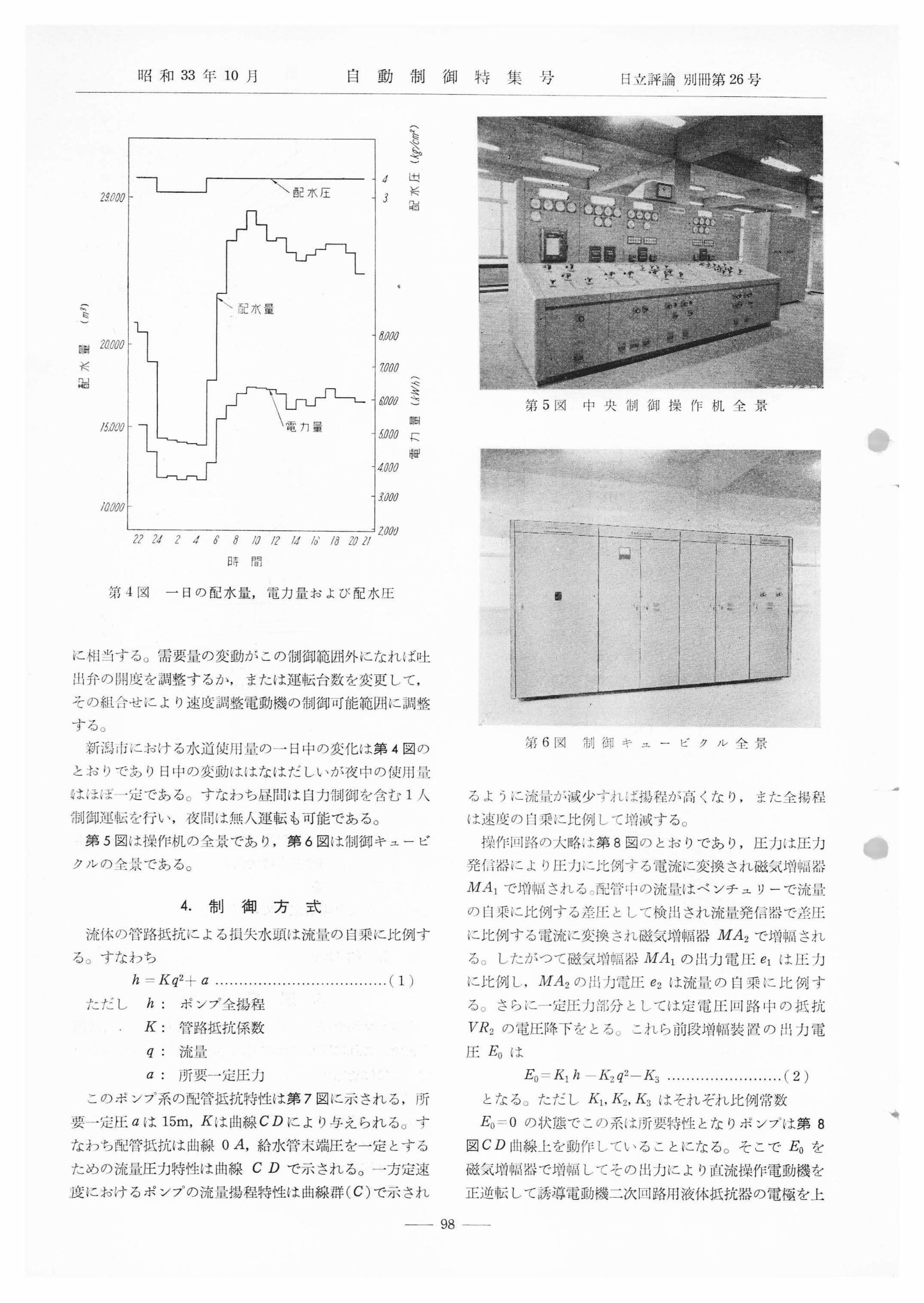
弟3図はエンジンおよび可変油量蔑流体接手のいレク
特性の一一例を参考にホした。数字ほ調節梓の位置を示
す。
到【~i!新潟市水道局大島浄水場に納入された配水ポンプ
は以上の点を考億して,使用量の大なる変動に対してほ,
ポンプ台数の増減により,小さな変動に対してほポンプ
壇を制御する方 を採川した。本文では木設備の概要
と試験結果について述べる。
2.機 器 概 要
2・1配水ポンプ(5台内1台ディーゼルエンジン駆動
常時3台 転)
型 式 電動機直結横軸両吸込型ポリュートポンプ
(DV-CH)
口 径 300mm(吸込伽,吐出側共)
揚水量10m3/min(=600m3/b)
ン プ の
l
カー旨、▲-・十
ク㌔
′右ノ 二㊥「等
~砕
_,軋」_/βノー・ノチ
し~~J
■丁\
lL既■こ房l
.教
1
十~~
.堵ミ
L勿l
名な.~ =~
方 \∂/・・′チ
.~~丁
、J
/
■ソ
、7ノ
リ≠「.物L尤舛こ\]牽
♂/1ソテ~■~+~
/斤___l
ンリ
こ㍍二. ソチ
l (β)
l∬♂ 止7 兇7 ガ㌧好JⅥのク 花7 甜J ノ挽7〟ク/惣7脚戯7/形
・巳g「芦): 「
〝.
