Embed Size (px)
Citation preview
1
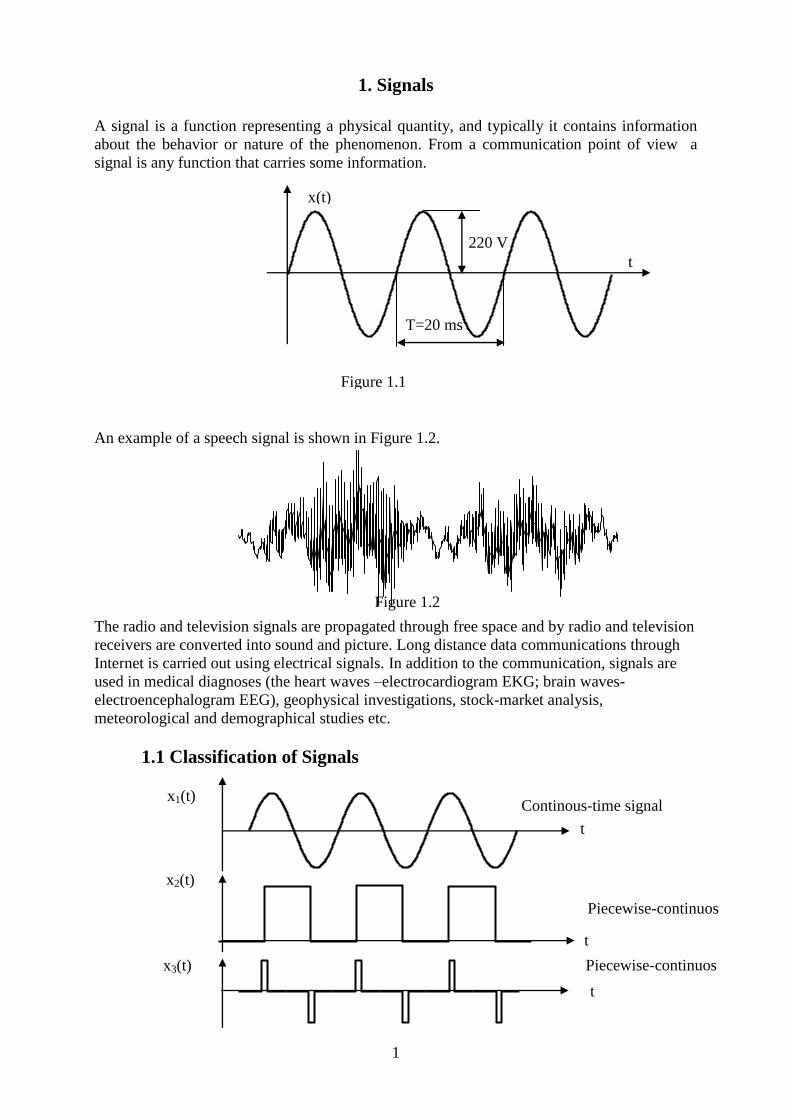
1. Signals
A signal is a function representing a physical quantity, and typically it contains information
about the behavior or nature of the phenomenon. From a communication point of view a
signal is any function that carries some information.
An example of a speech signal is shown in Figure 1.2.
The radio and television signals are propagated through free space and by radio and television
receivers are converted into sound and picture. Long distance data communications through
Internet is carried out using electrical signals. In addition to the communication, signals are
used in medical diagnoses (the heart waves –electrocardiogram EKG; brain waves-
electroencephalogram EEG), geophysical investigations, stock-market analysis,
meteorological and demographical studies etc.
1.1 Classification of Signals
Figure 1.2
220 V
T=20 ms
x(t)
t
Figure 1.1
Continous-time signal
Piecewise-continuos
Piecewise-continuos
x1(t)
x2(t)
x3(t)
t
t
t
2
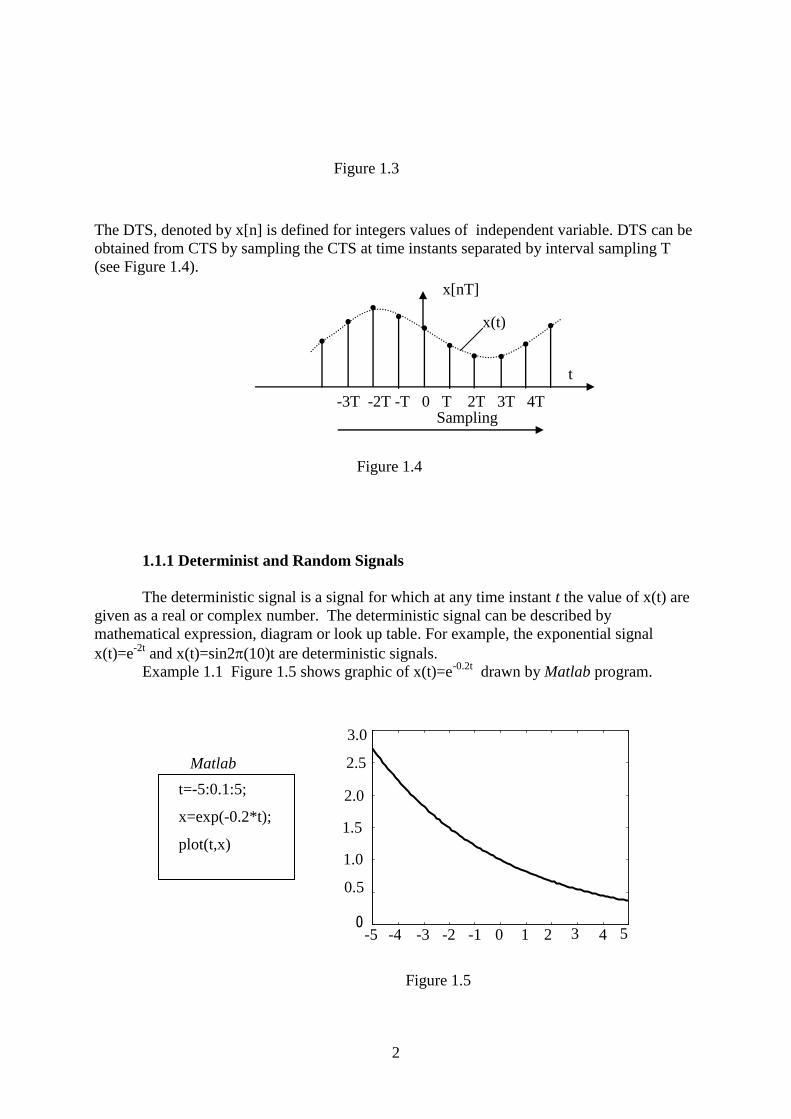
The DTS, denoted by x[n] is defined for integers values of independent variable. DTS can be
obtained from CTS by sampling the CTS at time instants separated by interval sampling T
(see Figure 1.4).
