-
8/7/2019 bridge under moving load
1/18
Engineering Structures 30 (2008)
11601177www.elsevier.com/locate/engstruct
Dynamic impact analysis of long span cable-stayed bridgesunder
moving loads
D. Bruno , F. Greco, P. LonettiDepartment of Structural
Engineering, University of Calabria, 87030 - Rende (CS), Italy
Received 5 September 2006; received in revised form 19 June
2007; accepted 2 July 2007Available online 21 August 2007
Abstract
The aim of this paper is to investigate the dynamic response of
long span cable-stayed bridges subjected to moving loads. The
analysis isbased on a continuum model of the bridge, in which the
stay spacing is assumed to be small in comparison with the whole
bridge length. Asa consequence, the interaction forces between the
girder, towers and cable system are described by means of
continuous distributed functions.A direct integration method to
solve the governing equilibrium equations has been utilized and
numerical results, in the dimensionless context,have been proposed
to quantify the dynamic impact factors for displacement and stress
variables. Moreover, in order to evaluate, numerically, theinuence
of coupling effects between bridge deformations and moving loads,
the analysis focuses attention on the usually neglected
non-standardterms related to both centripetal and Coriolis forces.
Finally, results are presented with respect to eccentric loads,
which introduce both exuraland torsional deformation modes.
Sensitivity analyses have been proposed in terms of dynamic impact
factors, emphasizing the effects producedby the external mass of
the moving system and the inuence of both A and H shaped tower
typologies on the dynamic behaviour of the bridge.c 2007 Elsevier
Ltd. All rights reserved.
Keywords: Moving loads; Dynamic impact factors; Cable-stayed
bridges; A and H shaped towers
1. Introduction
Cable-stayed systems have been employed, frequently, toovercome
long spans, because of their economic and structuraladvantages.
Moreover, improvements in the use of lightweightand high strength
materials have been proposed in differentapplications, and,
consequently, more slender girder crosssections have been adopted.
As a result, the external loadshave become comparable with those
involved by the bridgeself-weight ones and an accurate description
of the effectsof the moving loads is needed to properly evaluate
dynamicbridge behaviour. At the same time, new developments inrapid
transportation systems make it possible to increase theallowable
speed range and trafc load capacity; consequently,the moving system
can greatly inuence the dynamic bridgevibration, by means of
non-standard excitation modes. To thisend, investigation is needed
to quantify the effects produced bythe inertial forces of the
moving system on the bridge vibration.
Corresponding author. Tel.: +39 0984 496914; fax: +39 0984
494045.E-mail address: [email protected] (D. Bruno).
The extension of the moving load problem to longspan
cable-supported bridges requires a consistent
approach,appropriately formulated, in order to fully characterize
thebridge kinematics and traingirder interaction. In the
literature,several studies have been developed, which analyse
dynamicbridge behaviour with respect to different assumptions
andframeworks. In particular, Fryba and Timoshenko [ 1,2],provided
a comprehensive treatment concerning primarilythe dynamic response
of simply supported girder structurestravelled by vehicles, and
analytical as well as numerical
solutions for some specic problems have been presented.During
the last few decades, with advances in high performancecomputers
and computational technologies, more realisticmodelling of the
dynamic interaction between a moving systemand bridge vibration has
become feasible. In particular, Yanget al. [3] presented a
closed-form solution for the dynamicresponse of simple beams
subjected to a series of moving loadsat high speeds, in which the
phenomena of resonance andcancellation have been identied.
Moreover, Lei and Noda [ 4]proposed a dynamic computational model
for the vehicle andtrack coupling system including girder prole
irregularity by
0141-0296/$ - see front matter c 2007 Elsevier Ltd. All rights
reserved.
doi:10.1016/j.engstruct.2007.07.001
http://www.elsevier.com/locate/engstructmailto:[email protected]://dx.doi.org/10.1016/j.engstruct.2007.07.001http://dx.doi.org/10.1016/j.engstruct.2007.07.001mailto:[email protected]://www.elsevier.com/locate/engstruct
-
8/7/2019 bridge under moving load
2/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1161
Nomenclature
Longitudinal stay geometric slope 0 Longitudinal anchor stay
geometric slopeAs Stay cross sectional areaAs0 Anchor stay cross
sectional areab Half girder cross section width Transverse stay
geometric slopec Moving system speed Stay spacing stepe
Eccentricity of the moving loads with respect to
the girder geometric axisE Cable modulus of elasticityE I
Flexural girder stiffnessE A Axial girder stiffnessE s Stay
Dischinger modulusE s0 Anchor stay Dischinger modulusg Girder
self-weight per unit length
Stay specic weightG J t Torsional girder stiffnessH Pylon
heightI p0 Pylon polar mass momentK p Flexural top pylon stiffnessK
p0 Torsional top pylon stiffnessl Lateral bridge spanL Central
bridge spanL p Total train length Mass function of the moving
system per unit
length 0 Polar mass moment of the moving system with
respect to girder geometric axis per unit lengthM p Lumped top
pylon equivalent mass Girder mass per unit length 0 Polar inertial
moment of the girder per unit length Girder torsional rotationp
Live loads a Allowable stay stress g Stay stress under self-weight
loading g0 Anchor stay stress under self-weight loading L ( R) Left
(L) and right ( R) top pylon torsional
rotationsu L( R) Left (L) and right ( R) horizontal top
pylon
displacement
v Girder vertical displacementw Girder horizontal
displacement
the nite element method, whereas additional references tothe
inuence of AASHTO live-load deection criteria on thevibration in a
railway track under moving vehicles can be foundin [57].
With reference to cable-stayed bridges, in order to evaluatethe
amplication effects produced by the moving system,different
investigations have been proposed. In particular, Auet al. [8,9]
investigated the dynamic impact factors of cable-stayed bridges
under railway trafc using various vehicle
models, evaluating the effects produced by random road
surface roughness and long term deection of the concretedeck. An
efcient numerical modelling has been developedby Yang and Fonder [
10] to analyse the dynamic behaviourof cable-stayed bridges subject
to railway loads, taking intoaccount nonlinearities involved in the
cable system. Dynamicinteraction of cable-stayed bridges with
reference to railway
loads has been investigated in [11], in which strategies
toreduce the multiple resonant peaks of cable-stayed bridgesthat
may be excited by high-speed trains have been proposedfor a small
length bridge structure. Finally, a computationalmodel and a
parametric study have been proposed in [ 12]to investigate bridge
vibration produced by vehicular trafcloads. The literature referred
to above investigates dynamicbridge behaviour properly taking into
account the effectsof interaction between bridge vibration and the
movingsystem. However, only a few studies have concentrated onthe
dynamic responses of long span bridges. This paper,therefore,
focuses on the dynamic behaviour of long span cable-stayed bridges,
evaluating the effects produced by the movingsystem on the dynamic
bridge behaviour. In particular, themain aims of this paper are to
propose a parametric studyin a dimensionless context, which
describes the relationshipbetween dynamic amplication factors and
moving loads andbridge characteristics.
The structural model is based on a continuum approach,which has
been widely used in the literature to analyselong span bridges
[1315 ]. In particular, Meisenholder andWeidlinger [13] have
schematized bridge structures as an elasticbeam resting on an
elastic foundation, whose stiffness is strictlyconnected to the
geometrical and stiffness properties of thestays. Moreover,
extended models which generalize the bridge
kinematics have been proposed in [14,15], in which the
stayspacing is assumed to be small in comparison with the
centralbridge span. As a result, the interaction forcesbetween
thecablesystem and the girder can be assumed as continuous
functionsdistributed over the whole girder length. The accuracy of
thecontinuum approach has been validated in previous worksdeveloped
in both static and dynamic frameworks, throughcomparisons with
numerical results obtained by using a niteelement model of the
discrete cable system bridge [1416 ].
