Embed Size (px)
Citation preview

SURESH KUMAR SUTHARRoll No: 520776763BCA 3rd Semester
BC0042 – 01
OPERATING SYSTEMS
Part-A
1. List out salient Operating System functions.
Ans:
Modern operating systems generally have following three major goals. Operating
systems generally accomplish these goals by running processes in low privilege
and providing service calls that invoke the operating system kernel in high-
privilege state.
Operating System Function:
i) To hide details of hardware
ii) Resources Management
iii) Provide of Operating System
2. List out major components of Operating System
Ans:
Modern operating systems share the same goal of supporting the following types
of system components:
i) Process Management
ii) Main-Memory Management
iii) File Management
iv) I/O System Management
v) Secondary-Storage Management
vi) Networking
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
1

vii) Protection System
viii) Command Interpreter System
3. Define Process.
Ans:
A process is created to execute a command. The code file for the command is
used to initialize the virtual memory containing the user code and global variable.
The user stack for the initial thread is cleared, and the parameters to the
command are passed as parameters to the main function of the program. Files
are opened corresponding to the standard input and output (Keyboard an screen,
unless file redirection is used).
4. Define Threads.
Ans:
A thread is an instance of execution (the entity that executes). All the threads that
make up a process share access to the same user program, virtual memory,
open files, and other operating system resources. Each thread has its own
program counter, general purpose registers, and user and kernel stack. The
program counter and general purpose registers for a thread are stored in the
CPU when the tread is executing.
5. Mention the necessary conditions for Deadlock occurrence.
Ans:
In order for deadlock to occur, four conditions must be true.
i) Mutual Exclusion- Each resource is either currently allocated to
exactly one process or it is available.
ii) Hold and Wait- Processes currently holding resources can request
new resources
iii) No Preemption- Once a process holds a resource; it cannot be taken
away by another process or the kernel.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
2

Part-B
1. Write a note on:
Real Time Operating Systems (RTOS)
Distributed Operating Systems
Ans:
Real Time Operating Systems (RTOS):
The advent of timesharing provided good response times to computer users,
However, timesharing could not satisfy the requirements of some applications.
Real-time (RT) operating systems were developed to meet the response
requirements of such applications.
There are two flavors of real-time systems. A hard real-time system guarantees
that critical tasks complete at a specified time. A less restrictive type of real time
system is soft real-time system, where a critical real-time task gets priority over
other tasks, and retains that priority until it completes. The several areas in which
this type is useful are multimedia, virtual reality, and advance scientific projects
such as undersea exploration and planetary roves. Because of the expanded
uses for soft real-time functionality, it is finding its way into most current operating
systems, including major versions of Unix and Windows NTOS.
A real-time operating system is one, which helps to fulfill the worst-case
response time• requirements of an application. An RT OS provides the
following facilities for this purpose: 1
1. Multitasking within an application.
2. Ability to define the priorities of tasks,
3.Priority driven or deadline oriented scheduling.
4. Programmer defined interrupts.
A task is a sub-computation in an application program, ‘which can be executed
concurrently with other sub-computations in the program, except at specific
places in its execution called synchronization points. Multitasking) which permits
‘the existence of many tasks within the application program provides the
possibility of overlapping the CPU and I/O activities. of the application with one
another. This helps in reducing its elapsed time. The ability to specify priorities
for the tasks provides additional controls to a designer while structuring an
application to meet its response-time requirements.
Real time operating systems (RTOS) are specifically designed to respond to
events that happen in real time. This can include computer systems that run
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
3

factory floors, computer systems for emergency room or intensive care unit
equipment (or even the entire ICU), computer systems for air traffic control, or
embedded systems. RTOSs are grouped according to the response time that is
acceptable (seconds, milliseconds, microseconds) and according to whether or
not they involve systems where failure can result in loss of life.
Distributed Operating Systems:
A recent trend in computer system is to distribute computation among several
processors. In the loosely coupled systems the processors do not share memory
or a clock. Instead, each processor has its own local memory. The processors
communicate with one another using communication network.
The processors in a distributed system may vary in size and function, and
referred by a number of different names, such as sites, nodes, computers and so
on depending on the context. The major reasons for building distributed systems
are;
Resource sharing: if a number of different sites are connected to one another,
then, a user at one site may be able to use the resources available at the other.
Computation speed up: If a particular computation can be partitioned into a
number of sub computations that can run concurrently, then a distributed system
may allow a user to distribute computation among the various sites to run them
concurrently.
Reliability: If one site fails in a distributed system, the remaining sites can
potentially continue operations.
Communication: There are many instances in which programs need to exchange
data with one another. Distributed data base system is an example of this.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
4