1.1.1 Determinist and Random Signals
The deterministic signal is a signal for which at any time instant t the value of x(t) are
given as a real or complex number. The deterministic signal can be described by
mathematical expression, diagram or look up table. For example, the exponential signal
x(t)=e-2t
and x(t)=sin2(10)t are deterministic signals.
Example 1.1 Figure 1.5 shows graphic of x(t)=e-0.2t
drawn by Matlab program.
Matlab
Figure 1.3
x[nT]
t
-3T -2T -T 0 T 2T 3T 4T
Hr(j) =
a)
Hr(j) = Figure 1.4
x(t)
Sampling
5
3.0
2.5
2.0
1.5
0.5
1.0
0 4 3 2 1 0 -1 -2 -3 -4 -5
t=-5:0.1:5;
x=exp(-0.2*t);
plot(t,x)
Figure 1.5
3
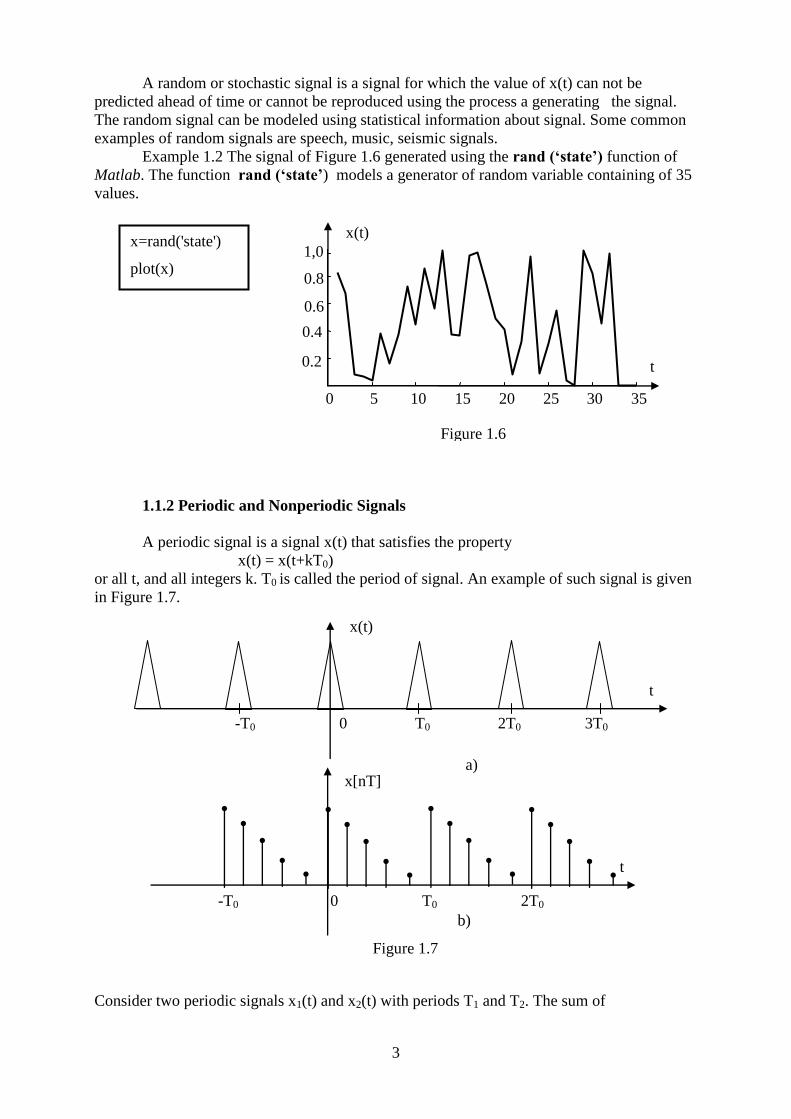
A random or stochastic signal is a signal for which the value of x(t) can not be
predicted ahead of time or cannot be reproduced using the process a generating the signal.
The random signal can be modeled using statistical information about signal. Some common
examples of random signals are speech, music, seismic signals.
Example 1.2 The signal of Figure 1.6 generated using the rand (‘state’) function of
Matlab. The function rand (‘state’) models a generator of random variable containing of 35
values.
1.1.2 Periodic and Nonperiodic Signals
A periodic signal is a signal x(t) that satisfies the property
x(t) = x(t+kT0)
or all t, and all integers k. T0 is called the period of signal. An example of such signal is given
in Figure 1.7.
Consider two periodic signals x1(t) and x2(t) with periods T1 and T2. The sum of
-T0 0 T0 2T0 3T0
x(t)
t
-T0 0 T0 2T0
x[nT]
t
Figure 1.7
a)
b)
x=rand('state')
plot(x)
Figure 1.6
0 5 10 15 20 25 30 35
0.2
0.4
0.6
0.8
1,0
t
x(t)
4
.Ctx
.Rtx
y(t)= x1(t) + x2(t) ay or may not be periodic depending on the relationship between T1 and T2.
If we find two integers n1 and n2 such that (T1/ n1)=(T2/ n2), then x1(t) and x2(t) have a
common period and y(t) will be periodic with period T1 n2=T2 n1. Thus the condition y(t)=
x1(t) + x2(t) to be periodic is that the ratio T1/T2 is a rational number or T1 and T2 have
common divisor.
A signal that does not satisfy the conditions of periodicity is called nonperiodic. An example
of nonperiodic signal is unit step function shown in Figure 1.8.
