Embed Size (px)
Citation preview
A VÉGESELEMES
MODELLEZÉS
KONTINUUMMECHANIKAI ALAPJAI
Páczelt István, Nándori Frigyes, Sárközi László, Szabó Tamás, Dluhi Kornél, Baksa Attila
Miskolci Egyetem, Mechanikai Tanszék
HEFOP-3.3.1-P-2004-06-0012


ELŐSZÓ
Az oktatási segédlet felsőfokú végzettségű, elsősorban mérnökök számára ké-szült, akik tanulmányaik során megismerkedtek a szilárdságtan és a lineáris rugal-masságtan alapfogalmaival. Jártasságot szereztek a vektor és tenzorszámítás, illet-ve a mátrix algebra területén. A jegyzet célul tűzi ki bonyolult geometriával és terheléssel rendelkező gépészeti szerkezetek szilárdságtani analízisét. A megoldás a végeselemes módszer alkalmazásával történik. Ennek megfelelően a jegyzet rö-vid összefoglalókra építve áttekintést ad a módszer általános kérdéseiről, majd sorra veszi a mérnöki gyakorlatban leginkább elterjedt végeselemes eljárásokat: egyváltozós (rúd) feladatok, kétváltozós (síkbeli, forgásszimmetrikus, illetve hajlí-tott lemez) feladatok és térbeli feladatok. A módszer tárgyalása során külön hang-súlyt kapnak az izoparametrikus elemcsalád alkalmazása, illetve a modellezés spe-ciális problémái (alszerkezettechnika, ferde görgő, excentrikus csatlakozás, el-mozdulás-mezőbeli szakadás stb.). Végül bemutatjuk az I-DEAS programrendszer végeselemes alkalmazását néhány alapfeladat megoldásán keresztül.
Érdemes itt is kiemelni, hogy a vektor és tenzor jellegű mennyiségek kétféle je-löléssel is előfordulnak. Ennek megfelelően jelöléskor a vektor vastagon szedett dőlt kisbetű (a, b), míg a tenzor vastagon szedett dőlt nagybetű (A, T). Ezen meny-nyiségeknek megfelelő mátrixos jelölésben vastagon szedett álló kis, illetve nagy betű szerepel (a, b, A, T).
Miskolc, 2005. október 30.
A szerzők
TARTALOMJEGYZÉK
1. VÉGESELEM-MÓDSZER ALAPJAI (DR. NÁNDORI FRIGYES) 1 1.1. Ismétlés 1 1.2. Rugalmasságtani összefoglaló 3
2. KÖZELÍTŐ SZÁMÍTÁS ALAPJAI (DR. NÁNDORI FRIGYES) 9 2.1. Lagrange-féle variációs elv 9 2.2. Ritz-módszer 10 2.3. Ritz-módszer alkalmazása 10
3. KOMPATIBILIS ELEMMODELL (DR. NÁNDORI FRIGYES) 15 3.1. Több testből álló rendszer 15 3.2. Elemek, közelítések 17
4. ELEMI ÉS SZERKEZETI MÁTRIXOK (DR. NÁNDORI FRIGYES) 21 4.1. Elem teljes potenciális energiája 21 4.2. Elemek illesztése 22 4.3. Kinematikai előírás 23
5. EGYVÁLTOZÓS FELADATOK, SÍKBELI RÚDSZERKEZETEK (DR. PÁCZELT ISTVÁN) 27
5.1. Bernoulli – féle hipotézis, variációs egyenletek 27 5.2. Elmozdulásmező közelítése 30 5.3. Merevségi mátrix, redukált terhelési vektorok 31 5.4. A hőhatás figyelembevétele 33 5.5. Rugalmas ágyazás figyelembevétele 34
6. EGYVÁLTOZÓS FELADATOK, TÉRBELI RÚDSZERKEZETEK (DR. PÁCZELT ISTVÁN) 37 7. KÉTVÁLTOZÓS RUGALMASSÁGTANI FELADATOK
VIZSGÁLATA IZOPARAMETRIKUS ELEMEKKEL (DR. SÁRKÖZI
LÁSZLÓ) 43 7.1. Négycsomópontú elem 43 7.2. Nyolc-csomópontú elem 46 7.3. A háromcsomópontú és a hatcsomópontú elemek 46 7.4. Az alakváltozási vektor előállítása 47
8. A KÉTVÁLTOZÓS FELADATTÍPUSOK MEGOLDÁSI
LEHETŐSÉGE NUMERIKUS INTEGRÁLÁSSAL (DR. SÁRKÖZI
LÁSZLÓ) 51 8.1. Síkalakváltozás (SA) 51 8.2. Síkfeszültségi állapot (SF) 52 8.3. Általános Síkfeszültségi állapot (ÁSF) 53 8.4. Tengelyszimmetrikus alakváltozás (TSZ) 54 8.5. Az elemi merevségi mátrix és a redukált terhelési vektor
számítása 55 8.6. Numerikus integrálás 56
II VÉGESELEM-MÓDSZER ALAPJAI
9. LEMEZELMÉLET (DR. NÁNDORI FRIGYES) 61 9.1. Klasszikus Lemez modell 61
10. IZOPARAMETRIKUS LEMEZELEM (DR. NÁNDORI FRIGYES) 69 10.1. Potenciális energia 69 10.2. Izoparametrikus elem 70 10.3. Kirchhoff-féle vékony lemez 73
11. TÉRBELI ELEMEK (DR. SZABÓ TAMÁS) 75 11.1. Az alakfüggvények és a közelítés 75 11.2. Alakváltozások és feszültségek 78 11.3. A Merevségi mátrix 80 11.4. Tehervektorok 80
12. A MEGOLDÁS ÉS A HIBA (DR. SZABÓ TAMÁS) 83 12.1. Az együttható Mátrix szerkezete 83 12.2. Hibaanalízis 86
13. MODELLEZÉSI KÉRDÉSEK-1 (DR. PÁCZELT ISTVÁN) 91 13.1. Alszerkezettechnika 91 13.2. Adott elmozdulások figyelembevétele 93 13.3. Adott elmozdulásmezőben fennálló szakadás, kezdeti
hézag figyelembevétele 94 13.4. Excentrikus csatlakozás 96
14. MODELLEZÉSI KÉRDÉSEK-2 (DR. PÁCZELT ISTVÁN) 99 14.1. Ferdehatásvonalú támasz figyelembevétele 99 14.2. Periódikus szerkezet 102 14.3. Rugalmas ágyazás 102 14.4. Egyoldalú súrlódás nélküli érintkezés vizsgálata 103
15. AZ I-DEAS PROGRAMRENDSZER (BAKSA ATTILA) 107 15.1. Általános jellemzők: 107 15.2. Rajzolás az I-DEAS-ban 110 15.3. Végeselemes analízis 112
16. C–ÁLLVÁNY VIZSGÁLATA (BAKSA ATTILA) 115 16.1. Geometria létrehozása 116 16.2. Végeselemes modell 117 16.3. A feladat megoldása 120 16.4. Számítási eredmények 120
17. TENGELYSZIMMETRIKUS FELADAT ELEMZÉSE (DR. SZABÓ TAMÁS) 123
17.1. A peremértékfeladat 123 17.2. A geometria létrehozása 124 17.3. Végeselemes hálózás 125 17.4. peremfeltételek előírása 126 17.5. A feladat megoldása 128 17.6. Az eredmények kiértékelése 128
18. CSŐCSATLAKOZÁS VIZSGÁLATA (DR. SZABÓ TAMÁS) 131 18.1. A peremértékfeladat ismertetése 131 18.2. A geometria felépítése 132 18.3. Végeselemes hálózás 134
VÉGESELEM-MÓDSZER ALAPJAI III
18.4. Peremfeltételek előírása 134 18.5. A feladat megoldása 136 18.6. Az eredmények szemléltetése 136
19. TÉRBELI FELADAT MODELLEZÉSE (DLUHI KORNÉL) 139 19.1. A geometria előállítása 139 19.2. Peremfeltételek megadása 141 19.3. Végeselemes háló generálása 142 19.4. Feladat megoldása, eredmények kiértékelése 143 19.5. A háló finomítása 145
20. A LEKEREKÍTÉS HATÁSA (DLUHI KORNÉL) 147 20.1. A geometria módosítása 147 20.2. Peremfeltételek 149 20.3. Végeselemes háló 150 20.4. Eredmények 151
21. IRODALOMJEGYZÉK 155

IV VÉGESELEM-MÓDSZER ALAPJAI
1. VÉGESELEM-MÓDSZER ALAPJAI
1.1. ISMÉTLÉS
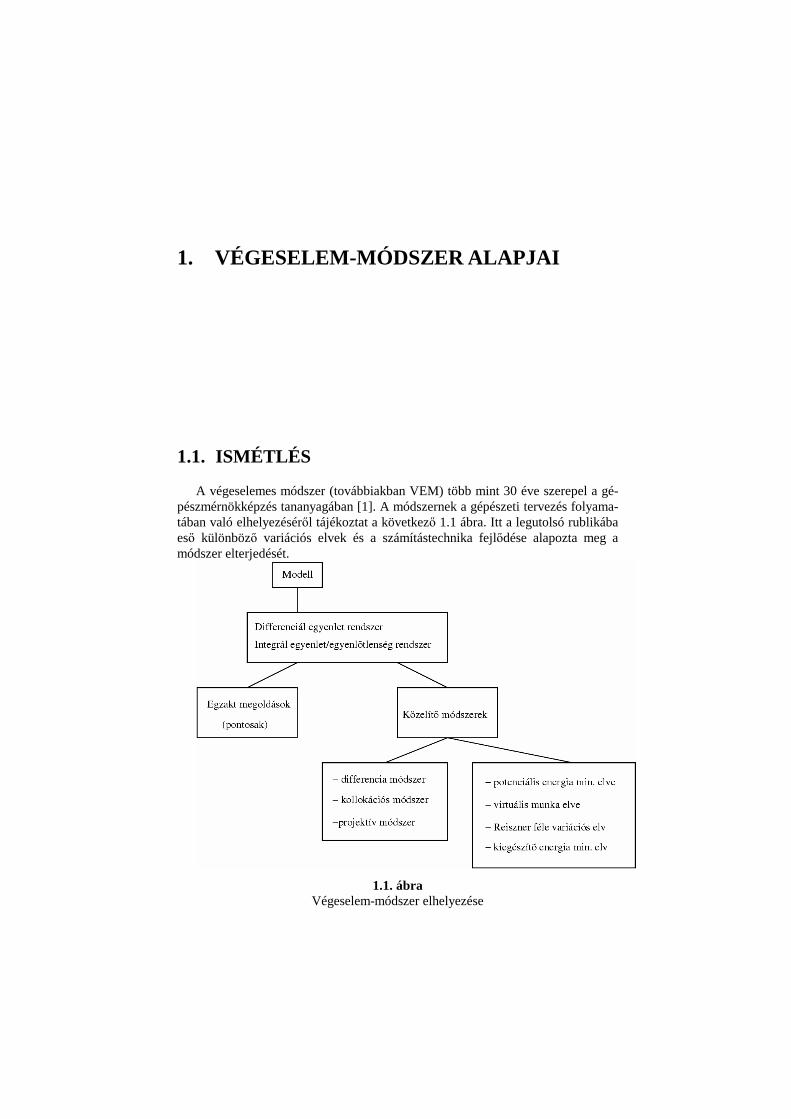
A végeselemes módszer (továbbiakban VEM) több mint 30 éve szerepel a gé-pészmérnökképzés tananyagában [1]. A módszernek a gépészeti tervezés folyama-tában való elhelyezéséről tájékoztat a következő 1.1 ábra. Itt a legutolsó rublikába eső különböző variációs elvek és a számítástechnika fejlődése alapozta meg a módszer elterjedését. Equation Chapter 1 Section 1
1.1. ábra Végeselem-módszer elhelyezése

2 VÉGESELEM-MÓDSZER ALAPJAI
A továbbiak röviden összefoglalják a későbbiekben felhasználásra kerülő ma-tematikai fogalmakat és összefüggéseket [4].
Függvény: ( )u x ahol u a függő, x a független változó.
funkcionál: ( , , )F x u u′ egy olyan függvény, melynek a független változói között
függvények esetleg deriváltjaik is szerepelnek. 1 2( , , `) `F x u u c u dx c u dx= +∫ ∫
variáció: uδ az u függvény variációja, lásd 1.2. ábra, értelmezés szerint ( )u v xδ = α ahol α: paraméter, amely a különböző variációknál más és más, v(x):
egy másik függvény.
1.2. ábra Variáció értelmezése
( ) `d dvdx dxu uδ α δ= = , azaz a deriválás és a variáció képzés sorrendje felcserél-
hető. A funkcionál első variációja a fenti F funkcionál esetén definició szerint:
def F FF u u
u uδ δ δ∂ ∂ ′= +
′∂ ∂
F F F
dF dx du dux u u
∂ ∂ ∂ ′= + + ′∂ ∂ ∂
2( ) ( )F u u F u F Fδ δ δ+ = + + +…
A variációképzés azonosságai közül érdemes az alábbiakra felhívni a figyel-met:
( )1 2 1 2 1 2F F F F F Fδ δ δ⋅ = ⋅ + ⋅
( ) ( )1 1 2 2 1
22 2
F F F F F
F F
δ δδ ⋅ − ⋅=
( ) ( )1n nF n F −= ⋅δ δ
( ) ( )
( ) ( )L L
u x dx u x dxδ δ∫ = ∫
Integrál átalakítási tételek közül az alábbiakra lesz szükség:

VÉGESELEM-MÓDSZER ALAPJAI 3
Gauss-Osztograszkij tételV A
B dV B n dA→
⊗∇ = ⊗∫ ∫
( ) [ ]00 0 0 0
L L L LLdw d dv
v dx v w dx wdx v w v wdxdx dx dx
′= ⋅ − = ⋅ −∫ ∫ ∫ ∫
A vektor és tenzor jellegű mechanikai jellemzők jelölésére egyaránt használjuk a szimbólikus és a mátrixos (általában (x,y,z) koordinátarendszerben kapott koor-dinátákból alkotott) jelölést. A vektor és mátrix jele vastagon szedett dőlt kis– illetve nagybetű. Mátrixos jelölésnél pedig álló helyzetű kis- illetve nagybetű.
Legyen A és B az (x,y,z) koordinátarendszerben adott 3 sorú és 3 oszlopú, azaz (3,3)-as tenzor:
,xx xy xz xx xy xz
yx yy yz yx yy yz
zx zy zz zx zy zz
a a a b b b
a a a b b b
a a a b b b
= =
Α B
A két tenzor kétszeres skaláris szorzása az alábbi módon értelmezett:
xx xx xy xy zz zza b a b a b⋅ ⋅ = ⋅ + ⋅ + + ⋅…A B
Ha T=A A akkor a tenzor szimmetrikus, ha pedig T= −B B akkor a tenzor aszimmetrikus
ha T=A A és =B c d , azaz a c és d vektorok általános szorzata
. .
. .
x x x y x z
y x
z x
c d c d c d
c d
c d
=
B
akkor ( )⋅ ⋅ ⋅ ⋅ ⋅ ⋅A B = A c o d = c A d .
1.2. RUGALMASSÁGTANI ÖSSZEFOGLALÓ
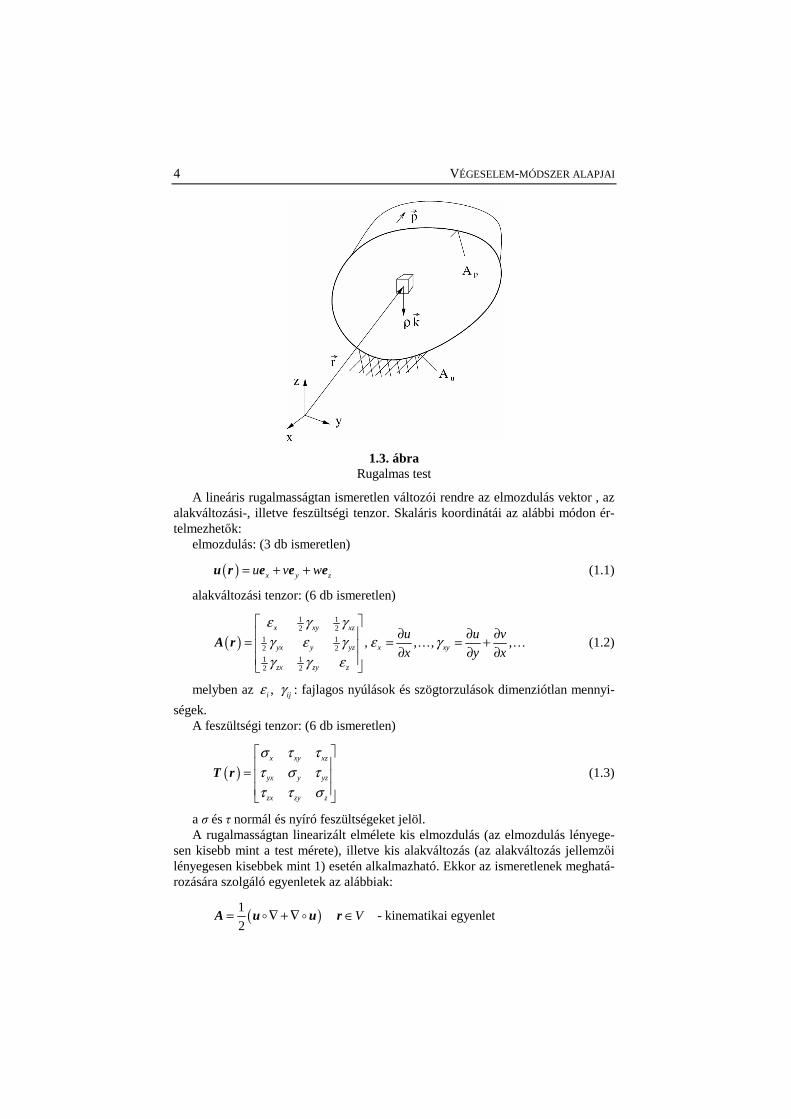
Tekintsünk egy V térfogatú lineárisan rugalmas térbeli testet, melyet A határoló felület vesz körül. Az A felület felbontható egy uA melyen az elmozdulás elő van
írva - és egy pA felületrészre, ahol pedig a terhelés előírt. ( )u pA A A= ∪ . A test
egy tetszőleges pontjába mutató helyvektor x y zx y z= + +r e e e . Lásd 1.3 ábrát.
4 VÉGESELEM-MÓDSZER ALAPJAI
1.3. ábra Rugalmas test
A lineáris rugalmasságtan ismeretlen változói rendre az elmozdulás vektor , az alakváltozási-, illetve feszültségi tenzor. Skaláris koordinátái az alábbi módon ér-telmezhetők:
elmozdulás: (3 db ismeretlen)
( ) x y zu v w= + +u r e e e (1.1)
alakváltozási tenzor: (6 db ismeretlen)
( )1 12 2
1 12 2
1 12 2
, , , ,x xy xz
yx y yz x xy
zx zy z
u u v
x y x
ε γ γγ ε γ ε γγ γ ε
∂ ∂ ∂ = = = + ∂ ∂ ∂
… …A r (1.2)
melyben az ,i ijε γ : fajlagos nyúlások és szögtorzulások dimenziótlan mennyi-
ségek. A feszültségi tenzor: (6 db ismeretlen)
( )x xy xz
yx y yz
zx zy z
σ τ ττ σ ττ τ σ
=
T r (1.3)
a σ és τ normál és nyíró feszültségeket jelöl. A rugalmasságtan linearizált elmélete kis elmozdulás (az elmozdulás lényege-
sen kisebb mint a test mérete), illetve kis alakváltozás (az alakváltozás jellemzői lényegesen kisebbek mint 1) esetén alkalmazható. Ekkor az ismeretlenek meghatá-rozására szolgáló egyenletek az alábbiak:
( )1- kinematikai egyenlet
2V= ∇ + ∇ ∈A u u r

VÉGESELEM-MÓDSZER ALAPJAI 5
- anyagegyenletV= ⋅⋅ ∈T D A r (1.4)
illetve a
2 - Hook-törvény1 2 IG A V
= + ⋅ ∈ −
νν
T A I r
- egyensúlyi egyenlet⋅∇ + ⋅ =ρT k 0
Peremfeltételek:
0 - kinematikai peremfeltételuA= ∈u u r
- dinamikai peremfeltételpA⋅ = ∈T n p r
Itt G – az anyag csúsztató rugalmassági modulusa, ν - a Poisson tényező, ρ a tömegsűrűség, k pedig egységvektor. IA az alakváltozási tenzor első skalár invari-
ánsa, D az anyagjellemzők később részletezett mátrixa. A rugalmasságtan feladata a fenti differenciálegyenlet-renszer megoldása. Kö-
zelítő számítás esetén: elmozdulásra alapozva a számítást a fenti egyenleteket kell egymást követve kielégíteni. Ha pedig közelítő feszültségekből indulunk ki, akkor a kinematikai egyenletek helyett a vele egyenértékű kompatibilitási egyenletet kell biztosítani, amely a következő alakban írható:
∇× ×∇ =A 0
1.2.1. Energia elvek, variációs módszerek A továbbiak először a fenti differenciálegyenlet-rendszer néhány egyenletét ki-
elégítő, speciális mezőket értelmeznek. Kinematikailag lehetséges elmozdulásmező alatt olyan elmozdulást értünk
amely kielégíti a kinematikai peremfeltételt, folytonos és deriválható. Jele: *
u .
Származtatható belőle egy kinematikailag lehetséges alakváltozás: ∗A
1
,2 uA
∗ ∗ ∗ ∗ = ∇ + ∇ ∇ × ×∇ = ∈
A u u A 0 r
azaz ∗A kinematikailag lehetséges alakváltozás a geometriai egyenletet kielégí-
ti és egyúttal kompatibilis.
Statikailag lehetséges feszültségmező alatt olyan T jelű feszültséget értünk, amely kielégíti az egyensúlyi egyenletet és a dinamikai peremfeltételt, azaz:
,pA Vρ⋅ = ∈ ⋅∇ + ⋅ = ∈T n p r T k 0 r
Származtatható belőle egy statikailag lehetséges alakváltozás: 1−= ⋅⋅A D T de ez általában nem kompatibilis, és a kinematikai peremfeltétel sem biztosított. Az-az:

6 VÉGESELEM-MÓDSZER ALAPJAI
V∇× ×∇ ≠ ∈A 0 r
0 uA≠ ∈u u r .
Virtuális munka elve: A fentiekben bevezetett statikailag illetve kinematikailag lehetséges feszültség-
és elmozdulásmezőből kiindulva,az alábbi átalakítások tehetők:
,V
ρ∗
⋅∇ + ⋅ = ⋅ ∫T k 0 u
( )V V
dV dVρ∗ ∗⋅ ⋅∇ + ⋅ ⋅ =∫ ∫u T u k 0
( )∗ ∗ ∗ ⋅ ⋅∇ = ⋅ ⋅∇ − ∇ ⋅⋅
u T u T u T ,
1 1
2 2
T∗ ∗∗
∗ ∗ ∗ ∗ ∗
=−
∇ = ∇ + ∇ + ∇ − ∇
A
u u u u u
Ψ Ψ
,
( ) , 0∗ ∗ ∗ ∗ ⋅ ⋅∇ = ⋅ ⋅∇ − ⋅⋅ ⋅ ⋅ =
u T u T A T TΨ
A Gauss-Osztograszkij tétel alkalmazásával, nyerjük a virtuális munka elve legáltalánosabb alakját:
u pV A A A V
dV dA dVρ∗ ∗ ∗
= +
⋅ ⋅ = ⋅ ⋅ + ⋅ ⋅∫ ∫ ∫A T u T n u k (1.5)
A virtális munka elv variációs alakjának felírásához először értelmezzük az elmozdulás mező variációját (virtuális elmozdulást), melynek jele: δ u
, : egzakt elmozdulásδ∗
= −u u u u
Nyilvánvalóan teljesül: 0δ =u , ha uA∈r . Hasonlóan értelmezhető az alak-
változás variációja:
( ) ( )
( ) ( )
1
2
1 1
2 2δ
δ δ δ
δ δ
∗ ∗ = = + = + ∇ + ∇ + =
= ∇ + ∇ + ∇ + ∇
A A
A A u A u u u u u u
u u u u

VÉGESELEM-MÓDSZER ALAPJAI 7
Azaz:
δ∗
= +A A A
A virtuális munka elv egzakt u elmozdulással a következő alakú:
A V V
dA dV dVρ⋅ ⋅ + ⋅ ⋅ = ⋅⋅∫ ∫ ∫u T n u k A T
Ezt kivonva a (1.5) egyenletből kiadódik a virtuális munka elv variációs alak-ja:
pV V A
dV dV dAδ δ ρ δ⋅⋅ = ⋅ ⋅ + ⋅∫ ∫ ∫A T u k u p . (1.6)
A baloldal, az ú.n. belsőerők alakváltozási munkájának variációja megegyezik a jobboldalon felírt ú.n. külső erők virtuális munkájával.
A T mező helyett szabad (nem föltétlen statikailag lehetséges) mezőt feltéte-lezve az elv az alábbi alakban is megfogalmazható: Ha az (1.6) tetszőleges elmoz-dulás variáció mellett fennáll, akkor T mező statikailag lehetséges. Potenciális energia minimuma elv származtatása:
Egy ∗u kinematikailag lehetséges elmozdulásmezőből kiindulva a megfelelő
egyenletek segítségével származtatható az ∗A alakváltozási és a
∗T feszültségi
tenzormező. A potenciális energia értelmezése a következő:
: : alakváltozási energia külső erők (virtuális ) munkája
1
2p
k
V V A
U W
dV dV dAρ
∗ ∗
∗ ∗ ∗ ∗ ∗ ∗ Π = Π = ⋅⋅ − ⋅ ⋅ − ⋅ ∫ ∫ ∫u A T u k u p (1.7)
A potenciális energia minimuma elv szerint a kinematikailag lehetséges elmoz-dulás mezőkhöz tartozó potenciális energiák az egzakt megoldásnál minimummal rendelkeznek, azaz:
( )∗ Π ≥ Π
u u (1.8)
egyenlőség akkor áll fenn, ha ∗
≡u u . Az elv az alábbi lépések és átalakítások alap-ján bizonyítható.
( )δ∗ ∗ Π = Π = Π +
u u u , ahol δ
∗= +A A A ,
∗ ∗= ⋅⋅T D A

8 VÉGESELEM-MÓDSZER ALAPJAI
( ) ( ) ( ) ( ) ( )
( ) :
:
egzakt értékhez tartozó
a potenciáli
1
2
1
2
p
p
p
V V A
V V A
V V A
dV dV dA
dV dV dA
dV dV dA
δ
δ δ δ δ ρ δ
ρ
δ δ ρ δ
Π
Π
Π + = + ⋅⋅ ⋅ ⋅ + − + ⋅ ⋅ − + ⋅ =
= ⋅⋅ ⋅ ⋅ − ⋅ ⋅ − ⋅ +
+ ⋅⋅ ⋅ ⋅ − ⋅ ⋅ − ⋅
∫ ∫ ∫
∫ ∫ ∫
∫ ∫ ∫
T
u
T
u u A A D A A u u k u u p
A D A u k u p
A D A u k u p
2 0,
s energia első variációja
1
2 V
dV
δ
δ
δ δ
Π ≥
+
+ ⋅⋅ ⋅ ⋅∫T
A D A
( ) ( )0
2δ δ δ=
Π + = Π + Π+ Πu u u
Az (1.6) virtuális munka elv szerint: 0δΠ = vagyis valóban fennáll az (1.8) alatti egyenlőtlenség. A variáció zérus előírását a variációszámítás stacionaritási feltételének nevezzük.

2. KÖZELÍTŐ SZÁMÍTÁS ALAPJAI
2.1. LAGRANGE-FÉLE VARIÁCIÓS ELV
A Lagrange-féle variációs elv szerint a teljes potenciális energia variácója a megoldásnál zérus. Ennek igazolására induljunk ki a variáció értelmezéséből!
0pV V A
dV dV dAδ δ δ ρ δΠ = ⋅⋅ − ⋅ ⋅ − ⋅ =∫ ∫ ∫A T u k u p
( ) ( )1 1
2 2δ δ
δ δ δ δ δ∇ = ∇ + ∇ + ∇ − ∇
A
u u u u u
Ψ
Miután Tδ δ= − ΨΨ
Equation Chapter 2 Section 1
( ) ( ) ( )δ δ δ δ∇ ⋅⋅ = ∇ ⋅ ⋅ − ⋅ ⋅∇ = ⋅⋅u T T u u T A T
( ) 0p u pA A A V V A
dA dV dV dAδ δ δ ρ δ= +
⋅ ⋅ − ⋅ ⋅∇ − ⋅ − ⋅ =∫ ∫ ∫ ∫n T u u T u k u p
továbbá az uA felületen δ =u 0 így az előző egyenlet formailag a következő alak-
ra hozható:
( ) ( )0 : 0 : egyensúlyi egyenlet dinamikai peremfeltétel
0pV A
dV dAδ ρ δ= =
− ⋅ ⋅∇ + ⋅ + ⋅ ⋅ − =∫ ∫u T k u n T p
Az elv tehát tetszőleges variáció esetén biztosítja az egyensúlyi egyenlet és a dinamikai peremfeltétel teljesülését. Általában u -t közelítjük úgy, hogy adott függvények és ismeretlen paraméterek kombinációját vesszük, majd így írjuk elő a variáció eltünését. Ez a feltétel mindig ad egy lehetséges legjobb megoldást. A módszer célja olyan mező kiválasztása amely az egyensúlyi egyenletet, illetve a dinamikai peremfeltételt a lehető legjobban biztosítja [1].

10 VÉGESELEM-MÓDSZER ALAPJAI
2.2. RITZ-MÓDSZER
A potenciáis energia minimuma elvet alkalmazva, legyen a kinematikailag le-hetséges elmozdulás a következő:
( ) ( ) ( )0 21 1 1
N N N
i i x N j j y N k k zi j k
c c c eϕ ψ χ∗ ∗
+ += = =
= + ⋅ + +∑ ∑ ∑u u r e r e r (2.1)
ahol 0
∗u kielégíti a peremfeltételt,
0i i iϕ ψ χ= = = , uA∈r , 1, ,i N= …
Ezzel potenciális energia kifejezés egy többváltozós valós függvény.
( )1 2 3, , , Nc c cΠ = Π …
A variáció eltűnésének feltétele az alábbi alakban írható
1 2 31 2 3
0NN
c c cc c c
δ δ δ δ∂Π ∂Π ∂ΠΠ = + + + =∂ ∂ ∂
…
Itt icδ tetszőleges kell hogy legyen! Ezáltal kapunk egy lineáris egyenletrend-
szert a paraméterekre nézve. Bevezetve az ismeretlenek oszlopvektorát
[ ]1 2 3T
Nc c c=c
a stacionaritási feltétel tömör formában is írható:
Tδ δ ∂Π∂Π = =cc 0
1 2 3
0, 1, 3N
T
c c ci
i Nc
∂Π ∂Π ∂Π∂ ∂ ∂
∂Π ∂Π = = ⇔ = = ∂ ∂0
c… … (2.2)
2.3. RITZ-MÓDSZER ALKALMAZÁSA
Ritz-módszer bemutatása példákon keresztül:
2.1. ábra Mintapélda

VÉGESELEM-MÓDSZER ALAPJAI 11
A 2.2. ábrán látható húzott-nyomott rúd terhelése p hosszmentén megoszló
súlyterhelés, és LF koncentrált erő. A rúd pontjainak rúdirányú elmozdulása
( )u x , csak a keresztmetszet x koordinátájától függ. A rugalmasságtan általános
egyenletei ebben az egyváltozós esetben az alábbi alakra egyszerűsödnek:
- kinematikai egyenletx
u duu
x dxε ∂ ′= = =
∂
- Hooke-törvényx xE E uσ ε ′= ⋅ = ⋅
0 - egyensúlyi egyenlet dN
pdx
+ =
Kinematikai peremfeltétel: ( )0 0u x = = .A dinamikai peremfeltétel a rúdvég
koncentrált terhelésének és rugós megtámasztásának megfelelően: xN A σ= ⋅ az-
az, ( ) |L L c L LN x L A E u F F F c u′= = ⋅ ⋅ = + = − ⋅
A potenciális energia ebben az esetben:
( ) 2
0
A külső terhelések munkájaA rúd belső alakváltozási energiája rugóenergia
1 1
2 2
L
x x L L LAdxV
u dV u p dx u F c uε σΠ = ⋅ − − ⋅ + ⋅∫ ∫
( )2 2
0 0
1 1
2 2
L L
L L LA E u dx u p dx u F c u′Π = − − ⋅ + ⋅∫ ∫
Ennek képezve a variációját kapjuk, hogy
( )( )2
0 0
0 2L L
L L L LA E u u dx u p dx c u u u F u u uδ δ δ δ δ δ δ′ ′ ′ ′ ′Π = − ⋅ + ⋅ ⋅ − ⋅ = =∫ ∫
[ ] ( )00 0
0L L
L
L L LA E u u A E u u dx u p dx c u u u Fδ δ δ δ δ δ′′ ′Π = ⋅ ⋅ ⋅ − ⋅ ⋅ − ⋅ − ⋅ ⋅ − ⋅ =∫ ∫
( ) ( ) ( )0
0 :
0
egyensúlyi egy.: dinamikai peremfeltétel
0
LNL
L L LLA E u p u dx A E u F c u uδ δ δ′
=
=
′ ′Π = − ⋅ ⋅ + + ⋅ ⋅ − − ⋅ =
∫
Közelítő megoldás kereséséhez induljunk ki az alábbi másodfokú polinomból:
( ) 20 1 2u x c c x c x= + +
Kinematikailag lehetséges, ha folytonos és deriválható, továbbá ha kielégíti a ki-nematikai peremfeltételt, azaz u(0)=0, amiből következik, hogy 0 0c = azaz

12 VÉGESELEM-MÓDSZER ALAPJAI
( ) 21 2u x c x c x
∗= +
( ) ( ) ( ) ( )
2 2
0 0
22 2 2 21 2 1 2 1 2 1 2
0 0
2 3 2 32 21 1 2 2 1 2
2 2 31 1 2
1 1
2 2
1 12
2 2
14 4
2 2 3 2 3
12
2
L L
L L L
L L
L
u A E u dx u pdx c u u F
A E c c x dx c x c x pdx c c L c L c L c L F
L L L LA E c L c c c p c c
c c L c c L
′∗ ∗ ∗ ∗ ∗ ∗ Π = ⋅ ⋅ − ⋅ + ⋅ − ⋅ =
= ⋅ + − + ⋅ + ⋅ + − + ⋅ =
= ⋅ ⋅ + + − ⋅ + +
+ + +
∫ ∫
∫ ∫
( )2 4 22 1 2 Lc L c L c L F − + ⋅
A variációképzéssel:
1 21 2 1 2
0 0, 0c cc c c c
δ δ δ∂Π ∂Π ∂Π ∂ΠΠ = + = ⇒ = =∂ ∂ ∂ ∂
azaz kifejtve:
22 2 3
1 2 1 21
32 3 3 4 2
1 2 1 22
02
40
3 3
L
L
LAELc AEL c p cL c cL c LF
c
LAEL c AEL c p cc L cL c L F
c
∂Π = + − + + − =∂
∂Π = + − + + − =∂
ugyanezt mátrixos formában felírva:
2
3
2 2 31 1 2
2 3 3 44 22 23 3
LL
LL
p LFc cL L L LAE c
c cL L L L p L F
+ + = +
(2.3)
Speciális esetként először vizsgáljuk meg azt az esetet, amikor csak koncentrált erővel terhelt a rúd:
2.3. ábra Koncetrált terhelés
Ekkor a (2.3) egyenlet megoldása:
2 0c = , és 1LF
cA E
=⋅
.
Ebben az esetben a lehetséges elmozdulás a következő alakban adódik

VÉGESELEM-MÓDSZER ALAPJAI 13
LFu x
AE
∗=
melyből látható, hogy a Π minimum elv érvényben van hiszen teljesül:
dinamikai peremfeltétel
0 áll. egyensúlyi egyenlet
L
L L
N AE u F
dNN N F
dx
∗ ∗′= =
= → = =
Másik speciális esetként vizsgáljuk meg azt az esetet amikor csak megoszló terheléssel terhelt a rúd
2.3. ábra
Megoszló terhelés
Ekkor a (2.3) egyenlet az alábbi alakban írható
1 2
1 2
24
3 3
pLc Lc
AEpL
c LcAE
+ =
+ =
melyből:
1 2,2
p L pc c
A E A E
⋅= = −⋅ ⋅
Ebben az esetben a lehetséges elmozdulás a következő alakban adódik
2
2
pL pu x x
AE A E
∗= ⋅ − ⋅
⋅
A kapott megoldás egzakt, mivel az egyensúlyi egyenletet, illetve a dinamikai peremfeltételt kielégíti.
( )N AE u pL px p L x∗ ∗
′= = − = −
Hasonló módon belátható , hogy a legáltalánosabb esetben, amikor rugalmas megtámasztású a rúd vége szintén egzakt megoldást kapunk. Ha viszont a megosz-ló terhelés jellege megváltozik –nem konstans, vagy szakaszonként különböző állandó- akkor a fenti másodfokú közelítés már nem vezet egzakt megoldásra.

3. KOMPATIBILIS ELEMMODELL
3.1. TÖBB TESTBŐL ÁLLÓ RENDSZER
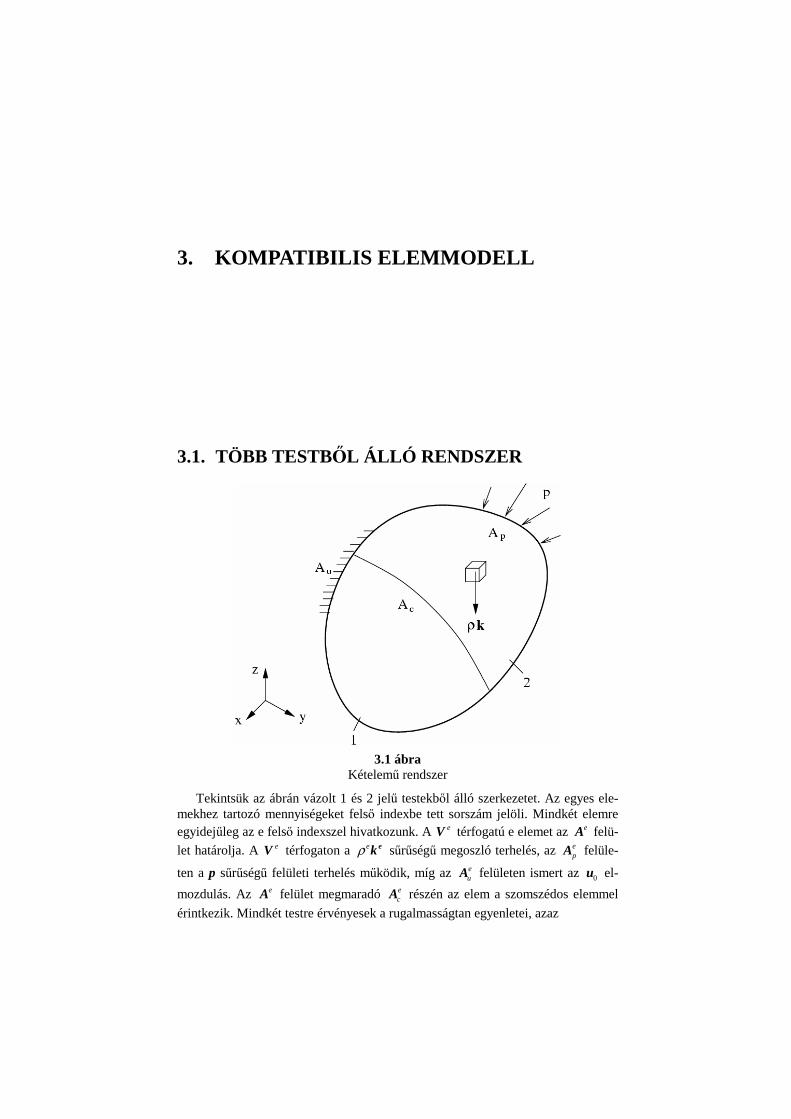
3.1 ábra
Kételemű rendszer
Tekintsük az ábrán vázolt 1 és 2 jelű testekből álló szerkezetet. Az egyes ele-mekhez tartozó mennyiségeket felső indexbe tett sorszám jelöli. Mindkét elemre egyidejűleg az e felső indexszel hivatkozunk. A eV térfogatú e elemet az eA felü-
let határolja. A eV térfogaton a eρ ek sűrűségű megoszló terhelés, az epA felüle-
ten a p sűrűségű felületi terhelés működik, míg az euA felületen ismert az 0u el-
mozdulás. Az eA felület megmaradó ecA részén az elem a szomszédos elemmel
érintkezik. Mindkét testre érvényesek a rugalmasságtan egyenletei, azaz

16 VÉGESELEM-MÓDSZER ALAPJAI
Equation Chapter 3 Section 1
( )1- kinematikai egyenlet
2V= ∇ + ∇ ∈e e eA u u r (3.1)
- anyagegyenlet= ⋅⋅ ∈ eVe e eT D A r (3.2)
0 egyensúlyi egyenlete e er Vρ∇ + = ∈ −T k (3.3)
mint mezőegyenlet, továbbá érvényesek a peremfeltételek [1]:
kinematikai peremfeltétel
dinamikai peremfeltétel
e e0 u
e e e ep
A
A
= ∈ −
⋅ = ∈ −
u u r
T u p r (3.4)
illetve az ecA felületen az illesztési feltételek:
kinematikai
dinamikai
1 2
1 1 2 2
=
⋅ = ⋅
u u
T n T n (3.5)
A dinamikai illesztési feltétel a közös érintkezési felület pontjainak kölcsönha-tását fejezi ki. Ennek értelmében az egymásra átadódó feszültségek egymással el-lentétesek. Itt 1n és 2n a testekből kifelé mutató normálvektorok.
Vizsgáljuk meg hogy ebben az esetben hogyan használható a potenciális ener-gia minimuma elv, illetve a megfelelő variációs elv.
Tételezzük fel, hogy az ∗eu elmozdulásmező kinematikailag lehetséges, illetve
teljesíti a kinematikai illesztési feltételt Feltesszük továbbá, hogy
1 2 12cAδ δ= ∈u u r
A két testre vonatkozó variációs elv felépítéséhez induljunk ki a teljes potenci-ális energiák variációjából [3]:
2
1
0e ek
e
U Wδ δ=
− =∑
2
1
.. 0 e e e
e ek
e e e e
e V V A
U W
dV dV dA
δ δ
δ δ ρ δ=
− ⋅ ⋅ − ⋅ =∑ ∫ ∫ ∫A T u k u p (3.6)
Az első integrál az alábbi átalakítások alapján átírható:
( ) ( ) ( ) ..
..
e e e
e e
e e e
V V V
A V
dV dV dV
dA dV
δ δ
δ δ δ
δ δ+
⋅ ⋅∇ = ⋅ ⋅∇ − ∇ =
= ⋅ ⋅ −
∫ ∫ ∫
∫ ∫
e
A Ψ
e e e e e
u T u T u T
u T n A T
innen

VÉGESELEM-MÓDSZER ALAPJAI 17
( ).. = ⋅ ⋅ − ⋅ ⋅∇∫ ∫ ∫
e e e
e
V A V
dV dA dVδ δ δe e e e e eA T u T n u T
ahol 0
e e e eu p cA A A A
δ =
= + +u
A kapott formulákat visszaírva és a tagokat átrendezve:
[ ] ( )
( )12
2
1
0
e ep
c
e ee e
e V A
1 1 2 2
A
dV dA
dA
δ ρ δ
δ
=
⋅ ⋅∇ + − ⋅ ⋅ − −
− ⋅ ⋅ + ⋅ =
∑ ∫ ∫
∫
u T k u T n p
u T n T n
Ennek alapján a variációs elv biztosítja az egyensúlyi egyenlet, a dinamikai pe-rem-, és illesztési feltétel teljesülését
3.2. ELEMEK, KÖZELÍTÉSEK
Végeselem-módszer alkalmazásakor első lépésben a tartományt véges kiterje-désű részekre u.n. elemekre bontjuk. Az elemeket sorszámozzuk. Elemenként kü-lön – külön közelítjük az elmozdulást úgy, hogy az a teljes testre kinematikailag lehetséges elmozdulássá legyen illeszthető. Ez azt jelenti, hogy kinematikailag lehetséges elmozdulás közelítésből indulunk ki, azaz teljesül az elemek határán az illesztési vagy kinematikai peremfeltétel, továbbá a deriváltak szakaszonként (ele-menként) folytonosak. Ebben a szakaszban feltételezzük, hogy az elmozdulásmező elemenként a hely (x,y,z)=x vonatkoztatási koordinátarendszer függvényeként áll elő. Később látni fogjuk, hogy gyakran érdemes az elemhez kötött helyi koordináta – rendszert alkalmazni. Illesztés céljából az elemek határán jelöljünk ki pontokat u.n. csomópontokat. Ezeket is sorszámozzuk. Az egymáshoz kapcsolódó elemek egybeeső csomópontjainak elmozdulásait fogjuk azonossá tenni. A csomópontok számát és a közelítés típusát úgy kell megválasztani, hogy a csomóponti elmozdu-lások azonossága biztosítsa a teljes érintkezési tartományon a folytonosságot. Az így felépített elemet kompatibilis elmozdulási elemnek fogjuk nevezni [1].
Az előzőkkel összhangban egy e – jelű elem x rendszerbeli u elmozdulás-mezőjét
( ) ( )e e e e e e= = =u u x Φ x c Φ c (3.7)
alakban közelítjük, ahol
T T T
e T T T
T T T
=
0 0
0 0
0 0
ϕΦ ϕ
ϕ (3.8)
az alapfüggvénymátrix, ec az ismeretlen paraméterek vektora, ( )T xϕ pedig rend-
szerint hatványfüggvényeket tartalmazó sorvektor:

18 VÉGESELEM-MÓDSZER ALAPJAI
2 2( ) 1T x y z x y = x …ϕ (3.9)
A továbbiakban az a cél hogy az állandók helyett áttérjünk a csomópontok el-mozdulásaira. Legyen az e jelű i, j, k, csomópontokkal rendelkező elem csomópon-ti elmozdulásainak vektora a következő:
u
, v
w
eei
iee ej
i iek
i
= =
q
qq q
q (3.10)
Feltéve, hogy a csomóponti elmozdulások koordinátáinak száma megegyezik a közelítésben felvett paraméterek számával a ec vektor kifejezhető eq vektorral az
alábbiak szerint:
-1
-1e ( )ee e e e ei
= = ≡
Φ xc q G q V q (3.11)
itt a felsőindexben szereplő -1 az invertálásra utal. Természetesen lehetőség van arra is, hogy az ismeretlen paraméterek száma nagyobb legyen mint a csomóponti elmozdulás koordináták száma. Ekkor más technikára (u.n. pótlólagos állandók kijelölése, vagy belső csomópontok értelmezése) van szükség. Ebben a fejezetben ettől eltekintünk. (3.11) alapján a (3.7) közelítés az alábbi alakban írható:
( ) ( ) ( )e e e e e e e e e= = ≡ =u u x Φ x V q N x q N q (3.12)
ahol az eN mátrixot az elem approximációs mátrixának nevezzük. Nyilvánvaló , hogy eN a csomópontok szerint particionálható:
ee
i j k = N N N N … (3.13)
Vizsgáljuk meg, hogy az eN mátrixnak milyen feltételeket kell kielégíteni. Nyilvánvaló, hogy az elmozdulásnak a csomópontban meg kell egyeznie a csomó-ponti elmozdulásvektorral, azaz
( ) , ( )e ei i i j= =N x E N x 0
itt E az egységmátrix, 0 pedig a nullmátrix. Természetes elvárás, hogy az elmozdulás közelítése tartalmazza az un. merev-
testszerű mozgást, azaz az eltolásra és a forgásra zérus alakváltozási energiát ad-jon.
További elvárás, hogy az elem térfogati és torzulási energiáját külön-külön le-hessen számolni.
Mivel a közelítő elmozdulásnak kinematikailag lehetségesnek kell lenni ez azt jelenti, hogy az adott előírásokat a csomóponti paraméterek megválasztásával kell biztosítani (a deriválhatóság a fenti polinomokra mindig teljesül).
Az elmozdulásmező közelítéséből kiindulva származtathatók az elem további szilárdsági jellemzői.

VÉGESELEM-MÓDSZER ALAPJAI 19
Az alakváltozási tenzor szimmetriáját felhasználva a tenzor elemeiből 6 méretű vektor állítható elő:
e
0 0
0 0
0 0
0
0
0
e
e
x
ey
z
xy
yz
xz
ux xvy ywz z
u vy x y xv wz y z yw ux z x z
u
v
w
εεεγγγ
∂ ∂∂ ∂∂ ∂∂ ∂∂ ∂∂ ∂
∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂
⇒ = = = ⋅ = ⋅
+
+
+
euA ε
∂
∂
e
e e e= ⋅ ⋅ = ⋅e e
B
ε N q B q∂ (3.14)
ahol a eB matrix is felbontható a csomópontok szerint:
e e e ei j k = B B B B …
Feszültségmező leírására hasonlóan értelmezhető a 6 méretű feszültségvektor:
Tx y z xy yz xzσ σ σ τ τ τ ⇒ = T σ (3.15)
illetve a Hooke törvény alapján felírható csomóponti elmozdulásvektorral is:
e e= ⋅ = ⋅ ⋅ eD D B qεεσ (3.16)
ahol D az anyagjellemzők mátrixa. Térbeli izotróp rugalmas anyagra:
1 2 2
2 1 2
2 2 1
3
3
3
0 0 0
0 0 0
0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
c c c
c c c
c c c
c
c
c
=
D
szerkezetű, ahol
( )( ) ( )( ) ( )1 2 3
1
1 1 2 1 1 2 2 1
Ec E c E c G
ν νν ν ν ν ν
−= = = =+ − + − +
A későbbiek miatt érdemes a terhelési vektorokat is oszlopvektorba rendezni.

20 VÉGESELEM-MÓDSZER ALAPJAI
A peremen és a térfogaton megoszló terhelések oszlopvektorai a következők:
,
e e
x xe e
y y
z z
p k
p k
p k
ρ ⇒ = ρ ⇒ ρ = ρ ρ
p kp k
A végeselem-módszer másik fontos lépése egy hibaelv megválasztása, amely lehetővé teszi az állandók meghatározását. Hibaelvként a potenciális energia mi-nimuma elvhez tartozó variációs elvet választjuk.

4. ELEMI ÉS SZERKEZETI MÁTRIXOK
4.1. ELEM TELJES POTENCIÁLIS ENERGIÁJA
A továbbiakban előállítjuk az elem potenciális energiáját a közelítő mezők fel-használásával. Az előző fejezetben bevezetett vektorokkal az e jelű elemre:
1
2 e e ep
e eT e e eT e eT
V A V
dV dA dVΠ = − − ρ∫ ∫ ∫ε D ε u p u k
majd a csomóponti elmozdulásokat bevezetve:
1
2 e e ep
e eT eT e e e eT eT eT eT
V A V
dV dA dVΠ = − − ρ∫ ∫ ∫q B D B q q B p q B k
végül a csomóponti elmozdulásvektort kiemelve az alábbi tömör alak írható [1]:
1
2e eT e e eT eΠ = q K q - q f Equation Chapter 4 Section 1(4.1)
Ebben a kifejezésben előforduló eK elemi merevségi mátrix és ef elemi terhelési vektor az alábbi szerkezetű:
e e
eT e ei ii ij
e eT e e eT e e e e ej i i ji jj
V V
dV dV
= =
∫ ∫B K K
K = B D B B D B B K K
…… …
e e ep kρf = f + f
p ,e ep p
e eT e e eT ek
A A
dA dAρ= = ρ∫ ∫f N p f N k

22 VÉGESELEM-MÓDSZER ALAPJAI
Nyilvánvaló , hogy a merevségi mátrix szimmetrikus, továbbá a merevségi és terhelési mátrix csomópontok szerint particionálható. Az elem merevségi mátrixa az elem alakváltozási energiájával kapcsolatos. Ezért ha a eq az elem merevtest-
szerű mozgását írja le, akkor az alakváltozási energia zérus, egyébként pedig pozi-tív:
0eT e e ≥q K q
amiből az következik, hogy a mátrix elfajuló.
4.2. ELEMEK ILLESZTÉSE
Elemek illesztését a közös csomópontba eső elmozdulások azonosságával biz-tosítjuk. Legyen példaként az i jelű csomopontokba befutó elemek jele rendre e, e+1 illetve k, s. Ekkor az illesztés szerint [1]:
1e e k si i i i i
+= = = =q q q q q
vagyis azt is mondhatjuk, hogy a megkülönböztető felső index elhagyható. A vizsgált rendszer teljes potenciális energiája az elemek energiáinak összegeként ( Ne .az elemek száma) illetve a Wk koncentrált csomóponti erők munkájából áll
elő:
e1
Ne
12
qeTKqe qeTfe Wk 12
qTKq qTf
(4.2)
Ez a kifejezés értelmezi a szerkezet q csomóponti elmozdulás vektorát, terhelési vektorát, valamint a szerkezet K merevségi mátrixát. A szerkezet csomóponti terhelési és elmozdulási vektora az illesztési feltétel alap-ján
1 1
1
1 +
e
i
NeT e eT e e T e T sT s T k
i i i i i i i ie
T e e k si i i i i
+ +
=
+
= + + + + =
= + + + =
∑
T
f
q f q f q f q f q f
q f f f f q f
…
… …
ahol
1 2T T T T
ncs = q q q q…
1 2T T T T
ncs = f f f f…
ncs pedig a szerkezet csomópontjainak száma. A szerkezet merevségi mátrixa az energiával kapcsolatos:

VÉGESELEM-MÓDSZER ALAPJAI 23
1
eNeT e e e e
e=
=∑q K q q Kq
ahol
,
[ ] , 1, , eij ij ij
e i j
i j ncs∈
= = … = ∑K K K K (4.3)
Az összegzés alapján ij indexű blokk mindazon elemeknél szerepel amelyek tar-talmazzák egyidejűleg az i és a j jelű csomópontot. A csomóponti elmozdulások számítása a potenciális energia variációjának eltűnése alapján történik. Ennek megfelelően
qT
q 0
azaz
qTKq f 0
(4.4)
ahol δ q a kinematikai peremfeltételt kielégítő csomóponti elmozdulásvektor vari-
ációja.
4.3. KINEMATIKAI ELŐÍRÁS
Legyen j ju=q q adott csomóponti elmozdulás, mely azt jelenti, hogy j =q 0δ
Ekkor a (4.4) egyenletben a j-edik blokksor 0-val szorzódik. Cseréljük ki a j-edik csomópont elmozdulását az ismeretlen jR külső terheléssel amely nyilván reakció
erő:
K j1q1
ismert
K jjqju fj
ismeretlen
R j
Az ismert és az ismeretlen mennyiségek cseréjével kapjuk, hogy
11 1 1 1
1
j ju
i j j jj ju
− = −
K q f K q
K E R f K q
… …
… …
0
ahol E egységmátrix. Az egyenletrendszer mérete megmarad viszont a szimmet-ria elromlik. Ha a támasztóerő nem érdekes, akkor a j-edik blokksor főátlón kívüli elemei is nullázhatók, s így az együtthatómátrix szimmetriája helyreáll. Hasonló eredményre vezet a kinematikai előírás rugalmas megtámasztással való biztosítása. Ekkor megfelelően nagy rugóállandot kell alkalmazni.

24 VÉGESELEM-MÓDSZER ALAPJAI
A Κ rangját megkapjuk ha képezzük az összes ismeretlen és a merevtestszerű mozgás szabadságfokának a különbségét. A csomóponti paraméterek megkötése révén elvégezve a kinematikai előírásokat, megszűnik a merevtestszerű mozgás lehetősége. A megoldandó egyenletrendszert ekkor is
=Kq f (4.5)
alakban szokás írni. Az együttható mátrix és terhelési vektor azonban már tartal-mazza a kinematikai előírásokat is.
Az egyenletrendszer jellemzői közül a nagy méretek miatt fontos az együttható mátrix zérustól különböző elemeinek elhelyezkedése. Az egyenletrendszer szalag-szerkezetű amelyet az alábbi ábra szemléltet:
4.1. ábra K szerkezete
Ez azt jelenti, hogy a zérustól különböző blokkok egy adott sávba esnek, ame-lyet az elemen lévő sorszámkülönbség maximális értéke határoz meg. Nagysága alapvetően a sorszámozástól függ.
Példaként tekintsük a következõ végeselem felosztást és konstruáljuk meg a hozzá tartozó sematikus merevségi mátrixot
4.2. ábra
Téglalap felosztása 3 elemre
VÉGESELEM-MÓDSZER ALAPJAI 25
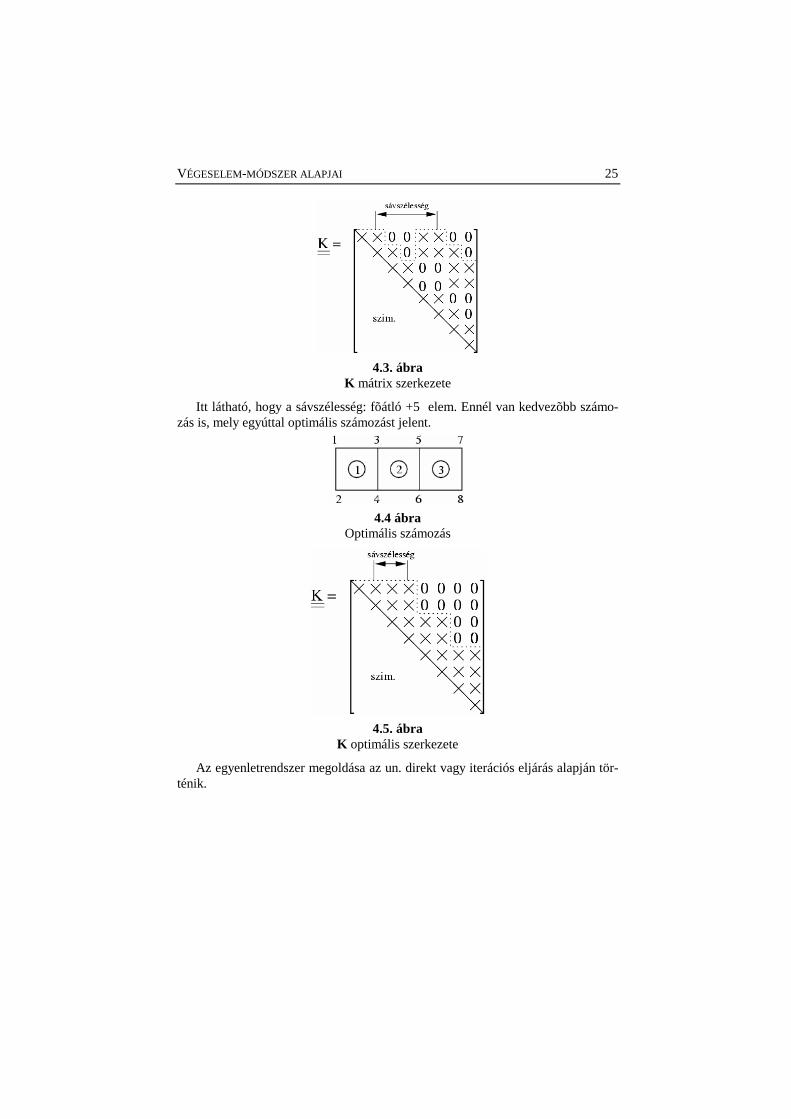
4.3. ábra
K mátrix szerkezete
Itt látható, hogy a sávszélesség: fõátló +5 elem. Ennél van kedvezõbb számo-zás is, mely egyúttal optimális számozást jelent.
4.4 ábra
Optimális számozás
4.5. ábra
K optimális szerkezete
Az egyenletrendszer megoldása az un. direkt vagy iterációs eljárás alapján tör-ténik.

26 VÉGESELEM-MÓDSZER ALAPJAI
5. EGYVÁLTOZÓS FELADATOK, SÍKBELI RÚDSZERKEZETEK
Rúdnak nevezzük azokat a testeket, amelyeknél a test egy kitüntetett térgörbére merőleges geometriai méretei lényegesen kisebbek a térgörbe irányában mérthez képest. Ha a térgörbe egyenes akkor egyenes rudakról beszélünk. A test „merőle-ges méretei” a rúd keresztmetszetét jelölik ki. Feltételezésünk szerint a keresztmet-szet súlypontja a térgörbén helyezkedik el, amit tömören középvonalnak nevezünk.
Elöljáróban síkbeli egyenes középvonalú és állandó keresztmetszetű (prizmatikus ) húzott-nyomott, hajlított-nyírt rudakat fogunk vizsgálni. A nyírási energia elhanyagolásával az. un. Bernoulli hipotézisű rudakhoz jutunk [1].
A rúdszerkezetek modelljeivel számos gyakorlati probléma szilárdságtani elemzése kényelmesen és nagy megbízhatósággal megoldható. A gépészetben az erőátviteli hajtóművek tengelyeinek méretezése, a gépállványok első durva mérete-inek meghatározása, csarnokszerkezetek tervezése stb. feladatorientáltan elkészí-tett végeselemes programok révén a mindennapos tervezői analízis eszköze. A bemutatott elmélet az elmélyültebb munkát, a mechanikai szemléletmód erősítését szolgálja. Equation Chapter 5 Section 1
5.1. BERNOULLI – FÉLE HIPOTÉZIS, VARIÁCIÓS EGYENLETEK
A vizsgált x–z síkban fekvő rúdszerkezet egy tetszőleges e jelű elemét a végein elhelyezkedő i és j csomópontokkal jellemezzük. A rúdhoz kötött helyi koordináta-rendszert az i, j csomópontokon átmenő ξ tengely és a rúdkeresztmetszetben elhe-lyezkedő η, ζ főtengelyek alkotják. A rúd tengelye az x tengellyel β szöget zár
be, hossza eL . A rúd elmozdulásánál feltételezzük, hogy a rúd keresztmetszete merőleges ma-
rad a meggörbült középvonalra, azaz érvényes a Bernoulli-féle hipotézis. Ekkor, szilárdságtani ismereteink alapján mondhatjuk, hogy a rúdban alakvál-
tozási energiát csak rúdirányú feszültségek adnak. A keresztmetszet mentén húzás-nyomásból állandó, hajlításból lineárisan megoszló lefutású feszültség keletkezik.

28 VÉGESELEM-MÓDSZER ALAPJAI
Ehhez tartozóan a rúdirányú elmozdulás a keresztmetszet egy tetszőleges P pont-jában (lásd az 5.1.ábrát) a következőképp írható fel:
( ) ( ) ( ), ,P Pu u u wξ η ζ ξ ξ ζ′= = − , (5.1)
ahol ( ) ( )d
dξ′ = , ( ) ( ),u wξ ξ a ξ ill. ζ irányú elmozdulás.
Az (5.1) összefüggés felhasználásával a tengelyirányú fajlagos nyúlás
( )ε ξ = ( ) ( )u wξ ξ ζ′ ′′− , (5.2)
míg az egyszerű Hooke-féle anyagegyenlet alapján a normál feszültség
( ) ( ) ,Eσ ξ ε ξ= (5.3)
ahol E a Young modulus.
5.1. ábra Síkbeli rúd elmozdulása, terhelése
Jelölje a rúdon ható megoszló terhelést, hosszirányban pξ , keresztirányban
pζ , melyeknek mértékegysége [N/mm].
A rúd végein 0 , LF Fξ ξ− rúderő, 0 , LF Fζ ζ− nyíróerő és 0 , LM Mη η−
hajlítónyomaték hat. A fenti terheléseket figyelembevéve, továbbá tekintettel, hogy az alakváltozási
energia csak a ( )σ ξ feszültségből származik, a rúd teljes potenciális energiája
két integrálon keresztül és a rúdvégeken ható koncentrált erők és nyomatékok ter-helési munkájából áll össze.

VÉGESELEM-MÓDSZER ALAPJAI 29
( )
( )( ( ) ( ) ( ) )( ( ) ( ) )
0 0
0
1
2
0 0
0
p
L A L
L L
L
E dA d u p w p d
u L F u F w L F w F
w L M w M
ξ ξ ξ ζ
ξ ξ ζ ζ
η η
ε ε ξ ξΠ = − +
− − + −
′ ′− − +
∫ ∫ ∫ (5.4)
A minimum feltételt kijelölő 0pδ Π = stacionaritási feltételből a uδ és wδ
mezők függetlensége miatt - az u rúdirányú elmozdulás vonatkozásában részlete-
zett módon -, az alábbi mezőegyenletek és peremfeltételek vezethetők le:
( )( ( ) )
( )( ( ) )
( ) ( )
0
0
0
0 ( )
0
0
u p
L A L
L
L L
L
L
i
L
u E u w dA d u p d
u L F u F u AE u d u p d
u L F u F
AEu F u u AEu p d
ξ
ξ ξ ξ
ξ ξ
ξ ξ
δ δ ζ ξ δ ξ
δ δ δ ξ δ ξ
δ δ
δ δ ξ
′ ′ ′′Π = = − −
′ ′− − = −
− −
′ ′ ′= − − + ⇒
∫ ∫ ∫
∫ ∫
∫
(5.5)
0,A E u pξ′′ + = (5.6)
( ) 00,
LiN F u N AEuξ δ ′− = = (5.7)
A részletek mellőzésével a keresztirányú w elmozdulás vonatkozásában, az egyensúlyt kifejező alapegyenlet
0,IVI E w pη ζ− = (5.8)
és a dinamikai peremfeltételt adó variációs egyenletek
( ) ( )0 00, 0
L Li iF F w M M wζ ζ η ηδ δ ′− = − = , (5.9)
azaz
F I E wζ η ′′′= − , és M I E wη η ′′= − (5.10)
Látható, hogy megoszló terhelés hiányában az (5.6) és (5.8) mezőegyenletek lineáris u , ill. harmadfokú w polinommal elégíthetők ki.
Amennyiben a rúd hossza mentén megoszló terhelések lineárisan változnak, akkor a mezőegyenletek partikuláris megoldását harmadfokú ill. ötödfokú polinom szolgáltatja. Ebben az esetben a végeselem közelítő mezői egyúttal pontos megol-dások, vagyis jelen esetben a teljes potenciális energia minimuma elv exakt meg-oldást szolgáltat a rúdszerkezet vonatkozásában. Nagy előnye a módszernek, hogy kis elmozdulások és alakváltozások feltételezése mellett, a statikailag többszörösen

30 VÉGESELEM-MÓDSZER ALAPJAI
határozatlan szerkezetek minden nehézség nélkül vizsgálhatók. Figyelmet a kine-matikai perem- és illesztési feltételek kielégítésére kell csak összpontosítani.
A fenti (5.6)-(5.10) alatti variációs egyenletekből, peremfeltételekből követke-
zik, hogy az elemek közötti mezők folytonossági feltételek u mezőnél 0C osztá-
lyú – azaz a függvény folytonos –, a w mezőnél 1C osztályú folytonosságot – azaz a derivált folytonosságát is megköveteljük. A síkban elhelyezkedő különböző irányítottságú elemek miatt a ξ ζ− helyi koordinátarendszerben értelmezett,
csomópontonként megjelenő , ,u w wηϕ ′= − elmozdulási paraméterek transzfor-
mációjára lesz majd szükség.
5.2. ELMOZDULÁSMEZŐ KÖZELÍTÉSE
A fenti levezetésből következik, hogy az elemen belüli elmozdulásmező ,u w .
Ezeket polinomok segítségével közelítjük. A polinomok tagjainak egy részénél az együtthatókat csomópontonként felvett két elmozdulási és egy szögelfordulási ér-tékkel tudjuk kifejezni, ill. az inhomogén differenciálegyenletek partikuláris meg-oldásaihoz tartozó tagokat pótlólagos állandóként, paraméterként fogjuk a továb-biakban szerepeltetni. Definiálva az elem helyi koordinátarendszerben értelmezett
eq általánosított csomóponti vektorát, az ea pótlólagos állandók vektorát, a felso-
rolt műveletek végrehajtása után az alábbi approximációhoz jutunk. Vagyis az elemen belüli elmozdulásvektor
( ) ( ) ( )e
e e e e eu
wξ ξ ξ
= = +
u N q N a , (5.11)
ahol a csomóponti elmozdulásvektorhoz tartozó approximációs mátrix
( ) ( ) ( ) eei jξ ξ ξ = N N N , (5.12)
ahol ( ) ( )2 3 2 3
1 0 0
0 1 3 2 2
e
ei
L
ξξ
ξ ξ ξ ξ ξ
− = − + − − +
N ,
( ) ( )2 3 2 3
0 0
0 3 2
e
ej
L
ξξ
ξ ξ ξ ξ
= − −
N , / eLξ ξ= .
A pótlólagos állandókkal megszorzott approximációs mátrix
( )( ) ( )
( ) ( )2 2 3 3
4 4 3 2 5 5 3 2
0 0
0 0 2 3 2
e
eL L
L L
ξ ξ ξ ξξ
ξ ξ ξ ξ ξ ξ
− − = − + − +
N (5.13)

VÉGESELEM-MÓDSZER ALAPJAI 31
, ee T T Ti j
= q q q , , ee T T Tu w
= a a a , [ ], , ,ee T
i iu w w′= −q .
5.3. MEREVSÉGI MÁTRIX, REDUKÁLT TERHELÉSI VEKTOROK
Az (5.4) diszkretizálása után véges dimenziójú feladatot kapunk, azaz a diszkretizált teljes potenciális energia
( ) ( ( )
( )), ,1
, 22
ee e eq pqq qae e e T e T
p p e e eeaq aa a p
Π = Π = −
fK K qq a q a
K K fa (5.14)
ahol ( ) ( ),
e
e e Tq p
L
pdp
ξ
ζξ ξ
= ∫f N , ( ) ( ),
e
e e Ta p
L
pdp
ξ
ζξ ξ
= ∫f N (5.15)
( ) ( ),0
0e
ee eT eqq
L
AEd
I Eηξ ξ ξ
=
∫K B B ,
( ) ( ),0
0e
ee eT eaa
L
AEd
I Eηξ ξ ξ
=
∫K B B .
Itt
( )2 2
1 10 0 0 0
12 6 4 6 6 12 2 60 0
e
e L L
L LL L
ξξ ξ ξ ξ
− = − − − −
B (5.16)
( )( )
2 2
2 2 3 2 3
2 3 0 0
0 0 12 2 20 18 4
e
eL L
L L L L
ξ ξξ
ξ ξ ξ ξ
− − = − + − +
B . (5.17)
A potenciális energiában szereplő, a helyi koordinátarendszerben értelmezett
vegyes indexű merevségi mátrix, jelen esetben ,= =e e Taq qaK K 0 .
Az ea paraméterekhez tartozó eaaK merevségi mátrix és annak inverze zárt
alakban felírható és így a ( )/∂Π ∂ = − =e e e ep aa a pa K a f 0 minimum feltételből az
ea kiszámolható. A számítások elvégzése után a pótlólagos állandók vektora a két mező vonatkozásában

32 VÉGESELEM-MÓDSZER ALAPJAI
( ), 1
2 6
eie T
u i j
pp p
AE AELξ
ξ ξ
= − −
a , (5.18)
( ), 1
12024
e
ie Tw j i
pp p
I ELI E
ζζ ζ
ηη
= −
a . (5.19)
A szimmetrikus eqqK merevségi mátrix az alábbi
3 2 3 2
2 2
3 2 3 2
2 2
/ 0 0 / 0 0
0 12 / 6 / 0 12 / 6 /
0 6 / 4 / 0 6 / 2 /
/ 0 0 / 0 0
0 12 / 6 / 0 12 / 6 /
0 6 / 2 / 0 6 / 4 /
e
eqq
AE L AE L
I E L I E L I E L I E L
I E L I E L I E L I E L
AE L AE L
I E L I E L I E L I E L
I E L I E L I E L I E L
η η η η
η η η η
η η η η
η η η η
−
− − −
− = − − −
K
A redukált csomóponti terhelési vektor az (5.15) alatti integrál kiszámítása után a következő összefüggések révén számolható, (az áttekinthetőség érdekében a mát-rix elemeket vesszővel választjuk el):
[ [ ( ) ] [ ( ) ]
[ ( ) ] [ ( ) ]
[ ( ) ] [ ( ) ] ]
,( )
2
2
1 3, ,
2 6 2 20
1 1, ,
12 30 2 3
7 1,
2 20 12 20
i ie Tq p j i j i
i ij i j i
ei ij i j i
p pL p p L p p
p pL p p L p p
p pL p p L p p
ξ ζξ ξ ζ ζ
ζ ξζ ζ ξ ξ
ζ ζζ ζ ζ ζ
= + − + −
− + − + −
+ − + −
f
A helyi koordinátarendszerben felírt diszkretizált potenciális energiát az ele-mek közötti elmozdulásmező folytonosságának biztosítása érdekében az x z− globális koordinátarendszerben értelmezett U, W elmozdulásokkal és a síkra merő-leges yϕ szögelforduláson keresztül lehet kifejezni.
A helyi, rúdhoz kötött koordinátarendszerben lévő csomóponti általánosított elmozdulást a globálbeli értékeken keresztül az alábbi összefüggés révén fejezhet-jük ki:
0
cos sin 0
sin cos 0
0 0 1
e e e
e e ei i
Y ii
u U
w W
wη
β ββ β
ϕ ϕ
= = − ≡ ′= −
q T q , (5.20)
vagyis az elem csomóponti általánosított elmozdulásvektora

VÉGESELEM-MÓDSZER ALAPJAI 33
0
0
e eei ie e e
j j
= = ≡
q qT 0q T q
q q0 T, (5.21)
ahol eT az elem transzformációs mátrixa. Ezek után az elem teljes potenciális energiája
( ) ( ) ( ( ) )
( )
, , ,
, ,
1, , 2 ...
21
...,2
e e e e e T e T e e e e T ep p p qq q p
e T e e e T eqq q p
Π = Π = Π = − +
= − +
q a q a q T K T q T f
q K q q f(5.22)
ahol ,e e T e eqq qq=K T K T - a globális rendszerbeli merevségi mátrix,
( ) ( ),e e T e
q p q p=f T f - a globális rendszerbeli redukált csomóponti általánosított terhe-
lési vektor. Ezek ismeretében az elemek csatolása az ismert szabályok alapján már könnyen elvégezhető.
5.4. A HŐHATÁS FIGYELEMBEVÉTELE
A rúdban a hőmérséklet-megoszlást a ( ),θ θ ξ ζ= függvényen keresztül adjuk
meg, α -a fajlagos hőtágulási együttható. Feltételezzük, hogy a rúdban a hőmér-sékletmező az alábbi összefüggés alapján lineárisan változik
( ) ( ) ( ( ) ), / /i j i i j iL Lθ θ ξ ζ θ θ θ ξ ζ θ θ θ ξ= = + − + ∆ + ∆ − ∆ (5.23)
ahol iθ az i-edik keresztmetszet súlypontjának hőmérsékletét, iθ∆ pedig a hőmér-
séklet i-edik keresztmetszetbeli ζ menti lineáris változását jellemzi.
Hőhatás esetén a keletkező normálfeszültség
( ) ( ) ( ) ,= −Eσ ξ ε ξ αθ ξ ζ . (5.24)
A képlet szerint látható, ha pl. egy rúd meg van akadályozva a megnyúlásában (két vége merev lapokra támaszkodik), akkor egyenletesen melegítve a rúdat
( ), állθ ξ ζ θ= , alakváltozás nem lép fel, de a keresztmetszet menti állandó nyomó
feszültség jön létre ( ) állEσ ξ αθ= − . Ha a rúd egyik végét mozgásában nem aka-
dályozzuk, akkor a hőmérséklet emelkedésből származó fajlagos nyúlás
( ) /áll L Lε ξ αθ= azonos lesz az állαθ értékkel, vagyis a rúdban nem lép fel
hőfeszültség. Általánosan mondható, ha a test homogén, izotróp, és a testben a hőmérséklet lineárisan változik, továbbá a test szabadon tud terjeszkedni, akkor a testben a hőhatásból nem származnak feszültségek, annak ellenére, hogy a testben elmozdulások felléptek.
A hőhatásból adódóan a teljes potenciális energia módosul. Szimmetrikusan felírva

34 VÉGESELEM-MÓDSZER ALAPJAI
( ) ( ) ( )1...
2p
L A L
E dA d u p w p dξ ξ ξ ζε αθ ε αθ ξ ξΠ = − − − + −∫ ∫ ∫ , (5.25)
majd a diszkretizálást elvégezve a redukált hőterhelési vektor:
( ) [ ( ) ( )
( ) ( ) ]
, , , ,2
, ,2
e Ti j i j iq
ei j j i j
I EA EI E
LI EA E
I EL
ηηθ
ηη
αα θ θ θ θ α θ
αα θ θ θ θ α θ
= − + ∆ − ∆ − ∆
+ ∆ − ∆ ∆
f
(5.26)
ill. a hőmérséklethez tartozó pótlólagos állandók vektora
( ), , 0, 0, 0
2
e
j ie T
Lθθ θ
α − =
a . (5.27)
5.5. RUGALMAS ÁGYAZÁS FIGYELEMBEVÉTELE
Érintkezésben álló testek egyikét gyakran un. Winkler típusú közeggel szoká-sos helyettesíteni. A vasúti sín, az utak betonburkolata, szerszámgépek szánrend-szerének vezetékei stb. ezzel a modellel jól megközelíthetők. A szóban forgó mo-dellnél a testet egymástól függetlenül álló rugókkal helyettesítjük. A rugókban keletkező erő arányos az elmozdulással. Esetünkben a megoszló terhelés intenzitá-
sa wp c wζ= , ahol cζ un. rugóállandó, ágyazási tényező. Az egységnyi hosszra
eső fajlagos alakváltozási energia 20.5 0.5ww p c wζ= . Ily módon a tartó menti
rugalmas ágyazásból származó energia
1
2erug
L
U w c w dζ ξ= ∫ . (5.28)
A ζ tengely irányú w elmozdulás (5.11) alatti közelítésével, a behelyettesítés
és integrálás után, eL L= figyelembevételével
( ) , ,1,
2
e e eqq qa we e e e e T e T
rug rug w w e e eaq aa wrug
U U
= =
K K qq a q a
K K a, (5.29)
ahol , , ,, ,
e T e T e Tw w i w j
= q q q , [ ],, ,
ee Tw i i
w w′= −q , [ ],1 2,
ee Tw w
a a=a ,

VÉGESELEM-MÓDSZER ALAPJAI 35
2 2
,
2
156 22 54 13
4 13 3
. 156 22420
4
eqq rug
L L
c L L L L
szimm L
L
ζ
−
− =
K , (5.30)
5, 2 2
1/ 60 / 280 1/ 60 / 280,101 11 109 23
2520 1260 2520 2520
eaq rug
L Lc L L
L L Lζ
− = −
K (5.31)
9, 2
1/ 630 / 252
23/ 252
2310
eaa rug
Lc L
L Lζ
=
K . (5.32)
A felírásból következik, hogy ebben az esetben mivel eaqK kapcsoló mátrix
nem zérus, a pótlólagos állandók hatásának eliminálása a 13.1 részben ismertetésre kerülő alszerkezettechnikánál ismertetett eljárás révén oldható meg. Ennek értel-mében a redukált merevségi mátrix
( ( ) )1
, ,e e e e eqq rug red qq qa aa aq rug
−= −K K K K K .
A rugalmas ágyazású tartóhoz rendelhető teljes potenciális energia
( )2 21 1....
2 2p
L L L
I E w d c w d w p dη ζ ζξ ξ ξ′′Π = + − −∫ ∫ ∫ . (5.33)
Képezve a pΠ első variációját, a rugalmas ágyazású prizmatikus tartók differen-
ciálegyenletére a következőt kapjuk:
IVI Ew c w pη ζ ζ+ = . (5.34)
Ennek megoldása a
44c
I Eζ
ηα = (5.35)
tag bevezetésével
( ) ( ) ( )4
41 0
4i i
i
w a V V p dc
ξ
ζζ
αξ ξ τ τ τ=
= + −∑ ∫ , (5.36)
ahol a ( )iV ξ Krülov függvények
( ) ( ) ( ) ( ) ( ) ( )1 21
cos , sin cos ,2
V ch V ch shαξ αξ αξ αξ αξ αξ= = +

36 VÉGESELEM-MÓDSZER ALAPJAI
( ) ( ) ( ) ( ) ( ) ( )3 41 1
sin , sin cos ,2 2
V sh V ch shαξ αξ αξ αξ αξ αξ= = −
alakban számolhatók. Ily módon a rugalmas ágyazású tartó w elmozdulásának polinomos közelítése már nem ad pontos megoldást. A végeselemes megoldás pontosítható egyrészt a pótlólagos állandók, másrészt a végeselemek számának emelésével. A fenti végeselemnél a felvett pótlólagos állandók száma kettő.
6. EGYVÁLTOZÓS FELADATOK, TÉRBELI RÚDSZERKEZETEK
Az előző fejezetben bemutatott elvek segítségével a térbeli rudak elmozdulásmezőn alapuló közelítése könnyen elvégezhető [1].
i
j
e
ξF
ξM
ξ
ηζ ηF
ζFηM
ζM
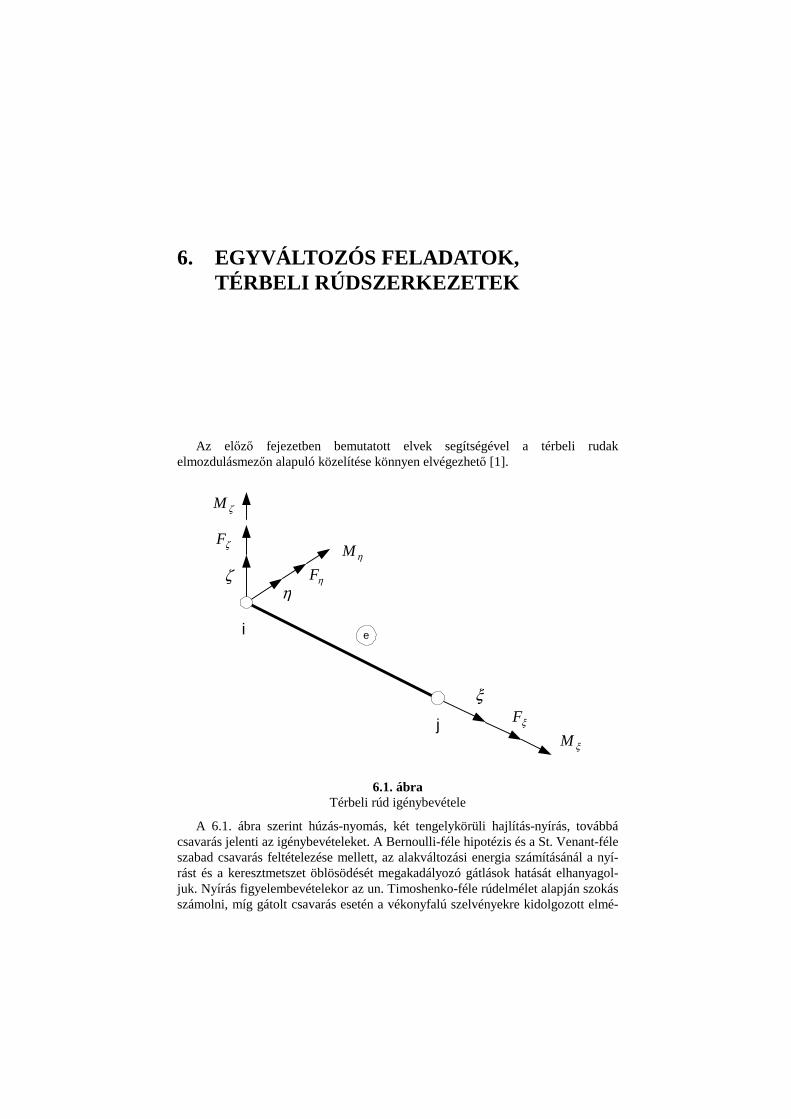
6.1. ábra Térbeli rúd igénybevétele
A 6.1. ábra szerint húzás-nyomás, két tengelykörüli hajlítás-nyírás, továbbá csavarás jelenti az igénybevételeket. A Bernoulli-féle hipotézis és a St. Venant-féle szabad csavarás feltételezése mellett, az alakváltozási energia számításánál a nyí-rást és a keresztmetszet öblösödését megakadályozó gátlások hatását elhanyagol-juk. Nyírás figyelembevételekor az un. Timoshenko-féle rúdelmélet alapján szokás számolni, míg gátolt csavarás esetén a vékonyfalú szelvényekre kidolgozott elmé-

38 VÉGESELEM-MÓDSZER ALAPJAI
letek jönnek számításba. Ezek végeselemes tárgyalása az [1] irodalomban részlete-sen megtalálható. Equation Chapter 6 Section 1
wv
u
i
j
e
z
x y
ζp
ηp
ξpξϕ
ηϕ
ζϕ
ξ
ηζ
6.2. ábra Térbeli rúd terhelése, elmozdulása
A fent említett elmozdulásra vonatkozó hipotézisek alapján a test tetszőleges P pontjának elmozdulása
( ) ( ) ( ) ( ) ( ) ( ), , ,P Pu u u v w ξξ η ζ ξ ξ η ξ ζ ϕ ξ η ζ′ ′ ′= = − − + Φ , (6.1)
( ) ( ) ( ), ,P Pv v v ξξ η ζ ξ ϕ ξ ζ= = − , (6.2)
( ) ( ) ( ), ,P Pw w w ξξ η ζ ξ ϕ ξ η= = + , (6.3)
ahol ( ),η ζΦ = Φ deplanációs függvény, amelynek értéke végeselem-módszer
révén is meghatározható [Páczelt I. – Szabó T.: Estimation of torsional rigidity by means of the finite element method, Acta Technica Acad. Sci. Hung., 104(1-3), 1991/92, p. 211-236.] A keletkező alakváltozások, az (1.2) alapján
( ) ( ) ( ) ( ) ( ) ( ), , ,u v wξ ξ ξε ε ξ η ζ ξ ξ η ξ ζ ϕ ξ η ζ′ ′′ ′′ ′′= = − − + Φ , (6.4)
( ) ( ), ,ηξ ηξ ξγ γ ξ η ζ ζ ϕ ξη
∂Φ ′= = − ∂ , (6.5)
( ) ( ), ,ζξ ζξ ξγ γ ξ η ζ η ϕ ξζ
∂Φ ′= = + ∂ . (6.6)

VÉGESELEM-MÓDSZER ALAPJAI 39
A csavarásnál értelmezést nyer a keresztmetszet cI csavarási keresztmetszet
jellemző, amely az
2 2
c
A
I dAη ζζ η
∂Φ ∂Φ= + + − ∂ ∂ ∫ (6.7)
integrál segítségével számolható ki.
A csavarást jellemző ( )ξϕ ξ keresztmetszet merevtestszerű szögelfordulás me-
zőjét, hasonlóan a rúdirányú elmozduláshoz 0C osztályú függvénnyel kell közelí-teni. Az η ξ− síkbeli hajlításnál a v elmozdulásnak és annak ξ szerinti derivált-
jának is folytonosnak kell lennie. Ily módon az elem belüli elmozdulásmező
( ) ( ) ( )
e
e e e e e
u
v
w
ξϕξ ξ ξ
= = +
u N q N a , (6.8)
ahol a csomóponti elmozdulásvektor
, ee T T Ti j
= q q q , , , , ,e
iu v w w vξϕ ′ ′= − , (6.9)
továbbá a lineárisan megoszló terhelés hatását pontosan figyelembevevő pótlóla-gos állandók vektora
, ee T T T Tu v w
= a a a a . (6.10)
A síkbeli esetben bemutatott approximációs mátrix eredményeit felhasználva a térbeli esetre a közelítés függvényei könnyen felírhatók.
A potenciális energia prizmatikus rudat feltételezve
( )
( )( ( ) ( ) ( ) ( ) ( ) )( ( ) ( ) ( ) ( ) ( ) ( ) )
2
0 0 0
0 0 0
1 1
2 2
0 0 0
0 0 0
p c
L A L L
L L L
L L L
E dA d I G d u p vp w p d
u L F u F v L F v F w L F w F
L M M v L M v M w L M w M
ξ ξ ξ ξ η ζ
ξ ξ η η ζ ζ
ξ ξ ξ ξ ζ ζ η η
ε ε ξ ϕ ξ ξ
ϕ ϕ
Π = + − + +
− − + − + −
′ ′ ′ ′− − + − − +
∫ ∫ ∫ ∫
Diszkretizálás után ismét azt kapjuk, hogy eaq =K 0 , továbbá a pótlólagos állandók
zárt alakban kiszámolhatók. A (12,12) méretű eqqK mátrix és csomóponti terhelési
vektor az alábbiak szerint számítható ki:
40 VÉGESELEM-MÓDSZER ALAPJAI
( ) ( ), ,
eeeii ije T
qq ji ijqq qqji jj qq
= =
K KK K K
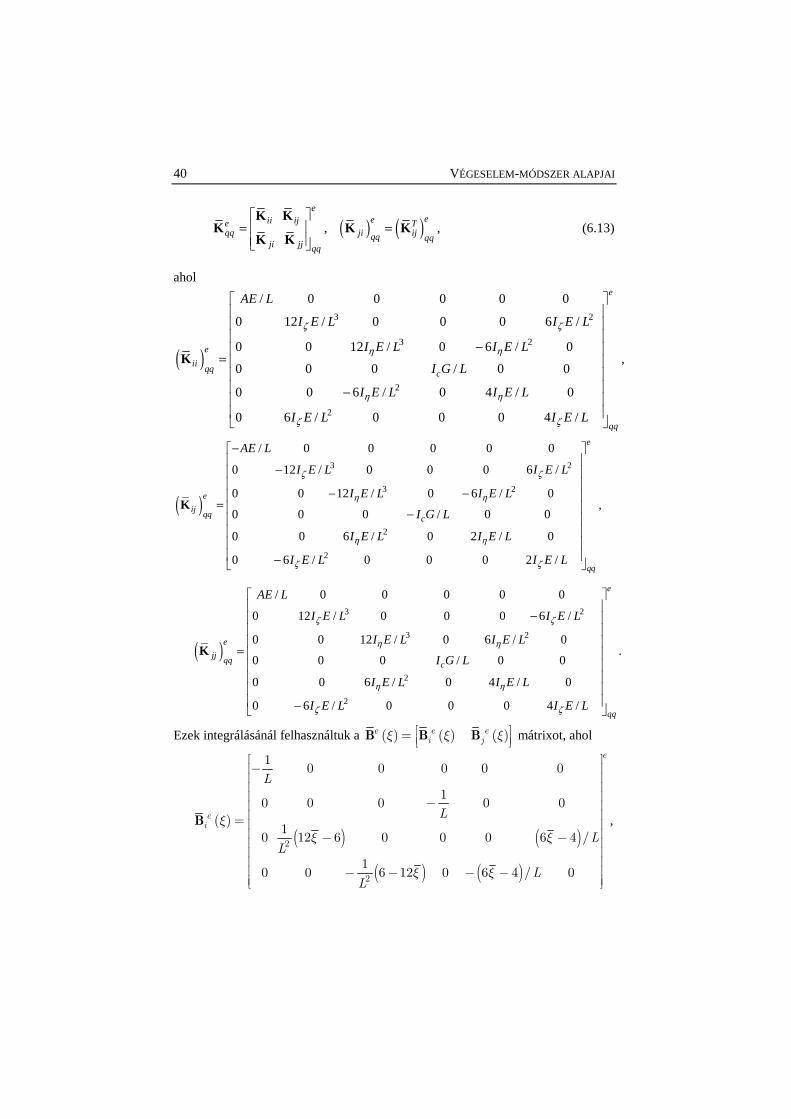
K K (6.13)
ahol
( )
3 2
3 2
2
2
/ 0 0 0 0 0
0 12 / 0 0 0 6 /
0 0 12 / 0 6 / 0,
0 0 0 / 0 0
0 0 6 / 0 4 / 0
0 6 / 0 0 0 4 /
e
e
iiqq c
AE L
I E L I E L
I E L I E L
I G L
I E L I E L
I E L I E L
ζ ζ
η η
η η
ζ ζ
− = −
K
( )
3 2
3 2
2
2
/ 0 0 0 0 0
0 12 / 0 0 0 6 /
0 0 12 / 0 6 / 0,
0 0 0 / 0 0
0 0 6 / 0 2 / 0
0 6 / 0 0 0 2 /
e
e
ijqq c
AE L
I E L I E L
I E L I E L
I G L
I E L I E L
I E L I E L
ζ ζ
η η
η η
ζ ζ
−
−
− − = − −
K
( )
3 2
3 2
2
2
/ 0 0 0 0 0
0 12 / 0 0 0 6 /
0 0 12 / 0 6 / 0.
0 0 0 / 0 0
0 0 6 / 0 4 / 0
0 6 / 0 0 0 4 /
e
e
jjqq c
AE L
I E L I E L
I E L I E L
I G L
I E L I E L
I E L I E L
ζ ζ
η η
η η
ζ ζ
−
= −
K
Ezek integrálásánál felhasználtuk a ( ) ( ) ( )e e ei jξ ξ ξ = B B B mátrixot, ahol
( )( ) ( )
( ) ( )2
2
1 0 0 0 0 0
10 0 0 0 0
10 12 6 0 0 0 6 4 /
10 0 6 12 0 6 4 / 0
e
ei
L
L
LL
LL
ξξ ξ
ξ ξ
− − = − − − − − −
B ,

VÉGESELEM-MÓDSZER ALAPJAI 41
( )( ) ( )
( ) ( )2
2
1 0 0 0 0 0
10 0 0 0 0
10 6 12 0 0 0 6 2 /
10 0 6 12 0 6 2 / 0
e
ej
L
L
LL
LL
ξξ ξ
ξ ξ
− − = − − − − −
B .
A redukált csomóponti terhelési vektor:
( )
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
[ ( ) ]
2
2
2
2
1
2 6
3
2 20
3
2 200
1
12 30
1
12 30
1
2 3
7
2 20
7
2 200
1
12 20
1
12 20
ij i
ij i
ij i
ij i
ij i
eq p
ij i
ij i
ij i
ij i
ij i
pL p p
pL p p
pL p p
pL p p
pL p p
pL p p
pL p p
pL p p
pL p p
pL p p
ξξ ξ
ηη η
ζζ ζ
ζζ ζ
ηη η
ξξ ξ
ηη η
ζζ ζ
ζζ ζ
ηη η
+ −
+ −
+ −− + − + −
= + − + − + −
+ −
− + −
f
e
. (6.14)
Az eua és e
wa pótlólagos állandók vektora azonos a síkbeli esetnél kapottal,
az η irányú v elmozduláshoz tartozóan
( ), 1
12024
e
ie Tv j i
pp p
I ELI E
ηη η
ζζ
= −
a . (6.15)
Hőhatás esetén hasonló eredmények írhatók fel.

42 VÉGESELEM-MÓDSZER ALAPJAI
A lokális rendszerbeli mennyiségek az alábbi ortogonális transzformáció segít-
ségével nyernek átszámítást. Jelölje a rúdhoz kötött koordinátarendszer tengelyeinek irányába mutató egy-
ségvektorokat , ,ξ η ζe e e . A globális rendszerbeli Descartesi tengelyek irányába
mutató egységvektorok legyenek , ,x y ze e e . Ekkor áll
,,0
e ex x x
e T ey y y elm i
z z zi i
U u
V v
W w
ξ η ζ
ξ η ζ
ξ η ζ
⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅
e e e e e e
e e e e e e T q
e e e e e e
. (6.16)
Hasonló összefüggés igaz a szögelfordulási paraméterekre is. Tehát az i-edik csomópont vonatkozásában fennáll, hogy
0 ,0
0
0
0
ee
eTe T e
iTx
y
z i i
uUvVwW
ξ
η
ζ
ϕϕϕ ϕ
ϕϕ
= =
TT q
T. (6.17)
Az egész elem vonatkozásában a transzformáció
0 ,
0
0
0
ee eTi ie e T e
Tj j i
= = =
q qTq T q
q qT, (6.18)
azaz
0
0
0
0
ee ei ie e e
j j i
= = =
q qTq T q
q qT. (6.19)
Vagyis a globális rendszerbeli merevségi mátrix
,e e T e eqq qq=K T K T , (6.20)
míg a redukált csomóponti terhelési vektor
( ) ( ),e e T e
q p q p=f T f (6.21)
egyszerű szorzással a lokális rendszerbeli értékekből kiszámolható.
7. KÉTVÁLTOZÓS RUGALMASSÁGTANI FELADATOK VIZSGÁLATA IZOPARAMETRIKUS ELEMEKKEL
A valóságos mérnöki, szilárdságtani feladatok mindig a térbeli, háromdimenzi-ós Euklideszi térhez köthetők. Mégis, számos esetben a vizsgált test geometriai alakja, az anyagjellemzők és a testre működő külső erőrendszer tulajdonságai lehe-tővé teszik, hogy matematikailag a problémát kétváltozósként lehessen kezelni. A szilárdságtan tipikus kétváltozós feladattípusait a következő fejezet tárgyalja és az ott bemutatott formalizmusból látható majd, hogy a különböző feladattípusokhoz alapvetően azonos elemtípusokat lehet alkalmazni.
A gyakorlati feladatok megoldásában különösen jól használhatók a lineáris és kvadratikus, három illetve négyszög geometriájú izoparametrikus elemek. Ez utóbbi, általános definició szerint azt jelenti, hogy az elem geometriai pontjait és az elem menti elmozdulás mezőt ugyanolyan, természetes koordináta-rendszerben adott interpolációs függvényekkel közelítjük [1],[2].
7.1. NÉGYCSOMÓPONTÚ ELEM
A 7.1.a.ábra egy konvex egyenesoldalú, négycsomópontú elemet mutat az xy globális koordináta-rendszerben, amelyet egy két egység élű négyzet-tartományra kívánunk leképezni. Ennek érdekében az ( ),x ξ η és ( ),y ξ η leképező függvé-
nyeket bilineáris alakban írjuk fel: Equation Chapter 7 Section 1
[ ] T1 2 3 4( , ) 1 ( , )x a a a aξ η ξ η ξη ξ η ξη ξ η= + + + = =a aϕ
1 2 3 4( , ) ( , )Ty b b b bξ η ξ η ξη ξ η= + + + = bϕ (7.1)
44 VÉGESELEM-MÓDSZER ALAPJAI
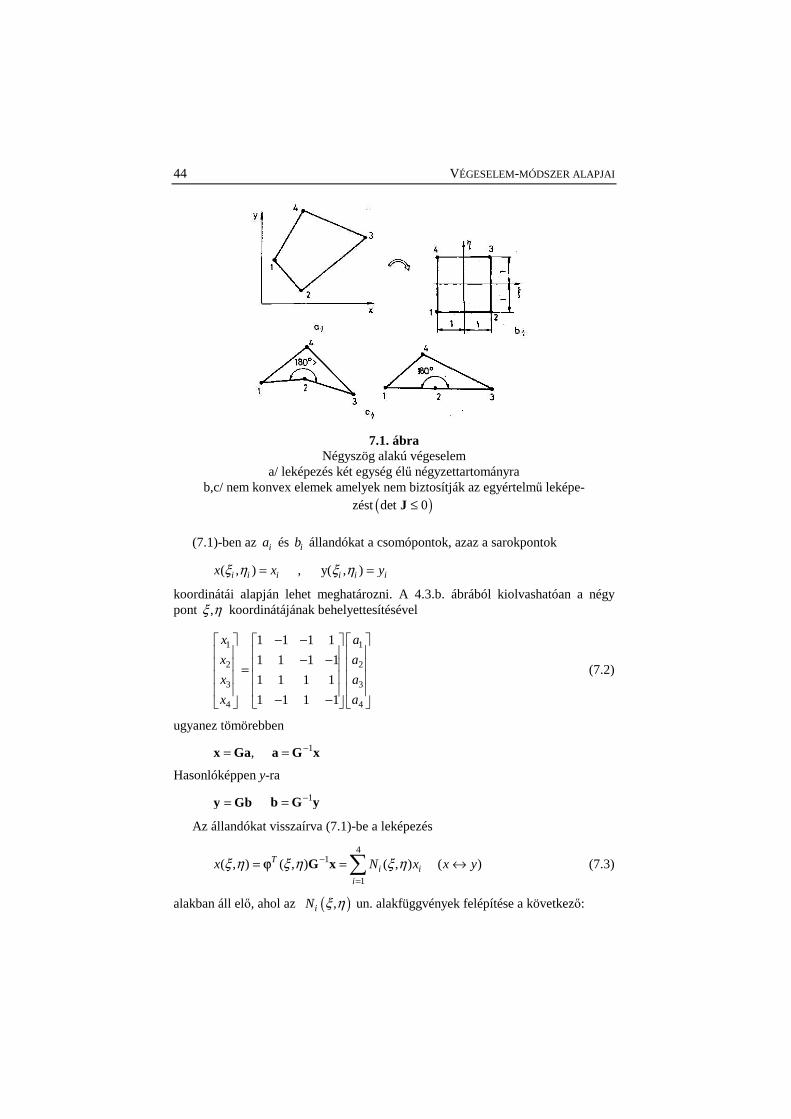
7.1. ábra
Négyszög alakú végeselem a/ leképezés két egység élű négyzettartományra
b,c/ nem konvex elemek amelyek nem biztosítják az egyértelmű leképe-zést ( )det 0≤J
(7.1)-ben az ia és ib állandókat a csomópontok, azaz a sarokpontok
( , ) , y( , )i i i i i ix x yξ η ξ η= =
koordinátái alapján lehet meghatározni. A 4.3.b. ábrából kiolvashatóan a négy pont ,ξ η koordinátájának behelyettesítésével
1 1
2 2
3 3
4 4
1 1 1 1
1 1 1 1
1 1 1 1
1 1 1 1
x a
x a
x a
x a
− − − − = − −
(7.2)
ugyanez tömörebben
,=x Ga 1−=a G x
Hasonlóképpen y-ra
=y Gb 1−=b G y
Az állandókat visszaírva (7.1)-be a leképezés
4
1
1
( , ) ( , ) ( , )Ti i
i
x N xξ η ξ η ξ η−
=
= =∑G xϕ ( )x y↔ (7.3)
alakban áll elő, ahol az ( ),iN ξ η un. alakfüggvények felépítése a következő:

VÉGESELEM-MÓDSZER ALAPJAI 45
1
2
1(1 )(1 )
41
(1 )(1 )4
N
N
ξ η
ξ η
= − −
= + −
3
4
1(1 )(1 )
41
(1 )(1 )4
N
N
ξ η
ξ η
= + +
= − + (7.4)
Könnyen ellenőrizhető, hogy a (7.4) függvények összege:
4
1
( , ) 1ii
N ξ η=
=∑ (7.5)
Mármost tekintettel az izoparametrikus elemek definíciójára a (7.4) függvé-nyek birtokában egyértelmű, hogy az elemek mentén az x irányú u és az y irányú v elmozduláskoordinátákat az
4 4
1 i 1
( , ) és ( , )i i i ii
u N u v N vξ η ξ η= =
= =∑ ∑ (7.6)
formulákkal közelítjük, ahol iu , iv konkréten az i-edik csomópontbeli x és y irá-
nyú elmozduláskoordinátákat jelenti. Végül e ponton belül néhány megjegyzés: A (7.4) formulákkal adott alakfüggvények elsőrendű folytonos deriváltakkal
rendelkeznek. Ahhoz azonban, hogy ez biztosítsa a (7.6) elmozdulásmező folyto-nosságát az elem mentén, nyílván egy-egyértelmű leképzés szükséges az x,y és a
,ξ η koordináta-rendszerek között, melyhez tejlesülni kell a
det det 0
x y
x y
ξ ξ
η η
∂ ∂ ∂ ∂ = >
∂ ∂ ∂ ∂
J ,
azaz a J –Jacobi mátrix determinánsnak pozitívnak kell lennie. Ez azonban csak akkor lehetséges, ha a négyszög konvex, vagyis valamennyi belső szög 180o –nál kisebb (ld. 7.1.ábrák). Egyszerűen bizonyítható az elem teljessége
4 4
0 1 21 1
0 1 2 0 1 2
( , ) ( )
)
i i i ii i
i i i i ii i i
u N u N c c c y
N c N y c N y c c c x c y
ξ η= =
= = + + =
= + + = + +
∑ ∑
∑ ∑ ∑( )u v↔
ami fizikailag azt jelenti, hogy a közös oldallal rendelkező szomszédos elemek határai mentén-és így a teljes végeselemekkel behálózott kétdimenziós tartomá-nyon az elmozdulásmező folytonos.
Az eddig ismertetett gondolatok valamennyi izoparametrikus elemtípusra érvé-nyesek, azaz az elemháló sűrítésével a konvergencia kritériumok (a közelítő mező-höz és az egzakt mezőhöz tartozó potenciális energiák különbségre a zérushoz tart) automatikusan teljesülnek. Ez is magyarázata az izoparametrikus elemek széleskö-rű alkalmazásának.
46 VÉGESELEM-MÓDSZER ALAPJAI
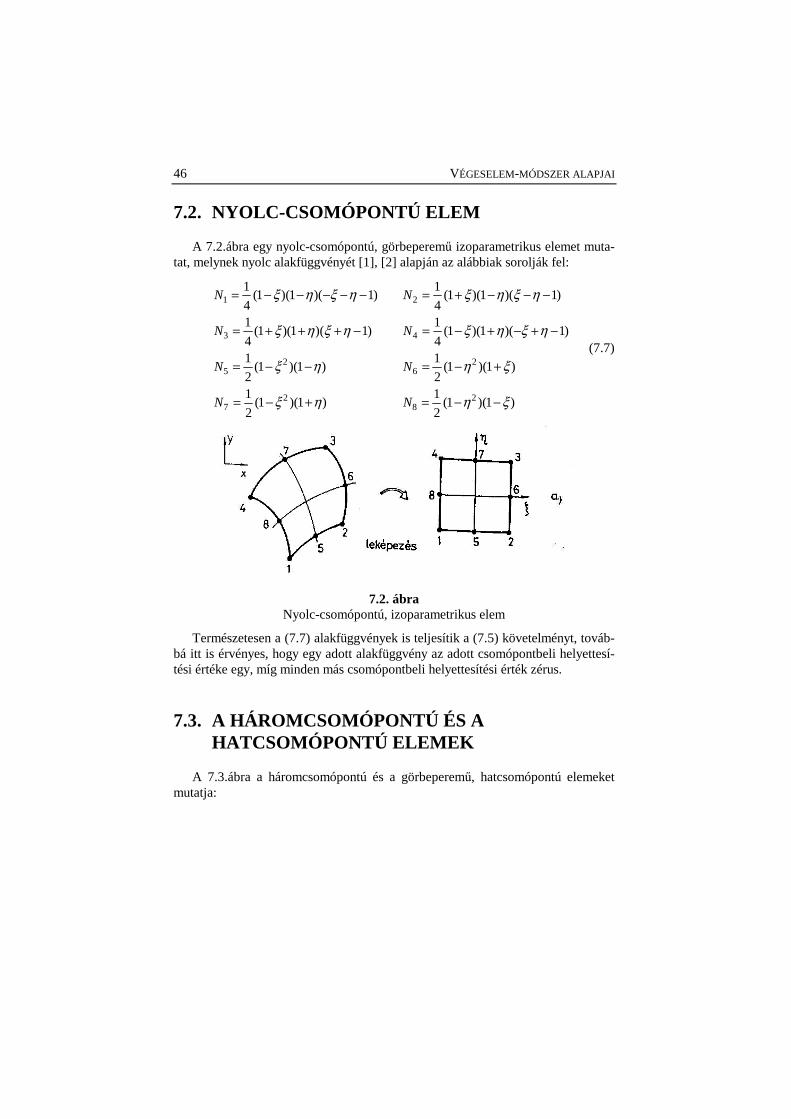
7.2. NYOLC-CSOMÓPONTÚ ELEM
A 7.2.ábra egy nyolc-csomópontú, görbeperemű izoparametrikus elemet muta-tat, melynek nyolc alakfüggvényét [1], [2] alapján az alábbiak sorolják fel:
1
3
25
27
1(1 )(1 )( 1)
41
(1 )(1 )( 1)41
(1 )(1 )21
(1 )(1 )2
N
N
N
N
ξ η ξ η
ξ η ξ η
ξ η
ξ η
= − − − − −
= + + + −
= − −
= − +
2
4
26
28
1(1 )(1 )( 1)
41
(1 )(1 )( 1)41
(1 )(1 )21
(1 )(1 )2
N
N
N
N
ξ η ξ η
ξ η ξ η
η ξ
η ξ
= + − − −
= − + − + −
= − +
= − −
(7.7)
7.2. ábra
Nyolc-csomópontú, izoparametrikus elem
Természetesen a (7.7) alakfüggvények is teljesítik a (7.5) követelményt, továb-bá itt is érvényes, hogy egy adott alakfüggvény az adott csomópontbeli helyettesí-tési értéke egy, míg minden más csomópontbeli helyettesítési érték zérus.
7.3. A HÁROMCSOMÓPONTÚ ÉS A HATCSOMÓPONTÚ ELEMEK
A 7.3.ábra a háromcsomópontú és a görbeperemű, hatcsomópontú elemeket mutatja:

VÉGESELEM-MÓDSZER ALAPJAI 47
7.3. ábra
a/ a háromcsomópontú, b/ a hatcsomópontú, görbeperemű izoparametrikus elem
Az előbbiek alakfüggvényei:
1 1N ξ η= − − 2N ξ= 3N η= (7.8)
míg a hatcsomópontú elemé:
1 4 6 2 4 5
3 5 6 4
5 6
1 1 1 11
2 2 2 21 1
4 12 2
4 4 1
N ξ η N N N ξ N N
N η N N N ξ( ξ η)
N ξη N η( η)ξ
= − − − − = − −
= − − = − −
= = − −
(7.9)
7.4. AZ ALAKVÁLTOZÁSI VEKTOR ELŐÁLLÍTÁSA
A korábbi fejezetekben mondottak értelmében az x, y globális koordináta-rendszerbeli mezők deriváltjait is approximálni kell. A két koordináta-rendszer közötti leképezést az előzőekkel összhangban
1
( , )csn
i ii
x N xξ η=
=∑ 1
( , )csn
i ii
y N yξ η=
=∑ (7.10)
formulák adják, ahol csn az adott elemmodell csomópontjainak száma (Előző pél-
dáinkban 3, 6 illetve 4 vagy 8). Kétváltozós feladatok esetén az elmozdulás koor-dináták közelítésére az
1
( , )csn
i ii
u N uξ η=
=∑ 1
( , )csn
i ii
v N n vξ=
=∑ (7.11)

48 VÉGESELEM-MÓDSZER ALAPJAI
összefüggések szolgálnak (7.11) szokás szerint tömörebben is írható!
1 2
1 2
00 0... ( , )
0 0 0cs
cs
ene e e e
n
NN Nu
N Nv Nξ η
= = ≡
u q N q (7.12)
ahol
1 1, ,... , ,... ,cs cs
eTi i n nu v u v u v = q
az elem 2 csn⋅ méretű elmozdulásvektora.
Ezek után felírandó az alakváltozási vektor
ii
ix
e iy i
ixy
i ii i
i
Nu uxx
Nvv
y y
u v N Nu vy x y x
εεγ
∂ ∂ ∂ ∂ ∂∂ = = = ∂ ∂ ∂ ∂ ∂ ∂+ + ∂ ∂ ∂ ∂
∑
∑
∑
ε (7.13)
alakban, amiből látszik, hogy a ehhez szükséges az alakfüggvények globál koordi-
náta-rendszerbeli ,i iN N
x y
∂ ∂∂ ∂
parciális deriváltjainak
i i ii
i i i i
N N NNx xx x x
N N N Ny yy y y
ξ η ξ ηξ η ξ
ξ ηξ ηξ η η
∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ⋅ + ⋅ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ = =∂ ∂ ∂ ∂ ∂ ∂∂ ∂ + ⋅ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
(7.14)
meghatározása. (7.14)-et is célszerű tömörebben felírni
( ) ( ) ( )1 1
11 1211 1
21 22G i L i L i
J JN N N
J J
− −−
− −
= =
J∂ ∂ ∂ (7.15)
ahol J-1 a Jacobi mátrix inverze ( )G∂ a globálrendszerbeli deriváltak vektora
( )L∂ a lokálrendszerbeli deriváltak vektora.
A ,ξ η rendszerbeli parciális deriváltakra analóg módon írható, hogy
i i
ii
N x y N
xNN x yy
ξ ξ ξ
η ηη
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ =
∂ ∂ ∂ ∂ ∂∂ ∂∂
(7.16)

VÉGESELEM-MÓDSZER ALAPJAI 49
vagyis
( ) ( ) ( )11 12
21 22L i G i G i
J JN N N
J J
= =
J∂ ∂ ∂ (7.17)
így azután a Jacobi mátrix (7.10) felhasználásával
1 1
2,2
... ...
... ...cs cs
i ii i i
i i
i iii i
n ni i
i i
N NN
x yx y
x yNN N x y
x y
ξ ξ ξ
ηη η
∂ ∂ ∂ ∂ ∂ ∂ = = ∂∂ ∂ ∂ ∂ ∂
∑ ∑
∑ ∑J (7.18)
módon számítható. Ezek után (7.15) figyelembevételével az x és y szerinti parciális deriváltakat ξ és η szerinti parciális deriváltakból az alábbi módon lehet előállí-
tani:
1 111 12
1 121 22
i i
i i
N NNiJ J
x
N NNiJ J
y
ξ η
ξ η
− −
− −
∂ ∂∂= +∂ ∂ ∂
∂ ∂∂= +∂ ∂ ∂
(7.19)
Ez azt jelenti, hogy így előállítható a következő formula által definiált eB el-
mozdulás-alakváltozás transzformációs mátrix, amelyet szorozva a eq elem cso-
móponti elmozdulásvektorral, közvetlenül számítható az
11
1
1
1 1
0 0
0 ... 0 ... ( , )
i
e e ei
i
ii i
uNNvx x
NN
uy y
vN NN N
y x y x
ξ η
∂∂
∂ ∂ ∂∂
= = ∂ ∂ ∂ ∂∂ ∂
∂ ∂ ∂ ∂
ε B q (7.20)
elem alakváltozási vektora.
50 VÉGESELEM-MÓDSZER ALAPJAI
8. A KÉTVÁLTOZÓS FELADATTÍPUSOK MEGOLDÁSI LEHETŐSÉGE NUMERIKUS INTEGRÁLÁSSAL
Jelen fejezet első négy pontja a rugalmasságtan tipikus feladatait mutatja be, majd ismertetésre kerül a gyakran alkalmazott, numerikus integráláson alapuló végeselemes számítástechnika. Equation Chapter 8 Section 1
8.1. SÍKALAKVÁLTOZÁS (SA)
Amennyiben a vizsgált test geometriája és terhelése következtében létezik egy olyan irány, amely mentén a test pontjai nem mozdulnak el, valamint ezen kitünte-tett irányhoz tartozó helykoordinátától a reá merőleges síkban fellépő elmozdulásvektor koordinátái függetlenek, síkalakváltozásról szokás beszélni. Ez az eset áll fenn például egy hosszú, nem feltétlenűl körgyűrű keresztmetszetű, nagynyomású cső esetén, mikor is a csőtest pontjai csak a tengelyre merőleges metszetben mozdulnak el.
Legyen a kitüntetett irány z. Ekkor a szóbanforgó állapot kialakulásához az szükséges, hogy a térfogaton megoszló ρk terhelésnek és az pA felületen meg-
oszló p terhelésnek ne legyen z irányú összetevője. Igy azután az elmozdulásmező és a terhelési függvények
( )
( , ) ( )
( , )
x y
x x y y
x x y y
xy u v
x y k k
x y p p
ρ ρ ρ= = +
= = +
= = +
u u e e
k k e e
p p e e
(8.1)
alakban írhatók. Az A alakváltozási tenzor fentiekből adódóan

52 VÉGESELEM-MÓDSZER ALAPJAI
10
21
( , ) 02
0 0 0
x xy
x
yx y y
xy
x y
ε γε
γ ε εγ
= = ⇒ =
εA A (8.2)
míg a T feszültségi tenzor
( )0
, 0
0 0
x xy
yx y
z
x y
σ ττ σ
σ
= =
T T
ahol ( )z x yσ ν σ σ= +
Az 0zε ≡ miatt az alakváltozási energia számításánál csak a T tenzor síkbeli ré-
szével kell dolgozni, tehát
z xy
yx y
σ ττ σ
=
T (8.3)
Így végül is síkalakváltozás esetén, homogén izotróp anyagot feltételve az anyagtörvény
1 0
1 0(1 )(1 2 )
1 20 0
2
x x
y y
xy xy
Eσ ν ν εσ ν ν ε
ν νντ γ
−
⇒ = = − ≡ + − −
σ DεT (8.4)
8.2. SÍKFESZÜLTSÉGI ÁLLAPOT (SF)
A síkfeszültségi állapotot az jellemzi, hogy most a kitüntetett z irányra merőle-ges síkokon nem keletkezik 0z xz yzσ τ τ= = = feszültség. Ehhez az szükséges,
hogy a ρk és p terhelési függvényeknek ne legyen z irányú összetevője. A vékony
tárcsa középfelületére, ahol is 0z = , a terhelésnek, melyet az oldalperemen írunk elő, négyzetes függvényként kell változni.
Fentiek alapján a feszültségi tenzornak csak a síkbeli része lehet zérustól kü-lönböző
0
0 ( , )
0 0 0
x xy
yx y x y
σ ττ σ
= =
T T (8.5)

VÉGESELEM-MÓDSZER ALAPJAI 53
Ismét homogén, izotróp anyagot tételezünk fel, így a z irányú fajlagos nyúlás
( )1z x y
νε ε εν
= − +−
míg az A alakváltozási tenzor
10
21
0 ( , )2
0 0
x xy
x
yx y y
xyz
x y
ε γε
γ ε εγε
= = ⇒ =
εA A (8.6)
Tekintettel megint az alakváltozási energia kiszámítási módjára elegendő csak a tenzorok síkbeli részét megtartani:
2
1 0
1 01
10 0
2
x x
y y
xy xy
Eσ ν εσ ν ε
ν ντ γ
⇒ = = = − −
σ DεT (8.7)
8.3. ÁLTALÁNOS SÍKFESZÜLTSÉGI ÁLLAPOT (ÁSF)
A SF állapot szigorú kiindulási feltételeinek enyhítése céljából ez esetben felté-telezzük, hogy a zσ mindenhol zérus, a , ,x y xyσ σ τ a z –nek páros függvé-
nyei, a xyτ és a zyτ pedig a z –nek páratlan függvényei úgy, hogy közben a tárcsa
alsó és felsőlapjain zérus értékűek. Itt jegyezzük meg, hogy egyes munkákban az SF illetve ÁSF feladatokat saját síkjukban terhelt lemezfeladatoknak is nevezik.
Fenti feszültségi koordinátákra vonatkozó feltételek teljesüléséhez a terhelési függvények a térfogaton egyrészt
( , , ) ( , , )x y z x y zρ ρ= − ≡k k 0 (8.8)
másrészt a paláston
( , , ) ( , , ) , ( , , ) ( , , )
( , , ) ( , , )
x x y y z z
x x y y
z z
p p p
p x y z p x y z p x y z p x y z
p x y z p x y z
= + +
= − = −
= − −
p e e e
(8.9)
alakúak kell, hogy legyenek.
54 VÉGESELEM-MÓDSZER ALAPJAI
Az így megoldott terhelési feltételek mellett az egyes mechanikai mennyisége-ket a b vastagság mentén integrálva átlagértékeket kapunk. Így értelmezhető az átlagos feszültségi és alakváltozási tenzor
( )
1, ( )
b
dzb
= ↔∫T T T A (8.10)
valamint az „átlagos” elmozdulás és terhelési vektor
( )
1
b
dzb
= ∫u u (8.11)
( )
1x yx y
b
dz p pb
= = +∫p p e e (8.12)
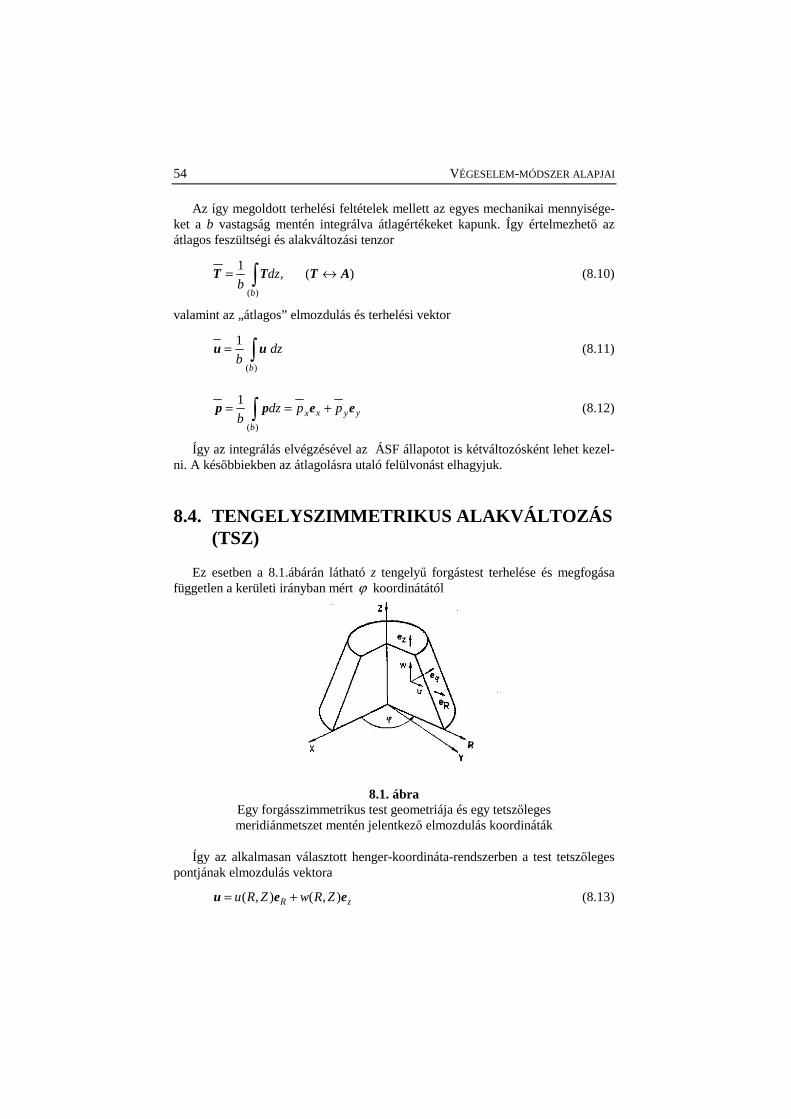
Így az integrálás elvégzésével az ÁSF állapotot is kétváltozósként lehet kezel-ni. A későbbiekben az átlagolásra utaló felülvonást elhagyjuk.
8.4. TENGELYSZIMMETRIKUS ALAKVÁLTOZÁS (TSZ)
Ez esetben a 8.1.ábárán látható z tengelyű forgástest terhelése és megfogása független a kerületi irányban mért ϕ koordinátától
8.1. ábra
Egy forgásszimmetrikus test geometriája és egy tetszőleges meridiánmetszet mentén jelentkező elmozdulás koordináták
Így az alkalmasan választott henger-koordináta-rendszerben a test tetszőleges pontjának elmozdulás vektora
( , ) ( , )R zu R Z w R Z= +u e e (8.13)

VÉGESELEM-MÓDSZER ALAPJAI 55
alakú, azaz a vizsgálatokat egy tetszőleges meridiánmetszet mentén az Rz síkban kétdimenziós feladatként lehet elvégezni.
Az alakváltozási és feszültségi vektorok
R
z
Rz
,
R
z
Rz
u
Ru
Rw
zu w
z R
ϕ ϕ
ε σε σε σγ τ
∂ ∂ = = = ∂ ∂ ∂ ∂ + ∂ ∂
ε σ (8.14)
között homogén izotróp anyagra az anyagállandók mátrixa
1 0
1 0
1 0(1 )(1 2 )
1 20 0 0
2
E
ν ν νν ν νν ν νν ν
ν
− −
= −+ − −
D (8.15)
teremt kapcsolatot.
=σ Dε (8.16)
8.5. AZ ELEMI MEREVSÉGI MÁTRIX ÉS A REDUKÁLT TERHELÉSI VEKTOR SZÁMÍTÁSA
A 8.1-8.4 pontokban ismertetett kétdimenziós feladattípusok sajátosságait fi-gyelembe véve a potenciális energia kifejezése mátrixos formában a (7.12) elmoz-dulás mező közelítéssel és az ε alakváltozási vektort értelmező (7.20) formula felhasználásával
( )
1 ( )
2e
e eT T e eT e e ep p qk
A
b dA εΠ = − + +∫q B DB q q f f f (8.17)
ahol
e
e T
A
b dA= ∫K B DB - elemi merevségi mátrix, az
0 e T
Ae
bdAε = ∫f B Dε - kezdeti alakváltozásból,
56 VÉGESELEM-MÓDSZER ALAPJAI
e
e Tp b d
Γ
= Γ∫f N p - felületi terhelésből, és
e
e Tk
A
b dAρ ρ= ∫f N k - a térfogati terhelésből
számítandó terhelési vektor. (8.17) felírásakor kihasználtuk, hogy ÁSF esetén az elemi térfogat, b vastagságú tárcsa esetén
dV b dA= (8.18)
Ugyanez SA esetén 1b = egységnyi szeletre míg TSZ állapotváltozáskor (8.17)-be
2b Rπ=
helyettesítésével kapjuk hogy
2dV RdAπ= . (8.19)
8.6. NUMERIKUS INTEGRÁLÁS
A (8.17)-es kifejezésben szereplő felületi integrálok a ,ξ η változók függvé-
nyei, így az integrálást ξ és η szerint -1 és +1 intervallumra vonatkozóan kell
elvégezni. Mivel az elemi felület
detdA dx dy d dξ η= = J
formában írható. Ezért az elemi merevségi mátrix
1 1
1 1
dete T b d dξ η+ +
− −
= ∫ ∫K B DB J (8.20)
illetőleg a térfogati terhelés csomóponti vektor (és hasonlóan a kezdeti alakválto-zásból adódó csomóponti vektor)
1 1
1 1
det e Tk b d dρ ρ ξ η
− −
= ∫ ∫f N k J (8.21)
szerint állítható elő. A peremen működő terhelés számításához és a Jacobi mátrix determinánsára
van szükség. Nem részletezve a levezetést csak utalva a [1]-es hivatkozásra, pél-dául egy elem 1η = izoparametrikus koordinátával jellemezhető oldala mentén
müködő x irányú px megoszló terhelésből

VÉGESELEM-MÓDSZER ALAPJAI 57
1
1
( , 1) det d0xe T T
p
e
pb d bξ η ξΓ
Γ −
= Γ = =
∫ ∫f N p N J (8.22)
elemi redukált csomóponti tehervektor származtatható. Kérdés ezek után a (8.17) típusú integrálok előállítása, melynek széles körben
alkalmazott módszere a Gauss-féle numerikus integrálási technika. Ennek értelmé-
ben a (8.17) formula integranduszban szereplő mátrix-szorzatot ( ),e x yF -al jelöl-
ve a
( , ) ( , ) ( , ) ( , ) ( , )e T e
Ae Ae
x y x y x y b x y dA x y dA= ≡ =∫ ∫K B D B F (8.23)
1 1
1 11 1
( ( , ), ( , ) det ( , ) det ( , ) ( , )NG NG
e e e ei j i j i j
i j
x y d d W Wξ η ξ η ξ η ξ η ξ η ξ η= =− −
= =∑∑∫ ∫ F J J F
míg például a (8.22) szerinti perem menti integrál
1
1
( , 1) ( ) ( , 1)det ( , 1)e T Tp
e
bd b dξ η ξ ξ η ξ η ξΓ
Γ −
= Γ = = = =∫ ∫f N p N p J (8.24)
formában számolható. Fenti képletekben NG a ξ illetve η irányban felvett Gauss integrációs pontok
számát ,i jW W pedig az integrációs súlyfokokat jelenti, amelyeket számszerűen a
8.1 és 8.2 táblázat is bemutat.
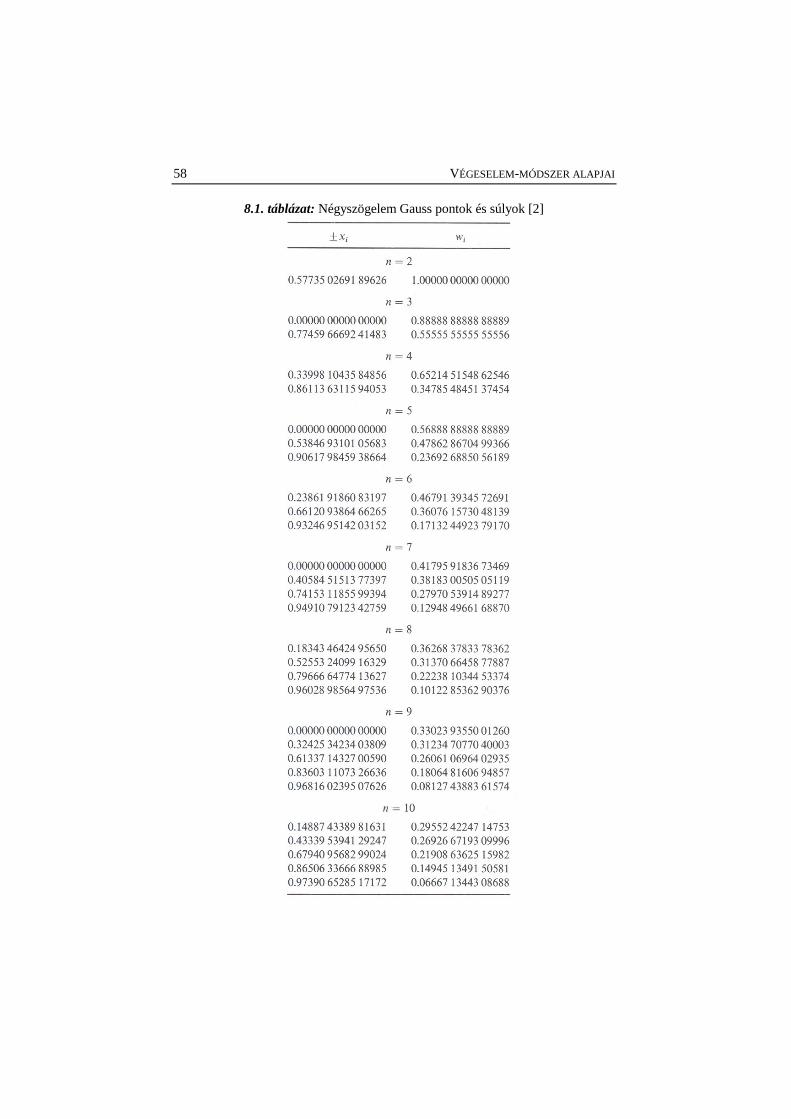
58 VÉGESELEM-MÓDSZER ALAPJAI
8.1. táblázat: Négyszögelem Gauss pontok és súlyok [2]
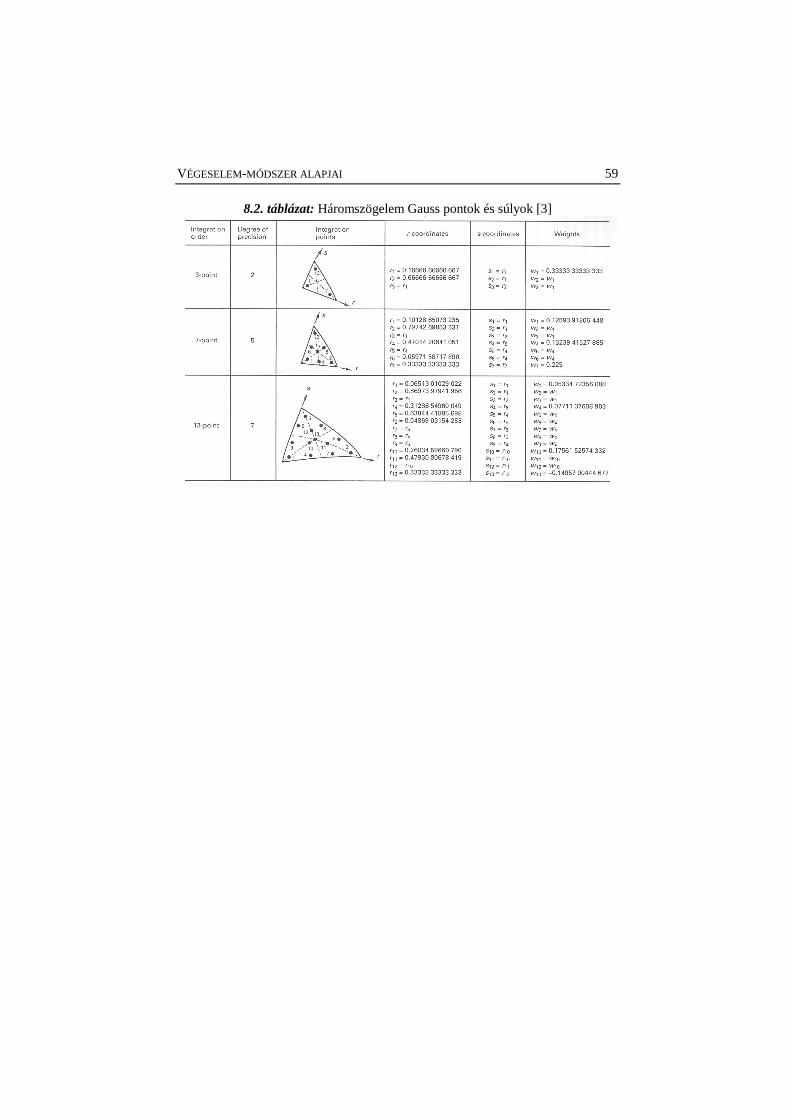
VÉGESELEM-MÓDSZER ALAPJAI 59
8.2. táblázat: Háromszögelem Gauss pontok és súlyok [3]

60 VÉGESELEM-MÓDSZER ALAPJAI
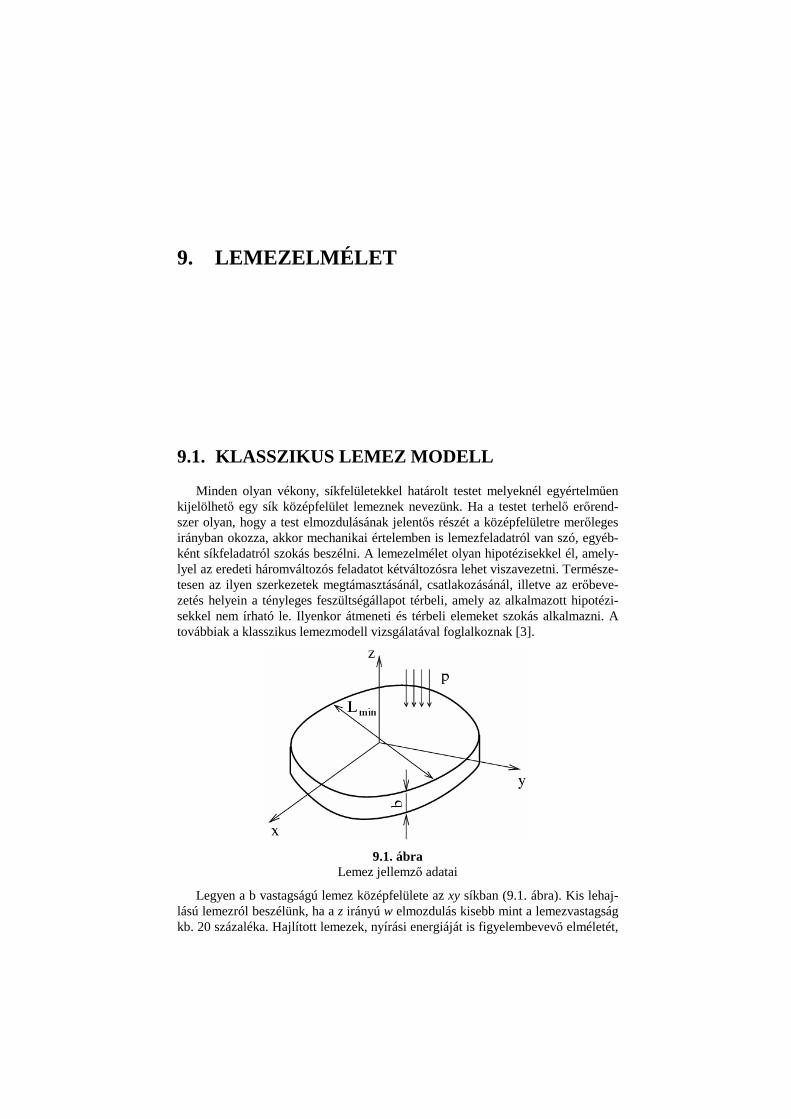
9. LEMEZELMÉLET
9.1. KLASSZIKUS LEMEZ MODELL
Minden olyan vékony, síkfelületekkel határolt testet melyeknél egyértelműen kijelölhető egy sík középfelület lemeznek nevezünk. Ha a testet terhelő erőrend-szer olyan, hogy a test elmozdulásának jelentős részét a középfelületre merőleges irányban okozza, akkor mechanikai értelemben is lemezfeladatról van szó, egyéb-ként síkfeladatról szokás beszélni. A lemezelmélet olyan hipotézisekkel él, amely-lyel az eredeti háromváltozós feladatot kétváltozósra lehet viszavezetni. Természe-tesen az ilyen szerkezetek megtámasztásánál, csatlakozásánál, illetve az erőbeve-zetés helyein a tényleges feszültségállapot térbeli, amely az alkalmazott hipotézi-sekkel nem írható le. Ilyenkor átmeneti és térbeli elemeket szokás alkalmazni. A továbbiak a klasszikus lemezmodell vizsgálatával foglalkoznak [3].
9.1. ábra Lemez jellemző adatai
Legyen a b vastagságú lemez középfelülete az xy síkban (9.1. ábra). Kis lehaj-lású lemezról beszélünk, ha a z irányú w elmozdulás kisebb mint a lemezvastagság kb. 20 százaléka. Hajlított lemezek, nyírási energiáját is figyelembevevő elméletét,

62 VÉGESELEM-MÓDSZER ALAPJAI
Reissner-Mindlin elméletnek is szokás nevezni [3]. Ezek szerint egy tér-beli pont elmozdulása az elmodulási hipotézis alapján származtatható.
9.2. ábra Elmozdulás hipotézis
Elmozdulási hipotézis szerint a középfelület csak z irányba mozdul el, továbbá a középfelület normálisa merevtestszerûen elfordul (egyenes marad és hossza nem változik, azonban nem marad merõleges a középfelületre). Feltételezzük, hogy az elmozdulás és alakváltozás kicsi. A normális x és y tengely körüli szögelfordulása
xϕ , és yϕ szintén kicsi. Ekkor az elmozdulás egy tetszőleges P pontban az alábbi
alakban írható (lásd 9.2. ábrát, melyen a szögelfordulást felnagyítva szemléltetjük): Equation Chapter 9 Section 1
( )( )
( )
,
,
,
y
x
u x y z
v x y z
w w x y
ϕ
ϕ
= ⋅
= − ⋅
=
(9.1)
A középfelülethez kötött xϕ , yϕ , ( ),w x y segítségével bármely térbeli pontban
meghatározhatjuk az alakváltozás jellemzőit is.
0
yx y
xy
z
uz z
x xv
zy y
w
z
′ ∂ϕ∂ε = = ϕ = ⋅∂ ∂
∂ϕ∂ε = = − ⋅∂ ∂
∂ε = =∂