1‡。塊∠⊥-切L∠ノ1ノ〝
l
.~」芸筆ニ烏麦.打
~、~†
l
~ ~~~十∬
万娼
r≠」訂1「∴+ 】
トガ-.--∬・-
形L
圏
し/+ i
♂ 〟7 ガj伊都㌧好 ぷク〃1汐 虎7 腐= ノ望ク〟汐ノ抑ノ脚
■ヽ
-
β♂
7♂
〃
Jか
1-
∬
〟
ノ/♂
♂
口】
口」】
r
r
l l J\ :しl凧
\田J二、
十
l
Lヽ
ト
用トヽ
】、 】 l
ト、i 幽 /-J
L
) ⊇ \【l
l\
ーー1
l
∫ 。ナ1pO;β`-
、訝
四 薪L.二享/・∂汐
汐ズー■
∵
l
l 「/
J汐Z
弧〔是
「
えl
十
tl
【 l
教場 】
宰(フ£ノ
第1岡 ポ ソ プ 百 分 率特 性
全揚程 65皿
回転数1,500rpm
原動機 250HP
2.2 主電動機
型 式 EFU-DQ
EFU-CYI
_エヽ亡J
-■ヽ
「1
出 力 250HP
定 格 連続
回転数1,500rpm(同期速度)
l T
♂ノッチノ・∴Z什 j一ノ ∠:・■ ∫・一 J′:\ 7.{\ J ♂′
l
l ll ∴、
~凄
匹
【 7
タン′
/]
l
匹
【l 十
⊥」_Ⅶ
l
〟l
ノ祝ク .財β♂
♂ 〝 月7
符
∬
べ
甜ス必
、、、
∬
回転数(%)
、
一〃〉
ハ〃■
■〃)
ハけ
→∠
/
ハU
βJ
/
/
/
へ望
へ⇒エ
脚mり〃〃〟ガ〃ル甜川ルβ
β♂ ガ 肌7
第2国 電動機およびポンプのトルク特性
紺
%lllr
孝一夕
可変油量型流祓積羊 威トl
,二丁--ト」こ」
l
/j
闇
ーーーポリュートポンプ l
--一一一工/ノノ l
吻旧 i\ l-イ
【婚
トーーー1-7歪′:l ト l
l十
〃【
Z
キぺ
l1
l
l
紺
モー-i二1
l】
【∵+
≧狸__ 讃し′ レク汐 l l
〟 l ー∵】 l
u
戯フ ガ 〃 か 甜 J汐 戎フ ガ ガ
ス ヾリ(ズ)-
、、
回 転数(%)
責)
ト
ミ
ノ
御郎鋸柑〃∬ガガ〃〃♂
第3圃 流体接千エンジンとポリュートポンプの
トルク特性
