Embed Size (px)
Citation preview

Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Contents lists available at ScienceDirect
Nonlinear Analysis: Real World Applications
journal homepage: www.elsevier.com/locate/nonrwa
A stochastic multiscale model for acid mediated cancerinvasionSandesh Hiremath, Christina Surulescu ∗
Technische Universität Kaiserslautern, Felix-Klein-Zentrum für Mathematik, Paul-Ehrlich-Str. 31, 67663 Kaiserslautern, Germany
a r t i c l e i n f o
Article history:Received 29 July 2014Accepted 27 August 2014
Keywords:Stochastic multiscale modelsAcid-mediated tumor invasionWell posedness
a b s t r a c t
Cancer research is not only a fast growing field involvingmany branches of science, but alsoan intricate and diversified field rife with anomalies. One such anomaly is the consistentreliance of cancer cells on glucosemetabolism for energy production even in anormoxic en-vironment. Glycolysis is an inefficient pathway for energy production and normally is usedduring hypoxic conditions. Since cancer cells have a high demand for energy (e.g. for prolif-eration) it is somehowparadoxical for them to rely on such amechanism. An emerging con-jecture aiming to explain this behavior is that cancer cells preserve this aerobic glycolyticphenotype for its use in invasion and metastasis (see, e.g., Gatenby and Gillies (2004) [1],Racker (1976) [2]). We follow this hypothesis and propose a new model for cancer inva-sion, depending on the dynamics of extra- and intracellular protons, by building upon theexisting ones. We incorporate random perturbations in the intracellular proton dynamicsto account for uncertainties affecting the cellular machinery. Finally, we address the well-posedness of our setting and use numerical simulations to illustrate themodel predictions.
© 2014 Elsevier Ltd. All rights reserved.
1. Introduction
A recent approach in cancer therapy is to consider the role of tumor microenvironment in the onset of malignancyin tumors. Gatenby and Gillies [3] suggested that environmental conditions may drive the selection of the cancerousphenotype. Hypoxia and acidity, for instance, are factors that can trigger the progression from benign to malignant growth[4,5]. To survive in their environment, tumor cells upregulate certain proton extrusion mechanisms. This boosts apoptosisin normal cells, thereby allowing the neoplastic tissue to extend into the available space. Tumor acidificationwas recognizedas an intrinsic property of both poor vasculature and altered cancer cell metabolism. Moreover, the pH directly influencesthe metastatic potential of tumor cells [6,7].
Starting from these facts, Gatenby and Gawlinski [8] proposed a model for the acid-mediated tumor invasion whichuses reaction–diffusion partial differential equations (RD-PDEs) to describe the interaction between the density of normalcells, tumor cells, and the concentration of H+ ions produced by the latter. Traveling waves were used in this frameworkto explain the aggressive action of cancer cells on their surroundings [9]. Further developments of Gatenby and Gawlinski’smodel involve both vascular and avascular growth of multicellular tumor spheroids, assuming rotational symmetry, forwhich existence and qualitative properties of the solutionswere investigated [10]. In [11] themodel in [8] for acid-mediatedtumor invasion was reconsidered, wherein crowding effects (due to competition with cancer cells) in the growth of normalcells were taken into account. The global existence of a unique solution was proved via an iteration argument.
∗ Corresponding author. Tel.: +49 6312055312.E-mail addresses: [email protected] (S. Hiremath), [email protected] (C. Surulescu).
http://dx.doi.org/10.1016/j.nonrwa.2014.08.0081468-1218/© 2014 Elsevier Ltd. All rights reserved.

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 177
All the models mentioned above consider macroscopic dynamics of cancer and normal cell populations which arecoupled – still on the macrolevel – with the evolution of extracellular H+ concentration and possibly also with theconcentration of MDEs [12]. It is clear, however, that subcellular, microlevel proton dynamics are actually regulating andare influenced significantly by the events on the higher (i.e., macroscopic and mesoscopic) levels [13,14,5]. Mathematicalmodels studying the interdependence between the activity of several membrane ion transport systems and the changesin the peritumoral space were proposed by Webb et al. [15,16]. They also involve intracellular proton buffering, effectson the expression/activation of MMPs and proton removal by vasculature. [16] also accounts for the influence of alkalineintracellular pH on the growth of tumor cells. Such a model can thus be seen as a first step towards a multiscale setting.The actual invasive behavior, however, can only be assessed when spatial dependence is taken into account. This requiresa higher dimensional and more complex modeling framework that couples the subcellular dynamics at microscopic scalewith the population dynamics at themacroscopic scale. Micro–macromodels of this type (in a different, but related context)were proposed and analyzed e.g., in [17–19].
Stochasticity is a relevant feature inherent to many biological processes occurring on all modeling levels. In particular, itseems to greatly influence subcellular dynamics and individual cell behavior. Models taking this into accountwere proposedand analyzed in various contexts (cell dispersal, intracellular signaling, radio-oncological treatment, pattern formation)in [20–23]. In the framework of acid-mediated tumor invasion, too, experiments suggest stochasticity in pH dynamics; thisrefers to variations and uncertainties (essentially due to a random environment) in the behavior of each cell even thoughthey all follow the same biochemical mechanisms. The distribution of intracellular pH (pHi) at any value of extracellularpH (pHe) was found to be broader than what was predicted by theoretical models based on machine noise and stochasticvariation in the activity of membrane-based mechanisms regulating pHi [13]. Moreover, excess current fluctuations havebeen observed in the gating of the ion channels [24].
Motivated by these facts we propose here a stochastic multiscale model for cancer invasion, to be developed in Section 2and analyzed w.r.t. well posedness in Section 3. Further, in Section 4 we perform some simulation results to illustrate itsperformance and eventually discuss in Section 5 the results and comment on the potential of this new model class.
2. Model setup
In this section we set up a phenomenological model for the acid mediated tumor invasion. To this aim we identify fourmain quantities and account for their dynamics: H denotes the proton concentration and refers only to cancer cells, as weare interested in the effect of tumor-induced acidity. Thereby, we take into account both the intracellular protons (whoseconcentration we denote with Hi) and the extracellular ones, having concentration He. The other two quantities are thetumor cell density C and the normal cell density N .
2.1. Microscopic dynamics: the intracellular proton concentration
The dynamics of intracellular protons is described by the following random differential equation:
∂tHi = −T1(Hi,He) − T2(Hi,He) + T3(Hi) + S1(v) − Q (Hi) + F(χt ,Hi) (1)
T1, T2, and T3 are real valued functions representing NDCBE, NHE, and AE transporters, respectively.1 To acquire a concreteform for these transporter terms – in the absence of numerical data – we followed e.g., [15] and tried to mimic for T1 and T2functions the qualitative curves obtained experimentally in [25] for the efflux of protons by NDCBE and NHE in MGU-1 celllines. For the T3 function we adopted the approach in [15] and made it a monotone decreasing function of Hi, since the AEacts as a counter-mechanism for the alkalinization of cytoplasm. Furthermore, Q denotes the function representing the lossof free protons due to intracellular buffering (e.g., by organelles). The function S1 in (1) represents the observed constantacid production rate in cancer cells due to aerobic glycolysis. It is parameterized by tissue vasculature (v). The qualitativefeatures of all these functions are depicted in Figs. 1 and 2.
As a cell is a complexmachinery influenced by a plethora of biochemical and background processes, a phenomenologicaldeterministic model is prone to be highly idealized and fails to account for the complex behavior of the intracellularenvironment and its interactions with the cell’s surroundings. One approach to remove this drawback would be to userandom terms serving as an ensemble of uncertainties influencing the proton dynamics. Herewe consider a state dependentnoise of the following form2:
F(χt ,Hi) := F1(Hi)F2(Ba,bt ) := ϑHiB
a,bt , (2)
where Ba,bt is a Brownian bridge process starting at a and ending at b. Thereby, a, b ∈ R and ϑ are some independent
parameters.
1 NDCBE (Na+ dependent Cl−–HCO−
3 exchanger), NHE (Na+ and H+ exchanger) and AE (Cl−–HCO−
3 or anion exchanger) are specific transporters presenton the cell membrane.2 Other choices involving e.g., an Ornstein–Uhlenbeck process or a bounded function of a Brownian motion are conceivable as well, see [26] for the use
of a Brownian bridge in a problem dealing with a different kind of biological movement.

178 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
T1(Hi,He)
T2(Hi,He)
He(M)
Hi(M)
1. × 10–7
1. × 10–7
2. × 10–7
2. × 10–7
3. × 10–7
He(M)1. × 10–7
2. × 10–7
3. × 10–7
3. × 10–7
0.010 0.006
0.004
0.0020.005
Efflux (mM/min)
Efflux (mM/min)
0
Hi(M)
1. × 10–7
2. × 10–7
3. × 10–7
0
Fig. 1. Functions representing NDCBE and NHE transporters.
T3(Hi) Q(Hi) S1(v)
Hi(M) Hi
Influx (M/min) M/min
0.015
0.010
0.005
1. × 10–6 2. × 10–6 3. × 10–6 4. × 10–6 5. × 10–6
0.0010
0.0008
0.0006
0.0004
0.0002
M/min0.0040
0.0035
0.0030
0.0025
0.0015
0.0020
2 4 6 8 10 0.5 1.0 1.5 2.0
Vasculature (v)
Fig. 2. Functions representing AE transporter and proton production and loss terms.
2.2. Extracellular proton concentration
The next quantity of interest in our model is the extracellular proton concentration He(t, x), which is modeled to satisfythe following equation:
∂tHe = T1(Hi,He) + T2(Hi,He) − T3(Hi) − S2(v)He + D11He. (3)
The transport functions T1, T2 and T3 are asmentioned above. The function S2 is used to describe the removal of acid (protons)from the extracellular (interstitial) space by vasculature and takes the form
S2(v) := a5κv. (4)
We include diffusion as a way to describe acidity patterns in the peritumoral region. The parameter D1 > 0 represents thediffusion coefficient of the extracellular protons. To shorten the notation, we denote by T (Hi,He) the efflux of protons as acombined effect of T1, T2, and T3 i.e.
T (Hi,He) := T1(Hi,He) + T2(Hi,He) − T3(Hi). (5)
We collect the parameters involved in the dynamics of Hi and He into the vector Ξ := (v, κ)T . Their values are chosen withthe aim of achieving the long time behavior of a reverse pH gradient.
2.3. Cell dynamics on the macroscale
Since we want to study the effect of proton concentrations on cancer cell invasion we need to characterize the dynamicsof tumor cell density C(t, x) and normal cell density N(t, x). The former is supposed to satisfy the reaction–diffusionequation
∂tC = ϱ1Λ1(Hi)C1 − ηC
CKC
− ϱ1Λ
+
1 (Hi)ηNCNKN
+ ∇ ·
D2(C,N)∇C
, (6)
where Λ+
1 (Hi) := max(Λ1(Hi), 0) is the positive part of Λ1(Hi). We use a (modified) Lotka–Volterra type reaction termto model inter- and intra-species competition between cancer cells and normal cells. This can be explicitly written asϱ1C
1 − ηC
CKC
− ηNNKN
. The proliferation function Λ1(Hi) represents the influence of intracellular proton concentration
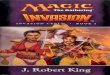
on the growth of cancer cells. According to [5,27], relatively high pHi fosters cell division and provides resistance to cellapoptosis. Hence (see [5]), higher pHi may cause a reentry of the cell into the mitotic phase or suppression of mitotic arrest.These features are incorporated by introducing a rate function (also termed proliferation or switching function) Λ1 for thedamped logistic growth above.

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 179
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.30 0.35 0.40 0.45 0.50Hi
Λ1(Hi)
Fig. 3. Cancer proliferation function as a function of Hi .
According to [28], low pHi activates DNase II3 which in turn leads to cell apoptosis. However, there seems to be alsoa positive correlation between (too) high pHi values and cell apoptosis [28]. Thus, though not true in every sense, it isinteresting to study the effect of Λ1 which takes positive values for all but toxic values of Hi. The form of the function isshown in Fig. 3. Since Λ1(Hi) ∈ R, for the negative part of Λ1(Hi) the influence of normal cell population is ignored. Thismeans that when Λ1(Hi) is negative only intra-species competition is prevalent, as a result the normal cell density has noinfluence during decay of cancer density. Consequently, the Lotka–Volterra reaction term is modified as in Eq. (6).
Cancer cells can spread through space and start affecting different areas of the tissue. For modeling cancer dispersalwithin a selected region of tissue we use a nonlinear operator of the form ∇ · (D2(C,N) · ∇). The diffusion coefficient ischosen to be inversely proportional to the normal cell density and the cancer cell density, since they act as obstacles andimpede each other’s movement:
D2(C,N) :=γ
1 +CN
KCKN
.
To complete the model we still need to describe the evolution of the normal cell density, which is supposed to decay duringthe tumor invasion. This decay, on the one hand, is directly proportional to the probability of the interaction between thetwo cell populations and, on the other hand, is accelerated by the increased acidity of the extracellular region. We introducea decay function Λ2 := log2.15(1 + He) to capture the influence of extracellular proton concentration. The rate of decay is amonotone function of He and is chosen in such a way that – qualitatively – the decay is slow and quantitatively Λ2(He) > 1,for all He > 1.15. In particular, Λ2(He) > 1 for He = 1.2 hence for pHe = 6.92081.
The growth term is ignored, since replication or regeneration of normal cells happen on a much larger time scale, thushaving nearly zero overall influence on the time scale of interest in this work. Hence, the equation characterizing thedynamics of normal cell density takes the form
∂tN = −ϱ2Λ2(He)CKC
NKN
, (7)
where ϱ2 denotes the death rate of normal cells. A detailed explanation for the choice of the functions and a detailedreasoning for all equations proposed above can be found in [29].
Now let I = (0, T ] ⊂ R+ be a finite time interval and D ⊂ Rd, d ∈ 1, 2, 3 be an open bounded spatial domain.Furthermore, let (Ω, A, P) be a complete probability space and let χ : I × Ω → S := R be a P-a.s. continuous real-valuedstochastic process. By At we denote the filtration generated by the processes χt and N denotes the system of all P-nullsetsthat are A0 measurable.
Then using the dimensionless identities in (95) and (96) and dropping the overhead lines therein we get for eachω ∈ Ω \ N the following non-dimensionalized system:
(SPDM)
∂tHi(ω) = −T (Hi,He) + S1 − Q (Hi) + F(χt(ω),Hi) in I × D
Hi(0, ω) = Hi,0(ω) in D (a)∂tHe(ω) = T (Hi,He) − S2He + 1He in I × D (b)He(0, ω) = He,0(ω), in D
∇He(ω) · n = 0 in ∈ I × ∂D
(8)
3 DNase stands for DeoxyriboNuclease, an enzyme that causes DNA fragmentation. DNase II is a type of DNasewhich becomes active in acidic conditions.

