Embed Size (px)
Citation preview

Petr Krysl
A Pragmatic Introduction toFinite Element Analysisfor Structural Engineers
With the Matlab toolbox SOFEA
November 2005
Pressure Cooker PressSan Diego

Contents
Part I Introducing the Galerkin method
1 Model of a Taut Wire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1 Deriving the PDE model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Balance equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Boundary conditions (in space) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5 Initial conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.6 Anything else? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 The method of Mr. Galerkin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1 Residual of the balance equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Integral test of the residual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Test function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4 Trial function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5 Manipulation of the residuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.6 Stiffness and mass matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.7 Piecewise linear basis functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.8 Numerical quadrature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.9 Putting it together: system of ODE’s . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Introducing the Matlab code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1 Statics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Statics: uniform load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3 Free vibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.4 Virtual work principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Part II Thermal analysis
4 Model of Heat Diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.1 Balance equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.2 Constitutive equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.3 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.4 Initial condition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.5 Summary of the PDE model of heat conduction . . . . . . . . . . . . . . . . . 29
VI Contents
5 Galerkin method for the model of heat conduction . . . . . . . . . . . . 315.1 Weighted residual formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Reducing the model dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.3 Test and trial functions: basis functions on triangulations . . . . . . . . . 345.4 Basis functions on the standard triangle . . . . . . . . . . . . . . . . . . . . . . . . 355.5 Discretizing the weighted residual equation . . . . . . . . . . . . . . . . . . . . . 375.6 Derivatives of the basis functions; Jacobian . . . . . . . . . . . . . . . . . . . . . 405.7 Numerical integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.8 Conductivity matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.9 Surface heat transfer matrix and load . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Steady-state heat diffusion solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.1 Steady-state diffusion equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.2 Thick-walled tube . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3 Orthotropic insert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.4 The T4 NAFEMS Benchmark . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7 Transient heat diffusion solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.1 Discretization in time for transient heat diffusion . . . . . . . . . . . . . . . . 617.2 Transient diffusion: The T3 NAFEMS Benchmark . . . . . . . . . . . . . . . 637.3 Transient cooling in a shrink-fitting application . . . . . . . . . . . . . . . . . . 65
8 Expanding the library of element types . . . . . . . . . . . . . . . . . . . . . . . . 698.1 Quadratic triangle T6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 698.2 Quadratic 1-D element L3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 718.3 Point element P1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 718.4 Measuring (integrating) over domains . . . . . . . . . . . . . . . . . . . . . . . . . . 728.5 On the simplex elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 748.6 Quadrilateral Q4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 758.7 Tetrahedron T4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
9 Convergence and error control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 779.1 First look at errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 779.2 Richardson extrapolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 789.3 The T4 NAFEMS Benchmark revisited . . . . . . . . . . . . . . . . . . . . . . . . . 789.4 Shrink fitting revisited . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Part III Stress analysis
10 Model of elastodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8310.1 Balance equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Part I
Introducing the Galerkin method

1
Model of a Taut Wire
This chapter will formulate a relatively simple model of a taut string. In the nextchapter, we will seek approximate solutions to this model that are obtained withthe Galerkin method.
1.1 Deriving the PDE model
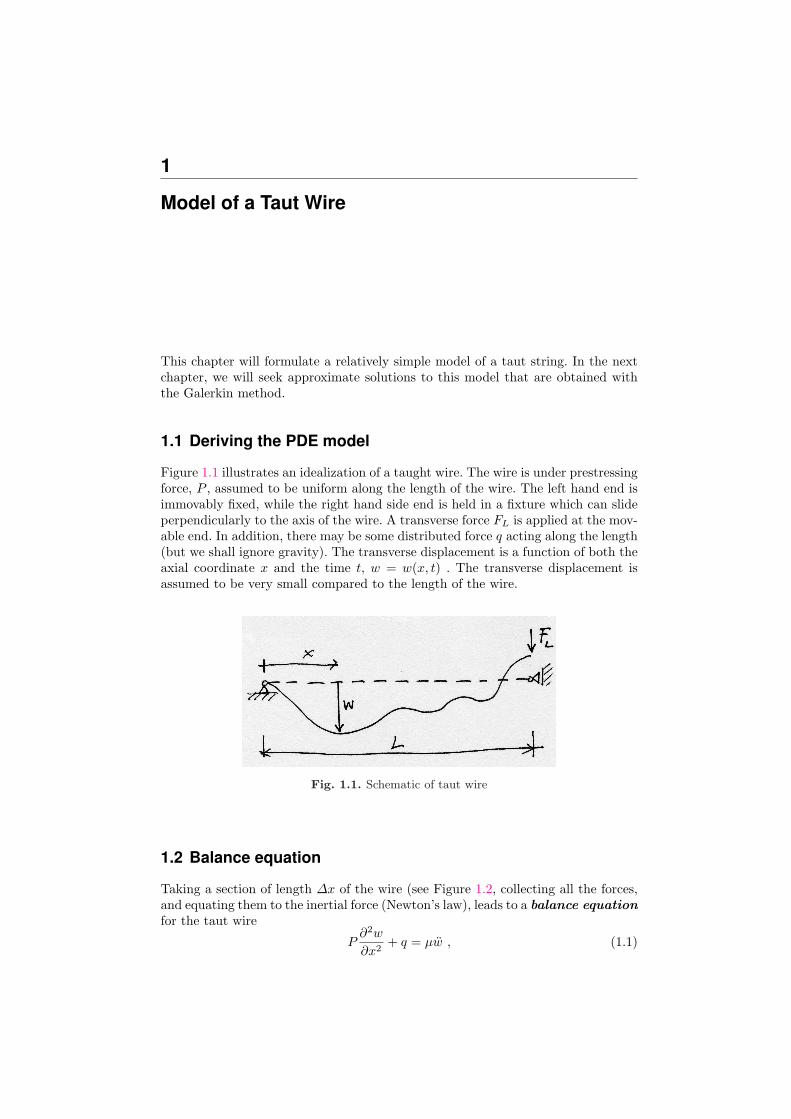
Figure 1.1 illustrates an idealization of a taught wire. The wire is under prestressingforce, P , assumed to be uniform along the length of the wire. The left hand end isimmovably fixed, while the right hand side end is held in a fixture which can slideperpendicularly to the axis of the wire. A transverse force FL is applied at the mov-able end. In addition, there may be some distributed force q acting along the length(but we shall ignore gravity). The transverse displacement is a function of both theaxial coordinate x and the time t, w = w(x, t) . The transverse displacement isassumed to be very small compared to the length of the wire.
Fig. 1.1. Schematic of taut wire
1.2 Balance equation
Taking a section of length ∆x of the wire (see Figure 1.2, collecting all the forces,and equating them to the inertial force (Newton’s law), leads to a balance equationfor the taut wire
P∂2w
∂x2+ q = µw , (1.1)

4 1 Model of a Taut Wire
where w = ∂2w∂t2 is the acceleration.
Fig. 1.2. The forces acting on a segment of the taut wire
1.3 Boundary conditions
The function w that describes the transverse deflection takes two arguments, x,and t. It is defined on a rectangle shown in Figure 1.3: 0 ≤ x ≤ L, and 0 ≤ t ≤ t.It needs to be determined to satisfy the balance equation (1.1), but that wouldnot completely nail the answer down. We also know something about the solution,namely at the boundaries of the domain rectangle.
How many pieces of information do we need to know? A reasonable answer is,‘Enough to make the solution unique.’ To find the deflection w is going to involveintegration, because the balance equation refers to space and time derivatives of w.Using the definitions
v =∂w
∂t
θ =∂w
∂x
we may rewrite all the balance equation that involves the second derivatives of thefunction w as a system of first order differential equations
∂θ
∂t=
∂v
∂x
T∂θ
∂x+ q − µ
∂v
∂t= 0
For each derivative ∂v∂x , ∂θ
∂x , one boundary condition (integration constant) willbe needed. Similarly, for each of the time derivatives ∂v
∂t , and ∂θ∂t one boundary
condition along the time axis will be required.
1.4 Boundary conditions (in space)
The conditions on w along the edges of the domain rectangle parallel to the timeaxis are known (for historical reasons) as the boundary conditions. (Perhaps alsobecause they are applied along the physical boundaries of the structure.)
At the left-hand side end of the wire we are prescribing in general nonzerodisplacement,

1.5 Initial conditions 5
Fig. 1.3. The domain of the deflection function w
w(0, t) = w0. (1.2)
As we shall find out, there is a good reason why this kind of condition is commonlycalled the essential boundary condition.
At the other end the boundary condition is of a different nature. It is also a bitmore interesting, as we have to derive it. Again, we take a short section of the wireof length ∆x (see Figure 1.4). This time there are terms that are multiplied by ∆x,but there are also others which are not. Only the latter survive when we make ∆xgo to zero.
− T∂w
∂x(L, 0) + FL = 0 . (1.3)
This boundary condition is simply the balance of forces at the end of the wire.Boundary conditions of this kind are called natural boundary conditions, andwe’ll find out presently why.
Fig. 1.4. The forces acting on a right hand side segment of the taut wire
1.5 Initial conditions
Along the edges of the domain rectangle that are parallel to the space axis we alsoapply two conditions. However, as we all are aware, the time direction is special.Therefore, it will probably come to us naturally to expect to know something aboutthe deflection at one point in time, typically at t = 0. Because this is the initialpoint along the time axis, these conditions are known as the initial conditions(and we need two of them):

6 1 Model of a Taut Wire
w(x, 0) = W (x),∂w
∂t(x, 0) = V (x) , (1.4)
where W (x) (the initial deflection) and V (x) (the initial velocity) are known func-tions.
1.6 Anything else?
The balance equation (1.1), the boundary conditions (1.2) and (1.3), and the initialconditions (1.4) are all we need to fully define what model it is we are trying tofind solutions to. It is an initial boundary value problem, and as such it isquite typical of the models with which structural engineers have to deal. In whatfollows, we shall find out how to formulate an algorithm, the so-called Galerkinfinite element method, which will supply an approximate solution to this problem.
2
The method of Mr. Galerkin
We will have to come to grips with the impossibility of satisfying the governingequation exactly with an approximate method. There’s going to be an error in thebalance equation (which we shall call a residual; another appropriate label might beimbalance). Similarly, the natural (force) boundary condition may not be satisfiedexactly, and there is going to be a residual there too.1
2.1 Residual of the balance equation
The balance equation (1.1) may be written in the residual form as
P∂2w
∂x2+ q − µw = rB(x, t) , (2.1)
by simply moving the inertial force on the other side of the equals sign. The residualrB is identically zero if w is the exact solution. For an approximate solution, theresidual rB varies from point to point, and from time to time, and is in generalnonzero.
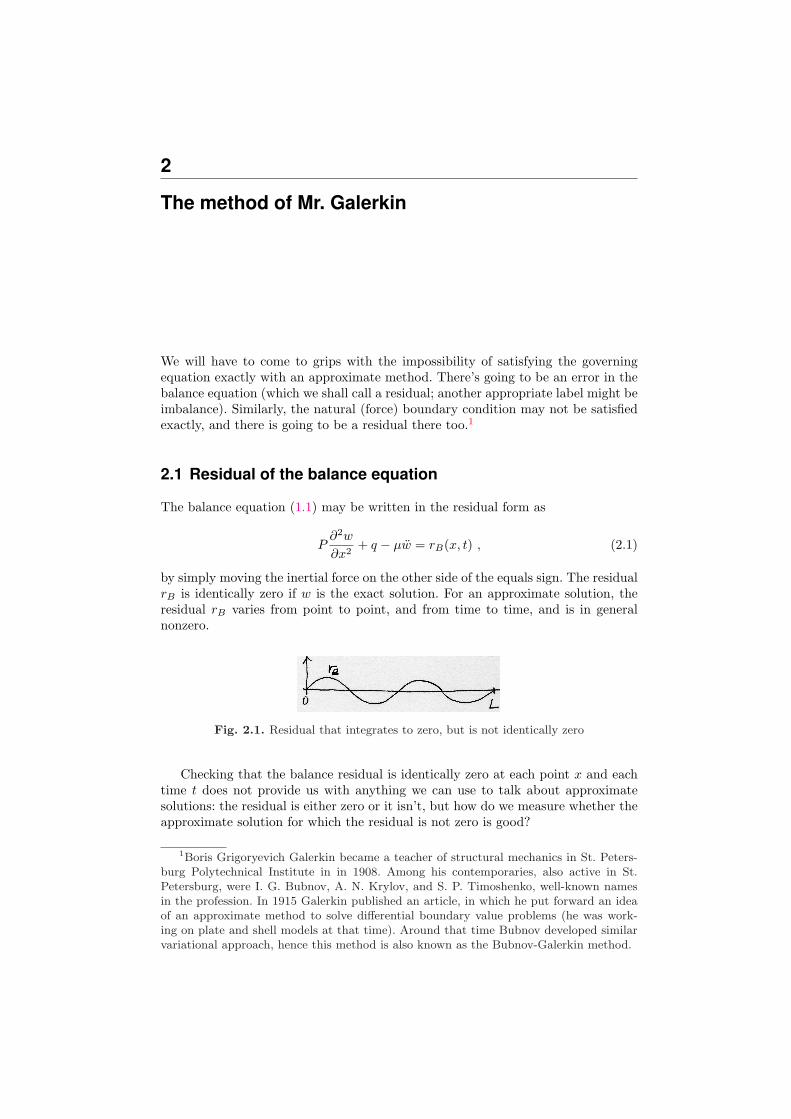
Fig. 2.1. Residual that integrates to zero, but is not identically zero
Checking that the balance residual is identically zero at each point x and eachtime t does not provide us with anything we can use to talk about approximatesolutions: the residual is either zero or it isn’t, but how do we measure whether theapproximate solution for which the residual is not zero is good?
1Boris Grigoryevich Galerkin became a teacher of structural mechanics in St. Peters-burg Polytechnical Institute in in 1908. Among his contemporaries, also active in St.Petersburg, were I. G. Bubnov, A. N. Krylov, and S. P. Timoshenko, well-known namesin the profession. In 1915 Galerkin published an article, in which he put forward an ideaof an approximate method to solve differential boundary value problems (he was work-ing on plate and shell models at that time). Around that time Bubnov developed similarvariational approach, hence this method is also known as the Bubnov-Galerkin method.

8 2 The method of Mr. Galerkin
2.2 Integral test of the residual
One possible choice of a quality measure is to integrate the residual over the domain(length of the wire). We could think of the integral
∫ L
0
rB(x, t) dx . (2.2)
as a test: if the residual is identically zero, this integral will also come out zero.However, (2.2) may be zero even when the residual is not identically zero. In otherwords, if we wanted to prove that the residual corresponds to an exact solution,this would be an incomplete and flawed test. Consider Figure 2.1: the integral(2.2) is zero, but the residual itself may be very large (for instance, when rB =A sin(2πnx/L), with n = 1, 2, ...).
2.3 Test function
A remedy that addresses this blindness of (2.2) to the shape of the residual may beto use a “window” (test) function η(x)
∫ L
0
η(x)rB(x, t) dx . (2.3)
Note that η(x) is an arbitrary function. In particular, it could be a function ofthe shape shown in Figure 2.2, which is certainly going to give a nonzero valuefor (2.3) (the hatched area at the bottom). Therefore, it correctly indicates thatthe residual does not correspond to the exact solution. Equation (2.3) is known asthe weighted residual statement . Approximate approaches that start from theweighted residual statement are known as weighted residual methods.
Fig. 2.2. Nonzero a residual which is detected in the integral (2.3)
Equation (2.3) is a reliable way of testing the residual, but computationally itseems hardly less difficult than testing the residual at each point of the domain:equation (2.3) needs to be evaluated for an infinite number of functions η in orderto make sure there are no bumps in the residual. The job will still take an infinitetime.
Let us contemplate a tangible analogy of what we’re trying to do in equa-tion (2.3). Imagine our job is to hold an inflatable balloon in a box, so that it doesnot jut out anywhere. Use the fingers of one hand to press down on the balloon,so that the balloon is at the top of the box in the spot where it is being held by
2.4 Trial function 9
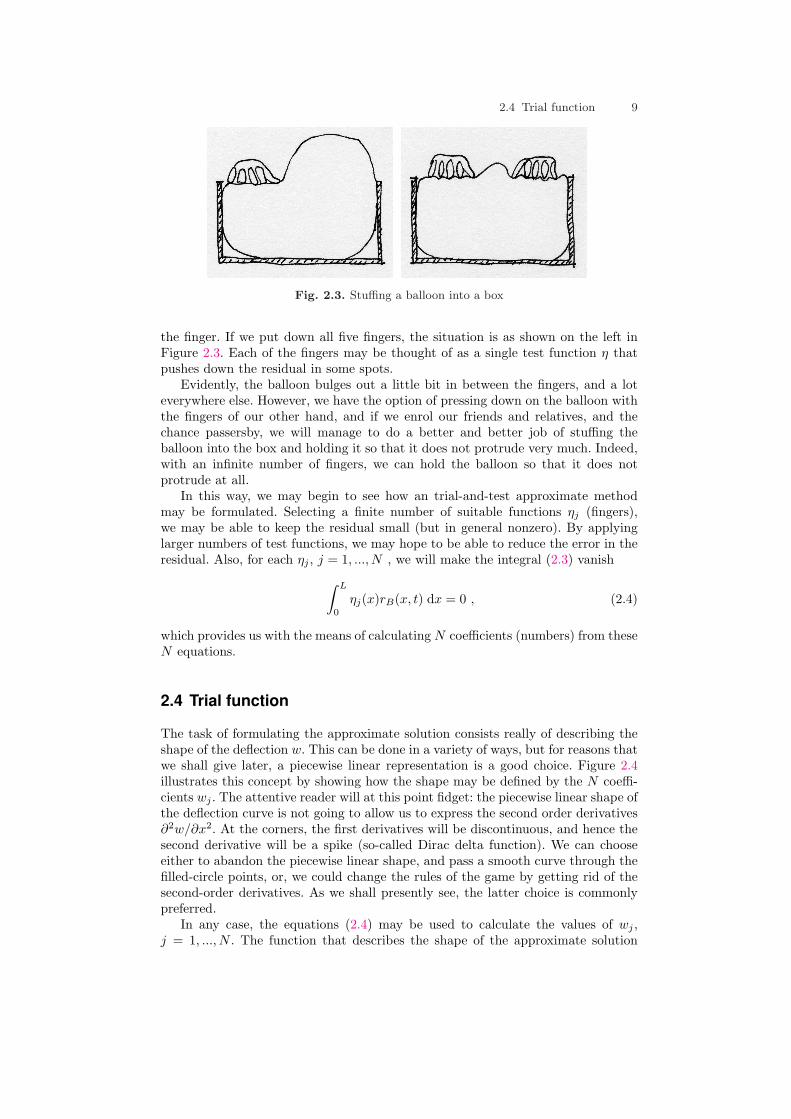
Fig. 2.3. Stuffing a balloon into a box
the finger. If we put down all five fingers, the situation is as shown on the left inFigure 2.3. Each of the fingers may be thought of as a single test function η thatpushes down the residual in some spots.
Evidently, the balloon bulges out a little bit in between the fingers, and a loteverywhere else. However, we have the option of pressing down on the balloon withthe fingers of our other hand, and if we enrol our friends and relatives, and thechance passersby, we will manage to do a better and better job of stuffing theballoon into the box and holding it so that it does not protrude very much. Indeed,with an infinite number of fingers, we can hold the balloon so that it does notprotrude at all.
In this way, we may begin to see how an trial-and-test approximate methodmay be formulated. Selecting a finite number of suitable functions ηj (fingers),we may be able to keep the residual small (but in general nonzero). By applyinglarger numbers of test functions, we may hope to be able to reduce the error in theresidual. Also, for each ηj , j = 1, ..., N , we will make the integral (2.3) vanish
∫ L
0
ηj(x)rB(x, t) dx = 0 , (2.4)
which provides us with the means of calculating N coefficients (numbers) from theseN equations.
2.4 Trial function
The task of formulating the approximate solution consists really of describing theshape of the deflection w. This can be done in a variety of ways, but for reasons thatwe shall give later, a piecewise linear representation is a good choice. Figure 2.4illustrates this concept by showing how the shape may be defined by the N coeffi-cients wj . The attentive reader will at this point fidget: the piecewise linear shape ofthe deflection curve is not going to allow us to express the second order derivatives∂2w/∂x2. At the corners, the first derivatives will be discontinuous, and hence thesecond derivative will be a spike (so-called Dirac delta function). We can chooseeither to abandon the piecewise linear shape, and pass a smooth curve through thefilled-circle points, or, we could change the rules of the game by getting rid of thesecond-order derivatives. As we shall presently see, the latter choice is commonlypreferred.
In any case, the equations (2.4) may be used to calculate the values of wj ,j = 1, ..., N . The function that describes the shape of the approximate solution

10 2 The method of Mr. Galerkin
(with the N free parameters) is known as the trial function. It describes a possible(candidate, trial) shape of the approximate solution; which becomes the solutiononce the values of the free parameters are known.
Fig. 2.4. Piecewise linear trial function
2.5 Manipulation of the residuals
We will seek the approximate solution w to satisfy the balance equation in theresidual form (2.4), and we’ll incorporate the boundary conditions and residualform too. The displacement boundary condition (1.2) will be included in the formof the residual
rw(t) = w(0, t)− w0(t). (2.5)
and the natural boundary condition (1.3) will be included as the residual
rF (t) = −P∂w
∂x(L, 0) + FL . (2.6)
Therefore, the approximate solution will be sought from the conditions
∫ L
0ηj(x)rB(x, t) dx = 0
ξwrw(t) = 0ξF rF (t) = 0
(2.7)
There are no conditions at this point on the trial function w other than smoothnessthat will guarantee the existence of the integrals in the first equation (2.7).
To reduce the complexity of (2.7), we may immediately realize that at the left-hand side end of the wire, we can quite simply design the trial function to makethe residual (2.5) identically zero. This will put another condition on w, and (2.7)may be cast as ∫ L
0ηj(x)rB(x, t) dx = 0
ξF rF (t) = 0(2.8)
where w(0, t) = w0(t), and w(x, t) sufficiently smooth in x.In this way we managed to reduce the number of residuals, but we will do even
better now. By applying integration by parts to the first equation in (2.8), we willbe able to reduce the number of residuals further, and furthermore, we will beable to make it much easier to design a trial function by allowing for less smoothfunctions.
Substituting for the balance residual, we get three terms

2.6 Stiffness and mass matrix 11
∫ L
0
ηj(x)rB(x, t) dx =∫ L
0
ηj(x)P∂2w
∂x2(x) dx +
∫ L
0
ηj(x)q(x) dx−∫ L
0
ηj(x)µ(x)w(x, t) dx
(2.9)
Integration per partes will not affect the second and third term on the right handside, but for the first term we obtain
∫ L
0
ηjP∂2w
∂x2dx =
[ηjP
∂w
∂x
]L
0
−∫ L
0
∂ηj
∂xP
∂w
∂xdx (2.10)
The bracketed term is fraught with possibilities. Number one, we may recognizepart of the bracket in equation (2.6). In fact, if we propose to satisfy rF = 0 at theright hand side end of the wire (x = L) identically, we may simply replace P ∂w
∂x(which is known there) with FL. That takes care of the force residual (2.6). Numbertwo, at the left-hand side end of the wire the value of P ∂w
∂x is unknown, but wehave the option of making ηj vanish at x = 0. This will burden all the ηj ’s with acondition, ηj(x = 0) = 0, but that is something we can afford.
We are in a position to summarize: We have been able to avoid the need tocarry the displacement residual (2.5) [eliminated by design of the trial function] andthe force residual (2.6) [incorporated into the balance residual– hence, “natural”boundary condition]. Therefore, we will try to find the approximate solution w tosatisfy the balance equation in the residual form
ηj(L)FL−∫ L
0
∂ηj
∂xP
∂w
∂xdx +
∫ L
0
ηjq dx−∫ L
0
ηjµw dx = 0, j = 1, ..., N (2.11)
whereηj(x = 0) = 0, ηj ∈ C0, j = 1, ..., Nw(x = 0, t) = w0(t), w ∈ C0,
w(x, t = 0) ≈ W (x),∂w
∂t(x, t = 0) ≈ V (x).
(2.12)
We write for the trial function w ∈ C0 and similarly for the test functions. Thisliterally means that the functions are continuous, which is a substitute here fora more precise mathematical statement, but which nevertheless ensures that theintegrals in (2.11) exist.
The initial conditions need to be suitably approximated, in general we will notbe able to satisfy them exactly (which is why we write ≈). Typically, interpolationis used.
2.6 Stiffness and mass matrix
It is time to come back to the choice of the test and trial functions. As advertisedin Section 2.4, we have been able to change the requirements on the test and trialfunction: Their derivatives are now balanced– only the first-order derivatives areneeded for both. Therefore, the piecewise linear interpolation function of Figure 2.4is now an possibility. However, we can still forge ahead while keeping our optionsopen.
Let us make the assumption that the time is fixed t = t (t some given number).To describe the trial function, we will resort to a common technique in interpola-tion which is to write the interpolant as a linear combination of basis functions.Therefore, let us assume that the trial function is written as

12 2 The method of Mr. Galerkin
w(x, t) =N∑
i=1
Ni(x)wi(t) (2.13)
where by wi(t) we simply mean that the coefficients of the linear combinationwi are actually functions of time, evaluated at the particular time t. Substitutinginto (2.12), we obtain
ηj(L)FL −∫ L
0
∂ηj
∂xP
N∑
i=1
∂Ni
∂xwi(t) dx+
∫ L
0
ηjq dx−∫ L
0
ηjµ
N∑
i=1
Niwi(t) dx = 0, j = 1, ..., N ,
(2.14)
which may be simplified to
ηj(L)FL −N∑
i=1
(∫ L
0
∂ηj
∂xP
∂Ni
∂xdx
)wi(t)+
∫ L
0
ηjq dx−N∑
i=1
(∫ L
0
ηjµNi dx
)wi(t) = 0, j = 1, ..., N ,
(2.15)
With the definitions
Kji =∫ L
0
∂ηj
∂xP
∂Ni
∂xdx , (2.16)
where Kji is usually referred to as the stiffness matrix, and
Mji =∫ L
0
ηjµNi dx , (2.17)
where Mji is the mass matrix, we may write (2.15) as
ηj(L)FL −N∑
i=1
Kjiwi(t) +∫ L
0
ηjq dx−N∑
i=1
Mjiwi(t) = 0, j = 1, ..., N , (2.18)
The matrix equation (2.29) is a system of coupled ordinary differential equations(evaluated at time t), where the coupling is effected by the matrices Kji and Mji.The linear algebra is going to be much more efficient if the two matrices are sym-metric and sparse.
The first property will follow if we take as the test functions ηj the basis functionsthemselves, ηj ≡ Ni. The second property may be achieved if the basis functionsNi are nonzero only on a small subset of the interval 0 ≤ x ≤ L.
2.7 Piecewise linear basis functions
Lets us get back to the piecewise linear approximation we advertised for the trialfunction in Section 2.4. The broken line cannot be represented as a linear combina-tion of linear functions that are all defined on the whole interval 0 ≤ x ≤ L (onlytwo such functions are linearly independent, and these functions cannot representthe corners in the broken line). Therefore, we have to describe the piecewise linearcurve interval-by-interval.

