Embed Size (px)
Citation preview

UNIVERSIDAD POLITECNICA SALESIANA
INGENIERIA MECANICA AUTOMOTRIZ
COMPUTADORAS AUTOMOTRICES
Arquitectura de la ecu
UNIDAD DE CONTROL ELECTRONICA La ECU es el conjunto de componentes electrónicos que
tiene por función procesar la información recibida de los sensores, y calcular las señales de activación para los elementos actuadores
También se la conoce como: ECC, ECM, ECU, ECCS, CPU, PCM, VCM, etc

TIPOS DE MODULOS DE CONTROL ECM.- (engine control module), modulo de control del motor
Controla y almacena únicamente los códigos de diagnóstico de fallas (DTCs) de los componentes del motor
PCM.- (train power control module), modulo de control del tren de potencia. Controla y almacena datos del motor y la transmisión
VCM.- (vehicle control module), modulo de control del vehículo. Controla y almacena datos del motor, la transmisión y otros sistemas del vehículo como sistemas de frenos ABS
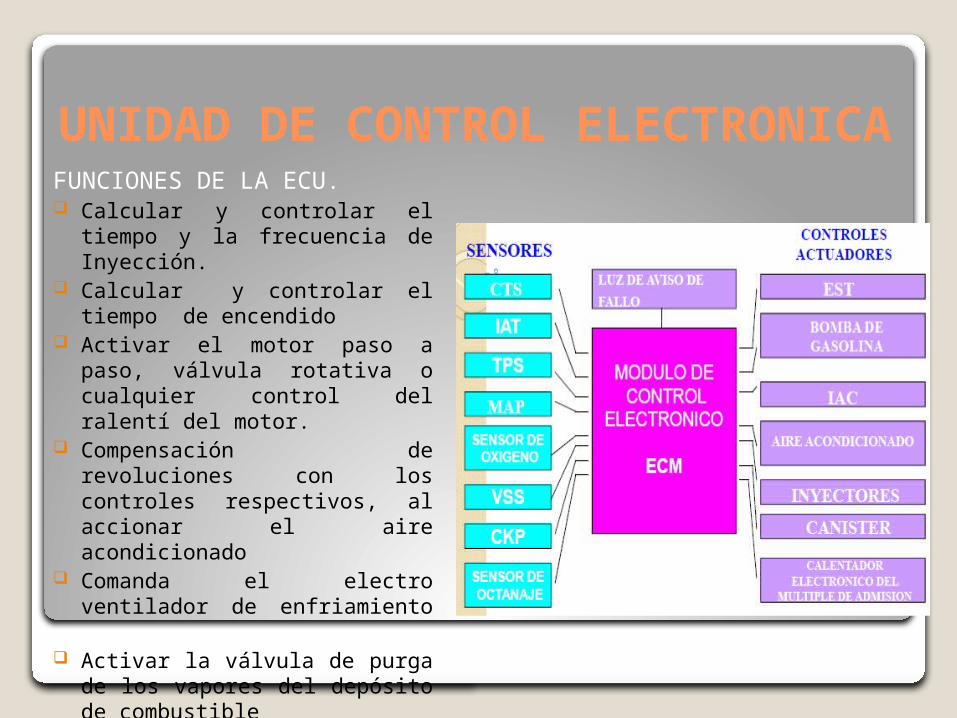
UNIDAD DE CONTROL ELECTRONICAFUNCIONES DE LA ECU. Calcular y controlar el tiempo y
la frecuencia de Inyección. Calcular y controlar el tiempo
de encendido Activar el motor paso a paso,
válvula rotativa o cualquier control del ralentí del motor.
Compensación de revoluciones con los controles respectivos, al accionar el aire acondicionado
Comanda el electro ventilador de enfriamiento
Activar la válvula de purga de los vapores del depósito de combustible
Comandar la válvula solenoide de control neumático de la válvula EGR
UNIDAD DE CONTROL ELECTRONICA
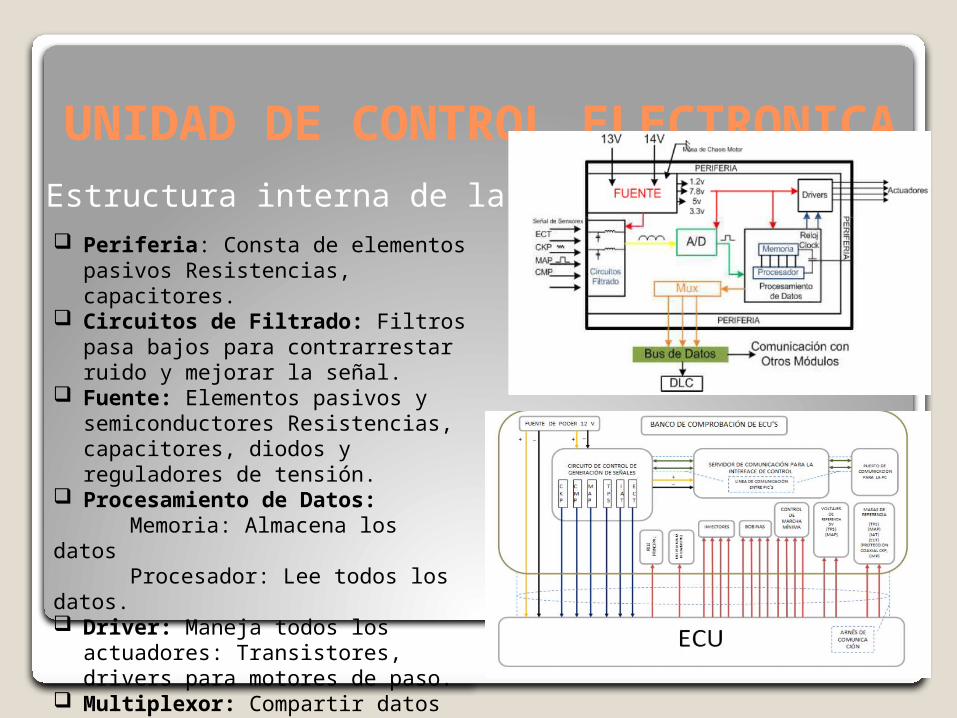
Estructura interna de la ECU Periferia: Consta de elementos
pasivos Resistencias, capacitores. Circuitos de Filtrado: Filtros pasa
bajos para contrarrestar ruido y mejorar la señal.
Fuente: Elementos pasivos y semiconductores Resistencias, capacitores, diodos y reguladores de tensión.
Procesamiento de Datos: Memoria: Almacena los datos Procesador: Lee todos los datos. Driver: Maneja todos los
actuadores: Transistores, drivers para motores de paso.
Multiplexor: Compartir datos con otras ECUS.