180 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
(CPDM)
∂tC(ω) = ϱ1Λ1(Hi)C
1 − ηC
CKC
− ϱ1Λ
+
1 (Hi)ηNCNKN
+ ∇ · (D(C,N)∇C) in I × D (a)
C(0, ω) = C0(ω) in D (b)∇C(ω) · n = 0 in I × ∂D
∂tN(ω) = −Λ2ϱ2CN in I × D (c)N(0, ω) = N0(ω) in D.
(9)
Thereby, SPDM stands for stochastic proton dynamics model and CPDM denotes the cell population dynamics model. Dueto the presence of the stochastic term in the microscopic equation (8)(a) and through the coupling with the rest of theequations, the result is a stochastic multiscale model (abbreviated as SMSM). Nonetheless, for fixed ω ∈ Ω \ N we havea deterministic system of equations, to which the standard theory of ODE and PDE is applicable. Next we prove the well-posedness of our model and finally perform numerical simulations to assess its qualitative behavior.
3. Analysis of the stochastic multiscale model
In this chapter we analyze the well posedness of the stochastic multiscale model for acid mediated cancer invasion. Theanalysis of (SPDM) and (CPDM) can be handled sequentially, since only the latter is coupled with the former and not theother way round. For simplicity of writing we denote
Notation 1.
R1(Hi,He) := −T (Hi,He) + S1 − Q (Hi), (10)R2(Hi,He) := T (Hi,He), (11)
R3(Hi, C,N) := ϱ1Λ1(Hi)C1 − ηC
CKC
− ϱ1Λ
+
1 (Hi)ηNCNKN
, (12)
R4(He, C,N) := −Λ2(He)CN, (13)
where T (Hi,He) is given in Eq. (5). (For notational convenience the growth rate ϱ1 and the decay rate ϱ2 are moved into thefunctions Λ1(Hi) and Λ2(H2), respectively.)
3.1. Preliminaries
Our first step here is to refine the probability space to accommodate only a.s. bounded processes.
3.1.1. Boundedness of the random component F2(χt) in the noise term F (see (2))
Definition 1 (ε-Acceptance Set). Let CF > 0 be a fixed constant. The set
G(ε) :=
Ω : P
sup
t∈[0,T ]
F2χt(Ω) > CF
< ε
is defined to be the ε-acceptance set.
Definition 2 (ε-Exception Set). The set
E(ε) := Ω \ G(ε)
is called the ε-exception set.
Further assume F2(χt) is a semi-martingale, i.e., it can be written as
F2(χt) = αt + χt , with χt =
t
0
−χs
T − sds
At
+ WtMt
, (14)
where Mt is a martingale, At is an adapted càdlàg process with (locally) bounded variation, and αt denotes some boundeddeterministic shifting. By Markov’s, Cauchy–Schwarz’s, and Doob’s martingale inequalities it follows that
P
supt∈[0,T ]
F2(χt) > CF
≤
T0
√E(χs)2
T−s ds + E(|WT |)
CF. (15)
It is important to note that on the set G(ε) it holds that F2(χt) ≤ CF with the probability 1−ε. As a result by choosing ε ≪ 1one can achieve ‘‘nearly’’ P-a.s. boundedness. This motivates us to exclude the exception set, E(ε), from Ω so that we can

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 181
obtain a.s. boundedness. Following this idea we define a (sub)probability space (Ωε, Aε, Pε), such that:
1. Ωϵ := Ω \ E(ε) is the new event space.2. Aε ⊂ A is the corresponding σ -algebra of Ωε .3. Pε ≪ P is the new probability measure which is absolutely continuous with respect to P. The requirement of absolute
continuity ensures the property that all P-null sets are also Pε-null sets.
This newprobability space now contains only those sample paths of the process (F2(χt))t∈[0,T ] that are Pε-a.s. bounded. Thusin this sense, we define Cε
F to be the uniform upper bound for the process (F2(χt))t∈[0,T ].
Lemma 3.1. For a given small exception probability ε such that 1 ≫ ε > 0 and T < ∞, if there exists a non-empty (sub)probability space (Ωε, Aε, Pε), then there exists a constant Cε
F < ∞ such that the process (F2(χt))t∈[0,T ], of the form (14),restricted to Ωε (denoted as (F ε
2 (χt))t∈[0,T ]) is Pε-a.s. uniformly bounded, i.e.
F ε2 (χt(ω)) ≤ Cε
F , ∀t ∈ [0, T ], ∀ω ∈ Ωε.
Proof. Clear from the construction procedure for (Ωε, Aε, Pε) illustrated above.
Remark 1. An immediate consequence is that the noise term F2(χt) := ϑ(αt + χt), with αt := a + (b − a) tT and χt := Bt ,
where
Bt =
t
0
−Bs
T − sds + Wt and Ba,b
t := αt + Bt
is a Pε-a.s. uniformly bounded process. Indeed, (Ba,bt )t is a semi-martingale. Since the Gaussian process Ba,b
t can be endowedwith a complete probability space (Ω, A, P), for any 0 < ε ≪ 1 one can extract a measurable space (Ωϵ, Ae) satisfyingthe above properties and endow it with a probability measure for e.g. Pε := P/P(Ωϵ) (just a renormalization of P). Thus theclaim follows by the above lemma.
Next we introduce the function spaces in which we expect our solution processes Hi, He, C and N to lie in.
3.1.2. Function spacesConsider Hi(t) and He(t) to be Hilbert space valued processes, i.e., Hi(t, ω) and He(t, ω) are functions in appropriate
Hilbert spaces. Moreover, we take the processes themselves to be in some Hilbert space. From this perspective we definethe following function spaces:
X :=
L2Ωϵ; H1,0
, ∥ · ∥X
; ∥u∥X :=
Eε(∥u(ω)∥2
H1,0) 1
2, (16)
Y :=
L2Ωϵ; H1,1
, ∥ · ∥Y
; Z :=
L2Ωϵ; H1,2
, ∥ · ∥Z
(17)
∥u∥Y :=
Eε(∥u(ω)∥2
L2(0,T ;H1(D))+ ∥∂tu(ω)∥2
L2(0,T ;L2(D))) 1
2,
∥u∥Z :=
Eε(∥u(ω)∥2
L2(0,T ;H2(D))+ ∥∂tu(ω)∥2
L2(0,T ;(H1(D))∗)) 1
2,
where
H1,0:=
u ∈ L2(0, T ; L2(D)), ∂tu ∈ L2(0, T ; L2(D))
,
H1,1:=
u ∈ L2(0, T ;H1(D)), ∂tu ∈ L2(0, T ; L2(D))
,
H1,2:=
u ∈ L2(0, T ;H2(D)), ∂tu ∈ L2(0, T ; (H1(D))∗)
.
The Bochner spaces L2(0, T ; L2(D)) (shortly LD,T ), L2(0, T ;H1(D)), L2(0, T ;H2(D)) and L2(0, T ; (H1(D))∗) are all endowedwith their respective standard norm. Finally, we also need the space
LΩ := L2Ωε; L2(0, T ; L2(D))
, ∥u∥LΩ
:=
Eε
∥u(ω)∥2
LD,T
12
.
Here Eε is the expectation operator on the refined probability space (Ωϵ, Aε, Pε).We want the solution Hi and N to Eqs. (8)(a) and (9)(c), respectively, to lie in the space X. This means that the processes
(Hi(t))t∈[0,T ] and (N(t))t∈[0,T ] lie in L2(Ωϵ) and take values in L2(D) for each fixed t ∈ [0, T ]. Moreover, due to the embedding

182 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
H1,0 → C(0, T ; L2(D)), Hi(t) and N(t) are continuous as functions of t ∈ [0, T ] if Hi(ω) ∈ H1,0 and N(ω) ∈ H1,0. Thus,Hi ∈ X and N ∈ X imply that, for almost all ω ∈ Ωϵ , the function Hi(t, ω) is continuous in L2(D) with respect to t ∈ [0, T ].
Similarly, we want the solutions He and C to Eqs. (8)(b) and (9)(b), respectively, to lie in the space Y and Z respec-tively. This means that the processes (He(t))t∈[0,T ] and (C(t))t∈[0,T ] take values in H1(D) and belong to L2(Ωϵ). More-over, He(t) and C(t) are weakly differentiable as functions of t ∈ [0, T ], i.e., He(ω) ∈ H1,1 and C(ω) ∈ H1,2. SinceH1,2, H1,1 → C([0, T ]; L2(D)), we notice that He ∈ Y and C ∈ Z implies that, for almost all ω ∈ Ωϵ , the functions He(t, ω)and C(t, ω) are continuous in L2(D) with respect to t ∈ [0, T ].
3.2. Analysis of the stochastic proton dynamics model (SPDM)
Prior to existence and uniqueness theorems, we make the following
Remark 2. • The reaction terms in (8)(a) and (b) are uniformly bounded and Lipschitz continuous.• From Lemma 3.1 the noise term F ε(χt ,Hi) := HiF ε
2 (χt) in (2) is Lipschitz continuous.
Moreover, the following result can be easily verified:
Lemma 3.2. For a fixed parameter vector Ξ the reaction terms R1Hi(t, x, ω),He(t, x, ω)
and R2
Hi(t, x, ω),He(t, x, ω)
in (10) and (11) are uniformly bounded for all t ∈ [0, T ], x ∈ D,ω ∈ Ωε . Hence for p ∈ [1, ∞], R1, R2 ∈ Lp
Ωε; Lp
[0, T ]×D
.
The main aim of this section is to show the existence of the weak solution to (SPDM) and prove its uniqueness. The ideais to find the pathwise weak solution of (SPDM), i.e., for each ω ∈ Ωϵ to find Hi(ω) ∈ H1,0 and He(ω) ∈ H1,1. From thisperspective, Eqs. (8)(a) and (b) are transformed into the following convenient form:
∂tHe(t, x, ω) − 1He = −S2He + R2(Hi,He) (18a)He(0, x, ω) = He,0(x, ω), for each x ∈ D, ω ∈ Ωϵ
ddt
Hi(t, x, ω) = R1(Hi,He) + HiF2(χt), for each x ∈ D, ω ∈ Ωϵ (18b)
Hi(0, x, ω) = Hi,0(x, ω).
In order to prove the uniqueness and existence of the pathwise weak solution we first construct a sequence of solutions andthen show that it converges in some appropriate sense. This will occupy the rest of this section.
3.2.1. Iterative construction of a solution sequence for (SPDM)We start constructing a sequence of weak solutions for Eqs. (8)(a) and (b). First we introduce some abbreviations.
Notation 2. Let Hme ∈ (Hm
e )m∈N∗ and Hmi ∈ (Hm
i )m∈N∗ . For the reaction term R1(Hmi ,Hm
e ) we use the short notation
Rm1 := R1(Hm
i ,Hme ), ∀m ∈ N∗
and for the reaction term R2(Hmi ,Hm−1
e ) we denote
Rm2 := R2(Hm
i ,Hm−1e ), ∀m ∈ N∗.
Approximate problem for (SPDM): Let (Hmi (ω))m≥0 ⊂ H1,0 be such that for each x ∈ D and ω ∈ Ωε
ddt
H0i (t) = R1(Hi,0,He,0) + H0
i Fε2 (χt)
ddt
Hmi (t) = Rm−1
1 (t) + Hmi F ε
2 (χt) a.e. x ∈ D, m ≥ 1 (19)
Hmi (0, x, ω) = Hi,0(x, ω), for each x ∈ D, ω ∈ Ωϵ .
Let (Hme (ω))m≥0 ⊂ H1,1 be the weak solution of
∂tH0e − 1H0
e = −S2H0e + R2(H0
i ,He,0)
∂tHme − 1Hm
e = −S2Hme + Rm
2 , a.e. x ∈ D, m ≥ 1 (20)Hm
e (0, x, ω) = He,0(x, ω), for each x ∈ D, ω ∈ Ωϵ .
Nowwe show that for almost all ω ∈ Ωϵ and for each (not just almost all) fixed x ∈ D, the function Hmi (t) is the solution to
the correspondingmth equation (19).

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 183
Lemma 3.3. For a.e. ω ∈ Ωϵ and for each x ∈ D, if there exists T < ∞ such that Hm−1e (ω) ∈ H1,1 uniquely solves (20) and if
Hi,0(ω) ∈ L2(D), then there exists Hmi ∈ X (m ≥ 1) such that for each ω ∈ Ωϵ the function Hm
i (ω) ∈ H1,0 solves uniquely thecorresponding mth equation (19).
Proof. Let m ≥ 1. Since F2(χt) is Pε-a.s. uniformly bounded and we assume the existence of the function Hm−1e , i.e., the
unique solution to Eq. (20), we get that for fixed ω ∈ Ωε, x ∈ D, Eqs. (19) define linear inhomogeneous initial valueproblems. Thus, the unique solution to themth equation is given by
Hmi (t) = e
t0 Fε
2 (χs)dsHi,0 +
t
0e−
s0 Fε
2 (χr )drRm−11 (s)ds
. (21)
More precisely, for each fixed x ∈ D and ω ∈ Ωε , we get
Hmi (t, x, ω) = e
t0 Fε
2 (χs)dsHi,0(x) +
t
0e−
s0 Fε
2 (χr )drRm−11 (s, x, ω)ds
.
Moreover, because of uniform boundedness of the reaction term R1 we get
|Hmi (t, x, ω)| ≤ e
t0 Fε
2 (χs)dsHi,0 +
t
0e−
s0 Fε
2 (χr )drRm−11 (s, x, ω)ds
≤ eC
εF t |Hi,0(x)| + eC
εF t |CR1 t|, ∀x ∈ D, ω ∈ Ωϵ
with CR1 denoting the bound for R1.Similarly, for each x ∈ D and almost all ω ∈ Ωε , we get that
|∂tHmi (t, x, ω)| = |Rm−1
1 + Hmi (t, x, ω)F ε
2 (χt)| ≤ CR1 + Hmi (t, ·, ω)Cε
F , ∀t ∈ [0, T ],
hence
|∂t(Hmi )| ≤ |CR1 + Cε
FHmi |.
As Hi,0 ∈ L2(D), we get upon integrating
∥Hmi (ω)∥2
LD,T≤ 2Te2C
εF T∥Hi,0∥
2L2(D)
+ 2e2CεF TC2
R1T2|D|
2 < ∞ (22)
and
∥∂tHmi (ω)∥2
LD,T≤ 2TC2
R1 |D|2+ 2(Cε
F )2∥Hm
i (ω)∥2LD,T
< ∞. (23)
From (22) and (23) we obtain
∥Hmi (ω)∥2
H1,0 ≤ ∥Hmi (ω)∥2
LD,T+ ∥∂tHm
i (ω)∥2LD,T
≤ 21 + 2(Cε
F )2Te2C
εF T∥Hi,0∥
2L2(D)
+ C2R1T |D|
2
+ 2TC2R1 |D|
2.
Taking the expectation Eε we get
∥Hmi ∥
2X ≤ 2T
(1 + (Cε
F )2)e2C
εF T∥Hi,0∥
2LΩ,D
+ C2R T |D|
2
+ C2R |D|
2
, (24)
hence we obtain Hmi ∈ X, such that for almost all ω ∈ Ωϵ , it is Hm
i (ω) ∈ H1,0. Moreover, for each x ∈ D fixed, Hmi (t, x, ω)
uniquely solves the correspondingm-th equation (19).
Observe that with a similar argument (under even less restrictive conditions) it can be shown that H0i (t, x, ω) exists as a
(unique) solution to the first equation in (19) (withm = 0). Moreover, H0e (t, x, ω) obviously exists as a (unique) solution to
the first equation in (20). These facts allow us to start the following induction procedure:
• Start with H0i , H
0e .
• For m ≥ 1 assume Hmi ∈ H1,0 solves (19), which implies (due to Lemma 3.4 below) the existence of a unique Hm
e ∈ H1,1
solving (20).• Use Hm
e found above to prove the existence of Hm+1i satisfying (19) form m + 1, followed by the existence of Hm+1
e assolution to (20).
Now we can consider Eq. (20) in general form ∈ N.