2.7 Piecewise linear basis functions 13
A common technique in interpolation is to write the interpolant as a linearcombination of basis functions. In one dimension, the piecewise linear basis functionis called the hat functions. The six functions that are shown in Figure 2.5, all areexamples of hat functions. For reasons that will be discussed later, we would wantthe hat functions as the constituent parts of a linear combination to be able toreproduce an arbitrary linear function over the whole interval. Because of the wayin which we construct the hat functions in Figure 2.5, this property is automaticallyavailable.
Fig. 2.5. Piecewise linear basis functions
Let us describe the construction of the piecewise linear basis functions. (Inthis book, the one-dimensional elements with two nodes at the end points aregoing to be referred to as L2.) First, the length of the wire is divided into disjointsubintervals. These subintervals are the finite elements for the one-dimensionalproblem. The end-points of the finite elements are called nodes. Together, the finiteelements and the nodes are known as the finite element mesh: see Figure 2.6 (theelement numbers are in the boxes; nodes are indicated by filled circles). Since allbasis functions are constructed in the same way, we show the procedure for basisfunction N3: as shown in the Figure 2.5, it is nonzero over two elements, 2 and 3;zero everywhere else. To be able to write it down over the two adjacent elements,we have to agree on the value of N3 at node 3 (i.e. N3(x3)), which is shared byelements 2 and 3. Choosing N3(x3) = 1 has certain advantages, which will beintroduced momentarily. Using the concept of Lagrange interpolation polynomials,we may write the function N3 within element 2 as
N3(x) =x− x2
x3 − x2, x2 ≤ x ≤ x3
and within element 3 as
N3(x) =x− x4
x3 − x4, x3 ≤ x ≤ x4 .

14 2 The method of Mr. Galerkin
All the other functions are expressed analogously. Putting them together in a linearcombination for the trial function, we write
w(x) =N∑
i=1
Ni(x)wi
(for simplicity, we omit the time argument). Evaluating w(x) at node k, we obtain
w(xk) =N∑
i=1
Ni(xk)wi
where the crucial expression is Ni(xk): by definition, the basis function Nk hasvalue +1 at xk, while all other functions Ni, i 6= k are zero at xk. This property isusually expressed mathematically as
Ni(xk) = δik , (2.19)
where the symbol δik is known as the Kronecker delta
δik ={
1, if i = k;0, otherwise.
Because of this property, the value of w(xk) is
w(xk) =N∑
i=1
Ni(xk)wi =N∑
i=1
δikwi = wk ,
and the parameters wi have the physical meaning of the value of the interpolatedfunction at the node i. The wi’s are usually called the degrees of freedom, sincebeing the control parameters of the trial function, they determine the shape ofthe actual solution from all the possible shapes of the trial function. They are theobjects that our numerical method solves for.
Fig. 2.6. The finite element mesh
2.8 Numerical quadrature
While in the preceding section we described how to compute the basis function N3
by visiting the adjacent finite elements on which the function was nonzero, the taskin an actual finite element program is different. The algorithm there is designedto facilitate numerical evaluation of the integrals in the residual equations. Theintegrals are calculated element-by-element (the integrands are in general discon-tinuous from element to element). Therefore, instead of being interested in a singlebasis function at any point within the mesh, we will rather be striving to calculate

2.8 Numerical quadrature 15
Fig. 2.7. Two different views on how to evaluate basis functions in the finite elementmesh: top – compute a single basis function over the whole mesh; bottom – compute allnonzero basis functions over a single element.
the values (and their derivatives) of all the nonzero basis functions at a particularpoint (the quadrature point) within a single finite element ; see Figure 2.7. In theelement-centric view, we would evaluate the functions associated with the nodesat the endpoints of the element. Say for element connecting nodes i, and j, thefunctions Ni and Nj would be expressed as
Ni(x) =x− xj
xi − xj, Nj(x) =
x− xi
xj − xi(2.20)
It is common practice to develop numerical integration rules on standard inter-vals. Often that will be −1 ≤ ξ ≤ +1 (line elements in one dimension, quadrilateralsin two dimensions, and bricks in three dimensions all use this interval definition inso-called tensor-product forms). For instance, Simpson’s 1/3 rule is given on thisinterval as
∫ +1
−1
f(ξ)dξ ≈ 13f(ξ = −1) +
43f(ξ = 0) +
13f(ξ = +1)
In general, a numerical quadrature rule would be written on the standard interval−1 ≤ ξ ≤ +1 as ∫ +1
−1
f(ξ)dξ ≈M∑
k=1
f(ξk)Wk (2.21)
where ξk are the locations of the integration points, and Wk are their weights.Integrating numerically arbitrary functions over arbitrary intervals is then madepossible by a map from the standard interval −1 ≤ ξ ≤ +1 to the arbitrary intervala ≤ x ≤ b
x =12(a + b) +
12(b− a)ξ (2.22)
(the first part is the midpoint of the interval a ≤ x ≤ b, the second part is the depar-ture from the midpoint to either side). Because this map is linear, the relationshipbetween the differentials is constant,
dx =12(b− a)dξ
where the factor 12 (b−a) is called the Jacobian determinant. The Simpson’s 1/3
rule is for an arbitrary interval a ≤ x ≤ b expressed as∫ b
a
f(x)dx ≈ 12(b− a)
[13f(ξ = −1) +
43f(ξ = 0) +
13f(ξ = +1)
]
In general, if the map is

16 2 The method of Mr. Galerkin
x = g(ξ) (2.23)
and the numerical quadrature over an arbitrary interval may be written as
∫ b
a
f(x)dx ≈M∑
k=1
f(ξk)∂g
∂ξ(ξk)Wk (2.24)
where ∂g∂ξ (ξk) is the Jacobian determinant evaluated at the quadrature point ξk.
Lets us now look at the integrals in the mass matrix (2.17). The integral will beevaluated over each element individually, and these contributions will be summedtogether. Therefore, let us consider the integral (2.17)over a single element, con-necting nodes i and j ∫ xj
xi
Nj(x)µ(x)Ni(x) dx .
Notice that we are not getting the indexes mixed up: Nj and Ni are the onlytwo basis functions which are nonzero over the interval xi ≤ x ≤ xj . Clearly, thefunction f(x) in equation (2.24) is
Nj(x)µ(x)Ni(x)
which means that we have to express the basis functions in terms of ξ (µ(x) istypically constant over an element). However, we have the map (2.22), which uponsubstitution into (2.20) yields
Ni(ξ) =ξ − 1−2
, Nj(ξ) =ξ + 1+2
(2.25)
Basis functions expressed on the standard interval (2.25) are sometimes referredto as being expressed in the parametric coordinates. It is noteworthy that (2.25)are just the Lagrange interpolation polynomials on the standard interval. As weshall see later, writing down the basis functions over a standard shape – a squarefor general quadrilaterals, a cube for general brick elements, standards trianglesor standard tetrahedra for general triangles or general tetrahedra, and so on– isnot only convenient, but also highly advisable from the point of view of computerimplementation: most of the code for different element shapes and types is thenshared, and does not have to be repeated. However, it does mean that we have toexpress the derivative of the basis functions using a chain rule:
∂Ni(ξ)∂x
=∂Ni(ξ)
∂ξ
∂ξ
∂x(2.26)
The partial derivative ∂ξ∂x is readily available from (2.22), and may be identified as
the inverse of the Jacobian. To state the integral of the term corresponding to themass matrix
∫ xj
xi
Nj(x)µ(x)Ni(x) dx ≈ 12(xj − xi)
M∑
k=1
∂Nj
∂x(ξk)
∂Ni
∂x(ξk)Wk.
where (2.26) is used to evaluate the derivatives of the basis functions.At a first sight, the integrals in the stiffness matrix (2.16), and in the mass
matrix (2.17), the latter will seem to require a more accurate numerical quadraturerule: the stiffness matrix involves products of the derivatives of the basis functions,which for linear basis functions are constants; the mass matrix, on the other hand,

2.9 Putting it together: system of ODE’s 17
requires products of the basis functions themselves, which are linear functions ofx. Therefore, the stiffness matrix will result from integrals of constants, while themass matrix is the result of integrals of quadratic functions. However, at timesincreased efficiency and even accuracy may be achieved if the mass matrix is notintegrated exactly, in particular diagonal mass matrices are often used to achieveboth benefits.
The numerical quadratures that are in common use with polynomial finite el-ements are the Gaussian rules. They are well described in a number of textbooks,see for instance Reference [CC2005], and we are going to introduce them later.
2.9 Putting it together: system of ODE’s
Applying the piecewise linear basis functions derived in Section 2.7 to equa-tion (2.29) is a straightforward. The unknown degrees of freedom are w2(t), w3(t),..., wN (t); the function w1(t) is given by the boundary conditions: the condi-tion w(x = 0, t) = w0(t) becomes, as a result of the Kronecker delta property,w1(t) = w0(t).
The stiffness and mass matrices will be symmetric, tri-diagonal, i.e.
Kji =∫ L
0
∂Nj
∂xP
∂Ni
∂xdx
{ 6= 0, if |i− j| ≤ 1;= 0, otherwise. , (2.27)
and
Mji =∫ L
0
NjµNi dx
{ 6= 0, if |i− j| ≤ 1;= 0, otherwise. , (2.28)
Equation (2.15) is trivially modified to read
Nj(L)FL −N∑
i=1
Kjiwi(t) +∫ L
0
Njq dx−N∑
i=1
Mjiwi(t) = 0, j = 2, ..., N , (2.29)
Note that j runs from 2 (as explained above), but i ranges over all nodes, i.e.also the first degree of freedom is included, even though it is determined from theboundary condition. In effect, nonzero displacement w1(t) generates an externalforce with the jth component
−Kj1w1(t)−Mj1w1(t) .
The second order differential equations (2.29) may be integrated for instance byconverting them to first order form and using an off-the-shelf Matlab integrator.However, because of their special form, there are excellent custom-tailored algo-rithms for this purpose: for example the Newmark explicit algorithm.


3
Introducing the Matlab code
In this chapter we will introduce a finite element library (or toolbox, if you prefer),SOFEA1. It will be used to produce finite element solutions using the results of theprevious chapter for the Galerkin method. SOFEA implementation is in Matlab, andits design is based on the object oriented support in Matlab (release 14 and later).In particular, all the methods and algorithms are present in the library as classes,or methods defined for classes.
3.1 Statics
When the inertial forces may be neglected in the balance equation, we have the caseof statics (static equilibrium). The Galerkin formulation simply drops the termswith the accelerations, and reads
Nj(L)FL −N∑
i=1
Kjiwi +∫ L
0
Njq dx = 0, j = 2, ..., N , (3.1)
which may be arranged in matrix form as
Kd = L (3.2)
where K is a square (N − 1) × (N − 1) matrix collecting Kji, i, j = 2, ..., N . Thecolumn matrix d collects the degrees of freedom dk = wk+1, k = 1, ..., N − 1. Thecolumn matrix L is the load vector, with components
Lk = Nk+1(L)FL −Kk+1,1w1 +∫ L
0
Nk+1q dx = 0, k = 1, ..., N − 1 , (3.3)
3.2 Statics: uniform load
Furthermore, we assume the transverse load q is uniform, and the transverse forceis absent, FL = 0. The Matlab script implementing the solution is taut_wire/w1.It starts with the definition of the variables.
0001 disp(’Taut wire: example 1-- statics, uniform load’);0002 L=6;0003 P=4;0004 q =-0.1;
1SOFEA is c©2005, Petr Krysl
20 3 Introducing the Matlab code
Next, the mesh is defined: an array of nodes is created, with node 1 at x = 0 and soon. The function fenode is the constructor of the class fenode, and the attributesare being passed as fields of a struct, as pairs “name, value” (for instance, ’id’,j):this approach is uniformly adopted for all constructors. The array gcells collectsfinite elements of the type gcell l2. The attribute conn is the connectivity: thenumbers of nodes that are connected by the element. The finite elements are referredto as geometric cells. The main reason is that the finite elements have ratherlimited responsibilities in SOFEA, namely calculation of the basis functions (andtheir derivatives), and drawing of the shape of the cell are essentially all that isrequired.
0005 n=2; % number of elements0006 % Mesh0007 x=0;0008 fens=[];0009 for j= 1:n+10010 fens=[fens fenode(struct (’id’,j,’xyz’,[x]));];0011 x = x+(L/n);0012 end0013 gcells = [];0014 for j= 1:n0015 gcells = [gcells gcell l2(struct(’id’,j,’conn’,[j j+1]))];0016 end
The operations on the mesh that reflect the particular problem that is being solvedare encapsulated in the class descended from the finite element block, feblock.In particular, the prestressed wire stiffness and mass matrix, the effect of the dis-tributed load, q, and the effect of the nonzero displacement at x = 0, are computedby the methods of the class feblock defor taut wire. Note that Simpson’s 1/3rule is being used for the numerical quadrature. The finite element block consistsof all the finite elements.
0017 % Finite element block0018 feb = feblock defor taut wire(struct (’mater’,mater defor,...0019 ’gcells’,gcells,...0020 ’integration rule’,simpson 1 3 rule,...0021 ’P’,P));
The quantities that are interpolated on the finite element mesh, such as thetransverse displacement of the wire, w, or the geometry of the mesh, are representedin SOFEA as instances of the class field. The field geom records the geometry of themesh. The constructor on line 0023 retrieves this information from the array of thenodes. The dimension of the field is 1 because each degree of freedom is just a singledisplacement. On line 0025 we define the field of the transverse displacements, w.For convenience, it is defined by cloning the geom field, and then zeroing out all thedegrees of freedom.
0022 % Geometry0023 geom = field(struct (’name’,[’geom’], ’dim’, 1, ’fens’,fens));0024 % Define the displacement field0025 w = 0*clone(geom,’w’);
Next, the displacement (essential) boundary conditions are defined, and appliedto the displacement field. The method set ebc simply records which componentsof the degrees of freedom, at which node, are being prescribed (or released), and
3.2 Statics: uniform load 21
to which value are they being prescribed. The method apply ebc is then used totransfer this information to the actual degrees of freedom. Finally, the methodnumbereqns numbers the degrees of freedom that are not being prescribed, effec-tively assigning each one a global equation number.
An important remark should be made here: Lines 0028, 0029, and 0030 illustratea design feature of Matlab, where all arguments are passed by value. Therefore, nomatter what we do with the arguments inside the functions, the values that werepassed by the caller into those functions do not change at all. The functions workwith copies, not the actual variables that the caller passed. If the caller wishes tochange the variables, the method must return the changed value, and the callermust assign this value. Example: on line 0031 the method numbereqns will numberthe equations in a copy of the field w, and then will return the copy. Since we assignback to the field w, the computed numbering of the equations will be now availablein w; if we did not sign back to w, all the work done by the method numbereqnswould be forgotten.
0026 % Apply EBC’s0027 fenids=[1]; prescribed=[1]; component=[1]; val=0;0028 w = set ebc(w, fenids, prescribed, component, val);0029 w = apply ebc (w);0030 % Number equations0031 w = numbereqns (w);
Next we create the global system equations. The stiffness matrix is an object, K,which gets created in line 0033, and initialized to represent a dense neqns×neqnsmatrix. In line 0034, the stiffness matrices calculated for each finite element by theblock feb are assembled into the global matrix K (class dense sysmat). The numberof equations is being retrieved from the displacement field (the globally equationnumbers have been placed there above) using the get method. The get methodis available for all SOFEA objects, and just typing w at the command line producesa list of all the properties that can be obtained from the object. A great way inwhich objects may be explored is the graphical user interface of the object browser,OBgui (part of SOFEA). Its operation is supported by the output of get(w) (noticethat only the object itself is passed as argument): using get in this way returns acell array, with the name and the description of each attribute.
0032 % Assemble the system matrix0033 K = start (dense sysmat, get(w, ’neqns’));0034 K = assemble (K, stiffness(feb, geom, w));
The load q is in this case represented by the body load class. The global load objectsysvec is assembled from element load vectors computed by the finite elementblock.
0035 % Load0036 bl = body load(struct (’magn’,inline(num2str(q))));0037 F = start (sysvec, get(w, ’neqns’));0038 F = assemble (F, body loads(feb, geom, w, bl));
Finally, the global stiffness object is asked to produce the actual stiffness array,and the global load object is asked to supply the actual load vector. The standardbackslash Matlab operator than produces the solution, which is then stored in theproper places in the displacement field w. The method scatter sysvec distributesthe system vector (the solution of the system of linear equations) to the properdegrees of freedom, and we should note that again the result is assigned to w.
22 3 Introducing the Matlab code
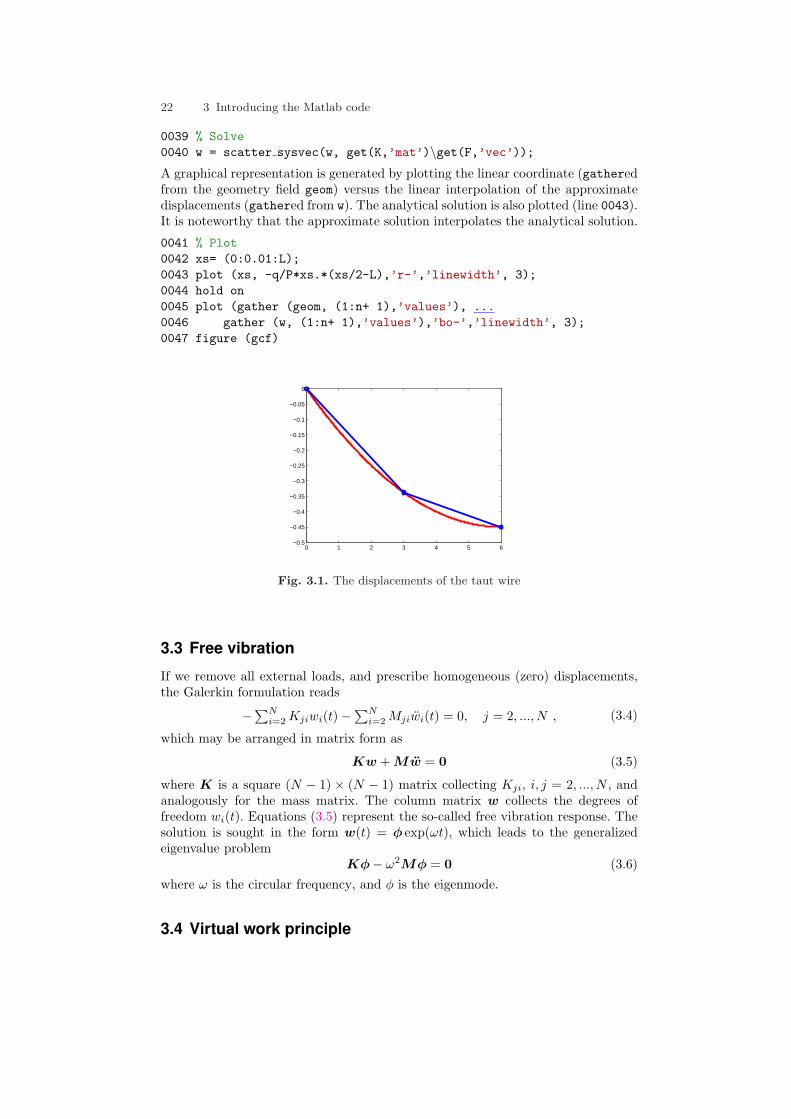
0039 % Solve0040 w = scatter sysvec(w, get(K,’mat’)\get(F,’vec’));A graphical representation is generated by plotting the linear coordinate (gatheredfrom the geometry field geom) versus the linear interpolation of the approximatedisplacements (gathered from w). The analytical solution is also plotted (line 0043).It is noteworthy that the approximate solution interpolates the analytical solution.
0041 % Plot0042 xs= (0:0.01:L);0043 plot (xs, -q/P*xs.*(xs/2-L),’r-’,’linewidth’, 3);0044 hold on0045 plot (gather (geom, (1:n+ 1),’values’), ...0046 gather (w, (1:n+ 1),’values’),’bo-’,’linewidth’, 3);0047 figure (gcf)
0 1 2 3 4 5 6−0.5
−0.45
−0.4
−0.35
−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
0
Fig. 3.1. The displacements of the taut wire
3.3 Free vibration
If we remove all external loads, and prescribe homogeneous (zero) displacements,the Galerkin formulation reads
−∑Ni=2 Kjiwi(t)−
∑Ni=2 Mjiwi(t) = 0, j = 2, ..., N , (3.4)
which may be arranged in matrix form as
Kw + Mw = 0 (3.5)
where K is a square (N − 1) × (N − 1) matrix collecting Kji, i, j = 2, ..., N , andanalogously for the mass matrix. The column matrix w collects the degrees offreedom wi(t). Equations (3.5) represent the so-called free vibration response. Thesolution is sought in the form w(t) = φ exp(ωt), which leads to the generalizedeigenvalue problem
Kφ− ω2Mφ = 0 (3.6)
where ω is the circular frequency, and φ is the eigenmode.
3.4 Virtual work principle
Part II
Thermal analysis

4
Model of Heat Diffusion
4.1 Balance equation
In this section, our goal is to derive the balance equation that governs heat conduc-tion in solids as a partial differential expression. It will be converted to a residualform, which will then be treated with the Galerkin method.
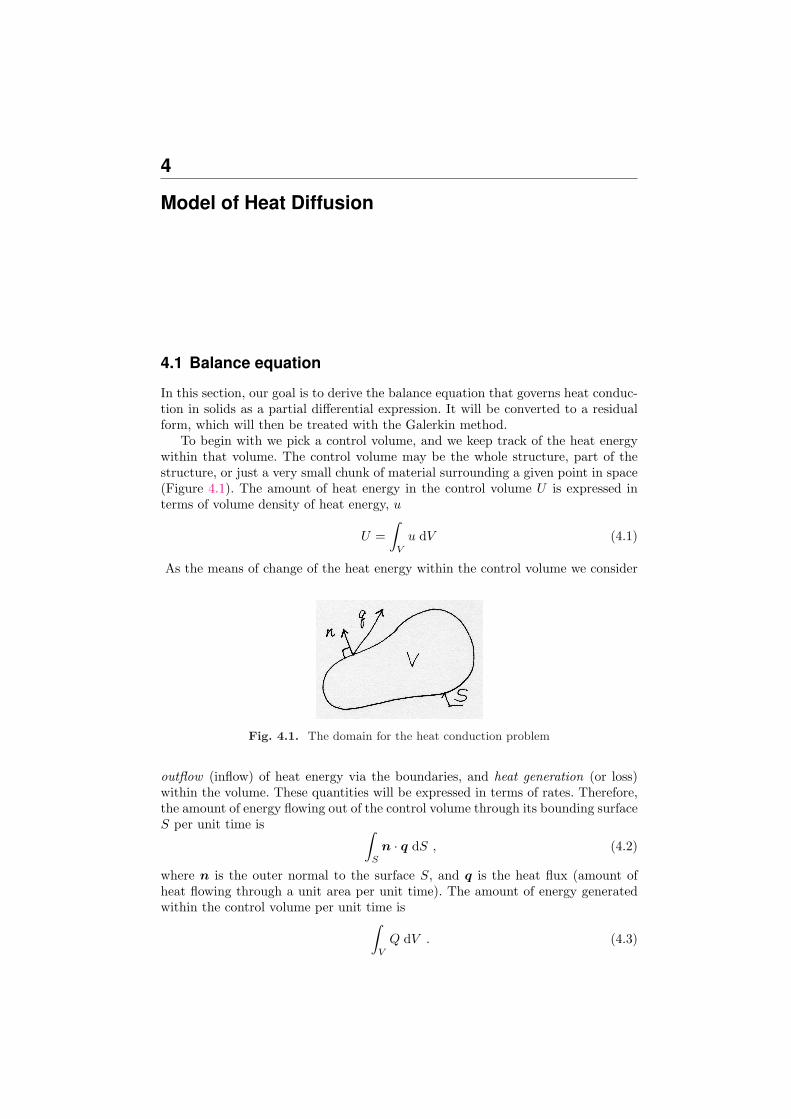
To begin with we pick a control volume, and we keep track of the heat energywithin that volume. The control volume may be the whole structure, part of thestructure, or just a very small chunk of material surrounding a given point in space(Figure 4.1). The amount of heat energy in the control volume U is expressed interms of volume density of heat energy, u
U =∫
V
u dV (4.1)
As the means of change of the heat energy within the control volume we consider
Fig. 4.1. The domain for the heat conduction problem
outflow (inflow) of heat energy via the boundaries, and heat generation (or loss)within the volume. These quantities will be expressed in terms of rates. Therefore,the amount of energy flowing out of the control volume through its bounding surfaceS per unit time is ∫
S
n · q dS , (4.2)
where n is the outer normal to the surface S, and q is the heat flux (amount ofheat flowing through a unit area per unit time). The amount of energy generatedwithin the control volume per unit time is
∫
V
Q dV . (4.3)

26 4 Model of Heat Diffusion
where Q is the rate of heat generation per unit volume; for example, heat is releasedor consumed by various deformation and chemical processes (as work of viscousstresses, reaction product of curing concrete or polymer resins, and so on).
Collecting the terms, we can write for the change of the heat energy within thecontrol volume the rate equation
dU
dt= −
∫
S
n · q dS +∫
V
Q dV . (4.4)
Finally, differentiating U with respect to time will be possible if we assume thatU = U(T ), i.e. if U is a function of the absolute temperature T . Holding the controlvolume fixed in time, the time differentiation may be taken inside the integral overthe volume
dU
dt=
ddt
∫
V
u dV =∫
V
du
dtdV , (4.5)
and with the application of the chain rule, the relationship (4.5) is expressed as
dU
dt=
∫
V
du
dtdV =
∫
V
du
dT
∂T
∂tdV , (4.6)
The quantity cV = dudT is a characteristic property of a solid material (called specific
heat at constant volume), and needs to be measured. It is typically dependent ontemperature, but we will assume that it is a constant; otherwise it leads to nonlinearmodels.
Substituting, we write∫
V
cV∂T
∂tdV = −
∫
S
n · q dS +∫
V
Q dV . (4.7)
This equation consists of volume integrals and a surface integral. If all the integralswere volume integrals, over the same volume of course, we could proclaim thatthe integral statement (sometimes called a global balance equation) would holdprovided the integrands satisfied a so-called local balance equation (recall that toget the local balance equation is our goal). For instance, from the integral statement
∫
V
α∂M
∂tdV =
∫
V
µ dV , (4.8)
where α, M , and µ are some functions, one could conclude that
α∂M
∂t= µ , (4.9)
which is a local version of (4.8). An argument along these lines could for instanceinvoke the assumption that the volume V was arbitrary, and that it could be shrunkaround a given point, which in the limit would allow the volume to be canceled onboth sides of the equation.
To execute this program for equation (4.7), we have to convert the surfaceintegral to a volume integral. We have the needed tool in the celebrated divergencetheorem . ∫
V
divq dV =∫
S
n · q dS , (4.10)
where the divergence of the flux vector is defined in Cartesian coordinates as
divq =∂qx
∂x+
∂qy
∂y+
∂qz
∂z.

