Embed Size (px)
Citation preview

Application of genetic algorithms to fault diagnosis innuclear power plants
Zhou Yangping, Zhao Bingquan* , Wu DongXin
Institute of Nuclear Energy Technology, Tsinghua University, Beijing 100084, People’s Republic of China
Received 22 June 1999; accepted 11 September 1999
Abstract
A nuclear power plant (NPP) is a complex and highly reliable special system. Without expert knowledge, fault confirmation in the NPP canbe prevented by illusive and real-time signals. A new method of fault diagnosis, based on genetic algorithms (GAs) has been developed toresolve this problem. This NPP fault diagnosis method combines GAs and classical probability with an expert knowledge base. By assessingthe state of the NPP, the GA colony undergoes a transformation that produces an individual adapted to the NPP’s condition. Experimentsperformed on the 950 MW full size simulator at the Beijing NPP simulation training center show that this method has comparativeadaptability to diagnose signals and faults changed with time, imperfect expert knowledge, illusive signals and other phenomena.q 2000Elsevier Science Ltd. All rights reserved.
Keywords: Fault diagnosis; Genetic algorithms; Knowledge base
1. Introduction
With the growing size and complexity of nuclear plants,the understanding of system problems and trouble-shootingposes challenges to the operating staff. In order to help theplant operators to quickly identify the problem, performdiagnosis and initiate recovery actions ensuring the safetyof the plant, many operator support systems or/and diagno-sis systems [1–5] are developed. Most of them utilizevarious diagnosis methodologies and have comparablecapabilities to diagnose faults. By combining the signalsfrom an operating plant with expert knowledge, fault diag-nosis involves analyzing the state of NPP to obtain the fault.Some systems (e.g. [1]) are based on logic reasoning meth-ods. An alarm annunciation system is used to proceed thediagnosis reasoning [2,3]. An approach using artificialneural networks (ANNs) has been applied for the develop-ment of a diagnosis system [4,5].
Genetic algorithm [6–8] (GA) is a heuristic inversionmethod. It progresses the search not blindly but purpose-fully. This method can solve large-scale and multi-variablenon-linearity inversion problems. GAs can also be used todiagnose faults in other systems. Some works [9–12] showthat GAs can deal with the multi-fault, real-time signals and
other difficulties in a large-scale system. GAs mimic someof the processes of natural evolution. In doing so, someinherent features of natural evolution are utilized infields far beyond genetics. However, is it not necessaryfor GAs as we use them to mimic in detail the behaviorof the evolutionary process? Indeed, users are free toutilize those features that are useful and discard aspectsthat seem unimportant in their applications. Sincenormal evolutionary processes are quite slow, biasedby reproduction, and based on an aggressive “survivalof the fittest” philosophy, this is necessary to speed upthe evaluation process.
We developed a method of fault diagnosis based on theGAs. By using the knowledge base, we combine GAs, clas-sical probability and characteristic fault diagnosis proce-dures for a NPP. In the process of fault diagnosis, thismethod contacts the state of NPP with a GA colony andtransforms the colony to obtain the individual that adaptsto the NPP’s condition. On the 950 MW full size simulatorin the Beijing NPP simulation training center, experimenta-tion shows this individual has comparative adaptability toimperfect expert knowledge, illusive signals and otherphenomena [13,14].
Fault diagnosis in the NPP can be thought as aprocess of inversion. SupposeS� P
si ; where S is aset of signals obtained from the operating NPP, andC � P
ci ; where C is the state of the NPP.S is
Reliability Engineering and System Safety 67 (2000) 153–160
0951-8320/00/$ - see front matterq 2000 Elsevier Science Ltd. All rights reserved.PII: S0951-8320(99)00061-7
www.elsevier.com/locate/ress
* Corresponding author. Fax:186-10-6277-1150.E-mail address:[email protected] (Z. Bingquan).

known and C is not. We considerC and S have therelation: S� g�C�: We denote theg21( ) as some rela-tionship whereS goes toC. The problem to be resolvedis how to getC through g21( ).