184 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Lemma 3.4. If for each ω ∈ Ωε , He,0 ∈ H1(D), then there exists some T > 0 such that Hme (ω) as an element of H1,1 uniquely
solves the corresponding mth equation (20). Furthermore, Hme ∈ Y and it satisfies the following inequality:
∥Hme ∥
2L2(0,T ;H1(D))
+ ∥∂tHme ∥
2LD,T
≤ q1∥Rm2 (ω)∥2
LD,T+ q2∥He,0∥
2H1(D)
,
∥Hme ∥
2Y ≤ q1∥Rm
2 ∥2LΩ
+ q2∥He,0∥2L2(Ωϵ ;H1(D))
,
where q1 := 1 +
1 + cϵ
TeS2T , q2 := q1 and
L2Ωϵ;H1(D)
:=
u ∈ L2(Ωϵ) such that u(ω) ∈ H1(D) a.e. ω ∈ Ωϵ
.
Proof. The proof is obtained by following the lines of Theorem 7.1.1 in [30]. A detailed proof involving similar argumentswill be presented during the existence and uniqueness proof for (CPDM) (in particular for the solution of (9)(b)).
Remark 3. We note here that one can actually even get higher regularity for Hme . For ∂D ∈ C2 and He,0 ∈ W 2,p(D) with
p > d+ 2, since Rm2 ∈ L∞(0, T ; L∞(D)) (see Lemma 3.2) we can apply Theorem 9.1 (Chapter 4 of [31]) and get that for each
ω ∈ Ωϵ ,
Hme (ω) ∈ W (p, T , D) :=
u ∈ Lp(0, T ;W 2,p(D)) : ∂tu ∈ Lp(0, T ; Lp(D))
.
Moreover, Hme satisfies the following inequality:
∥Hme ∥W (p,T ,D) ≤ c(|D|, T , p)
∥Rm
2 ∥L∞(D) + ∥He,0∥W2,p(D)
.
Thus we get that (Hme )m∈N∗ is a bounded sequence inW (p, T , D). Hence there exists a subsequence (H
mje )j ⊂ (Hm
e )m∈N∗ suchthat
Hmje
j→∞
He in Lp0, T ;W 2,p(D)
∂tH
mje
j→∞
∂tHe in Lp0, T ; Lp(D)
.
Moreover, due to the Sobolev embedding W 2,p(D) →→ Lp(D) →→ L2(D) we can apply the Lions–Aubin embeddingtheorem to getW (p, T , D) →→ Lp
0, T ; Lp(D)
→ L2(0, T ; L2(D)).
Hence the subsequence (Hmje )j∈N ⊂ W (p, T , D) converges strongly in Lp
0, T ; Lp(D)
and L2(0, T ; L2(D)).
For ease of notation, in the L2(0, T ; L2(D)) convergence proof below we shall ignore the subscript j and just refer thesubsequence by (Hm
e )m∈N∗ itself.Finally, we get that the limit He(ω) ∈ W (p, T , D) ∩ H1,1, for each ω ∈ Ωϵ . This in turn gives us that
He(ω) ∈ C1,0([0, T ] × D) and ∇He(ω) ∈ C([0, T ] × D).
In particular the uniform continuity of ∇He(ω) is used later in the proof of the H2(D) regularity for the solution to (CPDM).
Next we are concerned with the existence of the solution sequences (Hmi )m∈N ⊂ X and (Hm
e )m∈N ⊂ Y.
Theorem 3.5. Let CεF be such that F ε
2 (χt) satisfies Lemma 3.1. Then for each ω ∈ Ωε and m ∈ N∗ we have that Hmi (ω) ∈ H1,0
solves uniquely the mth equation specified by (19) and Hme (ω) ∈ H1,1 solves uniquely the mth equation specified by (20).
Furthermore, the sequences (Hmi )m∈N ⊂ X and (Hm
e )m∈N ⊂ Y.
Proof. Follows from Lemmas 3.3, 3.4, and the induction procedure.
3.2.2. Existence and uniqueness of the solution to (SPDM)Consider (Hm
e )m∈N ⊂ Y, such that for fixed ω ∈ Ωϵ ,
Hme (ω) := (Hm
e (ω))m∈N ⊂ H1,1 (25)
denotes the sequence of solutions to the correspondingmth equation specified by (20).Similarly, consider (Hm
i )m∈N ⊂ X, such that for fixed ω ∈ Ωϵ ,
Hmi (ω) := (Hm
i (ω))m∈N ⊂ H1,0 (26)
denotes the sequence of solutions to the correspondingmth equation specified by (19).

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 185
Next we collect some estimates for the terms in the sequence Hme .
Lemma 3.6. For each fixed ω ∈ Ωε , let Hme , Hn
e be any two elements of the sequence (Hme )m (see (25)). Then the following
inequality holds:
∥Hne (ω) − Hm
e (ω)∥2L2(0,T ;H1(D))
+ ∥∂tHne (ω) − ∂tHm
e (ω)∥2LD,T
≤ Q 1He
∥Hni (ω) − Hm
i (ω)∥2LD,T
+ Q 2He
∥Hn−1e (ω) − Hm−1
e (ω)∥2LD,T
.
By taking the Eε expectation this leads to
∥Hne − Hm
e ∥2Y ≤ Q 1
He∥Hn
i − Hmi ∥
2LΩ
+ Q 2He
∥Hn−1e − Hm−1
e ∥2LΩ
where
Q 1He
:= q1(T )C2Hi
, Q 2He
:= q1(T )C2He
, and q1(T ) := 1 +
1 +
2ϵ
TeS2T
are constants for all fixed 0 < T < ∞.
Proof. Eq. (20) applied to the differenceWm,ne := Hm
e − Hne results in
∂tWm,ne − 1Wm,n
e + S2Wm,ne = Rm
2 − Rn2.
Thus the inequality of Lemma 3.4 can be applied toWm,ne . Consequently, withWm,n
e,0 = 0 we get
∥Hme (ω) − Hn
e (ω)∥2L2(0,T ;H1(D))
+ ∥∂tHne (ω) − ∂tHm
e (ω)∥2LD,T
≤ q1∥Rm2 − Rn
2∥2LD,T
.
Applying the Lipschitz continuity of the reaction term R2 (see Remark 2) we get
∥Hme (ω) − Hn
e (ω)∥2L2(0,T ;H1(D))
+ ∥∂tHne (ω) − ∂tHm
e (ω)∥2LD,T
≤ q1C2Hi
∥Hni (ω) − Hm
i (ω)∥2LD,T
+ C2He
∥Hn−1e (ω) − Hm−1
e (ω)∥2LD,T
= Q 1
He∥Hn
i (ω) − Hmi (ω)∥2
LD,T+ Q 2
He∥Hn−1
e (ω) − Hm−1e (ω)∥2
LD,T.
By taking the Eε expectation it follows that
∥Hne − Hm
e ∥2Y ≤ Q 1
He∥Hn
i − Hmi ∥
2LD,T
+ Q 2He
∥Hn−1e − Hm−1
e ∥2LD,T
.
Lemma 3.7. Let Hne ,H
me be any two arbitrary terms of the sequence (Hm
e )m. Then it holds that
∥Hne (ω) − Hm
e (ω)∥2LD,T
≤ Q 3He
∥Hni (ω) − Hm
i (ω)∥2LD,T
+ Q 4He
∥Hn−1e (ω) − Hm−1
e (ω)∥2LD,T
,
∥Hne − Hm
e ∥2LΩ
≤ Q 3He
∥Hni − Hm
i ∥2LΩ
+ Q 4He
∥Hn−1e − Hm−1
e ∥2LΩ
, (27)
where
Q 3He
:= TeTC2Hi
and Q 4He
:= TeTC2He
are constants for all fixed 0 < T < ∞.
Proof. From (20) we have that for a.e. ω ∈ ΩεD
∂t(Hne − Hm
e )φdx +
D
∇(Hne − Hm
e )φdx +
D
S2(Hne − Hm
e )φdx =
D
(Rn2 − Rm
2 )φdx ∀φ ∈ H1(D).
In particular, for φ = Hne − Hm
e we get
12
ddt
∥Hne − Hm
e ∥2L2(D)
+ ∥∇(Hne − Hm
e )∥2L2(D)
+ S2∥Hne − Hm
e ∥2L2(D)
=
D
(Rn2 − Rm
2 )(Hne − Hm
e )dx,
from which
ddt
∥Hne − Hm
e ∥2L2(D)
≤ ∥Rn2 − Rm
2 ∥2L2(D)
+ ∥Hne − Hm
e ∥2L2(D)
(28)
and hence by integrating with respect to t and using the properties of R2
supt∈[0,T ]
∥Hne − Hm
e ∥2L2(D)
≤ eTC2Hi
∥Hni − Hm
i ∥2LD,T
+ C2He
∥Hne − Hm
e ∥2LD,T
.

186 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Thus, by integrating with respect to t and taking the Eε expectation
∥Hne − Hm
e ∥2LD,T
≤ TeTC2Hi
∥Hni − Hm
i ∥2LD,T
+ C2He
∥Hn−1e − Hm−1
e ∥2LD,T
(29)
∥Hne − Hm
e ∥2LΩ
≤ TeTC2Hi
∥Hni − Hm
i ∥2LΩ
+ C2He
∥Hn−1e − Hm−1
e ∥2LΩ
,
which proves the claim.
Lemma 3.8. Let Hni , H
mi be any two elements of the sequence (Hm
i )m. Then the difference Hni − Hm
i satisfies the followinginequalities:
∥Hni (ω) − Hm
i (ω)∥2LD,T
≤ Q 3Hi
∥Hn−1i (ω) − Hm−1
i (ω)∥2LD,T
+ Q 4Hi
∥Hn−1e (ω) − Hm−1
e (ω)∥2LD,T
∥Hni − Hm
i ∥2LΩ
≤ Q 3Hi
∥Hn−1i − Hm−1
i ∥2LΩ
+ Q 4Hi
∥Hn−1e − Hm−1
e ∥2LΩ
and
∥Hni (ω) − Hm
i (ω)∥2H1,0 ≤ Q 1
Hi∥Hn−1
i (ω) − Hm−1i (ω)∥2
LD,T+ Q 2
Hi∥Hn−1
e (ω) − Hm−1e (ω)∥2
LD,T,
∥Hni − Hm
i ∥2X ≤ Q 1
Hi∥Hn−1
i − Hm−1i ∥
2L∞
Ω+ Q 2
Hi∥Hn−1
e − Hm−1e ∥
2LΩ
, (30)
where
r1 := e4T2(Cε
F )2 , Q 3Hi
:= 4Tr1C2Hi
, Q 4Hi
:= 4Tr1C2He
,
Q 1Hi
:= 41 + (Cε
F )2Q 3Hi
+ 4C2Hi
, Q 2Hi
:= 41 + (Cε
F )2Q 4Hi
+ 4C2He
are constants and T > 0 is the right end of a fixed time interval [0, T ].
Proof. Since the elements of the sequence (Hmi (ω))m are solutions to the respectivemth equation specified by (19), for each
fixed x ∈ D and a.e. ω ∈ Ωε we have that
|Hni (t, x, ω) − Hm
i (t, x, ω)| =
t
0(Rn−1
1 − Rm−11 )dt +
t
0F ε2 (χt)(Hn
i − Hmi )dt
,from which, by using the Lipschitz continuity of the reaction term R1 (see Remark 2), we get
|Hni − Hm
i | ≤
t
0
CHi |H
n−1i − Hm−1
i | + CHe |Hn−1e − Hm−1
e | + CεF |H
ni − Hm
i |
dt,
from which
|Hni − Hm
i |2
≤ a(T ) + 4T (CεF )
2 t
0|Hn
i − Hmi |
2 dt,
where
a(T ) := 4 T
0C2Hi
|Hn−1i − Hm−1
i |2dt + 4
T
0C2He
|Hn−1e − Hm−1
e |2dt.
Applying Gronwall’s inequality and integrating with respect to x it follows
∥Hni − Hm
i ∥2L2(D)
≤
e4T (Cε
F )2T
D
a(T )dx.
This implies
∥Hni − Hm
i ∥2L2(D)
≤ 4r1C2Hi
∥Hn−1i − Hm−1
i ∥2LD,T
+ 4r1C2He
∥Hn−1e − Hm−1
e ∥2LD,T
,
hence
∥Hni − Hm
i ∥2LD,T
≤ 4r1TC2Hi
∥Hn−1i − Hm−1
i ∥2LD,T
+ C2He
∥Hn−1e − Hm−1
e ∥2L2(0,T ;L2(D))
= Q 3
Hi∥Hn−1
i − Hm−1i ∥
2LD,T
+ Q 4Hi
∥Hn−1e − Hm−1
e ∥2LD,T
(31)
with r1 := exp(4T 2(CεF )
2), Q 3Hi
:= 4Tr1C2Hi, Q 4
Hi:= 4Tr1C2
He.

