Embed Size (px)
DESCRIPTION
materi fisika SMP
Citation preview
LAPORAN PENDAHULUAN
PRAKTIKUM FISIKA DASAR I
I. Identitas Praktikum
Nama :
NIM :
Fakultas :
Jurusan :
Kelompok :
Judul Percobaan : Bandul Gabungan (M9)
II. Tujuan Percobaan :
1. Dapat memahami teori bandul gabungan secara lebih mendalam.
2. Dapat menentukan harga percepatan grafitasi pada suatu tempat dengan
cara bandul gabungan.
III. Alat dan Bahan serta Fungsinya :
1. Tripod
Fungsinya : sebagai tempat menempatkan sekrup penyangga batang logam
2. Batang logam dengan beberapa lubang
Fungsinya : sebagai tempat atau alat pengukur (bandul gabungan) grafitasi
disuatu tempat
3. Sekrup penyangga yang berisi tajam beserta bautnya
Fungsinya : sebagai alat penyangga batang logam
4. Mistar ukur
Fungsinya : sebagai alat ukur atau untuk mengukur beberapa jarak antara
titik lubang pada batang logam
5. Busur derajat
Fungsinya : sebagai alat untuk mengukur besar simpangan pada waktu
batang logam berayun.
6. Stopwatch
Fungsinya : sebagai alat untuk mengukur berapa lama waktu yang
diperlukan batang logam berayun kembali pada kedudukan semula.
IV. Dasar Teori
Didalam menurunkan persamaan-persamaan rumus bandul gabungan.
Maka sebaiknya terlebih dahulu kita harus mengetahui mengenai radius gyrasi dan
teori sumbu sejajar .
1. Radius Gyrasi (jari-jari putar)
Jika kita mempunyai bentuk sembarang sumbu pada benda tersebut, maka
kita akan mendaratkan suatu daerah untuk suatu lingkaran yang berpusat pada
sumbu tadi dan berjari-jari sedemikian rupa.
Jika massa benda itu dipusatkan disuatu titik pada lingkaran itu, maka hal
itu tidak merubah momen kelembabannya terhadap sumbu tadi, jika bidang
lingkaran tegak lurus sumbu. Jarak titik-titik pada sumbu tadi atau sumbu yang
lain atau jari-jari lingkaran tersebut terhadap sumbu dan dinyatakan dengan
simbol ”k”.
Bila massa M dari benda tersebut betul-betul dipusatkan pada jarak R,
maka momen kelembabannya akan sama dengan momen kelembaban di suatu
titik yang sama dengan R yaitu pada jarak K dan dirumuskan sebagai :
I = Io + MK2
Persamaan tersebut dapat dianggap sebagai definisi radius gyrasi. Pada
umumnya, massa benda tidak dapat dianggap berpusat pada pusat massanya
untuk meksud menghitung momen kelembabannya.
2. Teori Sumbu Sejajar
Teori sumbu sejajar berguna sekali momen kelembaban benda terhadap
sumbu sembarang, kalau atau seandainya momen kelembaban benda utu
terhadap sumbu lain yang sejajar diketahui.
Teori ini mengatakan : ”Momen kelembaban benda terhadap sumbu sama
dengan momen kelembabannya terhadap sumbu lewat massa benda dengan
kuadrat jarak antara dua sumbu”.
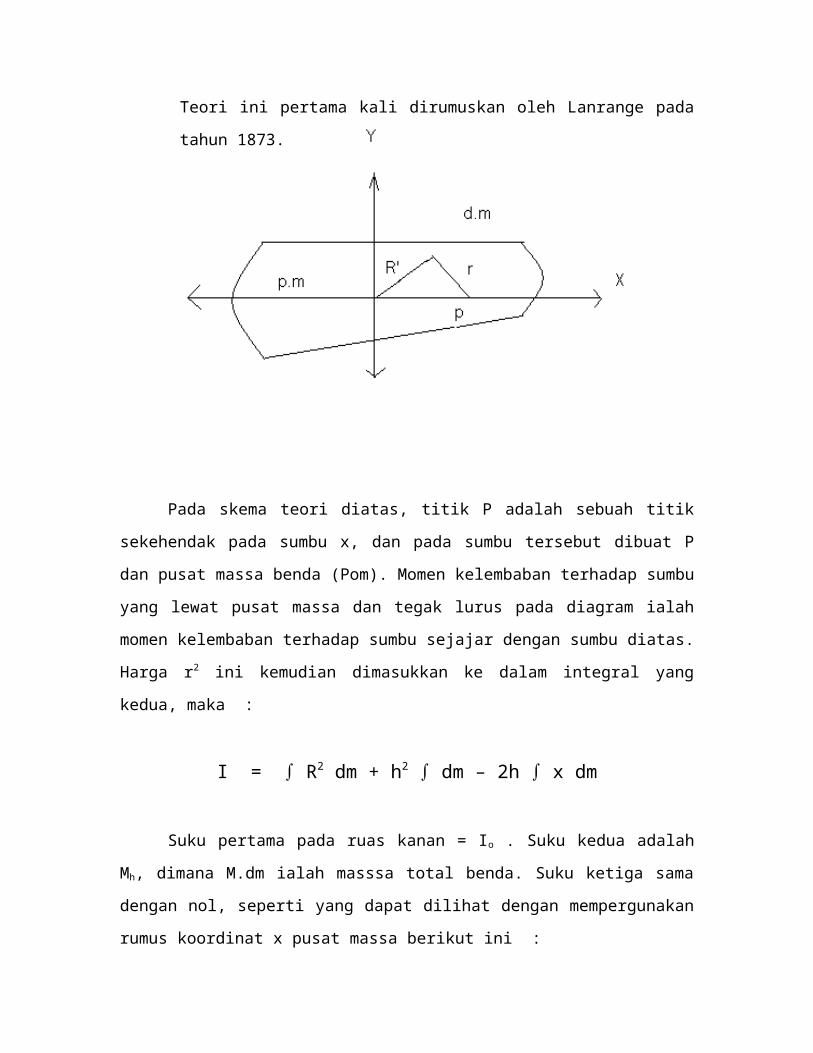
Teori ini pertama kali dirumuskan oleh Lanrange pada tahun 1873.
