Embed Size (px)
Citation preview

Introduction!
During shod running, the extra mass of the shoecould explain the higher oxygen uptake (V̇O2) ob-served when compared to barefoot running [8].Indeed when comparing barefoot, shoes andshoes plus orthotics, in running conditions, Bur-kett et al. [8] concluded that the changes in V̇O2
may be more attributed to the additional massassociated with shoes than to the mechanical al-terations in the running pattern. However, to thebest of our knowledge, none of the studies re-ported in the literature focus on the effect of theshoe itself without mass consideration [8,9,22,23]. It is then difficult to distinguish which ofthese two factors, mass or shoe, is responsiblefor the higher energy consumption when shodrunning is compared to barefoot running. Con-cerning the mass effect, studies in related areastend to support the theory of Burkett et al. [9,23,26]. Frederick [20], for example, reported that anextra mass of 100 g per foot yielded a 1% increaseon metabolic cost. Moreover, Martin [26] foundthat the addition of 0.5 or 1 kg on the feet duringsubmaximal running leads to a significant in-
crease in V̇O2. They concluded that the higherphysiological demand was directly related to theincreases of mechanical work. However, accord-ing to their results, the mechanical work in-creases were attributed almost totally to the iner-tial changes in the lower extremity, rather thansome major modifications in the kinematics ofthe movements. Nonetheless, Frederick et al.[22] reported a significant reduction in oxygenconsumption when comparing running with anair cushion type shoe, which weighed slightlymore (677.8 g/pair) than a traditional shoe(646.9 g/pair). Therefore, the mass of the shoedoes not seem to be the only factor whichmay af-fect running economy. In 1984, Frederick [20]compared two studies, available in the literature,dealing with the effect of shoe weight on the en-ergetic cost of running: while Catlin and Dressen-dorfer [9] used two types of shoes, with differentweights, whilst Frederick et al. [21] employedidentical shoes on which weights were added.According to Frederick [20], the discrepancy inthe oxygen cost of load carriage between thetwo studies was probably due to the fact thatthe two shoes used by Catlin and Dressendorfer
Abstract!
The higher oxygen consumption reported whenshod running is compared to barefoot runninghas been attributed to the additional mass of theshoe. However, it has been reported that wearingshoes also modified the running pattern. The aimof this study was to distinguish the mass andshoe effects on the mechanics and energeticswhen shod running. Twelve trained subjects ranon a 3-D treadmill ergometer at 3.61m •s–1 in sixconditions: barefoot, using ultra thin diving socksunloaded, loaded with 150 g, loaded with 350 g,and two shoe conditions, one weighing 150 gand another 350 g. The results show that there
was a significant mass effect but no shoe effectfor oxygen consumption. Stride frequency, ante-rior-posterior impulse, vertical stiffness, leg stiff-ness, and mechanical work were significantlyhigher in barefoot condition compared to shod.Net efficiency, which has metabolic and mechan-ical components, decreased in the shod condi-tion. The mechanical modifications of runningshowed that the main role of the shoe was to at-tenuate the foot-ground impact by adding damp-ing material. However, these changes may lead toa decrease of the storage and restitution of elasticenergy capacity which could explain the lowernet efficiency reported in shod running.
Barefoot-Shod Running Differences:Shoe or Mass Effect?