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 187
For each fixed x ∈ D and ω ∈ Ωϵ the derivative can be estimated in a similar way to yield:
∥∂t(Hni − Hm
i )∥2LD,T
≤ 4C2Hi
∥Hn−1i − Hm−1
i ∥2LD,T
+ 4C2He
∥Hn−1e − Hm−1
e ∥2LD,T
+ 4(CεF )
2∥Hn
i − Hmi ∥
2LD,T
.
Substituting (31) in the above equation results in
≤
4(Cε
F )2Q 3
Hi+ 4C2
Hi
∥Hn−1
i − Hm−1i ∥
2LD,T
+
4(Cε
F )2Q 4
Hi+ 4C2
He
∥Hn−1
e − Hm−1e ∥
2LD,T
.
Altogether, we have that
∥Hni − Hm
i ∥2H1,0 ≤ ∥Hn
i − Hmi ∥
2LD,T
+ ∥∂tHni − Hm
i ∥2LD,T
≤ Q 1Hi
∥Hn−1i − Hm−1
i ∥2LD,T
+ Q 2Hi
∥Hn−1e − Hm−1
e ∥2LD,T
with
Q 1Hi
:= 41 + (Cε
F )2Q 3Hi
+ 4C2Hi
and Q 2Hi
:= 41 + (Cε
F )2Q 4Hi
+ 4C2He
.
The last two inequalities prove the claim.
The immediate consequence of Lemmas 3.7 and 3.8 is the following sufficient condition for the convergence of thesequence (Hm
i ,Hme ) in X × Y.
Lemma 3.9 (SPDM Time Condition). For the sequence (Hmi (ω),Hm
e (ω))m to be a Cauchy sequence in H1,0× H1,1, the time T has
to fulfill the following condition:
(TSPDM)
τ1 := sup
τ : τ
4e4τ
2(CεF )2C2
Hi+ eτC2
Hi
< 1
τ2 := sup
τ : τ
4e4τ
2(CεF )2C2
He+ eτC2
He
< 1
T = minτ1, τ2.
(32)
Proof. Since for a fixed T > 0 the constants Q 1Hi, Q 2
Hi, Q 1
Heand Q 2
Heoccurring in Lemmas 3.7 and 3.8, respectively, are all
bounded, we get that the sequence (Hmi ,Hm
e ) converges in X × Y if and only if (Hmi ,Hm
e ) converges in LΩ × LΩ . Hence it issufficient to find a condition for the latter.
∥Hni − Hm
i ∥2LΩ
+ ∥Hne − Hm
e ∥LΩ≤ (Q 3
Hi+ Q 3
He)∥Hn−1
i (ω) − Hm−1i (ω)∥2
LΩ
+ (Q 4Hi
+ Q 4He
)∥Hn−1e (ω) − Hm−1
e (ω)∥2LΩ
with Q 3Hi
:= 4Te4T2(Cε
F )2C2Hi, Q 3
He:= TeTC2
Hi, Q 4
Hi:= 4Te4T
2(CεF )2C2
He, and Q 4
He:= TeTC2
He. Consequently, we have the condition
(TSPDM) for the time T .
Finally, we are in a position to formulate the existence theorem.
Theorem 3.10. For each parameter vector Ξ , there exists a time interval [0, T ) with T > 0 satisfying the time condition (TSPDM)(see (32)), such that (SPDM) has a unique weak solution Hi(t, x, ω), He(t, x, ω) for almost every ω ∈ Ωϵ . Furthermore Hi(·, ·, ω)and He(·, ·, ω) are the sample paths of the processes (Hi(t))t∈[0,T ] ∈ X and (He(t))t∈[0,T ] ∈ Y, and these processes are a.s. uniquein X and Y, respectively.
In addition, if D ⊂ Rd with ∂D being C2 and He,0(ω) ∈ W 2,p(D) with p > d + 2, then (due to Remark 3) He ∈ W (p, T , D).
Proof. From Lemma 3.9 we have that (Hmi (ω),Hm
e (ω))m is a Cauchy sequence in H1,0× H1,1, thus it converges to a unique
element (Hi(ω),He(ω)) in H1,0× H1,1 for a.e. ω ∈ Ωϵ . Then by dominated convergence we obtain that (Hm
i ,Hme ) converges
to (Hi,He) in X × Y.For uniqueness let Hi,1,Hi,2 ∈ X be such that almost every corresponding sample path is a weak solution to (8)(a). Then
for a fixed ω ∈ Ωϵ we obtain ∥Hi,1 − Hi,2∥2LΩ
= 0 by employing the usual estimates and taking the Eε expectation and dueto the Lipschitz continuity of R1. Therefore, Hi,1,Hi,2 ∈ X are a.s. identical in LΩ . Now from the estimate (30) in Lemma 3.8,the uniqueness of He in LΩ (shown below) and since X ⊂ LΩ , we can conclude that Hi,1 and Hi,2 are also a.s. identical in X.
For the uniqueness of He ∈ Y, let He,1,He,2 ∈ X be such that almost every sample path is a weak solution to (8)(b).Then for every fixed ω ∈ Ωϵ and due to the Lipschitz continuity of R2 we obtain in the usual way (after also taking the Eε
expectation) that ∥He,1 − He,2∥2LΩ
= 0. Hence He,1,He,2 ∈ Y are a.s. identical in LΩ . Moreover, due to (27), the uniquenessof Hi in LΩ and the fact that Y ⊂ LΩ we can conclude that He,1 and He,2 are also a.s. identical in Y.

188 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
3.2.3. Measurability of the solution to (SPDM)Now we show that the processes Hi ∈ X and He ∈ Y are adapted to the filtration Aε
t generated by the noise processF ε2 (χt)
t∈[0,T ]
, with T satisfying the condition (32).
Lemma 3.11. Let t ∈ [0, T ] with T > 0 satisfying (32). If Hm−1i ∈ (Hm
i )m is an a.s. Aεt adapted process and Hm−1
e ∈ (Hme )m is
an Aεt adapted process, then Hm
i ∈ (Hmi )m is an a.s. Aε
t adapted process.
Proof. Let Hmi be an arbitrary element of the sequence (Hm
i )m. Due to Lemma 3.3, for each x ∈ D and almost all ω ∈ Ωϵ
ddt
Hmi (t) = R1(Hm−1
i ,Hm−1e ) + Hm
i (t)F ε2 (χt),
hence
Hmi (t) = exp
t
0F ε2 (χs)ds
Hi,0 +
t
0e−
ts Fε
2 (χr )drRm−11 (s)ds
.
Thus for every fixed x ∈ D and for almost all ω ∈ Ωϵ , Hmi (t) depends on Hm−1
i (s), Hm−1e (s), and F ε
2 (χs) for s ∈ [0, t]. So ifHm−1
i (t) and Hm−1e (t) are Aε
t measurable then so is Hmi (t). Since this holds for each x ∈ D and almost all ω ∈ Ωϵ , we find
that Hmi ∈ X is a.s. an Aε
t adapted process.
In particular, we readily see that H0i is an a.s. Aε
t an adapted process, since it solves the linear inhomogeneous equationit satisfies. This indicates us to invoke the induction procedure so that the a.s. Aε
t adaptability of an arbitrary processHm
e ∈ (Hme )m can be obtained by assuming that Hm
i and Hm−1e are a.s. Aε
t adapted processes. Next lemma verifies the latterhalf of the previous statement.
Lemma 3.12. Let t ∈ [0, T ] with T > 0 satisfying (32). If Hmi ∈ (Hm
i )m is an a.s. Aεt adapted process and Hm−1
e ∈ (Hme )m is an
Aεt adapted process, then Hm
e ∈ (Hme )m is an a.s. Aε
t adapted process.
Proof. By the hypothesis it follows that Hmi (t), Hm−1
e (t) are Aεt measurable, for t ∈ [0, T ] and T satisfying (32). Recalling
Eq. (20) form ∈ N0 we have thatD
Hme φdx +
D
∇Hme · ∇φdx + S2
D
Hme φdx = R2(Hm
i ,Hm−1e ), ∀φ ∈ H1(D).
For fixed ω ∈ Ωϵ , the function Hme (ω) ∈ H1
[0, T ];H1(D)
can be written as
Hme (t, x, ω) :=
∞k=0
dmk (t, ω)wk(x),∞k=0
|dmk (t, ω)|2 < ∞ (33)
where (wk)k∈N0 is a complete orthogonal basis of the Hilbert space H1(D).Due to the embedding H1
⊂ L2 ⊂ (H1(D))∗, the function (Hme )′(t) ∈ (H1(D))∗ ∩ L2(D) can also be characterized by
using the same (now orthonormal) basis in L2 as
(Hme )′(t, x, ω) :=
∞k=0
(dmk )′(t, ω)wk(x),∞k=0
|(dmk )′(t, ω)|2 < ∞. (34)
By the same argument we can represent R2(Xm, Ym−1) as
Rm2 (t, x, ω) :=
∞k=0
f m,m−1k (t, ω)wk(x),
∞k=0
|f m,m−1k (t, ω)|2 < ∞. (35)
Using this representation for Hme (ω), we get the following equation:
∞j=0
(dmj )′(t)
D
wj(x)φdx +
∞j=0
dmj (t)
D
∇wj(x) · ∇φdx + S2∞j=0
dmj (t)
D
wj(x)φdx
=
∞j=0
f m,m−1j (t)
D
wj(x)φdx. (36)

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 189
In particular for φ = wk we get
(dmk )′(t) +
∞j=0
dmj (t)
D
∇wj(x) · ∇wk(x)dx + S2dmk (t) = f m,m−1k (t). (37)
Define aj,k =
D∇wj · ∇wkdx; then we get
(dmk )′(t) +
∞j=0
dmj (t)aj,k + S2dmk (t) = f m,m−1k (t). (38)
Since
|(dmk )′(t)| = |(Hm
e )′(t), wk| < ∞ and |dmk (t)| = |(Hm
e (t), wk)| < ∞
and
|(Rm,m−12 (t), wk)| < ∞,
we get that ∞j=0
dmj (t)aj,k
= |f m,m−1k (t) − (dmk )′(t) − S2dmk (t)| < ∞.
Thus Eq. (38) with infinite sum makes sense and we can represent the solution using the exponential of a matrix.Let dm
= (dm0 , . . . , dmk , . . .)T , fm,m−1= (f m,m−1
0 , . . . , f m,m−1k , . . .)T , k ∈ N, and A = ((ai,j)i,j∈N), then (38) can be
represented in vector form as:
(dm)′(t) = −(A + S2I)dm(t) + fm,m−1(t),
whose solution is given as
dm(t) = e−(A+S2I)tdm(0) +
t
0e(A+S2I)s
fm,m−1(s)
ds.
This implies that each dmk (t) depends on f m,m−1k (s), s ∈ [0, t]. Consequently, Hm
e (t) also depends on f m,m−1k (s), s ∈ [0, t]
for almost all ω ∈ Ωϵ . Because R2(Hmi ,Hm−1
e ) is a smooth function of Hmi ,Hm−1
e it is also an Aεt -adapted process. Since the
pathwise characterization (35) preserves this property, we can conclude that Hme (t) ∈ Y is an a.s. Aε
t adapted process.
Combining Lemmas 3.11 and 3.12 along with the induction argument, we get that the elements of the sequence (Hmi )m,
(Hme )m are a.s. Aε
t -adapted processes. Thus, the corresponding limit processes Hi ∈ X and He ∈ Y are also a.s. Aεt adapted.
3.2.4. Uniform boundedness of the solution to (SPDM)In this section we prove the boundedness and nonnegativity of the solutions to (SPDM), which will be used in the proof
for the well posedness of the macroscopic model.
Theorem 3.13. Let T > 0 be the maximum time value satisfying the time condition TSPDM (see (32) below). Then for everyparameter vector Ξ there exists a time T > 0 such that for
T := min(T , T ), (39)
the solution sequences (Hmi )m and (Hm
e )m are uniformly bounded with the following upper and lower bounds:
1. If Hmi (0, x, ω) ≥ 0 ∀x ∈ D then for each m ∈ N
0 ≤ Hmi (t, x, ω) ≤ CHi(T ) ∀x ∈ D, t ∈ [0, T ), ω ∈ Ωϵ (40)
CHi(T ) := eCεF Tsupx∈D
Hi,0(x) + CR1T.
2. If Hme (0, x, ω) ≥ 0 ∀x ∈ D then for each m ∈ N
cHe(T ) ≤ Hme (t, x, ω) ≤ CHe(T ) ∀x ∈ D, t ∈ [0, T ), ω ∈ Ωϵ (41)
cHe(T ) := ae−b1T , CHe(T ) := eb1T ,
where the constants b1 and b2 will be specified in the proof.

190 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Proof. Let Hme ∈ (Hm
e )m and Hmi ∈ (Hm
i )m. Observe that the assertions are obviously verified for H0i and H0
e . Consider theequation
∂tHmi (t) = Rm−1
1 (t) + F(χt ,Hmi ),
with F(χt ,Hmi ) = Hm
i F ε2 (χt) andwhose solution is given as in (21). Assume that the assertions of the theorem hold forHm−1
iand Hm−1
e . Then they also hold for Hmi , by the estimates in Lemma 3.3 and the announced choice of CHi(T ).
Now consider the equation
∂tHme (t, x, ω) = Rm
2 − S2Hme + 1Hm
e .
For each fixed ω ∈ Ωϵ , let Hme (t, x) := Hm
e (t, x) − ae−b1t . Then
∂t Hme − 1Hm
e + S2Hme = Rm
2 + ae−b1t(q − S2)
≥ qR2 + ae−b1t(b1 − S2), since Rm2 ≥ qR2 with 0 > qR2
= a(qe−(b1+S2)t − 1) with a := |qR2 |, b1 = b1 − S2.
For each q > 1 there exists T > 0 such that
b1e−(b1+S2)T > 1. (42)
Therefore,
∂t Hme − 1Hm
e + S2Hme ≥ 0 ∀t ∈ [0, T ).
So if He,0 ≥ ae−b1t then Hme (0, x) ≥ 0, hence e.g., from the nonnegativity theorem in [32] we get that Hm
e (t, x) ≥ 0 for allt ∈ [0, T ), x ∈ D. This in turn implies that for
T := min(T , T ).
Hme (t, x) ≥ cHe(T ) for all t ∈ [0, T ), x ∈ D, and ω ∈ Ωϵ , with cHe(T ) := ae−qT .Now for each fixed ω ∈ Ωϵ , let
Hme (t, x) := eb2t − Hm
e (t, x),
then
∂t Hme − 1Hm
e + S2Hme = b2eb2t + S2eb2t − Rm
2
≥ eb2t(S2 + b2) − QR2 ,
since Rm2 ≤ QR2 with QR2 > 0. Thus, for b2 ≥ QR2 it follows that
∂t Hme − 1Hm
e + S2Hme ≥ 0, ∀t ∈ [0, T ), x ∈ D, ω ∈ Ωϵ .
Hence, once again by the nonnegativity theorem in [32] we get Hme (t, x) ≥ 0 for all t ∈ [0, T ) and x ∈ D. This in turn
implies that Hme (t, x) ≤ CHe(T ) := eb2T for all t ∈ [0, T ) and x ∈ D. (Take b2 > max1+ S2,QR2.) Altogether we obtain that
0 ≤ Hme (t, x, ω) ≤ CHe(T ) ∀t ∈ [0, T ), x ∈ D, ω ∈ Ωϵ .
This completes the proof for the uniform boundedness of the solutions to (SPDM). The next step is to analyze thewellposedness of CPDM. This shall be the topic of next section.
3.3. Analysis of the cell population dynamics model (CPDM)
The goal of this section is to prove the local existence of a unique solution to (CPDM), fromwhich we get a new conditionfor the maximum time interval [0, T ) for the existence of a unique solution to the full stochastic multiscale model.
The following lemma is directly obtained by applying Theorem 3.13.
Lemma 3.14 (Boundedness of Λ1, Λ2 and D). Let T > 0 satisfy the condition (39) and let C,N be non-negative and bounded.Then the proliferation (or switching) function Λ1(Hi), the decay function Λ2(He) and the diffusion coefficient D(C,N) areuniformly bounded:
0 ≤ Λ1(Hi) ≤ CΛ1 := ϱ1c3 exp(c1(1 + CHi)), (43)
0 ≤ Λ2(Hi) ≤ CΛ2 := ϱ2 log2.15(1 + CHe), (44)
0 < cD ≤ D(C,N) ≤ γ (45)
for all x ∈ D, t ∈ [0, T ], and ω ∈ Ωϵ .