VÉGESELEM-MÓDSZER ALAPJAI 63
y x
xy
xz y
yz x
u vz
y x y x
w u w
x z xw v w
y z y
∂ϕ ∂ϕ∂ ∂γ = + = ⋅ − ∂ ∂ ∂ ∂ ∂ ∂ ∂γ = + = + ϕ∂ ∂ ∂∂ ∂ ∂γ = + = − ϕ∂ ∂ ∂
Érdemes a z-től függő, és a z-től független jellemzőket külön mátrixba rendez-ni:
x
y
xy
y
x
y x
x
y
y x
z z
∂ϕ∂
∂ϕ∂
∂ϕ ∂ϕ∂ ∂
ε = ε = = ⋅ γ −
κ
ε κ (9.2)
ahol κ a görbületek oszlopvektora:
0 0
0 0
0
x
y
x
y
x y
w
ε
∂∂
∂∂∂ ∂∂ ∂
= − ϕ ϕ − u
κ
∂
(9.3)
A z-től független szögtorzulások pedig a következő kételemű vektorba rendez-hetők:
0 1
1 0
xz
xyz
y
x
y
w
γ
γ
∂∂∂∂
γ = = ϕ = γ − ϕ u
uγ
∂
∂ (9.4)
Látható, hogy az elmozdulási hipotézishez tartozó szögtorzulás két tagból áll. Az első tag a normális középfelülettel együtt történő mozgása miatt, a második pedig az ahhoz képest jelentkező szögelfordulás miatt van. Ezt szemlélteti az aláb-bi ábra példaként yzγ esetén:
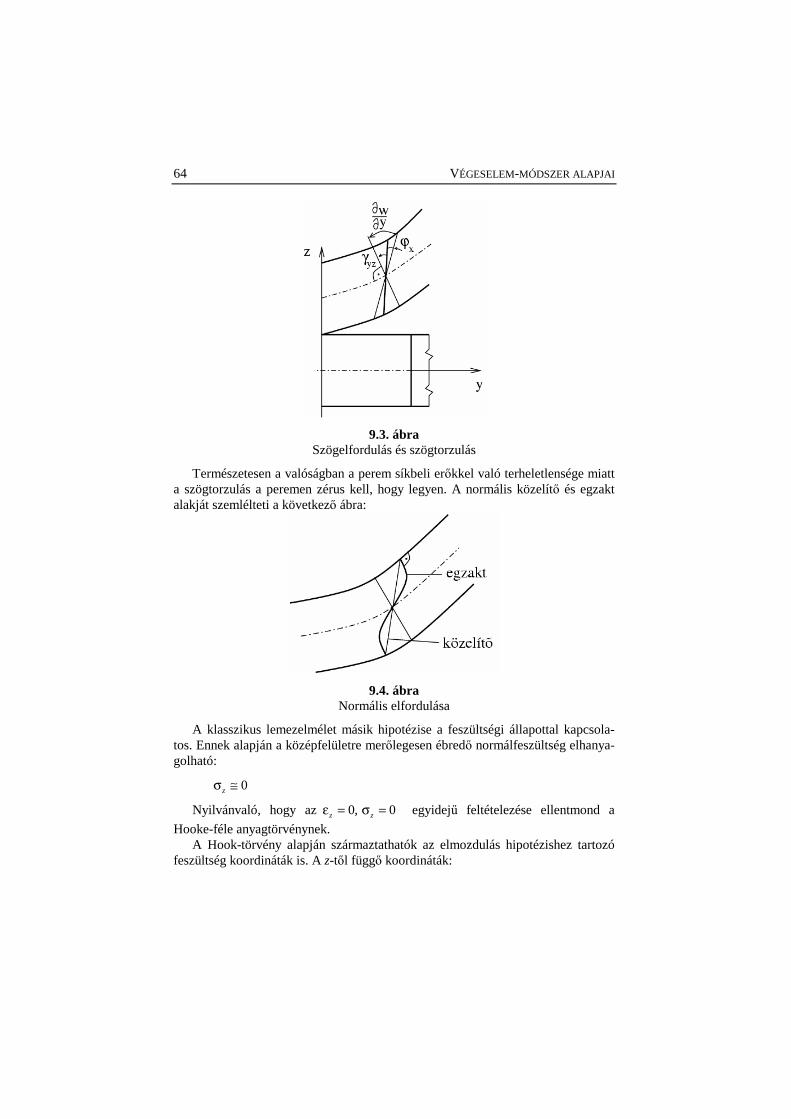
64 VÉGESELEM-MÓDSZER ALAPJAI
9.3. ábra Szögelfordulás és szögtorzulás
Természetesen a valóságban a perem síkbeli erőkkel való terheletlensége miatt a szögtorzulás a peremen zérus kell, hogy legyen. A normális közelítő és egzakt alakját szemlélteti a következő ábra:
9.4. ábra Normális elfordulása
A klasszikus lemezelmélet másik hipotézise a feszültségi állapottal kapcsola-tos. Ennek alapján a középfelületre merőlegesen ébredő normálfeszültség elhanya-golható:
0zσ ≅
Nyilvánvaló, hogy az 0, 0 z zε = σ = egyidejű feltételezése ellentmond a
Hooke-féle anyagtörvénynek. A Hook-törvény alapján származtathatók az elmozdulás hipotézishez tartozó
feszültség koordináták is. A z-től függő koordináták:
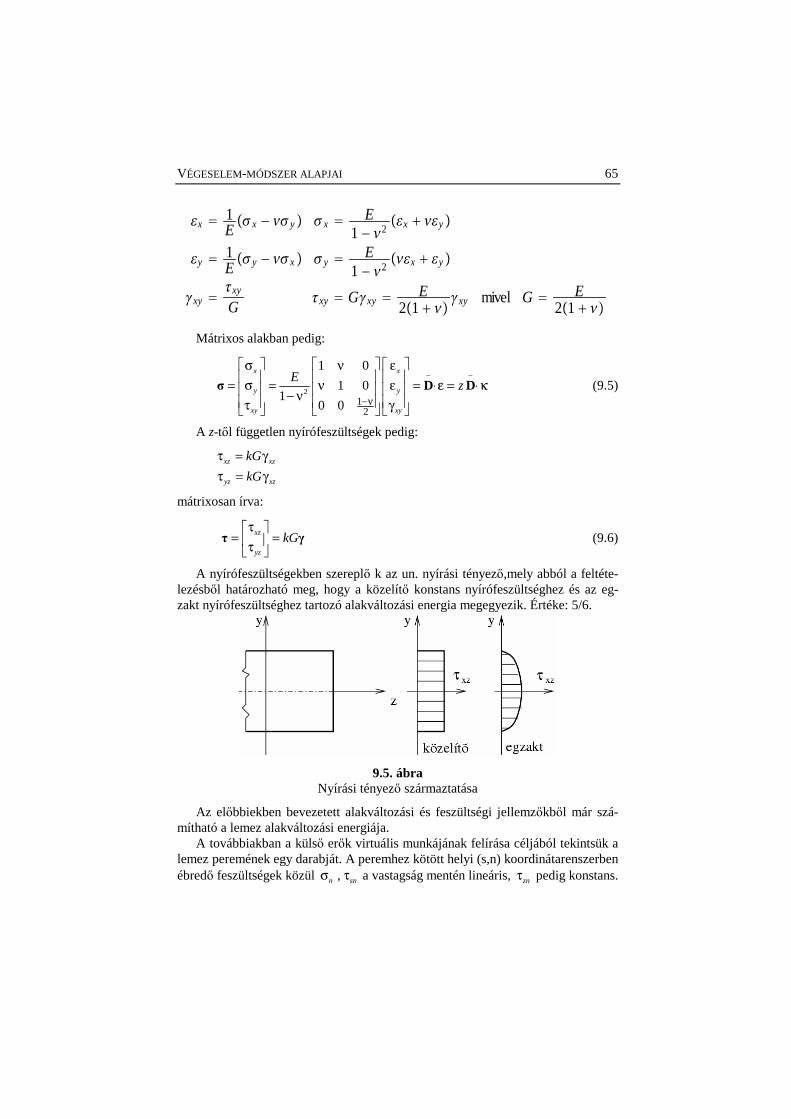
VÉGESELEM-MÓDSZER ALAPJAI 65
x 1Ex y x E
1 2x y
y 1Ey x y E
1 2x y
xy xy
Gxy Gxy E
21 xy mivel G E
21
Mátrixos alakban pedig:
2
12
1 0
1 01
0 0
x x
y y
xy xy
Ez
−ν
σ ν ε = σ = ν ε = ⋅ = ⋅ − ν τ γ
σ D D∼ ∼
ε κ (9.5)
A z-től független nyírófeszültségek pedig:
xz xz
yz xz
kG
kG
τ = γτ = γ
mátrixosan írva:
xz
yz
kGτ
= = τ τ γ (9.6)
A nyírófeszültségekben szereplő k az un. nyírási tényező,mely abból a feltéte-lezésből határozható meg, hogy a közelítő konstans nyírófeszültséghez és az eg-zakt nyírófeszültséghez tartozó alakváltozási energia megegyezik. Értéke: 5/6.
9.5. ábra Nyírási tényező származtatása
Az előbbiekben bevezetett alakváltozási és feszültségi jellemzőkből már szá-mítható a lemez alakváltozási energiája.
A továbbiakban a külső erők virtuális munkájának felírása céljából tekintsük a lemez peremének egy darabját. A peremhez kötött helyi (s,n) koordinátarenszerben ébredő feszültségek közül ,n snσ τ a vastagság mentén lineáris, znτ pedig konstans.
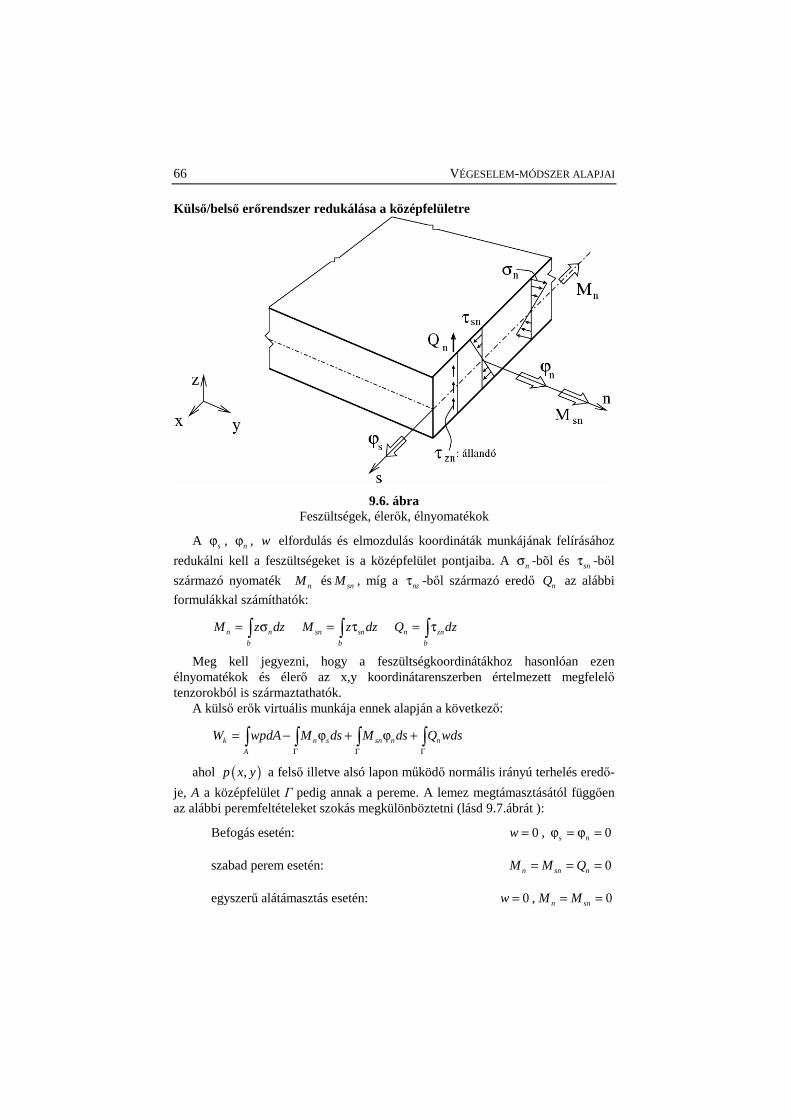
66 VÉGESELEM-MÓDSZER ALAPJAI
Külső/belső erőrendszer redukálása a középfelületre
9.6. ábra Feszültségek, élerők, élnyomatékok
A sϕ , nϕ , w elfordulás és elmozdulás koordináták munkájának felírásához
redukálni kell a feszültségeket is a középfelület pontjaiba. A nσ -bõl és snτ -ből
származó nyomaték nM és snM , míg a nzτ -ből származó eredő nQ az alábbi
formulákkal számíthatók:
n n sn sn n zn
b b b
M z dz M z dz Q dz= σ = τ = τ∫ ∫ ∫
Meg kell jegyezni, hogy a feszültségkoordinátákhoz hasonlóan ezen élnyomatékok és élerő az x,y koordinátarenszerben értelmezett megfelelő tenzorokból is származtathatók.
A külső erők virtuális munkája ennek alapján a következő:
k n s sn n n
A
W wpdA M ds M ds Q wdsΓ Γ Γ
= − ϕ + ϕ +∫ ∫ ∫ ∫
ahol ( ),p x y a felső illetve alsó lapon működő normális irányú terhelés eredő-
je, A a középfelület Г pedig annak a pereme. A lemez megtámasztásától függően az alábbi peremfeltételeket szokás megkülönböztetni (lásd 9.7.ábrát ):
Befogás esetén: 0w = , 0s nϕ = ϕ =
szabad perem esetén: 0n sn nM M Q= = =
egyszerű alátámasztás esetén: 0 , 0n snw M M= = =
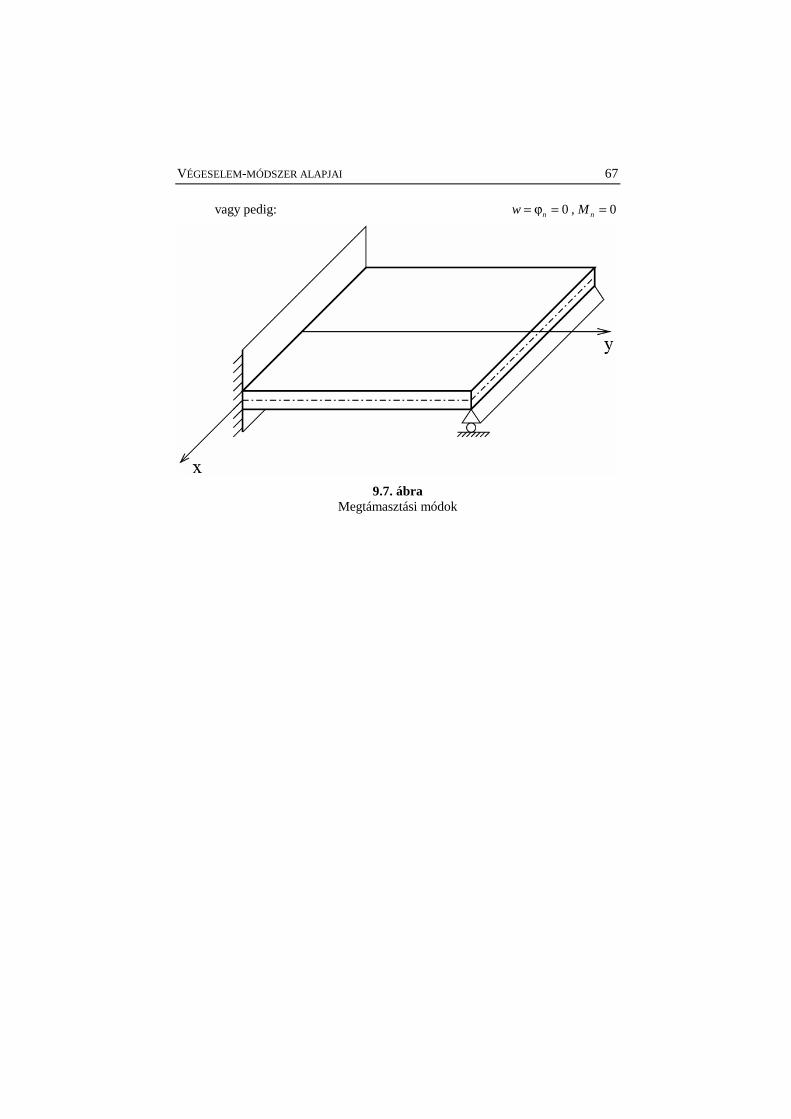
VÉGESELEM-MÓDSZER ALAPJAI 67
vagy pedig: 0 , 0n nw M= ϕ = =
9.7. ábra Megtámasztási módok

68 VÉGESELEM-MÓDSZER ALAPJAI

10. IZOPARAMETRIKUS LEMEZELEM
10.1. POTENCIÁLIS ENERGIA
A 9. fejezetben megismert összefüggések fehasználásával felépíthető a REISSNER – MINDLIN féle lemez teljes potenciális energiája [4]:
2
2
1 1
2 2
1 01 1
0 12 2
1 1
2 2
nyh
b
T Tk
A b A b
T Tk
A b A
z dz
T Th ny k
A A
dzdA dzdA W
z dz dA k G b dA W
dA dA W
=
Π = ⋅ + ⋅ −
Π = + ⋅ −
Π = ⋅ ⋅ + ⋅ ⋅ −
∫∫ ∫∫
∫ ∫ ∫
∫
∫ ∫
D∼
ε σ γ τ
κ κ γ γ
κ κ γ γ
DD D
D D
ahol Equation Chapter 10 Section 1
( )3 3
21
2
1 01 0
1 0 ,0 112 12 1
0 0h ny
b E bk G b
−ν
ν = = ν = − ν
D D D
továbbá
0 0 0
p p p
k n s sn n n
A
W wpdA M ds M ds Q wdsΓ Γ Γ
= − ϕ + ϕ +∫ ∫ ∫ ∫ (10.1)
Itt a 0-val indexelt élnyomatékok és élerő előírt értékek a peremen. A perem normálisának és érintőjének irányvektora legyen:

70 VÉGESELEM-MÓDSZER ALAPJAI
,x yn s
y x
n n
n n
− = =
e e
ekkor
,n x x y y sn x y y xn n n nϕ = ϕ + ϕ ϕ = −ϕ + ϕ
10.2. IZOPARAMETRIKUS ELEM
Izoparametrikus elemet választva formálisan az elem lehajlási és szögelfordu-lási mezőit kell a megszokott módon alakfüggvények és csomóponti paraméterek szorzataként approximálni a 0C osztályú folytonosság biztosításához [1]:
e
e e ex
y
w = ϕ = ϕ
u N q (10.2)
ahol
1 ,ecs
e eeT T T eTi i xi yin
w = = ϕ ϕ q q q q
Ebből kiindulva képezhetők az alakváltozás jellemző vektorai:
( )( )
e e e e e eh
e e e e e eny
ε ε
γ γ
= ⋅ = ⋅ ⋅ = ⋅
= ⋅ = ⋅ = ⋅
u N q B q
γ u N q B q
κ ∂ ∂
∂ ∂
ahol az elmozdulás-alakváltozás mátrixok felépítése a következő:
[ ]
( )
0 0
0
0
eeh i h
e
i
e ii h
i i
N
xN
y
N N
x y
=
∂
∂ ∂
= − ∂ ∂ ∂
− ∂ ∂
B B
B
… …

VÉGESELEM-MÓDSZER ALAPJAI 71
[ ]
( )0
0
eeny i ny
e
ii
ei ny
ii
NN
xN
Ny
=
∂ ∂ =∂ − ∂
B B
B
… …
Az alakfüggvények deriválása a síkfeladatoknál leírtakhoz hasonlóan történik Az elem potenciális energiája:
1 1
2 2
J d d
e
eenye
h
e eT eT e e eT eT e eh h h ny ny ny kA
A
e e eh ny
dA dA W
ξ η↑
Π = ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ −
= +
∫ ∫K
K
q B D B q q B D B q
K K K
det
(10.3)
1
2eT e e
kWΠ = ⋅ ⋅ −q K q
Jól látszi, hogy a hajlításból és a nyírásból származó energiákhoz különböző merevségi mátrixok rendelhetők.
A külső erők virtuális munkája is kifejezhető a csomóponti elmozdulás és szögelfordulás paramétereivel:
0
0 0
0 0
0 0
0 0
e ep
ep
ne eT eT eT
k
A
eT eT eT ey n x sn
x y
p Q
W dA ds
n M n M ds
n n
Γ
Γ
= − + + − − =
∫ ∫
∫
q N N
q N q f
Végül az elem potenciális energiája a szokásos tömör alakban írható: 1
2eT e e eT eΠ = ⋅ ⋅ −q K q q f
A gyakorlatban az un. Lagrange-típusú approximációt felhasználó 4, 8, illetve 9 csomópontú izoparametrikus négyszög alakú elem a legelterjedtebb.A négycsomópontú elem egy bilineáris approximációt tartalmaz, alakja az alábbi:

72 VÉGESELEM-MÓDSZER ALAPJAI
10.1. ábra 4 csomópontú elem
ahol az alakfüggvények a következők:
( ) ( )11 1 1,..., 4
4i i iN i= + ξξ + ηη =
A 9 csomópontú négyszögelem oldalélei már parabolák is lehetnek. Ekkor az approximáció bikvadratikus, teljes másodfokú polinom.
A 9 csomópontú Lagrange-féle elem alakfüggvényei a következők. A sarokpontokban:
( )( )11 1 1,..., 4
4i i i i iN i= ξηξ η + ξξ + ηη =
az oldalfelező pontokban:
( ) ( )211 1 5,7
2i iN i i= ξξ + ξξ − η =
( ) ( )211 1 6,8
2i iN i i= ηη + ηη − ξ =
a kilencedik, középső pontban:
( ) ( )2 29 1 1N = − ξ − η
Ezen kívül használatos a szűkített approximációt tartalmazó 8 csomópontú elem is (un. serendipity elem).

VÉGESELEM-MÓDSZER ALAPJAI 73
10.2. ábra 8 csomópontú elem
Ekkor az alakfüggvények a következők:
( ) ( )( )( )
( ) ( )( )
( ) ( )( )
2
2
1, 1 1 1 , 1,2,3,4
41
, 1 1 , 5,721
, 1 1 , 6,82
i i i i i
i i
i i
N i
N i
N i
ξ η = + ξξ + ηη ξξ + ηη − =
ξ η = − ξ + ηη =
ξ η = − η + ξξ =
Ezen belűl szokás csak a szögelfordulás közelítését szűkíteni (un. Heterosis elem). Ezek a verziók az elem b vastagságának csökkenésekor fellépő numerikus nehézségeket kívánják leküzdeni. Ekkor ugyanis a nyírási energia tart a zérushoz ami a megfelelő merevség mátrix kondicióját rontja. Számítási tapasztalatok azt mutatják, hogy a különböző elemekhez a numerikus integrálást is megfelelően kell megválasztani.
10.3. KIRCHHOFF-FÉLE VÉKONY LEMEZ
A korábbi elmozdulási feltételek itt is érvényben vannak, igaz, hogy 0xz yzγ = γ = . Azaz a normálisok normálisok maradnak a deformáció során, nem
úgy mint a vastag lemez elméletnél feltételeztük. A normális szögelfordulása ezért most kifejezhető a lehajlás deriváltjaival:
,x y
w w
y x
∂ ∂ϕ = ϕ = −∂ ∂
Így az elem alakváltozása már másodrendű deriváltakat is tartalmaz, ami miatt 1C -rendben folytonos elemeket kell alkalmazni. A vékony lemezekre számos
elemfajta került kidolgozásra. Ezek ismertetésétől most eltekintünk.
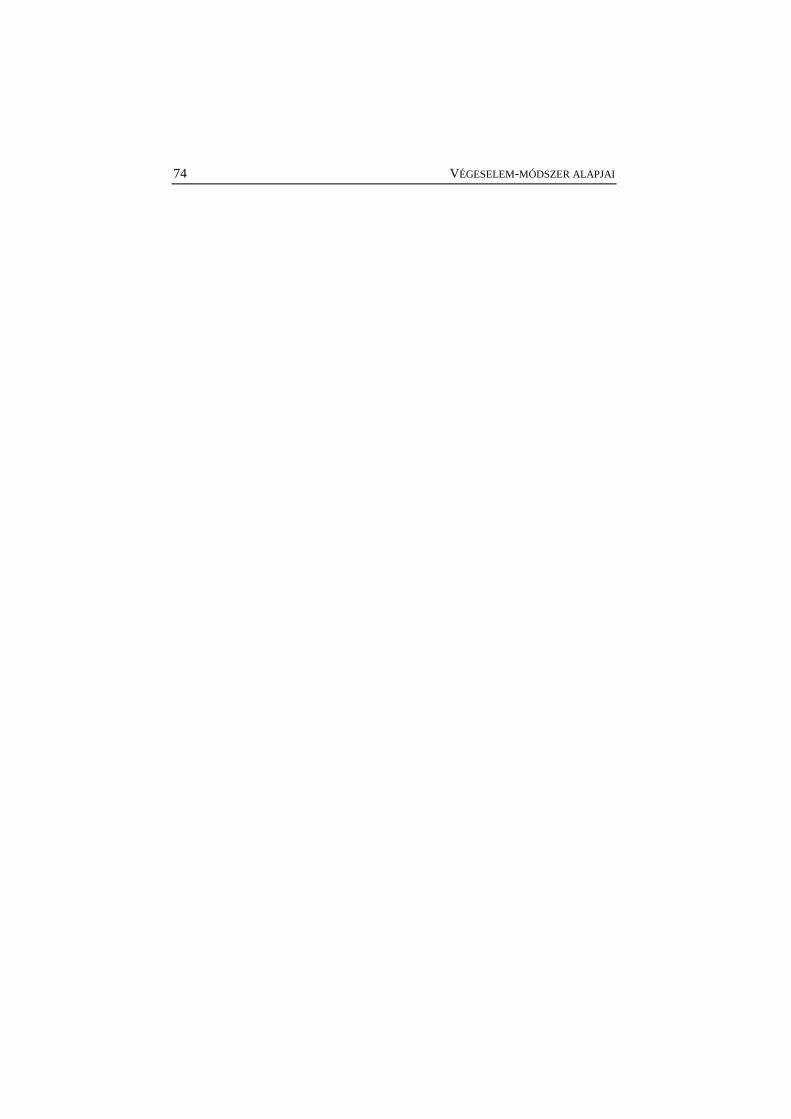
74 VÉGESELEM-MÓDSZER ALAPJAI

11. TÉRBELI ELEMEK
A térbeli elemek közül a legelterjedtebbek az izoparametrikus elemek, amelyek sokféle geometriai alakot ölthetnek. Ezek közül a leggyakrabban alkalmazottak az egyenes illetve görbült élekkel rendelkező hatlapú (hexahedron) „tégla”-, négyol-dalú (tetraéder) „gúla”-, vagy ötoldalú (pentaéder) „ék alakú” elemek. Ha minden él csak egyenes vonalú lehet, akkor az elemen belül az approximáció lineáris, ha mindegyik görbülhet is, akkor, pedig legalább kvadratikus. Természetesen görbült- és egyenes él, azaz lineáris- és kvadratikus közelítés (approximáció) vegyesen is előfordulhat egy-egy elemen belül. A görbült elem élein, a végpontokon kívül, a felező pontokban is van csomópont. Megjegyezzük, hogy magasabb approximáció alkalmazása esetén, az éleken akár kettő vagy három közbenső csomópont is elő-fordulhat, valamint további csomópontok lehetnek az oldallapokon és az elem bel-sejében is [1]. Equation Section 11
Itt részletesen ismertetjük a nyolc-csomópontú lineáris-, a 20 csomópontú kvadratikus hexahedron, valamint a 10 csomópontú kvadratikus tetraéder elem alakfüggvényeit. Ezt követően a merevségi mátrix és terhelési vektor előállítása a különböző elemekre egységes formalizmus szerint történik.
Az elem csomópontjai három - x,y,z irányú elmozdulási - szabadságfokkal ren-delkeznek, ezért terhelés a csomópontokban is csak ugyan ilyen irányú erő lehet.
11.1. AZ ALAKFÜGGVÉNYEK ÉS A KÖZELÍTÉS
A 11.1. ábra egy térbeli nyolc-csomópontú izoparametrikus elemet szemléltet. Az elem alakfüggvényei kvázi lineáris alakban adható meg [3]:
( )( )( ) ( )( )( )1 2
1 11 1 1 1 1 1
8 8N Nξ η ζ ξ η ζ= − − − = + − − (11.1)
( )( ) ( ) ( )( )( )3 4
1 11 1 1 1 1 1
8 8N Nξ η ζ ξ η ζ= + + − = − + − (11.2)
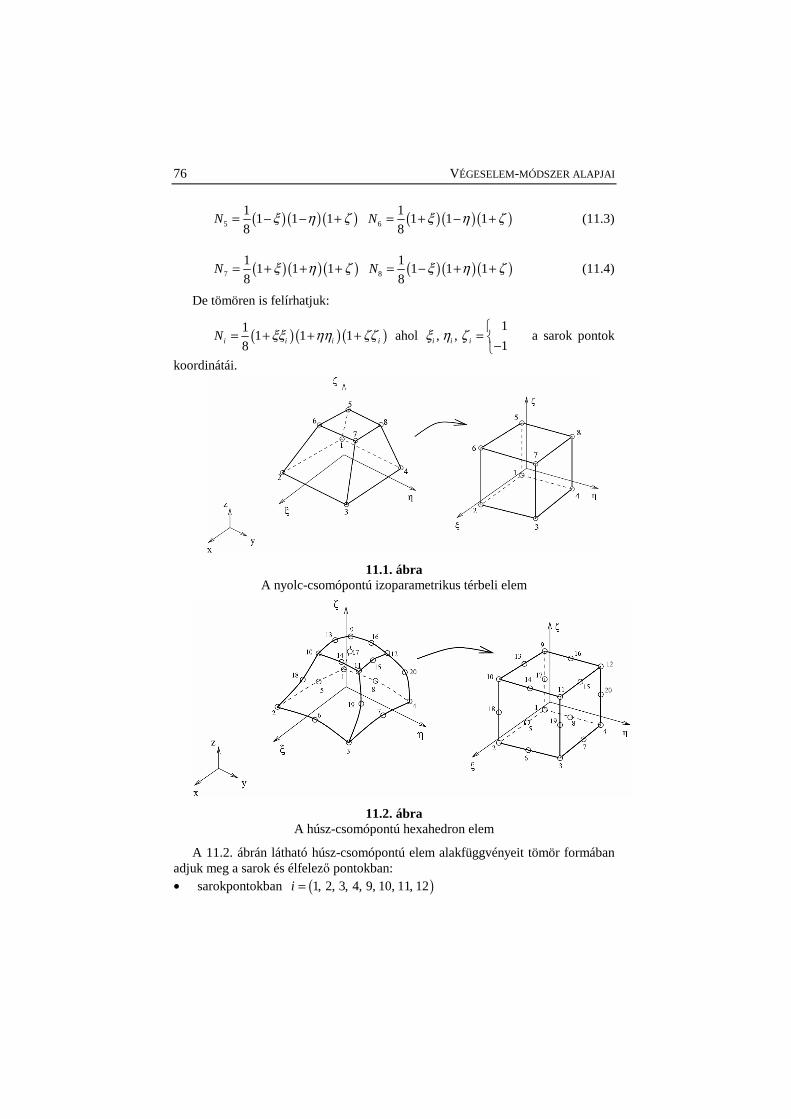
76 VÉGESELEM-MÓDSZER ALAPJAI
( ) ( )( ) ( )( )( )5 6
1 11 1 1 1 1 1
8 8N Nξ η ζ ξ η ζ= − − + = + − + (11.3)
( )( )( ) ( )( )( )7 8
1 11 1 1 1 1 1
8 8N Nξ η ζ ξ η ζ= + + + = − + + (11.4)
De tömören is felírhatjuk:
( ) ( ) ( )11 1 1
8i i i iN ξξ ηη ζζ= + + + ahol 1
, ,1 i i iξ η ζ
= − a sarok pontok
koordinátái.
11.1. ábra A nyolc-csomópontú izoparametrikus térbeli elem
11.2. ábra A húsz-csomópontú hexahedron elem
A 11.2. ábrán látható húsz-csomópontú elem alakfüggvényeit tömör formában adjuk meg a sarok és élfelező pontokban: • sarokpontokban ( )1, 2, 3, 4, 9, 10, 11, 12i =

VÉGESELEM-MÓDSZER ALAPJAI 77
( )( )( )( )11 1 1
8i i i i i i iN ξξ ηη ζζ ξξ ηη ζζ= + + + + +
• az élek felezőpontjában
• ahol 0ξ = és ( )7, 15, 13, 5i = ( )( )( )211 1 1
4i i iN ηη ζζ ξ= + + −
• ahol 0η = és ( )6, 14, 16, 8i = ( )( )( )211 1 1
4i i iN ξξ ζζ η= + + −
• ahol 0ζ = és ( )18, 19, 20, 17i = ( ) ( ) ( )211 1 1
4i i iN ξξ ηη ζ= + + −
A kereskedelmi szoftverekben a térbeli elemek közül leggyakrabban a tetraéder elemek fordulnak elő. Az irodalom a lineáris 4 csomópontú változat alkalmazását nem ajánlja, mert az eredmények esetenként túl nagy hibával terheltek. Ezért itt a 10 csomópontú kvadratikus változatot mutatjuk be (11.3. ábra), amely tulajdon-képpen a 4 csomópontú változat oldalfelező pontokban értelmezett alakfüggvé-nyek bővítésével, és az adott sarokpontba befutó éleken lévő közbenső csomó-pontok alakfüggvényeinek 0.5 szörösének levonásával áll elő.
11.3. ábra Kvadratikus tetraéder elem
Az alakfüggvények:
( )1 5 7 10
11
2N N N Nξ η ζ= − − − − + + ( )2 5 6 8
1
2N N N Nξ= − + + (11.5)
( )3 6 7 9
1
2N N N Nη= − + + ( )4 8 9 10
1
2N N N Nζ= − + + (11.6)
( )5 4 1N ξ ξ η ζ= − − − 6 4N ξη= ( )7 4 1N η ξ η ζ= − − − (11.7)
8 4N ξζ= 9 4N ηζ= ( )10 4 1N ζ ξ η ζ= − − − (11.8)

78 VÉGESELEM-MÓDSZER ALAPJAI
Az elem geometriájának leképzése a lokális a , ,ξ η ξ természetes koordináták
a globális , ,x y z koordináták között az alakfüggvények segítségével minden fent
bemutatott elemre egységesen írható fel:
( ) ( )1
, , , ,ncs
i ii
x N x x y zξ η ζ ξ η ζ=
= ↔ ↔∑ (11.9)
ahol ncs a vizsgált elem csomópontjainak a száma. Az izoparametrikus elemekre jellemző módon az elmozdulás közelítését app-
roximációját ugyan ezekkel az alakfüggvényekkel írjuk le. Ezért az alakfüggvé-nyeket szokás interpolációs függvényeknek is nevezni.
1
ncs
i ii
u N u u v w=
= ↔ ↔∑ (11.10)
Mátrixos formában átírva kapjuk, hogy
1
1
1 1
1
1
0 0 0 0
0 0 0 0
0 0 0 0e
e
ncs
ncs
ncs ncs
ncs
ncs
u
v
u N N w
v N N
w N N u
v
w
= = =
q
u Nq
………
N
(11.11)
11.2. ALAKVÁLTOZÁSOK ÉS FESZÜLTSÉGEK
A szimmetrikus alakváltozási- és feszültségi tenzorok független elemeiből alakváltozási- és feszültségi oszlopvektorokat képezünk.
Az alakváltozási vektor elemeit az elmozdulási mező deriváltjaiból állítjuk elő:
0 0
0 0
0 0
0
0
0
x
y
z
xy
yz
xz
ux xvy ywz z
u vy x y xv wz y z yw ux z x z
u
v
w
εεεγγγ
∂ ∂∂ ∂∂ ∂∂ ∂∂ ∂∂ ∂
∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂ ∂ ∂
⇒ = = = = = = + + +
B
u N q BqA ε
∂
∂ ∂ (11.12)

VÉGESELEM-MÓDSZER ALAPJAI 79
ahol a B alakfüggvények deriváltjait, tartalmazó mátrixot szokás alakváltozási-elmozdulási mátrixnak is nevezni. A számítások elvégzéséhez be kell vezetni a globális , ,x y z koordinátarendszerben értelmezett deriváló operátort
1 L
G
x x xx
y y y y
z z z z
ξ η ζξ
ξ η ζη
ξ η ζζ
−
∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂∂∂ ∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂∂∂ ∂ ∂ ∂
∂∂ ∂ ∂ ∂
= =
J ∂
∂ (11.13)
amelyet a lokális , ,ξ η ζ koordináták szerinti deriváltakkal állíthatunk elő. A diffe-
renciáló operátorok közötti kapcsolat megfordítva is érvényes, azaz
1G L L G
−= =J J∂ ∂ ∂ ∂ , (11.14)
ahol J Jacobi mátrix a következő módon számítható, mivel 1
ncs
i ii
x N x=
= ∑
1 1 1
2 2 2
1 2
1 2
1 2ncs ncs ncs
ncs
ncs
ncs
N N Nyx z
N Ny Nx z
y N N Nx z
x y z
x y z
x y z
ξ ξ ξξ ξ ξ
η η η η η η
ζ ζ ζ ζ ζ ζ
∂ ∂ ∂∂∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂ ∂
= =
J
…
…
…
(11.15)
A feszültségmezőt az alakváltozások ismeretében lineárisan rugalmas anyagot feltételezve a Hooke-féle anyag-egyenlettel adjuk meg. A független feszültségi mennyiségeket tartalmazó feszültségi vektor
Tx y z xy yz xzσ σ σ τ τ τ ⇒ = T σ (11.16)
az alábbi mátrixegyenlettel írható fel
= =D DBqσ ε (11.17)
ahol D az anyagjellemzők mátrixa
1 2 2
2 1 2
2 2 1
3
3
3
0 0 0
0 0 0
0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
c c c
c c c
c c c
c
c
c
=
D (11.18)
az egyes mátrix elemek a következő képletekkel adottak.

80 VÉGESELEM-MÓDSZER ALAPJAI
( )( ) ( )( ) ( )1 2 3
1
1 1 2 1 1 2 2 1
Ec E c E c G
ν νν ν ν ν ν
−= = = =+ − + − +
11.3. A MEREVSÉGI MÁTRIX
A csomóponti elmozdulásokkal kifejezett alakváltozások és feszültségek isme-retében az elem merevségi mátrixa az alakváltozási energia sűrűség térfogaton vett integráljából képezhető. Az izoparametrikus elem egyik előnye éppen abban mu-tatkozik, meg, hogy ezt az integrálást a , ,ξ η ζ természetes koordinátarendszerben
nagyon könnyen elvégezhetjük. A eK merevségi mátrixot végül is numerikus in-tegrálással a Gaussféle kvadratúra felhasználásával állítjuk elő.
( )
( )
1 1 1
1 1 1, ,
1 1 1
, , , 1, ,
e
i j k
e eT e eT e
d d dV
NG NG NG e
i j k i j k iji j k
dV d d d
w w w i j ncs
ξ η ζ ξ η ζ
ξ η ζ
ξ η ζ
− − −
= = =
= = =
= = =
∫ ∫ ∫ ∫
∑∑∑
K B DB B DΒ J
F Κ… …
JF
det
det
(11.19)
ahol egy-egy csomóponthoz, illetve csomopontpárhoz tartozó mátrixblokk külön is
megmutatható:
( )3,3
eT eij i j d d dξ η ζ= ∫∫∫K B DB Jdet (11.20)
11.4. TEHERVEKTOROK
Az elem terhelése lehet térfogaton- és felületen megoszló erő. Ezen elemtípus ese-
tén a nyomatéki terhelés nem értelmezett. Csak két különböző csomóponton mű-
ködő erőpárral fejthetünk ki nyomatéki terhelést.
11.4.1. Térfogati terhelés A térfogaton megoszló terhelés munkájának integráljából származtatható a te-
hervektor:
1 1 1
1 1 1e
e eT eT
VdV J d d dρ ρ ρ ξ η ζ
− − −= =∫ ∫ ∫ ∫f N k N k
F
(11.21)

VÉGESELEM-MÓDSZER ALAPJAI 81
ahol térfogati terhelés intenzitása lehet
gyorsulás
forgás
súly
ρ−= − −
k . Az integrálást a
térfogaton ismét a Gauss-féle kvadratúra segítségével hajtjuk végre. A tehervek-
torban az elem csomópontjainak a számával megegyező számú blokk található.
Vagyis a megoszló erőrendszerből a csomópontokba redukált tehervektort kap-
tunk.
(3, 1)
[ ] 1, ,e ei i ncsρ = =f f … (11.22)
11.4.2. Felületi terhelés A másik gyakori terhelési típus a felületen megoszló terhelés. Az ebből szár-
mazó tehervektor előállítása kissé komplikáltabb, mert a felületen képeznünk kell a területvektort is:
11.4. ábra Felületi terhelés az elem oldalán
A 11.4. ábrán az elem egyik oldalát a felületi normálissal ellentétes irányban p nagyságú megoszló erőrendszer terheli, a helyi rendszerben kifejezve: p= −p n .
A 11.5. ábrán látható felületelemvektor a ,ξ η koordinátairányú deriváltak segít-
ségével írható fel:
1 2ξ η∂ ∂= =∂ ∂
r ra a (11.23)
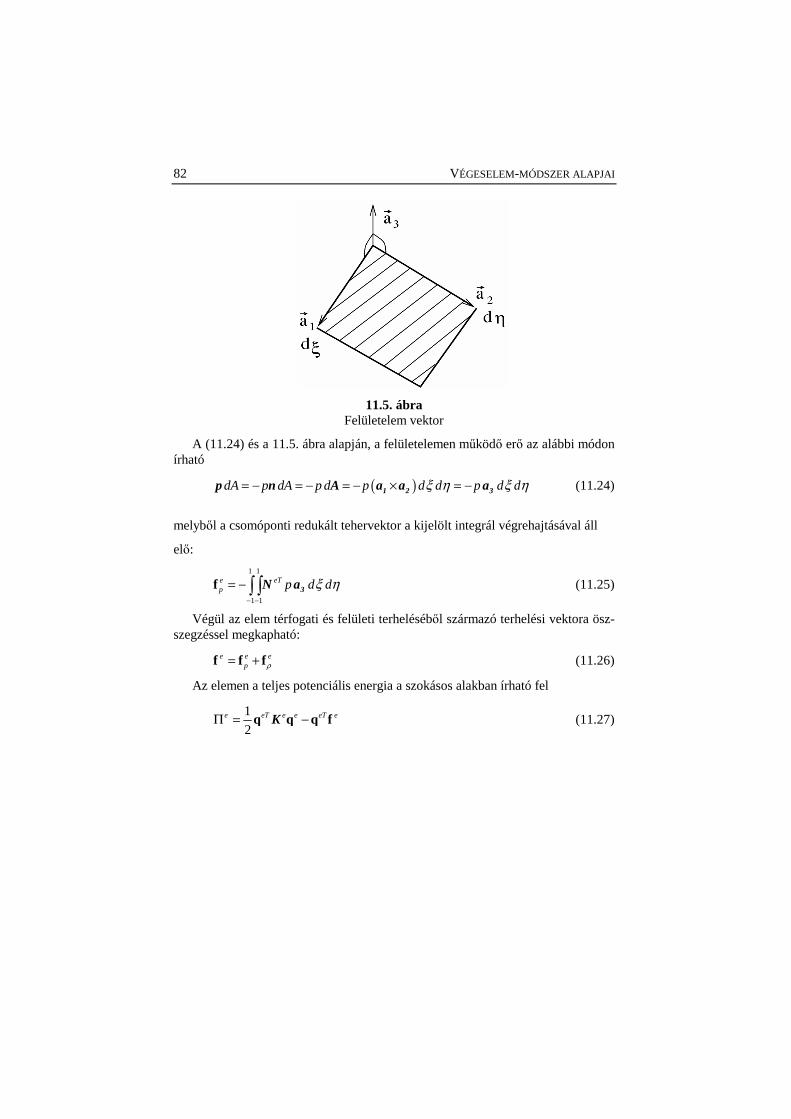
82 VÉGESELEM-MÓDSZER ALAPJAI
11.5. ábra Felületelem vektor
A (11.24) és a 11.5. ábra alapján, a felületelemen működő erő az alábbi módon írható
( )dA p dA p d p d d p d dξ η ξ η= − = − = − × = −1 2 3p n A a a a (11.24)
melyből a csomóponti redukált tehervektor a kijelölt integrál végrehajtásával áll
elő:
1 1
1 1
e eTp p d dξ η
− −
= −∫ ∫f 3N a (11.25)
Végül az elem térfogati és felületi terheléséből származó terhelési vektora ösz-szegzéssel megkapható:
e e ep ρ= +f f f (11.26)
Az elemen a teljes potenciális energia a szokásos alakban írható fel
1
2e eT e e eT eΠ = −q q q fK (11.27)
12. A MEGOLDÁS ÉS A HIBA
Egy valóságos szerkezet mechanikai modelljének végeselemes közelítő megol-dásakor kérdésként merül fel, hogy milyen a közelítés hibája és megoszlása, a megoldás hogyan pontosítható? Equation Section 12
A hiba származhat a modell hibájából, az anyag és terhelési adatok pontatlan-ságából, az alkalmazott közelítés jellegéből és az egyenletrendszer megoldása so-rán fellépő kerekítési hibákból is.
A végeselemes eljárás numerikus szempontból lineáris algebrai egyenletrend-szer megoldására vezeti vissza az eredeti parciális differenciálegyenlet-rendszereket is tartalmazó peremérték feladatot. Az egyenletrendszer szerkezete lényegesen befolyásolja a számítógépi tárolási- és megoldási szükségletét.
A végeselemes közelítés alapvetően polinomok alkalmazásával történik. Ha a közelítő függvény lineáris vagy kvadratikus, akkor a végeselemet h-verziójúnak, ha magasabb rendű, akkor p-verziójúnak nevezzük. Az első esetben a megoldás pontosítása az elem jellemző (h) méretének csökkentésével, míg a második esetben az elmozdulást közelítő polinomok (p) rendjének növelésével érhető el. A két módszer ötvözését hp-verzós eljárásnak hívjuk [2].
12.1. AZ EGYÜTTHATÓ MÁTRIX SZERKEZETE
Az egyes végeselemekre vonatkozóan, a korábbi fejezetekben bemutattuk az elemek merevségi mátrixának és terhelési vektorának származtatását. Ezen végeselemes mennyiségekkel is felírhatjuk az elemen a teljes potenciális energiát:
1
2e eT e e eT eΠ = −q K q q f , (12.1)
amely részben alakváltozási energiából és részben a külső erőrendszer munkájából épül fel. Az elem merevségi mátrixa az alakváltozási energiából, a tehervektor a külső erőrendszer munkájából származtatható.
Egy végeselemekre felosztott szerkezet teljes potenciális energiája az egyes elemek potenciális energiájának összegéből épül fel. A végeselem-módszer lehe-

84 VÉGESELEM-MÓDSZER ALAPJAI
tővé teszi nem csak azonos típusú, hanem geometriailag teljesen különböző alakú elemek csatolását is. Az lényeges, hogy az elemek illesztésekor ne sértsük meg az elmozdulás folytonosságát, idegen szóval kompatibilitását. Vagyis a csatlakozó elemek peremein azonos számú és szabadságfokú csomópont csatlakozzon. Ez azt jelenti, hogy a közös csomópontokba befutó elemek elmozdulásai kell, hogy meg-egyezzenek. A szerkezet csomóponti elmozdulás vektora ncs számú blokkot tartalmaz
1 2T T T T
ncs = q q q q… . (12.2)
Hasonlóan a szerkezet f csomóponti terhelési (redukált) vektora is, amely az
egyes elemeken értelmezett külsőerők munkájának összegzésével, illetve az ele-
mekhez nem rendelt koncentrált erőhatásokból kapható meg:
1
ncseT e k T
e
W=
+ =∑q f q f , (12.3)
ahol [ ] 1, , e ki i i i
e i
i ncs∈
= = = +∑f f f f f… .
A szerkezet merevségi mátrixa: K a z egyes elemek alakváltozási energiájá-nak összegzéséből származtatható a megfelelő csomópontokhoz-, illetve csomó-pont párokhoz tartozó merevségi mátrix blokkok összegeként:
1
eNeT e e T
e=
=∑q K q q Kq , (12.4)
ahol ,
[ ] , 1, , eij ij ij
e i j
i j ncs∈
= = = ∑K K K K… .
Végül a szerkezet teljes potenciális energiája hasonló alakban írható, mint az elem (12.1) teljes potenciális energiája:
1
1 1
2 2
eNeT e eT e k T T
e
W=
Π = − − = −
∑ q Kq q f q Kq q f . (12.5)
A teljes potenciális energia minimuma elvéből nyilvánvalóan következik, hogy az első variációja nulla kell, hogy legyen:
0Tδ δ ∂ΠΠ = =∂
(12.6)
Majd a (12.5) képleten végrehajtva a varráció műveletét kapjuk, hogy
( ) 0Tδ − =q Kq f . (12.7)
A kinematikai peremfeltételek figyelembe vétele után a szabad csomópontok elmozdulásának a variációja tetszőleges, ebből következik, hogy (12.7) egyenlet
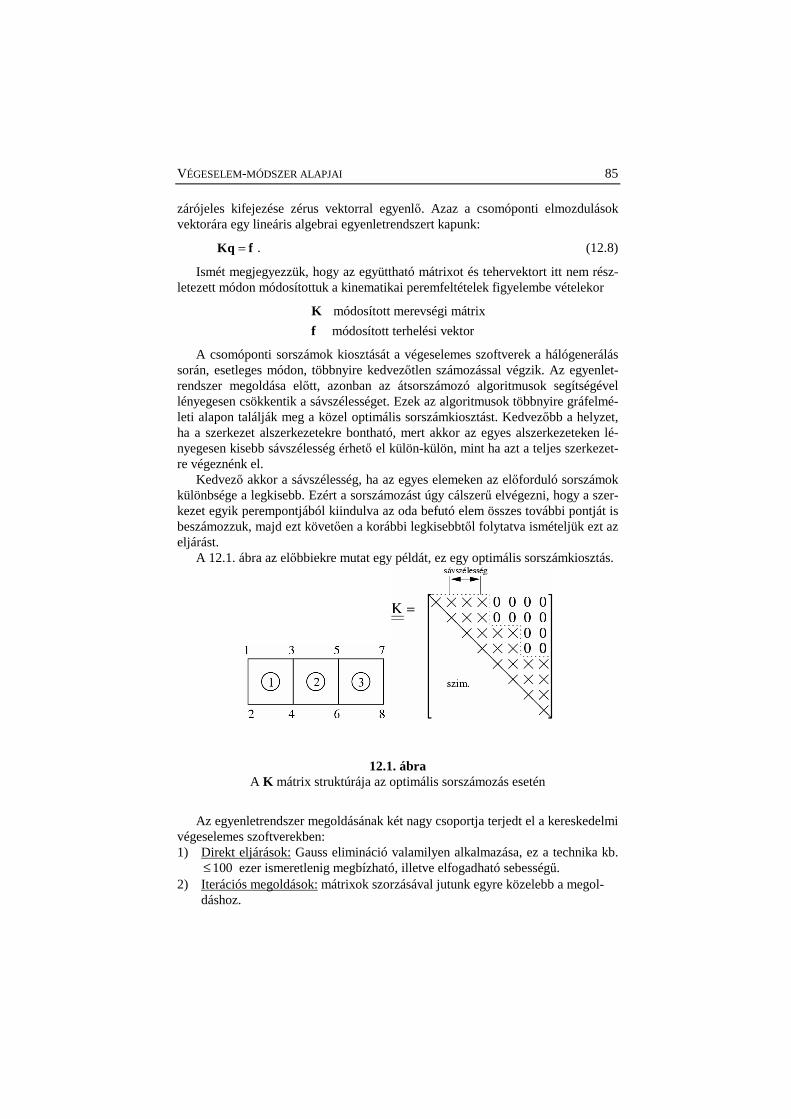
VÉGESELEM-MÓDSZER ALAPJAI 85
zárójeles kifejezése zérus vektorral egyenlő. Azaz a csomóponti elmozdulások vektorára egy lineáris algebrai egyenletrendszert kapunk:
=Kq f . (12.8)
Ismét megjegyezzük, hogy az együttható mátrixot és tehervektort itt nem rész-letezett módon módosítottuk a kinematikai peremfeltételek figyelembe vételekor
módosított merevségi mátrix
módosított terhelési vektor
K
f
A csomóponti sorszámok kiosztását a végeselemes szoftverek a hálógenerálás során, esetleges módon, többnyire kedvezőtlen számozással végzik. Az egyenlet-rendszer megoldása előtt, azonban az átsorszámozó algoritmusok segítségével lényegesen csökkentik a sávszélességet. Ezek az algoritmusok többnyire gráfelmé-leti alapon találják meg a közel optimális sorszámkiosztást. Kedvezőbb a helyzet, ha a szerkezet alszerkezetekre bontható, mert akkor az egyes alszerkezeteken lé-nyegesen kisebb sávszélesség érhető el külön-külön, mint ha azt a teljes szerkezet-re végeznénk el.
Kedvező akkor a sávszélesség, ha az egyes elemeken az előforduló sorszámok különbsége a legkisebb. Ezért a sorszámozást úgy cálszerű elvégezni, hogy a szer-kezet egyik perempontjából kiindulva az oda befutó elem összes további pontját is beszámozzuk, majd ezt követően a korábbi legkisebbtől folytatva ismételjük ezt az eljárást.
A 12.1. ábra az előbbiekre mutat egy példát, ez egy optimális sorszámkiosztás.
12.1. ábra A K mátrix struktúrája az optimális sorszámozás esetén
Az egyenletrendszer megoldásának két nagy csoportja terjedt el a kereskedelmi
végeselemes szoftverekben: 1) Direkt eljárások: Gauss elimináció valamilyen alkalmazása, ez a technika kb.
100≤ ezer ismeretlenig megbízható, illetve elfogadható sebességű. 2) Iterációs megoldások: mátrixok szorzásával jutunk egyre közelebb a megol-
dáshoz.
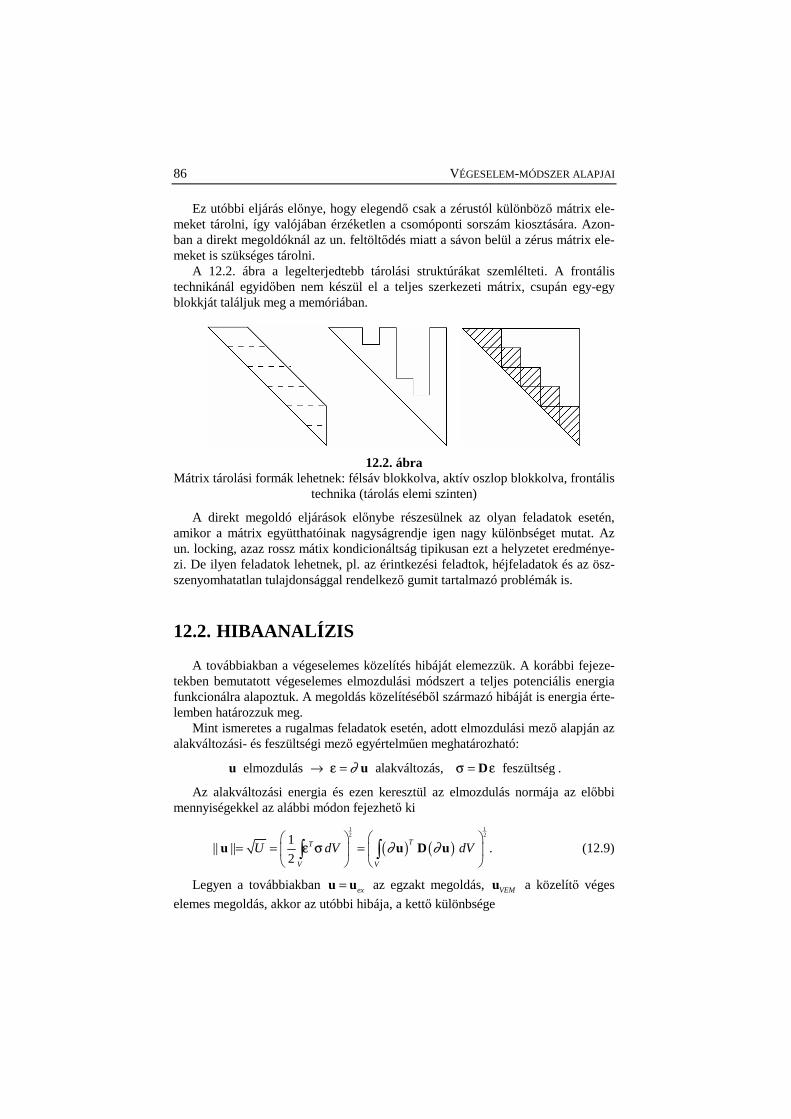
86 VÉGESELEM-MÓDSZER ALAPJAI
Ez utóbbi eljárás előnye, hogy elegendő csak a zérustól különböző mátrix ele-meket tárolni, így valójában érzéketlen a csomóponti sorszám kiosztására. Azon-ban a direkt megoldóknál az un. feltöltődés miatt a sávon belül a zérus mátrix ele-meket is szükséges tárolni.
A 12.2. ábra a legelterjedtebb tárolási struktúrákat szemlélteti. A frontális technikánál egyidőben nem készül el a teljes szerkezeti mátrix, csupán egy-egy blokkját találjuk meg a memóriában.
12.2. ábra Mátrix tárolási formák lehetnek: félsáv blokkolva, aktív oszlop blokkolva, frontális
technika (tárolás elemi szinten)
A direkt megoldó eljárások előnybe részesülnek az olyan feladatok esetén, amikor a mátrix együtthatóinak nagyságrendje igen nagy különbséget mutat. Az un. locking, azaz rossz mátix kondicionáltság tipikusan ezt a helyzetet eredménye-zi. De ilyen feladatok lehetnek, pl. az érintkezési feladtok, héjfeladatok és az ösz-szenyomhatatlan tulajdonsággal rendelkező gumit tartalmazó problémák is.
12.2. HIBAANALÍZIS
A továbbiakban a végeselemes közelítés hibáját elemezzük. A korábbi fejeze-tekben bemutatott végeselemes elmozdulási módszert a teljes potenciális energia funkcionálra alapoztuk. A megoldás közelítéséből származó hibáját is energia érte-lemben határozzuk meg.
Mint ismeretes a rugalmas feladatok esetén, adott elmozdulási mező alapján az alakváltozási- és feszültségi mező egyértelműen meghatározható:
elmozdulás alakváltozás, feszültség→ = =u u Dε σ ε∂ .
Az alakváltozási energia és ezen keresztül az elmozdulás normája az előbbi mennyiségekkel az alábbi módon fejezhető ki
( ) ( )1 12 21
|| ||2
TT
V V
U dV dV
= = = ∫ ∫u u D uε σ ∂ ∂ . (12.9)
Legyen a továbbiakban ex=u u az egzakt megoldás, VEMu a közelítő véges
elemes megoldás, akkor az utóbbi hibája, a kettő különbsége
VÉGESELEM-MÓDSZER ALAPJAI 87
VEM ex= −e u u . (12.10)
Az e hiba pontszerű értelmezése a gyakorlatban ritkán határozható meg, de a
(12.9) energia norma alapján értelmezve
( ) ( )121
|| ||2 V
dV
= ∫e e D e∂ ∂ (12.11)
már léteznek matematikai megalapozottságú becslések. Energia értelemben konvergens a megoldás, ha a hiba normája az ismeretlenek
számának növelésével tart a nullához:
lim || || 0N →∞
=e , (12.12)
ahol N az ismeretlenek száma, térbeli izoparametrikus elemeknél ( )3 NCS⋅ .
Pontonkénti konvergenciáról beszélünk, ha minden pontban teljesül az alábbi határérték
lim 0N →∞
=e . (12.13)
Az ismeretlenek számának növelése alapvetően kétféle módon is megvalósítha-tó. Az egyik esetben az elemháló sűrítésével csökkentjük az elemek jellemző h méretét, változatlan lineáris vagy kvadratikus közelítő mező alkalmazása mellett. A másik esetben változatlan felosztás, azaz változatlan elemméret mellett, a köze-lítő polinomok p rendjét növeljük. A két eljárás ötvözete egyaránt magába foglalja a h méret csökkentését p polinom rendjének növelését. Az alkalmazott módszere-ket tekintve beszélhetünk h -verziójú-, p -verziójú- és hp -verziójú végelemes
eljárásokról. A p -verziónál alkalmazott függvénytér felépíthető Lagrange-féle és Legendre-
féle polinomokkal is. Az utóbbi alkalmazása azért előnyösebb, mert az approximá-ciós tér hierarchikusan egymásba ágyazott. Ekkor a magasabb rendű p polinom alapján előállított merevségi mátrix leválaszthatóan tartalmazza az alacsonyabb rendű közelítések mátrixait is, a lineárissal bezárólag. A Legendre-féle polinomok és deriváltjaik ortogonális tulajdonsággal rendelkeznek, ezért a megoldandó egyenletrendszer kondicója is kedvezőbb mint a Lagrange-féle közelítés esetén.
A peremérték feladatokat az irodalomban három csoportba szokás sorolni: A. típusról beszélünk, ha megoldás elegendően sima, vagyis a vizsgált tar-
tomány szingularitásokat nem tartalmaz, azaz analitikus jellegű. B. típus esetén szingularitásokat tartalmaz a feladat, de ez a szinguláris hely
az elem csomópontjába esik C. típusnál a szingularitások tetszőlegesen helyezkednek el, azaz nem esnek
csomópontokba. A 12.3. ábra példákat mutat be a szinguláris helyekre. Ezek lehetnek, pl. éles
saroknál, koncentrált erő támadási helyén, kompozit anyagok peremein. A szingu-

