Embed Size (px)
DESCRIPTION
BeagleBone Black. Autonomous Surface Vehicle. Andrew D’Amore, Kristin Therrien, Tom Conway, Billy Lerner—Mechanical Engineering Mike Bogochow, Jeffery Masucci, Cody Noel—Computer Science Graduate Advisors: Damian Manda , Firat Eren Advisor: Professor May-Win Thein - PowerPoint PPT Presentation
Citation preview

Background—MOOS-IvP
ObjectiveThe purpose of the project is to obtain proof of concept of autonomy. Our group has been tasked with developing the logic necessary that is flexible enough to be installed on a range of surface vehicles. The logic must be implemented such that it is able to perform three main tasks:
• Obstacle Avoidance
• Track & Trail
• Travel from a waypoint to a specified end point
The prototype will have the ability to know where it is at all times and arrive at its specified destination while avoiding obstacles.
Autonomous surface vehicles (ASV) are extremely useful for both military and civilian purposes. ASVs can be used for a wide variety of tasks in which human operation is either inefficient and/or too dangerous, including:
• Ocean Mapping
• Surveillance
• Search and Rescue
Background—ASV
Figure 1: Example of an ASV ocean floor mapping. This same
method can also be used for search and rescue.
Figure 2: Example of an ASV completing track and trail with an underwater ROV (Remotely Operated
Vehicle) that is mapping the ocean floor.
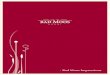
MOOS-IvP is equipped with tools to aid in development as well as mission deployment. One is the pMarineViewer, which gives a graphical representation of the current state of a particular mission, displays a variety data that is being used within MOOS-IvP, and allows control over the mission through programmable buttons. Figure 3 shows this in motion.
MOOSDB
IvPHelmPayloa
dAutonomy
Interface
OtherMOOSApps
BeagleBoneBlack
Arduino
Serial
UltrasonicSensors IMU
Figure 3: The built-in MOOS-IvP graphical mission viewer (pMarineViewer) running a simulation of a
track and trail mission.
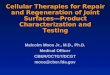
MOOS-IvP Communication• The payload autonomy interface is a MOOSApp
which subscribes to MOOSDB variables that are published by the IvP Helm.
• It then forwards this data to the Arduino over the USB serial connection, with its schematic shown in Figure 4.
• At the same time, the interface reads in sensor data sent from the Arduino and forwards this data to the MOOSDB to be read by the IvP Helm. Data that is sent to the Arduino, includes desired heading and speed.
• Data can then be sent back from the Arduino in the form of position, actual heading and speed, and detected obstacle data.
Figure 4: Diagram displaying the map of the communication between the onboard computer
and the feedback system of sensors.
Autonomous Surface VehicleAndrew D’Amore, Kristin Therrien, Tom Conway, Billy Lerner—Mechanical Engineering
Mike Bogochow, Jeffery Masucci, Cody Noel—Computer Science
Graduate Advisors: Damian Manda, Firat ErenAdvisor: Professor May-Win Thein
NAVSEA POC: Dr. Martin Renken, Keyport NAVSEA
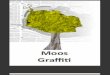
Hull ConstructionThe ASV was chosen to be built instead of purchased due to specific size requirements and the need for accessibility. The hull of the ASV has been crafted from fiberglass for durability and strength. This provides a light-weight body to allow easy maneuverability.
• The dual-motor, dual rudder assembly was chosen to provide sufficient power and precise control for the ASV.
• A latch was constructed for the top of the hull out of plexiglass and clamps. To prevent the possibility of water leaking into the boat, a foam sealant was used to seal the latch top. This assembly can easily be removed to access and update the interior electronics.
Figure 5: (Left) Three-step process of modeling and construction of the hull for the prototype. (Middle) Two DC Brushless motor setup with corresponding Encoder. (Right) Two 120A ESC (Electronic Speed Controller) with their corresponding 22.2V Hyperion
Batteries.
Feedback System
By its nature, autonomy requires a precise feedback system to function efficiently. The feedback system constantly relays environmental and internal information back to the onboard computer (with autonomy installed) such that the autonomy can make accurate decisions.
Visual Feedback System—Playstation®Eye• Used to detect object of known diameter to determine
distance and orientation from said object• Essential for Track & Trail capability
Sonic Feedback System—Ultrasonic Proximity Sensor• 3m range pinging capabilities• Used to detect obstacles in 30° field of view
Heading Feedback System—9 Degrees of Freedom Razor IMU• Triple-axis digital-output gyroscope• 13-bit resolution, ±16g, triple-axis accelerometer• Triple-axis, digital magnetometer
RPM Feedback System—PT series ServoTek Hollow Encoder• Used to control the speed of the ASV• 30 Pulse, 15V
Special Thanks The group would like to acknowledge Sheldon Parent, Paul Lavoie, Scott Cambell, Mike
Conway, and James Abare for allowing us to use their facilities and helping us with various construction tasks. Additional thanks to the UNH NASA MMS QuadSatC team for developing the visual recognition program. We’d also like to thank Tracey Harvey and Jenn Bedsole for
their valuable input on our project.
This research focuses on development of a modular autonomy platform and application to hydrographic surveying. The basic behaviors and controlling electronics developed by the undergraduate ASV team will be applied to a National Oceanic and Atmospheric Administration (NOAA) autonomous platform known as EMILY and all necessary functionality replicated. Additional behaviors will then be developed relating to seafloor mapping, including avoidance of newly detected shoals and automatic development of survey lines to achieve full coverage. A sonar system will be mounted to EMILY for testing these behaviors.
Collaboration with NOAA
Figure 6: Emily, Courtesy of NOAA