Embed Size (px)
Citation preview

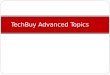
In actual construction, such as the reinforced concrete frame
shown in Figure 1, the members are idealized as lines which (usually)
coincide with the neutral axis of the members. However, this leads to
the creation of RIGID END ZONES, such as the beam
(connection) zones which are hatched in Figure 1.
The rigid end zones are modeled with rigid links, to account for
the fact that a part of the element length does not behave like a beam
or truss, but instead it remains RIGID.
how we can treat the existence of rigid end zones in frame members
(rigid end zones can be accounted for in the vast majority of analysis
programs in practice!). The first step is to establish the rigid end
ADVANCED TOPICS
1. Rigid end zones
In actual construction, such as the reinforced concrete frame
shown in Figure 1, the members are idealized as lines which (usually)
coincide with the neutral axis of the members. However, this leads to
the creation of RIGID END ZONES, such as the beam-to-
(connection) zones which are hatched in Figure 1.
Figure 1
The rigid end zones are modeled with rigid links, to account for
the fact that a part of the element length does not behave like a beam
or truss, but instead it remains RIGID. In the following, we will see
how we can treat the existence of rigid end zones in frame members
(rigid end zones can be accounted for in the vast majority of analysis
programs in practice!). The first step is to establish the rigid end
1
In actual construction, such as the reinforced concrete frame
shown in Figure 1, the members are idealized as lines which (usually)
coincide with the neutral axis of the members. However, this leads to
-column joint
The rigid end zones are modeled with rigid links, to account for
the fact that a part of the element length does not behave like a beam
owing, we will see
how we can treat the existence of rigid end zones in frame members
(rigid end zones can be accounted for in the vast majority of analysis
programs in practice!). The first step is to establish the rigid end

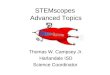
offset vectors for ends i and
vectors start from the nodal point and end in the point which marks
the beginning of the deformable beam member, as shown in Figure 2.
Thus, we have two vectors: [dx
ends at point i, and [dx
point j. The key now is to express the displacements (translations along
x and y and rotations about z) at ends j and j as functions of the
displacements at nodes 1 and 2, respectively.
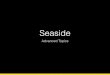
dimensional end displacement and end force vectors corresponding to
the nodal points and to the
member (which has a length equal to L), as shown in Figure 3.
offset vectors for ends i and j, in the local coordinate system. These
vectors start from the nodal point and end in the point which marks
the beginning of the deformable beam member, as shown in Figure 2.
Figure 2
Thus, we have two vectors: [dx1 dy1]T which starts from node 1 and
point i, and [dx2 dy2]T which starts from node 2 and ends at
point j. The key now is to express the displacements (translations along
x and y and rotations about z) at ends j and j as functions of the
displacements at nodes 1 and 2, respectively. Let us establish the 6
dimensional end displacement and end force vectors corresponding to
l points and to the points defining the flexible part of the
which has a length equal to L), as shown in Figure 3.
2
j, in the local coordinate system. These
vectors start from the nodal point and end in the point which marks
the beginning of the deformable beam member, as shown in Figure 2.
which starts from node 1 and
which starts from node 2 and ends at
point j. The key now is to express the displacements (translations along
x and y and rotations about z) at ends j and j as functions of the
us establish the 6-
dimensional end displacement and end force vectors corresponding to
points defining the flexible part of the
which has a length equal to L), as shown in Figure 3.

From rigid body kinematics (and
if points 1 and i are connected by the rigid link shown in Figure 2, then
we have:
Figure 3
From rigid body kinematics (and small rotations), it can be proved that,
if points 1 and i are connected by the rigid link shown in Figure 2, then
3
small rotations), it can be proved that,
if points 1 and i are connected by the rigid link shown in Figure 2, then

4
If we sum the contributions from cases (1)-(3), we obtain:
( )
( )
( )
( )
( )
( )
1 i 1 11
12 i 2 1
3 i 3 1
' '1 0 dy
' 0 1 dx '
0 0 1' '
∆ ∆− ∆ = ∆ ∆ ∆
Similarly, we can obtain:
( )
( )
( )
( )
( )
( )
4 j 4 22
25 j 5 2
6 j 6 2
' '1 0 dy
' 0 1 dx '
0 0 1' '
∆ ∆− ∆ = ∆ ∆ ∆
Combining the two matrix equations, we obtain:
( ){ } [ ] ( ){ }REZij 12' ' '∆ = Γ ∆ (1), where
( ){ }
( )
( )
( )
( )
( )
( )
1 i
2 i
3 i
ij
4 j
5 j
6 j
'
'
''
'
'
'
∆ ∆ ∆
∆ = ∆ ∆ ∆
, ( ){ }
( )
( )
( )
( )
( )
( )
1 1
2 1
3 1
12
4 2
5 2
6 2
'
'
''
'
'
'
∆ ∆ ∆
∆ = ∆ ∆ ∆
and [ ]
1
1
REZ
2
2
1 0 dy 0 0 0
0 1 dx 0 0 0
0 0 1 0 0 0'
0 0 0 1 0 dy
0 0 0 0 1 dx
0 0 0 0 0 1
−
Γ = −
If we take equilibrium of forces with appropriate cuts, we will realize
that [Γ’REZ] defines a contragradient pair of transformations, that is,
we have:

5
( ){ } [ ] ( ){ }T
REZ12 ijF' ' F '= Γ (2)
The (6x6) stiffness matrix [k’] that we defined for a frame member
connects the forces ( ){ }ijF' to the displacements ( ){ }ij
'∆ . Since the
member is connected with the rest of the structure at the nodes, we
must find a stiffness matrix which connects the nodal forces ( ){ }12F' to
the displacements ( ){ }12'∆ .
From Equation (2), we have: ( ){ } [ ] ( ){ } [ ] [ ] ( ){ }T T
REZ REZ12 ij ijF' ' F ' ' k' ∆ '= Γ = Γ
And if we account for equation (1):
( ){ } [ ] [ ][ ] ( ){ } ( ){ } ( ){ }T
REZ REZ12 12 12 12F' ' k' ' ∆ ' F ' k' ∆ ' = Γ Γ → =
ɶ
where [ ] [ ][ ]T
REZ REZk' ' k' ' = Γ Γ ɶ .
The last remaining part is to conduct the coordinate transformation, so
that we obtain the stiffness matrix in the global coordinate system,
for a member with rigid end zones:
[ ] [ ] [ ]T
RΟΤ RΟΤk k' = Γ Γ ɶ
And then we can proceed with the global stiffness matrix assembly,
etc.
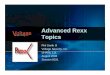
Note that another approach, would be to establish the rigid end offset
vectors in the global coordinate system, [dX1 dY1]T and [dX2 dY2]
T, as
shown in Figure 4.

In this case, the rigid
the stiffness matrix AFTER the coordinate transformation, in other
words, after we define the rigid
global coordinate system,
the member stiffness matrix in the global coordinate system for the
member rigid end zones as follows:
[ ]k k'= Γ Γ Γ Γ
The bottom line is,
we need to establish the member global stiffness matrix corresponding
to forces and displacements at the NODAL POINTS to which the
member is connected with the rest of the structure.
Figure 4
In this case, the rigid-end transformation must be conducted to
the stiffness matrix AFTER the coordinate transformation, in other
words, after we define the rigid-end zone transformation vector in
global coordinate system, [ ]
1
1
REZ
2
2
1 0 dΥ 0 0 0
0 1 dΧ 0 0 0
0 0 1 0 0 0
0 0 0 1 0 dΥ
0 0 0 0 1 dΧ
0 0 0 0 0 1
−
Γ = −
, we then obtain
the member stiffness matrix in the global coordinate system for the
member rigid end zones as follows:
[ ] [ ] [ ][ ]( )[ ]T T
RΕΖ RΟΤ RΟΤ RΕΖk k'= Γ Γ Γ Γ
The bottom line is, that if we have rigid-end zones in a member,
we need to establish the member global stiffness matrix corresponding
to forces and displacements at the NODAL POINTS to which the
member is connected with the rest of the structure. After we solve,
6
end transformation must be conducted to
the stiffness matrix AFTER the coordinate transformation, in other
end zone transformation vector in the
, we then obtain
the member stiffness matrix in the global coordinate system for the
end zones in a member,
we need to establish the member global stiffness matrix corresponding
to forces and displacements at the NODAL POINTS to which the
After we solve,

7
we can obtain the member end displacements (at the end points of the
deformable part, i and j) as follows:
( ){ } [ ] ( ){ } [ ][ ][ ]{ }REZ REZ RΟΤ bij 12' ' ' ' A U∆ = Γ ∆ = Γ Γ , or
( ){ } [ ] ( ){ } [ ][ ][ ]{ }ROT RΟΤ REZ bij ij' A U∆ = Γ ∆ = Γ Γ
and of course, the basic member deformation can be obtained using the
equation: { } [ ] ( ){ }RBM ij' '∆ = Γ ∆ , from which we can obtain the basic element
forces, etc.
2. Elastic supports
Another common occurrence in practice is that of elastic supports or
spring supports. That is, the reaction force at a point is equal to a
spring constant, ks, times the corresponding displacement. For truss
structures, we have elastic supports only for translational degrees of
freedom, while for frame structures we have elastic supports for both
translational and rotational degrees of freedom. The elastic constant
of a translational spring, kst, gives the reaction force for a unit
translation of the support, while the elastic constant of a rotational
spring, ksφ, gives the reaction moment per unit rotation of the support.
Elastic supports are commonly used for the analysis of actual
buildings, to account for the compliance (flexibility) of the soil on
which the structure transfers its loads through the foundation. For

8
example, all three degrees of freedom at node 4 of the structure
shown in Figure 5 are supported with elastic supports.
Figure 5
The way in which we can treat elastic supports is actually quite
straightforward. First of all, the degrees of freedom that are
supported with spring supports are FREE degrees of freedom. Thus,
the numbering of the degrees of freedom (free DOF first)
corresponding to the structure shown in Figure 5 can be established as
shown in Figure 6:
Figure 6
X
Y
z(1)
(2)
(3)
1
2 3
4ksX
ksY
ksφ

Based on the above, the free and restrained DOF
Figure 6 are:
Now, we assemble the global stiffness matrix, completely ignoring the
existence of the spring supports. For example, the global stiffness
matrix corresponding to the
Finally, the effect of the spring supports is accounted for using the
following rule:
“If the DOF m is supported by a spring which has constant k
we add ks to the (m,m) element of the global stiffness matrix
Thus, for the structure in Figure
corresponding to the free DOF and accounting for the existence of the
spring supports is the following:
he free and restrained DOF for the structure in
Now, we assemble the global stiffness matrix, completely ignoring the
existence of the spring supports. For example, the global stiffness
matrix corresponding to the free DOF will be:
Finally, the effect of the spring supports is accounted for using the
is supported by a spring which has constant k
) element of the global stiffness matrix
he structure in Figure 6, the final global stiffness matrix
corresponding to the free DOF and accounting for the existence of the
spring supports is the following:
9
for the structure in
Now, we assemble the global stiffness matrix, completely ignoring the
existence of the spring supports. For example, the global stiffness
Finally, the effect of the spring supports is accounted for using the
is supported by a spring which has constant ks, then
) element of the global stiffness matrix”.
, the final global stiffness matrix
corresponding to the free DOF and accounting for the existence of the

10