2. Write a note on:
Micro Kernel Architecture
Ans:
We have already seen that as UNIX expanded, the kernel became large and
difficult to manage. In the mid-1980s, researches at Carnegie Mellon University
developed an operating system called Mach that modularized the kernel using
the microkernel approach. This method structures the operating system by
removing all nonessential components from the kernel and implementing then
as system and user-level programs. The result is a smaller kernel. There is little
consensus regarding which services should remain in the kernel and which
should be implemented in user space. Typically, however, micro-kernels
provide minimal process and memory management, in addition to a
communication facility.
The main function of the microkernel is to provide a communication facility
between the client program and the various services that are also running in
user space. Communication is provided by message passing. For example, it
the client program and service never interacts directly. Rather, they
communicate indirectly by exchanging messages with the microkernel.
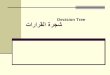
On benefit of the microkernel approach is ease of extending the operating system. All new services are added to user space and consequently do not require modification of the kernel. When the kernel does have to be modified, the changes tend to be fewer, because the microkernel is a smaller kernel. The resulting operating system is easier to port from one hardware design to another. The microkernel also provided more security and reliability, since most services are running as user — rather than kernel — processes, if a service fails the rest of the operating system remains untouched.
Several contemporary operating systems have used the microkernel approach. TruB4 UNIX (formerly Digital UNIX provides a UNIX interface to the user, but it is implemented with a March kernel. The March kernel maps UNIX system calls into ‘messages to the appropriate user-level services.
Device Drivers
File Server
Client Process
•••• Virtual Memory
Microkernel
— Hardware
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
5

Unix Architecture
Ans:
The following figure shows the UNIX operating system architecture. At the
center is hardware, covered by kernel. Above that are the UNIX utilities, and
command interface, such as shell (sh), etc.
UNIX kernel Components
The UNIX kernel has components as depicted in the figure .The figure is divided in to three modes: user mode, kernel mode, and hardware.
The user mode contains user programs which can access the services of
the kernel components using system call interface,
The kernel mode has four major components: system calls, tile
subsystem,
process control subsystem, and hardware control. The system calls are
interface between user programs and tile and process control
subsystems.
The file’ subsystem is responsible for file and I/O management through
device drivers.
The process control subsystem contains scheduler, Inter-process
communication and memory management. Finally the hardware control is
the interface between these two subsystems and hardware.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
6

3. Bring out the features of Best Fit, Worst Fit and First Fit with a block
diagrams illustrating them.
Ans:
In addition to the responsibility of managing processes, the operating system
must efficiently manage the primary memory of the computer. The part of the
operating system which handles this responsibility is called the memory
manager. Since every process must have some amount of primary memory
in order to execute, the performance of the memory manager is crucial to the
performance of the entire system. Nut explains “The Memory Manager is
responsible for allocating primary memory to processes and for assisting the
programmer in loading and storing the contents of the primary memory.
Managing the sharing of primary memory and minimizing memory access
time are the basic goals of the memory manager.”
The real challenge of efficiencies managing memory is seen in the case of a system which has multiple processes running at the same time. Since primary memory can be space-multiplexed, the memory manager can allocate a portion of primary memory to each process for its own use. However, the memory manager must keep track of which processes are running in which memory locations, and it must also determine how to allocate and de-allocate available memory when new processes are created and when old processes complete execution. While various different strategies are used to allocate space to processes competing for memory, three of the most popular are Best fit, Worst fit, and First fit, each of these strategies are described below:
• Best fit: The allocator places a process in the smallest block of unallocated memory in which it will fit, For example, suppose a process requests 12KB of
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
7

memory and the memory manager currently has a list of unallocated blocks of 6KB, 14KB, 19KB, 11KB, and 13KB blocks. The best-fit strategy will allocate 12KB of the 13KB block to the process. • Worst fit: The memory manager places a process in the largest block of unallocated memory available. The idea is that this placement will create the largest hold after the allocations, thus increasing the possibility that., compared to best fit, another process can use the remaining space. Using the same example as above, worst fit will allocate 12KB of the 19KB block to the process, leaving a 7KB block for future use. • First fit: There may be many holes in the memory, so the operating system, to reduce the amount of time it spends analyzing the available spaces, begins at the start of primary memory and allocates memory from the first hole it encounters large enough to satisfy the request. Using the same example as above, first fit will allocate 12KB of the 14KB block to the process.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
8

