-
8/19/2019 2. Crane Models and Geometry
1/28
TRAININGLoader crane
Crane models andgeometry
Original training documentation
2014/01
PALFINGER AGFranz-Wolfram-Scherer-Straße 245020 Salzburg /
Austriawww.palfinger.com
http://www.palfinger.com/http://www.palfinger.com/
-
8/19/2019 2. Crane Models and Geometry
2/28
-
8/19/2019 2. Crane Models and Geometry
3/28
Index Crane models and geometry
3 / 28
Index
1
General...........................................................................................
4 1.1
Introduction and handling of this document
..................................... 4
1.2 Validity
............................................................................................
4
1.3
Symbols in this document
...............................................................
4
2 Crane and fly-jib components
......................................................
5 2.1 Crane components
.........................................................................
5 2.2
Fly-jib components
..........................................................................
6
2.3 Slewing system
...............................................................................
7 2.4
Variants of controlling the crane
...................................................... 8
2.5 Support variants
...........................................................................
10 2.6 Extension system (Hydraulic extensions)
...................................... 11
3 Types of cranes
...........................................................................
13 3.1 LKW-Modelle
................................................................................
13
3.2
Wood-, Recycling-, Clamshell bucket grab cranes
........................ 13 3.3 Marine cranes
...............................................................................
13
3.4
Railway
.........................................................................................
14
3.5 Special applications
......................................................................
14
4 Arm system
.................................................................................
15 4.1
Standard
.......................................................................................
15
4.2 K-models (PKxxxK-models)
..........................................................
15 4.3
Long arm models
..........................................................................
16
5 Load capacity diagram
...............................................................
17
6
Crane moments
...........................................................................
18 6.1 Lifting moment
..............................................................................
18
6.2 Load moment
................................................................................
18 6.3
Own moment
................................................................................
20
6.4 Force on the lifting cylinder:
..........................................................
21 6.5 Classification moment
...................................................................
22 6.6 Load capacity diagrams
................................................................
23
7 Link systems
...............................................................................
24 7.1
Principle
........................................................................................
24
7.2 Advantages of link systems
..........................................................
27 7.3 Single Link System
.......................................................................
27
7.4
Power Link System
.......................................................................
27
7.5 Power Link Plus
............................................................................
28
-
8/19/2019 2. Crane Models and Geometry
4/28
-
8/19/2019 2. Crane Models and Geometry
5/28
Crane and fly-jib components Crane models and geometry
5 / 28
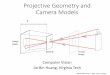
2 Crane and fly-jib components
2.1 Crane components
1. Ground control – control valve side,opposite
side
2. Rigid stabilizer cylinder3. Crane mounting bolts
4. Tiltable stabilizer cylinder
5. Telescopic outrigger beams
6. Base
7. Endless slewing system with gear rim
8. Lift cylinder
9. Emergency operator station on thecrane column
10. Balance
11. Column
12. Linkage system
13. Main boom
14. Rope winch
15. Outer boom lift cylinder
16. Outer boom
17. Extension cylinder for hydraulicextension booms
18. Hydraulic oil tank with oil temperatureindicator and oil
level indicator
19. Extension booms
20. Mechanical extension booms
21. Hook
22. Remote control handset
5
6
14
16
19
3
1
11
1
4
7
9
15
1
8
1
12 13 12
2110 3
18
17
2
20
23 22
-
8/19/2019 2. Crane Models and Geometry
6/28
Crane models and geometry Crane and fly-jib components
6 / 28
2.2 Fly-jib components
1. Insert
2. Linkage system3. Outer boom lift cylinder
4. Outer boom
5. Extension cylinder
6. Hoop guard
7. Hydraulic extension booms
8. Mechanical extension booms
9. Support plate
11
12
3 4
1
51
9
7
8
1
6
-
8/19/2019 2. Crane Models and Geometry
7/28
Crane and fly-jib components Crane models and geometry
7 / 28
2.3 Slewing system
The slewing system of a loader crane is the connection between
the fixed crane base andthe slewable crane column.