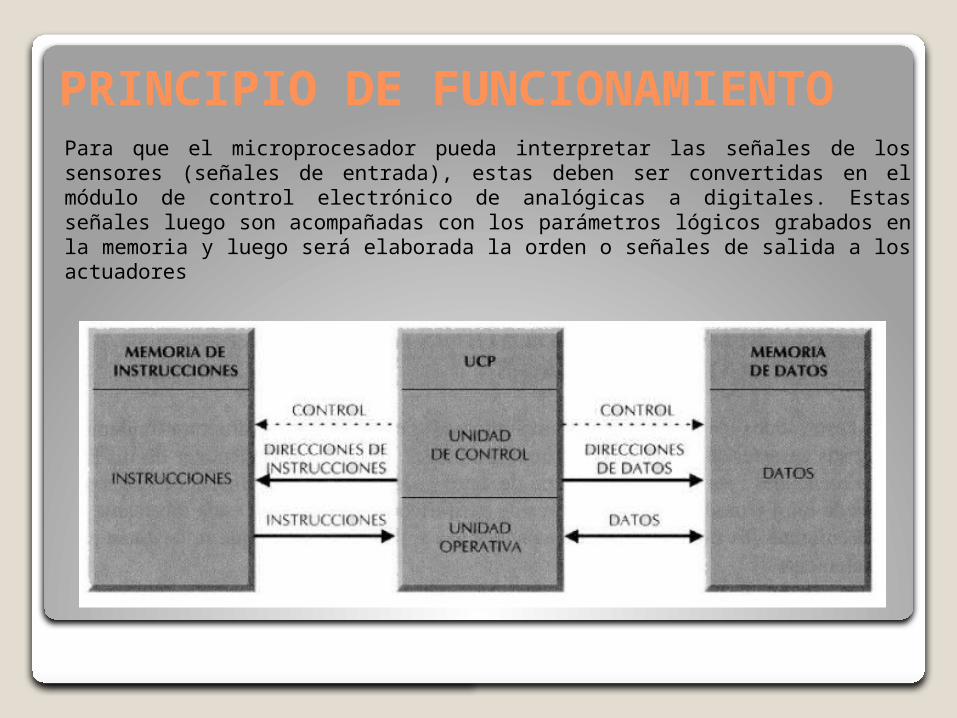
PRINCIPIO DE FUNCIONAMIENTOPara que el microprocesador pueda interpretar las señales de los sensores (señales de entrada), estas deben ser convertidas en el módulo de control electrónico de analógicas a digitales. Estas señales luego son acompañadas con los parámetros lógicos grabados en la memoria y luego será elaborada la orden o señales de salida a los actuadores
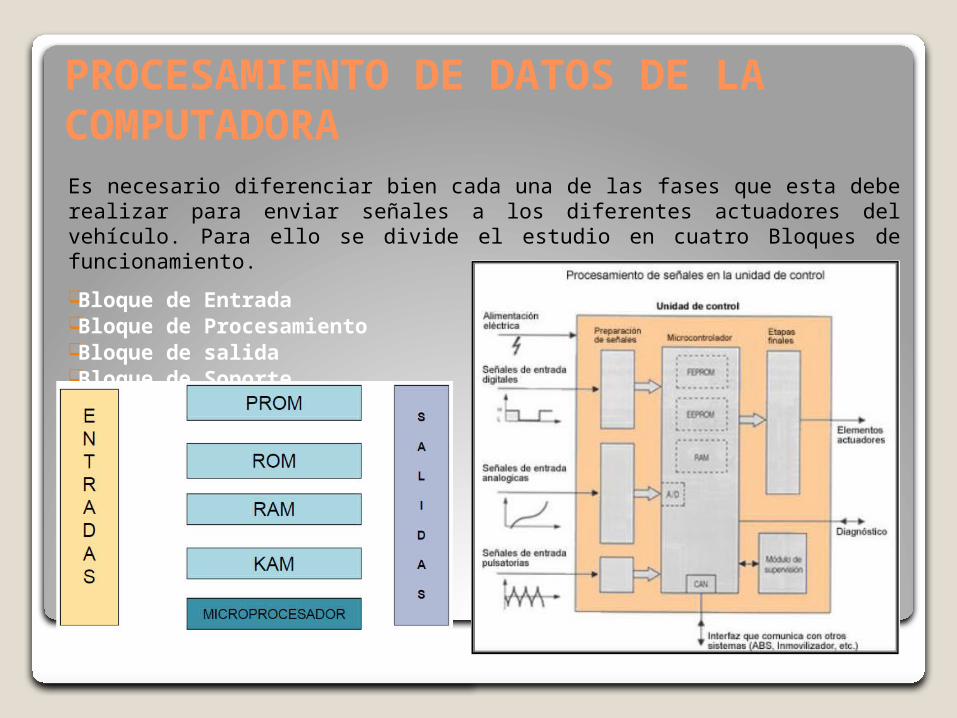
PROCESAMIENTO DE DATOS DE LA COMPUTADORAEs necesario diferenciar bien cada una de las fases que esta debe realizar para enviar señales a los diferentes actuadores del vehículo. Para ello se divide el estudio en cuatro Bloques de funcionamiento.
Bloque de Entrada Bloque de Procesamiento Bloque de salida Bloque de Soporte
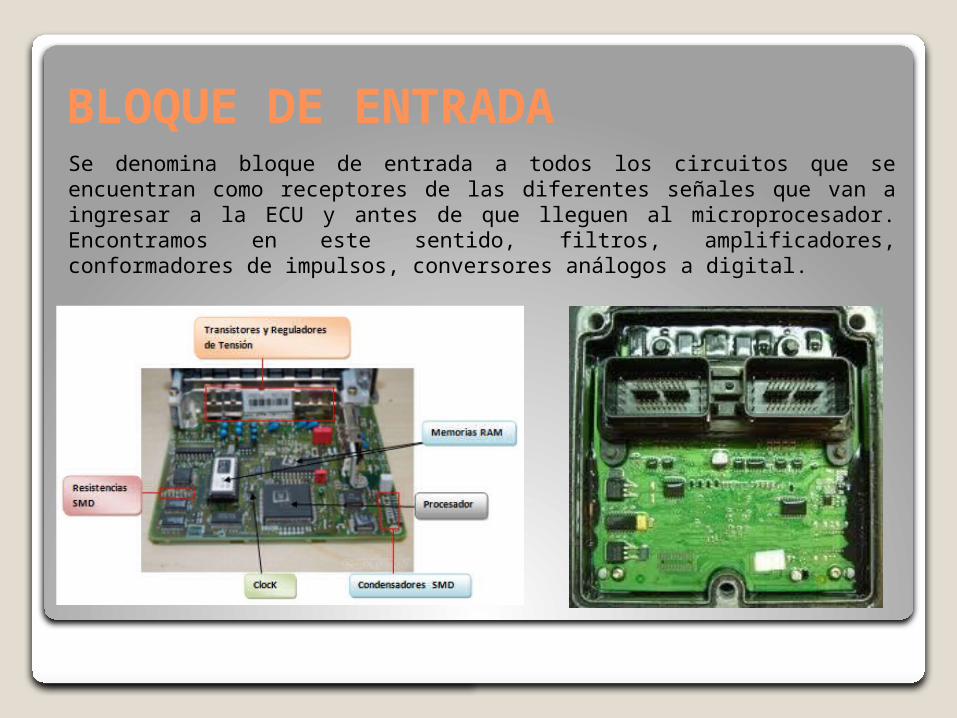
BLOQUE DE ENTRADASe denomina bloque de entrada a todos los circuitos que se encuentran como receptores de las diferentes señales que van a ingresar a la ECU y antes de que lleguen al microprocesador. Encontramos en este sentido, filtros, amplificadores, conformadores de impulsos, conversores análogos a digital.
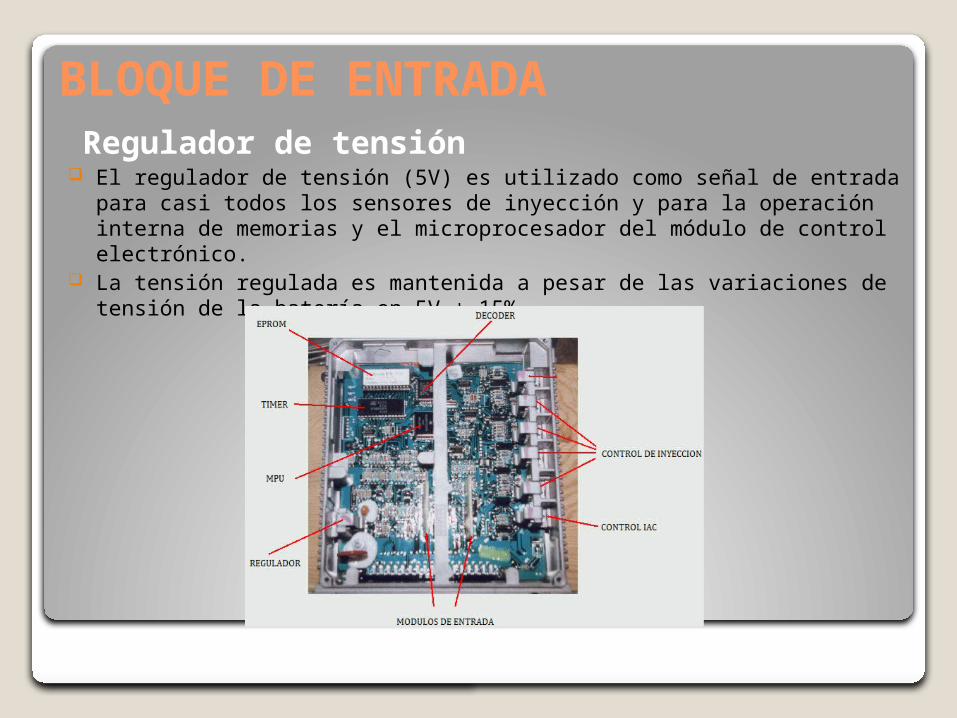
BLOQUE DE ENTRADARegulador de tensión
El regulador de tensión (5V) es utilizado como señal de entrada para casi todos los sensores de inyección y para la operación interna de memorias y el microprocesador del módulo de control electrónico.