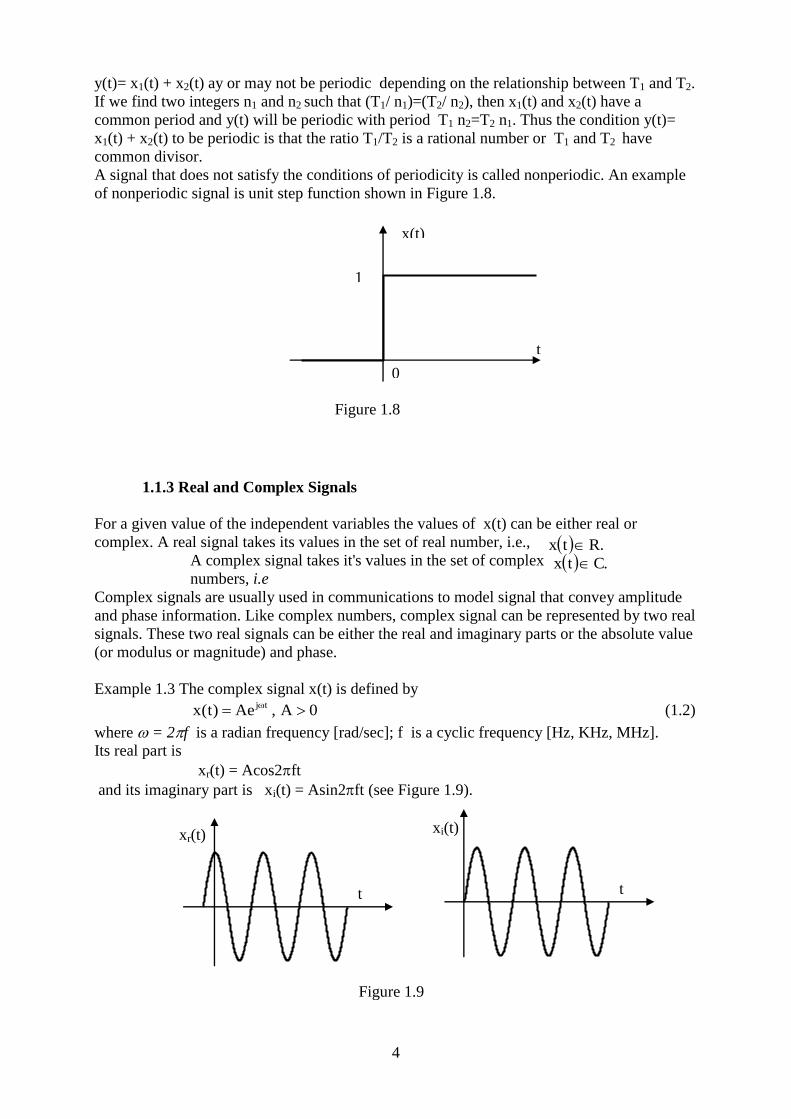
1.1.3 Real and Complex Signals
For a given value of the independent variables the values of x(t) can be either real or
complex. A real signal takes its values in the set of real number, i.e.,
A complex signal takes it's values in the set of complex
numbers, i.e
Complex signals are usually used in communications to model signal that convey amplitude
and phase information. Like complex numbers, complex signal can be represented by two real
signals. These two real signals can be either the real and imaginary parts or the absolute value
(or modulus or magnitude) and phase.
Example 1.3 The complex signal x(t) is defined by
0A,Ae)t(x tj (1.2)
where = 2f is a radian frequency [rad/sec]; f is a cyclic frequency [Hz, KHz, MHz].
Its real part is
xr(t) = Acos2ft
and its imaginary part is xi(t) = Asin2ft (see Figure 1.9).
xr(t)
t
xi(t)
t
Figure 1.9
0
1
t
x(t)
Figure 1.8
5
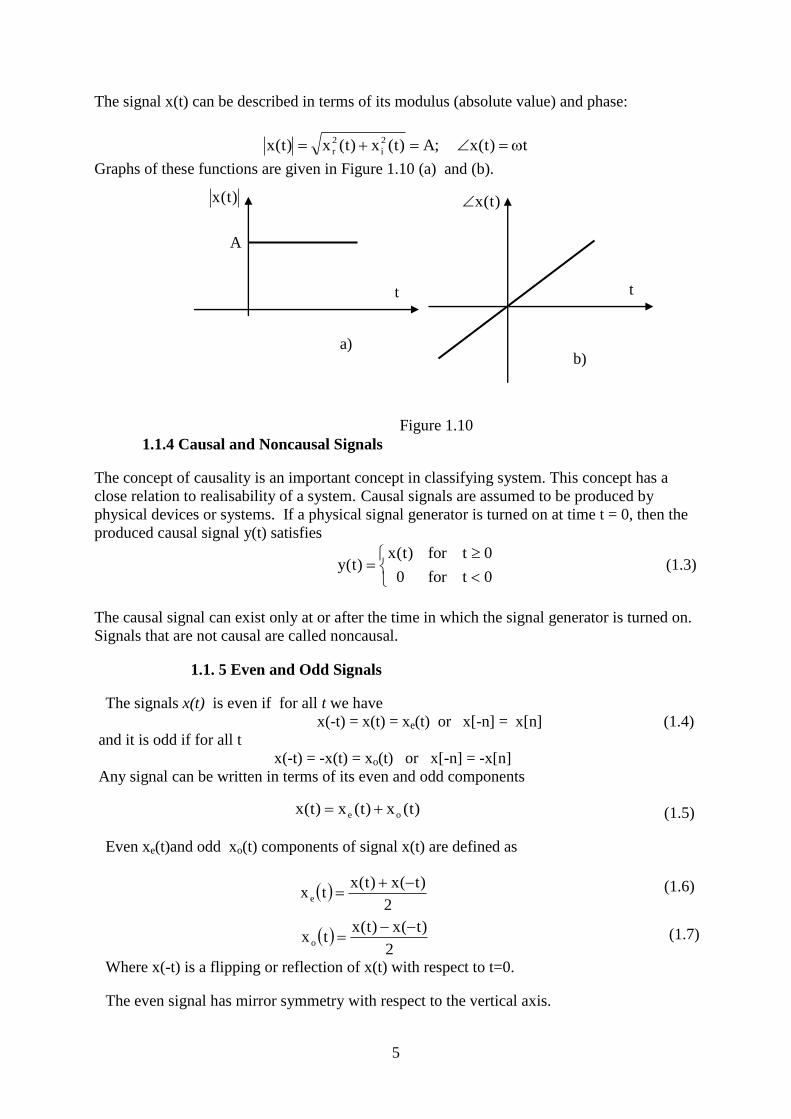
The signal x(t) can be described in terms of its modulus (absolute value) and phase:
t)t(x;A)t(x)t(x)t(x 2
i
2
r
Graphs of these functions are given in Figure 1.10 (a) and (b).
1.1.4 Causal and Noncausal Signals
The concept of causality is an important concept in classifying system. This concept has a
close relation to realisability of a system. Causal signals are assumed to be produced by
physical devices or systems. If a physical signal generator is turned on at time t = 0, then the
produced causal signal y(t) satisfies
0tfor0
0tfor)t(x)t(y (1.3)
The causal signal can exist only at or after the time in which the signal generator is turned on.
Signals that are not causal are called noncausal.