Pada skema teori diatas, titik P adalah sebuah titik sekehendak pada sumbu x, dan
pada sumbu tersebut dibuat P dan pusat massa benda (Pom). Momen kelembaban
terhadap sumbu yang lewat pusat massa dan tegak lurus pada diagram ialah momen
kelembaban terhadap sumbu sejajar dengan sumbu diatas. Harga r2 ini kemudian
dimasukkan ke dalam integral yang kedua, maka :
I = ∫ R2 dm + h2 ∫ dm – 2h ∫ x dm
Suku pertama pada ruas kanan = Io . Suku kedua adalah Mh, dimana M.dm ialah
masssa total benda. Suku ketiga sama dengan nol, seperti yang dapat dilihat dengan
mempergunakan rumus koordinat x pusat massa berikut ini :
x = ∫ x . dm
∫ dm
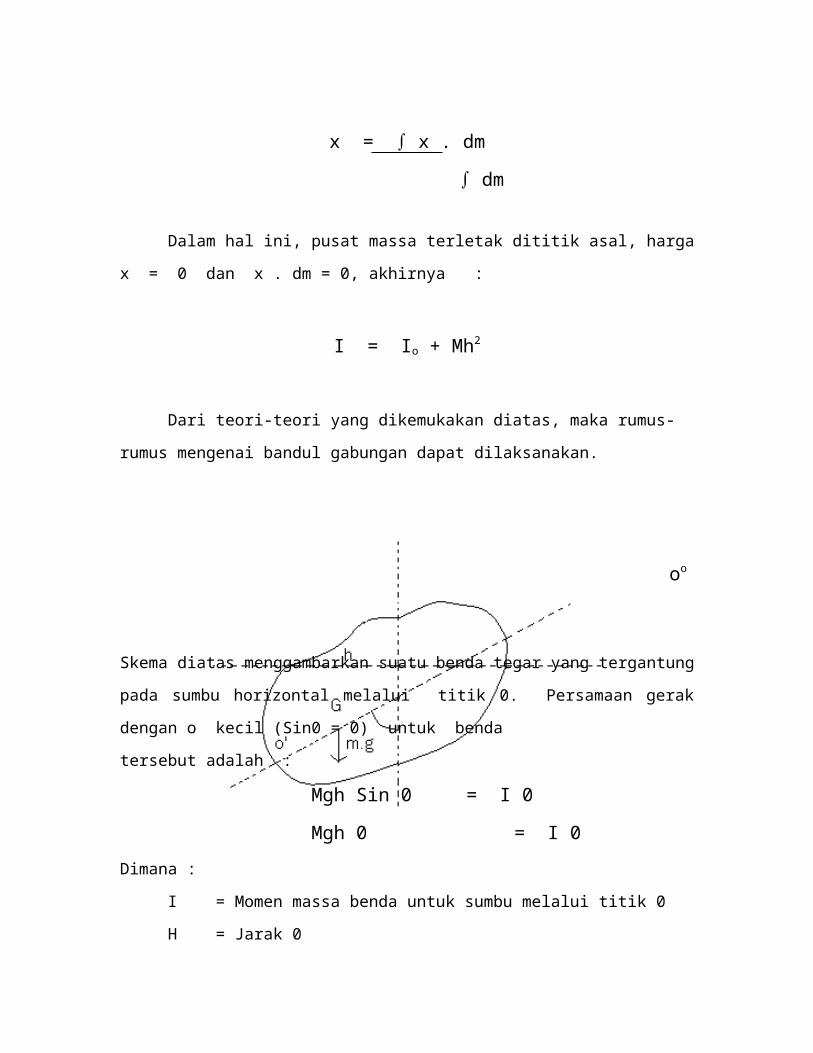
Dalam hal ini, pusat massa terletak dititik asal, harga x = 0 dan x . dm = 0,
akhirnya :
I = Io + Mh2
Dari teori-teori yang dikemukakan diatas, maka rumus-rumus mengenai bandul
gabungan dapat dilaksanakan.
