Embed Size (px)
Citation preview

Computers and Mathematics with Applications ( ) –
Contents lists available at ScienceDirect
Computers and Mathematics with Applications
journal homepage: www.elsevier.com/locate/camwa
A fast algorithm for 3D simulation of thermal stratification incontainment pools of nuclear power plantsT. Gornak a, O. Iliev a,c,d, P. Minev b,∗, A. Zemitis a
a Department of Flows and Materials Simulation Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1, Kaiserslautern,Germanyb Department of Mathematical and Statistical Sciences, University of Alberta, Edmonton, Alberta, Canada T6G 2G1c King Abdullah University of Science and Technology, KAUST, Saudi Arabiad Technical University of Kaiserslautern, Kaiserslautern, Germany
a r t i c l e i n f o
Article history:Available online xxxx
Keywords:Nuclear reactor safety simulationsBoussinesq equationsSplitting methods
a b s t r a c t
Safety analysis is of ultimate importance for the operation of Nuclear Power Plants (NPP).Experiments even on a pilot scale are quite expensive and therefore numerical simulationsplay a major role in this analysis. They allow to predict the behaviour of NPP systemsunder different operational and accident conditions and to develop proper action plans forminimizing the risks of accidents, and minimizing the consequences of possible accidents.For a proper risk assessment and development of emergency plans, a very large number ofscenarios have to be simulated, achieving acceptable accuracy for the critical parameters,such as radioactive pollution and temperature. The existing software tools are either verysimplistic and therefore quite inaccurate or they use general CFD codes that makes themvery slow. This paper presents a customized algorithm and corresponding software toolsfor simulation of non-isothermal flows in the containment pool of aNPP. It first summarizesthe requirements for such simulation tools and then presents the new algorithm which,in the opinion of the authors, is a proper compromise between accuracy and efficiencyfor solving such problems. It uses a Fictitious Domain Method (FDM) to impose theboundary conditions, a Cartesian finite volume discretization combined with a DomainDecomposition (DD) technique, and a factorized perturbation of the incompressibilityconstraint proposed recently in Guermond and Minev (2010). Finally, results fromnumerical simulations in idealized and realistic geometries are presented and discussed.
© 2014 Elsevier Ltd. All rights reserved.
1. Introduction
Safety analysis is of ultimate importance for the proper operation of Nuclear Power Plants (NPP). In most cases it isimpossible or undesirable to perform experiments simulating accidents in NPP. Therefore, numerical simulations are theonly feasible tool that can be used to test a large number of possible accident scenarios and devise a proper containmentstrategy for each one of them. In the present paper we consider the so-called ‘‘lost of coolant accident’’ that may occurin the containment building. A containment building typically is a several-story building of a complicated shape, and it isdesigned as a passive safety system for some types of nuclear reactors, e.g. pressurized water reactors (PWR) and boilingwater reactors (BWR). Its main purpose is the prevention of leakage of radioactive water in case of accidents. Presently, the
∗ Corresponding author. Tel.: +1 780 492 3398.E-mail addresses: [email protected] (T. Gornak), [email protected] (O. Iliev), [email protected] (P. Minev), [email protected] (A. Zemitis).
http://dx.doi.org/10.1016/j.camwa.2014.03.0110898-1221/© 2014 Elsevier Ltd. All rights reserved.

2 T. Gornak et al. / Computers and Mathematics with Applications ( ) –
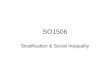
Fig. 1. One part of computational domain and cross section of the real domain.
most widely used tools for computation of the pressure head and average temperature are based on the so-called LumpedParameter (LP) codes (also called ‘‘codes for space averaged quantities’’), such as COCOSYS [1]. Their main advantage is thatthey are very fast while they still include a well-validated description of the chemical and physical processes occurring inthe containment building. On the other hand, the LP models are too simplistic to resolve the spatial stratification of the flowthat might be critical in the lower part of the containment building, the so-called containment pool, where the radioactivewater is collected. Recently, some 3D CFD codes have been employed for that purpose and they naturally allow for verydetailed and accurate simulations. However, in a large part of the containment building, particularly at the higher floorsoccupied by air, the LP models are accurate enough and there is no need for very detailed simulations. Furthermore, full 3Dsimulations require much pre-processing time and large computational resources. As a result, it would be impossible (orbetter to say extremely expensive) to run a large number of accident scenarios in a 3D setting. The present study is aimed atthe development of an algorithm and software that compromises between these accuracy and efficiency requirements andis specifically designed to perform simulations of stratified flows in the containment pool on relatively simple computersystems. Before we proceed with the description of the algorithm, we briefly discuss the most essential features of the heatand fluid flow in the containment pool and the requirements to the numerical simulation tools.