Authors C. Divert1,2, G. Mornieux2,3, P. Freychat4, L. Baly4, F. Mayer5, A. Belli2
Affiliations The affiliations are listed at the end of the article
Key wordsl" mechanicsl" metabolicl" loadl" footwearl" efficiency
accepted after revisionJuly 13, 2007
BibliographyDOI 10.1055/s-2007-989233Published online Nov. 16, 2007Int J Sports Med 2008; 29:512–518 © Georg ThiemeVerlag KG Stuttgart • New York •
ISSN 0172-4622
CorrespondenceDr. Caroline DivertUniversité de ValenciennesLAMIHLe Mont Houy59313 Valenciennes Cedex [email protected]
512
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics

were different enough in design features such as the amount ofcushioning they provided to cause effects on the economy of lo-comotion that were independent of weight effects alone. Conse-quently, in addition to the influence of the mass, the mechanicalmodifications induced by wearing shoes have to be considered[17,22].Compared to barefoot, running with shoes has been said to leadto different advantages for the human locomotion such as “rearfoot control”, “cushioning”, “shock distribution” or “heel stabili-sation”. However, shod running also leads to changes in the me-chanical parameters of running as reported by two authors [15,17]. According to De Wit et al. [15], for example, runners adopt aflatter foot placement to attempt to limit the local pressureunderneath the heel when running barefoot. Additionally, signif-icantly higher leg stiffness during the stance phase was found inthe barefoot condition by the same authors. Recently, Divert etal. [17] reported significant differences in runningmechanics be-tween barefoot and shod running. Indeed, barefoot runningshowed mainly higher stride frequency, lower contact and flighttime, lower passive peak (1.48 versus 1.70 body weight [BW]),higher braking and pushing impulses and higher pre-activationof the triceps surae muscles than shod running. Nevertheless,these two latter studies did not determine whether the shoemass and/or wearing a shoe were the reasons for the modifica-tions observed. According to Martin [26], adding mass (< 0.5 kgper foot) to the feet does not lead to any significant modificationin temporal and kinematic data during running [26]. Because theshoes used in Divert et al. [17] and DeWit et al. [15] were neutraljogging shoes (weighing less than 500 g), we could argue thatmodifications observed in the two latter studies were yieldedby the mechanical properties of the shoes rather than the shoemass.As wearing a shoe has been shown to alter running mechanics[15,17], the question arising was whether it also may affect run-ning economy. According to Bosco et al. [6,7], neural-mechanicaladaptations in barefoot running could enhance the storage andrestitution of elastic energy at the level of the ankle extensorswhich could explain the lower metabolic cost reported in bare-foot running [8]. Additionally, compared to shod running, bare-foot running represents the natural means of locomotion whererunners do not need to adjust their running patterns [16]. Theseresults reinforce the fact that barefoot running is the less fatigu-ing means of running and leads to a lower energy consumption.While the mass seems to be the main factor for the higher en-ergy consumption in shod running according to Burkett et al.[8], the role of the shoe itself should not be omitted, as altera-tions of the mechanical parameters were encountered duringshod running compared to barefoot running [15–17]. However,to the best of our knowledge, the separate effects of the massand the shoe itself in the comparison between barefoot and shodrunning have never been explored. The aim of the present studywas to clearly identify and separate the effects of shoe wear andshoe mass on metabolic and mechanical parameters of shodrunning. It was firstly hypothesised that the mass would mainlyinfluence the energetics of running without any alteration of themechanics, and secondly that wearing a shoe would influencethe mechanics of running and consequently the energetics.
Materials and Methods!
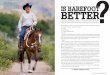
Twelve healthy male runners volunteered for this study. They allhad training experience in long distance competition runningand reported no injury at the time of experiment. Age of the sub-jects was 24 ± 5 (mean ± standard deviation) years. Body mass(BM) was 66 ± 8 kg, height and leg length were 176 ± 6 and91.4 ± 4.4 cm, respectively. Approval for the project was obtainedfrom the Local Committee on Human Research. After being in-formed of the nature of the study, runners gave their writtenconsent to participate in this study.The subjects came twice to the laboratory for two test sessions.The primary purpose of the first test session was to get all thesubjects used to the treadmill, such that each of them had ad-equate time to become habituated to treadmill running prior tothe introduction of the experimental load conditions [32]. Dur-ing the second session, the subjects were asked to perform sixrunning bouts of 4 minutes at 3.61m •s–1 (13 km •h–1, their train-ing speed) in a balanced order. They ran on a treadmill ergom-eter [3] barefoot (BF), in diving socks (ultra thin; 1.5mm; 50 g;l" Fig. 1) (SK50), in light loaded diving socks (SK150; 150 g persock), in diving socks heavy loaded (SK350; 350 g per sock),where SK150 and SK350 were the SK50 socks loaded, and in twoconditions of shoes of similar construction: “light” shoes(SH150; 150 g per shoe; sole material: EVA; sole thickness:22mm) and in “normal” shoes (SH350; 350 g per shoe; sole ma-terial: EVA; sole thickness: 25mm). Masses of 5 g were handsewn evenly on the diving socks to load them at 150 and 350 gand to maintain the same coordinates of the centre of mass rela-tive to the shoes independently of the mass added. A rest periodof 2 minutes separated the bouts. The protocol was preceded bya warm-up period of 10 minutes, comprising 5 minutes pershoes (SH150 and SH350).The oxygen consumption (V̇O2, mL •min–1 •kg–1) relative to thetotal mass of the subject (BM + shoe mass) was determined foreach running condition from the expired gases collected inDouglas bags during the last 30 s of each running period,through a low-resistance Hans Rudolph valve 2700 (Hans Ru-dolph, Kansas City, MO, USA). Subsequent volume determina-tions were carried out in a balanced Tissot spirometer (Gymrol,Roche-la-Molière, France). Fractions of gases were determinedwith a zirconcell O2 analyser and an infrared CO2 analyser (Ser-vomex 2240, Crowborough, England).