In the present paper, the bridge kinematics and the
inertialforces have been considered in a tridimensional context,
inwhich both in-plane and out-of-plane deformation modes havebeen
accounted for. Cable-stayed bridges based on both Hand A shaped
typologies with a double layer of stayshave been considered.
However, cable-stayed bridges withone central layer of stays,
especially for eccentric railwaybridges, are characterized by high
deformability, and difcultiesverifying the design rules on maximum
displacements occurfrequently. In particular, the girder torsional
stiffness needsto be signicantly improved with respect to those
involvedfor H and A shaped typologies, because contributionsarising
from the cable system are practically negligible. Asa matter of
fact, torsional analysis carried out for typicalconcrete or steel
girder cross sections shows that in order tolimit torsional
rotation to reasonable values (i.e. below 0.02),
the maximum allowable central length must be approximately
-
8/7/2019 bridge under moving load
3/18
1162 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
equal to 400 m [16]. The equations of motion for the
vehicle-track-bridge element are derived by means of the
Hamiltonprinciple. Subsequently, the boundary value problem, due
tothe equilibrium equations, was solved, numerically, by meansof a
nite difference scheme based on -family methods,in which proper
interpolation functions on both spatial and
time domains were adopted to obtain stable and accurateresults.
A parametric study in a dimensionless context has beenanalysed by
means of numerical results, in terms of typicalkinematic and stress
bridge variables for both in-plane andeccentric loading conditions.
In particular, results are proposedto investigate the effects of
moving the system descriptionwith reference to non-standard forces,
usually neglected inconventional dynamic analyses, i.e. Coriolis
and centripetalaccelerations. Finally, the inuence on the dynamic
bridgebehaviour of pylon typology with reference to both A andH
shapes has been analysed,and comparisons in terms of bothmoving
loads and tower characteristics have been proposed.
2. Cable-stayed bridge model
To begin with, the bridge geometry is presented withrespect to a
fan-shaped self-anchored scheme and both exuraland torsional
deformation modes are evaluated for an Hshaped pylon typology.
Subsequently, the formulation isadapted for A shaped pylons. This
can be easily derived,as explained in the following sections,
starting from the Hones and introducing slight modications to the
main governingequations. In both formulations, the cable system is
arrangedsymmetrically with respect to both zx and yz planes.
Long span bridges based on cable-stayed systems are
frequently analysed by means of a continuum approach, inwhich
the stays are assumed to be uniformly distributed alongthe deck. In
particular, the stay spacing is quite small incomparison to the
central bridge span (i.e. / L 1). Asa result, the self-weight loads
produce negligible bendingmoments on the girder with respect to
that raised by the movingloads. The initial stress distribution, at
the zero conguration,is supposed to be produced by a correct
erection process whichyields tension in the stays and compression
in both the girderand the pylons. Moreover, under dead loads only,
the girder isarranged with an initial straight prole, which is
practically freefrom bending moments for reduced values of the stay
spacingstep. In particular, the erection procedure is based on the
freecantilevered method, which is able to control the initial
tensiondistribution in the cable system to a value practically
constantin each stay. This assumption has been veried for long
spanbridges, in view of the prevailing truss behaviour of the
cable-supported structures [ 1518]. Therefore, the moving
loadsmodify the initial conguration and, consequently,
produceadditional stress and deformation states. It is worth noting
thatfor long span bridges, the initial stress state produced by
thedead loading needs to be accounted mainly in the
cable-stayedsystem, in which the initial tension strongly affects
the staysbehaviour due to Dischinger effects [ 17,18].
The geometry and stiffness characteristics of the bridges
are
selected with respect to typical ranges suggested by
practical
design rules [ 17,18]. In particular, the cross sectional stay
areasare designed so that the dead loads ( g) produce constant
stressover all the distributed elements, which are assumed equal
toa xed design value, namely g . As a result, the geometricarea of
the stays varies along the girder, but the safety factorsare
practically constant for each element of the cable system.
Moreover, for the anchor stays, the cross sectional
geometricarea, As0 , is designed in such a way that the allowable
stress isobtained in the static case, for live loads applied to the
centralspan only. Therefore, the geometric measurement for the
cablesystem can be expressed by the following equations:
As =g
g sin ,
As0 =gl
2 g1 +
lH
2 1/ 2 L2l
2 1 ,
(1)
where is the slope of a generic stay element with respectto the
reference system, ( L , l , H ) are representative geometriclengths
of the bridge structure, and is the stay spacing step(for more
details see Fig. 1). The bridge analysis is based on thefollowing
assumptions:
(1) the stress increments in the stays are proportional to the
liveloads, p;
(2) a long span fan shaped bridge is characterized by adominant
truss behaviour.
In this framework, the tension g and g0 for distributed
andanchor stays, respectively, can be expressed by the
followingrelations:
g =g
g + p a ,
g0 = a 1 +pg
1 2Ll
2 1 1
.(2)
It is worth noting that the allowable stay stress, a ,represents
a known variable of the cable system in terms of which the design
tension under dead loading can be determinedbythe use ofEq. (2).
Since it is assumed that for dead loads onlythe bridge structure
remains in the undeformed conguration,the application of moving
loads leads to additional stress anddeformation increments with
respect to the self-weight loadingcondition. In particular, as
reported in Fig. 1 with respect tothe reference system with the
origin xed at the midspan girdercross section, the bridge
kinematic, for the H shaped towertypology, is described by
following displacement variables:
horizontal and vertical girder displacements [u ( x , t ),v( x ,
t )],
left and right horizontal pylon top displacements [u L ( t ),u R
( t )],
girder torsional rotation [( x , t )], left and right pylon top
torsional rotations [ L ( t ), R ( t )].
In particular, bridge deformations related to exure andtorsion
for the girder and pylons and axial deformations for
the girder and stays have been taken into account, whereas
-
8/7/2019 bridge under moving load
4/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1163
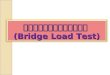
Fig. 1. H shaped tower moving load problem: bridge kinematics
and representative stiffness parameters.
pylon axial deformability has been neglected. Consistentlywith
the bridge conguration reported in Fig. 1, the bridgescheme is
constrained with respect to both vertical and
torsionaldisplacements at boundary cross sections of the bridge and
atgirder/pylon connections.
The stays are modelled as bar elements and thenonlinear
behaviour is evaluated consistently with theDischinger formulation
[ 17], which takes into accountgeometric nonlinearities of the
inclined stays introducing actitious elastic modulus for an
equivalent straight member, inthis way:
E s =E
1 + 2 l20 E
12 30
1+ 2 2
, with = 0
, (3)
where E s is known as the secant Dischinger modulus, E is
theYoungs modulus of the cable material, the specic weight,l0 the
horizontal projection of the stay length and 0 and arethe initial
and actual tension values of the stay, respectively,i.e. 0 = g for
the double layer of stays and 0 = g0 forthe anchor stays. Moreover,
the tangent value of the Dischingermodulus can be obtained from Eq.
