Embed Size (px)
Citation preview

MOTION
NEWTON’S LAWS (TAKEN FROM CENTRE OF MASS)
1. Inertia ⇒ An object at rest will remain at rest
⇒ An object in motion will remain in uniform motion
⇒ Unless acted upon by a net unbalanced force
2.
€
F = ma ⇒ Acceleration is directly proportional (and in line with) the net force acting on an object
⇒ Acceleration is indirectly proportional to mass
3. When object A exerts a force on object B, object B exerts an equal and opposite force on object A
NET FORCE Calculated from addition of vectors:
1. 1D: Addition of magnitude 2. 2D: Vectors head-‐to-‐tail or resolution
into two perpendicular components
UNIFORM CIRCULAR MOTION
⇒
€
f =1T,
€
v =2πT or
€
v = 2πrf
⇒ Velocity is tangential to the motion path ⇒ Magnitude of acceleration:
⇒
€
a =v 2
r or
€
a =4π 2rT 2
or
€
a = 4π 2rf 2
⇒ Centripetal acceleration: Acceleration is always toward the centre of the circle
⇒ Velocity and acceleration are NOT constant (always changing)
⇒ Velocity is perpendicular to acceleration ⇒ Net Force MUST be toward the centre of
the circle (centripetal force) to sustain circular motion
Banked Track ⇒ 3 forces:
1. Normal force 2. Weight force 3. Friction force
⇒
€
Fcent = Σ F net =
N +
W
Fcent =mv 2
r= mg tanθ
=v 2
r= g tanθ
⇒ Resolve Normal and Friction forces into vertical and horizontal components
⇒ Sum of vertical components = 0 ⇒ Sum of horizontal components = ma ⇒ Maximum speed: when friction reaches
maximum ⇒ Design speed: when friction = 0,
€
v = gr tanθ , where θ is the banking angle
Vertical Circular Motion ⇒ Object mass m, tension in string, T:
⇒ Highest:
€
T +mg =mv 2
r
⇒ Lowest:
€
T −mg =mv 2
r
PROJECTILE MOTION
⇒ 2D motion under a constant force
(gravity, or weight) ⇒ Horizontal component of velocity vector
remains constant ⇒ Vertical component of velocity vector is
affected by gravity, constant acceleration of g downwards.
⇒ For horizontal component: ⇒
€
a = 0 ,
€
v = u =Vcosθ ,
€
s = ut ⇒ V = speed at angle θ to horiz.
⇒ For vertical component: ⇒ Use rules for rectilinear motion:
€
v = u + ats = 1
2 (u + v)s = ut + 1
2 at2
s = vt − 12 at
2
v 2 = u2 + 2as
⇒
€
u =Vsinθ ,
€
a = −g
MOMENTUM & ENERGY
Impulse ⇒ Impulse = change in momentum:
⇒
€
I = Δp ,
€
FΔt = mv −mu ⇒ Conservation of momentum:
⇒ Total momentum before = total momentum after
⇒
€
m1u1 +m2u2 = m1v1 +m2v2 ⇒ When one object gains momentum, the
other loses momentum by the same amount. (The total remains constant) ⇒
€
Δp2 = −Δp1 ,
€
I2 = −I1
Work ⇒ Work is done by one system on another
system during which the former exerts a force on the latter. (energy transfer)
⇒
€
W = Fs = ΔE
Change in Kinetic Energy ⇒ Results from work done by net force on
an object. ⇒
€
Fs = 12 mv
2 − 12 mu
2 ⇒ When an object moves in a gravitational
field kinetic energy changes to gravitational energy, and vice versa. ⇒ Total energy remains constant
⇒
€
Ek1 +Ug1 = Ek2 +Ug2
Gravitational Potential Energy ⇒ @ the Earth’s surface:
⇒
€
Ug = mgh ⇒
€
ΔUg = mgΔh ⇒
€
ΔUg is given by the area under a force-‐distance, or field-‐distance graph
Spring Energy ⇒ Hooke’s Law: when an object interacts
with a Hookean spring, kinetic energy is changed to elastic potential energy and vice versa. Total energy remains constant. ⇒
€
F = kx ⇒
€
Ek1 +Ue1 = Ek2 +Ue2 ⇒
€
Ue = 12 kx
2 ⇒ Area under force-‐extension graph is
change in elastic potential energy ⇒
€
ΔUe = 12 k(x2)
2 − 12 k(x1)
2
⇒
€
k =YAl
Elastic collision ⇒ Elastic collision:
⇒ Total kinetic energy before and after collision is equal. (Energy is conserved) ⇒ During collision some kinetic
energy is converted to elastic potential energy, and then back again
⇒ Inelastic collision: ⇒ Energy after collision is less than
energy before. (Energy is lost) ⇒ During collision, some kinetic
energy is converted to heat and sound.