oo
Skema diatas menggambarkan suatu benda tegar yang tergantung pada sumbu horizontal
melalui titik 0. Persamaan gerak dengan o kecil (Sin0 = 0) untuk benda
tersebut adalah :
Mgh Sin 0 = I 0
Mgh 0 = I 0Dimana :
I = Momen massa benda untuk sumbu melalui titik 0
H = Jarak 0
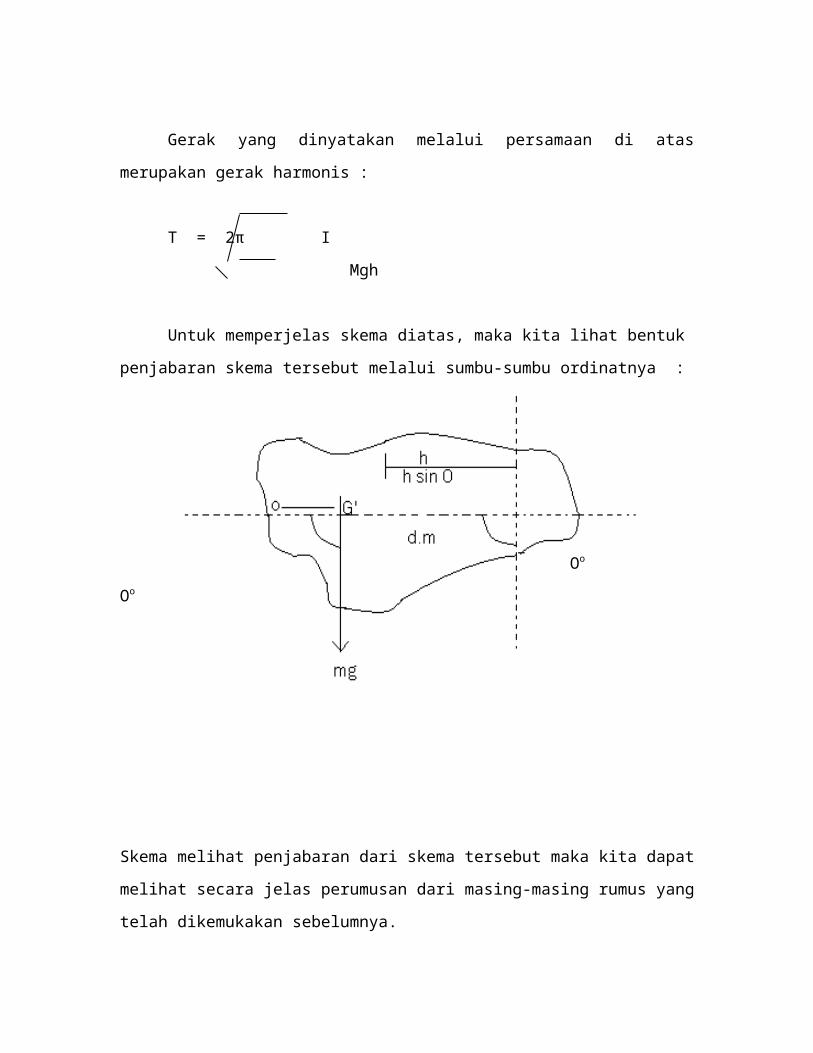
Gerak yang dinyatakan melalui persamaan di atas merupakan gerak harmonis :
T = 2π I
Mgh
Untuk memperjelas skema diatas, maka kita lihat bentuk penjabaran skema
tersebut melalui sumbu-sumbu ordinatnya :
Oo Oo
Skema melihat penjabaran dari skema tersebut maka kita dapat melihat secara jelas
perumusan dari masing-masing rumus yang telah dikemukakan sebelumnya.
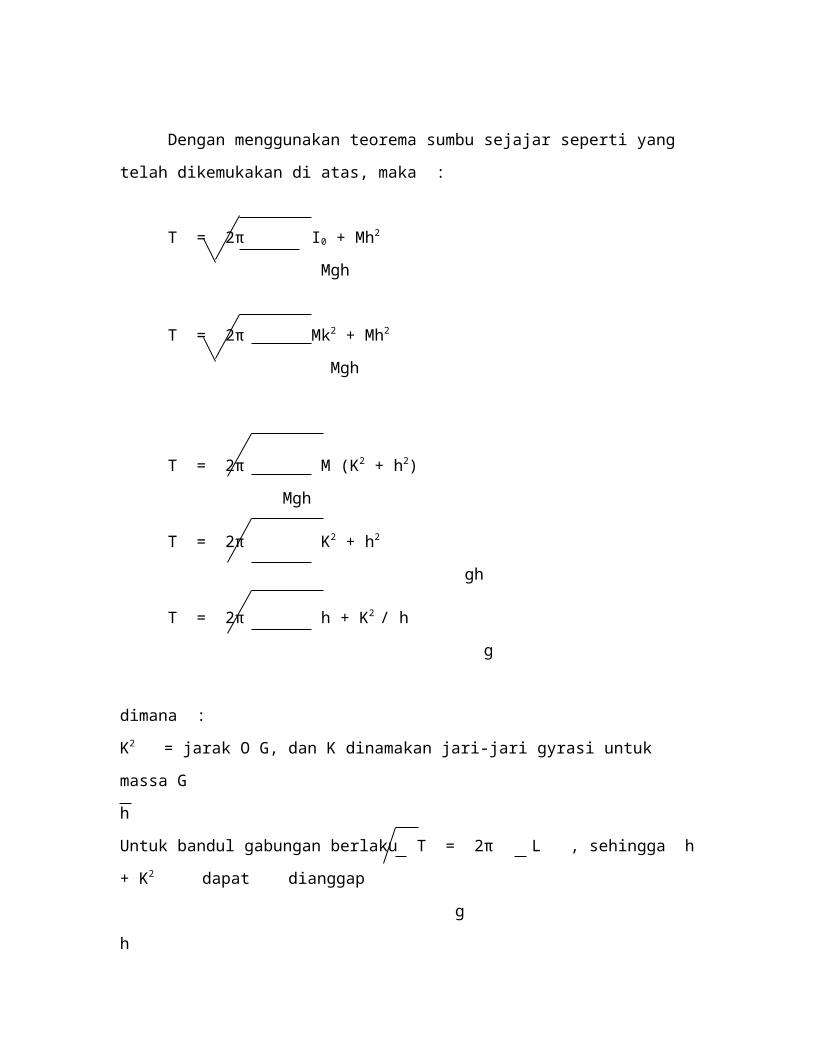
Dengan menggunakan teorema sumbu sejajar seperti yang telah dikemukakan di
atas, maka :
T = 2π I0 + Mh2
Mgh
T = 2π Mk2 + Mh2
Mgh
T = 2π M (K2 + h2)
Mgh
T = 2π K2 + h2
gh
T = 2π h + K2 / h
g
dimana :
K2 = jarak O G, dan K dinamakan jari-jari gyrasi untuk massa G
h
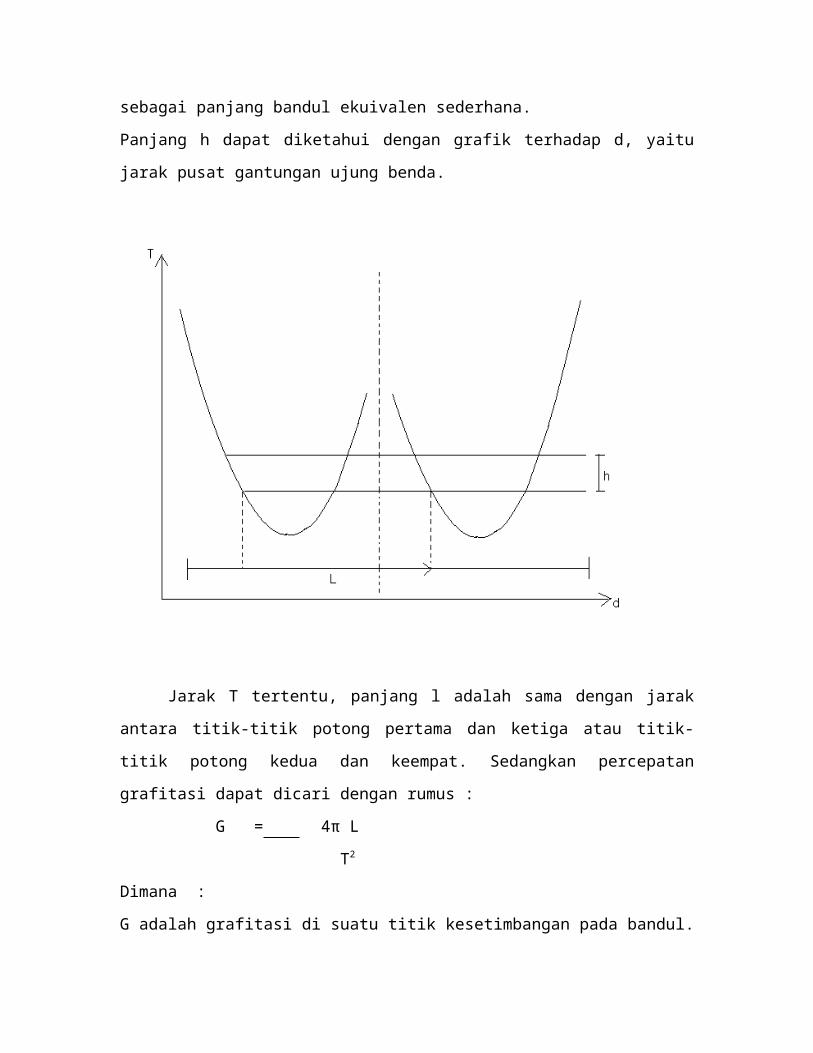
Untuk bandul gabungan berlaku T = 2π L , sehingga h + K2 dapat dianggap
g h
sebagai panjang bandul ekuivalen sederhana.
Panjang h dapat diketahui dengan grafik terhadap d, yaitu jarak pusat gantungan ujung
benda.
Jarak T tertentu, panjang l adalah sama dengan jarak antara titik-titik potong