(3) by putting = 1. Asfar as the secant modulus is concerned, its
value depends oncable stress statesunder self-weight and live
loading conditions.Sufcient accuracy in the actual stress state
might even beachieved by assuming as proportional to the ratio
betweenlive and self-weight loads (dominant truss behaviour) [1618
],i.e. = a g
p+ gg for the double layer of distributed stays
and = a g p+ g
g( L / 2l )2
( L/ 2l )2 1for the anchor stays. On the
other hand, numerical investigations have been developed
toanalyse the inuence of adopting the secant or the
tangentequivalent moduli on the dynamic impact factors
prediction.
The results, not presented here for the sake of brevity,
show
that this inuence is practically negligible (less than
3%),whereas maximum relative percentage differences, less than10%,
are observed for speeds above 140 m / s. In addition, it hasbeen
observed that the analysed maximum amplication factorsoccur when
the moving system is basically applied on thecentral bridge span.
Therefore, the analysis has been developedby assuming the tangent
modulus for the double layer of staysacting on the lateral spans,
whereas for the double layer of staysacting on the central span and
for the anchor stays the secantmodulus has been employed.
The axial deformation increments of a stay generic for theleft (
L) and right ( R) pylons produced by the moving systemdepend on
both kinematic and geometric variables, as in thefollowing
relationships:
L =1H
[(v b) sin2
(u L L b u ) sin cos ], (4)
R =1H
[(v b) sin2
(u R Rb + u ) sin cos ], (5)
where (+ / ) refers, in Eqs. (4) and (5) and in the
followingones, to the right (+ ) and left ( ) distributed stays
withrespect to the longitudinal girder geometric axis. Similarly,
forthe left and right pylon anchor stays, the incremental
axialdeformations are described as
L0 =1H
[(u L L b u ) sin 0 cos 0] , (6)
R0 =1H
[(u R Rb + u ) sin 0 cos 0] , (7)
where 0 is the girder/anchor stay orientation angle ( Fig.
1).The external loads evolve at constant speed from left to
right
along the bridge development. A perfect connection between
-
8/7/2019 bridge under moving load
5/18
1164 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
the girder and the moving system is assumed. Interactionforces
produced by girder prole roughness and friction aresupposed to
generate negligible effects with respect to theglobal bridge
vibration. This assumption has been veriedin the context of long
span cable-supported bridge, whereroughness effects have been
considered as negligible [19]. As a
result, the moving system has the same vertical displacementsas
the girder. Nevertheless, non-standard contributions arisingfrom
Coriolis and centripetal inertial forces, produced by thecoupling
behaviour between the moving system and bridgedeformations, have
been taken into account. With respect to axed reference system, the
velocity and acceleration functionsof the moving system are
evaluated consistently with a Euleriandescription of the moving
loads as
v =v t
+v x
c, v = 2v t 2
+2v
x t 2c +
2v x2
c2 ,
with c = x t
. (8)
The moving loads are consistent with a train systemtypology,
modelled by a sequence of lumped and distributedmasses,
representative of both bogie components and vehiclebodies. However,
for long span bridges, the internal bogiespacing for an elementary
vehicle is, usually, small incomparison with the whole bridge
length. Moreover, within thesame approximation level, the
locomotive, even if it is muchheavier than the carriage, is
distributed on a length, which isassumed, in this context, to be
smaller than the whole lengthof the train. As a result, the moving
system is supposed to bedescribed by equivalent uniformly
distributed loads and massesacting on the girder prole. However,
improvements to themoving load distribution can be easily provided
just modifyingEqs. (9)(12) and introducing a piecewise constant
function todescribe carriages and locomotive loads.
With respect to a moving reference system, x1 , from theleft end
of the bridge, the mass and loading functions duringthe external
loading advance can be written by the followingexpressions,
respectively:
= H x1 + L p ct H (ct x1) , (9)
f = pH x1 + L p ct H (ct x1) , (10)
where x1 = x + ( L / 2 + l ) , (, p) are the vehicle body
mass and loading forces per unit length and H (
) is theHeaviside function. Moreover, the moving system is
assumedto be eccentrically located with respect to the bridge half
width,and, consequently, distributed moment and rotatory
inertialfunctions are introduced to properly describe the external
loadsas
0 = 0 H x1 + L p ct H (ct x1) , (11)
m = p eH x1 + L p ct H (ct x1) , (12)
where 0 represents the torsional distributed polar massmoment
produced by the external loading and e is theeccentricity of the
moving loads with respect to the cross
sectional geometric axes. An energy approach based on the
Hamilton principle is utilized to derive the dynamic
equilibriumequations. In particular, it is assumed that the damping
energyis practically negligible. This hypotheses is quite veried
inthe context of long span bridges, where it has been provedthat
the bridge damping effects tend to decrease as spanlength increases
[ 20,21]. Detailed results about the inuence of
damping effects on the dynamic amplication factors (DAFs)have
been presented in [9], from which it transpires that theassumption
of an undamped bridge system leads to greaterDAFs. It is well known
that the Hamilton principle can beexpressed for a conservative
system and a generic time intervalas
t 2t 1 ( T V ) dt = 0 (13)where T and V are the kinetic and the
potential energyof the whole dynamic system, respectively, and t 1
and t 2dene the observation period. Therefore, with respect to
these
kinematic elds, the kinetic energy functional of the
combinedbridgemoving-load system may now be formulated as
T =12 L L v2 + u 2 dx + 12 L L 02dx+
12
I p0 2L +
2D +
12
M p u2L + u2D
+12 L L v2 + u2 dx + 12 L L 02dx ,
with L = l + L / 2. (14)
In particular, (, 0) and ( , 0) are the mass functions and
polar inertial moments per unit length for both moving loadsand
girder, respectively. Moreover, M p is the equivalent lumpedmass
which refers to horizontal top pylon displacement, b is thebridge
semi-width and I p0 is the pylon polar mass moment forboth left and
right pylons, with I p0 = b
2 M p .The total potential energy of the system, using a
small
displacements formulation, can be written as
V =12 L L E I v 2 + E Au 2 dx + 12 L L G J t 2dx+
12
0
L
E s As H sin
2L dx +12
L
0
E s As H sin
2Rdx
+12
E s0 As0 2L0 +
2R0
+12
K p0 2L +
2D + K
p u 2L + u2D
L L ( f v + m ) dx+
12 L L v x + L2 + x L2 v2dx (15)
where ( E I , E A, G J t ) are the exural, axial and torsional
girderstiffness and E s As , E
s0 As0 are the axial stiffnesses of a
generic stay or the anchor cables. Moreover, K p0 , K p are
the
-
8/7/2019 bridge under moving load
6/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1165
torsional and exural top pylon stiffness and ( ) is the
Diracdelta function. In particular, the last term on the right-hand
sideof Eq. (15) denotes a penalty functional, with v
representingthe penalty parameter, introduced to penalize girder
verticaldisplacements and, consequently, to reproduce the
connectionbetween the girder and the pylons correctly.