Fig. 1 Diving sockused for barefoot simu-lation (ultra thin;1.5mm; 50 g) (SK50).Grey bars highlight thelocation of massesevenly hand sew toload the diving sock at150 (SK150) and 350 g(SK350) while maintain-ing the same coordi-nates of the centre ofmass comparable tothat when running withshoes independently ofthe mass added.
513
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics

A treadmill dynamometer (ADAL 3D, HEF-Tecmachine, Andre-zieux-Boutheon, France) was used to measure three-dimension-al ground reaction forces (3-D GRFs) [17]. Using the same cali-bration procedure as Belli et al. [3], the treadmill static non-linearity has been calculated and reported at 0.3 ± 0.2% in thevertical direction, 1.4 ± 0.3% in the anteriorposterior and0.7 ± 0.4% in the mediolateral directions. The resonant frequencyof the treadmill (when the treadmill was hit with a hammer)was 147Hz in vertical and 135Hz in anterior-posterior direction.Those characteristics are satisfactory with respect to the fre-quency spectrum of ground reaction forces of running [24,33,34]. The reproducibility (0.1% non-reproducibility) was also highand the error to the position (1%) was comparable with thatmeasured in treadmill-mounted force platforms [25].The entire treadmill is mechanically isolated. All the compo-nents, including the motor and the belt, were mounted on a sin-gle metal frame, as rigid as possible, and fixed to the groundthrough three-dimensional force transducers. This specifictreadmill has the main advantage of allowing fast recording andanalysis of forces from a large number of steps at a fixed velocity.Because the treadmill ergometer measures the GRF of many suc-cessive steps, errors from variation between and asymmetry ofsteps [2,4] can be reduced.To the best of our knowledge, only two authors [1,17] reporteddata of patterns and amplitudes of the GRF during running onthe treadmill ADAL 3D. Both studies reported data in agreementwith those reported in the literature at comparable velocities
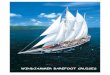
(from force platforms: Cavagna [10]; Nilsson and Thorstensson[31]; from force treadmill: Kram et al. [24]).Software (ADIRUN© Andrerieux-Bouthion, France) was used tocollect and process vertical (Fz), anteroposterior (Fy) and medio-lateral (Fx) components of the GRF applied by the runner to thetreadmill. 3-D GRFs were sampled at 1000Hz during the last 20 sof each bout. Forces were low pass (30Hz) filtered with a fourthorder Butterworth filter. Since the mediolateral work is negli-gible in running [12], the component of the GRF in this directionwas not analysed. Based on an average of almost 60 consecutivesteps, the mean components of GRF could be considered as morerepresentative than just on one contact. The GRFs were then nor-malised relative to the duration of each stride, which was de-fined as the time elapsed from a foot strike to the next footstrike.Passive and active peaks (Fz1 and Fzmax respectively, expressedin BW) and vertical impulse (Iz) of the vertical component of theGRF; anteriorposterior impulses (Iy1 – braking – and Iy2 – push-ing – respectively, expressed in BW times second [BW •s]) of theanteriorposterior component of the GRF; stride frequency (Sf inHertz [Hz]); and contact time (CT) were measured (l" Fig. 2). Ac-cording to Cavagna et al. [12], at constant running speed, brakingand pushing impulses are equal and opposite. During the rest ofthe study we will focus on the braking impulse only (Iy1). Strideduration (SDur) was expressed in seconds (s) and contact timewas expressed in percentage of stride duration (%SDur).
Fig. 2A and B Vertical component (A) and anteri-or-posterior component (B) of the ground reactionforces of one representative subject (one trial inSH150, one trial in SK150) at 3.61m •s–1. Fz1, Fzmax,Iz, CT, Iy1 and Iy2 are respectively the passive andactive peak, the vertical impulse, the contact time,the braking and the pushing impulse. The subjectconsidered used a rear foot technique in SH150 anda fore foot technique in SK150 (A).