• The geometry of the containment pool is usually quite complicated, (see Fig. 1 for a typical example). Nevertheless,the flow domain can be well approximated using binary compositions of objects of a simple shape. This allows for thedevelopment of a fast and easy to use pre-processor described in [2] (see also Section 2 of the present paper).
• The flow in the containment pool is a free surface flow. However, the free surface effects are important only at the initialstage of its flooding. At later stages, since the depth of the water in the pool becomes significant, it is reasonable to assumethat the free surface is flat and the pressure on it is constant. Such an assumption, however, prevents us from a completedescription of the flooding process since it does not provide a mechanism for flooding the neighbouring rooms after a givenroom is full of water. The present approach involves a carefully managed system of localized sources and sinks that allowfor the simulation of such scenarios.
•During an accident, the temperature of thewater entering the containment pool is significantly different than thewaterin the pool and this leads to thermal mixing and stratification. As a result, the average temperature in the pool can differsignificantly from the temperature at the air–water interface. The LP approach ignores this difference and uses the averagetemperature in the pool to compute the rate of various reactions occurring in the air or at the air–water interface that canresult in very inaccurate predictions. This is one the main reasons for the development of the present customized algorithmand the software tool CoPool, [3].
• The containment building is surrounded by a very thick concrete wall. The relatively low thermal conductivity ofthe concrete and the large difference between the inside and outside temperature result in the development of a thermalboundary layer inside the containment wall. Its effect cannot be properly resolved by the LP approach and therefore in thepresent customized approachwe employed a specialized overlapping Domain Decomposition (DD) technique to resolve thethermal problem inside the containment wall. It is briefly discussed in Section 5.
• In general, the accuracy requirement to the local values of the water velocity and pressure are not high, as long as thethermal stratification is properly accounted for, and the pressure drop is accurately evaluated. The accuracy of the pressuredrop computation is crucial for the proper design and operation of the pumps positioned at the bottom of the containmentpool.
Based on these observations and requirements, we developed a customized algorithm and a computer code that areaimed at achieving a reasonable compromise between accuracy and efficiency in the simulations of a large number ofemergency scenarios for the containment pool of NPPs. It employs a finite volume discretization on Cartesian grids forthe heat and fluid flow and a fictitious domain approach for imposition of its boundary internal boundary conditions. Thepressure is computed also by a fictitious domain approach using a factorized perturbation of the incompressibility constraint

T. Gornak et al. / Computers and Mathematics with Applications ( ) – 3
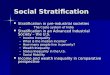
Fig. 2. An example of a domain of a complex shape and the corresponding grid, constructed from several primitives of a relatively simple shape (spheresand a parallelepiped).
proposed recently in [1]. This approach requires the solution of only one vectorial and one scalar parabolic problems for thefluid velocity and temperature and a set of three one dimensional elliptic problems for the pressure. These subproblemscan be solved very efficiently as demonstrated below. The heat flow problem in the containment walls is solved by meansof an overlapping DD approach using a local Cartesian coordinate system for each block again employing a finite volumediscretization. The walls are composed from a finite set of primary components, each one of a relatively simple shape, thatcan be transformed into a cube by means of a smooth transformation (see Fig. 2).
In comparison to the lumped mass models, the present approach provides much more accurate results for the thermalstratification in the containment pool, being much faster than the existing general purpose commercial CFD tools. Sincethe boundary conditions are imposed by FDM the spatial accuracy of this approach is formally O(h), however, the resultingalgorithm is very fast and the accuracy of the flow computation around the boundary is not of a crucial importance forthe safety analysis. In addition, the slowest component of the flow solver which usually is the Neumann Poisson solver forthe pressure, that is usually required by the very popular projection methods, is substituted in the present algorithm by afactorized perturbation as in [1], which allows to resolve the pressure problem using a direct tridiagonal solver. Since theelliptic pressure problem takes often up to 80% of the computational time this direction splitting approach greatly reducesthe overall computational effort.
The remainder of the paper is organized as follows. Section 2 presents information about the main features of the pre-processor. In Section 3 the governing equations together with the fictitious domain approach are presented. In Section 4we discuss the discretization of the problem in the fluid domain and the use of sinks/sources for simulation of flooding ofthe containment building. Section 5 presents a non-overlapping DD method for decomposing of the heat flow problem inthe flow domain from the heat conduction problem in the outer walls, as well as an overlapping DD method for solving theheat conduction problem in the walls of the containment building. Section 6 presents results from numerical experiments.Finally, some conclusions are drawn.
2. Pre-processor description
Since the computational tool CoPool [3] described in this paper is to be used by engineers with a very limited experiencein CFD, its pre-processor is maximally simplified and user friendly.
