Embed Size (px)
Citation preview

The Canadian Journal of Statistics 5Vol. 36, No. 1, 2008, Pages 5–28La revue canadienne de statistique
Bayesian analysis of mark-recapture data withtravel time-dependent survival probabilitiesSaman MUTHUKUMARANA, Carl J. SCHWARZ and Tim B. SWARTZ
Key words and phrases: Bayesian analysis; latent variable; mark-recapture; salmon; WINBUGS.
MSC 2000: Primary 62P10; secondary 62F15.
Abstract: The authors extend the classical Cormack–Jolly–Seber mark-recapture model to account for bothtemporal and spatial movement through a series of markers (e.g., dams). Survival rates are modeled as afunction of (possibly) unobserved travel times. Because of the complex nature of the likelihood, they usea Bayesian approach based on the complete data likelihood, and integrate the posterior through Markovchain Monte Carlo methods. They test the model through simulations and apply it also to actual salmondata arising from the Columbia river system. The methodology was developed for use by the Pacific OceanShelf Tracking (POST) project.
Analyse bayesienne de donnees de capture-recapture a l’aide deprobabilites de survie dependant du temps de deplacementResume : Les auteurs generalisent le modele de capture-recapture classique de Cormack–Jolly–Seber pourtenir compte de deplacements spatiaux-temporels signales par des marqueurs (tels que des barrages). Lestaux de survie sont modelises en fonction de temps de deplacement parfois inobservables. Vu la complexi-te de la vraisemblance, ils optent pour une approche bayesienne fondee sur la vraisemblance des donneescompletes et integrent la loi a posteriori par des methodes de Monte-Carlo a chaıne de Markov. Ils testentle modele par simulation et l’utilisent pour l’analyse de donnees sur les saumons du reseau hydrographiquede la Columbia. La methodologie a ete developpee aux fins du projet POST (Pacific Ocean Shelf Tracking).
1. INTRODUCTIONThe Pacific Ocean Shelf Tracking (POST) project (http://www.postcoml.org) is part of the Censusof Marine Life study (http://www.coml.org). In the POST project, acoustic transmitters are surgi-cally implanted into fish (e.g., salmon smolt). The fish are then tracked during their migrationby a series of listening lines along the ocean shelf. These listening lines record the acoustic-identification of the fish that pass near the receivers and their times of passage. A complicatingfactor in the analysis of the POST data is that sometimes fish do not pass sufficiently close to thereceiver, and hence are not detected. Data are downloaded from the listening lines and are storedin a database that can be queried by researchers.
The POST project is a combination of two types of mark-recapture experiments. In the firsttype of mark-recapture experiment (Lebreton, Burnham, Clobert & Anderson 1992), animalsare initially marked, and then a subset of these animals are recaptured at yearly intervals (forexample). In this type of experiment, the interest is in the temporal dimension of survival. Forexample, one may be interested in the survival rates of a species from year to year. In the POSTproject, we are also interested in the temporal dimension of survival and this information iscaptured by measuring the passage of time between listening lines.
In the second type of mark-recapture experiment, marked fish are released, and are detectedas they swim past landmarks (Burnham et al. 1987, p. 25). In this type of experiment, the interestis in the spatial dimension of survival. For example, one may be interested in survival ratesbetween particular dams. In the POST project, the listening lines are placed in fixed locationswhich may correspond to interest in the spatial dimension of survival.
This paper considers methods of combining both the temporal and the spatial dimensions ofthe problem into a single mark-recapture model. We provide a generalization of the Cormack–

6 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
Jolly–Seber model (Cormack 1964; Jolly 1965; Seber 1965). Their model assumes that survivalprobabilities between listening lines are homogeneous amongst all animals. In our generaliza-tion, the travel times of individual animals between listening lines differ amongst animals andsurvival may be a function of travel time. Cowen & Schwarz (2005) considered a similar prob-lem, but they assumed that survival rates between listening lines are independent of travel time.We do not make this restrictive assumption. We model survival probabilities as a function oftravel times. Pollock, Bunck, Winterstein & Chen (1995) considered Kaplan–Meier estimationin a context that allows for differential survival and the possibility of relocation of some animals.We allow for nondetection as in standard mark-recapture models.
A standard likelihood approach is difficult because of the presence of multidimensional inte-grals. A natural way to approach this problem is via a Bayesian framework through the use oflatent (unobservable) variables. A Bayesian approach via simulation avoids the maximization oflikelihoods which may be problematic in high-dimensional problems. Latent variables arise inthe experiment when marked fish go unobserved at listening lines. A complete data likelihoodis easy to construct as it treats the latent variables as though they are observable. We then “in-tegrate” over the complete data likelihood by obtaining a Markov chain Monte Carlo (MCMC)sample from the posterior. Brooks, Catchpole & Morgan (2000) provide a review of Bayesianmethods in mark-recapture experiments.
In Section 2, we provide a detailed development of the Bayesian model. The complete datalikelihood is derived where survival probabilities depend on travel times. When the distancesbetween listening lines vary greatly, the dependence structure is clearly important. Prior distrib-utions are then defined on the model parameters. Computation is discussed in Section 3. As theposterior distribution is complex and high-dimensional, we obtain posterior summary statisticswhich describe key features in the study. In particular, posterior expectations are approximatedthrough MCMC methods using WinBUGS software (Spiegelhalter, Thomas & Best 2003). Un-like the Cormack–Jolly–Seber model, it is shown that nonidentifiability is not a problem for theproposed Bayesian model. In Section 4, we discuss the topics of model selection and modeladequacy. In Section 5, we provide some examples and demonstrate the reliability of the ap-proach via simulation. We also provide sensitivity analyses with respect to some of the modelassumptions. We conclude with a short discussion in Section 6.
2. MODEL DEVELOPMENTConsider a population of n fish where each fish is implanted with an acoustic transmitter. Withoutloss of generality, assume that all fish are released at location j = 0, and that listening lines areset up at locations j = 1, . . . ,m. The observed data for the experiment consist of (!, T obs)where ! = {!ij} is the detection history such that
!ij =
!
1 if the ith fish is detected at location j,
0 if the ith fish is not detected at location j
and !i0 = 1. The vector T obs = {Tij} corresponds to observed cumulative travel times suchthat Tij is the time required for the ith fish to travel from the point of release to location j. Whena fish is not detected, then there is no observed cumulative travel time. We refer to the missingor latent cumulative travel times as Tmis and let T = (T obs, Tmis). Therefore T represents thecomplete cumulative travel times. Note that when a fish has died (and is therefore not detected),we still imagine that there is a cumulative travel time associated with the fish. The value ismissing but it represents the cumulative travel time that the fish would have taken had it beenalive.
Associated with (!, T ) are the quantities (Sobs, t) where Sobs = {Sij} is a function of thedetection history data ! and t = {tij} is a function of the complete cumulative travel times T .The variable Sij denotes the survival status of the ith fish at location j, where Sij = 1 (0) indi-cates that the ith fish is alive (dead) at location j. Since fish are released alive, we have Si0 = 1.