By integrating by parts the rst variation of the kineticenergy
functional of the combined bridge/moving loads systemand assuming
that the virtual displacements vanish at both thebeginning and end
of the actual varied path, the followingexpression is derived:
t 1t 1 T dt = t 2t 1 L L [ ( vv + uu ) + 0 ] dxdt t 2t 1 I p0 L
L + R R dt
t 2
t 1
M p ( u L u L + u Ru R ) dt
t 2t 1 L L 0 ( ) dxdt t 2t 1 L L 0 dxdt t 2t 1 L L (vv + uu )
dxdt t 2t 1 L L ( vv + uu ) dxdt . (16)
It is worth noting that in Eq. (16), the last two terms onthe
right-hand side denote the kinetic energy contributionsproduced by
the external moving mass, in which thetime derivative for vertical
displacement has been assumedconsistently with Eq. (8)). As a
consequence, non-standardterms due to both Coriolis and centripetal
forces are introducedin the kinetic functional, which are strictly
connected with theinteraction behaviour between the bridge
deformations and themoving system. Moreover, the time dependence of
the movingmass determines additional contributions to the inertial
forces,which are, basically, produced by an unsteady distribution
of the train/bridge system mass. Taking into account the
rstvariation of the total potential energy function, expressed
byEq. (15), the following expression is obtained:
t 1t 1 V dt = t 1t 1 L L E I v I V v E Au u G J t dx+ T v M v +
N u + M t
L L
+ 0 L (qv L v + qhL u + m L ) dx+ L0 (qv Rv + qh R u + m R )
dx+
0
Lq
u Lu
L+ m
L
Ldx
+ L0 qu R u R + m R R dx+ K p0 ( L L + R R )
+ K p (u L u L + u Ru R )
+ S0L u S0L u L + M
0L L x= L
+ S0Ru + S0Ru R + M
0R R x= L
L L f v dx L L m dx L L [( x + L / 2) + ( x L / 2)] v v v dx
dt
(17)
where
qv L( R) =E S ASH
v sin3 u L( R) (+ )u sin2 cos ,
qhL ( R) = E S AS
H ( )v sin2 cos
( ) u L( R) u cos2 sin ,
quL =E S ASH
v sin2 cos + (u L u ) cos2 sin ,
qu R =E S ASH
v sin2 cos + (u R + u ) cos2 sin ,
m L( R) =E S ASb
2
H sin3 L( R) cos sin2 ,
m L( R) =E S ASb
2
H sin2 cos + L( R) cos2 sin .
(18)
S0L ( R) =E s0 As0
H u (+ )u L( R) cos2 0 sin 0,
M 0L ( R) =E s0 As0b
2
H L ( R) cos2 0 sin 0.
(19)
It is worth noting that Eqs. (18) and (19) correspond
todistributed internal forcesdue to cable system/girder
interactionand concentrated forces and moments applied to the
leftand right girder cross section ends due to the anchor
stays,respectively (Fig. 2). Moreover, in Eq. (18), the
angularparameter , as depicted in Fig. 1, depends on the
longitudinal
coordinate x and the geometrical bridge lengths (l , H , L)
.Assuming thebridge scheme reported in Fig. 1 , the
boundaryconditions at the left and right girder cross section ends
requirenull values for vertical displacements, bending
moments,torsional rotations and specied horizontal axial forces, as
inthe following equations:
= 0, v = 0, v = 0 at x = L ;
E Au L + S0L = 0, E Au L S0R = 0. (20)
The dynamic equilibrium equations can be obtained inexplicit
form by means of the variation statement of theHamilton principles.
In particular, by substituting Eqs. (16)
and (17) into Eq. (13) and taking into account the boundary
-
8/7/2019 bridge under moving load
7/18
1166 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
Fig. 2. Dynamic interaction forces between bridge
components.
conditions, the following dynamic equilibrium equations
arederived:Girder
v + E I v I V + H (x) qv R + H ( x) qv L + v
+ v + 2cv + c2v
f (x + L / 2) + (x L / 2) v v = 0, (21)
u E Au + H ( x) qh R + H ( x) qhL + u + u = 0, (22) 0 G J t + H
(x) m R + H ( x) m L + 0
+ 0 m = 0. (23)
Left top pylon
S0L 0 L quL dx K P u L + M p u L = 0, L x 0,(24)
I p0 L + K p0 L + 0 L m L dx + M 0L = 0, L x 0.
(25)
Right top pylon
S0R + L0 qu R dx + K P u R + M p u R = 0, 0 x L(26)
I p0 R + K p0 R + L0 m Rdx + M 0R = 0, 0 x L .
(27)
A synoptic representation of both internal and externalforces
has been proposed in Fig. 2, and, as an alternative tothe
variational approach, the governing equations can be easily
derived consistently with a local approach taking into
account
the equilibrium conditions for both internal and external
forces.In order to develop a generalized formulation, the
dynamicequilibrium equations have been proposed in
dimensionlessform, introducing the following parameters, related to
bothbridge and moving load characteristics:
Girder
F =4 I g
H 3g
1/ 4, =
C t g
Eb2
Hg
1/ 2,
A =A gHg
, =
, 0 = 0
b2.
(28)
Pylon, cable system
P =M P H
, p =K p g
Eg, a =
2 H 2 E 12 3g
,
a = a1 + 2 2
.
(29)
Moving loads
p = p gEg
, e = eb
, = c gEgH
1/ 2,
= t Eg
H g
1/ 2.
(30)
Bridge kinematic
V =vH
, U =uH
, U R =u RH
, U L =u LH
. (31)
In particular, ( F , A, ) are the relative bending, axialand
torsional stiffness ratios between the girder and the cablesystem,
respectively. Moreover, (a ) identies a bridge size
parameter strictly connected with the deformability of the
cable
-
8/7/2019 bridge under moving load
8/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1167
system caused by the Dischinger effect and p , P dene
theinertial and stiffness properties for both right and left
pylons.
The moving load characteristics are reported in Eq. (30),in
which ( p , e) describe the dimensionless applied loads
andeccentricity with respect to the girder cross sectional
geometricaxis, whereas (, 0) correspond to the mass and polar
mass
moment ratio between the external loads and the girder.
Finally,(,) dene the dimensionless moving load speed and thetime
variables. Adopting the following notation for spatial andtime
derivatives, f = f X , f =
f , with X =
xH , the
dynamic equilibrium equations are now presented in termsof the
normalized kinematic variables, dimensionless bridgeand moving
system parameters, by means of the followingexpressions:Girder
4F 4
V I V + V + V
1 H 1 (U L U ) + H 2 (U R + U ) p f 1
+
f 2 V + f 1 V + 2 V + 2V
+ V ( X + L / 2H ) + ( X L / 2H ) V = 0, (32)
AU U H 1 (1V + 2(U U L ))
+ H 2 ( 1V + 2(U + U R))
f 2U f 1U = 0, (33)
0 + 1 H 1 L + H 2 R
+H b
p f 1e 0
f 2 0 f 1 = 0. (34)
Left pylon
0 L/ H [ 1V 2 (U U L )] d X + pU L + P U L ( U U L ) = 0,
(35)
p L + p + L + 0 L / H (1 2 L ) dX = 0. (36)Right pylon
L/ H 0 [1V 2 (U + U R)] d X + pU R + P U R+ (U + U R) = 0,
(37)
p R + p + R + L/ H 0 (1 2 R ) dX = 0, (38)with H 1 = H ( X ) , H
2 = H ( X ) , =
E S0 A0E
ggH sin 0
cos2 0 , V = v gEg , whereas the functions ( f 1 , f 2, , 1,2)
,
for the sake of brevity, are reported in Appendix A .
Moreover,details of the derivation of dynamic equilibrium equations
canbe found in Appendix B , in which, for conciseness, only Eq.(32)
has been discussed.
The dynamic equilibrium equations introduce an
integro-differential boundary value system. Moreover, in Eqs.
