Embed Size (px)
Citation preview

Ž .Journal of Algorithms 32, 31]40 1999Article ID jagm.1999.1007, available online at http:rrwww.idealibrary.com on
A 3-Approximation Algorithm for Finding Optimum4,5-Vertex-Connected Spanning Subgraphs
Yefim Dinitz1
Department of Mathematics and Computer Science, Ben Gurion Uni ersity of Nege ,Beer-She¨a 84105, IsraelE-mail: [email protected]
and
Zeev Nutov 2
Max-Planck-Institut fur Informatik, Im Stadtwald, 66123 Saarbrucken, Germany¨ ¨E-mail: [email protected]
Received August 8, 1996; revised January 11, 1999
The problem of finding a minimum weight k-vertex connected spanning sub-Ž .graph in a graph G s V, E is considered. For k G 2, this problem is known to be
NP-hard. Based on the paper of Auletta, Dinitz, Nutov, and Parente in this issue,� 4we derive a 3-approximation algorithm for k g 4, 5 . This improves the best
1 17previously known approximation ratios 4 and 4 , respectively. The complexity of6 30Ž < < 5. Ž < < 4 < <.the suggested algorithm is O V for the deterministic and O V log V for the
randomized version. The way of solution is as follows. Analyzing a subgraphconstructed by the algorithm of the aforementioned paper, we prove that all its‘‘small’’ cuts have exactly two sides and separate a certain fixed pair of vertices.
Ž .Such a subgraph is augmented to a k-connected one optimally by at most fourexecutions of a min-cost k-flow algorithm. Q 1999 Academic Press
1. INTRODUCTION
Ž w x.In this paper we consider the following problem for motivation see 1 :
MINIMUM WEIGHT k-CONNECTED SUBGRAPH PROBLEM. Given an in-teger k and a k-connected graph with a nonnegative weight function on itsedges, find its minimum weight k-vertex-connected spanning subgraph.
1 Corresponding author.2 This work was done as a part of the author’s D.Sc. thesis at the Dept. of Mathematics,
Technion, Haifa, Israel.
31
0196-6774r99 $30.00Copyright Q 1999 by Academic Press
All rights of reproduction in any form reserved.

DINITZ AND NUTOV32
The case k s 1 is reduced to the problem of finding a minimum weightspanning tree. Beginning from k s 2, the minimum weight k-connected
Žsubgraph problem is known to be NP-hard. To see this, notice that aŽ . < <2-connected spanning subgraph of a graph G s V, E has V edges if and
only if G has a Hamiltonian cycle. A generalization to the case of anyk ) 2 is rather easy; let us add to such a G, k y 2 new vertices, eachconnected to all vertices in the graph by edges of weight zero, arriving at
.an equivalent instance of a k-connected spanning subgraph problem.An approximation algorithm is called a-approximation, or it is said to
achieve an approximation ratio a if it is a polynomial time algorithm thatproduces a solution of weight no more than a times the value of anoptimal solution. For an arbitrary k, the best known approximation algo-
w xrithm is due to Ravi and Williamson 12 ; it achieves the approximation1Ž . Ž .ratio 2 H k , where H k s 1 q q ??? q1rk is the kth harmonic num-2
ber. For a general instance of the minimum weight k-connected subgraphproblem, better approximation ratios were obtained only for k s 2, 3; see
w x w x Ž2-approximation algorithms for k s 2 in 11, 1 and for k s 3 in 1 for aw x.review see 1 .
The main result of this paper is a 3-approximation algorithm for theminimum weight 4- and 5-connected subgraph problems. This improves
1 17 w xthe best previously known performance guarantees 4 , 4 12 , respec-6 30
tively.The main subroutine of our algorithm is ‘‘Out-Connected Subgraph
w x � 4Algorithm,’’ abbreviated OCSA, of 1 . For k g 4, 5 , OCSA finds aŽ .subgraph which is k y 1 -connected and whose weight is at most twice the
value of an optimal solution to the problem. Our algorithm finds anadditional set of edges to be added to this subgraph to make the resultingsubgraph k-connected. We show that in the subgraph computed by OCSAthere exist two vertices such that all ‘‘small’’ cuts separate one of them
Žfrom the other and have exactly two sides such a property was also used inw x w x .9 for k s 3 and in 2 for k s 4 . This property enables us to find anoptimal set of edges to be added by at most four executions of a min-costk-flow algorithm.