In principle, C can be replaced by whether each part ofNPP is normal or not. By enumerating all of the possiblefaults,C � F � P
fi can be obtained,fi denotes the state ofthe ith fault, and therefore
Pfi � g21�P si�: Sincef, g ands
are time dependent, it can be expressed thatP
fi�t� �g21�P si�t��: We can use strings of GAs to simulateF. Forexample, the fault has two states (occur or not occur), hencea BOOL string can be used to simulate it. For example,string 100010 shows the 1st, the 5th faults occur and otherfaults do not. According to the signals and the knowledgebase, we can calculate the fitness of every string and evolvethese strings with the process of GAs. When the evolution-ary process of the GAs is complete, we analyze the finalstrings and get the fault of the NPP.
In the process of diagnosis, the strings change with thesignals through the GAs. By the processes of crossover,mutation and selection, the strings contain the varied faultinformation of every signal in the knowledge base. Faultdiagnosis using GAs leads to a progressive result, not deter-mined by the flashy signals. Since the course of diagnosis isbased on all of the signals in the NPP, the method hascomparative adaptability to illusive signals. At the sametime, using the GAs to simulate the fault diagnosis canovercome the difficulty of signals and faults changingwith time.
2. Process and technique
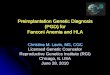
The flow chart of the diagnosis process is shown in Fig. 1.The whole process can be divided into two courses. The firstcourse (real line part of Fig. 1) is the main course thatinvolves creation of the colony by reproduction, crossover,mutation and the survival of the individuals with betterfitting characteristics. The second course (broken line partof Fig. 1) uses the knowledge base to analyze the signals, togenerate all kinds of parameters and operators, and torestrict the first course.
2.1. Encode genes
Supposing the total number of system faults isn, hencethe length of every individual string isn bits. When thevalue of some bit is 1, it means the corresponding faulttakes place. Otherwise, the fault does not take place. In anormal case, we encode the genes of colony based on theinitial probability. If the initial probability of a fault isbigger than that of others, the corresponding site of an indi-vidual string has more chances to be 1.
2.2. Generate initial colony
When a fault (initial event) occurs, it may bring on otherfaults (non-initial event). Supposing there are three faults(initial event and non-initial event), we can see there are C3
n
possible instances. In order to fulfil the limit of diagnosistime and avoid failing to initialize (the initial colony does
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160154
Fig. 1. Process of fault diagnosis.

not include the fault of the system), we suppose that thenumber of an individual string is 1000 and that there are10 bits of 1 in each individual string. In this way, the prob-ability of failing to initialize is about��n 2 1�=n�10000
; whichis very small whenn is not very big. For example, whenn is500, the probability is about 2:020× 1029
:
2.3. Calculate fitness
The fitness magnitude of individual string shows howwell the individual fits the environment. Here it shows thesupport that the signals and knowledge base offer. The rela-tionship between the signals and knowledge base consists ofthe support of signals to the faults and the feedback of faultsto the signals. When an abnormal signal appears, it is possi-ble that one initial event happens. Sometimes, the appear-ance of an abnormal signal relates many initial events. We
construct these initial events as an initial secondary base.Table 1 is the secondary base of “flow rate of steam line Abecoming low”. The first part is the symbol of the initialevent and the third part is the probability of the initial event.When one initial event happens and its expected signals donot meet the actual signals, it is possible that one or morenon-initial events happen. We construct this information asa non-initial secondary base. Table 2 is the secondary baseof “level of hot well becoming high unexpectedly”. The firstpart is the symbol of the initial event, the second part is thesymbol of the initial event, and the third part is the prob-ability of this instance. When an event happens, somesignals should change and some signals should not. Wecompare the feedback of the fault represented by the stringwith the actual signals, if they are coincident, the fitness ofthe string should become high, otherwise, it should becomelow.
Overall, the fitness of the string is affected by initialinformation base, the non-initial information base and thefeedback of the faults. In addition, we need to adjust thefitness of the string in order to satisfy some special needs(for example, avoid the local optimum). The fitness functionis given as below:
Fj � Ij ·Sj·Nj·Aj �1�
The reason for using the multiplicative is because weconsider the initial information base, the non-initial infor-mation base and the feedback of the faults to have the sameeffect on the fault diagnosis. In the actual application, resultsshow this is reasonable.
Ij is the effect of initial event on the fitness of thejthstring. j is the serial number of the string.
