Embed Size (px)
Citation preview

A Bayesian Approach to Conceptualization and Place Classification:Incorporating Spatial Relationships (distances) to Infer Concepts
Shrihari Vasudevan and Roland SiegwartAutonomous Systems Laboratory
Swiss Federal Institute of Technology Zurich8092 Zurich, Switzerland.
{shrihari.vasudevan,r.siegwart}@ieee.org
Abstract— The future of robots, as our companions is de-pendent on their ability to understand, interpret and representthe environment in a human compatible manner. Towardsthis aim, the presented work is part of an attempt to createa hierarchical probabilistic concept-oriented representation ofspace, based on objects. Specifically, this work details effortstaken towards learning and generating concepts and attemptsto classify places using the concepts gleaned. Inference is basedon the number of occurrences of various objects. The approachis based on learning from exemplars, clustering and the useof Bayesian network classifiers. Such a conceptualization andthe representation that results thereof, will enable robots to bemore cognizant of their surroundings and yet, compatible to us.Experiments on conceptualization and place classification arereported. Thus, the theme of the work is - conceptualizationand classification for representation and spatial cognition.
I. INTRODUCTION
Robot mapping is a well researched problem, however,with many very interesting challenges yet to be solved. Anexcellent and fairly comprehensive survey of robot mappinghas been presented in [1]. Robot maps can be generallyclassified into three categories - metric ([2],[3]), topological([4], [5]) and hybrid ([6], [7]). The one similarity betweenall these representations is that all of them are navigation-oriented. Thus, while these maps are certainly useful ingetting robots to move around, they fail to encode muchof the spatial semantics in the environment. This results inrobots having a very modest level of spatial awareness. Thefocus of this work is to address this deficiency. Further,a robot may use such representations to perform spatialcognition to different extents. While (metric) localizationand place recognition (is this my office ?) have been wellexplored ([2], [5] & [8]) in the research community, placeclassification (is this an office ?) is a more general problemand warrants the formation of a conceptual model of theplace. The work reported here addresses this issue in theoverall context of improving the semantic content of state-of-the-art robot representations.
Typically, humans seem to perceive space in terms ofobjects, states and descriptions, relationships etc. This seemsboth intuitive and is also validated through user studies thatwere conducted in [9]. Thus, a cognitive spatial representa-tion, for a mobile robot, could be expected to encode similarinformation. The work reported in [10] attempted to create
such a representation by encoding typical household objectsand doors within a hierarchical probabilistic framework. Itused a SIFT [11] based object recognition system and a doordetection system based on lines extracted from range scans.It also proposed a first conceptualization of different places,based on the objects that were observed. Spatial cognitionwas demonstrated in two ways - place classification using themodels learnt and place recognition using the probabilisticrelative object graph representation (a graph encoding objectsand 3D relative spatial information between them). Theconceptualization and place-classification that was performedwere preliminary steps in the direction. This work attemptsto build on that representation by endowing a robot with thecapability to form functional concepts of places based on theobjects and inter-object relationships that it perceives. Forinstance, consider a kitchen that is composed of a storage-space, a cooking-space and a dining-space, each of which arein turn composed of several objects pertinent to it. This workenables a robot exploring the kitchen to actually understand(and internally represent) that there is an area to dine, tocook and to store things in the place, and that the place is akitchen because of this.
II. RELATED WORK
Many works either inspire or are closely related to thework presented here. In the artificial intelligence (AI) com-munity, the problem of generalization has been well ad-dressed. The work [12] provides a good overview of differentgeneralization strategies that exist and how they relate toeach other. The approach presented in this work can belikened to a data driven approach which requires a set ofpositive / negative exemplars (or a “teacher”) to learn from.The problem of conceptual clustering is another closelyrelated and well established research area. Perhaps, thebest known example of this, is the COBWEB system [13].This system attempted to perform unsupervised incrementalprobabilistic conceptual clustering. The problem, approachand the methodology of generating and using probabilitiesis different from that presented here. Among more recentworks, the aspects dealt with in this work, bear similaritieswith [14]. This work presented a generative probabilisticmodel for classification and clustering of relational data.The model is based on previous work by the authors on

Probabilistic Relational Models. The model incorporatesa large set of dependencies between the latent variablesrepresenting the entities of the data; it used an approximateExpectation-Maximization algorithm to learn the parametersof the underlying model and the inference was based onBelief Propagation. Another closely related work, to thatpresented here, is reported in [15]. It provides a Bayesianapproach to learning concepts from a few positive exemplars.The specific example demonstrated is that of learning axis-parallel rectangles in multi-dimensional space.