4.2 Constitutive equation 27
Consequently, equation (4.7) may be rewritten∫
V
cV∂T
∂tdV = −
∫
V
divq dV +∫
V
Q dV . (4.11)
and grouping the terms as∫
V
[cV
∂T
∂t+ divq −Q
]dV = 0 . (4.12)
we may conclude that the inside of the bracket has to vanish since the volume couldbe entirely arbitrary. Therefore, we arrive at the local balance equation
cV∂T
∂t+ divq −Q = 0 . (4.13)
4.2 Constitutive equation
Equation (4.13) contains too many variables: both temperature and heat flux. Sinceit is a scalar equation, the logical next step is to express the heat flux in terms oftemperature. That is the contents of the Fourier model: heat flows opposite to thegradient of the temperature (downhill). In matrix form
q = −κ(gradT )T . (4.14)
The matrix κ is the conductivity matrix of the material. The most common formsof κ are
κ = κ1 (4.15)
for the so-called thermally isotropic material, and
κ =
κx 0 00 κy 00 0 κz
(4.16)
for materials that have three orthogonal directions of different thermal conductiv-ities (orthotropic material); κ is the isotropic thermal conductivity coefficient, 1is the identity matrix, and κx, κy, and κz are the orthotropic thermal conductiv-ities. (Some materials have preferred directions in which heat would like to flow,for instance along the fibers in a composite. Visually, we can imagine a corrugatedsteel roof, with the channels running not directly downhill, but tilted away from theslope – the water would run preferentially in the channels, but generally downhill.)
The funny looking transpose of the temperature gradient follows from the defi-nition: the gradient of the scalar is a row matrix
gradT =(
∂T∂x
∂T∂y
∂T∂z
)(4.17)
With the constitutive equation, the balance equation (4.13) is now purely interms of the absolute temperature,
cV∂T
∂t− div
[κ(gradT )T
]−Q = 0 . (4.18)

28 4 Model of Heat Diffusion
4.3 Boundary conditions
From now on, V is going to be the volume of the whole solid of interest. The mostimportant fact about the boundary conditions is that we need to have a boundarycondition at each point of the surface S. As we expect by now, the model is abouttemperature. Correspondingly, the boundary conditions are an expression of ourknowledge of the temperature distribution in the solid.
The simplest boundary condition results if we know the surface temperaturealong one part of S at all times. This part of the surface will be called S1 (seeFigure 4.2).Therefore,
T (x, t)− T (x, t) = 0, x on S1 . (4.19)
where by x we mean the position vector. This type of condition is known as theprimary, or essential, boundary condition.
The heat flux entering or leaving the solid may also be known (measured by aheat flux gauge). Generally, we do not know the heat flux along the surface, onlythe normal component, which is obtainable from the normal and the heat flux asqn = n ·q. Therefore, along the part of the surface S2 the normal component of theheat flux may be prescribed
n · q − qn = 0, on S2 . (4.20)
All quantities are given at a particular point on the boundary as functions of time,similarly to the first boundary condition. This type of condition is known as thenatural (or flux) boundary condition.
In the last example of a boundary condition, we will mention the heat transferdriven by a temperature difference at surface. The normal component of the heatflux is given as
n · q − h(T − Ta) = 0, on S3 . (4.21)
where Ta is the known temperature of the surrounding medium (ambient temper-ature), and h is the heat transfer coefficient.
Fig. 4.2. The subdivision of the surface for the purpose of the boundary conditionapplication
4.5 Summary of the PDE model of heat conduction 29
4.4 Initial condition
The primary variable in our problem is the temperature, T , and it is present in thebalance equation (4.18) with the first order time derivative. Therefore, we will needone initial condition,
T (x, 0) = T 0(x) in V . (4.22)
The initial condition must be match with boundary conditions on S1 at time t = 0:
T 0(x) = T (x, 0), x on S1 . (4.23)
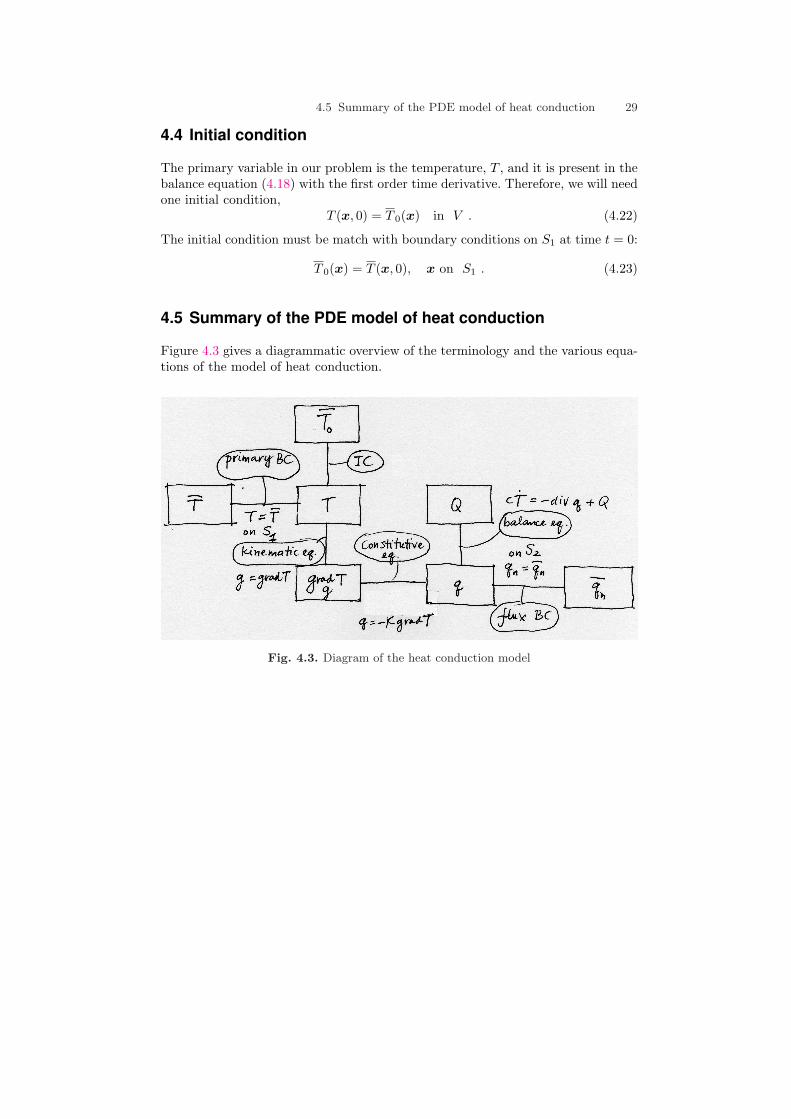
4.5 Summary of the PDE model of heat conduction
Figure 4.3 gives a diagrammatic overview of the terminology and the various equa-tions of the model of heat conduction.
Fig. 4.3. Diagram of the heat conduction model


5
Galerkin method for the model of heat conduction
5.1 Weighted residual formulation
The balance equation (4.18) defines the balance residual as
rB = cV∂T
∂t− div
[κ(gradT )T
]−Q . (5.1)
As explained in Chapter 2, the first step is to write the weighted residual equation∫
V
η(x)rB(x, t) dV . (5.2)
The first and the third term are kept as they are, but the second term remindsus of a similar term in equation (2.3): the test function η multiplies an expressionthat contains the second derivatives of temperature (the div
[κ(gradT )T
]term),
which was why Section 2.5 was needed. Balancing the order of differentiation byshifting one derivative from the temperature to the test function η will be beneficialhere too: similarly to Section 2.5, we will be able to satisfy the natural boundaryconditions without having to include them as a residual (naturally!). As before, theprice to pay is the need to place some restrictions on the test function.
Integration by parts was used in Section 2.5, and just a little bit more generaltool will work here too. For the moment, it will be convenient to work with theexpression
−η div[κ(gradT )T
]= η divq ,
that is, with the flux variable replacing κ(gradT )T .The integration by parts in the case of a multidimensional integral is generalized
in the divergence theorem (4.10). We may anticipate that η divq is the result of theLeibniz rule applied to the vector η q. That is indeed the case
div (η q) = η divq + (gradη) q (5.3)
which is easily verified in components.Therefore, we may start working on the integral
∫
V
η divq dV
where we substitute from (5.3)∫
V
η divq dV =∫
V
div (η q) dV −∫
V
(gradη) q dV (5.4)

32 5 Galerkin method for the model of heat conduction
The divergence theorem may be applied to the first integral on the right∫
V
η divq dV =∫
S
η q · n dS −∫
V
(gradη) q dV (5.5)
But q · n is known on parts of the boundary – see equations (4.20) and (4.21).Therefore, we may split the surface integral into one for each sub-surface,∫
V
η divq dV =∫
S1
η q ·n dS+∫
S2
η qn dS+∫
S3
η h(T−Ta) dS−∫
V
(gradη) q dV
(5.6)We see that the situation is analogous to the one discussed below equation (2.10):The integral over the part of the surface S1 is troublesome, because q ·n is unknownthere. However, we have the option of making η vanish along S1. In this way, weobtain
∫
V
η divq dV =∫
S2
η qn dS +∫
S3
η h(T − Ta) dS −∫
V
(gradη) q dV (5.7)
where η(x) = 0 for x ∈ S1.Expanding the weighted residual equation (5.2) yields
∫
V
η rB dV =∫
V
ηcV∂T
∂tdV +
∫
V
(gradη) κ(gradT )T dV −∫
V
ηQ dV
+∫
S2
η qn dS +∫
S3
η h(T − Ta) dS = 0, η(x) = 0 for x ∈ S1
(5.8)
5.2 Reducing the model dimension
In this Section we show how the original three-dimensional model can be reducedto just two active dimensions. For some structures we can make the observationthat the temperature does not vary along one coordinate direction, say along thez direction. Figure 5.1 shows a disk of thickness t. It is a slice of a structure ofan unchanging cross-section which is very along in the z direction compared tothe transverse dimensions (some authors call this “infinitely long”, evidently witha bagfull of grains of salt). If the temperature distribution does not depend onthe z direction, and if we can neglect what is happening near the end sections,the component of the temperature gradient along the z direction will be negligible,∂T/∂z = 0. This does not necessarily mean that the z component of the heat flux isalso zero: the partial derivatives ∂T/∂x, and ∂T/∂y multiply the first two columnsin row three of (4.14) to yield
qz = κzx∂T/∂x + κzy∂T/∂y .
However, for the two classes of materials (4.15) and (4.16) the two coefficients κzx
and κzy are identically zero, which means that if the temperature gradient ∂T/∂zis zero, the heat flux in that direction also vanishes.
Going back to the Figure 5.1: the heat flux through the cross sections is zero, andthe temperature through the thickness of the disk is uniform (i.e. the temperaturedoes not vary with z). The surface of the three-dimensional solid consists of thetwo cross sections, and of the cylindrical surfaces, the inner and the outer. The two

5.2 Reducing the model dimension 33
Fig. 5.1. Diagram of the heat conduction model
cylindrical surfaces may be associated with boundary condition of any type. Thetwo cross sections are associated with the boundary condition of zero heat flux,qn = 0 (type S2, equation (4.20))
n · q = ±qz = 0, on the cross sections . (5.9)
Since the temperature does not vary with z, the integrals (5.7) may be simplifiedby pre-integrating in the thickness direction. The volume integrals then result inintegrals over the cross-sectional area, Sc, (see Figure 5.2); provided qn and h areindependent of z, the surface integrals result in curve integrals over the contour ofthe cross-section, Cc.
t
∫
Sc
ηcV∂T
∂tdS + t
∫
Sc
(gradη) κ(gradT )T dS − t
∫
Sc
ηQ dS
+t
∫
Cc,2
η qn dC + t
∫
Cc,3
η h(T − Ta) dC = 0, η(x) = 0 for x ∈ Cc,1
(5.10)
Note that the thickness t will cancel, and consequently does not play a role atall. Nevertheless, equation (5.10) still applies to a fully three-dimensional body.Note that (5.10) does not refer to z, except in the term ∂./∂z. We know that thetemperature does not depend on z, and concerning the gradient of η: we simplyassume that η does not depend on z: η = η(x, y). The last assumption completesthe reduction of the problem to two dimensions: all the functions depend on x andy only.
Fig. 5.2. Diagram of the heat conduction model

34 5 Galerkin method for the model of heat conduction
5.3 Test and trial functions: basis functions on triangulations
It is time to talk about the test and trial function. They are both functions of x andy only, η = η(x, y) and T = T (x, y, t) (and for the trial function, time). The onlydifference between them is the value they assume on part of the boundary (part ofthe cross-section contour, for our two-dimensional disk) where the temperature isbeing prescribed, Cc,1:
T (x, t) = T (x, t), η(x) = 0 x on Cc,1 .
Let us consider first the test function. It needs to be defined as a function of xand y over arbitrarily shaped domains. The concept of piecewise linear functionsdefined over tilings of arbitrary domains into triangles is quite ancient (at least interms of the development of computational mechanics)1. The domain of the diskwith a hole (shown in Figure 5.2) is approximated as a collection of triangles (inother words, it is tiled with triangles, or triangulated), see Figure 5.3. The meshconsisting of triangles is typically called triangulation, even though sometimes anymesh is called that. The vertices of the triangulation are called nodes (comparewith Section 2.7), while the line segments connecting the nodes are called edges.Evidently, the triangles are the finite elements.
Fig. 5.3. Mesh of the disk domain
Interpolation on the triangle mesh will be treated as a linear combination of“tents”. Each individual tent is formed by grabbing one of the nodes (say J) andraising it out of the plane of the triangulation (traditionally to a unit height). Thetent canvas is stretched over the edges that connect at the node J , and are clampeddown by the ring of the edges that surround node J . The cartoon of one particularbasis function tent is shown in Figure 5.4. For those who do not like tents, the termhat function may be preferable.
All the triangles that are connected in the node J support the function NJ ,which is another way of saying that the function NJ is nonzero in these triangles;evidently, it is defined to be zero everywhere else. (If you are inside the “tent”, youare standing on the support of the function.)
1The so-called “linear triangle” made its first appearance in a lecture by Courantin 1943, applied to Poisson’s equation, which is a time-independent version of the heatconduction equation of this chapter. It was then picked up as a structural element inaerospace engineering to model Delta wing skin panels, as described in the 1956 paper byTurner, Clough, Martin and Topp. Clough then applied the triangle to problems in civilengineering, and he also coined the terminology “finite element”.

5.4 Basis functions on the standard triangle 35
Fig. 5.4. Visual representation of one basis function on the mesh of the disk
It remains to write down the equations that define the function NJ at any pointwithin its support. That means writing an expression for each triangle separately.As discussed in Section 2.8, the alternative viewpoint would rather express all thenonzero pieces of all the basis functions over a single triangle (element). Referring toFigure 5.4, there are only three such functions: the three basis functions associatedwith the nodes at the corners of the element; all the other basis functions in themesh are identically zero over this element. Thus, we stand before the task of writingdown the expressions for the three basis functions on a single triangle.
5.4 Basis functions on the standard triangle
Each of the three basis functions is zero along one edge of the triangle: again, referto Figure 5.4. The task is accomplished most readily when the triangle is in a specialposition with respect to the coordinates: the standard triangle; see Figure 5.5.The basis functions associated with nodes ©2 and ©3 are simply
N2(ξ, η) = ξ , (5.11)
andN3(ξ, η) = η . (5.12)
As is easily verified, N2 is zero along the edge ©1©3, and assumes value +1 at node©2; analogous properties hold for N3. If N1 should be equal to +1 at the origin, itmust be written as
N1(ξ, η) = 1− ξ − η . (5.13)
Clearly, N1 vanishes at the edge opposite node ©1. Thus, we see that the threefunctions we just formulated satisfy the Kronecker delta property, equation (2.19).As in Section 2.7 this means the degree of freedom at each node of the triangle isthe value of the interpolated function at the node.
In this way, we formulate interpolation over the standard triangle. One quantitythat we can interpolate on the standard triangle are the Cartesian coordinates.
x =3∑
i=1
Ni(ξ, η)xi , (5.14)
where the result of the interpolation is a point in the Cartesian coordinates
x =[
xy
],
and

36 5 Galerkin method for the model of heat conduction
Fig. 5.5. Standard triangle
xi =[
xi
yi
]i = 1, 2, 3 ,
are the coordinates of the three points that are being interpolated. Equation (5.14)is a mapping from the pair ξ, η to the point x, y. Substituting for the basis functions,it may be written explicitly as
[xy
]=
[(x2 − x1) (x3 − x1)(y2 − y1) (y3 − y1)
] [ξη
]+
[x1
y1
]. (5.15)
This matrix equation is accompanied by the picture in Figure 5.15. The two vectors,v and w, are the two columns of the square matrix in (5.15):
v =[
(x2 − x1)(y2 − y1)
],
and
w =[
(x3 − x1)(y3 − y1)
].
If both ξ and η vary between zero and one, equation (5.15) adds the two vectors,ξv and ηw to the vector [x1, y1]T , and the result then covers the entire parallel-ogram; on the other hand, if ξ and η are confined to the interior of the standardtriangle, equation (5.15) covers the area of the hatched triangle. To summarize,equation (5.15) is a map from the standard triangle to a triangle in the Cartesiancoordinates with corners in given locations.
Fig. 5.6. Interpolating Cartesian coordinates on the standard triangle
Inverting (5.15) to express ξ and η, which could then be substituted into (5.11)– (5.13) to produce basis functions in terms of x and y, looks appealing but should

5.5 Discretizing the weighted residual equation 37
be resisted. The reason is that numerical quadrature is available on the standardtriangle, but is much harder on general triangles. This will become especially clearwith quadratic elements later in the book.
However, since equation (5.15) is a invertible map from the standard triangleto a triangle in the Cartesian coordinates (invertibility follows if the triangle doesnot have its corners in a single straight-line: why?), we do get an approach toevaluating basis functions on a general triangle. Given a point x, y in the Cartesiancoordinates, and within the bounds of a triangle, we can use the inverse of themap (5.15) to obtain point ξ, η in the standard triangle (path 1 in Figure 5.7).Therefore, we may then evaluate Ni(ξ, η), which is the value Ni(x, y) (path 2 inFigure 5.7). That seems awkward, but normally we would want to evaluate the basisfunctions in order to perform numerical quadrature, that is at a particular point(quadrature point) within the triangle. In that case, ξ, η would be known (and x, ywould be unknown), and calculation of the function value is easy. Evaluation of thederivatives of the basis functions is a little bit more complex, and will be discussedlater in the section on numerical quadrature.
Fig. 5.7. Using the map from the standard triangle to evaluate basis functions over ageneral triangle
We understand now that each node in the mesh is associated with a single basisfunction. In the following, whenever we will write
Ni = Ni(x, y) ,
it has to be understood that within each triangle in the mesh, x = x(ξ, η), y =y(ξ, η), where ξ and η are coordinates on the standard triangle.
5.5 Discretizing the weighted residual equation
The trial function will be expressed using the basis functions as (compare withSection 2.7)
T (x, y, t) =N∑
i=1
Ni(x, y)Ti(t)
where the sum ranges over all the basis functions (i.e. over all the nodes in themesh). Included are also nodes on the boundary where the temperature is being

38 5 Galerkin method for the model of heat conduction
prescribed, Cc,12. These nodes are on the other hand excluded from the set of
possible test functions (which is expected to vanish along Cc,1), so that we willchoose
η(x, y) = Ni(x, y), i excluded when node i ∈ Cc,1
The nodes whose basis functions are not part of the linear combination for the testfunction are shown as empty circles in Figure 5.8.
To simplify, we shall adopt the following notation:
η(x, y) = Nj(x, y), ∀ free j,
where “free j” ranges over the nodes where the temperature is not being prescribed;and
T (x, y, t) =∑
all i
Ni(x, y)Ti(t)
where “all i” ranges over all the nodes, including those where the temperature isbeing prescribed.
As an aside, because the basis on the standard triangle satisfies the Kroneckerdelta property (2.19), the values of the degrees of freedom Ti(t) at the nodes“prescribed i” (the nodes with the empty circles in Figure 5.8) are simply thevalues of the interpolated prescribed temperature at the nodes, Ti(t) = T (xi, yi, t).
Fig. 5.8. Interpolating Cartesian coordinates on the standard triangle
The finite element expansions for the trial and test functions are now substi-tuted into the weighted residual integral (5.10), which upon the cancellation of thethickness t reads
∫
Sc
ηcV∂T
∂tdS +
∫
Sc
(gradη) κ(gradT )T dS −∫
Sc
ηQ dS
+t
∫
Cc,2
η qn dC +∫
Cc,3
η h(T − Ta) dC = 0, η(x) = 0 for x ∈ Cc,1 .(5.16)
For clarity, the substitution will be shown term-by-term (henceforth we will omitthe arguments):
∫
Sc
ηcV∂T
∂tdS =
∫
Sc
NjcV
∑
all i
Ni∂Ti
∂tdS , ∀ free j , (5.17)
2Apropos boundaries: Figure 5.8 clearly shows that with straight edges we are onlyapproximating any boundaries that are curved. Some error is involved, but fortunately weare able to control this error by reducing the length of the edges.

5.5 Discretizing the weighted residual equation 39
which simplifies to
∑
all i
[∫
Sc
NjcV Ni dS
]∂Ti
∂t, ∀ free j , (5.18)
The term in the bracket mixes together i and j from two different sets. However,some of the degrees of freedom ∂Ti/∂t are known. Therefore, separating the knownand unknown may be a good idea:
∑
all i
[∫
Sc
NjcV Ni dS
]∂Ti
∂t=
∑
free i
[∫
Sc
NjcV Ni dS
]∂Ti
∂t+
∑
prescribed i
[∫
Sc
NjcV Ni dS
]∂T i(t)
∂t, ∀ free j ,
(5.19)
The first integral on the right hand side of (5.19) suggests defining a matrix
Cji =∫
Sc
NjcV Ni dS , ∀ free j, i, (5.20)
the capacity matrix. The integral in the second term will be given a differentsymbol, since the meaning is different from the first (the latter is a load-like term)
Cji =∫
Sc
NjcV Ni dS , ∀ free j, ∀ prescribed i. (5.21)
Next, the second term in (5.16):∫
Sc
(gradη) κ(gradT )T dS =∫
Sc
(gradNj) κ(grad∑
all i
NiTi)T dS =
∑
free i
[∫
Sc
(gradNj) κ(gradNi)T dS
]Ti+
∑
prescribed i
[∫
Sc
(gradNj) κ(gradNi)T dS
]T i ∀ free j,
(5.22)
and the conductivity matrix may be defined
Kij =∫
Sc
(gradNj) κ(gradNi)T dS , ∀ free j, i, (5.23)
and the elements to go with the load-like term
Kij =∫
Sc
(gradNj) κ(gradNi)T dS , ∀ free j, ∀ prescribed i. (5.24)
Next, the load term corresponding to the internal heat generation:
LQ,j =∫
Sc
NjQ dS , ∀ free j, (5.25)
Finally, the terms corresponding to natural boundary conditions. On the Cc,2 partof the boundary, only a load term results.