514
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics

In order to calculate kinetic and potential work, the method de-scribed by Cavagna [10] was applied as follows: from the meanhorizontal component of the GRF, the anterior-posterior acceler-ation (ay) was calculated as ay = Fy/m, where m is the subject’sBM (in kg) and Fy is the mean anterior-posterior GRF (in N). Thevariations of the horizontal speed of the CMwere determined byintegrating the mean anterior-posterior acceleration over thestep. The initial velocity of the runner (set theoretically at3.61m •s–1) was accurately measured by the treadmill thanks tothe optical encoder (Hengstler RJ100 2V, Hengstler, Aulnay sousBois, France). Then this initial velocity was added to the varia-tions computed from the integration of the acceleration to ob-tain the instantaneous speed of the runner with respect to thebelt. From the curve representing the horizontal speed of theCM over the step, the maximal (vmax) and minimal (vmin) speedswere extracted (l" Fig. 3). The kinetic work (Wkin) done to accel-erate the body forward (in J) was then calculated as:
Wkin = 0.5 ×m × (vmax2–vmin
2)
During contact, the vertical acceleration (az) was calculated asaz = (Fz/m)–g, where Fz is the vertical GRF (in N). The az was inte-grated twice to obtain the total vertical displacement of thecentre of mass (CM) (Dztot; l" Fig. 4). Finally, the potential work(Wpot) done to raise the CM (in Joules, J) was calculated by mul-tiplying the total vertical displacement (Dztot) by the subject’sBW. Then, assuming that no transfer occurred between kineticand potential energies in running [12] and that the mediolateralwork was negligible [10], external work (Wext) was the sum ofWkin and Wpot. Internal work (Wint) was calculated accordingto Minetti [29] as:
Wint = Sf × v2 × [1 + (d/(1–d))2] × 0.1 (1)
Where the 0.1 factor is a dimensionless term accounting for limbgeometry and fractional mass, Sf (in Hz) is the stride frequency, v(in m •s–1) the progression speed and d the duty factor, i.e., thefraction of the stride period at which each foot is in contact withthe ground [29].The total work (Wtot) was the sum of Wext andWint.For each condition, the net efficiency (hnet) was computed as:
hnet =Wtot/(V̇O2net × EqO2) (2)
In this equation, V̇O2net (L •s–1 •kg–1) is the oxygen consumptionmeasured (V̇O2) minus the 0.083mL •s–1 •kg–1 value correspond-ing to the y-intercept of the oxygen consumption-speed rela-tionship established by Medbo et al. [28]. EqO2 is the energeticequivalent of oxygen (J •L–1) calculated by:
EqO2 = 21300 × [(RER–0.7)/0.3] +19600 × [(1–RER)/0.3]if RER < 1 and EqO2 = 21300 if RER > 1
where RER is the respiratory exchange ratio determined by theratio of the carbon dioxide production (L •min–1) to the oxygenuptake (L •min–1).Vertical stiffness (Kvert) [11] and leg stiffness (Kleg) [18] weremeasured from kinetic data given by the treadmill ergometer.As commonly used in literature, the running motion has beenstudied by modelling the runner as a spring-mass system: themass representing the total BM and the spring the behaviour ofthe support leg [5,27].The peak downward displacement of the CM (Dz) (l" Fig. 4) wascalculated from the double integration of the vertical accelera-tion (az) (l" Fig. 4; see Avogadro et al. [1] for further details).Vertical stiffness (Kvert, kN •m–1) was calculated as the ratio ofthe maximal vertical component of the GRF (Fzmax) to the peakdownward displacement (Dz) (Fig. 4) of the CM during foot con-tact [11].
Kvert = Fzmax/Dz (3)
Leg compression (DL) was calculated from the peak downwarddisplacement of the CM (Dz), horizontal speed (v), contact time(CT) and the leg length (L0) [1]. The leg length (L0: measured asthe vertical distance in cm from the ground to the greater tro-chanter during standing) of both right and left legs were mea-sured for all the subjects.
DL = Dz + L0–[L02–(0.5 × v × CT)2]1/2 (4)
Leg stiffness (Kleg, kN •m–1) was calculated as the ratio of themaximal vertical component of the GRF (Fzmax) to the maximalleg spring compression (DL), both occurring at mid-stance [18].
Kleg = Fzmax/DL (5)
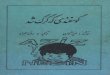
Fig. 3 Typical curve of horizontal speed of the centre of mass (CM) duringrunning at 3.61m •s–1. vmax and vmin are respectively the maximal andminimal horizontal speed of CM during a whole step.
Fig. 4 Typical curve of vertical displacement of the centre of mass (CM)during running at 3.61m •s–1. Dz and Dztot are respectively the peakdownward displacement and the total vertical displacement of CM.
515
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics

All results presented were expressed as means ± SD. Paired t-tests were used to explore mechanical andmetabolic differencesbetween BF and SK50. A 2-by-2 ANOVA, with repeated measures(shoe [SK versus SH] by mass [150 versus 350 g]) was conductedon all dependant variables. When a significant shoe-by-mass in-teraction was reported, Tukey-Kramer post hoc analyses wereperformed to determine where the difference occurred. P < 0.05was considered as statistically significant. Relationship betweenV̇O2 and Kleg was determined by standard linear regression andcalculation of the determination coefficient R2.
Results!