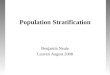
The computational grid for the heat and fluid flow problem is generated in two steps. At the first step the user describesthe geometry of the domain by means of Boolean operations (conjunction, disjunction, and negation) on a set of primitiveobjects of a simple shape. Currently the primitive set includes a generic parallelepiped, sphere, and cylinder. The size andposition of each such object can be suitably specified. The concept is illustrated in Fig. 3 that demonstrates how to constructa shell of a hemisphere by means of two spheres and one parallelepiped. This is done by first constructing the conjunctionof a larger sphere and the negation of a smaller one, and then constructing the conjunction of the so produced solid andthe negation of a parallelepiped. The resulting shell is displayed in the right panel of the figure but for a better visibility aquarter of the actual shell is not shown.
At the second step, an eventually non-uniform Cartesian finite volume grid that covers the entire domain is generated.Since all internal walls and fixed obstacles are handled by FDM the grid covers them and the boundary conditions areimposed by a penalty term in themomentumand energy equations (more details are provided in the next section). However,at the interface between the outer wall of the containment building and the flow domain, this Cartesian grid is suitablytruncated so that all grid cells whose centroids are not inside the fluid domain are ignored. All grid cells whose centroids areinside the fluid domain form the computational grid for the heat and fluid flow problem. This process is illustrated in the leftpanel of Fig. 4. It is clear that the actual domain boundary (depicted by the dashed line) is approximated by quite a roughstaircase approximation. This limits the formal spatial accuracy of the finite volume discretization to first order but it is not

4 T. Gornak et al. / Computers and Mathematics with Applications ( ) –
Fig. 3. Generation of the hemisphere from primitives and Boolean operations.
(a) Approximation of the boundary ofthe fluid domain.
(b) Schematic representation of the interfacebetween the fluid and the wall mesh.
Fig. 4. Sketch of the interface between the flow problem and the heat transfer problem in the wall of the containment pool.
an additional restriction since the fictitious domain procedure has formally the same accuracy. On the other hand, the FDMallows for a great simplification of the grid generation and the overall solution procedure, as well as the use of Cartesiangrids that in turn greatly simplifies the solution of the final linear systems of algebraic equations. In addition, as mentionedin the introduction, the accuracy of the local values of the fluid velocity and pressure are not of a primary importance forthe safety analysis.
The containment wall geometry is created in a similar fashion using the same primitives. In each of them, however, anorthogonal grid is created after a proper transformation of the corresponding primitive into a parallelepiped. The resultinggrid is curvilinear and eventually non-uniform, so that to allow for a proper resolution of the wall thermal boundary layerthat is usually present in such problems. The heat flow problem is resolved by means of an overlapping DD and so, thedifferent curvilinear grids do not need to be matched at the interface of two primitives. The heat flow problem in the fluiddomain is connected to the heat conduction problem in the wall by means of a non-overlapping domain decompositionprocedure (see Section 5.1 below). So the two grids must be ‘‘glued’’ together as illustrated in the right panel of Fig. 4, andtherefore some connectivity data at the interface between the two grids is prepared by the pre-processor.
As mentioned in the introduction, the flooding of the rooms of the containment building is simulated via a set of sinksand sources that must be switched on or off depending on the connectivity and water level in neighbouring rooms. Thismechanism requires a proper room classification and description of the rooms connectivity which is also performed by thepre-processor.
3. Governing equations
Let us denote byΩ the flow domain and byΩw the domain occupied by the walls of the containment building. Note, thatin general the flow domain is time dependent i.e.Ω = Ω(t). The heat and fluid flow in the containment pool is describedby the incompressible Navier–Stokes equations in the so-called Oberbeck–Boussinesq approximation:
∂u∂t
+ (u · ∇)u − Pr∆u + ∇p = RaPrTe + Qu,
∇ · u = Q inΩ × [0, T ],
(1)
∂T∂t
+ (u · ∇)T − ∇ ·
1Pe
∇T
= QT , inΩ × [0, T ]. (2)
The heat conduction in the solid walls is described by:
∂T∂t
−1Pes
∇2T = 0, inΩw × [0, T ]. (3)

T. Gornak et al. / Computers and Mathematics with Applications ( ) – 5
(a) Reactor building and a piece of the actual fluid domain. (b) Fluid domainΩ (on top) and itsFDM extension Ω(at the bottom).
Fig. 5. Illustration of the extension of the complex-shaped geometry of the reactor building to a domain of a simple shape.
The above system of equations is complemented with proper boundary and initial conditions:
u|∂Ω = 0, for t ∈ [0, T ], and u|t=0 = u0, inΩT |∂Ω = Tb, for t ∈ [0, T ], and T |t=0 = T0, inΩT |∂Ωw = Tbw, for t ∈ [0, T ], and T |t=0 = T0w, inΩw.