Gravitational fields ⇒ Universal gravitational field:
⇒
€
g =GMr 2
⇒ Gravitational force between and two objects:
⇒
€
F =GM1M2
r 2
⇒ Satellite Motion: ⇒
€
a = g
⇒
€
v2
r=GMr 2
or
€
4π 2rT 2 =
GMr 2
⇒ ∴
€
v2r =GM or
€
r 3
T 2 =GM4π 2
ELECTRONICS
GENERAL EQUATIONS ⇒ Power:
⇒
€
P = IV
⇒
€
P =V 2
R
⇒
€
P = I2R ⇒
€
V = IR
⇒
€
E =VIt= Pt
⇒
€
Q = It
RESISTANCE ⇒ The ability of a conductor to resist the
flow of electric current.
Ohm’s Law ⇒ Ohm’s law states that for ohmic
conductors, the resistance stays constant, when voltage and current vary.
⇒
€
V = IR ,
€
R =VI
Resistance in Parallel
⇒
€
1RP
=1R1
+1R2
+1R3
+ ... or
€
RP =1
1R1
+1R2
+1R3
+ ...
⇒
€
RP =VABI
Resistance in Series ⇒
€
RS = R1 + R2 + R3 + ...
⇒
€
RS =VABI
Non-‐ohmic conductors ⇒ Diodes:
⇒ Device used to control current and voltage
⇒ Conducts when forward biased ⇒ Current drops to virtually 0 in
reverse-‐bias ⇒ Thermistors:
⇒ Resistance varies with temperature ⇒ Transducers:
⇒ Change other forms of energy (heat, light, etc.) into electricity and vice versa.
⇒ Photonic Transducers: ⇒ Change light into electricity
and vice versa. ⇒ Light Dependant Resistors
(LDRs): ⇒ Resistance changes with the
intensity of light it is exposed to
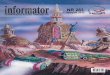
⇒ Photodiodes: ⇒ Conductivity changes with
illuminating light intensity when in reverse-‐bias (photoconductive mode) ⇒ As light intensity
increases, current (photocurrent) increases.
⇒ Forward biased mode is called photovoltaic mode.
⇒ Light Emitting Diodes (LEDs): ⇒ Emits light when forward
biased. Light intensity
increases with increasing forward current.
POWER
⇒
€
Ptotal = ΣP= P1 + P2 + P3 + ...
⇒
€
Ptotal =VABI
⇒
€
Ptotal =VAB
2
Rtotal
⇒
€
Ptotal = I2Rtotal
CURRENT ⇒
POTENTIAL DIFFERENCE/VOLTAGE ⇒ The change in electrical potential
energy between two points.
Voltage Dividers
⇒ A series connection of two or more
resistors forms a voltage divider. The supply voltage
⇒
€
V1V2
=R1R2
⇒
€
Vout =Rout
R1 + R2×Vin
Voltage Amplification ⇒ Voltage gain:
⇒
€
gain =ΔVoutΔVin
⇒ i.e.: gain is gradient of voltage in-‐out graph.
⇒ Negative value for inverting, positive for non-‐inverting.
⇒ If input signal exceeds maximum, clipping occurs.
Clipping
PHOTONICS
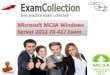
Frequency Modulation
⇒ Modulation:
⇒ Changing the intensity of the carrier light wave to replicate the amplitude variation of the signal wave
⇒ Allows signals that are more robust and able to travel longer distances.
