Embed Size (px)
DESCRIPTION
Autonomous Agents Semester Project. Panousis Konstantinos Panagiotis ID : 2008030005 Nao Balance Winter Semester 2012-2013. Introduction. Topic : Balance of NAO in a moving surface acros s Z or X axis . Aim : - PowerPoint PPT Presentation
Citation preview

Autonomous AgentsSemester Project
Panousis Konstantinos PanagiotisID: 2008030005
Nao Balance
Winter Semester 2012-2013

Introduction.
Topic: Balance of NAO in a moving surface across Z or X axis.
Aim:Perception of the movement of the surface and application of an appropriate motion.
Many possible solutions…
In this Project: Use of Force Sensitive Resistors and Inertial Unit.

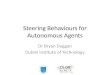
FSRs and Inertial Unit
These sensors measure a resistance change according to the pressure applied.
2 axis gyrometers1 three axis accelerometer.

Initial Observations-Problems
Many values were zero, regardless of stance and movement.
Presence of noise in the non-zero values.Possible jam of perception of the side of the movement.
Combination of movement in 2-axis, produce different results. Needs Extra Recording.

Implemented Solution
Initially:Use of Choregraph and Webots for NAO.Recording values with the use of ALMEMORYWatcher for movements right, left, back and front.
Use of ScriptBox and Python, for checking the values and NAO confirmation of understanding the movement.
Then:Design of Balance Movements using Timeline.
Adjustment of the behaviour for executing designed moves.

Further Problems
With the appliance of the moves that change the stance, the values change again.
Result?Confusion of the position in which NAO is and execution of wrong movement. Danger of NAO falling.
Solution:Re-register the values for each position with the new stance.
Re-adjust the behaviour.

Improvement
Initially I only had one set of moves for each side of movement.
then:Decided to design two moves for each side, resulting in a better balance, if the surface is turned even more.
Same problems as the one set (new Values).
Re-register and appliance.

Results-Possible Improvements
We achieved a better balance in NAO even in large inclination without fall. E.g. NAO would fall in 0.14 inclination in the Z axis, but with our improvement it is balanced even in 0.25+ inclination.
NAO “understands” the side and the movement itself.
Future Improvement: Dynamic reaction of NAO, proportional to the inclination of the surface.
Difficulty Level: Very High.

Demonstration.
Front and Back Left and Right

Questions???
Thank You!