1.1. 5 Even and Odd Signals
The signals x(t) is even if for all t we have
x(-t) = x(t) = xe(t) or x[-n] = x[n] (1.4)
and it is odd if for all t
x(-t) = -x(t) = xo(t) or x[-n] = -x[n]
Any signal can be written in terms of its even and odd components
Even xe(t)and odd xo(t) components of signal x(t) are defined as
Where x(-t) is a flipping or reflection of x(t) with respect to t=0.
The even signal has mirror symmetry with respect to the vertical axis.
2
)t(x)t(xtx e
2
)t(x)t(xtx o
)t(x)t(x)t(x oe
)t(x
t t
A
)t(x
Figure 1.10
a) b)
(1.7)
(1.6)
(1.5)
6
t
x(t)
n
X[n]
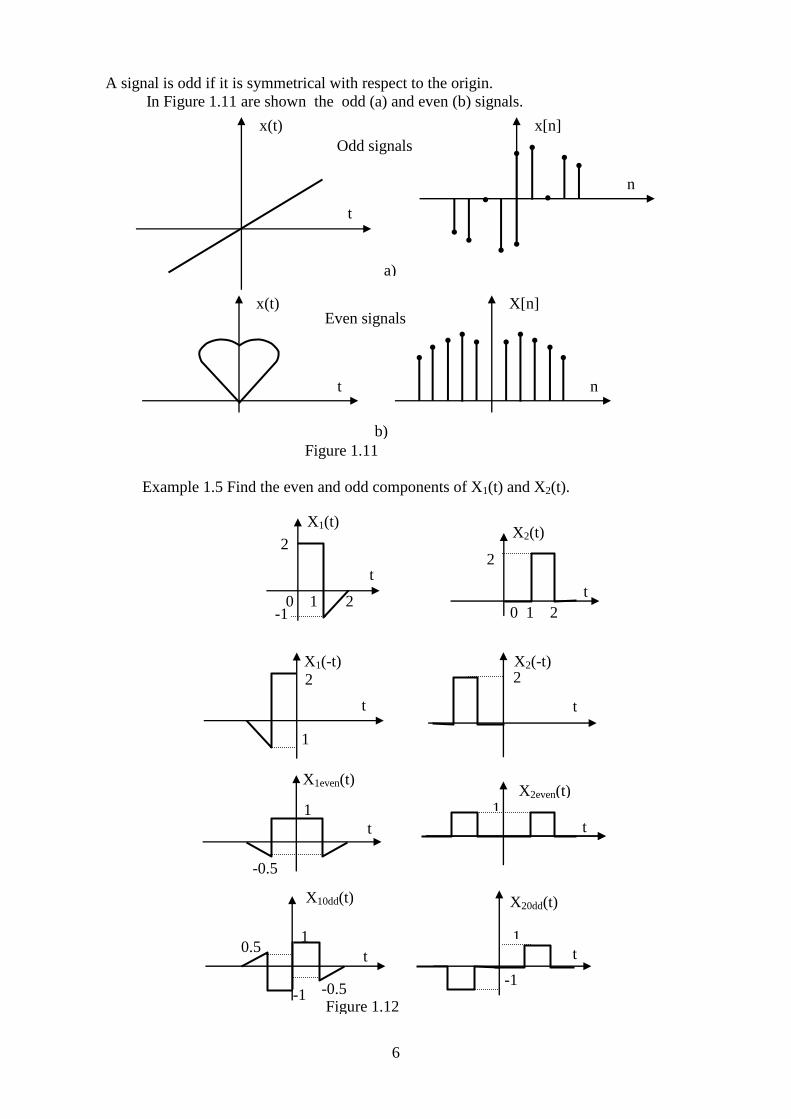
A signal is odd if it is symmetrical with respect to the origin.
In Figure 1.11 are shown the odd (a) and even (b) signals.
Example 1.5 Find the even and odd components of X1(t) and X2(t).
Figure 1.12
Even signals
-1
X2(t)
0 1 2
t
X1(t)
0 1 2
t 2
2
X2even(t) X1even(t)
t t
1 1
-0.5
X2(-t) X1(-t)
t t
2 2
1
X10dd(t) X20dd(t)
t t
-1
1 1
-1 -0.5
0.5
Figure 1.11
b)
t
x(t)
n
x[n]
a)
Odd signals

7
1. 1. 6 Energy and Power types Signals
If v(t) and i(t) are respectively, the voltage and current across a resistor with resistance
R=1 resstor, then the instantaneous power is
The average energy expended over the time interval t1-t2=T
2t t 1t
2t
1t
2
2t
1t
dt)t(vT
1dt)t(p
T
1 =xE
For any signal x(t), the energy Ex is defned as
dt)t(xdt)t(xlimE2
T
T
2
Tx
The power xP of signal is
T
T
2
Tx dt)t(xT
1limP
For real signals )t(x)t(x 22 .
The signal x(t) is energy-type signal if and only if Ex well defined and finite 0<Ex>. For
power-type signals 0<Px>.
1.2 BASIC CONTINUOUS-TIME SIGNALS
In our study of communication systems, certain signals appear frequently. Here we
briefly introduce these signals and give some of their properties.
a) Exponential signal
The continuous time complex exponential signal is of the form
atCe)t(x
(1.10)
where C and a are, in general, real or complex numbers. Depending upon the values of these
parameters, the complex exponential signal can take on several different characteristics.