Recent works in robotics that are relevant in the contextof this work include [16] and [17]. The former used an AIbased reasoning engine that specified rules for each conceptbased on an ontology. The latter used the object occurrencesto differentiate between similar structured rooms. This wasdone by integrating the object cues within an AdaBoost basedclassifier that differentiated between rooms, corridors anddoorways on the basis of laser scan profiles. The state-of-the-art in robot place classification typically relies on objectoccurrence cues, used in a logic or rule based framework,possibly with a predefined ontology. A recent contributionthat works along these lines is detailed in [18]. The ob-jective of this work is to formulate a principled Bayesianapproach in order to incorporate semantic concepts in robotspatial representations and enable robots to reason abouttheir surroundings. The approach is not ontology specific andrelies on a robot’s inherent object recognition capability. Thescenario envisioned is that of a robot being taught differentconcepts by its human user.
A concept that provides for the basis of the approachpresented here is that of the Bayesian network classifiers -in particular, the Naive Bayesian Classifier (NBC). It is wellknown that NBC’s (generative classifiers) although beingunarguably simplistic models that make strong assumptions,are able to successfully compete with any of the other state-of-the-art (discriminative) classifiers [19]. The work [20]gives a nice overview on the different kinds of Bayesiannetwork classifiers that exist and also elicits on ways to learnthem. The approach presented in this report also draws onthe vast amount of work done in the area of clustering, agood survey of which is presented in [21]. Additionally, thiswork attempts to be fully probabilistic and is grounded on aBayesian Programming methodology, as described in [22].
The contribution of this work is the formulation of a soundBayesian methodology to enable a robot to conceptualizeand classify its environment as it explores it - specifically,this work details the incorporation of spatial relationships(currently, inter-object distances) towards inferring concepts.The representation formed as a result of the conceptualiza-tion, would encode a greater level of semantic information(concepts) than before and would enable a robot to be morespatially aware of its surroundings. Also, the representationwould be totally compatible with humans (demonstrated in[9]).
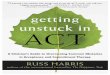
(a) (b)
Fig. 1. (a) General approach - A robot uses the sensory information itperceives to identify high level features such as objects, doors etc. Theseobjects are grouped into abstractions along two dimensions - spatial andsemantic. Along the semantic dimension, objects are clustered into groupsso as to capture the spatial semantics. Along the spatial dimension, places areformed as a collection of groups of objects. Spatial abstractions are primarilyperceptual formations (occurrence of walls, doors etc.) whereas semantic orfunctional abstractions are primarily conceptual formations (similarity ofpurpose / functionality ; spatial arrangement). The representation is a singlehierarchy composed of sensory information being mapped to increasinglyabstract concepts. (b) An example scenario - The figure depicts a typicaloffice setting. The proposed approach would enable a robot to recognizevarious objects, cluster the respective objects into meaningful semanticentities such as a meeting-space and a work-space and even understandthat the place is an office because of the presence of a place to work andone to conduct meetings.
III. APPROACH
A. Overview
Figure 1 illustrates the overall approach that is beingpursued. In [10], a key idea was to enhance robots spatialrepresentation by changing the feature set from the now com-mon lines, corners etc. to higher level features such as objectsand doors. It established the link between the robots sensors,the objects and the places. This work attempts to build onthat idea by asking the question - given a set of objects, howcan a robot be made to gain a deeper understanding of itssurroundings ? It attempts to form groups in accordance withthe hierarchy shown. The objective is a greater incorporationand usage of spatial semantics, thereby producing a conceptoriented (thus, more semantic) representation of space. In thisreport specifically, two questions are addressed - (1) How cana robot build a conceptual model of the functional entitiesthat constitute a place ? and (2) How can a robot understandthat it is in a particular type of place ? The former refers tothe problem of conceptualization and the latter, the problemof place classification.
In accordance with figure 1(a), objects are incrementallygrouped into clusters which are conceptualized as functionalgroupings (concepts or groups in this report). These groupsprovide for meaningful semantics that the robot can gleanas it explores a place. The robot can then use the groupsto infer about or classify the place. Inference is based onthe Naive Bayes Classifier (NBC). The key improvementlies in the creation of an intermediate level of semanticunderstanding, which certainly increases semantic contentin the representation but may also improve understanding athigher levels of abstraction. The following sub-sections detailthe clustering methodology used, the conceptual model, and

Fig. 2. An overview of different attempted approaches to conceptualization and place classification.