88 VÉGESELEM-MÓDSZER ALAPJAI
láris pontok a gyakorlatban a tönkremenetel kiindulási helyeiként igen veszélyesek lehetnek.
12.3. ábra Példák a szinguláris pontokra
A szinguláris pont környezetében az elmozdulási mező lefutását a szingularitás jellege határozza meg. A szingularitás lehet erős és gyenge:
( ) 01
ii
i
r r rλϕ∞
=
= <∑u Φ,
ahol 0r az elhalási hossz
1 szigorú ha min
1 nem szigorú iλ<
>.
A szigorú szingularitás esetén a feszültség tart a végtelenbe, ha nem
szigorú akkor véges értékű lesz. Az éles sarok geometriája, azaz nyílásszöge döntő befolyással van a szingularitás jellegére. Ha nyílásszög kisebb mint 120o , akkor a csúcspont veszélyes feszültséggyűjtő hely lehet.
A különböző típusú feladatokra vonatkozóan az irodalomban a következő hi-babecslő formulák találhatók a h-, p-, hp- verziójú közelítésekre.
12.1. táblázat: Hibabecslő összefüggések
A B C
h 2|| ||p
k N −=≤ ⋅e ( )1
2 min ,|| || pk N λ−≤ ⋅e ( )12 min ,|| || pk N λ−≤ ⋅e
p ( )12
|| || exp N kδγ
δ
≤ − ⋅ >
e
|| || k N λ−≤ ⋅e 12|| || k N λ−≤ ⋅e
hp ( )13
|| || exp N kδγ
δ
≤ − ⋅ >
e
A 12.1 táblázatban szereplő N az ismeretlenek számát, p a közelítő polinom fokszámát, λ a szingularitás mértékét jelenti, k konstans érték.
12.4. ábra
A szinguláris pont környezete
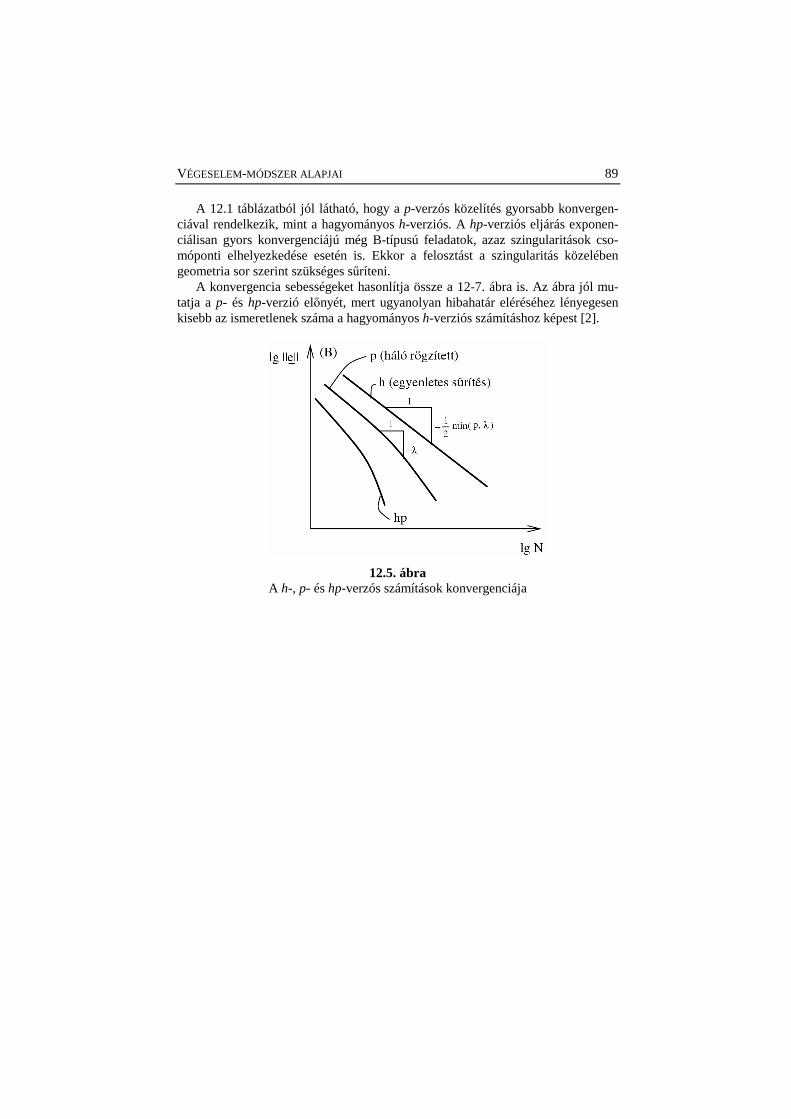
VÉGESELEM-MÓDSZER ALAPJAI 89
A 12.1 táblázatból jól látható, hogy a p-verzós közelítés gyorsabb konvergen-ciával rendelkezik, mint a hagyományos h-verziós. A hp-verziós eljárás exponen-ciálisan gyors konvergenciájú még B-típusú feladatok, azaz szingularitások cso-móponti elhelyezkedése esetén is. Ekkor a felosztást a szingularitás közelében geometria sor szerint szükséges sűríteni.
A konvergencia sebességeket hasonlítja össze a 12-7. ábra is. Az ábra jól mu-tatja a p- és hp-verzió előnyét, mert ugyanolyan hibahatár eléréséhez lényegesen kisebb az ismeretlenek száma a hagyományos h-verziós számításhoz képest [2].
12.5. ábra A h-, p- és hp-verzós számítások konvergenciája
90 VÉGESELEM-MÓDSZER ALAPJAI
13. MODELLEZÉSI KÉRDÉSEK-1
A szerkezetek számításánál számos olyan probléma kerül előtérbe, hogy ho-gyan lehet a megfogásokból származó peremfeltételeket, az elemek közötti túlfe-désből származó hatásokat, a teljes szerkezetnél az ismétlődésből származó perio-dicitást, a ferde hatásvonalú megtámasztásokat stb. kényelmesen kézben tartani, a számítási időt csökkenteni. A felsorolt problémákat érdemes elem szintjén kezelni.
A számítógépes tervezés során általában a teljes szerkezetet nem lehet minden részletre kiterjedően a képernyőn megjeleníteni, ill. gyakran kész szerkezeti ele-mek, részegységek kerülnek beépítésre, amit a modellezésnél fel kell tudni hasz-nálni. Ez szintén újabb megfontolást igényel a végeselemes számítás megszervezé-sére, a modellünk felépítésére [1]. Equation Chapter 13 Section 1
13.1. ALSZERKEZETTECHNIKA
Tételezzük fel, hogy a több szerkezeti egységből álló szerkezet egyes részeinek végeselemes felosztását már előállítottuk. A merevségi mátrixot és a csomóponti redukált terhelési vektort kiszámoltuk. Az egyes részeket bizonyos, a tervező által megálmodott felületek mentén össze kell illeszteni [1].
A 13.1. ábrán lévő egyszerű felépítésű szerkezetet két alszerkezetre ( )1,2i =
bontjuk fel. A mechanikai probléma végeselem-módszerrel történő megoldásánál megkövetelt pontosság elérésére megfelelő számú és fokszámú elemeket haszná-
lunk fel. Az alszerkezetek az icA felületük mentén csatlakoznak egymáshoz. Az itt
található csomóponti elmozdulások vektora icq , míg a megmaradóké, röviden a
belső pontoké ibq . Az alszerkezet összes csomópontjának elmozdulásvektora iq .
A teljes potenciális energia minimuma elv szerint fennáll, hogy
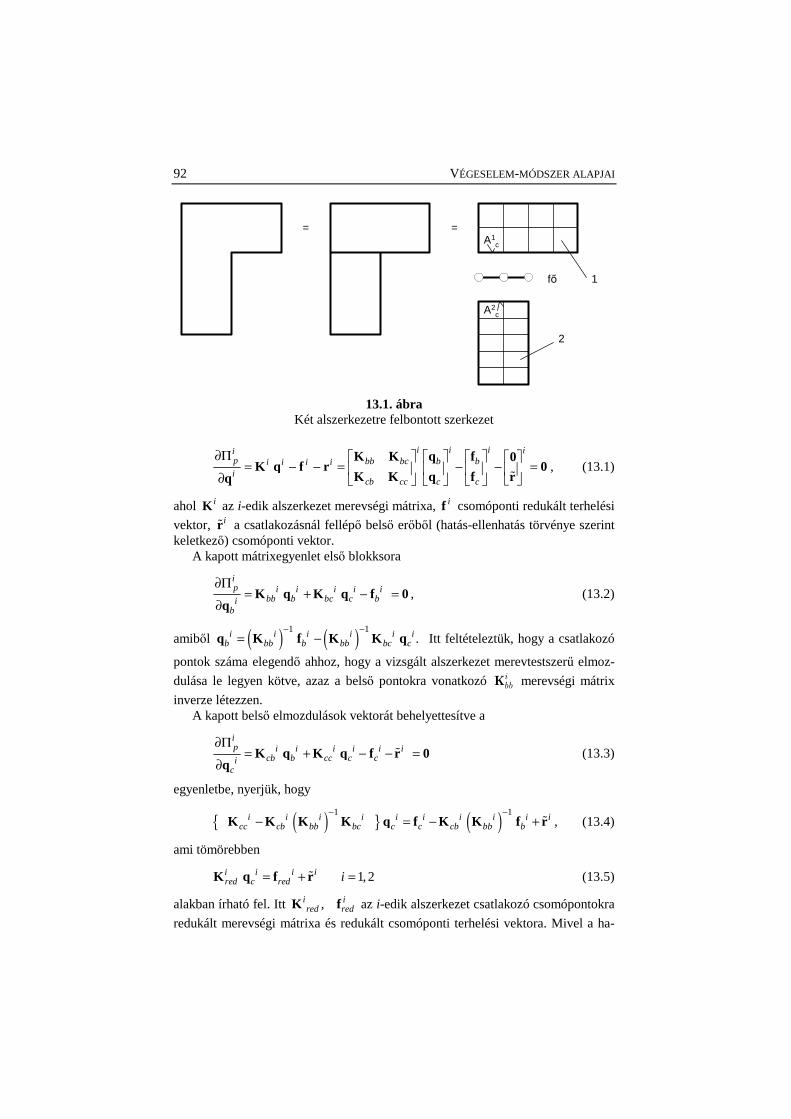
92 VÉGESELEM-MÓDSZER ALAPJAI
A1c
fő
A2c
= =
1
2
13.1. ábra Két alszerkezetre felbontott szerkezet
i i i ii
p bb bc b bi i i ii
cb cc c c
∂Π = − − = − − = ∂
K K q f 0K q f r 0
K K q f rq, (13.1)
ahol iK az i-edik alszerkezet merevségi mátrixa, if csomóponti redukált terhelési
vektor, ir a csatlakozásnál fellépő belső erőből (hatás-ellenhatás törvénye szerint keletkező) csomóponti vektor.
A kapott mátrixegyenlet első blokksora
ip i i i i i
bb b bc c bib
∂Π= + − =
∂K q K q f 0
q, (13.2)
amiből ( ) ( )1 1.i i i i i i
b bb b bb bc c
− −= −q K f K K q Itt feltételeztük, hogy a csatlakozó
pontok száma elegendő ahhoz, hogy a vizsgált alszerkezet merevtestszerű elmoz-
dulása le legyen kötve, azaz a belső pontokra vonatkozó ibbK merevségi mátrix
inverze létezzen. A kapott belső elmozdulások vektorát behelyettesítve a
ip i i i i i i
cb b cc c cic
∂Π= + − − =
∂K q K q f r 0
q (13.3)
egyenletbe, nyerjük, hogy
( ) ( )1 1i i i i i i i i i icc cb bb bc c c cb bb b
− −− = − +K K K K q f K K f r , (13.4)
ami tömörebben
i i i ired c red= +K q f r 1, 2i = (13.5)
alakban írható fel. Itt ,i ired redK f az i-edik alszerkezet csatlakozó csomópontokra
redukált merevségi mátrixa és redukált csomóponti terhelési vektora. Mivel a ha-

VÉGESELEM-MÓDSZER ALAPJAI 93
tás-ellenhatás értelmében 1 2= −r r , továbbá a csatlakozási csomópontokban 1 2
c c c= =q q q .
A csatlakozó pontok egyensúlyát kifejező egyenletek összegzésével a követke-ző végső egyenlethez jutunk a csatlakozó csomóponttokbeli elmozdulás meghatá-rozására:
i ired c red
i i
=
∑ ∑K q f (13.6)
vagyis megkaptuk a főszerkezet egyensúlyi egyenletét. A módszer előnyei: egyszerűbb az adatelőkészítés, a tipizált alkatrészek, szer-
kezeti egységek merevségi mátrixait, terhelési vektorait előre ki lehet számolni, azokat el lehet raktározni és újbóli számításnál a teljes rendszerbe könnyen be le-het illeszteni. Az alrészek számításánál a többprocesszorú, párhuzamos számítás technikáját is fel lehet használni jelentős időt megtakarítva. A sávszélesség mini-malizálása egyszerűbb alszerkezeti szinten, mint a teljes rendszer vonatkozásában. A számítási eredmények birtokában azon részeken, ahol nem kell változtatást vég-
rehajtani, az elraktározott ,i ired redK f mennyiségek újból felhasználhatók, az
újraszámítást csak azon részeken kell végrehajtani, ahol a geometriában, anyagban, esetleg a terhelésben álltak be változások. Ezzel gyorsítani lehet a végső tervek elérését. Az alszerkezetekkel kezelt rendszereknél az I/O műveletek száma csök-ken. Gyakran a számítógépi memória korlátja miatt is előnyös használata, mivel nem kell egyszerre a teljes egyenletrendszert tárolni.
A gyakorlatban, nagybonyolultságú szerkezeteknél többszintű alszerkezeti struktúra felépítése is javasolt.
13.2. ADOTT ELMOZDULÁSOK FIGYELEMBEVÉTELE
Az elmozdulásmódszernél, a teljes potenciális energia minimuma elv használa-takor a kinematikailag lehetséges elmozdulásmezőnek a kinematikai peremfeltételt ki kell elégítenie. Feltételezéseink értelmében az uA felületre kifutó végeselemek
csomópontjainak elmozdulásával a teljes felületen megadott elmozdulás függvényt leírjuk. Így az elem szintjén nagyon egyszerű az adott elmozdulás figyelembevéte-le.
Legyen a teljes potenciális energia
( ) ( ), ,12
2
e e e ess su s se e e e T e T
p p s u e e e eus uu u u
Π = Π = −
K K q fq q q
K K q f (13.7)
ahol euq a eq csomóponti elmozdulásvektor azon része, amelynél az elmozdulások
adottak, míg a esq -el jelöljük, a szabad, ismeretlen elmozdulásokat magában fog-

94 VÉGESELEM-MÓDSZER ALAPJAI
laló vektort. A kijelölt műveletek elvégzésével, a minimalizálás szempontjából állandó tagokat elhanyagolva, a minimalizálandó energia
( ) ( ( ) ),12 ,
2e e e T e e e e e
p p s s ss s s su ue e
Π = Π = − −∑ ∑q q K q f K q (13.8)
vagyis az adott elmozdulás egy kinematikai terhelést jelent, ami arányos az adott
elmozdulással e esu u−K q .
Gyakran a kinematikai hatásokat külön terhelésként kezelik, rugalmas szerke-zetről lévén szó a szuperpozíció elvének felhasználásával jutunk a teljes - a köl-csönhatásból származó erőhatásokból is származó - terhelés figyelembevételéhez. Ebben az esetben az egyenletrendszert megoldó eljárásnak un. több jobboldalas számításra is alkalmasnak kell lennie. Az alapterhelések megoldásainak lineáris kombinációjával juthatunk el a kívánt terhelések összegzett hatásának az elemzé-sére. E technikával gépidő takarítható meg. Ugyanis, a szerkezet méretétől függő-en az alapterhelésekhez tartozó elmozdulások kiszámítása igényel valójában jelen-tős időt. Azok lineáris kombinációja már gyorsan elvégezhető, melyek variációi a tervezési folyamattól függnek, azok bármikor – az elraktározott futási eredmények birtokában megismételhetők, újjakkal tetszés szerint kiegészíthetők.
13.3. ADOTT ELMOZDULÁSMEZŐBEN FENNÁLLÓ SZAKADÁS, KEZDETI HÉZAG FIGYELEMBEVÉTELE
A gépészmérnöki gyakorlatban gyakran az alkatrészek között túlfedéssel való-sítunk meg kötést. Ebben az esetben a kapcsolatot oly módon is tudjuk modellezni, hogy kétoldalú kapcsolatot tételezünk fel, vagyis az alakváltozás után a két test párbaállított pontjai azonos helyet foglalnak el. Ez a modellezésben egy egyszerű-sítés, mert az elemek közötti normális érintkezési feszültség előjelére és a súrlódá-si feltételekre nem vagyunk tekintettel. A geometriai illesztési feltétel kielégítésé-vel a számítás után lehetőség van a feszültségi feltételek ellenőrzésére. Amennyi-ben az érintkezési tartományon nincs semmiféle adhézió, akkor a normál feszült-ség csak nyomó lehet. Száraz súrlódásnál a COULOMB-féle egyenlőtlenségi felté-telnek is fenn kell fennállnia.
Nézzük az egyszerűsített modellünket. Tételezzük fel, hogy az A és az F párbaállított csomópontok általánosított csomóponti elmozdulása között a
F A FA= +q q h (13.9)
kapcsolat áll fenn, ahol FAh a szakadásból (kezdeti hézagból) származó vektor.
Az F pontot főcsomópontnak, az A pontot alcsomópontnak nevezzük. Az összefüggés értelmében alakváltozás után a két pont a tér egy közös P pontjába kerül (13.2. ábra). Itt is feltételezzük, hogy a csatlakozó cA tartományon a hézag
változását, az elmozdulásmezőt a csomóponti értékek egyértelműen leírják.

VÉGESELEM-MÓDSZER ALAPJAI 95
n
hFA
qA
qF
A
F
P
z
x
13.2. ábra
Kétoldali kapcsolat x és z irányában
Az A csomópontot magába foglaló e jelű elem teljes potenciális energiája az A
csomóponthoz eAq és az elem megmaradó pontjaihoz tartozó e
mq csomóponti
elmozdulás vektorokkal írható fel:
( ) ( ), ,1, 2
2
e eA Ae e e e e T e T e
p p A m mA e em m
Π = Π = −
q fq q q q K
q f, (13.10)
illetve
( ),1, 2
2
eF FA Ae T T e T e
p F FA m e em m
− Π = − −
q h fq h q K
q f. (13.11)
A merevségi mátrixot az elmozdulásvektor felbontása szerint négy részre tagol-juk
e
AA Ame
mA mm
=
K KK
K K. (13.12)
Ennek felhasználásával nyerjük, hogy
( ) ,, ,e
AAe e e T e Tp p F m F m FA
mA
Π = Π −
Kq q q q h
K, (13.13)
vagyis az A pontbeli ismeretlenek F pontba való áthelyezésével az e-edik elem merevségi mátrixa nem módosul, a csomóponti terhelésé azonban igen:

96 VÉGESELEM-MÓDSZER ALAPJAI
ee
A AAemód FAe
mAm
= +
f Kf h
Kf (13.14)
Gyakorlatban, számos esetben az al- és főcsomópontok között nem az összes koordináták között van alárendeltség, továbbá az elemnek nem csak egy alcsomópontja van, hanem több. Formálisan, a kapott eredmények ekkor is ér-vényben vannak: A módosított redukált csomóponti terhelési vektornál a merevsé-gi mátrix megfelelő oszlopait kell megszorozni a FAh vektorral.
13.4. EXCENTRIKUS CSATLAKOZÁS
A valóságos háromdimenziós szerkezet szilárdságtani feladatának megoldása-kor gyakran használunk egyváltozós ill. kétváltozós redukált modelleket. Jól is-merjük, hogy egyváltozós feladatként kezeljük a rudakat, kétváltozósként a leme-zeket, héjakat. Rúdszerkezeteknél a rudak középvonalai számos esetben kitérők, nem mindig metszik egymást, azt mondhatjuk excentrikusan illeszkednek egymás-hoz.
A lényeg megértése céljából tekintsük az 13.3. ábrán vázolt esetet. A csomó-
ponti általánosított elmozdulásvektor , , ,ee T
A y AU W ϕ = q . Az A és F pont közöt-
ti kettős vonallal rajzolt szakaszt merevnek testnek tekintjük, azaz a merevtestsze-rű szögelfordulás az A és F pontban azonos.
Bevezetve az A Fx x x= − , A Fz z z= − az A és az F pontok közötti „távol-
ságokat” kapjuk, hogy
1 0ˆ0 1
0 0 1
e
e EXA F
y yA F
U z U
W x W
ϕ ϕ
= = − =
q T q . (13.15)
Az e jelű elemen az A csomóponton kívüli helyeken emq a csomóponti
elmozdulásvektor. Így
ˆe
EXA F Fe EX
e em m m
= = =
q q qT 0q T
q q q0 E (13.16)
és az elem teljes potenciális energiája a főponti és a megmaradó pontokbeli cso-móponti elmozdulásvektoron keresztül
( ) ( ),12
2
eT F Ae T e T EX e EX
p F m e em m
Π = −
q fq q T K T
q f, (13.17)

VÉGESELEM-MÓDSZER ALAPJAI 97
WF
UF
X~
Z~
A
F
z
x
Fy ,ϕ
13.3. ábra Excentrikus csatlakozás síkbeli esetben
amiből a transzformált merevségi mátrix ( )Te EX e EX=K T K T és a redukált terhe-
lési vektor ( )Te EX e=f T f .
Térbeli esetben az A Fy y y= − mennyiség további bevezetésével a merevtest-
szerű elfordulásból
0
0
0
x
y
z
z y
z x
y x
ϕϕ ϕϕ
− ∆ = − = −
u Ω (13.18)
elmozdulás keletkezik. Iymódon
ˆ0
e
e EXA F
x x
y y
z zA F
U U
V V
W Wϕ ϕϕ ϕϕ ϕ
= = =
Eq T q
E
Ω. (13.19)
A teljes transzformáció a (13.16) alattiak értelemszerű alkalmazásával történik. Térbeli esetekre vonatkozóan további információ az [1] irodalomban olvasható.
98 VÉGESELEM-MÓDSZER ALAPJAI
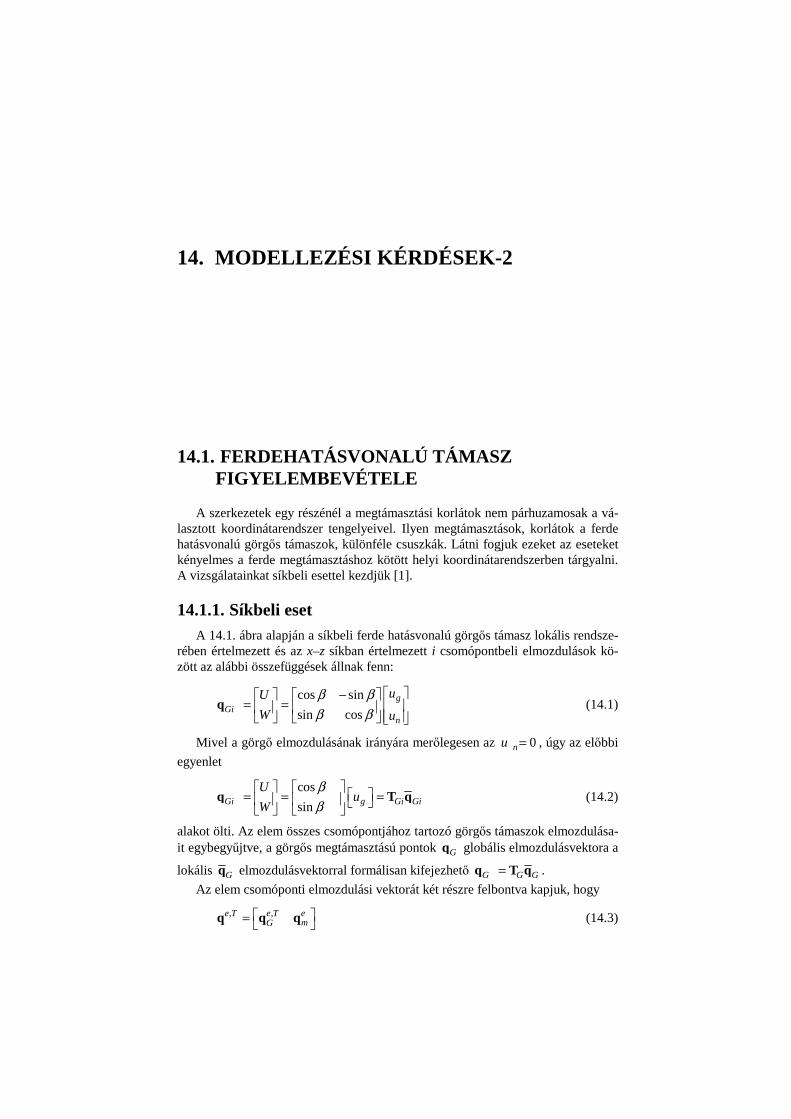
14. MODELLEZÉSI KÉRDÉSEK-2
14.1. FERDEHATÁSVONALÚ TÁMASZ FIGYELEMBEVÉTELE
A szerkezetek egy részénél a megtámasztási korlátok nem párhuzamosak a vá-lasztott koordinátarendszer tengelyeivel. Ilyen megtámasztások, korlátok a ferde hatásvonalú görgős támaszok, különféle csuszkák. Látni fogjuk ezeket az eseteket kényelmes a ferde megtámasztáshoz kötött helyi koordinátarendszerben tárgyalni. A vizsgálatainkat síkbeli esettel kezdjük [1].
14.1.1. Síkbeli eset A 14.1. ábra alapján a síkbeli ferde hatásvonalú görgős támasz lokális rendsze-
rében értelmezett és az x–z síkban értelmezett i csomópontbeli elmozdulások kö-zött az alábbi összefüggések állnak fenn: Equation Chapter 14 Section 1
cos sin
sin cosg
Gin
uU
W u
β ββ β
− = =
q (14.1)
Mivel a görgő elmozdulásának irányára merőlegesen az 0nu = , úgy az előbbi
egyenlet
cos
sinGi g Gi Gi
Uu
W
ββ
= = = q T q (14.2)
alakot ölti. Az elem összes csomópontjához tartozó görgős támaszok elmozdulása-it egybegyűjtve, a görgős megtámasztású pontok Gq globális elmozdulásvektora a
lokális Gq elmozdulásvektorral formálisan kifejezhető G G G=q T q .
Az elem csomóponti elmozdulási vektorát két részre felbontva kapjuk, hogy
, ,e T e T emG
= q q q (14.3)

100 VÉGESELEM-MÓDSZER ALAPJAI
az elem teljes potenciális energiája
( ) ( ), ,1, 2
2
e e e eGG Gm G Ge e e e e T e T
p p G m G m e e e emG mm m m
Π = Π = −
K K q fq q q q
K K q f, (14.4)
n
t
guW
U
znu
β
x
14.1. ábra Síkbeli ferdehatásvonalú görgős támasz
ami a transzformációs összefüggés felhasználásával
( )( ), ,
,
12 ,
2
e e e ep p G m
T e T e e T eG GG G G Gm G G Ge T e T
G m e e e emG G mm m m
Π = Π =
= −
q q
T K T T K q T fq q
K T K q f
(14.5)
vagyis a görgős megtámasztáshoz kötött helyi koordináta-rendszerbeli elmozdulás-ra áttérve, az elem merevségi mátrixának és redukált terhelési vektorának az át-transzformálására van szükség. Látjuk, hogy egy görgőnél a helyi rendszerben az ismeretlenek száma eggyel csökkent, csak az gu szerepel.
14.1.2. Térbeli eset Ebben az esetben a megtámasztás olyan, hogy a csomópont egy adott, ferdén
elhelyezkedő síkban tud elmozdulni, pl. gömbön keresztül csatlakozik a ferde sík-kal. A szóban forgó síkban az elmozdulást, tetszőlegesen felvett, két egymásra merőleges xe és ye irányú elmozduláson keresztül fogjuk szemlélni, jelölje ezeket
u és v . A ferde sík normálisa ze jobb sodrású koordinátarendszert alkot az xe és
ye irányokkal. Ortogonális transzformáció révén a globális x,y,z koordinátarend-
szerbeli elmozdulás
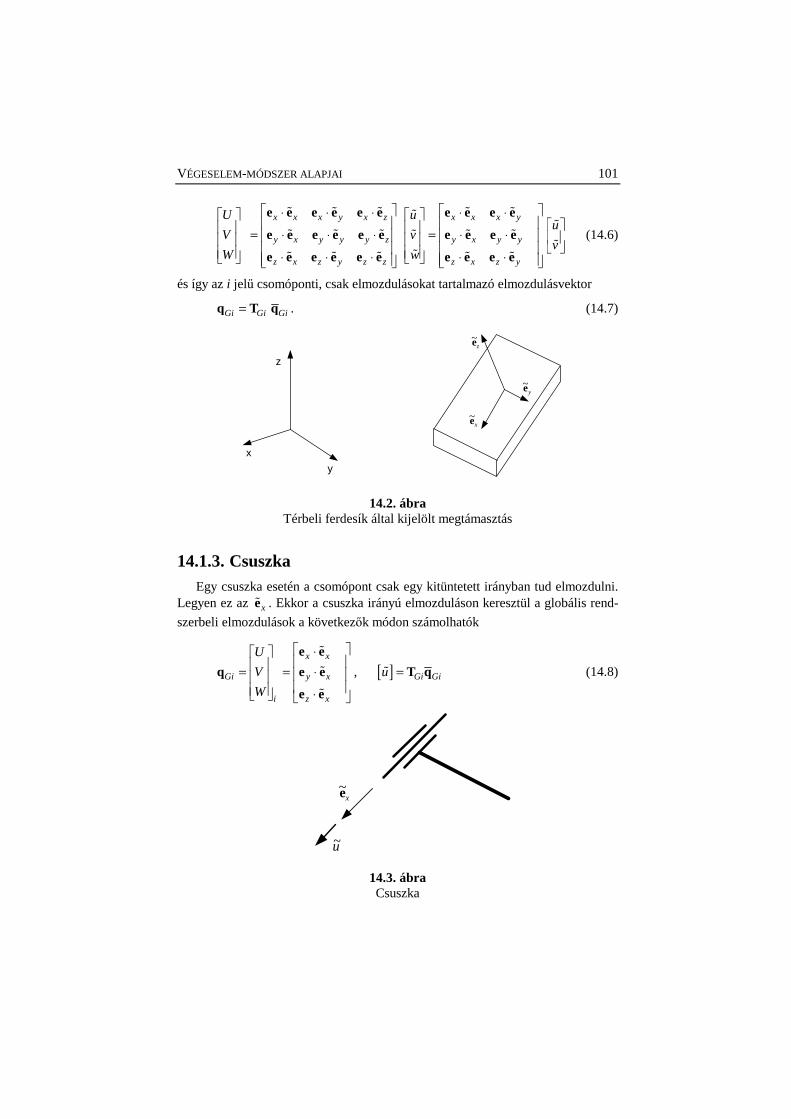
VÉGESELEM-MÓDSZER ALAPJAI 101
x x x y x z x x x y
y x y y y z y x y y
z x z y z z z x z y
U uu
V vv
W w
⋅ ⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
e e e e e e e e e e
e e e e e e e e e e
e e e e e e e e e e
(14.6)
és így az i jelű csomóponti, csak elmozdulásokat tartalmazó elmozdulásvektor
Gi Gi Gi=q T q . (14.7)
z
x
y
xe~
ze~
ye~
14.2. ábra Térbeli ferdesík által kijelölt megtámasztás
14.1.3. Csuszka Egy csuszka esetén a csomópont csak egy kitüntetett irányban tud elmozdulni.
Legyen ez az xe . Ekkor a csuszka irányú elmozduláson keresztül a globális rend-
szerbeli elmozdulások a következők módon számolhatók
[ ],x x
Gi y x Gi Gi
z xi
U
V u
W
⋅ = = ⋅ = ⋅
e e
q e e T q
e e
(14.8)
xe~
u~
14.3. ábra Csuszka
102 VÉGESELEM-MÓDSZER ALAPJAI
14.2. PERIÓDIKUS SZERKEZET
A gépészet, építészet szerkezetei gyakran rendelkeznek szimmetria tulajdonsá-gokkal, vagy ismétlődő részekkel, azonos terhelés és peremfeltételek mellett. A szimmetria és az ismétlődésből származó periodicitás figyelembevétele a számítási igények lényeges csökkenéséhez vezet, mivel a teljes szerkezet viselkedését egy kisebb rész vizsgálatával is tisztázni lehet. Ehhez az adatelőkészítés kevesebb munkája is pozitívan járul hozzá.
A szerkezet geometriájából, anyagából, terheléséből és megfogásából származó szimmetria miatt, a szimmetria felületein, vonalain, bizonyos kinematikai mennyi-ségek zérus értékkel rendelkeznek.
Példaként szolgáljon egy olyan téglalap alakú lemez, amely mind a négy olda-lán befalazott. A terhelés egyenletes nyomás a lemez teljes felületén. Az egyes oldalak mentén megfelezve a lemezt, a negyedrészének vizsgálatával célhoz érünk, ha a középvonalak mentén a vonalirányú szögelfordulást zérusra állítjuk be, azaz ez lesz a kinematikai peremfeltétel.
Egy másik gyakori példa a forgó alkatrészek, szerkezeti elemek-hengerkoordináta-rendszerbeli vizsgálata. Ekkor ebben a rendszerben a szerkezet periodicitással rendelkezhet. Pl. egy szivattyú járókereke. A lapátok közötti rész ismétlődik. Egy felvett R sugáron a lapátokat F és A pontban metsszük el. Ehhez a pontokhoz rendre a Fϕ és Aϕ hengerkoordinátarendszerbeli szögek tartoznak. E
szögekkel kijelölt helyi koordinátarendszerben a radiális és tangenciális elmozdu-lások páronként azonosak, azaz F Au u= és F Av v= .
Emiatt a periodicitási peremet (felületet) tartalmazó végeselemeknél azon cso-mópontokban, amelyek ezeken a peremeken helyezkednek el, az x y− rendszer-ből át kell transzformálni a mennyiségeket a helyi koordinátarendszerekbe, továb-bá az F, A pontpár ismeretlenjeit egybe kell ejteni, majd ennek figyelembevételé-vel kell az elemek illesztését elvégezni a végső egyenletrendszer előállítása céljá-ból. Itt is az A pontot tartalmazó elemen kell végrehajtani az alárendelést, hasonló-an, mint az excentrikus csatlakozásnál is tettük. Jelen esetben az A és F pontok sorszámainak nagyobb távolsága miatt a végső egyenletrendszer sávszélessége nő, de az ismeretlenszám lényeges csökkenése e negatívumot kompenzálja.
14.3. RUGALMAS ÁGYAZÁS
Amint már a síkbeli tartóknál is említettük, egyszerűsített modellezésnél a vizsgált test megtámasztását biztosító rugalmas testet, Winkler típusú közeggel
helyettesítik. A nagymerevségű rúgóállandóval ( 610c ≈ ), a rugóirányú elmozdulás zérus értékét jól be lehet állítani. A rugalmas megtámasztási felületen elhelyezkedő
, ,x y z tengelyirányú rugóállandókat jelölje , , ,x y zc c c a keletkező felületi terhelést
[ ], ,T
x y zc c c u v w= =p C u , (14.9)

VÉGESELEM-MÓDSZER ALAPJAI 103
ahol diagonál mátrixot jelöl. Az e jelű elemmel az erugA felület mentén csatla-
kozó rugalmas támaszban felhalmozott alakváltozási energia
1 1
2 2e erug rug
e T Trug
A A
U dA dA= =∫ ∫p u u C u , (14.10)
ami az elemenbelüli elmozdulás szokásos közelítése révén ( ) ( )e e ex x=u N q az
, ,1 1
2 2erug
e e T T e e T e erug rug
A
U dA= =∫q N C N q q K q (14.11)
végső alakot nyeri. Ezzel a rugalmas közeggel kapcsolódó végeselem teljes potenciális energiája
( )e e ep p rugvégeselem UΠ = Π + (14.12)
alakban számítható.
14.4. EGYOLDALÚ SÚRLÓDÁS NÉLKÜLI ÉRINTKEZÉS VIZSGÁLATA
A 13.3. részben kétoldalú kapcsolatokkal foglalkoztunk. Ott a feszültségekre nem tettünk előjel korlátokat. A valóságban azonban, adhézió hiányában, az érint-kezési tartományon a normál feszültség csak nyomó feszültség lehet. E miatt az érinkezési feladatok nem lineárisak, mivel az érintkezés/elválás feltételei egyenlőt-lenséget hordoznak. A normál feszültség negatívját p nyomással jelöljük a továb-biakban. Az alakváltozás után
2 1 0N Nd u u h= − + ≥ (14.13)
rés alakul ki, itt eNu a normálirányú elmozdulás, h a kezdeti hézag.
Érintkezés lép fel az cA tartomány K altartományán, ha fennállnak
0, 0d p K= ≥ ∈r (14.14)
és rés van jelen az R altartományon, ha
0, 0d p R≥ = ∈r . (14.15)
A fentiekből következik, hogy
0 cp d A= ∈r . (14.16)
A megoldás egy lehetséges útja az un. büntetőparaméteres technika alkalmazá-sa. Ennek értelmében a minimalizálandó funkcionál

104 VÉGESELEM-MÓDSZER ALAPJAI
( ) ( ) ( )21, 0
2p c
K
B c d dA ahol d A− −= Π + ≤ ∈∫u u r . (14.17)
A1c
A2c
u2
u1
h
1. test
2. test
n 1
Q1
Q2
1Nu
2Nu
n2
nc
14.4. ábra
Az érintkezési normális cn , eNu normálirányú elmozdulások
Képezve B első variációját, nyerjük, hogy az érintkezési nyomás p cd−= −
összefüggéssel számolható. A 3 410 10c E E= ⋅ ⋅∼ nagyságú büntetőparaméter-rel általában a mérnöki gyakorlat pontossági igényeit kielégítő megoldást kapunk.
A büntetőparaméteres technikát úgy is lehet értelmezni, hogy az érintkező tes-tek közzé Winkler típusú normális irányú rugalmas közeget (röviden rúgót) he-lyezzünk el. A feladat megoldását nehezíti, hogy előre nem ismertek az érintkezési ill. az elválási altartományok. Ott, ahol az iterációs számítás valamelyik lépése nem ad nyomást, ott a rúgót ki kell venni, és újabb próbálkozással kell megoldani az egyenletrendszert.
Diszkretizálás után
, , 2, 1, 2, 1,1 12 2
TiT i i i T i T T T T T T
i
B = + − + − + ∑ q K q - q f q q h C q q h (14.18)
ahol C a rúgókból származó rúgómátrix, h a kezdeti hézagból származó vektor. A minimum feltételből nyert mátrix egyenletrendszer
( )1 1 2 11
B∂ = + − − − =∂
K C q Cq f Ch 0q
(14.19)
( )1 2 2 22
B∂ = − + + − + =∂
Cq K C q f Ch 0q
. (14.20)
Ennek megoldását a KALKER- féle iterációs algoritmussal kaphatjuk meg [1].
A feladat diszkretizálásával az érintkezés-elválás feltételét diszkrét pontokban ellenőrizzük le. A diszkrét ponthalmazt a K érintkezési és az R rés ponthalmazra bontjuk fel. Az I K∈ halmazon a Ip nyomás pozitív (rúgóerő negatív) kell le-
gyen, míg az I R∈ réstartomány halmazán 0Ip = .
VÉGESELEM-MÓDSZER ALAPJAI 105
Az iteráció lépései az alábbiak: 1. Rúgó beépítése az cA tartomány azon I pontjaiba, ahol a Ih a legki-
sebb. Ezáltal a C felépítést nyert. 2. A (14.19), (14.20) egyenletrendszer megoldása, a kapott eredmény érté-
kelése. • Ha a nyomás negatív (a rúgóerő pozitív), a rúgót ki kell venni és
az I pontot az R halmazba át kell tenni. • Ha a nyomás pozitív (a rúgóerő negatív), akkor a I pont a K
halmaz pontja marad a továbbiakban is. • Ha a fenti ellenőrzéssel az I és R halmazok változnak, azaz a
C újabb értékű lett, vissza 2 elejére. 3. A J R∈ halmaz ellenőrzése, ténylegesen rés van- e a J pontban.
• Ha az R halmaz összes pontjában 0Jd ≥ , akkor a megoldás
helyes, a számítás befejezett. • Ha az R halmazban találunk olyan pontot, ahol a Jd negatív,
akkor ezen pontot át kell helyezni a K halmazba és vissza kell lépni a 2. –re.
Az elmondottak értelmében a 2. alatti iterációt mindaddig folytatjuk, míg a pil-lanatnyi K érintkezési tartomány pontjaiban mindenütt a Ip nyomás pozitív nem
lesz. Az ehhez kapcsolódó iterációk számát iITERP -vel jelöljük.
Az algoritmus 3. pontjából csak akkor térünk vissza a 2. pontra, amikor a 2. alatt kiszámolt nyomás megoszlás olyan elmozdulást hozott létre, amelynél a testek egymásba hatoltak, ami fizikai képtelenség, azaz a 0Jd ≥ pozitivitását nem sike-
rült biztosítani. Az elvégzett iterációk számát jelölje ITERD . Összességében az algebrai egyenletrendszert a C változása miatt, újabb és
újabb együtthatómátrix-al kell megoldani. A (14.19), (14.20) alatti egyenletrend-
szer megoldásainak össz száma: 1
ITERD
ii
ITERP=∑ .
A számábrázolás véges értéke miatt, a 50 10Id ε −≤ ≈ egyenlőtlenséget kielégí-
tő pontokat a K tartomány pontjának tekintjük. (a rúgó összenyomódása miatt az
érintkezési helyeken d − negatív). A 0Id ε> pontot a rés tartomány pontjának kell
tekinteni. A fenti algoritmus minden esetben konvergens. Folytonos rugalmas Winkler tipusú közeggel felépített kontakt elemeknél az
érintkezés-elválás feltételét az numerikus integrálás Gauss vagy Lobatto-féle pont-jaiban ellenőrizzük le [1].
További variációs elvek (Lagrange-féle multiplikátoros technika, a büntetőparaméters és a Lagrange-féle multiplikátoros technika kombinálása), kü-lönféle megoldási eljárások, optimalizációs érintkezési feladatok, súrlódásos érint-kezési feladat felállítása, megoldása után érdeklődők az [1]-ben találnak bővebb ismereteket.