If C and a are real (in which case x(t) is called a real exponential), there are basically two
types of behavior as shown in Figure1.13
)t(v)t(vR
1ti.tvtp 22
(1.9)
(1.8)
8
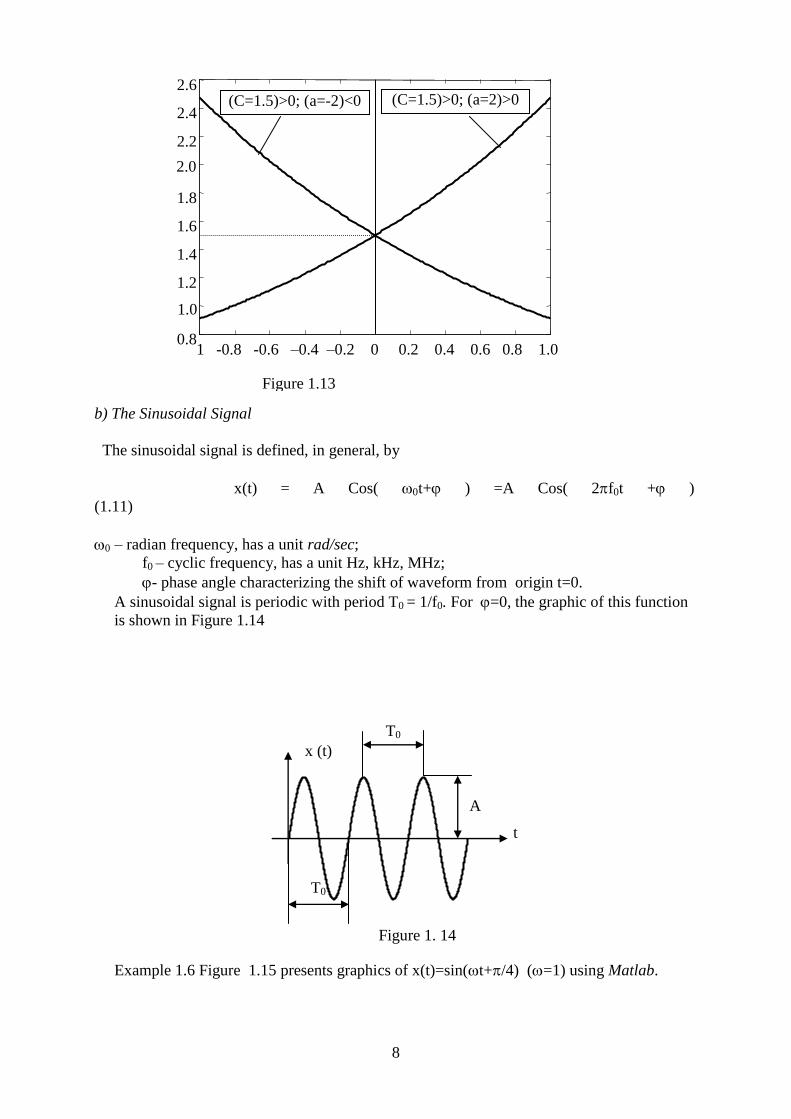
b) The Sinusoidal Signal
The sinusoidal signal is defined, in general, by
x(t) = A Cos( 0t+ ) =A Cos( 2f0t + )
(1.11)
0 – radian frequency, has a unit rad/sec;
f0 – cyclic frequency, has a unit Hz, kHz, MHz;
- phase angle characterizing the shift of waveform from origin t=0.
A sinusoidal signal is periodic with period T0 = 1/f0. For =0, the graphic of this function
is shown in Figure 1.14
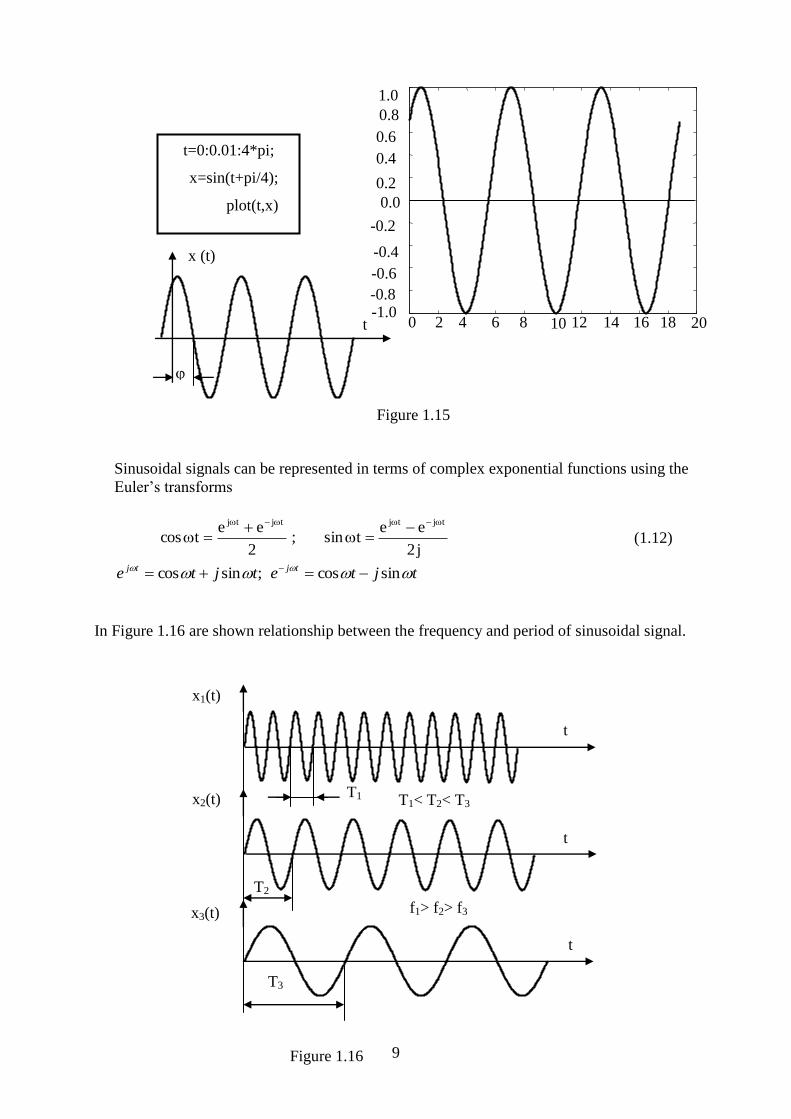
Example 1.6 Figure 1.15 presents graphics of x(t)=sin(t+/4) (=1) using Matlab.
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
2.4
2.6
1 -0.8 -0.6 –0.4 –0.2 0 0.2 0.4 0.6 0.8 1.0
(C=1.5)>0; (a=-2)<0 (C=1.5)>0; (a=2)>0
Figure 1.13
T0
T0
A
x (t)
t
Figure 1. 14
9
Figure 1.15
Sinusoidal signals can be represented in terms of complex exponential functions using the
Euler’s transforms
j2
eetsin;
2
eetcos
tjtjtjtj
tjtetjte tjtj sincos;sincos
In Figure 1.16 are shown relationship between the frequency and period of sinusoidal signal.