the conceptualization process.The work presented here is the most recent advancement
made in a series of works addressing the aforementionedproblems. The first preliminary steps (M1 in figure 2) to-wards object based classification were made in the work[10]. The classification was based on a very simplisticNaive Bayesian Classifier (NBC) [23] that did not learnfrom negative exemplars. The likelihood formulation in theconceptualization was not useful for handling multiple occur-rences of objects. Classification was done only on the basisof the evidence that was present and did not consider thatwhich was absent, the latter is very significant information.Thus, the work [10] represented spatial semantics throughonly the presence of objects. In order to get around theseproblems, the work [24] modeled the importance of differentobjects towards the formation of different concepts (M2 infigure 2). This was done by appropriately modeling therelative number of occurrences of an object to that of theconcept. While this work could overcome the previouslymentioned problems, it had the drawback of having a lowclassification rate, even if the correctness of the classifiedcases was very high. Conceptually, the importance modelgave each occurrence of every object the same contributiontowards a particular concept. This most probably explainedthe low classification rate as, for the same evidence, multipleconcepts could be inferred and no clear outcome would thusbe observed. In order to get over this problem and proposea more explicit model for inferring concepts, the work [25]was performed. In it, the learnt knowledge explicitly modeledthe contribution of a certain number of occurrences of eachobject towards a particular concept (M3 in figure 2). Thiswork produced very encouraging results in terms of both theclassification rate as well as the correctness of the classifiedcases. In an attempt to build on the representation proposedin [10] and the promising results obtained in [25], in thiswork, an extension to using spatial relationships (currently,inter-object distances) is proposed (M4 in figure 2).
Note that all of the information that is used in the cognition
process is directly obtained from the representation (map)that a robot would form when it explores its surroundings -in this way the presented work remains grounded and buildson a robot mapping basis. It assumes that a robot can detectobjects (currently demonstrated using a SIFT based objectrecognition system applied on real sensory data in [10]) andthat a human user would show the robot around in a “hometour” scenario annotating semantic entities suited to them.The robot would use its feature extraction (object detection)capabilities in conjunction with the semantic annotationsprovided to learn models of these concepts, based on theapproach presented here. Note also, that perception is notthe thrust of this work; rather its the creation of a semanticmap for a mobile robot.
B. On the clustering methodology
The conceptualization process to actually infer the con-cepts works on clusters of objects. Different clustering ap-proaches inspired by [21] were attempted. Most were basedon nearest neighbor approach as distance between objectswas a reasonable metric to cluster them. The objective,however, was to also make use of the semantic informationcaptured in the concept models learnt by the robot. Thus,for each perceived object, a nearest neighbor approach inconjunction with a Maximum-a-posteriori (MAP) estimateof the best case concept suggested by the concept modelslearnt, was the basis of the clustering method that has finallybeen used in this work. The former used the distance to thecenter of the cluster as the metric whereas the latter wasthe concept that had the maximum posterior belief given theoccurrence of the single object (it is computed by learning,from the training data, the likelihood of observing the object,given the occurrence of the concept - based on model M2in figure 2). The behavior of the algorithm can be brieflysummarized in three steps in the same order of precedence- (1) choose the nearest cluster that has the same conceptas the best case concept suggested for the perceived object,(2) choose the nearest cluster that is conceptually dissimilar

but “acceptably likely” with respect to the best case conceptand (3) create a new cluster with the incoming object of typesuggested by the best case concept. More details on this canbe obtained from [24].
C. The Concept Model and Conceptualization
P ( c , X1...n1 , R1...n2) = P ( c ) ∗n1∏i=1
P (Xi | c)
∗n2∏
j=1
P (Rj | c) (1)
Equation 1 shows the joint probability distribution (JPD)of the model used in this work. Given a set of objects (oi),the equation computes the belief in a concept given numberof occurrences (mi) respectively, of each of the objects andthe relationships Rj observed between the objects. Every Xi
in the equation denotes an oi = mi for the correspondingobject; c denotes the concept that is to be inferred and aRj denotes a relationship between two objects. In this work,only the distances between objects in 3D space are usedtowards inferring concepts. These spatial relationships arein-line with our choice of representation and are available tothe robot as it constructs the representation of the space inaccordance with [10]. They are meant to metrically capturetypical spatial relationships that are used to describe theconfiguration of a group of objects - e.g. near, above, to theright of etc. The inference is principled on the Bayes rulethat interprets it in terms of the prior belief in the concept, thelikelihoods of observing the specific number of occurrencesof the respective objects, given the concept and the likelihoodof observing the specific relationship given the concept.Given that a NBC is the underlying model, the numbersof object occurrences and the individual relationships areassumed to be independent of each other, given the concept.The same method (currently, without relationships) is alsoused to infer about the place given the occurrence of one ormore concepts.
The concept model for objects, encodes the likelihood ofthe occurrence of a specific number (over a range, in thecluster under consideration) of a certain object towards theformation of a particular concept. It is worth noting thatencoding and using the number of occurrences of variousobjects rather than just their individual occurrences is a moreinformative method of distinguishing between concepts. Forinstance, chairs and tables are common to both a work-spaceand a dining-space, however, the number of occurrencesof each of them is one distinguishing factor. For a set ofconcepts ci, a set of objects oi and a range of possiblenumber of occurrences mi, the training process uses acollection of positive and negative concept exemplars tocompute the likelihoods as shown in equation 2.