15. AZ I-DEAS PROGRAMRENDSZER
Az I-DEAS tervező rendszer különböző alkalmazások együttese, melyeket a tervezési folyamat különböző fázisainak megkönnyítésére alkalmazhatunk. Minden egyes gépészeti feladat elvégzése, más-más szoftverrész választását kívánja. A program elindítása után több ablakot nyit meg, melyek közül a jobb szélsőben ta-lálhatjuk meg a különböző alkalmazások kiválasztását engedélyező listaablakot. Ezek a Design, Simulation, Test, Manufacturing, stb. a különböző alkal-mazások ilyen feladatok elvégzésére szolgálnak, mint
• Design: ebben a szoftverrészben alkatrészek geometriai modelljének létre-hozása, módosítása lehetséges.
• Simulation: Az I-DEAS végeselemes modulja, olyan feladatok végrehaj-tása lehetséges, mint a peremfeltételek előírása, végeselemes háló létreho-zása, végeselemes számítások eredményeinek elemzése, stb.
• Test: Az időkezelés eszközeit tömöríti ez az alkalmazásrész. • Manufacturing: A gyártással kapcsolatos szimulációs programrész. Jelen fejezetben elsősorban az I-DEAS programrendszer Simulation modul-
jának használatát tekintjük át, de röviden a program működtetéséhez szükséges funkciókat, jellemzőket is megvizsgáljuk [5].
15.1. ÁLTALÁNOS JELLEMZŐK:
1. Parametrikus modellezés. A tervezés során először egy vázlatot kell készíte-ni, mely nagy vonalakban hasonlít majd az elkészítendő darabhoz, és a méreteket ezután kell pontosan beállítani a kívánalmaknak megfelelően. De természetesen a geometriai elemek pontos koordináták segítéségével is megrajzolhatóak.
2. Tulajdonság alapú modellezés. A bázis alak létrehozása után egyszerűen le-het definiálni kivágást, furatot, beszúrást, stb.
3. Párhuzamos alkatrészfejlesztés. Az alkatrészek közös könyvtárakban he-lyezhetőek el, melyek a megfelelő tervezők által elérhetők módosíthatók.
Az I-DEAS elindítható a parancssorból, menüből vagy ikonnal. Előfordulhat, hogy a program használata speciális account-ot is igényel. A szoftver használatá-
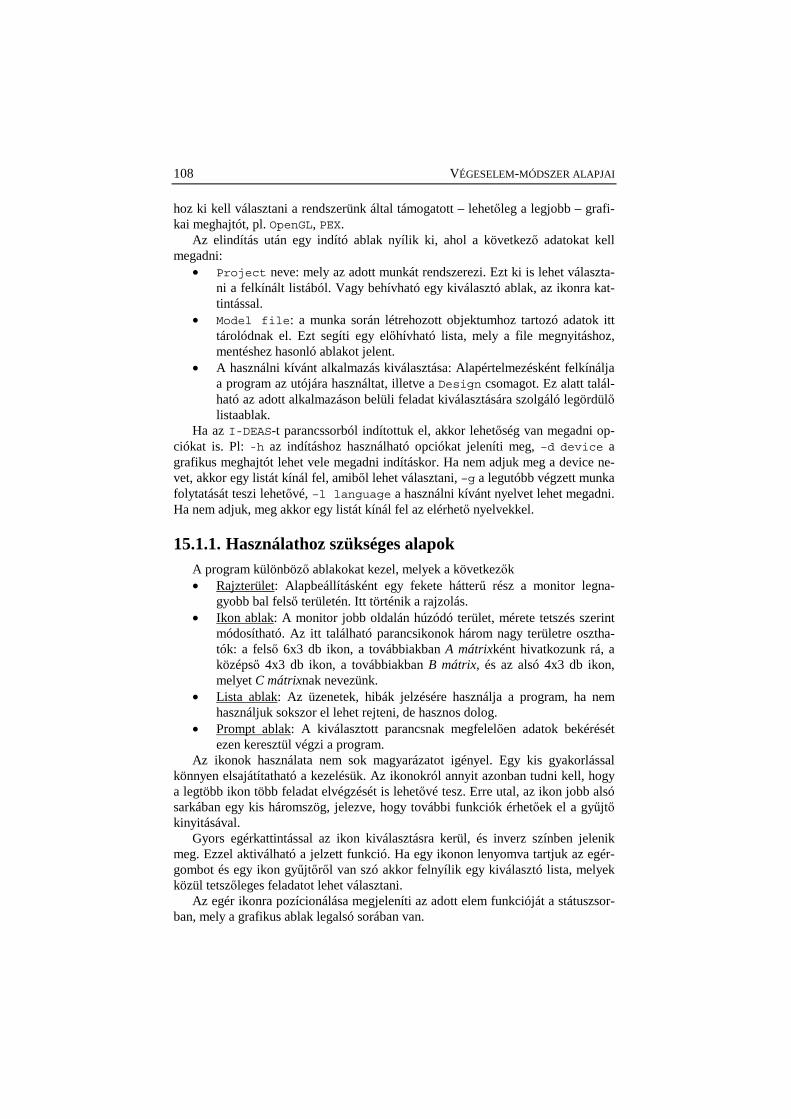
108 VÉGESELEM-MÓDSZER ALAPJAI
hoz ki kell választani a rendszerünk által támogatott – lehetőleg a legjobb – grafi-kai meghajtót, pl. OpenGL, PEX.
Az elindítás után egy indító ablak nyílik ki, ahol a következő adatokat kell megadni:
• Project neve: mely az adott munkát rendszerezi. Ezt ki is lehet választa-ni a felkínált listából. Vagy behívható egy kiválasztó ablak, az ikonra kat-tintással.
• Model file: a munka során létrehozott objektumhoz tartozó adatok itt tárolódnak el. Ezt segíti egy előhívható lista, mely a file megnyitáshoz, mentéshez hasonló ablakot jelent.
• A használni kívánt alkalmazás kiválasztása: Alapértelmezésként felkínálja a program az utójára használtat, illetve a Design csomagot. Ez alatt talál-ható az adott alkalmazáson belüli feladat kiválasztására szolgáló legördülő listaablak.
Ha az I-DEAS-t parancssorból indítottuk el, akkor lehetőség van megadni op-ciókat is. Pl: -h az indításhoz használható opciókat jeleníti meg, –d device a grafikus meghajtót lehet vele megadni indításkor. Ha nem adjuk meg a device ne-vet, akkor egy listát kínál fel, amiből lehet választani, –g a legutóbb végzett munka folytatását teszi lehetővé, –l language a használni kívánt nyelvet lehet megadni. Ha nem adjuk, meg akkor egy listát kínál fel az elérhető nyelvekkel.
15.1.1. Használathoz szükséges alapok A program különböző ablakokat kezel, melyek a következők • Rajzterület: Alapbeállításként egy fekete hátterű rész a monitor legna-
gyobb bal felső területén. Itt történik a rajzolás. • Ikon ablak: A monitor jobb oldalán húzódó terület, mérete tetszés szerint
módosítható. Az itt található parancsikonok három nagy területre osztha-tók: a felső 6x3 db ikon, a továbbiakban A mátrixként hivatkozunk rá, a középső 4x3 db ikon, a továbbiakban B mátrix, és az alsó 4x3 db ikon, melyet C mátrixnak nevezünk.
• Lista ablak: Az üzenetek, hibák jelzésére használja a program, ha nem használjuk sokszor el lehet rejteni, de hasznos dolog.
• Prompt ablak: A kiválasztott parancsnak megfelelően adatok bekérését ezen keresztül végzi a program.
Az ikonok használata nem sok magyarázatot igényel. Egy kis gyakorlással könnyen elsajátítatható a kezelésük. Az ikonokról annyit azonban tudni kell, hogy a legtöbb ikon több feladat elvégzését is lehetővé tesz. Erre utal, az ikon jobb alsó sarkában egy kis háromszög, jelezve, hogy további funkciók érhetőek el a gyűjtő kinyitásával.
Gyors egérkattintással az ikon kiválasztásra kerül, és inverz színben jelenik meg. Ezzel aktiválható a jelzett funkció. Ha egy ikonon lenyomva tartjuk az egér-gombot és egy ikon gyűjtőről van szó akkor felnyílik egy kiválasztó lista, melyek közül tetszőleges feladatot lehet választani.
Az egér ikonra pozícionálása megjeleníti az adott elem funkcióját a státuszsor-ban, mely a grafikus ablak legalsó sorában van.

VÉGESELEM-MÓDSZER ALAPJAI 109
Fontos: Mikor az ikonokat, menüket használjuk érdemes figyelni az üzenete-ket, a tájékoztató ablakban, melyet a rajzterület státuszsorában találunk.
A program használatához három gombos egér használata az ideális, ahogy ez egy korszerű tervező szoftvertől elvárható. Minden gombnak saját funkciója van. A Bal gomb feladata a parancskiválasztás, a geometriai alakzatok kiválasztása a rajzterületen. A Shift gombbal együtt használva csoportos kijelölést tesz lehető-vé. (ez pl. törlésnél, méretezésnél hasznos). A Középső gomb ez az Enter vagy a Return billentyűt helyettesíti, azaz a parancsok lezárására szolgál. Tehát a prog-ram használatát gyorsítja. A Jobb gomb egy Popup menüt jelenít meg, ha a rajzte-rületen használjuk, feladattól függően más-más parancsok aktivizálást gyorsítja.
Számtalan billentyűkombináció előre definiált az I-DEAS-ban, melyek felsoro-lása itt túl hosszú lenne. Most csak az F1 - F12 billentyűket tekintjük. Ezek szere-pe átdefiniálható (lásd az ideas.ini állományt), de alapértelmezésben a követ-kező feladatokat gyorsítják:
• F1 - F5: eltolás, nagyítás, forgatás, kívánt nézet, reset • F6: az előző 5 funkcióbillentyű szerepét határozza meg a feladatbank kivá-
lasztással, melyet a program jelez a rajzterület jobb alsó sarkánál feltünte-tett ikonokkal, háromféle parancsbank definiált.
• F7: teljes méretűre állítja a létrehozott rajzot(AU vagy Ctrl-A, ZM: ablak-kal nagyít)
• F8: egymáshoz közel fekvő rajzelemek közötti választást segíti (Reconsider)
• F9: rajzelemek kijelölését megszünteti (Deselect All) • F10: Munkasíkba állítja a rajzot. • F11: Egy dialógus ablakot nyit („Filter”), mely a rajzelemek gyors kivá-
lasztását segíti. • F12: a rajzterület újrarajzolása (Redisplay Ctrl-R) Az F1-F3 funkcióbillentyűk által definiált művelet elvégzését a kívánt billentyű
nyomva tartásával és az egér mozgatásával érhetjük el. A Menü elérése a Ctrl-M kombinációval történik, mely ki/be kapcsolja a me-
nü megjelenítését. Kilépés: a parancssorba írt exit utasítással, vagy a menüből kiválasztva, vagy a Ctrl-E billentyűkombinációval.
15.1.2. Rajzolást könnyítő funkciók Dynamic Navigator – Dinamikus navigátor, mely az alkatrészrajz készítése so-
rán nyújt támogatást. A már létező rajzelemekhez viszonyított tulajdonságokat jelzi a program a 17.1. táblázatban felsorolt jelzésekkel.
Rajzolás közben az egér jobb billentyűje segítségével további funkciókat akti-vizálhatunk, pl. az Align, vagy a Focus parancsokat, melyek egy-egy korábban létrehozott görbéhez való kapcsolást tesznek lehetővé.
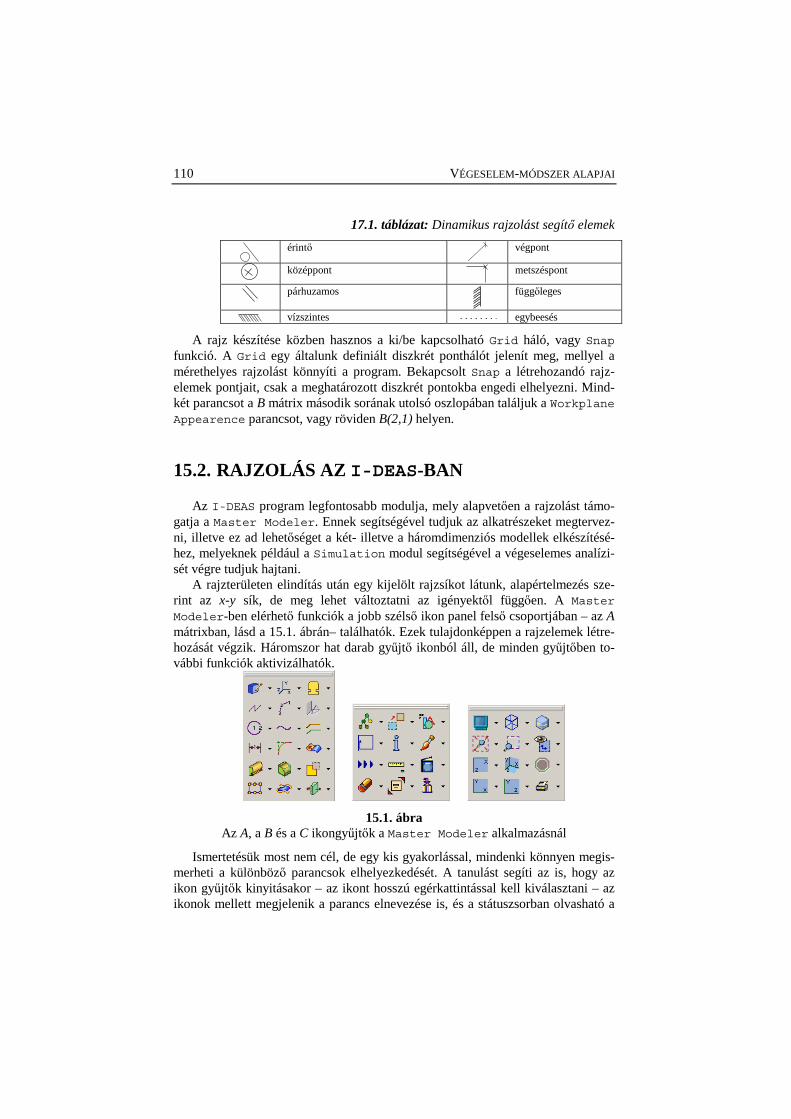
110 VÉGESELEM-MÓDSZER ALAPJAI
17.1. táblázat: Dinamikus rajzolást segítő elemek
érintő
végpont
középpont
metszéspont
párhuzamos
függőleges
vízszintes egybeesés
A rajz készítése közben hasznos a ki/be kapcsolható Grid háló, vagy Snap funkció. A Grid egy általunk definiált diszkrét ponthálót jelenít meg, mellyel a mérethelyes rajzolást könnyíti a program. Bekapcsolt Snap a létrehozandó rajz-elemek pontjait, csak a meghatározott diszkrét pontokba engedi elhelyezni. Mind-két parancsot a B mátrix második sorának utolsó oszlopában találjuk a Workplane Appearence parancsot, vagy röviden B(2,1) helyen.
15.2. RAJZOLÁS AZ I-DEAS-BAN
Az I-DEAS program legfontosabb modulja, mely alapvetően a rajzolást támo-gatja a Master Modeler. Ennek segítségével tudjuk az alkatrészeket megtervez-ni, illetve ez ad lehetőséget a két- illetve a háromdimenziós modellek elkészítésé-hez, melyeknek például a Simulation modul segítségével a végeselemes analízi-sét végre tudjuk hajtani.
A rajzterületen elindítás után egy kijelölt rajzsíkot látunk, alapértelmezés sze-rint az x-y sík, de meg lehet változtatni az igényektől függően. A Master Modeler-ben elérhető funkciók a jobb szélső ikon panel felső csoportjában – az A mátrixban, lásd a 15.1. ábrán– találhatók. Ezek tulajdonképpen a rajzelemek létre-hozását végzik. Háromszor hat darab gyűjtő ikonból áll, de minden gyűjtőben to-vábbi funkciók aktivizálhatók.
15.1. ábra Az A, a B és a C ikongyűjtők a Master Modeler alkalmazásnál
Ismertetésük most nem cél, de egy kis gyakorlással, mindenki könnyen megis-merheti a különböző parancsok elhelyezkedését. A tanulást segíti az is, hogy az ikon gyűjtők kinyitásakor – az ikont hosszú egérkattintással kell kiválasztani – az ikonok mellett megjelenik a parancs elnevezése is, és a státuszsorban olvasható a
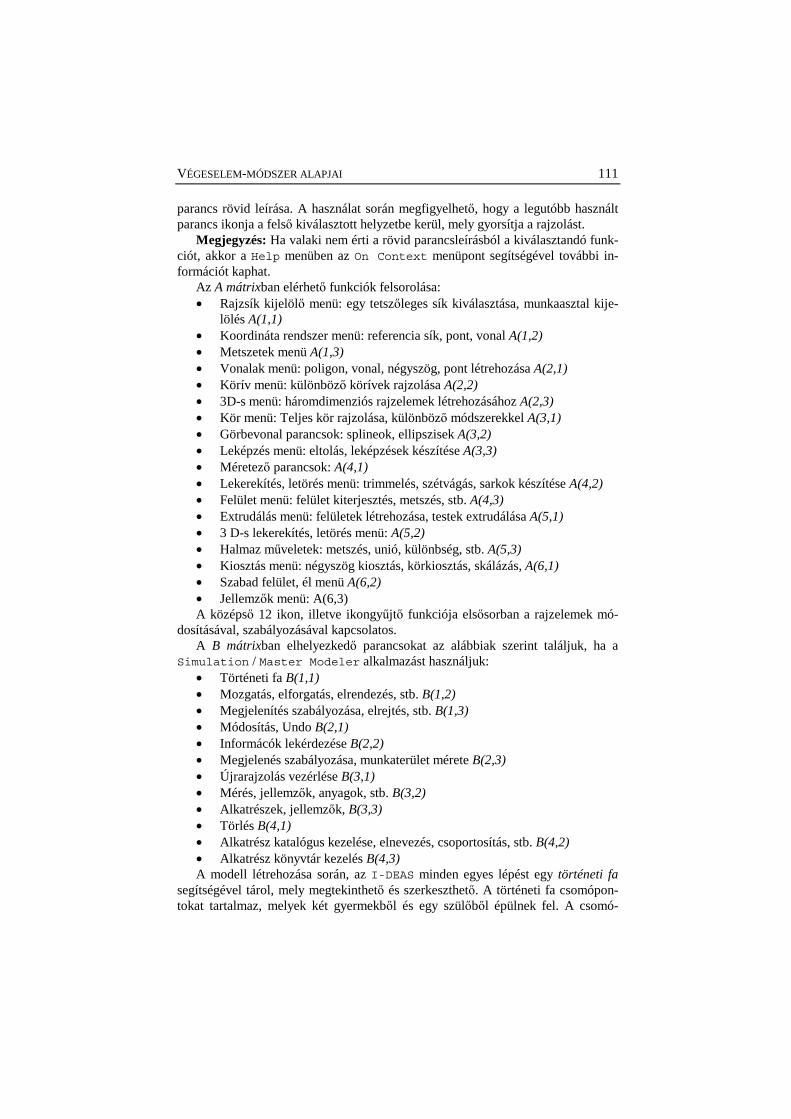
VÉGESELEM-MÓDSZER ALAPJAI 111
parancs rövid leírása. A használat során megfigyelhető, hogy a legutóbb használt parancs ikonja a felső kiválasztott helyzetbe kerül, mely gyorsítja a rajzolást.
Megjegyzés: Ha valaki nem érti a rövid parancsleírásból a kiválasztandó funk-ciót, akkor a Help menüben az On Context menüpont segítségével további in-formációt kaphat.
Az A mátrixban elérhető funkciók felsorolása: • Rajzsík kijelölő menü: egy tetszőleges sík kiválasztása, munkaasztal kije-
lölés A(1,1) • Koordináta rendszer menü: referencia sík, pont, vonal A(1,2) • Metszetek menü A(1,3) • Vonalak menü: poligon, vonal, négyszög, pont létrehozása A(2,1) • Körív menü: különböző körívek rajzolása A(2,2) • 3D-s menü: háromdimenziós rajzelemek létrehozásához A(2,3) • Kör menü: Teljes kör rajzolása, különböző módszerekkel A(3,1) • Görbevonal parancsok: splineok, ellipszisek A(3,2) • Leképzés menü: eltolás, leképzések készítése A(3,3) • Méretező parancsok: A(4,1) • Lekerekítés, letörés menü: trimmelés, szétvágás, sarkok készítése A(4,2) • Felület menü: felület kiterjesztés, metszés, stb. A(4,3) • Extrudálás menü: felületek létrehozása, testek extrudálása A(5,1) • 3 D-s lekerekítés, letörés menü: A(5,2) • Halmaz műveletek: metszés, unió, különbség, stb. A(5,3) • Kiosztás menü: négyszög kiosztás, körkiosztás, skálázás, A(6,1) • Szabad felület, él menü A(6,2) • Jellemzők menü: A(6,3) A középső 12 ikon, illetve ikongyűjtő funkciója elsősorban a rajzelemek mó-
dosításával, szabályozásával kapcsolatos. A B mátrixban elhelyezkedő parancsokat az alábbiak szerint találjuk, ha a
Simulation / Master Modeler alkalmazást használjuk: • Történeti fa B(1,1) • Mozgatás, elforgatás, elrendezés, stb. B(1,2) • Megjelenítés szabályozása, elrejtés, stb. B(1,3) • Módosítás, Undo B(2,1) • Informácók lekérdezése B(2,2) • Megjelenés szabályozása, munkaterület mérete B(2,3) • Újrarajzolás vezérlése B(3,1) • Mérés, jellemzők, anyagok, stb. B(3,2) • Alkatrészek, jellemzők, B(3,3) • Törlés B(4,1) • Alkatrész katalógus kezelése, elnevezés, csoportosítás, stb. B(4,2) • Alkatrész könyvtár kezelés B(4,3) A modell létrehozása során, az I-DEAS minden egyes lépést egy történeti fa
segítségével tárol, mely megtekinthető és szerkeszthető. A történeti fa csomópon-tokat tartalmaz, melyek két gyermekből és egy szülőből épülnek fel. A csomó-
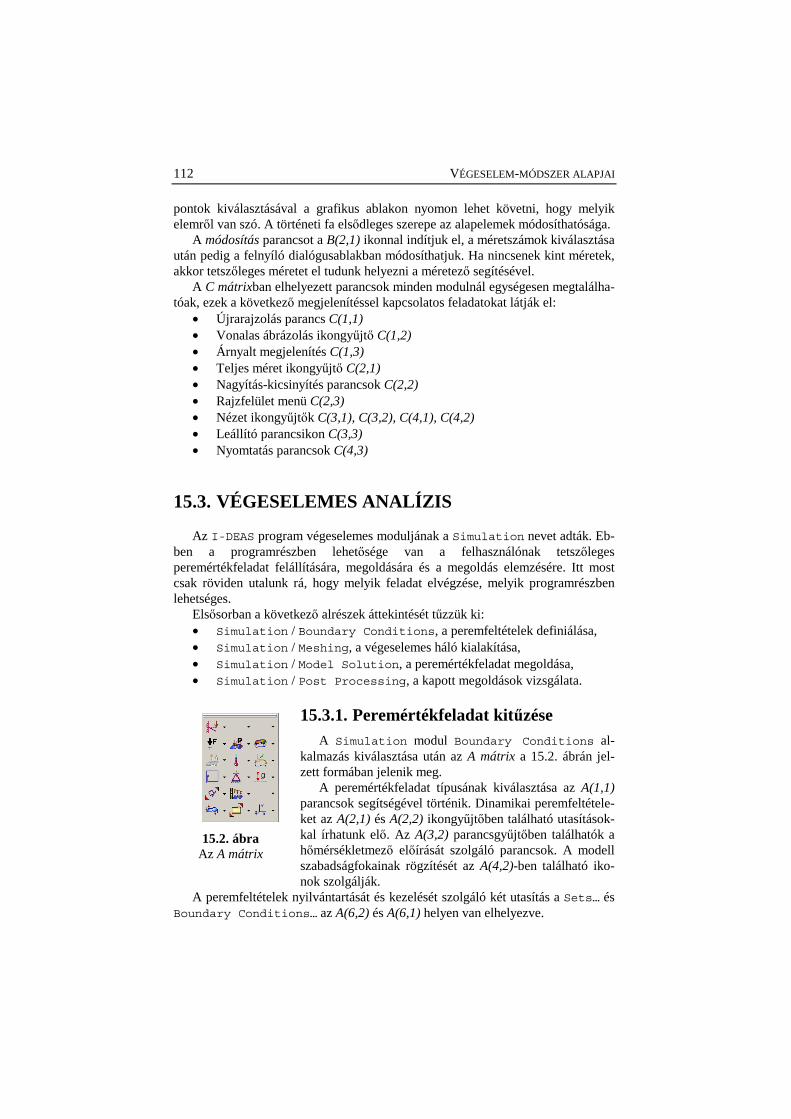
112 VÉGESELEM-MÓDSZER ALAPJAI
pontok kiválasztásával a grafikus ablakon nyomon lehet követni, hogy melyik elemről van szó. A történeti fa elsődleges szerepe az alapelemek módosíthatósága.
A módosítás parancsot a B(2,1) ikonnal indítjuk el, a méretszámok kiválasztása után pedig a felnyíló dialógusablakban módosíthatjuk. Ha nincsenek kint méretek, akkor tetszőleges méretet el tudunk helyezni a méretező segítésével.
A C mátrixban elhelyezett parancsok minden modulnál egységesen megtalálha-tóak, ezek a következő megjelenítéssel kapcsolatos feladatokat látják el:
• Újrarajzolás parancs C(1,1) • Vonalas ábrázolás ikongyűjtő C(1,2) • Árnyalt megjelenítés C(1,3) • Teljes méret ikongyűjtő C(2,1) • Nagyítás-kicsinyítés parancsok C(2,2) • Rajzfelület menü C(2,3) • Nézet ikongyűjtők C(3,1), C(3,2), C(4,1), C(4,2) • Leállító parancsikon C(3,3) • Nyomtatás parancsok C(4,3)
15.3. VÉGESELEMES ANALÍZIS
Az I-DEAS program végeselemes moduljának a Simulation nevet adták. Eb-ben a programrészben lehetősége van a felhasználónak tetszőleges peremértékfeladat felállítására, megoldására és a megoldás elemzésére. Itt most csak röviden utalunk rá, hogy melyik feladat elvégzése, melyik programrészben lehetséges.
Elsősorban a következő alrészek áttekintését tűzzük ki: • Simulation / Boundary Conditions, a peremfeltételek definiálása, • Simulation / Meshing, a végeselemes háló kialakítása, • Simulation / Model Solution, a peremértékfeladat megoldása, • Simulation / Post Processing, a kapott megoldások vizsgálata.
15.3.1. Peremértékfeladat kitűzése A Simulation modul Boundary Conditions al-
kalmazás kiválasztása után az A mátrix a 15.2. ábrán jel-zett formában jelenik meg.
A peremértékfeladat típusának kiválasztása az A(1,1) parancsok segítségével történik. Dinamikai peremfeltétele-ket az A(2,1) és A(2,2) ikongyűjtőben található utasítások-kal írhatunk elő. Az A(3,2) parancsgyűjtőben találhatók a hőmérsékletmező előírását szolgáló parancsok. A modell szabadságfokainak rögzítését az A(4,2)-ben található iko-nok szolgálják.
A peremfeltételek nyilvántartását és kezelését szolgáló két utasítás a Sets… és Boundary Conditions… az A(6,2) és A(6,1) helyen van elhelyezve.
15.2. ábra Az A mátrix
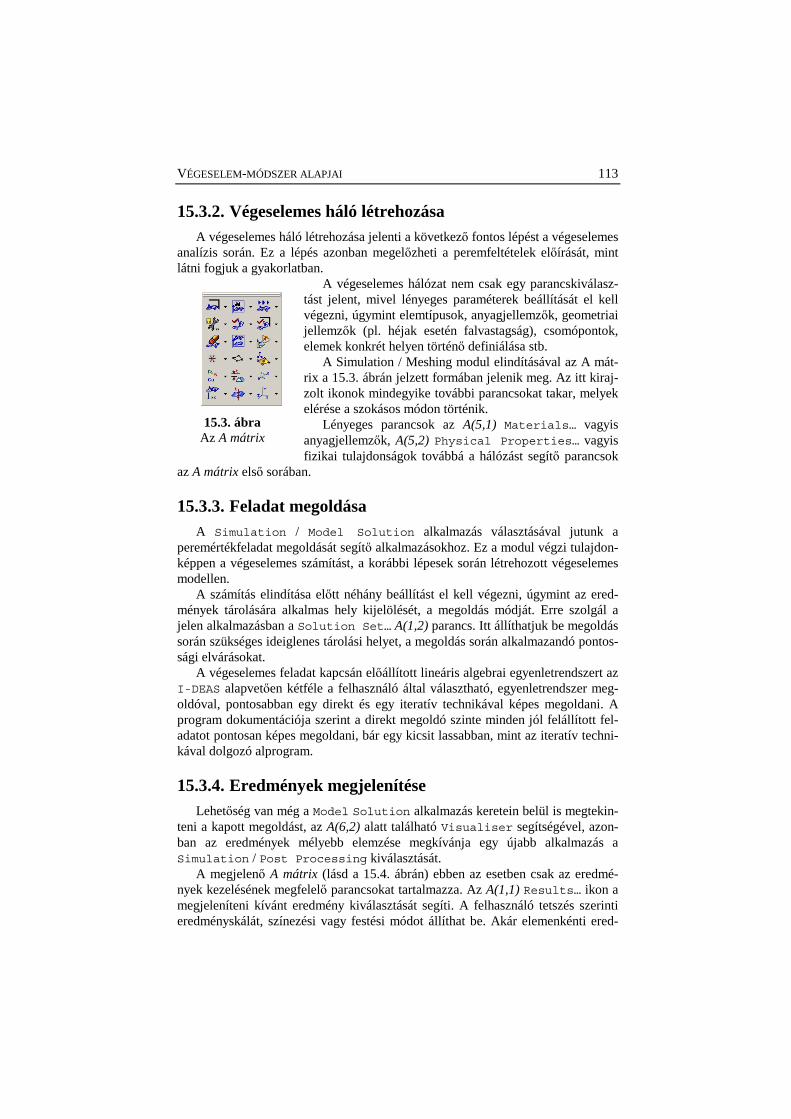
VÉGESELEM-MÓDSZER ALAPJAI 113
15.3.2. Végeselemes háló létrehozása A végeselemes háló létrehozása jelenti a következő fontos lépést a végeselemes
analízis során. Ez a lépés azonban megelőzheti a peremfeltételek előírását, mint látni fogjuk a gyakorlatban.
A végeselemes hálózat nem csak egy parancskiválasz-tást jelent, mivel lényeges paraméterek beállítását el kell végezni, úgymint elemtípusok, anyagjellemzők, geometriai jellemzők (pl. héjak esetén falvastagság), csomópontok, elemek konkrét helyen történő definiálása stb.
A Simulation / Meshing modul elindításával az A mát-rix a 15.3. ábrán jelzett formában jelenik meg. Az itt kiraj-zolt ikonok mindegyike további parancsokat takar, melyek elérése a szokásos módon történik.
Lényeges parancsok az A(5,1) Materials… vagyis anyagjellemzők, A(5,2) Physical Properties… vagyis fizikai tulajdonságok továbbá a hálózást segítő parancsok
az A mátrix első sorában.
15.3.3. Feladat megoldása A Simulation / Model Solution alkalmazás választásával jutunk a
peremértékfeladat megoldását segítő alkalmazásokhoz. Ez a modul végzi tulajdon-képpen a végeselemes számítást, a korábbi lépesek során létrehozott végeselemes modellen.
A számítás elindítása előtt néhány beállítást el kell végezni, úgymint az ered-mények tárolására alkalmas hely kijelölését, a megoldás módját. Erre szolgál a jelen alkalmazásban a Solution Set… A(1,2) parancs. Itt állíthatjuk be megoldás során szükséges ideiglenes tárolási helyet, a megoldás során alkalmazandó pontos-sági elvárásokat.
A végeselemes feladat kapcsán előállított lineáris algebrai egyenletrendszert az I-DEAS alapvetően kétféle a felhasználó által választható, egyenletrendszer meg-oldóval, pontosabban egy direkt és egy iteratív technikával képes megoldani. A program dokumentációja szerint a direkt megoldó szinte minden jól felállított fel-adatot pontosan képes megoldani, bár egy kicsit lassabban, mint az iteratív techni-kával dolgozó alprogram.
15.3.4. Eredmények megjelenítése Lehetőség van még a Model Solution alkalmazás keretein belül is megtekin-
teni a kapott megoldást, az A(6,2) alatt található Visualiser segítségével, azon-ban az eredmények mélyebb elemzése megkívánja egy újabb alkalmazás a Simulation / Post Processing kiválasztását.
A megjelenő A mátrix (lásd a 15.4. ábrán) ebben az esetben csak az eredmé-nyek kezelésének megfelelő parancsokat tartalmazza. Az A(1,1) Results… ikon a megjeleníteni kívánt eredmény kiválasztását segíti. A felhasználó tetszés szerinti eredményskálát, színezési vagy festési módot állíthat be. Akár elemenkénti ered-
15.3. ábra Az A mátrix