pertama dan ketiga atau titik-titik potong kedua dan keempat. Sedangkan percepatan
grafitasi dapat dicari dengan rumus :
G = 4π L
T2
Dimana :
G adalah grafitasi di suatu titik kesetimbangan pada bandul.
Dalam bandul gabungan, ada 3 jenis bandul yang akan dipelajari, yaitu :
1. Bandul Sederhana
2. Bandul Fisi
3. Bandul Punturan
Dibawah ini merupakan penjelasan lebih lanjut mengenai ketiga bandul yang diatas,
sebagai berikut :
1. Bandul Sederhana
Bandul sederhana yaitu benda ideal yang terdiri dari sebuah titik massa
yang tergantung pada tali ringan yang tidak dapat memanjang. Bandul gabungan
yang massa partikelnya m dan panjang tali nya l, membentuk sudut dengan arah
partikel. Gaya yang bekerja pada m adalah mg dan T tegangan tali.
2. Bandul Fisis
Bandul Fisis yaitu sembarang benda tegar yang tergantung sehingga benda
dapat berayun dalam bidang vertikal terhadap sumbu yang melalui benda itu. Pada
kenyataan nya semua bandul yang berayun adalah benda fisis.
Sebagai hal khusus tinjaulah sebuah titik massa m yang digantung pada
ujung tali tanpa berat yang panjangnya l, berlaku :
I = m l, M = m, dan d = lSehingga,
T = 2π l
mgd
= 2π l
g
Dalam penentuan grafitasi bandul fisis sering digunakan karena bandul fisis ini
cukup akurat dalam penentuan.