2008 MARK-RECAPTURE DATA 7
Note that whereas the entire vector ! is observed, some of the entries Sij are latent. This is due tothe fact that an undetected fish may be either alive or dead. As an example, consider the observeddata (!i0, . . . ,!i5) = (1, 0, 0, 1, 0, 0). In this case, (Si0, . . . , Si3) = (1, 1, 1, 1), but Si4 and Si5
are latent. We supplement the observed Sobs with the missing or latent Smis to give the completesurvival history S = (Sobs, Smis). The variable tij = Tij ! Ti,j!1 denotes the interval traveltime for the ith fish from location j ! 1 to j. Because some of the Tij may be missing, this im-plies that some of the tij may be missing. In fact, there are at least as many missing tij as thereare missing Tij . As an example, consider (Ti0, Ti1, Ti2, Ti3, Ti4, Ti5) = (0, x,NA,NA, y, z)where NA denotes “Not Available”. Then (ti0, ti1, ti2, ti3, ti4, ti5) = (0, x,NA,NA,NA, z!y).Therefore, the vector t consists of both observed and latent data. Missing data issues have beenpreviously considered in mark-recapture experiments. For example, Bonner & Schwarz (2006)showed how the classical Cormack–Jolly–Seber model can be extended for time-dependent in-dividual covariates which form a set of missing values when animals are unobserved. Dupuis(1995) used directed graphs for the Bayesian analysis of mark-recapture experiments of the firsttype (Lebreton, Burnham, Clobert & Anderson 1992).
We now describe the two primary parameters of interest in the model. We let pj denote theprobability of detection at the jth location. As the acoustic transmitters are identical and the fishcomprise a sample from an underlying population, one typically assumes that the probability pj
does not depend on fish i. In some instances, it may be reasonable to assume a common proba-bility of detection (i.e., pj = p for all locations) although the general case causes no additionaldifficulty. The second parameter of interest concerns survival, where "ij denotes the survivalprobability of the ith fish when travelling from location j!1 to location j given that the fish wasalive at location j!1. In Cowen & Schwarz (2005), the modelling assumption "ij = "j impliesthat survival probabilities are independent of travel times. In our paper, we consider "ij = f(tij)where f is a specified decreasing parametric function. Therefore, the longer that it takes a fishto travel between locations j ! 1 and j, the greater the chance that the fish does not survive. Inour datasets, travel times are measured in days, and we define "ij = q
tij
j such that qj denotesthe daily survival probability when travelling between locations j ! 1 and j. Our modellingassumption implies that survival is independent across days. Therefore, the proposed frameworkreduces the primary parameters of interest to (p, q) where p = {pj} and q = {qj}. Gimenezet al. (2006) consider a penalized spline approach when modelling survival probabilities in asemi-parametric fashion.
In Cowen & Schwarz (2005), an observed likelihood is obtained based on the observed data(!, T obs). The observed likelihood is complex as it involves integrals with respect to the latentcumulative travel times Tmis. We take an approach based on the complete data likelihood asin van Deusen (2002). The complete data likelihood treats latent variables as though they areavailable, and is especially well suited to Bayesian analyses (as will be seen). An advantage ofthe complete data likelihood over the observed likelihood is that it has a much simpler form. Inour approach, we develop the complete likelihood based on (!, S, t).
In obtaining the complete data likelihood, let [A |B] generically denote the density functionor probability mass function corresponding to A given B. In addition, let !i = (!i0, . . . ,!im),Si = (Si0, . . . , Sim), and Ti = (Ti0, . . . , Tim). Then the complete data likelihood is given by
[!, S, T ] ="n
i=1
#
!i, Si, Ti
$
"ni=1
#
!i |Si, Ti
$
[Si, Ti]"n
i=1
#
!i |Si, Ti
$
[Si |Ti][Ti](1)
where the independence of fish is assumed and the expressions in (1) are based on conditionalprobability. The complete data likelihood for the ith fish is therefore the product of three terms;

8 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
the conditional probability mass function of detection history given survival and travel time his-tory, the conditional probability mass function of survival history given travel time history andthe travel time density. We now derive expressions for each of the three terms in the product (1).The first term is given by
[!i |Si, Ti] = [!i |Si]
="m
j=1[!ij |Sij ]
="m
j=1(p!ij
j (1 ! pj)1!!ij )Sij(2)
where the key assumption in (2) is that detection at location j does not depend on other locations,and we note that when a fish dies (i.e., Sij = 0), then detection is impossible and there is nocontribution to the complete data likelihood. Now
[Si |Ti] = [Sim |Si0, . . . , Si,m!1, Ti][Si,m!1 |Si0, . . . , Si,m!2, Ti] · · · [Si1 |Si0, Ti]
= [Sim |Si,m!1, Ti][Si,m!1 |Si,m!2, Ti] · · · [Si1 |Si0, Ti]
="m
j=1[Sij |Si,j!1, Ti,j!1, Tij ]
="m
j=1("Sij
ij (1 ! "ij)1!Sij )Si,j!1
="m
j=1(qtijSij
j (1 ! qtij
j )1!Sij )Si,j!1
(3)
where tij = Tij ! Ti,j!1 and there is no survival contribution to the likelihood when a fish hasalready died (i.e., Si,j!1 = 0). Putting (1), (2) and (3) together, we have the complete datalikelihood
[!, S, T ] =n
%
i=1
[Ti]m%
j=1
(p!ij
j (1 ! pj)1!!ij )Sij (q
tijSij
j (1 ! qtij
j )1!Sij )Si,j!1 . (4)
The last step in the determination of the complete data likelihood (4) is the specificationof [Ti]. Note that it is preferable to model [Ti] rather than [ti] = [ti0, . . . , tim] since thereare at least as many missing tij as missing Tij and therefore we would lose information bymodelling [ti]. As the fish arise from the same population and travel times are nonnegative, itmay be reasonable to consider a multivariate lognormal distribution. The convenient covariancestructure in the multivariate normal distribution is appealing as one might imagine that a fish thatis fast (slow) in travelling between two locations may be fast (slow) in travelling between otherlocations. Specifically, we assume
&
log(Ti1), . . . , log(Tim)'"
" Normalm(µ,!), (5)
subject to the constraint 0 < Ti1 # · · · # Tim where a covariance structure is explicitly allowedbetween the log(Tij). A simpler (but perhaps less realistic) alternative to (5) is (Ti1, . . . , Tim) "Normalm(µ,!) subject to the same constraint 0 < Ti1 # · · · # Tim.
In a Bayesian analysis, prior distributions are required for the unknown parameters. Some-times, strong prior information may be available (e.g., a working knowledge concerning thedetection probabilities of listening lines) and it is useful to incorporate this knowledge as can bedone in a Bayesian framework. In this paper, we suggest default prior distributions which tend tobe diffuse. Diffuse distributions are appealing in that they allow the data to drive the inference.Referring to (4) and (5), we consider the prior density
[p, q, µ,!] = [p] [q] [µ] [!] (6)

2008 MARK-RECAPTURE DATA 9
where prior independence is assumed. As the p and q are probabilities defined on the simplex, itis customary to assume Beta priors. Specifically, we assume independent detection probabilitiespj , where
[pj ] $ pap!1j (1 ! pj)
bp!1
and independent daily survival probabilities qj where
[qj ] $ qaq!1j (1 ! qj)
bq!1.
The a and the b may be prespecified based on one’s subjective understanding of the listeningdevices and the daily survival rates. We impose a diffuse Normalm(0,#µI) prior for the meanlog travel time distribution [µ] where #µ is set large and the normal distribution is constrainedaccording to µ1 # · · · # µm. We set !!1 " Wishart((1/m)I,m). Having specified thecomplete data likelihood (see (4) and (5)) and the prior (6), the ingredients for a Bayesian analysishave been determined.
3. COMPUTATIONSWe re-express the complete data likelihood [!, S, t] in (4) as
#
Xobs, Xmis | p, q, µ,!$
to empha-size the dependency on the unknown parameters and to emphasize that (!, S, t) consists of bothobserved and missing values. The Bayesian paradigm then gives the following expression for theposterior
#
p, q, µ,! |Xobs$
$#
Xobs | p, q, µ,!$#
p, q, µ,!$
=( #
Xobs, Xmis | p, q, µ,!$#
p, q, µ,!$
dXmis.
(7)
In theory, the posterior density (7) provides a complete description of the uncertainty inthe parameters defined in the mark-recapture experiment. However, the dimensionality and thecomplexity of (7) is such that it is impossible to gain any meaningful insight. Alternatively, weconsider the following expression
#
p, q, µ,!, Xmis |Xobs$
$#
p, q, µ,!, Xobs, Xmis$
$#
Xobs, Xmis | p, q, µ,!$#
p, q, µ,!$
(8)
where the last expression in (8) is the product of the complete data likelihood and the priordensity which are familiar and simple forms.
Therefore, if we are able to sample variates (p, q, µ,!, Xmis) from (8), then we can use thesampled components (p, q, µ,!) as realizations from the posterior distribution. However, sam-pling directly from (8) is a difficult/impossible task, and instead, a Markov chain is constructedwhich has the posterior as its stationary distribution. Fortunately, this is easily implemented usingWinBUGS software (Spiegelhalter, Thomas & Best 2003). In WinBUGS, the user needs only tospecify the form of the complete data likelihood, the prior and the observed data. WinBUGS thenproduces an appropriate Markov chain. The user may then proceed with the Markov chain outputas seen fit. For example, output may be averaged to provide estimates of posterior expectationsand marginal posterior densities may be approximated using density estimation techniques. Wemay even obtain posterior expectations of latent variables. Note that whereas classical methods(e.g., estimation and testing) often rely on asymptotic distributions of statistics, a sample fromthe posterior is a sample from the distribution of interest. An overview of the use of MCMCmethods is provided in the edited text by Gilks, Richardson & Spiegelhalter (1996). Carlin &