Ij �Xni�1
��Xmk�1
Iik�·di 1 �1 2 di�·ulg Pi u� �2�
Here,di is the bit value of a string’sith bit, Iik is the prob-ability that thekth signal connects to theith fault in initialknowledge base,Pi is the initial probability of theith fault(herePi is about 102n �2 , n , 7�; in the normal case, if theinitial probability of the fault is larger than that of another,the corresponding bit has more probability to be zero),m isthe serial number of the signals, andn is the serial number ofthe faults in the system.
Sj is the feedback that the fault gives
Sj �Xni�1
�di ·Xmk�1
Sk� �3�
Here,Sk is the feedback value which theith fault gives to thekth signal. If thekth signal coincides with the actual signal,Sk is positive, otherwise it is negative. According to thestage whether they are coincident or non-coincident,Sk ischanged.
Nj is the effect of a non-initial event on the fitness of
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160 155
Table 1A secondary initial knowledge base
Symbol Description Probability
CPAFO Condensate pump A fails off 0.6CPBFO Condensate pump B fails off 0.6FPLCLRP Failures in primary loop cause
low reactor power1
FPLCTR Failures in primary loop causeturbine runback
1
LOTL Decrease of turbine load 0.7MFPAFO Main feedwater pump A fails off 0.6MFPBFO Main feedwater pump B fails off 0.6MSIVAC Main isolation valve MSIVA
fails closed1
PT446FH Sensor PT446 fails in giving highturbine pressure signal
1
SGVFC Some of GV valves fail closed 1STVFC Some of TV valves fail closed 1TRSGA Tube ruptures in steam generator
A0.3
TRSGB Tube ruptures in steam generatorB
0.8
TRSGC Tube ruptures in steam generatorC
0.8
V1FC Valve V1 fails closed 0.6V11FC Valve V11 fails closed 0.5V2FC Valve V2 fails closed 0.6V26FC Valve V26 fails closed 0.6V3FC Valve V3 fails closed 0.6V4FC Valve V4 fails closed 0.6V12FC Valve V12 fails closed 0.5V13FC Valve V13 fails closed 0.5V27FC Valve V27 fails closed 0.5V28FC Valve V28 fails closed 0.5TRF478L Valve FCV478 is abnormally in
low position0.3
TRF488L Valve FCV488 is abnormallyfrozen
0.3
TRF498L Valve FCV498 is abnormally inlow position
0.3
V21FO Valve V21 fails open 0.8V22FO Valve V22 fails open 0.8V31FO Valve V31 fails open 0.8

individual strings.
Nj �X
l
Xp
��dl ·dp�·Nlp� �4�
dl is the bit value of a string’slth bit anddp is the bit value of
a string’spth bit. Nlp denotes the non-initial probability ofthe lth fault (initial event) and thepth fault (non-initialevent) in non-initial knowledge base.
Aj is an adjustment to the fitness of thejth string. Asmentioned above, we can obtain the fitness of thejth indi-vidual string.
Fj � �Xni�1
��Xmk�1
Iik�·di
1�1 2 di�·ulg Pi u��·Xni�1
�di ·Xmk�1
Sk�·�X
l
Xp
��dl ·dp�·Nlp��·Aj
�5�In order to validate the rationality of the fitness function, weuse the signals generated by the simulator and knowledgebase to calculate the fitness of some imaginary strings.
In every signal cycle, the string representing the precon-certed single fault has the largest fitness of all strings, whichrepresent every single fault. Even when we change the regu-lar signals or the knowledge base, the string representing thepreconcerted single fault has the largest fitness in mostsignal cycles. According to the fitness function, this situa-tion can extend to multi-fault diagnosis. This shows that thegenetic algorithm has comparative adaptability to imperfectexpert knowledge and illusive signals.
2.4. Crossover, mutation and selection
The principia of crossover, mutation and selection areshown in Table 3. There are different requirements invarious phases of the diagnosis.
2.5. Termination of diagnosis
In the end phase of a fault diagnosis, when there areenough signals, we can conclude that the diagnosis hasbeen determined if: (1) the fitness of a string reaches thepreconcerted value or, (2) difference of average fitness inseveral continuous colonies and the difference of strings inevery colony are less than the preconcerted value. In case(1), we get the string whose fitness is the largest of all andconsider the state of the system that the string denotes as theresult of the fault diagnosis. In case (2), we can get somestrings whose fitness is in preconcerted range and analyzethem to get the result.