(4)
Here Ra = gβ∆TL3/(λν), Pr = ν/λ, and Pe = UL/λ, Pes = UL/λs are the dimensionless Rayleigh, Prandtl, and fluid and solidPeclet numbers, g and e are the gravity acceleration and its direction, β is the fluid thermal expansion coefficient, ν is thefluid viscosity, λ is the fluid thermal diffusivity, λs is the thermal diffusivity of the solidwalls,∆T , and L are the characteristictemperature difference, and characteristic length scale correspondingly.Qu, Q , and QT are sources of momentum, mass, andenergy that are properly chosen so that to mimic the flooding process in the containment building, and at the same time topreserve the momentum, mass, and energy balances described by the equations. On the interface between Ω and Ωw weassume the standard interface conditions for continuity of the temperature and continuity of the normal component of theheat flux.
The containment building has many internal walls and other solid objects of various shape which makes the actual do-main of the fluid flow extremely complicated (see the left panel of Fig. 5). For the sake of efficiency, theOberbeck–Boussinesqequations (1)–(2) are discretized on a Cartesian grid that covers all internal objects and imposes no-slip boundary condi-tions on their walls by means of a fictitious domain formulation. Let Ω ⊂ Rd (d = 2, 3) be the extended domain thatcovers the fluid domain Ω , Ω = Ω ∪ Ωf , where Ωf is a fictitious domain in which the fluid velocity must be set to zero.This extension is illustrated in the right panel of Fig. 5 where Ω is the piece of a spherical shell of a darker colour, and thelighter-coloured region is the fictitious domainΩf . In order to impose the boundary condition on ∂Ω the FDM employs thefollowing penalized momentum equations in Ω:
∂u∂t
+ (u · ∇)u − Pr∆u + cϵu + ∇p = RPrTge + Qu, ∇ · u = Q in Ω × [0, T ], (5)
where
cϵ =
ϵ−2, inΩf0, inΩ. (6)
Due to the presence of the penalty term 1ϵ2u, the velocity in the fictitious domainΩf is forced to be very small, of the order
of the small parameter ϵ. If required, internal Dirichlet boundary conditions on the temperature can be imposed including asimilar penalty term in the energy equation (2). Alternatively, zero Neumann boundary conditions on the temperature canalso be imposed by introducing a non-constant Peclet number via redefining the thermal diffusivity is follows:
λ(t, x) =
λf x ∈ Ωfλ x ∈ Ω
(7)
where λf takes a very large value, say λf = ϵ−2.For more details on the FDM the reader is referred to [4,5].

6 T. Gornak et al. / Computers and Mathematics with Applications ( ) –
Note that the heat equation inside thewalls of the containment building is further discretized bymeans of an overlappingDDmethodwhere the subdomains have the shape of one of the primitives. Therefore, if the primitive is a sphere or a cylinder(3) is transformed by a spherical or polar transform correspondingly. This allows to grid the transformed domain usingorthogonal grids and greatly improves the efficiency of the solver.
4. Discretization of the Oberbeck–Boussinesq equations
4.1. Time discretization
For the sake of efficiency, Eqs. (1), (2) are usually discretized in time using some kind of a splitting technique thatallows to split the various operators involved in them.We employ a formally first order time discretization since the spatialdiscretization is reduced to first order as well. Given the values of the velocity un, pressure pn, and the pressure incrementφn, at time tn, and if τ is the time step, the transition to the next time level, tn+1, proceeds as follows:Temperature update:
T n+1− T n
τ+ (un
· ∇)T n− ∇ ·
1Pe
∇T n+1
= QT . (8)
Pressure predictor:
p∗,n+1= pn + φn. (9)
Velocity update:
un+1− un
τ+ (un
· ∇)un− Pr∆un+1
+ ϵ−2un+1+ ∇p∗,n+1
= Qu + RPrT n+1e. (10)
Pressure corrector:
Aφn+1=
Q − ∇ · un+1
τ. (11)
Pressure update:
pn+1= pn + φn+1
− Prχ∇ · un+1, for χ ∈ [0, 1]. (12)
Probably the most popular choice for the operator A at the pressure correction step is given by the so-called projectionmethods where A = ∆. These methods were introduced by Chorin [6] and Temam [7] in their non-incremental form andfurther developed into the incremental form presented above (see [8] for details on projection methods). This choice forthe operator A requires the solution of an elliptic scalar Neumann problem at each time step whose condition numberscales like O(h−2), h being the smallest grid size. It is much worse conditioned than the parabolic problems that need to besolved at the other steps of the splitting algorithm presented above whose conditioning scales like O(τh−2). Therefore, theelliptic solve for the pressure can take up to 80% of the entire CPU time for this algorithm even if proper preconditioning isemployed. Recently, in [9] it was shown that if A satisfies the conditions: (i) A and its domain D(A) are such that the bilinearform a(p, q) =
ΩqApdx is symmetric; (ii) ∥∇q∥2
L2 ≤ a(q, q),∀q ∈ D(A), then the stability and accuracy properties of thealgorithm do not differ significantly from the properties of the incremental projection methods. In the same article it wasshown that if the computational domain is of a simple shape (a parallelepiped or a union of such solids), then the followingfactorized operator A is a very optimal choice:
A := (I − ∂xx)(I − ∂yy)(I − ∂zz),
with I being the identity operator. For this choice of A the pressure correction step (11) in the algorithm above becomes:
(I − ∂xx)(I − ∂yy)(I − ∂zz)φn+1
=Q − ∇ · un+1
τ. (13)
The solution to (13) cant be computed as the following sequence of one dimensional problems
ψ − ∂xxψ =Q − ∇ · un+1
τ,
η − ∂yyη = ψ,
φ − ∂zzφ = η.