10 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
Louis (2000) and Gelman, Carlin, Stern & Rubin (2003) provide further information on MCMCand give modern accounts of the Bayesian approach to statistics. A detailed description of theWinBUGS code for the POST project is given in Muthukumarana (2007). There are differentversions of WinBUGS and only the full version 1.4.1 was able to handle the complexity of ourmodel. When a model is not too complex, WinBUGS makes use of the Gibbs sampling algo-rithm to generate a Markov chain. With our model, the full conditional distributions required forGibbs sampling have nonstandard forms. In this case, WinBUGS makes use of the Metropolis–Hastings algorithm, where Markov chain output contains streams of duplicate values due to theacceptance/rejection step in the algorithm. We note that conditional on Sij and Si,j!1, there aretwo Bernoulli terms in the complete data likelihood. More specifically, we can express (4) as
[!, S, T ] =n
%
i=1
[Ti]m%
j=1
(Sijpj)!ij (1 ! Sijpj)
1!!ij (Si,j!1qtij
j )Sij (1 ! Si,j!1qtij
j )1!Sij .
The recognition of this fact enables a simpler expression for the complete data likelihood anddramatically reduces the computational time. We also note that our model contains constraineddistributions for the log(Tij) and the µj variables. As constraints are not a standard featureof WinBUGS, we overcame this difficulty through the use of indicator variables. Using thisapproach, it is not necessary to determine the norming constant for the constrained distribution.
WinBUGS coding can initially be difficult; we hope that our code provides a beginning tem-plate for future Bayesian analyses in mark-recapture. We also note that some preprocessing wasrequired for the data considered in Section 5.2. It was necessary to extract (!, S) from T obs
prior to running WinBUGS. An R code developed for the preprocessing stage is provided inMuthukumarana (2007).
3.1. Nonidentifiability.It is well known that final survival and capture rates are confounded in the classical Cormack–Jolly–Seber model as a result of nonidentifiability. To understand the problem at a deeper level,we recall that the observed likelihood in that model is not the same as the complete data like-lihood (4). The observed Cormack–Jolly–Seber likelihood differs in that it does not containthe cumulative travel-time distributions [Ti] appearing in (4). Secondly, the individual survivalprobabilities "ij = q
tij
j in (4) are replaced with the simpler probabilities "ij = "j . Finally,the observed likelihood (which is difficult to write down in the general case) may be derivedfrom the complete data likelihood (4) by summing over cases that are not directly observed.For example, the term in the complete data likelihood corresponding to the unobservable case(Sim = 1,!im = 0) is added to the term in the complete data likelihood corresponding to theobservable case (Sim = 0,!im = 0). As a result, the terms pm and "m only appear in theobserved data likelihood as the product pm"m. The implication is that the data only allow us tolearn about the product pm"m and not about the individual parameters pm and "m. In this case,we say that pm and "m are nonidentifiable.
In general, the typical consequences of nonidentifiability include ridges in the likelihood sur-face and multimodality which are problematic for estimation. In a Bayesian context, these sortsof problems may not be as problematic as in the classical context. In theory, all that one needsto do in a Bayesian analysis is integrate to obtain the required posterior summaries. However,from a practical perspective, nonidentifiablity still may cause problems in a Bayesian analysis.For example, MCMC algorithms may have difficulty traversing parameter spaces with elongatedlikelihoods.
Swartz, Haitovsky, Vexler & Yang (2004) have demonstrated that the use of informative (i.e.,nondiffuse) priors may be effective in mitigating the effects of nonidentifiability in Bayesianmodels. In our application, we recommend the use of informative priors particularly for thedetection probabilities pj . There is often good prior knowledge concerning the capabilities ofthe listening lines and the acoustic transmitters.

2008 MARK-RECAPTURE DATA 11
In view of the above discussion, there is an appealing by-product of the modelling assumption"ij = q
tij
j with respect to nonidentifiablity. In the Cormack–Jolly–Seber model, if one replaces"ij = "j with "ij = q
tij
j , the nonidentifiablity disappears because the product pmqtimm appearing
in the likelhood differs over the fish i = 1, . . . , n. This result is somewhat paradoxical as themodel with "ij = q
tij
j is more complex than the traditional Cormack–Jolly–Seber model with"ij = "j , yet we gain better insight regarding the individual parameters with the more complexmodel. In the model proposed in this paper (which is a generalization of the Cormack–Jolly–Seber model), it follows that there is no problem with nonidentifiability.
4. MODEL SELECTION AND MODEL ADEQUACYThe topics of model selection and model adequacy are of fundamental importance in appliedstatistics and these topics are becoming increasingly important with the consideration of morecomplex models. However, in Bayesian statistics, a myriad of approaches have been proposed forboth model selection and assessing model adequacy, and it is fair to say that there is no consensuson the “correct” approach to either of these problems. In this section, we provide some generalremarks on model selection and model adequacy, and we provide some concrete suggestions thatare relevant to the problem at hand.
4.1. Model selection.A principled Bayesian approach for comparing a finite number of competing models involvesthe calculation of the posterior probabilities of the models. When equal prior probabilities areassigned to each of the models, then the posterior comparison of two models (i and j) reduces toa study of the Bayes factor
Bij =
(
fi(x | $i)%i($i) d$i(
fj(x | $j)%j($j) d$j, (9)
where fi(x | $i) is the likelihood of model i with parameter $i, and %i($i) is the prior densitycorresponding to parameter $i. When the Bayes factor Bij is greater (smaller) than 1, this pro-vides evidence for (against) model i relative to model j. A major practical difficulty with the useof Bayes factors is the calculation of the Bayes factorBij . The expression (9) can rarely be eval-uated analytically and it is typical to attempt to approximate Bij . For example, a method thatis often unstable involves the approximation of the numerator by averaging fi(x | $(k)
i ) where$(k)
i is the kth iteration of $i from the prior distribution. Naturally this approach presupposesa proper prior. Methods of approximation based on output from MCMC simulation have alsobeen proposed. However, even these methods are fraught with difficulties. For example, we haveexperienced unstable estimation and overflow with the complex models proposed in this paper.Another serious problem with the use of Bayes factors is one of calibration when improper priorsare used. An overview of Bayes factors is given by Kass & Raftery (1995).
Due to the practical difficulties with the use of Bayes factors in complex models, a num-ber of alternative diagnostics have been proposed that are often viewed as approximations toBayes factors. For example, the diagnostics AIC (Akaike 1973), BIC (Schwarz 1978) and DIC(Spiegelhalter, Best, Carlin & van der Linde 2002) have all received prominent attention in theliterature.
Amongst the numerous model selection diagnostics, it appears that the DIC is the mostwidely used in WinBUGS applications. In fact, WinBUGS provides DIC values as an optionin its Inference menu. Unfortunately, DIC is unavailable in WinBUGS with our model due tothe complexity of the model where some of the stochastic nodes (e.g., survival status Sij) arediscrete.
One of the main thrusts of our paper is that complex mark-recapture models can be analyzedfairly easily using WinBUGS software. Therefore we believe that it would be against the spirit

12 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
of the paper to require the investigator to fit models using WinBUGS and then carry out modelselection using some sophisticated procedure outside of WinBUGS. For example, the method ofLaud & Ibrahim (1995) based on posterior predictive discrepancies requires variate generationfrom marginal distributions outside of WinBUGS. For this reason, we want a model selectionapproach that can be easily implemented within WinBUGS.
For model selection in our mark-recapture models, we suggest the use of the BIC diagnostic.The BIC diagnostic is a little more sophisticated than AIC as it takes sample size into account.Denote the complete data likelihood (4) by L($) where $ = (!, S, T ) and let $(i) represent theith realization of $ from MCMC simulation. Then the BIC is approximated by
BIC = p log(n#) !2
N
N)
i=1
log L($(i)), (10)
where p is the number of parameters in the model (including missing values), n# is the numberof observed data values, and N is the number of MCMC simulations. A model with a smallervalue of (10) is a preferred model. Note that p log(n#)may be viewed as a penalty term that takesthe dimensionality of the model into account. Note also that the Bayesian formulation of BICis different than the classical version which evaluates log L at the maximum likelihood estimaterather than averaging log L over the posterior. Again, an important feature is that (10) may beevaluated directly in WinBUGS by coding BIC. Some discussion of the use of BIC and othermodel selection diagnostics in Bayesian applications is given by Aitkin (1991) and DeSantis &Spezzaferri (1997).
4.2. Model adequacy.As problematic as model selection may be with complex Bayesian models, the assessment ofmodel adequacy in complex Bayesian models is even more problematic. A possible explanationfor this is that a posteriori testing of model adequacy is not a Bayesian construct and may beseen as violating the Bayesian paradigm. From the point of view of a subjective Bayesian purist,any uncertainty concerning a model ought to be expressed via prior opinion. For example, ifan experimenter is unsure whether the sampling distribution of the data is normal or Student,then the uncertainty might be expressed via a mixture. In theory, if we are able to expressuncertainty in a model (and this includes both the sampling model and the parameters given thesampling model), then there is no need to assess model adequacy, as all possible models havebeen considered and our inferences are subjective. However, from a practical point of view,it is typically difficult or impossible to determine the space of possible sampling models andparameters, and to assign prior opinion to the space.
Therefore, what does the practical Bayesian do in the context of model assessment? Anhonest answer may be that the assessment of complex Bayesian models is not a routine activ-ity. When Bayesian model assessment is considered, it appears that the prominent modern ap-proaches are based on the posterior predictive distribution (Gelman, Meng & Stern 1996). Theseapproaches rely on sampling future variates y from the posterior predictive density
f(y |x) =
*
f(y | $)%($ |x) d$, (11)
where x is the observed data, f(y | $) is the sampling density for y and %($ |x) is the posteriordensity. In MCMC simulation, approximate sampling from (11) proceeds by sampling yi fromf(y | $(i)), where $(i) is the ith realization of $ from the Markov chain. Model assessment theninvolves a comparison of the future values yi versus the observed x. One such comparisoninvolves the calculation of posterior predictive P -values (Meng 1994).
A major difficulty with posterior predictive methods concerns a double use of the data.Specifically, the observed data x is used both to fit the model giving rise to the posterior density%($ |x) and then is used in the comparison of yi versus x. For this reason, some authors prefer