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 191
3.3.1. Iterative solution sequence for (CPDM)We aim at finding the pathwise weak solution to (CPDM), that is for each ω ∈ Ωϵ find N(ω) ∈ H1,0 and C(ω) ∈ H1,2. For
that we rewrite Eqs. (9)(b) and (c) in the following convenient form:
∂tC(t, x, ω) = R3(Hi, C,N) + ∇ · (D(C,N)∇C) (46a)C(0, x, ω) = C0(x, ω) for each ω ∈ Ωϵ
∇C(t, x, ω) · n = 0 for each ω ∈ Ωϵ, x ∈ ∂D (46b)ddt
N(t, x, ω) = R4(He, C,N), for each x ∈ D, ω ∈ Ωϵ (46c)
N(0, x, ω) = N0(x, ω).
Analogous to the analysis of (SPDM), we first construct a sequence (Cm,Nm)m of solutions to
∂tCm= R3(Hi, Cm−1,Nm) + ∇ · (D(Cm−1,Nm)∇Cm) (m ≥ 1) (47a)
∂tC0= R3(Hi, C0,N0) + ∇ · (D(C0,N0)∇C0) (47b)
Cm(0, x, ω) = C0(x, ω) for each x ∈ D, ω ∈ Ωϵ (m ≥ 0)
∇Cm· n = 0 for each ω ∈ Ωϵ, x ∈ ∂D (m ≥ 0) (47c)
ddt
Nm(t, x, ω) = R4(He, Cm−1,Nm), (m ≥ 1) for each x ∈ D, ω ∈ Ωϵ (48)
ddt
N0(t, x, ω) = R4(He, C0,N0), (m ≥ 1) (49)
Nm(0, x, ω) = N0(x, ω), (m ≥ 0),
where we use
Notation 3.
Rm3 := R3(Hi, Cm−1,Nm), ∀m ≥ 1,
R03 := R3(Hi, C0,N0),
Rm4 := R4(He, Cm−1,Nm), ∀m ≥ 0,
Dm:= D(Cm−1,Nm), ∀m ≥ 1
and then show that the sequence converges in some appropriate sense. This will occupy the rest of the section.First we easily note that the function R3(Hi, C,N) is an element of LΩ :
Lemma 3.15. Let 0 < C(t, x, ω) ≤ CC (T ) and 0 < N(t, x, ω) ≤ CN , where CN and CC (T ) are as in Theorem 3.16. Then for anopen bounded domain D and a finite time T > 0
∥R3(Hi, C,N)∥LΩ< CR3 |D|T , (50)
where CR3 := CΛ1CC (1 + ηNCN + ηCCCCN).
Theorem 3.16. For each ω ∈ Ωϵ let (Hi(ω),He(ω)) be the unique weak solution to (SPDM) and let D ⊂ Rd with ∂D ∈ C2 andC0 ∈ W 2,p(D), N0 ∈ W 2,p(D) with p > d + 2 such that the uniform bounds 0 < C0 ≤ MC0 and 0 < N0 ≤ CN exist. Then,Cm(ω)
m∈N∗ ⊂ H1,2
∩W (p, T , D) is the sequence of unique weak solutions to the corresponding m equations (47a) and (47b),respectively, and
Nm(ω)
m∈N∗ ⊂ H1,0 is the sequence of unique solutions to the m equations (48). Moreover, these sequences
satisfy the following inequalities:
∥Nm∥2X ≤ (1 + C2
Λ2)∥N0∥
2L2(Ωϵ ;L2(D))
∀m ∈ N (51)
∥Cm∥2Z ≤ r5∥Rm
3 ∥2LΩ
+ r6∥C0∥2L2(Ωϵ ;H1(D))
∀m ∈ N (52)
with
r5 := q8 + q7 + 1, r6 := q9 + (q7 + 1)cD, q8 := q5 + (q6 + 1)q3,
q3 = q4 := TeT2
1 +
2cDϵ
, q9 := (q6 + 1)q4, r2 := cD + Te
T2
1 +
2cDϵ
,
r3 := 1 + TeT2
1 +
2cDϵ
, q7 = q5 :=
16C2f
c2D
, q6 :=
max
cD4
,2CdCf
cD
4cD
1cD
.

192 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Furthermore, if T > 0 is the time satisfying the condition (39) then there exists a time T with
T ≤ T , (53)
such that each Cm(ω) ∈Cm(ω)
m∈N∗ is uniformly bounded with
0 < Cm(t, x, ω) ≤ CC (T ), ∀m ∈ N∗, t ∈ [0, T ), x ∈ D, (54)CC (T ) := KC0 + exp(−T ) − exp(−b3T ) < KC0 + 1 KC , 0 < KC0 ≤ 1, b3 > 0,
and each Nm(ω) ∈Nm(ω)
m∈N∗ is uniformly bounded with
0 < Nm(t, x, ω) ≤ CN , ∀m ∈ N∗, t ∈ [0, T ), x ∈ D. (55)
Proof. Due to the iterative coupling of Eqs. (47a) (respectively (47b)) and (48), we use as before an induction argument toshow the existence of a sequence of uniqueness of their solutions.Induction start m = 0:The induction start is verified by performing the following steps:
1. Show that N0(x, t, ω) is uniformly bounded ∀x ∈ D, t ∈ [0, T ], ω ∈ Ωϵ .2. Observe that N0
∈ X is the unique solution to (48) form = 0.3. Show that C0(x, t, ω) is uniformly bounded ∀x ∈ D, t ∈ [0, T ], ω ∈ Ωϵ .4. Use steps 1–3 to show that C0
∈ Z is the unique solution to (47b).
Note that once the above steps are verified then due to Lemma 3.15 an analogous proof can be applied for the inductionstep, i.e., assume that the claim holds form and prove it form + 1.
For each x ∈ D and ω ∈ Ωϵ we have by (48) form = 0 that
N0(t, x, ω) = N0(x, ω) exp
−
t
0Λ2(He)C0(s, x, ω)ds
, (56)
from which immediately follows the bound (by the maximum principle C0 is nonnegative):
0 < N0(t, x, ω) ≤ CN ∀ω ∈ Ωϵ, x ∈ D, t ∈ [0, T ], (57)
as 0 < N0(x, ω) ≤ CN , and Λ2(He) ≥ 0 ∀t ∈ [0, T ], x ∈ D, ω ∈ Ωϵ .It is straightforward to verify that N0(ω) ∈ H1,0 for each ω ∈ Ωϵ and N0
∈ X. This completes steps 1 and 2.To ensure an upper bound for C0, consider Eq. (47b) and use the following auxiliary function (like in [11]):
ϱ0:= − exp(−qt) + exp(−t) + MC0 − C0.
Then
∂tϱ0− ∇ · (D(C0,N0)∇ϱ0) = b3 exp(−b3t) − exp(−t) − R0
3. (58)
Since C0(x) ≤ MC0 ∀x ∈ D by construction ϱ0(0, x) ≥ 0 ∀x ∈ D. Thus by choosing q > 0 such that
b3 exp(−b3t) ≥ exp(−t) + |R03| (59)
we can apply the non-negativity theorem in [32] to get that ϱ0(t, x) ≥ 0 ∀x ∈ D, ∀t ∈ (0, T ), T < ∞. This in turn impliesthat C0(t, x) ≤ CC (t) with
CC (t) := MC0 + exp(−t) − exp(−b3t) ≤ MC0 + 1 − exp(−b3T ) CC (T )
< MC0 + 1 MC
.
Moreover, from the non-negativity theorem in [32] it immediately follows that C0 > 0 for all x ∈ D and t ∈ (0, T ). Thiscompletes step 3.
For a.e. ω ∈ Ωϵ , let
C0n (t, x, ω) =
nk=0
dk(t, ω)wk(x),
where
wkk∈N∗ is an orthogonal basis of H1(D)

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 193
and
wkk∈N∗ is also an orthonormal basis of L2(D)
and dk(t, ω) are chosen such that
dk(0) = (C0, wk) and
ddt
C0n , wk
= (R0
3, wk) −
D
D(C0,N0)∇C0n∇wkdx. (60)
Also let us note that, since C0,N0 are uniformly bounded, Lemma 3.15 is applicable and hence the reaction term R03 ∈
L2(0, T ; L2(D)) for all ω ∈ Ωϵ .Now multiply the weak formulation (60) above with dk and sum. This leads to
12
ddt
∥C0n∥
2L2(D)
+ cD∥∇C0n∥
2L2(D)
≤ ∥R03∥L2(D)∥C
0n∥L2(D), (61)
from which by using Lemma 3.15 and Gronwall’s inequality we obtain the bound
∥C0n∥
2L2(D)
≤ eT2
∥C0∥
2L2(D)
+12∥R0
3∥2LD,T
≤ C(T , |D|)∥C0∥
2L2(D)
, (62)
with C(T , |D|) = eT/2(1 +12C
2R3
|D|2T 2).
For a sufficiently small ϵ > 0, we also get that for each t ∈ [0, T ]
12
ddt
∥C0n∥
2L2(D)
≤1ϵ∥C0
n∥2L2(D)
, hence ∥C0n∥
2L2(D)
≤ e2Tϵ ∥C0∥
2L2(D)
(63)
and
cD∥∇C0n∥
2L2(D)
≤1ϵ∥C0
n∥2L2(D)
−12
ddt
∥C0n∥
2L2(D)
< ∞. (64)
Integrating w.r.t. t leads to
∥∇C0n∥
2LD,T
≤2cDϵ
∥C0n∥
2LD,T
. (65)
Altogether, from (62) and (65) we get that
∥C0n∥
2L2(0,T ;H1(D))
≤ TeT2
∥C0∥
2H1(D)
+ ∥R03∥
2LD,T
1 +
2cDϵ
= q3∥R0
3∥2LD,T
+ q4∥C0∥2H1(D)
, (66)
where q3 := TeT2
1 +
2cDϵ
and q4 := q3.
Similarly, multiply the weak formulation (60) by d′
k and sum to obtain
⟨∂tC0n , ∂tC0
n ⟩ = (R03, ∂tC
0n ) − (D(C0,N0)∇C0
n , ∇∂tC0n ) (67)
∥∂tC0n∥
2L2(D)
+12cD
ddt
∥∇C0n∥
2L2(D)
≤12∥R0
3∥2L2(D)
+12∥∂tC0
n∥2L2(D)
∥∂tC0n∥
2L2(D)
+ cDddt
∥∇C0n∥
2L2(D)
≤ ∥R03∥
2L2(D)
(68)
from which by integration w.r.t. t we get
∥∂tC0n∥
2LD,T
+ cD∥∇C0n∥
2L2(D)
≤ ∥R03∥
2LD,T
+ cD∥C0∥2H1(D)
. (69)
Hence from (62), (66), (69) we obtain that
max0≤t≤T
∥C0n (t)∥2
L2(D)≤ eT/2
∥C0∥
2H1(D)
+12∥R0
3∥2LD,T
< ∞ (70)
∥C0n∥
2L2(0,T ;H1(D))
≤ q3∥R03∥
2LD,T
+ q4∥C0∥2H1(D)
< ∞
∥∂tC0n∥
2LD,T
≤ ∥R03∥
2LD,T
+ cD∥C0∥2H1(D)
< ∞ (71)
max0≤t≤T
∥∇C0n (t)∥2
L2(D)≤
1cD
∥R0
3∥2LD,T
+ cD∥C0∥2H1(D)
< ∞.

194 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Hence there exist some subsequences (C0mk
)k and (∂tC0mk
)k which converge weakly to C0∈ L2(0, T ;H1(D)) and (C0)′ ∈
L2(0, T ; L2(D)); it is easy to see that (C0)′ = ∂tC0.Altogether we have with the usual passage to limits in the corresponding weak formulations
∥C0∥2L2(0,T ;H1(D))
+ ∥∂tC0∥2LD,T
≤
cD + q4
∥C0∥
2H1(D)
+
1 + q3
∥R0
3∥2LD,T
≤ r3∥R03∥
2LD,T
+ r2∥C0∥2H1(D)
from which by taking the Eε-expectation we get
∥C0∥2Y ≤ r3∥R0
3∥2LΩ
+ r2∥C0∥2H1(D)
< ∞, (72)
where r3 := 1 + q3 = 1 + TeT2
1 +
2cDϵ
and r2 := cD + q4 = cD + Te
T2
1 +
2cDϵ
.
Remark 4. From the hypothesis we have that D ⊂ Rd, ∂D ∈ C2 and C0,N0 ∈ W 2,p(D) → C1(D) for p > d + 2. Also byRemark 3 we have that He ∈ W 2,p(D), hence N0(t) ∈ W 2,p(D). Thus we get that D(C0,N0(t)) ∈ W 2,p(D) for each t ∈ [0, T )and a.e. ω ∈ Ωϵ . This in turn implies that
D(C0,N0) ∈ C1([0, T ] × D), ∇D(C0,N0) ∈ C([0, T ] × D).
Since D(C0,N0) ∈ W (p, T , D) → L2p(0, T ;W 1,2p(D)) and ∇D0∈ L2p(0, T ; L2p(D)) (Lemma 3.3, Chapter 2 of [31]) we can
again apply Theorem 9.1 (Chapter 4 of [31]) to get that C0∈ W (p, T , D). We use this to claim the continuity ∇D(C0,N1).
Thus, the induction procedure yields the uniform continuity of ∇D(Cm−1,Nm).For the convergence of the sequence (Cm)m∈N∗ we use again the compact embedding W (p, T , D) →→
Lp(0, T ; Lp(D)) → L2(0, T ; L2(D)) (see Remark 3) and get that the subsequence (Cmj)j∈N converging weakly in W (p, T , D)
also converges strongly in Lp0, T ; Lp(D)
and L2(0, T ; L2(D)). However, for the ease of notation we ignore the subscript j
and still refer the subsequence (Cmj)j∈N as (Cm)m∈N∗ .
By the regularity theorem (Theorem 7.1.5) in [30] we get the following estimate for the H2 norm:
∥1C0∥2LD,T
≤ q5∥R03∥
2LD,T
+ q6∥C0∥2
L20,T ;H1(D)
+ q7∥∂tC0(ω)∥2LD,T
∥C0∥2
L20,T ;H1(D)
+ ∥1C0∥2LD,T
≤ q8∥R03∥
2LD,T
+ q9∥C0∥2H1(D)
+ q7∥∂tC0∥2LD,T
∥C0∥2
L20,T ;H2(D)
+ ∥∂tC0∥2LD,T
≤ r5∥R03∥
2LD,T
+ r6∥C0∥2H1(D)
where
q7 = q5 :=
16C2f
c2D
, q6 :=
max
cD4
,2CdCf
cD
4cD
, q8 := q5 + (q6 + 1)q3,
q9 := (q6 + 1)q4, r5 := q8 + q7 + 1, r6 := q9 + (q7 + 1)cD.
This completes the induction startm = 0.Induction step m: Assume that the claim holds for the mth term in the sequence and show that this also implies the claimfor them + 1st term.
The proof is exactly the same as for induction start, therefore it holds that Cm∈ Z and Nm
∈ X are the unique solutionsequence to the correspondingmth equations (48) and (47a), respectively.
3.3.2. Existence and uniqueness of the solution to (CPDM)We consider the sequence (Cm)m∈N∗ ⊂ Z, such that for fixed ω ∈ Ωϵ , the sequence (Cm(ω))m∈N∗ ⊂ H1,2 contains the
solutions to the correspondingmth equation specified by (47a).Similarly, we take (Nm)m∈N∗ ⊂ X, such that for fixed ω ∈ Ωϵ , the sequence (Nm(ω))m∈N∗ ⊂ H1,0 features the solutions
to the correspondingmth equation specified by (48).In order to prove the existence of a solution we need to show that the sequences (Cm)m and (Nm)m converge in Z and X,
respectively. To this end let us collect some inequalities. The following lemma is easily verified:
Lemma 3.17. Let Cn, Cm∈ (Cm)m and Nn,Nm
∈ (Nm)m be some arbitrary elements of the respective solution sequences. Thenthe following inequalities hold:
∥Rm3 − Rn
3∥2LΩ
≤ QC1∥Cm−1
− Cn−1∥2LΩ
+ QC2∥Nm
− Nn∥2LΩ
, (73)