There was no difference between BF and SK50 concerning bothmechanical and metabolic parameters.Concerning temporal data, Sf was influenced by shoe and mass(l" Table 1). CT increased with shoe (p < 0.0001) whereas Sf de-creased due to shoe and mass influence (p < 0.01 for the shoe ef-fect; p < 0.05 for themass effect). Both Iz and Iy1were influencedby wearing a shoe. Iz was also influenced by the mass. Kleg andKvert decreased due to the shoe and the mass effect. Wtot de-creased when runners were wearing a shoe. Fz1 was not influ-enced by the shoe, however, it must be observed that nine ofthe twelve subjects ran without displaying the Fz1 (“passive”)peaks in BF, SK50, SK150 and SK350 (l" Fig. 2A). Shoe ×mass inter-action effects were found for CT, Kleg and Kvert. The Tukey-Kramer post hoc test showed that shoe effect occurred for bothconditions of mass (150 and 350 g) except for the Kvert parame-ter. CT, Kleg and Kvert were affected by mass in shoe conditiononly (i.e., between SH150 and SH350).
V̇O2 was influenced by mass (p < 0.01) whereas hnet was signifi-cantly influenced by the shoe (p < 0.01). hnet in SH350 was 3.6%significantly lower than SK350. The highest hnet among the fourconditions was obtained in SK150 (58.0 ± 4.7%) (l" Table 1).No relationship between V̇O2 and Kleg (R2 = 0.03) has beenfound.
Discussion!
As none of the mechanical and metabolic parameters showedany significant difference between BF and SK50 (l" Table 1), weassumed that running in diving socks can be used to simulatethe barefoot running pattern. Mechanical and metabolic datawere in agreement with the results previously reported in theliterature [8,9,17,31].The statistical comparison between the two ways of running(with shoes or socks) was also in agreement with previous re-search [8,17,26] except for the mean value of the passive peak(Fz1). In the present study, Fz1 was 8% lower in SK150 versusSH150 and 6% lower in SK350 versus SH350. Unfortunately, con-trary to the study of Divert et al. [17], these differences were notstatistically significant since nine of the twelve subjects showedno passive peak when running in diving socks, which made theanalysis impossible. In the present study, the necessary protec-tion of the runners from repeated shock led to an absence of thepassive impact by switching from rear foot to fore foot groundimpact technique [13] (l" Fig. 2A). This technique alteration wasdifferent from the simple passive impact reduction previouslyreported by Divert et al. [17] during barefoot running.
Table 1 Mechanical and metabolic parameters (mean ± SD) obtained during the six running conditions
Variable BF SK50 SK150 SK350 SH150 SH350 E
CT (%SDur) 33.2 ± 2.5 33.1 ± 2.2 32.9 ± 2.6 32.5 ± 2.7 33.9 ± 2.5A 34.4 ± 2.7B, c S (< 0.0001),S ×M (< 0.05)
Sf (Hz) 1.46 ± 0.08 1.44 ± 0.08 1.43 ± 0.08 1.41 ± 0.08 1.41 ± 0.07a 1.40 ± 0.07b, c S (< 0.01), M(< 0.05)
Fz1* (%BW) 149 ± 6 151 ± 8 155 ± 6 156 ± 8 168 ± 16 166 ± 6 –
Fzmax (%BW) 254 ± 24 255 ± 24 258 ± 26 261 ± 26 255 ± 25 259 ± 24 –
Iz (%BW • s) 34.5 ± 1.94 35.0 ± 1.94 35.3 ± 1.87 35.6 ± 2.10 35.6 ± 1.84 36.1 ± 1.75b, c S (< 0.05), M(< 0.05)
Iy1 (%BW • s) – 2.16 ± 0.21 – 2.18 ± 0.20 – 2.18 ± 0.19 – 2.25 ± 0.17 – 2.05 ± 0.17a 2.06 ± 0.20b S (< 0.0001)
Dz (cm) 5.5 ± 0.7 5.6 ± 0.7 5.7 ± 0.7 5.8 ± 0.7 5.8 ± 0.7a 6.3 ± 0.7B, c S (< 0.0001), M(< 0.05), S ×M(< 0.05)
Kleg (kN •m–1) 10.2 ± 1.4 10.0 ± 1.3 10.1 ± 1.4 10.1 ± 1.3 9.4 ± 1.5a 9.1 ± 1.8B, c S (< 0.0001), M(< 0.05), S ×M(< 0.05)
Kvert (kN •m–1) 29.6 ± 3.7 29.1 ± 3.5 29.1 ± 3.4 28.7 ± 3.3 28.5 ± 3.6 27.0 ± 3.8B, c S (< 0.01), M(< 0.01), S ×M(< 0.01)
Wtot (J •kg–1 • s–1) 7.13 ± 0.23 7.13 ± 0.20 7.12 ± 0.23 7.18 ± 0.11 6.93 ± 0.20A 6.96 ± 0.20B S (< 0.0001)
V̇O2
(mL •min–1 •kg–1)40.7 ± 2.9 40.4 ± 2.8 40.8 ± 2.5 41.6 ± 2.5 a 40.6 ± 3.1 42.1 ± 2.3c M (< 0.01)
hnet (%) 58.3 ± 5.3 58.7 ± 5.0 58.0 ± 4.7 57.0 ± 4.6 57.0 ± 5.6 54.5 ± 3.8b S (< 0.01)
When significance was found, the shoe (S; p < 0.05), the mass (M; p < 0.05) or the shoe ×mass (S ×M; p < 0.05) effect on parameters was underlined in column E. a/A: significantly
different (p < 0.05/p < 0.0001) from SK150; b/B: significantly different (p < 0.05/p < 0.0001) from SK350; c: significantly different (p < 0.05) from SH150. *: only 3 subjects displayed a