The solution of these problems can be performed very efficiently by means of the Thomas algorithm and therefore this isthe choice for A made in the present work.

T. Gornak et al. / Computers and Mathematics with Applications ( ) – 7
Fig. 6. A sketch of a 3D finite volume and the associated degrees of freedom for the velocity vector u = (u, v, w).
4.2. Spatial discretization
Eqs. (8)–(12) are solved over the extended domain of a simple shape Ω and discretized in space on a Cartesian grid usingthe standard finite volume approximation. The scalar variables, temperature and pressure, are located at the cell centres,while the velocity components are located at cell faces, as shown in Fig. 6. For more details the reader is referred to standardtexts on the subject (e.g., [10]).
The use of the fictitious domain approach limits the formal accuracy of the finite volume discretization to O(h) (see [11]for details). Briefly speaking, the reason for this loss of accuracy is that although the fictitious domain formulation imposeswell zero velocity inside the fictitious domain, its finite volume discretization cannot account for the discontinuity of thevelocity gradient across the boundary betweenΩ andΩf since it uses the standard central difference stencil with constantviscosity for discretization of the second derivatives of the velocity there. Unless the grid is conformal to the boundary(i.e. there is at least one point of the discretization stencil that is on the boundary) the formal accuracy of the centraldifference stencil is limited to first order.
4.3. Approximation to the flooding process
Asmentioned in the introduction, it is quite difficult to simulate the flooding of the containment building since it is a freeboundary problem and the free boundary can have a very complicated shape. Here we admit the engineering approach andassume that the free boundary is always flat and horizontal, and simulate the flooding process by introducing source termsin Eqs. (1)–(2). In each room of the containment building these sources/sinks of mass, momentum, and energy are designedso that once the room is filled with water to the top of its shortest wall any excess of water is transferred to its neighbouracross the shortest wall. These source terms are nonzero only in a layer of elements near the free boundary. In addition, thebuilding itself has some pumps to pump out the flood water that are also modelled in a similar fashion. Of course, all thesesource and sink terms are chosen so that the total mass, momentum and energy balance is approximately obeyed.
5. Domain decomposition approach
The discretization of the heat and fluid flow equations described in the previous section, although being first orderaccurate in both space and time, yields much more accurate results for the temperature and pressure distribution insidethe fluid domain than the standardly used LP models. However, the accuracy of the fluid flow computations are cruciallyinfluenced by the accuracy of the computation of the heat transfer across the outer walls of the containment building. Dueto the large difference of the inner and outer temperature as well as the thermal properties of the walls in many casesof interest, a thermal boundary layer is formed and it must be properly resolved to guarantee any accuracy of the overallsimulation. Therefore, the heat transfer in the outer walls is computed bymeans of an overlapping DD procedure. The choiceof shapes of the subdomains is again limited to the three possible primitives: parallelepiped, sphere, and cylinder. Each ofthem is gridded by an orthogonal grid. In case of spherical and cylindrical subdomains the grid is created after a sphericalor cylindrical transform of the subdomain. This overlapping DD discretization is coupled by means of a non-overlapping DDprocedure to the heat flow problem inside the fluid domain.