2008 MARK-RECAPTURE DATA 13
a cross-validatory approach (Gelfand, Dey & Chang 1992) where the data x = (x1, x2) are splitso that x1 is used for fitting and x2 is used for validation.
We take the view that in assessing a Bayesian model, the entire model ought to be underconsideration, and the entire model consists of both the sampling model of the data and the prior.We also want a methodology that does not suffer from double use of the data. Finally, we want anapproach that is not too difficult to implement; as we have argued, our complex mark-recapturemodels are easily fit usingWinBUGS. For the models proposed here, we recommend an approachthat is similar to the posterior predictive methods but instead samples “model variates” y fromthe prior predictive density
f(y) =
*
f(y | $)%($) d$, (12)
where %($) is the prior density. This approach was advocated by Box (1980) before simulationmethods were common. Note that generating from (12) presupposes proper priors which arerequired in WinBUGS.
It is not difficult to write R code to simulate y1, . . . , yN from the prior predictive densityin (12). It is then a matter of deciding how to compare the yi against the observed data x.We advocate simple comparisons that are of direct interest to the application. For example,one might compare the mean observed cumulative travel time T 2 =
+ni=1 Ti2/n at the second
listening line to the histogram formed by the N variates T 2 obtained from the prior predictivesimulation. Naturally, as the priors become more diffuse, it becomes less likely to find evidenceof model inadequacy. We investigate the assessment of model adequacy on the Columbia riverdata in Section 5.2.
5. EXAMPLES
5.1. Simulated data.Various simulation studies were carried out. We report on one such simulation. A dataset corre-sponding to n = 500 fish withm = 5 listening lines was simulated using the R code. Detectionprobabilities at each listening line were set to pj = p = 0.8, while daily survival probabilities be-tween listening lines were set to qj = q = 0.99, j = 1, . . . ,m. The logarithms of the cumulativetravel times between the listening lines were generated from the constrained multivariate normaldistribution (5) with µ = (1, 2, 3, 4, 5)$ and ! =( #ij) where #ii = 1.0 and #ij = 0.8 for i %= j.We then generated a survival history S based on Sij " Bernoulli (q
tij
j ) and a detection history! based on !ij |Sij = 1 " Bernoulli (pj). Having generated the data as described, we parti-tioned the data into the observed and missing components of (!, S, T ); this is necessary for theconstruction of the complete data likelihood (4). In the simulated data, there are 5(500) = 2500cumulative travel times Tij of which 858 are missing. Therefore we have considered a chal-lenging test case with a large proportion of missing values. At the fifth listening line, a typicalsurvival probability is "i5 = qTi5!Ti4
5 = (0.99)exp(5)!exp(4) & 0.39.For the analysis of the simulated dataset, we first consider the “full model” which contains all
of the parameters described in the paper. Uniform prior distributions for the parameters pj andqj were assigned according to pj " Beta (1.0, 1.0) and qj " Beta (1.0, 1.0), j = 1, . . . , 5 withindependence across the distributions. The specified priors provide a good test of the robustnessof the methods with respect to the priors as the corresponding prior means E (p) = E (q) = 1/2are not close to the preset parameter values. The cumulative travel times are modelled as in (5)and the rest of the prior settings are given as described in Section 2. The model was fit usingWin-BUGS software where 500 iterations were used for the burn-in period. The posterior estimates inTable 1 were based on 8000 iterations which required approximately 15 minutes of computationon a personal computer. We observe that the posterior means of the primary parameters pj andqj are close to the preset values. The posterior means of the secondary parameters µ and ! alsoappear in agreement with the preset values.

14 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
TABLE 1: Estimates of posterior means and posterior standard deviations in Example 5.1.
Parameter Mean SD Parameter Mean SD
p1 0.77 0.02 !11 0.91 0.06p2 0.79 0.02 !12 0.79 0.05p3 0.81 0.02 !13 0.77 0.05p4 0.82 0.02 !14 0.77 0.05p5 0.76 0.02 !15 0.77 0.06q1 0.99 0.00 !22 1.01 0.06q2 0.99 0.00 !23 0.84 0.06q3 0.99 0.00 !24 0.80 0.06q4 0.99 0.00 !25 0.85 0.06q5 0.99 0.00 !33 0.94 0.06µ1 1.02 0.04 !34 0.82 0.06µ2 2.06 0.04 !35 0.81 0.06µ3 3.06 0.04 !44 0.95 0.06µ4 4.02 0.04 !45 0.83 0.06µ5 5.02 0.04 !55 0.99 0.07
We now wish to investigate aspects of the model selection diagnostic BIC in (10). Withsimulated data, we can investigate the diagnostic since we know the true model from which thedata were generated. For the full model considered above with the uniform priors, we obtainedBIC = 9640.3. Knowing the way that the data were simulated, we also fit the “true model” with"ij = qtij and pij = p where independent uniform priors were assigned to p and q. For the truemodel, we obtained BIC = 9557.5. Therefore the BIC diagnostic preferred the true model overthe full model.
We next fit an even simpler model with "ij = "j and pj which is analogous to the Cowenand Schwarz (2005) model as it does not consider survival as a function of travel time. Inthis case, BIC = 9725.2. Therefore the BIC diagnostic rightly suggests that the travel timeassumption is important. In fact, the full model is preferred to the model analogous to Cowenand Schwarz (2005).
Finally, we consider the sensitivity of the analysis with respect to the travel time assump-tion (5). The analysis here is the same as in the full model analysis except that we assumethe simpler travel time distribution (Ti1, . . . , Tim) " Normalm(µ,!) subject to the constraint0 < Ti1 # · · · # Tim. Under the simpler assumption, the posterior means of the pj and qj arecomparable to the posterior means in the analysis of the full model and BIC = 9763.3. Thissuggests that even though the overall fit of the simpler model is not good (in terms of the BIC),the precise shape of the distribution of the cumulative travel times is not a critical assumption inthe estimation of the primary parameters of interest.
5.2. Columbia river data.The model was then fit to data obtained from the Columbia River system. From April 25, 2001 toMay 30, 2001, n = 324 radio-tagged chinook salmon were released from the Rock Island Dam.Data were recorded at listening lines established at the m = 3 dams downstream at Wanapum,Priest Rapids, and Hanford Reach. For example, corresponding to fish j = 4, we have data values!4 = (1, 1, 0, 0) and (T40, T41, T42, T43) = (0, 6.1,NA,NA). This implies that the fourth fishwas released at the Rock Island Dam and then detected at Wanapum but was undetected at bothPriest Rapids and Hanford Reach. The fish took 6.1 days to reach Wanapum from the RockIsland Dam. The data gives rise to the survival history S4 = (1, 1,NA,NA) since we know

2008 MARK-RECAPTURE DATA 15
that the fish survived up to Wanupum, but it is unknown whether the fish survived up to PriestRapids or Hanford Reach. The interdam distances are approximately 37.6 miles, 18.7 miles,and 15.0 miles, respectively. In the Columbia river data, there are 3(324) = 972 cumulativetravel times Tij of which 294 are missing. Cowen & Schwarz (2005) also studied this datasetin the context of radio failure. Here, we ignore radio failure, and therefore survival is a functionof both actual survival and radio failure. In this example, we fit a model which allows for thepossibility of varying detection probabilities pj and varying daily survival probabilities qj at eachof the dams. Uniform priors were assigned to the detection and daily survival probabilities. Theremaining priors are given as in Section 2. We remark that it is possible to enhance the model bystratifying the salmon according to their release date, although we have not done so.
TABLE 2: Estimates of posterior means and posterior standard deviations in Example 5.2.
Parameter Mean SD
p1 0.96 0.03p2 0.97 0.03p3 0.98 0.02q1 0.99 0.00q2 0.91 0.01q3 0.77 0.02µ1 2.23 0.03µ2 2.60 0.03µ3 2.78 0.03!11 0.19 0.02!12 0.16 0.02!13 0.15 0.02!22 0.17 0.02!23 0.16 0.02!33 0.18 0.02
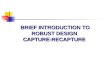
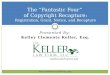
Estimates of the posterior means of the parameters are given in Table 2. These are basedon a MCMC simulation using WinBUGS with a burn-in period of 500 iterations followed by4000 iterations. We observe that the detection probabilities pj are high and are similar acrossthe dams. We note that the daily survival probabilities q1, q2, and q3 decrease and this appearsto make biological sense. With respect to the estimated travel-time parameter µ, we refer toFigure 1 which provides density plots of the observed travel times between dams. The averagetravel times between the three dams are 9.9, 3.6, and 1.9 days, respectively. These values areroughly in agreement with MCMC estimates of the mean interval travel times (e.g. E(ti1) &exp(µ1 +!11/2)) which are 10.3, 4.6, and 2.7 days, respectively. Figure 2 provides an estimateof the posterior density of µ1 using a kernel smoother fromWinBUGS. The plot suggests a nearlysymmetric unimodal distribution as might be expected. We observe strong positive correlationsin the ! matrix; this is expected as we are modelling cumulative travel times.