P (oi = mi | ci) =Noi = mi
+ δ
N( + /− ) exemplars + (2 ∗ δ)(2)
where the numerator encodes the number of occurrencesof the particular case oi = mi, for every object over a rangeof occurrences, and the denominator encodes the number ofpositive or negative exemplars of the concept. The terms δand 2 ∗ δ ensure that an event that has not been encounteredduring prior training, is only something that the robot hasno prior information about (belief = 0.50) and not somethingthat may never occur. The value of δ decides the reliance onthe training data. In the experiments reported in this work, δtakes a very low value of 0.001 so as to reflect the trainingdata accurately. The likelihoods were also limited to takingvalues between upper and lower bounds in order to avoid ‘un-interesting’ inferences that could be produced in the limitingcases. Also, as detailed in [25], a Gaussian uncertainty isincorporated in the learning of the object models. Thus,every training exemplar for learning P (oi = mi|c) not onlyaffects the case of oi = mi but also the neighboring states ofoi = mi − 1 and oi = mi + 1. This was shown to providesuperior generalization capability in that it could handle“conceptually adjacent” cases. Further, it also incorporated afixed uncertainty in the learning of the training input, whichmade it more suited to the context of real-world scenarios.
The concept model for relationships is learnt as a Gaussianmixture model (GMM) from the relationship values. Whileobject occurrence models are based on discrete variables,the relationship models are formed from continuous ran-dom variables. The relationship models are learnt by takingall previous occurrences of the relationship and using theExpectation Maximization (EM) algorithm [26] to learnthe GMM parameters for that relationship. Of the manyrelationships that actually exist, those that are to be modeledare selected using the number of occurrences as a measureof their significance. The reasoning behind the use of theGMM to model spatial relationships between objects is -the method attempts to capture the few relationships that aretypically maintained between objects. Each of these typicalrelationships may possibly occur in a few characteristicvalues. The objective of this modeling is to identify whichspatial relationships are significant enough and which valuesof these relationships occur most often.
It must be noted that the relationship data that are used forthe learning step include its value and uncertainty (covariancematrix representation; detailed in [10]). The EM algorithm isadapted to include the uncertainty in the input data as donein [27]. The update equations can be derived by minimizingthe KL-divergence or maximizing the log likelihood over thedataset. The final result obtained is depicted in equations 3through 6 using the convention followed by [26]. They arequite similar to the standard equations. N data items (xn
with dimensionality d) are assumed to be modeled usingK Gaussian mixture components of the model, defined bymodel parameters πk (prior), µk (mean) and Σk (covari-ance matrix). γ(znk) denotes the responsibilities of the kth
mixture component explaining the nth data item. Finally,Cn denotes the uncertainty of each of the data items to beclustered. The parameters of the GMM are obtained throughan iterative expectation-maximization process that ends when

the model parameters converge.
γ(znk) =πk . p(xn|znk = 1; θ)∑Kj=1 πj . p(xn|znj = 1; θ)
(3)
where
p(xn|znk = 1; θ) = 2π−d/2 . Σ−1k .
exp{−0.5 ∗ (xn − µk)T .Σ−1k .(xn − µk)
−0.5 ∗ Tr(Σ−1k .Cn)}
µknew =
∑Nn=1 γ(znk) xn∑N
n=1 γ(znk)(4)
Σknew =
∑Nn=1 γ(znk) [(xn − µk
new)′.(xn − µknew) + Cn]∑N
n=1 γ(znk)(5)
πknew =
∑Nn=1 γ(znk)
N(6)
Visual inspection of some of the relationship data sug-gested that relationships that had little diversity (typicallyalso the infrequent ones) could be modeled using a singleGaussian mixture whereas some of the more frequentlyoccurring ones having diverse values, with two or moreGaussian mixture components. The exact number of Gaus-sian mixture components required to model the relationshipis dependent on the dataset. Thus, the Bayesian informationcriterion (BIC) [28] was used to decide the number ofmixture components used to model a particular relationship.
A relationship is selected for modeling based on itssignificance (directly decided by the number of occurrencesof it). Thereafter it is subject to an EM based GMM modelingprocedure. Finally, the relationship is also subjected to a post-modeling test which decides if it is actually used or not. Inorder to ensure that the modeling is appropriate, a parametricbootstrap approach was adopted to check the modeling.Samples were generated using the GMM parameters obtainedfrom the EM procedure. These samples together with theoriginal data are together again subject to the EM basedGMM modeling and the resulting GMM is compared withthat obtained previously. A students t-test is performed tocompare the two GMM’s. Only if the parameters are equalat a certain level of significance, is the modeling taken tobe appropriate and the relationship model used thereafterfor inference. The null hypothesis in this case was thatthe GMM models were identical. In this report, a 1%level of significance is used in a two tailed testing of theGMM models. Cases where the null hypothesis is rejectedat the given level of significance result in the correpondingrelationship being discarded from the relationship modelsthat are used thereafter for the inference process.