In addition, a faster randomized version ROCSA of OCSA is suggested.Ž 2 2 . Ž 2 4 .Its time complexity is O k n m log n s O k n log n , where n is the
number of vertices and m is the number of edges in the input graph; this isby factor nrlog n better than the complexity of OCSA. We note thatROCSA is a randomized approximation algorithm for our problem for thecases k s 2, 3. It has the same approximation ratio 2 as the best previously
Žw x .known algorithms for k s 2, 3 11, 1 , respectively , but its time complexityŽ 2 . Ž 4 . Ž 3 . Ž 5.O n m log n s O n log n is better than O n m s O n , achieved by
those algorithms.

4,5-VERTEX-CONNECTED SUBGRAPHS 33
The complexity of the algorithm suggested for cases k s 4, 5 is the sameŽ 5.as the complexity of OCSA and ROCSA: O n for the deterministic and
Ž 4 .O n log n for the randomized versions.w xAuletta and Parente 2 obtained independently a 3-approximation algo-
rithm for the case k s 4. However, we use additional ideas which lead to amuch simpler analysis and algorithm for k s 4 and enable us to derive a3-approximation algorithm for k s 5.
w x w xRecently, in 8 , it was shown that the algorithms of 1 and of this paperw xcan be combined with the algorithm of 12 to achieve a slightly better
Ž .approximation guarantee than 2 H k for all k.This paper is organized as follows. In Section 2 we give notations and
describe known results used in the paper. Section 3 presents the random-ized algorithm ROCSA. Section 4 presents an analysis of 4- and 5-out-con-nected graphs and introduces our 3-approximation algorithm for theminimum weight 4- and 5-connected subgraph problems.
w xThe preliminary version of this paper is a part of 3 .
2. PRELIMINARIES AND NOTATIONS
Ž . ŽLet G s V, E be an undirected simple graph i.e., without loops and.multiple edges with vertex set V and edge set E. For S, T ; V we denote
Ž .by E S, T the set of edges with one end in S and the other end in T. ForŽ .a vertex ¨ of a graph G we denote by N ¨ the set of neighbors of ¨ inG
Ž . < Ž . <G, and by d ¨ s N ¨ the degree of ¨ in G. In the case G isG Gunderstood, we omit the subscript ‘‘G’’ in these notations.
Ž .A graph G with a nonnegative weight cost function w on its edges isŽ .referred to as a weighted graph and is denoted by G, w , or simply by G if
w is understood. For a weight function w and E9 : E, we use the notationŽ . � Ž . 4 Ž .w E9 s Ý w e : e g E9 . For a subgraph G9 s V 9, E9 of a weighted
Ž . Ž . Ž . Ž .graph G, w , w G9 is defined to be w E9 . A subgraph G9 s V 9, E9 iscalled spanning if V 9 s V; in this paper, we use only spanning subgraphsand, thus, sometimes omit the word ‘‘spanning.’’ Similar notations are usedfor digraphs.
Ž .A subset C : V is a ¨ertex cut of a connected graph G if G R C is< <disconnected; if C s k then such C is called a k-cut. A side of a cut C is
the vertex set of a connected component of G R C. Given a cut C and twononempty disjoint subsets S, T ; V R C, we say that C separates S from Tif G R C contains no path with one end in S and the other end in T.