5.1. Non-overlappingDD for coupling of the heat transfer problems in the fluid domain and in thewalls of the containment building
The non-overlapping DD method was proposed by Lions [12,13], in the so-called Dirichlet–Neumann form. At thecommon interface of two subdomains, it imposes a Dirichlet boundary condition on the problem in one of them

8 T. Gornak et al. / Computers and Mathematics with Applications ( ) –
and a Neumann boundary condition on the problem in the other one. Other combinations, such as Robin–Robin andDirichlet–Robin are also known to produce stable decompositions. Here we adopt the Dirichlet–Robin decomposition sothat the heat transfer problem within the fluid domain is supplied with a Dirichlet boundary condition while the problemin the walls is subjected to a physically relevant Robin boundary condition, the so-called convective heat transfer condition.The Dirichlet boundary condition for the problem in the flow domain is computed using a weighted average approximation.In the example of an interface given in Fig. 4a, the temperature at the midpoint of one of the wall segments (marked by+ sign) at the previous iteration level is used as a Dirichlet boundary condition for the problem in the fluid domain. Thefluid temperature at this point is interpolated from its values at the three centroids of the fluid grid cells marked by a+ signtoo, using weights equal to the inverse distance between the point of interpolation and the corresponding centroid. Ofcourse, this procedure requires that the number of wall grid interfaces is equal to the fluid grid boundary nodes so that itprovides a sufficient number of equations for all boundary degrees of freedom in the fluid.
The convective heat transfer condition for the heat conduction problem in the walls is given by φq = αA(Twall − Tfluid),where φq is the normal heat flux, proportional to the normal derivative of the temperature of the heat conduction probleminside the wall, Twall. Tfluid is an interpolation of the fluid temperature at the wall surface element computed with the sameweighted average as described above, α is the heat transfer coefficient, and A is the area of the surface element. The normalto the wall interface is computed using a staircase approximation to its boundary so that if the surface element has a slopesmaller than π/4, or between 3π/4 and π , its normal is considered to be vertical, and if it is between π/4 and 3π/4 thenormal is considered to be horizontal. This is consistent with the formally O(h) spatial accuracy of the overall scheme.
5.2. Overlapping DD for the heat transfer in the walls
The overlapping domain decomposition (DD) procedure used here is based on the Alternating Schwarz Method (ASM).The heat conduction problem in each primitive object (cylinder, parallelepiped or sphere), after a suitable transformation,is solved with Dirichlet boundary conditions that are devised by interpolating the temperature at the previous iterationlevel in the neighbouring blocks that overlap partially with the current block. Two possible interpolations are available inthe current simulator: simple three-linear interpolation, or the interpolation procedure used in mesh-free methods, calledDiffuse Element Kansa Method (DEKM) [14]. The local subproblems are discretized in space by means of a finite volumeprocedure and in time by a first order Euler implicit approximation.
5.3. Parallelization
A significant advantage of the algorithm described in this section is that it is suitable for implementation on parallelclusters, and therefore it was implemented in parallel using boost implementation of threads. Since the equations for eachcomponent of the velocity can be computed independently they are computed in parallel on a separate thread. In addition,the pressure equation (13) comprises a set of one dimensional problems that can also be split among different processors.They are implemented using a thread pool pattern for distribution of tasks between threads. The number of threads in thiscase depends on the underlying hardware configuration. All simulations were performed on a computer with a dual coreIntel Xeon 5148LV and 8 GB of RAM.
6. Numerical simulations
The purpose of the simulations described below is mostly to demonstrate the efficiency of the flow solver based onthe factorized perturbation of the incompressibility constraint as compared to the classical projection methods. Here weconsider the following three test cases: (i) differentially heated cavity, simulated with and without FDM; (ii) room withinternal walls in the presence of a sink and a source; (iii) heat and mass transfer in ThAI experimental facility [15]; ThAI isan experimental facility built especially for performing experiments for the needs of nuclear reactor safety.
All simulations were performed using two sets of equations that we will refer to as FDM–DS (FDM with DirectionSplitting) and SD–SPS (Standard Domain with Standard Poisson Solver). In case of FDM–DS equations (8)–(10), (13), (12)are solved on a domain that is extended to a parallelepiped Ω; in case of SD–SPS, Eqs. (8)–(12) with a standard Poissonequation at the pressure correction step (11) are solved on the original flow domainΩ .
6.1. Differentially heated 3D cavity
The differentially heated cavity is a classical benchmark problem for validation of coupled flow and heat transferdiscretizations. No-slip velocity boundary conditions on all walls of the cavity and different Dirichlet boundary conditionsfor the temperature are enforced on the left (hot) and right (cold) vertical walls. The horizontal walls as well as the frontand back walls are assumed to be thermally insulated.
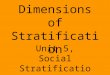
In themiddle and right panels of Fig. 7we present the steady flow patterns and temperature isolines at Rayleigh numbersRa = 103, 104 and 105, in a vertical slice through the centroid of the cavity, parallel to the frontwall. In the left panelwe show

T. Gornak et al. / Computers and Mathematics with Applications ( ) – 9
Fig. 7. Convection patterns at various Rayleigh numbers. Left panels: flow profiles along the line connecting the centroids of the left and right walls of thecavity computed with FDM–DS (symbols) and SD–SPS (solid lines). Middle panels: velocity field in a plane through the cavity centroid, parallel to the frontwall. Right panel: temperature isolines in the same plane.
the vertical velocity profiles along a horizontal segment that connects the centroids of the left and right vertical walls. Thesymbols represent the velocity calculated with the FDM–DS method, and the solid lines represent the velocity calculatedwith the SD–SPS method. Both sets of results clearly agree very well. Note that the SD–SPS code is based on a standardprojection method that is proven to be fully first order accurate in time (see [8]) for the Euler Implicit discretization usedhere. Since the two methods yield virtually identical results, this gives us confidence that the present method is as accurateas the standard first order projection method.