A Bayesian program is a systematic formulation for thecreation and usage of Bayesian models such as the one usedin this work. Elaborate details on the concept, its structureand its semantics are available in [22]. The Bayesian programused to do the learning and inference process is summarized
Variables
c , X1...n1 , R1...n2 where Xi ≡ oi = mi
i.e. Xi ≡ mi occurrences of object oi and c ≡ the concept.and Ri is a relationship occurring between two objects
DecompositionP ( c , X1...n1 , R1...n2) = P ( c ) ∗
n1∏i=1
P (Xi | c)
∗n2∏
j=1
P (Rj | c)
Parametric Forms
P (c) →
P ([c = 0]) = (nf + δ
nf + nt + 2δ )
P ([c = 1]) = (nt + δ
nf + nt + 2δ )
P (Xi | c) →
P ([Xi = 0]|[c = 0]) = 1−nfi + δ
nf + 2δ
P ([Xi = 0]|[c = 1]) = 1− nti + δ
nt + 2δ
P ([Xi = 1]|[c = 0]) =nfi + δ
nf + 2δ
P ([Xi = 1]|[c = 1]) =nti + δ
nt + 2δ
P (Rj | c) →
P (Rj |c = 0) = Uniform(Rj)is a uniform distribution
P (Rj |c = 1) = GMM(Rj)GMM(x) = N(x; πj , µj , Σj)is the learnt Gaussian mixture model
Identification → Parameters learned during the training process
Question → P (c|X1...n1, R1...n2)
Fig. 3. The Bayesian program that summarizes the conceptualizationand classification processes. It is characterized by the specification ofthe variables of the system, the decomposition of the joint probabilitydistribution (JPD), the parametric forms of each of the components of theJPD, a specification of how the parameters of the distributions are learntand finally, the question that is to be answered by the system. ‘0’ denotesa ‘false’ and ‘1’ denotes a ‘true’. δ = 0.001 to accurately reflect on thetraining data, it ensures that a previously unseen event is an unknown event(belief = 0.5) and not one that never occurs. nfi and nti are the numberof occurrences of the case oi = mi in negative and positive exemplarsrespectively. nf and nt are the number of negative and positive exemplarsrespectively. The same process can be applied to infer about places giventhe concepts observed. π, µ and Σ are respectively the prior, mean andcovariance of the GMM representation of the jth relationship Rj .
as shown in figure 3. The complete probabilistic model forthe system, including the parameters, likelihoods and thequestion to be answered, are depicted in it.
IV. EXPERIMENTS
A. Overview
Experiments were conducted on a dataset that includedphysically measured object and coordinate information from11 offices and 8 kitchens. The office data was representedin terms of three concepts (apart from some free-standingobjects). These were work-space, storage-space and meeting-space. The kitchen data was described in terms of ten con-cepts, namely cooking-space, garbage-space, dining-space,bottle-group, glass-group, box-group, mug-group, bag-group,

poster-group and book-group. Concepts used in this workrepresent the manner in which the places were understoodby the authors; they are similar to those observed in [9]. Theapproach however is not ontology-specific.
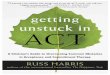
Two instances each, of office and kitchen data were usedonly for testing and the others for both training and testing.Training was performed to learn the unknown parametersshown in figure 3, for each concept. Each concept wastrained with its set of positive exemplars and against allother exemplars as negative ones. Testing and evaluationinvolved the comparison of each of the 991 objects (totalnumber in 19 places) with the corresponding objects inthe training input. The clustering process plays a criticalpart in correct conceptualization. In order to understandthe effect of incorporating relationships to the system, theclustering process used here (parameters etc.) has been keptidentical to that in [25]. Conceptualization resulted in fouroutcomes. An object may have been conceptualized correctly,i.e. it belongs to the correct conceptual group with respectto the training data; it may belong to a group that hasnot been classified (due to insufficient evidence or multiplecompeting hypotheses inhibiting a clear inference); it couldbe a free-standing object in training, that has been assigneda label; finally, the object may belong to a group that hasbeen incorrectly classified. Figure 4 depicts the outcomeof clustering, conceptualization and place classification ofa kitchen.