La tensión regulada es mantenida a pesar de las variaciones de tensión de la batería en 5V ± 15%
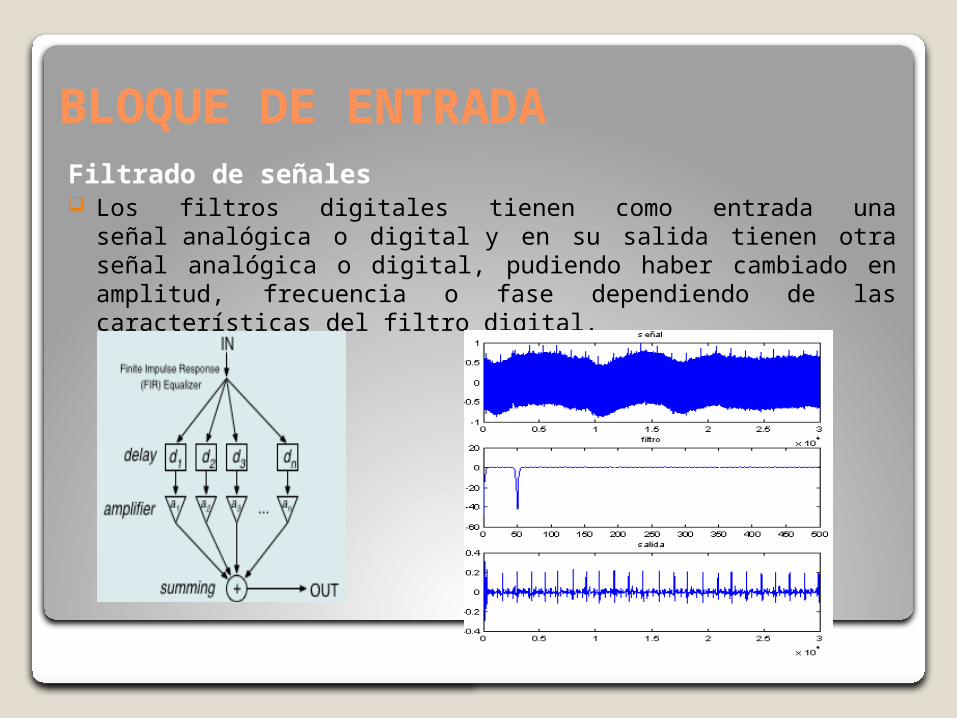
BLOQUE DE ENTRADAFiltrado de señales Los filtros digitales tienen como entrada una señal analógica o
digital y en su salida tienen otra señal analógica o digital, pudiendo haber cambiado en amplitud, frecuencia o fase dependiendo de las características del filtro digital.
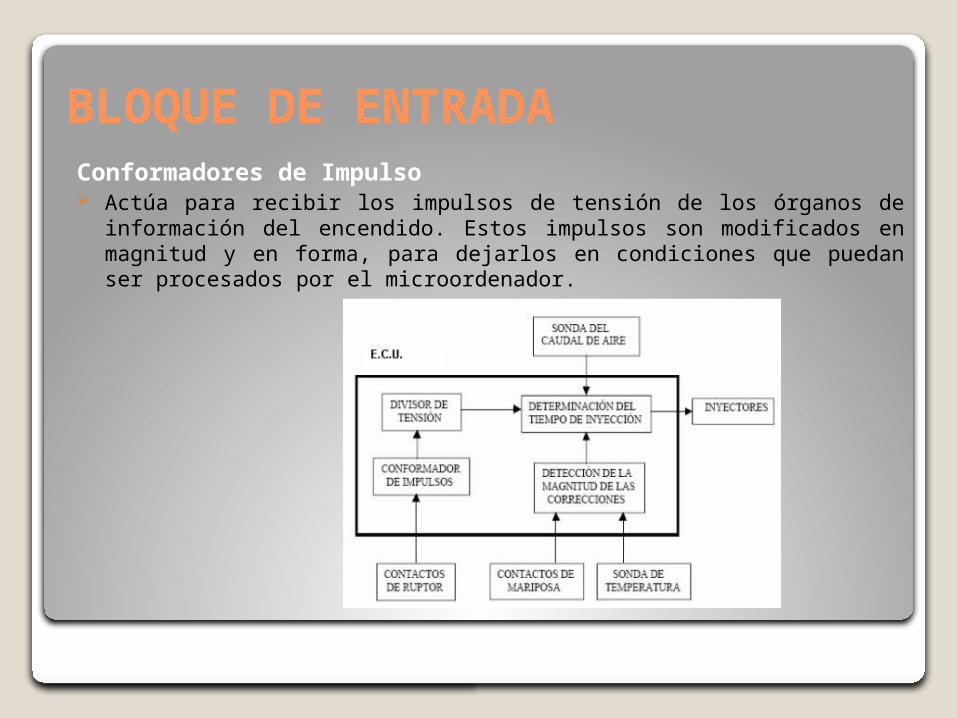
BLOQUE DE ENTRADAConformadores de Impulso Actúa para recibir los impulsos de tensión de los órganos de información
del encendido. Estos impulsos son modificados en magnitud y en forma, para dejarlos en condiciones que puedan ser procesados por el microordenador.
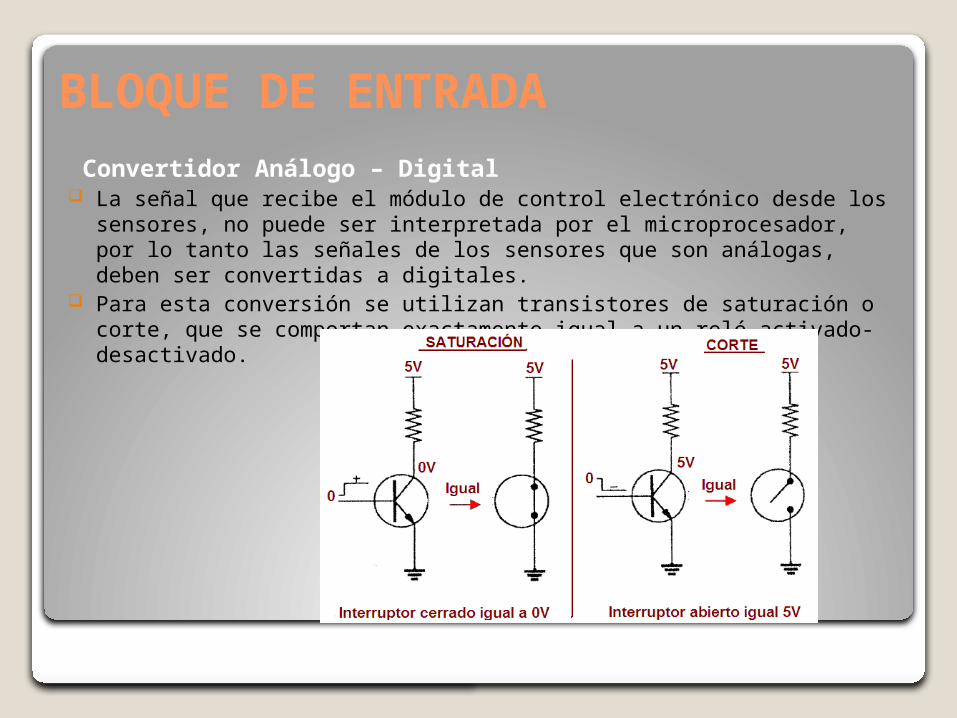
BLOQUE DE ENTRADAConvertidor Análogo – Digital
La señal que recibe el módulo de control electrónico desde los sensores, no puede ser interpretada por el microprocesador, por lo tanto las señales de los sensores que son análogas, deben ser convertidas a digitales.
Para esta conversión se utilizan transistores de saturación o corte, que se comportan exactamente igual a un relé activado-desactivado.