16 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
FIGURE 1: Density plots for observed travel times tij (days) in Example 5.2.
FIGURE 2: Estimate of the posterior density of µ1 in Example 5.2.
It is instructive to look at some plots related to the MCMC simulation. A trace plot for µ1
is given in Figure 3. The trace plot appears to stabilize immediately and hence provides noindication of lack of convergence in the Markov chain. In Figure 4, an autocorrelation plot forµ1 is provided. The autocorrelations appear to dampen quickly. This provides added evidenceof the convergence of the Markov chain and also suggests that it may be appropriate to averageMarkov chain output as though the variates were independent. Similar plots were obtained forall of the parameters in the model. In addition to the diagnostics described, multiple chains were

2008 MARK-RECAPTURE DATA 17
obtained to provide further assurance of the reliability of the methods. For example, the Brooks–Gelman–Rubin statistic (Brooks & Gelman 1997) gave no indication of a lack of convergence.
As discussed in Section 3.1, nonidentifiability poses neither a theoretical nor a practical ob-stacle for the model proposed in this paper. To investigate the degree of confounding between thefinal capture rate p3 and the final daily survival probability q3, we calculate the posterior corre-lation between p3 and q3 using the output from the MCMC simulation. The posterior correlationis found to be 0.02 which indicates a lack of confounding between the final capture rate and thefinal daily survival probability.
FIGURE 3: Trace plot for µ1 based on MCMC simulation in Example 5.2.
FIGURE 4: Autocorrelation plot for µ1 based on MCMC simulation in Example 5.2.
In assessing model adequacy, we have mentioned that a model with diffuse priors will almostalways be viewed as adequate. The reason for this is that a model with diffuse parameters givesrise to diffuse data, and observed data is unlikely to be seen as inconsistent when compared todiffuse data. To provide a more stringent test, we consider a modification of our model wheresubjective priors are introduced. Since we know a priori that the listening lines and acousticdevices are of high quality, we assign prior probabilities of detection according to independent

18 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
[pj ] " Beta (19, 1). We also know that daily survival probabilities are high and we thereforeset independent [qj ] " Beta (18, 2). The prior distribution for the log cumulative travel times isa constrained multivariate normal distribution with mean vector and variance covariance matrixgiven by the posterior means from the initial analysis. This distribution is roughly consistent withthe data and is far less diffuse. With this model, the posterior means of the primary parametersare very close to estimates provided in Table 2. This suggests that the data are informative anddominate the inferences. To assess model fit, we generated 20 datasets from the prior predictivedensity (12) according to the model described above, and compared the generated data with theobserved data. Although there are many features of the data that could be checked, we focus on astudy of detection history ! and cumulative travel time T . For !, Figure 5 provides a histogramof the proportion of fish detected in the simulated datasets. For each simulation, the proportiondetected is given by
+324i=1
+3j=1 !ij/(924). The proportion detected for the observed data is
0.70 which appears consistent with the model. For T , there appears to be no limit on the numberof features that one may check. For illustration we consider the travel time to the first dam.Figure 6 provides a boxplot for each generated dataset using the 324 total travel times Ti1. Theboxplot for the observed data is also included and appears to be consistent with the generateddata.
FIGURE 5: Histogram of the proportion of fish detected for the observed data and the 20 generateddatasets in Example 5.2.
To check whether the travel-time assumption is relevant to the Columbia river data, we fit asecond model that is analogous to the model considered by Cowen & Schwarz (2005). We keepeverything the same as in the initial model with the diffuse priors, but let "ij = "j rather than"ij = q
tij
j . For the Cowen and Schwarz (2005) model, we obtain BIC = 3988.8, which is muchworse than the initial model with BIC = 2521.1. The extremely bad fit of the Cowen & Schwarz(2005) model may have been anticipated, as Figure 1 suggests large travel time differences be-tween the three dams.
6. DISCUSSIONThe Bayesian framework provides a straightforward approach to dealing with the complex ob-served likelihood which requires integration over the unobservable travel times. Furthermore,the Bayesian approach provides a convenient way of estimating the correlation in travel times

2008 MARK-RECAPTURE DATA 19
between sampling locations. This addresses an important biological question as to whether somefish are intrinsically faster, or whether travel times are independent random events.
FIGURE 6: Boxplots of the travel time Ti1 to the first dam for the observed data and the 20 generateddatasets in Example 5.2.
An alternative approach might be based on the EM algorithm as used by van Deusen (2002).However, the computation of the expected log-likelihood is not straightforward and numeri-cal methods would likely be needed. In our Bayesian approach, Markov chain Monte Carlo(MCMC) methods avoid the necessity of numerical integration.
Finally, our model is easily extended to allow for individual time-independent covariates suchas initial body mass mij by modelling qij = f(mij) for some function f . Work is underwayto extend our formulation to allow for time-dependent individual covariates and to more fullyinvestigate the choice of f . The revised model must account for missing values both in the traveltimes and in the individual covariates.
It is not immediately clear how our model might be extended to a two-dimensional spatialsetting. For example, listening lines may be set up in the woods to track the movements ofanimals. In this case, in addition to death and radio tag failure, lack of detection may be due tononstandard travel paths. We consider this to be an open research problem.
ACKNOWLEDGEMENTSThe authors thank the Editor and two anonymous referees for helpful comments that led to an improvementin the paper. Muthukumarana was partially supported by a MITACS fellowship. Schwarz and Swartz werepartially supported by Discovery grants through the Natural Sciences and Engineering Research Council ofCanada (NSERC). The WinBUGS code and the R code used in this paper are available from the first authorupon request.
REFERENCESM. Aitken (1991). Posterior Bayes factors. Journal of the Royal Statistical Society Series B, 53, 111–114.H. Akaike (1973). Information theory and an extension of the maximum likelihood principle. In Sec-
ond International Symposium on Information Theory (B. Petrov & F. Csaki, eds.), Akademiai Kiado,Budapest, pp. 267–281.

20 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
S. J. Bonner & C. J. Schwarz (2006). An extension of the Cormack–Jolly–Seber model for continuouscovariates with application toMicrotus pennsylvanicus. Biometrics, 62, 142–149.
G. E. Box (1980). Sampling and Bayes’ inference in scientific modelling and robustness (with discussion).Journal of the Royal Statistical Society Series A, 143, 383–430.
S. P. Brooks, E. A. Catchpole & B. J. T. Morgan (2000). Bayesian animal survival estimation. StatisticalScience, 15, 357–376.
S. P. Brooks & A. Gelman (1997). Alternative methods for monitoring convergence of iterative simulations.Computational and Graphical Statistics, 7, 434–455.
K. P. Burnham, D. R. Anderson, G. C. White, C. Brownie & K. H. Pollock (1987). Design and AnalysisMethods for Fish Survival Experiments Based on Release-Recapture. Monograph 5, American Fish-eries Society, Bethesda, Maryland.
B. P. Carlin & T. A. Louis (2000). Bayes and Empirical Bayes Methods for Data Analysis, Second edition.Chapman & Hall, London.
R. M. Cormack (1964). Estimates of survival from the sighting of marked animals. Biometrika, 51, 429–438.
L. Cowen & C. J. Schwarz (2005). Capture-recapture studies using radio telemetry with premature radio-tagfailure. Biometrics, 61, 657–664.
F. DeSantis & F. Spezzaferri (1997). Alternative Bayes factors for model selection. The Canadian Journalof Statistics, 25, 503–515.
J. A. Dupuis (1995). Bayesian estimation of movement and survival probabilities from capture-recapturedata. Biometrika, 82, 761–772.
A. E. Gelfand, D. K. Dey & H. Chang (1992). Model determination using predictive distributions withimplementation via sampling-based methods (with discussion). In Baysian Statistics 4 (J. M. Bernardo,J. O. Berger, A. P. Dawid & A. F. M. Smith, eds.), Oxford University Press, Oxford, pp. 147–167.
A. Gelman, J. B. Carlin, H. S. Stern & D. B. Rubin (2003). Bayesian Data Analysis, Second edition.Chapman & Hall, London.
A. Gelman, X. L. Meng & H. S. Stern (1996). Posterior predictive assessment of model fitness via realizeddiscrepancies. Statistica Sinica, 6, 733–807.
W. R. Gilks, S. Richardson & D. J. Spiegelhalter, eds. (1996). Markov Chain Monte Carlo in Practice.Chapman & Hall, London.
O. Gimenez, C. Crainiceanu, C. Barbraud, S. Jenouvrier & B. J. T. Morgan (2006). Semiparametric regres-sion in capture-recapture modelling. Biometrics, 62, 691–698.
G. M. Jolly (1965). Explicit estimates from capture-recapture data with both death and immigration-stochastic model. Biometrika, 52, 225–247.
R. E. Kass & A. E. Raftery (1995). Bayes factors. Journal of the American Statistical Association, 90,773–795.
P. W. Laud & J. G. Ibrahim (1995). Predictive model selection. Journal of the Royal Statistical SocietySeries B, 57, 247–262.
J. Lebreton, K. P. Burnham, J. Clobert & D. R. Anderson (1992). Modelling survival and testing biologicalhypotheses using marked animals: a unified approach with case studies. Ecological Monographs, 62,67–118.
X.-L. Meng (1994). Posterior predictive p-values. The Annals of Statistics, 22, 1142–1160.S. Muthukumarana (2007). Bayesian Modelling and Software Development for the POST Project. MSc
project, Department of Statistics and Actuarial Science, Simon Fraser University, Burnaby, BC,Canada.
K. H. Pollock, C. M. Bunck, S. R. Winterstein & C. Chen (1995). A capture-recapture survival analysismodel for radio-tagged animals. Journal of Applied Statistics, 22, 661–672.
G. Schwarz (1978). Estimating the dimension of a model. The Annals of Statistics, 6, 461–464.G. A. F. Seber (1965). A note on the multiple recapture census. Biometrika, 52, 249–259.D. J. Spiegelhalter, N. G. Best, B. P. Carlin & A. van der Linde (2002). Bayesian measures of model
complexity and fit (with discussion). Journal of the Royal Statistical Society Series B, 64, 583–639.

