Embed Size (px)
Citation preview

1
BAB 1BAB 1BAB 1BAB 1
ALJABAR MATRIX
Dalam pokok bahasan ini akan disajikan dasar-dasar operasi
aljabar matrix yang berhubungan dengan analisis struktur dengan
menggunakan metode matrix kekakuan (stiffness method).
1.1. Pengertian Matrix
Matrix merupakan suatu kumpulan bilangan sejumlah m x n yang
disusun menjadi m baris dan n kolom. Persamaan (1.1) menunjukkan
contoh sebuah matrix dengan m baris dan n kolom.
[ ]
=
mnamama
naaa
naaa
a
...21
:::
2...2221
1...1211
(1.1)
Jika nm ≠ maka matrix yang ditunjukkan pada Persamaan (1.1)
disebut sebagai matrix persegi (rectangular). Jika m = 1 dan n > 1, maka
elemen pada Persamaan (1.1) tersusun dalam satu baris angka yang
disebut matrix baris. Jika m > 1 dan n = 1 maka akan tersusun bilangan
dalam satu kolom yang disebut sebagai matrix kolom. Jika nm = , maka
susunan bilangan yang terbentuk disebut sebagai matrix bujur sangkar
(square). Penulisan matrix baris, persegi dan bujur sangkar dinotasikan
menggunakan tanda kurung akolade [ ], sedangkan matrix kolom
dinotasikan dalam tanda kurung kurawal { }. Untuk memudahkan
penulisan matrix (baris, kolom, persegi maupun bujur sangkar) sering
dinotasikan dalam bentuk sebuah variabel dengan garis di bawahnya atau
sebuah variabel yang dikelilingi tanda kurung akolade ataupun kurung
kurawal. Penggunaan matrix selanjutnya disesuaikan dengan kebutuhan
para pemakainya misalnya; matrix gaya (forces) dan perpindahan

2
(displacements) dalam analisis struktur disusun dalam bentuk matrix
kolom, sedangkan matrix kekakuan (stiffness matrix) disusun dalam
bentuk matrix bujur sangkar.
Identifikasi elemen dalam sebuah matrix −a , direpresentasikan
dengan notasi ija , di mana subscript i dan j menunjukkan jumlah baris dan
kolom pada matrix −a . Berikut disajikan beberapa alternatif notasi matrix
−a = [a] = [ ]ija (1.2)
Contoh numeris dari berbagai jenis matrix disajikan pada
Persamaan (1.3) sampai (1.6). Contoh matrix −a yang tergolong matrix
persegi
−a =
45
43
12
(1.3)
di mana matrix −a tersusun dalam 3 baris dan 2 kolom. Jika matrix
−a
dalam Persamaan (1.1) hanya terdiri dari satu baris (m = 1), maka akan
dihasilkan matrix baris seperti berikut :
−a = [2 3 4 -1] (1.4)
Jika n = 1 maka Persamaan (1.1) akan menghasilkan matrix kolom,
misalnya :
−a =
3
2 (1.5)
Jika m = n maka Persamaan (1.1) akan menghasilkan matrix bujur sangkar
sebagai berikut :
−a =
−
−
23
12 (1.6)

3
Matrix dan notasinya sering digunakan untuk mengekspresikan
Persamaan Aljabar dalam bentuk ringkas yang sering ditemui dalam
analisis struktur dengan metode matrix kekakuan karena dalam
penggunaannya akan sangat membantu dalam menyelesaikan suatu
permasalahan numeris.
1.2. Operasi Matrix
Sub pokok bahasan ini menyajikan berbagai operasi matrix yang
sering digunakan dalam analisis struktur.
Perkalian Matrix dan Bilangan Skalar
Jika kita mempunyai sebuah bilangan skalar k dan suatu matrx −c , maka
matrix −−
= cka . dapat dihasilkan dari Persamaan
ijij
cka−−
= . (1.7)
di mana setiap elemen dalam matrix −c dikalikan dengan bilangan skalar
k, sebagaimana dalam contoh berikut :
=
− 13
21c k = 4
menghasilkan matrix −−
= cka .
=
=
− 412
84
13
21.4a
Perlu dicatat bahwa matrix −c yang berordo m x n akan menghasilkan
matrix −a yang berordo m x n.
Penjumlahan Matrix
Matrix yang memiliki ukuran ordo yang sama dapat saling dijumlahkan
untuk masing-masing elemen yang memiliki “alamat” sama, aturan ini
juga berlaku untuk operasi pengurangan matrix. Matrix-matrix dengan

4
ordo yang sama dapat dilakukan operasi penjumlahan dan pengurangan,
di mana untuk operasi penjumlahan akan mengikuti ketentuan hukum
komutatif dan asosiatif.
−−−−−
+=+= abbac (komutatif) (1.8)
−−−−−−−
+
+=++= cbacbad (asosiatif)
atau dalam bentuk notasi ber-index dapat dinyatakan :
[ ] [ ] [ ] [ ] [ ]ijijijijij abbac +=+= (komutatif) (1.9)
[ ] [ ] [ ] [ ] [ ] [ ]( ) [ ]ijijijijijijij cbacbad ++=++= (asosiatif)
sebagai contoh numerik dapat dilihat operasi matrix berikut :
−
−=
− 23
21a
=
− 13
21b
maka hasil penjumlahan −−−
=+ cba diperoleh :
=
+
−
−=
− 30
40
13
21
23
21c
Perlu dicatat bahwa matrix −a ,
−b dan
−c harus memiliki ukuran ordo yang
sama, misalnya matrix berordo 2 x 2 tidak dapat dijumlahkan atau
dikurangkan dengan matrix yang berordo 3 x 3.
Perkalian Matrix
Operasi perkalian antara dua matrix −a dan
−b sebagaimana ditunjukkan
pada Persamaan (1.10), hanya dapat dilakukan jika jumlah kolom pada
matrix −a sama dengan jumlah baris pada matrix
−b , sebagai contoh :
−−−
= bac (1.10)

5
Jika −a adalah sebuah matrix berordo m x n, maka matrix
−b harus
memiliki n buah baris. Dengan notasi subscript dapat dituliskan hasil
perkalian matrix −a dan
−b sebagai :
[ ] ej
n
e
ieij bac ∑=
=
1
(1.11)
Di mana n merupakan jumlah keseluruhan kolom pada matrix −a atau
baris pada matrix −b . Untuk matrix
−a dan
−b yang berordo 2 x 2, dalam
operasi perkaliannya akan dihasilkan :
[ ]
++
++=
2222122121221121
2212121121121111
....
....
babababa
babababacij (1.12)
Perhatikan contoh berikut :
=
− 23
12a
−=
− 02
11b
hasil perkalian −−ba . diperoleh :
−
−=
+−+
+−+=
−− 37
24
)0(2)1(3()2(2)1(3
)0(1)1(2)2(1)1(2ba
Pada umumnya operasi perkalian matrix tidak mengikuti hukum
komutatif, di mana
−−−−
≠ abba (1.13)
Validitas/kebenaran hasil perkalian antara dua buah matrix −a dan
−b
dapat diilustrasikan sebagai berikut :
−−−
= cba
)())(( ixjexjixe = (1.14)

6
di mana matrix −c yang dihasilkan akan berordo i x j; dengan jumlah baris
sama dengan baris pada matrix −a dan jumlah kolom sama dengan kolom
pada matrix −b .
Dalam operasi perkalian matrix terdapat beberapa sifat penting,
antara lain :
(a). −−−−−−−
+=
+ cabacba (distributif) (1.15)
(b). −−−−−−−
+=
+ cbcacba (distributif)
(c). −−−−−−
=
cbacba (asosiatif)
Matrix Transpose
Pada semua jenis matrix, baik yang berupa baris, kolom, persegi maupun
bujur sangkar dapat dilakukan operasi transpose. Operasi ini sering
digunakan dalam menyelesaikan permasalahan analisis struktur dengan
metode matrix kekakuan. Transpose dari suatu matrix −a dilambangkan
sebagai −
Ta . Transpose dari suatu matrix diperoleh dengan cara
menukarkan elemen baris dan kolom, sehingga elemen-elemen pada baris
pertama akan menempati kolom pertama; baris kedua menjadi kolom
kedua dan seterusnya. Operasi transpose dari matrix −a ,
[ ] [ ]Tjiij aa = (1.16)
contoh :
[ ]
=
54
23
12
a
maka

7
[ ]
=
521
432Ta
di mana kita telah menukarkan elemen elemen baris dengan kolom untuk
mendapatkan matrix transpose.
Perlu diketahui bahwa terdapat hubungan yang penting dalam operasi
transpose matrix :
TTT
abba−−−−
=
.. (1.17)
Persamaan (1.16) menunjukkan transpose dari sebuah matrix yang
merupakan hasil perkalian antara matrix −a dan
−b sama dengan hasil
perkalian antara transpose matrix −b dikalikan dengan transpose matrix
−a .
Ketentuan ini berlaku secara umum berapapun jumlah matrix yang
dioperasikan, sehingga :
TTTTT
abckkcba−−−−−−−−
=
.......... (1.18)
Transpose dari sebuah matrix kolom akan menghasilkan matrix baris.
Contoh kasus dari Persamaan (1.17) dapat dilihat di bawah ini :
=
− 43
21a
=− 6
5b
maka
=
=
−− 39
17
6
5.
43
21.ba
selanjutnya
[ ]3917. =
−−
T
ba (1.19)
Cara lain dilakukan dengan operasi transpose matrix dan hasilnya akan
dikalikan :
[ ] [ ]391742
31.65. =
=
−−
TTab (1.20)

8
Hasil dari Persamaan (1.18) dan (1.19) menunjukkan kebenaran dari
Persamaan (1.17).
Matrix Simetris
Jika sebuah matrix sama dengan transpose-nya, maka matrix tersebut
dapat dikategorikan sebagai matrix simetris; atau jika :
Taa−−
= (1.21)
misalnya matrix berikut ini :
=−
302
041
213
a
Matrix di atas tergolong matrix yang simetris karena setiap elemen ij
a−
sama dengan elemen ji
a−
untuk ji ≠ . Pada contoh di atas terlihat
diagonal utama dari arah sudut kiri atas ke arah sudut kanan bawah
merupakan garis simetri pada matrix tersebut. Perlu dicatat bahwa hanya
matrix bujur sangkar yang dapat digolongkan dalam matrix simetris.
Matrix Satuan
Matrix satuan yang juga disebut matrix identitas lazim dilambangkan
sebagai matrix −I , di mana :
−−−−−
== aaIIa .. (1.22)
Matrix satuan selalu berupa matrix bujur sangkar di mana semua
elemennya bernilai nol kecuali pada diagonal utama selalu bernilai satu.
Apabila matrix satuan dikalikan dengan suatu matrix tertentu akan
menghasilkan matrix itu sendiri.
Contoh matrix satuan yang berordo 3 x 3 :