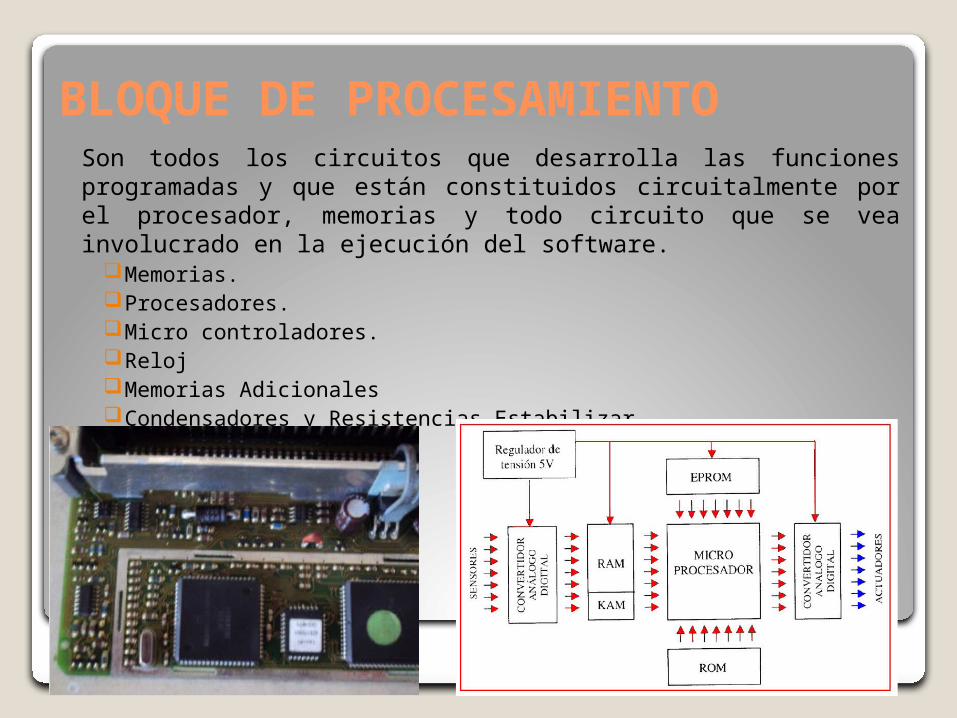
BLOQUE DE PROCESAMIENTOSon todos los circuitos que desarrolla las funciones programadas y que están constituidos circuitalmente por el procesador, memorias y todo circuito que se vea involucrado en la ejecución del software.
Memorias.Procesadores.Micro controladores.RelojMemorias AdicionalesCondensadores y Resistencias Estabilizar
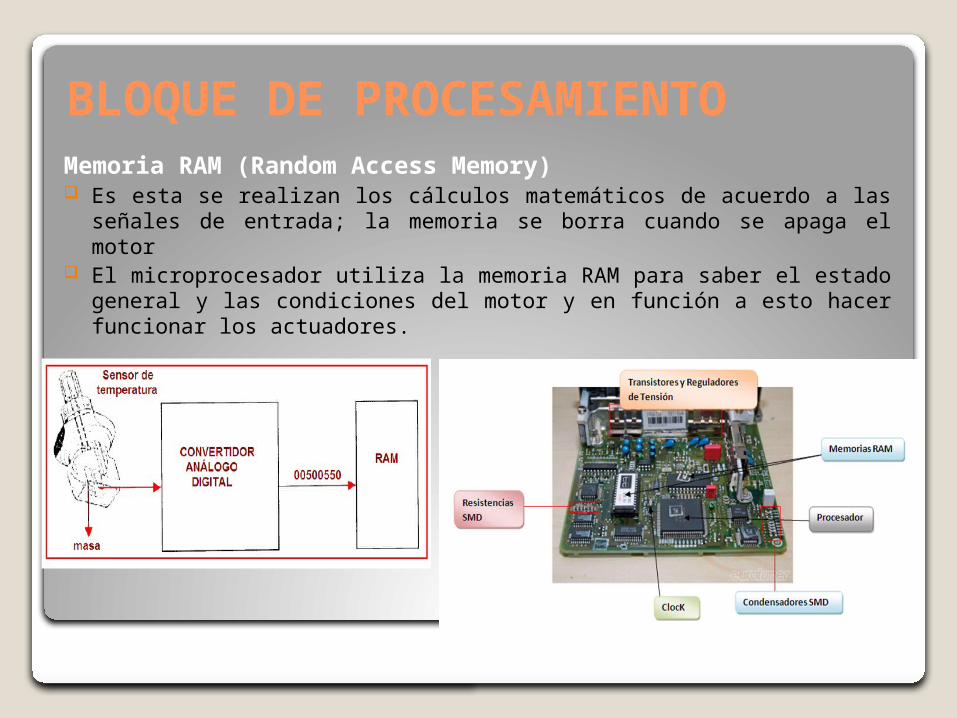
BLOQUE DE PROCESAMIENTOMemoria RAM (Random Access Memory) Es esta se realizan los cálculos matemáticos de acuerdo a las señales de
entrada; la memoria se borra cuando se apaga el motor El microprocesador utiliza la memoria RAM para saber el estado general y
las condiciones del motor y en función a esto hacer funcionar los actuadores.
BLOQUE DE PROCESAMIENTO
Memoria KAM (Keep Alive Memory) La memoria KAM vive con la memoria RAM y su función es de guardar los
datos que no se pueden perder al cerrar el contacto, como por ejemplo códigos de fallas aleatorias de sensores.
A diferencia de la memoria RAM, la KAM no se borra al cerrar el contacto, pero si se borra al desconectar la batería.
Cuando en la memoria KAM se almacena un defecto, este permanecerá instalado aun después de ser corregido, debiendo desconectar la batería para que se borre o en algunos casos, se debe proceder al borrado con un scanner.
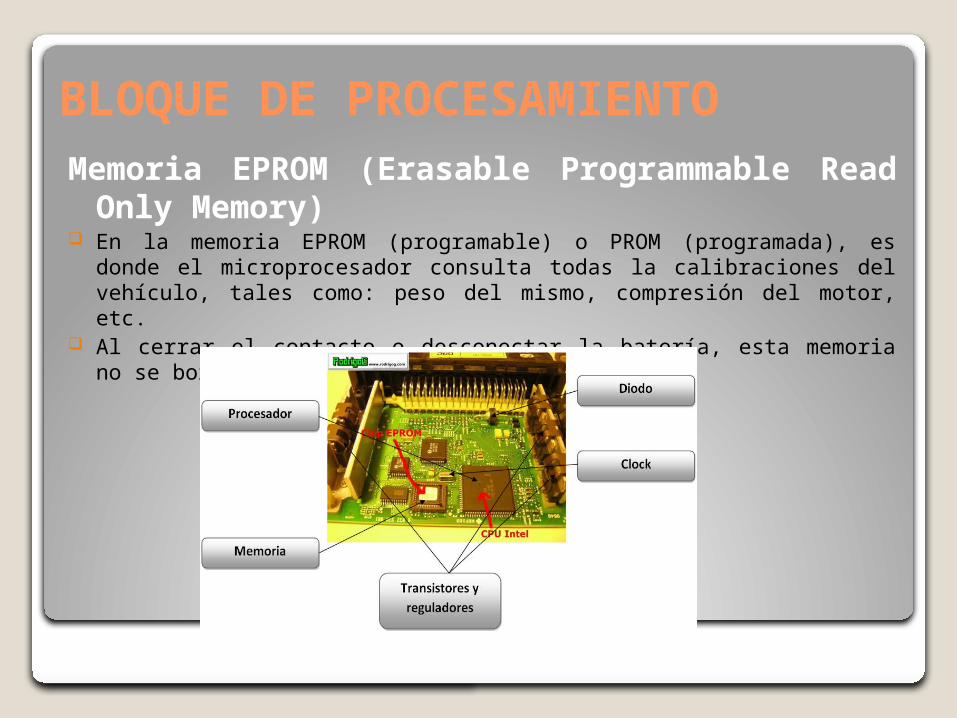
BLOQUE DE PROCESAMIENTOMemoria EPROM (Erasable Programmable
Read Only Memory) En la memoria EPROM (programable) o PROM (programada), es donde el
microprocesador consulta todas la calibraciones del vehículo, tales como: peso del mismo, compresión del motor, etc.
Al cerrar el contacto o desconectar la batería, esta memoria no se borra.