40 5 Galerkin method for the model of heat conduction
Lq2,j = −∫
Cc,2
Nj qn dC (5.26)
On the other hand, on the Cc,3 part of the boundary, where the heat flux is pro-portional to the difference between the ambient temperature and the surface tem-perature, we get a load term
Lq3,j =∫
Cc,3
Nj hTa dC , ∀ free j, (5.27)
and a surface heat transfer matrix :
Hji =∫
Cc,3
Nj hNi dC , ∀ free j, i, (5.28)
To summarize, using the definitions of the various matrices and load terms,the system of ordinary differential equations that results from the finite elementdiscretization in space reads
∑
free i
Cji∂Ti
∂t+
∑
free i
KjiTi +∑
free i
HjiTi
+∑
prescribed i
Cji∂T i(t)
∂t+
∑
prescribed i
KjiT i − LQ,j − Lq2,j − Lq3,j = 0∀ free j,
(5.29)
5.6 Derivatives of the basis functions; Jacobian
The results of this section are much more general than may be expected. Whilewe derive the formulas from which the derivatives of basis functions may be calcu-lated for the linear triangles, the same implementation is used for all the so-calledisoparametric elements in the SOFEA toolbox.
To evaluate the conductivity matrix, we need to be able to calculate the deriva-tives of the basis functions with respect to x and y. Equations (5.11–5.13) definethe functions over the standard triangle in terms of ξ and η. Therefore, to express∂Ni/∂x we use the chain rule
∂Ni
∂x=
∂Ni
∂ξ
∂ξ
∂x+
∂Ni
∂η
∂η
∂x(5.30)
∂Ni
∂y=
∂Ni
∂ξ
∂ξ
∂y+
∂Ni
∂η
∂η
∂y(5.31)
For the purpose of this discussion, the function that is being differentiated does notreally matter. We will replace it with a ♥, while we arrange the above equation intoa matrix expression
[∂♥∂x
,∂♥∂y
]=
[∂♥∂ξ
,∂♥∂η
]
∂ξ
∂x
∂ξ
∂y
∂η
∂x
∂η
∂y
. (5.32)
The derivatives are arranged in row matrices is that these objects are gradients ofthe ♥ function [compare with (4.17)]. The matrix

5.6 Derivatives of the basis functions; Jacobian 41
[J]
=
∂ξ
∂x
∂ξ
∂y
∂η
∂x
∂η
∂y
, (5.33)
is the Jacobian matrix of the mapping ξ = ξ(x, y), η = η(x, y), which is theinverse of the map x = x(ξ, η), y = y(ξ, η) of equation (5.15). The question ishow to evaluate the partial derivatives of the type ∂ξ/∂x, since the inverse of themap (5.15) is not known (at least not in general). If we start the chain rule fromthe other end (switching the role of the variables), we obtain
[∂♥∂ξ
,∂♥∂η
]=
[∂♥∂x
,∂♥∂y
]
∂x
∂ξ
∂x
∂η
∂y
∂ξ
∂y
∂η
(5.34)
and inverting the Jacobian matrix in equation (5.32) we get[
∂♥∂ξ
,∂♥∂η
]=
[∂♥∂x
,∂♥∂y
] [J]−1
. (5.35)
Comparing (5.34) and (5.35) yields
[J ] =
∂x
∂ξ
∂x
∂η
∂y
∂ξ
∂y
∂η
=
[J]−1
, (5.36)
where [J ] is the Jacobian matrix of the map (5.15). The elements of [J ] aredirectly available from the matrix in (5.15). However, even more useful is to startfrom (5.14), and by definition the Jacobian matrix is then
[J ] =
3∑
i=1
∂Ni
∂ξxi ,
3∑
i=1
∂Ni
∂ηxi
3∑
i=1
∂Ni
∂ξyi ,
3∑
i=1
∂Ni
∂ηyi
, (5.37)
Note that the Jacobian matrix may be expressed as the product of two matrices:
[J ] = [x]T [Nder] , (5.38)
where [x] collects the coordinates of the nodes (three nodes, for the triangle)
[x] =
x1 , y1
x2 , y2
x3 , y3
, (5.39)
and [Nder] collects in each row the gradient of the basis function with respect tothe parametric coordinates
[Nder] =
∂N1
∂ξ,
∂N1
∂η
∂N2
∂ξ,
∂N2
∂η
∂N3
∂ξ,
∂N3
∂η
, (5.40)
42 5 Galerkin method for the model of heat conduction
The calculation of the spatial derivatives by an isoparametric geometric cell(recall that finite elements in SOFEA represent the calculation of basis functions andtheir derivatives in the gcell class) is a straightforward rewrite of the formulasabove. The method Ndermat spatial takes three arguments: a descendent of theclass gcell, and two arrays (5.40) and (5.39). The dimensions of the two arraysare (line 0013): nbfuns= number of basis functions, and dim= number of spacedimensions (= 2 for the triangle).
0013 function [Nspatialder,detJ] = Ndermat spatial3 (self, Nder, x)0014 [nbfuns,dim] = size(Nder);0015 if (size(Nder) ~= size(x))0016 error(’Wrong dimensions of arguments!’);0017 end
The Matlab code on line 0018 reflects literally the formula (5.38).
0018 J = x’ * Nder;% Compute the Jacobian matrix0019 detJ = det(J);% Compute the Jacobian
The Jacobian (determinant of the Jacobian matrix) should be positive. An error isreported when the Jacobian is non-positive; the generic case is treated in line 0023,which literally transcribes equation (5.32).
0020 if (detJ <= 0) % trouble0021 error(’Non-positive Jacobian’);0022 else % the generic case0023 Nspatialder = Nder * inv(J);0024 end0025 return;0026 end
Since the Jacobian is needed both to evaluate the derivatives of the basis functions,and to numerically integrate, it makes sense to compute it only once. Therefore,the method Ndermat spatial discussed in Section 5.6 returns both the array ofderivatives and the Jacobian.
To round off the discussion in this section, we need to present the code thatevaluates the basis functions (5.11–5.13) and the derivatives of the basis func-tions with respect to the parametric coordinates ξ, η. For the linear triangle (classgcell T3) the two methods are delightfully simple: method Nmat computes a col-umn array of basis function values, Nj in row j, given the parametric coordinatesξ ← param coords(1), η ← param coords(2).
0008 function val = Nmat4(self,param coords)0009 val = [(1 - param coords(1) - param coords(2));...0010 param coords(1); ...0011 param coords(2)];0012 return;0013 end
The method Nder param returns an array with three rows (one for each basis func-tion), with the gradient of the basis function j with respect to ξ, η in row j.
0010 function val = Nder param5(self, param coords)
3Folder: SOFEA/classes/gcell/@gcell4Folder: SOFEA/classes/gcell/@gcell_T35Folder: SOFEA/classes/gcell/@gcell_T3
5.7 Numerical integration 43
0011 val = [-1 -1; ...0012 +1 0; ...0013 0 +1];0014 return;0015 end
5.7 Numerical integration
Stepping closely along the lines of the discussion in Section 2.8, we formulate thenumerical integration procedure for the linear triangle. We begin by highlightingthe role of the Jacobian matrix.
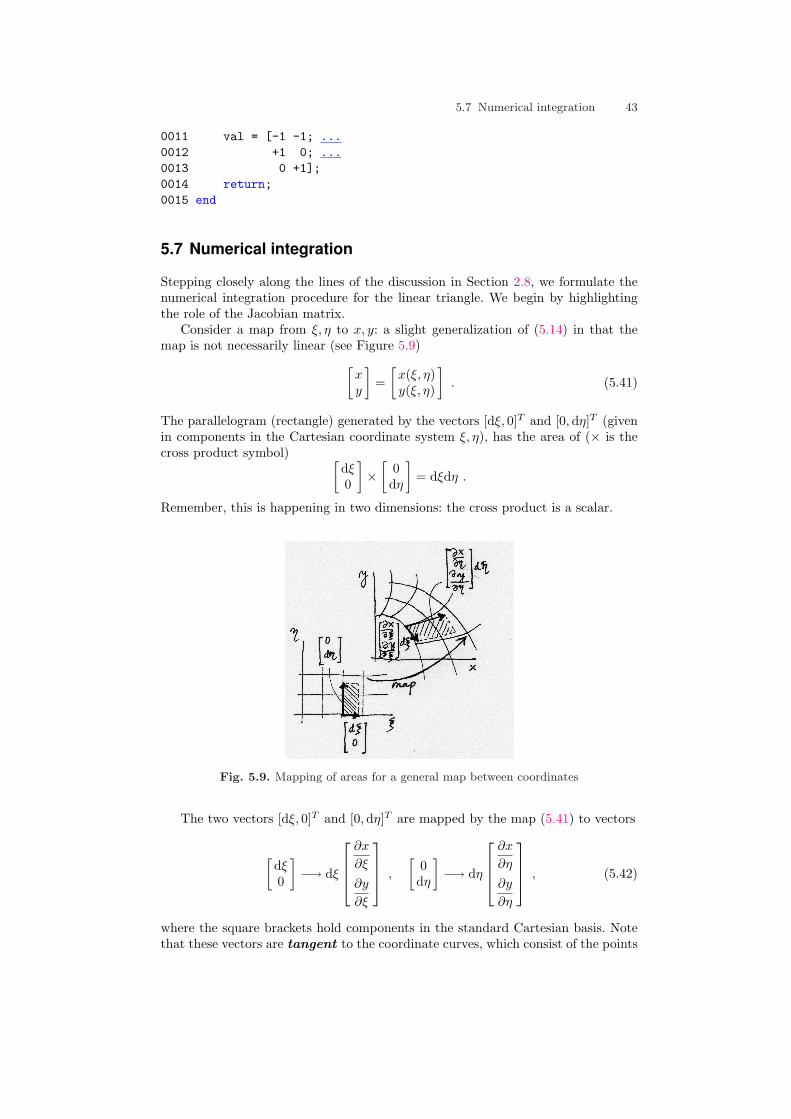
Consider a map from ξ, η to x, y: a slight generalization of (5.14) in that themap is not necessarily linear (see Figure 5.9)
[xy
]=
[x(ξ, η)y(ξ, η)
]. (5.41)
The parallelogram (rectangle) generated by the vectors [dξ, 0]T and [0, dη]T (givenin components in the Cartesian coordinate system ξ, η), has the area of (× is thecross product symbol) [
dξ0
]×
[0dη
]= dξdη .
Remember, this is happening in two dimensions: the cross product is a scalar.
Fig. 5.9. Mapping of areas for a general map between coordinates
The two vectors [dξ, 0]T and [0, dη]T are mapped by the map (5.41) to vectors
[dξ0
]−→ dξ
∂x
∂ξ
∂y
∂ξ
,
[0dη
]−→ dη
∂x
∂η
∂y
∂η
, (5.42)
where the square brackets hold components in the standard Cartesian basis. Notethat these vectors are tangent to the coordinate curves, which consist of the points

44 5 Galerkin method for the model of heat conduction
in the physical space x, y that are maps of the curves ξ = const and η = const. Thearea of the hatched parallelogram in Figure 5.9 is
dξ
∂x
∂ξ
∂y
∂ξ
× dη
∂x
∂η
∂y
∂η
= dξdη
∂x
∂ξ
∂y
∂ξ
×
∂x
∂η
∂y
∂η
. (5.43)
Compare this equation with (5.36): the two vectors in the cross product are thecolumns of the Jacobian matrix from (5.36). In fact, the cross product of thecolumns is the determinant of the Jacobian matrix (or, as the determinant is known,the Jacobian). Therefore, the map (5.41) maps areas as
dξdη −→ dξdη det [J ] . (5.44)
As a consequence of (5.44), we have the following change of coordinates inintegrals: ∫
S[x,y]
f(x, y)dxdy =∫
S[ξ,η]
f(ξ, η) det [J(ξ, η)] dξdη . (5.45)
Numerical quadrature rules take advantage of the relative ease with which theserules may be formulated on standard shapes, triangles, squares, cubes, etc. Thus,the integral on the left of (5.45) will be approximated as
∫
S[x,y]
f(x, y)dxdy ≈M∑
k=1
f(ξk, ηk) det [J(ξk, ηk)] Wk . (5.46)
We will introduce two integration rules for the standard triangle, one-point andthree-point quadrature, but many other rules are available: a number of authorshave compiled tables, see for instance Hughes’ book [Hug00]. The 1-point rule willbe able to integrate linear polynomials in ξ, η exactly, and the 3-point does thejob for up to quadratic polynomials in ξ, η. Table 5.1 gives the coordinates of theintegration points, and their weights.
Rule Coordinates ξj , ηj Weights Wj Integrates exactly
1-point 1/3, 1/3 1/2 linear polynomial
3-point2/3, 1/61/6, 2/31/6, 1/6
1/61/61/6
quadratic polynomial
Table 5.1. Numerical integration rules on the standard triangle
5.8 Conductivity matrix
As already discussed in Chapter 3, all the problem dependent code is concentrated ina descendent of the feblock class. In particular, the two-dimensional heat diffusionmodel of this chapter is implemented in the feblock diffusion finite elementblock class.
The conductivity and other matrices are computed by evaluating the contribu-tions from each element separately, storing these contributions element-by-element
5.8 Conductivity matrix 45
in a cell array, and then finally assembling all the element contributions into theoverall system matrix. Thus, the method conductivity returns the array ems ofelement matrix objects (class elemat), each of which represents the conductivitymatrix of a single element.
The method begins by retrieving some information from the parent class, suchas gcells (cell array of the geometric cells), integration rule, and the materialmat.
0009 function ems = conductivity6(self, geom, theta)0010 gcells = get(self.feblock,’gcells’);0011 ngcells = length(gcells);0012 nfens = get(gcells(1),’nfens’);0013 dim = get(geom,’dim’);0014 % Pre-allocate the element matrices0015 ems(1:ngcells) = deal(elemat);0016 % Integration rule0017 integration rule = get(self.feblock, ’integration rule’);0018 pc = get(integration rule, ’param coords’);0019 w = get(integration rule, ’weights’);0020 npts per gcell = get(integration rule, ’npts’);0021 % Material0022 mat = get(self.feblock, ’mater’);0023 kappa = get(mat,’conductivity’);
The loop over all the geometric cells starts with the retrieval of the connectivity (i.e.the numbers of the nodes which are connected together by the cell), and of the arrayof the node coordinates, x (compare with (5.39)). Then, the element conductivitymatrix Ke is initialized to zero, and the loop over all the quadrature points maybegin.
0024 % Now loop over all gcells in the block0025 for i=1:ngcells0026 conn = get(gcells(i), ’conn’); % connectivity0027 x = gather(geom,conn,’values’,’noreshape’);% node coord0028 Ke = zeros(nfens); % element matrix
The loop over the integration points starts with calculation of the gradients of thebasis functions with respect to the parametric coordinates, see array (5.40). Thencompute the spatial derivatives of the basis functions, Nspder, and the Jacobian,detJ.
0029 % Loop over all integration points0030 for j=1:npts per gcell0031 Nder = Ndermat param (gcells(i), pc(j,:));0032 [Nspder,detJ] = Ndermat spatial(gcells(i), Nder, x);
Often for orthotropic materials the axes of orthotropy vary from point-to-point.In that case it makes sense to describe the material properties in local Cartesiancoordinates, and then allow the finite element block to define a transformation ma-trix between the local coordinate directions and the global Cartesian basis: refer toFigure 5.10. The attribute of a material parameter is thus the material conductivityin the rotated basis, ex, ey
6Folder: SOFEA/classes/feblock/@feblock_diffusion
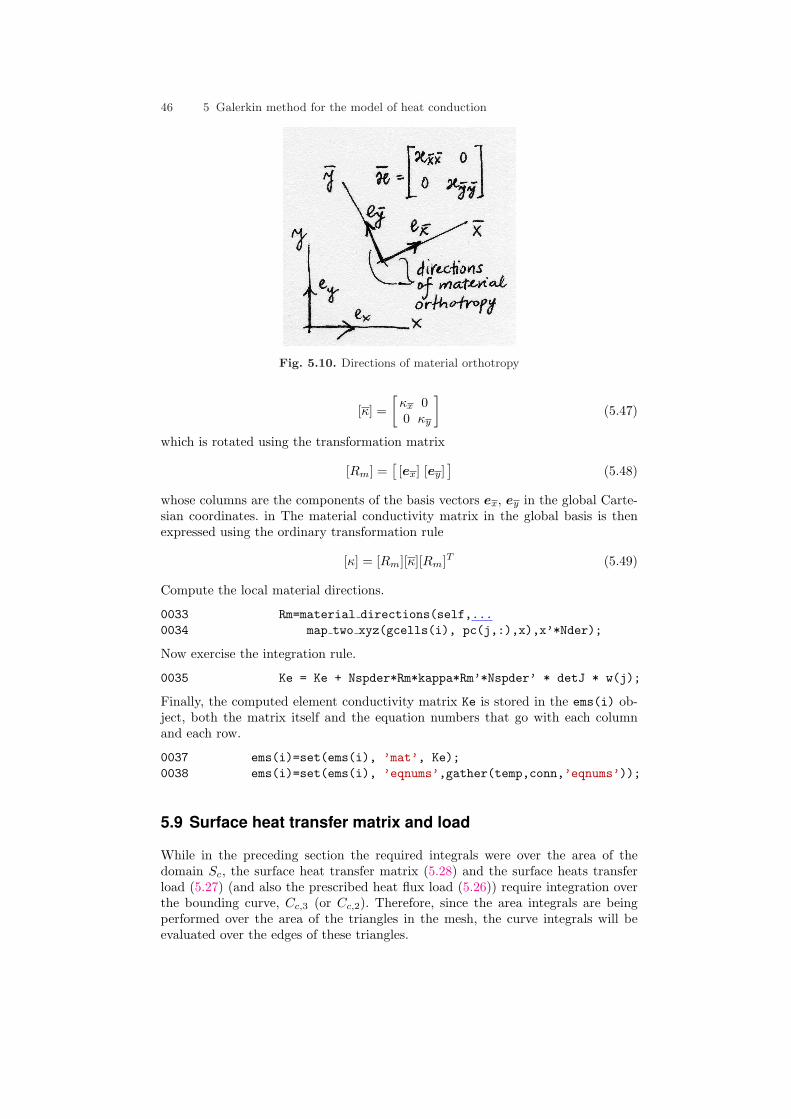
46 5 Galerkin method for the model of heat conduction
Fig. 5.10. Directions of material orthotropy
[κ] =[
κx 00 κy
](5.47)
which is rotated using the transformation matrix
[Rm] =[[ex] [ey]
](5.48)
whose columns are the components of the basis vectors ex, ey in the global Carte-sian coordinates. in The material conductivity matrix in the global basis is thenexpressed using the ordinary transformation rule
[κ] = [Rm][κ][Rm]T (5.49)
Compute the local material directions.
0033 Rm=material directions(self,...0034 map two xyz(gcells(i), pc(j,:),x),x’*Nder);
Now exercise the integration rule.
0035 Ke = Ke + Nspder*Rm*kappa*Rm’*Nspder’ * detJ * w(j);
Finally, the computed element conductivity matrix Ke is stored in the ems(i) ob-ject, both the matrix itself and the equation numbers that go with each columnand each row.
0037 ems(i)=set(ems(i), ’mat’, Ke);0038 ems(i)=set(ems(i), ’eqnums’,gather(temp,conn,’eqnums’));
5.9 Surface heat transfer matrix and load
While in the preceding section the required integrals were over the area of thedomain Sc, the surface heat transfer matrix (5.28) and the surface heats transferload (5.27) (and also the prescribed heat flux load (5.26)) require integration overthe bounding curve, Cc,3 (or Cc,2). Therefore, since the area integrals are beingperformed over the area of the triangles in the mesh, the curve integrals will beevaluated over the edges of these triangles.

5.9 Surface heat transfer matrix and load 47
Evaluating the basis functions (5.11–5.13) along the edges of the standard tri-angle, we may observe that the basis function associated with the opposite vertex isidentically zero, and the other two at the end-points of the edge vary linearly alongthe edge. In fact, completely in agreement with the basis functions (2.20) definedon the line element L2. Therefore, integrating an expression along the edge of thetriangle T3 that connects nodes i, j yields exactly the same result as integratingalong the line element L2 that connects nodes i, j. However, the two approachesare not the same thing: if, for the purpose of numerical integration, we use theelement L2, the design of the numerical integration code will be reusable: the samepiece of code may be used to integrate quantities along a curve which is tiled withfinite element edges with linear variation of basis functions – the triangle T3, thequadrilateral Q4, the hexahedron H8, the tetrahedron T4.
Fig. 5.11. Mapping of the standard interval to a Cartesian space
Let us take for instance equation (5.26). The goal is to evaluate an integral ofthe form ∫
C
f(p) dC (5.50)
where we will assume that the curve C may be “embedded” in a three-dimensional,two-dimensional, or one-dimensional Euclidean space (i.e. it may be a spatial curve,plane curve, or just an interval on the real line). Correspondingly, the point on thecurve p will have appropriate number of components. To perform the integral, theelementary length dC is needed.
The point p on the curve will be assumed to be the result of the mapping thestandard interval −1 ≤ ξ ≤ +1 (compare with the 1-D map (2.23), and refer toFigure 5.11, where the map is two-dimensional)
p = g(ξ) . (5.51)
For two closely spaced points on the curve, p(ξ) and p(ξ + ∆ξ), where ∆ξ is thedistance between the two points in the standard interval, the second point may beobtained from the first using the first two terms of the Taylor series as
p(ξ + ∆ξ) = p(ξ) +∂p(ξ + ε∆ξ)
∂ξ∆ξ 0 ≤ ε ≤ 1. (5.52)
The two points may be connected with a vector approximately tracking the curve(see Figure 5.12),

48 5 Galerkin method for the model of heat conduction
p(ξ + ∆ξ)− p(ξ) =∂p(ξ + ε∆ξ)
∂ξ∆ξ ,
whose length (squared) is
(∆C)2 =(
∂p(ξ + ε∆ξ)∂ξ
∆ξ
)·(
∂p(ξ + ε∆ξ)∂ξ
∆ξ
)=
∣∣∣∣∣∣∣∣∂p(ξ + ε∆ξ)
∂ξ
∣∣∣∣∣∣∣∣2
(∆ξ)2 .
Skipping over the details, we may conclude that for infinitesimally short intervals,∆ξ → dξ, the following relationship is obtained
dC =∣∣∣∣∣∣∣∣∂p(ξ)
∂ξ
∣∣∣∣∣∣∣∣ dξ , (5.53)
where ∂p(ξ)∂ξ is the vector tangent to the curve at ξ, and
∣∣∣∣∣∣∂p(ξ)
∂ξ
∣∣∣∣∣∣ is the Jacobian
to be used in the change-of-variables device for the curve integral.
Fig. 5.12. Length of a curve
Let us now specialize these developments to the L2 element: the map (5.54)reads
p = g(ξ) =2∑
i=1
Ni(ξ)xi . (5.54)
where Ni are given by (2.25). Therefore, the tangent vector (see (5.53)) reads
∂p(ξ)∂ξ
=x2 − x1
2
and the Jacobian is h/2, where h = ||x2 − x1|| is the length of the element.Of course, for general elements with n nodes, the implementation confused the
tangent as∂p(ξ)
∂ξ= x’*Nder ,
using the following two matrices ,
[x] =
x1 , y1
x2 , y2
..., ...xn , yn
, (5.55)
5.9 Surface heat transfer matrix and load 49
where the number of columns is equal to the number of spatial dimensions, 1, 2(which is assumed in (5.55)), or 3, and [Nder] collects in each row the gradient ofthe basis function with respect to the parametric coordinate
[Nder] =
∂N1
∂ξ
∂N2
∂ξ
...
∂Nn
∂ξ
, (5.56)
These matrices should be compared with those defined for the triangle T3, equa-tions (5.39) and (5.40). The only difference is the number of space dimensions, thenumber of basis functions, and the number of parametric dimensions; all of theseare taken account of by the Matlab code automatically.
The method surface transfer loads is a rewrite of the above formulas. Thesetup is straightforward and is omitted.
0009 function evs = surface transfer loads7 (self, geom, temp, amb)...
The main work is done in this loop: the interpolated values of the nodal ambienttemperatures are retrieved from the field amb, and He is computed as the heatsurface transfer matrix for the element. Note the calculation of the Jacobian: it isin evaluated from the matrix of tangent vectors x’*Nder.
0021 % surface transfer coefficient0022 h = self.surface transfer;0023 % Now loop over all gcells in the block0024 for i=1:ngcells0025 conn = get(gcells(i), ’conn’); % connectivity0026 pT = gather(amb, conn, ’prescribed values’);0027 if norm (pT) ~= 00028 x = gather(geom, conn, ’values’, ’noreshape’); % node coord0029 He = zeros(nfens); % element matrix0030 % Loop over all integration points0031 for j=1:npts per gcell0032 N = Nmat(gcells(i), pc(j,:));0033 Nder = Ndermat param (gcells(i), pc(j,:));0034 detJ = Jacobian(gcells(i),x’*Nder);0035 He = He + h*N*N’ * detJ * w(j);0036 end
And the load vector is calculated and stored to be returned from this method.
0037 evs(i) = set(evs(i), ’vec’, He*pT);0038 evs(i) = set(evs(i), ’eqnums’, ...0039 gather(temp, conn, ’eqnums’));
7Folder: SOFEA/classes/feblock/@feblock diffusion