9
=−
100
010
001
I
Determinan
Determinan matrix bujur sangkar dapat dihitung dengan
persamaan di bawah ini :
[ ]
=
2221
121122
aa
aaA x ; maka Determinan [ ] 21122211 .. aaaaAA −==
[ ]
=
333231
232221
131211
33
aaa
aaa
aaa
A x ; maka
( ) ( ) ( )312232211331233321123223332211 ......... bbbabbbabbbaA −+−−−=
Untuk matrix yang berordo lebih besar dapat digunakan persamaan
berikut :
ininiiiiik
n
k
ik cacacacaA +++== ∑=
L2211
1
(1.23)
di mana ikki
ik Mc+
−= )1( merupakan cofactor ika
dengan ikM merupakan minor ika
Perlu diketahui minor merupakan determinan dari bagian matrix [ ]A di
luar baris ke-i dan kolom ke-k.
Matrix Inverse
Matrix inverse adalah suatu matrix yang jika dikalikan dengan
matrix “asal”-nya akan menghasilkan matrix identitas. Dalam bentuk
persamaan matematis dapat dituliskan sebagai berikut :
−
−
−−−
−
−== Iaaaa
11.. (1.24)

10
Sebuah matrix akan mempunyai matrix inverse jika matrix tersebut
berbentuk bujur sangkar. Matrix inverse dapat diperoleh dengan beberapa
cara di antaranya; metode cofactor atau adjoint dan metode Gauss-Jordan.
Metode adjoint atau cofactor dapat digunakan untuk menghitung
inverse dari sebuah matrix bujur sangkar, berdasarkan persamaan berikut
ini :
−
−
−=
a
C
a
T
(1.25)
di mana −C merupakan matrix cofactor
TC−
merupakan transpose dari matrix cofactor yang
disebut sebagai matrix adjoint.
Berikut ini diberikan contoh penghitungan matrix inverse dari matrix −a ,
jika diketahui :
−
−−
=−
140
242
231
a
cofactor dari matrix −a dapat dihitung dengan :
1214
24)1(
1111 −=
−−=
+c
210
22)1(
2112 −=−=
+c
840
42)1(
3113 =
−−=
+c
1114
23)1(
1221 −=
−−=
+c
110
21)1(
2222 −=
−−−=
+c

11
440
31)1(
3223 =
−−=
+c
Analog cara di atas diperoleh, 231 −=c ; 232 −=c ; 233 −=c
maka didapatkan cofactor matrix −a :
−−−
−−
−−
=−
222
4111
8212
c
sehingga dapat ditentukan adjoint matrix
−
−−−
−−−
=−
248
212
21112T
c
selanjutnya determinan matrix −a dapat dihitung sebagai berikut :
131312121111 cacacaA ++=
10)8)(2()2)(3()12)(1( −=−+−+−−=A
maka matrix inverse 1−
−a diperoleh :
−
−−−
−−−
−==
−
−248
212
21112
10
11
A
ca
T
selanjutnya dapat diperiksa bahwa :
=−
−−100
010
0011
aa
Cara lain yang juga sering digunakan untuk menghitung inverse
dari suatu matrix adalah Metode Gauss-Jordan. Langkah-langkah yang
harus dilakukan untuk mencari inverse dari matrix −a dengan ordo n x n
dengan metode Gauss-Jordan adalah sebagai berikut :

12
(a). Tentukan matrix satuan −I dengan ordo n x n.
(b). Dengan cara operasi baris, ubahlah matrix −a menjadi matrix satuan
−I dengan tahapan sebagai berikut :
(i). Bagilah baris ke-i dengan 11a , sehingga nilai 11a bernilai sama
dengan satu.
(ii). Jumlahkan baris ke-2 dengan baris ke-1 yang telah diperkalikan
dengan (- 21a ), sehingga nilai 21a sekarang berubah menjadi
nol.
(iii). Ulangi langkah (ii) untuk baris ke-3,4,5,...,n, sehingga semua
elemen pada kolom ke-1 bernilai dama dengan nol, kecuali
elemen 11a yang bernilai sama dengan satu.
(iv). Ulangi langkah (i), (ii), (iii) untuk baris kedua, dimulai dengan
membuat nilai 122 =a , dan elemen lainnya pada kolom ke-2
bernilai sama dengan nol ( 012 =a , 032 =a , 042 =a , ..., 02 =na ).
(v). Ulangi langkah (iv) untuk baris ke-3, 4, 5, ..., n.
(vi). Proses selesai.
(c). Proses (b) sekaligus juga dilakukan terhadap marix −I sekaligus,
sehingga setelah proses selesai matrix −I telah berubah menjadi
matrix 1−
−a yang merupakan inverse dari matrix
−a .
(d). Proses keseluruhan dapat dinyatakan dalam persamaan berikut :
[ ] [ ]−
−
−−− →
1:: aI
barisoperasiIa (1.26)
Contoh :
=−
431
341
331
a

13
Untuk mencari inverse dari matrix −a dengan metode Gauss-Jordan,
dilakukan operasi baris dengan notasi Hp
ik
)( yang menunjukkan
penjumlahan pada baris ke-i dengan baris ke-k yang telah
diperkalikan dengan p, misalnya : H)2(
21 menunjukkan baris ke-2
dijumlahkan dengan 2 kali baris ke-1.
431
341
331
:
:
:
100
010
001
→
−
H)1(
21
431
010
331
:
:
:
−
100
011
001
431
010
331
:
:
:
−
100
011
001
→
−
H)1(
31
100
010
331
:
:
:
−
−
101
011
001
100
010
331
:
:
:
−
−
101
011
001
→
−
H)3(
12
100
010
301
:
:
:
−
−
−
101
011
034
100
010
301
:
:
:
−
−
−
101
011
034
→
−
H)3(
13
100
010
001
:
:
:
−
−
−−
101
011
337
Maka diperoleh
−
−
−−
=−
−101
011
3371
a
Suatu matrix yang memiliki matrix inverse disebut sebagai matrix non-
singular sedangkan matrix yang tidak memiliki inverse disebut matrix
singular, yang ditandai dengan nilai determinan sama dengan nol.
1.3. Penyelesaian Persamaan Linear dengan Metode Inversi Matrix
Dalam analisis struktur dengan metode matrix akan banyak
dijumpai bentuk-bentuk susunan persamaan linear, yang secara
matematis dapat ditulis sebagai berikut :

14
[ ]{ } { }BXA =. (1.27)
di mana :
[ ]A = Matrix bujur sangkar yang menunjukkan koefisien
persamaan linear yang dimaksud.
[ ]X = Matrix kolom dari bilangan “unknown”.
[ ]B = Matrix kolom dari “konstanta”.
Jika Persamaan (1.27) dikalikan dengan matrix [ ] 1−A , maka :
[ ] [ ]{ } [ ] { }BAXAA11 −−
=
[ ]{ } [ ] { }BAXI1−
=
{ } [ ] { }BAX1−
= (1.28)
Contoh : diketahui suatu susunan persamaan linear sebagai berikut;
x + 3y + 3z = -2
x + 4y + 3z = 0
x + 3y + 4z = 1
Persamaan di atas dapat disusun dalam bentuk matrix
[ ]{ } { }BXA =
−
=
1
0
2
431
341
331
z
y
x
maka
{ } [ ] { }BAX1−
=
−
−
−
−−
=
1
0
2
101
011
337
z
y
x
sehingga diperoleh
−
=
3
2
17
z
y
x

15
BAB 2BAB 2BAB 2BAB 2
KONSEP DASAR METODE MATRIX KEKAKUAN
2.1. Metode Matrix
Seperti telah diketahui, analisis struktur mencakup penentuan
tanggap (respons) sistem struktur terhadap gaya maupun pengaruh luar
yang bekerja pada sistem struktur tersebut. Akibat bekerjanya beban
maupun pengaruh luar lainnya, respons pertama yang terjadi adalah
adanya perubahan dari kedudukan (konfigurasi) awalnya, struktur
berpindah ke kedudukan akhir di mana terjadi keseimbangan dalam
pengaruh gaya luar. Dalam hal ini dihadapi medan perpindahan
(displacement field) yang merupakan salah satu tanggap struktur terhadap
beban atau pengaruh luar.
Perpindahan yang dialami struktur secara umum mencakup dua
bagian. Yang pertama adalah perpindahan badan kaku (rigid body
displacement) yang tidak menimbulkan reaksi dalam elemen, karena
perpindahan ini tidak menimbulkan deformasi. Yang kedua adalah
perpindahan yang menimbulkan deformasi. Perpindahan deformatif ini
akan menimbulkan gaya reaksi dalam elemen struktur maupun
perletakannya.
Dari uraian di atas dapat disimpulkan bahwa tanggap struktur
terhadap adanya gaya maupun pengaruh luar yang bekerja padanya
dapat dibedakan menjadi dua yaitu : (a) perpindahan dan (b) gaya dalam
elemen struktur dan perletakan. Dua aspek inilah yang dipelajari dan
dikaji dalam analisis struktur, dimana perpindahan dan gaya dalam
dihitung dengan memperhatikan kriteria keseimbangan (equilibrium
criteria), keselarasan (compatibility criteria) dan hubungan gaya-
perpindahan (force-displacement relationship criteria).

16
Analisis struktur dalam kebanyakan kasus yang dijumpai secara
nyata di lapangan, pada umumnya terdiri dari banyak bagian yang
tersusun secara komplex, sehingga analisis struktur statis tak tentu yang
hanya didasarkan pada prinsip-pirinsip keseimbangan tidak mungkin lagi
untuk diterapkan. Metode matrix merupakan konsep baru dalam analisis
struktur yang memungkinkan langkah idealisasi struktur untuk
menyusun persamaan-persamaan linear yang diperlukan dalam
penentuan tanggap struktur, baik yang berupa medan perpindahan
(translasi dan rotasi) maupun medan gaya (gaya aksial, gaya lintang,
momen lentur dan torsi) pada titik-titik diskrit dalam suatu struktur.
Keunggulan lain dari metode matrix adalah susunan persamaan linear
dalam penentuan perpindahan dan gaya dalam yang terjadi dapat
dijabarkan dalam bahasa program komputasi, sehingga akan
mempercepat waktu dan meningkatkan ketelitian hasil perhitungan yang
diperoleh. Dalam analisis metode matrix secara garis besar dapat
dibedakan menjadi dua yaitu; metode fleksibilitas dan metode
kekakuan. Selanjutnya pembahasan dalam diktat ini menitikberatkan
analisis struktur dengan metode kekakuan.
2.2. Metode Kekakuan
Dengan metode kekakuan (stiffness method) ini sebenarnya dicari
hubungan gaya dengan perpindahan, yang secara matematis dapat
dinyatakan :
{F} = [K].{D} (2.1)
di mana {F} menyatakan gaya-gaya yang timbul pada titik-titik diskrit
akibat terjadinya perpindahan {D} pada titik-titik tersebut. Tentu saja gaya
{F} merupakan gaya yang berhubungan (corresponding) dengan
perpindahan {D}. Sedangkan [K] menyatakan kekakuan dari struktur.