(35)
(38), the kinematic variables, related to both left and
right
pylons, depend only on the time variables. Therefore, in orderto
utilize standard numerical methods to solve PDE systemequations,
the integro-differential equations, given by Eqs.(32)(38) , are
converted into a purely differential form. Theequivalence between
the original and the modied systemsis guaranteed by the use of the
penalty method, by which
it is possible to convert the equilibrium conditions,
fromintegral to local form. In particular, the pylon
kinematics(namely U L , U R R , L ) are assumed, ctitiously, to
dependonboth time and space variables. However, they are
constrainedover the spatial domain by means of penalty
functionals,involving two penalty parameters, i.e. K U , K .
Moreover,distributed and lumped forces arising from the cable
systemand pylons have been taken into account, utilizing
Heavisideand delta Dirac functions, respectively. As a result, the
integro-differential dynamic equilibrium equations, i.e. Eqs.
(35)(38) ,are transformed into the following relationships:
H 1 [ 1V 2 (U U L )] + X +L
2H pU L + P U L + K U U L = 0, (39)
H 1 (1 2 L ) + X +L
2H p L + p L
+ K L = 0, (40)
H 2 [1V 2 (U + U R )] + X L
2H
pU R + P U R + K U U R = 0, (41)
H 2 (1 2 R ) + X L
2H p R p R
+ K = 0. (42)
By comparing the sets of Eqs. (39)(42) and Eqs. (35)(38)
,related to the differential and the integro-differential
forms,respectively, it is easy to recognize that the internal
forcesreferred to the anchor stays have not yet been introduced.
Inparticular, the transformation of equilibrium equations relatedto
the pylons, from global into local form, leads to consideringthe
concentrated forces and moments arising from anchor stayaxial
forces as boundary conditions, by means of the
followingequations:
U L
( L / H , ) = 1
K U (U U
L) , U
L( L / H , ) = 0
U R( L / H , ) =1
K U (U + U R ) , U R ( L / H , ) = 0
L ( L / H , ) =1
K , L ( L / H , ) = 0,
R ( L / H , ) =1
K , R ( L / H , ) = 0.
(43)
Finally, the following relationships summarize the remain-ing
boundary conditions, i.e. Eq. (20), which impose that thevertical
and torsional displacements vanish at the left and rightand bridge
cross section ends, natural conditions for girder ax-
ial displacements and homogeneous relationships with respect
-
8/7/2019 bridge under moving load
9/18
1168 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
Fig. 3. Moving load problem for A shaped tower typology: bridge
kinematics and internal force distribution.
to the time variable:U ( L / H , ) =
A
(U U L ) ,
U ( L / H , ) = A
(U + U R) ,
V ( L / H , ) = 0, V ( L/ H , ) = 0,
V ( L / H , ) = 0, V ( L / H , ) = 0,
( L / H , ) = 0, ( L / H , ) = 0,( X , 0) = 0, ( X , 0) = 0,
U ( X , 0) = 0, U ( X , 0) = 0,
V ( X , 0) = 0, V ( X , 0) = 0,
i ( X , 0) = 0, i ( X , 0) = 0, U i ( X , 0) = 0,
U i ( X , 0) = 0 i = R , L .
(44)
From a numerical point of view the penalty stiffnessparameters,
V , K U , K , are assumed to be sufciently highto impose proper
constraint conditions, but not, exceedingly,to introduce numerical
instabilities in the computation. For anumerical evaluation of the
stiffness values, from the Authorsexperience of applying the model
over different structures, arange between [10 5106] is
suggested.
Long span bridges are frequently designed with A shapedpylon
typologies, which are able to efciently reduce bothtorsional and
exural deformations produced by eccentric ortransverse loading. In
order to analyse such a bridge typology,the previous formulation
still applies, but slight modicationsto the main governing
equations need to be performed. Asa matter of fact, the dynamic
equilibrium equations withrespect to exural deformation in the
plane xy are, basically,the same. In contrast, the top pylon
kinematic is governedby longitudinal displacements only, because
both out-of-plane(xz) and torsional (with respect to y) kinematic
parametersare assumed to be meaningless. Moreover, the
distributedstays are now inclined with respect to the vertical
direction,i.e. the y axis, and determine a coupling behaviour
between
out-of-plane exural and torsional deformations. As depicted
in Fig. 3, introducing the misalignment angles, i.e. , ,which
describe the orientation of a generic stay element withrespect to
vertical and longitudinal directions, respectively,and transverse
displacement w regarding the xy plane, theinteraction forces
between cable system and girder assume thefollowing
expressions:
qv L ( R) =E S ASH
v sin3
u L( R) (+ )u sin2 cos cos ,
qhL ( R) =E S ASH
( )v sin2 cos cos
u L ( R) u cos2 sin cos2 ,
quL ( R) =E S ASH
v sin2 cos cos
+ u L ( R) (+ )u cos2 sin cos2 ,
m L( R) =E S ASb
2
H sin3 +
w x
cos sin2 cos
wb
sin2 cos sin
S0L( R) =E s0 As0
H u (+ )u L ( R) cos2 0 sin 0 cos ,
(45)
qw L( R) =E S ASH
sin cos sin
b sin (+ )w x
b cos cos w cos sin ,
mw L ( R) = (+ )E S ASb
H sin cos cos
b sin (+ )w x
b cos cos (+ )w cos sin ,
(46)
where (qi , m , S0) with ( i = v, h , u ) , are the internal
forces
produced by the cable system girder and pylons. Moreover,
-
8/7/2019 bridge under moving load
10/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1169
Table 1Comparison of maximum normalized torsional rotation in
terms of the relative torsional stiffness ( ) and bridge size
parameter ( a ) between simplied (S) andgeneral (G)
formulations
a Model = 0.05 = 0.1 = 0.15 = 0.2 = 0.25
0.05 G 115.39 93.21 74.85 61.69 53.08S 115.89 93.57 75.06 62.05
53.50
0.10 G 184.65 139.79 107.17 86.44 77.08S 183.78 137.35 105.84
86.82 77.22
0.15 G 237.77 174.45 133.39 111.17 237.77S 237.84 174.37 133.29
111.14 237.84
0.20 G 272.12 209.57 164.16 135.73 272.12S 271.76 210.71 164.20
135.97 271.76
0.25 G 338.72 250.96 195.65 160.61 338.72S 332.65 246.57 191.63
157.65 332.65
0.30 G 381.34 283.29 218.71 176.48 160.61S 377.06 280.07 217.45
176.61 151.20
Table 2Comparisons of maximum normalized torsional rotation in
terms of speed parameter ( ) and relative torsional stiffness ( )
between simplied (S) and general (G)formulations
Model a = 0.1 a = 0.2 = 0.1 = 0.15 = 0.2 = 0.1 = 0.15 = 0.2
0.05 G 117.99 95.31 83.67 191.55 152.52 128.74S 117.31 94.97
83.66 188.85 150.41 129.68
0.07 G 123.33 99.15 84.60 190.29 152.44 131.02S 122.80 98.82
84.49 191.65 153.11 131.01
0.09 G 127.93 101.54 85.06 209.95 164.71 136.03S 127.98 101.82
85.38 208.57 163.62 135.53
0.11 G 139.56 106.54 88.09 223.88 172.00 140.75S 138.49 106.20
87.78 222.20 170.95 139.88
0.13 G 142.69 112.63 92.10 238.69 181.20 144.29S 143.75 113.48
92.64 237.56 181.12 145.11
qw L ( R) and mw L ( R) represent distributed forces and
momentsin the (xz) plane (Fig. 3), produced by the coupling
behaviourby torsional and exural deformations, arising from the
inclinedstays of the A shaped tower typology.