At low Rayleigh numbers only a single eddy is present. However, as the Rayleigh number increases, two counter rotatingeddies are formed. At Ra = 103 the isotherms tend to be parallel to the vertical walls, however, at higher Rayleigh numbersthe isotherms become close to parallel to the adiabatic walls. These results are in a good qualitative agreement with theexpected physical behaviour.
6.2. Flow in a room with internal walls
In the course of an accident, breakages in different parts of a containment may occur. These breakages may act as sinksand sources. In the present example we demonstrate the influence of mass sinks and sources on the flow. The simulationdomain is a cubic room with two internal walls filled with water (see Fig. 8a). A source is placed at the top of the room

10 T. Gornak et al. / Computers and Mathematics with Applications ( ) –
(a) Simulation domain. (b) Sink position. (c) Source position.
Fig. 8. Description of the setting for flow in a room with an internal wall.
0.8
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.01.0 2.0 3.0 4.0
Z-A
xis
X-Axis
2.0
1.0
0.0
Y-A
xis
X-Axis
0.0 1.0 2.0 3.0 4.0
(a) Velocity in a vertical slice. (b) Velocity in a horizontal slice.
Fig. 9. Velocity field in various planes.
(see Fig. 8b) and a sink at its bottom (see Fig. 8c). To insure incompressibility, the volume of water generated by the sourceequals the volume of water pumped through the sink. The flow patterns in a vertical and horizontal slice of the domain arepresented in Fig. 9a and b. The flow features are clearly in agreement with the physical expectations.
6.3. ThAI facility
The ThAI facility is a technical scale experimental facility for research in the area of nuclear reactor containment safety.The ThAI test vessel dimensions are: height of 9.2m, diameter of 3.2m, free volumeof 60m3. As discussed by [15], dependingon experimental needs, an inner cylinder can also be added (see Fig. 10b).
6.3.1. Test case 1In the first simulation the container is filled with water at temperature 20 °C while water at temperature of 25 °C is
pumped in through the inlet. In order to insure incompressibility, the same amount of water is pumped out through theoutlet. Thus, both at the inlet and outlet, the velocity is subject to a constant Dirichlet boundary condition. No-slip boundarycondition for the velocity and zero Neumann boundary condition for the temperature are imposed on the other walls (seeFig. 10b).
In Fig. 11a we show simulation results for the velocity field and temperature contours in a slice of the computationaldomain. The temperature contours suggest that mixed convection occurs in this case, with hot water flowing down in partof the domain and up in another part.
In Table 1 we present the CPU time used for the FDM–DS and SD–SPS simulations. The grid for the FDM–DS simulationsincludes the nodes in the fictitious part of the domain and therefore its number of nodes is higher. However, the grids withcomparable number of nodes in both cases have a comparable resolution. Clearly, the simulations with the FDM–DSmethodare significantly faster than the simulationwith the SD–SPSmethod. This acceleration is due entirely on use of the factorizedperturbation of incompressibility in (13) used in the FDM–DS simulations as opposed to solving the elliptic problem for thepressure given by (11) with A = ∆ in the SD–SPS simulations.

T. Gornak et al. / Computers and Mathematics with Applications ( ) – 11
(a) 3D model of ThAI. (b) A slice of the 3D geometry;shaded areas belong toΩf . Theshaded cylinder in the centralpart is used only in thesimulations from Section 6.3.2.
Fig. 10. ThAI facility.
(a) Simulationresults for setupfrom Section 6.3.1.Velocity vectorsand temperaturecontours in a slice.
(b) Simulation results for setup fromSection 6.3.2. Velocity vectors andtemperature contours in a slice for twodifferent moments in time.
Fig. 11. Simulation results for ThAI facility.

12 T. Gornak et al. / Computers and Mathematics with Applications ( ) –
Table 1CPU time for the computations in Section 6.3.1 on two different grids.
FDM–DS SD–SPS
Number nodes 78300 671800 55700 453300CPU time 0.6 5.1 1.65 24.3
6.3.2. Test case 2In this test casewe consider the ThAI geometry including the inner cylinder (see Fig. 10b). The boundary conditions on the
outer boundary of the domain are the same as in the previous simulationwhile no slip velocity and zero Neumann conditionfor the temperature are used on the boundary of the internal cylinder. For the simulationwith the direction splitting operator(FDM–DS method) the inner cylinder belongs to the fictitious part of the domain,Ωf .