17
Metode kekakuan ini juga disebut metode perpindahan
(displacement method), karena analisis dimulai dengan menghitung
perpindahan yang terjadi pada titik-titik diskrit. Secara garis besar metode
kekakuan didasarkan pada tiga langkah utama yang merupakan prinsip
dasar analisis struktur yaitu :
(a). Keselarasan Deformasi (compatibility); yaitu kriteria yang mengatur
hubungan dari komponen perpindahan satu dengan yang lainnya,
sedemikian hingga kontinuitas perpindahan terjamin di seluruh
ataupun sebagian struktur. Dengan itu diperoleh suatu medan
perpindahan yang secara kinematis memungkinkan (kinematically
admissible). Tinjauan keselarasan deformasi ini didasarkan atas
konsep geometri. Sebagai contoh, pada tumpuan jepit tidak akan
terjadi rotasi dan translasi pada ujung batang. Contoh lain, dapat
disebutkan bahwa rotasi dan translasi harus sama pada semua ujung
batang yang bertemu pada satu titik simpul, di mana batang-batang
dihubungkan secara kaku.
(b). Persamaan Hubungan Tegangan dan Regangan (Stress-Strain
Relationship); yaitu mencari mencari besarnya gaya-gaya dalam yang
timbul sebagai akibat terjadinya perpindahan/deformasi pada
elemen-elemen struktur tersebut.
(c). Keseimbangan (equilibrium) sebagai langkah terakhir yang
menyatakan hubungan antara gaya-gaya luar yang bekerja di titik
diskrit dengan gaya-gaya dalam, atau mencari berapa besar gaya
luar di ujung elemen yang tepat diimbangi oleh gaya-gaya dalam
elemen di titik-titik diskrit.
Dengan menggabungkan ketiga prinsip dasar ini akan diperoleh
hubungan antara gaya dan perpindahan, sebagaimana dinyatakan dalam
Persamaan (2.1).

18
Perlu dicatat, karena dalam metode kekakuan ini analisis struktur
dimulai dengan penghitungan besaran perpindahan, dilanjutkan dengan
mencari hubungan antara perpindahan dengan gaya dalam yang terjadi
pada titik diskrit, maka akan sangat menguntungkan metode ini
digunakan untuk menganalisis suatu struktur di mana nilai derajat
ketidak-tentuan kinematisnya (berhubungan erat dengan derajat
kebebasan atau degree of freedom) adalah lebih kecil dari derajat ketidak-
tentuan statisnya. Dengan demikian struktur-struktur statis tak tentu yang
sering dijumpai pada kasus nyata di lapangan, akan lebih
menguntungkan bila dianalisis dengan metode kekakuan ini, karena
umumnya struktur-struktur ini memiliki derajat ketidak-tentuan statis
yang besar.
2.3. Derajat Ketidak-tentuan Kinematis
Sebagaimana telah dijelaskan pada bagian sebelumnya, dalam
analisis struktur dengan mtode matrix kekakuan langkah pertama
dilakukan dengan menghitung perpindahan di titik-titik diskrit sebagai
sasaran/tujuan yang harus dihitung. Untuk mengetahui di mana harus
dihitung besaran perpindahan yang terjadi, maka terlebih dahulu harus
diketahui berapa derajat ketidak-tentuan kinematis atau kinematic
indeterminacy degree (KID) atau derajat kebebasan pergerakan (degree of
freefom) dari sistem struktur yang tidak terkekang.
Derajat ketidak-tentuan kinematis merupakan suatu besaran yang
menyatakan jumlah komponen bebas dari perpindahan di titik diskrit
yang mungkin terjadi sebagai akibat bekerjanya beban pada sistem
struktur.
Pada struktur bidang/dua dimensi (2D) dengan perilaku titik
simpul yang kaku sempurna (jepit), umumnya akan terjadi perpindahan
berupa translasi (linear) dan rotasi (anguler) di titik-titik diskrit.

19
Tabel 2.1. Derajat Kebebasan Berbagai Jenis Struktur
Jenis Struktur Komponen Perpindahan Degree of Freedom
Setiap nodal
Plane Truss
(2D)
2
Space Truss
(3D)
3
Balok
(aksial diabaikan)
2
Plane Frame
(2D)
3
Space Frame
(3D)
6

20
Perpindahan yang berupa translasi selalu dapat dinyatakan dalam
dua komponen yang saling tegak lurus, sedangkan komponen rotasi
dinyatakan oleh satu komponen anguler. Dengan demikian pada satu titik
simpul (nodal) secara lengkap akan terjadi tiga komponen perpindahan.
Untuk struktur ruang/tiga dimensi (3D) dengan titik simpul kaku
sempurna (jepit), pada umumnya secara lengkap akan ada enam buah
komponen perpindahan di setiap nodal, yang berupa tiga komponen
translasi dan tiga komponen rotasi.
Pada bangunan rangka batang dengan perilaku sambungan sendi,
maka dengan sendirinya komponen perpindahan rotasi tidak akan
muncul. Selengkapnya derajat kebebasan pergerakan awal (initial degree of
freedom) untuk satu buah titik simpul pada berbagai jenis struktur dapat
dilihat pada Tabel 2.1. Suatu struktur dengan derajat ketidak-tentuan
kinematis sama dengan nol disebut sebagai struktur kinematis tertentu.
Tabel 2.2. Contoh Perhitungan Derajat Ketidak-tentuan Kinematis
Struktur Komponen Perpindahan Bebas
KID
0
9
7

21
Analisis struktur dengan metode kekakuan dimulai dengan
mengubah sistem struktur yang ada menjadi struktur yang tergolong
kinematis tertentu, sehingga semua perpindahan yang tidak diketahui
sama dengan nol. Agar perpindahan yang tidak diketahui (translasi dan
rotasi pada titik simpul) sama dengan nol, maka titik simpul pada
struktur harus dikekang (restrained) terhadap segala macam perpindahan
yang mungkin terjadi. Struktur yang diperoleh dengan mengekang semua
titik simpul struktur awal disebut struktur terkekang (restrained structure).
Deformasi/perpindahan yang terjadi pada suatu titik simpul akibat
bekerjanya beban besarnya sama dengan deformasi yang tidak diketahui
pada struktur awal. Untuk mempermudah tinjauan terhadap struktur
terkekang maka dilakukan analisis untuk setiap satu satuan
perpindahan/deformasi. Besaran beban atau gaya luar yang dapat
menimbulkan terjadinya satu satuan deformasi yang tak diketahui disebut
sebagai koefisien kekakuan untuk struktur terkekang, besaran inilah
yang akan digunakan sebagai dasar penyusunan matrix kekakuan
struktur.
2.4. Prosedur Analisis Struktur
Tahapan-tahapan perhitungan dalam analisis struktur dengan
metode matrix kekakuan dapat diuraikan secara detail, sebagai berikut :
(a). Tentukan model diskritisasi struktur yang akan digunakan untuk
mempresentasikan struktur dalam analisis. Tetapkan jumlah
elemen, titik simpul serta derajat kebebasan aktif (atau yang perlu
diaktifkan untuk kekangan) struktur.
(b). Tetapkan jenis elemen yang perlu digunakan serta yang mampu
memodelkan medan perpindahan struktur.

22
(c). Untuk masing-masing elemen, susun matrix kekakuan dalam tata
sumbu lokal [ki], vektor beban ekivalen pada titik diskrit [fi], matrix
transformasi [Ti] serta vektor tujuan {Ds}.
(d). Rotasikan matrix kekakuan dan vektor beban ekivalen ke tata
sumbu global.
[Ki] = [Ti]T[ki][Ti]
{Fie} = [Ti]T{fi} (2.2)
(e). Rakitkan matrix kekakuan dan vektor beban ekivalen serta beban
titik simpul ke dalam persamaan keseimbangan global, dengan
rumus :
[Ks] = Σ[Ti]T[ki][Ti]
{Fs} = {Fsj} + Σ[Ti]T{fi} (2.3)
(f). Berdasarkan hasil tahapan (e), sistem persamaan keseimbangan
dalam tata sumbu global dapat dinyatakan dalam :
[Ks]{Ds} = {Fs} (2.4)
(g). Jika terdapat kekangan, modifikasikan Persamaan Keseimbangan
(2.4) sesuai dengan kondisi batas yang ada, sehingga diperoleh :
[Ks1]{Ds} = {Fs1} (2.5)
di mana [Ks1] dan {Ds} merupakan matrix kekakuan dan vektor
beban dalam tata sumbu global yang termodifikasi akibat adanya
syarat pengekangan.
(h). Selesaikan Persamaan (2.5) untuk mendapatkan {Ds}, yang
merupakan vektor perpindahan global yang memenuhi syarat
keseimbangan struktur dan syarat kekangan (jika ada).
(i). Dengan telah diketahuinya medan perpindahan {Ds}, maka
perpindahan setiap elemen dalam tata sumbu lokal dapat dihitung
dengan :
{di} = [Ti]{Di} (2.6)

23
serta gaya dalam masing-masing elemen
{fi} = [ki]{di} - {fi0} (2.7)
di mana {fi0} merupakan vektor beban ekivalen di titik nodal.
dari urutan perhitungan di atas, analisis dapat dibagi menjadi 4
(empat) tahap utama, yaitu :
(a). Tahap data masukan dan pemodelan struktur.
(b). Tahap perakitan matrix kekakuan dan vektor gaya luar struktur
dalam tingkat elemen.
(c). Tahap solusi untuk memperoleh vektor perpindahan.
(d). Tahap penghitungan gaya dalam elemen dan pencatatan data
keluaran (output).