114 VÉGESELEM-MÓDSZER ALAPJAI
mény kirajzolást is előírhat. A program képes arra, hogy a kiszámított eredményeket animálja, mely jelentheti a kialakuló végső alak elérésének szemléltetését, vagy a feszültségállapot létrejöttét.
A különböző eredmények együttesen különböző ská-lázással is megtekinthetők, a felhasználói igények sze-rint. Természetesen a program az eredmények kirajzolá-sa során támogatja a különböző transzformációkat is. Figyelembe kell azonban venni, hogy a viszonylag sűrű végeselem hálózat, illetve a túl sok csomópont a kirajzo-lást korlátozhatja.
15.4. ábra A A mátrix
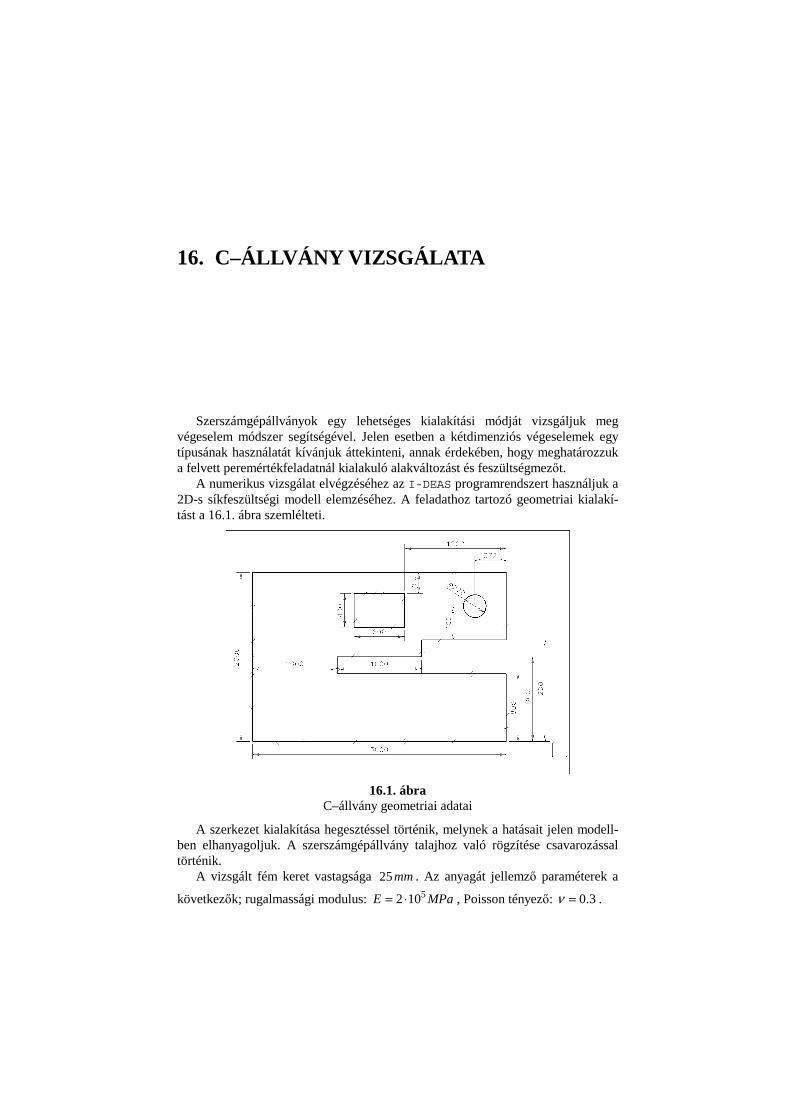
16. C–ÁLLVÁNY VIZSGÁLATA
Szerszámgépállványok egy lehetséges kialakítási módját vizsgáljuk meg végeselem módszer segítségével. Jelen esetben a kétdimenziós végeselemek egy típusának használatát kívánjuk áttekinteni, annak érdekében, hogy meghatározzuk a felvett peremértékfeladatnál kialakuló alakváltozást és feszültségmezőt.
A numerikus vizsgálat elvégzéséhez az I-DEAS programrendszert használjuk a 2D-s síkfeszültségi modell elemzéséhez. A feladathoz tartozó geometriai kialakí-tást a 16.1. ábra szemlélteti.
16.1. ábra C–állvány geometriai adatai
A szerkezet kialakítása hegesztéssel történik, melynek a hatásait jelen modell-ben elhanyagoljuk. A szerszámgépállvány talajhoz való rögzítése csavarozással történik.
A vizsgált fém keret vastagsága 25mm . Az anyagát jellemző paraméterek a
következők; rugalmassági modulus: 52 10E MPa= ⋅ , Poisson tényező: 0.3ν = .
116 VÉGESELEM-MÓDSZER ALAPJAI
A végeselemes számítások célja, hogy meghatározzuk a legnagyobb terhelés-kor kialakuló elmozdulásmezőt, melyből számítható a szerkezetben ébredő feszült-ség eloszlása is. Ennek minden valóságos esetben egy meghatározott korlát alatt kell lennie. Így tervezéskor előre lehet tudni azt, hogy mely helyeken és hogyan kell esetlegesen módosítani a szerkezetet a kívánt feszültségi korlátok betartása miatt.
Az I-DEAS használata során a következő főbb lépéseket kell megtenni a fel-adat végrehajtásához, melyeket a Simulation modulrészben találunk meg:
• Geometriai modell létrehozása: a Master Modeler segítségével történik. • A peremértékfeladat definiálása: a Boundary Conditions által. • Végeselemek létrehozása: a Meshing programrészben. • Feladat numerikus megoldása: a Model Solution alkalmazásban. • Az eredmények értékelése: a Post Processing programrésszel. A lépések végrehajtási sorrendje kötött, azonban a végeselemes háló kialakítá-
sa és a peremfeltételek előírása tetszőleges sorrendben történhet. Természetesen, ha a geometriai modellen helyezzük el a peremfeltételeket tehát az ott definiált élekhez, pontokhoz rendelünk kinematikai vagy dinamikai peremfeltételeket akkor az I-DEAS rendszer ezt átalakítja – a végeselem hálózat létrehozásakor – oly mó-don, hogy a peremfeltételek egyértelműen a csomópontokhoz legyenek társítva.
16.1. GEOMETRIA LÉTREHOZÁSA
A 16.1. ábrán vázolt szerkezet létrehozása a cé-lunk az I-DEAS rendszerben, melyhez a Simulation modul Master Model alkalmazását válasszuk ki, ahogy a 16.2. ábra szemlélteti.
A program alapbeállításait módosítani kell. Egy-részt az Options menüben a Units parancsot vá-lasszuk ki, és a kinyíló Popup menüben a mm[newton] lehetőséget jelöljük ki. Ezáltal a program a hosszúsági mérteteket mm-ben, az erőket N-ban várja el, illetve az eredményeket is ennek megfelelően mutatja.
Másrészt át kell állítani a munkaterület méretét is. Ehhez válasszuk a Workplane Appearance parancsot, melyet a B(2,3) ikongyűjtőben találunk. A kinyíló dialógusablakban beállíthatóak a rajzterület jellemző X és Y méretek, ahogy a 16.3. ábra mutatja.
16.2. ábra Geometria definiálása
VÉGESELEM-MÓDSZER ALAPJAI 117
16.3. ábra Rajzterület méretbeállítása
A C–állvány külső kontúrjának létrehozásához a Polylines parancs az A(2,1) ikongyűjtőben található. A méretek pontos beállításához a Modify Entity B(2,1) utasítás szükséges, melyet a méret kiválasztása után kell elindítani. A méretek be-állítása után mentsünk: Ctrl+S.
Következő lépésként a külső kontúr alapján létre kell hozni egy felületetet, melyből a kitöréseket kell majd kivágni. A Surface by Boundary A(5,1) parancs a külső kontúr kijelölése után létrehozza a kívánt felületet. A kivágandó négyzet és kör kontúrok létrehozásához szükséges a Center Edge A(3,1) körrajzoló és Polyline A(2,1) parancs. A méretek beállítása után válasszuk a Trim at Curve A(4,1) utasítást, mely ezen utóbb létrehozott kontúrokat vágja ki a korábban defi-niált felületből.
Végül nevezzük el a létrehozott modellt, a Name Parts B(4,2) utasítással, pl. callvany-ra. Ezzel készen van a geometriai modell, melyet a továbbiakban hasz-nálni fogunk a végeselemes modell létrehozásához. Mielőtt tovább haladunk ment-sünk: Ctrl+S.
16.2. VÉGESELEMES MODELL
Térjünk át a Simulation modul Meshing program-részbe (lásd. a 16.4. ábrát). Létrehozunk egy véges-elem modellt a Create FE Model B(4,2) utasítással.
Az anyagjellemzők beállítása a Materials A(5,1) paranccsal lehetséges, ahol az új anyagtábla létrehozását kell elindítani. Ekkor jutunk a 16.5. ábra által bemutatott dialógus ablakokhoz, ahol beállítjuk a kívánt anyagjel-lemzőket.
Ezt követően megadjuk a 2D-s elemekhez tartozó fizikai jellemzőket a Physical Property A(5,2) parancs segítségével. Itt 2D-s Plane Stress táblá-zatot kell kitölteni, szem előtt tartva, hogy a C–állvány vastagsága 25 mm (lásd a 16.6. ábrát).
16.4. ábra Végeselem hálózás
118 VÉGESELEM-MÓDSZER ALAPJAI
16.5. ábra Anyagtábla létrehozása
Ezután létrehozzuk a végeselem hálót, azaz definiáljuk a csomópontokat és a végeselemeket. Ehhez a Create Shell Mesh A(1,1) parancs elindítása szükséges, mely hatására megjelenik a 16.7. ábra által mutatott dialógus ablak.
16.6. ábra Fizikai jellemzők beállítása
A végeselem hálózat létrehozása ebben a feladatban a következő paraméterek beállításával történt: Element Length: 100, Element Family: Plane Stress, Element Type 6 csomópontú háromszögelem. Továbbá kiválasztásra került a már korában létrehozott anyag és fizikai jellemzők táblája.
VÉGESELEM-MÓDSZER ALAPJAI 119
16.7. ábra Végeselem háló létrehozása
A létrehozott végeselem hálózatot a 16.8. ábra szemlélteti. A végeselem mo-dellről mostmár csak a perem-feltélelek előírása hiányzik. Ehhez át kell lépnünk a Simulation modul Boundary Conditions alkalmazá-sába.
Mielőtt azonban továbbhaladunk végezzünk egy mentést: Ctrl+S.
A peremfeltételek közül először a
kinematikai peremfeltételeket adjuk meg, ehhez válasszuk a Dis-
placement Restraint A(4,1) uta-sítást. A rögzíteni kívánt csomópon-tokat kijelölve és Done paranccsal elfogadva jutunk a 16.9. ábrán jelzett dialógusablakhoz. Itt kiválasztható, hogy milyen típusú megfogásokat kívánunk alkalmazni az adott helye-ken. Jelen feladat kapcsán a C–állvány bal oldalán Clamp míg jobb oldalán Slider(X) típusú rögzítést adtunk meg. A dialógus ablak bezárásával a végeselemes hálón megjelennek a megfogást jelző szimbólumok, ahogy ezt a 16.8. ábra mutatja.
A dinamikai peremfeltételek megadása a Force A(2,1) paranccsal történik. A csomópontok kijelölése majd elfogadása után megadjuk az adott helyen működő
16.8. ábra Végeselem hálózat
16.9. ábra Kinematikai peremfeltételek előírása
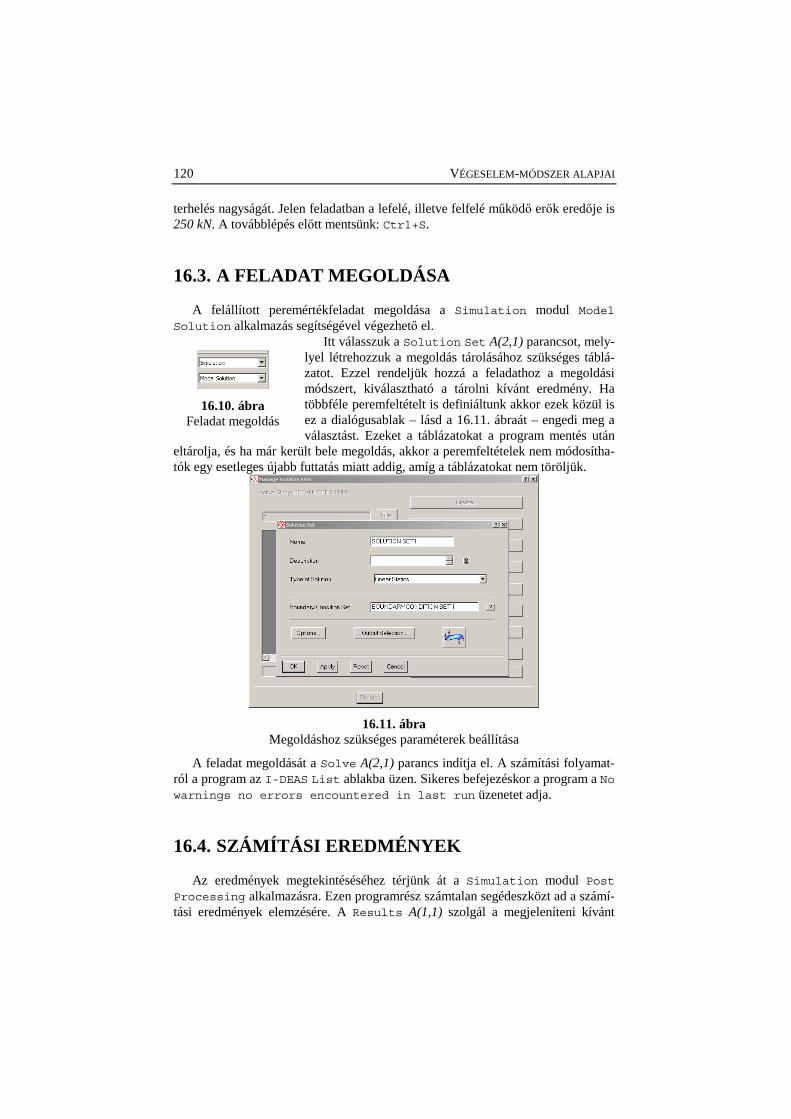
120 VÉGESELEM-MÓDSZER ALAPJAI
terhelés nagyságát. Jelen feladatban a lefelé, illetve felfelé működő erők eredője is 250 kN. A továbblépés előtt mentsünk: Ctrl+S.
16.3. A FELADAT MEGOLDÁSA
A felállított peremértékfeladat megoldása a Simulation modul Model Solution alkalmazás segítségével végezhető el.
Itt válasszuk a Solution Set A(2,1) parancsot, mely-lyel létrehozzuk a megoldás tárolásához szükséges táblá-zatot. Ezzel rendeljük hozzá a feladathoz a megoldási módszert, kiválasztható a tárolni kívánt eredmény. Ha többféle peremfeltételt is definiáltunk akkor ezek közül is ez a dialógusablak – lásd a 16.11. ábraát – engedi meg a választást. Ezeket a táblázatokat a program mentés után
eltárolja, és ha már került bele megoldás, akkor a peremfeltételek nem módosítha-tók egy esetleges újabb futtatás miatt addig, amíg a táblázatokat nem töröljük.
16.11. ábra Megoldáshoz szükséges paraméterek beállítása
A feladat megoldását a Solve A(2,1) parancs indítja el. A számítási folyamat-ról a program az I-DEAS List ablakba üzen. Sikeres befejezéskor a program a No warnings no errors encountered in last run üzenetet adja.
16.4. SZÁMÍTÁSI EREDMÉNYEK
Az eredmények megtekintéséséhez térjünk át a Simulation modul Post Processing alkalmazásra. Ezen programrész számtalan segédeszközt ad a számí-tási eredmények elemzésére. A Results A(1,1) szolgál a megjeleníteni kívánt
16.10. ábra Feladat megoldás
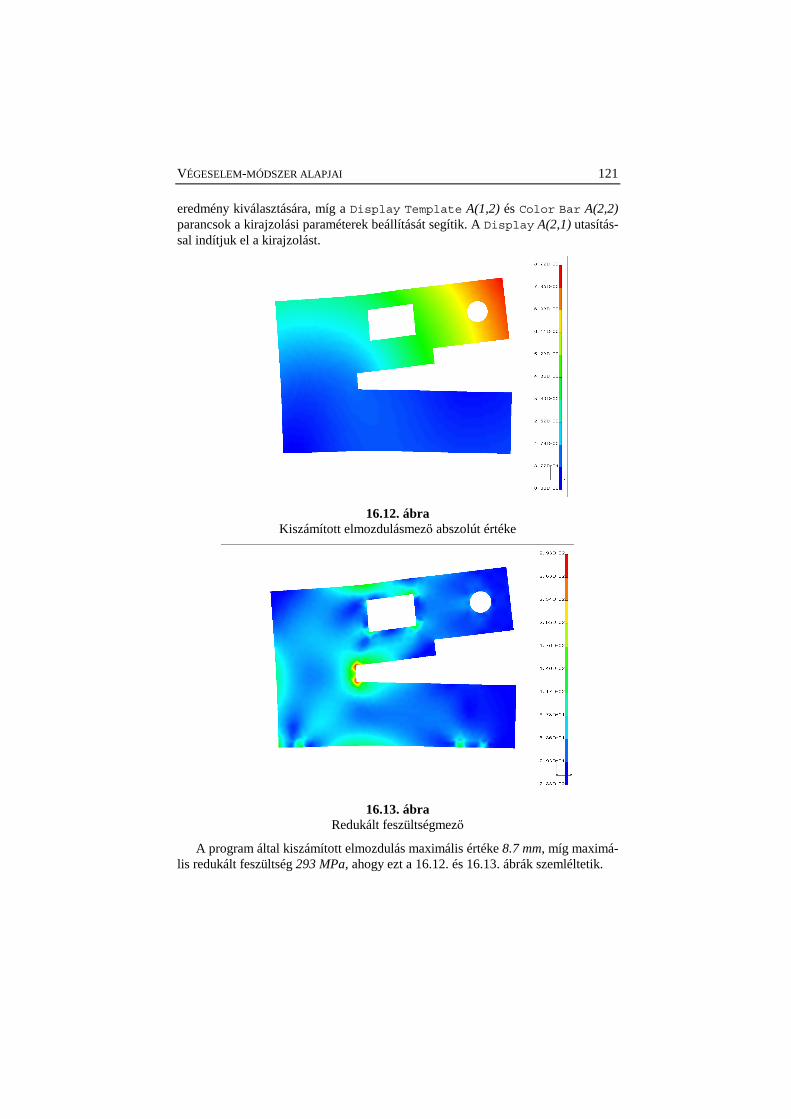
VÉGESELEM-MÓDSZER ALAPJAI 121
eredmény kiválasztására, míg a Display Template A(1,2) és Color Bar A(2,2) parancsok a kirajzolási paraméterek beállítását segítik. A Display A(2,1) utasítás-sal indítjuk el a kirajzolást.
16.12. ábra Kiszámított elmozdulásmező abszolút értéke
16.13. ábra Redukált feszültségmező
A program által kiszámított elmozdulás maximális értéke 8.7 mm, míg maximá-lis redukált feszültség 293 MPa, ahogy ezt a 16.12. és 16.13. ábrák szemléltetik.
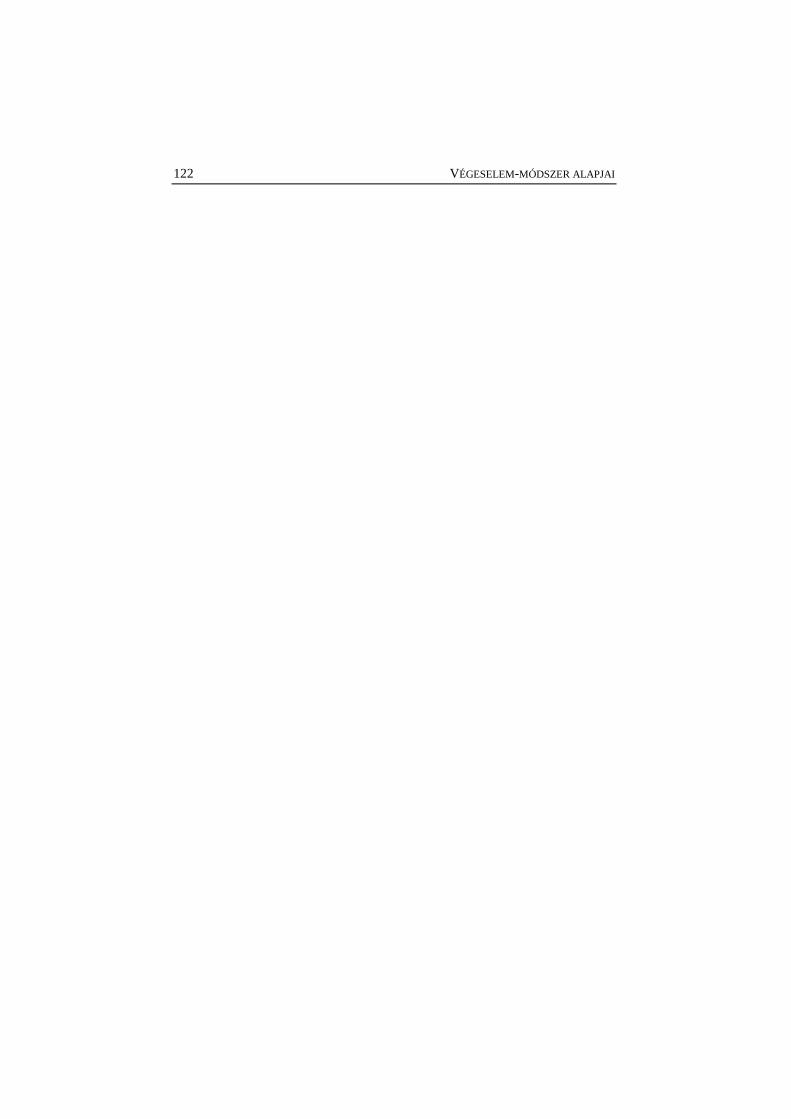
122 VÉGESELEM-MÓDSZER ALAPJAI
17. TENGELYSZIMMETRIKUS FELADAT ELEMZÉSE
17.1. A PEREMÉRTÉKFELADAT
Vizsgálatunk tárgya egy belsőnyomással terhelt, függőlegesen álló alumínium gázpalack. A szerkezet geometriája és terhelése egyaránt tengelyszimmetrikus. Ebből következik, hogy a fellépő mechanikai jellemző mennyiségek függetlenek a forgásszögtől. Azaz az eredetileg háromdimenziós feladat valójában kétdimenziós-ra redukálódik. Ilyen esetben elegendő a feladat egyetlen meridián metszetét vizs-gálni. Ez igen nagypontosságú elemzést tesz lehetővé, hiszen egyetlen metszeten igen sűrű felosztás vehető fel relatíve kis ismeretlenszám mellett.
A tengelyszimmetrikus feladatokat az I-DEAS programrendszer a z forgásten-gelyű x-z koordinátarendszer első és negyedik síknegyedében elhelyezett meridián metszetén értelmezi.
A szerkezet geometriáját a jellemző méretek feltüntetésével a 17.1. ábra szem-lélteti. A tartály egész metszetét egyetlen zárt felületként definiáljuk. A tartományt 6 csomópontú, kvadratikus approximációt biztosító háromszög alakú elemekre osztjuk fel. A látszólag síkbeli elemek - mechanikai szempontból - a metszetnek megfelelő gyűrű elemeket írnak le. A tartályt 3 mm falvastagságú alumínium le-mezből készült. Az alumínium (AL_2014) ötvözet lineárisan rugalmas anyagjel-lemzői adottak: E=77000 MPa, v=0.33. A tartály belső falán 7 bar túlnyomást írunk elő.
Az elvégzendő számítás után az eredmények közül megtekinthetjük többek kö-zött az elmozdulást és a feszültségeket.
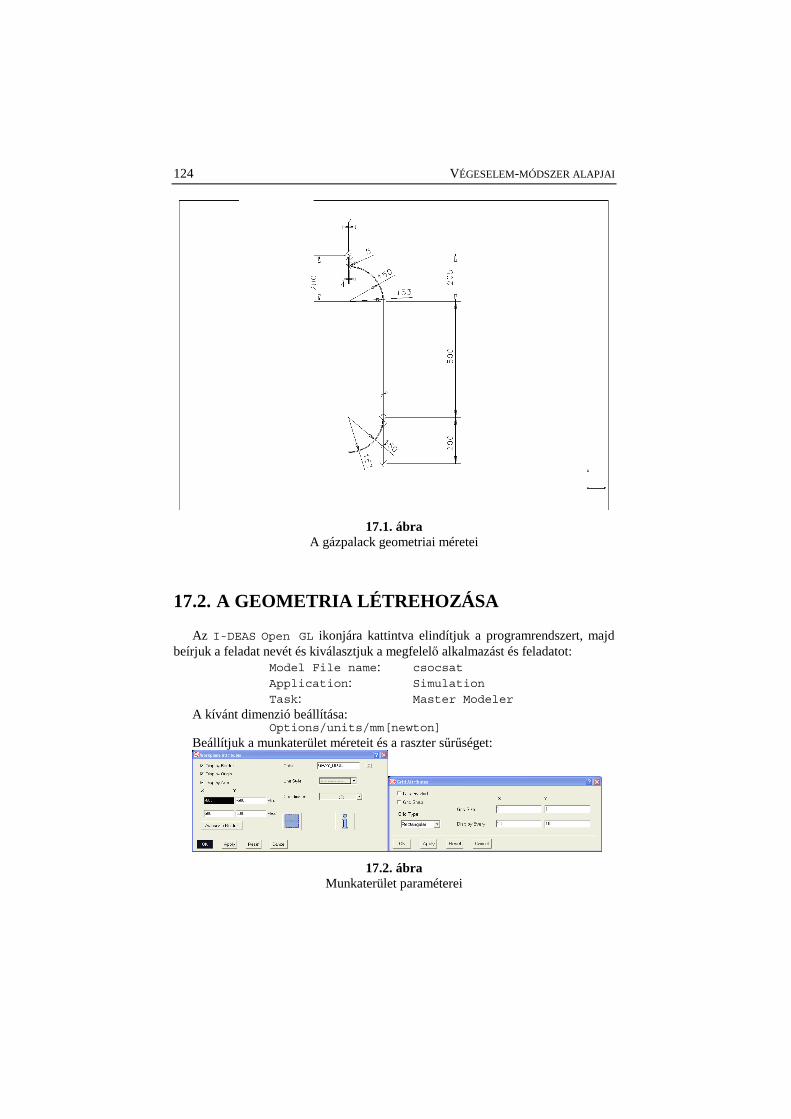
124 VÉGESELEM-MÓDSZER ALAPJAI
17.1. ábra A gázpalack geometriai méretei
17.2. A GEOMETRIA LÉTREHOZÁSA
Az I-DEAS Open GL ikonjára kattintva elindítjuk a programrendszert, majd beírjuk a feladat nevét és kiválasztjuk a megfelelő alkalmazást és feladatot: Model File name: csocsat Application: Simulation Task: Master Modeler
A kívánt dimenzió beállítása: Options/units/mm[newton]
Beállítjuk a munkaterület méreteit és a raszter sűrűséget:
17.2. ábra Munkaterület paraméterei
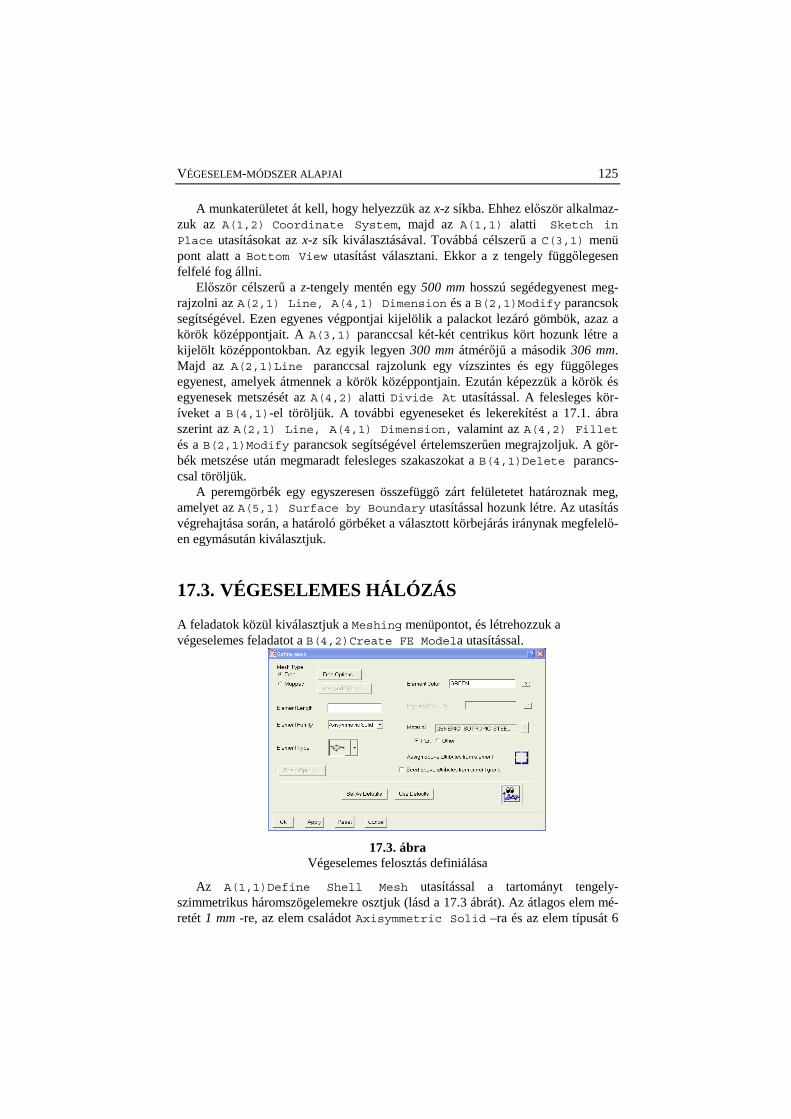
VÉGESELEM-MÓDSZER ALAPJAI 125
A munkaterületet át kell, hogy helyezzük az x-z síkba. Ehhez először alkalmaz-zuk az A(1,2) Coordinate System, majd az A(1,1) alatti Sketch in Place utasításokat az x-z sík kiválasztásával. Továbbá célszerű a C(3,1) menü pont alatt a Bottom View utasítást választani. Ekkor a z tengely függőlegesen felfelé fog állni.
Először célszerű a z-tengely mentén egy 500 mm hosszú segédegyenest meg-rajzolni az A(2,1) Line, A(4,1) Dimension és a B(2,1)Modify parancsok segítségével. Ezen egyenes végpontjai kijelölik a palackot lezáró gömbök, azaz a körök középpontjait. A A(3,1) paranccsal két-két centrikus kört hozunk létre a kijelölt középpontokban. Az egyik legyen 300 mm átmérőjű a második 306 mm. Majd az A(2,1)Line paranccsal rajzolunk egy vízszintes és egy függőleges egyenest, amelyek átmennek a körök középpontjain. Ezután képezzük a körök és egyenesek metszését az A(4,2) alatti Divide At utasítással. A felesleges kör-íveket a B(4,1)-el töröljük. A további egyeneseket és lekerekítést a 17.1. ábra szerint az A(2,1) Line, A(4,1) Dimension, valamint az A(4,2) Fillet és a B(2,1)Modify parancsok segítségével értelemszerűen megrajzoljuk. A gör-bék metszése után megmaradt felesleges szakaszokat a B(4,1)Delete parancs-csal töröljük.
A peremgörbék egy egyszeresen összefüggő zárt felületetet határoznak meg, amelyet az A(5,1) Surface by Boundary utasítással hozunk létre. Az utasítás végrehajtása során, a határoló görbéket a választott körbejárás iránynak megfelelő-en egymásután kiválasztjuk.
17.3. VÉGESELEMES HÁLÓZÁS
A feladatok közül kiválasztjuk a Meshing menüpontot, és létrehozzuk a végeselemes feladatot a B(4,2)Create FE Modela utasítással.
17.3. ábra Végeselemes felosztás definiálása
Az A(1,1)Define Shell Mesh utasítással a tartományt tengely-szimmetrikus háromszögelemekre osztjuk (lásd a 17.3 ábrát). Az átlagos elem mé-retét 1 mm -re, az elem családot Axisymmetric Solid –ra és az elem típusát 6
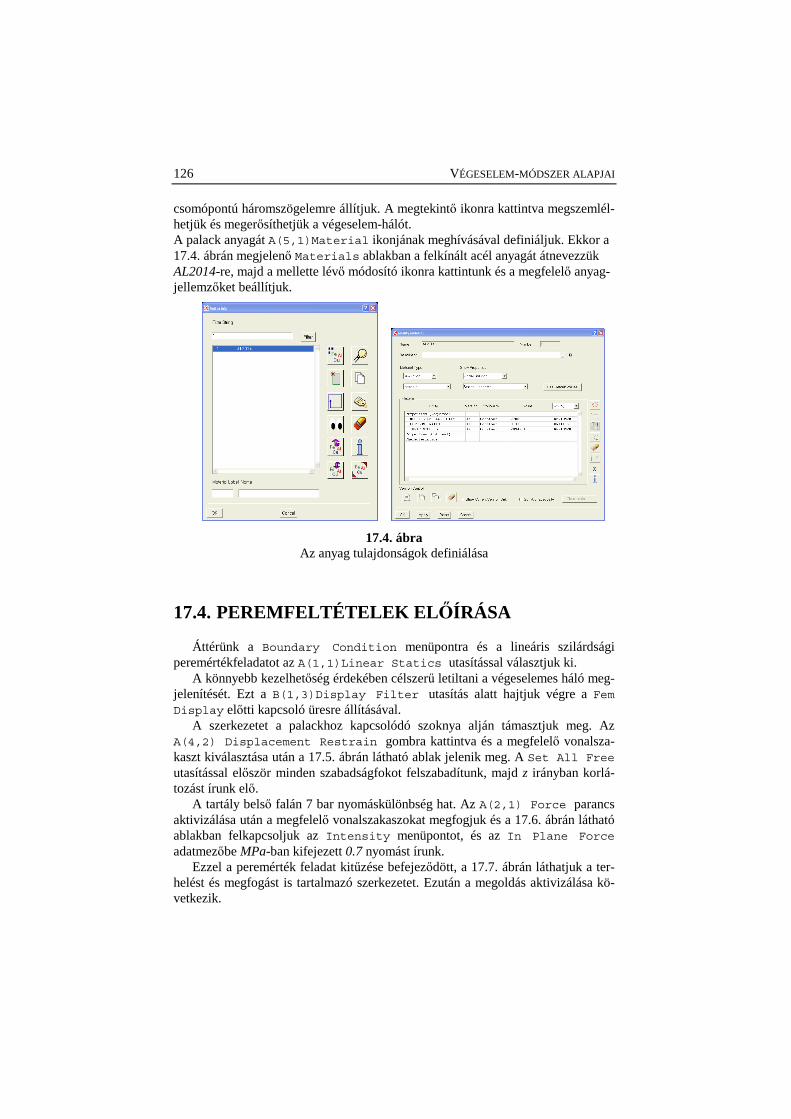
126 VÉGESELEM-MÓDSZER ALAPJAI
csomópontú háromszögelemre állítjuk. A megtekintő ikonra kattintva megszemlél-hetjük és megerősíthetjük a végeselem-hálót. A palack anyagát A(5,1)Material ikonjának meghívásával definiáljuk. Ekkor a 17.4. ábrán megjelenő Materials ablakban a felkínált acél anyagát átnevezzük AL2014-re, majd a mellette lévő módosító ikonra kattintunk és a megfelelő anyag-jellemzőket beállítjuk.
17.4. ábra Az anyag tulajdonságok definiálása
17.4. PEREMFELTÉTELEK ELŐÍRÁSA
Áttérünk a Boundary Condition menüpontra és a lineáris szilárdsági peremértékfeladatot az A(1,1)Linear Statics utasítással választjuk ki.
A könnyebb kezelhetőség érdekében célszerű letiltani a végeselemes háló meg-jelenítését. Ezt a B(1,3)Display Filter utasítás alatt hajtjuk végre a Fem Display előtti kapcsoló üresre állításával.
A szerkezetet a palackhoz kapcsolódó szoknya alján támasztjuk meg. Az A(4,2) Displacement Restrain gombra kattintva és a megfelelő vonalsza-kaszt kiválasztása után a 17.5. ábrán látható ablak jelenik meg. A Set All Free utasítással először minden szabadságfokot felszabadítunk, majd z irányban korlá-tozást írunk elő.
A tartály belső falán 7 bar nyomáskülönbség hat. Az A(2,1) Force parancs aktivizálása után a megfelelő vonalszakaszokat megfogjuk és a 17.6. ábrán látható ablakban felkapcsoljuk az Intensity menüpontot, és az In Plane Force adatmezőbe MPa-ban kifejezett 0.7 nyomást írunk.
Ezzel a peremérték feladat kitűzése befejeződött, a 17.7. ábrán láthatjuk a ter-helést és megfogást is tartalmazó szerkezetet. Ezután a megoldás aktivizálása kö-vetkezik.
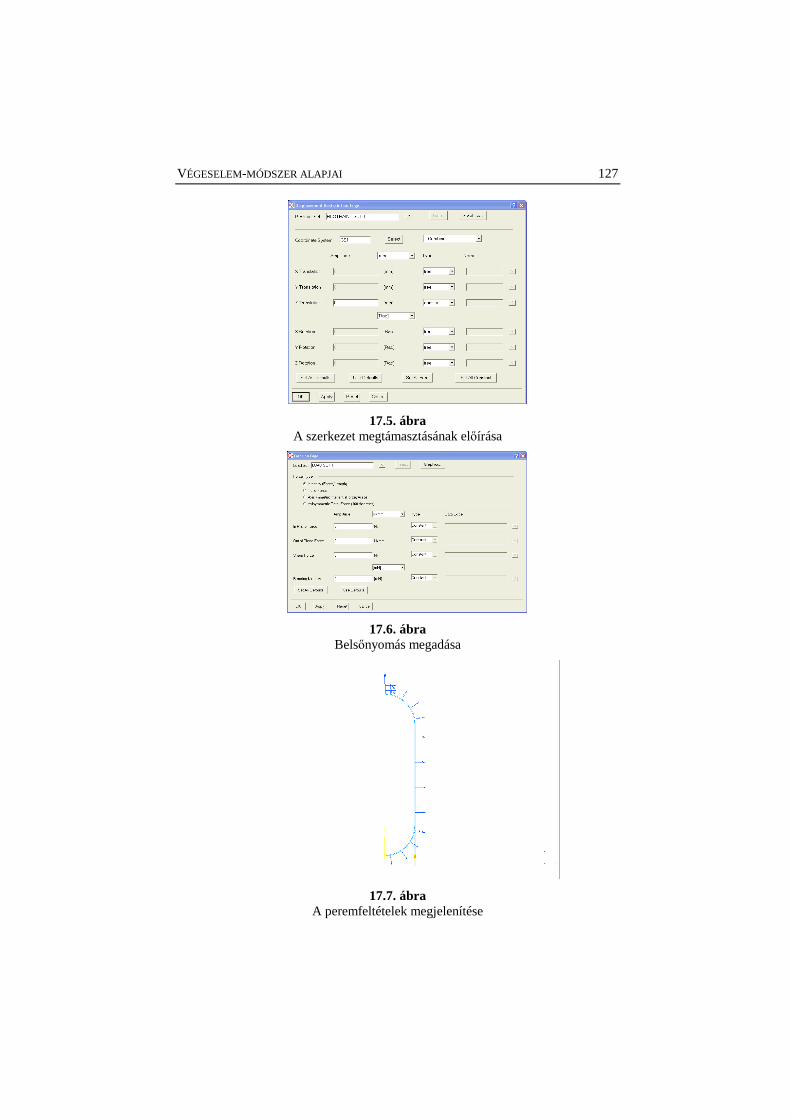
VÉGESELEM-MÓDSZER ALAPJAI 127
17.5. ábra A szerkezet megtámasztásának előírása
17.6. ábra Belsőnyomás megadása
17.7. ábra A peremfeltételek megjelenítése
128 VÉGESELEM-MÓDSZER ALAPJAI
17.5. A FELADAT MEGOLDÁSA
A feladatok közül kiválasztjuk a Model Solution menüpontot. A feladatunkat lineáris módszerrel oldjuk meg: A(1,1) Linear
Hivatkozunk a kijelölt peremfeltételekre: A(1,2) Solution Set [Create]
A megoldó elindítása A(2,1) Solve
17.6. AZ EREDMÉNYEK KIÉRTÉKELÉSE
A feladatok közül kiválasztjuk a Post Processing menüpontot. Az eredmé-nyek megtekintése során célszerű elrejteni nemcsak a végeselemhálót hanem a szerkezeti rajzokat is.
A rajzok elrejtése: B(1,2) Display Filter [ ]Wireframe [ ]Parts [ ]Assembly [ ]Work Plane [ ]Model views Border [ ] FE Model
az elrejtést az objektumok előtti megjelölés megszüntetésével érhetjük el. A szemléltetendő eredmények kiválasztása:
Elmozdulás abszolút értéke A(1,1) Results [1-B.C. 1,DISPLACEMENT…] [Magnitude] [1-B.C. 1,DISPLACEMENT…] A(2,1) Display Közép Billentyű Az elmozdulást 17.8. ábra mutatja. Redukált feszültség A(1,1) Results [3-B.C. 1,STRESS…] [von Mises] [1-B.C. 1,DISPLACEMENT…] A(2,1) Display Közép Billentyű A redukált feszültséget a kinagyított szerkezeti részeken a 17.9. ábra szemlélte-
ti. A többi feszültségi komponens és a főfeszültségek hasonló módon megjelenít-hetők és ezzel a feladat teljes feszültségi analízise elvégezhető.
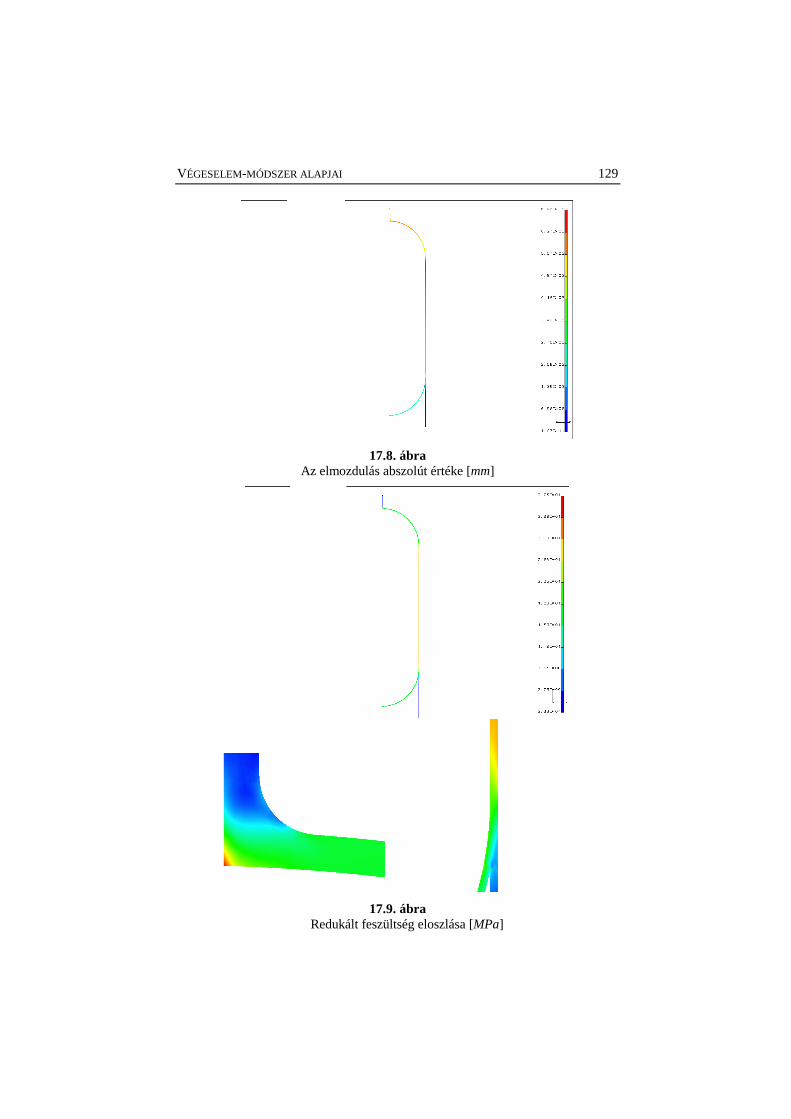
VÉGESELEM-MÓDSZER ALAPJAI 129
17.8. ábra Az elmozdulás abszolút értéke [mm]
17.9. ábra Redukált feszültség eloszlása [MPa]

