Embed Size (px)
Citation preview

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 1/14

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 2/14
The effective path lengths are
Where the transit times and are
For light waves travelling in the clockwise and counter clockwise directions, respectively. The
free-space speed of light is denoted by C, and R is the radius of the ring. The transit time
difference t between the counter propagation waves, in the case of n loops that enclose an area,
(or Sagnac area — SA), can be expressed as
t = -
=
The assumption is made that >>
. The resultant optical path length Difference , L, is
C*∆t
L =
In the case of the analog or Interferometric fiber optic gyroscope (IFOG), the Sagnac phase shift
caused by a rotation can be expressed in terms of L as
L
Where is the wavelength of the free-space optical energy. Multiple wraps of fiber can be
wound to significantly increase L, thus improving the sensitivity. However, the optical
attenuation tends to limit the length of fiber to several kilometres.
In the case of the digital or resonant fiber optic gyroscope (RFOG), the energy in the
counter propagating beams is coupled into the fiber loop at two different frequencies in the
presence of a rotation. The relative frequency difference ƒ between the counter propagating
waves can be written in terms L of as

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 3/14
where ƒ = c/ and L = 2 RN is the total distance traversed. The fundamental RFOG equation that
relates ƒ to Ω is given by
Basic Configuration of FOG:
A basic FOG configuration is shown in figure. Light from a broadband source, such as a
super luminescent diode (SLD), is projected into a 3-dB fiber optic coupler that splits the light
into two waves. After traversing the coupler, the two light waves propagate equally in opposite
directions around the fiber optic coil. The light waves interfere upon return to coupler and project
a fringe pattern onto a photodetector.
Figure 2:Basic FOG configuration
In accordance with any two-wave interferometer, the intensity on the photo detector,
which represents a mixture of the two light waves, varies as cosine of Sagnac phase with its
maximum value at zero as shown in Figure This intensity is expressed as
where Io is the mean value of the intensity. The detected intensity is used to calculate the rotation
rate. In the case of no rotation, = 0, the light waves will combine in phase, which results in
maximum intensity.

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 4/14
Figure 3:Optical intensity versus phase difference between interfering waves
In the presence of a rotation, the light waves travel different path lengths and mix slightlyout of phase. The intensity is reduced due to the degree of destructive interference. The cosine
function, which is symmetrical about zero, has its minimum slope there. For small rotation rates,
it is impossible to determine the direction of rotation (CW or CCW) from the symmetrical aspect
of above figure, where the slope is near zero. Furthermore, the gyroscope operating in this mode
has minimum sensitivity near zero. Incorporating a dithering phase modulator with drive
modulation capability a symmetrically in the loop (near one end of the coil) provides a means to
introduce a nonreciprocal phase shift to bias the gyroscope to its maximum sensitivity point. This
corrective measure solves both the low-sensitivity problem and the issue of ambiguous direction
of rotation at low rotation rates.
Figure 4:Fiber optic gyroscope

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 5/14
When a phase modulator is used, the expression for the intensity on the photo detector is
where S is the Sagnac phase shift .
Where =wavelength of the source.
c=velocity of light.
L=length of the fiber coil.
D=diameter of the fiber coil.
Ω=rotation rate.
Why phase modulation?
A major problem of the basic configurations presented in Figure1 is the output
nonlinearity for small S = 0, which hinders high sensitivity measurements of small rotation
angles without sign ambiguity. This limitation is overcome by transforming the baseband cosine-
dependence into a sinusoidal function, for example, by translating the output signal from
baseband to a carrier at angular frequency w. Although different solutions have been proposed
and demonstrated, the optical phase modulation technique is nowadays commonly used. A phase
modulator is inserted in the fiber coil, close to a coupler output, so that a different phase delay is
cumulated by the counterpropagating waves.
The open loop configuration with phase modulation:
The all-fiberversion phase modulator is constructed by winding and cementing a few fiber turns
on a short, hollow piezoceramic tube (PZT). By applying to the PZT a modulating voltage, a
radial elastic stress and a consequent optical pathlength variation due to the elasto-optic effect
are generated.

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 6/14
Figure 5: All-fiber gyroscope with phase modulator.
As a result, the CCW and the CW propagating waves experience a phase delay Φ(t) and Φ(t +
τ), espectively, where τ=L/v is the radiation transit time in the fiber of overall length L.
The relative phase difference on the detector is then
ΦCCW - Φ CW = S + Φ(t) - Φ(t + τ)
which can also be written as
ΦCCW - Φ CW = S + Φ(t - τ/2) - Φ(t + τ/2)
Applying a phase modulation at angular frequency ωm
Φ(t) = Φmo cos ωmt
yields
ΦCCW - Φ CW = S + 2Φmosinωmτ/2 sinωmt = s + Φmsinωmt
where the amplitude Φm=2Φmo sinωmτ/2 can be maximized by selecting a PZT modulation
frequency fm=ωm /2=1/(2τ).
The photodetected signal I1
I1=I01[1+cos(ΦCCW - ΦCW)]
is thus given by (using the Bessel's functions J)