⇒ Demodulation: ⇒ Separation of a signal wave from the
carrier wave.
STRUCTURES AND MATERIALS
FORCES
Tension and Compression ⇒ When a When a structure/material is
pulled at both ends/stretched, it is under tension.
⇒ When a structure/material is pushed at both ends/squashed, it is under compression.
⇒ Compression and tension forces are taken overall, i.e.: a material of non-‐uniform cross-‐sectional area experiences uniform compression and tension.
⇒ Compression and tension can coexist in a structure.
Shear ⇒ Where two opposing parallel forces in
the same plane are applied to opposite sides of a structure/material, or, when two opposing rotational forces in the same plane are applied to a structure/material, it is experiencing a shear force.
EFFECTS OF FORCES/ENERGY
Stress, Strain and Young’s Modulus ⇒ Stress is experienced by any material
subjected to a force. Because stress is inversely proportional to cross-‐sectional area, thinner materials experience more stress (and ∴ more likely to fail)
⇒
€
σ =FA
⇒
€
σ ∝1A,
€
σ ∝ F
0 2.5 5 7.5 10 12.5 15
-2.5
2.5
carrier wave
output wave
signal wave
-3 -2 -1 0 1 2 3
-3
-2
-1
1
2
3
General Diagrams
Voltage Dividers
Signal Modulation
Voltage Amplification in-out graph
General Diagrams
Projectile Motion
General Diagrams

⇒ Strain is the relative (fractional/percentage) change in length of a material under stress.
⇒
€
ε =Δll
⇒ Young’s Modulus is unique to the material. ⇒ It is the linear relationship between
stress and strain in a material. ⇒ It is a measure of “stiffness” of a
material ⇒ In diagrams, A is stiffer than B
⇒ It is given by the gradient of a stress-‐strain graph.
⇒
€
Y =σε
Elasticity ⇒ An elastic material has the same stress
strain graph (Y value) when stress is applied or removed
⇒ When stress is removed, the material returns to its original shape. This is elastic behaviour
⇒ The elastic region of the stress-‐strain graph is linear, and is followed by the plastic region.
⇒ When the elastic limit is reached, however, the material begins to exhibit plastic behaviour, and is permanently deformed (plastic deformation)
⇒ If stress is applied beyond the elastic limit, the material will eventually reach its breaking point, where it will fail (break)
Strength ⇒ The maximum stress (compressive or
tensile) a material can withstand before failing is its compressive/tensile strength
⇒ Strain energy is the amount of potential energy stored in material under stress. It is given by the area under the force-‐extension graph. Also given by multiplying the area under the stress-‐strain graph by the volume of the material ⇒
€
Eσ (J) =Vol (m3) × Aσ -ε
MATERIAL PROPERTIES
Brittle/Ductile ⇒ If a material fails in the elastic region, or
just past the elastic limit, it is called brittle (e.g.: glass, ceramics)
⇒ If a material fails after exhibiting (significant) plastic behaviour, it is ductile (e.g.: aluminium, steel)
Toughness ⇒ Tough material is ductile and absorbs
large amounts of strain energy before failing (e.g.: polyethylene)
⇒ Total area under stress-‐strain graph gives a good indication of toughness.
Composite Materials ⇒ Composite materials are made from two
or more component materials that can be mechanically separated (i.e.: are not blended—like alloys) ⇒ e.g.: clay added straw
⇒ Concrete is weakest under tension, but strong under compression (because of small cracks) ⇒ It can be strengthened by adding
steel (which is weakest under
compression and stronger under tension) rods or mesh during pouring.
⇒ This concrete is called reinforced concrete
⇒ Pre-stressed concrete is where (textured—for grip) steel rods are under tension while the concrete is poured around them. ⇒ When the concrete is set, the
rods are released ⇒ ∴ the concrete is under
compression (it strongest state) and the steel is under tension (its strongest state)
⇒ The same outcome is achieved in post-stressed concrete where smooth steel rods are inserted after pouring, and anchored at the ends.