t=0:0.01:4*pi;
x=sin(t+pi/4);
plot(t,x)
2 4 6
0.0
-0.6
-0.4
0.2
0.4
0.6
0.8
1.0
-0.2
-0.8 -1.0
8 10
0
12
0
14
0
16
0
18
0 20 0
x (t)
t
x1(t)
x2(t)
x3(t)
T1
T2
T3
t
t
t
T1< T2< T3
f1> f2> f3
Figure 1.16
(1.12)
10
dt
)t(dU)t(
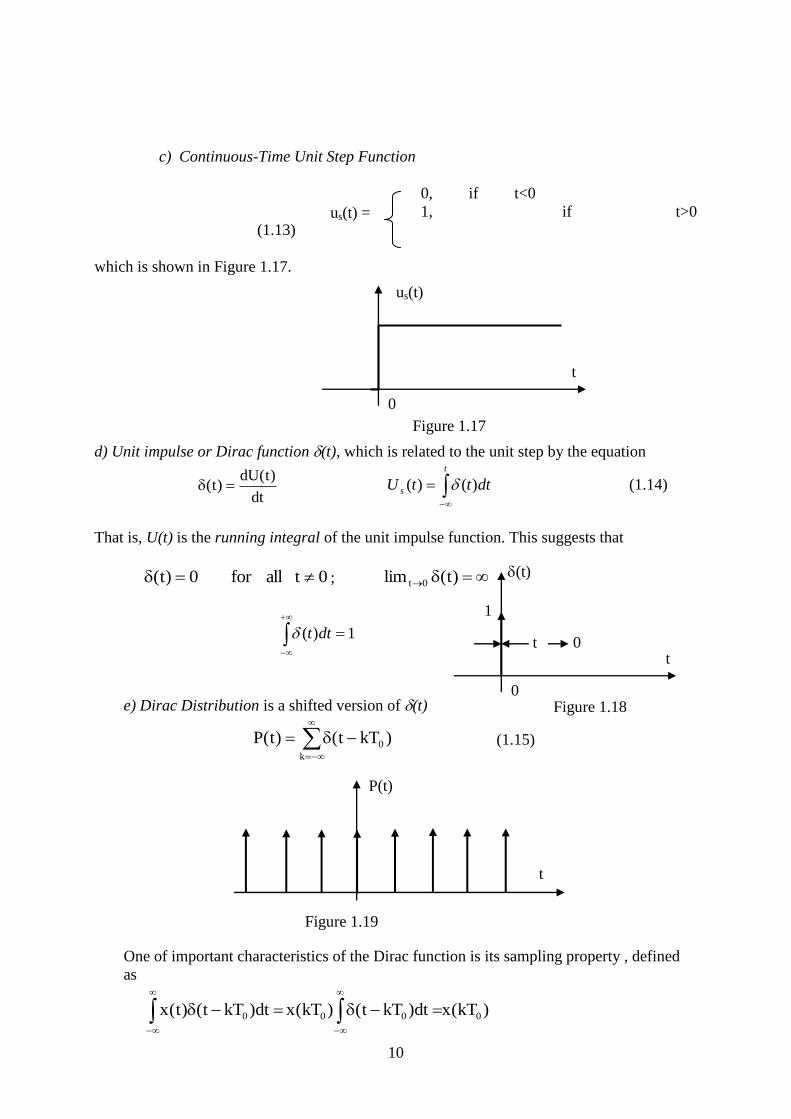
c) Continuous-Time Unit Step Function
0, if t<0
1, if t>0
(1.13)
which is shown in Figure 1.17.
d) Unit impulse or Dirac function (t), which is related to the unit step by the equation
t
s dtttU )()( (1.14)
That is, U(t) is the running integral of the unit impulse function. This suggests that
0tallfor0)t( ; )t(lim 0t
1)(
dtt
e) Dirac Distribution is a shifted version of (t)
k
0 )kTt()t(P (1.15)
One of important characteristics of the Dirac function is its sampling property , defined
as
us(t) =
t
us(t)
0
Figure 1.17
(t)
t
0
1
t 0
Figure 1.18
t
Figure 1.19
P(t)
)kT(xdt)kTt()kT(xdt)kTt()t(x 0000
11
t
0
(t)
=
1 1
1
Figure 1.22
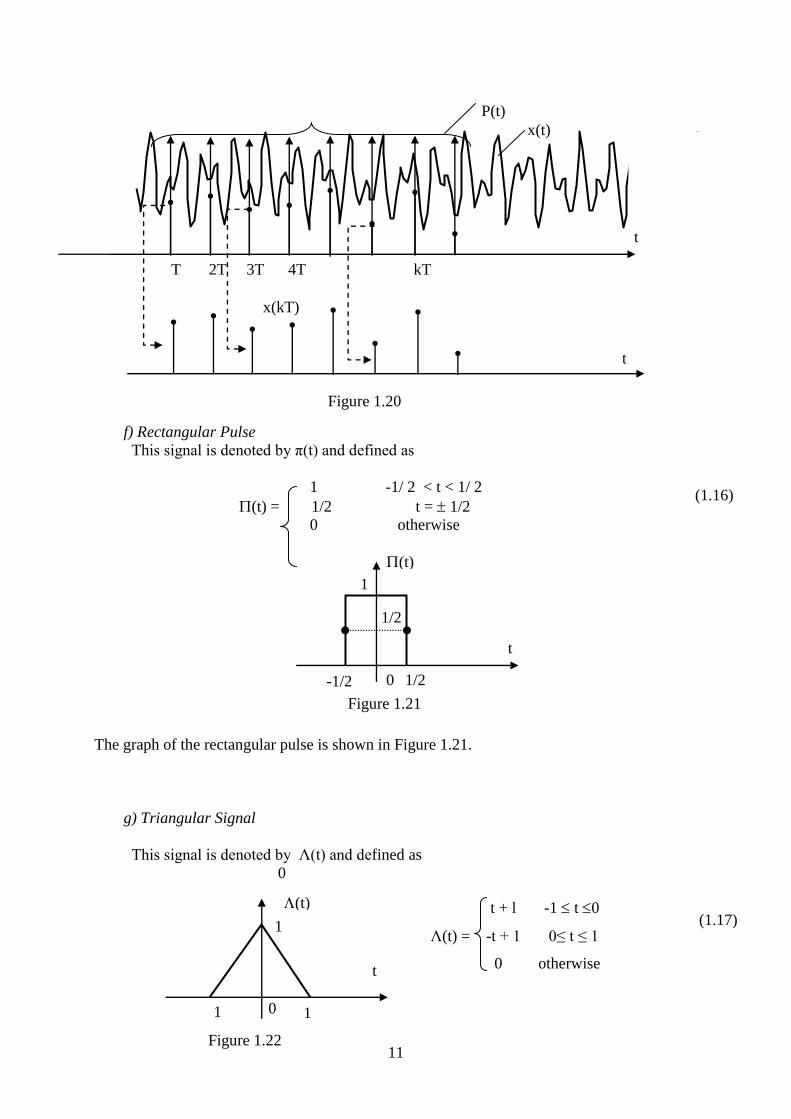
f) Rectangular Pulse
This signal is denoted by π(t) and defined as
1 -1/ 2 < t < 1/ 2
(t) = 1/2 t = 1/2
0 otherwise
The graph of the rectangular pulse is shown in Figure 1.21.