� 4Clearly, if C is a cut and C, S, T is a partition of V, then C separates SŽ .from T if and only if E S, T s B. A cut that separates a vertex s from a
� 4 � 4 � 4vertex t is called an s, t -cut. An s, t -cut C is called an s, t -minimum� 4cut if C has the minimum cardinality among all s, t -cuts. A graph G is

DINITZ AND NUTOV34
k-connected if it is a complete graph on k q 1 vertices or if it has at leastk q 2 vertices and contains no l-cut with l - k. The connecti ity of G,
Ž .denoted by k G , is defined to be the maximum k for which G is< < Ž .k-connected. In what follows we assume that V G k q 2; thus k G is the
cardinality of a minimum cut of G.A set of paths is said to be internally disjoint if no two of them have an
w x Ž .internal vertex in common. Following 4 , a graph resp., digraph such thatthere exist k internally disjoint paths from a certain vertex r to any itsother vertex is said to be k-out-connected from r. Using Menger’s theorem,it is not hard to see that in a graph which is k-out-connected from r, anyl-cut with l - k, if such exists, must contain r.
Ž .A graph G is called minimally k-connected if k G s k, but for anyŽ .e g E, k G R e - k. Observe that among the subgraphs which are opti-
mal solutions for the minimum weight k-connected subgraph problem,there always exists a minimally k-connected one.
Ž .The underlying graph of a digraph D is the simple graph U D obtainedfrom D by replacing, for every u, ¨ g V, the set of arcs with endnodes
Ž .u, ¨ , if nonempty, by an edge u, ¨ . The directed ¨ersion of a weightedŽ . Ž .graph G, w is the weighted digraph D G obtained from G by replacing
every undirected edge of G by the two antiparallel directed edges with thesame ends and of the same weight. For simplicity of notation, we denote
Ž .the weight function of D G also by w.Ž .Throughout the paper, let GG s GG, w denote the input graph, let n and
m denote the numbers of its vertices and edges, respectively, and let w*denote the value of an optimal solution to our problem.
3. RANDOMIZED OUT-CONNECTED SUBGRAPHALGORITHM
w xThe algorithm OCSA 1 , finds a spanning subgraph of weight at most3 w2w* which is k-out-connected from a vertex of degree k. By 1, Corollary
x Ž . � 43.2 , such a subgraph is kr2 q 1 -connected; in particular, if k g 2, 3u v� 4 Ž .then it is k-connected and if k g 4, 5 then it is k-1 -connected. The time
Ž 2 3 .complexity of OCSA is O k n m . Here we suggest a randomized versionŽ . Ž 2 2ROCSA of OCSA of Monte-Carlo type with the complexity O k n m
.log n .Let us describe OCSA briefly. The following auxiliary problem is consid-
Ž .ered. Let DD, w be a weighted digraph and let r be its vertex; among allk-out-connected from r subdigraphs of DD such that r has outdegree k in
w xthem, if such exist, find one of the minimal weight. In 1 , this problem is
3 Here and further we mean the degree w.r.t. the subgraph.

4,5-VERTEX-CONNECTED SUBGRAPHS 35
reduced to the problem of finding an optimal k-out-connected from rsubdigraph in DD, where large penalties are added to the weights of edgesincident to r. The latter problem can be solved by a single run of the
w x Ž 2 2 .algorithm 5 in O k n m time.Ž .For any input GG, w and k, OCSA:
Ž .1. Constructs the directed version DD s D GG of GG.Ž .2. For every vertex r of D GG , finds a solution D to the abover
auxiliary problem.˜ Ž .3. Maintains the cheapest graph G with the corresponding vertex r
among the underlying graphs of the subdigraphs D ; at the end of ther˜algorithm, G, r are output.˜
We define a randomized algorithm ROCSA as a modification of OCSAŽ .by setting that i the sequence of examined vertices r is chosen at random
˜Ž .and ii the algorithm ends and G, r are output after the examination of˜log n first vertices.3r2
Let us analyze the output of ROCSA. Let G* be any optimal minimallyw xk-connected spanning subgraph. According to the analysis of OCSA in 1 ,
˜ Ž .G becomes a kr2 q 1 -connected subgraph of GG of weight at most 2w*u vw xat least as soon as a vertex with degree k in G* is examined. Mader 7
shows that, for k G 2, any minimally k-connected graph with n vertices1ŽŽ . . Ž .has at least k y 1 n q 2 r 2k y 1 ) n vertices of degree k. This3
implies that with probability 1 y 1rn at least one of the log n vertices3r2examined in ROCSA has degree k in G*. We arrive at the followingstatement.