BLOQUE DE PROCESAMIENTOMemoria ROM (Read Only Memory) La memoria ROM mantiene grabados los programas con todos los datos, Y curvas
características , valores teóricos, etc. con los que ha de funcionar el sistema. Esta memoria es utilizada por el microprocesador para comparar los parámetro de
cada sensor en cada situación y en los casos en que el microprocesador detecte alguna anomalía en alguna señal, la reemplazará por un valor de la memoria ROM
La memoria ROM es una memoria de consulta y al igual que la memoria EPROM no se borra ni al cerrar el contacto, ni al desconectar la batería

BLOQUE DE PROCESAMIENTOMicroprocesador Básicamente el microprocesador es el paquete de programas ubicados
dentro del control electrónico, para el mejor funcionamiento y control del motor. Estos programas incluyen todos los cálculos matemáticos, toma decisiones y estrategia de emergencia
BLOQUE DE PROCESAMIENTOContiene en su interior tres dispositivos
fundamentales : Unidad Lógica de Calculo (ALU): Realiza las operaciones aritméticas y
las operaciones lógicas Acumulador: Es una memoria intermedia que le permite al CPU guardar
datos mientras trabajo con otros que tendrán relación con lo que está procesando
Unidad de Control: Es el elemento activo que solicita los datos, controla las entradas, las salidas y el desarrollo de las operaciones

BLOQUE DE SALIDAAsí como las señales son tratadas al ingresar, existen circuitos que se encuentran entre las salidas del microprocesador y los diferentes elementos que van a ser actuados como por ejemplo: Bobinas de encendido, inyectores, relés, etc.
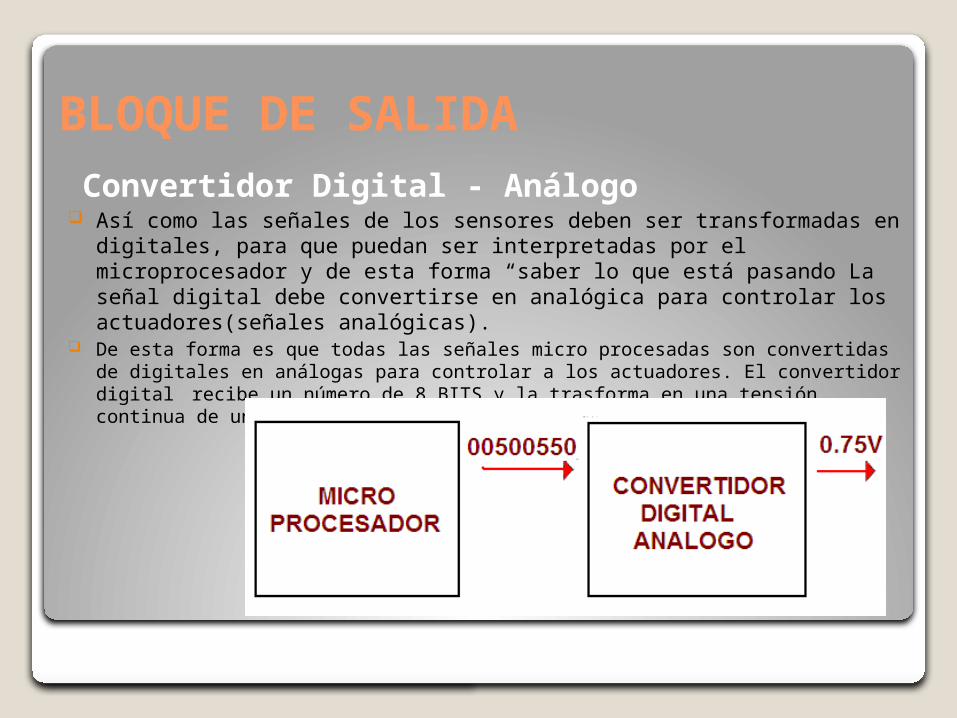
BLOQUE DE SALIDAConvertidor Digital - Análogo
Así como las señales de los sensores deben ser transformadas en digitales, para que puedan ser interpretadas por el microprocesador y de esta forma “saber lo que está pasando La señal digital debe convertirse en analógica para controlar los actuadores(señales analógicas).
De esta forma es que todas las señales micro procesadas son convertidas de digitales en análogas para controlar a los actuadores. El convertidor digital recibe un número de 8 BITS y la trasforma en una tensión continua de un valor proporcional al número digital.
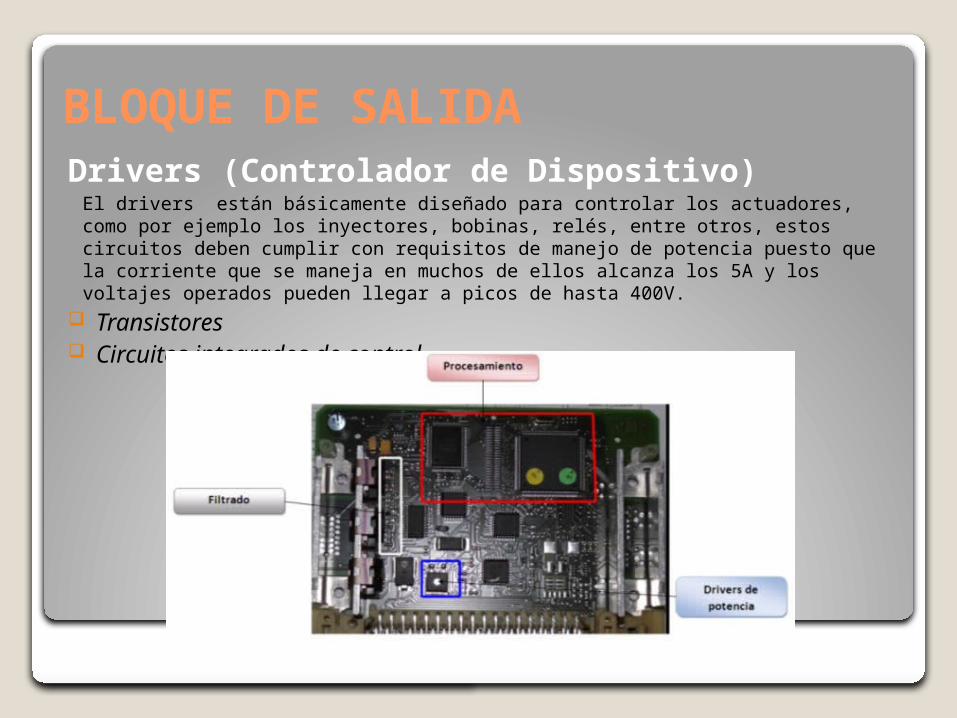
BLOQUE DE SALIDADrivers (Controlador de Dispositivo)
El drivers están básicamente diseñado para controlar los actuadores, como por ejemplo los inyectores, bobinas, relés, entre otros, estos circuitos deben cumplir con requisitos de manejo de potencia puesto que la corriente que se maneja en muchos de ellos alcanza los 5A y los voltajes operados pueden llegar a picos de hasta 400V.
Transistores Circuitos integrados de control
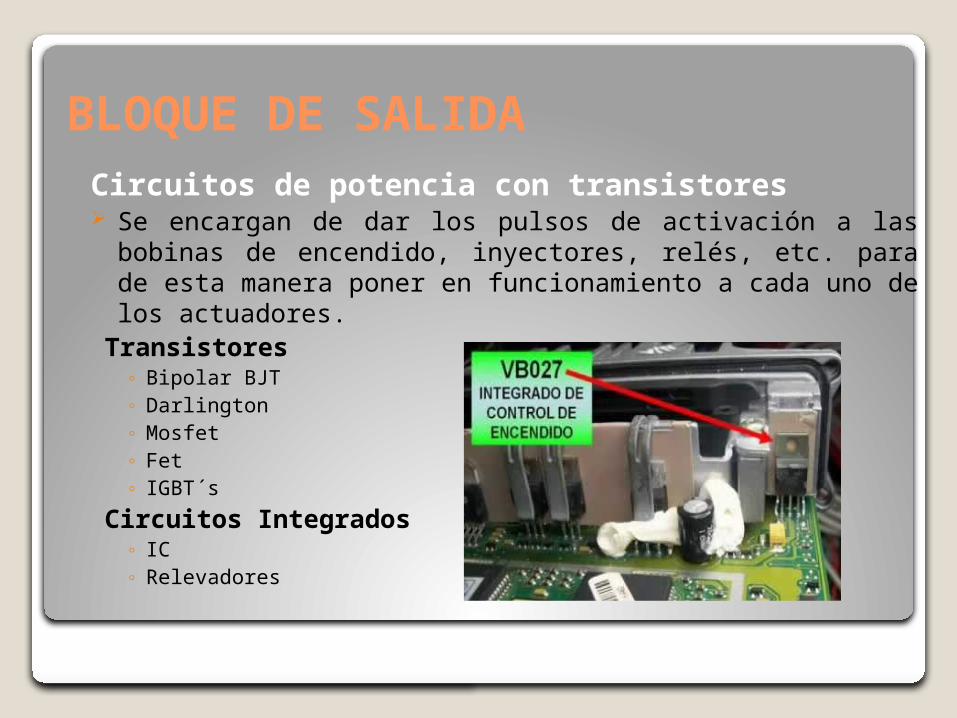
BLOQUE DE SALIDACircuitos de potencia con transistores Se encargan de dar los pulsos de activación a las bobinas
de encendido, inyectores, relés, etc. para de esta manera poner en funcionamiento a cada uno de los actuadores.