The dynamic equilibrium equations, for A shaped bridgetypology,
can be easily derived, starting from Eqs. (21)(26) and making use
of Eq. (45) to describe the interactionforces between the cable
system and the girder. Moreover, anadditional equilibrium equation
is required due to the presence
of the transverse displacement, w . In particular, as reported
inFig. 3, the following expression regarding exural deformationin
the xy plane is introduced:
w + E I s w I V + H (x) qs R + m s R
+ H ( x) qsL + m sL = 0. (47)
Finally, the dynamic equilibrium equations for the Ashaped tower
typology can be summarized by Eqs. (21)(26)and (47). However, in
the typical range of both geometrical,mechanical and moving load
characteristics, investigationshave been shown that for in-plane
loading conditions (loadsapplied in the xy plane), the transverse
deformations are
practically negligible and do not inuence dynamic bridge
behaviour. To this end, sensitivity analyses have been
proposedin terms of maximum normalized torsional rotation
duringmoving load application, i.e. (/ pe ) . In particular,
resultsconcerning the actual solution, namely the General
Approach(GA), derived from Eqs. (21)(26) and (47), and a
simpliedone, namely the Simplied Approach (SA), obtained assuming,a
priori, that the transverse displacements are negligible,i.e. w( x
, t ) = 0, have been compared. The following bridgeand moving load
parameters, typically utilized in practicalapplications, have been
assumed constant during the analyses:
e/ b = 0.5, p / g = 1, J w / J = 100, Lp = 750 m,
= 1, 0 = 0.5, p = 0.085. (48)
Variability with respect to dimensionless torsional
girderstiffness, , bridge size parameter, a , and moving
systemspeed, , have been investigated. The results reported
inTables 1 and 2 denote that the dynamic bridge behaviour
ispractically unaffected by the transverse exural
deformationsderiving from w displacements. The actual solution and
thesimplied ones make the same prediction, with an error of
less
than 2%.
-
8/7/2019 bridge under moving load
11/18
1170 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
The dynamic equilibrium equations for A shaped towersin the
dimensionless context are not presented here for the sakeof
brevity, but they can be easily derived by introducing
thedimensionless parameters previously dened in Eqs. (28)(31)in the
governing equations.
3. Numerical procedure
The dynamic equilibrium equation system introduces a PDEsystem
from which it is quite difcult to derive an analyticalsolution,
because a large variable number and complexities areinvolved in the
main equations. The governing equations areconverted to an
equivalent differential system of the rst order.In particular, for
any dependent variables involved with anorder higher than the rst
one, additional functions representingall lower order time
derivatives are introduced, by means of supplementary equations,
which are appended to the mainsystem. As a result, the reformulated
boundary value problemassumes the following form:
a i j ( X , ) y j + bi j ( X , ) y j = f i ( y1, y2 , y3 , . . .
, y14 , X ) ,
with i , j = 1, 14, (49)
where y = (V , V , V , V , V , U , U , U , U R , U R , U R , U L
,U L , U L ) is the vector of unknown functions or primaryvariables
and a i j , bi j are constants depending on both themoving loads
and the bridge properties. Moreover, f i representproper
transformation operators, which dene the relationshipbetween
primary variables and known quantities, in accordancewith the PDE
system given by Eqs. (32)(34) and (39)(42) .In accordance with Eqs.
(43) and (44), initial and boundaryconditions with respect to both
space and time are introducedby means of the following
equations:
B1 yi X , 0 = yi , B2 yi (0, ) = yi ,
with X = L / H , i = 1 . . . 14, (50)
where B1 , B2 are proper transformation matrices, whichguarantee
the consistency of the boundary conditions with Eq.(49), and yi ,
yi represent known quantities related to thetemporal and spatial
variables, respectively.
A numerical integration scheme has been utilized by meansof a
nite difference method, which uses a second-order centredimplicit
scheme for both time and spatial derivatives [22].The method has a
truncation error of O (( t )2( x)2) and isunconditionally stable
for all time steps. In order to capture therapid changes of the
solution during the time integration, thewhole domain has been
discretized by means of an accuratemesh point number. Moreover,
requested values, those whichdo not lie on a mesh point, have been
computed using aLagrange interpolation that uses four space
subdivisions andthree time points. The solution process is obtained
consistentlywith an error control procedure, which is able to
integratethe nonlinear equations with respect to upper bounds
errortolerances related to both time and spatial variables.
Inparticular, the spatial error estimate is obtained by
comparingthe solution to another one computed on a coarser spatial
mesh,
but assuming the same time step. This gives an estimate of
the
O (h 2) local truncation error of second order in h (where his
the mesh spacing for the spatial variable). Alternatively, thetime
error estimate is obtained by comparing the solution toanother
computed with a larger time step, but the same spatialmesh. This
gives an estimate of the O (k 2) local truncationerror of second
order in k (where k is the time step). However,
these estimates are local, so they do not account for
situationswhere a small perturbation in the solution at a time t =
t 1 canlead to a large change in the solution at a later time.
The numerical results are derived providing at rst atrial
integration time step, which is subsequently reduced bymeans of a
proper adaptive procedure in order to satisfy theconvergence
conditions. Contrarily, the spatial discretizationremains xed
during the analysis, and consequently, in orderto minimize the
integration errors, a proper mesh point numberover the bridge
structure has been adopted. In the followingresults, the spatial
domain is discretized utilizing more than10 000 subdivisions over
the whole bridge length. The initialintegration time step, which is
automatically reduced due to thetime adaptation procedure, is
assumed as at least 1 / 1000 of theobservation period dened as the
time necessary for the movingtrain to cross the bridge. On a
Pentium IV processor at 3000 Mzthe CPU time required for performing
the time history for eachcase was approximately 3 min.
4. Numerical results and parametric study
The results dene the relationship between the characteris-tics
of the bridge and applied moving loads, emphasizing theeffects
produced by the external mass on the dynamic bridgevibrations. In
particular, a parametric study is proposed, which
describes cable-stayed bridge behaviour in terms of
dimension-less variables, strictly related to both the moving loads
and thebridge characteristics. Numerical results are presented in
termsof dynamic impact factors, in order to quantify the
amplicationeffects produced by the moving loads over the static
solution(i.e. st ), by means of the following relationship:
X =max X t = 0... T
X st (51)
where T is the observation period and X is the variable
underinvestigation. The parametric study has been developed
toinvestigate the following variables:
V dynamic amplication factor of the midspan
verticaldisplacement, M dynamic amplication factor of the midspan
bending
moment, 0 dynamic amplication factor of the axial force in
the
anchor stay, dynamic amplication factor of the axial force in
the
longest central span stay. dynamic amplication factor of the
midspan girder
torsional rotation.
The bridge and moving load dimensioning is selected inaccordance
with the values utilized in practical applications
and due mainly to both structural and economical factors.
-
8/7/2019 bridge under moving load
12/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1171
Table 3Percentage errors of midspan vertical displacement and
bending momentdynamic amplication factors ( V , M ) between the
moving force model(MFM), standard acceleration (SA) and proposed
results for differentnormalized speed parameters ( )
V M Error % SA Error MFM % Error SA % Error MFM %
0.02 0.37 0.51 0.87 0.210.04 1.16 3.54 1.58 21.93
0.05 5.11 6.40 2.59 33.640.07 9.24 10.60 11.15 33.870.09 2.42
11.25 18.23 39.69
0.11 4.65 20.74 38.32 52.410.13 19.17 31.34 37.58 42.87
The dimensionless parameters related to aspect ratio,
pylonstiffness, allowable cable stress and moving load
characteristicsare assumed as equal to the following representative
values:
L / 2H = 2.5, l / H = 5/ 3,
a / E = 7200 / 2.1 106 , K p / g = 50,p / g = [ 0.5 1], 0 = [ 0
2].