g) Triangular Signal
This signal is denoted by Λ(t) and defined as
0
t
0
(t)
=
-1/2 1/2
1/2
1
P(t)
t
t
x(t)
x(kT)
T 2T 3T 4T kT
Figure 1.20
(1.16)
Figure 1.21
t + l -1 t 0
Λ(t) = -t + 1 0≤ t ≤ 1
0 otherwise
(1.17)
12
-6 -5 -4 -3-2 -1 0 1 2 3 4 5 6
t
Sinc(t) 1
t=-2*pi:0.05:2*pi;
s=sin(pi*t)./(pi*t);
plot(t,x)
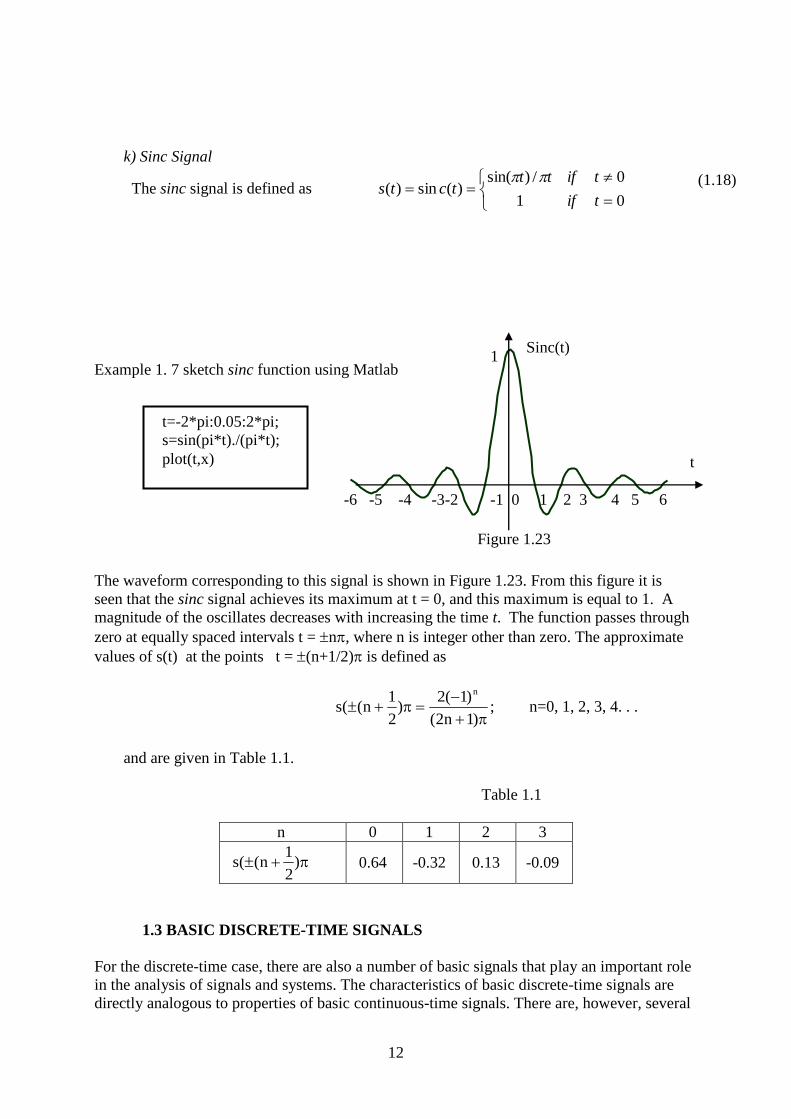
k) Sinc Signal
The sinc signal is defined as
01
0/)sin()(sin)(
tif
tiftttcts
Example 1. 7 sketch sinc function using Matlab
The waveform corresponding to this signal is shown in Figure 1.23. From this figure it is
seen that the sinc signal achieves its maximum at t = 0, and this maximum is equal to 1. A
magnitude of the oscillates decreases with increasing the time t. The function passes through
zero at equally spaced intervals t = n, where n is integer other than zero. The approximate
values of s(t) at the points t = (n+1/2) is defined as
;)1n2(
)1(2)
2
1n((s
n
n=0, 1, 2, 3, 4. . .
and are given in Table 1.1.
Table 1.1
n 0 1 2 3
)2
1n((s 0.64 -0.32 0.13 -0.09
1.3 BASIC DISCRETE-TIME SIGNALS
For the discrete-time case, there are also a number of basic signals that play an important role
in the analysis of signals and systems. The characteristics of basic discrete-time signals are
directly analogous to properties of basic continuous-time signals. There are, however, several
Figure 1.23
(1.18)

13
important differences in discrete time, and we will point these out as we examine the
properties of these signals.
a) Discrete-Time Unit Step and Unit Impulse Sequences
The counterpart of the continuous-time unit-step function is the discrete-time unit step,
denoted by us[n] and defined by
0nif0
0nif1nu s
The unit step sequence is shown in Figure 1.246. As we discussed in Section 2.3, a second
very important continuous-time signal is the unit impulse. In discrete time we define the unit
impulse (or Unit sample) as
0nif0
0nif1n
which is shown in Figure 1.25. Note that unlike its continuous-time counterpart, there are no
analytical difficulties in defining δ[n].
The discrete-time unit sample possesses many properties that closely parallel the
characteristics of the continuous-time unit impulse.