In Fig. 11b we show velocity vectors and temperature contours in a slice of the domain. As in the previous case, theFDM–DS method was again significantly faster than SD–SPS method.
7. Conclusion
In this paper a fast and reasonably accurate algorithm for simulation of thermal stratification in the containment poolof a NPP is described. An essential component of the algorithm is a fast direction splitting method for the unsteadynon-isothermal incompressible Navier–Stokes equations. The main advantage of the directional splitting algorithm isa significant computational time reduction in comparison to the standard projection methods for imposition of theincompressibility constraint in Navier–Stokes equations. At the same time, the numerical accuracy of both algorithms doesnot differ significantly. Furthermore, suitable pre-processor for creating containment pool geometries and for generatingoverlapping orthogonal grids is described and various customized domain decomposition approaches are discussed. Finally,results from several computational test cases demonstrate the efficiency and the potential of the method. The algorithm isalso being validated on several sets of experimental data and the results will be reported in a forthcoming paper.
References
[1] J. Guermond, P. Minev, A new class of fractional step techniques for the incompressible Navier–Stokes equations using direction splitting, C. R. Acad.Sci. Paris, I 348 (2010) 581–585.
[2] A. Zemitis, O. Iliev, T. Gornak, B. Schmidtmann, Copool: Preprocessor’s manual,http://www.itwm.fraunhofer.de/fileadmin/ITWM-Media/Abteilungen/SMS/Pdf/CoPrepUserManual.pdf, 2012 (accessed online 21.08.13).
[3] A. Zemitis, O. Iliev, K. Steiner, T. Gornak, S. Jena, Mathematical models, solution methods, and validation and verification tests for non-isothermal 3D containment pool flow problems, http://www.itwm.fraunhofer.de/fileadmin/ITWM-Media/Abteilungen/SMS/Pdf/CoPool_ModAlg.pdf,2012 (accessed online 21.08.13).
[4] A. Vabishchevich, Equation of Physics, Nauka, Moskva, 1999 (in Russian).[5] P. Angot, Analysis of singular perturbations on the Brinkman problem for fictitious domain models of viscous flows, Math. Methods Appl. Sci. 22 (16)
(1999) 1395–1412. http://dx.doi.org/10.1002/(SICI)1099-1476(19991110)22:16¡1395::AID-MMA84¿3.0.CO;2-3.[6] A. Chorin, Numerical solution of the Navier–Stokes equations, Math. Comp. 22 (1968) 745–762.[7] R. Temam, Sur l’approximation de la solution des équations de Navier–Stokes par la méthode des pas fractionnaires ii, Arch. Ration. Mech. Anal. 33
(1969) 377–385.[8] J.-L. Guermond, P. Minev, J. Shen, An overview of projection methods for incompressible flows, Comput. Methods Appl. Mech. Engrg. 195 (2006)
6011–6054.[9] J.-L. Guermond, P. Minev, A new class of splittingmethods for the incompressible Navier–Stokes equations using direction splitting, Comput. Methods
Appl. Mech. Engrg. 200 (2011) 2083–2093.[10] T. Russell, R. Trujillo, The Finite Volume Element Method for Elliptic and Parabolic Equations, UCD/CCM Report, University of Colorado at Denver,
Center for Computational Mathematics, 1996. http://books.google.de/books?id=62EIHQAACAAJ.[11] P. Angot, J. Keating, P. Minev, A direction splitting algorithm for incompressible flow in complex geometries, Comp. Meth. Appl. Mech. Engng.[12] F. Hecht, J.-L. Lions, O. Pironneau, Domain decomposition algorithm for computer aided design, in: A. Sequeira, H.B. Veiga, J.H. Videman (Eds.), Applied
Nonlinear Analysis, Kluwer Academic Publishers, Boston, 1999, pp. 185–198.[13] A. Toselli, O.Widlund, DomainDecompositionMethods—Algorithms and Theory, in: Springer Series in ComputationalMathematics, vol. 34, Springer-
Verlag, Berlin/Heidelberg, 2005, http://dx.doi.org/10.1007/b137868.[14] E. Kansa, Multiquadrics—a scattered data approximation scheme with applications to computational fluid-dynamics—ii solutions to parabolic,
hyperbolic and elliptic partial differential equations, Comput. Math. Appl. 19 (8–9) (1990) 147–161. http://dx.doi.org/10.1016/0898-1221(90)90271-K.
[15] B. Technologies, ThAI-Facility and Program, http://www.becker-technologies.com/pdf/thai.pdf (accessed online 11.01.13).