Independent on the model, PALFINGER differentiates between two
designs.
2.3.1 Piston rack slewing system
2.3.2 Endless slewing system
The PALFINGER endless slewing system enables unlimited movement
of the crane. Incontrast to a conventional piston rack slewing
system, slewing is done by a hydraulic motor,
as opposed to pistons with a sprocket.
Advantages:
Faster unloading, because the cane can be slewed wherever needed
from anyposition
Safe and smooth crane slewing
Higher slewing moment
Smooth movements without bearing clearance, even after many
years of service
-
8/19/2019 2. Crane Models and Geometry
8/28
Crane models and geometry Crane and fly-jib components
8 / 28
2.4 Variants of controlling the crane
Depending on the model, there are multiple available variants of
controlling the crane.PALFINGER distinguishes between the following
variants.
Modern cranes are controlled via RRC. The “FFST” option can be
selected additionally towith any of the variants below.
2.4.1 Floor control
All cranes with piston rack slewing system and without
high stand are equipped with floorcontrol. The control valve is
mounted on the crane base.
2.4.2 Emergency control on crane column (NK)
Cranes equipped with an endless slewing system are usually
operated by RRC. Because ofthis, the control valve can be mounted
on the crane column. To create a hydraulicconnection between the
pump and the control valve, a hydraulic rotary distributer is built
intothe column.
-
8/19/2019 2. Crane Models and Geometry
9/28
Crane and fly-jib components Crane models and geometry
9 / 28
2.4.3 High stand
Optional to the floor control a high stand can be ordered. The
control valve is mounted onthe crane base.
2.4.4 High seat
Special crane models (e.g. PK27001EK) can be ordered with a high
seat if needed. Thecontrol valve on these cranes is mounted behind
or below the high seat. Actuation is doneeither via control rods or
a hydraulic pilot control.
Optionally a bracket to hold the RRC is available
-
8/19/2019 2. Crane Models and Geometry
10/28
Crane models and geometry Crane and fly-jib components
10 / 28
2.5 Support variants
PALFINGER offers different support variants. They are
distinguished by different ordercodes:
R – Support of normal crane bases
EGG Support of integral bases
Numbers 1-4 – Shows the different outrigger lengths
(stays empty if no stabilizersare equipped)
X – Hydraulically extendable outriggers
Y – Hydraulically tiltable stabilizers
Possible variants:
R
R1
R2
R2X (Y)
R3X (Y)
R4X (Y)
-
8/19/2019 2. Crane Models and Geometry
11/28
Crane and fly-jib components Crane models and geometry
11 / 28
2.6 Extension system (Hydraulic extensions)
PALFINGER loader cranes and fly-jibs can be ordered with varying
amounts of hydraulicextensions
PK92002 SH + PJ170 with the maximum of possible extensions in
this configuration
2.6.1 Crane extensions
Every PALFINGER crane has hat least one hydraulic extension. All
hydraulic extensionsexcept this first one are denoted with a
letter. The first additional extension is called “A”, thesecond “B”
and so on. A maximum of 9 (“H”) additional extensions are possible.
STD
B
D
F
H
-
8/19/2019 2. Crane Models and Geometry
12/28
Crane models and geometry Crane and fly-jib components
12 / 28
2.6.2 Fly-jib extensions
PALFINGER cranes can be equipped with an additional knuckle boom
system called fly-jib.Fly- jibs also can be ordered with
different hydraulic extensions. A maximum of 7 (“F”)extensions is
possible.
2.6.3 Mechanical extensions
If the hydraulic outreach is not enough, the crane or the
fly-jib can be equipped withmechanical extensions.
V1
To include mechanical extensions into the overload protection
system, a pressure switchhas to be mounted.
The set load for the switch is the maximum load of the
mechanical extensions according tothe data sheet..