B. Evaluating the clustering algorithm
TABLE IEVALUATION OF THE CLUSTERING ALGORITHM
Outcome Cases Percentage (%)Singleton 11 1.1100
Fused or Broken 296 29.8688Correct 684 69.0212
Table I summarizes the evaluation of the clustering pro-cess. Correct cases correspond to objects which belongedto the respective clusters, in comparison with the trainingdata. A significant number of clusters were either fusedor broken with others. In most cases, this resulted in forinstance, the fusion of two adjacent work-spaces or theinclusion of one or more objects of one cluster in anotherone. There were cases however, where objects characteristicof one concept were clustered with those of another. A clearconceptualization would be unlikely in these cases. A fewobjects were separated from the rest and formed clusters bythemselves - these were regarded as being inaccurate withrespect to the training input (where only large objects suchas cupboards were treated as singleton clusters). The numberof such cases however, was quite low.
C. Evaluating the conceptualization algorithm
The experiments attempt to understand two aspects of theapproach - (1) the effect of incorporating spatial relationships(specifically, the distance) on the conceptualization outcome(2) the effect of varying the minimum required number of
samples (hereafter denoted as NOCC) for a relationshipto be considered significant enough to be included in themodel. As a benchmark, table II depicts the outcome of theconceptualization when only the objects are used - the objectcount model (with Gaussian improvement) detailed in [25].
TABLE IIEVALUATION OF THE CONCEPTUALIZATION ALGORITHM
OBJECT MODEL ONLY [25]
Outcome Cases % (of classified) % (of total)Incorrect 175 18.5381 17.6589
Not classified 47 -. 4.7427Free Object 9 0.9534 0.9082
Correct 760 80.5085 76.6902
The approach was evaluated for different cases of NOCC.The results are tabulated in the tables III through VI. Placeclassification (of the 19 places) was also compared betweenthese models and these results are quantified in table VII.
TABLE IIIEVALUATION OF THE CONCEPTUALIZATION ALGORITHM
(MODEL A : NOCC = 5)
Outcome Cases % (of classified) % (of total)Incorrect 118 16.2311 11.9072
Not classified 264 - 26.6398Free Object 9 1.2380 0.9082
Correct 600 82.5309 60.5449
TABLE IVEVALUATION OF THE CONCEPTUALIZATION ALGORITHM
(MODEL B : NOCC = 10)
Outcome Cases % (of classified) % (of total)Incorrect 122 15.1365 12.3108
Not classified 185 - 18.6680Free Object 9 1.1166 0.9082
Correct 675 83.7469 68.1130
TABLE VEVALUATION OF THE CONCEPTUALIZATION ALGORITHM
(MODEL C : NOCC = 20)
Outcome Cases % (of classified) % (of total)Incorrect 126 14.4495 12.7144
Not classified 119 - 12.0081Free Object 9 1.0321 0.9082
Correct 737 84.5183 74.3693
The addition of relationships adds extra metrics for con-ceptualization/classification to the system. This has the effectof reducing the number of false positives and increasingthe number of true-positives (column 3 of the tables) whencompared with table II. This is a good outcome and oc-curs because the extra information (relationships) helps tobetter discern “uncertain” clusters of objects. The numberof unclassified cases increases (column 4 of the tables).This can be explained as: uncertain cases which might havequalified with the object models alone, may fail with the

TABLE VIEVALUATION OF THE CONCEPTUALIZATION ALGORITHM
(MODEL D : NOCC = 30)
Outcome Cases % (of classified) % (of total)Incorrect 139 15.4102 14.0262
Not classified 89 - 8.9808Free Object 9 0.9978 0.9082
Correct 754 83.5920 76.0848
TABLE VIIEVALUATION OF THE PLACE CLASSIFICATION ALGORITHM
Model Correct cases (of 19) % accuracyA 19 100.00B 19 100.00C 19 100.00D 19 100.00
relationship models now included. However, the total numberof incorrect cases is also significantly lower than in table II.Inability to conceptualize is a better outcome than incorrectconceptualization.
The higher the value of NOCC, the fewer the number ofrelationships that are included in the relationship model. Butthe ones that are included, are frequently observed, probablyworth modeling and probably better modeled (more data).These could be distinctive “features” that would be useful forplace classification. However, the side effect of this (only forthe dataset used here) would be that some concepts such asmeeting-space and dining-space would have little distinction(in terms of relationships) as they are quite infrequentlyobserved (few relationships) in comparison to a conceptsuch as work-space. Clearly from tables III, IV, V and VII,higher values of NOCC produce superior results both interms of false-positives / true-positives (column 3) and theclassification rates (column 4). In terms of classification rate,the higher the value of NOCC, the closer the system behavesto the work presented in [25] (table II). Lower values ofNOCC (NOCC = 5) were specifically attempted to observethe behavior of the system by including as many relationshipsas possible. From table VI, we see a slight decrease inperformance. The reason is that fewer relationships are nowincluded in the concept model. As NOCC increases beyondthis point, the performance will gradually tend to that whenno relationships are used at all - this is the benchmark tableII.