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160156
Table 2A secondary non-initial knowledge base
Initial event Non-initial event Probability
V11FC VC1900FF 1V12FC VC1900FF 1V13FC VC1900FF 1V26FC VC1900FF 1V27FC VC1900FF 1V28FC VC1900FF 1V3FC VC1900FF 1V4FC VC1900FF 1V1FC VC1900FF 1V2FC VC1900FF 1HDPAFO VC1900FF 1HDPBFO VC1900FF 1CPAFO VC1900FF 1CPBFO VC1900FF 1LOPL VC1900FF 1MFPAFO VC1900FF 1MFPBFO VC1900FF 1TRF478L VC1900FF 1TRF488L VC1900FF 1TRF498L VC1900FF 1V11FC LCV1900FF 1V12FC LCV1900FF 1V13FC LCV1900FF 1V26FC LCV1900FF 1V27FC LCV1900FF 1V28FC LCV1900FF 1V3FC LCV1900FF 1V4FC LCV1900FF 1V1FC LCV1900FF 1V2FC LCV1900FF 1HDPAFO LCV1900FF 1HDPBFO LCV1900FF 1CPAFO LCV1900FF 1CPBFO LCV1900FF 1LOPL LCV1900FF 1MFPAFO LCV1900FF 1MFPBFO LCV1900FF 1TRF478L LCV1900FF 1TRF488L LCV1900FF 1TRF498L LCV1900FF 1
Table 3Principia of crossover, mutation and selection
Begin phase Metaphase End phase
Principia Ensure variousrights of bad strings
Prevent good strings frombeing destroyed
Wash out bad strings quickly
Selection Random selectionapproximately
Reserve good strings andselect others randomly
Select strings according tofitness
Crossover Random crossover Reserve good strings afterthey are crossed
Good strings are not crossed
Mutation Random mutation Good strings do not mutate Good strings do not mutate

2.6. Knowledge base
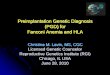
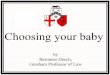
We construct the knowledge base according to fault treeanalysis and event tree analysis [15,16]. A simplified exam-ple fault tree is shown in Fig. 2. The structure and flow-chartof the knowledge base is shown in Fig. 3. The knowledgebase can be divided into four parts: signal table, event table,knowledge base of initial events and knowledge base ofnon-initial events.
The signal table preserves the signal’s name, range,normal value, normal state and direct corresponding event.The event table preserves the event’s name, initial probabil-ity and the feedback to signals. The knowledge base ofinitial events is used to describe the various possible reasonsfor an initial abnormal signal. It consists of a lot of text files.The files content consists of the name and the probability of
the faults. The knowledge base of non-initial events is usedto describe the various possible reasons for an abnormalsignal that is not in accord with the expected signals. Forexample, when the turbine load decreases, the feedwaterlevel of a steam generator should become low. If the feed-water level does not change, we can consider that it ispossible that the feedwater control valve does not work.This knowledge base consists of an initial event, a non-initial event, and a probability.
3. Experimentation checkout
On the 950 MW full size simulator in the Beijing NPPsimulation training center, we do experimentation on faultdiagnosis in the secondary loop of the simulator. The
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160 157
Fig. 2. A simplified example fault tree for the event that nuclear power is abnormally high.
Fig. 3. Structure and flow-chart of knowledge base.

reference power plant of the simulator has three routes: A, Band C.
The water of the primary loop flows through three steamgenerators (SGA, SGB and SGC) and heats the water of thesecond loop into steam. After flowing through the mainsteam header, the steam flows into the turbine and drivesthe generator. The steam changes into water in the conden-sator. After being compressed by the cooler pump (CPA,CPB), and being heated by the low pressure heater (H1, H2,H3 and H4) and high pressure heater (H5-A, H2-B), it is sentto the steam generator by the main feedback pump (MFPA,MFPB).