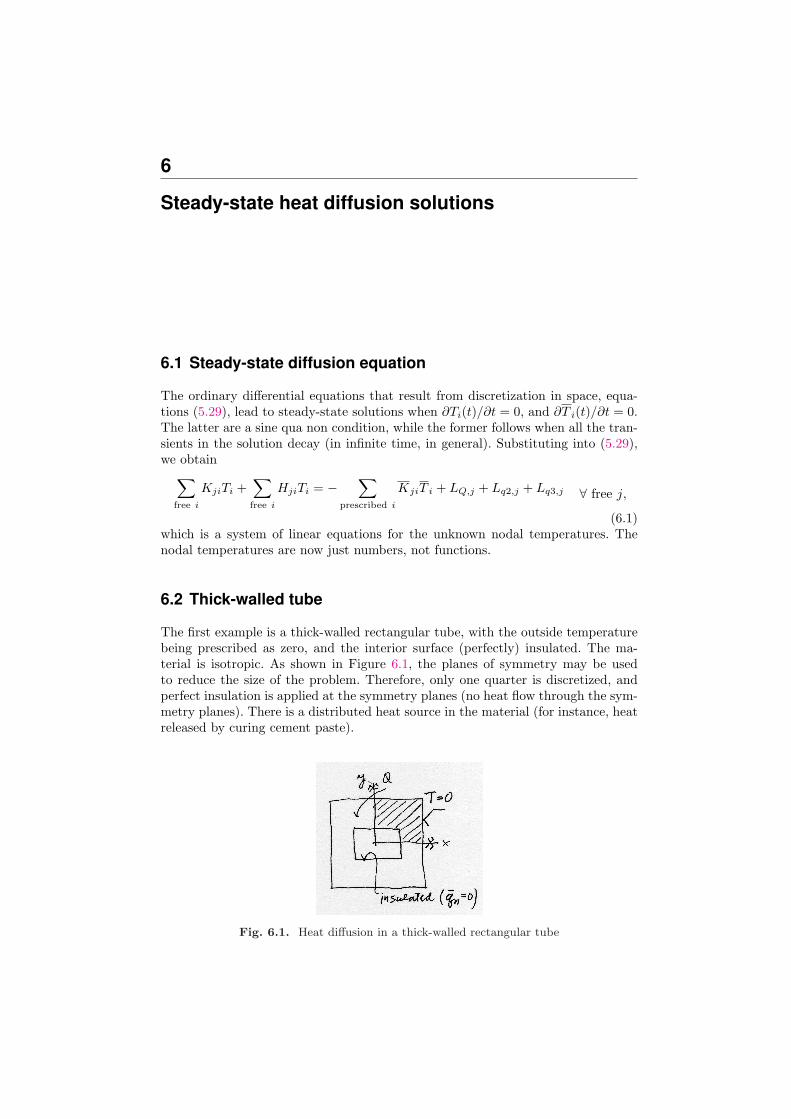
6
Steady-state heat diffusion solutions
6.1 Steady-state diffusion equation
The ordinary differential equations that result from discretization in space, equa-tions (5.29), lead to steady-state solutions when ∂Ti(t)/∂t = 0, and ∂T i(t)/∂t = 0.The latter are a sine qua non condition, while the former follows when all the tran-sients in the solution decay (in infinite time, in general). Substituting into (5.29),we obtain
∑
free i
KjiTi +∑
free i
HjiTi = −∑
prescribed i
KjiT i + LQ,j + Lq2,j + Lq3,j ∀ free j,
(6.1)which is a system of linear equations for the unknown nodal temperatures. Thenodal temperatures are now just numbers, not functions.
6.2 Thick-walled tube
The first example is a thick-walled rectangular tube, with the outside temperaturebeing prescribed as zero, and the interior surface (perfectly) insulated. The ma-terial is isotropic. As shown in Figure 6.1, the planes of symmetry may be usedto reduce the size of the problem. Therefore, only one quarter is discretized, andperfect insulation is applied at the symmetry planes (no heat flow through the sym-metry planes). There is a distributed heat source in the material (for instance, heatreleased by curing cement paste).
Fig. 6.1. Heat diffusion in a thick-walled rectangular tube

52 6 Steady-state heat diffusion solutions
The Matlab script is lshape11. The first few lines define some ancillary vari-ables, and then the two-dimensional mesh generator of triangle meshes is invoked.The generator is thoroughly described in the user’s guide targe2 users guide.pdf2,but we will describe a little bit the Matlab interface. The first argument is a cellarray, each element a string (character array), with one command for the meshgenerator. Thus, the first six strings define curves that bound the domain (straight-line segments), the line 0011 defines a subregion (chunk of area to be coveredwith triangles), and the last line defines the mesh size. The second argument totarge2 mesher is the thickness of the slab (of no interest here).
0001 kappa=[0.2 0; 0 0.2]; % conductivity matrix0002 Q=0.01100; % uniform heat source0003 num integ pts=1; % 1-point quadrature0004 [fens,gcells] = targe2 mesher({...textcolorcomment0005 [’curve 1 line 20 0 48 0’],...0006 [’curve 2 line 48 0 48 48’],...0007 [’curve 3 line 48 48 0 48’],...0008 [’curve 4 line 0 48 0 13’],...0009 [’curve 5 line 0 13 20 13’],...0010 [’curve 6 line 20 13 20 0’],...0011 ’subregion 1 property 1 boundary 1 2 3 4 5 6’,...0012 [’m-ctl-point constant 3.5’]0013 }, 1.0);
Next, the material object appropriate for heat diffusion is created, and supplied thematerial conductivity matrix κ, and the heat source Q. The finite element blockof class feblock diffusion is created, with attributes: the material, the array ofgeometric cells, and an integration rule (class tri rule is used for triangles).
0014 mater=mater diffusion (struct(’conductivity’,kappa,’source’,Q));0015 feb = feblock diffusion (struct (’mater’,mater,...0016 ’gcells’,gcells,...0017 ’integration rule’,tri rule(num integ pts)));
Two fields are created: geom represents the geometry (i.e. the locations of the nodes),and it is therefore initialized from the finite element node array, fens; and thetarepresents the temperatures at the nodes, and it is initially undefined, except forthe number of nodes nfens.
0018 geom = field(struct(’name’,[’geom’], ’dim’, 2, ’fens’,fens));0019 theta=field(struct(’name’,[’theta’], ’dim’, 1, ’nfens’,...0020 get(geom,’nfens’)));
The essential boundary conditions are next applied to the temperature field.The utility function fenode select is used to select nodes from the fens arraybased on their location: nodes which fall into given bounding boxes are selected([xlo xhi ylo yhi] =[48 48 0 48] and so on for the other box); to avoid problemswith precision, the boxes are for the purpose of the “in”-test inflated by 0.01. Thearray prescribed is filled with ones to indicate that all degrees of freedom areto be prescribed, the components to be prescribed are passed as an empty array(line 0026), which simply means all components are meant. The values to whichthe temperatures are being prescribed are all zeros. The data defining the essential
1Folder: SOFEA/examples/diffusion2Folder: SOFEA/meshes/targe2
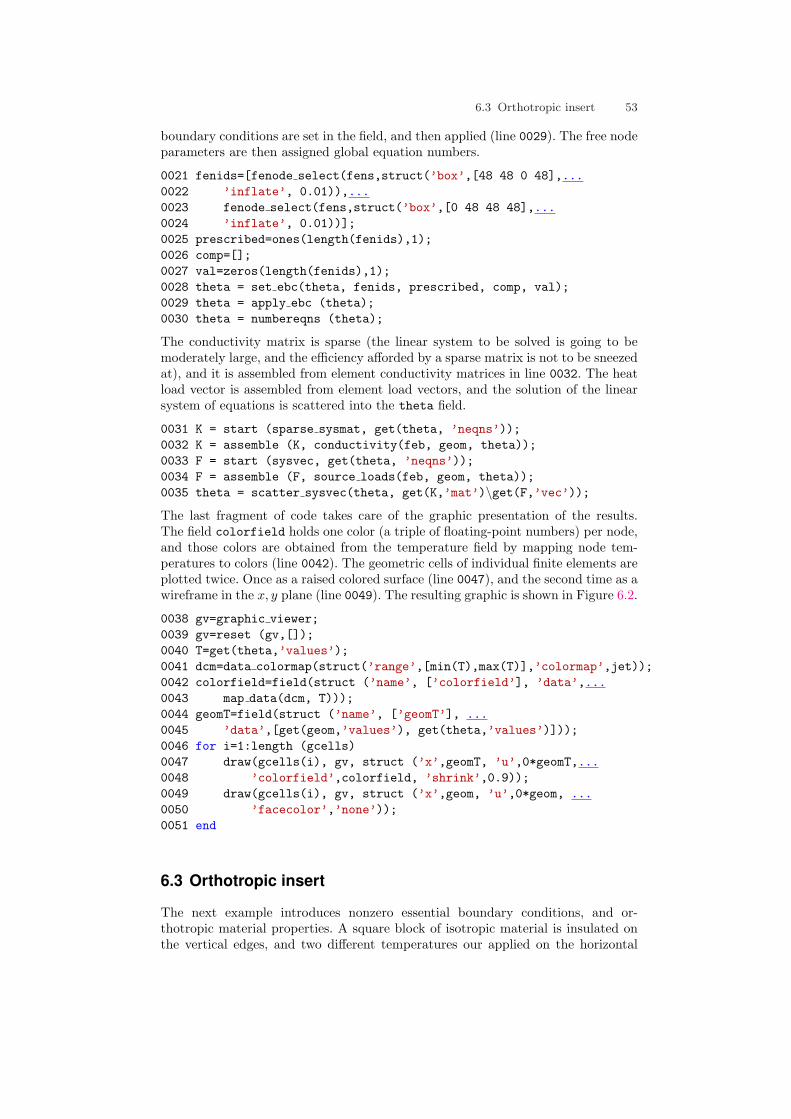
6.3 Orthotropic insert 53
boundary conditions are set in the field, and then applied (line 0029). The free nodeparameters are then assigned global equation numbers.
0021 fenids=[fenode select(fens,struct(’box’,[48 48 0 48],...0022 ’inflate’, 0.01)),...0023 fenode select(fens,struct(’box’,[0 48 48 48],...0024 ’inflate’, 0.01))];0025 prescribed=ones(length(fenids),1);0026 comp=[];0027 val=zeros(length(fenids),1);0028 theta = set ebc(theta, fenids, prescribed, comp, val);0029 theta = apply ebc (theta);0030 theta = numbereqns (theta);
The conductivity matrix is sparse (the linear system to be solved is going to bemoderately large, and the efficiency afforded by a sparse matrix is not to be sneezedat), and it is assembled from element conductivity matrices in line 0032. The heatload vector is assembled from element load vectors, and the solution of the linearsystem of equations is scattered into the theta field.
0031 K = start (sparse sysmat, get(theta, ’neqns’));0032 K = assemble (K, conductivity(feb, geom, theta));0033 F = start (sysvec, get(theta, ’neqns’));0034 F = assemble (F, source loads(feb, geom, theta));0035 theta = scatter sysvec(theta, get(K,’mat’)\get(F,’vec’));The last fragment of code takes care of the graphic presentation of the results.The field colorfield holds one color (a triple of floating-point numbers) per node,and those colors are obtained from the temperature field by mapping node tem-peratures to colors (line 0042). The geometric cells of individual finite elements areplotted twice. Once as a raised colored surface (line 0047), and the second time as awireframe in the x, y plane (line 0049). The resulting graphic is shown in Figure 6.2.
0038 gv=graphic viewer;0039 gv=reset (gv,[]);0040 T=get(theta,’values’);0041 dcm=data colormap(struct(’range’,[min(T),max(T)],’colormap’,jet));0042 colorfield=field(struct (’name’, [’colorfield’], ’data’,...0043 map data(dcm, T)));0044 geomT=field(struct (’name’, [’geomT’], ...0045 ’data’,[get(geom,’values’), get(theta,’values’)]));0046 for i=1:length (gcells)0047 draw(gcells(i), gv, struct (’x’,geomT, ’u’,0*geomT,...0048 ’colorfield’,colorfield, ’shrink’,0.9));0049 draw(gcells(i), gv, struct (’x’,geom, ’u’,0*geom, ...0050 ’facecolor’,’none’));0051 end
6.3 Orthotropic insert
The next example introduces nonzero essential boundary conditions, and or-thotropic material properties. A square block of isotropic material is insulated onthe vertical edges, and two different temperatures our applied on the horizontal
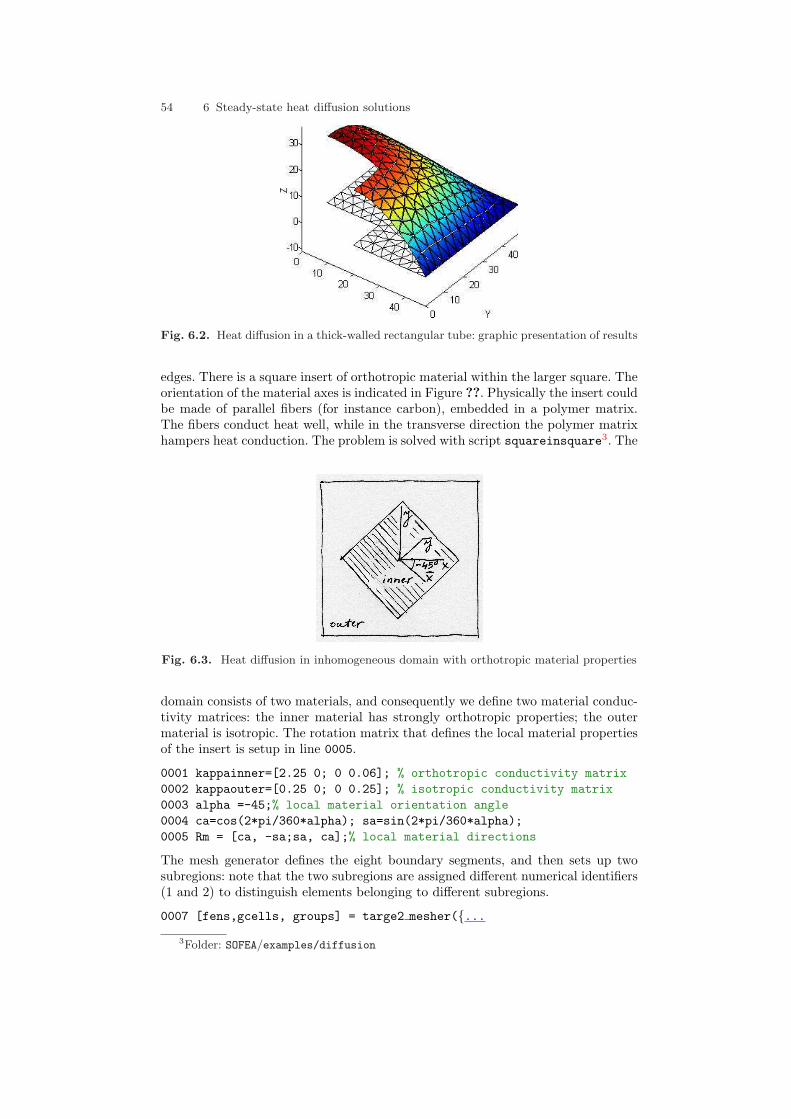
54 6 Steady-state heat diffusion solutions
Fig. 6.2. Heat diffusion in a thick-walled rectangular tube: graphic presentation of results
edges. There is a square insert of orthotropic material within the larger square. Theorientation of the material axes is indicated in Figure ??. Physically the insert couldbe made of parallel fibers (for instance carbon), embedded in a polymer matrix.The fibers conduct heat well, while in the transverse direction the polymer matrixhampers heat conduction. The problem is solved with script squareinsquare3. The
Fig. 6.3. Heat diffusion in inhomogeneous domain with orthotropic material properties
domain consists of two materials, and consequently we define two material conduc-tivity matrices: the inner material has strongly orthotropic properties; the outermaterial is isotropic. The rotation matrix that defines the local material propertiesof the insert is setup in line 0005.
0001 kappainner=[2.25 0; 0 0.06]; % orthotropic conductivity matrix0002 kappaouter=[0.25 0; 0 0.25]; % isotropic conductivity matrix0003 alpha =-45;% local material orientation angle0004 ca=cos(2*pi/360*alpha); sa=sin(2*pi/360*alpha);0005 Rm = [ca, -sa;sa, ca];% local material directions
The mesh generator defines the eight boundary segments, and then sets up twosubregions: note that the two subregions are assigned different numerical identifiers(1 and 2) to distinguish elements belonging to different subregions.
0007 [fens,gcells, groups] = targe2 mesher({...3Folder: SOFEA/examples/diffusion
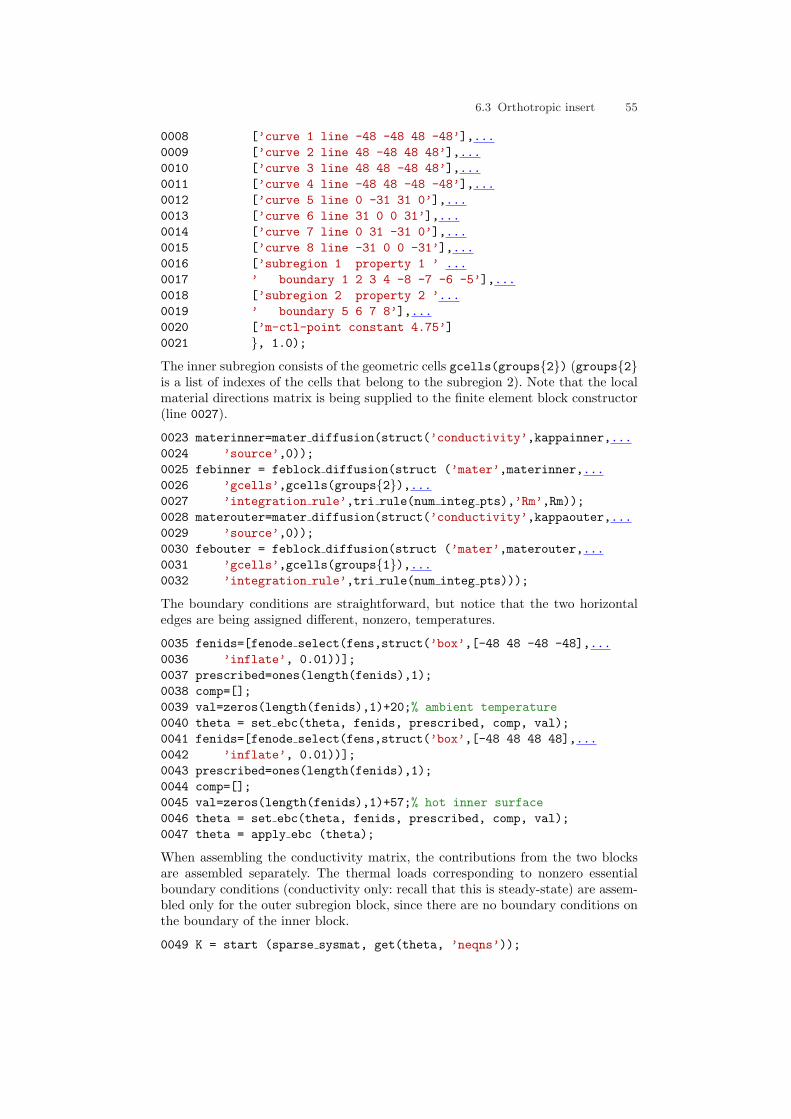
6.3 Orthotropic insert 55
0008 [’curve 1 line -48 -48 48 -48’],...0009 [’curve 2 line 48 -48 48 48’],...0010 [’curve 3 line 48 48 -48 48’],...0011 [’curve 4 line -48 48 -48 -48’],...0012 [’curve 5 line 0 -31 31 0’],...0013 [’curve 6 line 31 0 0 31’],...0014 [’curve 7 line 0 31 -31 0’],...0015 [’curve 8 line -31 0 0 -31’],...0016 [’subregion 1 property 1 ’ ...0017 ’ boundary 1 2 3 4 -8 -7 -6 -5’],...0018 [’subregion 2 property 2 ’...0019 ’ boundary 5 6 7 8’],...0020 [’m-ctl-point constant 4.75’]0021 }, 1.0);
The inner subregion consists of the geometric cells gcells(groups{2}) (groups{2}is a list of indexes of the cells that belong to the subregion 2). Note that the localmaterial directions matrix is being supplied to the finite element block constructor(line 0027).
0023 materinner=mater diffusion(struct(’conductivity’,kappainner,...0024 ’source’,0));0025 febinner = feblock diffusion(struct (’mater’,materinner,...0026 ’gcells’,gcells(groups{2}),...0027 ’integration rule’,tri rule(num integ pts),’Rm’,Rm));0028 materouter=mater diffusion(struct(’conductivity’,kappaouter,...0029 ’source’,0));0030 febouter = feblock diffusion(struct (’mater’,materouter,...0031 ’gcells’,gcells(groups{1}),...0032 ’integration rule’,tri rule(num integ pts)));
The boundary conditions are straightforward, but notice that the two horizontaledges are being assigned different, nonzero, temperatures.
0035 fenids=[fenode select(fens,struct(’box’,[-48 48 -48 -48],...0036 ’inflate’, 0.01))];0037 prescribed=ones(length(fenids),1);0038 comp=[];0039 val=zeros(length(fenids),1)+20;% ambient temperature0040 theta = set ebc(theta, fenids, prescribed, comp, val);0041 fenids=[fenode select(fens,struct(’box’,[-48 48 48 48],...0042 ’inflate’, 0.01))];0043 prescribed=ones(length(fenids),1);0044 comp=[];0045 val=zeros(length(fenids),1)+57;% hot inner surface0046 theta = set ebc(theta, fenids, prescribed, comp, val);0047 theta = apply ebc (theta);
When assembling the conductivity matrix, the contributions from the two blocksare assembled separately. The thermal loads corresponding to nonzero essentialboundary conditions (conductivity only: recall that this is steady-state) are assem-bled only for the outer subregion block, since there are no boundary conditions onthe boundary of the inner block.
0049 K = start (sparse sysmat, get(theta, ’neqns’));
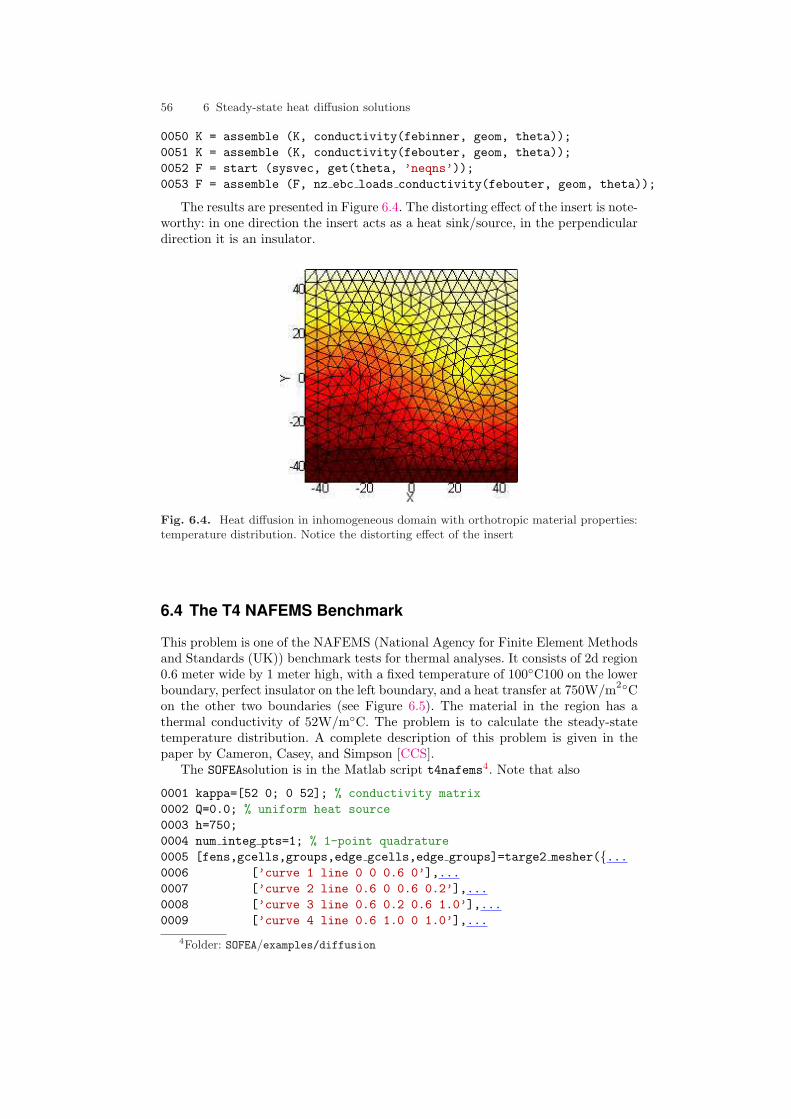
56 6 Steady-state heat diffusion solutions
0050 K = assemble (K, conductivity(febinner, geom, theta));0051 K = assemble (K, conductivity(febouter, geom, theta));0052 F = start (sysvec, get(theta, ’neqns’));0053 F = assemble (F, nz ebc loads conductivity(febouter, geom, theta));
The results are presented in Figure 6.4. The distorting effect of the insert is note-worthy: in one direction the insert acts as a heat sink/source, in the perpendiculardirection it is an insulator.
Fig. 6.4. Heat diffusion in inhomogeneous domain with orthotropic material properties:temperature distribution. Notice the distorting effect of the insert
6.4 The T4 NAFEMS Benchmark
This problem is one of the NAFEMS (National Agency for Finite Element Methodsand Standards (UK)) benchmark tests for thermal analyses. It consists of 2d region0.6 meter wide by 1 meter high, with a fixed temperature of 100◦C100 on the lowerboundary, perfect insulator on the left boundary, and a heat transfer at 750W/m2◦Con the other two boundaries (see Figure 6.5). The material in the region has athermal conductivity of 52W/m◦C. The problem is to calculate the steady-statetemperature distribution. A complete description of this problem is given in thepaper by Cameron, Casey, and Simpson [CCS].
The SOFEAsolution is in the Matlab script t4nafems4. Note that also
0001 kappa=[52 0; 0 52]; % conductivity matrix0002 Q=0.0; % uniform heat source0003 h=750;0004 num integ pts=1; % 1-point quadrature0005 [fens,gcells,groups,edge gcells,edge groups]=targe2 mesher({...0006 [’curve 1 line 0 0 0.6 0’],...0007 [’curve 2 line 0.6 0 0.6 0.2’],...0008 [’curve 3 line 0.6 0.2 0.6 1.0’],...0009 [’curve 4 line 0.6 1.0 0 1.0’],...
4Folder: SOFEA/examples/diffusion
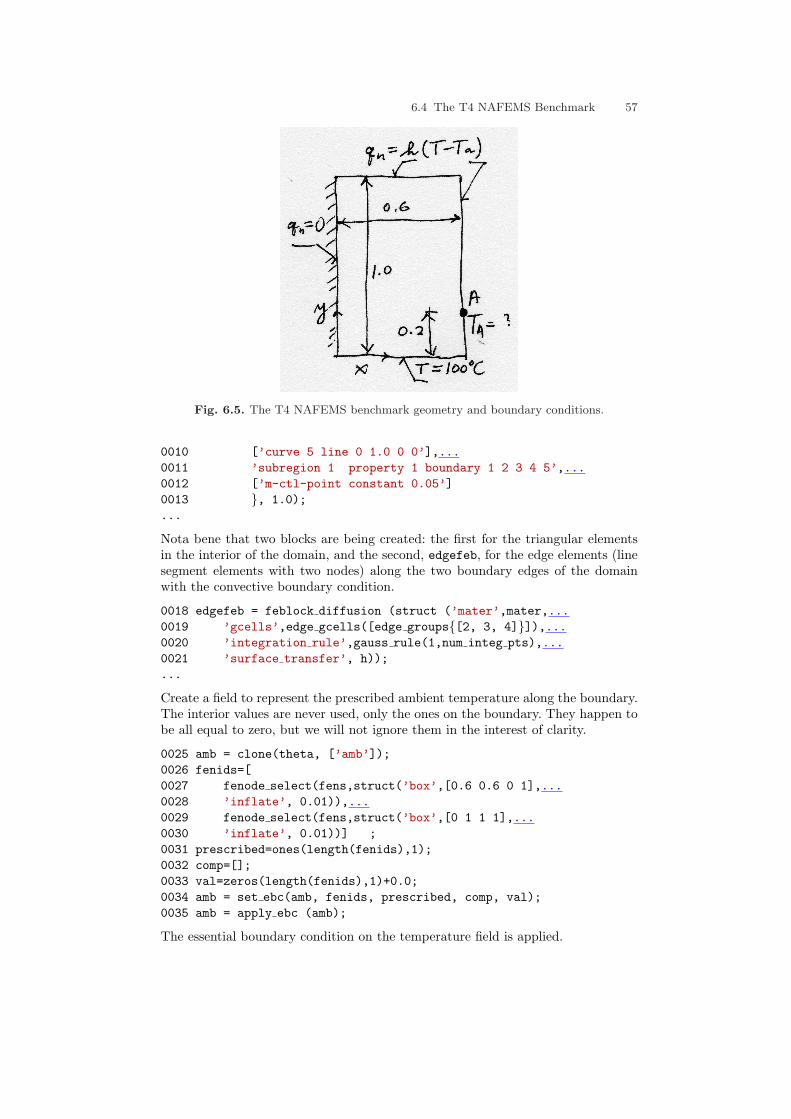
6.4 The T4 NAFEMS Benchmark 57
Fig. 6.5. The T4 NAFEMS benchmark geometry and boundary conditions.
0010 [’curve 5 line 0 1.0 0 0’],...0011 ’subregion 1 property 1 boundary 1 2 3 4 5’,...0012 [’m-ctl-point constant 0.05’]0013 }, 1.0);...
Nota bene that two blocks are being created: the first for the triangular elementsin the interior of the domain, and the second, edgefeb, for the edge elements (linesegment elements with two nodes) along the two boundary edges of the domainwith the convective boundary condition.
0018 edgefeb = feblock diffusion (struct (’mater’,mater,...0019 ’gcells’,edge gcells([edge groups{[2, 3, 4]}]),...0020 ’integration rule’,gauss rule(1,num integ pts),...0021 ’surface transfer’, h));...
Create a field to represent the prescribed ambient temperature along the boundary.The interior values are never used, only the ones on the boundary. They happen tobe all equal to zero, but we will not ignore them in the interest of clarity.
0025 amb = clone(theta, [’amb’]);0026 fenids=[0027 fenode select(fens,struct(’box’,[0.6 0.6 0 1],...0028 ’inflate’, 0.01)),...0029 fenode select(fens,struct(’box’,[0 1 1 1],...0030 ’inflate’, 0.01))] ;0031 prescribed=ones(length(fenids),1);0032 comp=[];0033 val=zeros(length(fenids),1)+0.0;0034 amb = set ebc(amb, fenids, prescribed, comp, val);0035 amb = apply ebc (amb);
The essential boundary condition on the temperature field is applied.
58 6 Steady-state heat diffusion solutions
0036 fenids=[0037 fenode select(fens,struct(’box’,[0. 0.6 0 0],...0038 ’inflate’, 0.01))] ;0039 prescribed=ones(length(fenids),1);0040 comp=[];0041 val=zeros(length(fenids),1)+100.0;0042 theta = set ebc(theta, fenids, prescribed, comp, val);0043 theta = apply ebc (theta);0044 theta = numbereqns (theta);
The system matrix and the system load vector are assembled, including the surfaceheats transfer contribution (line 0047), and the surface heat transfer load (line0051). Note that these are computed on the edge element block edgefeb. Thecontribution of the nonzero prescribed temperature is also added in.
0045 K = start (sparse sysmat, get(theta, ’neqns’));0046 K = assemble (K, conductivity(feb, geom, theta));0047 K = assemble (K, surface transfer(edgefeb, geom, theta));0048 F = start (sysvec, get(theta, ’neqns’));0049 F = assemble(F, source loads(feb, geom, theta));0050 F = assemble(F, nz ebc loads conductivity(feb, geom, theta));0051 F = assemble(F, surface transfer loads(edgefeb,geom,theta,amb));
After the solution, the temperature at the node x = 0.6, y = 0.2 (label A inFigure 6.6), is retrieved with gather and printed. The calculated value of 18.2481◦Cagrees well with the reference solution of 18.3◦C. The singularity near the cornerwhere the two kinds of boundary conditions meet (prescribed temperature withconvective surface heat transfer) is clearly visible.
0052 theta = scatter sysvec(theta, get(K,’mat’)\get(F,’vec’));0053 gather(theta,fenode select(fens,...0054 struct(’box’,[0.6 0.6 0.2 0.2],’inflate’, 0.01)),’values’)
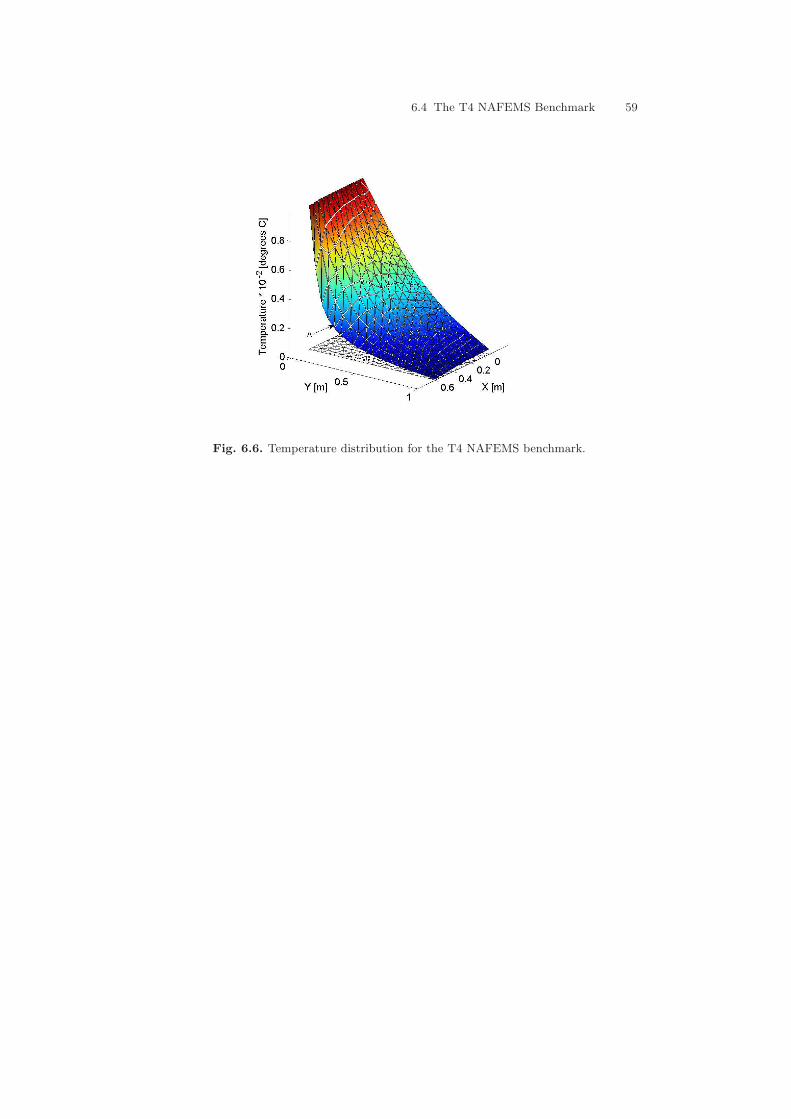
6.4 The T4 NAFEMS Benchmark 59
Fig. 6.6. Temperature distribution for the T4 NAFEMS benchmark.