Transistores ◦ Bipolar BJT◦ Darlington◦ Mosfet◦ Fet◦ IGBT´s
Circuitos Integrados ◦ IC◦ Relevadores
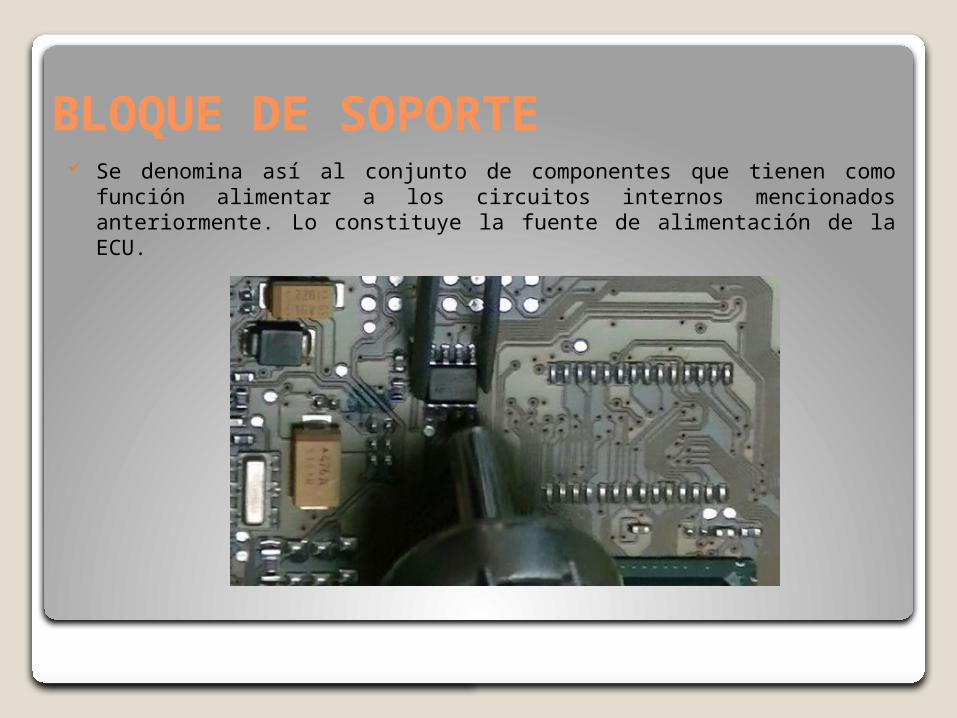
BLOQUE DE SOPORTE Se denomina así al conjunto de componentes que tienen como función
alimentar a los circuitos internos mencionados anteriormente. Lo constituye la fuente de alimentación de la ECU.
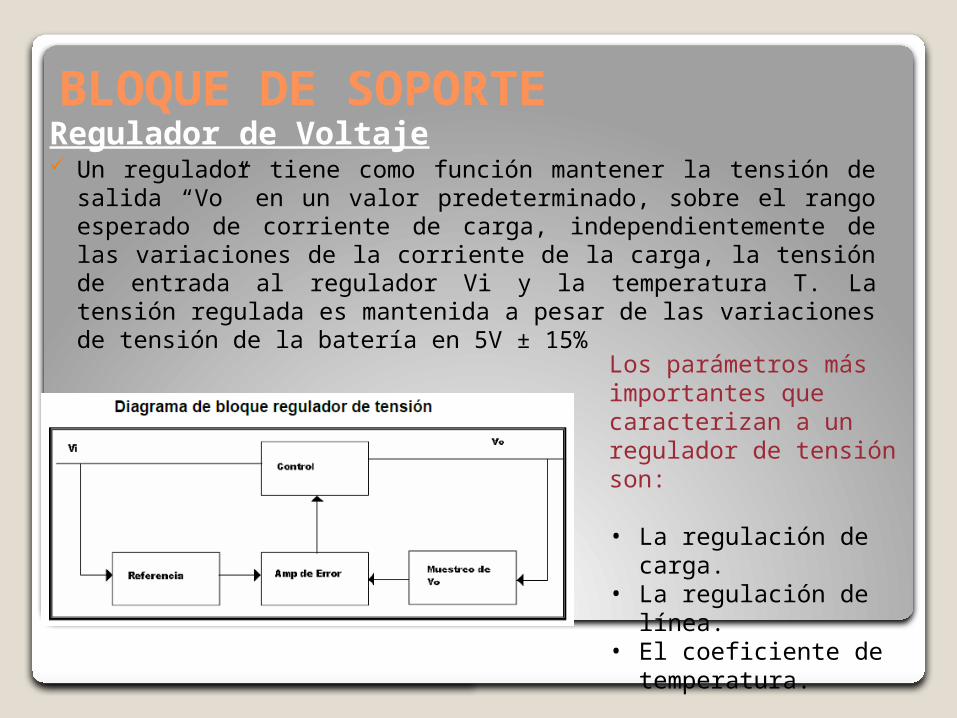
BLOQUE DE SOPORTERegulador de Voltaje Un regulador tiene como función mantener la tensión de salida
“Vo” en un valor predeterminado, sobre el rango esperado de corriente de carga, independientemente de las variaciones de la corriente de la carga, la tensión de entrada al regulador Vi y la temperatura T. La tensión regulada es mantenida a pesar de las variaciones de tensión de la batería en 5V ± 15%
Los parámetros más importantes que caracterizan a un regulador de tensión son:
• La regulación de carga.
• La regulación de línea. • El coeficiente de
temperatura.
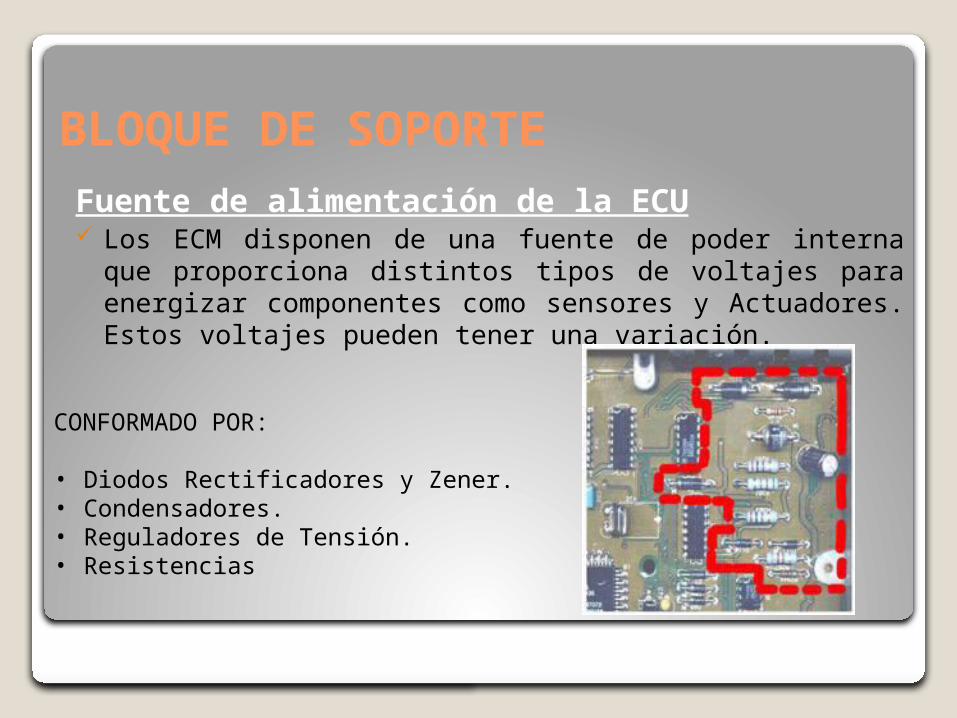
BLOQUE DE SOPORTEFuente de alimentación de la ECU Los ECM disponen de una fuente de poder interna que
proporciona distintos tipos de voltajes para energizar componentes como sensores y Actuadores. Estos voltajes pueden tener una variación.