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 195
with QC1 := 2C2Λ1
1 + 2ηCCC + ηNCN
2and QC2 := 2C2
Λ1(ηNCC )
2.
∥Rm4 − Rn
4∥2LΩ
≤ 2C2Λ2
C2C∥Nm
− Nn∥2LΩ
+ C2N∥Cm−1
− Cn−1∥2LΩ
. (74)
Now we prove a sufficient condition for the sequence (Nm)m to converge in X.
Lemma 3.18. Let Cm(ω), Cn(ω) ∈ H1,2 and Nm(ω),Nn(ω) ∈ H1,0 be arbitrary elements of the solution sequences (Cm)m and(Nm)m, respectively. Then (Nm)m converges in X if and only if (Cm)m converges in LΩ . Moreover, the difference ∥Nm
− Nn∥X
satisfies the following inequality:
∥Nm− Nn
∥2X ≤ QN1(1 + QN2) + QN3∥C
m−1− Cn−1
∥2LΩ
, (75)
with QN1 := Te2CΛ2CC TC4Λ2
C2CC
2N , QN2 := 2C2
Λ2C2C and QN3 := 2C2
Λ2C2N .
Proof. From (48) we get
|Nm(t) − Nn(t)| ≤ CΛ2CC
t
0|Nm(s) − Nn(s)|ds + CΛ2CN
T
0|Cm−1(s) − Cn−1(s)|ds,
from which by Gronwall’s inequality
|Nm(t) − Nn(t)| ≤ eCΛ2CC TC2Λ2
CCCN
T
0|Cm−1(s) − Cn−1(s)|ds.
Thus,
∥Nm(t) − Nn(t)∥2L2(D)
≤ e2CΛ2CC TC4
Λ2C2CC
2N
∥Cm−1
− Cn−1∥2LD,T
(76)
∥Nm− Nn
∥2LD,T
≤ QN1∥Cm−1
− Cn−1∥2LD,T
. (77)
Again from (48) we have that
|∂t(Nm(t) − Nn(t))| ≤ CΛ2CC |Nm(t) − Nn(t)| + CΛ2CN |Cm−1(t) − Cn−1(t)|
hence
∥∂t(Nm) − ∂t(Nn)∥2LD,T
≤ 2(CΛ2CC )2∥Nm
− Nn∥2LD,T
+ 2(CΛ2CN)2∥Cm−1− Cn−1
∥2LD,T
. (78)
Thus from (77) and (78) we have that
∥Nm− Nn
∥2LD,T
+ ∥∂tNm− ∂tNn
∥2LD,T
≤ QN1(1 + 2C2Λ2
C2C )∥Cm−1
− Cn−1∥2LD,T
+ 2C2Λ2
C2N∥Cm−1
− Cn−1∥2LD,T
and taking the Eε-expectation we arrive at
∥Nm− Nn
∥2X ≤
QN1(1 + QN2) + QN3
∥Cm−1
− Cn−1∥2LΩ
. (79)
Similarly, using the inequality (54) from Theorem 3.16 we get the following sufficient condition for the convergence of(Cm)m ⊂ Z.
Lemma 3.19. Let Cm(ω), Cn(ω) ∈ H1,2 and Nm(ω),Nn(ω) ∈ H1,0 be arbitrary elements of the respective solution sequences,then (Cm)m converges inZ if and only if (Cm)m converges inLΩ , because the difference ∥Cm
−Cn∥ satisfies the following inequality
∥Cm− Cn
∥2Z ≤ QC11∥C
m−1− Cn−1
∥2LΩ
+ QC12∥Cm−1
− Cn−1∥LΩ
, (80)
with
QC3 := QC1 + QC2QN1 , QC4 := rCCQN1 + a1CN
QC5 :=QC1
cD+ QN1
QC2
cD+
TeTQC3
cD, QC6 :=
TeTQC4
cD+
a1CC
cD+
a1CN
cD
QN1
QC7 := 4Q 2C1 + 4QN1(Q
2C2 + 4a21C
2C ) + 4a21C
N , QC8 := 4C2D
QC9 := q5Q 2C1 + q7QC7 + q7QC8QC5 + q5Q 2
C2QN1 , QC10 := q7QC8QC6
QC11 := TeTQC3 + (QC8 + 1)QC5 + QC7 + QC9 , QC12 := TeTQC4 + QC6(QC8 + 1) + QC10

196 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
and a1 such that
8
1cD
+ r5
C4R3 |D|
4T + (1 + r6)∥C0∥4H1(D)
< a1 < ∞.
Proof. Let Cm(ω), Cn(ω) ∈ (Cm(ω))m; then by Theorem 3.16 Cm(ω), Cn(ω) ∈ H1,2. In particular, Cm(t, ·, ω) ∈ H2(D) forany fixed t ∈ [0, T ] and m ∈ N∗. Consequently, we can set v := Cm(t, ·, ω) − Cn(t, ·, ω) in (47a), from which we get forfixed t ∈ [0, T ] and ω ∈ Ωϵ (remember Notation 3):
⟨∂t(Cm− Cn), Cm
− Cn⟩ = (Rm
3 − Rn3, C
m− Cn) −
Dm
∇Cm− Dn
∇Cn, ∇(Cm− Cn)
12
ddt
∥Cm− Cn
∥2L2(D)
=
Rm3 − Rn
3, Cm
− Cn
−
Dm
∇Cm− Dn
∇Cn, ∇(Cm− Cn)
=
Rm3 − Rn
3, Cm
− Cn
− Dn∇(Cm
− Cn), ∇(Cm− Cn)
− ∇Cm
Dm
− Dn, ∇(Cm− Cn)
≤ ∥Rm
3 − Rn3∥L2(D)∥C
m− Cn
∥L2(D) − cD∥∇(Cm− Cn)∥2
L2(D)
+ ∥Dm− Dn
∥L2(D)∥∇Cm∥2L4(D)
∥∇Cm− ∇Cn
∥2L4(D)
.
Since Cm, Cn∈ H2(D) it implies that ∇Cm, ∇Cn
∈ H1(D) and we obtain12
ddt
∥Cm− Cn
∥2L2(D)
+ cD∥∇(Cm− Cn)∥2
L2(D)≤ ∥Rm
3 − Rn3∥L2(D)∥C
m− Cn
∥L2(D)
+ C∥Dm− Dn
∥L2(D)∥∇Cm∥2H1(D)
∥∇Cm− ∇Cn
∥2H1(D)
. (81)
Using the Lipschitz continuity of R3 and D we getddt
∥Cm− Cn
∥2L2(D)
≤ ∥Rm3 − Rn
3∥2L2(D)
+ ∥Cm− Cn
∥2L2(D)
+ a1CC∥Nn− Nm
∥L2(D) + a1CN∥Cn−1− Cm−1
∥L2(D)
≤ QC1∥Cm−1
− Cn−1∥2L2(D)
+ QC2∥Nm
− Nn∥2L2(D)
+ ∥Cm− Cn
∥2L2(D)
+ a1CC∥Nn− Nm
∥L2(D) + a1CN∥Cn−1− Cm−1
∥L2(D)
with a1 such that
a := supt∈[0,T )
4∥∇Cm(t)∥4H1(D)
≤ supt∈[0,T )
8∥∇Cm(t)∥4L2(D)
+ ∥1Cm(t)∥4L2(D)
≤ 8
1cD
+ r5
∥Rm
3 ∥4LD,T
+ (1 + r6)∥C0∥4H1(D)
(50)≤ 8
1cD
+ r5
C4R3 |D|
4T + (1 + r6)∥C0∥4H1(D)
< a1 < ∞.
Applying Gronwall’s inequality and integrating with respect to time we get
∥Cm− Cn
∥2LD,T
≤ TeTQC1∥C
m−1− Cn−1
∥2LD,T
+ QC2∥Nm
− Nn∥2LD,T
+ a1CC∥Nn− Nn
∥LD,T + a1CN∥Cm−1− Cn−1
∥LD,T
.
Using (77) we get
∥Cm− Cn
∥2LD,T
≤ TeTQC3∥C
m−1− Cn−1
∥2LD,T
+ QC4∥Cm−1
− Cn−1∥LD,T
, (82)
where QC3 := QC1 + QC2QN1 , QC4 := a1CCQN1 + a1CN , CC := CCC and CN := CCN .
From (81) we also get
∥∇(Cm− Cn)∥2
LD,T≤
QC1
cD∥Cm−1
− Cn−1∥2LD,T
+QC2
cD∥Nm
− Nn∥2LD,T
+1cD
∥Cm− Cn
∥2LD,T
+a1CC
cD∥Cm−1
− Cn−1∥LD,T +
a1CN
cD∥Nm
− Nn∥LD,T .
Using (77) we get
∥∇(Cm− Cn)∥2
LD,T≤ QC5∥C
m−1− Cn−1
∥2LD,T
+ QC6∥Cm−1
− Cn−1∥LD,T (83)
where QC5 :=QC1cD
+ QN1
QC2cD
+TeTQC3
cDand QC6 :=
TeTQC4cD
+a1CCcD
+a1CNcD
QN1 .

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 197
Now for all v ∈ H1(D) with ∥v∥H1(D) ≤ 1 we have that
supv
|⟨∂t(Cm− Cn), v⟩| ≤ ∥Rm
3 − Rn3∥L2(D)∥v∥L2(D) + CD∥∇Cm
− ∇Cn∥L2(D)∥v∥L2(D)
+ ∥Dm− Dn
∥L2(D)∥∇Cm∥L4(D)∥v∥L4(D)
⇒ ∥∂t(Cm− Cn)∥(H1(D))∗ ≤ ∥Rm
3 − Rn3∥L2(D)∥v∥H1(D) + CD∥∇Cm
− ∇Cn∥L2(D)∥v∥H1(D)
+ C∥Dm− Dn
∥L2(D)∥∇Cm∥H1(D)∥v∥H1(D)
≤ ∥Rm3 − Rn
3∥L2(D) + CD∥∇Cm− ∇Cn
∥L2(D) + a1C∥Dm− Dn
∥L2(D) (84) T0
⇒ ∥∂t(Cm− Cn)∥
L20,T ;(H1(D))∗
≤ ∥Rm3 − Rn
3∥LD,T + CD∥∇Cm− ∇Cn
∥LD,T + a1C∥Dm− Dn
∥LD,T . (85)
Using the Lipschitz continuity of R3 and D we get that
∥∂t(Cm− Cn)∥2
L20,T ;(H1(D))∗
≤ 4Q 2C1∥C
m−1− Cn−1
∥2LD,T
+ 4Q 2C2∥N
m− Nn
∥2LD,T
+ 4C2D∥∇(Cm
− Cn)∥2LD,T
× 4a21C2C∥Nm
− Nn∥2LD,T
+ 4a21C2N∥Cm−1
− Cn−1∥2LD,T
.
Using (77) we get
∥∂t(Cm− Cn)∥2
L20,T ;(H1(D))∗
≤ QC7∥Cm−1
− Cn−1∥2LD,T
+ QC8∥∇(Cm− Cn)∥2
LD,T(86)
where QC7 := 4Q 2C1
+ 4QN1(Q2C2
+ 4a21C2C ) + 4a21C
2N , QC8 := 4C2
D .For the second weak derivative we have that
∥∆(Cm− Cn)∥2
LD,T≤ q5∥Rm
3 − Rn3∥
2LD,T
+ q7∥∂t(Cm− Cn)∥2
LD,T
≤ q5∥Rm3 − Rn
3∥2LD,T
+ q7∥∂t(Cm− Cn)∥2
L20,T ;(H1(D))∗
(86)≤ (q5Q 2
C1 + q7QC7)∥Cm−1
− Cn−1∥2LD,T
+ q5Q 2C2∥N
m− Nn
∥2LD,T
+ q7QC8∥∇(Cm− Cn)∥2
LD,T(83)≤ (q5Q 2
C1 + q7QC7 + q7QC8QC5)∥Cm−1
− Cn−1∥2LD,T
+ q7QC8QC6∥Cm−1
− Cn−1∥LD,T + q5Q 2
C2∥Nm
− Nn∥2LD,T
(77)≤ QC9∥C
m−1− Cn−1
∥2LD,T
+ QC10∥Cm−1
− Cn−1∥LD,T (87)
where QC9 := (q5Q 2C1
+ q7QC7 + q7QC8QC5 + q5Q 2C2QN1) and QC10 := q7QC8QC6 .
So from (82), (83), (87) and (86) we get
∥Cm− Cn
∥2H1,2 ≤ QC11∥C
m−1− Cn−1
∥2L2(D)
+ QC12∥Cm−1
− Cn−1∥LD,T (88)
where
QC11 := TeTQC3 + (QC8 + 1)QC5 + QC7 + QC9 and QC12 := TeTQC4 + QC6(QC8 + 1) + QC10 .
Now taking Eε-expectation we get
∥Cm− Cn
∥2Z ≤ QC11∥C
m−1− Cn−1
∥2LΩ
+ QC12∥Cm−1
− Cn−1∥LΩ
. (89)
Thus if (Cm)m is Cauchy in LΩ then (Cm)m is also Cauchy in Z, since QC9 and QC10 are bounded for any fixed time T .
Thereby, it is sufficient to find a condition for the sequence (Cm)m to be Cauchy in LΩ .
Theorem 3.20 (CPDM Time Condition and Existence). Let T > 0 satisfy the condition (53) then there exists 0 < T < ∞ andT > 0 satisfying
(TCPDM)
T eT <
1
maxQC312(C
2R3
+ C2C ),QC4
,
T = min(T , T ).
(90)
be such that (CPDM) has an unique solution.