Safety and Use ⇒ For safety, structures should be built to
withstand a load many times greater than its maximum design capacity.
⇒ The number of times greater load than design is called the factor of safety
⇒ Generally, the factor of safety is between 3 and 10
⇒
€
FoSbrittle =tensile/compressive strength
average stress
⇒
€
FoSductile =elastic limit
average stress
Some Materials
Material Density (gcm-‐3)
Y (GPa)
Elastic limit (MPa)
Tensile strength (MPa)
Cast iron 8 -‐ 200 200
Steel 8 200 450 600
Aluminium alloy 3 80 240 300
Concrete 4 18 4 4
Glass 4 70 100 100
Wood (pine) 0.5 15 35 40
Polyethylene 1 2 25 35
⇒ Cast iron:
⇒ For building iron arch bridges or similar.
⇒ Steel: ⇒ For structures such as buildings that
should not change shape under stress (wind stress, weight stress)
⇒ Aluminium alloy: ⇒ For window and door frames
⇒ Concrete: ⇒ For slabs and panels in buildings
⇒ Glass: ⇒ For windows, doors and enclosures
⇒ Wood: ⇒ For house frames
TORQUE
⇒ Has a turning/rotational effect on a structure.
⇒ Product of force (F) on a structure and perpendicular distance (r) from any given point.
Application of Torque 1. Take the clockwise forces about a point
and multiply them by the distance from said point.
2. Do the same for counter-‐clockwise forces
3. Add the clockwise and counter-‐clockwise forces together for
€
Στ
EQUILIBRIUM
Translational Equilibrium ⇒ Where the forces acting on a structure
add up to 0 ⇒ Body can be in motion, or rotating, but
net force is zero (Newton’s 1st Law) ⇒
€
ΣF = 0 ,
€
Fnet = 0
Rotational Equilibrium ⇒ Where the torques around every point
add up to 0 ⇒ Body can be in motion or accelerating,
but not under torques ⇒
€
Στ = 0 ⇒
€
Στ clockwise = Στ anti-clockwise
Static Equilibrium ⇒ Where body is under BOTH
translational AND rotational equilibrium
⇒ Where both the sum of the forces AND the sum of the torques on a body BOTH equal 0
⇒ Body can be in motion but cannot be accelerating and cannot be rotating
⇒
€
ΣF = 0Στ = 0
Weight and Apparent Weight ⇒ Weight, Fg or W, is the gravitational force
that acts on an object and is measured in newtons. The weight of an object changes as the gravitational field strength changes.
⇒ True weightlessness occurs when the gravitational field strength is negligible. This is possible in deep space far away from the gravitational attraction of stars and planets.
⇒ The apparent weight of a person is equal in magnitude to the normal force, FN or N, that the supporting surface exerts on them.
⇒ The apparent weight of an object changes if it moves with some vertical acceleration.
⇒ A person will be in a state of apparent weightlessness when in free-‐fall and moving with an acceleration equal to the gravitational field strength at their location. The person will experience zero normal force at this time.
Photodiodes WHEN IN THE EXAM
TIME:
Reading Time: 1. Read through Short Answer 2. Categorise:
-‐ Can do/easy -‐ Should be able to do -‐ Don’t know how to do
3. Should do ALL of first 4. Should do MOST of second 5. Should do SOME of third
Writing Time: 1. Start with a
diagram/graph/circuit/sketch 2. Make explanations as a series of dot
points 3. Quote key formulae wherever
possible 4. Give numerical values of quantities
wherever possible (define pronumerals)
REMEMBER: LEAVE NO MULTIPLE CHOICE UNANSWERED Try to leave no question unanswered.
–1 0
–5
+5
–10
–15
–20
–25
–30
–2–3–4–5–6–7–8–9–10
powerarea
No light(dark current nA)
= 1 W m–2
= 2 W m–2
= 3 W m–2
= 4 W m–2
= 5 W m–2
= intensity =
Increasing light intensity
PhotocurrentIph ( A)
Diode voltageVd (V)
Photovoltaicmode
Photoconductive mode(reverse-biased region)
Torque Diagrams