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 7/14
The photodetected signal contains, in addition to a DC components, all the harmonics of
the modulating signal. The amplitude of the even harmonic components depends on cosS, as in
the basic scheme, while the odd components carry the desired sinS dependence.
Closed loop schemes with analog or digital phase ramp:
In the open loop configuration, the lock-in output signal V is given by V=V0sinS and
V0 is the fringe amplitude. A first problem of this signal is the intrinsic nonlinearity and limited
dynamic range of the sinusoidal function, which may represent a restriction in some applications.
A second issue is related to the insufficient accuracy and stability of either the fringe amplitude
and the scale factor which multiplies the rotation rate. The presence of only the analog output is
also considered a third drawback of this configuration. A closed-loop scheme has been proposed
with different implementations for solving most of the above mentioned problems. The basic
idea consists in using a feedback effect which cancel the Sagnac phase shift by adding a
controlled phase delay, thus directly proportional to the rotation rate to be detected. This solution
however was not the most appropriate in terms of maintaining reciprocity. Alternatively, the
frequency variation is simulated by a phase ramp modulation, which has to be superimposed and
synchronized to the biasing phase modulation. The analog solution, based on an analog phase
ramp (also indicated as serrodyne modulation) in addition to the sinusoidal biasing modulation,
does not represent a very efficient solution. A great improvement is obtained with the all-digital
approach based on a square wave biasing modulation and on a digital phase ramp for closed-loop
processing.
The functional block diagram of this configuration is illustrated in Figure .
Figure 6:Block diagram of closed-loop FOG

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 8/14
Essentially, a digital feedback loop is added to the open-loop structure previously
reported in Figure. The lock-in amplifier output is sampled and quantized yielding the error
signal, which is maintained closed to zero by the digital feedback. The sampling frequency
corresponds to the inverse of the radiation transit time τ, for the required synchronisation of the
ramp and the biasing signal. Starting from the error signal, the controller drives the phase
modulator so that it generates phase steps of amplitude equal to the Sagnac phase shift and
duration τ. The digital to analog converter automatically creates the ramp reset, by means of its
overflow. The reset step corresponds to a phase variation of 2 radian, in order to get always the
correct Sagnac phase shift. In this scheme the rotation rate is directly obtained, in a digital
format, from the error signal. Another advantage of this configuration, with respect to the analog
solution, is the phase stability during the signal recovering.
Figure 7:Functional block diagram of the closed loop configuration with digital ramp .
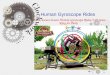
Applications of Fiber Optic Gyroscopes:
The fiber optic gyroscope has reached a level of practical use in navigation, guidance,
control, and stabilization of aircraft, missiles, automobiles, and spacecraft as shown in Figure 7.
The FOG performance and design requirements (such as resolution, stable scale factor,
maximum rate, frequency response, size, interface electronics, environment, etc.) have been
scaled to fulfil a broad range of applications such as route surveying and mapping, well logging,

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 9/14
self-guided service robots and factory floor robots, autonomous guided ground and air vehicles,
tactical missiles, guided munitions, cannon-launched vehicles, smart bombs, and seeker, missile
airframe and satellite antenna stabilization. The open-loop FOG is best suited for low-cost
applications such as gyro compassing, attitude stabilization, and pitch and roll indicators, which
require low- to moderate-performance accuracy. A number of corporations have developed low-
performance FOGs for use in automotive applications.
Program for detector current:
clc
clear all
close all
l=500;
d=30e-3;omega=(-165)*(180/pi);
phim=pi/2;
lambda=1550*(10^(-9));
c=3*(10^8);
fs=21e6;
fm=200*(10^(3));
const=((2*pi*l*d)/(lambda*c));
n=0:1/fs:0.0001;
phis=(const*omega);
phit=phim*sin(2*pi*fm*(n));
Id=(1+ cos(phis+phit));
figure(1)subplot(2,1,1);
plot(n,phit);
grid on
subplot(2,1,2);
plot(n,Id);
title('Id');
xlabel('n');
ylabel('Id');
grid on
y1=fft(phit);
m1=abs(y1);z1=length(y1)
f1=((0:z1-1)*fs)/z1;
figure(2)
subplot(2,1,1);
plot(f1,m1);
title('fft(i/p)');
xlabel('frequency');
ylabel('magnitude');

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 10/14
%magnitude plot
y2=fft(Id);
m2=abs(y2);
z2=length(y2)
f2=(0:z2-1)*(fs)/z2;
subplot(2,1,2);
plot(f2,m2);
title('fft(Id)');
xlabel('frequency');
ylabel('magnitude');
% phase plot
p1=unwrap(angle(y1));
figure(3);
subplot(2,1,1);
plot(f1,p1*180/pi);
p2=unwrap(angle(y2));
subplot(2,1,2);
plot(f2,p2*180/pi);title('phase');
Input sine wave and output detector current:

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 11/14
Fourier transform of input and output(magnitude response):

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 12/14
Phase response :
With rotation :
clcclear all
close all
l=500;
r=40e-3;
rot=-400:400;
lambda=1550e-9;
c=3*(10^8);
a=((4*pi*l*r)/(lambda*c));
rot1=deg2rad(rot);
b=(a*rot1);
plot(rot,b);
grid on
figure(2)
plot(rot,sin(b));
grid on

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 13/14
Rotation vs sagnac phase shift:

8/10/2019 Basics of Gyroscope
http://slidepdf.com/reader/full/basics-of-gyroscope 14/14
Sine wave representation: