Embed Size (px)
Citation preview

IN DEGREE PROJECT THE BUILT ENVIRONMENT,SECOND CYCLE, 30 CREDITS
, STOCKHOLM SWEDEN 2020
A 3D sliding bearing finite element based on the Bouc-Wen modelImplementation in Abaqus
RÉMI LANTOINE
KTH ROYAL INSTITUTE OF TECHNOLOGYSCHOOL OF ARCHITECTURE AND THE BUILT ENVIRONMENT

1
A 3D sliding bearing finite element based on the Bouc-Wen model Implementation in Abaqus
Rémi Lantoine
Supervisor:
Dr. Mahir Ülker-Kaustell
Tyréns AB
Examiner:
Prof. Raid Karoumi
KTH Royal Institute of Technology

2
Summary As rail transportation is significantly more virtuous than airplanes or cars in terms of greenhouse
gases emissions, its development is being encouraged in several European countries, including Sweden. In addition, the development of railway lines on which trains can travel at higher speeds is made in Sweden with the integration of existing infrastructure. On railway bridges, an increased train speed potentially leads to an increase in vibrations during passage, for which the structure may not be designed. It is therefore essential to know the dynamic properties of the structures used.
Several studies highlight the influence of friction phenomena in sliding bearings on the dynamic properties of bridges equipped with them. This Master Thesis is based on previous works that led to the development of a finite element modelling the friction mechanisms that occur in these bearings. The friction occurring between a PTFE sliding plate and a steel surface is thus modelled using the Bouc-Wen model, a model for hysteresis phenomena. The finite element was developed as a Fortran subroutine, which can be integrated into the finite element calculation software Abaqus as a "user-defined element". It allows friction to be modelled along the longitudinal direction of the bridge only and can therefore only be used in two-dimensional models. The user-defined element is also based on a model that takes into account the influence of contact pressure and sliding velocity on the steel-PTFE coefficient of friction. As several studies indicate, contact temperature can also have a significant influence on the value of the coefficient of friction but is not taken into account in the current model.
In this project, the previously developed finite element was therefore generalized to account for friction in both directions of the sliding plate by the means of a two-dimensional generalization of the Bouc-Wen model. Based on experimental data available in scientific literature, the model for calculating the coefficient of friction was also extended to take into account the influence of the contact temperature. In addition, a model to update the contact temperature based on the theory of surface heating of semi-infinite bodies has been incorporated. Finally, this thesis presents the integration of this updated finite element on three-dimensional models of the Banafjäl Bridge, located in northern Sweden. Simulations to estimate the fundamental frequencies and resonance modes of the structure as well as the temperature increase that can occur in a bearing during the passage of a train were carried out on this model.
Keywords
Railway bridge, dynamics, resonance, sliding bridge bearings, finite element, Abaqus, friction, steel, Teflon, PTFE, Bouc-Wen model, friction coefficient, temperature, heating

3
Sammanfattning Eftersom tåget är märkbart bättre än flygplanet eller bilen när det gäller utsläppen av
växthusgaser, uppmuntras dess utveckling i flera europeiska länder, inklusive Sverige. Dessutom görs i Sverige utvecklingen av järnvägslinjer på vilka tåg kan färdas med högre hastigheter med integration av befintlig infrastruktur. På järnvägsbroar leder en ökad tåghastighet potentiellt till en ökad vibration under passagen, för vilken konstruktionen kanske inte är dimensionerad. Det är därför viktigt att känna till de använda strukturernas dynamiska egenskaper.
Flera studier belyser påverkan av friktionsfenomen i glidande brolager på de dynamiska egenskaperna hos broar utrustade med dem. Detta examensarbete är baserat på tidigare verk som ledde till utvecklingen av ett finit element som modellerar friktionsmekanismerna som förekommer i dessa lager. Friktionen som uppstår mellan en PTFE-glidplatta och en stål yta är därför modellerad med Bouc-Wen-modellen, en modell för hysteresisfenomen. Det finita elementet utvecklades som en Fortran programkod, som kan integreras i den finita elementprogramvaran Abaqus som ett "användardefinierat element" (user-defined element). Elementet gör att friktion endast kan modelleras längs bronslängdriktning och kan därför endast användas i tvådimensionella modeller. Det användardefinierade elementet är också baserat på en modell som tar hänsyn till påverkan av kontakttryck och glidhastighet på stål-PTFE friktionskoefficient. Som flera studier indikerar kan kontakttemperatur också ha en betydande påverkan på värdet på friktionskoefficienten men beaktas inte i den nuvarande modellen.
I detta projekt generaliserades därför det tidigare utvecklade finita elementet för att ta hänsyn till friktion i båda glidplattans riktningar med hjälp av en tvådimensionell generalisering av Bouc-Wen-modellen. Baserat på experimentella data tillgängliga i den vetenskapliga litteraturen utvidgades också modellen för beräkning av friktionskoefficienten för att ta hänsyn till kontakttemperaturens påverkan. Dessutom integrerades en modell för uppdatering av kontakttemperaturen baserat på teorin för ytuppvärmning av halvändliga kroppar. Slutligen presenterar denna avhandling integrationen av detta uppdaterade finita element på tredimensionella modeller av Banafjälbron, som ligger i norra Sverige. Simuleringar för att uppskatta de grundläggande frekvenserna och resonanslägena för strukturen såväl som den temperaturökning som kan uppstå i ett lager under passagen av ett tåg genomfördes på denna modell.
Nyckelord
Järnvägsbro, dynamik, resonans, glidande brolager, finita element, Abaqus, friktion, stål, Teflon, PTFE, Bouc-Wen-modell, friktionskoefficient, temperatur, uppvärmning

4
Résumé Le train étant un mode de transport significativement plus vertueux que l’avion ou la voiture sur
le plan des émissions de gaz à effet de serre, son développement est encouragé dans plusieurs pays européens dont la Suède. En outre, le développement de lignes où les trains peuvent circuler à plus grande vitesse s’accompagne en Suède par une intégration des infrastructures existantes. Sur les ponts ferroviaires, l’augmentation de la vitesse des trains induit potentiellement une augmentation des vibrations lors du passage, ce pour quoi la structure n’est peut-être pas dimensionnée. Il est ainsi primordial de connaître les propriétés dynamiques des structures utilisées.
Plusieurs études mettent en évidence l’influence des phénomènes de frottement dans les appareils d’appui glissants sur les propriétés dynamiques des ponts qui en sont équipés. Cette thèse de master reprend des travaux qui ont mené au développement d’un élément fini modélisant les mécanismes de frottement qui surviennent dans ces appareils d’appui. Le frottement intervenant entre une plaque de glissement en PTFE et une surface en acier est ainsi modélisé à l’aide du modèle de Bouc-Wen, un modèle pour les phénomènes d’hystérèse. L’élément fini a été développé sous la forme d’un code écrit en Fortran, intégrable sur le logiciel de calcul éléments finis Abaqus en tant que « élément défini par l’utilisateur » (user-defined element). Il permet de modéliser le frottement dans la direction longitudinale du pont uniquement, si bien qu’il ne peut être utilisé que dans des modèles en deux dimensions. L’élément fini s’appuie également sur un modèle permettant de prendre en compte l’influence de la pression de contact et de la vitesse de glissement sur le coefficient de frottement acier-PTFE. Comme l’indiquent plusieurs études, la température de contact peut aussi avoir une influence significative sur la valeur du coefficient de frottement mais n’est pas prise en compte dans le modèle actuel.
Au cours de ce projet, l’élément fini précédemment développé a donc été généralisé de sorte à prendre en compte le frottement selon les deux directions de la plaque de glissement au moyen d’une généralisation à deux dimensions du modèle de Bouc-Wen. En s’appuyant sur des données expérimentales disponibles dans la littérature scientifique, le modèle de calcul du coefficient de frottement a également été élargi, de sorte à prendre en compte l’influence de la température de contact. De plus, un modèle permettant d’actualiser la température de contact fondé sur la théorie de l’échauffement de surface des corps semi-infinis a été intégré. Cette thèse présente enfin l’intégration de cette nouvelle version de l’élément fini sur des modèles en trois dimensions du pont Banafjäl, situé au nord de la Suède. Des simulations permettant d’estimer notamment les fréquences et modes de résonance fondamentaux de la structure ainsi que l’augmentation de température qui peut survenir dans un appareil d’appui lors du passage d’un train ont été menées sur ce modèle.
Mots-clés
Pont ferroviaire, dynamique, résonance, appareils d’appui glissants, élément fini, Abaqus, frottement, acier, téflon, PTFE, modèle de Bouc-Wen, coefficient de frottement, température, échauffement

5
Acknowledgements I would first like to thank Mahir Ülker-Kaustell for giving me the opportunity of working on this
very interesting and enriching Master Thesis project. It was a real pleasure to join Mahir and integrate the bridge department of Stockholm’s Tyréns offices. I found there a stimulating working atmosphere with welcoming employees. This gave me a glimpse on the Swedish working life, which I enjoyed very much. I would also like to thank the four other master students from KTH who became my colleagues for a few months in the frame of this Master Thesis. Among them, I especially wish to thank Sicong Wei with whom I collaborated on the topic developed here.
After two months in the offices of Tyréns, this Master Thesis took a very particular turn because of the coronavirus outbreak. As most office employees in Sweden, I had to start working from home and this until the end of the project. For this reason, I wish to thank particularly Louise who supported me very much during these months at home and also helped me with the design of some figures that are presented in this thesis.

6
Contents SUMMARY 2
SAMMANFATTNING 3
RÉSUMÉ 4
ACKNOWLEDGEMENTS 5
1. INTRODUCTION 8
1.1. BACKGROUND 8 1.2. AIMS AND SCOPE 8
2. LITERATURE SURVEY 10
2.1. THE BOUC-WEN MODEL 10 2.1.1. Genesis of the model 10 2.1.2. Application of the model to unidirectional friction 10 2.1.3. Bidirectional extension and application to friction within a plane 11
2.2. STEEL-PTFE FRICTION TEST DATA 11 2.2.1. Influence of contact pressure 12 2.2.2. Influence of sliding velocity 12 2.2.3. Influence of air temperature 13 2.2.4. Influence of contact temperature 14 2.2.5. Models accounting for influence parameters 15
3. THEORY 17
3.1. SLIDING BEARINGS 17 3.2. FRICTION 18
3.2.1. Coulomb friction 19 3.2.2. Hysteretic aspect of friction 21
3.3. THE BOUC-WEN MODEL 21 3.3.1. Original model for unidirectional systems 21 3.3.2. Using the Bouc-Wen model as a model for friction 24 3.3.3. Extension to bidirectional systems 25
3.4. CONTACT INTERFACE HEATING WITH RESPECT TO FRICTION 27 3.4.1. Surface heating of semi-infinite bodies 28 3.4.2. Application to contact interface heating 31
3.5. THE FINITE ELEMENT METHOD 32 3.5.1. General principle 33 3.5.2. Problem to solve and its variational formulation 33 3.5.3. Matrix formulation 34
4. METHOD 37
4.1. EXISTING USER-DEFINED FINITE ELEMENT BASED ON THE BOUC-WEN MODEL 37 4.1.1. User-defined elements in Abaqus 37 4.1.2. Sliding bearing finite element specifications 39 4.1.3. Model for unidirectional steel-PTFE friction 41

7
4.1.4. Model for the dependency of the coefficient of friction on contact pressure and sliding velocity 44
4.2. GENERALIZATION OF THE EXISTING USER-DEFINED ELEMENT 45 4.2.1. Bidirectional steel-PTFE friction model based on the Bouc-Wen model 45 4.2.2. Model for the dependency of the coefficient of friction on contact temperature 48 4.2.3. Model for contact temperature increase with respect to friction 50
4.3. MODELLING OF THE BANAFJÄL BRIDGE 51 4.3.1. Model with Euler-Bernoulli beams 52 4.3.2. Model with regular Timoshenko beams and detailed ends using shell elements 53
4.4. CASE STUDIES 54 4.4.1. Verification of the bidirectional steel-PTFE friction model 55 4.4.2. Computation of the contact temperature increase in a sliding bearing resulting from a train
passage 58 4.4.3. Response of the Banafjäl bridge to an impulse load 59
5. RESULTS 60
5.1. VERIFICATION OF THE BIDIRECTIONAL STEEL-PTFE FRICTION MODEL 60 5.1.1. Comparison to results given by the unidirectional model 60 5.1.2. Influence of the “knee-sharpness” parameter 𝒏 67 5.1.3. Comparison to the model proposed by Constantinou et al. (1990) 68
5.2. CONTACT TEMPERATURE INCREASE IN A SLIDING BEARING RESULTING FROM A TRAIN PASSAGE 70 5.3. BRIDGE RESPONSE TO AN IMPULSE LOAD 72
6. DISCUSSION 74
6.1. VERIFICATION OF THE BIDIRECTIONAL STEEL-PTFE FRICTION MODEL 74 6.1.1. Comparison to results given by the unidirectional model 74 6.1.2. Influence of the “knee-sharpness” parameter 𝒏 74 6.1.3. Comparison to the model proposed by Constantinou et al. (1990) 75
6.2. MODEL FOR THE DEPENDENCY OF THE COEFFICIENT OF FRICTION ON CONTACT TEMPERATURE 75 6.3. MODEL FOR ESTIMATING THE INCREASE IN CONTACT TEMPERATURE IN A SLIDING BEARING 76
6.3.1. Contact temperature increase resulting from a train passage 76 6.3.2. Use of semi-infinite bodies to solve the heat equation 76
6.4. BRIDGE RESPONSE TO AN IMPULSE LOAD 77
7. CONCLUSIONS 79
7.1. OUTCOME OF THIS THESIS 79 7.2. FURTHER WORK 79
REFERENCES 80

8
1. Introduction
1.1. Background This Master Thesis project is part of a wider range of studies in the field of railway bridges
dynamics conducted in collaboration between the division of Structural Engineering and Bridges at KTH and the Swedish consulting company Tyréns. More specifically, this project assesses a model for the mechanical behaviour of pot bearings present in modern high-speed railway bridges.
The interaction between these bridges and passing trains is characterized by repetitive moving axle loads. Depending on the speed of the train, these loads may result in much greater displacements in the structure than those induced by static loads of the same magnitude. This amplification is the greatest at a critical train speed 𝑣𝑐𝑟 given by the following equation where 𝑓𝑛 is the fundamental natural frequency of the structure and 𝐿 is the characteristic length between two consecutive axles.
𝑣𝑐𝑟 = 𝑓𝑛𝐿 (1-1)
A good design of the bridge structure enables a control over the fundamental frequency 𝑓𝑛 so that the critical speed 𝑣𝑐𝑟 can be set far enough from desired train speeds to avoid resonance issues. Modelling the structure and all its constitutive elements has a crucial role in the design process. In this context, the sliding mechanisms in bearings1 need to be assessed as they may influence the dynamic properties of the bridge. One type of commonly used bearings in modern railway bridges are pot bearings. Sliding mechanisms occur in their steel-PTFE2 contact interfaces. In order to model the energy dissipation during sliding, a FEM3 model of pot bearings is used. Steel-PTFE contact interfaces are currently modelled by 2D macro elements, using the Bouc-Wen model of hysteresis. These are user defined elements that are implemented in the software ABAQUS using a FORTRAN subroutine.
1.2. Aims and scope The general aim of the research project including this Master Thesis is to improve the
understanding of the influence that pot bearings have on the dynamic properties of high-speed railway bridges. One should be able to state if a given set of pot bearings provides sufficient damping through their sliding mechanisms to be reliable in a case of resonance. A better understanding of the bearing friction mechanisms could also help designing better bearings or even better bridge structures
1 Elements that transfer loads from the superstructure to the substructure of the bridge while providing a free relative movement between these two parts. 2 Polytetrafluoroethylene, a thermoplastic polymer commonly called by the brand name Teflon. 3 Finite Element Method

9
regarding their response to resonance. From that perspective, being able to quantify accurately the friction in steel-PTFE contact interfaces is essential.
Being part of this general project, this Master Thesis project aims more specifically at developing a 3D macro element based on the existing 2D element that is used to model the mechanical behaviour of steel-PTFE contacts. These 3D elements will also use the Bouc-Wen model in order to account for the hysteretic behaviour of the steel-PTFE contact interface. This mathematical model is indeed commonly used to describe hysteretic behaviour. This kind of behaviour can be observed when studying the force-displacement curves associated to a friction mechanism.
The motivation for generalizing the existing 2D elements to new 3D elements is that they can only be used when analysing railway bridges with 2D models and transversal bending. Since the actual sliding mechanisms in pot bearings may also influence torsional vibration modes, a 3D analysis of railway bridges, and thus a 3D model for pot bearings, is needed. The 2D elements currently only account for unidirectional friction and their 3D generalization needs to account for bidirectional friction.
Additional aims of the project are the development of a model to account for contact temperature influence on steel-PTFE friction coefficient and the implementation of a model to evaluate frictional heating. The current model used to evaluate the coefficient of friction is based on experiments carried out on a multidirectional pot bearing and only accounts for the influence of contact pressure and sliding velocity. These two additional models would then enable to update the value of the coefficient of friction as the sliding plate is heated up during a simulation.
In the frame of this thesis, the newly developed 3D sliding bearing finite element is intended to be tested on the following points:
- A verification of the bidirectional friction model will be made by comparing its outputs to those of the unidirectional model on simple cases: a unidirectional movement with an arbitrary fixed orientation within the sliding plate and the same movement but with a rotating orientation. The influence of a parameter that can have any value in the unidirectional model but has a fixed value in the bidirectional model will also be assessed.
- The increase in contact temperature in sliding bearings due to a train passage on a bridge will be calculated thanks to the frictional heating model.
- The response of a bridge equipped with sliding bearings (the Banafjäl bridge) to an impulse load will be simulated and analysed in order to predict the first resonance frequencies of the structure. These predictions will be compared to experimental measurements on the bridge.

10
2. Literature survey
2.1. The Bouc-Wen model Although initially developed for mechanical applications, the Bouc-Wen model is a model for
hysteresis phenomena in general. The word “hysteresis” was introduced around 1890 by the Scottish physicist Sir James Alfred Ewing from the Greek word “ὑστέρησις” – which literally means “lagging behind” – to describe the behaviour of magnetic materials. What he wanted to describe more specifically was the fact that these materials can take different magnetic moments for the same magnetic field, depending on the past evolution of the field in which they are located. Hysteresis corresponds in fact to the dependence of the state of a system on its past evolution. This phenomenon occurs in various fields of natural sciences such as biology, electronics, aerodynamics, mechanics, magnetism and many more. When plotting the evolution of one state parameter of such a system as a function of another one, loop patterns typically occur. These are called “hysteresis loops”.
2.1.1. Genesis of the model In mechanics, the description of hysteresis phenomena with the laws of physics is complex. For
this reason, empirical mathematical models are preferred. As he was precisely assessing the mathematical modelling of hysteresis for mechanical and structural systems in the frame of his doctoral thesis, Robert Bouc proposed in 1967 what is now known as the Bouc-Wen model (Bouc, 1967), (Bouc, 1969). A few years later Yi-Kwei Wen extended the model and showed that it could reproduce a wide range of hysteretic loops shapes that can result from various hysteretic phenomenon not only occurring in mechanics (Wen, 1976). The formulation of their original model is given in equations (3-6) and (3-7) in section 3.3 that deals with the theoretical aspects of the model. The model is based on an internal hysteretic variable whose value captures the state of the hysteretic system. The response and energy dissipation resulting from the Bouc-Wen model have been extensively studied by Charalampakis and Koumousis who derived analytical formulas in some specific cases (Charalampakis & Koumousis, 2008).
2.1.2. Application of the model to unidirectional friction As explained further in section 3.2.2, friction typically produces hysteretic patterns. Assessing the
modelling of steel-PTFE sliding bearings under seismic dynamic loadings, Constantinou et al. adapted the Bouc-Wen model to a friction model (Constantinou, Mokha, & Reinhorn, 1990). They showed that the Bouc-Wen model is able to account for both static and kinetic friction forces in a single equation (cf. equation (3-14) in section 3.3.2) and to model the transition from one state to the other. Constantinou had already been working on the model for a few years and suggested in collaboration

11
with Adnane to add a constraint (cf. equation (6-2) in section 3.3.1) between the model’s parameters in order to reduce the number of parameters to determine (Constantinou & Adnane, 1987). This is motivated by a redundancy in the roles played by each of these parameters. In his doctoral thesis that deals with finite element modelling of railway bridges for dynamic analysis, Mahir Ülker-Kaustell designed a finite element based on the Bouc-Wen model in order to model the response of steel-PTFE sliding bearing to dynamic loads (Ülker-Kaustell, 2013), (Ülker-Kaustell, 2017). This thesis is a continuation of that project.
2.1.3. Bidirectional extension and application to friction within a plane In 1986, Park, Wen and Ang extended the original Bouc-Wen to a bidirectional hysteresis model
in order to be able to model the response of some structural systems to bidirectional seismic ground excitations (Park, Wen, & Ang, 1986). The extension is based on two internal hysteretic variables (one for each base direction) whose evolutions are coupled to each other. However, the “knee-sharpness” parameter 𝑛 (cf. section 3.3.1) that was present in the original model has a fixed value 𝑛 = 2 in the extension made by Park et al. In 2000, Wang and Wen made an extension to the bidirectional hysteresis developed by Park et al. in order to allow arbitrary values of 𝑛 (Wang & Wen, 2000). Nevertheless, this extension made the model lose its “rotational invariance”, i.e. the fact that it has the same behaviour regardless of the instantaneous direction of the motion on the bidimensional surface. An alternative bidirectional extension of the original Bouc-Wen model was made by Harvey and Gavin in 2014 (Harvey & Gavin, 2014). It allows arbitrary value of “knee-sharpness” and is “rotational invariant”. The bidirectional extension of Bouc-Wen that is used in this thesis is however the one developed by Park et al.
In addition to the application of the Bouc-Wen model to unidirectional friction, Constantinou et al. also introduced the application of its extension to steel-PTFE bidirectional friction in 1990 (Constantinou, Mokha, & Reinhorn, 1990). In 2007, Martin-Artieda et al. further applied the model to a bidirectional friction pendulum (Marin-Artieda, Whittaker, & Constantinou, 2007).
2.2. Steel-PTFE friction test data As steel-PTFE contact interfaces have been used for a few decades in bridge bearings, their
frictional behaviour has been the subject of several studies, mostly for its application in seismic isolation. Experimental tests assessing the influence of several parameters on the coefficient of friction has been performed by Tyler (Tyler, 1977), Constantinou and some of his colleagues (Constantinou, Caccese, & Harris, 1987), (Constantinou, Mokha, & Reinhorn, 1990) as well as Dolce and his co-workers (Dolce, Cardone, & Croatto, 2005). Some of the influence parameters presented in their studies can be included in analytical models that may be used to compute a parameter-dependent value for steel-PTFE friction coefficient. The parameters influencing the coefficient of friction that were assessed in the studies listed above are:

12
- Contact pressure - Sliding velocity - Ambient air temperature - Contact temperature
2.2.1. Influence of contact pressure In addition to its direct relation to the magnitude of the frictional force within a proportional law
(cf. section 3.2), the contact pressure also has an influence on the proportionality coefficient itself in the case of steel-PTFE friction. To be more precise, the relationship between the steel-PTFE frictional force and the pressure applied on the contact interface cannot be modelled by a proportional law with a constant proportionality coefficient as in Coulomb friction. Modelling steel-PTFE friction with a Coulomb model requires therefore to account for the deviation from the proportional law by considering the coefficient of friction as a function of contact pressure.
As Tyler suggests in his study in which he measured the steel-PTFE frictional force for contact pressures from 10 MPa to 30 MPa (Tyler, 1977), the coefficient of friction decreases as the pressure increases while other parameters are kept constant. This was later confirmed by Constantinou et al. who reproduced Tyler’s experimental results (Constantinou, Mokha, & Reinhorn, 1990). In 2005, Dolce and his colleagues highlighted the fact that the rate of reduction of the coefficient of friction is almost constant and is not much sensitive to sliding velocity and temperature conditions (Dolce, Cardone, & Croatto, 2005).
2.2.2. Influence of sliding velocity The influence of sliding velocity on the magnitude of the steel-PTFE frictional force was
investigated in 1987 by a research team lead by Constantinou (Constantinou, Caccese, & Harris, 1987). They observed that the coefficient of friction increases with the sliding velocity while other parameters such as the contact pressure are kept constant. Three years later, another research in which Constantinou was involved (Constantinou, Mokha, & Reinhorn, 1990) confirmed these results and showed a greater increase rate for small velocities, while the rate reaches almost zero above a certain sliding velocity.
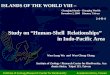
With a series of tests performed at different pressure (9.36 MPa, 18.7 MPa and 28.1 MPa) and temperature (-10°C, 20°C and 50°C) conditions, Dolce and his colleagues later came to the same conclusion (Dolce, Cardone, & Croatto, 2005). Their experimental data at 20°C are shown in Figure 2-1 and compared with analytical models presented in section 2.2.5.

13
Figure 2-1 - Demonstration of the influence of sliding velocity on steel-PTFE friction coefficient with an ambient air temperature of 20°C by (Dolce, Cardone, & Croatto, 2005).
2.2.3. Influence of air temperature In 1977, Tyler brought to light the fact that a cold air temperature (around -15°C) results in a
greater steel-PTFE friction coefficient than the one resulting from the same loading conditions at a warmer air temperature (around 20°C) (Tyler, 1977). The difference between results obtained at the two different air temperatures gets much smaller as the number of cycles increases. Indeed, the actual measured temperature on the steel-PTFE contact interface increases significantly in both cases and give similar results for similar contact temperatures, regardless of the air temperature.
The influence of air temperature on steel-PTFE friction coefficient was also assessed by Dolce et al. under various pressure and sliding velocity conditions (Dolce, Cardone, & Croatto, 2005). The PTFE pads were changed after every third test performed at the same temperature (held constant in a thermal chamber). Each test consisting in a periodic loading of five cycles, the contact temperature may have increased a little over a set of three tests although the actual increase was not measured. As it can be seen on Figure 2-2, the coefficient of friction decreases as air temperatures increases while other test parameters are held constant. Figure 2-2 shows the evolution of the coefficient of friction with respect to air temperature for a sliding velocity of 8 mm/s (a) and 316 mm/s (b).

14
Figure 2-2 - Demonstration of the influence of air temperature on steel-PTFE friction coefficient with a sliding velocity of 8 mm/s (a) and 316 mm/s (b) by (Dolce, Cardone, & Croatto, 2005).
2.2.4. Influence of contact temperature Lomiento et al. assessed the effect of the distance travelled through sliding in steel-PTFE bearings
on the coefficient of friction (Lomiento, Bonessio, & Benzoni, 2013). They explain the continuous drop in the coefficient of friction previously observed by Constantinou et al. (Constantinou, Mokha, & Reinhorn, 1990) and Chang et al. (Chang, Hwang, & Lee, 1990) with a local decrease in hardness of PTFE through frictional heating. Nakahara indeed showed that an increase in contact temperature due to frictional heating results in a local softening of the materials, and thus a hardness reduction (Nakahara, 2005). The influence of contact temperature on the coefficient of friction was also assessed in 2007 by Constantinou et al. who noticed a greater decrease in the coefficient as the contact temperature increases from -40°C to 20°C than when the temperature increases further above 20°C (Constantinou, Whittaker, Kalpakidis, Fenz, & Warn, 2007). They also noticed that the coefficient of

15
friction tends to a constant value above 250°C for the temperature measured at the steel-PTFE sliding interface.
2.2.5. Models accounting for influence parameters In their study in which the influence of several parameters on the coefficient of steel-PTFE friction
was investigated (Dolce, Cardone, & Croatto, 2005), Dolce et al. fitted two analytical models with their experimental data. Both models are primarily thought to fit the shape of the evolution of the coefficient of friction with respect to the sliding velocity (cf. Figure 2-1) but also include the influence of contact pressure and temperature within their parameters. The first of these two models, called the “exponential model”, was proposed by Constantinou and his colleagues (Constantinou, Mokha, & Reinhorn, 1990). It uses the additive inverse of an exponential decay function in order to account for the levelling off of the coefficient value above a certain sliding velocity. Equation (2-1) gives the expression of the coefficient of friction with this model.
𝜇 = 𝜇𝑚𝑎𝑥 − (𝜇𝑚𝑎𝑥 − 𝜇𝑚𝑖𝑛)𝑒−𝛼𝑣 (2-1)
In equation (2-1) 𝜇𝑚𝑎𝑥 is the asymptotic value reached by the coefficient of friction for very high velocities, 𝜇𝑚𝑖𝑛 is the value for very low velocities and 𝛼 models the rate at which the coefficient increases along with the velocity. The second model is called the “logarithmic model” in Figure 2-1 and is derived from an analytical model proposed by Chang et al. (Chang, Hwang, & Lee, 1990). With this model, the coefficient of friction does not stop increasing as the sliding velocity increases but the growth rate becomes smaller and smaller, hence the use of a logarithm in equation (2-2) describing the model.
𝜇 = 𝑎 + 𝑏 ⋅ ln(𝑣) (2-2)
Parameters 𝑎 and 𝑏 appearing in equation (2-2) and parameters 𝜇𝑚𝑖𝑛, 𝜇𝑚𝑎𝑥 and 𝛼 from equation (2-1) can account for the dependency of the coefficient of friction on contact pressure and temperature with a second order polynomial fit model like the one proposed in equation (2-3) with a function 𝑓(𝑝, 𝑇).
𝑓(𝑝, 𝑇) = 𝜆1 + 𝜆2𝑝 + 𝜆3𝑝2 + 𝜆4𝑇 + 𝜆5𝑇2 (2-3)
Another model accounting for the influence of contact pressure, sliding velocity and contact temperature was proposed in 2015 by Kumar et al. (Kumar, Whittaker, & Constantinou, 2015). They use a reference value 𝜇𝑟𝑒𝑓 defined for reference pressure 𝑝0 and temperature 𝑇0 for a sliding movement having a very high velocity. This reference value is then multiplied by three factors that independently model the dependency on pressure, temperature and velocity:

16
𝜇(𝑝, 𝑇, 𝑣) = 𝜇𝑟𝑒𝑓 ⋅ 𝑘𝑝(𝑝) ⋅ 𝑘𝑇(𝑇) ⋅ 𝑘𝑣(𝑣) (2-4)
The three factors 𝑘𝑝, 𝑘𝑇 and 𝑘𝑣 respectively model the influence of contact pressure, contact temperature and sliding velocity with decreasing power (i.e. exponential) laws:
{𝑘𝑝(𝑝) = ��𝑝 + (1 − ��𝑝)𝑎𝑝
ℎ𝑝(𝑝−𝑝0)
𝑘𝑇(𝑇) = ��𝑇 + (1 − ��𝑇)𝑎𝑇ℎ𝑇(𝑇−𝑇0)
𝑘𝑣(𝑣) = 1 − (1 − ��𝑣)𝑒−𝑎𝑣 (2-5)
In equation (6-2), parameters ��𝑝 (resp. ��𝑇) denotes the ratio between the value of the coefficient of friction at a very high velocity and a high pressure (resp. high temperature) to the reference coefficient of friction while ��𝑣 denotes the ratio between the coefficient of friction at very small sliding velocity and the reference coefficient. 𝑎𝑝, ℎ𝑝, 𝑎𝑇, ℎ𝑇 and 𝑎 influence the shape of the modelling function.

17
3. Theory In this chapter is presented the theory on which the sliding bearing finite element is based. This
theory was implemented in the steel-PTFE friction model, the contact temperature influence model as well as the frictional heating model within the Fortran subroutine defining the element. This element is intended to be used in bridge models that use the following orientation convention:
- The longitudinal axis is the 𝑥-axis of a direct orthonormal coordinate system. - The transverse axis is its 𝑦-axis. - The vertical axis is its 𝑧-axis.
This orientation convention implies that sliding within the bearing element occurs in the 𝑥 − 𝑦 plane while vertical loads are transferred to the bearing along the 𝑧-axis.
3.1. Sliding bearings Bridges may often feature bearings that are placed between the deck and the piers. These
components can transmit loads from the deck to the piers while allowing relative movements between these parts, without inducing constraint forces. Such movements can for instance be induced by thermal expansion, creep, external seismic activity or, in this project context, vibrations due to dynamic traffic loads on railway bridges. Bridge bearings can be divided into several categories:
- Pin bearings: They accommodate for rotational movements about the bridge’s transverse axis thanks to a pin to which the upper part (fixed to the superstructure) and the lower part (fixed to the substructure) are attached.
- Rocker bearings: They allow translational movements in the longitudinal direction in the form of rocking thanks to their curved lower surface. These bearings also often feature a pin to allow rotational movements.
- Spherical and cylindrical bearings: These bearings rely on curved surfaces that allow rotational movements about the horizontal axes while preventing translations along any of the three main axes of the bridge. The upper part of the bearing has a concave curved surface and the lower part has a convex curved surface. Spherical bearings accommodate for rotations about both horizontal axes while cylindrical bearings only accommodate for rotations about one of the two axes.
- Roller bearings: They consist in one or several rollers that allow translational movements in the longitudinal direction and rotations about the transverse axis.
- Elastomeric bearings: These bearings are made of natural or synthetic rubber and take up both rotations and translations thanks to the deformation of an elastomer block. Unlike the above-mentioned bearings, they feature no moving part. They can be reinforced with steel or glass fibres.
- Pot bearings: They consist in a circular elastomer plate that is contained in a steel pot. The plate is held at the top by a steel piston and on the sides by a sealing ring. As the elastomer plate is

18
almost incompressible and has a great resistance to compression, pot bearings can support greater loads than their elastomeric counterparts. However, the only allow very little translational movement. For this reason, a sliding plate that accommodate for translations is always added to pot bearings.
- Disk bearings: Similar to the elastomeric bearings as they consist in a disk made of natural or synthetic rubber, disk bearings can only take up rotations with the disk itself. Translations are allowed with the addition of a sliding plate.
A sliding plate can be added on some of the types of bearings introduced above such as elastomeric or pot bearings. These then become sliding bearings which are the main focus of this thesis. This sliding mechanism consists of two stainless steel plates that slide relative to each other. In order to reduce the coefficient of friction, PTFE sheets that are placed between the two plates have been increasingly used over the last decades. The sliding movement is in principle bidirectional but can be restricted to a unidirectional movement by means of a guiding system (either central or lateral) that can be added to the sliding plate.
Designing codes for bearings that are used in Sweden and Europe are defined in the European standard (EN 1337-2:2005 - Structural Bearings - Part 2: Sliding elements) and (EN 1337-5:2005 - Structural bearings - Part 5: Pot bearings). These standards only deal with static and quasi-static loads: no indication is given regarding their design under dynamic loading.
3.2. Friction Friction denotes a force that resists the relative movement between two mechanical systems that
are in contact with each other. These two mechanical systems may be solid surfaces or fluid layers. In the frame of this thesis, the only phenomenon of friction between solid surfaces without lubricant, known as dry friction, is relevant. The study of friction is addressed by tribology, from the Greek word τριβος: “friction”.
Figure 3-1 – Drawings and pictures of the different types of bearings presented in this section (from theconstructor.org)

19
Dry friction has been theorized in the late 15th century by Leonardo da Vinci who established two laws of dry friction in his personal notebooks. These two laws were rediscovered independently in the late 17th century by Guillaume Amontons who added a third law in what is nowadays known as Amontons’ three laws of dry friction:
1. The force of friction is proportional to the load compressing the two surfaces against each other. 2. The force of friction is independent of the area of contact. 3. The magnitude of the force of kinetic friction is independent of the sliding velocity
3.2.1. Coulomb friction Charles-Augustin Coulomb formalized these laws of dry friction and developed in 1785 a model to
compute the force of friction known as Coulomb friction. The context in which the model is to be used needs to be clearly stated. With 𝑆1 and 𝑆2 being two surfaces in contact with each other at a point 𝐼, the sliding velocity of 𝑆1 versus 𝑆2 (resp. 𝑆2 versus 𝑆1) is defined as the difference of the velocity of point 𝐼 in surface 𝑆2 (resp. point 𝐼 in surface 𝑆1) and the velocity of point 𝐼 in surface 𝑆1 (resp. point 𝐼 in surface 𝑆2) as in equation (3-1):
{��1/2 = ��𝐼∈𝑆1 − ��𝐼∈𝑆2��2/1 = ��𝐼∈𝑆2 − ��𝐼∈𝑆1
(3-1)
Surface 𝑆2 (resp. 𝑆1) exerts a force on surface 𝑆1 (resp. 𝑆2) which is the reaction force of 𝑆2 on 𝑆1 (resp. the reaction force of 𝑆1 on 𝑆2), denoted ��1 (resp. ��2). This reaction force can be broken down into two components, one being normal to the common tangent plane to 𝑆1 and 𝑆2 – denoted ��1 (resp. ��2) – and the other being tangent to this same plane – denoted ��1 (resp. ��2). This is summarized in Figure 3-2 and equation (3-2).
3.2.1.1. Static friction
When the two surfaces 𝑆1 and 𝑆2 are not moving relatively to each other, i.e. when ��1/2 = ��2/1 =
0, friction takes the form of static friction. This is a phenomenon whose effects tend to prevent any relative movement. In that case, the force of friction ��𝑓,1 (resp. ��𝑓,2) acting on surface 𝑆1 (resp. 𝑆2) is
equal to the tangential reaction component ��1 (resp. ��2). On the one hand, the direction of these forces is opposite to the movement (of the surface on which they act) that would occur if they did not exist. On the other hand, their magnitude remains below a limit value 𝑇0. If this limit value is not exceeded, the system remains static.
{��1 = ��1 + ��1 acting on 𝑆1��2 = ��2 + ��2 acting on 𝑆2��2 = −��1
(3-2)

20
Figure 3-2 - Reaction forces as two surfaces 𝑆1 and 𝑆2 are brought to contact at a tangent point 𝐼
𝑇0 is therefore the maximum static friction force. According to Amontons’ first law of friction, its value is proportional to the magnitude of the normal reaction force ��1 (resp. ��2) as shown in equations (3-3). The coefficient of proportionality is known as the coefficient of static friction, denoted 𝜇𝑠.
{��𝑓,1 = ��1��𝑓,2 = ��2
‖��1‖ = ‖��2‖ ≤ 𝑇0 = 𝜇𝑠‖��1‖ = 𝜇𝑠‖��2‖
(3-3)
3.2.1.2. Kinetic friction
When the two surfaces 𝑆1 and 𝑆2 are moving relatively to each other, i.e. when ��1/2 = ��2/1 ≠ 0, friction takes the form of kinetic friction. This is a phenomenon whose effects tend to counteract the motion. In this case the force of friction ��𝑓,1 (resp. ��𝑓,2) acting on surface 𝑆1 (resp. 𝑆2) and the sliding
velocity ��1/2 (resp. ��2/1) have opposite directions. The tangential reaction component ��1 (resp. ��2) is
no longer necessarily related to the frictional force ��𝑓,1 (resp. ��𝑓,2). As stated in Amontons’ first law of
dry friction, the magnitude of the force of kinetic friction ��𝑓,1 (resp. ��𝑓,2) is proportional to the
magnitude of the normal reaction force ��1 (resp. ��2) as shown in equations (3-4). The coefficient of proportionality is here known as the coefficient of kinetic friction, denoted 𝜇𝑘.
{dir (��𝑓,1) = dir (��1/2)
dir (��𝑓,2) = dir (��2/1)‖��𝑓,1‖ = ‖��𝑓,2‖ = 𝜇𝑘‖��1‖ = 𝜇𝑘‖��2‖
(3-4)

21
In equation (3-4), dir (��) = ��/‖��‖ is the unit direction vector related to a given vector ��. When the motion is purely unidirectional, equations (3-4) are equivalent to equations (3-5) below where sgn(𝑥) is the sign of a given value 𝑥 (see equation III-8):
{𝐹𝑓,1 = −𝜇𝑘𝑁1sgn(𝑣1/2) = −𝐹𝑓,2𝐹𝑓,2 = −𝜇𝑘𝑁2sgn(𝑣2/1) = −𝐹𝑓,1
(3-5)
3.2.2. Hysteretic aspect of friction The previous section on Coulomb friction (section 3.2.1) introduces two regimes in the frictional
behaviour of two surfaces that are sliding against each other. Each transition from one regime to another requires a specific condition to be fulfilled. On the one hand, the transition from static to kinetic friction requires a limit force to be overcome. In that sense, this transition depends on a threshold condition and induces therefore abrupt changes in the motion of mechanical systems undergoing friction. On the other hand, the transition from kinetic to static friction requires the sliding velocity to reach zero. No threshold phenomenon is at stake for this transition. The asymmetry of these two transitions induces hysteresis phenomena: the transition from one state to another depends on the direction in which this transition takes place.
3.3. The Bouc-Wen model Modelling the mechanical behaviour of pot bearings under a dynamic load requires being able to
model its hysteretic behaviour. In mechanical systems, a first kind of hysteresis patterns can develop with a dynamic lag between the input force or displacement and the observed output. The magnitude of the phenomenon depends on the rate of the input. This kind of hysteresis is thus qualified as rate-dependent and occur in linear systems. It cannot be modelled with simple models such as the Kelvin-Voigt model that consists in an elastic spring and a viscous damper placed in parallel.
3.3.1. Original model for unidirectional systems The original Bouc-Wen model, as written in equations (3-6) and (3-7), accounts for hysteresis
phenomena in mechanical systems (Bouc, 1969), (Wen, 1976). Hysteresis is considered by the means of a dimensionless internal variable 𝑧(𝑡) that is governed by a non-linear, ordinary differential equation. The restoring force 𝐹𝑟(𝑡) of a single-degree-of-freedom system is expressed by the Bouc-Wen model as:
𝐹𝑟(𝑡) = 𝑎𝑘0𝑢(𝑡) + (1 − 𝑎)𝑘0𝐷𝑧(𝑡) (3-6)

22
In equation (3-6), 𝑢(𝑡) is the displacement, 𝑎 = 𝑘𝑓/𝑘0 is the ratio of the post-yielding to pre-yielding stiffness and 𝐷 is the yield displacement. 𝑧(𝑡) is a dimensionless hysteretic variable whose rate of change over time follows the differential equation (3-7) below.
��(𝑡) =1𝐷[𝐴 − |𝑧|𝑛(𝛽 + 𝛾 sgn(��𝑧))] ⋅ ��(𝑡) (3-7)
The expression for the restoring force (3-6) exhibits an elastic post-yielding part and a hysteretic part which can be respectively represented by a spring and a hysteretic component as in Figure 3-3. In equation (3-7), 𝐴, 𝛽, 𝛾 and 𝑛 are the dimensionless parameters of the model. sgn is the sign function defined in equation (3-8):
{sgn(𝑥) = −1 if 𝑥 < 0sgn(𝑥) = 0 if 𝑥 = 0sgn(𝑥) = +1 if 𝑥 > 0
(3-8)
Hysteresis loops may occur under a dynamic force load which can be denoted 𝜁(𝑡). The equation of motion of a single-degree-of-freedom (SDOF) system including the Bouc-Wen model can then be written as:
𝑚��(𝑡) + 𝑐��(𝑡) + 𝐹𝑟(𝑡) = 𝜁(𝑡) (3-9)
The parameters 𝛽 and 𝛾 that appear in equation (3-7) influence the shape of hysteretic loops (cf. Figure 3-4) while the parameter 𝑛 influences the length of the transition between the pre-yielding and post-yielding parts of the curve. A suggestion made by Constantinou and Adnane to reduce the formulation of the model, including well-defined properties (Constantinou & Adnane, 1987) is used in this thesis:
{ 𝐴 = 1𝛽 + 𝛾 = 1 (3-10)
This constrains the intern hysteretic variable to oscillate between −1 and +1. Indeed, by setting �� = 0 in equation (3-7), one gets the following extreme values:
𝑧𝑒𝑥𝑡 = ±(
𝐴𝛽 + 𝛾
)1𝑛= ±1 (3-11)

23
Figure 3-3 – The Bouc-Wen model: Equivalent mechanical model and initial force-displacement response
Figure 3-4 - Influence of 𝛽 and 𝛾 on the shape of hysteresis loops produced by the Bouc-Wen model for a sinusoidal displacement load having 1m amplitude (using 𝑎 = 0.1, 𝐴 = 1, 𝑛 = 2, 𝑘0 = 1 𝑁/𝑚 and 𝐷 = 0.5 𝑚)

24
3.3.2. Using the Bouc-Wen model as a model for friction The Bouc-Wen model is able to describe the behaviour of a wide range of hysteretic systems and
can be used to account for steel-PTFE friction (cf. section 2.1.2). This section presents the friction model introduced by Constantinou et al. (Constantinou, Mokha, & Reinhorn, 1990) and implemented in the previously developed sliding bearing element (Ülker-Kaustell, 2013), (Ülker-Kaustell, 2017). In the case of sliding bearings, the displacement, velocity and acceleration values to be used in the Bouc-
Wen model are relative (difference) values between the steel and the PTFE surface. Indeed, none of the surface is static. An arbitrary choice is to work with the difference between steel motion and PTFE motion defined in equation (3-12):
{𝑢(𝑡) = 𝑢𝑠𝑡𝑒𝑒𝑙(𝑡) − 𝑢𝑃𝑇𝐹𝐸(𝑡)��(𝑡) = ��𝑠𝑡𝑒𝑒𝑙(𝑡) − ��𝑃𝑇𝐹𝐸(𝑡)��(𝑡) = ��𝑠𝑡𝑒𝑒𝑙(𝑡) − ��𝑃𝑇𝐹𝐸(𝑡)
(3-12)
As explained in section 3.2, the frictional force acting in one of the two surfaces and the sliding velocity related to this same surface (i.e. which takes this surface’s velocity as positive) have opposite directions. In our case, there are two surfaces and thus two definitions for the interfacial frictional force. While the force magnitude at the steel-PTFE interface is uniquely defined, its direction is ambiguous since it depends on how the relative velocity is calculated. Using the definition in equation (II.6), the sign of the frictional force in unidirectional motion is opposite to the sign of the sliding velocity: sgn(𝐹𝑓) = −sgn(��). But one could also have sgn(𝐹𝑓) = sgn(��) if one chooses to calculate the relative motion between steel and PTFE in the other way. In order to stay consistent with the sign of the Bouc-Wen restoring force used in equation (3-9), a second arbitrary choice is to keep the second option: sgn(𝐹𝑓) = sgn(��), although it is not consistent with equation (3-12). With these choices, the expression of the kinetic unidirectional frictional force (cf. equations (3-4) and (3-5)) is:
𝐹𝑓(𝑡) = 𝜇𝑝𝐴𝑃𝑇𝐹𝐸 sgn(��(𝑡)) (3-13)
In equation (3-13), 𝜇 is the coefficient of friction, 𝑝 the contact pressure at the steel-PTFE interface and 𝐴𝑃𝑇𝐹𝐸 is the contact area. The magnitude of the frictional force is smaller in the case of static friction (cf. equation (3-3)). In order to account for both static and kinetic friction, a first step towards the description of steel-PTFE friction with the Bouc-Wen model is to substitute the sgn(��) factor in equation (3-13) with the hysteretic variable 𝑧 defined in equation (3-6):
𝐹𝑓(𝑡) = 𝜇𝑝𝐴𝑃𝑇𝐹𝐸𝑧(𝑡) (3-14)
In equation (3-14), 𝑧 is regarded as a “continuous equivalent” of sgn(��). This hysteretic variable takes its values in the range [−1, 1]. On the one hand, when 𝑧 = ±1, a kinetic frictional force is described as in equation (3-13): there is a sliding motion between steel and PTFE surfaces. On the other

25
hand, when |𝑧| < 1, the force takes the form of a static frictional force as its magnitude is smaller: there is no relative motion between the two surfaces (Constantinou, Mokha, & Reinhorn, 1990).
In order to apply the Bouc-Wen model to a friction model, the frictional force from equation (3-14) and the restoring force from equation (3-6) must have equal values. Since friction is essentially a non-linear phenomenon, the purely elastic part of the Bouc-Wen restoring force should be negligible with respect to the hysteretic part, this gives the following condition on the coefficient 𝑎:
𝑎 ≪ 1 (3-15)
Which is equivalent to:
𝑘𝑓 ≪ 𝑘0 (3-16)
In the light of this consideration, the Bouc-Wen restoring force can be approximated as in the following expression:
𝐹𝑟(𝑡) ≈ 𝑘0𝐷𝑧(𝑡) (3-17)
From equations (3-14) and (3-17), the most natural way to include the dependency of the coefficient of friction on the contact temperature, the sliding temperature and the contact pressure in the Bouc-Wen model is to set equal to two following quantities:
𝜇𝑝𝐴𝑃𝑇𝐹𝐸 = 𝑘0𝐷 (3-18)
The three parameters that characterize steel-PTFE friction – the coefficient of friction, the contact pressure and the contact area – can thus be included into the Bouc-Wen model by defining an equivalent yield displacement that depends on these three quantities:
𝐷 =𝜇𝑝𝐴𝑃𝑇𝐹𝐸𝑘0
(3-19)
The steel-PTFE friction model based on the Bouc-Wen model described in this section is being used in the current sliding bearing finite element developed by Ülker-Kaustell (Ülker-Kaustell, 2013), (Ülker-Kaustell, 2017).
3.3.3. Extension to bidirectional systems Rather than a simple unidirectional problem, friction on a bearing sliding plate occurs with
bidirectional motion, restoring force and dynamic load on the 𝑥 − 𝑦 plane:

26
��(𝑡) = (
𝑢𝑥(𝑡)𝑢𝑦(𝑡)
) , ��𝑟(𝑡) = (𝐹𝑟,𝑥(𝑡)𝐹𝑟,𝑦(𝑡)
) , 𝜁(𝑡) = (𝜁𝑥(𝑡)𝜁𝑦(𝑡)
) (3-20)
When it comes to modelling hysteretic systems vibrating in a two-dimensional space, the classical Bouc-Wen model is not sufficient. A bidirectional version of the Bouc-Wen model, sometimes called the Park-Wen model (Park, Wen, & Ang, 1986), is able to model hysteretic phenomena for mechanical systems that follow the equation of motion (3-21):
𝑴 ⋅ ��(𝑡) + 𝑪 ⋅ ��(𝑡) + ��𝑟(𝑡) = 𝜁(𝑡) (3-21)
As in the classical Bouc-Wen model, the expression of the restoring force (3-22) exhibits an elastic part and a hysteretic part.
��𝑟(𝑡) = 𝑎𝑘0��(𝑡) + (1 − 𝑎)𝐷𝑘0𝑧(𝑡) (3-22)
For this second part, two hysteretic internal variables 𝑧𝑥 and 𝑧𝑦 are introduced, accounting for the hysteretic behaviour along each axis of the plane:
𝑧(𝑡) = (
𝑧𝑥(𝑡)𝑧𝑦(𝑡)
) (3-23)
The rate of change over time of the hysteretic parameters vector 𝑧 is governed by the following system of non-linear, ordinary differential equations, which is a generalization of the 1-dimensional case with the parameter 𝑛 having the value 𝑛 = 2 (Park, Wen, & Ang, 1986):
(��𝑥��𝑦) =
1𝐷 (
𝐴 − 𝑧𝑥2(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥)) −𝑧𝑥𝑧𝑦(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))−𝑧𝑥𝑧𝑦(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥)) 𝐴 − 𝑧𝑦2(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))
) ⋅ (��𝑥��𝑦) (3-24)
The off-diagonal entries in the matrix appearing in equation (3-24) account for the coupling between 𝑧𝑥 and 𝑧𝑦. Thus, restoring force components 𝐹𝑟,𝑥 and 𝐹𝑟,𝑦 are interdependent as their values depend respectively on 𝑧𝑥 and 𝑧𝑦 according to equation (3-22). Equation (3-24) is rewritten in a synthetic vector form in equation (3-25) in which ⊗ is the tensor product, ⊙ is the Hadamard product (element-wise product) and ⋅ is the regular dot product.
�� =1𝐷 [𝐴�� − [𝑧 ⊗ (𝛽𝑧 + 𝛾𝑧 ⊙ sgn(�� ⊙ 𝑧))] ⋅ ��] (3-25)
Under the assumption that the movement in the 𝑥 − 𝑦 plane is unidirectional with a given angle 𝜃 to the 𝑥-axis – i.e. when the displacement components and the hysteretic intern variables from equation (3-20) and (3-23) are expressed as in equation (3-26) – the differential equation (3-25) governing the evolution of the intern variables is equivalent to equation (3-7) with 𝑛 = 2.

27
𝑢𝑥(𝑡) = 𝑢(𝑡) cos 𝜃 , 𝑢𝑦(𝑡) = 𝑢(𝑡) sin𝜃 , 𝑧𝑥(𝑡) = 𝑧(𝑡) cos𝜃 , 𝑧𝑦(𝑡) = 𝑧(𝑡) sin𝜃 (3-26)
Just like in the unidirectional case, the Bouc-Wen model can be applied to bidirectional friction on a bearing sliding plate as Constantinou and his co-workers showed (Constantinou, Mokha, & Reinhorn, 1990). Regarding the definition of the relative movement between steel and PTFE surfaces, the same choice as in the unidirectional case can be made: steel motion is counted as positive and PTFE motion as negative.
Depending on whether friction in the steel plate or friction in the PTFE plate is considered, the
definition of the interface frictional force is here again ambiguous: its direction can be either dir (��𝑓) =
dir (��) or dir (��𝑓) = −dir (��) (cf. equation (3-4)). One can actually note that the “orientation” of the vector is kept in both definitions while the directions along this “orientation” are opposite. In order to be consistent with the direction of the Bouc-Wen restoring force vector ��𝑟, the following definition for the frictional force in the kinetic case can be used:
��𝑓(𝑡) = 𝜇𝑝𝐴𝑃𝑇𝐹𝐸
��(𝑡)‖��(𝑡)‖
(3-27)
This definition can also be generalized to include both static and kinetic friction as in the unidirectional case:
��𝑓(𝑡) = 𝜇𝑝𝐴𝑃𝑇𝐹𝐸𝑧(𝑡) (3-28)
In equation (3-28), ��𝑓 is a kinetic friction force (there is sliding between steel and PTFE) when
‖𝑧‖ = 1 and ��𝑓 is a static friction force (there is no relative motion on the sliding plate) when ‖𝑧‖ < 1 (Constantinou, Mokha, & Reinhorn, 1990). This friction force is finally identified with the bidirectional Bouc-Wen restoring force by using the equivalent yield displacement defined in equation (3-19).
3.4. Contact interface heating with respect to friction Thanks to frictional mechanisms, steel-PTFE contact interfaces can counteract vibrations due to
passing trains on bridges equipped with bearings featuring such interfaces. From an energy perspective, this counteraction results from the dissipation of energy, caused by the friction between the steel and the PTFE. The dissipated energy is turned into heat which may result in a substantial contact temperature increase. As this increase may influence the frictional properties, it is interesting to be able to quantify it.
The energy dissipated through friction in sliding bearings creates a heat flux that increases the surface temperature of both steel and PTFE. With the assumption that the heat flux densities are

28
equally distributed over the whole surfaces, heat is transferred into both materials with conduction. Thus, in order to study conduction in steel and PTFE, both materials are assumed to be semi-infinite bodies and the equation is solved thanks to the use of Laplace transforms (Carslaw & Jaeger, 1947). For each material, the temperature profile along the depth coordinate 𝑧 resulting from an applied flux at 𝑧 = 0 is to be determined.
3.4.1. Surface heating of semi-infinite bodies The fundamental law for heat conduction is Fourier’s law (3-29). It applies to isotropic and
homogeneous materials and relates the heat flux ��(𝑧) to the temperature gradient in the semi-infinite body. The notation used in equation (3-29) for the gradient operator accounts for the tensor order of its output.
�� = −𝜆grad (𝑇) = −𝜆𝜕𝑇𝜕𝑧𝑒𝑧 (3-29)
The proportionality coefficient 𝜆 that appears in equation (3-29) is the thermal conductivity of the studied body. It is expressed in W/m/K with SI units. The evolution of temperature over time 𝑡 and depth 𝑧 in the semi-infinite body is given by the heat equation:
𝜌𝑐𝜕𝑇𝜕𝑡+ div(��) = 0 (3-30)
In equation (3-30), 𝜌 is the volumetric mass density (unit: kg/m3) and 𝑐 is the specific heat capacity (unit: J/K/kg). If the thermal conductivity 𝜆 is not dependent on the temperature, time nor depth, the heat equation can be written in the form of a diffusion equation:
𝜕𝑇𝜕𝑡= 𝐷
𝜕2𝑇𝜕𝑧2
(3-31)
With 𝐷 = 𝜆𝜌𝑐
being the thermal diffusivity (unit: m2/s). The goal is to solve this equation in order
to determine the temperature increase on the semi-infinite body’s surface (at 𝑧 = 0). In the case of steel and PTFE near the contact interface, there is an initial condition on the surface temperature (which is supposed to be equal to the initial contact temperature) and a limit condition on the heat flux acting on the surface:
{𝑇(𝑧 = 0, 𝑡 = 0) = 𝑇0
−𝜆𝜕𝑇𝜕𝑧|𝑧=0
= 𝜑0 (3-32)

29
The heat equation can be solved using Laplace transform 𝑇∗(𝑧, 𝑝) = ℒ{𝑇(𝑧, 𝑡)} which gives for the time derivative:
ℒ {𝜕𝑇𝜕𝑡}
= 𝑝𝑇∗(𝑧, 𝑝) − 𝑇(𝑧, 𝑡 = 0) (3-33)
In order to make calculations simpler, we can work with Θ(𝑧, 𝑡) = 𝑇(𝑧, 𝑡) − 𝑇(𝑧, 𝑡 = 0) and its
Laplace transform Θ∗(𝑧, 𝑝) = ℒ{Θ(𝑧, 𝑡)} = 𝑇∗(𝑧, 𝑝) − 𝑇(𝑧,𝑡=0)𝑝
. The time derivative becomes:
ℒ {𝜕Θ𝜕𝑡 }
= 𝑝Θ∗(𝑧, 𝑝) − Θ(𝑧, 𝑡 = 0) = 𝑝Θ∗(𝑧, 𝑝) (3-34)
Therefore, the equation to be solved in the Laplace domain for each 𝑝 value is:
𝑑2Θ∗(𝑧, 𝑝)𝑑𝑧2
−𝑝𝐷Θ∗(𝑧, 𝑝) = 0 (3-35)
With the limit conditions:
{Θ(𝑧 = 0, 𝑡 = 0) = 0
−𝜆𝜕Θ𝜕𝑧|𝑧=0
= 𝜑0⟹ {
Θ∗(𝑧 = 0, 𝑝 → +∞) = 0
−𝜆𝑑Θ∗
𝑑𝑧 |𝑧=0=𝜑0𝑝
(3-36)
This is a classical second order differential equation whose solution is:
Θ∗(𝑧, 𝑝) = 𝐴(𝑝) exp (−√
𝑝𝐷𝑧) + 𝐵(𝑝) exp(√
𝑝𝐷𝑧) (3-37)
With 𝐴 and 𝐵 two functions of 𝑝 to be determined. From a physical perspective, Θ∗ cannot tend to infinite as 𝑧 tends to infinite so 𝐵 = 0. The second limit condition gives:
−𝜆
𝜕Θ𝜕𝑧|𝑧=0
= 𝜆𝐴(𝑝)√𝑝𝐷=𝜑0𝑝⟺ 𝐴(𝑝) =
𝜑0𝑝𝜆√𝐷𝑝
(3-38)
And thus:
Θ∗(𝑧, 𝑝) =
𝜑0𝑝𝜆√𝐷𝑝exp(−√
𝑝𝐷𝑧) (3-39)

30
By applying an inverse Laplace transform, the temperature increase Θ inside the semi-infinite body is worth:
Θ(𝑧, 𝑡) =
𝜑0𝜆 [
2√𝐷𝑡𝜋exp(
−𝑧2
4𝐷𝑡)− 𝑧 erfc (
𝑧2√𝐷𝑡
)] (3-40)
In equation (3-40), erfc is the complementary error function (cf. Figure 3-5) defined by:
Figure 3-5 - The error function erf and its complementary erfc
erfc(𝑢) = 1 − erf(𝑢) = 1 −
2√𝜋
∫ 𝑒−𝜉2𝑑𝜉𝑢
0 (3-41)
The temperature increase due to friction on the surface is obtained by setting 𝑧 = 0 in the expression for the temperature increase inside the semi-infinite body (3-40):
Δ𝑇𝑠(𝑡) = 𝑇𝑠(𝑡) − 𝑇0 =
2𝜑0𝜆√𝐷𝑡𝜋
(3-42)
Equation (3-42) can be rewritten using the thermal effusivity 𝑏 = √𝜆𝜌𝑐 = 𝜆/√𝐷 (unit: J/K/m2/s1/2). With this thermal parameter, the surface temperature increase when a heat flux is applied on the surface is given in equation (3-43):

31
Δ𝑇𝑠(𝑡) = 𝑇𝑠(𝑡) − 𝑇0 =
2𝜑0𝑏√𝑡𝜋
(3-43)
3.4.2. Application to contact interface heating According to the work-energy theorem, the change of mechanical energy for a moving system is
equal to the work of non-conservative forces during this movement. Thus, over a time increment 𝑑𝑡, the amount of dissipated energy 𝐸𝐷 under a frictional force ��𝑓 and a relative displacement 𝛿�� at the
steel-PTFE interface is equal to the work of ��𝑓 along 𝛿��:
𝐸𝐷 = ��𝑓 ⋅ 𝛿�� (3-44)
We can make the assumption that all this dissipated energy is turned into heat at the interface, which means that the amount of heat gained at the interface is worth:
𝑄 = 𝐸𝐷 = ��𝑓 ⋅ 𝛿�� (3-45)
This heat 𝑄 results in a heat flux Φ that can be broken down into a heat flux Φ1 that acts towards the steel surface and a heat flux Φ2 that acts towards the PTFE surface. The share of heat taken up by each of those two surfaces will be determined later. The magnitude of the overall flux is worth:
Φ =𝜕𝑄𝜕𝑡
= ��𝑓 ⋅ �� (3-46)
In equation (3-46), �� is the relative velocity between the two surfaces. Since there are two different definitions for 𝐹𝑓 and �� depending on which surface of the interface is considered (cf. section 3.2), they are here defined such that they are in the same direction. The surface heat flux density 𝜑 corresponding to this heat flux is:
𝜑 =
𝜕Φ𝜕𝑆
=��𝑓 ⋅ ��𝐴𝑃𝑇𝐹𝐸
(3-47)
In equation (3-47), 𝐴𝑃𝑇𝐹𝐸 is the contact area. Heat flux density �� can be broken into fluxes 𝜑1 and 𝜑2 related to fluxes Φ1 and Φ2 . As explained in section 3.4.1, with the initial temperature on steel and PTFE surfaces being 𝑇0, the heat fluxes densities 𝜑1 and 𝜑2 increase each surface temperature according to the following expressions (derived from equation (3-43)):

32
Δ𝑇1,𝑠(𝑡) = 𝑇1,𝑠(𝑡) − 𝑇0 =
2𝜑1𝑏𝑠𝑡𝑒𝑒𝑙
√𝑑𝑡𝜋
and Δ𝑇2,𝑠(𝑡) = 𝑇2,𝑠(𝑡) − 𝑇0 =2𝜑2𝑏𝑃𝑇𝐹𝐸
√𝑑𝑡𝜋
(3-48)
Whether the PTFE sliding plate and the surrounding steel body can be considered as semi-infinite bodies, as assumed in equation (3-43), is discussed in section 6.3.2. In equation (3-48), 𝑏𝑠𝑡𝑒𝑒𝑙 and 𝑏𝑃𝑇𝐹𝐸 are the thermal effusivities of steel and PTFE. The thermal effusivity of a material is a measure of its ability to exchange heat with its environment. The share of the heat flux 𝜑 taken up by steel on the one hand and PTFE on the other hand is therefore proportional to their respective effusivities:
𝜑1 =𝑏𝑠𝑡𝑒𝑒𝑙
𝑏𝑠𝑡𝑒𝑒𝑙 + 𝑏𝑃𝑇𝐹𝐸𝜑 and 𝜑2 =
𝑏𝑃𝑇𝐹𝐸𝑏𝑠𝑡𝑒𝑒𝑙 + 𝑏𝑃𝑇𝐹𝐸
𝜑 (3-49)
Moreover, when two semi-infinite bodies are brought to contact, their contact temperature is the weighted mean of the two surface temperatures with their respective effusivities acting as weights:
𝑇𝑐(𝑡) =
𝑏𝑠𝑡𝑒𝑒𝑙𝑇1,𝑠(𝑡) + 𝑏𝑃𝑇𝐹𝐸𝑇2,𝑠(𝑡)𝑏𝑠𝑡𝑒𝑒𝑙 + 𝑏𝑃𝑇𝐹𝐸
(3-50)
Note: This expression is valid under the assumption that both surfaces are perfectly smooth. Combining equations (3-48), (3-49) and (3-50), we get the contact temperature increase:
Δ𝑇𝑐(𝑡) = 𝑇𝑐(𝑡) − 𝑇0 =
2𝜑𝑏𝑠𝑡𝑒𝑒𝑙 + 𝑏𝑃𝑇𝐹𝐸
√𝑑𝑡𝜋
(3-51)
And 𝑇1,𝑠 = 𝑇2,𝑠 = 𝑇𝑐. Using the expression established for the surface heat flux density 𝜑 (3-47), this gives finally:
Δ𝑇𝑐(𝑡) = 𝑇𝑐(𝑡) − 𝑇0 =
2(��𝑓 ⋅ ��)𝐴𝑃𝑇𝐹𝐸(𝑏𝑠𝑡𝑒𝑒𝑙 + 𝑏𝑃𝑇𝐹𝐸)
√𝑑𝑡𝜋
(3-52)
3.5. The Finite Element Method The Finite Element Method (FEM) enables the approximate solution of static and dynamic
mechanical problems featuring partial differential equations (PDE). Such problems are often too complex, if not impossible, to solve analytically. In that sense, this method is ideally suited for calculating the dynamic response of a bridge following the passage of a train or for analysing the resonance modes of a bridge. The following notions on the FEM enable an understanding of the context in which the sliding bearing finite element discussed in this thesis is used.

33
3.5.1. General principle The Finite Element Method is based on the discretization of a domain Ω on which one wants to
solve a PDE problem into finite elements and nodes. For mechanical problems, as the ones discussed in this thesis, FEM enables to find an approximate value of the displacement field ��(𝑀) at any point 𝑀 in Ω resulting from imposed displacement ��𝑑 on edges of Ω denoted 𝜕Ω𝐷 and imposed forces ��𝑑 on edges of Ω denoted 𝜕Ω𝑁. Each edge point can either have an imposed displacement (which is called a Dirichlet condition) or an imposed force (Neumann condition). The approximate displacement field at each point of the domain is determined through the computation of its value 𝑢𝑖 at each node 𝑖 and interpolation between nodes using nodal form functions 𝝓𝒊:
��(𝑀) =∑𝝓𝒊(𝑀) ⋅ ��𝑖
𝑁
𝑖=1
(3-53)
Other relevant mechanical variables such as forces, strains and stresses can also be approximately determined in the whole domain using the output displacement field ��(𝑀) and finite elements formulation. For dynamic problems, the time scope is split into time increments that should be as small as possible. Nodal displacements are computed at each time increment, thus enabling the definition of nodal velocities ��𝑖(𝑡) and accelerations ��𝑖(𝑡) that are needed to solve the problem. The general velocity ��(𝑀, 𝑡) and acceleration ��(𝑀, 𝑡) can also be computed at each time increment using the nodal form functions.
3.5.2. Problem to solve and its variational formulation The determination of the displacement field ��(𝑀) inside a domain Ω, resulting from external
displacement 𝑢𝑑 applied on edge 𝜕Ω𝐷 and external forces 𝐹𝑑 applied on edge 𝜕Ω𝑁, is a continuum mechanics problem whose local formulation is given in equations (3-54):
{∀𝑀 ∈ Ω, div (��) + 𝑓 = 𝜌��∀𝑀 ∈ 𝜕Ω𝐷, �� = ��𝑑∀𝑀 ∈ 𝜕Ω𝑁, �� ⋅ �� = ��𝑑
(3-54)
In equations (3-54), ��(𝑀, 𝑡) is the stress tensor, 𝑓(𝑀, 𝑡) is the volumetric force density vector and �� is the vector normal to 𝜕Ω𝑁 at point 𝑀. Provided that the material behaviour law is linear, the first of these equations, which is a local formulation of Newton’s second law, is a linear equation as there is a linear relationship between �� and the strain tensor 𝜀 and furthermore between 𝜀 and the displacement field ��.

34
The matrix formulation of this problem (what is actually solved by FEM) is derived from a variational formulation (weak formulation) of equations (3-54). It states that for any kinematically admissible displacement field �� such that �� = 0 on 𝜕Ω𝐷 :
∫ ��
Ω⋅ (𝜌�� − div (��) − 𝑓) 𝑑𝑉 = 0 (3-55)
Equation (3-55) can be rewritten using vector analysis identities that will not be detailed here. These identities lead to:
∫(𝜌�� ⋅ �� + �� ∶ grads (��) − �� ⋅ 𝑓) 𝑑𝑉
Ω− ∫ �� ⋅ (�� ⋅ ��) 𝑑𝑆
∂Ω= 0 (3-56)
In equation (3-56), grads (��) = 12(grad (��) + grad 𝑇(��)) is the symmetrical gradient of ��. Limit
conditions from the two last equations in (3-54) must still be included into this variational formulation. The Neumann condition (on 𝜕Ω𝑁) can be directly included. On 𝜕Ω𝐷, the condition �� = 0 is used, thus giving:
∫(𝜌�� ⋅ �� + �� ∶ grads (��) − �� ⋅ 𝑓) 𝑑𝑉
Ω− ∫ �� ⋅ ��𝑑 𝑑𝑆
∂Ω𝑁= 0 (3-57)
Equation (3-57) is the equivalent variational formulation of the problem defined in equation (3-54). The Neumann condition (on applied forces) is included in this equation but the Dirichlet condition (on applied displacements) must be verified separately.
3.5.3. Matrix formulation As a in many numerical methods, solving a problem with FEM is equivalent to solving a system of
linear equations written in matrix form. The actual matrix system that is solved in the FEM process is derived from equation (3-57). The following writing convention is used:
- Matrices are written [ ⋅ ] - Column vectors are written { ⋅ } - Row vectors are written ⟨ ⋅ ⟩
The approximation (3-53) giving the displacement field ��(𝑀, 𝑡) (written here {𝑈}) from nodal displacements 𝑢𝑖 (𝑡) (assembled in vector {𝑑}) with shape functions 𝝓𝒊(𝑀) (assembled in matrix [𝑁]) is written:
{𝑈} = [𝑁]{𝑑} (3-58)

35
In FEM, the same shape functions are used for both the approximation of actual displacements �� from nodal displacements and the approximation of displacements �� (written here {𝛿𝑈}) used in the variational formulation. Virtual nodal displacements {𝛿𝑑} can be associated to these displacements. This gives the following equation:
{𝛿𝑈} = [𝑁]{𝛿𝑑} (3-59)
Strain and stress tensors 𝜀 and �� are treated as column vectors {𝜀} and {𝜎} with Voigt notation:
{{𝜀}𝑇 = ⟨𝜀𝑥𝑥 𝜀𝑦𝑦 𝜀𝑧𝑧 2𝜀𝑥𝑦 2𝜀𝑥𝑧 2𝜀𝑦𝑧⟩{𝜎}𝑇 = ⟨𝜎𝑥𝑥 𝜎𝑦𝑦 𝜎𝑧𝑧 𝜎𝑥𝑦 𝜎𝑥𝑧 𝜎𝑦𝑧⟩
(3-60)
And the material behaviour law (provided that it is linear) is accounted for with the constitutive matrix [𝐷]:
{𝜎} = [𝐷]{𝜀} (3-61)
The strain-displacement law 𝜀 = grads (��) can be written using a differential operator matrix [𝜕] corresponding to the symmetrical gradient:
{𝜀} = [𝜕]{𝑈} (3-62)
In equation (3-57), the term �� ∶ grads (��) can be written using the material behaviour law (3-61) along with equation (3-59) and matrix [𝜕] under the following form:
{𝛿𝑑}𝑇[𝐵]𝑇[𝐷][𝐵]{𝑑} with [𝐵] = [𝜕][𝑁] (3-63)
By using matrices defined in equations (3-58) to (3-63) along with vector {𝑓} (corresponding to 𝑓) and vector {𝐹𝑑} (corresponding to ��𝑑), the variational formulation of the problem (3-57) can be rewritten in matrix form:
{𝛿𝑑}𝑇 ∫(𝜌[𝑁]𝑇[𝑁]{��} + [𝐵]𝑇[𝐷][𝐵]{𝑑} − [𝑁]𝑇{𝑓}) 𝑑𝑉
Ω= {𝛿𝑑}𝑇 ∫ [𝑁]𝑇{𝐹𝑑} 𝑑𝑆
𝜕Ω𝑁 (3-64)
Equation (3-57) is valid for any kinematically admissible displacement field �� such that �� = 0 on 𝜕Ω𝐷 and so is equation (3-64) with {𝛿𝑑}𝑇. This factor can therefore be taken off and the equation can be written under the following form:
[𝑀]{��} + [𝐾]{𝑑} = {𝐹} (3-65)

36
In this matrix formulation of the problem (3-65) solved by FEM codes, the following matrices are defined:
{
Mass matrix: [𝑀] = ∫𝜌[𝑁]𝑇[𝑁] 𝑑𝑉
Ω
Stiffness matrix: [𝐾] = ∫ [𝐵]𝑇[𝐷][𝐵] 𝑑𝑉
Ω
Force vector: {𝐹} = ∫ [𝑁]𝑇{𝑓} 𝑑𝑉
Ω+ ∫ [𝑁]𝑇{𝐹𝑑} 𝑑𝑆
∂ΩN
(3-66)
In practice, those three matrices are determined for each element and then assembled to form the overall system of equations to solve. The mass matrix as defined in equation (3-66) is called a consistent mass matrix. Other definitions exist such as lumped mass matrices or HRZ mass matrices. One may also want to include damping in the formulation of a finite element. To do so several methods exist. Damping can either be included in the constitutive matrix [𝐷] by upgrading it to a complex matrix [��] with a loss factor 𝜂:
[��] = (1 + 𝑖𝜂)[𝐷] (3-67)
Or damping can be modelled by adding a damping matrix [𝐶] to the matrix equation of motion (3-65):
[𝑀]{��} + [𝐶]{��} + [𝐾]{𝑑} = {𝐹} (3-68)
The most common models used for the damping matrix are modal damping and Rayleigh damping which used in this thesis for beam elements. Rayleigh damping consists in expressing the damping matrix [𝐶] as a linear combination of the mass matrix [𝑀] and the stiffness matrix [𝐾]:
[𝐶] = 𝛼[𝑀] + 𝛽[𝐾] (3-69)

37
4. Method
4.1. Existing user-defined finite element based on the Bouc-Wen model
This section introduces the sliding bearing finite element as it was before the beginning of this thesis work. Its implementation as a user-defined element in the commercial FEM software Abaqus is explained in detail. In Abaqus, user-defined elements consist in subroutines written in the programming language Fortran. Thus, this section explains how the Bouc-Wen model, its adaptation to the unidirectional steel-PTFE friction model and the model for evaluating the coefficient of friction are implemented in order to operate in a numeric environment.
4.1.1. User-defined elements in Abaqus In addition to the classic finite elements that it contains by default, Abaqus allows users to create
their own elements through its “user-defined element” functionality. Such elements make it possible to implement uncommon or complex mechanical behaviours such as non-linear behaviours. These elements are defined as Fortran subroutines that are called by Abaqus during simulations in which they are involved.
4.1.1.1. Operation principle
The definition of a user-defined element is made in a Fortran code to be included when a simulation is launched. Like any finite element, the user-defined element requires properties that must also be specified before launching the simulation. In this thesis, the sliding bearing finite element is always used in dynamic calculations. In such analyses, Abaqus calls the Fortran code at each time increment. At each call, the code takes the element’s nodal displacements, velocities and accelerations as an input. These nodal displacements (and their time derivatives) are then processed by the Fortran subroutine in order to compute the element’s contribution to the overall system of equations for the current time increment (cf. section 4.1.1.2). This processing may require additional variables that depend on previous increments. To access these variables, they are gathered in a “solution-dependent variables” vector {𝑆𝐷𝑉} at the end of an increment. This vector is then given back to the Fortran code as an input for the next time increment. This operation principle is summarized in Figure 4-1.

38
Figure 4-1 - Operation of an Abaqus user-defined element
4.1.1.2. Contribution of the element to the overall system of equations
At each time increment, the Fortran code of a user-defined element should give a matrix [𝐴] and a right-hand side vector {𝑅𝐻𝑆} as outputs. These are the contribution of the element (defined in its own coordinate system) to the overall system of equations. This contribution is written in equation (4-1):
[𝐴]{𝑑} = {𝑅𝐻𝑆} (4-1)
In the case of a dynamic analysis, this equation (4-1) must be assimilated to the dynamic FEM equilibrium equation (3-68) which means that:
- [𝐴]{𝑑} must correspond to [𝑀]{��} + [𝐶]{��} + [𝐾]{𝑑} where [𝑀], [𝐶] and [𝐾] are the element’s mass, damping and stiffness matrices.
- {𝑅𝐻𝑆} must correspond to the element’s nodal force vector {𝐹}.