24
BAB 3BAB 3BAB 3BAB 3
ANALISIS STRUKTUR RANGKA BATANG BIDANG
3.1. Kekakuan Rangka batang Bidang (Plane Truss)
Struktur plane truss merupakan suatu sistem struktur yang
merupakan gabungan dari sejumlah elemen (batang) di mana pada setiap
titik simpulnya dianggap berperilaku sebagai sendi dan setiap elemennya
hanya dapat menerima gaya berupa gaya aksial (tarik ataupun tekan).
Gambar 3.1. Struktur Plane Truss
Sumbu X-Y adalah sistem koordinat global struktur, yang nantinya
diacu semua elemen. Sedangkan sumbu Z tegak lurus terhadap bidang
gambar (mengarah pembaca) mengikuti kaidah tangan kanan, sehingga
terbentuk sistem koordinat yang mengikuti right-handed rule. Sumbu x-y
merupakan sistem koordinat lokal elemen, yang hanya berlaku untuk satu
elemen tertentu saja, yang orientasinya disesuaikan dengan arah elemen
yang bersangkutan.
Setiap elemen plane truss selalu memiliki dua nodal (titik simpul)
ujung. Ujung awal elemen diberi notasi nodal i sedangkan ujung lainnya
diberi notasi j. Pusat sumbu lokal elemen adalah nodal i , dan arah sumbu
a
Y
j
i
y
X
x

25
x lokal positif selalu dibuat dari nodal i ke nodal j dari elemen tersebut.
Sumbu y lokal dibuat tegak lurus sumbu x, sedangkan sumbu lokal arah z
dibuat searah dengan sumbu Z global dan tegak lurus terhadap bidang
struktur (bidang X-Y).
Orientasi elemen secara global dapat dikenali berdasarkan sudut α,
yang dibuat oleh sumbu x lokal dari elemen yang ditinjau dengan sumbu
X global dari struktur. Sudut α diberi tanda positif berdasarkan kaidah
tangan kanan (right-handed rule), yaitu diukur dari sumbu X global
berputar menuju sumbu x lokal dengan poros sumbu Z positif, sehingga
pada gambar 3.1 sudut α akan bernilai positif jika perputaran berlawanan
dengan arah putaran jarum jam.
Hubungan antara aksi dan deformasi pada elemen plane truss
secara umum dapat diformulasikan dengan orientasi sumbu lokalnya
sebagai berikut :
Konvensi Arah Tanda Positif
Translasi Arah Aksial (satu satuan)
L
AEff ji =−=
L
AEff ji −=−=
Gambar 3.2. Hubungan Aksi-Deformasi pada Elemen Plane Truss
x
y
vi, gi vj, gj ui, fi
uj, fj
θi, mi θj, mj

26
Persamaan hubungan antara aksi dan deformasi elemen dalam
sistem koordinat lokal yang diperoleh berdasarkan prinsip superposisi
dapat diuraikan sebagai berikut :
jjiii vuL
AEvu
L
AEf .0.0 +−+=
jjiii vuvug .0.0.0.0 +++=
jjiij vuL
AEvu
L
AEf .0.0 +++−=
jjiij vuvug .0.0.0.0 +++= (3.1)
di mana :
x : sumbu batang
x, y : sistem koordinat lokal (elemen)
ui : displacement aksial pada titik nodal i
vi : displacement arah tegak lurus sumbu batang pada nodal i
fi : gaya aksial pada titik nodal i yang sesuai dengan ui
gi : gaya tegak lurus sumbu batang pada titik nodal i yang
sesuai dengan vi
Persamaan hubungan aksi-deformasi yang ditunjukkan Persamaan (3.1)
dapat dinyatakan dalam bentuk matrix :
−
−
=
j
j
i
i
j
j
i
i
v
u
v
u
L
AE
g
f
g
f
.
0000
0101
0000
0101
(3.2)
dengan :
A : Luas tampang batang
E : Modulus elastisitas batang
L : Panjang batang
Persamaan keseimbangan elemen dalam sistem koordinat lokal adalah
{ } [ ]{ }iii dkf = (3.3)

27
di mana :
{ }if : vektor gaya dalam sistem koordinat lokal
[ ]ik : matrix kekakuan elemen plane truss dalam sistem koordinat
lokal
{ }id : vektor displacement dalam sistem koordinat lokal.
Subscript i menunjukkan nomor elemen yang bersangkutan.
Selanjutnya matrix kekakuan elemen plane truss dalam sistem koordinat
lokal dapat dituliskan sebagai berikut :
[ ]
−
−
=
0000
0101
0000
0101
L
AEki (3.4)
3.2. Transformasi Sumbu
Dalam analisis struktur yang dilakukan pada kebanyakan kasus,
perlu dilakukan penyesuaian antara matrix kekakuan elemen struktur
lokal (yang mengacu sumbu lokal secara individual) ke dalam matrix
kekakuan elemen struktur global (mengacu pada sistem struktur global
yang dianut semua elemen struktur.
Penyesuaian tersebut dapat dilakukan dengan memandang titik
nodal awal i dan nodal akhir j dalam bidang X-Y (global) dari elemen
mengalami perpindahan ke nodal i’ dan j’ dalam bidang x-y (lokal),
sebagaimana diilustrasikan pada Gambar 3.3.

28
Gambar 3.3. Transformasi Sumbu Kartesian
Berdasarkan Gambar 3.3 ditunjukkan perputaran sumbu Kartesian
dari sumbu global X-Y menuju sumbu lokal x-y dengan kemiringan sudut
α, sehingga dapat diperoleh Persamaan Transformasi Sumbu yang
menunjukkan perubahan posisi suatu titik nodal dalam bentuk berikut :
αα sin.cos.X Yx += (3.5.a.)
αα cos.sin. YXy +−= (3.5.b.)
Persamaan di atas jika diubah dalam bentuk matrix, dapat
dinyatakan sebagai berikut :
−=
Y
X
y
x
αα
αα
cossin
sincos (3.6.)
Analog dengan cara di atas, transformasi koordinat untuk suatu
elemen struktur yang dibatasi oleh dua buah titk nodal (i dan j) dapat
ditunjukkan dengan persamaan berikut :
αα SinYCosXx iii .. +=
αα CosYSinXy iii .. +−=
αα SinYCosXxj jj .. +=
αα CosYSinXy jjj .. +−= (3.7.)
y
O
y
a Y
x
X
X
x
Y

29
Atau dalam bentuk matrix dapat ditulis sebagai berikut :
−
−=
j
j
i
i
j
j
i
i
Y
X
Y
X
y
x
y
x
αα
αα
αα
αα
cossin00
sincos00
00cossin
00sincos
(3.8)
analog di atas untuk vektor displacement diperoleh
−
−=
j
j
i
i
j
j
i
i
DY
DX
DY
DX
dy
dx
dy
dx
αα
αα
αα
αα
cossin00
sincos00
00cossin
00sincos
(3.9.a)
atau
{ } [ ]{ }iii DTd = (3.9.b)
sedangkan untuk transformasi gaya diperoleh :
−
−=
j
j
i
i
j
j
i
i
G
F
G
F
g
f
g
f
αα
αα
αα
αα
cossin00
sincos00
00cossin
00sincos
(3.10.a)
atau
{ } [ ]{ }iii FTf = (3.10.b)
di mana;
{ }if : vektor gaya pada koordinat lokal
{ }iF : vektor gaya pada koordinat global
{ }id : vektor displacement pada koordinat lokal
{ }iD : vektor displacement pada koordinat global
[ ]iT : matrix transformasi

30
3.3. Matrix Kekakuan Elemen dalam Koordinat Global
Sistem Persamaan Kekakuan Struktur Elemen dalam orientasi sumbu
lokal dapat ditunjukkan pada persamaan di bawah ini :
{ }if = [ ]{ }ii dk (3.11)
dengan mensubstitusikan Persamaan (3.9) dan (3.10) ke dalam Persamaan
(3.11) maka diperoleh :
[ ]{ } [ ][ ]{ }iiiii DTkFT = (3.12)
selanjutnya dengan mempra-kalikan (premultiplied) ruas kiri dan ruas
kanan Persamaan (3.12) dengan matrix [ ] 1−iT , dapat diperoleh :
[ ] [ ]{ } [ ] [ ][ ]{ }iiiiiii DTkTFTT11 −−
=
dan mengingat [ ] [ ] 11
=−
ii TT , dan [ ] [ ]Tii TT =−1 , maka
[ ] [ ] [ ][ ]{ }iiiT
ii DTkTF = (3.13)
atau
{ }iF = [ ]{ }ii DK (3.14)
yang merupakan Persamaan Keseimbangan Elemen dalam Sistem
Koordinat Global, dengan :
[ ]iK = [ ] [ ][ ]iiT
i TkT (3.15)
di mana; [ ]iK merupakan matrix kekakuan elemen dalam
sistem koordinat global.
atau
[ ]
−−
−−
−−
−−
=
22
22
22
22
..
..
..
..
scsscs
csccsc
scsscs
csccsc
L
AEKi (3.16)
di mana; s : sin α
c : cos α

31
Langkah berikutnya adalah menyusun matrix kekakuan struktur global
[ ]sK , berdasarkan prinsip kompatibilitas di mana terdapat keselarasan
perpindahan di antara elemen-elemen struktur yang ada. Matrix
kekakuan struktur global [ ]sK dapat disusun dengan metode kekakuan
langsung (direct stiffness method) berdasarkan matrix kekakuan elemen
dalam koordinat global [ ]iK , yang telah diperoleh pada tahapan
sebelumnya. Pembentukan matrix kekakuan struktur global dapat
dinyatakan dalam persamaan berikut :
[ ] [ ]∑=
=n
i
is KK
1
(3.17)
di mana; [ ]sK : matrix kekakuan struktur global
[ ]iK : matrix kekakuan elemen global
Analog dengan cara di atas, setiap vektor gaya pada titik nodal masing-
masing elemen dapat dijumlahkan untuk membentuk vektor gaya total;
[ ] [ ]∑=
=n
i
is FF
1
(3.18)
di mana; [ ]sF : vektor gaya pada sistem struktur global
[ ]iF : vektor gaya elemen pada koordinat global
3.4. Perhitungan Tegangan pada Elemen Struktur Plane Truss
Untuk keperluan penghitungan tegangan pada elemen struktur plane
truss, terlebih dahulu harus disusun sistem persamaan keseimbangan
elemen pada sumbu lokal sebagai berikut :
{ } [ ]{ }iii dkf = ;
atau
−
−=
x
x
x
x
d
d
L
AE
f
f
2
1
2
1
11
11 (3.19)

32
Tegangan aksial tarik yang terjadi pada elemen batang dapat dihitung
dengan :
A
f x2=σ (3.20)
di mana f2x merupakan gaya aksial yang bekerja pada nodal akhir suatu
elemen, yang dapat dihitung dengan cara :
[ ]
−=x
xx
d
d
L
AEf
2
12 11 (3.21)
dengan menggabungkan Persamaan (3.20) dan (3.21) diperoleh :
{ } [ ]
−=x
x
d
d
L
E
2
111σ (3.22)
atau
{ } [ ][ ]{ }DTL
E11−=σ (3.23)
yang dapat disederhanakan dalam bentuk :
{ } [ ]{ }DC '=σ (3.24)
di mana;
[ ] [ ]
−=
SC
SC
L
EC
00
0011' (3.25)
3.5. Contoh Penerapan
Contoh 3.1 : Suatu struktur plane truss tersusun dari tiga elemen batang,
seperti ditunjukkan pada Gambar 3.4, menerima beban
searah gravitasi sebesar 10.000 lb tepat pada nodal 1.
Tentukan besarnya displacement ke arah X dan Y dan
tegangan pada masing-masing elemen, jika diketahui nilai
Elastisitas (E) = 3x106 psi dan luas tampang (A) = 2 in2.