The Continuous-time impulse is formally the first derivative of the continuous-
time unit step, the discrete-time unit impulse is the first difference of the discrete-time step
δ[n]=u[n ]- u[n – 1]
Similarly, while the continuous-time unit step is the running integral of δ(t), the discrete-time
unit step is the running sum of the unit sample
n
s nnu
b) Discrete-Time Sinusoidal Signals
Figure 2.24
Us[n]
0
(1.19)
(1.20)
(1.21)
0
[n]
n
Figure 1.25
1
14
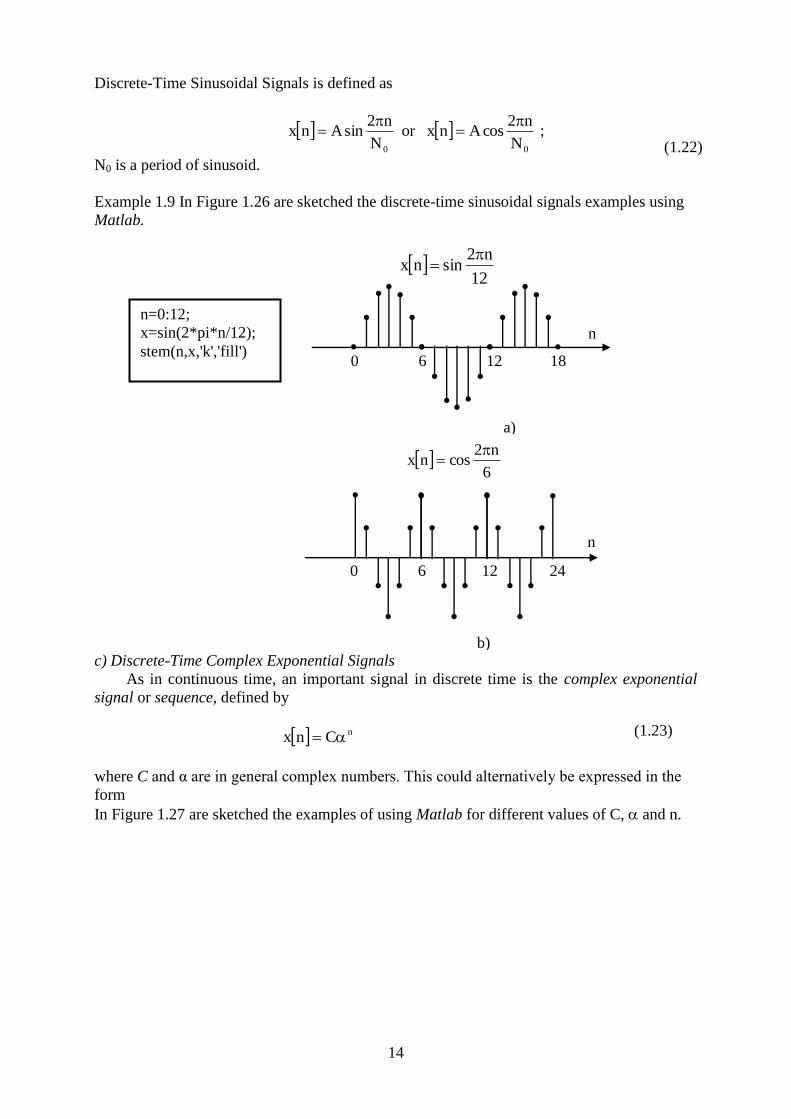
Discrete-Time Sinusoidal Signals is defined as
00 N
n2cosAnxor
N
n2sinAnx
;
N0 is a period of sinusoid.
Example 1.9 In Figure 1.26 are sketched the discrete-time sinusoidal signals examples using
Matlab.
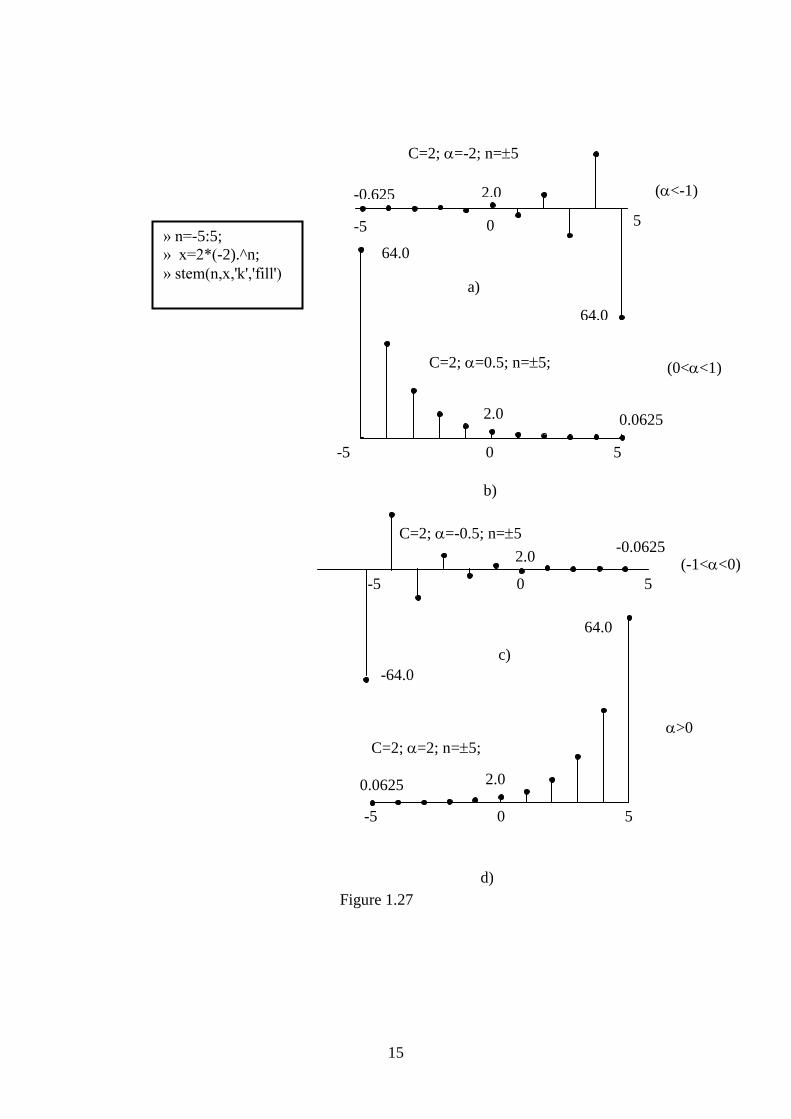
c) Discrete-Time Complex Exponential Signals
As in continuous time, an important signal in discrete time is the complex exponential
signal or sequence, defined by
nCnx
where C and α are in general complex numbers. This could alternatively be expressed in the
form
In Figure 1.27 are sketched the examples of using Matlab for different values of C, and n.
0 6 12 18
n
a)
12
n2sinnx
0 6 12 24
n
b)
6
n2cosnx
n=0:12;
x=sin(2*pi*n/12);
stem(n,x,'k','fill')
(1.22)
(1.23)
15
» n=-5:5;
» x=2*(-2).^n;
» stem(n,x,'k','fill')
C=2; =0.5; n=5;
Figure 1.27
C=2; =2; n=5;
>0
-64.0
-5 0 5
d)
64.0
2.0 0.0625
c)
2.0 -0.0625
-5 0 5
(-1<<0)
-5 0 5
b)
64.0
2.0 0.0625
(0<<1)
0 5 -5
-0.625
64.0
2.0 (<-1)
a)
C=2; =-2; n=5
C=2; =-0.5; n=5





