3. Bandul Puntiran
Dalam hal ini ditunjukkan sebuah piringan yang digantung pada sebuah
ujung batang kawat yang dipasang pada pusat massa piringan.
Batang kawat itu dibuat tetap pada penyangga yang kokoh. Pada posisi seimbang
piringan ditarik radial dari pusat piringan ke titik P. Jika piringan dirotasikan ke
bidang horizontal pada posisi Q, maka kawat akan terpuntir. Kawat yang terpuntir
akan melakukan tarikan pada piringan yang cenderung akan kembali ke posisi awal.
Torki pemulihnya ternyata sebanding dengan banyaknya puntiran atau geseran
sudut (Hukum Hooke). Sehingga diperoleh rumus sbb :
J = -k . 0
Persamaan ini adalah syarat gerak harmonik sudut yang dibentuk oleh
bandul sederhana. Apabila batang kawat ditarik secara radial maka akan
menciptakan suatu bandul yang harmonis.
Berbagai contoh benda yang maelakukan gerak harmonik sederhana, antara lain :
gerak benda pada pegas, gerak benda pada ayunan bandul, gerak benda pada
lintasan licin berbentuk busur lingkarang, gerak benda pada bidang datar, gerak zat
cair naik turun pada sebuah pipa U jika diberi gangguan kecil, dan gerak naik-turun
benda yang terapung dalam zat cair jika ditekan ke bawah sedikit kemudian
dilepaskan.
Gerak harmonis adalah istilah lain untuk getaran harmonik atau getaran
harmonik merupakan gerak yang berulang-ulang disebut dengan gerak periodik.
Gerak periodik adalah Gerak yang berulang setiap selang waktu tertentu. Bandul
sebagai penerapan gerak harmonik sederhana.
Penyebab utama melakukan gerak harmonik sederhana adalah resultan
gaya pada benda yang besarnya sebanding dengan besar simpangan benda pada
kedudukan seimbang dan arahnya berlawanan dengan arah gerak benda. Karena
resultannya ini selalu berusaha membawa benda kembali ke titik semula maka
disebut juga gaya pemulih.
Jika pada suatu benda terdapat gaya pemulih maka benda akan melakukan
gerak harmonik sederhana.
V. Prosedur Percobaan
1. Letakkan dan dengan bantuan waterpas atau tripod hingga atas horizontal.
2. Masukkan sekrup penyangga kelubang pertama pada batang logam dan
kencangkan dengan baut.
3. Letakkan dan gantungkan batang logam yang akan disekrup pada tripod
dengan tajam pada sekrup penyangga yang menempel pada tripod.