4. Bring out the salient features of:
Paging
Paging
For paging memory management, each process is associated with a page
table. Each entry in the table contains the frame number of the
corresponding page in the virtual address space of the process. This same
page table is also the central data structure for virtual memory mechanism
based on paging, although more facilities are needed.4.21 Control bits
Since only some pages of a process may be in main memory, a bit in the
page table entry, P in Figure 1(a), is used to indicate whether the
corresponding page is present in main memory or not. Another control bit
needed in the page table entry is a modified bit, M, indicators whether the
content of the corresponding page have been altered or not since the page
was last loaded into main memory. We often say swapping in and swapping
out, suggesting that a process is typically separated into two parts, one
residing in main memory and the other in secondary memory, and some
pages may be removed from one part and join the other. They together
make up of the whole process image. Actually the secondary memory
contains the whole image of the process and part of it may have been
loaded into main memory. When swapping out is to be performed, typically
the page to• be swapped out may be simply overwritten by the new page,
since the corresponding page is already on secondary memory. However
sometimes the content of a page may have been altered at runtime, say a
page containing data. In this case, the alteration should be reflected in
secondary memory. So when the M bit is 1, then the page to be swapped
out should be written out. Other bits may also be used for sharing or
protection.
Segmentation
Segmentation is another popular method for both memory management
and virtual memory. It has a number of advantage:
1. It fits the programmers’ need to organize the programs. With
segmentation, a program may be divided into several segments
with each for a specific function or instructions relating to each
other in some way.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
9

2. Segmentation allows different places of a program to be
complied independently. Thus it is not needed to recompile and
relink the whole program after a single revision is made.
3. Segmentation eases the control of sharing and protection.
5. Define Cache Memory:
Bring out the concepts of Basic Cache Memory structure
Concept of Associative mapping
Fully Associative mapping
Cache Memory:
Cache memory is random access memory (RAM) that a computer
microprocessor can access more quickly than it can access regular RAM.
As the microprocessor processes data, it looks first in the cache memory
and if it finds the data there (from a previous reading of data), it does not
have to do the more time-consuming reading of data from larger memory.
Basic Cache Memory structure:
Processors are generally able to perform operations on operands faster
than the access time of large capacity main memory. Though
semiconductor memory which can operate at speeds comparable with the
operation of the processor exists, it is not economical to provide all the
main memory with very high speed semiconductor men46fC The problem
can be alleviated by introducing a small block of high speed memory called
a cache between the main memory and the processor.
The idea of cache memory is similar to virtual memory in that some active
portion of a low-speed memory is stored in duplicate in a higher-speed
cache memory. When a memory request is generated, the request is first
presented to the cache memory, and if the cache cannot respond, the
request is then presented to main memory.
The difference between cache and virtual memory is a matter of
implementation; the two notions are conceptually the same because they
both rely on the correlation properties observed in sequences of address
references. Cache implementations are totally different from virtual memory
implementation because of the speed requirements of cache.
We define a cache miss to be a reference to a item that is not resident in
cache, but is resident in main memory. The corresponding concept for
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
10