THEOREM 3.1. For any integer k G 2 and any weighted k-connected graphGG, with probability 1 y 1rn, the output of ROCSA is a spanning subgraph of
ŽGG which is k-out-connected from a ¨ertex of degree k, and hence is kr2 qu v.1 -connected, and whose weight is at most 2w*. The time complexity of
Ž 2 2 .ROCSA is O k n m log n .
As a consequence, we obtain
� 4COROLLARY 3.2. For k g 2, 3 , ROCSA is a randomized 2-approxima-tion algorithm for the minimum weight k-connected subgraph problem, with
Ž 2 . Ž 4 .the time complexity O n m log n s O n log n .
4. MINIMUM WEIGHT 4- AND 5-CONNECTEDSUBGRAPH PROBLEMS
In this section we present a 3-approximation algorithm for the minimumweight 4- and 5-connected subgraph problems. The idea is to execute
Ž .OCSA as the first phase, which produces a k y 1 -connected subgraph,

DINITZ AND NUTOV36
and in the second phase, to augment this subgraph by an appropriate set of� 4edges. Such a set of edges is found as follows. We show that, for k g 4, 5 ,
˜the subgraph G produced by OCSA contains certain two vertices such thatŽ .each its k y 1 -cut separates one of them from the other. We ‘‘destroy’’
˜ ˜Ž .all k y 1 -cuts of G by adding an edge set F of edges, such that G j Fcontains k internally disjoint paths between these two vertices; such anoptimal edge set F is found by using a minimum cost k-flow algorithm. Weneed several preliminary statements.
w xLEMMA 4.1 1 . Let G be a k-out-connected graph from a ¨ertex r, and letC be an l-cut of G with l - k. Then r g C, and for e¨ery side S of C holds:
< Ž . < Ž .l G k y S l N r q 1. Thus k G G k y d r r2 q 1. In particular, ifŽ .Ž . Ž .d r s k then G is kr2 q 1 -connected.u v
< Ž . <Let S be a side of an l-cut of G, l - k. Then, by Lemma 4.1, S l N rGG k y l q 1 G 2. Thus Lemma 4.1 implies the following statement.
COROLLARY 4.2. Let G be a k-out-connected graph from a ¨ertex r of� 4 Ž . Ž .degree k, k g 4, 5 . Then G is k y 1 -connected, and for e¨ery k y 1 -cut
C of G holds:
Ž .i C has exactly two sides;Ž . < Ž . <ii if k s 4 then C l N r s 0 and each side of C contains exactly
Ž .two ¨ertices from N r ;Ž . < Ž . <iii if k s 5 then C l N r F 1 and each side of C contains two or
Ž .three ¨ertices from N r ; thus, at least one side contains exactly two ¨erticesŽ .from N r .
ŽThe following fact is well known its proof is presented here for.completeness of exposition .
� 4LEMMA 4.3. Let C, C9 be two s, t -minimum cuts of a graph G such thateach of C and C9 has exactly two sides, say S, T and S9, T 9, respecti ely,
Ž . Ž .where s g S, S9 and t g T , T 9. Then R s C j C9 R T j T 9 separatessŽ . Ž .S l S9 from T j T 9, R s C j C9 R S j S9 separates T l T 9 fromt� 4S j S9, and both R , R are s, t -minimum cuts as well.s t
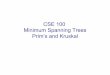
� 4 �Proof. Notice that each of R , S l S9, T j T 9 and R , S j S9, T ls t4 Ž . Ž .T 9 is a partition of V. Also, E S l S9, T j T 9 s E S j S9, T l T 9 s B,
Ž . Ž .since E S, T s E S9, T 9 s B. This implies that R separates S l S9sŽ .from T j T 9, and R separates T l T 9 from S j S9 see Fig. 1a . Int
� 4particular, we obtain that R and R are both s, t -cuts. To see that Rs t s� 4 < < < < < < < <and R are both s, t -minimum cuts, observe that R q R s C q C9t s t
< < < < < < < <and that R , R G C s C9 .s t
We begin our analysis from the following statement.