CONFORMADO POR:
• Diodos Rectificadores y Zener. • Condensadores. • Reguladores de Tensión. • Resistencias
BLOQUE DE SOPORTE + 5 volt. + - 0.5 V Voltaje de Suministro para sensores análogos
+ 5 volt. + - 0.5 V Voltaje de Suministro para sensores Digitales o PWM
+ 12 volt. + - 1V Voltaje de Suministro para sensores de frecuencia electrónicos.
+ 12 volt. + - 0.5 Voltaje de Suministro para solenoides para inyección de combustible
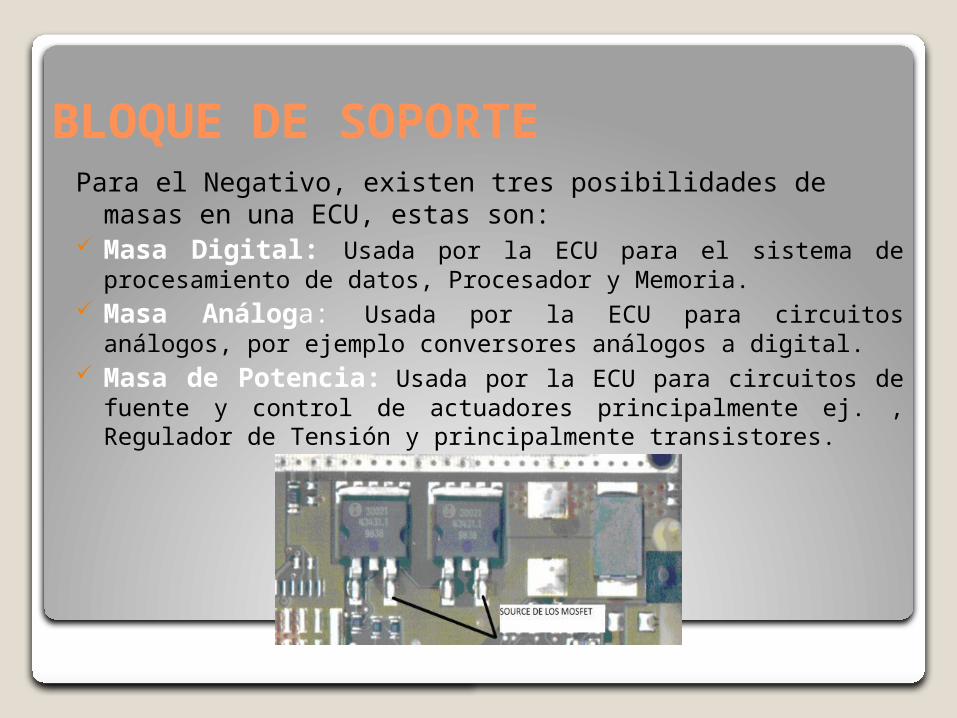
BLOQUE DE SOPORTEPara el Negativo, existen tres posibilidades de masas en una
ECU, estas son: Masa Digital: Usada por la ECU para el sistema de
procesamiento de datos, Procesador y Memoria. Masa Análoga: Usada por la ECU para circuitos análogos, por
ejemplo conversores análogos a digital. Masa de Potencia: Usada por la ECU para circuitos de fuente
y control de actuadores principalmente ej. , Regulador de Tensión y principalmente transistores.
BLOQUE DE SOPORTE Masa de Blindaje: La Ecu posee un circuito de
blindaje, el cual es capaz de transportar las señales dentro de la ECU sin la presencia de ruido electromagnético.
COMUNICACIÓN
Son los pines donde la computadora se comunica con otros módulos incluyendo al scanner de diagnóstico
Para la identificación de los pines se debe observar y estudiar el diagrama eléctrico
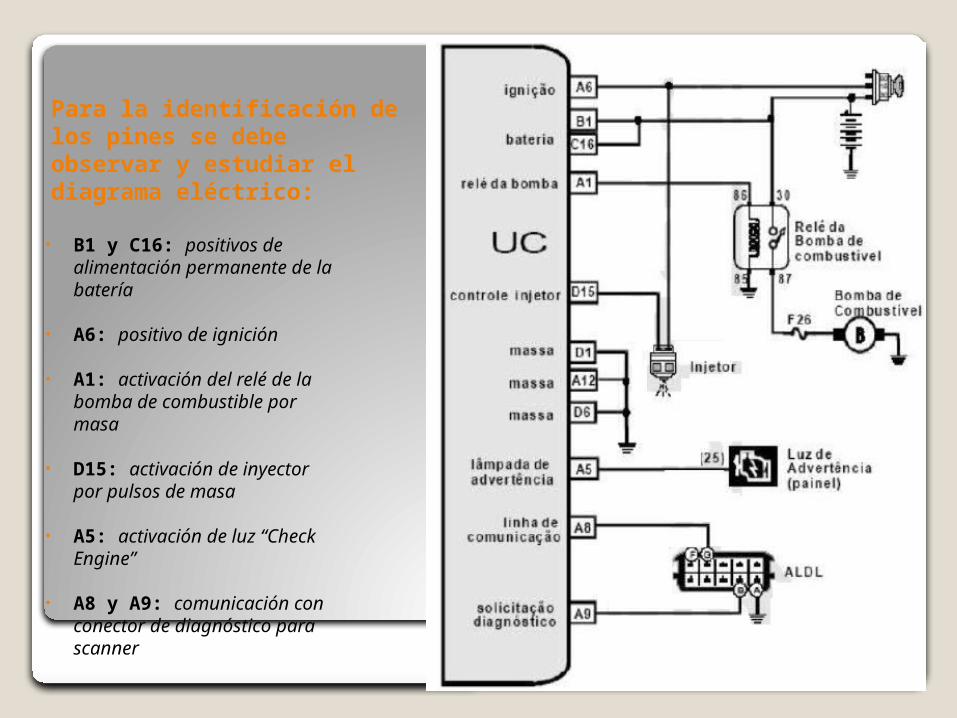
Para la identificación de los pines se debe observar y estudiar el diagrama eléctrico:
• B1 y C16: positivos de alimentación permanente de la batería
• A6: positivo de ignición
• A1: activación del relé de la bomba de combustible por masa
• D15: activación de inyector por pulsos de masa
• A5: activación de luz “Check Engine”
• A8 y A9: comunicación con conector de diagnóstico para scanner
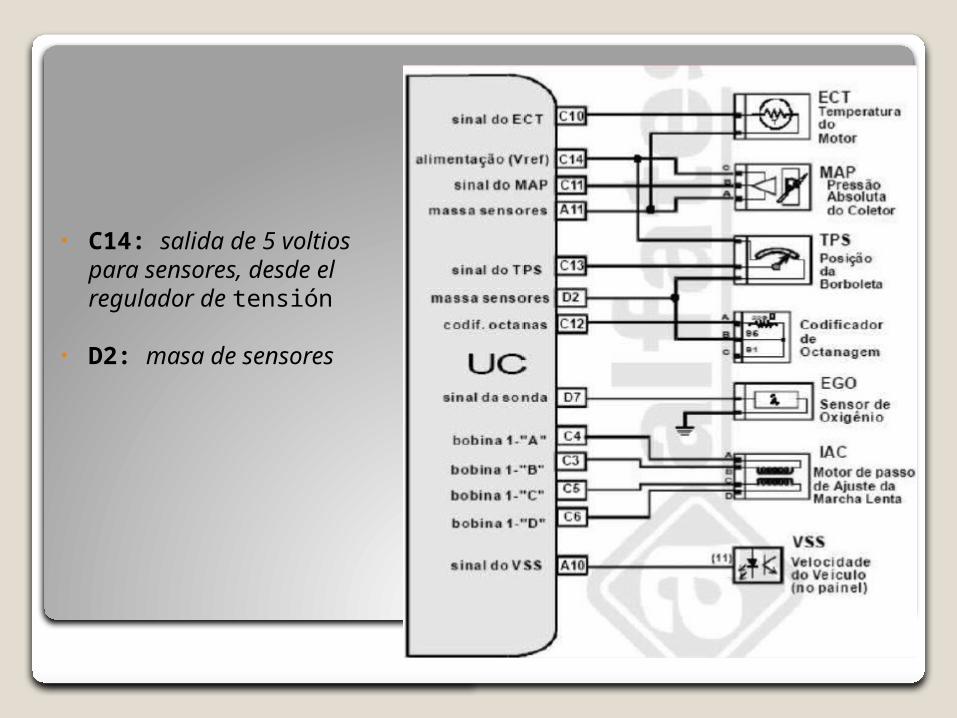
• C14: salida de 5 voltios para sensores, desde el regulador de tensión
• D2: masa de sensores
Cuidados especiales No desconectar el módulo de control electrónico sin antes desconectar la
ignición y el fusible de alimentación de la batería. No desconectar ningún componente del sistema de inyección electrónica, con
el vehículo en marcha o en contacto El módulo de control electrónico no soporta temperaturas superiores a 80ºC,
por lo tanto es recomendable retirarlo si el vehículo es colocado en una cámara de pintura.