速度調整 囲【50%(型式EFU-DQのもののみ)
上記4台中1台を使用水量に応じて自動
ンプ全揚程を制御するものである。
2.3 配 管
ポンプ場より需要家までの配管は
管 径 700mm
管 長 約6km
度調整しポ
3.運 転 方 式
本ポンプ場の操作方式は中央制御盤より行う1人制御
方式で,これに関してはすでに
でここでほ省略する。
紳は報告ずみであるの
動機の種々の二次抵抗に対する回転力速度曲線およ
ぴポンプの所要回転力 2図に示すとおりで
ある。ポンプの連座制御可能範囲は40%から50%程
度であり流量では5m3/minから6m3/min程度である
(策4図参照)。これほ1台のポンプ容量の50から60タ∠
昭和33年10月 集 号
∴・● 、
、、、、
椙 問
ヽ
覧
∴一
二iく
.」
~g♂戊ク
aク〟♂
〟♂α7
ノ制御
Z♂此/
第4図 一日の配水量,電力量および配水圧
へ~怠)出)≡旧
書きこ
附岬〔
に相当する。需要量の変動がこの制御範囲外になれば吐
出弁の閑度を調整するか,またほ運転台数を変更して,
その組合せにより
する。
度調整電動機の制御可能範囲に調整
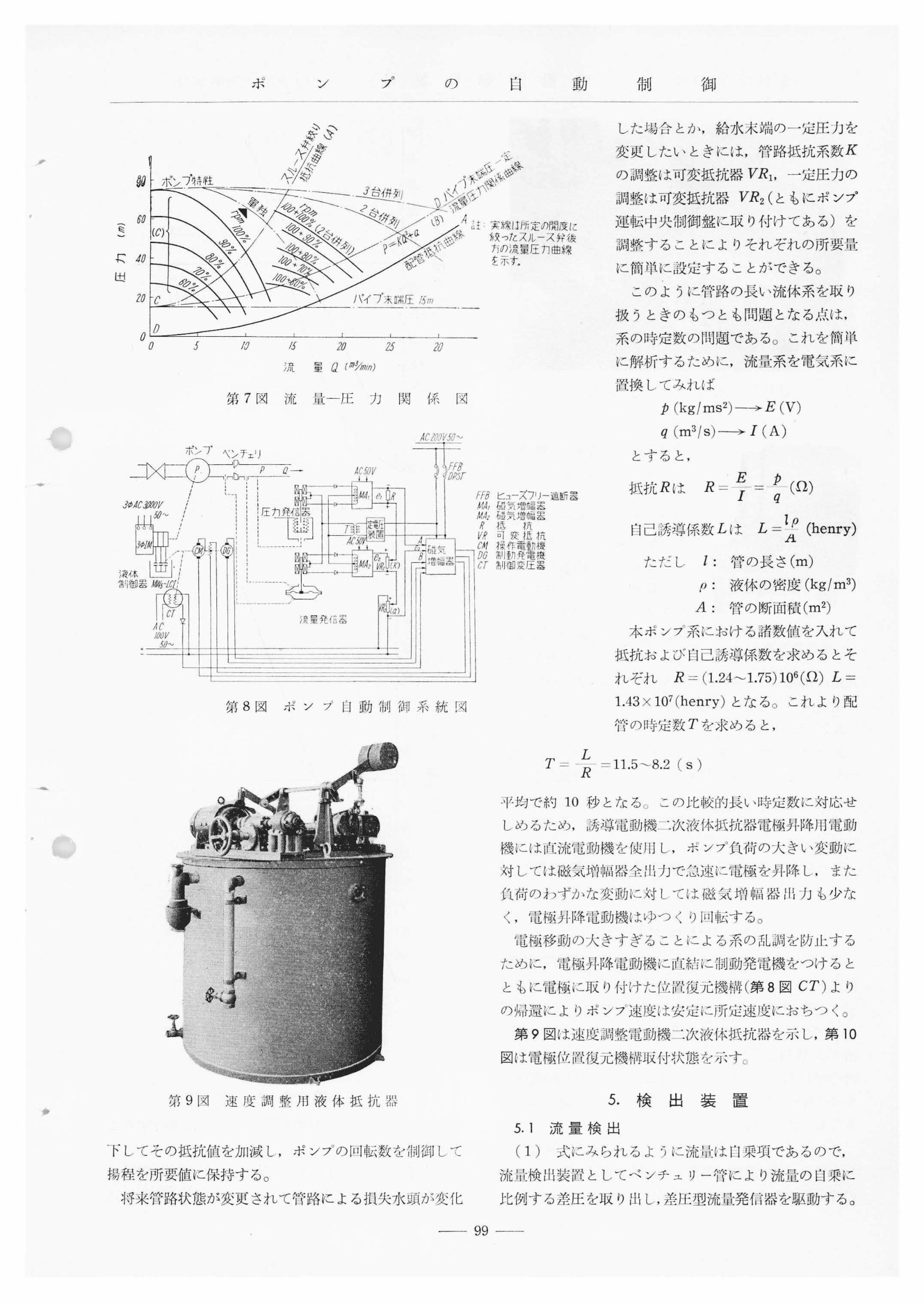
新潟市における水道使用量の一日中の変化は弟4図の
とおりであり日中の変動ほほなはだしいが夜中の使用品
ほほぼ一定である。すなわち昼間は自力制御を含む1人
制御運転を行い,夜間ほ無人運転も可能である。
舞5図は操作机の全景であり,葬る図は制御キユーピ
クルの全景である。
4.制 御 方 式
流体の管路抵抗による損失水頭は流量の自乗に比例す
る。すなわち
ゐ=足留2+α
ただし ゐ:ポンプ全揚程
∬:管路抵抗係数
流量
所要一定圧力
..(1)
このポンプ系の配管抵抗特性は第7図に示される,所
要一一定圧αほ15m,斤は曲線Cβにより与えられる。す
なわち配管抵抗ほ曲線OA,給水管末端圧を一定とする
ための流量圧力特性ほ曲線Cヱ)で示される。一方定速