4,5-VERTEX-CONNECTED SUBGRAPHS 37
FIG. 1. Illustrations for the proofs of Lemmas 4.3 and 4.4.
LEMMA 4.4. Let G be a k-out-connected graph from a ¨ertex r of degree k,� 4 Ž .k g 4, 5 . Let C be a k y 1 -cut of G and S a side of C that contains exactly
Ž . Ž .two ¨ertices from N r , say, s and s . Then, for any k y 1 -cut of G, both1 2s and s are contained in the same side of C.1 2
Ž .Proof. Recall that, by Corollary 4.2, G is k y 1 -connected, and everyŽ . Ž .k y 1 -cut of G contains at most one vertex from N r and has exactly
Ž .two sides, containing 2 or 3 vertices from N r each. Let T be the side ofŽ .C that is distinct from S. Assume in negation that there exits a k y 1 -cut
C9 with sides S9 and T 9 such that s and s are not contained in the same1 2side of C9. Since C9 contains at most one of s , s , we assume w.l.o.g. that1 2s g S9, s f S9. Let us consider two cases:1 2
Ž .T l T 9 / B. Let t g T l T 9 see Fig. 1b . Then, clearly, both C1� 4 Žand C9 are s , t -minimum cuts. Thus, by Lemma 4.3, the cut R s C j1 1 s1
. Ž . Ž . Ž .C9 R T j T 9 is a k y 1 -cut with sides S l S9, T j T 9. But S l S9 l� 4N s s , a contradiction to Corollary 4.2.r 1
< Ž . < <T l T 9 s B. In this case s g S l T 9, since T 9 l N r G 2, C l2Ž . < Ž . Ž . <N r F 1, and S R S9 l N r s s . Moreover, T l S9 / B, since T l2Ž . < < Ž . < Ž .N r G 2 and C9 l N r F 1. Let t g T l S9 see Fig. 1c . Then the2
contradiction is obtained by using similar arguments for s , t instead of2 2s , t .1 1
Remark. Observe that Lemma 4.4, together with Corollary 4.2, implies� 4that a k-out-connected graph G from a vertex r of degree k, k g 4, 5 ,
has a vertex s neighboring to r which does not belong to any cut smallerŽ .than k in fact, there are four such vertices . Such a vertex s can be easily
Ž .recognized as a neighbor of r for which k G R s G k y 1. This observa-tion, together with Lemma 4.1, already implies a 4-approximation algo-rithm for the minimum 4- and 5-connected subgraph problems, as follows.
˜ Ž .Let G, r be the output of the OCSA for the input GG, w and k, and let,˜˜for s as above, G be the underlying graph of the minimum weights

DINITZ AND NUTOV38
Ž . � 4k-out-connected from s subdigraph of D GG . Then, for k g 4, 5 , the˜ ˜ Ž .graph G j G has no k y 1 -cuts, i.e., is k-connected. Similarly to thes
˜ ˜ ˜ ˜ ˜w x Ž . Ž . Ž . Ž .proof of 1, Lemma 4.3 , w G F 2w*. Thus, w G j G F w G q w Gs s sF 2w* q 2w* s 4w*, as required.
The following lemma is crucial to derive our 3-approximation algorithm� 4for k g 4, 5 .
LEMMA 4.5. Let G be a k-out-connected graph from a ¨ertex r of degree k,� 4 � 4 Ž .k g 4, 5 . Then there exists a pair of ¨ertices s, t ; N r such that e¨ery
Ž .k y 1 -cut of G has exactly two sides and separates s from t. Moreo¨er, forŽ .any distinct four ¨ertices s , s , t , t g N r , there exists such a pair s, t with1 2 1 2
� 4 � 4s g s , s , t g t , t .1 2 1 2
Proof. If G is k-connected, then the proof is immediate. Otherwise, byŽ . Ž .Corollary 4.2, k G s k y 1 and any k y 1 -cut has exactly two sides.