The concise chart of the system is shown in Fig. 4. In thischart, square triangle symbol represents the flux of the piping,triangle symbol represents the liquid level of thecontainer, circular symbol represents the pressure ofthe piping, diamond symbol represents the temperature ofsubstance and the pentacle symbol represents the state of thevalves. The lines connect with the symbol line at the approx-imate position of each sensor. Some signals (for example,nuclear power and turbine speed) are not marked on thischart.
Seventy-nine signals were chosen from the simulator. Inorder to make the system work effectively, we compressedthe 79 signals to 62 signals. The signals compressed are thestate of some valves. For example, the relief valves
PCV400C consist of several valves and the state of everyvalve is one signal, we compress several signals into onesignal to show the state of PCV400C. Of course, the premiseis that signal compression does not effect the result of thediagnosis. The principles of the signal compression are: (1)when the valves are connected in series, if one or morevalves close, we consider the state of compressed valvesis closed, otherwise it is open; (2) when the valves areconnected in parallel, if one or more valves open, weconsider the state of compressed valves is open, otherwiseit is closed.
These 62 signals can be divided into two kinds. The firstconsists of 35 signals which connect with the secondaryknowledge bases and the second consists of 27 signalswith which connect with the faults directly. There are 128faults supposable in the simulator. While constructing theknowledge base, we use the PSA information and PSA tools(FTA and ETA) to get a list of the 128 faults in relation tothe signals.
We make a diagnosis of several types of faults in thesecondary loop of the simulator. In the process of diagnosis,we use Visual C11 5.0 and Visual Foxpro 5.0 to programthe software and use Windows NT 4.0 as the operatingsystem. The number of initial chromosomes is 400 and thelength of each string is 128. Chromosome crossoverhappens several times per second. Approximately, every
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160158
Fig. 4. Concise chart of the secondary loop.

ten strings have one mutation chance per second. We use therand function to generate the random number. Before call-ing the rand function, we use the srand function to seed thepseudorandom-number generator. We seed the random-number generator with the current time so that the numberswill be different every time we run.
We get the right result for these faults, as shown in Table4. In this table, “bit string” denotes the character of the resultstrings that we get. “Number of alarm signals” shows thenumber of alarm signals generated by the simulator whenwe finish diagnosis. “Probability” shows the probability thatwe get the right result. The result shows this method candiagnose the fault accurately.
Here is the process of the fault “LOTL80”: NPP is work-ing on the 100% turbine load and power is 950 MW. Webegin the normal operation of decreasing the turbine load.When the turbine load is 97%, we import the fault “feed-water control valve FCV488 of steam generator B routefroze”. Since the turbine load is decreasing, the openingof the main turbine valve GV diminishes from 0.53. Whenthe feedwater control valve of steam generator B has frozen,the flow rate of feedwater line B becomes large. 8 s laterafter importing the fault, the first signal “feedwater controlvalve of steam generator B from automatic to manual”.Later the signal “flow rate and steam rate in the B routemismatch” and other abnormal signals appear. About3 min later, the signal “level of generator B becomes
high” appears and leads to the stop of the reactor. 40 slater after the first abnormal signal appears, we get theright result.
In the process of fault diagnosis, we changed thesignals and knowledge base properly. Table 5 is theresult of the diagnosis. In this table, “U” denotes weget right result and “X” denotes we do not get rightresult. These results validate that this method has compara-tive adaptability to imperfect expert knowledge and illu-sive signals. In this table, when we add an independentabnormal signal to the signals generated by the simulator,we fail to diagnose the fault of “TRSGC”. By analyzing thefitness of the strings, we find that the string that representsthe fault “TRSGC” does not have the largest fitness inmany signal cycles. It shows that the fitness needs to beimproved.
4. Summary and conclusions
1. The GA method is easily programmed. Its kernel processcan be treated as a matrix operation and it does notrequire special work.
2. Since this method diagnoses the fault base using all kindsof expert knowledge including initial probability offaults, probability of events and other instances, it hascomparative adaptability to imperfect expert knowledge.