39
The calculation of the coefficients of the right-hand side matrix is therefore simple: it is just {𝑅𝐻𝑆} = {𝐹}. Things are more complicated when it comes to matrix [𝐴] where the time derivatives of the nodal displacement vector {𝑑} are involved. To deal with this issue, Abaqus gives the possibility to use the Hilber-Hughes-Taylor integration scheme by specifying three parameters 𝛼, 𝛽 and 𝛾 before launching a simulation. This integration scheme is a generalization of the Newmark integration scheme defined by the parameters 𝛽 and 𝛾. In this thesis, the parameter 𝛼 has been set to 0 in order to use the Newmark integration scheme only. With this scheme, the [𝐴] matrix is defined as:
[𝐴] =1
𝛽(Δ𝑡)2[𝑀] +
𝛾𝛽Δ𝑡
[𝐶] + [𝐾] (4-2)
In equation (4-2), Δ𝑡 is the current value for the time step between two increments. This integration scheme is implicit as the equilibrium (4-1) is performed with displacement values at the next time increment (at 𝑡 + Δ𝑡). The values for parameters 𝛽 and 𝛾 used in this thesis correspond to the so-called “average-acceleration” scheme:
𝛽 =14, 𝛾 =
12
(4-3)
4.1.2. Sliding bearing finite element specifications The sliding bearing finite element on which this thesis is based on has two nodes that are located
on either side of the steel-PTFE contact interface as shown in Figure 4-2. The sliding motion on that interface is thus the relative motion between the two nodes. Sliding per se occurs in the 𝑥 − 𝑦 plane while vertical loads are transferred to the bearing along the 𝑧-axis. The first node is the bottom node (part of the bearing that is fixed to the pier) while the second node is the top node (part of the bearing that is fixed to the superstructure).
Figure 4-2 - Conceptual view of the sliding bearing finite element on top of a pot bearing

40
With the nodal displacement vector {𝑑} containing the nodal displacements with respect to the following DOF and node order:
{𝑑} = ⟨𝑢𝑥,1 𝑢𝑦,1 𝑢𝑧,1 𝜃𝑥,1 𝜃𝑦,1 𝜃𝑧,1 𝑢𝑥,2 𝑢𝑦,2 𝑢𝑧,2 𝜃𝑥,2 𝜃𝑦,2 𝜃𝑧,2⟩𝑇 (4-4)
The sliding motion between the top part and the bottom part of the bearing is defined as follows:
{𝑢𝑥 = 𝑢𝑥,1 − 𝑢𝑥,2𝑢𝑦 = 𝑢𝑦,1 − 𝑢𝑦,2𝑢𝑧 = 𝑢𝑧,1 − 𝑢𝑧,2
, {𝜃𝑥 = 𝜃𝑥,1 − 𝜃𝑥,2𝜃𝑦 = 𝜃𝑦,1 − 𝜃𝑦,2𝜃𝑧 = 𝜃𝑧,1 − 𝜃𝑧,2
(4-5)
The element is defined with the following properties specified before launching a simulation and stored in the properties vector {𝑝𝑟𝑜𝑝}:
- Bouc-Wen model parameters: 𝑎, 𝑘0, 𝛽, 𝛾 and 𝑛. The value of parameter 𝐴 appearing in equation (3-7) is hard-coded to 𝐴 = 1, as suggested by (Constantinou & Adnane, 1987), see also section 3.3.1.
- Stiffness components: 𝑘𝑦, 𝑘𝑧, 𝑘𝑟𝑥, 𝑘𝑟𝑦 and 𝑘𝑟𝑧. The same values are used for both node 1 and
node 2. - Damping components: 𝑐𝑥, 𝑐𝑦, 𝑐𝑧, 𝑐𝑟𝑥 , 𝑐𝑟𝑦 and 𝑐𝑟𝑧 . The same values are used for both node 1 and
node 2. - Mass components: 𝑚𝑖,𝑥, 𝑚𝑖,𝑦, 𝑚𝑖,𝑧, 𝑚𝑖,𝑟𝑥, 𝑚𝑖,𝑟𝑦 and 𝑚𝑖,𝑟𝑧 . Different values are used for nodes
𝑖 = 1 and 𝑖 = 2. - Geometrical specification: the steel-PTFE contact area 𝐴𝑃𝑇𝐹𝐸.
While the components of the element’s stiffness matrix that are related to the 𝑥-translation depend on the time increment 𝑡 at which they are calculated, the components of mass and damping matrices are constant and are given in equations (4-6) to (4-9):
[𝑀𝑛𝑜𝑑𝑒,𝑖] =
[ 𝑚𝑖,𝑥 𝑚𝑖,𝑦 (0) 𝑚𝑖,𝑧 𝑚𝑖,𝑟𝑥 (0) 𝑚𝑖,𝑟𝑦 𝑚𝑖,𝑟𝑧]
(4-6)
[𝑀] = [
[𝑀𝑛𝑜𝑑𝑒,1] [0]6×6[0]6×6 [𝑀𝑛𝑜𝑑𝑒,2]
] (4-7)

41
[𝐶𝑛𝑜𝑑𝑒] =
[ 𝑐𝑥 𝑐𝑦 (0) 𝑐𝑧 𝑐𝑟𝑥 (0) 𝑐𝑟𝑦 𝑐𝑟𝑧]
(4-8)
[𝐶] = [[𝐶𝑛𝑜𝑑𝑒] −[𝐶𝑛𝑜𝑑𝑒]−[𝐶𝑛𝑜𝑑𝑒] [𝐶𝑛𝑜𝑑𝑒]
] (4-9)
4.1.3. Model for unidirectional steel-PTFE friction The model for unidirectional steel-PTFE friction used in the sliding bearing finite element is a
hysteretic friction model based on the Bouc-Wen model introduced in section 3.3 and has been developed in previous works (Ülker-Kaustell, 2013), (Ülker-Kaustell, 2017). It models friction along the 𝑥-axis, which should correspond to the longitudinal axis of the bridge if the element is placed in a FEM bridge model. This model is used at each time increment 𝑡 in order to compute the element’s contribution to the overall system of equations from its current nodal displacements {𝑑}, velocities {��} and accelerations {��} that are provided by Abaqus.
The frictional force on the steel-PTFE sliding interface is the Bouc-Wen restoring force 𝐹𝑟(𝑡) defined in equation (3-6). Using the element properties and the sliding motion components introduced in section 4.1.2, this force is calculated as:
𝐹𝑟(𝑡) = 𝑎𝑘0𝑢𝑥(𝑡) + (1 − 𝑎)𝑘0𝐷(𝑡)𝑧(𝑡) (4-10)
Equation (4-10) includes steel-PTFE friction parameters (coefficient of friction 𝜇(𝑡), contact pressure 𝑝(𝑡) and contact area 𝐴𝑃𝑇𝐹𝐸) within the equivalent yield displacement 𝐷(𝑡) defined in equation (3-19). The contact pressure used in this model results from vertical loads that are transferred to the bearing and is calculated as follows:
𝑝(𝑡) =
|𝑚1,𝑧��𝑧(𝑡) + 𝑐𝑧��𝑧(𝑡) + 𝑘𝑧𝑢𝑧(𝑡)|𝐴𝑃𝑇𝐹𝐸
(4-11)
In order to define the equivalent yield displacement value 𝐷(𝑡) (as defined in equation (3-19)) for the current time increment 𝑡, the coefficient of friction 𝜇(𝑡) is also needed. It is calculated using the model described in section 4.1.4. As shown in equation (4-10), the restoring force 𝐹𝑟(𝑡) depends also on the current value of the hysteretic variable 𝑧(𝑡). Its calculation is in fact the most delicate part of the processing done by the Fortran code at each time increment 𝑡 since it is governed by the following non-linear equation (adapted from equation (3-7)):

42
��(𝑡) = 𝑓𝐵𝑊(��𝑥(𝑡), 𝑧(𝑡))
��(𝑡) =1
𝐷(𝑡) [1 − |𝑧(𝑡)|𝑛(𝛽 + 𝛾 sgn(��𝑥(𝑡)𝑧(𝑡)))] ⋅ ��𝑥(𝑡)
(4-12)
The determination of the hysteretic variable 𝑧(𝑡) is made with the Newton-Raphson method, an iterative method that aims at finding the root of a given function 𝑓𝑁𝑅. An approximate value for the rate of change over time of the hysteretic variable ��(𝑡) in equation (4-12) is:
��(𝑡) = 𝑓𝐵𝑊(��𝑥(𝑡), 𝑧(𝑡)) ≈
𝑧(𝑡) − 𝑧𝑜𝑙𝑑(𝑡)Δ𝑡
(4-13)
In equation (4-13), 𝑧𝑜𝑙𝑑(𝑡) is the hysteretic variable value from the previous time increment. It is accessed by the Fortran code by storing it in the solution-dependent variables vector {𝑆𝐷𝑉} introduced in section 4.1.1. Δ𝑡 is the time step between two increments. From this equation, the current hysteretic variable value 𝑧(𝑡) can be expressed as:
𝑧(𝑡) ≈ 𝑧𝑜𝑙𝑑(𝑡) + Δ𝑡 ⋅ 𝑓𝐵𝑊(��𝑥(𝑡), 𝑧(𝑡)) (4-14)
And thus, finding the zero of the following function enables to determine the value of 𝑧(𝑡):
𝑓𝑁𝑅(��𝑥(𝑡), 𝑧(𝑡), 𝑧𝑜𝑙𝑑(𝑡)) = 𝑧(𝑡) − 𝑧𝑜𝑙𝑑(𝑡) − Δ𝑡 ⋅ 𝑓𝐵𝑊(��𝑥(𝑡), 𝑧(𝑡)) (4-15)
Conceptually, the Newton-Raphson method enables to iteratively find the root of a function from an initial guess by linearizing its curve around the current guess and taking the abscissa of the intersection of the resulting line with the abscissa axis. Here the initial guess for the current 𝑧(𝑡) value is the value from the previous increment: 𝑧𝑜𝑙𝑑(𝑡). The iteration scheme to find 𝑧(𝑡) is the following:
𝑧𝑘+1 = 𝑧𝑘 −
𝑓𝑁𝑅(��𝑥, 𝑧𝑘, 𝑧𝑜𝑙𝑑)𝜕𝑓𝑁𝑅𝜕𝑧 |𝑧=𝑧𝑘
(4-16)
With the iteration scheme shown in equation (4-16), the new 𝑧(𝑡) value is assumed to be found either when the absolute difference |𝑧𝑘+1 − 𝑧𝑘| is small enough according to a threshold criterion (convergence) or when a the algorithm has reached a maximum number of iterations. The partial derivative of the objective function with respect to 𝑧 appearing in equation (4-16) is:
𝜕𝑓𝑁𝑅𝜕𝑧
= 1 − Δ𝑡𝜕𝑓𝐵𝑊𝜕𝑧
= 1 +Δ𝑡𝐷𝑛 sgn(𝑧) |𝑧|𝑛−1(𝛽 + 𝛾 sgn(��𝑥𝑧))��𝑥 (4-17)

43
Once the current value for the hysteretic variable 𝑧(𝑡) is found, the contribution of steel-PTFE friction to the system of equation is included in the element’s stiffness matrix [𝐾] and the right-hand side vector {𝑅𝐻𝑆}. The stiffness matrix block corresponding to each node is indeed:
[𝐾𝑛𝑜𝑑𝑒] =
[ 𝑎𝑘0 + 𝑓𝐾(��𝑥, 𝑧) 0 0 0 0 0
𝑘𝑦 0 0 0 0 𝑘𝑧 0 0 0 𝑘𝑟𝑥 0 0 𝑠𝑦𝑚. 𝑘𝑟𝑦 0 𝑘𝑟𝑧]
(4-18)
And contributes to the element’s stiffness matrix as follows:
[𝐾] = [[𝐾𝑛𝑜𝑑𝑒] −[𝐾𝑛𝑜𝑑𝑒]−[𝐾𝑛𝑜𝑑𝑒] [𝐾𝑛𝑜𝑑𝑒]
] (4-19)
The function 𝑓𝐾 appearing in equation (4-18) denotes the Bouc-Wen tangent stiffness:
𝑓𝐾(��𝑥(𝑡), 𝑧(𝑡)) = (1 − 𝑎)𝑘0[1 − |𝑧(𝑡)|𝑛(𝛽 + 𝛾 sgn(��𝑥(𝑡)𝑧(𝑡)))] (4-20)
The contribution of the element to the right-hand side vector of the overall system of equations is:
{𝑅𝐻𝑆} =
{
−𝑚1,𝑥��𝑥(𝑡) − 𝑐𝑥��𝑥(𝑡) − 𝐹𝑟(𝑡)−𝑚1,𝑦��𝑦(𝑡) − 𝑐𝑦��𝑦(𝑡) − 𝑘𝑦𝑢𝑦(𝑡)−𝑚1,𝑧��𝑧(𝑡) − 𝑐𝑧��𝑧(𝑡) − 𝑘𝑧𝑢𝑧(𝑡)−𝑚1,𝑟𝑥��𝑥(𝑡) − 𝑐𝑟𝑥��𝑥(𝑡) − 𝑘𝑟𝑥𝜃𝑥(𝑡)−𝑚1,𝑟𝑦��𝑦(𝑡) − 𝑐𝑟𝑦��𝑦(𝑡) − 𝑘𝑟𝑦𝜃𝑦(𝑡)
−𝑚1,𝑟𝑧��𝑧(𝑡) − 𝑐𝑟𝑧��𝑧(𝑡) − 𝑘𝑟𝑧𝜃𝑧(𝑡)𝑚2,𝑥��𝑥(𝑡) + 𝑐𝑥��𝑥(𝑡) + 𝐹𝑟(𝑡)
𝑚2,𝑦��𝑦(𝑡) + 𝑐𝑦��𝑦(𝑡) + 𝑘𝑦𝑢𝑦(𝑡)𝑚2,𝑧��𝑧(𝑡) + 𝑐𝑧��𝑧(𝑡) + 𝑘𝑧𝑢𝑧(𝑡)𝑚2,𝑟𝑥��𝑥(𝑡) + 𝑐𝑟𝑥��𝑥(𝑡) + 𝑘𝑟𝑥𝜃𝑥(𝑡)𝑚2,𝑟𝑦��𝑦(𝑡) + 𝑐𝑟𝑦��𝑦(𝑡) + 𝑘𝑟𝑦𝜃𝑦(𝑡)
𝑚2,𝑟𝑧��𝑧(𝑡) + 𝑐𝑟𝑧��𝑧(𝑡) + 𝑘𝑟𝑧𝜃𝑧(𝑡) }
(4-21)

44
4.1.4. Model for the dependency of the coefficient of friction on contact pressure and sliding velocity
The model used for the coefficient of friction 𝜇 for steel-PTFE is the model proposed by Constantinou and his colleagues (Constantinou, Mokha, & Reinhorn, 1990), see section 2.2.5. It accounts for the dependency of the coefficient of friction on the contact pressure 𝑝 and the sliding velocity magnitude |��𝑥| and is written here as a function 𝑓𝜇:
𝜇 = 𝑓𝜇(𝑝, |��𝑥|) = 𝜇𝑚𝑎𝑥(𝑝) − (𝜇𝑚𝑎𝑥(𝑝) − 𝜇𝑚𝑖𝑛(𝑝)) ⋅ 𝑒−𝛼(𝑝)|��𝑥| (4-22)
The dependency on contact pressure of coefficients 𝜇𝑚𝑖𝑛, 𝜇𝑚𝑎𝑥 and 𝛼 appearing in equation (4-22) is modelled according to friction tests performed on a multi-directional pot bearing by Ülker-Kaustell (Ülker-Kaustell, 2017). More precisely, the dependency of 𝜇𝑚𝑖𝑛 and 𝜇𝑚𝑎𝑥 on pressure is fitted with a logarithmic law while the dependency of 𝛼 is fitted with a second order polynomial. As the tests were performed in the pressure range [0.7, 14] MPa and extrapolated to 30 MPa and as pressures smaller than 1 MPa are irrelevant for the sliding bearing application studied here, these coefficients are calculated according to equations (4-23) to (4-25) where 𝑝 is expressed in MPa and 𝛼 is given in mm−1 :
𝜇𝑚𝑖𝑛(𝑝) = {
0.037 if 𝑝 < 1 MPa−0.006 ln(𝑝) + 0.11 if 10 MPa ≤ 𝑝 < 30 MPa
0.0021 if 𝑝 ≥ 30 MPa (4-23)
𝜇𝑚𝑎𝑥(𝑝) = {
0.19 if 𝑝 < 1 MPa−0.03 ln(𝑝) + 0.54 if 10 MPa ≤ 𝑝 < 30 MPa
0.02 if 𝑝 ≥ 30 MPa (4-24)
𝛼(𝑝) = 1.0 ⋅ 10−13𝑝2 − 2.8 ⋅ 10−6𝑝 + 50 (4-25)
Since the choice has been made to set a fixed value for 𝜇𝑚𝑖𝑛 and 𝜇𝑚𝑎𝑥 for pressures that are smaller than 1 MPa, the same applies to the equivalent yield displacement 𝐷 that is used in the friction force calculation process described in section 4.1.3. This enables to avoid the singularity issue for values of 𝐷 that are close to zero in equation (4-12). Its value is therefore calculated as follows:
𝐷 = 𝑓𝐷(𝑝, ��𝑥) =
{
𝑓𝜇(𝑝0, ��𝑥)𝑝0𝐴𝑃𝑇𝐹𝐸𝑘0
if 𝑝 ≤ 𝑝0 = 1 MPa
𝑓𝜇(𝑝, ��𝑥)𝑝𝐴𝑃𝑇𝐹𝐸𝑘0
if 𝑝 > 𝑝0 = 1 MPa (4-26)

45
4.2. Generalization of the existing user-defined element This section details the extensions to the existing sliding bearing finite element that have been
made in the framework of this thesis. In the light of the literature review (chapter 2) and the theory (chapter 3) presented at the beginning of this thesis, these extensions aim at modelling bidirectional friction on the sliding plate and taking into account the influence of contact temperature on the steel-PTFE frictional behaviour.
4.2.1. Bidirectional steel-PTFE friction model based on the Bouc-Wen model The model for bidirectional steel-PTFE friction implemented in this thesis in the sliding bearing
element is based on the bidirectional extension of the frictional Bouc-Wen model introduced in section 3.3.3. It models friction on the 𝑥 − 𝑦 plane, which should correspond to the horizontal longitudinal and transverse axes of the bridge if the element is placed in a FEM bridge model. Just like the unidirectional model, it is used at each time increment 𝑡 in order to compute the element’s contribution to the overall system of equation from its current nodal displacements {𝑑}, velocities {��} and accelerations {��} that are provided by Abaqus.
The frictional force on the steel-PTFE sliding interface is now a bidirectional Bouc-Wen restoring force ��𝑟(𝑡) defined in equation (3-22). Using the element properties and the sliding motion components introduced in section 4.1.2, this force is calculated as:
��𝑟(𝑡) = 𝑎𝑘0��(𝑡) + (1 − 𝑎)𝑘0𝐷(𝑡)𝑧(𝑡) (4-27)
In equation (4-27), notations from equation (3-20) and (3-23) are used for 𝐹𝑟 (𝑡), ��(𝑡) and 𝑧(𝑡). This means that these three vectors have a first component along the 𝑥-axis and a second component along the 𝑦-axis. Parameters 𝑎 and 𝑘0 as well as the equivalent yield displacement 𝐷(𝑡) are scalars: their values characterise steel-PTFE friction as a whole and not only friction in one of the two directions. The value 𝐷(𝑡) for the current time increment 𝑡 is still calculated from the contact pressure 𝑝(𝑡), the coefficient of friction 𝜇(𝑡) and the contact area 𝐴𝑃𝑇𝐹𝐸. However, while the contact pressure 𝑝(𝑡) is calculated in the exact same way as in the unidirectional case, the coefficient of friction 𝜇(𝑡) uses an upgraded model that is detailed in section 4.2.2.
The main change between this bidirectional model and the unidirectional one presented in section 4.1.3 is that two hysteretic variables 𝑧𝑥(𝑡) and 𝑧𝑦(𝑡) (included in the vector 𝑧(𝑡)) need to be calculated here. They are calculated using equation (3-24) (cf. section 3.3.3) which is here included in a vector
function 𝑓𝐵𝑊:
��(𝑡) = 𝑓𝐵𝑊 (��(𝑡), 𝑧(𝑡)) (4-28)

46
𝑓𝐵𝑊(��, 𝑧) =
1𝐷 (
1 − 𝑧𝑥2(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥)) −𝑧𝑥𝑧𝑦(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))−𝑧𝑥𝑧𝑦(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥)) 1 − 𝑧𝑦2(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))
) ⋅ (��𝑥��𝑦) (4-29)
In a similar way to the unidirectional case, the following approximation applies to the rate of change over time of the hysteretic variable:
��(𝑡) ≈1Δ𝑡 (
𝑧(𝑡) − 𝑧𝑜𝑙𝑑(𝑡)) (4-30)
In equation (4-30), the vector 𝑧𝑜𝑙𝑑(𝑡) contains the two hysteretic variables from the previous time increment. From this approximation, the following approximation for 𝑧(𝑡) can also be derived:
𝑧(𝑡) ≈ 𝑧𝑜𝑙𝑑(𝑡) + Δ𝑡 ⋅ 𝑓𝐵𝑊 (��(𝑡), 𝑧(𝑡)) (4-31)
And the determination of the two hysteretic variables 𝑧𝑥(𝑡) and 𝑧𝑦(𝑡) can therefore be proceeded by solving for the root of the following vector function:
𝑓𝑁𝑅 (��(𝑡), 𝑧(𝑡), 𝑧𝑜𝑙𝑑(𝑡)) = 𝑧(𝑡) − 𝑧𝑜𝑙𝑑(𝑡) − Δ𝑡 ⋅ 𝑓𝐵𝑊 (��(𝑡), 𝑧(𝑡)) (4-32)
As in the unidirectional case, the determination of the root of 𝑓𝑁𝑅 is performed with Newton-Raphson method. Since the objective function is no longer a scalar function but a vector function with two components, its 2 × 2 Jacobian matrix is used in the Newton-Raphson method, rather than its
derivative. The Jacobian matrix of 𝑓𝑁𝑅 is denoted 𝑱𝑵𝑹 and contains the derivatives of each component
of 𝑓𝑁𝑅 with respect to each component of 𝑧:
𝑱𝑵𝑹 =
(
𝜕𝑓𝑁𝑅,𝑥𝜕𝑧𝑥
𝜕𝑓𝑁𝑅,𝑥𝜕𝑧𝑦
𝜕𝑓𝑁𝑅,𝑦𝜕𝑧𝑥
𝜕𝑓𝑁𝑅,𝑦𝜕𝑧𝑦 )
=
(
1 − Δ𝑡
𝜕𝑓𝐵𝑊,𝑥𝜕𝑧𝑥
−Δ𝑡𝜕𝑓𝐵𝑊,𝑥𝜕𝑧𝑦
−Δ𝑡𝜕𝑓𝐵𝑊,𝑦𝜕𝑧𝑥
1 − Δ𝑡𝜕𝑓𝐵𝑊,𝑦𝜕𝑧𝑦 )
(4-33)
The derivatives of the function 𝑓𝐵𝑊 defining the rates of change of the hysteretic variables can be expressed from equation (4-29):