4. Berikan simpangan awal -50 dan biarkan batang g berayun.
5. Catat waktu yang diperlukan oleh batang dalam melakukan ayunan
beberapa kali (tergantung pada asisten). Lakukan sampai beberapa kali
pengamatan.
6. Ukur dengan mistar jarak lubang yang diberi sekrup terhadap ujung
batang.
7. Ulangi butir 4 hingga 6 untuk lubang berikutnya. Lakukan untuk semua
lubang.
8. Ulangi butir 4 hingga 7 untuk besar simpangan awal -100.
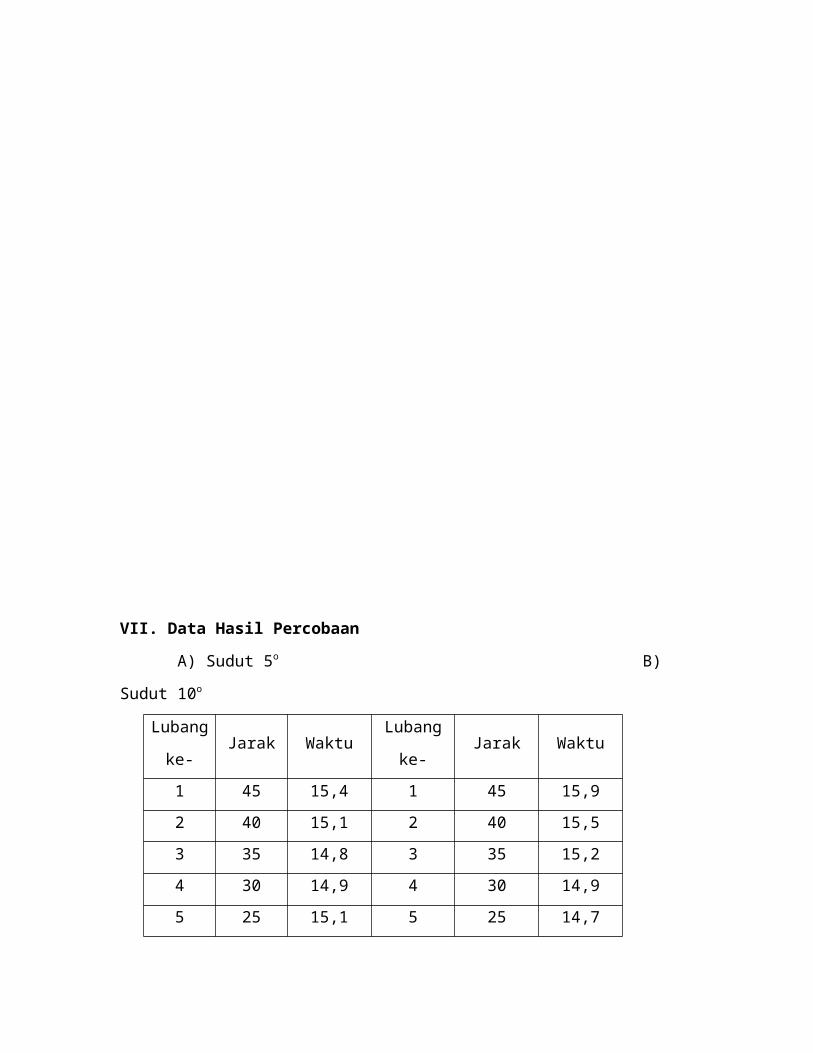
VII. Data Hasil Percobaan
A) Sudut 5o B) Sudut 10o
Lubang
ke-Jarak Waktu
Lubang
ke-Jarak Waktu
1 45 15,4 1 45 15,9
2 40 15,1 2 40 15,5
3 35 14,8 3 35 15,2
4 30 14,9 4 30 14,9
5 25 15,1 5 25 14,7
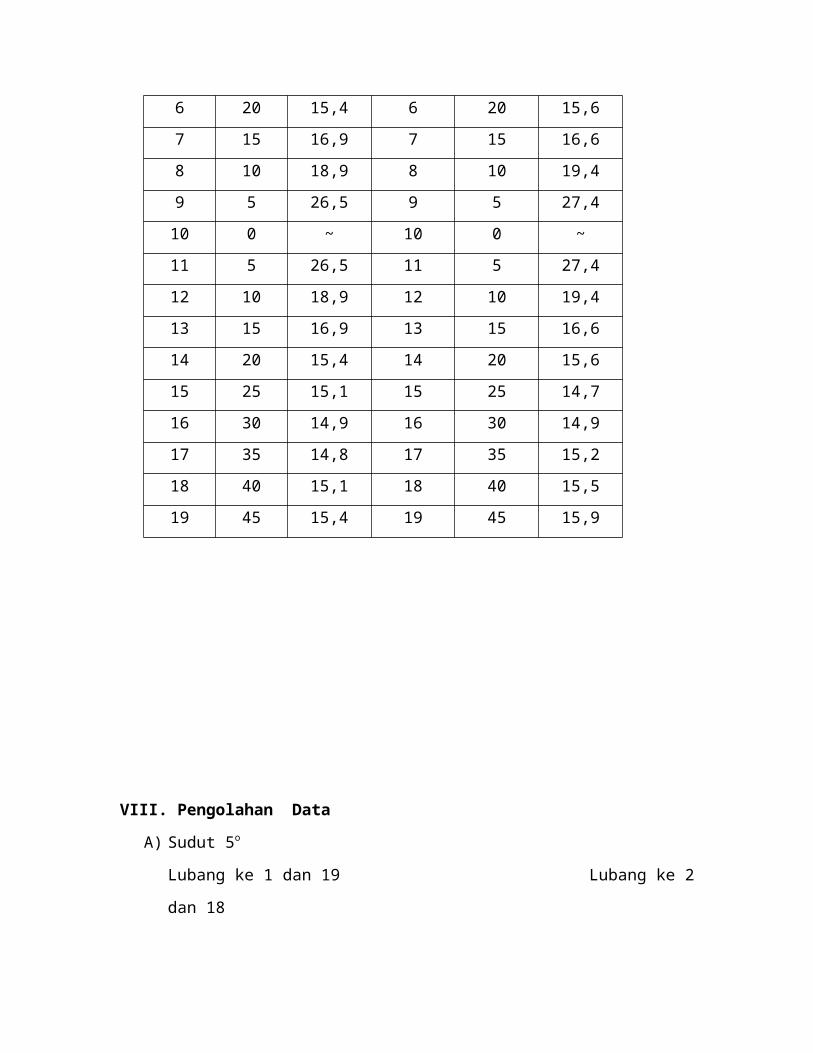
6 20 15,4 6 20 15,6
7 15 16,9 7 15 16,6
8 10 18,9 8 10 19,4
9 5 26,5 9 5 27,4
10 0 ~ 10 0 ~
11 5 26,5 11 5 27,4
12 10 18,9 12 10 19,4
13 15 16,9 13 15 16,6
14 20 15,4 14 20 15,6
15 25 15,1 15 25 14,7
16 30 14,9 16 30 14,9
17 35 14,8 17 35 15,2
18 40 15,1 18 40 15,5
19 45 15,4 19 45 15,9
VIII. Pengolahan Data
A) Sudut 5o
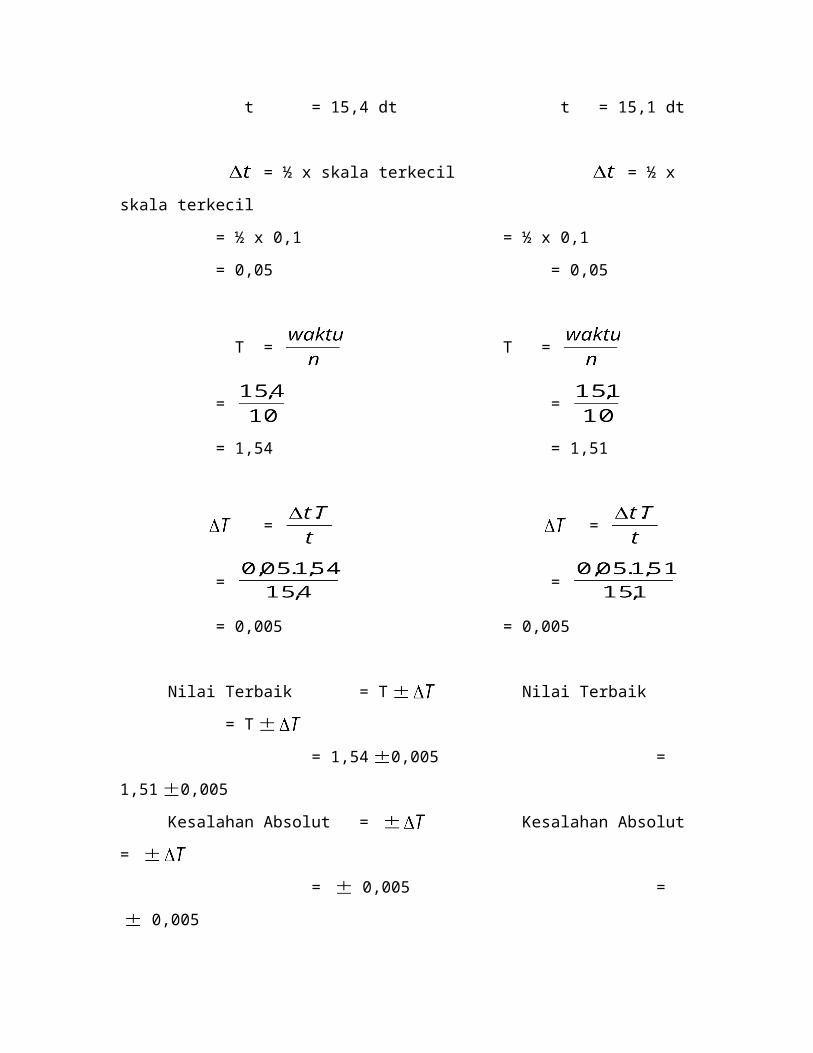
Lubang ke 1 dan 19 Lubang ke 2 dan 18
t = 15,4 dt t = 15,1 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,54 = 1,51
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,54 0,005 = 1,51 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,325% = 0,331%
Lubang ke 3 dan 17 Lubang ke 4 dan 16
t = 14,8 dt t = 14,9 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,48 = 1,49
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,48 0,005 = 1,49 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,339% = 0,336%
Lubang ke 5 dan 15 Lubang ke 6 dan 14
t = 15,1 dt t = 15,4 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,51 = 1,54
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,51 0,005 = 1,54 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,331% = 0,325%
Lubang ke 7 dan 13 Lubang ke 8 dan 12
t = 16,9 dt t = 18,9 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,69 = 1,89
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,69 0,005 = 1,89 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,30% = 0,27%
Lubang ke 9 dan 11 Lubang ke 10