2008 MARK-RECAPTURE DATA 21
D. J. Spiegelhalter, A. Thomas & N. G. Best (2003). WinBUGS (Version 1.4) User Manual. MRC Biosta-tistics Unit, Cambridge.
T. B. Swartz, Y. Haitovsky, A. Vexler & T. Yang (2004). Bayesian identifiability and misclassification inmultinomial data. The Canadian Journal of Statistics, 32, 285–302.
P. C. van Deusen (2002). An EM algorithm for capture-recapture estimation. Environmental and EcologicalStatistics, 9, 151–165.
Received 15 October 2006 Saman MUTHUKUMARANA: [email protected] 10 July 2007 Carl J. SCHWARZ: [email protected]
Tim B. SWARTZ: [email protected] of Statistics and Actuarial Science
Simon Fraser University, BurnabyBritish Columbia, Canada V5A 1S6
Discussion:Towards a Bayesian analysis template?Olivier GIMENEZ
1. INTRODUCTIONI would like to congratulate Drs Muthukumarana, Schwarz and Swartz (henceforth MSS) forextending classical mark-recapture models to estimate survival in a complex situation arisingfrom fish monitoring. Because of their model likelihood complexity, MSS used Markov chainMonte Carlo (MCMC) simulations to implement a Bayesian analysis of their data. The Bayesianframework in association with MCMC algorithms is becoming increasingly popular for fittingcomplex models such as models with latent structures. Two of the main reasons for this arethat (i) MCMC methods are well suited to circumvent the issue of high-dimensional integralsinvolved in these likelihoods and, (ii) fast and powerful computers along with flexible andreliable programs are now available allowing the relatively time-realistic and easy implementa-tion of various MCMC routines. This being said, the possibility to fit complex models comeswith methodological issues that should not be overcome. In that sense, MSS have providedan impressive work that deserves to be emphasized. In this discussion, I comment on severaltechnical points and give general considerations that were inspired by the MSS paper.
2. TECHNICAL POINTS
2.1. Model selection.To determine whether a model specifying survival as a function of travel times was bettersupported by the data than without, MSS relied on BIC as it was easy to implement withinWinBUGS. As acknowledged by MSS, this was one choice among many alternatives, and thisis precisely the Achilles’ heel of Bayesian analyses. Indeed, many procedures exist and noneof them seems to be as consensual as AIC is in the statistical ecology literature (Burnham &Anderson 2002). Basically, there are two groups of methods. One produces a value for eachmodel to be compared among a set of models (e.g., mean square predictive error: Gelfand &Ghosh 1998; DIC: Spiegelhalter, Best, Carlin & van der Linde 2002; BIC: for example, Link& Barker 2007), and the other performs automatic exploration of the model space (e.g., Gibbsvariable selection: George & McCulloch 1993; reversible jump MCMC: Green 1995). Most

22 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
often, we adopt one option or another because it is convenient to calculate, or because we arefamiliar with it. MSS went for a method belonging to the first family of methods, in line withrecent recommendations (Link & Barker 2007). Interestingly, reversible jump MCMC is nowimplemented in WinBUGS, and MSS could have used it to compare models. This raises theissue of which method to use. Unfortunately, I’m not aware of any comparison or any reviewthat might give clear guidelines. Having made clear what each method does, the performancesof several candidate methods could be assessed by calculating frequencies of ranking the truemodel as best in Monte Carlo simulations.
2.2. Identifiability and convergence issues.We are often provided with, even in biological papers, technical details regarding convergenceof the MCMC algorithms, while it wouldn’t come to one’s mind to mention anything aboutconvergence in a classical analysis. This is probably because the procedures in the formercase have not yet been implemented in an automatic way, and further work is needed in thatdirection. MSS have paid careful attention to the identifiability issue, and demonstrated thattheir model was not parameter redundant. Note that formal methods were developed to assessparameter redundancy of probabilistic models that could be used here too (review in Gimenez etal. 2005). Nevertheless, a cause of poor MCMC convergence is weak identifiability (rather thannonidentifiability) because it leads to large autocorrelations. Calculating the overlap betweenprior and posterior parameter distributions can help in diagnosing weak identifiability (Garrett& Zeger 2000; Gimenez, Morgan & Brooks 2008). Practical recommendations on checkingMCMC convergence are given by experienced statisticians in Kass, Carlin, Gelman & Neal(1998) and comparisons of several available methods can be found in El Adlouni, Favre &Bobee (2006).
2.3. Goodness-of-fit testing.Goodness–of–fit testing has received little attention in the Bayesian literature and only a fewmethods are available, which are reviewed by MSS: Bayesian p-values, cross-validation, andanother approach developed by Box (1980). Here again, I’m not aware of any evaluation of thefrequentist properties (nominal level and power) of these methods. Besides, these procedurestend to be ’omnibus’, in that the alternative hypothesis is simply stated as ’the model does not fitthe data at hand’, without any further indication as to where to go then. Once again, the Bayesianapproach may benefit from getting closer to a classical framework. Indeed, goodness-of-fittesting procedures are well developed for single (Lebreton, Burnham, Clobert & Anderson1992) and multistate (Pradel, Wintrebert & Gimenez 2003) mark-recapture models (review inPradel, Gimenez & Lebreton 2005). These methods rely on contingency tables that specifywell-identified alternative hypotheses (e.g., a trapping effect on recapture probabilities or amemory effect on movement probabilities), which, in case of rejection, are invaluable when itcomes to building a model which fits the data better.
2.4. Even more complexity?I have two further minor suggestions that might help to improve the MSS model. First, MSSmade the strong assumption that variation in survival could be fully explained by travel timesvariation. However, if some extra variation exists, then bias may occur in parameter estimates(Barry, Brooks, Catchpole & Morgan 2003). By using a state-space formulation of their model(Gimenez et al. 2007), MSS could have incorporated individual random effects to cope with(potential) unexplained sources of variability in survival (see Clark et al. 2005; Gimenez et al.2006; Zheng, Ovaskainen, Saastamoinen & Hanski 2007; Royle 2008). Second, MSS wonderhow their model might be extended to a two–dimensional spatial setting. We have recently