47
{
𝜕𝑓𝐵𝑊,𝑥𝜕𝑧𝑥
=−1𝐷(2𝑧𝑥(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥)) + 𝑧𝑦(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦)))
𝜕𝑓𝐵𝑊,𝑥𝜕𝑧𝑦
=−1𝐷𝑧𝑥(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))
𝜕𝑓𝐵𝑊,𝑦𝜕𝑧𝑥
=−1𝐷𝑧𝑦(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥))
𝜕𝑓𝐵𝑊,𝑦𝜕𝑧𝑦
=−1𝐷(2𝑧𝑦(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦)) + 𝑧𝑥(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦)))
(4-34)
The inverse of the Jacobian matrix 𝑱𝑵𝑹 defined in equations (4-33) and (6-2) evaluated at point 𝑧 = 𝑧𝑘 is used in the Newton-Raphson iteration scheme (6-2) that enables to find an approximation of
the root of the function 𝑓𝑁𝑅. As a 2 × 2 matrix with a non-zero determinant, 𝑱𝑵𝑹’s inverse can be easily determined with the explicit formula involving its determinant and its cofactor matrix. As in the unidirectional case, the Newton-Raphson iteration scheme (6-2) consists in approximating the
representative hypersurface of 𝑓𝑁𝑅 with a straight line around the current iteration point and taking
the intersection of this line and the hyperplane of equation 𝑓𝑁𝑅 = 0 as the new iteration point.
𝑧𝑘+1 = 𝑧𝑘 − (𝑱𝑵𝑹)−1 ⋅ 𝑓𝑁𝑅 (��, 𝑧𝑘, 𝑧𝑜𝑙𝑑(𝑡)) (4-35)
The Newton-Raphson iteration scheme converges when ‖𝑧𝑘+1 − 𝑧𝑘‖ gets small enough according to a threshold criterion or ends if the number of iterations reaches a maximum value in order to avoid excessive CPU usage. Once the current values for the hysteretic variables 𝑧𝑥(𝑡) and 𝑧𝑦(𝑡) are found, the contribution of steel-PTFE friction to the system of equation is included in the element’s stiffness matrix [𝐾] and the right-hand side vector {𝑅𝐻𝑆}. The stiffness matrix block corresponding to each node is now:
[𝐾𝑛𝑜𝑑𝑒] =
[ 𝑎𝑘0 + 𝑓𝐾,𝑥𝑥(��, 𝑧) 𝑓𝐾,𝑥𝑦(��, 𝑧) 0 0 0 0
𝑓𝐾,𝑦𝑥(��, 𝑧) 𝑎𝑘0 + 𝑓𝐾,𝑦𝑦(��, 𝑧) 0 0 0 00 0 𝑘𝑧 0 0 00 0 0 𝑘𝑟𝑥 0 00 0 0 0 𝑘𝑟𝑦 00 0 0 0 0 𝑘𝑟𝑧]
(4-36)
Functions 𝑓𝐾,𝑥𝑥, 𝑓𝐾,𝑥𝑦 and 𝑓𝐾,𝑦𝑦 appearing in equation (6-2) denote the Bouc-Wen tangent stiffness and are expressed as follows:
{
𝑓𝐾,𝑥𝑥(��, 𝑧) = (1 − 𝑎)𝑘0[1 − 𝑧𝑥
2(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥))]𝑓𝐾,𝑥𝑦(��, 𝑧) = −(1 − 𝑎)𝑘0𝑧𝑥𝑧𝑦(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))𝑓𝐾,𝑦𝑥(��, 𝑧) = −(1 − 𝑎)𝑘0𝑧𝑥𝑧𝑦(𝛽 + 𝛾 sgn(��𝑥𝑧𝑥))
𝑓𝐾,𝑦𝑦(��, 𝑧) = (1 − 𝑎)𝑘0[1 − 𝑧𝑦2(𝛽 + 𝛾 sgn(��𝑦𝑧𝑦))]
(4-37)

48
The contribution of the element to the right-hand side vector of the overall system of equations now includes both Bouc-Wen restoring forces 𝐹𝑟,𝑥(𝑡) and 𝐹𝑟,𝑦(𝑡):
{𝑅𝐻𝑆} =
{
−𝑚1,𝑥��𝑥(𝑡) − 𝑐𝑥��𝑥(𝑡) − 𝐹𝑟,𝑥(𝑡)−𝑚1,𝑦��𝑦(𝑡) − 𝑐𝑦��𝑦(𝑡) − 𝐹𝑟,𝑦(𝑡)−𝑚1,𝑧��𝑧(𝑡) − 𝑐𝑧��𝑧(𝑡) − 𝑘𝑧𝑢𝑧(𝑡)−𝑚1,𝑟𝑥��𝑥(𝑡) − 𝑐𝑟𝑥��𝑥(𝑡) − 𝑘𝑟𝑥𝜃𝑥(𝑡)−𝑚1,𝑟𝑦��𝑦(𝑡) − 𝑐𝑟𝑦��𝑦(𝑡) − 𝑘𝑟𝑦𝜃𝑦(𝑡)
−𝑚1,𝑟𝑧��𝑧(𝑡) − 𝑐𝑟𝑧��𝑧(𝑡) − 𝑘𝑟𝑧𝜃𝑧(𝑡)𝑚2,𝑥��𝑥(𝑡) + 𝑐𝑥��𝑥(𝑡) + 𝐹𝑟,𝑥(𝑡)𝑚2,𝑦��𝑦(𝑡) + 𝑐𝑦��𝑦(𝑡) + 𝐹𝑟,𝑦(𝑡)𝑚2,𝑧��𝑧(𝑡) + 𝑐𝑧��𝑧(𝑡) + 𝑘𝑧𝑢𝑧(𝑡)𝑚2,𝑟𝑥��𝑥(𝑡) + 𝑐𝑟𝑥��𝑥(𝑡) + 𝑘𝑟𝑥𝜃𝑥(𝑡)𝑚2,𝑟𝑦��𝑦(𝑡) + 𝑐𝑟𝑦��𝑦(𝑡) + 𝑘𝑟𝑦𝜃𝑦(𝑡)
𝑚2,𝑟𝑧��𝑧(𝑡) + 𝑐𝑟𝑧��𝑧(𝑡) + 𝑘𝑟𝑧𝜃𝑧(𝑡) }
(4-38)
4.2.2. Model for the dependency of the coefficient of friction on contact temperature
In addition to contact pressure and sliding velocity, the coefficient of friction for steel-PTFE interfaces depends on the contact temperature as stated in section 2.2.3. The existing model used to calculate the coefficient of friction in the existing user-defined element and introduced in section 4.1.4 needs therefore to be extended so that contact temperature is accounted for. The existing model is based on friction tests performed by Ülker-Kaustell on multi-directional bearings at ambient indoor air temperature (Ülker-Kaustell, 2017). The temperature was not measured during these tests but it can be assumed to be around 20°C.
With 𝑓𝜇,1 denoting the function used to compute the coefficient of friction for steel-PTFE according to the model used on the existing element, the influence of contact temperature can be accounted for by adding a correction factor 𝑓𝜇,2 as equation (4-39) shows. As the influence of contact temperature cannot be uncoupled from the influence of sliding velocity (cf. section 2.2), this correction factor must take both the contact temperature and the sliding velocity as inputs. The model presented in this section uses 20°C as a reference value. The value of the correction factor is thus set to 1 at this temperature.
{𝜇 = 𝑓𝜇,1(𝑝, ‖��‖) ⋅ 𝑓𝜇,2(𝑇, ‖��‖)∀𝑣, 𝑓𝜇,2(20°C, 𝑣) = 1
(4-39)

49
Note in equation (4-39) that the models included in functions 𝑓𝜇,1 and 𝑓𝜇,2 depend on the magnitude of the sliding velocity. In the bidirectional friction case, this magnitude corresponds to the Euclidean norm of the sliding velocity vector in the 𝑥 − 𝑦 plane.
The model for the temperature influence factor 𝑓𝜇,2 is based on experiments lead by Dolce and his colleagues (Dolce, Cardone, & Croatto, 2005) and presented in section 2.2. They measured the frictional force under different contact pressure, sliding velocity and air temperature conditions. The sliding velocities to which the steel-PTFE interface was subjected were 8 mm/s (low velocity), 160 mm/s (medium velocity) and 316 mm/s (high velocity). The air temperature values at which the experiments were performed were -10°C, 20°C and 50°C. The correction factor 𝑓𝜇,2 was thus fitted over these experimental data normalized by the values measured at 20°C in order to fulfil the neutrality criterion at this temperature (cf. equation (6-2)). For each of the three experimental sliding velocities, the evolution of the ratio 𝜇(𝑇)/𝜇(20°C) over temperature was fitted with a first linear regression below 𝑇0 = 20°C and a second linear regression above 𝑇0 = 20°C as shown in Figure 4-3. The linear regression equations are written in equations (4-40)where the experimental velocities are denoted 𝑣1 = 8 mm/s, 𝑣2 = 160 mm/s and 𝑣3 = 316 mm/s.
{𝑓𝜇,2(𝑇, 𝑣𝑖) = 𝑠𝑖,1(𝑇 − 𝑇0) + 1 if 𝑇 ≤ 𝑇0 = 20°C𝑓𝜇,2(𝑇, 𝑣𝑖) = 𝑠𝑖,2(𝑇 − 𝑇0) + 1 if 𝑇 > 𝑇0 = 20°C
(4-40)
In order to attribute a value to the correction value 𝑓𝜇,2 for sliding velocities other than the ones used experimentally, an extrapolation was carried out from the linear regressions that can be seen in Figure 4-3. Two extrapolated slopes 𝑠1(𝑣) on the left to 𝑇0 = 20°C and 𝑠2(𝑣) on the right to 𝑇0 = 20°C
Figure 4-3 - Linear regressions for the evolution of 𝜇(𝑇)/𝜇(20°𝐶) with respect to temperature

50
were indeed defined for any sliding velocity value 𝑣. Slopes are linearly interpolated between the low velocity 𝑣1 slope and the medium velocity 𝑣2 slope if the sliding velocity is below 𝑣2 = 160 mm/s. For sliding velocities greater than the medium velocity 𝑣2, slopes are linearly interpolated between the medium velocity 𝑣2 slope and the high velocity 𝑣3 slope. This is summarized in the following equation:
𝑠𝑗(𝑣) = {
𝑠2,𝑗 − 𝑠1,𝑗𝑣2 − 𝑣1
(𝑣 − 𝑣1) + 𝑠1,𝑗 if 𝑣 ≤ 𝑣2𝑠3,𝑗 − 𝑠2,𝑗𝑣3 − 𝑣2
(𝑣 − 𝑣2) + 𝑠2,𝑗 if 𝑣 > 𝑣2 (4-41)
With the slope functions 𝑠1(𝑣) and 𝑠2(𝑣) defined in equation (6-2), the final definition for the temperature influence factor 𝑓𝜇,2 is given in equation (6-2):
𝑓𝜇,2(𝑇, 𝑣) = {𝑠1(𝑣) ⋅ (𝑇 − 𝑇0) + 1 if 𝑇 ≤ 𝑇0 = 20°C𝑠2(𝑣) ⋅ (𝑇 − 𝑇0) + 1 if 𝑇 > 𝑇0 = 20°C
(4-42)
The resulting correction factor function 𝑓𝜇,2(𝑇, 𝑣) is represented with iso-value curves in Figure 4-4.
Figure 4-4 - Iso-value curves for the correction factor function 𝑓𝜇,2(𝑇, 𝑣)
4.2.3. Model for contact temperature increase with respect to friction The model for calculating the contact temperature increase with respect to friction that was added
to the sliding bearing finite element is a direct implementation of the model introduced in section 3.4.2. Whether the PTFE sliding plate and the surrounding steel body can be regarded as semi-infinite body is discussed in section 6.3.2. Starting from an initial contact temperature 𝑇0 that must be specified

51
in the {𝑝𝑟𝑜𝑝} vector at the beginning of a simulation, the contact temperature value 𝑇 of the bearing’s sliding interface is updated at each time increment thanks to the following formula adapted from equation (3-52):
𝑇 = 𝑇𝑜𝑙𝑑 +2(��𝑓(𝑡) ⋅ ��(𝑡))
𝐴𝑃𝑇𝐹𝐸(𝑏𝑠𝑡𝑒𝑒𝑙 + 𝑏𝑃𝑇𝐹𝐸)√Δ𝑡𝜋
(4-43)
At each time increment, the current contact temperature value 𝑇 is stored in the solution-dependent variables vector {𝑆𝐷𝑉}. The value 𝑇𝑜𝑙𝑑 that can be seen in equation (6-2) is the contact temperature value from the previous time increment. It is accessed through the {𝑆𝐷𝑉} vector. Also appearing in equation (4-43), Δ𝑡 is the current time step between two consecutive time increments. Rather than using the Bouc-Wen restoring force 𝐹𝑟 (𝑡), this model uses the current value for the frictional force 𝐹𝑓 (𝑡), which is directly computed from the hysteretic variables vector 𝑧(𝑡), as well as the current coefficient of friction 𝜇(𝑡) and the current contact pressure 𝑝(𝑡) given by equation (3-28). The values for steel and PTFE thermal effusivities 𝑏𝑠𝑡𝑒𝑒𝑙 and 𝑏𝑃𝑇𝐹𝐸 are hard-coded and were calculated from material data that can be found in Table 4-1.
Parameter Steel PTFE Mass density 𝝆 7700 kg/m3 2150 kg/m3
Thermal conductivity 𝝀 16 W/m/K 0.25 W/m/K Thermal capacity 𝒄 420 J/kg/K 1050 J/kg/K
Thermal diffusivity 𝑫 𝜆/𝜌𝑐 = 4.9 ⋅ 10−6 m²/s 𝜆/𝜌𝑐 = 1.1 ⋅ 10−7 m²/s Thermal effusivity 𝒃 √𝜆𝜌𝑐 = 7.2 ⋅ 103 J/m2/K/s1/2 √𝜆𝜌𝑐 = 7.5 ⋅ 102 J/m2/K/s1/2
Table 4-1 - Material data used to compute thermal effusivities for steel and PTFE
4.3. Modelling of the Banafjäl bridge The Banafjäl bridge is a simply supported steel-concrete composite bridge. It is located on the
Bothnia railway line (Swedish: Botniabanan) in northern Sweden, a bit south of Umeå in the West Bothnia province (Swedish: Västerbotten). The bridge is 42 meters long and rests on two supports, both equipped with two pot bearings. Two different models of the bridge are used in this thesis:
- The first model uses Euler-Bernoulli beams for the superstructure. It is a 2D model that only allows to place a single bearing at each end of the beam. As the Banafjäl bridge is equipped with two bearings at each end, a single bearing element standing for two bearings is used at each end of the bridge.
- In order to be able to include all four bearings of the Banafjäl bridge, a second model was made. It uses regular 3D Timoshenko beams (only accounting for pure torsion) for the 38 meters long central part of the bridge as well as a detailed section using quadratic shell elements at each end of the bridge (for two meters at each end). The bearing elements are placed below the flanges of these detailed ends.

52
Figure 4-5 – The Banafjäl bridge
4.3.1. Model with Euler-Bernoulli beams This model uses 84 open-section Euler-Bernoulli beams for the bridge’s superstructure. This
corresponds to Abaqus beam element B33. The parameters used to define the beam elements are shown in Table 4-2. These parameters characterize the equivalent steel section of the bridge’s superstructure and are calculated according to the simplified model of the Banafjäl bridge proposed by Shu et al. (Shu, Zhang, Gonzalez, & Karoumi, 2013). The bridge is equipped with two TOBE 60 pot bearings at each support. The two bearings at each support are modelled together in a single user-defined element using the parameters presented in Table 4-3. Bearing elements are placed with an eccentricity to the superstructure’s neutral axis of 𝑒 = 2.0 m. This is summarized in Figure 4-6.
Figure 4-6 - Simplified model of the Banafjäl bridge using open-section Timoshenko beams
Equivalent beam model of the Banafjäl bridge Parameter Name Value
𝑬 Modulus of elasticity 210 GPa 𝑨 Cross-sectional area 0.57 m2
𝑰𝒚 Area moment of inertia about the 𝑦-axis 1.2 m4
𝑰𝒛 Area moment of inertia about the 𝑧-axis 0.85 m4

53
𝑱 Torsional constant 0.048 m4 𝑳 Total deck length 42 m 𝝆 Equivalent mass density 24000 kg/m3
𝜶 First Rayleigh damping coefficient 0.22 s-1
𝜷 Second Rayleigh damping coefficient 2.2 ⋅ 10−4 s
Table 4-2 - Parameters used to define the beam elements modelling the Banafjäl bridge's superstructure
Pot bearing model Parameter Name Value
𝒌𝟎 Pre-yielding stiffness 1.0 GN/m
𝒂 Pre-yielding to post-yielding stiffness ratio 1.0 ⋅ 10−12
𝜷 Bouc-Wen 𝛽 parameter 0.5
𝜸 Bouc-Wen 𝛾 parameter 0.5 𝒏 Bouc-Wen 𝑛 parameter 2
𝑨𝑷𝑻𝑭𝑬 Steel-PTFE contact area 0.34 m2 Table 4-3 - Parameters used to define the user-defined element modelling the Banafjäl bridge's pot bearings
4.3.2. Model with regular Timoshenko beams and detailed ends using shell elements
This model uses 76 regular Timoshenko beams for the bridge’s superstructure as well as a detailed model of the ends made with quadratic shell elements (S4R) for the superstructure. Abaqus beam element B31 are thus placed along the 38 meters central part of the bridge and use the parameters defined in Table 4-2. Sliding bearings elements are place below the flanges of the detailed shell elements ends. The parameters used to define the two TOBE 60 bearings of a same support are modelled separately in single user-defined elements using the parameters presented in Table 4-4. Depending on their position, they allow translational in zero, one or two directions as shown in Figure 4-7.

54
Figure 4-7 - Model of the Banafjäl bridge using a simplified Timoshenko beam part and more detailed ends with shell elements
Pot bearing model Parameter Name Value
𝒌𝟎 Pre-yielding stiffness 1.0 GN/m
𝒂 Pre-yielding to post-yielding stiffness ratio 1.0 ⋅ 10−12
𝜷 Bouc-Wen 𝛽 parameter 0.5 𝜸 Bouc-Wen 𝛾 parameter 0.5
𝑨𝑷𝑻𝑭𝑬 Steel-PTFE contact area 0.17 m2 Table 4-4 - Parameters used to define the user-defined element modelling the Banafjäl bridge's pot bearings
4.4. Case studies The three models that have been added to the sliding bearing finite element in the frame of this
thesis (i.e. the bidirectional steel-PTFE friction model, the influence of the contact temperature on the coefficient of friction and the model for estimating the contact temperature increase during friction simulations) have been verified through several case studies. The specification of each test performed on the bearing element itself, or on a model of the Banafjäl bridge including this element, are given in this section.