(52)
In order to evaluate the inuence of both mass schematiza-tion
and moving system speed, comparisons in terms of thedynamic
amplication factors (DAFs) have been proposed inFigs. 47 . In
particular, the actual solution has been comparedwith numerical
results based on the following assumptions:
(1) Inertial description of the moving system
completelyneglected, i.e. p = 0, = 0, namely the moving forcemodel
(MFM).
(2) Inertial description of the moving system neglected
withrespect to non-standard inertial forces, i.e. p = 0, = 0,f 2 =
0, 2 V = 2V = 0, namely Standard Analysis(SA).
The proposed results do not agree with those arising from theSA,
especially at high speed of the moving system, where ithas been
shown that non-standard terms in the accelerationfunction provide
notable amplications in both kinematicand stress variables.
Moreover the comparisons between theproposed formulation and those
concerning the MFM are notin agreement in wide ranges of the speed
parameter. However,for reduced values of moving system speed, i.e.
0,the results arising from the dynamic and static solutions
arepractically coincident and, consequently, the inuence of themass
schematization becomes negligible. In order to quantifynumerically
the inuence of the inertial effects of the movingsystem, the
percentage errors between the SA and the MFM andthe proposed
formulation have been reported in Table 3 . Finally,in Figs. 4 and
5, dynamic amplication variability with respectto the speed
parameter for different intensity ratios between liveand
self-weight loads, are proposed.
In Tables 4 and 5, the inuence of the geometric ratios of the
bridge, i.e. L / l and l / H , on the DAFs is investigated atxed
speed of the moving system and relative girder stiffness,(i.e. =
0.2, = 0.10. In particular, the bridge geometry is
assumed to verify well-known design rules derived from both
Fig. 4. Midspan vertical displacement dynamic impact factor ( V
) vs normal-ized speed parameter ( ).
Fig. 5. Bending moment dynamic impact factor ( M ) vs normalized
speedparameter ( ).
structural and practical conditions, which guarantee stabilityof
the anchor stays, avoiding excessive steel quantity amountin the
cable system [1618 ]. The DAFs for both bendingmoments and
displacements generally grow for increasingratios between the
central span and the height of the pylons,because of the most
greater deformability of the structuralsystem. However, the impact
factors based on the bending
moments are quite dependent from the geometric aspect
-
8/7/2019 bridge under moving load
13/18
1172 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
Table 4Dynamic amplication factors for midspan vertical
displacement ( V ) vs geometric bridge ratios L/ l and H / L
L/ l a = 0.1 a = 0.2L/ H = 4 L/ H = 5 L/ H = 6 L/ H = 4 L/ H = 5
L/ H = 6
2.75 1.308 1.356 1.390 1.25 1.29 1.353.00 1.282 1.332 1.378 1.20
1.25 1.32
3.25 1.256 1.312 1.371 1.18 1.23 1.313.50 1.235 1.304 1.374 1.16
1.22 1.32
Table 5Dynamic amplication factors for midspan bending moment (
M ) vs geometric bridge ratios L/ l and H / L
L/ l a = 0.1 a = 0.2L/ H = 4 L/ H = 5 L/ H = 6 L/ H = 4 L/ H = 5
L/ H = 6
2.75 1.903 2.394 3.094 1.464 1.855 2.5903.00 1.664 2.280 2.908
1.431 1.727 2.407
3.25 1.674 2.090 2.390 1.722 1.652 2.3613.50 1.563 1.906 2.583
1.588 1.821 2.262
Fig. 6. Anchor stay dynamic impact factor ( 0 ) vs normalized
speedparameter ( ).
ratios than the corresponding ones for vertical
displacements.Moreover, at xed L/ H , the DAFs for vertical
displacementsare quite unaffected by the ratio between the main and
centralspans, because the cable system stiffness remains
practicallyconstant during the analyses.
The relationship between the DAFs and bridge size isinvestigated
in Figs. 8 and 9. In typical allowable rangesof the a parameter,
the DAFs, related to cinematic andstress bridge variables, are
analysed for an external movingsystem with a constant speed advance
and different loadinglengths (namely c = 120 m/ s, Lp1,2 = 500,
1000 m,M p g / K = 2.3). The comparisons are proposed toinvestigate
the effect of the external moving mass on the
dynamic bridge vibrations. In particular, the results show a
Fig. 7. Longest centre span stay dynamic impact factor ( ) vs
normalizedspeed parameter ( ).
tendency to decrease with an oscillating behaviour and somelocal
peaks in curve development. The inertial effects
produceconsiderable amplications in both the displacement and
stressvariables, especially, for low values of the bridge size
parametera . Moreover, results concerning the MFM determine
notableunderestimates in both stress and displacement DAFs.
In Figs. 10 and 11, the dynamic behaviour of the bridgeis
investigated with respect to the dimensionless parameter F , which
denes the normalized stiffness of the girder withrespect to the
cable system. In particular, the analysis hasbeen developed at a
constant speed of the moving systemand for different values of the
bridge size parameter, namely
a = (0.1, 0.2) , emphasizing the inuence of the external
-
8/7/2019 bridge under moving load
14/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1173
Fig. 8. Midspan displacement dynamic impact factor ( V ) vs
bridge sizeparameter ( a ).
Fig. 9. Bending moment dynamic impact factor ( M ) vs bridge
size parameter(a ).
moving mass description on the dynamic behaviour of thebridge.
As a matter of fact, the actual solution is comparedto the case in
which the inertial effects of the train loadshave not been
accounted for. The dynamic bridge behaviourappears to be quite
sensitive to the external mass description,and underestimates of
the dynamic impact factors are notedif the travelling mass has not
been properly evaluated. The
major amplication effects are noted for low ranges of the
Fig. 10. Midspan displacement dynamic impact factor ( V ) vs
relative girderstiffness parameter ( F ).
Fig. 11. Bending moment dynamic impact factor ( M ) vs relative
girderstiffness parameter ( F ).
F parameter, in which the bridge structure is basically
moreexible and, mainly, dominated by the cable-stayed system.In
contrast, for high values of F , corresponding to girder-dominated
bridge structures, the effects of the inertial forcesof the moving
system are notably reduced.
The dynamic bridge behaviour is analysed with respect
toeccentric loads, which involve both exural and torsional de-
formations. In particular, in order to evaluate the
amplication
-
8/7/2019 bridge under moving load
15/18
1174 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
Fig.12. Midspan torsional rotationdynamic impact factors ( ) vs
normalizedspeed parameter ( ) for HST.
Fig.13. Midspan torsional rotationdynamic impact factors ( ) vs
normalizedspeed parameter ( ) for AST.
effects produced by moving loads for bridge structures basedon
both A and H shaped towers (namely AST, HST), a sen-sitivity
analysis has been developed. The results are presentedin term of
maximum normalized torsional rotation and rela-tive DAF produced by
the moving load application, at midspangirder cross section, i.e. X
= 0.