7
Transient heat diffusion solutions
7.1 Discretization in time for transient heat diffusion
The ordinary differential equations (5.29) need to be numerically integrated in timeas analytical solutions are not possible in general. Hughes (2000) describes a finitedifference method, the generalized trapezoidal method , including its accuracyand stability properties (Chapter 8, Reference [Hug00]). To unclutter the equations,we will use a matrix notation, with the following definitions:
K = [Kji + Hji], free j, i, (7.1)
for the effective conductivity matrix, which bundles the bulk conductivity with thesurface heat transfer matrix,
K = [Kji], free j, prescribed i, (7.2)
for the rectangular conductivity matrix that relates the prescribed temperatures tothe heat fluxes,
C = [Cji], free j, i, (7.3)
for the capacity matrix,
C = [Cji], free j, prescribed i, (7.4)
for the rectangular capacity matrix that relates the prescribed temperature ratesto the heat fluxes, and
L = [LQ,j + Lq2,j + Lq3,j ], free j . (7.5)
The free temperatures and their rates are collected in column matrices
T = [Tj ], T =[∂Ti
∂t
], free j . (7.6)
and the prescribed temperatures and their rates
T = [T j ], T =[∂T i
∂t
], prescribed j . (7.7)
Therefore, equation (5.29) may be recast as
CT + KT + CT + KT −L = 0 . (7.8)

62 7 Transient heat diffusion solutions
The generalized trapezoidal method proposes to express the relationship betweenthe temperatures and the rates of temperatures at two different time instants, tnand tn+1, as
θT n+1 + (1− θ)T n =T n+1 − T n
∆t, (7.9)
where a quantity expressed at time tn is given a subscript n, and ∆t = tn+1 − tn.The free parameter θ is used to control accuracy and stability of the scheme.
Equation (7.9) is applied to the time stepping of (7.8) by writing (7.8) at the twotime instants, tn and tn+1, and then mixing together these two equations. Thus,we add together
θ[CT n+1 + KT n+1 + CT n+1 + KT n+1 −Ln+1
]= 0 , (7.10)
and(1− θ)
[CT n + KT n + CT n + KT n −Ln
]= 0 , (7.11)
and if we assume that equation (7.9) applies not only to the free temperatures, butalso to the prescribed temperatures, the mixture of rates (left-hand side of (7.9))may be replaced with the difference of the temperatures (right hand side of (7.9)).The resulting equation refers only to temperatures at two times, and may be solvedto yield T n+1, provided T n is known.
[1
∆tC + θK
]T n+1 =
[1
∆tC − (1− θ)K
]T n + θLn+1 + (1− θ)Ln
−[
1∆t
C + θK
]T n+1 +
[1
∆tC − (1− θ)K
]T n
(7.12)
The form of equation (7.12) is pleasingly symmetric, fully reflective of the blockednature of these equations. However, for implementation the following form is goingto be more profitable:
[1
∆tC + θK
]T n+1 =
[1
∆tC − (1− θ)K
]T n + θLn+1 + (1− θ)Ln
−CT n+1 − T n
∆t−K
[θT n+1 + (1− θ)T n
] (7.13)
The last line in this equation indicates how the contributions from prescribed tem-peratures (and hence also prescribed temperature rates) may be calculated: theterm
−CT n+1 − T n
∆t
introduces the contributions of the temperature rates, since the fraction on the rightis an approximation of the temperature rate, and the term
−K[θT n+1 + (1− θ)T n
]
contributes the effect of prescribed temperatures (in the form of a mixture of tem-peratures at time n and n + 1).
Now to the question of how to choose the value of θ: upon closer inspection ofequation (7.9) we may conclude that the two choices, θ = 0 and θ = 1, will lead toEuler methods – the forward (explicit) Euler for the former, and the backward(implicit) Euler for the latter. The value of θ = 1/2 is known as the Crank-Nicholson method. The explicit Euler method has the limitation of conditional
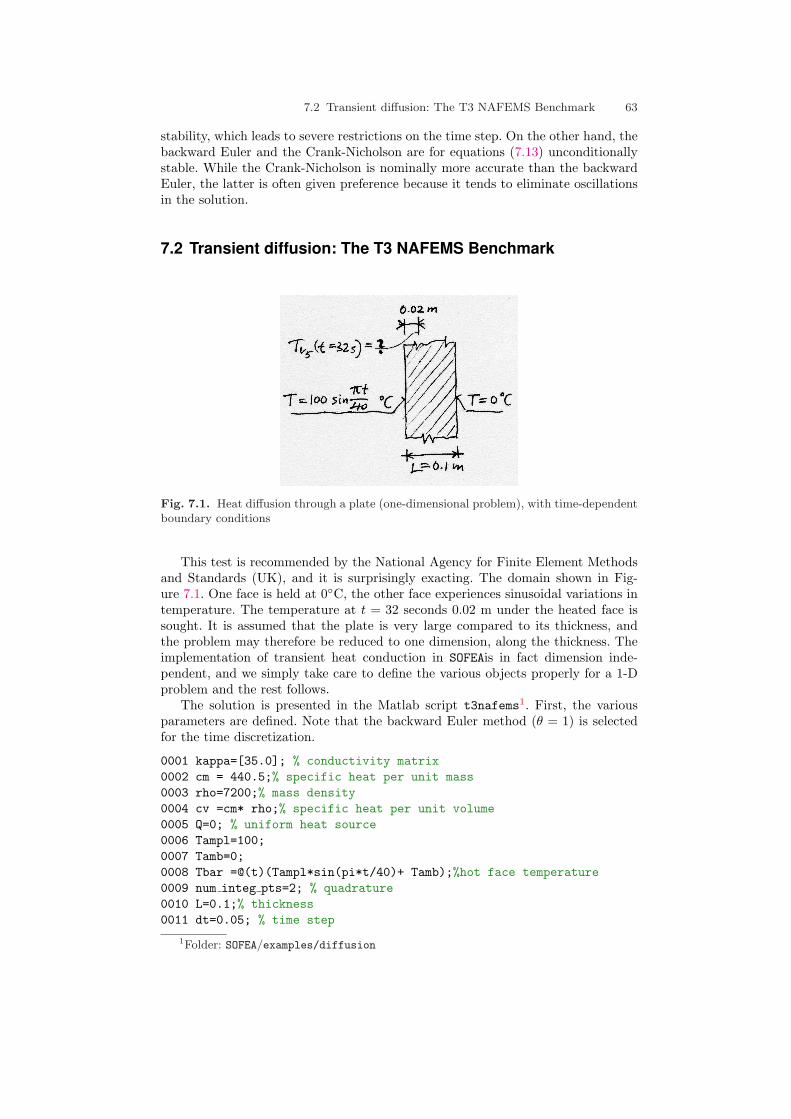
7.2 Transient diffusion: The T3 NAFEMS Benchmark 63
stability, which leads to severe restrictions on the time step. On the other hand, thebackward Euler and the Crank-Nicholson are for equations (7.13) unconditionallystable. While the Crank-Nicholson is nominally more accurate than the backwardEuler, the latter is often given preference because it tends to eliminate oscillationsin the solution.
7.2 Transient diffusion: The T3 NAFEMS Benchmark
Fig. 7.1. Heat diffusion through a plate (one-dimensional problem), with time-dependentboundary conditions
This test is recommended by the National Agency for Finite Element Methodsand Standards (UK), and it is surprisingly exacting. The domain shown in Fig-ure 7.1. One face is held at 0◦C, the other face experiences sinusoidal variations intemperature. The temperature at t = 32 seconds 0.02 m under the heated face issought. It is assumed that the plate is very large compared to its thickness, andthe problem may therefore be reduced to one dimension, along the thickness. Theimplementation of transient heat conduction in SOFEAis in fact dimension inde-pendent, and we simply take care to define the various objects properly for a 1-Dproblem and the rest follows.
The solution is presented in the Matlab script t3nafems1. First, the variousparameters are defined. Note that the backward Euler method (θ = 1) is selectedfor the time discretization.
0001 kappa=[35.0]; % conductivity matrix0002 cm = 440.5;% specific heat per unit mass0003 rho=7200;% mass density0004 cv =cm* rho;% specific heat per unit volume0005 Q=0; % uniform heat source0006 Tampl=100;0007 Tamb=0;0008 Tbar =@(t)(Tampl*sin(pi*t/40)+ Tamb);%hot face temperature0009 num integ pts=2; % quadrature0010 L=0.1;% thickness0011 dt=0.05; % time step
1Folder: SOFEA/examples/diffusion
64 7 Transient heat diffusion solutions
0012 tend= 32; % length of the time interval0013 t=0;0014 theta = 1.0; % generalized trapezoidal method0015 online graphics= ~true;% plot the solution as it is computed?0016 n=100*5;% needs to be multiple of five
The mesh is created by block1d2, a simple utility which produces a uniformlyspaced mesh on the interval 0 ≤ x ≤ L. Note that not only the essential boundaryconditions are applied to the temperature field, but also the initial condition (whichhappens to be 0◦C).
0017 [fens,gcells] = block1d(L,n,1.0); % Mesh0018 mater = mater diffusion(struct(’conductivity’,kappa,...0019 ’specific heat’,cv,’rho’,rho,’source’,Q));0020 feb = feblock diffusion (struct (...0021 ’mater’,mater,...0022 ’gcells’,gcells,...0023 ’integration rule’,gauss rule(1,num integ pts)));0024 geom = field(struct (’name’,[’geom’], ’dim’, 1, ’fens’,fens));0025 tempn = field(struct (’name’,[’temp’], ’dim’, 1,...0026 ’nfens’,get(geom,’nfens’)));0027 tempn = set ebc(tempn, 1, 1, 1, Tbar(t));0028 tempn = set ebc(tempn, n+1, 1, 1, Tamb);0029 tempn = apply ebc (tempn);0030 tempn = numbereqns (tempn);0031 tempn = scatter sysvec(tempn,gather sysvec(tempn)*0+Tamb);
The conductivity and capacity matrix are time independent; we compute themonce, and henceforth work only with the arrays Km and Cm.
0032 K = start (dense sysmat, get(tempn, ’neqns’));0033 K = assemble (K, conductivity(feb, geom, tempn));0034 Km = get(K,’mat’);0035 C = start (dense sysmat, get(tempn, ’neqns’));0036 C = assemble (C, capacity(feb, geom, tempn));0037 Cm = get(C,’mat’);
The time stepping begins. First, the temperature boundary conditions are time-dependent, which means they have to be set for each pass through the time loop(i.e. for each time instant).
0038 Tfifth = [];0039 while t<tend+0.1*dt % Time stepping...0046 tempn1 = tempn;0047 tempn1 = set ebc(tempn1, 1, 1, 1, Tbar(t+dt));0048 tempn1 = set ebc(tempn1, n+1, 1, 1, Tamb);0049 tempn1 = apply ebc (tempn1);
The thermal loads corresponding to nonzero temperatures and temperature ratesare applied next. We may compare the fields that are being passed on lines 0052and 0054 with (7.13) and the discussion below that equation: The Matlab code is aliteral transcription of the formulas. Note that we are directly working with objectsof the class field, using operator overload (adding and multiplying fields).
2Folder: SOFEA/meshes
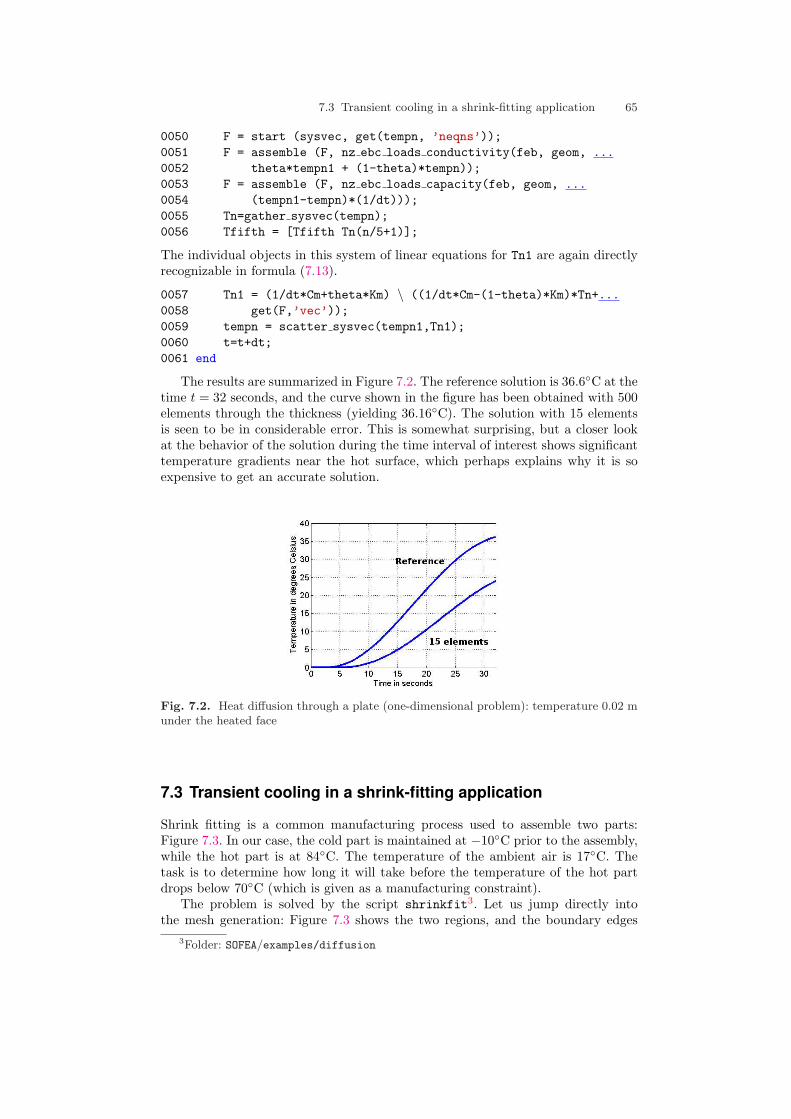
7.3 Transient cooling in a shrink-fitting application 65
0050 F = start (sysvec, get(tempn, ’neqns’));0051 F = assemble (F, nz ebc loads conductivity(feb, geom, ...0052 theta*tempn1 + (1-theta)*tempn));0053 F = assemble (F, nz ebc loads capacity(feb, geom, ...0054 (tempn1-tempn)*(1/dt)));0055 Tn=gather sysvec(tempn);0056 Tfifth = [Tfifth Tn(n/5+1)];
The individual objects in this system of linear equations for Tn1 are again directlyrecognizable in formula (7.13).
0057 Tn1 = (1/dt*Cm+theta*Km) \ ((1/dt*Cm-(1-theta)*Km)*Tn+...0058 get(F,’vec’));0059 tempn = scatter sysvec(tempn1,Tn1);0060 t=t+dt;0061 end
The results are summarized in Figure 7.2. The reference solution is 36.6◦C at thetime t = 32 seconds, and the curve shown in the figure has been obtained with 500elements through the thickness (yielding 36.16◦C). The solution with 15 elementsis seen to be in considerable error. This is somewhat surprising, but a closer lookat the behavior of the solution during the time interval of interest shows significanttemperature gradients near the hot surface, which perhaps explains why it is soexpensive to get an accurate solution.
Fig. 7.2. Heat diffusion through a plate (one-dimensional problem): temperature 0.02 munder the heated face
7.3 Transient cooling in a shrink-fitting application
Shrink fitting is a common manufacturing process used to assemble two parts:Figure 7.3. In our case, the cold part is maintained at −10◦C prior to the assembly,while the hot part is at 84◦C. The temperature of the ambient air is 17◦C. Thetask is to determine how long it will take before the temperature of the hot partdrops below 70◦C (which is given as a manufacturing constraint).
The problem is solved by the script shrinkfit3. Let us jump directly intothe mesh generation: Figure 7.3 shows the two regions, and the boundary edges
3Folder: SOFEA/examples/diffusion
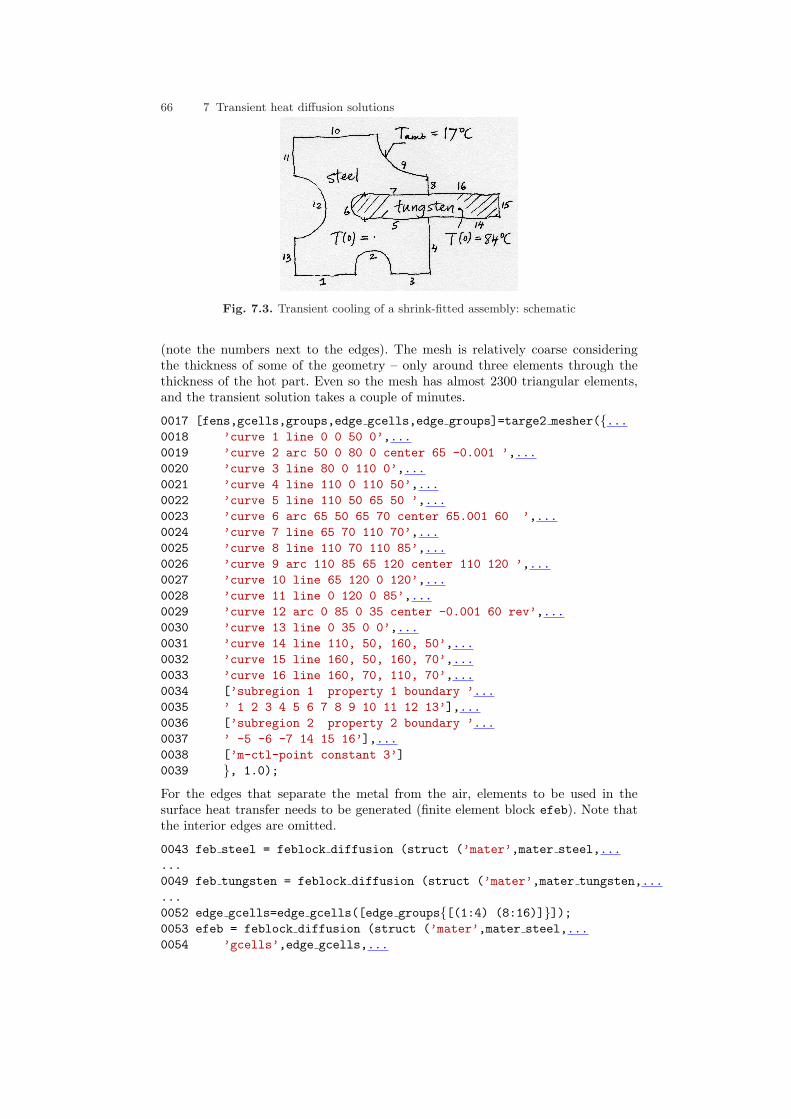
66 7 Transient heat diffusion solutions
Fig. 7.3. Transient cooling of a shrink-fitted assembly: schematic
(note the numbers next to the edges). The mesh is relatively coarse consideringthe thickness of some of the geometry – only around three elements through thethickness of the hot part. Even so the mesh has almost 2300 triangular elements,and the transient solution takes a couple of minutes.
0017 [fens,gcells,groups,edge gcells,edge groups]=targe2 mesher({...0018 ’curve 1 line 0 0 50 0’,...0019 ’curve 2 arc 50 0 80 0 center 65 -0.001 ’,...0020 ’curve 3 line 80 0 110 0’,...0021 ’curve 4 line 110 0 110 50’,...0022 ’curve 5 line 110 50 65 50 ’,...0023 ’curve 6 arc 65 50 65 70 center 65.001 60 ’,...0024 ’curve 7 line 65 70 110 70’,...0025 ’curve 8 line 110 70 110 85’,...0026 ’curve 9 arc 110 85 65 120 center 110 120 ’,...0027 ’curve 10 line 65 120 0 120’,...0028 ’curve 11 line 0 120 0 85’,...0029 ’curve 12 arc 0 85 0 35 center -0.001 60 rev’,...0030 ’curve 13 line 0 35 0 0’,...0031 ’curve 14 line 110, 50, 160, 50’,...0032 ’curve 15 line 160, 50, 160, 70’,...0033 ’curve 16 line 160, 70, 110, 70’,...0034 [’subregion 1 property 1 boundary ’...0035 ’ 1 2 3 4 5 6 7 8 9 10 11 12 13’],...0036 [’subregion 2 property 2 boundary ’...0037 ’ -5 -6 -7 14 15 16’],...0038 [’m-ctl-point constant 3’]0039 }, 1.0);
For the edges that separate the metal from the air, elements to be used in thesurface heat transfer needs to be generated (finite element block efeb). Note thatthe interior edges are omitted.
0043 feb steel = feblock diffusion (struct (’mater’,mater steel,......0049 feb tungsten = feblock diffusion (struct (’mater’,mater tungsten,......0052 edge gcells=edge gcells([edge groups{[(1:4) (8:16)]}]);0053 efeb = feblock diffusion (struct (’mater’,mater steel,...0054 ’gcells’,edge gcells,...
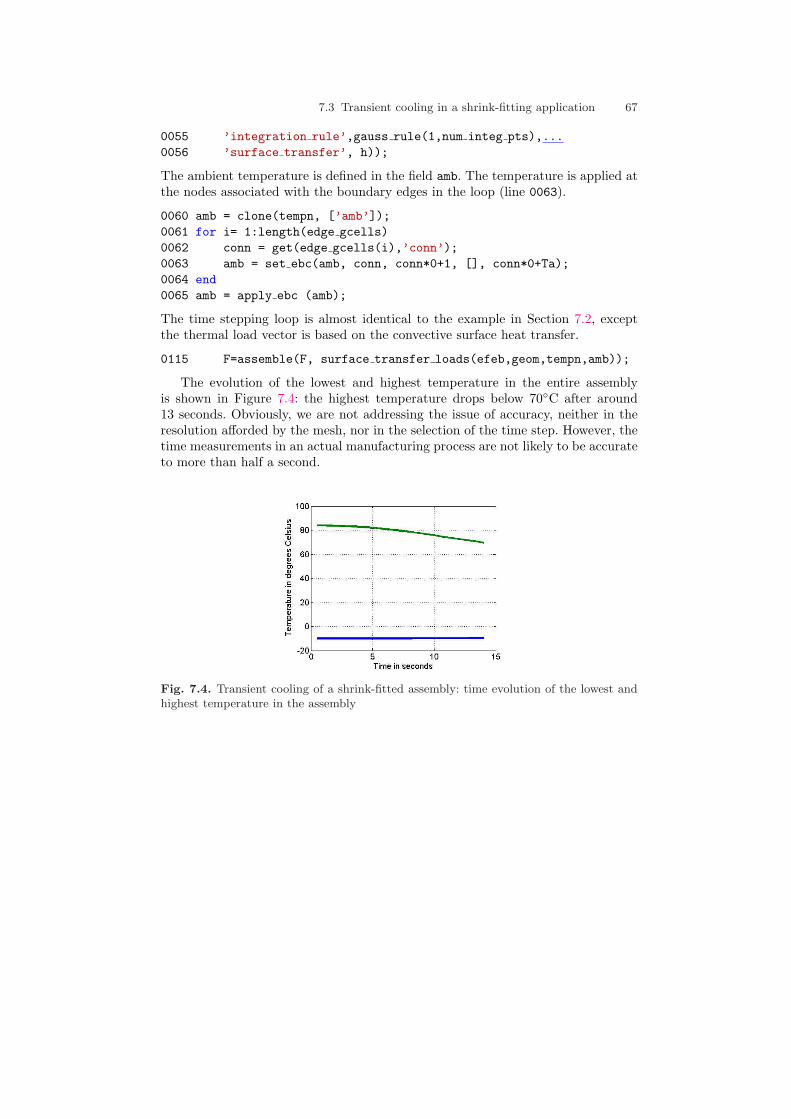
7.3 Transient cooling in a shrink-fitting application 67
0055 ’integration rule’,gauss rule(1,num integ pts),...0056 ’surface transfer’, h));
The ambient temperature is defined in the field amb. The temperature is applied atthe nodes associated with the boundary edges in the loop (line 0063).
0060 amb = clone(tempn, [’amb’]);0061 for i= 1:length(edge gcells)0062 conn = get(edge gcells(i),’conn’);0063 amb = set ebc(amb, conn, conn*0+1, [], conn*0+Ta);0064 end0065 amb = apply ebc (amb);
The time stepping loop is almost identical to the example in Section 7.2, exceptthe thermal load vector is based on the convective surface heat transfer.
0115 F=assemble(F, surface transfer loads(efeb,geom,tempn,amb));
The evolution of the lowest and highest temperature in the entire assemblyis shown in Figure 7.4: the highest temperature drops below 70◦C after around13 seconds. Obviously, we are not addressing the issue of accuracy, neither in theresolution afforded by the mesh, nor in the selection of the time step. However, thetime measurements in an actual manufacturing process are not likely to be accurateto more than half a second.
Fig. 7.4. Transient cooling of a shrink-fitted assembly: time evolution of the lowest andhighest temperature in the assembly