55
4.4.1. Verification of the bidirectional steel-PTFE friction model 4.4.1.1. Comparison to results given by the existing unidirectional friction model
In order to check the consistency of the outputs given by the bidirectional friction model with the outputs given by the unidirectional one, two types of simulations enabling a comparison between the models were performed. The purpose was also the show that the bidirectional model is invariant with respect to the direction of the motion in the 𝑥 − 𝑦 plane. The direction of the motion can be denoted with its angle 𝜃 to the 𝑥-axis. This invariance is referred to as “rotational invariance” later in the report. Simulations with the bidirectional model were compared to a sinusoidal motion on the unidirectional model having the following equation:
𝑢(𝑡) = 𝑈0 sin(𝜔𝑡) (4-44)
The first type of simulation performed on the bidirectional steel-PTFE friction model is a unidirectional motion with a given angle 𝜃 to the 𝑥-axis. Thus, motion components 𝑢𝑥 and 𝑢𝑦 follow the equation of motion (4-45):
(𝑢𝑥(𝑡)𝑢𝑦(𝑡)
) = 𝑈0 sin(𝜔𝑡) ⋅ (cos 𝜃sin𝜃) (4-45)
Instead of having a constant angle 𝜃 to the 𝑥-axis, the second type of simulation performed on the bidirectional model uses a varying angle 𝜃(𝑡) so that the direction of movement completes one full rotation while the movement itself completes four periods: 𝜃(𝑡) = 𝜔𝑡/4. Thus, motion components 𝑢𝑥 and 𝑢𝑦 follow the equation of motion (4-45). This gives a flower-shaped motion that can be seen in Figure 4-8.
(𝑢𝑥(𝑡)𝑢𝑦(𝑡)
) = 𝑈0 sin(𝜔𝑡) ⋅ (cos (
𝜔𝑡4)
sin (𝜔𝑡4)) (4-46)
In both types of simulation, the Bouc-Wen model parameters presented in Table 4-5 and the mechanical parameters presented in Table 4-6 were assigned to the element. The unidirectional friction model takes 𝑛 = 2 and 𝑘𝑦 = 𝑘0 in order to be consistent with the values used in the bidirectional model. A vertical load 𝐹 = 5 MN was applied on top of the bearing, thus producing a
contact pressure 𝑝 = 𝐹𝐴𝑃𝑇𝐹𝐸
= 25 MPa. The displacement amplitude that was used for both types of
simulation is 𝑈0 = 5 cm. In both cases the frequency of the imposed displacement was 𝑓 = 2𝜋𝜔=
0.125 Hz.

56
Figure 4-8 – Sliding motion imposed to the bearing element in the second type of simulation
Bouc-Wen model parameters Parameter Name Value
𝒌𝟎 Pre-yielding stiffness 1.0 GN/m
𝒂 Pre-yielding to post-yielding stiffness ratio 1.0 ⋅ 10−12
𝜷 Bouc-Wen 𝛽 parameter 0.5
𝜸 Bouc-Wen 𝛾 parameter 0.5
𝑨𝑷𝑻𝑭𝑬 Steel-PTFE contact area 0.2 m2 Table 4-5 - Bouc-Wen model parameters used to verify the bidirectional friction model
Mechanical parameters Parameter Name Value
𝒌𝒛, 𝒌𝒓𝒛 Vertical translational and
rotational stiffnesses 1.0 ⋅ 1014 N/m
𝒌𝒓𝒙, 𝒌𝒓𝒚 In-plane rotational stiffnesses 10 MN/m
𝒄𝒙, 𝒄𝒚, 𝒄𝒛, 𝒄𝒓𝒙, 𝒄𝒓𝒚, 𝒄𝒓𝒛 Damping coefficients 1.0 ⋅ 103 kg/s
𝒎𝟏,𝒙,𝒎𝟏,𝒚,𝒎𝟏,𝒛, 𝒎𝟏,𝒓𝒙,𝒎𝟏,𝒓𝒚,𝒎𝟏,𝒓𝒛
Bearing top mass coefficients 100 kg
𝒎𝟐,𝒙,𝒎𝟐,𝒚,𝒎𝟐,𝒛, 𝒎𝟐,𝒓𝒙,𝒎𝟐,𝒓𝒚,𝒎𝟐,𝒓𝒛
Bearing bottom mass coefficients 100 kg
Table 4-6 - Mechanical parameters used to verify the bidirectional friction model

57
4.4.1.2. Influence of the “knee-sharpness” parameter 𝒏
As explained in section 3.3.3, the bidirectional extension of the Bouc-Wen model that has been implemented in the sliding bearing finite element in the frame of this thesis does not allow for arbitrary “knee-sharpness”. The parameter controlling this “knee-sharpness” is denoted 𝑛 in the original Bouc-Wen model. The bidirectional model used in this thesis (proposed by Park et al.) is equivalent to 𝑛 = 2 regarding the “knee-sharpness” (Park, Wen, & Ang, 1986) while the previously developed unidirectional bearing element uses 𝑛 = 1 (Ülker-Kaustell, 2017).
Thus, in order to estimate the impact of changing the “knee-sharpness” value on the behaviour of the sliding bearing element, an influence test of this parameter was performed. Using the parameters specified in Table 4-5 and Table 4-6, the unidirectional motion specified in section 4.4.1.1 was applied on the existing unidirectional bearing with on the one hand 𝑛 = 1 and on the other hand 𝑛 = 2. The results of these two simulations were also compared with the bidirectional friction model on the same unidirectional motion having an angle 𝜃 = 0° to the 𝑥-axis.
4.4.1.3. Comparison to the model proposed by Constantinou et al. (1990)
In addition to the verifications presented above, the response of the bidirectional friction model was compared to simulations performed by Constantinou et al. with a steel-PTFE sliding bearing model based on the Bouc-Wen model (Constantinou, Mokha, & Reinhorn, 1990). Their model is based on the bidirectional extension of the Bouc-Wen model proposed by Park et al. (Park, Wen, & Ang, 1986) just like the bidirectional friction model implemented in this thesis. However, Constantinou et al. used a different model for the coefficient of friction, for which they did not provide the specifications. This comparison is made with two simulations in which a periodic displacement as defined in equation (4-47) was imposed to the sliding bearing model.
{𝑢𝑥(𝑡) = 𝑈0 sin(𝜔𝑡)𝑢𝑦(𝑡) = 𝑈0 sin(2𝜔𝑡)
(4-47)
The bidirectional movement described in equation (4-47) is eight-shaped as shown in Figure 4-9. The first simulation was made with 𝑈0 = 1 in = 2.54 cm and 𝜔 = 1 rad/s. The values for the second simulation were 𝑈0 = 4 in = 10.16 cm and 𝜔 ≈ 2.77 rad/s (corresponding to 𝑓 = 0.6 Hz). In both simulations the contact pressure was 𝑝 = 1000 psi ≈ 6,895 MPa. When modelling the bearing, Constantinou et al. used the parameters 𝛽 = 0.1 and 𝛾 = 0.9. As the other parameters have not been specified in their paper, values presented in Table 4-5 and Table 4-6 were used. These other parameters may have an influence on the magnitude of friction forces in the bearing but do not influence the shape of hysteresis loops. In order to compare the hysteresis loops obtained by Constantinou et al. and the loops given by this case study, force values in the different loops were normalized.

58
Figure 4-9 – Sliding motion imposed to the bearing model by (Constantinou, Mokha, & Reinhorn, 1990) and used to verify the bidirectional friction model implemented in the sliding bearing element
4.4.2. Computation of the contact temperature increase in a sliding bearing resulting from a train passage
As the contact temperature at the steel-PTFE interface in sliding bearings may have an influence on the coefficient of friction and thus on the magnitude of forces that develop when there is sliding in the bearing (cf. section 2.2.4), being able to estimate the contact temperature in the bearing is important. Besides, the increase of temperature itself is theoretically related to the magnitude of the friction force (cf. section 3.4.2). A comparison of the increase in temperature predicted with and without the contact temperature influence model discussed in this thesis could therefore give an indication on the relevance of this model.
The present model for contact temperature increase was thus used to compute the increase resulting from a train passage on the Banafjäl bridge. The bridge itself was modelled as specified in section 4.3.1. An initial contact temperature of 𝑇𝑖𝑛𝑖𝑡 = 20°C was given to the model. The train passage was modelled with the HSLM4-A1 universal train load case. It models a train having 18 intermediate cars, each car being 18 m long, with 2 m between axels around a bogie and a 170 kN load for each axle. The train speed was 200 km/h. Two simulations were carried out and the temperature influence model was only included in the second one.
4 High-Speed Load Model

59
4.4.3. Response of the Banafjäl bridge to an impulse load A motivation for developing the sliding bearing finite element discussed in this thesis was to be
able to predict more accurately the dynamic properties of bridges that are equipped with sliding bearings. The first resonance frequencies of the Banafjäl bridge (introduced in section 4.3) have already been assessed experimentally (James, Karoumi, Kullberg, & Trillkott, 2005). A prediction of these frequencies through a simulation that uses the bidirectional bearing element discussed in this thesis could then be compared to these measurements.
Using the model of the Banafjäl bridge described in section IV.4.3.2, the response to an impulse load was simulated. Four simulation were actually made. In each of the three first simulations, a load consisting of one of the following components was applied:
- A vertical component of 1,5 MN - A transverse component of 3,0 MN - A torsional torque of 1,5 MNm
A fourth simulation in which the applied load consists of the three components at once was also carried out. This aims at creating free vibrations consisting of vertical bending, transverse bending and torsional bending resonance modes. The simulation is carried out for 20 seconds and the displacement components along the vertical and transverse axes as well as the rotation about the longitudinal axis are analysed in order to estimate the frequencies of the resonance modes that were stimulated by this impulse load. The model accounting for the contact temperature dependency of the friction coefficient was not included.
The analysis of acceleration components in order to estimate resonance frequencies is performed by a Fast Fourier transform. The signals being sampled at a rate of 𝐹𝑠 = 100 Hz, the Nyquist frequency is worth 𝐹𝑁 = 50 Hz. The sampling of the signals is performed over the 10 last seconds of the simulation, i.e. 10 seconds after the impulse is applied on the structure. The reason for this is that dissipative effects provided by the bearings are much smaller in the 10 last seconds than they are in the 10 first seconds

60
5. Results
5.1. Verification of the bidirectional steel-PTFE friction model
As explained in section 4.2.1, the bidirectional extension to the steel-PTFE friction model implemented by Ülker-Kaustell in the existing user-defined finite element (Ülker-Kaustell, 2017) was compared to existing results. A first verification by performing bidirectional simulations in simple cases that could directly be compared to the unidirectional model’s outputs. The model was also compared to another bidirectional steel-PTFE friction model introduced by Constantinou et al. and also based on the Bouc-Wen model (Constantinou, Mokha, & Reinhorn, 1990).
5.1.1. Comparison to results given by the unidirectional model The bidirectional model was first compared to the existing unidirectional with sinusoidal imposed
displacements having a constant angle 𝜃 to the 𝑥-axis. The simulation parameters used to perform these comparisons are specified in section 4.2.1. As the bidirectional friction model is an extension of the unidirectional one, an angle 𝜃 that is worth 0° is expected to give the same response in both models. For that angle, the imposed displacement is indeed the same for both models. The force-displacements hysteresis loops that result from this sinusoidal displacement are shown in Figure 5-1. As expected, they effectively overlap with the hysteresis loops that the unidirectional model outputs.
The sliding velocities, hysteretic variables and friction forces that were recorded during this simulation along both axes of the sliding plate are shown in Figure 5-2. As there is a continuous sliding movement, the static friction state is never reached. This entails that the hysteretic variable 𝑧𝑥 is equal to ±1 (kinetic friction condition) during the whole simulation and gets punctually equal to 0 when the sliding velocity changes signs.
In order to test the rotational invariance of the model, the sinusoidal displacement loading simulation was also performed with other values for the 𝜃-angle. The resulting bidirectional friction force ��𝑓 and displacement �� are projected in the 𝜃-direction according to equation (5-1) so that it can be compared with the friction force obtained with the unidirectional model.
{𝑢(𝜃) = �� ⋅ 𝑒(𝜃) = (
𝑢𝑥𝑢𝑦) ⋅ (
cos 𝜃sin 𝜃)
𝐹𝑓(𝜃) = ��𝑓 ⋅ 𝑒(𝜃) = (𝐹𝑓,𝑥𝐹𝑓,𝑦
) ⋅ (cos 𝜃sin𝜃) (5-1)
The following figures exhibit the hysteretic loops, sliding velocities, hysteretic variables and friction forces obtained for 𝜃 = 30°, 𝜃 = 45°, 𝜃 = 60° and 𝜃 = 120°. In all cases, the projected loops

61
are identical to each other and also identical to the one obtained with the unidirectional model. The hysteretic variables graphs show that kinetic friction is always reached for ‖𝑧‖ = 1. Depending on the angle 𝜃, this condition is reached for 𝑧𝑥 = ±cos 𝜃 and 𝑧𝑦 = ±sin 𝜃.
Figure 5-1 - Force-displacement hysteresis loops obtained for a sinusoidal displacement loading with a constant angle 𝜃 =0° to the 𝑥-axis - Comparison with loops obtained with the unidirectional model
Figure 5-2 - Sliding velocities, hysteretic variables and friction force components along 𝑥- and y-axes for a sinusoidal displacement loading with a constant angle 𝜃 = 0° to the 𝑥-axis.

62
Figure 5-3 - Force-displacement hysteresis loops obtained for a sinusoidal displacement loading with a constant angle 𝜃 =30° to the 𝑥-axis - Comparison with loops obtained with the unidirectional model
Figure 5-4 - Sliding velocities, hysteretic variables and friction force components along 𝑥- and y-axes for a sinusoidal displacement loading with a constant angle 𝜃 = 30° to the 𝑥-axis.

63
Figure 5-5 - Force-displacement hysteresis loops obtained for a sinusoidal displacement loading with a constant angle 𝜃 =45° to the 𝑥-axis - Comparison with loops obtained with the unidirectional model
Figure 5-6 - Sliding velocities, hysteretic variables and friction force components along 𝑥- and y-axes for a sinusoidal displacement loading with a constant angle 𝜃 = 60° to the 𝑥-axis

64
Figure 5-7 - Force-displacement hysteresis loops obtained for a sinusoidal displacement loading with a constant angle 𝜃 =60° to the 𝑥-axis - Comparison with loops obtained with the unidirectional model
Figure 5-8 - Sliding velocities, hysteretic variables and friction force components along 𝑥- and y-axes for a sinusoidal displacement loading with a constant angle 𝜃 = 60° to the 𝑥-axis.

65
Figure 5-9 - Force-displacement hysteresis loops obtained for a sinusoidal displacement loading with a constant angle 𝜃 =120° to the 𝑥-axis - Comparison with loops obtained with the unidirectional model
Figure 5-10 - Sliding velocities, hysteretic variables and friction force components along 𝑥- and y-axes for a sinusoidal displacement loading with a constant angle 𝜃 = 120° to the 𝑥-axis.

66
The comparison to the unidirectional model and the check for the isotropy of the bidirectional model was also performed on a flower-shaped motion (cf. section 4.4.1.1). Figure 5-11 shows the resulting hysteresis loops. They are obtained with the projection described in equation (5-1), using the
instantaneous angle 𝜃(𝑡) = 𝜔𝑡4
where 𝜔 is the cyclic frequency of the base sinusoidal motion.
Hysteresis loops no longer overlap perfectly on the one produced by the unidirectional model but extrema force values are respected. The evolution of both the projected sliding velocity and the Euclidean norm of the velocity is shown in Figure 5-12. A comparison is made with the velocity obtained from the sinusoidal motion test with the unidirectional friction model.
Figure 5-11 - Force-displacement hysteresis loops obtained for a sinusoidal displacement loading with a varying angle 𝜃 to the 𝑥-axis - Comparison with loops obtained with the unidirectional model

67
Figure 5-12 – a. Projection of the velocity history during the flower-shaped motion test on the instantaneous direction of the motion 𝜃 and comparison with the velocity given by the unidirectional model | b. Euclidean norm of the velocity history during the flower-shaped motion test and comparison with the absolute value of the velocity given by the unidirectional
model .
5.1.2. Influence of the “knee-sharpness” parameter 𝒏 The influence of the “knee-sharpness” parameter that can have arbitrary positive values in the
unidirectional Bouc-Wen model and has a fixed value 𝑛 = 2 in the bidirectional extension of the model was also assessed. With an imposed displacement that is the same as the unidirectional displacement used in the previous section and mechanical and model parameters that are the same except for 𝑛, the hysteretic loops given by the unidirectional model with 𝑛 = 1 are shown in Figure 5-13. These loops are compared with the loops given on the one hand by the unidirectional model using 𝑛 = 2 and by the bidirectional model with an orientation of the unidirectional motion being worth 𝜃 = 0°.

68
Figure 5-13 - Comparison of hysteretic loops obtained with the unidirectional friction model using 𝑛 = 1 and loops obtained by the uni- and bidirectional model for 𝑛 = 2
One can notice in Figure 5-13 that the different loops overlap perfectly. As the “knee-sharpness” parameter influences the length of the transition between the pre-yielding and the post-yielding states of the Bouc-Wen model, a small difference in the shape of the loops is expected at the top-middle of the loops but the difference is too small to be noticed here.
5.1.3. Comparison to the model proposed by Constantinou et al. (1990) A final comparison was made with the outputs of a bidirectional friction model introduced by
Constantinou et al. and also based on the Bouc-Wen model (Constantinou, Mokha, & Reinhorn, 1990). Two simulations (one at medium sliding velocity, one at high velocity) were performed and the resulting hysteresis loops were compared to the ones presented by Constantinou et al. They are presented below in Figure 5-14 and Figure 5-15. The frictional forces were divided by the maximum friction force component along the 𝑦-axis and the displacements were divided by the displacement amplitudes. Although the shapes are similar, one can notice that the loops do not overlap perfectly in the first simulation (medium velocity). However, there is a very nice overlap for loops obtained with the second simulation (high velocity).

69
Figure 5-14 - Force-displacement hysteresis loops obtained with the eight-shaped motion at medium sliding velocity. Comparison to results from (Constantinou, Mokha, & Reinhorn, 1990)
Figure 5-15 - Force-displacement hysteresis loops obtained with the eight-shaped motion at high sliding velocity. Comparison to results from (Constantinou, Mokha, & Reinhorn, 1990)

70
5.2. Contact temperature increase in a sliding bearing resulting from a train passage
As mentioned in section 4.4.2, the model estimating the temperature increase due to friction in the bearing and the model accounting for the influence of steel-PTFE contact temperature on the coefficient of friction were tested in a train passage simulation on a simplified model of the Banafjäl bridge. Two simulations were performed on the model introduced in section 4.3.1. In the first one, only the temperature increase calculation model was incorporated. The effects of this temperature increase on the steel-PTFE friction coefficient were then accounted for in a second simulation in which the temperature influence model was added. Both simulations were made with the HSLM-A1 train load case with a train speed of 200 km/h. The temperature evolution curve obtained from the first test is shown in Figure 5-16. The temperature has increased from 𝑇𝑖𝑛𝑖𝑡 = 20°𝐶 to 𝑇𝑓𝑖𝑛𝑎𝑙 = 34°𝐶. This results from the hysteretic friction patterns along both directions of the sliding plate that can be seen in Figure 5-17.
Figure 5-16 - Contact temperature evolution in the bearing - Influence of temperature on the coefficient of friction is not taken into account
In the friction force versus displacement patterns shown in Figure 5-17, the loops around 1.4 mm displacement along the longitudinal axis (𝑥-axis) result from the bridge being subjected to a constant load from the train during its passage. The loops that can be seen around the equilibrium point (0 mm) for this same axis correspond to the free vibrations following the train passage. The friction force reaches extreme values of about 50 kN.