cache memories is page fault, which is defined to be a reference to a page
in virtual memory that is not resident in main memory. For cache misses,
the fast memory is cache and the slow memory is main memory. For page
faults the fast memory is main memory, and the slow memory is auxiliary
memory.
A cache-memory reference. The tag 0117X matches address 01173, so the
cache returns the item In the position X=3 of the matched block
A cell in memory is presented to the cache. The cache searches its directory
of address tags shown in the figure to see if the item is in the cache. If the
item is not in the cache, a miss occurs.
For READ operations that cause a cache miss, the Item is retrieved from
main memory and copied into the cache. During the short period available
before the main-memory operation is complete, some other item in cache is
removed form the cache to make rood for the new item.
The cache-replacement decision is critical; a ..good replacement algorithm
can yield somewhat higher performance than can a bad replacement
algorithm. The effective cycle-time of a cache memory (t0) is the average of
cache-memory cycle time (t0) and main-memory cycle time (tmn) where the
probabilities in the averaging process are the probabilities of hits and misses.
If we consider only READ operations, then a formula for the average cycle-
time is:
teff =tcache +(1-h) tmain
Fully Associative Mapping:
Perhaps the most obvious way of relating cached data to the main memory
address is to store both memory address and data together in the cache. This
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
11

the fully associative mapping approaches. A fully associative cache requires
the cache to be composed of associative memory holding both the memory
address and the data for each cached line. The incoming memory address is
simultaneously compared with all stored addresses using the internal logic of
the associative memory, as shown in Fig. 13. If a match is fund, the
corresponding data is read out. Single words form anywhere within the main
memory could be held in the cache, if the associative part of the cache is
capable of holding a full address.
Thy fully associative mapping cache gives the greatest flexibility of holding
combinations of blocks in the cache and minimum conflict for a given sized
cache, but is also the most expensive, due to the cost of the associative
memory. It requires a replacement algorithm must be implemented in
hardware to maintain a high speed of operation. The fully associative cache
can be formed economically with a moderate size capacity. Microprocessors
with small internal caches often employ the fully associative mechanism.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
12

6. For the following reference string with three page memory frame:
6, 0, 1, 2, 3, 4, 2, 3, 6, 0, 3, 2, 1, 2, 0, 1, 6, 1, 0, 3
a. Apply FIFO algorithm
b. Apply LRU algorithm
c. Apply Optimal algorithm
d. Apply Clock algorithm
Ans:
FIFO
The FIFO policy treats the page frames allocated to a process as a circular
buffer, and pages are removed in round-robin style. It may be viewed as a
modified version of the LRU policy, and this time instead of the least recently
used, the earliest used page is replace since the page that has resided in
main memory for the longest time will also least likely used in the future. This
logic may be wrong sometimes if some part of the program is constantly
used, which thus may lead to more page faults. The advantage of this policy
is that it is one of the simplest page replacement policies to implement, since
all that is needed is a pointer that circles through the page frames of the
process.
Least recently used (LRU)
Although we do not exactly know the future, we can predict the future to
some extent based on the history. Based on the principle of locality, the
page that has not been used for the longest time is also least likely to
be referenced. The LFU algorithm thus selects that page to be replaced.
And experience tells that the LRU policy does nearly as well as the
optimal policy. However since the decision making is based on the
history, the system has to keep the references that have been made all
the way from the beginning of the execution. The overhead would be
tremendous. With the above example, Figure 8 shows there are 4 page
faults in the case of the LRU algorithm.
Optimal
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
13

If we know which page is least likely to be referenced later on, then we simply
select that page, which is undoubtedly the optimal solution. However
unfortunately this is not realistic because we cannot ‘know exactly what is
going to happen in the future. The value of discussing this algorithm is that it
may be a benchmark to evaluate the performance of other algorithms.
Suppose we have a process, which is made up of S pages, and 3 frames in
main memory are allocated for this process. And we already know the
references to those pages are in the order:
232152453252
Clock
The clock policy is basically a variant of the FIFO policy, except that it also
considers to some extent the last accessed times of pages by associating an
additional bit with each frame, referred to as the use bit. And when a page is
referenced, its use bit is set to 1. The set of frames that might be selected for
replacement is viewed as a circular buffer, with which a pointer is associated.
When a free frame is needed but not available, the system scans the buffer to
find a frame with a use bit of 0 and the first frame of this kind will be selected
for replacement. During the scan, whenever a frame with a use bit of 1 is
met, the bit is reset to 0. Thus if all the frames have a use bit of 1, then the
pointer will make a complete cycle through the buffer, setting all the use bits
to 0, and stop at its original position, replacing the page in that frame. And
after a replacement is made, the pointer is set to point to the next frame in the
buffer.
SURESH KUMAR SUTHAR Roll No: 520776763 BC0042 – 01 OPERATING SYSTEMS
14