度におけるポンプの流量揚程特性は曲線群(C)で示され
日立評論別冊第26号
第5国 中 央 制 御 操 作 机 全 景
第6図 制御キ ユー ピク ル全景
るように流量が減少すれば揚蘭が高くなり,また全揚程
ほ速度のu乗に比例して増減する。
操作回路の大略ほ第8図のとおりであり,圧力ほ圧力
発い器により圧力に比例する電流に変換され磁気増幅器
〟Alで増幅される。配管中の流量ほベンチエリーで流量
の自乗に比例する差圧として検出され流量発信器で差圧
に比例する電流に変換され磁気増幅器〃A2で増幅され
る。したがって磁気増幅器此Mlの出力電圧elほ圧力
に比例し,凡才A2の‖力電圧e2ほ流量の自乗に比例す
る。さらに→定圧力部分としては定電圧回路中の抵抗
Ⅴ点2の電圧降下をとる。これら前段増幅装置の出力電
圧∴吼は
且0=屁1′エー∬2留2一垢
となる。ただし私,穐,範はそれぞれ比例常数
昂=0の状態でこの系は所要特性となりポンプは第8
図C上)曲線上を動作していることになる。そこで昂を
磁気増幅器で増幅してその出力により直流操作電動機を
正道転して誘導電動機二次回路用液体抵抗器の電極を上
ン′ フ
_、、
室 β上物れ
∬
第7図 流 量一圧 力 関 係 図
〟Ⅵ別Ⅷト
ボンつ'∧くンチエリ
p ♂--- 〟ⅥW
、紗〟戯彩〆
遜
J珊
梢
・∬
〟レ
罠
う
発イ;岩〃
ノr
脚〆
克7~ 】
〃L里
土)温
第8図 ポン プ 自動制御系統図
第9図 速度調整用液体抵抗器
下してその抵抗値を加減し,ポンプの回転数を制御して
揚程を所要値に保持する。
将 管路状態が変更されて管路による損失水頭が 化
冊拙耽々〃珊〃打
動 制
ヒコ【ズフ廿」動折岩石産気増幅芸石・義気増 芸幅
杭礫耗芸
」几旦訂電圧
才鋸偶㈹根
絶可掘削馴
した場合とか,給水末端の一定圧力を
変更したいときには,管路抵抗系数g
の調整ほ可変抵抗器l′月1,一定圧力の
整は可変抵抗器Ⅴ属2(ともにポンプ
運転中央制御盤に取り付けてある)を
調整することによりそれぞれの所要量