71
Figure 5-17 - Force-displacement hysteretic loops in the bearing - Influence of temperature on the coefficient of friction is not taken into account
The second simulation in which the coefficient of friction was updated at each time increment according to the current contact temperature in the bearing gives a lower temperature increaser. As shown in Figure 5-18, the temperature increases from 𝑇𝑖𝑛𝑖𝑡 = 20°𝐶 to 𝑇𝑓𝑖𝑛𝑎𝑙 = 30°𝐶 which represents a 12% smaller increase than the result given by the first simulation.
Figure 5-18 - Contact temperature evolution in the bearing - Influence of temperature on the coefficient of friction is taken into account

72
5.3. Bridge response to an impulse load As explained in section 4.4.3, impulse load simulations were carried out on a model of the Banafjäl
bridge. The load itself had either a vertical component of 1,5 MN, a transverse component of 3,0 MN, a torque component of 1,5 MNm or all three components at once and was applied to the middle of the free span of the bridge. The frictional response of the bearings as well as the acceleration response of the deck’s quarter and mid-points were analysed.
The impulse load is followed by an oscillation of the bridge along the vertical and transverse directions and around the longitudinal axis. Figure 5-19 presents the frictional hysteresis loops that were obtained in the bidirectional sliding bearing of the Banafjäl bridge during the simulations. One can observe that the interior area of the loops is decreasing over the cycles. This is a manifestation of the energy dissipation due to friction in the bearing. The vertical force and the vertical bending oscillation that it induces only enable a displacement along the bridge’s longitudinal axis (𝑥-axis) in bearings. All other components enable displacement along both axes in the bidirectional bearing.
Figure 5-19 - Force-displacement friction response to an impulse load about both directions of the sliding plate of the bidirectional bearing in the Banafjäl bridge. The type of impulse load applied to the structure is specified on top of the
corresponding graph.

73
The oscillation of the bridge following the impulse was also assessed through the analysis of the acceleration of the points located at the quarters and the middle of the beam. A frequency analysis of these acceleration data was carried out by the means of a Fast Fourier Transform (FFT). In Figure 5-20 are plotted the FFT of the transverse, vertical and torsional acceleration data. The peaks on each graph highlight the detected first resonance mode that are associated with the degree of freedom of the graph. The detected resonance modes and frequencies are summarized in Table 5-1.
Resonance mode Frequency 1st vertical bending mode 4.11 Hz
1st torsional mode 3.61 Hz 1st transverse bending mode 5.31 Hz
Table 5-1 - First vertical bending, torsional and transverse bending resonance modes and their corresponding frequencies detected through the analysis of the bridge's acceleration following an impulse load
Figure 5-20 - Fast Fourier Transforms of the acceleration of the bridge's midspan point sampled 10 seconds after an impulse load is applied to the structure. The degree of freedom being assessed is specified on the left while the type of impulse load
that was applied is specified in the legend of each graph..

74
6. Discussion
6.1. Verification of the bidirectional steel-PTFE friction model
6.1.1. Comparison to results given by the unidirectional model The results presented in section 5.1.1 obtained with the bidirectional model are very similar than
the ones given by the unidirectional model. The first test that was performed: a unidirectional oscillation with a constant angle to the horizontal axis actually gives the exact same results. Indeed, as stated in section 3.3.2, when the motion is as described by equation (3-26) (which was the case in that test), the bidirectional Bouc-Wen model equivalent test is strictly equivalent to the classical unidirectional one with the parameter 𝑛 = 2. This is also the value that was used in the unidirectional model.
The second test in which a flower-shaped motion having the same displacement amplitude as the unidirectional test was imposed to the bearing also gives very similar results. Extrema values for the displacement and the friction force are indeed equal. This is due to the fact that the displacement amplitude and the rate at which this amplitude is applied are the same for the unidirectional and the bidirectional tests. However, the shape of hysteresis loops differs around the corners. Indeed, even though the projected sliding velocities are the same for both tests as Figure 5-12 shows, the rotation to the movement that is introduced in the flower-shaped motion induces a difference in the evolution of the norm of the sliding velocity. This induces in turn a different evolution pattern for the coefficient of friction which is dependent on the norm of the sliding velocity and thus makes a slightly different shape for the resulting hysteresis loop.
6.1.2. Influence of the “knee-sharpness” parameter 𝒏 In the results presented in section 6.1.2, the hysteresis loops obtained with the unidirectional
friction model using 𝑛 = 1 overlap very nicely the hysteresis loops obtained with the bidirectional model and the unidirectional model using 𝑛 = 2. This shows that for the Bouc-Wen stiffness 𝑘0 and the stiffness ratio 𝑎 that were used in this simulation (cf. Table 4-5), the change from the value 𝑛 = 1 that was originally used in the existing unidirectional friction model (Ülker-Kaustell, 2017) to the “knee-sharpness” of the bidirectional model (equivalent to 𝑛 = 2) has almost no influence on the shape of hysteresis loops. From this perspective, the bidirectional model is thus consistent with the unidirectional model.

75
6.1.3. Comparison to the model proposed by Constantinou et al. (1990) The bidirectional friction model was compared to the model proposed by Constantinou et al. on
an eight-shaped motion simulation having the same specification as in the paper (Constantinou, Mokha, & Reinhorn, 1990). However, the model used by Constantinou et al. for calculating the coefficient of steel-PTFE friction gives outputs in a different range of values as the one used in the bidirectional friction model presented here. The model presented here is adapted to lubricated steel-PTFE friction while the one presented by Constantinou et al. models non-lubricated friction. In order to compare the outcomes of simulations carried out with both models, the friction force was normalized with respect to the maximum positive friction force obtained during the simulation.
The shape of hysteretic loops is very similar, especially for the simulation performed with a high sliding velocity. There are nevertheless some differences that are due to the evolution pattern of the coefficient of friction during the simulations. As explained in section 6.1.1, this impacts the values of the friction force.
6.2. Model for the dependency of the coefficient of friction on contact temperature
The contact temperature influence model presented in this thesis is based on experimental data that were collected by Dolce et al. regarding the influence of air temperature on steel-PTFE friction coefficient (Dolce, Cardone, & Croatto, 2005). No experimental data showing how contact temperature influences the coefficient of friction were found. As the tests conducted by Dolce et al. were short and performed at a controlled ambient air temperature, the assumption that contact temperature was close to air temperature during these tests was made in order to create the model presented here. However, the model is based on very few measurement points. Only nine experimental values were indeed made to create this model. The outcome values of this model are then mainly based on linear regressions and interpolations between these values as presented in section 4.2.2.
An alternative to this simple model is the model proposed by Kumar et al. in which the dependency of steel-PTFE friction coefficient on contact temperature is fitted by a decreasing power (i.e. exponential) function (Kumar, Whittaker, & Constantinou, 2015) (cf. section 2.2.5). Based on a greater quantity of experimental data than what has been used in this thesis, the model proposed by Kumar et al. could predict more accurately the evolution of steel-PTFE friction coefficient than the simple model based on linear regressions and interpolations presented here.

76
6.3. Model for estimating the increase in contact temperature in a sliding bearing
6.3.1. Contact temperature increase resulting from a train passage The simulations that were performed to estimate the temperature increase in a bearing on a
simplified model of the Banafjäl bridge and whose results are presented in section 5.2 indicate a significant temperature increase. The contact interface heated up by about 10°C in both simulations. This emphasizes the need for an accurate temperature influence model on the coefficient of friction in order to be able to predict at best the friction mechanisms in the sliding bearings. Besides, when introducing the temperature influence model developed in this thesis to the train passage simulation, a decrease by 12% of frictional heating was observed. This implies that it is non-conservative to ignore the temperature dependency of the coefficient of friction.
Although the contact temperature increase model presented in this thesis is directly derived from the theory of surface heating in semi-infinite bodies, it lies on the assumption that all the dissipated energy through friction is turned into heat that is transmitted either to the steel or the PTFE surface. In order to estimate the accuracy of this model, it needs to be validated with experimental data. However, the available scientific literature regarding steel-PTFE friction in sliding bearings lacks of such data. Some experiments and thermo-mechanical FEM simulations on friction pendulum bearings exist (Quaglini, Bocciarelli, Gandelli, & Dubini, 2014), (Han, Wen, Zhong, & Du, 2018), (De Domenico, Ricciardi, & Benzoni, 2018) but their concave geometry and the use of an additional rotation PTFE plate are not comparable to the single plane sliding surface in the models presented in this thesis.
6.3.2. Use of semi-infinite bodies to solve the heat equation As mentioned in sections 3.4 and 4.2.3, the model for calculating frictional heating at the sliding
interface is based on the resolution of the heat equation with semi-infinite bodies. The use of such bodies can be justified provided the depth of both the PTFE sliding plate and the surrounding steel body is large enough. The heat equation in semi-infinite bodies is a diffusion problem. For such problems, one can get an idea of how far the quantity of interest is diffused into the semi-infinite body by calculating the characteristic diffusion depth:
𝛿 = √𝐷𝑡 (6-1)
In equation (6-2), 𝐷 is the diffusivity (in m²/s) that appears in the diffusion equation of the problem. Here, the diffusion equation is the heat equation (3-31). The values 𝐷𝑠𝑡𝑒𝑒𝑙 and 𝐷𝑃𝑇𝐹𝐸 for the materials used in the model are given in Table 4-1. The depth 𝛿 is given as a function of time 𝑡: the longer a heat flux is applied on the surface, the deeper it will go into the semi-infinite body. As for the train passage on the Banafjäl bearing that is discussed in the previous section, the contact temperature increases for 9.4 seconds. This gives a characteristic diffusion depth 𝛿𝑠𝑡𝑒𝑒𝑙 = 6.8 mm for the

77
surrounding steel body and 𝛿𝑃𝑇𝐹𝐸 = 1.0 mm for the PTFE sliding plate. In comparison, the thickness of PTFE sliding plates that are used in pot bearings is usually 2-3 mm while the thickness of the surrounding steel body is worth a few centimetres. As both diffusion depths are much smaller than the thickness of the bodies, the use of semi-infinite bodies is justified in this particular case. For other cases, the use of semi-infinite bodies is justified provided the time condition (6-2) is verified for both surrounding with ℓ being the thickness of the body:
𝑡 ≪ℓ2
𝐷 (6-2)
6.4. Bridge response to an impulse load The impulse load having components in vertical and transverse bending as well as torsion was
applied at the middle of the Banafjäl bridge’s span. The acceleration of quarter and middle points of the bridge were then analysed with a Fast Fourier Transform and the first resonance modes and their frequencies were estimated from the locations of peaks. These are presented in Table 5-1. In 2005, the actual first resonance frequencies of the Banafjäl bridge were measured on the structure by research team from KTH (James, Karoumi, Kullberg, & Trillkott, 2005). The measured frequencies correspond to peaks in the logarithmic Average Normalized Power Spectral Density shown in Figure 6-1.
Figure 6-1 - Logarithmic Average Normalized Power Spectral Density for measurements performed on the Banafjäl bridge by (James, Karoumi, Kullberg, & Trillkott, 2005)

78
The frequencies obtained from the analysis of the bridge response during the impulse load simulation do not match the natural frequencies that were measured on the Banafjäl bridge. This may be due to the inaccuracy of the model. The structure has indeed been simplified to be modelled with beam elements for its main part while the ends are modelled with shell elements using an equivalent steel section of the bridge. Besides the simplification of the bridge for running the simulations, some values of the equivalent steel section such as the shear modulus for instance may produce inaccurate results. Three-dimensional bridge modelling work on the Banafjäl bridge might improve the estimation of these frequencies.

79
7. Conclusions 7.1. Outcome of this thesis During this thesis, the sliding bearing finite element developed in previous studies has been
extended in several aspects. Firstly, the unidirectional steel-PTFE friction model based on the Bouc-Wen model has been upgraded to account for friction in two directions thanks to the bidirectional generalization of the Bouc-Wen model, sometimes referred as the Park-Wen model. Secondly, the model for calculating the coefficient of friction of steel-PTFE has been extended to account for the influence of contact temperature. This extension is based on experimental data found in the literature. In order to make it possible to calculate the coefficient of friction with the influence model, a frictional heating model to update the contact temperature was also implemented. This model is derived from the theory of surface heating of semi-infinite bodies.
The three models were implemented in the Fortran subroutine that defines the user element for Abaqus. The friction model has been verified on simple cases and compared to the existing model. It has also been validated in comparison to another steel-PTFE friction model that is also based on the bidirectional Bouc-Wen model and used for seismic isolation purpose in bridge sliding bearings. The extended sliding bearing finite element has been incorporated in bridge models of the Banafjäl bridge, a railway bridge located on the Bothnia line, in northern Sweden. The frictional heating model enabled the estimation of the increase in temperature in a sliding bearing. This estimated increase being significant highlights the utility of the temperature influence model to calculate the coefficient of friction of steel-PTFE. Without it, the simulated frictional behaviour may indeed not be accurate. Finally, the element has also been used to estimate the fundamental resonance modes and their related frequencies. On the model of the bridge that was used, estimations do however not match measurements that were made on the actual bridge.
7.2. Further work The work made within this Master Thesis project could be continued in several ways. Works on
three-dimensional bridge modelling could be conducted in order to know whether more accurate models of the bridge enable a better estimation of the resonance frequencies. This could eventually lead to determination of guidance rules for integrating the sliding bearing finite element in a bridge model for estimating resonance modes. As the contact temperature increase that can occur within sliding bearings seems significant, it could also be interesting to improve the temperature influence model on steel-PTFE friction coefficient in order to be able to predict more accurately the frictional behaviour of sliding bearings. To do so, gathering more experimental data and using a function that better matches the temperature influence curve such as the model presented in section 6.2. Lastly, the temperature increase estimations could be confirmed or infirmed by performing experiments on isolated sliding bearings or maybe on bearings that are incorporated in a real structure such as the Banafjäl bridge for instance.

80
References Bouc, R. (1967). Forced vibration of mechanical systems with hysteresis. Proceedings of the Fourth
Conference on Non-linear oscillation. Prague, Czechoslovakia.
Bouc, R. (1969). Modele mathematique d'hysteresis : application aux systemes a un degre de liberte (In French). Doctoral Thesis, Aix-Marseille University, Marseille, France.
Carslaw, H. S., & Jaeger, J. C. (1947). Conduction of heat in solids. Oxford, United-Kingdom: Clarendon Press.
CEN - Comité Européen de Normalisation (European Committee for Standardization). (2005). EN 1337-2:2005 - Structural Bearings - Part 2: Sliding elements. Brussels, Belgium.
CEN - Comité Européen de Normalisation (European Committee for Standardization). (2005). EN 1337-5:2005 - Structural bearings - Part 5: Pot bearings. Brussels, Belgium.
Chang, J., Hwang, J., & Lee, G. (1990). Analytical model for sliding behavior of Teflon-stainless steel interfaces. Journal of Earthquake Engineering, 116(12), pp. 2749-2763.
Charalampakis, A., & Koumousis, V. (2008). On the response and dissipated energy of Bouc-Wen model. Journal of Sound and Vibration, 309(3), pp. 887-895. doi:10.1016/j.jsv.2007.07.080
Constantinou, M. C., Whittaker, A. S., Kalpakidis, Y., Fenz, D. M., & Warn, G. P. (2007). Performance of seismic isolation hardware under service and seismic loading. Report No. MCEER-07-0012, Multidisciplinary Center for Earthquake Engineering Research, Buffalo, NY, USA.
Constantinou, M., & Adnane, M. (1987). Dynamics of soil-base-isolated structure systems: Evaluation of two models for yielding systems. Report to NSAF, Drexel University, Philadelphia, PA, USA.
Constantinou, M., Caccese, J., & Harris, H. (1987). Frictional characteristics of Teflon-steel interfaces under dynamic conditions. Earthquake engineering & structural dynamics, 15(6), pp. 751-759.
Constantinou, M., Mokha, A., & Reinhorn, A. (1990). Teflon Bearings in Base Isolation I: Testing. Journal of Structural Engineering, 116(2), pp. 438-454. doi:10.1061/(ASCE)0733-9445(1990)116:2(438)
Constantinou, M., Mokha, A., & Reinhorn, A. (1990). Teflon Bearings in Base Isolation II: Modelling. Journal of Structural Engineering, 116(2), pp. 455-474. doi:10.1061/(ASCE)0733-9445(1990)116:2(455)
De Domenico, D., Ricciardi, G., & Benzoni, G. (2018). Analytical and finite element investigation on the thermo-mechanical coupled response of friction isolators under bidirectional excitations. Soil Dynamics and Earthquake Engineering, 106, pp. 131-147.

81
Dolce, M., Cardone, D., & Croatto, F. (2005). Frictional Behavior of Steel-PTFE Interfaces for Seismic Isolation. Bulletin of Earthquake Engineering, 3(1), pp. 75-99. doi:10.1007/s10518-005-0187-9
Han, Q., Wen, J., Zhong, Z., & Du, X. (2018). Numerical Simulation of Frictional Heating Effects of Sliding Friction Bearings for Isolated Bridges. International Journal of Structural Stability and Dynamics, 18(8). doi:10.1142/S0219455418400084
Harvey, P. S., & Gavin, H. P. (2014). Truly isotropic biaxial hysteresis with arbitrary knee sharpness. Earthquake Engineering & Structural Dynamics, 43, pp. 2051-2057. doi:10.1002/eqe.2436
James, G., Karoumi, R., Kullberg, C., & Trillkott, S. (2005). Measuring the Dynamic Properties of Bridges on the Bothnia Line. TRITA-BKN. Report 92, KTH Royal Institue of Technology, Stockholm, Sweden.
Kumar, M., Whittaker, A. S., & Constantinou, M. C. (2015). Characterizing friction in sliding isolation bearings. Earthquake Engineering & Structural Dynamics, 44, pp. 1409-1425. doi:10.1002/eqe.2524
Lomiento, G., Bonessio, N., & Benzoni, G. (2013). Friction Model for Sliding Bearings under Seismic Excitation. Journal of Earthquake Engineering, 17(8), pp. 1162-1191. doi:10.1080/13632469.2013.814611
Marin-Artieda, C., Whittaker, A., & Constantinou, M. (2007). Experimental and Analytical Study of the XY-Friction Pendulum (XY-FP) Bearing for Bridge Applications. Technical Report MCEER-07-0009, State University of New York, Buffalo, NY, USA.
Nakahara, T. (2005). A model of seizure based on Burwell and Strang's concept of wear mode transition. Tribology and Interface Engineering, 48, pp. 547-553.
Park, Y., Wen, Y., & Ang, A.-S. (1986). Random vibration of hysteretic systems under bi-directional ground motions. Earthquake Engineering & structural dynamics, 14(4), pp. 543-557.
Quaglini, V., Bocciarelli, M., Gandelli, E., & Dubini, P. (2014). Numerical Assessment of Frictional Heating in Sliding Bearings for Seismic Isolation. Journal of Earthquake Engineering, 18(8), pp. 1198-1216. doi:10.1080/13632469.2014.924890
Shu, J., Zhang, Z., Gonzalez, I., & Karoumi, R. (2013). The application of a damage detection method using Artificial Neural Network and train-induced vibrations on a simplified railway bridge model. Engineering Structures, 52, pp. 408-421.
Tyler, R. (1977). Dynamic tests on PTFE sliding layers under earthquake conditions. Bulletin of the New Zealand National Society for Earthquake Engineering, 10(3), pp. 129-138.
Ülker-Kaustell, M. (2013). Essential modelling details in dynamic FE-analyses of railway bridges. Doctoral Thesis. TRITA-BKN. Report 120, KTH Royal Institute of Technology, Stockholm, Sweden.

82
Ülker-Kaustell, M. (2017). Dynamic behaviour of pot bearings: A preliminary study. TRITA-BKN. Report 168, KTH Royal Institute of Technology, Stockholm, Sweden.
Wang, C.-H., & Wen, Y.-K. (2000). Evaluation of Pre-Northridge Low-Rise Steel Buildings - I: Modeling. Journal of Structural Engineering, 126(10), pp. 1160-1168.
Wen, Y. (1976). Method for random vibration of hysteretic systems. Journal of Engineering Mechanics Division, 102(2), pp. 249-263.

TRITA ABE-MBT-20672
www.kth.se






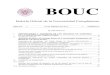




![A NEW MODIFIED PARAMETRIC ALGEBRAIC MODEL FOR ... full.pdfviscoelastic-plastic model based mostly on the Bingham model [18], the Bouc–Wen model [19], non-parametric models [20],](https://img.pdfslide.net/doc/110x75/60133bcd7aa3a37b7233728b/a-new-modified-parametric-algebraic-model-for-fullpdf-viscoelastic-plastic.jpg)