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160 159
Table 4Diagnostic result of the type faults
Bit string Number of alarm signals Symbol of fault Description of fault Event sort Probability (%)
1 28th bit is 1 4 V31FO Valve V31 fails open Initial 1002 32nd bit is 1 5 LOTL-80 When decrease of turbine load
from 100 to 80%, feedwatercontrol valve FCV488 failsfrozen
Initial 98
3 98th bit is 1 5 TRSGC Tube ruptures in streamgenerator C
Initial 90
70th bit is 1 RAFR Some of relief valves RA fail torestore on demand
Non-Initial
73rd bit is 1 RBFR Some of relief valves RB fail torestore on demand
Non-Initial
76th bit is 1 RCFR Some of relief valves RC fail torestore on demand
Non-Initial
4 18th bit is 1 5 FPLCTR Failures in primary loop causeturbine runback
Initial 100
5 78th bit is 1 4 SGVFC Some of GV valves fail closed Initial 100
Table 5Diagnostic result of special situation
V31FO LOTL-80 TRSGC FPLCTR SGVFC
Delete an abnormal signal U U U U U
Add an independentabnormal signal
U U X U U
Delete one part of theknowledge base
U U U U U

3. Since it is based on all signals in the system, it deals wellwith the illusive signals.
4. The initial strings are produced randomly. The probabil-ity of the fault will become lower if the character of theinitial strings is bad.
5. The problem of how to get a more effective fitness func-tion is work that should be resolved.
References
[1] Qin Zhang, Xuegao An, Jin Gu, Bingquan Zhao, Dazhi Xue, ShurenXi. Application of FBOLES—a prototype expert system for faultdiagnosis in nuclear power plants. Reliab Engng Syst Safety1994;44:225–35.
[2] Chung Hak-yeong, Bien Zeungnam, Park Joo-hyun, Seong Poong-hyun. Incipient multiple fault diagnosis in real time with applicationto large-scale system. IEEE Trans Nucl Sci 1994;41(4):1692–703.
[3] Seock Kim Inn. Computerized systems for on-line management offailures: a state-of-the-art discussion of alarm systems and diagnosticsystems applied in the nuclear industry. Reliab Engng Syst Safety1994;44:279–95.
[4] Ozaki Yoshihiko, Suda Kazunori, Ozawa Kenji. A new diagnosismethod using alarm annunciation for nuclear power plants. J NuclSci Technol 1997;34:1053–66.
[5] Varde PV, Sankar S, Verma AK. An operator support system forresearch reactor operations and fault diagnosis through a connectionist
framework and PSA based knowledge based systems. Reliab EngngSyst Safety 1998;60:53–69.
[6] Deb K. Genetic algorithms for function optimization. In: Herrera F,Verdegay J, editors. Genetic algorithms and soft computing, Heidel-berg: Physica-Verl, 1996. p. 3–29.
[7] Yao Yao. Method and application of Monte Carlo nonlinear inver-sion, Beijing: Metallurgy Industry Press, 1997.
[8] Holland JH. Genetic algorithms. Scientific American 1992;267:66–72.
[9] Mark J. Optimizing genetic algorithm parameters for multiple faultdiagnosis applications. American Association for Artificial Intelli-gence Published by IEEE, 434–40.
[10] Fushuan Wen, Zhenxiang Han. Fault section estimation in powersystems using genetic algorithm. Electric Power Syst Res 1995;34(3):165–72.
[11] Nagabhushana TN, Chandrasekharaiah HS. Adaptive fault diagnosisof large interconnected power networks using genetic algorithms. JInd Inst Sci 1997;77(1):95–106.
[12] Fushuan Wen, Chan CS. New approach to fault diagnosis in electricaldistribution networks using a genetic algorithm. Artific Intell Engng1998;12(1–2):69–80.
[13] IAEA-TECDOC-542, Use of expert system in nuclear safety. A Tech-nical Document of IAEA, Vienna, 1988.
[14] Bingquan Zhao, Xiang Fang. Experiment research on cognition relia-bility model of nuclear power plant. J Tsinghua University (Sci Tech-nol) 1999;39:122–5.
[15] Xiangrui Huang. Reliability engineering, Beijing: Press of TsinghuaUniversity, 1991.
[16] Liang GS, Wang MJ. Fuzzy fault-tree analysis using failure possibi-lity. Microelectron Reliab 1993;33(4):583–97.
Z. Yangping et al. / Reliability Engineering and System Safety 67 (2000) 153–160160