に簡単に設定することができる。
このように管路の長い流体系を取り
扱うときのもつとも問題となる点ほ,
系の時定数の問題である。これを簡単
に解析するためiこ,流量系を電気系に
置換してみれば
♪(kg/ms2)→E(Ⅴ)
曾(m3/s)→∫(A)
抵抗批点=一号=言-(Q)
自己誘導係数エほエ=慧(benry)ただしJ:管の長さ(m)
p:液体の密度(kg/m3)
A:管の断面積(m2)
本ポンプ系における 数値を入れて
抵抗および自己誘導係数を めるとそ
れぞれ 属=(1.24~1.75)106(n)上=
1.43×107(henry)となる。これより配
管の時定数Tを求めると,
r=意=11・5~8・2(s)平均で約10秒となる。この比較的長い時定数に対応せ
しめるため,誘導電動機二 器抗抵体液次 昇降用電動
機には壇:流電動機を使用し,ポンプ負荷の大きい変動に
対しては磁妄ミ増幅貨詩全出力で急 に電極を昇降し,また
負荷のわずかな変動に対しては磁気増幅器廿i力も少な
く, 極昇降 動機ほゆつくり回転する。
電極移動の大きすぎることによる系の乱調を防止する
ために,電極昇降電動機i・こ直結に制動発電機をつけると
ともに電極に取り付けた位置復元機構(弟8図Cr)より
の帰還によりポンプ速度は安定に所定速度におちつく。
第9図は速度 整; 動機二次液体抵抗器を示し,弟10
図は電極位置復元機構取付状態を示す。
5.検 出 装 置
5.】流量検出
(1)式にみられるように流量は甘乗項であるので,
流量検出装置としてベンチエリー管により流量の自乗に
比例する差圧を取り出し,差圧型流量発信器を駆動する。
昭和33年10月 自 動 制 御
第10図 電
第11図 差圧型流量
検出器外観
極位置 復 原機 構
流量発信器の外観ほ第11図
に示されその構造ほベンチュ
リーよりの 圧によりダイヤ
フラムおよびベローズを動か
し,その偏位によって二重ソ
レノイドの中心に置かれた鉄
心を移動し,二つのコイルの
リアクタンスを変化させれ