“passive peak” for “barefoot conditions”, i.e., BF, SK50, SK150 and SK350. With BF (barefoot), SK50 (diving socks), SK150 (light loaded diving socks, 150 g), SK350 (diving socks heavy
loaded, 350 g), SH150 (“light” shoes, 150 g) and SH350 (“normal” shoes, 350 g). With CT (contact time), SDur (stride duration), Sf (stride frequency), Fz1 and Fzmax (passive and
active peaks), Iz and Iy1 (vertical and anterior-posterior braking impulses), Dz (peak downward displacement), Kleg and Kvert (leg and vertical stiffness), Wtot (total work), V̇O2
(oxygen consumption) and hnet (net efficiency)
516
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics

Considering the changes in V̇O2, no shoe effect was reported,whereas V̇O2 was influenced by themass (l" Table 1). This meansthat the higher metabolic cost reported in shoe running [8] wasonly due to the extra mass induced by the shoe itself as sug-gested previously [8], and not due to other mechanical proper-ties of the shoe [26]. We observed a lower vertical stiffness,which implies a higher vertical displacement since Fzmax re-mains stable across groups when adding load to the feet in shodconditions (l" Table 1). Martin [26] had previously reported thisresult when adding 1 kg extra mass to the feet. Moreover, thesame author [26] reported that stride frequency was reducedby adding load. This result, which we also observed in thepresent study, has been reported several times by researchersaccording to Martin [26], even if one might expect the oppositeto occur. Indeed a heavier load on the foot would be more diffi-cult to swing forward due to the greater inertial load and thenthis might lead to a shorter step. However, it seems that runningloaded brakes the leg movement as underlined by the highercontact time reported in this running condition.Concerning muscular efficiency (hnet), which has metabolic andmechanical components, because Wtot was significantly lowerin shoe running than in simulated barefoot, while V̇O2 was notaffected, the net efficiency was lower in shoe running than inthe barefoot simulated condition. To the best of our knowledge,this result has never been reported in the literature. In addition,regarding the statistical analyses (l" Table 1), the hnet was exclu-sively affected by the shoe (p < 0.01) and not by the mass. Thismeans that runners could be less efficient if they run wearingshoes than if they run barefoot. However, it could be surprisingto conclude that, whereas mechanical work is significantly high-er in the barefoot condition, efficiency is greater. Nevertheless,the results of the present study showed that for nearly the sameoxygen consumption, barefoot runners produce more mechani-cal work. It is interesting to observe that during shod running,the changes in work and efficiency might offset each other toproduce no change in V̇O2, when compared to running barefoot.Barefoot running is thus reported to be a more efficient locomo-tion regarding hnet than shoe running. One reason for this wasreported in Divert et al. [17], namely an enhancement of the elas-tic energy storage-restitution in barefoot running. Regarding de-tailed analysis of mechanical work and impulses, we noticedthat Iy1 was significantly higher in barefoot than in shoe run-ning. Those modifications could lead to a rise in elastic energystorage during barefoot running and could be an explanation ofthe greater efficiency found in barefoot running in the presentstudy and already reported in the literature [6,7].Moreover, considering the statistical results of Kleg (l" Table 1),the higher Kleg reported in diving socks compared to shoe run-ning could also explain the greater efficiency in barefoot run-ning. Indeed, according to Dalleau et al. [14], there is a negativecorrelation between musculotendinous stiffness and the ener-getic cost of running. Then Kleg could also be amechanical factorinfluenced by the shoe that would explain running energeticcost variations. However, we did not find any relationship be-tween V̇O2 and Kleg parameters in the present study. This couldbe explained by the small range of values we found (7–13 kN •