198 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Proof. From (82) we see that
∥Cm− Cn
∥2LD,T
≤ T eT (QC3∥Cm−1
− Cn − 1∥LD,T + QC4)∥Cm−1
− Cn−1∥LD,T
≤ T eT maxQC3∥C
m−1∥LD,T + ∥Cn−1
∥LD,T ,QC4
∥Cm−1
− Cn−1∥LD,T .
Using (70) and the uniform boundedness of R3 (see (50)) and C0 we get
∥Cm− Cn
∥2LD,T
≤ T eT maxQC32e
T/2T (C2R3 + C2
C ),QC4
∥Cm−1
− Cn−1∥LD,T .
Thus, we have that for
T eT <1
max12QC3(C
2R3
+ C2C ),QC4
(91)
then (Cm)m is a Cauchy sequence in LΩ . So, due to completeness of LΩ we get that (Cm)m converges to C in LΩ . FromLemma 3.19 we in turn have that (Cm)m converges to C in Z. Now by invoking Lemma 3.18 we get that Nm converges to Nin X.
Furthermore, we get that (Cm)m(ω) and Nm(ω) are Cauchy sequences in L2(0, T ; L2(D)). So (Cm)m(ω) and Nm(ω)converge to C(ω) and N(ω) in L2(0, T ; L2(D)) respectively. In particular, for (Cm)m(ω) due to (80) we get that sequence alsoconverges in H1,2. Thus the vector
C(ω),N(ω)
solves the macroscopic model in a weak sense for a.e. ω ∈ Ωϵ . Moreover,
the solution is unique as proven below.
Theorem 3.21 (Uniqueness). (C,N) ∈ Z × X is the unique solution to (CPDM).Proof. Let N1 and N2 be two solutions to (9)(c), then it holds that
D
∂t(N1 − N2)υdx =
D
R4(C1,N1) − R4(C2,N2)υds.
Letting υ := N1 − N2 and using the Lipschitz continuity of R4 we get
ddt
∥N1 − N2∥2L2(D)
≤ 2CΛ2
KC∥N1 − N2∥
2L2(D)
+ KNϵ∥C1 − C2∥2L2(D)
+
∥N1 − N2∥2L2(D)
ϵ
≤ 2CΛ2
KC∥N1 − N2∥
2L2(D)
+2KN∥N1 − N2∥
2
ϵ
= 2CΛ2
KC +
2KN
ϵ
∥N1 − N2∥
2L2(D)
.
This implies that
∥N1 − N2∥2L2(D)
≤
0 ∥N1(0) − N2(0)∥2
L2(D)exp
2CΛ2ϱ2
KC +
2KN
ϵ
t
⇒ ∥N1 − N2∥2LD,T
≤ 0 3.18⇒(93)
∥N1 − N2∥2H1,0 ≤ 0 ⇒ ∥N1 − N2∥
2X ≤ 0. (92)
Hence N1,N2 ∈ X are a.s. identical.Now for the uniqueness of C ∈ Y, let C1, C2 ∈ Y be such that almost every sample path is a weak solution to (9)(b). Also,
let Di := D(Ci,N, Y ) and Ri3 := R3(Ci,N, X), i ∈ 1, 2, where X ∈ X,N ∈ X and Y ∈ Y are unique weak solutions to (8)(a),
(9)(c) and (8)(b) respectively. Then we have thatD
∂t(C1 − C2)υdx =
D
(R13 − R2
3)υdx −
D
(D1∇C1 − D2∇C2) · ∇υdx
12
ddt
∥C1 − C2∥2L2(D)
=
D
(R13 − R2
3)(C1 − C2)dx −
D
(D1∇C1 − D2∇C2) · ∇(C1 − C2)dx
≤ ∥R13 − R2
3∥L2(D)∥C1 − C2∥L2(D) − cD∥∇C1 − C2∥2L2(D)
+ ∥D1 − D2∥L2(D)∥∇C1∥2H1(D)
∥∇C1 − ∇C2∥2H1(D)
≤ ∥R13 − R2
3∥L2(D)∥C1 − C2∥L2(D) + ∥D1 − D2∥L2(D)∥∇C1∥2H1(D)
∥∇C1 − ∇C2∥2H1(D)
≤1ϵ1
∥C1 − C2∥2L2(D)
+1ϵ2
∥D1 − D2∥2L2(D)
+ ϵ1 ∥R13 − R2
3∥2L2(D)
uniformly bounded
+ ϵ2 ∥∇C1∥4H1(D)
∥∇C1 − ∇C2∥4H1(D)
. uniformly bounded
.

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 199
So for ϵ1, ϵ2 > 0 sufficiently small we get
12
ddt
∥C1 − C2∥2L2(D)
≤1ϵ1
∥C1 − C2∥2L2(D)
+CN
ϵ2∥C1 − C2∥
2L2(D)
+CC
ϵ2∥N1 − N2∥
2L2(D)
=0
≤
1ϵ1
+CN
ϵ2
∥C1 − C2∥
2L2(D)
⇒ ∥C1 − C2∥2L2(D)
≤ 0 ⇒ ∥C1 − C2∥2LD,T
≤ 0 ⇒ ∥C1 − C2∥2LΩ
≤ 0. (93)
Hence C1, C2 ∈ Z are a.s. identical in LΩ . They are also a.s. identical in Z due to Lemma 3.19 and since Z ⊂ LΩ .
3.3.3. Measurability of the solution to (CPDM)The proof goes similarly to the measurability proof for the solution of (SPDM).
3.4. Local and global existence for the solution to the multiscale model
Theorem 3.22 (Local Solution). From the existence and uniqueness theorem for (SPDM) 3.10 and (CPDM) 3.20 and the measur-ability lemmas we get that for the time interval [0, T ) with T > 0 and satisfying the condition TCPDM (see (90)) there exists aunique solution
W = (Hi,He, C,N) ∈ X × Y × Z × X
to the full stochastic multiscale system.
Theorem 3.23 (Global Solution). For any finite time T and 0 < ϵ ≪ 1, we can apply the local existence and uniqueness theoremfor the intervals [0, T ), [T − ϵ, 2T ) . . . [T − T − ϵ, T).
Proof. In order to apply the local existence proof for the new time interval [T − ϵ, 2T ), the functions He(ω), C(ω), andD(C,N) need to be in W (p, T , D), so that He(T − ϵ, ω) and C(T − ϵ, ω), the initial conditions for the new time interval,are in W 2,p(D). This can be achieved in the following way. Repeating the argument of Remarks 3 and 4 we get that(Hm
e )m∈N ∈ W (p, T , D) and (Cm)m∈N ∈ W (p, T , D) are bounded sequences. Also, due to the reflexivity of W (p, T , D) thereexists a weakly convergent subsequence (H
mje )j∈N ⊂ (Hm
e )m∈N and (Cmj)j∈N ⊂ (Cm)m∈N such that
Hmje He ∈ W (p, T , D) and Cmj C ∈ W (p, T , D).
Now, we claim that for a.e.t ∈ (0, T ) and a.e.ω ∈ Ωϵ , He(t, ω) and C(t, ω) solve the equationsD
∂tHeφdx −
D
∇He · ∇φdx +
D
Heφ =
D
T (Hi,He)φdx, ∀φ ∈ H1(D),
and D
∂tCφdx −
D
D(C,N)∇C · ∇φdx =
D
R3(C,N)φdx, ∀φ ∈ H1(D),
respectively.For p > d + 2, the above claim can be proved using the following facts and assertions:
1. W (p, T , D) →→ Lp0, T ; Lp(D)
→ L2(0, T ; L2(D)),
2. R2(Hmi ,Hm
e ), R3(Hi, Cm,Nm+1) ∈ Lp0, T ; Lp(D)
,
3. D(Cm,Nm+1) ∈ W (p, T , D),
4. ∇Cm∈ Lp
0, T ;W 1,p(D)
and ∂t∇Cm
∈ L20, T ; (H1(D))∗
5. Assertion 4 and the Lions–Aubin lemma
⇒
φ ∈ Lp
0, T ;W 1,p(D)
; φ′
∈ L2(0, T ; (H1(D))∗)
→→ Lp0, T ; Lp(D)
.
Assertion 4 can be shown in the following way:From (67) we have that
cD(∇Cmn , ∂t∇Cm
n ) = (Rm3 , ∂tCm
n ) − ⟨∂tCmn , ∂tCm
n ⟩
cD⟨∂t∇Cmn , ∇Cm
n ⟩ = (Rm3 , ∂tCm
n ) − ⟨∂tCmn , ∂tCm
n ⟩
cD⟨∂t∇Cmn , ∇Cm
n ⟩2
≤ 2∥Rm3 ∥
2L2(D)
∥∂tCmn ∥
2L2(D)
+ddt
∥Cmn ∥
4L2(D)

200 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
T0
⇒
T
0cD⟨∂t∇Cm
n , ∇Cmn ⟩
2dt ≤ ∥Rm3 ∥
4L2(0,T ;L2(D))
+ ∥∂tCmn ∥
4L2(0,T ;L2(D))
+ ∥Cmn ∥
4L2(D)
+ ∥C0∥4L2(D)
(70), (71)≤ K(∥Rm
3 ∥4L2(0,T ;L2(D))
+ ∥C0∥4L2(D)
) < ∞.
Consider the space
W :=
φ ∈ L2(0, T ;H2(D)); φ′
∈ L2(0, T ; L2(D)) such that φ solves the (47a)weakly.
Due to the existence theorem for (47a) the space W = ∅. Also, since one can impose several boundary conditions to (47a)the set W is not a singleton. Clearly, W ⊂ H1,2.
For all φ ∈ W its gradient φ := ∇φ is in L2(0, T ;H1(D)). So T
0⟨∂t∇Cm
n , φ⟩2dt ≤ K(∥Rm
3 ∥4L2(0,T ;L2(D))
+ ∥C0∥4L2(D)
) < ∞. (94)
Since
W ⊂ H1,2⊂ L2
0, T ;H1(D)
⇒ L2
0, T ; (H1(D))∗
⊂ (H1,2)∗ ⊂ W∗
we get that ∂t∇Cmn ∈ L2
0, T ; (H1(D))∗
.
From Eq. (94) we have that (∂t∇Cmn )n∈N is an uniformly bounded sequence, hence there exists a subsequence
(∂t∇Cmnk)k∈N ⊂ (∂t∇Cm
n )n∈N and v ∈ L20, T ; (H1(D))∗
such
∂t∇Cmnk
l→∞
v in L20, T ; (H1(D))∗
and ∥v∥ ≤ lim inf
k∈N∥∂t∇Cm
nk∥.
It is clear that the limit v = ∂t∇Cm. Thus assertion 4 holds.Using the above five assertions we get that:
Cmj C in W (p, T , D) ⇒ Cmj → C in Lp0, T ; Lp(D)
,
Hmje He in W (p, T , D) ⇒ H
mje → He in Lp
0, T ; Lp(D)
,
∇Cmj ∇Cm in Lp0, T ;W 1,p(D)
⇒ Cmj → C in Lp
0, T ; Lp(D)
.
By dominated convergence and the above Lipschitz estimates for Hi and N the claim follows.With He, C ∈ W (p, T , D) the local existence and uniqueness proof is applicable to every bounded time sub-intervals of
[0, T).
4. Numerical simulations
In this sectionwe present some simulation results for the stochastic multiscalemodel (abbreviated as SMSM) introducedabove. We use a RODE–Taylor scheme [33,34] for discretizing the intracellular proton Eq. (1) and implicit finite differenceschemes for the rest of the equations.
4.1. Simulations with a proliferation function switching between growth and decay
Here we present only the results obtained for SMSM by choosing a Λ1(Hi) function that takes both positive and negativevalues, since other cases are less interesting. Typically, a proliferation function is a nonnegative function influencing the rateof growth. However, as mentioned in Section 2.3, extreme values of Hi can induce death even for cancer cells. Since Λ1 is afunction ofHi we carry out simulations for the cancer proliferation functionΛ1(Hi)which is positive forHi in an appropriateinterval of the real line.
Fig. 4 illustrates the expectation (averaged over 428 sample paths) of the solution to SMSM at different fixed time points.A sequence of increasing time points is chosen to highlight the temporal trend.
Further, in order to easily observe the effects of stochasticity we plot the time evolution graphs at fixed spatial points. Tosee the spatial trend we choose four equidistantly spaced spatial points. For each of these fixed spatial points, Figs. 5 and 6depict the time evolution of 15 (out of 428) sample paths. In all these figures the average of the sample paths of the solutionto SMSM is represented by a dashed line.
Fig. 5 contains the simulation results for SMSM with a Brownian bridge driven noise term. The proliferation functionΛ1(Hi) is as shown in Fig. 3. It is positive for Hi approximately in the interval [0.290785, 0.40278] and negative for all otherpositive values of Hi. Also, it attains its maximum value of 1.4 when Hi ≈ 0.3513. The rate constant ϱ1 (which we call

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 201
t = 0.0 t = 50.0 t = 90.0
t = 380.0 t = 540.0 t = 4600.0
0 5 10x
15
1.2
1.0
0.8
0.6
0.4
0.2
0.0
cell
dens
ity/p
roto
n co
ncen
trat
ion
0 5 10x
15
1.2
1.0
0.8
0.6
0.4
0.2
0.0
cell
dens
ity/p
roto
n co
ncen
trat
ion
0 5 10x
15
1.2
1.0
0.8
0.6
0.4
0.2
0.0
cell
dens
ity/p
roto
n co
ncen
trat
ion
0 5 10x
15
1.2
1.0
0.8
0.6
0.4
0.2
0.0
cell
dens
ity/p
roto
n co
ncen
trat
ion
0 5 10x
15
1.2
1.0
0.8
0.6
0.4
0.2
0.0
cell
dens
ity/p
roto
n co
ncen
trat
ion
0 5 10x
15
1.2
1.0
0.8
0.6
0.4
0.2
0.0
cell
dens
ity/p
roto
n co
ncen
trat
ion
Fig. 4. Plots for expected values of cell densities and proton concentration over the spatial interval [0, 1.9] corresponding to different fixed time points.Hi is represented by a vertical bar (|||) curve, He by a dashed (- - -) curve, C by the continuous (—) curve and N by a dot–dash (-· − ·-) curve.
proliferation sensitivity parameter) was assigned a relatively high value to represent a tumor that is sensitive to changes(positive or negative) induced by Hi. To contrast this behavior, we performed simulations for a less sensitive (in the abovementioned sense) type of tumor by downscaling the value of ϱ1 by a factor of 100. The corresponding simulation results areshown in Fig. 6. Altogether, these figures illustrate the following salient features of the SMSMmodel:
1. The SMSM model predicts under certain conditions time decay for the cancer cell density C(t, x). This is due to theparticular choice of the proliferation function Λ1(Hi) which switches between growth and decay. Thus, if the protondynamics induced by the noise term results in values of Hi consistently outside the interval of the positive part of Λ1(representing cytotoxicity due to high acidity levels), it then induces a consistent decay in cancer cell density.
2. The observation made in 1 can be easily verified by inspecting Fig. 5, where some sample paths C(t, .) (cancer cell den-sity) decay to zero and stay there, while some approach zero and after a while increase (or start to increase) towards thevalue 1.
3. From Fig. 5 we observe that though some of the sample paths of C(t, x) show consistent decay, its expected behavior(averaged over 428 sample paths) shows indeed a very slow invasive behavior. The rate of invasion is drastically sloweddown due to the decay of C in a certain time span. Another crucial insight that comes to light when Fig. 6 is comparedwith Fig. 5 is that a smaller proliferation sensitivity parameter (ϱ1) actually results in higher expected density of cancercells. This might seem counterintuitive, but it makes sense, as the reduction of ϱ1 diminishes the effect of the negativevalues of the switching function; thereby less sample paths undergo decay and as a result the expected density of cancercells is relatively high.
4. The effect of a switching type of Λ1(Hi) function on normal cells is that their apparent extinction time is delayed signif-icantly.
5. Conclusion
In this work we proposed and studied a new multiscale model for acid mediated cancer invasion, a topic which hasattracted increased attention over the last decade. Since the source and decay terms in our model for the proton dynamicswere constructed based on experimental data, the resulting behavior is to some extent reliable. Moreover, the modelaccounts for the noise and uncertainties at the microscopic level. We proved the wellposedness of the model, thus clearingthe way for numerical simulations. From the results we can conclude the following:
1. For a non-negative proliferation function Λ1(Hi) (simulations not shown), our stochastic multiscale model predictssustained tumor invasion. The cancer population density reaches its carrying capacity, the normal cell population densityreaches extinction, and its extinction rate is intensified as the cancer cell density approaches its carrying capacity.