2008 MARK-RECAPTURE DATA 23
extended our nonparametric approach dealing with complex relationships between survival andcovariates that was mentioned by MSS (Gimenez et al. 2006; see also Gimenez et al. 2006 inthe Additional References) to cope with bivariate smoothing (Gimenez & Barbraud 2008). Thismethodology has also potential applications in ecology in order to estimate spatial synchrony,as well as in evolutionary biology in order to estimate fitness surfaces made of quantitativephenotypic traits.
3. GENERAL CONSIDERATIONS
3.1. Bayes or not Bayes: is that the question?As a biostatistician, I have long adopted an eclectic and pragmatic approach and have been usingeither the Bayesian or the frequentist approach based on a few empirical criterions such as thetime it takes to get results, the ease of programming and the nature of the biological question (isthere any added value of going for a Bayesian analysis?). From a practitioner’s point of view,it is worth repeating that, although it may appear obvious, both approaches are complementary,provided that one is careful in using the terminology. As a nice illustration of this statement,I would like to draw attention to the MCMC procedure recently proposed by Lele, Dennis &Lutscher (2007) which has the appealing feature of producing maximum likelihood estimates.It is fair to say that the Bayes approach is rarely used for what it is intrinsically, but rather asan excuse for implementing the MCMC machinery to cope with complex multidimensionallikelihoods. Examples of incorporating prior information are still too few (see, however, Martin,Kuhnert, Mengessen & Possingham 2005; McCarthy & Masters 2005), probably due to ourfeebleness as referees, while every biologist would agree never to start a new data analysiswithout prior knowledge of the system.
3.2. Transfer to biologists.Obviously, in a pragmatic approach, the key question is ’why should I go for a Bayesian analysis’.The answer depends obviously on the analyst and the question, but several steps may be taken tohelp in deciding whether jumping or not into new territory is worth the price.
• We should think more of teaching Bayesian theory in introductory statistics courses, al-though some colleagues still hesitate to do so. I’ve taught both Bayesian and frequentisttheories this year in a statistical modelling course for Masters students in ecology and evo-lutionary biology. The discussions were stimulating, focusing mainly on the incorporationof prior information and on when to use one or the other method. I will repeat this nextyear as I think that this lecture has not only added an arrow to their bow, but it has alsocontributed to the development of their critical mind.
• Several excellent textbooks are now available which encourage self–teaching, for appliedstatistician readers (Gilks, Richardson & Spiegelhalter 1996; Lee 1997; Carlin & Louis2000; Congdon 2003; Gelman, Carlin, Stern & Rubin 2003; Congdon 2006) as well asfor biologist readers (Clark 2007; McCarthy 2007), and many others will surely follow.Attending Bayesian workshops is another very efficient way of learning new material,which has the non negligible advantage of keeping us stuck somewhere (often in exoticplaces) with limited risk of being disturbed.
• To encourage codes and data sharing, we militate with other colleagues for the creation of astatistical ecology internet platform, with a format similar to Genbank (Benson et al. 2007)in genetics, a database to which nucleotides sequences are submitted prior to publication.This web site would gather material (in particular BUGS codes) that have been used inpublications, and would avert the too convenient statement ’the code is available uponrequest from the authors’ which I have used myself too often.

24 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
• Related to that, user-friendly and reliable pieces of software are needed. WinBUGS(Spiegelhalter, Thomas & Best 2003) is very flexible (Gimenez et al. 2008), but couldgain in conviviality (e.g., by improving its debugging capabilities and implementing inroutine several simple analyses). The efforts to build a dialog between R and WinBUGSinitiated through the R package R2WinBUGS (Sturtz, Ligges & Gelman 2005) shouldbe continued. An alternative to WinBUGS is AD–Model Builder (Fournier 2001), whichseems to be much quicker, but is neither free nor open-source, as is WinBUGS.
Overall, teaching (and research) in ecological statistics largely benefits from collaborationbetween statisticians and biologists.
4. CONCLUSIONSHierarchical analysis of data on marked animals (Clark et al. 2005; Pradel 2005; Gimenez etal. 2007; Zheng, Ovaskainen, Saastamoinen & Hanski 2007; Royle 2008) is experiencing anincreasing number of applications in ecology, conservation and evolutionary biology, thanks tothe Bayesian framework in conjunction with MCMC methods for its implementation. Note thateven though this combination has many advantages, I do not mean to overlook other methodsthat are valuable to fit models with latent structures, such as particle filtering (Buckland, New-man, Thomas & Koesters 2004; Thomas, Buckland, Newman & Harwood 2005), Kalman filter-ing (Besbeas, Freeman, Morgan & Catchpole 2002) and Newton-type algorithms (Pradel 2005).Even better, we still need to explore other methods since, although the Bayesian framework ismore than three centuries old, we have to confess that its practical implementation using MCMCsimulations is not as mature as maximum likelihood analyses using standard optimization meth-ods. AsMuthukumarana, Schwarz and Swartz acknowledge, potential issues may arise at varioussteps of the analysis, such as model identifiability, convergence assessment, model selection andgoodness-of-fit testing. We see, however, good signs of a trend towards clear guidelines on howto carry out a Bayesian analysis using MCMC algorithms, the paper by MSS being an importantcontribution in that direction. In that spirit, and besides the original development of new modelsfor fish monitoring, I consider the paper by MSS as a successful attempt to produce a Bayesiananalysis template for future data analyses.
ACKNOWLEDGEMENTSMany thanks to B. J. T. Morgan who encouraged me to do my first steps in the Bayesian theory while I washis research fellow working at the university of Kent, and to Rachel Borysiewicz who checked my Englishwith patience.
Received 7 November 2007 Olivier GIMENEZ: [email protected] 7 November 2007 Centre National de la Recherche Scientifique
Centre d’Ecologie Fonctionnelle et Evolutive –UMR 51751919 Route de Mende, 34293 Montpellier Cedex 5, France
Authors’ response
We thank Gimenez for his commentary on our article—we agree with him on virtually all of hispoints.

2008 MARK-RECAPTURE DATA 25
Swartz was born a Bayesian, Muthukumarana is a novice, and Schwarz is a heretic whoconverted from likelihood methods. We share many of Gimenez’s frustrations with the Bayesianapproach in capture-recapture. Perhaps some of us have too many grey hairs and find it difficultto learn new tricks, but the transition from likelihood methods to Bayesian methods has not beenwithout much soul-searching and questioning.
1.MODEL SELECTIONSome of us like the likelihood AIC paradigm – all models are wrong, so if several models seemto fit the data equally well, why not combine inference over these models rather than searchingfor the best single model. A possibility is to do the same using Bayesian methods although thisrequires additional complexity and computation.
Like Gimenez, given that Bayes factors can rarely be computed in complex models, we findthe Bayesian alphabet soup (AIC, DIC, BIC, etc) somewhat confusing. We are also uneasy aboutsome uses of RJMCMCmethods where there are literally millions of potential models (e.g. Kinget al. 2006). The first rule in using likelihood-AIC methods is NOT to data dredge, but to startwith a carefully selected set of candidate models. This advice seems to be discarded in theselarge scale reversible jump MCMC applications where the model space can’t even be listed inadvance because it is so large. We wonder about the reliability of inference when millions ofMCMC iterations cannot possibly cover the entire model space.
In cases like this, perhaps a better model selection summary is available? Rather than pro-ducing the probability of individual models, perhaps obtaining the probability of related groupsof models would be more useful? For example, in King, Brooks, Morgan & Coulson (2006), thenumber and size of age classes was explored. The probability of a model for a given age classstructure or all models that are subsets of this age class structure seems appropriate.
2.GOODNESS-OF-FITOne approach to Bayesian goodness-of-fit involves model comparison between the current modeland a very general but well-fitting model. This approach suggests the use of model selectionmethods rather than trying to mimic likelihood methods via Bayesian p-values, etc. This could bea viable strategy for goodness-of-fit against specified alternatives, but is it possible to determinean adequate and “fully-saturated model” in the Bayesian context?
We are also somewhat at a loss on how to deal with goodness-of-fit for these very complexmodels. In likelihood methods, the basic goodness-of-fit tests in mark-recapture methods arecomparisons between the observed and expected counts of various histories. However, in com-plex models such as in this paper, every history (a combination of where and when captured) islikely unique, and this approach breaks down. There have been many paper in the literature deal-ing with sparse multinomial models (e.g., Simonoff, 1985; Eubank, 1997) which assume localsmoothness in the cells which would seem like a logical way to proceed, but we are unaware ofany such methods being used for capture-recapture.
3.INFLUENCE OF PRIORSOne of the powerful advantages of Bayesian methodology is the ability to include useful priorinformation. Yet, lip service is often paid to this idea; indeed, “uninformative” priors are oftenused where the data are supposed to speak for themselves. Some of us feel that there are actuallytwo stages of inference that ought to be practiced. In the first stage, we find it appealing tosee what the data from the experiment, and the experiment alone are saying. In this case, non-informative priors would be utilized. In the second stage, a Bayesian analysis using subjectiveprior information would be carried out. The two-stage procedure permits a comparison of therelative importance of data versus prior opinion. In practice, we find that the second step is rarelydone. Often, it is difficult to summarize the state of knowledge about a parameter and researcherswant to avoid comments from referees that the prior ignored paper x or paper y.