Ž .Let us suppose first that there exists a k y 1 -cut C which has exactlyŽ .two vertices from N r in each its side, say s , s and t , t . Then, by1 2 1 2
Ž . � 4Lemma 4.4, any k y 1 -cut separates s from t for any s g s , s and1 2� 4t g t , t .1 2
Ž .Otherwise, by Corollary 4.2, k s 5 and every k y 1 -cut has exactly twoŽ . Ž .vertices from N r in its one side and three vertices from N r in its otherŽ . Ž . � 4side. Let C be a k y 1 -cut, and let N r be partitioned into s , s and1 2
� 4 Ž .t , t , t by the two sides of C. Suppose now that there exists a k y 1 -cut1 2 3� 4 � 4C9 which does not separate s , s from t , t , t . Then Lemma 4.41 2 1 2 3
implies that C9 has s , s and one of t , t , t , say, t in its one side, and1 2 1 2 3 3Ž .t , t , in the other side. But then, by Lemma 4.4, every k y 1 -cut must1 2
have s , s in its one side and t , t in its other side. Also in this case, any1 2 1 2� 4 � 4pair s , t , i, j g 1, 2 , is appropriate.i j
The last part of the statement is checked by a simple case analysis.
The following statement stems straightforwardly from Menger’s theo-rem.
� 4FACT 4.6. Let G be a connected graph that has a pair s, t of ¨erticessuch that any l-cut of G with l - k has exactly two sides and separates s fromt. Let F be a set of edges. Then G j F is k-connected if and only if in G j Fthere are k internally disjoint paths between s and t.
Now let GG be a weighted graph, and let G be a spanning subgraph of GG
� 4with a pair s, t as in the above statement. By Fact 4.6, finding an optimaledge set F such that G j F is k-connected is equivalent to finding anoptimal edge set F such that in G j F there are k internally disjointpaths between s and t. The latter problem can be solved in polynomialtime via a reduction to the min-cost k-flow problem with unit capacities of
Ž w x.vertices see, e.g., 4 ; we use such a reduction below at Phase 2 of ouralgorithm.

4,5-VERTEX-CONNECTED SUBGRAPHS 39
We now present our 3-approximation algorithm for the minimum weight4- and 5-connected subgraph problems.
4 AND 5-CONNECTED SUBGRAPH ALGORITHM.
Ž . � 4Input: A k-connected weighted graph GG, w and an integer k, k g 4, 5 .
Output: A k-connected spanning subgraph of GG.
˜Ž .Phase 1. Execute OCSA or ROCSA on the input GG, w, k, and let G, r be˜the output;
˜Phase 2. Change the weight of any edge in G to zero;Ž .Choose any four vertices s , s , t , t g N r ;˜˜1 2 1 2 G
� 4 � 4For e¨ery pair of vertices s g s , s , t g t , t do:1 2 1 2Ž . � 41 Find in GG, with capacity 1 of every vertex in V R s, t , a
w xminimum cost k-flow from s to t, using the algorithm 10 ;Ž .1 Find k internally disjoint paths between s and t, by path
Ž .decomposition of this flow; let F s, t be the union of their edgesets;
˜Ž . Ž . w x3 Check whether G j F s, t is k-connected, using algorithm 6 ;˜ Ž .If it is, then terminate with G j F s, t ;
end for;
THEOREM 4.7. The 4- and 5-Connected Subgraph Algorithm is a 3-ap-proximation algorithm for the minimum weight k-connected subgraph prob-
� 4 Ž 3 . Ž 5.lems, k g 4, 5 . The time complexity of the algorithm is O n m s O nŽ . Ž 2 . Ž 4 .deterministic using OCSA or O n m log n s O n log n randomized
Ž .using ROCSA .