202 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Fig. 5. Time evolution plots of SMSM with Brownian bridge noise for 4 different spatial points. The top left subfigure corresponds to the spatial pointx = 0, the top right to the spatial point x = 0.5, bottom left to the spatial point x = 1, and bottom right to the spatial point x = 1.5.
2. For a growth function Λ1(Hi) taking both positive and negative values, the model exhibits a richer dynamics, especiallyfor the cancer population. If the noise term induces toxic Hi values, then Λ1(Hi) can become negative, thus leading to adecay in cancer cell density. Hence, the model not only can predict a persistent invasive behavior of cancer cells, but alsoput in evidence the following interesting features:
• Quiescent and active phases of cancer cells: In the dormant phase, cancer cells are unable to proliferate and are diminishingin number, hence their densitymay become nearly zero and remain thatway until the intracellular acidity (Hi) is suitablefor proliferation. In the active phase, cancer cells resume their replication cycle due to a conducive intracellular pH level.Consequently, their cell density begins to increase, which in turn enhances migration, thereby intensifying the decayof normal cells. Because this phase switching is prominent for relatively high values of ϱ1 we infer that such behavioris typical for cancer cells sensitive to change induced by Hi. Since for positively induced changes of Hi the proliferationsensitivity parameter is ameasure of tumor aggressiveness, we conjecture that aggressive tumors are sensitive to cytotoxicvalues of Hi and they diminish or surge quite rapidly. However, their declining trend may be a transient behavior, i.e. just anentry into a quiescent phase, and they are very well capable of resuming their active phase unless completely eradicated.
• Extinction of cancer cells: If the noise term in (SPDM) induces an intracellular dynamics for which Λ1(Hi) is negative forsufficiently long time, then the cancer cell population can approach extinction.
These observations align to experimental evidence that tumor cells are able to enter into a quiescent state under severe orprolonged hypoxic stress [35], however eventually die if the toxicity is too pronounced. The crucial conclusions here are:
1. As cancer is an ecosystem of various cell types, different types of cancer cells exhibit different phases of behavior (fore.g., quiescent phase, active phase, extinction phase, and invasive phase) at different timemoments, such that as a colonythey are able to compensate individual deficits and achieve the expected invasive behavior.

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 203
Fig. 6. Time evolution plots of SMSM with Brownian bridge noise with small proliferation sensitivity parameter for 4 different spatial points. The top leftsubfigure corresponds to the spatial point x = 0, the top right to the spatial point x = 0.5, bottom left to the spatial point x = 1, and bottom right to thespatial point x = 1.5.
2. Aggressive cancers4 are illusive in behavior, in the sense that they show signs of rapid depletion in a non-conduciveenvironment, but revert to their true invasive nature as soon as the odds are favorable.
3. It seems that the tumors featuring enhanced invasiveness are not themost aggressive ones, but those being less sensitive(w.r.t. proliferation) against fluctuations of the intracellular pH, which in turn reflect the randomness of the cells’environment. The more robust tumors do not show the steep variations in the cell density observed for aggressivecarcinoma, but they exhibit sustained growth.
Altogether, the model endowed with a noise term F(χt ,Hi), proliferation function Λ1(Hi) switching between phases ofgrowth and decay and a relatively high proliferation sensitivity parameter, can achieve a robust and tight coupling of themacro- and microscales, thereby allowing for a realistic and collaborative ecosystem type dynamics of cancer cells.
Given the fact that cancer migration is a complex process influenced by its proximal environment and several randomcellular mechanisms, deterministic models are too idealistic and sometimes fail to make sufficiently reliable predictions,while stochastic models are not only capable of overcoming this gap, but may also bring to light some rare and interestingfeatures.
Acknowledgments
S. Hiremath is supported by the Center forMathematical and ComputationalModeling at the University of Kaiserslautern.C.S. is supported by a DFG research grant SU 807/1-1.
4 From the perspective of the proliferation sensitivity parameter ϱ1 being a measure of aggressiveness of the tumor for positively induced changes byHi .

204 S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205
Table 1Simulation parameters.
Noise parameters Macroscopic parameters Numerical parameters
ϑ 7.3 × 10−5 ϱ2 0.001 T (Total time) 500a 1 γ 0.001 M (# Monte Carlo simulations) 428b 2 ηC 1 τ (Temporal step size) 0.1
ηN 0.3 hx1 (Spatial step size along x1) 0.1Nx1 (Grid resolution along x1) 20
Table 2Parameters for sensitive and less-sensitive types of cancer driven by Brownian Bridge (BB) noise.
Sensitive Less-sensitive
ϱ1 =
0.5 if Λ1 ≥ 00.05 if Λ1 < 0 ϱ1 =
0.005 if Λ1 ≥ 00.0005 if Λ1 < 0
Appendix
A.1. Nondimensionalisation
Let τ := 10−7 (measured in min) be a time normalizing constant and Kw := 10−7 (measured in Mvolcells ) be the molar
concentration of protons in water per cells per vol. Let the dependent variables Hi and He (both measured in Mvolcells ) be
represented in a non-dimensional form as H i :=HiKw
,He :=HeKw
. Similarly, the time variable t (measured in min) and spatial
variable x (measured in dist5) are non-dimensionalized as t =tτ, x =
x√D1τ
, where D1 (measured in dist2min ) is the apparent
diffusion coefficient of extracellular protons.The non-dimensional formulation can be deduced using the following rescaling relations:
T 1 :=τ
Kw
T1, T 2 :=τ
Kw
T2, T 3 :=τ
Kw
T3,
S1 :=τ
Kw
S1, S2 := τS2, Q :=τ
Kw
Q ,
∆ := D1τ∆,τ
Kw
:= 1, t :=tτ
.
(95)
For the cell population dynamics we have N, C, KN , KC ∝cellsvol , ϱ1 ∝
1sec , γ ∝
distsec2
. So we define the new unitless variables
C :=CKC
, N :=NKN
, γ :=γ
D1, ϱ1 := τϱ1,
D :=D2(C,N,He)
D1, x :=
x√
τD1, ∇ :=
τD1∇ ϱ2 := KCτϱ2.
(96)
A.2. Parameters used in the simulations
We set Ξ (the parameter vector used in the microscopic model) to value (0.04, 108.5)T . This choice was made after thestability analysis of (SPDM)without the noise term (i.e., for a deterministic proton dynamics model). The aim of the stabilityanalysis was to choose the parameters so that the long term behavior of the deterministic proton model has a stable fixedpoint whose Hi and He values represent a reverse pH gradient (see Tables 1 and 2). Initial conditions were taken as:
Hi(0, x) = 0.4 exp−
∥x∥22
0.3
+ 0.7z(x), z(x) ∼ U([0, 1]), He(0, x) = 0.8 exp
−
∥x∥22
0.3
,
C(0, x) = exp−
∥x∥22
0.3
, N(0, x) = 1 − exp
−
∥x∥22
0.3
.
5 dist refers to some unit of distance suitable for the macroscopic scale of tissues.

S. Hiremath, C. Surulescu / Nonlinear Analysis: Real World Applications 22 (2015) 176–205 205
References
[1] R.A. Gatenby, R.J. Gillies, Why do cancers have high aerobic glycolysis? Nat. Rev. Cancer 4 (11) (2004) 891–899.[2] E. Racker, Why do tumor cells have a high aerobic glycolysis? J. Cell. Physiol. 89 (4) (1976) 697–700.[3] R.A. Gatenby, R.J. Gillies, Glycolysis in cancer: a potential target for therapy, Int. J. Biochem. Cell Biol. 39 (7–8) (2007) 1358–1366.[4] R.A. Gatenby, E.T. Gawlinski, The glycolytic phenotype in carcinogenesis and tumor invasion: insights through mathematical models, Cancer Res. 63
(14) (2003) 3847–3854.[5] B.A. Webb, M. Chimenti, M.P. Jacobson, D.L. Barber, Dysregulated pH: a perfect storm for cancer progression, Nat. Rev. Cancer 11 (9) (2011) 671–677.[6] O.R. Abakarova, The metastatic potential of tumors depends on the pH of host tissues, Bull. Exp. Biol. Med. 120 (1995) 1227–1229.[7] R. Martinez-Zaguilan, E.A. Seftor, R.E.B. Seftor, Y. Chu, R.J. Gillies, M.J.C. Hendrix, Acidic pH enhances the invasive behavior of human melanoma cells,
Clin. Exp. Metastasis 14 (1996) 176–186.[8] R.A. Gatenby, E.T. Gawlinski, A reaction–diffusion model of cancer invasion, Cancer Res. 56 (24) (1996) 5745–5753.[9] A. Fasano, M. Herrero, M. Rocha Rodrigo, Slow and fast invasion waves in a model of acid-mediated tumour growth, Math. Biosci. 220 (2009) 45–56.
[10] K. Smallbone, D.J. Gavaghan, R.A. Gatenby, P.K. Maini, The role of acidity in solid tumor growth and invasion, J. Theoret. Biol. 235 (2005) 476–484.[11] C. Märkl, G. Meral, C. Surulescu, Mathematical analysis and numerical simulations for a system modeling acid mediated tumor cell invasion, Int. J.
Anal. 2013 (2013) 15.[12] N.K. Martin, E.A. Gaffney, R.A. Gatenby, P.K. Maini, Tumor–stromal interactions in acid-mediated invasion: a mathematical model, J. Theoret. Biol. 267
(2010) 461–470.[13] A.H. Lee, I.F. Tannock, Heterogeneity of intracellular pH and of mechanisms that regulate intracellular pH in populations of cultured cells, Cancer Res.
58 (1998) 1901–1908.[14] C. Stock, A. Schwab, Protons make tumor cells move like clockwork, European J. Physiol. 458 (2009) 981–992.[15] S.D. Webb, J.A. Sherratt, R.G. Fish, Mathematical modelling of tumor acidity: Regulation of intracellular pH, J. Theoret. Biol. 196 (2) (1999) 237–250.[16] S.D. Webb, J.A. Sherratt, R.G. Fish, Alterations in proteolytic activity at low pH and its association with invasion: a theoretical model, Clin. Exp.
Metastasis 17 (5) (1999) 397–407.[17] G.Meral, C. Surulescu, Mathematical modeling, analysis and numerical simulations for the influence of heat shock proteins on tumor invasion, J. Math.
Anal. Appl. 408 (2013) 597–614.[18] G. Meral, C. Stinner, C. Surulescu, On a multiscale model involving cell contractivity and its effects on tumor invasion, Discrete Contin. Dyn. Syst. Ser.
B (2014) in press.[19] C. Stinner, C. Surulescu, M. Winkler, Global weak solutions in a PDE–ODE system modeling multiscale cancer cell invasion, SIAM J. Math. Anal. 46
(2014) 1969–2007.[20] C. Surulescu, N. Surulescu, A nonparametric approach to cell dispersal, Int. J. Biomath. Biostat. 1 (2010) 109–128.[21] C. Surulescu, N. Surulescu,Modeling and simulation of some cell dispersion problems by a nonparametricmethod,Math. Biosci. Eng. 8 (2011) 263–277.[22] C. Surulescu, N. Surulescu, Some classes of stochastic differential equations as an alternative modeling approach to biomedical problems,
in: P.E. Kloeden, C. Pötzche (Eds.), Random and Nonautonomous Dynamical Systems in the Life Sciences, in: LNM, vol. 2102, Springer, 2013,Biomathematics Series.
[23] J. Kelkel, C. Surulescu, On a stochastic reaction–diffusion system modeling pattern formation on seashells, J. Math. Biol. 60 (6) (2010) 765–796.[24] E. Jakobsson, S.W. Chiu, Stochastic theory of ion movement in channels with single-ion occupancy. Application to sodium permeation of gramicidin
channels, Biophys. J. 52 (1987) 33–45.[25] M.J. Boyer, I.F. Tannock, Regulation of intracellular pH in tumor cell lines: influence of microenvironmental conditions, Cancer Res. 52 (16) (1992)
4441–4447.[26] J.S. Horne, E.O. Garton, S.M. Krone, J.S. Lewis, Analyzing animal movements using Brownian bridges, PubMed Ecol. 88 (9) (2007) 2354–2363.[27] L.D. Shrode, H. Tapper, S. Grinstein, Role of intracellular pH in proliferation, transformation, and apoptosis, J. Bioenerg. Biomembr. 29 (4) (1997)
393–399.[28] J.R. Casey, S. Grinstein, J. Orlowski, Sensors and regulators of intracellular pH, Nature Rev. Mol. Cell Biol. 11 (1) (2010) 50–61.[29] S.A. Hiremath, Stochastic Multiscale Modeling of Acid Mediated Cancer Invasion (Master Thesiss), September 2013.[30] L.C. Evans, Partial Differential Equations, Vol. 9, AMS, 1997.[31] O.A. Ladyzhenskaya, V.A. Solonnikov, N.N. Uraltseva, Linear andQuasilinear Equations of Parabolic Type, in: Translations ofMathematicalMonographs,
vol. 23, American Mathematical Society, Providence, RI, 1967.[32] D. Le, H. Smith, Strong positivity of solutions to parabolic and elliptic equations on nonsmooth domains, J. Math. Anal. Appl. 275 (1) (2002) 208–221.[33] A. Jentzen, P.E. Kloeden, Taylor Approximations for Stochastic Partial Differential Equations, SIAM, 2011.[34] A. Jentzen, P.E. Kloeden, Pathwise Taylor schemes for random ordinary differential equations, BIT 49 (1) (2009) 113–140.[35] J.A. Royds, S.K. Dower, E.E. Qwarnstrom, C.E. Lewis, Response of tumour cells to hypoxia: role of p53 and NFkB, J. Clin. Pathol. Mol. Pathol. 51 (1998)
55–61.