33
Gambar 3.4.
Penyelesaian :
Langkah pertama yang dilakukan adalah membentuk matrix kekakuan
elemen dalam orientasi sumbu global, sehingga perlu diketahui besaran
sudut transformasi (α) dari sumbu global ke sumbu lokal masing-masing
elemen, seperti ditunjukkan pada Tabel 3.1.
Tabel 3.1. Data Elemen Struktur pada Gambar 3.4.
Elemen α o C S C2 S2 CS
1.
2.
3.
90o
45o
0o
0
2/2
1
1
2/2
0
0
½
1
1
½
0
0
½
0
10 ft
10 ft
2 3
4
1
45o
45o
Y
X
10.000 lb
3
2
1

34
Matrix kekakuan untuk masing-masing elemen dalam orientasi sumbu
global dapat dihitung dengan cara berikut :
Elemen 1 yang berawal dari nodal 1 menuju nodal 2, menghasilkan :
[ ]
−
−=
1010
0000
1010
0000
120
)1030)(2(
2211
6
1
yxyx DDDD
xK (3.26)
Elemen 2 yang berawal dari nodal 1 menuju nodal 3, menghasilkan :
[ ]
−−
−−
−−
−−
=
5,05,05,05,0
5,05,05,05,0
5,05,05,05,0
5,05,05,05,0
2120
)1030)(2(
3311
6
2
yxyx DDDD
xK (3.27)
Elemen 3 yang berawal dari nodal 1 menuju nodal 4, menghasilkan :
[ ]
−
−
=
0000
0101
0000
0101
120
)1030)(2(
4411
6
3
yxyx DDDD
xK (3.28)
Selanjutnya ketiga matrix kekakuan elemen dalam sumbu global tersebut
digunakan untuk menyusun matrix kekakuan struktur total, dalam kasus
ini karena struktur yang dihitung terdiri dari empat titik nodal dan
masing-masing nodal mempunyai dua derajat kebebasan pergerakan
(d.o.f), maka matrix kekakuan struktur yang terbentuk nantinya akan
berukuran 8 x 8.
Pembentukan matrix kekakuan struktur total (Ks) dapat dilakukan dengan
cara menambahkan bagian-bagian matrix kekakuan elemen global (Ki) ke
dalam matrix kekakuan struktur total sesuai dengan lokasi baris dan
kolomnya, sehingga diperoleh :

35
[ ]
−
−−
−−
−
−−−
−−−
=
00000000
01000001
00354,0354,000354,0354,0
00354,0354,000354,0354,0
00001010
00000000
00354,0354,010354,1354,0
01354,0354,000354,0354,1
120
)1030)(2(
44332211
6
yxyxyxyx
s
DDDDDDDD
xK
(3.29)
atau
[ ]
−
−−
−−
−
−−−
−−−
=
00000000
01000001
00354,0354,000354,0354,0
00354,0354,000354,0354,0
00001010
00000000
00354,0354,010354,1354,0
01354,0354,000354,0354,1
)000.500(
44332211 yxyxyxyx
s
DDDDDDDD
K
Matrix kekakuan struktur global pada Persamaan (3.29), selanjutnya
dihubungkan dengan vektor gaya dan displacement dalam sumbu global,
sehingga diperoleh sistem persamaan kekakuan struktur total :
−
−−
−−
−
−−−
−−−
=
y
x
y
x
y
x
y
xyxyxyxyx
y
x
y
x
y
x
y
x
D
D
D
D
D
D
D
DDDDDDDDD
F
F
F
F
F
F
F
F
4
4
3
3
2
2
1
144332211
4
4
3
3
2
2
1
1
00000000
01000001
00354,0354,000354,0354,0
00354,0354,000354,0354,0
00001010
00000000
00354,0354,010354,1354,0
01354,0354,000354,0354,1
)000.500(
(3.30)

36
Sistem Persamaan di atas selanjutnya direduksi sesuai dengan kondisi
batas (tumpuan) yang ada dalam sistem struktur. Karena pada nodal
nomor 2, 3 dan 4 merupakan tumpuan sendi, maka hanya dimungkinkan
terjadinya pergerakan pada nodal 1 ke arah X dan Y (D1x dan D1y).
Selanjutnya dapat dibentuk sistem persamaan kekakuan struktur yang
telah direduksi :
=
− y
x
D
D
1
1
354,1354,0
354,0354,1)000.500(
000.10
0 (3.31)
Persamaan (3.31) dapat diselesaikan dengan metode inversi matrix :
−=
−
−
−=
−
−
−−
−−
inchix
inchix
xx
xx
D
D
y
x
2
2
67
76
1
1
1059,1
10414,0
000.10
0
10585,11014,4
1014,410585,1
Tanda minus (-) pada arah D1y menunjukkan bahwa komponen
displacement pada nodal 1 dalam arah Y, hasilnya berkebalikan dengan
arah Y posistif, dengan kata lain perpindahan terjadi menuju ke bawah.
Perhitungan tegangan pada elemen batang dapat dilakukan dengan
menggunakan Persamaan (3.23) dan memanfaatkan Tabel (3.1), sehingga
untuk masing-masing elemen didapatkan :
Elemen 1 :
[ ] psi
D
D
xD
xD
x
y
x
y
x
3965
0
0
1059,1
10414,0
1010120
1030
2
2
21
21
6
1 =
=
=
−=
=
−=−
−
σ
Elemen 2 :
psi
D
D
xD
xD
x
y
x
y
x
1471
0
0
1059,1
10414,0
2
2
2
2
2
2
2
2
2120
1030
3
3
21
21
6
2 =
=
=
−=
=
−−=
−
−
σ

37
Elemen 3 :
[ ] psi
D
D
xD
xD
x
y
x
y
x
1035
0
0
1059,1
10414,0
0101120
1030
4
4
21
21
6
3 −=
=
=
−=
=
−=−
−
σ
Kebenaran hasil perhitungan di atas dapat diperiksa dengan cara berikut :
0)2)(1035(2
2)2)(1471(0 22 =−=∑ inpsiinpsiFx
0000.102
2)2)(1471()2)(3965(0 22 =−+=∑ inpsiinpsiFy
Contoh 3.2 : Suatu struktur plane truss tersusun dari dua elemen batang,
seperti ditunjukkan pada Gambar 3.5, menerima beban
horisontal sebesar 1000 kN tepat pada nodal 1. Selain itu
pada nodal 1 juga terjadi penurunan (vertical settlement)
sebesar δ = 50 mm. Tentukan besarnya displacement nodal 1
ke arah sumbu Y dan gaya aksial pada masing-masing
elemen, jika diketahui nilai Elastisitas (E) = 210 GPa dan luas
tampang (A) = 6 cm2.
Gambar 3.5
X
Y
1 3
2
3 m
4 m
δ = 50 mm
1
2 1000 kN

38
Penyelesaian :
Data Geometri Struktur
Tabel 3.2. Data Elemen Struktur pada Gambar 3.5.
Elemen α o C S C2 S2 CS
1.
2.
90o
53o
0
0,60
1
0,80
0
0,36
1
0,64
0
0,48
Penyusunan Matrix Kekakuan Elemen Global ;
Elemen 1 :
[ ]
−−
−−
−−
−−
=−
64,048,064,048,0
48,036,048,036,0
64,048,064,048,0
48,036,048,036,0
5
)/10210)(106(
2211
2624
1
yxyx DDDD
m
mkNxmxK
atau;
[ ]
−−
−−
−−
−−
=
64,048,064,048,0
48,036,048,036,0
64,048,064,048,0
48,036,048,036,0
)200.25(
2211
1
yxyx DDDD
K (3.32)
Elemen 2 :
[ ]
−
−=−
1010
0000
1010
0000
4
)/10210)(106(
3311
2624
2
yxyx DDDD
m
mkNxmxK
atau;

39
[ ]
−
−=
25,1025,10
0000
25,1025,10
0000
)200.25(
3311
2
yxyx DDDD
K (3.33)
Penyusunan Matrix Kekakuan Struktur Global :
[ ]
−
−−
−−
−−−
−−
=
25,100025,10
000000
0064,048,064,048,0
0048,036,048,036,0
25,1064,048,089,148,0
0048,036,048,036,0
)200.25(
332211 yxyxyx
s
DDDDDD
K (3.34)
Penyusunan Sistem Persamaan Kekakuan Struktur Total :
−
−−
−−
−−−
−−
=
y
x
y
x
y
xyxyxyx
y
x
y
x
y
x
D
D
D
D
D
DDDDDDD
F
F
F
F
F
F
3
3
2
2
1
1332211
3
3
2
2
1
1
25,100025,10
000000
0064,048,064,048,0
0048,036,048,036,0
25,1064,048,089,148,0
0048,036,048,036,0
)200.25( (3.35)
Penyusunan Sistem Persamaan Kekakuan Struktur yang Telah Direduksi :
Kasus di atas memiliki kondisi batas (boundary conditions) sebagai berikut;
D1x = δ; D2x = 0; D2y = 0; D3x = 0; D3y = 0
Sehingga diperoleh Persamaan :
−==
=
y
x
D
mD
P 1
1 05,0
89,148,0
48,036,0)200.25(
0 δ (3.36)
)89,148,0(200.25 1yDP += δ
yD147628)8,604(1000 +−=

40
mD y 0337,047628
)8,6041000(1 =
+=
Penghitungan Gaya Aksial masing-masing elemen;
Elemen 1 :
−
−=
x
x
x
x
d
d
L
AE
f
f
2
1
2
1
11
11
atau
−
−=
y
x
y
x
x
x
D
D
D
D
SC
SC
L
AE
f
f
2
2
1
1
2
1
00
00
11
11
=
=
=
−=
−
−=
0
0
0337,0
05,0
80,060,000
0080,060,0
11
11)200.25(
2
2
1
1
2
1
y
x
y
x
x
x
D
D
D
D
f
f (3.37)
maka diperoleh :
f1x = -76,6 kN dan f1y = 76,6 kN
atau pada elemen 1 menerima gaya aksial tarik sebesar 76,6 kN.
Elemen 2 :
=
=
=
−=
−
−=
0
0
0337,0
05,0
1000
0010
11
11)500.31(
3
3
1
1
3
1
y
x
y
x
x
x
D
D
D
D
f
f (3.38)
maka diperoleh :
f1x = 1061 kN dan f1y = -1061 kN
atau pada elemen 1 menerima gaya aksial tekan sebesar 1061 kN.