ば,両コイルに流れる 流の
差ほベンチュリーの発生する
差圧に比例する。すなわち流量発信器のHi力(両コイル
の差電流)は流量の自乗に比例する。
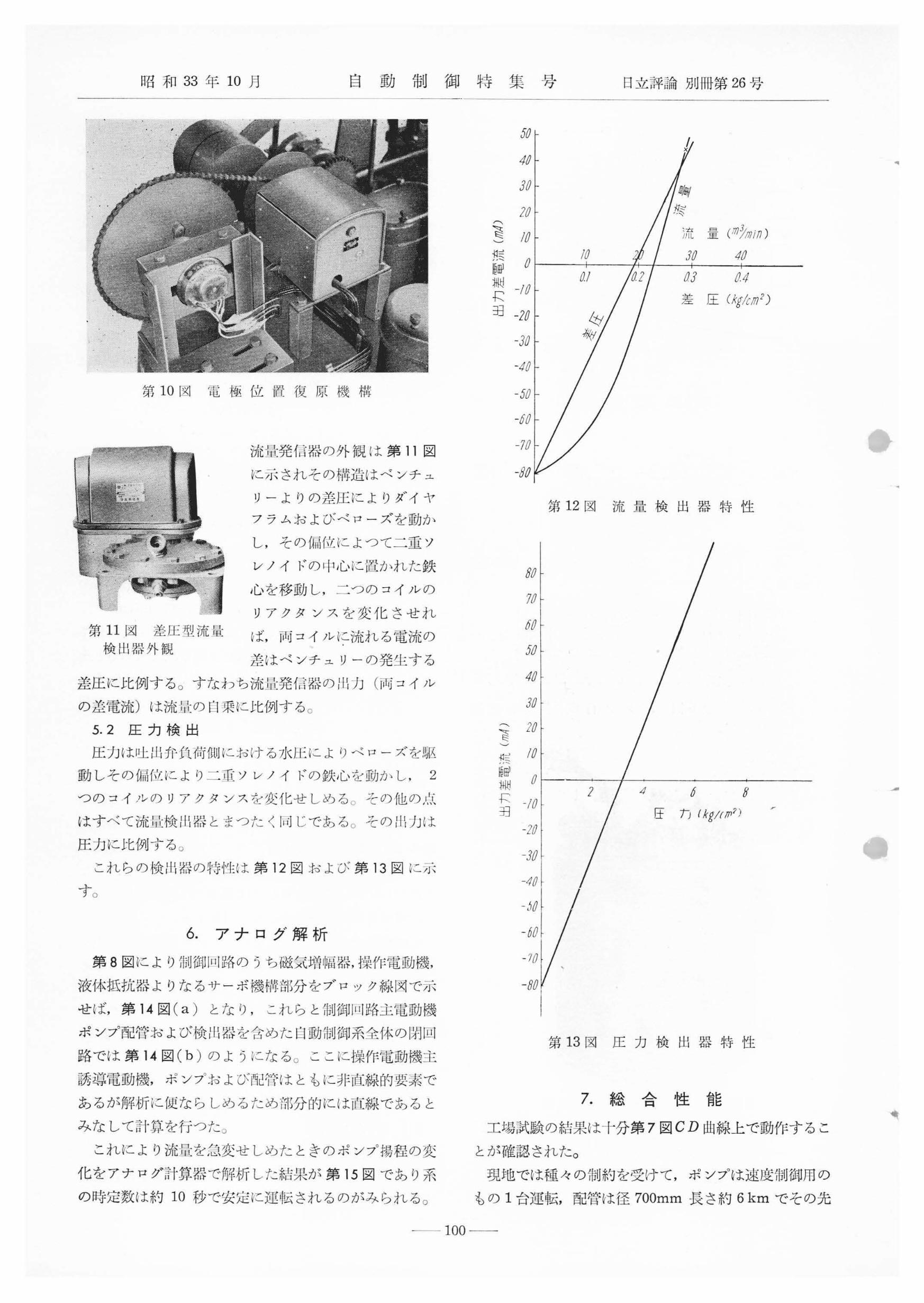
5.2 圧力検出
圧力ほ吐出弁負荷側における水正によりベローズを駆
動しその偏位により二重ソレノイドの鉄心を動かし,2
つのコイルのリアクタンスを変化せしめる。その他の瓜
はすべて流量桧山器とまったく同じである。その甘力ほ
圧力に比例する。
これらの検出器の特性ほ策12図および第13図に示
す。
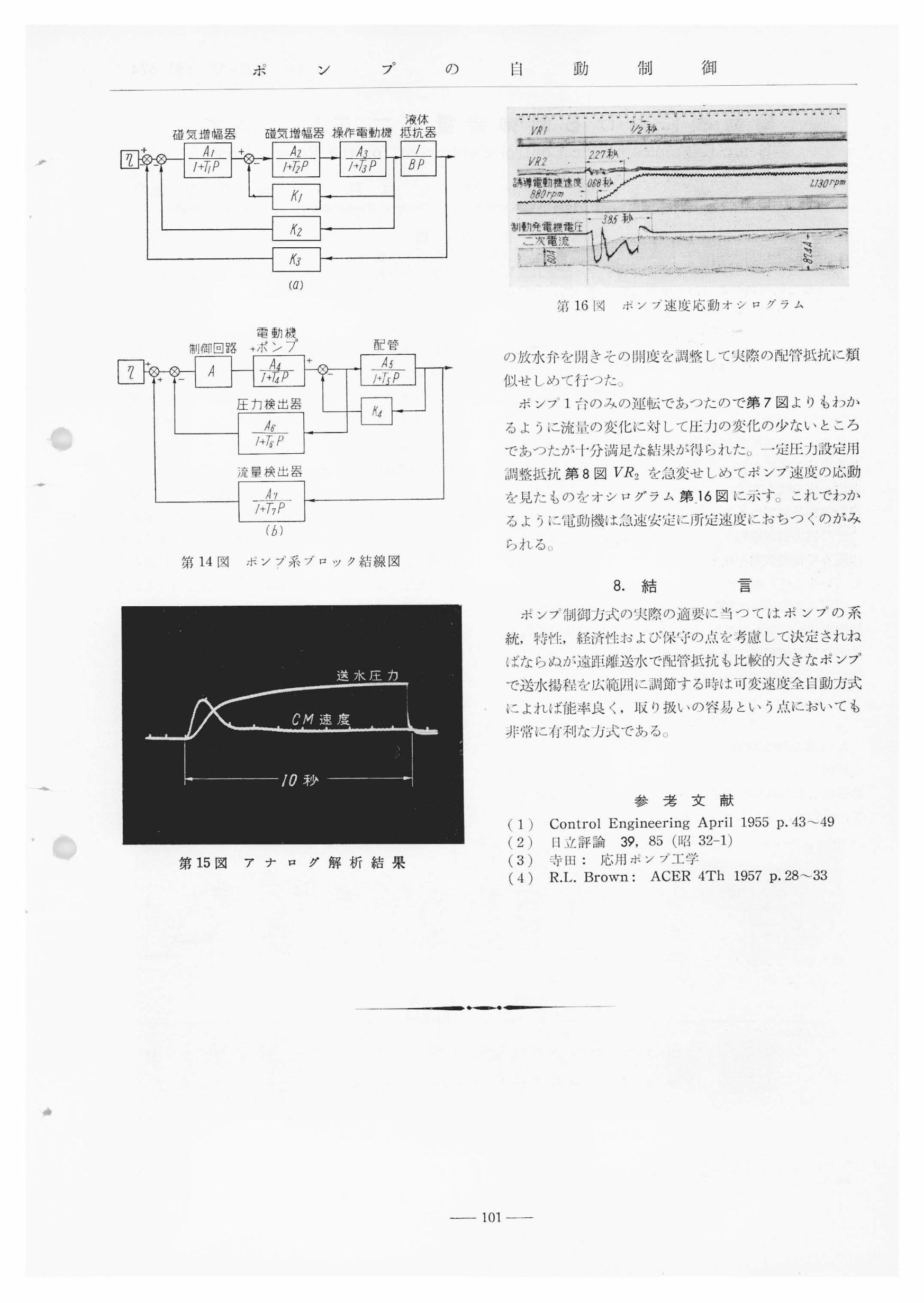
る.アナログ解析
第8図により制御回路のうち磁気増幅器,操作電動機,
液体抵抗器よりなるサーボ機構部分をブロック線図で示
せば,第14図(a)となり,これらと制御り1路主電動機
ポンプ配管および検氾器を含めた白動制御系全体の閉回
路では弟14図(b)のようになる。ここに
導電動機,ポンプおよび配管はともに非直線的要
機主
であるが解析に使ならしめるため部分的にほ直線であると
みなして計算を行った.。
これにより流量を急変せしめたときのポンプ揚程の変
化をアナログ計算器で解析した結果が弟15図であり系
の時定数ほ約10秒で安定に運転されるのがみられる。
特 集 号
へ盲、)棋脚湖仁∃
へ琶)棋紺測仁召
目立評論別冊第26号
第12図 流量検出器特性
♂
〃
第13図 圧力 娩 出 器特性
7.総 性 能
工場試験の結果ほ十分弟7図Cヱ)曲線上で動作するこ
とが確認された。
現地では種々の制約を受けて,ポンプは速度制御用の
もの1台運転,配管ほ径700mm長さ約6kmでその先
の 自
液体
通気増幅岩 石並気増幅器操作電動梯担抗岩
(の
第14図 ポソプ系ブロック結線図
第15図 ア ナ ロ グ解析結果
第16図 ポンプ速度応動オシログラム
の放水弁を聞きその関度を調整して尖際の配管抵抗に類
似せしめて行った。
ポンプ1台のみの運転であったので策7図よりもわか
るように流量の変化に対して圧力の変化の少ないところ
であったが十分満足な結果が得られた。一定圧力設定用
調整抵抗弟8図Ⅴ月2を急変せしめてポンプ速度の応動
を見たものをオシログラム弟.1る図に示す。これでわか
るように電動機は急速安定に所定速度におちつくのがみ
られる(.
8.結 言
ポンプ制御方式の実際の適要に当ってはポンプの系
統,特性,経済性および保守の点を考慮して決定されね
ばならぬが遠距離送水で配管抵抗も比較的大きなポンプ
で送水揚程を広範囲に調節する時は可変速度全自動方式
によれば能 良く,取り扱いの容易という点においても
非常に有利なカ式である。
、
-
・・-
1■・
1
2
3.4
.1
t、
し
・1
参 男 女 献
ControIEngineering Apri11955p・43~49
日立評論 39,85(昭32-1)
寺田:応用ポンプ工学
R.L.Brown:ACER4Th1957p.28~33
101---






![[XLS] · Web viewアクリロニトリルブタジエンラバー(NBR) Acrylonitrile butadiene rubber ポ リ ク ロ ロ プ レ ン Polychloroprene ポ リ ブ タ ジ エ ン](https://img.pdfslide.net/doc/110x75/5c43e68b93f3c34c4b270c82/xls-web-view-nbr-acrylonitrile.jpg)






![主 要 施 設 - Yokohama · 幹 線 第 三 ポ ン プ 施 設 着 水 井 最 終 沈 殿 池 ③ 太尾ポンプ場 No.1,2,3,4 [南側水処理施設] 太 尾 幹 線 調整タンク](https://img.pdfslide.net/doc/110x75/5f9f4141aad9d276ad31b438/-e-e-yokohama-c-c-f-f-f-e-c-oe-c.jpg)