m–1) compared to those from the latter study (12–28 kN •m–1).This study has confirmed that the mass due to the shoe influen-ces the energetics of running as firstly hypothesised. However, itshould not be concealed that the mass might also influencesome mechanical parameters, for example CT, Sf, Iz and Kvert.Furthermore, the present investigation has shown that wearing
a shoe influences the mechanics during running which is consis-tent with the second hypothesis. Nonetheless, this alteration inthe mechanical parameters seems to lead to modifications inthe net efficiency rather than in V̇O2 as we previously hypothes-ised in the introduction.Moreover, it was not surprising to observe that Kleg was signifi-cantly higher in diving socks loaded than shod, as this is prob-ably due to the fact that the stiffness of the shoe, which is me-chanically mounted in series with the musculotendinous stiff-ness, will reduce the total leg stiffness (shoe + muscle and ten-don), assuming that musculotendinous stiffness is maintainedconstant. The main role of the shoe is, indeed, to attenuate thefoot-ground impact by adding damping material [30].Considering Kvert, which indicates the runners’ vertical motion,we observed that Kvert was significantly lower in SH350 com-pared to SK350 and SH150. It is generally reported in the literaturethat the vertical stiffness remains constant whatever the surfacestiffness thanks to a leg stiffness adjustment [19]. However, themodifications of Kvert and Kleg parameters observed in the div-ing socks condition showed that the adjustment of leg stiffnessto surfaces is different from that to shoes [19]. As the runningpattern in barefoot is considerably altered compared to shod[17], it might be argued that leg stiffness adjustments usuallyobserved [19] could not be sufficient to maintain the constantvertical motion regarding vertical stiffness and vertical displace-ment (l" Table 1).Moreover, the ANOVA results for the mechanical and metabolicvariables, in which mass and shoe effects were also evaluated,indicated that significant shoe ×mass interactions were presentfor CT, Kleg and Kvert (l" Table 1). However, it is worth noticingthat the post hoc test results have shown that alterations due tothemass effect, observed for the four mechanical variables, wereonly observed when the mass was carried on the shoe. The masseffect will be more important for shod than for barefoot running.We could then suggest that the possible adjustment of runners’style following modifications of the inertial characteristics (tokeep the most economical technique) [35] could be easier whenrunning barefoot than shod.To summarise, although the oxygen consumptionwas mostly in-fluenced by the mass of the shoe, hnet was influenced exclusivelyby the shoe. On the one hand, we can assume that modificationsin the metabolic cost between barefoot and shoe running aresimply the result of the addedmass due to the shoe. On the otherhand, the lower net efficiency reported when running shodcould only be due to the wearing of shoes which induced me-chanical alterations. Further experiments should be done to bet-ter explore these effects at higher speed running closer to com-petition running speeds.
Affiliations1 LAMIH, Université de Valenciennes, Valenciennes, France2 Equipe PPEH, Département STAPS, Université de Saint-Etienne,Saint-Etienne, France
3 Institut für Sport und Sportwissenschaft, Universität Freiburg, Freiburg,Germany
4 Centre de recherche, Decathlon, Villeneuve d’Ascq, France5 Institut für Sportmedizin und Prävention, Universität Potsdam, Potsdam,Germany
517
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics

References1 Avogadro P, Chaux C, Bourdin M, Dalleau G, Belli A. The use of treadmill
ergometers for extensive calculation of external work and leg stiffnessduring running. Eur J Appl Physiol 2004; 92: 182–185
2 Bates BT, Osternig LR, Mason BR, James SL. Functional variability of thelower extremity during the support phase of running. Med Sci Sports1979; 11: 328–331
3 Belli A, Bui P, Berger A, Geyssant A, Lacour JR. A treadmill ergometer forthree-dimensional ground reaction forces measurement during walk-ing. J Biomech 2001; 34: 105–112
4 Belli A, Lacour JR, Komi PV, Candau R, Denis C.Mechanical step variabil-ity during treadmill running. Eur J Appl Physiol 1995; 70: 510–517
5 Blickhan R. The spring-mass model for running and hopping. J Bio-mech 1989; 22: 1217–1227