41
BAB 4BAB 4BAB 4BAB 4
ANALISIS STRUKTUR BALOK
4.1. Kekakuan Balok (Beam)
Struktur beam merupakan suatu sistem struktur yang merupakan
gabungan dari sejumlah elemen (batang) yang lurus (a = 0) di mana pada
setiap titik simpulnya dianggap berperilaku sebagai jepit dan setiap
elemennya dapat menerima gaya berupa gaya aksial, geser dan momen
lentur. Pembahasan dalam bab ini hanya dipelajari struktur balok yang
tidak menerima pengaruh (beban) aksial.
Gambar 4.1. Struktur Beam
Sumbu X-Y adalah sistem koordinat global struktur, yang nantinya
diacu semua elemen. Sedangkan sumbu Z tegak lurus terhadap bidang
gambar (mengarah pembaca) mengikuti kaidah tangan kanan, sehingga
terbentuk sistem koordinat yang mengikuti right-handed rule. Sumbu x-y
merupakan sistem koordinat lokal elemen, yang hanya berlaku untuk satu
elemen tertentu saja, yang orientasinya disesuaikan dengan arah elemen
yang bersangkutan.
Setiap elemen balok selalu memiliki dua nodal (titik simpul) ujung.
Ujung awal elemen diberi notasi nodal i sedangkan ujung lainnya diberi
notasi j. Pusat sumbu lokal elemen adalah nodal i , dan arah sumbu x lokal
X
Y

42
positif selalu dibuat dari nodal i ke nodal j dari elemen tersebut. Sumbu y
lokal dibuat tegak lurus sumbu x, sedangkan sumbu lokal arah z dibuat
searah dengan sumbu Z global dan tegak lurus terhadap bidang struktur
(bidang X-Y).
Orientasi elemen secara global dapat dikenali berdasarkan sudut α,
yang dibuat oleh sumbu x lokal dari elemen yang ditinjau dengan sumbu
X global dari struktur. Sudut α diberi tanda positif berdasarkan kaidah
tangan kanan (right-handed rule), yaitu diukur dari sumbu X global
berputar menuju sumbu x lokal dengan poros sumbu Z positif.
Selanjutnya karena semua elemen tersusun segaris (lurus), seperti terlihat
pada gambar 4.1, maka sudut transformasi (α) akan bernilai nol.
Hubungan antara aksi dan deformasi pada elemen balok secara
umum dapat diformulasikan dengan orientasi sumbu lokalnya sebagai
berikut :
Konvensi Arah Tanda Positif
Transalasi Melintang (satu satuan)
2
6
L
EImm ji ==
3
12
L
EIgg ji =−=
vi, gi vj, gj ui, fi
uj, fj
θi, mi θj, mj

43
2
6
L
EImm ji −==
3
12
L
EIgg ji −=−=
Rotasi Akibat Lentur (satu satuan)
L
EImi
2= ;
L
EIm j
4=
2
6
L
EIgg ji =−=
L
EImi
4= ;
L
EIm j
2=
2
6
L
EIgg ji =−=
Gambar 4.2. Hubungan Aksi-Deformasi pada Elemen Beam
Persamaan hubungan antara aksi dan deformasi elemen balok dalam
sistem koordinat lokal yang diperoleh berdasarkan prinsip superposisi
dapat diuraikan sebagai berikut :
jjiiiL
EIv
L
EI
L
EIv
L
EIg θθ .
6.
12.
6.
12
2323
+
−+
+
=
jjiiiL
EIv
L
EI
L
EIv
L
EIm θθ .
2.
6.
4.
6
22
+
−+
+
=
jjiijL
EIv
L
EI
L
EIv
L
EIg θθ .
6.
12.
6.
12
2323
−+
+
−+
−=

44
jjiijL
EIv
L
EI
L
EIv
L
EIm θθ .
4.
6.
2.
6
22
+
−+
+
= (4.1)
di mana :
x : sumbu batang
x, y : sistem koordinat lokal (elemen)
vi : displacement arah tegak lurus sumbu batang pada nodal i
θi : rotasi pada titik nodal i
gi : gaya tegak lurus sumbu batang pada titik nodal i yang
sesuai dengan vi
mi : momen lentur pada titik nodal i yang selaras dengan θi
Persamaan hubungan aksi-deformasi yang ditunjukkan Persamaan (4.1)
dapat dinyatakan dalam bentuk matrix :
−
−−−
−
−
=
j
j
i
i
j
j
i
i
v
v
LLLL
LL
LLLL
LL
L
EI
m
g
m
g
θ
θ.
4626
612612
2646
612612
22
22
3 (4.2)
sehingga diperoleh matrix kekakuan elemen lokal sebagai berikut :
[ ] .
4626
612612
2646
612612
22
22
3
−
−−−
−
−
=
LLLL
LL
LLLL
LL
L
EIki (4.3)
4.2. Beban Sepanjang Elemen balok (Element Loads)
Analisis struktur dengan metode matrix kekakuan mensyaratkan
bahwa beban yang bekerja harus berada tepat di titik simpul, sehingga
dapat disusun sistem persamaan kekakuan struktur. Dalam
kenyataannya, struktur balok maupun portal pada umumnya juga
menerima beban yang bekerja di sepanjang bentang elemen struktur
(element load). Agar dapat dibentuk persamaan kekakuan struktur, maka

45
beban-beban yang berupa element load harus dipindahkan menjadi beban
setara yang bekerja di dua nodal dalam elemen yang bersangkutan. Beban
setara pada dua titik nodal akibat adanya beban yang bekerja di sepanjang
bentang elemen disebut sebagai equivalent joint load, di mana kasus yang
sering dijumpai berikut cara perhitungannya disajikan pada Tabel 4.1.
Apabila semua komponen equivalent joint load yang dibutuhkan
telah terhitung, maka sekarang semua beban telah terletak di titik nodal
dalam sistem struktur, selanjutnya dapat dibentuk sistem persamaan
kekakuan struktur total dalam orientasi sumbu global sebagai berikut :
{ } [ ]{ } { }0FDKF s −= (4.4)
di mana; { }0F : vektor beban berupa equivalent joint load.
{ } [ ] { }iT
i fTF 00 =
{ }F : vektor beban yang berupa nodal load.
[ ]sK : Matrix Kekakuan Struktur Total.
{ }D : vektor displacement sumbu global.
selanjutnya sistem persamaan kekakuan elemen struktur dalam orientasi
sumbu lokal dinyatakan dalam persamaan berikut :
{ } [ ]{ } { }iiii fdkf 0−= (4.5)
atau { } [ ][ ]{ } [ ]{ }iiiiii FTDKTf 0−=
di mana; { }if : gaya dalam elemen (sumbu lokal).
{ }if0 : vektor beban yang berupa equivalent joint load
(sumbu lokal).
[ ]ik : matrix kekakuan elemen lokal.
{ }id : vektor displacement elemen sumbu lokal.
[ ]iK : matrix kekakuan elemen global.
[ ]iD : vektor displacement elemen sumbu global.
[ ]iT : matrix transformasi elemen.

46
Tabel 4.1. Beban Titik Ekuivalen
No. f1y m1 Kasus Pembebanan f2y m2
1.
2
P−
8
PL−
2
P−
8
PL
2.
3
2 )2(
L
aLPb +−
2
2
L
Pab−
3
2 )2(
L
bLPa +−
2
2
L
bPa
3.
P−
( )PLαα −− 1
P−
( )PLαα −1
4.
2
.Lw−
12
2wL−
2
.Lw−
12
2wL
5.
20
7wL−
20
2wL−
20
3wL−
30
2wL
6.
4
wL−
96
5 2wL−
4
wL−
96
5 2wL
L/2 L/2
P
b a
P
P P
aL aL
w
L
L
w
L
w

47
4.3. Contoh Penerapan
Contoh 4.1 : Suatu struktur balok kantilever sepanjang l = 10 ft seperti
ditunjukkan pada Gambar 4.3, menerima beban merata
searah gravitasi sebesar w = 1800 lb/ft di sepanjang batang.
Tentukan besarnya displacement ke arah X dan Y serta
besarnya gaya dalam pada masing-masing nodal, jika
diketahui nilai Elastisitas (E) = 3x107 psi dan inersia
tampang (I) = 200 in4.
Dalam kasus ini hanya terdapat satu elemen balok, sehingga matrix
kekakuan struktur global dapat disusun sebagai berikut :
[ ]
−
−−−
−
−
=
22
22
2211
3
4626
612612
2646
612612
LLLL
LL
LLLL
LL
DD
L
EIK
yy
s
θϑ
(4.6)
mengingat nodal 1 merupakan tumpuan jepit, maka kondisi batas
(boundary conditions) yang dapat diterapkan dalam kasus ini adalah :
D1X = 0 dan θi = 0
Y
X
w
l
2
wl
2
wl
12
2wl
12
2wl

48
sehingga diperoleh sistem persamaan kekakuan struktur yang telah
direduksi dalam bentuk sebagai berikut :
{ } { } [ ]{ }DKFF s=+ 0
−
−=
+
2
223
0
2
2
2
46
612
θ
y
z
yy D
LL
L
L
EI
M
F
M
F (4.7)
di mana { }0F merupakan vektor equivalent joint load
Persamaan di atas dapat diselesaikan untuk memperoleh besaran D2X dan
θ2 sebagai berikut :
−
=
12
2
126
64.
12
12
23
22
2
wL
wL
L
LL
EI
L
L
D y
θ
atau;
−
=
12
2
63
32
62
2
2
2
wL
wL
L
LL
EI
LD y
θ (4.8)
sehingga diperoleh :
−
−
=
−
−
=
−
−
=
rad
inchi
xxx
x
xxx
x
EI
wL
EI
wLD y
0072,0
648,0
2001036
)1210)(12/1800(
2001038
)1210)(12/1800(
6
8
7
3
7
4
3
4
2
2
θ (4.9)
Gaya dalam pada setiap titik nodal dapat dihitung menurut persamaan
berikut :
{ } [ ]{ } { }0FDKF s −=
atau;

49
02
2
1
1
3
4
22
22
2211
2
2
1
1
6
8
0
0
4626
612612
2646
612612
−
−
−
−
−−−
−
−
=
M
F
M
F
EI
wL
EI
wL
LLLL
LL
LLLL
LL
DD
L
EI
M
F
M
F
y
yyy
y
y
θϑ
(4.10)
=
=
−
−
−
−
−=
0
02
)1210()12/1800(
)1210()12/1800(
0
02
12
2
12
2
12
2
12
5
2
22
2
2
2
2
2
2
1
1xx
xx
wL
wL
wL
wL
wL
wL
wL
wL
wL
wL
M
F
M
F
y
y
(4.11)
=
0
0
.1080000
18000
2
2
1
1
inlb
lb
M
F
M
F
y
y
(4.12)
di mana F1y dan M1 merupakan reaksi pada tumpuan jepit di nodal 1.