-
8/19/2019 2. Crane Models and Geometry
13/28
Types of cranes Crane models and geometry
13 / 28
3 Types of cranes
PALFINGER offers different cranes for different areas of
deployment. They are differentiatedlike this:
3.1 LKW-Modelle
PC PALFINGER Compact craneNo knuckle boom. Below 4 mt
PK PALFINGER Knucke boom craneDenotes truck mounted
cranesDifferent versions for each type are possibleBest-selling
modelsSizes from 4 up to 200 mt
PW Wallboard cranes for North America. Internal extension
system
3.2 Wood-, Recycling-, Clamshell bucket grab cranes
CMQSX
PALFINGER EPSILON cranes are classified according to their
powerCompactMiddleMiddle-HeavyHeavyHeavy Duty
3.3 Marine cranes
PKxxM PALFINGER PK crane for marine use
PSxxM Stiff-Boom marine crane based on PK cranes
PSM Stiff-Boom marine crane with its own power pack, endless
slewing system andcable winch
PKM Marine crane based on PK cranes with independent power
pack
PTM Telescope marine crane
PFM Heavy Duty marine crane
-
8/19/2019 2. Crane Models and Geometry
14/28
Crane models and geometry Types of cranes
14 / 28
3.4 Railway
PKR Railway crane
PB4 Bridge inspection unit
PA.. Manlift for various areas of deployment – mainly
railway use
PFD Positioner for contact wires and carrying cables
PR Foldable crane column
3.5 Special applications
Cranes for special applications can vary and differ in
naming.
-
8/19/2019 2. Crane Models and Geometry
15/28
Arm system Crane models and geometry
15 / 28
4 Arm system
4.1 Standard
Normally cranes are equipped with an arm system, that enables
the crane to fold to 2.5mvehicle with. This limits the length of
the main boom, the knuckle boom and the extensions.
4.2 K-models (PKxxxK-models)
K model cranes have the extension systemof a smaller model. This
leads to a higherhook height and saves weight. K cranescannot
however have the maximum ofextensions
-
8/19/2019 2. Crane Models and Geometry
16/28
Crane models and geometry Arm system
16 / 28
4.3 Long arm models
If the crane needs as much outreach as possible and if it does
not have to be folded duringtransport, a long arm model can be
used.
Theses cranes are mainly used in building material transport and
at carpentry shops.
Long arm models are designated with L (long) or EL (extra long)
after the crane designation.
(eg. PK24001 L, PK 27001 EL)
-
8/19/2019 2. Crane Models and Geometry
17/28
Load capacity diagram Crane models and geometry
17 / 28
5 Load capacity diagram
The load capacity of a PALFINGER crane is represented with load
capacity diagrams. Theyshow the maximal lifting force in certain
working positions. Load capacity diagrams can befound in the
operator manual and in the control area of the crane.
Example: Load capacity diagram of the PK12002 EH (with Power
Link system):
-
8/19/2019 2. Crane Models and Geometry
18/28
Crane models and geometry Crane moments
18 / 28
6 Crane moments
6.1 Lifting moment
The lifting moment is the moment that the lifting cylinder has
to generate. It is included in thecrane designation (Example: PK
12002 SH = 12 mt lifting moment).
FZyl = 326 kN = 33,25 tX = 0,406 m (max.)Z = 90°
6.2 Load momentThe load moment is the moment that the load
exerts on the lifting cylinder. The load iscalculated at the bolt.
The standard hook is calculated as a part of the crane and
thusignored for the laod moment. (Moment = force x distance)
-
8/19/2019 2. Crane Models and Geometry
19/28
Crane moments Crane models and geometry
19 / 28
The load moment is dependent on the outreach, because of the
change of the centre ofgravity has to be taken into account. If the
extensions are retracted, the possible loadmoment increases
dramatically.
The amount and weight of the extensions has a negative effect on
the laod moment. Themore extensions, the less the crane can lift
because of its own weight.
-
8/19/2019 2. Crane Models and Geometry
20/28
Crane models and geometry Crane moments
20 / 28
6.3 Own moment
The own moment describes the moment that is exerted by the
cranes own weight. Most ofthis moment is exerted by the arm
system.
What counts toward the cranes own moment:
Hose equipment up to the coupling
Rope winch including guide pulleys
Standard hook
What counts toward the load moment:
Roll head
Load attachment
Rotator, Rotator hook, grappler, manual extensions …
Weighing hook,…
-
8/19/2019 2. Crane Models and Geometry
21/28
Crane moments Crane models and geometry
21 / 28
6.4 Force on the lifting cylinder:
To be able to calculate the lifting moment (load moment and
weight moment) of a crane theforce at the lifting cylinder has to
be known.
Formula: p=F/A
Example:PK 12002-EHPiston diameter = 110 mmMOV 350 bar = 350
kg/cm² = 35 MPa
p = F / A => F= p x A
F = p x A =F = 350 kg/cm² x 95 cm² =F = 33250 kg = 33,25 t = 326
kN
The lifting force of the lifting cylinder of the PK 12002-EH is
equal to a load of 326 kNmeaning 33,25t on the piston.
This force is exerted on the main boom either directly or via a
power link system.
-
8/19/2019 2. Crane Models and Geometry
22/28
Crane models and geometry Crane moments
22 / 28
6.5 Classification moment
The shown arm position shows the position in wich the
classification moment of a crane isdefined.
Main boom in strongest position
Knucke boom horizontal
Extension system with one extension - retracted
Example: PK12002-EH Arm position as shownClassification
moment = Load momentDistance x Load = 3,7m x 3000 kg = 11,1 mt
-
8/19/2019 2. Crane Models and Geometry
23/28
Crane moments Crane models and geometry
23 / 28
6.6 Load capacity diagrams
Load capacity diagrams show the lifting power dependent on the
arm position
Cranes with multiple extensions cannot lift as much as cranes
with less extensions becauseof their own weight. Every extension
variant has its own load capacity diagram
Example: PK12002-EH and PK12002-EH D
-
8/19/2019 2. Crane Models and Geometry
24/28
Crane models and geometry Link systems
24 / 28
7 Link systems
7.1 Principle
The simplest variant of connecting the main boom and the knuckle
boom is connecting themwithout a power link system.
In this case the main cylinder is and the knuckle boom cylinders
are connected directly totheir end points. The disadvantage of this
type is a varying speed and force throughout thearea of
movement.
This results in slanting lines on the load capacity diagram.
The last number of a crane designation shows the amount of
integrated link systems
PK 12000 no link systems
PK 12001 link system between main boom and knuckle boom
PK 12002 two link systems
-
8/19/2019 2. Crane Models and Geometry
25/28
Link systems Crane models and geometry
25 / 28
Connection of the arm systems with link systems is technically
more challenging, it howeverprovides some advantages. The speed and
force is equal over the whole area of movement.
-
8/19/2019 2. Crane Models and Geometry
26/28
Crane models and geometry Link systems
26 / 28
Because of the construction – the distance “a” stays
the same over the whole working areaof the boom system. Because of
that also the load moment stays constant.
M = F Zyl * a = constant
-
8/19/2019 2. Crane Models and Geometry
27/28
Link systems Crane models and geometry
27 / 28
7.2 Advantages of link systems
The maximal load can be lifted vertically. This leads to a
higher outreach withmaximal load. Load curves on the laod diagram
are vertical aswell.
Even with maximum angle on the knuckle boom the crane can still
lift the maximumload.
Simpler operation of the crane because of the constant
speedHigher operating radius of the knucke boom (up to 180°)
Higher loads can be lifted near the crane column
7.3 Single Link System
Cranes with single link system have one link system between the
main boom and theknuckle boom.
7.4 Power Link System
Power link cranes have the single link system and additionally a
link system between thecrane column and the main boom.
-
8/19/2019 2. Crane Models and Geometry
28/28
Crane models and geometry Link systems
7.5 Power Link Plus
Power Link Plus enables the operator the overstretch the knuckle
boom by 15°