6 Bosco C, Rusko H. The effect of prolonged skeletal muscle stretch-shortening cycle on recoil of elastic energy and on energy expenditure.Acta Physiol Scand 1983; 119: 219–224
7 Bosco C, Tihanyi J, Komi PV, Fekete G, Apor P. Store and recoil of elasticenergy in slow and fast types of human skeletal muscles. Acta PhysiolScand 1982; 116: 343–349
8 Burkett LN, Kohrt WM, Buchbinder R. Effects of shoes and foot orthoticson VO2 and selected frontal plane knee kinematics. Med Sci Sports Ex-erc 1985; 17: 158–163
9 Catlin MJ, Dressendorfer RH. Effect of shoe weight on the energy cost ofrunning. Med Sci Sports Exerc 1979; 11: 80
10 Cavagna GA. Force platforms as ergometers. J Appl Physiol 1975; 39:174–179
11 Cavagna GA, Franzetti P, Heglund NC, Willems P. The determinants ofthe step frequency in running, trotting and hopping in man and othervertebrates. J Physiol 1988; 399: 81–92
12 Cavagna GA, Sabeine FP, Margaria R. Mechanical work in running. JAppl Physiol 1964; 19: 249–256
13 Cavanagh PR, Lafortune MA. Ground reaction forces in distance run-ning. J Biomech 1980; 13: 397–406
14 Dalleau G, Belli A, BourdinM, Lacour JR. The spring-massmodel and theenergy cost of treadmill running. Eur J Appl Physiol 1998; 77: 257–263
15 De Wit B, De Clercq D, Aerts P. Biomechanical analysis of the stancephase during barefoot and shod running. J Biomech 2000; 33: 269–278
16 Divert C, Baur H, Mornieux G, Mayer F, Belli A. Stiffness adaptations inshod running. J Appl Biomech 2005; 21: 311–321
17 Divert C, Mornieux G, Baur H, Mayer F, Belli A. Mechanical comparisonof barefoot and shod running. Int J Sports Med 2005; 26: 593–598
18 Farley CT, Gonzalez O. Leg stiffness and stride frequency in human run-ning. J Biomech 1996; 29: 181–186
19 Ferris DP, Liang K, Farley CT. Runners adjust leg stiffness for their firststep on a new running surface. J Biomech 1999; 32: 787–794
20 Frederick EC. Physiological and ergonomics factors in running shoe de-sign. Appl Ergon 1984; 15: 281–287
21 Frederick EC, Daniels JT, Hayes JW. The effect of shoe weight on theaerobic demands of running. Proceedings of the XXII World Congresson Sports Medicine, 1982. Vienna, 1984
22 Frederick EC, Howley ET, Powers SK. Lower O2 cost while running in aircushion type shoe. Med Sci Sports Exerc 1980; 12: 81–82
23 Hayes J, Smith L, Santopietro F . The effects of orthotics on the aerobicdemands of running. Med Sci Sports Exerc 1983; 15: 169
24 Kram R, Griffin TM, Donelan JM, Chang YH. Force treadmill for measur-ing vertical and horizontal ground reaction forces. J Appl Physiol 1998;85: 764–769
25 Kram R, Powell AJ. A treadmill-mounted force platform. J Appl Physiol1989; 67: 1692–1698
26 Martin PE.Mechanical and physiological responses to lower extremityloading during running. Med Sci Sports Exerc 1985; 17: 427–433
27 McMahon TA, Cheng GC. The mechanics of running: how does stiffnesscouple with speed? J Biomech 1990; 23 (Suppl 1): 65–78
28 Medbo JI, Mohn AC, Tabata I, Bahr R, Vaage O, Sejersted OM. Anaerobiccapacity determined by maximal accumulated O2 deficit. J Appl Phys-iol 1988; 64: 50–60
29 Minetti AE. Amodel equation for the prediction of mechanical internalwork of terrestrial locomotion. J Biomech 1998; 31: 463–468
30 Nigg BM. Biomechanics of Running Shoes. Champaign, IL: HumanKinetics Publishers, 1986: 139–165
31 Nilsson J, Thorstensson A. Ground reaction forces at different speeds ofhumanwalking and running. Acta Physiol Scand 1989; 136: 217–227
32 Schieb DA. Kinematic accommodation of novice treadmill runners. ResQ Exerc Sport 1986; 57: 1–7
33 Shorten MR. The myth of running cushioning. The IV InternationalConference on the Engineering of Sport. Kyoto, Japan, 2002: 1–6
34 Shorten MR,Winslow DS. Spectral analysis of impact shock during run-ning. Int J Sports Biomech 1992; 8: 288–304
35 Stegemann J. Exercise Physiology: Physiological Bases of Work andSport. Chicago: Year Book Medical Publishers, 1981: 258–264
518
Divert C et al. Barefoot-Shod Running Differences:… Int J Sports Med 2008; 29: 512–518
Orthopedics & Biomechanics





















![9LVXDOL]DomR GLVSRQLELOL]DGD SHOD &HQWUDO …](https://img.pdfslide.net/doc/110x75/6197154c331b1f2f541b9b8c/9lvxdoldomr-glvsrqleloldgd-shod-amphqwudo-.jpg)