In Figs. 12 and 13, the effects of mass distribution of
themoving system for both AST and HST is investigated in termsof
midspan torsional rotation for different values of the loadingstrip
length L p . In particular, in Fig. 12, for the HST
typology,dynamic amplication displays a tendency to grow
especiallyfor reduced ratios of loading application length and
central
bridge span. Moreover, the inertial forces of the moving
system
Fig. 14. Midspan torsional rotation dynamic impact factors ( )
vs relativegirder stiffness ( ) parameter for AST-HST.
Fig. 15. Maximum normalized displacement () vs relative girder
stiffness( ) parameter for AST-HST.
determine an intensication of the DAFs. In contrast, in Fig.
13,the AST denotes a smaller dependence on the loading striplength
and the moving mass schematization. This behaviourcan be explained
due to the fact that the AST typologies show,generally, greater
stiffness with respect to the HST ones, whichstrongly reduce
dynamic amplications, and as a result theeffects of the moving mass
becomes negligible.
In Figs. 14 and 15, sensitivity analyses of DAFs andmaximum
normalized torsional rotation, i.e. and = / perespectively, with
respect to girder torsional stiffness parameter,
, are proposed. The comparisons reported in Fig. 14, denote
-
8/7/2019 bridge under moving load
16/18
-
8/7/2019 bridge under moving load
17/18
1176 D. Bruno et al. / Engineering Structures 30 (2008)
11601177
Appendix A
In order to simplify the presentation of the dynamicequilibrium
equations in dimensionless formulation, thefollowing relationships
have been utilized:
f 1 = H ( X 1) H X 1 + L pH , (A.1)
f 2 = ( X 1) H X 1 +L pH
X 1 +L pH
H ( X 1) , (A.2)
( X )
=
11 + a X 2
11 + X 2
LH
X 0,
1
1 + a L2H X 2
1
1 + L2H X 2 , 0 X
LH
,(A.3)
1 ( X )
=
11 + a X 2
X 1 + X 2
, LH
X 0,
1
1 + a L2H X 2
L2H X
1 + L2H X 2 , 0 X
LH
,(A.4)
2 ( X )
=
11 + a X 2
X 2
1 + X 2,
LH
X 0,
1
1 + a L2H X 2
L2H X
2
1 + L2H X 2 , 0 X
LH
,(A.5)
with X 1 = x1/ H .
Appendix B
Starting from Eqs. (28)(31) , the following expressions canbe
determined:
v t
= H V
t
= H V Eg
H g
1/ 2,
2v t 2
= H 2V 2
Eg H g
,
(B.1)
v x
= H V X
X x
= V , 2v x2
=1H
2V X 2
=1H
V . . .
4v x4
=1
H 34V X 4
=1
H 3V I V
(B.2)
2v t x
= V Eg
H g
1/ 2, c =
EgH g
1/ 2. (B.3)
Moreover, in view of Eqs. (B.1) and (B.3) and Eqs.(28)(31) , the
interaction forces between the cable systemand the girder (qv L ,
qv R) and the mass function of themoving system ( ) can be
expressed by the following
relationships:
qv L =E S ASH
v sin3 (u L u ) sin2 cos
=Eg g
(V (U L U ) 1) (B.4)
qv R =E S ASH
v sin3 (u R + u ) sin2 cos
= Eg g
(V (U L + U ) 1) (B.5)
= H x1 + L p ct H (ct x1)
= H X 1 +L pH
H ( X 1) (B.6)
=Eg
H g
1/ 2
X 1 +L pH
H ( X 1)
H X 1 +L pH
( X 1) . (B.7)
By substituting Eqs. (B.4)(B.7) in Eq. (21), and taking
intoaccount Eqs. (B.1)(B.3) , the following equation is
obtained:
2V 2
g I g H 3
V I V H ( X ) ( V (U L + U ) 1)
H ( X ) ( V (U L U ) 1)
X 1 +
L pH
H ( X 1)
H X 1 +L pH
( X 1) V
H X 1 +
L pH
H ( X 1)
2V 2 + 2 V +
2V + p f 1
+ ( X + L / 2H ) + ( x L / 2H ) v gEg
V = 0,
(B.8)
and taking into account Eqs. (28)(31) and Eqs. (A.1) and(A.2) ,
Eq. (32) is nally determined.
References
[1] Fryba L. Vibration of solids and structures under moving
loads. London:Thomas Telford; 1999.
[2] Timoshenko SP, Young DH. Theory of structures. New York:
McGraw-Hill; 1965.
[3] Yang YB, Liao SS, Lin BH. Impact formulas for vehicles
moving oversimple and continuous beams. J Struct Eng
1995;121(11):164450.
[4] Lei X, Noda NA. Analyses of dynamic response of vehicle and
track coupling system with random irregularity of track vertical
prole. J SoundVibration 2002;258(1):14765.
[5] Roeder CW, Barth KE, Bergman A. Effect of live-load
deections on steelbridge performance. J Bridge Eng
2004;9(3):25967.
[6] Warburton GB. The dynamical behavior of structures. Oxford:
Pergamon;1976.
[7] Wiriyachai A, Chu KH, Garg VK. Bridge impact due to wheel
and track irregularities. J Eng Mech Div 1982;108:64865.
[8] Au FTK, Wang JJ, Cheung YK. Impact study of cable-stayed
bridge underrailway trafc using various models. J Sound Vibration
2001;240(3):44765.
[9] Au FTK, Wang JJ, Cheung YK. Impact study of cable-stayed
railway
bridges with random rail irregularities. Eng Struct
2001;24(5):52941.
-
8/7/2019 bridge under moving load
18/18
D. Bruno et al. / Engineering Structures 30 (2008) 11601177
1177
[10] Yang F, Fonder GA. Dynamic response of cable-stayed bridges
undermoving loads. J Eng Mech 1998;124(7):7417.
[11] Yau JD, Yang YB. Vibration reduction for cable-stayed
traveled by high-speed trains. Finite Element Anal Design
2004;40:34159.
[12] Huang D, Wang TL. Impact analysis of cable stayed bridges.
ComputStruct 1992;43(5):897908.
[13] Meisenholder SG, Weidlinger P. Dynamic interaction aspects
of cable-stayed guide ways for high speed ground Transportation. J
Dyn Syst MeasControl ASME 1974;74-Aut-R:18092.
[14] Chatterjee PK, Datta TK, Surana CS. Vibration of
cable-stayed bridges under moving vehicles. Struct Eng Int
1994;4(2):116121.
[15] Bruno D, Leonardi A. Natural periods of long-span
cable-stayed bridges.J Bridge Eng 1997;2(3):10515.
[16] De Miranda F, Grimaldi A, Maceri F, Como M. Basic problems
in long
span cable stayed bridges. Internal Report no 25. Department of
StructuralEngineering, University of Calabria; 1979.
[17] Troitsky MS. Cable stayed bridges. London: Crosby Lockwood
Staples;1977.
[18] Gimsing NJ. Cable supported bridges: Concepts and design.
John Wiley& Sons Ltd; 1997.
[19] Xia H, Xu YL, Chan THT. Dynamic interaction of long
suspensionbridges with running trains. J Sound Vibration
2000;237(2):26380.
[20] Kawashima K, Unjoh S, Tsunomoto M. Estimation of camping
ratio of cable-stayed bridges for seismic design. J Struct Eng,
ASCE 1993;119(4):101531.
[21] Yamaguchi Hiroki, Ito Manabu. Mode-dependence of structural
dampingin cable-stayed bridges. J Wind Eng Industrial Aerodynam
1997;72(13):289300.
[22] MAPLE Maplesoft. Waterloo Maple Inc. 2006.