26 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
Another reason for the choice of noninformative priors is the (naive) belief that the resultsare not influenced by the prior. Schwarz must admit that he has made this mistake in thinking.He finds it unintuitive that a flat beta prior on p in a binomial experiment has the “effect” ofadding “1” to the sample size when the posterior is examined. In his naive thinking, Schwarzwould like (uninformative) priors to “subtract” 1 from the sample sizes! And how can priors beuninformative when there are sometimes several uninformative priors to choose from in a givenproblem?
Gimenez’s suggestion of looking at the overlap between the prior and posterior distribu-tions (see the additional references) appears to be one way to see how much new informationis contributed by the data over the prior. This could be an “automated” approach to lookingat the relative contribution of information from priors and data, but another (admittedly) naiveapproach would be to simply look at the difference between the maximum likelihood estimator(MLE) and the mean of the posterior. Presumably if the MLE cannot be explicitly computed, astochastic MLE could be found, as outlined in Lele, Dennis & Lutscher (2007).
4.TECHNOLOGY TRANSFER
Gimenez’s suggestion of an MCMC bank for code is extremely useful. The ‘wiki’ paradigm maybe more useful where code can be modified and improved. An impediment, unfortunately, is thecommon problem that the reward system in most academic institutions is completely orthogonalto collaborative approach of this sort.
We also agree with Gimenez’s comments about the difficulty in using WINBUGS. Exceptfor simple problems, we find that using this package is not for the faint of heart. We hope thatour WINBUGS can serve as a foundation for future applications in capture recapture.
We cannot emphasize too strongly the importance of exercising code using simulated data(with enormous sample sizes) where the answers are known in advance and MCMC simulationerror will be negligible. These simulation exercises should try a variety of parameter values andscenarios. Here we grey-haired members of the community actually have an advantage overnewcomers as this was common practice when debugging FORTRAN or other codes, but israrely practiced now.
5.FINAL REMARKSAs Gimenez notes, the Bayesian paradigm together with MCMC methods, allows more complexmodels to be fit than when using standard likelihood theory. But, at the same time, the fundamen-tal problems of model selection, model averaging and goodness-of-fit are seldom straightforward.
We found that our team worked well on this paper. Often new converts are more zealous thanmembers born to a faith, but our varied team kept each other in check. The novice supplied theenergy and drive; the heretic challenged the methods at every step and the cardinal supplied thebackground and wisdom to ensure that the project did not stray from the proper path.
Saman MUTHUKUMARANA: [email protected] J. SCHWARZ: [email protected]
Tim B. SWARTZ: [email protected] of Statistics and Actuarial Science
Simon Fraser University, BurnabyBritish Columbia, Canada V5A 1S6

2008 MARK-RECAPTURE DATA 27
ADDITIONAL REFERENCESS. C. Barry, S. P. Brooks, E. A. Catchpole & B. J. T. Morgan (2003). The analysis of ring-recovery data
using random effects. Biometrics, 59, 54–65.D. A. Benson, I. Karsch-Mizrachi, D. J. Lipman, J. Ostell & D. L. Wheeler (2007). Genbank. Nucleic Acids
Research. 35, D21–D25.P. Besbeas, S. N. Freeman, B. J. T. Morgan & E. A. Catchpole (2002). Integrating mark-recapture-recovery
and census data to estimate animal abundance and demographic parameters. Biometrics. 58, 540–547.G. E. Box (1980). Sampling and Bayes’ inference in scientific modelling and robustness (with discus- sion).
Journal of the Royal Statistical Society Series A, 143, 383–430.S. T. Buckland, K. B. Newman, L. Thomas & N. B. Koesters (2004). State-space models for the dynamics
of wild animal populations. Ecological Modelling, 171, 157–175.K. P. Burnham&D. R. Anderson (2002). Model Selection and Inference: A Practical Information Theoretic
Approach. Second edition. Springer-Verlag. New York.J. S. Clark (2007). Models for Ecological Data: An Introduction. Princeton University Press.J. S. Clark, G. A. Ferraz, N. Oguge, H. Hays & J. DiCostanzo (2005). Hierarchical Bayes for structured,
variable populations: from recapture data to life-history prediction. Ecology, 86, 2232–2244.P. Congdon (2003). Applied Bayesian Modelling. Wiley, Hoboken, New Jersey.P. Congdon (2006). Bayesian Statistical Modelling. Second Edition. Wiley, Hoboken, New Jersey.R. L. Eubank (1997). Testing goodness-of-fit with multinomial data. Journal of the American Statistical
Association, 92, 1084–1093.S. El Adlouni, A.-C. Favre & B. Bobee (2006). Comparison of methodologies to assess the convergence of
Markov chain Monte Carlo methods. Computational Statistics and Data Analysis, 50, 2685–2701.D. Fournier (2001). An introduction to AD MODEL BUILDER Version 6.0.2 for use in nonlinear modeling
and statistics. Available from http://otter-rsch.com/admodel.htmOtter Research ”Integrated Statistical Models”, Sidney, British Columbia.E. S. Garrett & S. L. Zeger (2000). Latent class model diagnosis. Biometrics, 56, 1055–1067.A. E. Gelfand & S. K. Ghosh (1998). Model choice: a minimum posterior predictive loss approach. Bio-
metrika, 85, 1–11.E. I. George & R. E. McCulloch (1993). Variable Selection via Gibbs Sampling. Journal of the American
Statistical Association, 88, 881–889.O. Gimenez, & C. Barbraud (2008). The efficient semiparametric regression modeling of capture-recapture
data: assessing the impact of climate on survival of two Antarctic seabird species. Environmental andEcological Statistics, in press.
O. Gimenez, S. Bonner, R. King, R. A. Parker, S. P. Brooks, L. E. Jamieson, V. Grosbois, B. J. T. Morgan& L. Thomas (2008). WinBUGS for population ecologists: Bayesian modeling using Markov ChainMonte Carlo methods. Environmental and Ecological Statistics, in press.
O. Gimenez, R. Covas, C. R. Brown, M. D. Anderson, M. Bomberger Brown & T. Lenormand (2006). Non-parametric estimation of natural selection on a quantitative trait using mark-recapture data. Evolution,60, 460–466.
O. Gimenez, B. J. T. Morgan & S. P. Brooks (2008). Weak identifiability in models for mark-recapture-recovery data. Environmental and Ecological Statistics, in press.
O. Gimenez, V. Rossi, R. Choquet, C. Dehais, B. Doris, H. Varella, J.-P. Vila & R. Pradel (2007). State-space modelling of data on marked individuals. Ecological Modelling, 206, 431–438.
O. Gimenez, A. Viallefont, R. Choquet, E. A. Catchpole & B. J. T. Morgan (2005). Methods for investigat-ing parameter redundancy. Animal Biodiversity and Conservation, 27, 561–572.
P. Green (1995). Reversible Jump Markov Chain Monte Carlo Computation and Bayesian Model Determi-nation. Biometrika, 82, 711–732.
R. E. Kass, B. P. Carlin, A. Gelman & R. M. Neal (1998). Markov chain Monte Carlo in practice: Around-table discussion. The American Statistician, 52, 93–100.
R. King, S. P. Brooks, B. J. T. Morgan & T. Coulson (2006). Factors Influencing Soay Sheep Survival: ABayesian Analysis. Biometrics, 62, 211–220.
P. M. Lee (1997). Bayesian Statistics: An Introduction, Second Edition. Wiley, New York.

28 MUTHUKUMARANA, SCHWARZ & SWARTZ Vol. 36, No. 1
S. R. Lele, B. Dennis & F. Lutscher (2007). Data cloning: easy maximum likelihood estimation for complexecological models using Bayesian Markov chain Monte Carlo methods. Ecology Letters, 10, 551–563.
W. A. Link & R. J. Barker (2007). Model weights and the foundations of multimodel inference. Ecology,87, 2626–2635.
T. G. Martin, P. M. Kuhnert, K. Mengessen & H. P. Possingham (2005). The power of expert opinion inecological models using Bayesian methods: Impact of grazing on birds. Ecological Applications, 15,266–280.
M. A. McCarthy (2007). Bayesian Methods for Ecology. Cambridge University Press.M. A. McCarthy & P. Masters (2005). Profiting from prior information in Bayesian analyses of ecological
data. Journal of Applied Ecology, 42, 1012–1019.R. Pradel (2005). Multievent: An extension of multistate capture-recapture models to uncertain states.
Biometrics, 61, 442–447.R. Pradel, O. Gimenez & J.-D. Lebreton (2005). Principles and interest of GOF tests for multistate capture-
recapture models. Animal Biodiversity and Conservation, 28, 189–204.R. Pradel, C. M. A. Wintrebert & O. Gimenez (2003). A proposal for a goodness-of-fit test to the Arnason-
Schwarz multisite capture-recapture model. Biometrics, 59, 43–53.J. A. Royle (2008). Modeling individual effects in the Cormack-Jolly-Seber model: A state-space formula-
tion. Biometrics, in press.J. S. Simonoff (1985). An Improved Goodness-of-Fit Statistic for Sparse Multinomials . Journal of the
American Statistical Association, 80, 671–677.S. Sturtz, U. Ligges & A. Gelman (2005). R2WinBUGS: a package for running WinBUGS from R. Journal
of Statistical Software, 12, 1–16.L. Thomas, S. T. Buckland, K. B. Newman & J. Harwood (2005). A unified framework for modelling
wildlife population dynamics. Australian and New Zealand Journal of Statistics, 47, 19–34.C. Zheng, O. Ovaskainen, M. Saastamoinen & I. Hanski (2007). Age-dependent survival analyzed with
Bayesian models of mark-recapture data. Ecology, 88, 1970–1976.