Ž .Proof. At Phase 2 the algorithm finds edge sets F s, t such that in˜ Ž .G j F s, t there are k internally disjoint paths between s and t. By
� 4Lemma 4.5 and Fact 4.6, for at least one of the pairs s, t examined by the˜ Ž .algorithm, G j F s, t is k-connected. This shows the correctness of the
algorithm.˜We turn now to show the approximation ratio. Let E be the edge set of
˜ Ž .G, and let F s F s, t be the additional edge set chosen by the algorithm.˜ ˜ ŽThe set F R E is an optimal augmenting edge set for G see the discussion
.before the description of the algorithm ; clearly, its weight is at most w*.˜ ˜ ˜ ˜w x Ž . Ž . Ž . Ž .By 1 , w G F 2w*. Summarizing, w G j F s w G q w F R E F 2w*
q w* s 3w*.Let us discuss the time complexity. At Phase 2 the algorithm finds a
minimum cost k-flow and checks k-connectivity at most four times. Com-Ž Ž .. w xputing a minimum cost k-flow takes O n log n m q n log n time 10 ,
Ž 2 2 3 1.5. w xand k-connectivity is checked in O k n q k n time 6 . Hence, thedominating time is spent for executing Phase 1, i.e., the complexity of the

DINITZ AND NUTOV40
algorithm using OCSA or ROCSA is the same as the complexity of OCSAor ROCSA, respectively.
Remark. It can be easily shown that the same approximation ratio isvalid even if at Phase 2 of the algorithm we do not reduce the weights of
˜edges in G to zero. However, this reduction guarantees optimality of theedge set addition at Phase 2.
REFERENCES
1. V. Auletta, Ye. Dinitz, Z. Nutov, and D. Parente, A 2-approximation algorithm forŽ .finding an optimum 3-vertex-connected spanning subgraph, J. Algorithms 31 1999 .
2. V. Auletta and D. Parente, Better algorithms for minimum-weight connectivity problems,Žin ‘‘Proc. 14th Annual Symposium on Theoretical Aspects of Computer Science STACS
. Ž .’97 ’’ R. Reischuk and M. Morvan, Eds. , Lecture Notes in Comput. Sci., Vol. 1200, pp.547]558, Springer-Verlag, Berlin, 1997.
3. Ye. Dinitz and Z. Nutov, Finding minimum weight k-vertex connected spanning sub-graphs: approximation algorithms with factor 2 for k s 3 and factor 3 for k s 4, 5, in
Ž .‘‘Proc. 3rd Italian Conf. on Algorithms and Complexity, CIAC’97, Rome, March 1997 ’’Lecture Notes in Comp. Sci., vol. 1203, pp. 13]24, Springer-Verlag, 1997.
4. A. Frank, Connectivity augmentation problems in network design, in ‘‘MathematicalŽ .Programming, the State of the Art’’ J. R. Birge and K. G. Murty, Eds. , pp. 34]63,
Springer-Verlag, New YorkrBerlin, 1994.5. H. N. Gabow, A representation for crossing set families with application to submodular
flow problems, in ‘‘Proc. 4th Annual ACM-SIAM Symp. on Discrete Algorithms,’’ pp.202]211, 1993.
Ž .6. Z. Galil, Finding the vertex connectivity of graphs, SIAM J. Comput. 9 1980 , 197]199.7. W. Mader, Ecken vom Grad n in minimalen n-fach zusammenhangenden Graphen,¨
Ž . Ž .Archi . Math. Basel 23 1972 , 219]224.8. Z. Nutov, ‘‘Improved Approximation Algorithms for Finding Optimum k-Vertex-Con-
nected Spanning Subgraphs,’’ TR CORR 98-03, University of Waterloo, Waterloo,Canada, 1998.
9. Z. Nutov and M. Penn, Faster approximation algorithms for weighted triconnectivityŽ .augmentation problems, Operations Research Letters 21 1997 , 219]223.
10. J. B. Orlin, A faster strongly polynomial minimum cost flow algorithm, OperationsŽ .Research 41 1993 , 338]350.
11. M. Penn and H. Shasha-Krupnik, Improved approximation algorithms for weighted 2 & 3Ž .vertex connectivity augmentation problems, J. Algorithms 22 1997 , 187]196.
12. R. Ravi and D. P. Williamson, An approximation algorithm for minimum-cost vertex-con-Ž .nectivity problems, Algorithmica 18 1997 , 21]43.