t = 26,5 dt t = ~ dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 2,65 = ~
= =
= =
= 0,005 = ~
Nilai Terbaik = T Nilai Terbaik = T
= 2,65 0,005 = 0 0
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,19% = 0 %
B) Sudut 10o
Lubang ke 1 dan 19 Lubang ke 2 dan 18
t = 15,9 dt t = 15,5 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,59 = 1,55
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,59 0,005 = 1,55 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,314% = 0,323%
Lubang ke 3 dan 17 Lubang ke 4 dan 16
t = 15,2 dt t = 14,9 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,52 = 1,49
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,52 0,005 = 1,49 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,329% = 0,336%
Lubang ke 5 dan 15 Lubang ke 6 dan 14
t = 14,7 dt t = 15,6 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,47 = 1,56
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,47 0,005 = 1,56 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,34% = 0,32%
Lubang ke 7 dan 13 Lubang ke 8 dan 12
t = 16,6 dt t = 19,4 dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 1,66 = 1,94
= =
= =
= 0,005 = 0,005
Nilai Terbaik = T Nilai Terbaik = T
= 1,66 0,005 = 1,94 0,005
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0,005
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,30% = 0,26%
Lubang ke 9 dan 11 Lubang ke 10
t = 27,4 dt t = ~ dt
= ½ x skala terkecil = ½ x skala terkecil
= ½ x 0,1 = ½ x 0,1
= 0,05 = 0,05
T = T =
= =
= 2,74 = ~
= =
= =
= 0,005 = ~
Nilai Terbaik = T Nilai Terbaik = T
= 2,74 0,005 = 0 0
Kesalahan Absolut = Kesalahan Absolut =
= 0,005 = 0
Kesalahan Relatif = x100% Kesalahan Relatif = x100%
= x100% = x100%
= 0,18% = 0 %
IX. Pertanyaan Dan Jawaban
1) Buktikanlah persamaan berikut :
T = dan T =
Jawab :
Sin = …… ( a ) ; T =
F = m.g.Sin …( b ) T =
Subtitusi persamaan a dan b : T =
F = T =
- F = -k.x = -m.w.x T =
= -m.w.x
w = = =
=
=
T =
2) Buatlah grafik T terhadap d. Carilah untuk minmal 8 T yang berbeda lalu
hitung gaya g nya. Berikan pendapat saudara mengenai pengaruh besar sudut
terhadap penghitungan gaya g. Bagaimana saran saudara untuk mendapatkan jari-
jari gaya gyrasi ( k ) dari grafik T terhadap d tersebut.