8
Expanding the library of element types
The linear triangle T3 is not particularly accurate, but for the linear heat diffusionproblem it is quite adequate. Nevertheless, we will introduce another couple of el-ements to expand the scope of the approximation methods discussed so far. Thisis desirable from a couple of different viewpoints. Firstly, with the linear trianglewe have been able to construct basis functions which allow for linear variations intemperature to be represented exactly. Hence, if the exact solution is a constantgradient of temperature, the approximate solution does not involve any discretiza-tion error. Unfortunately, the usefulness of this is limited, since constant gradientsof temperature are not commonly encountered in applications. If the basis func-tions can represent higher-order polynomials, for instance quadratic, the resultingmethod will be able to represent more complex gradients of temperature: linear, inthe case of the quadratic variation of temperature. To oversimplify a little bit, themore complex the temperature variations that are reproduced without error, thehigher the overall accuracy of the scheme.
Secondly, introducing different element types may enable us to play games withdifferent quadrature schemes. One view of the finite element method could put thebasis function above all: the elements are there only to integrate all the expressionsthat involved the basis functions and their derivatives as accurately as possible(exactly?). However,
8.1 Quadratic triangle T6
The triangle T6 makes it possible to design basis functions that can reproducequadratic variations of the temperature. More precisely, it will do that in the termsof the coordinates on the standard triangle. As we shall see, the map from thestandard triangle will also allow for quadratic temperature variation in the physicalspace, but more generally it will lead to rational expressions.
The first task will be to formulate the basis functions on the standard triangle,Figure 8.1. To be able to write down a polynomial for a particular basis function thatis quadratic in ξ, η, six coefficients will be needed. To determine these coefficients,we will make use of the common device of equipping the basis functions with theKronecker delta property (2.19). Let us start with the basis function N2 = a0 +a1ξ + a2η + a3ξη + a4ξ
2 + a5η2: writing
N2(ξk, ηk) = δ2k, for k = 1, , 6
at all six nodes (see Table 8.1), provides us with six equations from which thesix coefficients may be determined. That is however tedious and boring: let us use

70 8 Expanding the library of element types
Fig. 8.1. Standard quadratic triangle.
commonsense and guesswork instead. Drawing the standard triangle plane whilelooking along the η axis we see that three and two nodes respectively align, whichobviously makes it possible to make the function N2 equal to zero in these twolocations, and equal to one at node 2 with a Lagrange polynomial
N2 =(ξ − 0)(ξ − 1/2)(1− 0)(1− 1/2)
= ξ(2ξ − 1)
Similarly, in the other direction we have for N3 = η(2η − 1).
Fig. 8.2. Standard quadratic triangle: one-dimensional view of basis function N2.
To approach the construction of the other basis functions, we note that both N2
and N3 may be written as the normalized product of planes: for N2 the two planesare p2(ξ, η) = ξ and p2(ξ, η) = ξ − 1/2, and N2 is written as
N2 =p2(ξ, η)p2(ξ, η)p2(1, 0)p2(1, 0)
= ξ(2ξ − 1) .
Similarly for N3 and N1: the recipe is to find two planes that go through threenodes and two nodes respectively (but not through the node at which the functionis supposed to be equal to one), and normalize their product. For N1 the planes arep1(ξ, η) = 1 − ξ − η (this is the same N1 as in (5.13) ) and p1(ξ, η) = 1 − 2ξ − 2η(compare with Figure 8.3)
N1 = (1− ξ − η)(1− 2ξ − 2η) .
For the mid-edge nodes, 4, 5, 6, we find planes that pass through two triples ofnodes. For instance, for node 6 (see Figure 8.3), the two planes are p6(ξ, η) = 1−ξ−ηand p6(ξ, η) = η (same as N3 as in (5.12)
N6 = 4(1− ξ − η)η .

8.3 Point element P1 71
Coordinate Node 1 Node 2 Node 3 Node 4 Node 5 Node 6
ξ 0 1 0 1/2 1/2 0η 0 0 1 0 1/2 1/2
Table 8.1. Standard quadratic triangle: locations of the nodes
Fig. 8.3. Standard quadratic triangle: Basis functions N2, N1, and N6.
8.2 Quadratic 1-D element L3
8.3 Point element P1
Looking at the classes/gcell folder, one may notice the gcell X manifold classfolders with X= 0, 1, 2, 3. All SOFEA geometric cells are of certain so-called manifolddimension: solids are of manifold dimension 3, surfaces are of dimension 2, whilecurves and points are of dimensions 1 and 0. Since we commonly solve heat diffusion(and other problems) in domains that are solids, surfaces, and curves, we alsohave to deal with integration over the boundaries of these domains; these are,correspondingly, surfaces, curves, and points.
When the heat diffusion problem was being formulated in two-dimensional do-mains in Section 5, the discrete domain consisted of triangles (elements T3), andthe discrete boundary consisted of line segments (elements L2). Analogously, whenthe heat diffusion is solved in a one-dimensional domain (interval of the real line)which is covered by elements L2, the boundary consists of two points: hence theneed for elements of type P1.
Evaluating the integrals of the surface heat transfer matrix (5.28) and the sur-face heats transfer load (5.27) (and also the prescribed heat flux load (5.26)) overthe boundary on interval on the real line simply means taking the values of the inte-grants at the end points. In terms of a quadrature formula applied at the boundarypoint a (analogous to (2.24)),
f(a) ≈ f(ξ1)J(ξ1)W1
which is going to give the expected results with ξ1 = 0, f(ξ1) = f(a), W1 = 1, andthe Jacobian J(ξ1) = 1. The quadrature rule with these properties is point rule,and a sample script to use this type of evaluation of boundary integrals for one-dimensional heat diffusion problems is transcool1.
Programming remark : With the introduction of the element P1, a closure isachieved: the same code will now work for heat diffusion problems solved on one-dimensional, two-dimensional, and three-dimensional domains. The programming
1Folder: SOFEA/examples/diffusion
72 8 Expanding the library of element types
principles of object-oriented design that are in action here are polymorphism (themethods operate on objects in different types uniformly), and dynamic dispatch(an appropriate method is selected based on the class of the object on which it isinvoked).
8.4 Measuring (integrating) over domains
The uniform treatment of the manifold dimension of the domain allows us to pro-duce dimension-independent code. Therefore, integration of any scalar function overany domain or subdomain is carried out by a single method of the class feblock.Consider as an example the geometry of a cylinder, the volume tiled with tetrahe-dra, the bounding surface covered with triangles, the edges of the cylindrical facesapproximated with straight two-node segments, and one node at each vertex of themesh. We may integrate over the volume of the 3-D mesh to find and approxima-tion of the volume of the original cylinder; or over the length of a single edge toapproximate the circumference; or over the area of one circular face to find an ap-proximation of the cross-sectional area; or to count all the nodes on the cylindricalsurface when we integrate over all the vertices of the triangles on that surface.
Fig. 8.4. Geometry of a cylinder.
The method measure of the class feblock evaluates the integral∫
Vn
f(x) dVn , (8.1)
where Vn is the volume of an n-dimensional manifold (n = 0, 1, 2, 3). The methodtakes as arguments the geometry field (evidently, the volume of any discrete mani-fold is going to depend on the locations of its vertices), and a function handle.
0013 function result = measure2 (self, geom, varargin)0014 gcells =self.gcells;0015 ngcells = length(self.gcells);0016 % Integration rule0017 integration rule = get(self, ’integration rule’);0018 pc = get(integration rule, ’param coords’);
2Folder: SOFEA/classes/feblock/@feblock
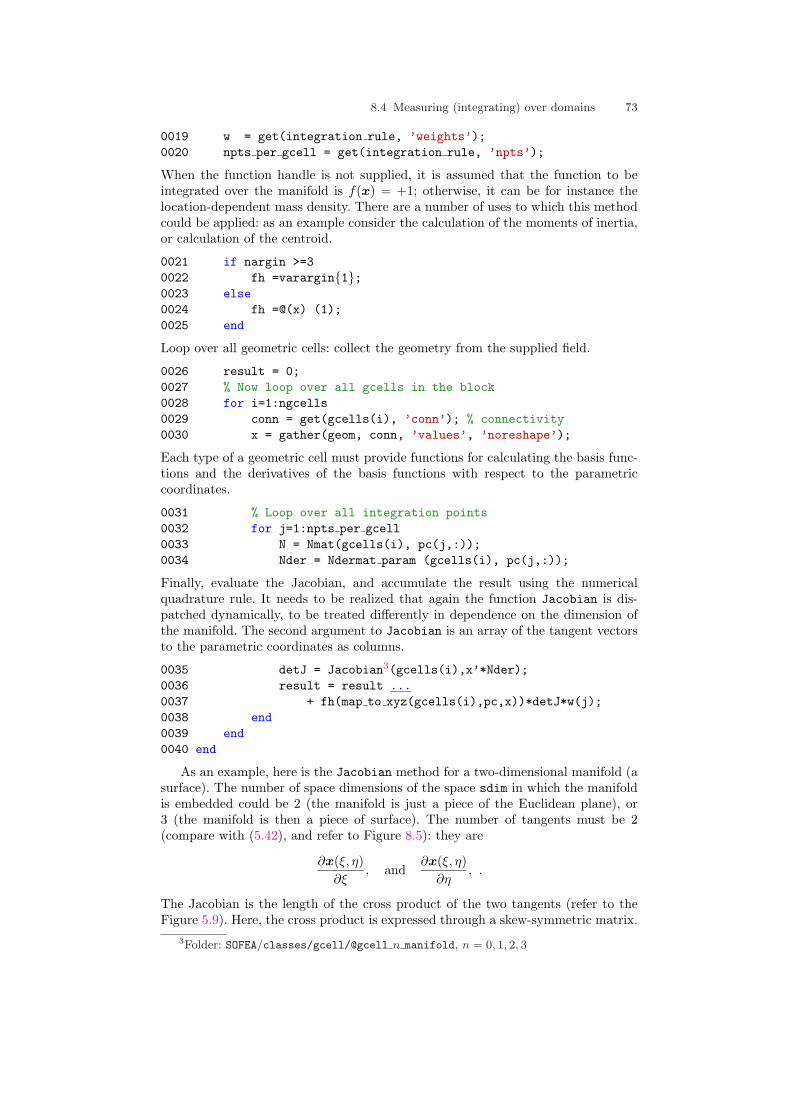
8.4 Measuring (integrating) over domains 73
0019 w = get(integration rule, ’weights’);0020 npts per gcell = get(integration rule, ’npts’);
When the function handle is not supplied, it is assumed that the function to beintegrated over the manifold is f(x) = +1; otherwise, it can be for instance thelocation-dependent mass density. There are a number of uses to which this methodcould be applied: as an example consider the calculation of the moments of inertia,or calculation of the centroid.
0021 if nargin >=30022 fh =varargin{1};0023 else0024 fh =@(x) (1);0025 end
Loop over all geometric cells: collect the geometry from the supplied field.
0026 result = 0;0027 % Now loop over all gcells in the block0028 for i=1:ngcells0029 conn = get(gcells(i), ’conn’); % connectivity0030 x = gather(geom, conn, ’values’, ’noreshape’);
Each type of a geometric cell must provide functions for calculating the basis func-tions and the derivatives of the basis functions with respect to the parametriccoordinates.
0031 % Loop over all integration points0032 for j=1:npts per gcell0033 N = Nmat(gcells(i), pc(j,:));0034 Nder = Ndermat param (gcells(i), pc(j,:));
Finally, evaluate the Jacobian, and accumulate the result using the numericalquadrature rule. It needs to be realized that again the function Jacobian is dis-patched dynamically, to be treated differently in dependence on the dimension ofthe manifold. The second argument to Jacobian is an array of the tangent vectorsto the parametric coordinates as columns.
0035 detJ = Jacobian3(gcells(i),x’*Nder);0036 result = result ...0037 + fh(map to xyz(gcells(i),pc,x))*detJ*w(j);0038 end0039 end0040 end
As an example, here is the Jacobian method for a two-dimensional manifold (asurface). The number of space dimensions of the space sdim in which the manifoldis embedded could be 2 (the manifold is just a piece of the Euclidean plane), or3 (the manifold is then a piece of surface). The number of tangents must be 2(compare with (5.42), and refer to Figure 8.5): they are
∂x(ξ, η)∂ξ
, and∂x(ξ, η)
∂η, .
The Jacobian is the length of the cross product of the two tangents (refer to theFigure 5.9). Here, the cross product is expressed through a skew-symmetric matrix.
3Folder: SOFEA/classes/gcell/@gcell n manifold, n = 0, 1, 2, 3
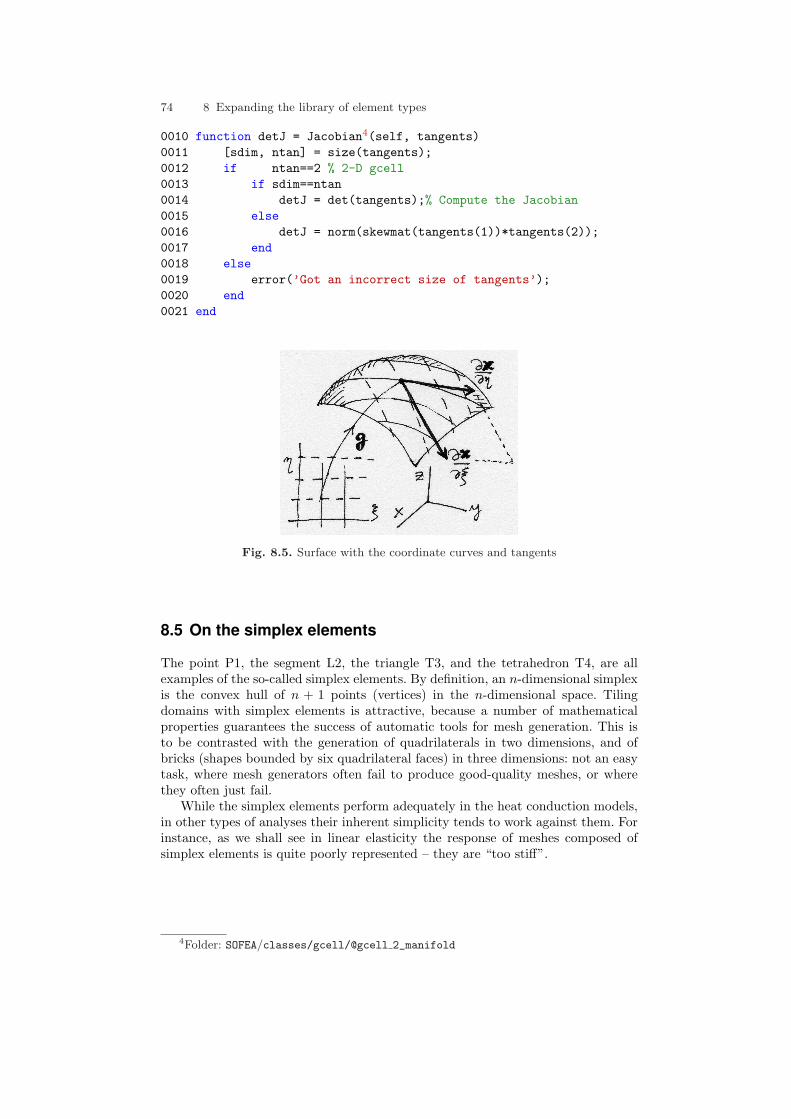
74 8 Expanding the library of element types
0010 function detJ = Jacobian4(self, tangents)0011 [sdim, ntan] = size(tangents);0012 if ntan==2 % 2-D gcell0013 if sdim==ntan0014 detJ = det(tangents);% Compute the Jacobian0015 else0016 detJ = norm(skewmat(tangents(1))*tangents(2));0017 end0018 else0019 error(’Got an incorrect size of tangents’);0020 end0021 end
Fig. 8.5. Surface with the coordinate curves and tangents
8.5 On the simplex elements
The point P1, the segment L2, the triangle T3, and the tetrahedron T4, are allexamples of the so-called simplex elements. By definition, an n-dimensional simplexis the convex hull of n + 1 points (vertices) in the n-dimensional space. Tilingdomains with simplex elements is attractive, because a number of mathematicalproperties guarantees the success of automatic tools for mesh generation. This isto be contrasted with the generation of quadrilaterals in two dimensions, and ofbricks (shapes bounded by six quadrilateral faces) in three dimensions: not an easytask, where mesh generators often fail to produce good-quality meshes, or wherethey often just fail.
While the simplex elements perform adequately in the heat conduction models,in other types of analyses their inherent simplicity tends to work against them. Forinstance, as we shall see in linear elasticity the response of meshes composed ofsimplex elements is quite poorly represented – they are “too stiff”.
4Folder: SOFEA/classes/gcell/@gcell 2_manifold

8.7 Tetrahedron T4 75
8.6 Quadrilateral Q4
8.7 Tetrahedron T4
The tetrahedron with four nodes at the corners (element T4) is a straightforwardextension of the triangle T3. The standard tetrahedron is shown in Figure 8.6. Thebasis functions in the parametric coordinates are designed to be linear functions ofξ, η, ζ, and there are four corners at which to use the Kronecker delta property. Itis straightforward to deduce that
N1(ξ, η, ζ) = 1−ξ−η−ζ , N2(ξ, η, ζ) = ξ , N3(ξ, η, ζ) = η , N4(ξ, η, ζ) = ζ . (8.2)
Fig. 8.6. Standard tetrahedron
Rule Coordinates ξj , ηj , ζj Weights Wj Integrates exactly
1-point 1/4, 1/4, 1/4 1/6 linear polynomial
4-point
0.1381966, 0.1381966, 0.13819660.5854102, 0.1381966, 0.13819660.1381966, 0.5854102, 0.13819660.1381966, 0.1381966, 0.5854102
0.04160.04160.04160.0416
quadratic polynomial
Table 8.2. Numerical integration rules on the standard tetrahedron
The four basis functions of the tetrahedron each vanish along the opposite face(basis function Ni on the face opposite node i and so on). The remaining three varyalong this face exactly as if it was a triangle T3. The situation is entirely analogousto the one discussed in Section 5.9 for the triangle T3 and the line segment L2.Therefore, evaluation of the surface heat transfer contributions is simply performedusing geometric cells of type T3.
The script helixcooled5 illustrates a solution with a full 3-D geometry dis-cretized with the T4 tetrahedra. The problem is to determine steady state surfacetemperature for a helical spring, with variable cross-section– see Figure 8.7. Thethick end is maintained at constant temperature, and on the rest of the surfacethere’s convection cooling.
The mesh is a simple regular block tiled with tetrahedra, but it is then shapedby moving nodes to different locations using the utility transform apply, first bychanging its cross-section, and then by shifting all nodes in the y-direction. Finally,the shape is twisted into a helix using transform 2 helix.
5Folder: SOFEA/examples/diffusion
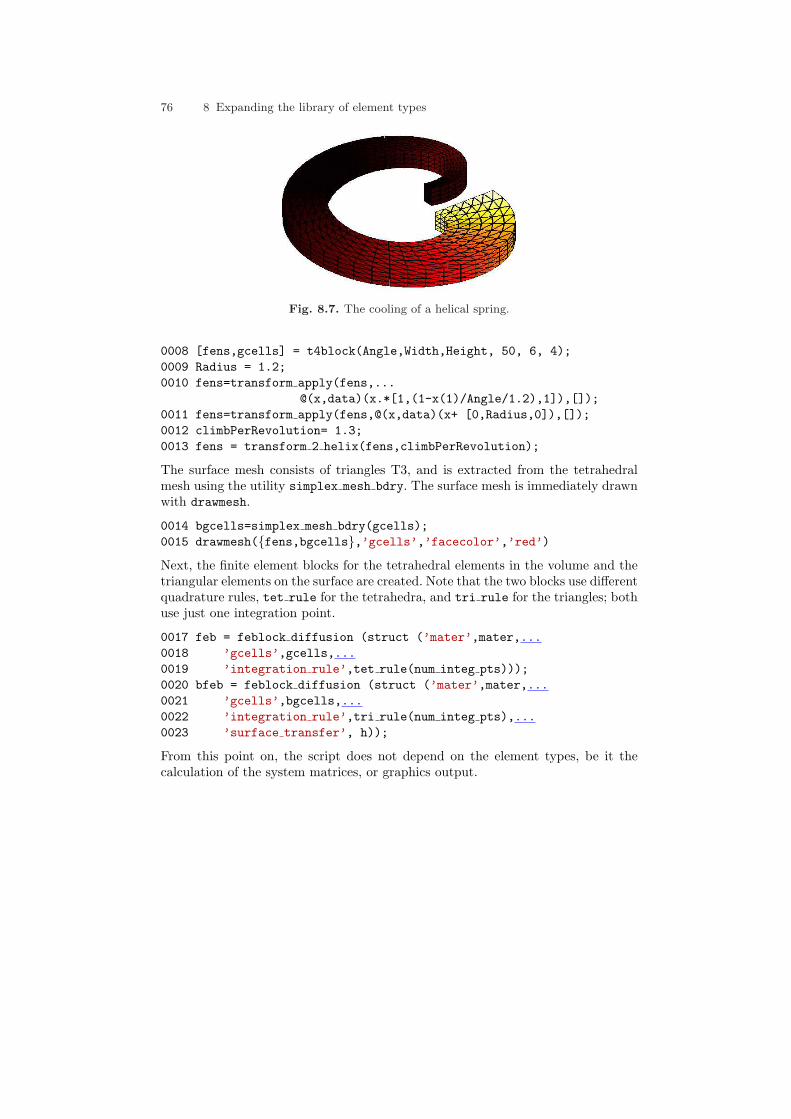
76 8 Expanding the library of element types
Fig. 8.7. The cooling of a helical spring.
0008 [fens,gcells] = t4block(Angle,Width,Height, 50, 6, 4);0009 Radius = 1.2;0010 fens=transform apply(fens,...
@(x,data)(x.*[1,(1-x(1)/Angle/1.2),1]),[]);0011 fens=transform apply(fens,@(x,data)(x+ [0,Radius,0]),[]);0012 climbPerRevolution= 1.3;0013 fens = transform 2 helix(fens,climbPerRevolution);
The surface mesh consists of triangles T3, and is extracted from the tetrahedralmesh using the utility simplex mesh bdry. The surface mesh is immediately drawnwith drawmesh.
0014 bgcells=simplex mesh bdry(gcells);0015 drawmesh({fens,bgcells},’gcells’,’facecolor’,’red’)Next, the finite element blocks for the tetrahedral elements in the volume and thetriangular elements on the surface are created. Note that the two blocks use differentquadrature rules, tet rule for the tetrahedra, and tri rule for the triangles; bothuse just one integration point.
0017 feb = feblock diffusion (struct (’mater’,mater,...0018 ’gcells’,gcells,...0019 ’integration rule’,tet rule(num integ pts)));0020 bfeb = feblock diffusion (struct (’mater’,mater,...0021 ’gcells’,bgcells,...0022 ’integration rule’,tri rule(num integ pts),...0023 ’surface transfer’, h));
From this point on, the script does not depend on the element types, be it thecalculation of the system matrices, or graphics output.
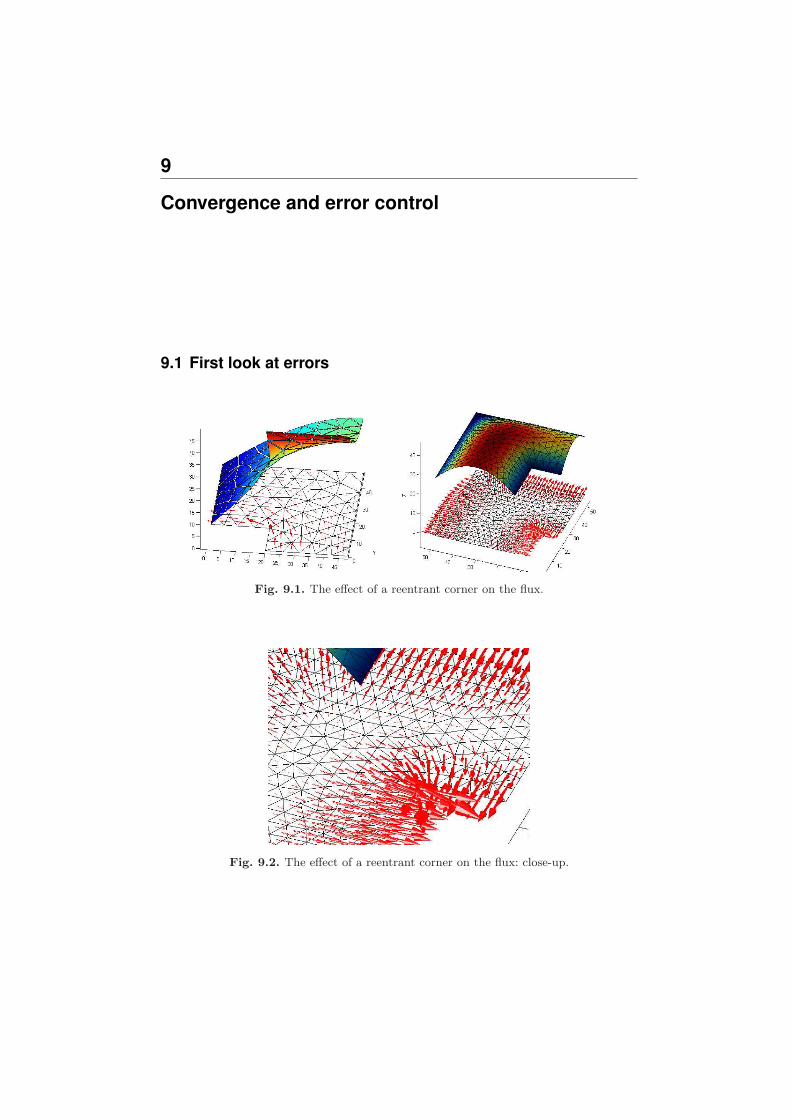
9
Convergence and error control
9.1 First look at errors
Fig. 9.1. The effect of a reentrant corner on the flux.
Fig. 9.2. The effect of a reentrant corner on the flux: close-up.
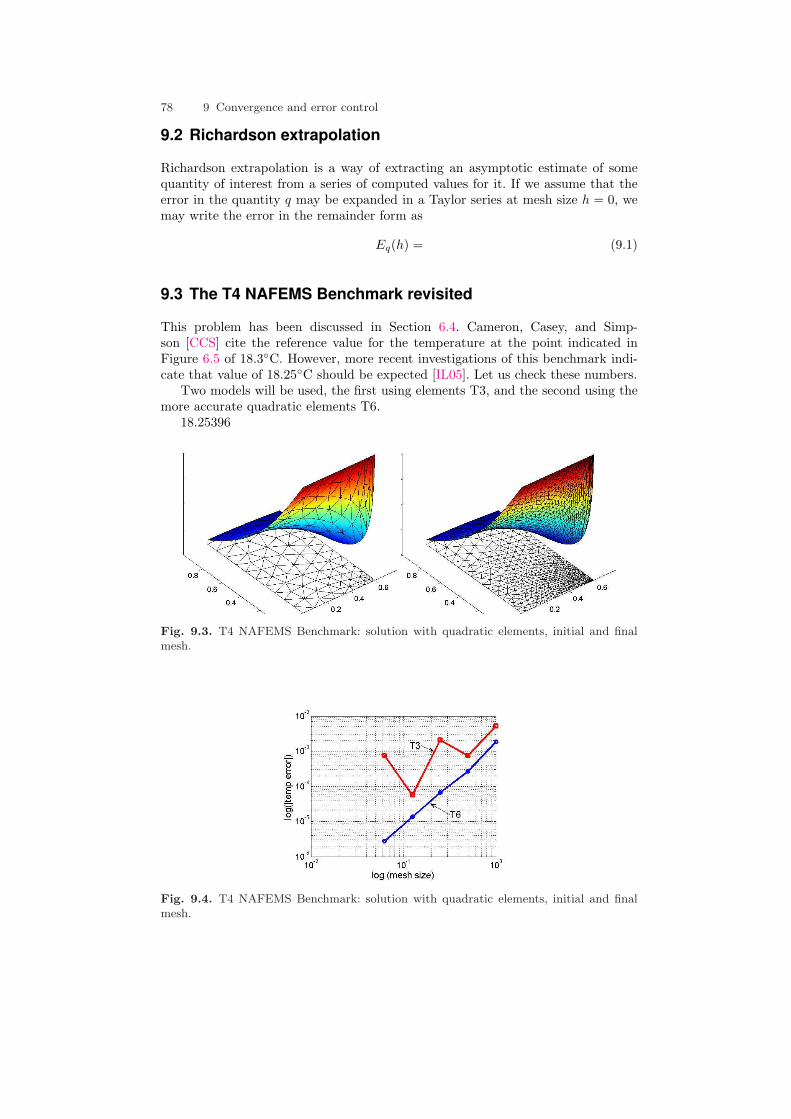
78 9 Convergence and error control
9.2 Richardson extrapolation
Richardson extrapolation is a way of extracting an asymptotic estimate of somequantity of interest from a series of computed values for it. If we assume that theerror in the quantity q may be expanded in a Taylor series at mesh size h = 0, wemay write the error in the remainder form as
Eq(h) = (9.1)
9.3 The T4 NAFEMS Benchmark revisited
This problem has been discussed in Section 6.4. Cameron, Casey, and Simp-son [CCS] cite the reference value for the temperature at the point indicated inFigure 6.5 of 18.3◦C. However, more recent investigations of this benchmark indi-cate that value of 18.25◦C should be expected [IL05]. Let us check these numbers.
Two models will be used, the first using elements T3, and the second using themore accurate quadratic elements T6.
18.25396
Fig. 9.3. T4 NAFEMS Benchmark: solution with quadratic elements, initial and finalmesh.
Fig. 9.4. T4 NAFEMS Benchmark: solution with quadratic elements, initial and finalmesh.
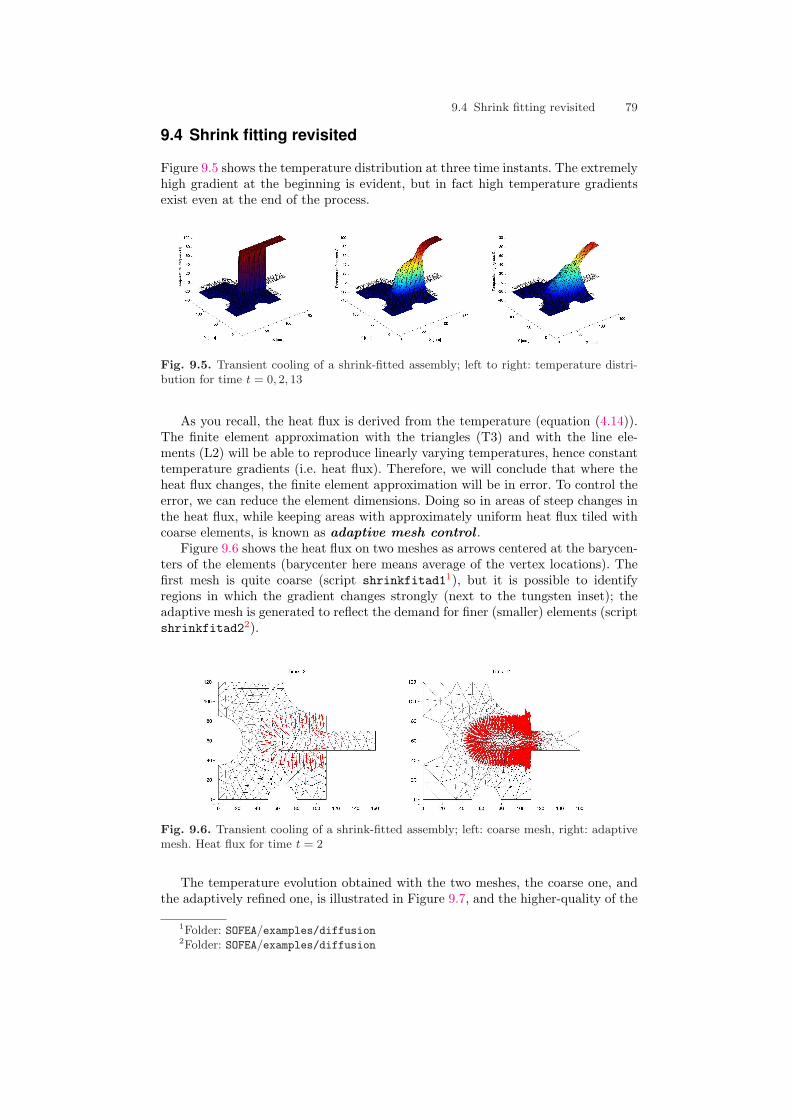
9.4 Shrink fitting revisited 79
9.4 Shrink fitting revisited
Figure 9.5 shows the temperature distribution at three time instants. The extremelyhigh gradient at the beginning is evident, but in fact high temperature gradientsexist even at the end of the process.
Fig. 9.5. Transient cooling of a shrink-fitted assembly; left to right: temperature distri-bution for time t = 0, 2, 13
As you recall, the heat flux is derived from the temperature (equation (4.14)).The finite element approximation with the triangles (T3) and with the line ele-ments (L2) will be able to reproduce linearly varying temperatures, hence constanttemperature gradients (i.e. heat flux). Therefore, we will conclude that where theheat flux changes, the finite element approximation will be in error. To control theerror, we can reduce the element dimensions. Doing so in areas of steep changes inthe heat flux, while keeping areas with approximately uniform heat flux tiled withcoarse elements, is known as adaptive mesh control .
Figure 9.6 shows the heat flux on two meshes as arrows centered at the barycen-ters of the elements (barycenter here means average of the vertex locations). Thefirst mesh is quite coarse (script shrinkfitad11), but it is possible to identifyregions in which the gradient changes strongly (next to the tungsten inset); theadaptive mesh is generated to reflect the demand for finer (smaller) elements (scriptshrinkfitad22).
Fig. 9.6. Transient cooling of a shrink-fitted assembly; left: coarse mesh, right: adaptivemesh. Heat flux for time t = 2
The temperature evolution obtained with the two meshes, the coarse one, andthe adaptively refined one, is illustrated in Figure 9.7, and the higher-quality of the
1Folder: SOFEA/examples/diffusion2Folder: SOFEA/examples/diffusion
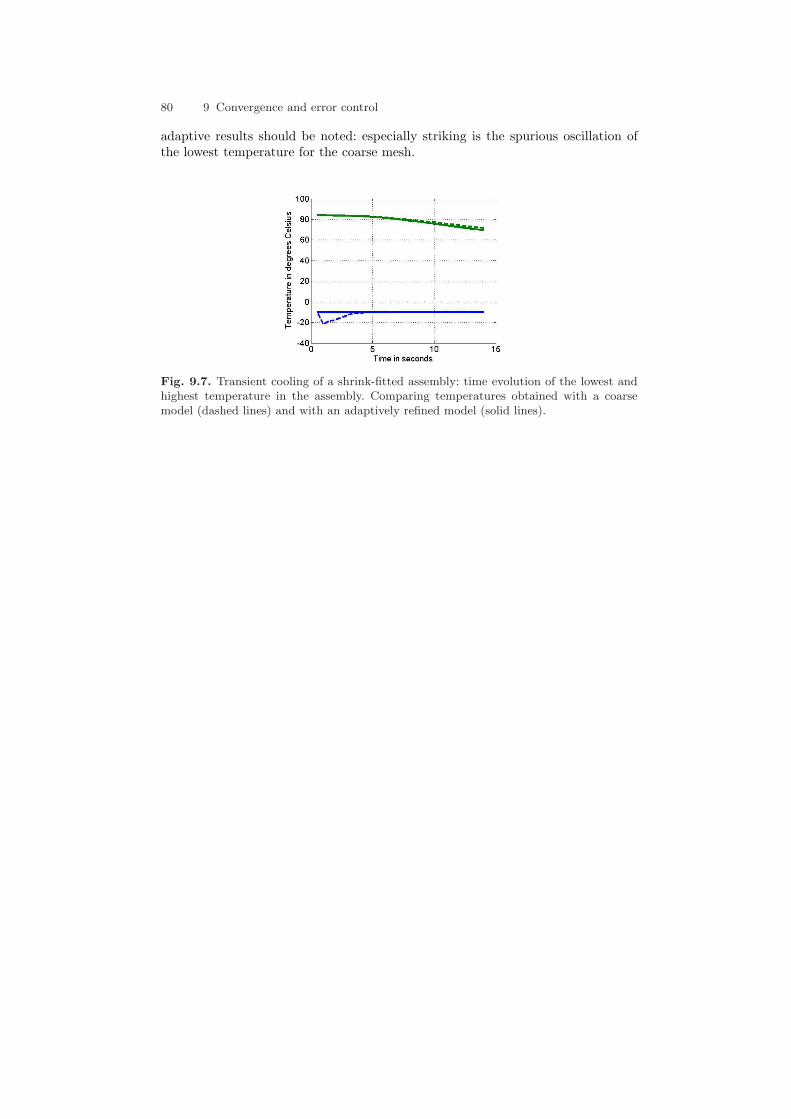
80 9 Convergence and error control
adaptive results should be noted: especially striking is the spurious oscillation ofthe lowest temperature for the coarse mesh.
Fig. 9.7. Transient cooling of a shrink-fitted assembly: time evolution of the lowest andhighest temperature in the assembly. Comparing temperatures obtained with a coarsemodel (dashed lines) and with an adaptively refined model (solid lines).

Part III
Stress analysis

10
Model of elastodynamics
10.1 Balance equation

References
Gra91. Graff, KF: Wave motion in elastic solids. Dover publications, New York (1991)Hug00. Hughes, TJR: The finite element method. Linear static and dynamic finite ele-
ment analysis. Dover publications, New York (2000).This book is a must-read for anyone serious about learning finite element anal-ysis properly. Meticulously written, and brimming with insights. Quite mathe-matical.
CC2005. Chapra, SC and RP Canale: Numerical Methods for Engineers. McGraw-Hill(2005)
CCS. A.D. CAMERON, J.A. CASEY, G.B. SIMPSON: Benchmark Tests for ThermalAnalyses, NAFEMS Documentation.
IL05. http://www.infolytica.com/en/coolstuff/ex0047/

Index
Jacobian, 73
adaptive mesh control, 79argument
passed by value, 21
balance equation, 3global, 26local, 26
balance residual, 7barycenter, 79basis function
derivative, 42triangle T3, 35triangle T6, 70
basis functions, 11boundary condition
essential, 5, 28natural, 5, 28
boundary conditions, 4Bubnov-Galerkin method, 7
capacity matrix, 39chain rule, 16change of coordinates in integrals, 44circular frequency, 22classbody load, 21dense sysmat, 21elemat, 45feblock diffusion, 44, 52feblock, 20, 44, 72field, 20, 64gcell T3, 42gcell, 42sysvec, 21tet rule, 76tri rule, 52, 76fenode, 20
Clough, 34conductivity matrix, 39
connectivity, 20constructor, 20control volume, 25convex hull, 74Courant, 34Crank-Nicholson method, 62cross product, 43, 73curved boundary
approximation, 38
degree of freedom, 14diagonal mass matrix, 17Dirac delta function, 9divergence theorem, 26dynamic dispatch, 72
eigenmode, 22error
heat flux, 79essential boundary condition, 5
finite differencebackward Euler, 62forward Euler, 62
finite element, 13edge, 34isoparametric, 40L2, 13node, 13, 34T3, 42T6, 69
finite element mesh, 13free vibration, 22
Galerkin method, 7generalized eigenvalue problem, 22generalized trapezoidal method, 61, 62geometric cells, 20
hat function, 34heat
88 Index
conduction, 25diffusion, 25
heat energy, 25heat flux, 25
initial boundary value problem, 6initial conditions, 5integration by parts, 10integration rule
tetrahedron, 75triangle, 44, 70
interpolation, 11isoparametric element, 40isotropic material, 27
Jacobian, 44Jacobian determinant, 15Jacobian matrix, 41, 43
Kronecker delta, 14, 69
Lagrange interpolation polynomial, 13
manifold dimension, 71, 72map
of areas, 44of points, 43of vectors, 43
mass matrix, 12Matlab scripthelixcooled, 75lshape1, 52shrinkfit, 65squareinsquare, 54t3nafems, 63t4nafems, 56transcool, 71
methodbackward Euler, 62Crank-Nicholson, 62forward Euler, 62
natural boundary conditions, 5Newmark explicit algorithm, 17Newton’s law, 3node, 13numerical quadrature, 14
point, 71triangles, 44
ordinary differential equations, 12orthotropic material, 27outer normal, 25
parametric coordinates, 16piecewise linear, 9piecewise linear approximation, 12polymorphism, 72
quadrature point, 15
rate of heat generation, 26reduction
dimension, 32residual, 7, 10Richardson extrapolation, 78
simplex element, 74Simpson’s 1/3 rule, 15skew-symmetric matrix, 73smoothness, 10sparse matrix, 12specific heat, 26standard interval, 15, 47standard tetrahedron, 75standard triangle, 35, 69static equilibrium, 19stiffness matrix, 12surface heat transfer matrix, 40symmetric matrix, 12
tangent vector, 43, 48, 73taut string, 3temperature gradient, 27tent, 34test function, 8thermal conductivity, 27transformation matrix, 46trial function, 10, 11trial-and-test approximate method, 9triangulation, 34
utilitydrawmesh, 76simplex mesh bdry, 76transform apply, 75
weighted residual method, 8