50
BAB 5BAB 5BAB 5BAB 5
ANALISIS STRUKTUR PORTAL BIDANG
5.1. Kekakuan Portal Bidang (Plane Frame)
Struktur plane frame merupakan suatu sistem struktur yang
merupakan gabungan dari sejumlah elemen (batang) di mana pada setiap
titik simpulnya dianggap berperilaku sebagai jepit dan setiap elemennya
hanya dapat menerima gaya berupa gaya aksial, gaya geser dan momen
lentur.
Gambar 5.1. Struktur Plane Frame
Sumbu X-Y adalah sistem koordinat global struktur, yang nantinya
diacu semua elemen. Sedangkan sumbu Z tegak lurus terhadap bidang
gambar (mengarah pembaca) mengikuti kaidah tangan kanan, sehingga
terbentuk sistem koordinat yang mengikuti right-handed rule. Sumbu x-y
merupakan sistem koordinat lokal elemen, yang hanya berlaku untuk satu
elemen tertentu saja, yang orientasinya disesuaikan dengan arah elemen
yang bersangkutan.
X
a Y

51
Setiap elemen plane frame selalu memiliki dua nodal (titik simpul)
ujung. Ujung awal elemen diberi notasi nodal i sedangkan ujung lainnya
diberi notasi j. Pusat sumbu lokal elemen adalah nodal i , dan arah sumbu
x lokal positif selalu dibuat dari nodal i ke nodal j dari elemen tersebut.
Sumbu y lokal dibuat tegak lurus sumbu x, sedangkan sumbu lokal arah z
dibuat searah dengan sumbu Z global dan tegak lurus terhadap bidang
struktur (bidang X-Y).
Orientasi elemen secara global dapat dikenali berdasarkan sudut α,
yang dibuat oleh sumbu x lokal dari elemen yang ditinjau dengan sumbu
X global dari struktur. Sudut α diberi tanda positif berdasarkan kaidah
tangan kanan (right-handed rule), yaitu diukur dari sumbu X global
berputar menuju sumbu x lokal dengan poros sumbu Z positif, sehingga
pada gambar 5.1 sudut α akan bernilai positif jika perputaran berlawanan
dengan arah putaran jarum jam.
Hubungan antara aksi dan deformasi pada elemen plane frame
secara umum dapat diformulasikan dengan orientasi sumbu lokalnya
sebagai berikut :
Konvensi Arah Tanda Positif
Translasi Arah Aksial (satu satuan)
L
AEff ji =−=
L
AEff ji −=−=
vi, gi vj, gj ui, fi
uj, fj
θi, mi θj, mj

52
Transalasi Melintang (satu satuan)
2
6
L
EImm ji ==
3
12
L
EIgg ji =−=
2
6
L
EImm ji −==
3
12
L
EIgg ji −=−=
Rotasi Akibat Lentur (satu satuan)
L
EImi
2= ;
L
EIm j
4=
2
6
L
EIgg ji =−=
L
EImi
4= ;
L
EIm j
2=
2
6
L
EIgg ji =−=
Gambar 5.2. Hubungan Aksi-Deformasi pada Elemen Plane Frame
Persamaan hubungan antara aksi dan deformasi elemen portal bidang
dalam sistem koordinat lokal yang diperoleh berdasarkan prinsip
superposisi dapat diuraikan sebagai berikut :
jjjiii vuL
AEvu
L
AEf θθ .0.0..0.0. 1 ++
−+++
=

53
jjjiiiL
EIv
L
EIu
L
EIv
L
EIug θθ .
6.
12.0.
6.
12.0
23231
+
−++
+
+=
jjjiiiL
EIv
L
EIu
L
EIv
L
EIum θθ .
2.
6.0.
4.
6.0
221
+
−++
+
+=
jjjiij vuL
AEvu
L
AEf θθ .0.0..0.0. 1 ++
+++
−=
jjjiijL
EIv
L
EIu
L
EIv
L
EIug θθ .
6.
12.0.
6.
12.0
23231
−+
++
−+
−+=
jjjiijL
EIv
L
EIu
L
EIv
L
EIum θθ .
2.
6.0.
4.
6.0
221
+
−++
+
+= (5.1)
di mana :
x : sumbu batang
x, y : sistem koordinat lokal (elemen)
ui : displacement aksial pada titik nodal i
vi : displacement arah tegak lurus sumbu batang pada nodal i
θi : rotasi pada titik nodal i
fi : gaya aksial pada titik nodal i yang sesuai dengan ui
gi : gaya tegak lurus sumbu batang pada titik nodal i yang
sesuai dengan vi
mi : momen lentur pada titik nodal i yang selaras dengan θi
Persamaan hubungan aksi-deformasi yang ditunjukkan Persamaan (5.1)
dapat dinyatakan dalam bentuk matrix :

54
−
−−−
−
−
−
−
=
j
j
j
i
i
i
j
j
j
i
i
i
v
u
v
u
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AEL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AE
m
g
f
m
g
f
θ
θ
460
260
6120
6120
0000
260
460
6120
6120
0000
22
2323
22
2323
(5.2)
sehingga diperoleh matrix kekakuan elemen lokal sebagai berikut :
[ ]
−
−−−
−
−
−
−
=
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AEL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AE
ki
460
260
6120
6120
0000
260
460
6120
6120
0000
22
2323
22
2323
(5.3)
5.2. Transformasi Sumbu
Dalam analisis struktur yang dilakukan pada kebanyakan kasus,
perlu dilakukan penyesuaian antara matrix kekakuan elemen struktur
lokal (yang mengacu sumbu lokal secara individual) ke dalam matrix
kekakuan elemen struktur global (mengacu pada sistem struktur global
yang dianut semua elemen struktur.
Penyesuaian tersebut dapat dilakukan dengan memandang titik
nodal awal i dan nodal akhir j dalam bidang X-Y (global) dari elemen
mengalami perpindahan ke nodal i’ dan j’ dalam bidang x-y (lokal),
sebagaimana diilustrasikan pada Gambar 5.3.

55
Gambar 5.3. Transformasi Sumbu Kartesian
Berdasarkan Gambar 5.3 ditunjukkan perputaran sumbu Kartesian
dari sumbu global X-Y menuju sumbu lokal x-y dengan kemiringan sudut
α, sehingga dapat diperoleh Persamaan Transformasi Sumbu yang
menunjukkan perubahan posisi suatu titik nodal dalam bentuk berikut :
αα sin.cos.X Yx += (5.4.a.)
αα cos.sin. YXy +−= (5.4.b.)
Zz θθ = (5.4.c.)
Persamaan di atas jika diubah dalam bentuk matrix, dapat
dinyatakan sebagai berikut :
−=
Zz
Y
X
y
x
θ
αα
αα
θ 100
0cossin
0sincos
(5.5)
Analog dengan cara di atas, transformasi koordinat untuk suatu
elemen struktur yang dibatasi oleh dua buah titk nodal (i dan j) dapat
ditunjukkan dengan persamaan berikut :
αα SinYCosXx iii .. +=
αα CosYSinXy iii .. +−=
Zizi θθ =
y
O
y
a Y
x
X
X
x
Y

56
αα SinYCosXxj jj .. +=
αα CosYSinXy jjj .. +−=
Zjzj θθ = (5.6.)
Atau dalam bentuk matrix dapat ditulis sebagai berikut :
−
−
=
Zj
j
j
Zi
i
i
Zj
j
j
zi
i
i
Y
X
Y
X
y
x
y
x
θ
θ
αα
αα
αα
αα
θ
θ
100000
0cossin000
0sincos000
000100
0000cossin
0000sincos
(5.7)
sehingga diperoleh Matrix Transformasi [Ti], untuk elemen portal adalah :
[ ]
−
−
=
100000
0cossin000
0sincos000
000100
0000cossin
0000sincos
αα
αα
αα
αα
iT (5.8)
selanjutnya Matrix Kekakuan Elemen Global dapat disusun dengan
persamaan berikut :
[ ]iK = [ ] [ ][ ]iiT
i TkT (5.9)
di mana; [ ]iK : matrix kekakuan elemen dalam sistem
koordinat global.
[ ]iT : matrix transformasi elemen
[ ]ik : matrix kekakuan elemen dalam sistem
koordinat lokal.
atau;

57
[ ] XL
EKi =
−+
−+
−
+−
−−+
−
−−
+−−
−+
I
CL
IC
L
IAS
SL
ICS
L
IAS
L
IAC
ICL
IS
L
II
CL
IC
L
IASCS
L
IAC
L
IC
L
IAS
SL
ICS
L
IAS
L
IACS
L
ICS
L
IAS
L
IAC
4
612
61212
266
4
61212612
6121261212
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
(5.10)
di mana; s : sin α
c : cos α
5.3. Contoh Penerapan
Contoh 5.1 : Suatu struktur portal bidang dengan perletakan jepit pada
nodal 1 dan 4 seperti ditunjukkan pada Gambar 5.4,
menerima beban horisontal positif sebesar 10.000 lb di nodal
2 dan momen positif sebesar 5000 lb.in di nodal 3. Tentukan
besarnya displacement ke arah X dan Y serta besarnya gaya
dalam pada masing-masing elemen, jika diketahui nilai
Elastisitas semua elemen (E) = 3x107 psi, luas penampang
semua elemen (A) = 10 in2 dan inersia tampang (I) = 200 in4
untuk elemen 1 dan 3 serta I = 100 in4 untuk elemen 2.

58
2 3
1 4
Gambar 5.4. Struktur Plane Frame
Penyelesaian :
Dengan memanfaatkan Persamaan (5.10) dapat diperoleh matrix
kekakuan elemen global sebagai berikut :
Elemen 1
Elemen 1 diasumsikan mengarah dari nodal 1 ke nodal 2, dengan sudut
transformasi α antara sumbu global X dan sumbu lokal x sebesar 90o
sehingga :
cos α = 0 dan sin α = 1
sedangkan :
167,0)1210(
)200(1212
22==
xL
I
0,10)1210(
)200(66==
xL
I
000.250)1210(
1030 6
==x
x
L
E
maka dengan menggunakan Persamaan (5.10) diperoleh :
5000 lb-in
X
Y
10.000 lb
10 ft
10 ft
1
2
3

59
[ ]
−
−
−
−
−
−−−
=
800010400010
01000100
100167,0100167,0
400010800010
01000100
100167,0100167,0
000.250
222111
1
θθ yxyx DDDD
K (5.11)
Elemen 2 diasumsikan mengarah dari nodal 2 ke nodal 3, dengan sudut
transformasi α antara sumbu global X dan sumbu lokal x sebesar 0o
sehingga :
cos α = 1 dan sin α = 0
sedangkan :
0835,0)1210(
)100(1212
22==
xL
I
0,5)1210(
)100(66==
xL
I
000.250)1210(
1030 6
==x
x
L
E
maka dengan menggunakan Persamaan (5.10) diperoleh :
[ ]
−
−−
−
−
−
=
4005020050
50835,0050835,00
00100010
2005040050
50835,0050835,00
00100010
000.250
333222
2
θθ yxyx DDDD
K (5.12)

60
Elemen 3 diasumsikan mengarah dari nodal 3 ke nodal 4, dengan sudut
transformasi α antara sumbu global X dan sumbu lokal x sebesar 270o
sehingga :
cos α = 0 dan sin α = -1
sedangkan :
sedangkan :
167,0)1210(
)200(1212
22==
xL
I
0,10)1210(
)200(66==
xL
I
000.250)1210(
1030 6
==x
x
L
E
maka dengan menggunakan Persamaan (5.10) diperoleh :
[ ]
−
−
−−−
−
−
−
=
800010400010
01000100
100167,0100167,0
400010800010
01000100
100167,0100167,0
000.250
444333
3
θθ yxyx DDDD
K (5.13)
Selanjutnya dengan melakukan superposisi Persamaan (5.11), (5.12) dan
(5.13) dan dengan menerapkan kondisi batas (boundary conditions) D1x = 0,
D1y = 0, θ1 = 0, D4x = 0, D4y = 0 dan θ4 = 0 maka dapat diperoleh sistem
persamaan kekakuan struktur yang telah direduksi sebagai berikut :

61
−
−−
−
−
−
=
3
3
3
2
2
2
120051020050
5084,1005084,00
100167,100010
200501200510
5834,005084,100
0010100167,10
000.250
5000
0
0
0
0
000.10
θ
θ
y
x
y
x
D
D
D
D
(5.14)
Persamaan (5.14) di atas dapat diselesaikan dengan matode inversi matrix,
sehingga diperoleh :
−
−
−=
rad
in
in
rad
in
in
D
D
D
D
y
x
y
x
00149,0
00148,0
209,0
00153,0
00148,0
211,0
3
3
3
2
2
2
θ
θ (5.15)
Untuk menghitung gaya dalam masing-masing elemen dapat digunakan
Persamaan berikut :
{ } [ ]{ }iii FTf =
atau;
{ } [ ][ ]{ }iiii DKTf = (5.16)
sehingga gaya dalam pada elemen 1 diperoleh sebesar :
{ } [ ][ ]{ }1111 DKTf =
−
−
−
−
−
−
−−−
−
−
=
00153,0
00148,0
211,0
0
0
0
800010400010
01000100
100167,0100167,0
400010800010
01000100
100167,0100167,0
000.250
100000
001000
010000
000100
000001
000010222111
2
2
2
1
1
1
θθ yxyx
y
x
y
x
DDDD
m
f
f
m
f
f
(5.17)

62
sehingga diperoleh :
−
−
−
−
=
inlb
lb
lb
inlb
lb
lb
m
f
f
m
f
f
y
x
y
x
000.223
4990
3700
000.376
4990
3700
2
2
2
1
1
1
(5.18)
Analog dengan cara di atas maka dapat diperoleh :
Gaya Dalam Elemen 2 :
−−
−
−−
−
=
inlb
lb
lb
inlb
lb
lb
m
f
f
m
f
f
y
x
y
x
000.221
3700
5010
000.223
3700
5010
3
3
3
2
2
2
(5.19)
2
1
223.000 lb-in
376.000 lb-in
3770 lb
3770 lb
4990 lb
4990 lb
z
y
x

63
Gaya Dalam Elemen 3 :
−
−
−
−=
inlb
lb
lb
inlb
lb
lb
m
f
f
m
f
f
y
x
y
x
000.375
5010
3700
000.226
5010
3700
4
4
4
3
3
3
(5.20)
Contoh 5.2 : Sebuah elemen batang nomor 2 digunakan untuk
memperkaku elemen balok kantilever bernomor 1 seperti
ditunjukkan pada Gambar 5.5. Hitung besarnya
perpindahan nodal 1 dan gaya dalam masing-masing
elemen, jika diketahui nilai Elastisitas semua elemen (E) =
210 GPa, luas penampang semua elemen 2 (A2) = 1 x 10-3 m2,
luas tampang elemen balok 1 (A1) = 2 x 10-3 m2 dengan
inersia tampang (I) = 5 x 10-5 m4. Sudut antara elemen 1 dan
2 sebesar 45o, dengan beban sebesar 500 kN searah gravitasi
di titik nodal 1.
Gambar 5.5 Balok Kantilever dengan Pengaku
Y
X
45o
1
2
500 kN
1
3
2
3 m

64
Penyelesaian :
Mengingat nodal nomor 2 dan 3 merupakan tumpuan jepit dan sendi,
maka hanya dibutuhkan matrix kekakuan di nodal 1 untuk dapat
menghitung perpindahan yang terjadi pada sistem struktur tersebut.
Elemen 2 merupakan batang pengaku, sehingga hanya dapat menerima
gaya aksial sebagaimana perilaku elemen plane truss, sehingga matrix
kekakuan elemen global dapat dihitung menurut Persamaan (3.16), maka ;
[ ]
=
−
5,05,0
5,05,0
45cos3
)10210)(101( 63
2
o
xxK
atau;
[ ]
=
354,0354,0
354,0354,01070
113
2
yx DD
xK (5.21)
sedangkan matrix kekakuan elemen global untuk balok (dengan
memperhitungkan pengaruh aksial) digunakan Persamaan (5.10) sehingga
diperoleh :
[ ]
=
20,010,00
10,0067,00
0021070
111
31
θyx DD
xK (5.22)
di mana (E/L) x 10-3 merupakan skalar pada Persamaan (5.22)
Selanjutnya dapat dibentuk matrix kekakuan struktur global yang telah
direduksi :
[ ]
=
20,010,00
10,0421,0354,0
0354,0354,2
1070 3xKs (5.23)

65
sehingga dapat dibentuk sistem persamaan kekakuan struktur tereduksi
sebagai berikut :
=
−
1
1
13
20,010,00
10,0421,0354,0
0354,0354,2
1070
0
500
0
θ
y
x
D
D
x (5.24)
Penyelesaian Persamaan (5.24) menghasilkan :
−=
rad
m
m
D
D
y
x
0113,0
0225,0
00338,0
1
1
1
θ
(5.25)
Persamaan umum yang dapat digunakan untuk menghitung gaya dalam
setiap elemen adalah fi = ki.di. Untuk elemen batang (truss) gaya dalam
elemen dapat dihitung dengan :
−
−=
y
x
y
x
x
x
D
D
D
D
SC
SC
L
AE
f
f
3
3
1
1
3
1
00
00
11
11 (5.26)
Triple product ketiga matrix di atas menghasilkan :
( )yxx DSinDCosL
AEf 111 .. αα += (5.27)
untuk kasus ini;
−+=
−
)0225,0(2
2)00338,0(
2
2
24,4
)/10210)(101( 2623
1m
mkNxmxf x
maka diperoleh :
kNf x 6701 −=
di mana tanda negatif menunjukkan arah yang berlawanan dengan
sumbu x.
Analog dengan cara di atas maka dapat diperoleh :
kNf x 6703 =

66
Mengingat sumbu lokal dan global pada elemen balok memiliki arah yang
sama (α = 0), maka pada elemen balok akan diperoleh f = F dan d = D,
maka :
−
−−−
−
−
−
−
=
2
2
2
1
1
1
22
2323
22
2323
2
2
2
1
1
1
460
260
6120
6120
0000
260
460
6120
6120
0000
θ
θ
y
x
y
x
y
x
y
x
D
D
D
D
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AEL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
AE
L
AE
m
f
f
m
f
f
(5.28)
sehingga untuk nodal 1 :
=
1
1
1
2
23
1
1
1
460
6120
00
θ
y
x
y
x
D
D
L
EI
L
EIL
EI
L
EIL
AE
m
f
f
(5.29)
atau;
−
=
0113,0
0225,0
00338,0
20,010,00
10,0067,00
002
1070 3
1
1
1
x
m
f
f
y
x
−=
mkN
kN
kN
m
f
f
y
x
.0,0
5,26
473
1
1
1
(5.30)
Analog cara di atas untuk nodal 2 :
−
−−
−
=
0113,0
0225,0
00338,0
10,010,00
10,0067,00
002
1070 3
2
2
2
x
m
f
f
y
x

67
−
−
=
mkN
kN
kN
m
f
f
y
x
.3,78
5,25
473
1
1
1
(5.31)
670 kN
670 kN
1
3
y
z
x
26,5 kN
473 kN
2
1 78,3 kN.m
0,0 kN.m
473 kN
26,5 kN




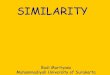

![[DAC61833] ALJABAR LINEARrepository.ung.ac.id/get/kms/17506/Resmawan-Aljabar...[DAC61833] ALJABAR LINEAR Materi Kuliah Aljabar Linear Resmawan JURUSAN MATEMATIKA UNIVERSITAS NEGERI](https://img.pdfslide.net/doc/110x75/5e39ee28badf2b38ab7b0738/dac61833-aljabar-dac61833-aljabar-linear-materi-kuliah-aljabar-linear-resmawan.jpg)