Si se debe realizar soldaduras eléctricas, se debe retirar el módulo de control electrónico, al igual todas las computadoras dispuestas en el vehículo
El modulo de control electrónico funcionará correctamente mientras que la tensión de alimentación sea entre 10V y 15V, también se debe tomar en cuenta que la tensión máxima que soporta el módulo esta alrededor de los 16V, pudiéndose quemar si supera esta tensión
Las alarmas colocadas al sistema de ignición o inyección, provocarán cortes bruscos al módulo de control pudiendo destruirlo, por lo tanto el corte de alarma se debe realizar en la bomba de combustible y las tomas de alimentación de 12V se deben hacer directamente de la batería.
Cuidados especiales
Los componentes del modulo de control electrónico son altamente sensibles a la humedad por lo tanto debe tenerse especial cuidado con las salpicaduras de agua, zonas inundadas y lavado del motor.
Cuando se realiza un puente con una batería auxiliar, el negativo de esta batería debe conectarse a masa de chasis o del motor y no al negativo del vehículo, para no producir un pico de tensión.
No se deben utilizar cargadores de batería que no estén preparados para vehículos con inyección electrónica, pues el cargador al arrancar produce un pico de tensión capaz de quemar al módulo de control electrónico
Nunca se debe verificar si hay chispa en el cable de bujía acercando a masa (bloque motor o chasis), si o que se debe colocar una bujía en el terminal del cable y sujetarla a masa
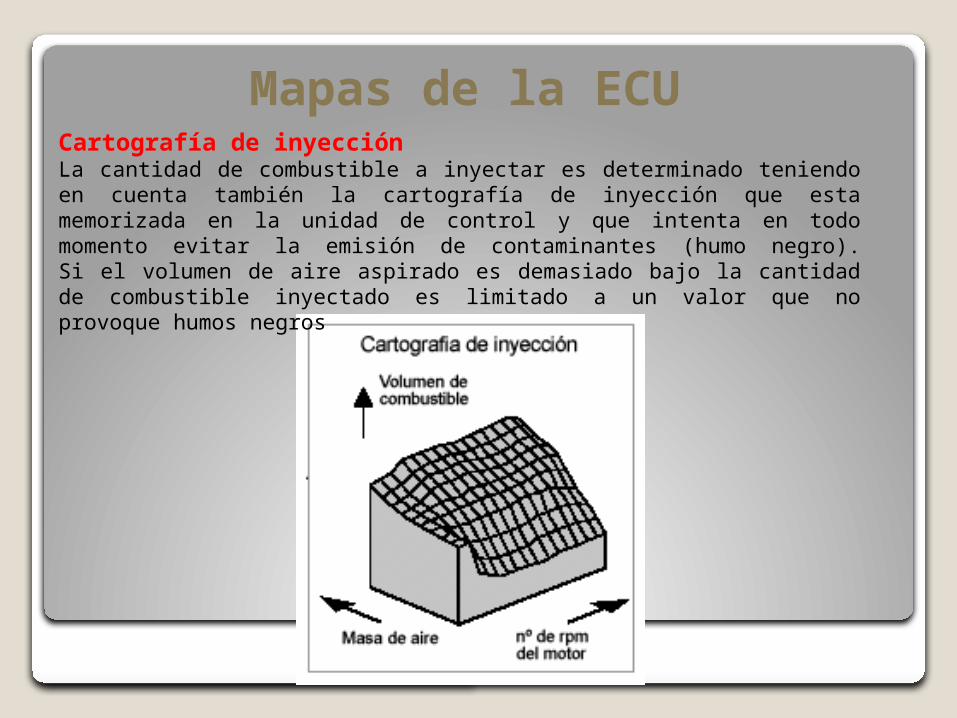
Mapas de la ECUCartografía de inyecciónLa cantidad de combustible a inyectar es determinado teniendo en cuenta también la cartografía de inyección que esta memorizada en la unidad de control y que intenta en todo momento evitar la emisión de contaminantes (humo negro).Si el volumen de aire aspirado es demasiado bajo la cantidad de combustible inyectado es limitado a un valor que no provoque humos negros
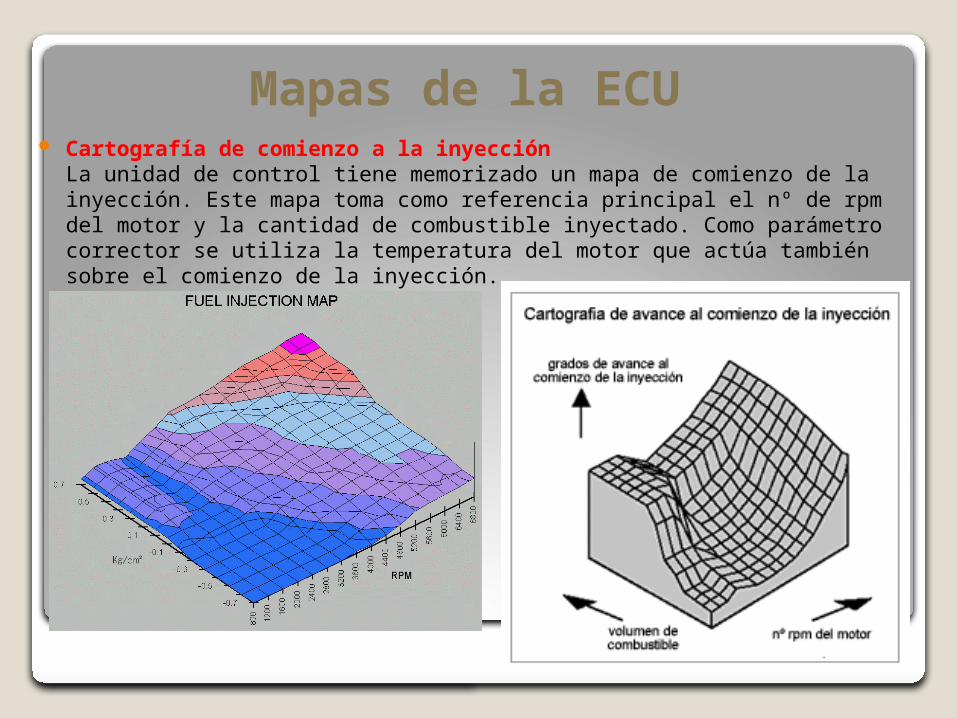
Cartografía de comienzo a la inyecciónLa unidad de control tiene memorizado un mapa de comienzo de la inyección. Este mapa toma como referencia principal el nº de rpm del motor y la cantidad de combustible inyectado. Como parámetro corrector se utiliza la temperatura del motor que actúa también sobre el comienzo de la inyección.
Mapas de la ECU
BLIBLIOGRAFIA
https://docs.google.com/document/d/1_X0TvLgCiSc-xk-1vvBuxeFUV9pnHs8pG6RKxqjaGOA/edit?pli=1
http://www.cise.com/portal/notas-tecnicas/item/327-bloques-de-trabajo-en-una-ecu-automotriz.html
http://dspace.espoch.edu.ec/bitstream/123456789/1862/1/65T00033.pdf
http://repositorio.espe.edu.ec/bitstream/21000/2927/1/T-ESPEL-0656.pdf
http://www.cise.com/portal/notas-tecnicas/item/327-bloques-de-trabajo-en-una-ecu-automotriz.html





