V. CONCLUSION
Incorporation of relationships in the conceptualizationand classification framework reduced the number of false-positives and increased true positives (amongst the classifiedoutcomes). Although there was an increase in the numberof unclassified cases, the total number of incorrect outcomeswas also lower. This has a mitigating effect as inability toconceptualize is certainly better than incorrect conceptual-ization. Thus, in totality, this suggests an improvement over[25]. The number of unclassified cases could be reduced bychoosing only the most frequently occurring relationships.
For the dataset used in this work, the best performance wouldbe obtained with NOCC between 20 and 30. In the limitingcase (when there are no relationships included), the systemwould conceptualize and classify a similar number of casescorrectly as in [25].
A Bayesian approach to conceptualization and classifica-tion of space for mobile robots was presented. The suggestedalgorithm was based on the Naive Bayes Classifier (NBC)and was implemented using a clustering mechanism and asound Bayesian Programming methodology. Relationshipswere used in conjunction with the number of object occur-rences to infer concepts. The concepts inferred were usedto classify places. Results vindicated the use of inter-objectrelationships towards concept formation. A salient aspect ofthis algorithm is that it uses only information that is encodedin the representation of the space - objects and relative spatialinformation. It would thus allow for a consistent mapping ofsensory data to increasingly abstract concepts. The algorithmis meant to be run alongside the robot mapping strategypresented in [10] so as to result in a concept-orientedrepresentation of space. Also, the algorithm although taughtthrough exemplars, is not ontology specific. It relies on arobots inherent capability to recognize objects and buildsits own models for the spatial constructs it is taught. Thegenerated concepts increase the amount of semantic infor-mation contained in a robot’s spatial representation. Theyalso endow the robot with the capability of being morespatially aware machines, capable of reasoning about spatialsemantics. Future work will focus on improving the currentfindings by adding more spatial semantics, improving theclustering process and further testing of the learnt models.
ACKNOWLEDGMENTS
The authors thank Ahad Harati, Rudolph Triebel, XavierPerrin, Nikos Vlassis for their suggestions and all peoplewho allowed the use of their offices and kitchens for datacollection. This work has been supported by the EC underFP6-IST-002020-COGNIRON and FP6-IST-027140-BACS.
REFERENCES
[1] S. Thrun, Exploring Artificial Intelligence in the New Millenium.Morgan Kaufmann, 2002, ch. Robotic mapping: A survey.
[2] K. O. Arras, “Feature-Based Robot Navigation in Known and Un-known Environments,” Ph.D. dissertation, Swiss Federal Institute ofTechnology Lausanne (EPFL), 2003, Thesis number 2765.
[3] R. Chatila and J. P. Laumond, “Position referencing and consistentworld modeling for mobile robots,” in IEEE International Conferenceon Robotics and Automation, 1985.
[4] H. Choset and K. Nagatani, “Topological Simultaneous LocalizationAnd Mapping (SLAM): toward exact localization without explicitlocalization,” IEEE Transactions on Robotics and Automation, vol. 17,pp. 125–137, April 2001.
[5] A. Tapus, “Topological SLAM - Simultaneous Localization AndMapping with fingerprints of places,” Ph.D. dissertation, Swiss FederalInstitute of Technology Lausanne (EPFL), 2005, Thesis Number 3357.
[6] S. Thrun, “Learning Metric-Topological Maps for Indoor MobileRobot Navigation,” Artificial Intelligence, vol. 99 (Issue-1), pp. 21–71,1998.
[7] N. Tomatis, I. Nourbakhsh, and R. Siegwart, “Hybrid SimultaneousLocalization And Map building: A natural integration of topologicaland metric,” Robotics and Autonomous Systems, vol. 44, pp. 3–14,July 2003.

Fig. 4. Outcome of the clustering, conceptualization and place classification processes for a kitchen. The depiction is a top-down view. Each cluster ofobjects is identified by a color and a number in parenthesis. Rectangles depict cabinets containing objects within it in rows. The 3D map would have theobjects farther away from the center at higher levels than those near the center of the figure. Note that ‘n X object’ denotes n occurrences of an object.On the right are the outcomes as obtained using the two cases - the benchmark M3 (figure 2) and the proposed M4 (model C: NOCC = 20). Each clusteris classified as being one of 13 concepts used in this work. Cluster 7 which is correctly identified as a bottle group by model M4, is incorrect in theprevious case (M3). Cluster 2 is an example where some objects of a cooking space are clustered with objects of a storage space and hence those objectsare incorrectly conceptualized as being a part of the storage-space.