130 VÉGESELEM-MÓDSZER ALAPJAI
18. CSŐCSATLAKOZÁS VIZSGÁLATA
18.1. A PEREMÉRTÉKFELADAT ISMERTETÉSE
Egy-egy speciális esettől eltekintve a csövek csatlakozásait gyakran héjfeladat-ként modellezhetjük. Itt egy belső nyomással terhelt két különböző átmérőjű cső-ből álló rendszer szilárdsági analízisét mutatjuk be.
A 18.1. ábrán egy 200 mm ámérőjű hajlított csőbe egy 100 mm átmérőjű szin-tén hajlított cső csatlakozik. A kétféle cső geometriája az alábbi módon van kiala-kítva. A nagyobbik 200 mm átmérőjű cső egyenes szakaszának hossza 1000 mm, amely egy 90 fokos könyökben folytatódik. A könyök középvonalának sugara 500 mm. A kisebb 100 mm átmérőjű cső merőlegesen csatlakozik a nagyobb átmérőjű csőbe, úgy, hogy a tengelyeik is merőlegesen metszik egymást. Az egyenes sza-kasz a csövek áthatásánál kezdődik, a végpontja a középvonalak metszésétől mér-ve 250 mm távolságra van. Ez a cső is 90 fokos könyökben folytatódik, amelynek középvonala egy 250 mm sugarú körívet ír le. A könyök után a cső 500 mm hosszú egyenes szakasszal rendelkezik.
A 200 mm átmérőjű cső falvastagsága 20 mm, a 100 mm átmérőjűé 14 mm. A csövek anyaga acél. Az acél rugalmassági modulusa E= 200000 MPa, a Poisson tényező v=0.33.
A csövek végei be vannak falazva, azaz az elmozdulási és a szögelfordulási koordináták egyaránt kötöttek. A csöveket 50 bar belsőnyomás terheli.
A szerkezet megrajzolása során két alkatrészt (Part-ot) hozunk létre egyiket a 200 mm átmérőjű cső alkotja, másikat a 100 mm átmérőjű. A két Part-ból egy összeállítást (Assembly-t) építünk fel és az áthatást, ez utóbbin hajtjuk végre. A végelemes feladatot is az Assembly–hez rendeljük. A megfelelő héjvastagságot előírjuk, és az elemhálózást létrehozzuk az összeállításon. A szerkezet szabad pe-remein az elmozdulást és a szögelfordulást egyaránt megakadályozzuk, a felülete-ken pedig a belsőnyomást írjuk elő. A kitűzött peremértékfeladat megoldása után az eredményeket szemléltetjük.
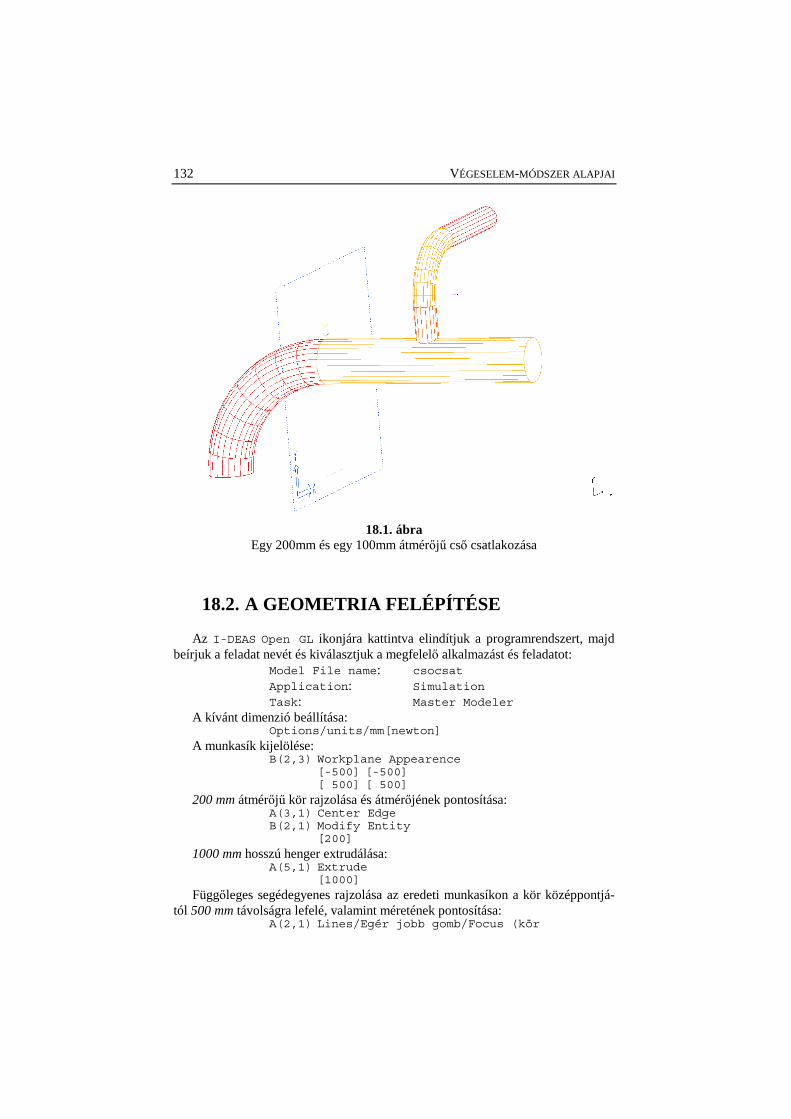
132 VÉGESELEM-MÓDSZER ALAPJAI
18.1. ábra
Egy 200mm és egy 100mm átmérőjű cső csatlakozása
18.2. A GEOMETRIA FELÉPÍTÉSE
Az I-DEAS Open GL ikonjára kattintva elindítjuk a programrendszert, majd beírjuk a feladat nevét és kiválasztjuk a megfelelő alkalmazást és feladatot: Model File name: csocsat Application: Simulation Task: Master Modeler
A kívánt dimenzió beállítása: Options/units/mm[newton]
A munkasík kijelölése: B(2,3) Workplane Appearence [-500] [-500] [ 500] [ 500]
200 mm átmérőjű kör rajzolása és átmérőjének pontosítása: A(3,1) Center Edge B(2,1) Modify Entity [200]
1000 mm hosszú henger extrudálása: A(5,1) Extrude [1000]
Függőleges segédegyenes rajzolása az eredeti munkasíkon a kör középpontjá-tól 500 mm távolságra lefelé, valamint méretének pontosítása:
A(2,1) Lines/Egér jobb gomb/Focus (kör
VÉGESELEM-MÓDSZER ALAPJAI 133
középpontját kiválasztjuk)/Locate start/ Locate end/
A(4,1) Dimension [500]
Egy vízszintes segédegyenes (forgástengely) rajzolása A(2,1) Lines
A csőkönyök létrehozása forgatással A(5,1) Revolve Angle [90] *Protrude
A 200 mm átmérőjű cső Part elnevezése: B(4,2) Name Parts [D200]
Függőleges segédegyenes rajzolása az eredeti munkasíkon a kör középpontjá-tól 250 mm távolságra felfelé, méretének pontosítása:
A(2,1) Lines/Egér jobb gomb/Focus (kör középpontját kiválasztjuk)/Locate start/
Locate end A(4,1) Dimension [250]
Vízszintes segédegyenes rajzolása A(2,1) Lines
Segédsík extrudálása a megrajzolt egyenes segítségével: A(5,1) Extrude [500]
A munkasík áthelyezése a segédsíkra: A(1,1) Sketch in place
A síkra merőleges nézet kiválasztása: C(3,1)
100mm átmérőjű kör rajzolása az új munkasíkon A(3,1) Center Edge B(2,1) Modify Entity [100]
250 mm hosszú henger extrudálása lefelé: A(5,1) Extrude *Newpart [250]
A 100 mm átmérőjű cső Part elnevezése: B(4,2) Name Parts [D100]
A munkasík áthelyezése az extrudált hengert lezáró felületén: A(1,1) Sketch in place
Merőleges segédegyenes rajzolása az eredeti munkasíkon a kör középpontjától 250 mm távolságra kifelé, azaz a 200 mm átmérőjű egyenes csőre merőlegesen, méretének pontosítása:
A(2,1) Lines/Egér jobb gomb/Focus (kör középpontját kiválasztjuk)/Locate start/
Locate end A(4,1) Dimension [250]
Vízszintes segédegyenes (forgástengely) rajzolása: A(2,1) Lines
A csőkönyök létrehozása forgatással:
134 VÉGESELEM-MÓDSZER ALAPJAI
A(5,1) Revolve Angle [90] *Protrude
500 m hosszú egyenes csőszakasz rajzolása: A(5,1) Extrude *Join [500]
Az összeszerelés feladat kiválasztása Master Assembly
Összeszerelés: A(1,1) Hierarchy
a(1,1) Name/[Assembly1] a(2,1) Add to Assemnbly [D200, D100]
Az áthatás végrehajtása: A(5,3) Join A(5,3) Cut
18.3. VÉGESELEMES HÁLÓZÁS
A feladatok közül kiválasztjuk a Meshing menüpontot. A végeselemes feladat létrehozása: B(4,2) Create FE Model [Assembly1] [Part3]
Hálózás átlagosan 15 mm méretű 6 csomópontú háromszög héjelemekkel: A(1,1) Define Shell Mesh(felületek kiválasztása) [15] [Thin Shell] [6 csomópontú háromszögelem] [@@]megtekintés/Keep Mesh
Falvastagságok megadása: A(7,2) Surface Thickness [20] A(7,2) Surface Thickness [14]
18.4. PEREMFELTÉTELEK ELŐÍRÁSA
A feladatok közül kiválasztjuk a Boundary Condition menüpontot. A hálózat elrejtése: B(1,2) Display Filter [ ] FE Model
Befalazás előírása: A(4,2) Displacement Restraint [OK]
50 bar belső nyomás előírása a csövekben: A(2,2) Pressure (felületek kiválasztásával) [5]
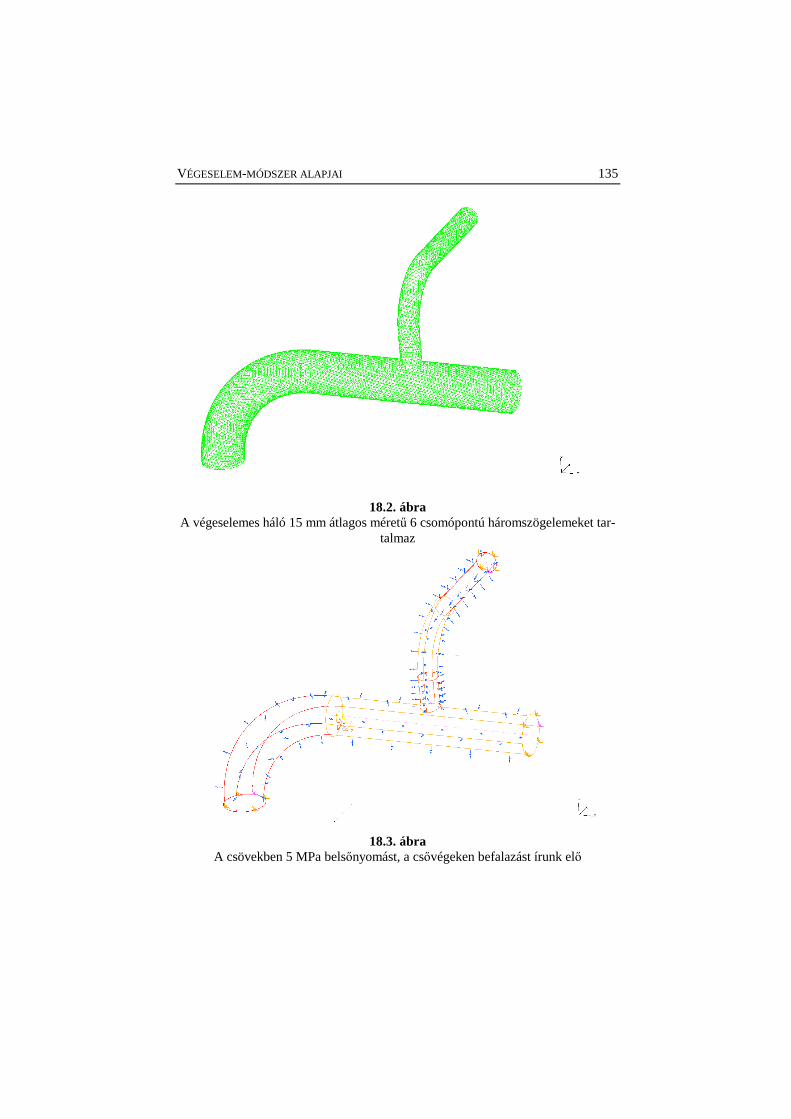
VÉGESELEM-MÓDSZER ALAPJAI 135
18.2. ábra A végeselemes háló 15 mm átlagos méretű 6 csomópontú háromszögelemeket tar-
talmaz
18.3. ábra A csövekben 5 MPa belsőnyomást, a csővégeken befalazást írunk elő
136 VÉGESELEM-MÓDSZER ALAPJAI
18.5. A FELADAT MEGOLDÁSA
A feladatok közül kiválasztjuk a Model Solution menüpontot. A feladatunkat lineáris módszerrel oldjuk meg: A(1,1) Linear
Hivatkozunk a kijelölt peremfeltételekre: A(1,2) Solution Set [Create]
A megoldó elindítása A(2,1) Solve
18.6. AZ EREDMÉNYEK SZEMLÉLTETÉSE
A feladatok közül kiválasztjuk a Post Processing menüpontot. Az eredmé-nyek megtekintése során célszerű elrejteni nem csak a végeselemhálót hanem a szerkezeti rajzokat is.
A rajzok elrejtése: B(1,2) Display Filter [ ]Wireframe [ ]Parts [ ]Assembly [ ]Work Plane [ ]Model views Border [ ] FE Model
az elrejtést az objektumok előtti megjelölés megszüntetésével érhetjük el. A szemléltetendő eredmények kiválasztása:
Elmozdulás abszolút értéke A(1,1) Results [1-B.C. 1,DISPLACEMENT…] [Magnitude] [1-B.C. 1,DISPLACEMENT…] A(2,1) Display Közép Billentyű Redukált feszültség A(1,1) Results [3-B.C. 1,STRESS…] [von Mises] [1-B.C. 1,DISPLACEMENT…] A(2,1) Display Közép Billentyű A számítást célszerű megismételni sűrűbb felosztással is, azaz átlagosan 7.5
mm, valamint 3.75 mm méretű háromszög alakú elemekkel is. A vizsgálat célja, hogy meggyőződjünk arról, hogy a kapott feszültségcsúcsok vajon tartanak-e egy képzeletbeli egzakt határértékhez?
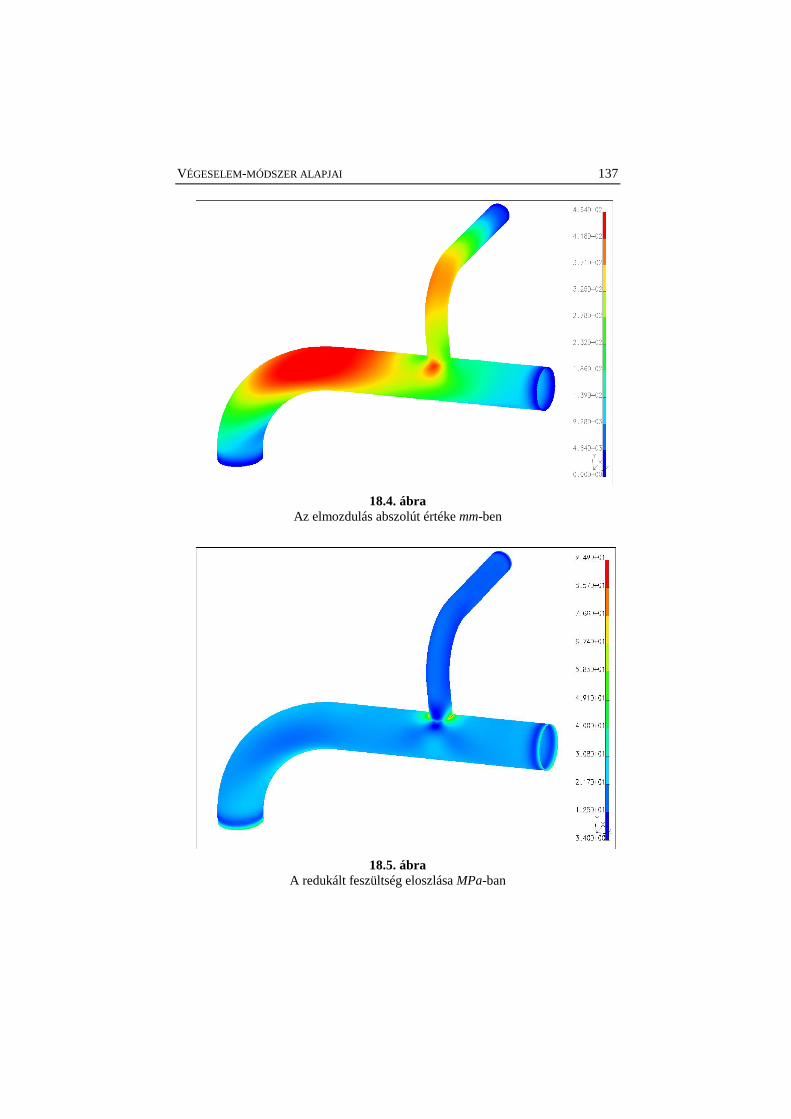
VÉGESELEM-MÓDSZER ALAPJAI 137
18.4. ábra Az elmozdulás abszolút értéke mm-ben
18.5. ábra A redukált feszültség eloszlása MPa-ban
138 VÉGESELEM-MÓDSZER ALAPJAI
19. TÉRBELI FELADAT MODELLEZÉSE
Ebben a fejezetben térbeli feladatok modellezésére mutatunk be példákat. Megismerkedhetünk az I-DEAS programrendszerben alkalmazható térbeli elemtí-pusokkal és a térbeli hálógenerálással.
Egy fali konzolt fogunk modellezni, amelyet két csavarral rögzítünk a falhoz. Feltételezzük, hogy két konzol felső felületére fektetünk egy polcot, amit 500 N erővel terhelünk. A konzolok és a terhelés szimmetrikus elrendezése esetén mind-két konzol felső felületére 250 N eredőjű egyenletesen megoszló terhelés jut.
A konzolok és a polc helyett csak egyetlen konzolt modellezünk: előállítjuk a geometriát, megadjuk a peremfeltételeket, előállítjuk a térbeli végeselemes hálót, lefuttatjuk a számítást, majd kiértékeljük az eredményeket.
19.1. A GEOMETRIA ELŐÁLLÍTÁSA
A fali konzol előállításához az I-DEAS programrend-szer Simulation moduljának Master Modeler alkalmazását válasszuk ki. Az Options/Units pa-ranccsal állítsuk be az alkalmazott mértékegységeket mil-liméterre és Newtonra.
A konzol szelvényének kontúrját a Polylines pa-ranccsal hozzuk létre (A(2, 1) ikongyűjtő). Töröljük a felesleges méreteket a B(4, 1) Delete parancs segítsé-gével, majd állítsuk elő a mérethálót (A(4, 1) Dimension). Állítsuk be a kívánt méreteket a B(2, 1) Modify Entity paranccsal. A modellt a CTRL-A billen-tyűzetkombinációval nagyíthatjuk látható méretűre. A lekerekítéseket az A(4, 2) Fillet paranccsal (Trim/Extend opció bekapcsolva) hozhatjuk létre. Extrudáljuk a kontúrt 30 mm-es vastagságúra (A(5, 1) Extrude).
19.1. ábra Master Modeler
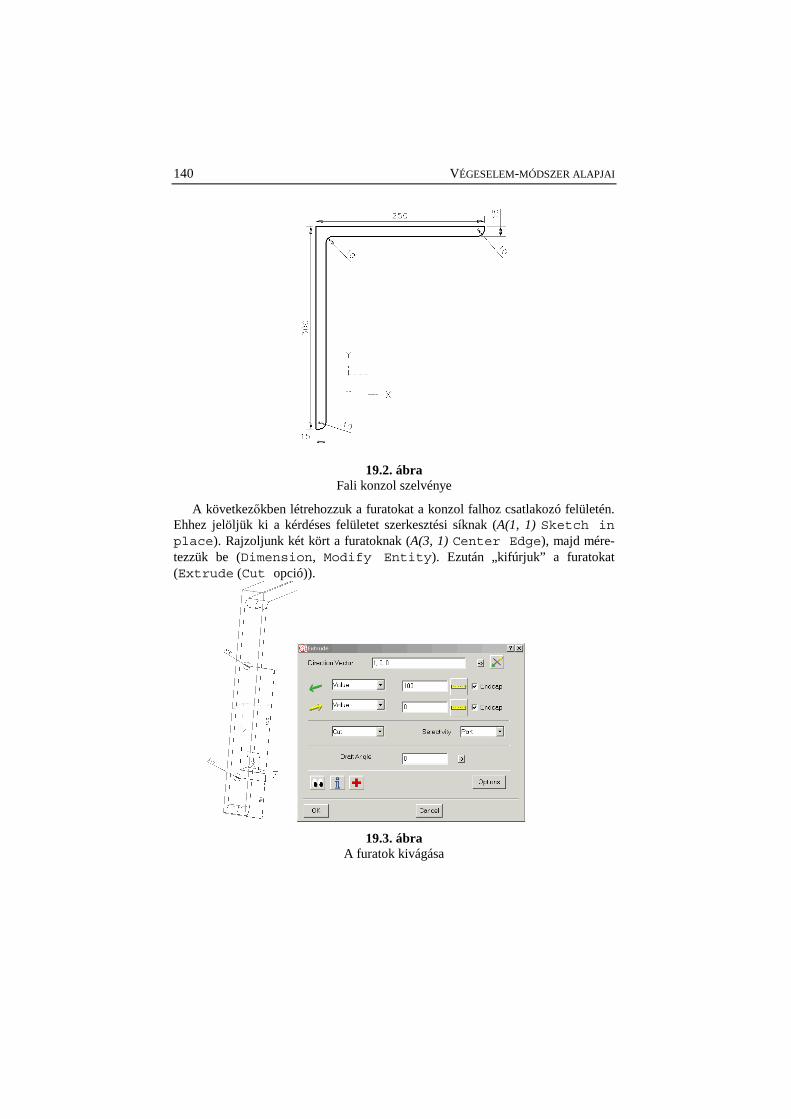
140 VÉGESELEM-MÓDSZER ALAPJAI
19.2. ábra Fali konzol szelvénye
A következőkben létrehozzuk a furatokat a konzol falhoz csatlakozó felületén. Ehhez jelöljük ki a kérdéses felületet szerkesztési síknak (A(1, 1) Sketch in place). Rajzoljunk két kört a furatoknak (A(3, 1) Center Edge), majd mére-tezzük be (Dimension, Modify Entity). Ezután „kifúrjuk” a furatokat (Extrude (Cut opció)).
19.3. ábra A furatok kivágása
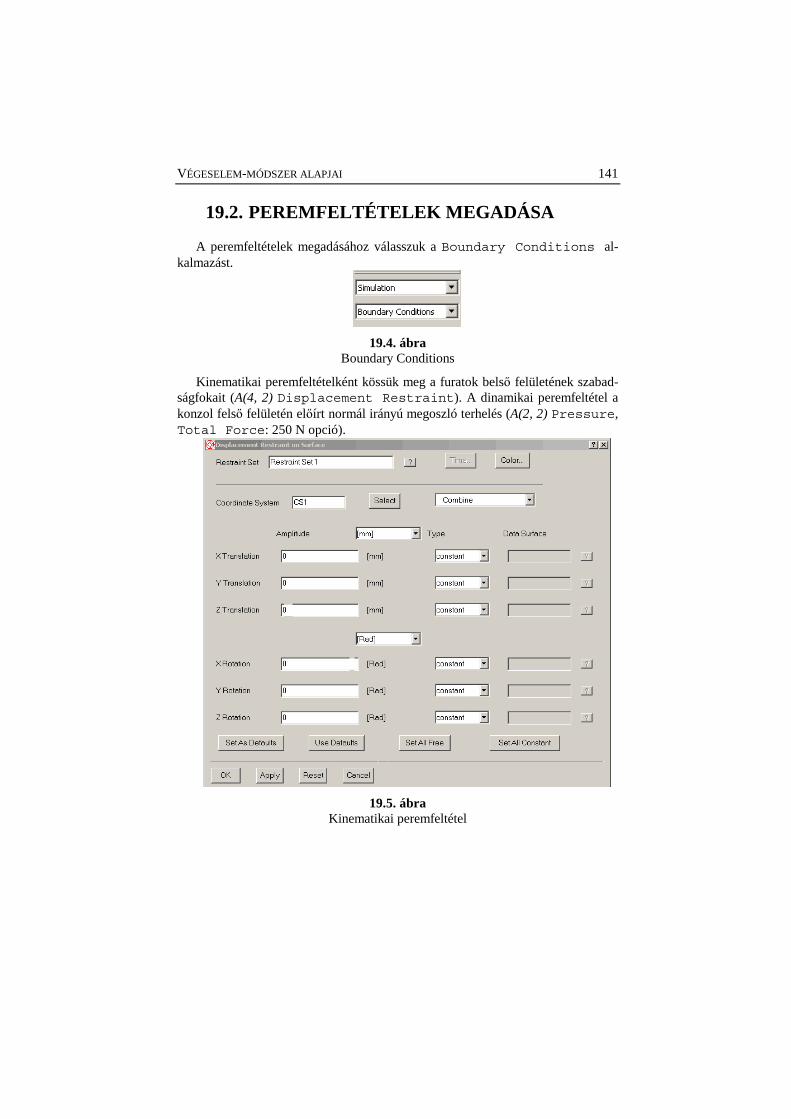
VÉGESELEM-MÓDSZER ALAPJAI 141
19.2. PEREMFELTÉTELEK MEGADÁSA
A peremfeltételek megadásához válasszuk a Boundary Conditions al-kalmazást.
19.4. ábra Boundary Conditions
Kinematikai peremfeltételként kössük meg a furatok belső felületének szabad-ságfokait (A(4, 2) Displacement Restraint). A dinamikai peremfeltétel a konzol felső felületén előírt normál irányú megoszló terhelés (A(2, 2) Pressure, Total Force: 250 N opció).
19.5. ábra Kinematikai peremfeltétel
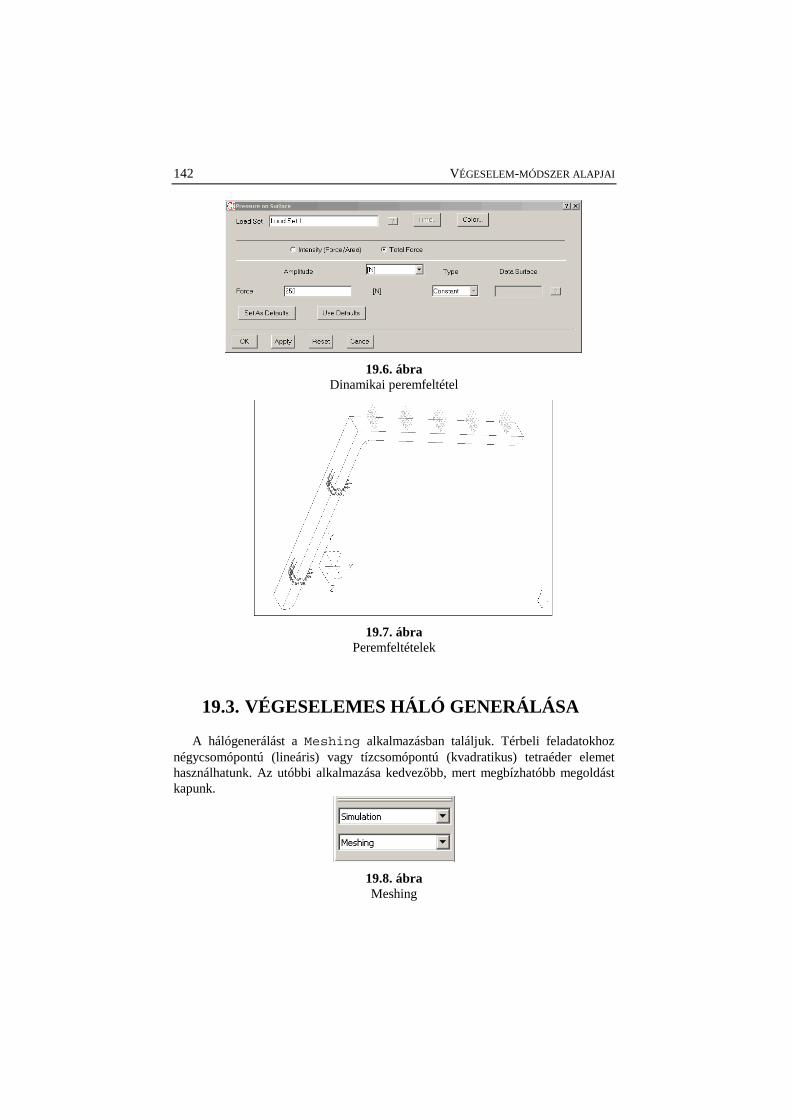
142 VÉGESELEM-MÓDSZER ALAPJAI
19.6. ábra Dinamikai peremfeltétel
19.7. ábra Peremfeltételek
19.3. VÉGESELEMES HÁLÓ GENERÁLÁSA
A hálógenerálást a Meshing alkalmazásban találjuk. Térbeli feladatokhoz négycsomópontú (lineáris) vagy tízcsomópontú (kvadratikus) tetraéder elemet használhatunk. Az utóbbi alkalmazása kedvezőbb, mert megbízhatóbb megoldást kapunk.
19.8. ábra Meshing
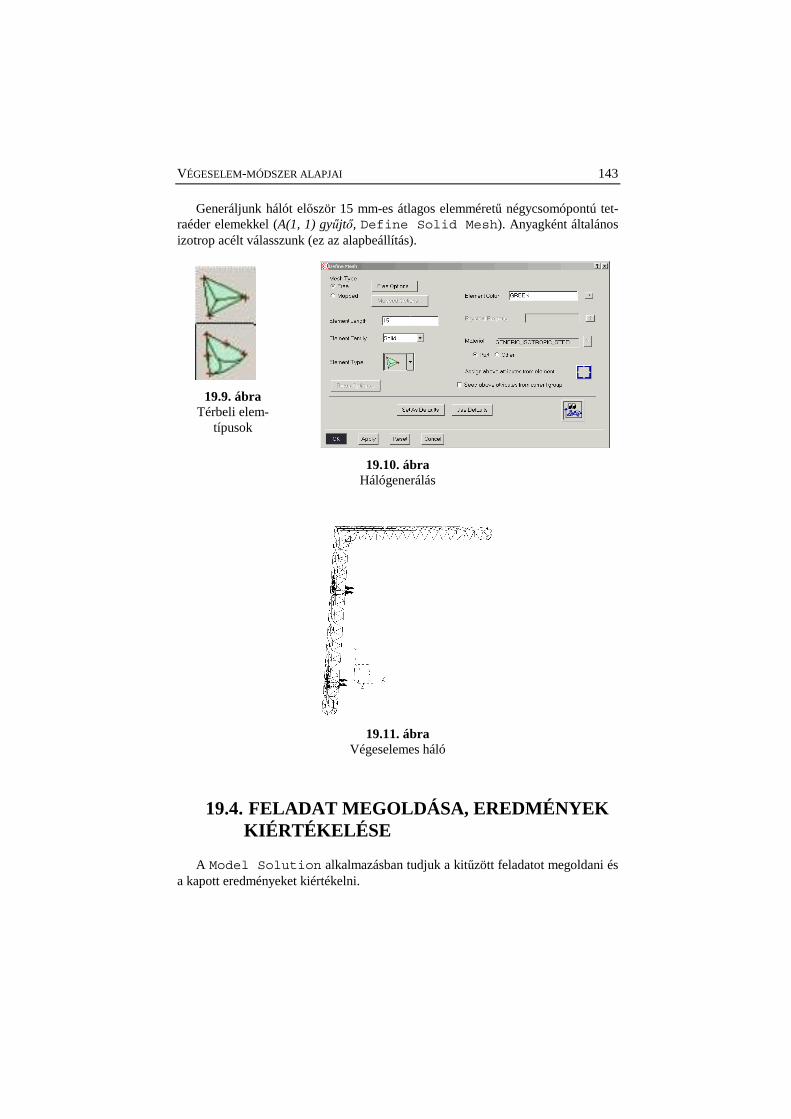
VÉGESELEM-MÓDSZER ALAPJAI 143
Generáljunk hálót először 15 mm-es átlagos elemméretű négycsomópontú tet-raéder elemekkel (A(1, 1) gyűjtő, Define Solid Mesh). Anyagként általános izotrop acélt válasszunk (ez az alapbeállítás).
19.10. ábra Hálógenerálás
19.11. ábra Végeselemes háló
19.4. FELADAT MEGOLDÁSA, EREDMÉNYEK KIÉRTÉKELÉSE
A Model Solution alkalmazásban tudjuk a kitűzött feladatot megoldani és a kapott eredményeket kiértékelni.
19.9. ábra Térbeli elem-
típusok
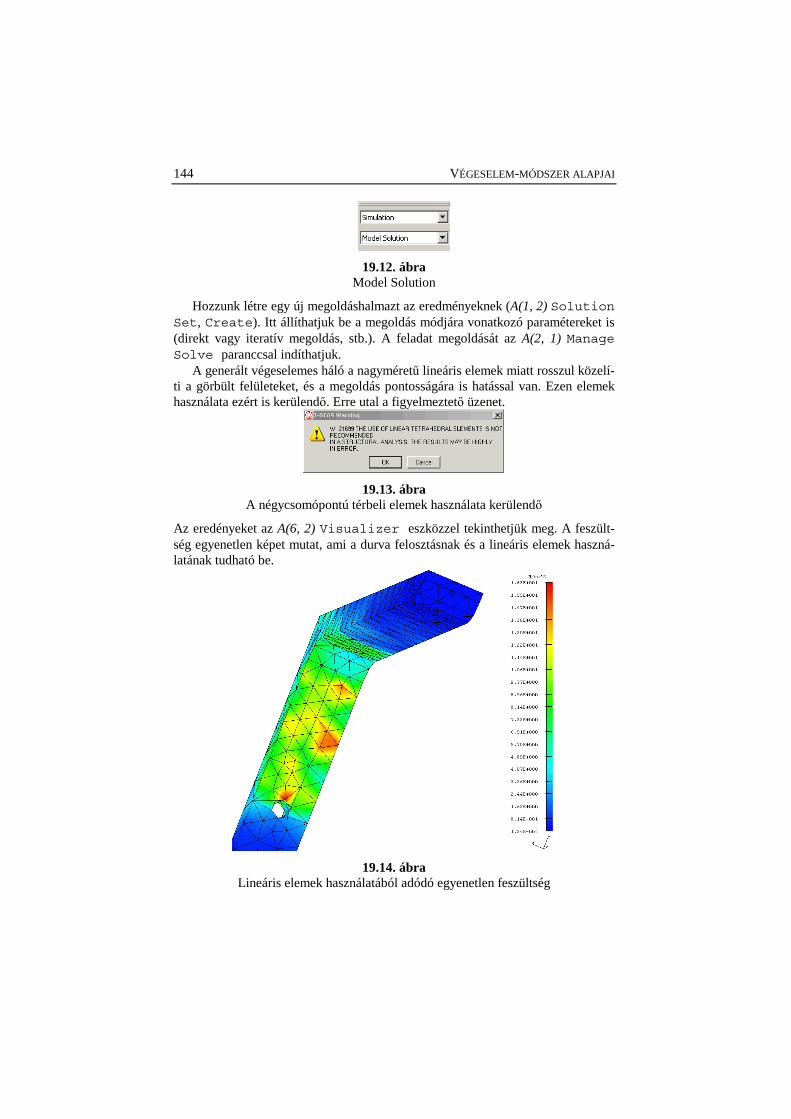
144 VÉGESELEM-MÓDSZER ALAPJAI
19.12. ábra Model Solution
Hozzunk létre egy új megoldáshalmazt az eredményeknek (A(1, 2) Solution Set, Create). Itt állíthatjuk be a megoldás módjára vonatkozó paramétereket is (direkt vagy iteratív megoldás, stb.). A feladat megoldását az A(2, 1) Manage Solve paranccsal indíthatjuk.
A generált végeselemes háló a nagyméretű lineáris elemek miatt rosszul közelí-ti a görbült felületeket, és a megoldás pontosságára is hatással van. Ezen elemek használata ezért is kerülendő. Erre utal a figyelmeztető üzenet.
19.13. ábra A négycsomópontú térbeli elemek használata kerülendő
Az eredényeket az A(6, 2) Visualizer eszközzel tekinthetjük meg. A feszült-ség egyenetlen képet mutat, ami a durva felosztásnak és a lineáris elemek haszná-latának tudható be.
19.14. ábra Lineáris elemek használatából adódó egyenetlen feszültség
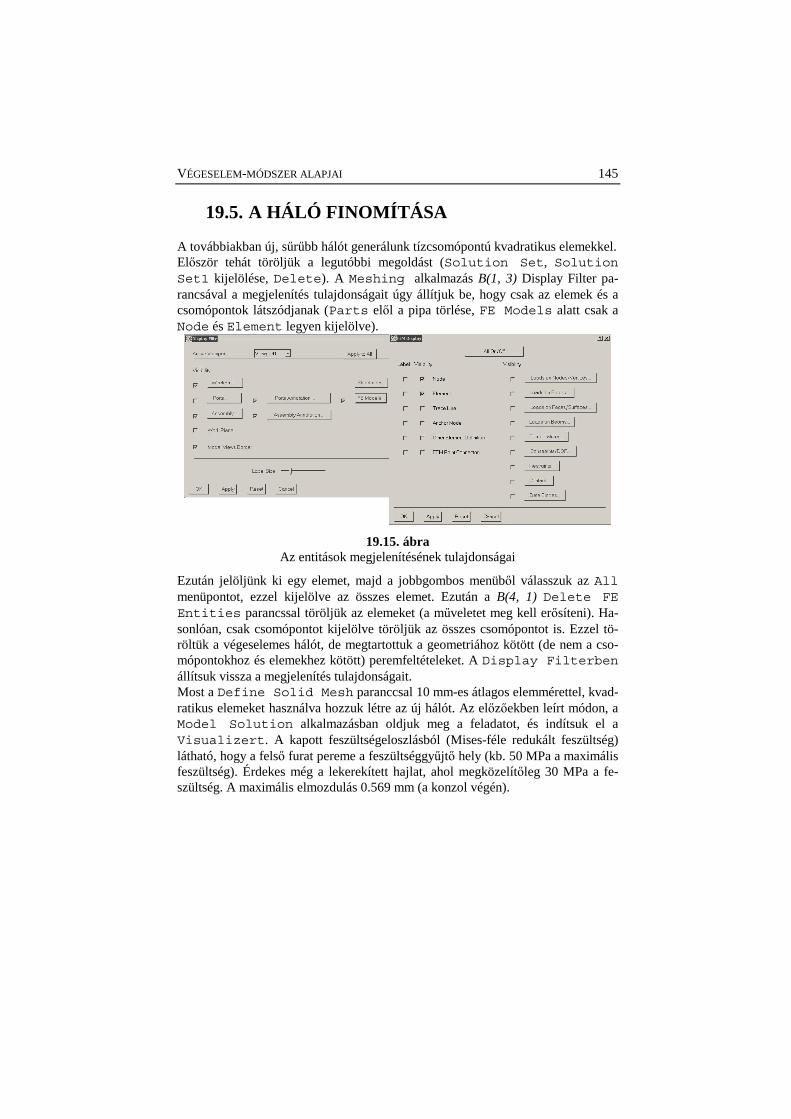
VÉGESELEM-MÓDSZER ALAPJAI 145
19.5. A HÁLÓ FINOMÍTÁSA
A továbbiakban új, sűrűbb hálót generálunk tízcsomópontú kvadratikus elemekkel. Először tehát töröljük a legutóbbi megoldást (Solution Set, Solution Set1 kijelölése, Delete). A Meshing alkalmazás B(1, 3) Display Filter pa-rancsával a megjelenítés tulajdonságait úgy állítjuk be, hogy csak az elemek és a csomópontok látszódjanak (Parts elől a pipa törlése, FE Models alatt csak a Node és Element legyen kijelölve).
19.15. ábra Az entitások megjelenítésének tulajdonságai
Ezután jelöljünk ki egy elemet, majd a jobbgombos menüből válasszuk az All menüpontot, ezzel kijelölve az összes elemet. Ezután a B(4, 1) Delete FE Entities parancssal töröljük az elemeket (a műveletet meg kell erősíteni). Ha-sonlóan, csak csomópontot kijelölve töröljük az összes csomópontot is. Ezzel tö-röltük a végeselemes hálót, de megtartottuk a geometriához kötött (de nem a cso-mópontokhoz és elemekhez kötött) peremfeltételeket. A Display Filterben állítsuk vissza a megjelenítés tulajdonságait. Most a Define Solid Mesh paranccsal 10 mm-es átlagos elemmérettel, kvad-ratikus elemeket használva hozzuk létre az új hálót. Az előzőekben leírt módon, a Model Solution alkalmazásban oldjuk meg a feladatot, és indítsuk el a Visualizert. A kapott feszültségeloszlásból (Mises-féle redukált feszültség) látható, hogy a felső furat pereme a feszültséggyűjtő hely (kb. 50 MPa a maximális feszültség). Érdekes még a lekerekített hajlat, ahol megközelítőleg 30 MPa a fe-szültség. A maximális elmozdulás 0.569 mm (a konzol végén).
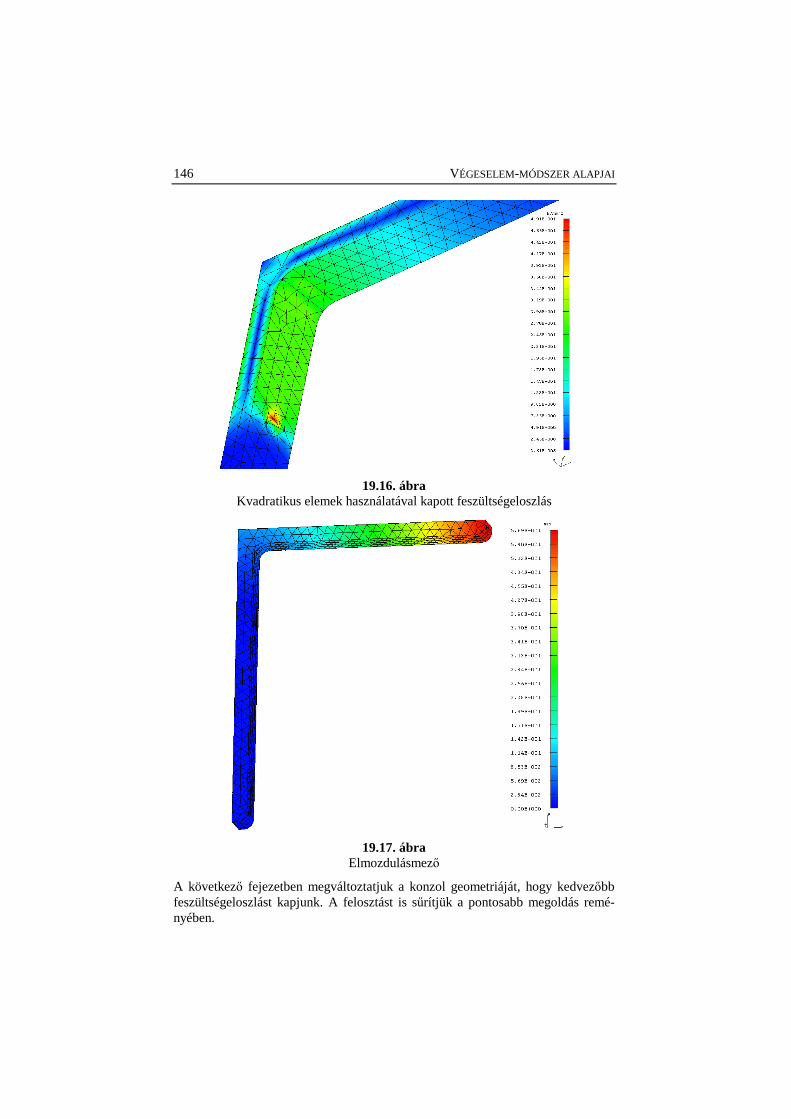
146 VÉGESELEM-MÓDSZER ALAPJAI
19.16. ábra Kvadratikus elemek használatával kapott feszültségeloszlás
19.17. ábra Elmozdulásmező
A következő fejezetben megváltoztatjuk a konzol geometriáját, hogy kedvezőbb feszültségeloszlást kapjunk. A felosztást is sűrítjük a pontosabb megoldás remé-nyében.
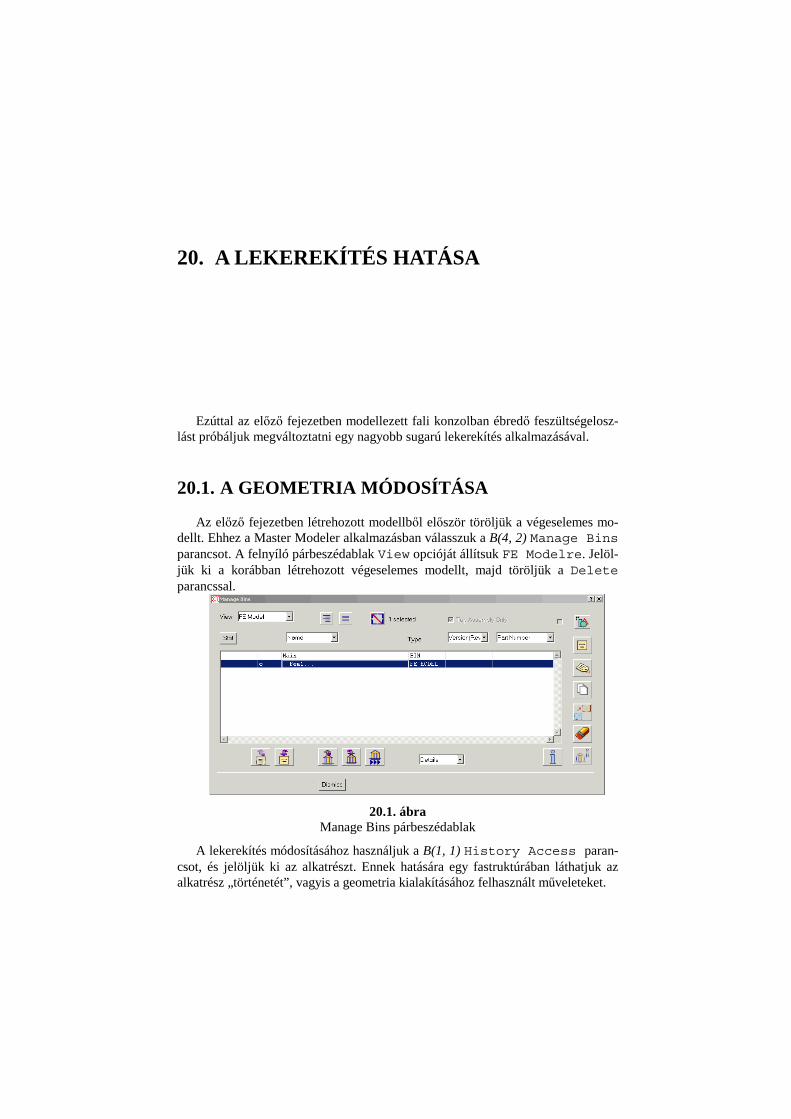
20. A LEKEREKÍTÉS HATÁSA
Ezúttal az előző fejezetben modellezett fali konzolban ébredő feszültségelosz-lást próbáljuk megváltoztatni egy nagyobb sugarú lekerekítés alkalmazásával.
20.1. A GEOMETRIA MÓDOSÍTÁSA
Az előző fejezetben létrehozott modellből először töröljük a végeselemes mo-dellt. Ehhez a Master Modeler alkalmazásban válasszuk a B(4, 2) Manage Bins parancsot. A felnyíló párbeszédablak View opcióját állítsuk FE Modelre. Jelöl-jük ki a korábban létrehozott végeselemes modellt, majd töröljük a Delete parancssal.
20.1. ábra Manage Bins párbeszédablak
A lekerekítés módosításához használjuk a B(1, 1) History Access paran-csot, és jelöljük ki az alkatrészt. Ennek hatására egy fastruktúrában láthatjuk az alkatrész „történetét”, vagyis a geometria kialakításához felhasznált műveleteket.
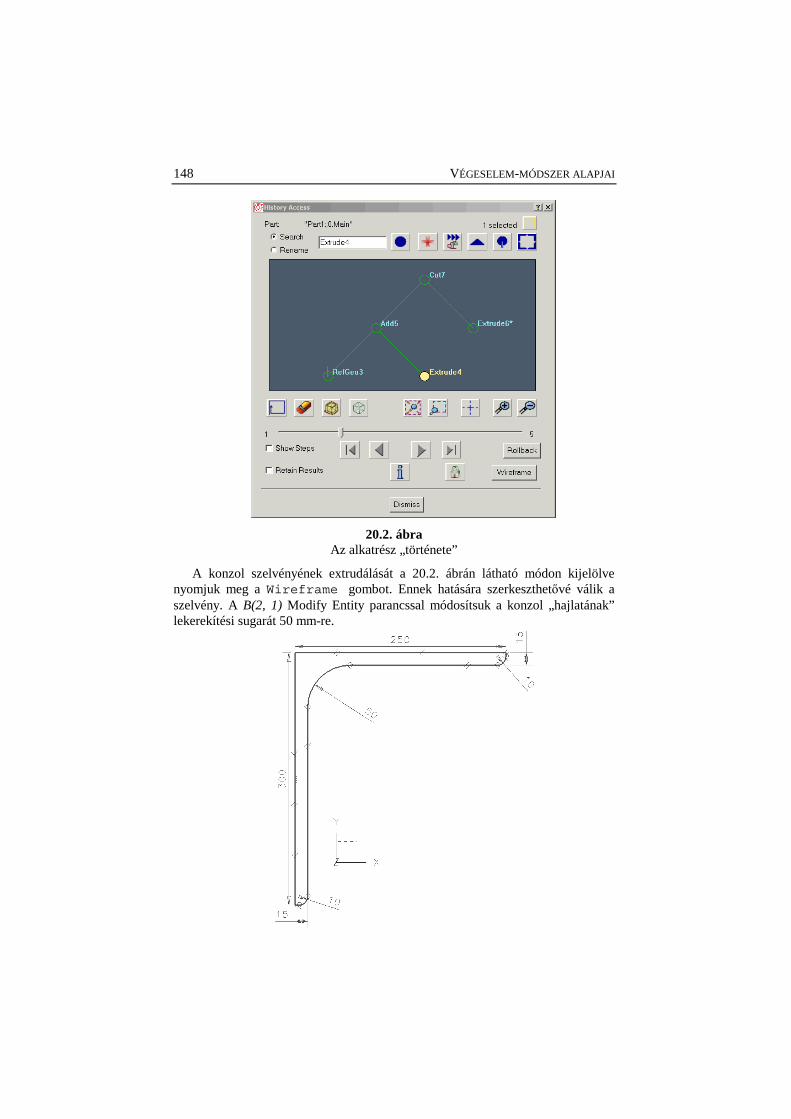
148 VÉGESELEM-MÓDSZER ALAPJAI
20.2. ábra Az alkatrész „története”
A konzol szelvényének extrudálását a 20.2. ábrán látható módon kijelölve nyomjuk meg a Wireframe gombot. Ennek hatására szerkeszthetővé válik a szelvény. A B(2, 1) Modify Entity parancssal módosítsuk a konzol „hajlatának” lekerekítési sugarát 50 mm-re.
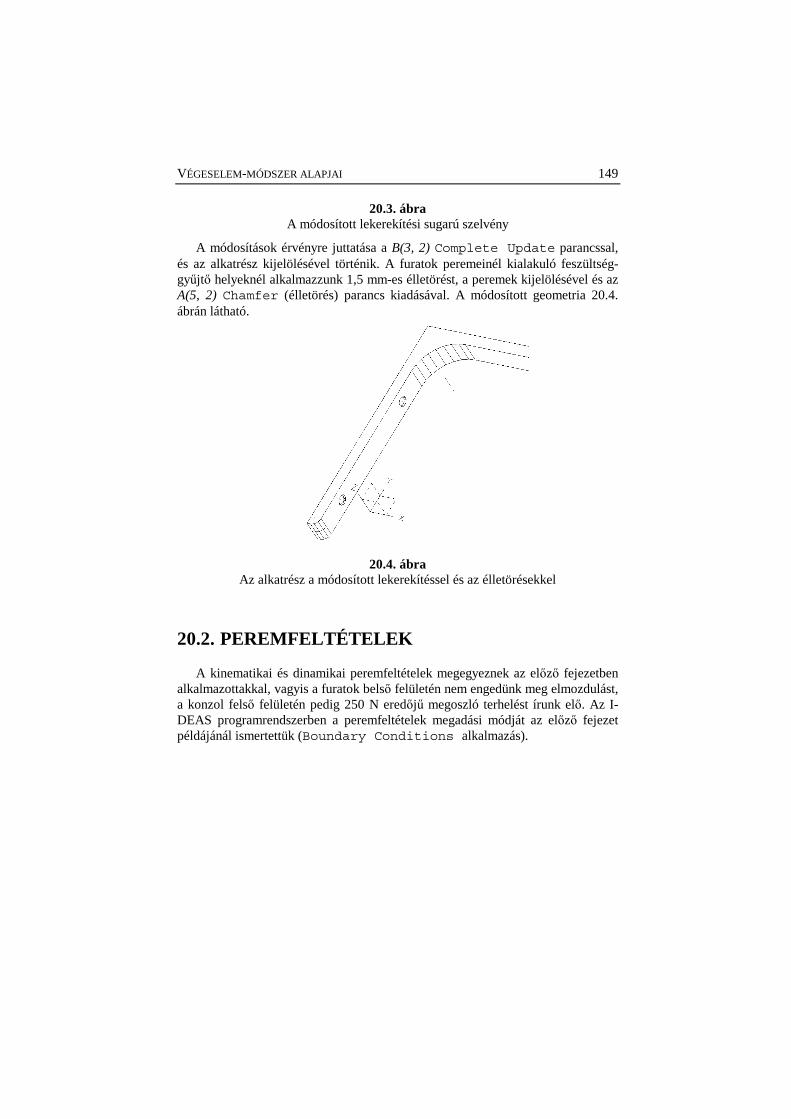
VÉGESELEM-MÓDSZER ALAPJAI 149
20.3. ábra A módosított lekerekítési sugarú szelvény
A módosítások érvényre juttatása a B(3, 2) Complete Update parancssal, és az alkatrész kijelölésével történik. A furatok peremeinél kialakuló feszültség-gyűjtő helyeknél alkalmazzunk 1,5 mm-es élletörést, a peremek kijelölésével és az A(5, 2) Chamfer (élletörés) parancs kiadásával. A módosított geometria 20.4. ábrán látható.
20.4. ábra Az alkatrész a módosított lekerekítéssel és az élletörésekkel
20.2. PEREMFELTÉTELEK
A kinematikai és dinamikai peremfeltételek megegyeznek az előző fejezetben alkalmazottakkal, vagyis a furatok belső felületén nem engedünk meg elmozdulást, a konzol felső felületén pedig 250 N eredőjű megoszló terhelést írunk elő. Az I-DEAS programrendszerben a peremfeltételek megadási módját az előző fejezet példájánál ismertettük (Boundary Conditions alkalmazás).
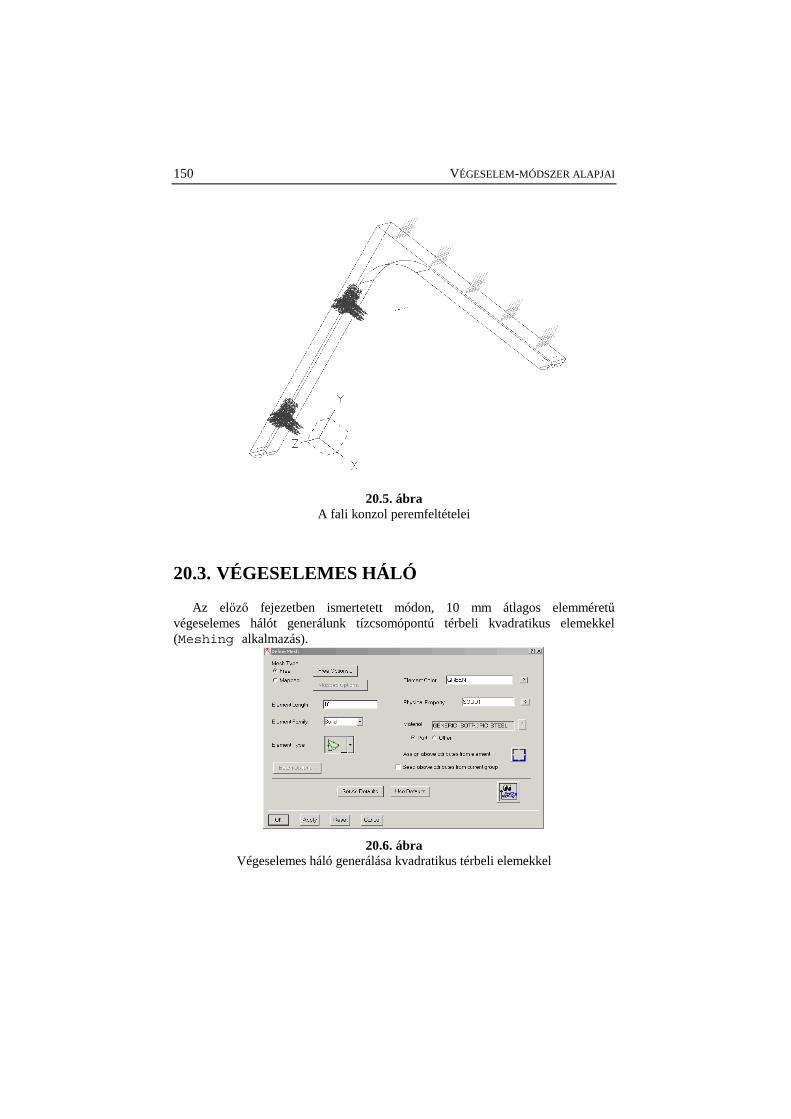
150 VÉGESELEM-MÓDSZER ALAPJAI
20.5. ábra A fali konzol peremfeltételei
20.3. VÉGESELEMES HÁLÓ
Az előző fejezetben ismertetett módon, 10 mm átlagos elemméretű végeselemes hálót generálunk tízcsomópontú térbeli kvadratikus elemekkel (Meshing alkalmazás).
20.6. ábra Végeselemes háló generálása kvadratikus térbeli elemekkel
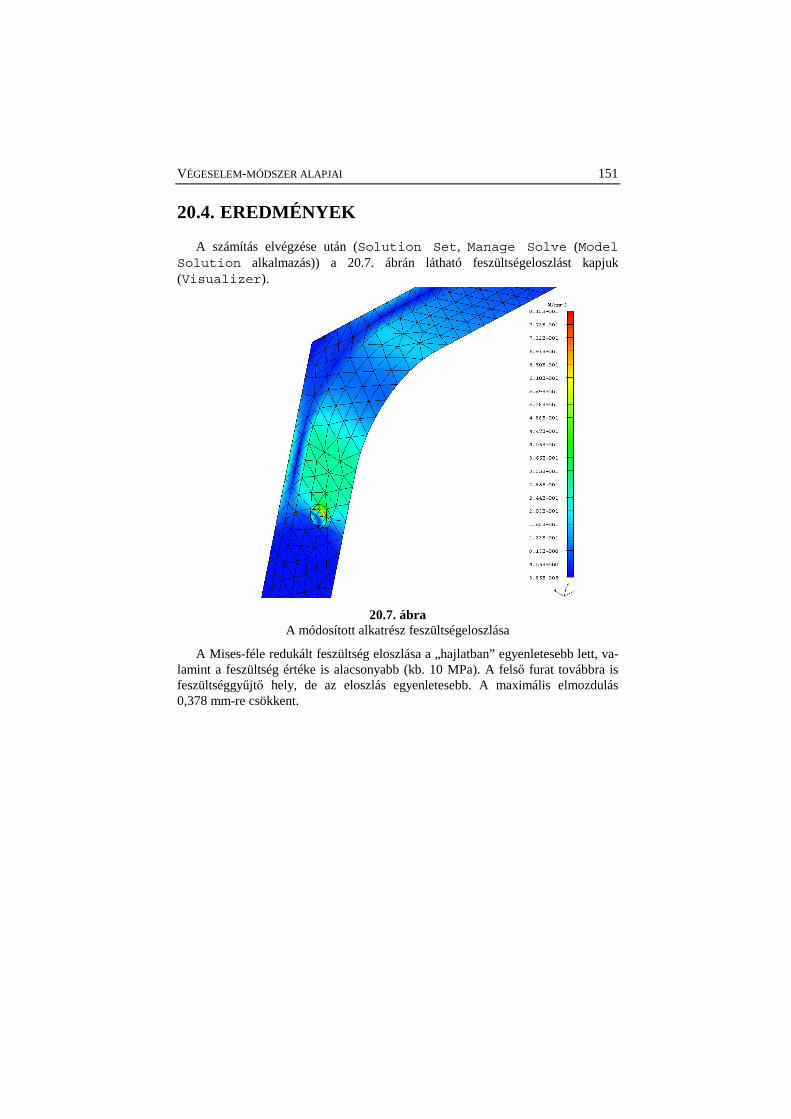
VÉGESELEM-MÓDSZER ALAPJAI 151
20.4. EREDMÉNYEK
A számítás elvégzése után (Solution Set, Manage Solve (Model Solution alkalmazás)) a 20.7. ábrán látható feszültségeloszlást kapjuk (Visualizer).
20.7. ábra A módosított alkatrész feszültségeloszlása
A Mises-féle redukált feszültség eloszlása a „hajlatban” egyenletesebb lett, va-lamint a feszültség értéke is alacsonyabb (kb. 10 MPa). A felső furat továbbra is feszültséggyűjtő hely, de az eloszlás egyenletesebb. A maximális elmozdulás 0,378 mm-re csökkent.
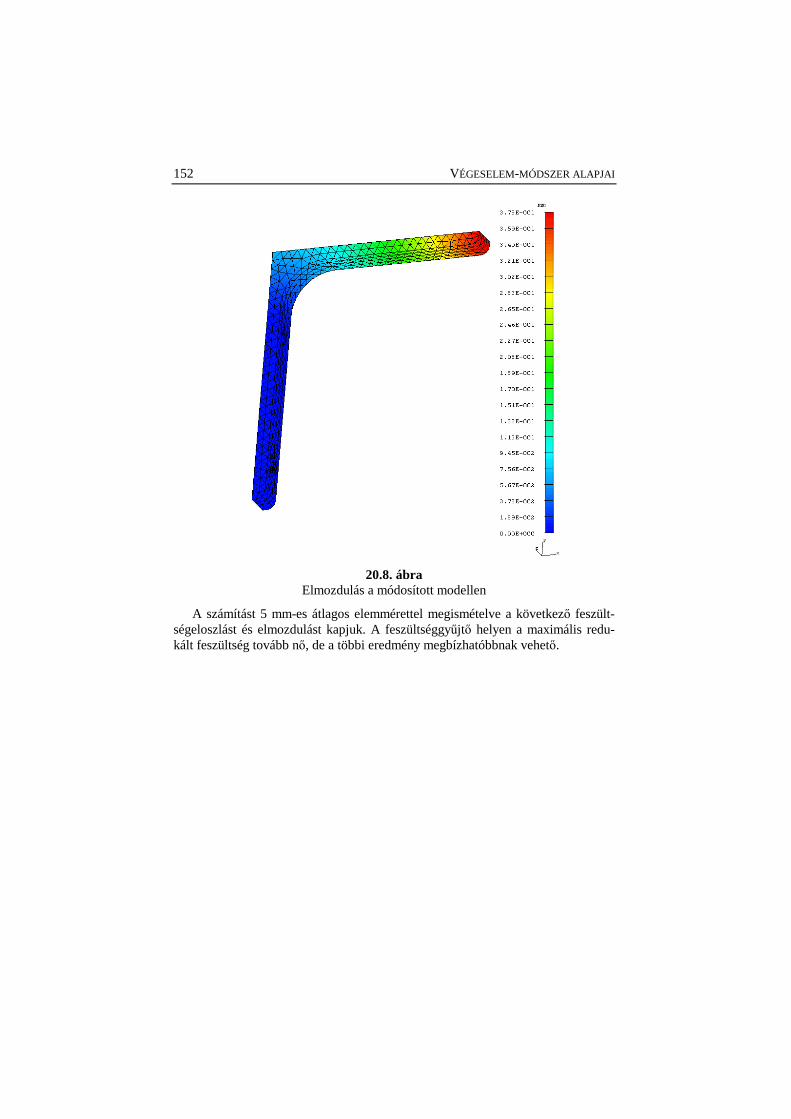
152 VÉGESELEM-MÓDSZER ALAPJAI
20.8. ábra Elmozdulás a módosított modellen
A számítást 5 mm-es átlagos elemmérettel megismételve a következő feszült-ségeloszlást és elmozdulást kapjuk. A feszültséggyűjtő helyen a maximális redu-kált feszültség tovább nő, de a többi eredmény megbízhatóbbnak vehető.
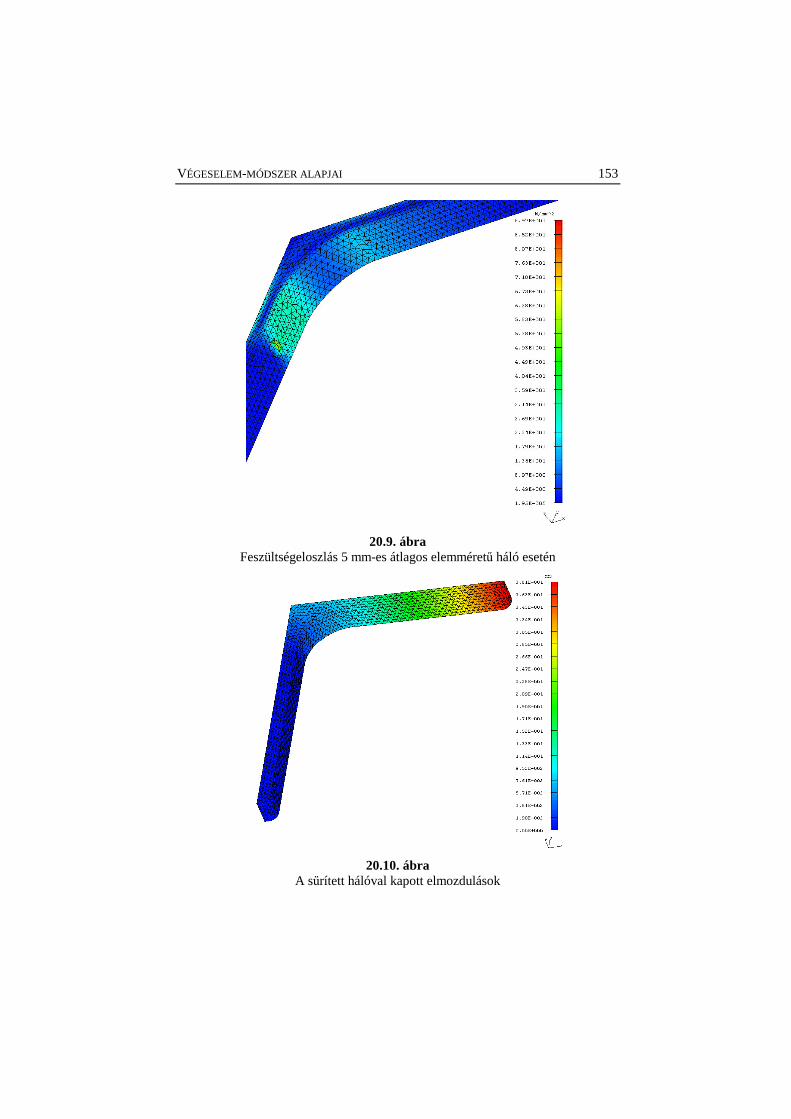
VÉGESELEM-MÓDSZER ALAPJAI 153
20.9. ábra Feszültségeloszlás 5 mm-es átlagos elemméretű háló esetén
20.10. ábra A sűrített hálóval kapott elmozdulások
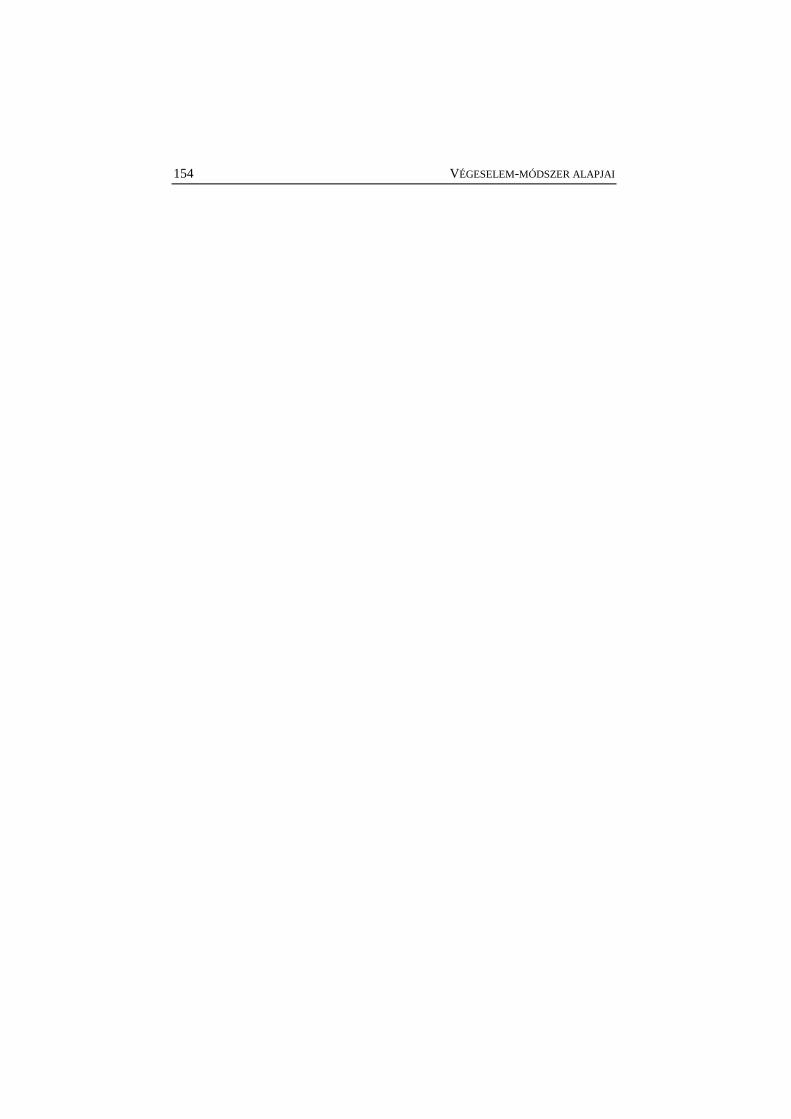
154 VÉGESELEM-MÓDSZER ALAPJAI
21. IRODALOMJEGYZÉK
[1] PÁCZELT I.: Végeselem-módszer a mérnöki gyakorlatban, I. kötet, Miskolci Egyetemi Kiadó, Miskolc, 1999.
[2] SZABÓ, B. BABUSKA,I.: Finite Element Analysis, John Wiley & Sons Inc., New York, 1991.
[3] BATHE, K.J.: Finite Element Procedures, Prentice-Hall, Inc., New Jersey, 1996.
[4] HUGHES, T.J.R.: The Finite Element Method Linear Static and Dynamic Finite Element Analysis, Dover Publications, Inc., Mineola, New York, 2000.
[5] I-DEAS Online Program dokumentáció, http://www.i-deas.hu





