Jawab :
Grafik antara T terhadap d untuk sudut 5o
Dari grafik simpangan 5o
T dan L Nilai T Nilai L Nilai
ke- L x 5
1 1,53 13 65
2 1,52 13 65
3 1,50 13,3 66,5
4 1,49 12,9 64,5
5 1,48 12,9 64,5
6 1,49 13,1 65,5
7 1,51 12,7 63,5
8 1,52 13 65
9 1,53 12,7 63,5
No T L T2
1 1,53 65 2,3409 27,7670 - 0,7406
2 1,52 65 2,3104 28,1336 - 0,3740
3 1,50 66,5 2,2500 29,5555 1,0479
4 1,49 64,5 2,2201 29,0527 0,8451
5 1,48 64,5 2,1904 29,4467 0,9391
6 1,49 65,5 2,2201 29,5031 0,9955
7 1,51 63,5 2,2801 27,8496 - 0,6580
8 1,52 65 2,3104 28,1336 - 0,3740
9 1,53 63,5 2,3409 27,1263 -1,3813
256,568 0,0333
2TL
= = = 28,5076 cm/s2
= = = 0,0333 cm/s2
Nilai Terbaik = 2TL
= 28,5076 0,0333
Kesalahan Absolut = = 0,0333
Kesalahan Relatif = x100% = x100% = 0,1%
G = = = 11,125 m/s2
Grafik T terhadap d untuk 10o
T dan L
ke-Nilai T Nilai L
Nilai
L x 5
1 1,58 12,5 62,5
2 1,56 12,3 61,5
3 1,54 12,0 60,0
4 1,52 11,6 58,0
5 1,49 10,9 54,5
6 1,49 10,5 52,5
7 1,51 11,1 55,5
8 1,56 12,2 61,0
9 1,58 12,4 62,0
No T L T2
1 1,58 62,5 2,4964 25,0360 - 0,2417
2 1,56 61,5 2,4336 25,2712 - 0,4769
3 1,54 60,0 2,3716 25,2994 0,5051
4 1,52 58,0 2,3104 25,1039 0,3096
5 1,49 54,5 2,2201 24,5484 - 0,2459
6 1,49 52,5 2,2201 23,6475 - 1,1468
7 1,51 55,5 2,2801 24,3410 - 0,4533
8 1,56 61,0 2,4336 25,0657 0,2714
9 1,58 62,0 2,4964 24,8359 0,0416
223,149 0,0003
2TL
= = = 24,7943 cm/s2

= = = 0,00003 cm/s2
Nilai Terbaik = 2TL
= 24,7943 0,00003
Kesalahan Absolut = = 0,00003
Kesalahan Relatif = x100% = x100% = 0,0001%
G = = = 9,779 m/s2
Cara yang digunakan untuk mendapatkan jari-jari gaya gyrasi melalui grafik T terhadap d
adalah dengan menentukan l pada sebuah T secara sembarang. Kemudian hitung
ketinggian l terhadap bidang d ( h ) dan masukkan persamaan :
X. Analisa Hasil Percobaan
Dilakukannya percobaan ini bertujuan untuk memahami teori bandul
gabungan secara lebih mendalam atau lebih jelas dan juga bertujuan untuk
mengetahui harga atau besarnya percepatan grafitasi pada suatu tempat tertentu
dengan menggunakan teori bandul gabungan tersebut dan alat yang kita pergunakan
adalah tripod yang digunakan untuk meletakkan sekrup, batang logam yang
berlobang dan jumlah lubangnya adalah 19 (sembilan belas) lubang. Sekrup
penyangga beserta bautnya, mistar ukur, busur derajat, stopwatch, dan waterpast,
percobaan dilakukan dengan mengayunkan batang logam yan berlubang dari lubang
pertama sampai dengan lubang ke sembilan dan menggunakan sudut 5o dan sudut
10o kita ayunkan dalam 10 kali ayunan dan kita ulangi lagi sampai mencapai data
yang lengkap.
Dan pada hasil percobaan tersebut kita dapat menentukan perioda (T) yang menurut
persamaan umumnya dapat ditulis dengan :
T = 1 / fDengan :
T adalah Perioda dengan satuan sekon
F adalah frekuensi dengan satuan Hz
Jadi menurut data diatas ataupun rumus diatas perioda adalah waktu yang
diperlukan untuk melakukan satu kali getaran. Tapi perioda juga dapat ditentukan
juga melalui rumus atau persamaan sebagai berikut jika ampitudonya kecil :
T = 2π m = 2π . m atau T = 2π l
k mg/L g
Perioda juga dapat dinyatakan juga dengan rumus atau dengan persamaan gerak
harmonik sederhana pada ayunan bandul sederhana :
T = 2π I
mgh
XI. Kesimpulan
Bandul gabungan adalah ayunan benda yang dihubungkan dengan batang logam,
tali atau lainnya, gerakan benda dari A' ke A lalu ke A'' dan kembali ke A'.
Besarnya sudut atau simpangan tidak mempengaruhi harga percepatan grafitasi
pada tempat yang sama. Bandul gabungan ini adalah salah satu cara untuk mencari
besarnya grafitasi disuatu daerah dengan menggunakan persamaan :
g = 4π2 . L / T2
dimana :
L = panjang tali ayunan atau batang logam
T = periode gerakan ayunan
XII. Sumber Kesalahan
1. Kurang tepat dalam menggunakan waterpas untuk melakukan pengukuran
kedataran bidang.
2. Kurang tepat dalam penggunaan stopwatch dalam atau pada saat
menentukan waktu getaran.

3. Kurang tepat dalam melepaskan bandul dengan mulai stopwatch
digunakan.
4. Kurang tepat dalam menentukan sudut dengan menggunakan busur
derajat.
5. Kurang teliti dalam menghitung.
XIII.Daftar Pustaka
Sutrisno, ”Fisika Dasar1” ITB, Bandung
Resnik, Robert dan David Halliday, ”Fisika Dasar 1” Troy, New York.
Fauzi, Asraf. L, 1981. “Kamus Istilah Fisika” IPMEMS, Surabaya