[8] I. Ulrich and I. Nourbakhsh, “Appearance-Based Place Recognitionfor Topological Localization,” in IEEE International Conference onRobotics and Automation (ICRA), San Francisco, CA, USA, April2000, pp. 1023–1029.
[9] S. Vasudevan, S. Gachter, and R. Siegwart, “Cognitive Spatial Rep-resentations for Mobile Robots - Perspectives from a user study,” inIEEE Int. Conf. on Robotics and Automation (ICRA) Workshop onSemantic Information in Robotics, Rome, Italy, April 2007.
[10] S. Vasudevan, S. Gachter, V. T. Nguyen, and R. Siegwart, “CognitiveMaps for Mobile Robots - An object based approach,” Robotics andAutonomous Systems, vol. 55, no. 5, pp. 359–371, 2007.
[11] D. G. Lowe, “Distinctive Image Features from Scale-Invariant Key-points,” International Journal of Computer Vision, vol. 60, no. 2, pp.91–110, 2004.
[12] B. W. Wah, “Generalization and Generalizability Measures,” IEEETransactions on Knowledge and Data Engineering, vol. 11, no. 1,pp. 175 – 186, January - February 1999.
[13] D. H. Fisher, “Knowledge Acquisition Via Incremental ConceptualClustering,” Machine Learning, vol. 2, pp. 139–172, 1987.
[14] B. Taskar, E. Segal, and D. Koller, “Probabilistic Classification andClustering in relational data,” in Seventeenth International Joint Con-ference on Artificial Intelligence (IJCAI), Seattle, Washington, USA,August 2001.
[15] J. B. Tenenbaum, “Bayesian Modeling of human concept learning,” inAdvances in Neural Information Processing Systems (NIPS) 11, S. S.M.S. Kearns and D. Cohn, Eds. Canbridge, MA, USA: MIT Press,1999.
[16] C. Galindo, A. Saffiotti, S. Coradeschi, P. Buschka, J.-A. Fernandez-Madrigal, and J. Gonzalez, “Multi-Hierarchical Semantic Maps forMobile Robotics,” in IEEE/RSJ Interrnational Conference on Intelli-gent Robots and Systems (IROS), Edmonton, Canada, 2005, pp. 3492–3497.
[17] O. M. Mozos, R. Triebel, P. Jensfelt, A. Rottmann, and W. Burgard,“Supervised semantic labeling of places using information extracted
from sensor data,” Robotics and Autonomous Systems, vol. 55, no. 5,pp. 391–402, 2007.
[18] O. M. Mozos, P. Jensfelt, H. Zender, G.-J. M. Kruijff, and W. Burgard.,“From Labels to Semantics: An Integrated System for ConceptualSpatial Representations of Indoor Environments for Mobile Robots.”in IEEE Int. Conf. on Robotics and Automation (ICRA) Workshop onSemantic Information in Robotics, 2007.
[19] A. Y. Ng and M. I. Jordan, “On Discriminative vs. Generativeclassifiers: A comparison of logistic regression and naive Bayes,” inAdvances in Neural Information Processing Systems (NIPS) 14. MITPress, 2002.
[20] J. Cheng and R. Greiner, “Learning Bayesian Belief Network Classi-fiers: Algorithms and System,” in Canadian Conference on ArtificialIntelligence (CSCSI), Ottawa, Canada, May 2001.
[21] A. K. Jain, M. N. Murty, and P. J. Flynn, “Data Clustering: A Review,”ACM Computing Surveys, vol. 31, no. 3, pp. 264–323, 1999.
[22] O. Lebeltel, P. Bessiere, J. Diard, and E. Mazer, “Bayesian RobotsProgramming,” Autonomous Robots, vol. 16, pp. 49–79, 2004.
[23] R. O. Duda, P. E. Hart, and D. G. Stork, Pattern Classification. WileyInterscience, 2000.
[24] S. Vasudevan and R. Siegwart, “A Bayesian Conceptualization ofSpace for Mobile Robots,” in IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), San Diego, USA, October2007, (more detailed Technical Report available on author webpage).
[25] S. Vasudevan, A. Harati, and R. Siegwart, “A Bayesian Conceptualiza-tion of Space for Mobile Robots : Using the Number of Occurrencesof Objects to Infer Concepts,” in 3rd European Conference on MobileRobotics (ECMR), 2007.
[26] C. M. Bishop, Pattern Recognition and Machine Learning. Springer,2006.
[27] N. Vlassis and J. J. Verbeek, “Gaussian mixture learning from noisydata,” Informatics Institute, University of Amsterdam, The Nether-lands, Tech. Rep. IAS-UVA-04-01, September 2004.
[28] G. Schwarz, “Estimating the dimension of a model,” Annals ofStatistics, vol. 6(2), pp. 461–464, 1978.