Embed Size (px)
Citation preview

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
1
Buckling and post buckling of cantilevered singlewalled carbon
nanotubes in bending
Matukumilli V D Prasad1 and Baidurya Bhattacharya2,*
1Advanced Technology Development Centre, Indian Institute of Technology Kharagpur 721302, India
2Department of Civil Engineering, Indian Institute of Technology Kharagpur 721302, India
* Corresponding author, e-mail: [email protected], fax: +91-3222-282254

MVD Prasad and B Bhattacharya
2
Abstract
There are various potential applications in which carbon nanotubes may be subjected to bending in a
cantilevered configuration leading to buckling which in turn may affect their electrical, electronic as
well as load bearing properties. Using atomistic simulations, we study buckling and post buckling
behavior of six singlewalled carbon nanotubes subjected to bending in cantilever loading (i.e., flexure
in addition to shear and axial compression). Starting with small kinks on the compression side
corresponding to locations of high strain energy density, ripples form on the tube wall as bending
progresses, until the tube flattens maximally at a critical location giving rise to a stable hinge that
rotates under continued bending. The critical buckling curvature, locations of initial and stable hinges,
and rotational properties of the hinge are determined. Beyond the linear elastic region, the rotational
stiffness depends on the hinge angle - dropping close to zero (at the same angle for each tube) before
beginning to rise again, reminiscent of snap-through buckling of shells, a property that can be
exploited for sensing and signal amplification applications.

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
3
1. Introduction
Carbon nanotubes (CNTs) under compression and/or bending may buckle beyond a critical load which in
turn can affect their electrical1,2, electronic3 as well as load bearing properties4. Detailed understanding of the
buckling and post buckling behavior is crucial for the realization of CNTs as structural members in
nanomaterials and nanoscale sensors. CNTs have been considered for many applications, for instance in
composites5, resonators6, nano circuit interconnections7, room temperature single-electron transistors8, high
resolution AFM tips9, flow control valves10, sensors11-13 and filters14 at the nanoscale where they may be
required to resist bending loads.
Bending tests15-19 show that CNTs are extraordinarily flexible under large strains. Beyond certain bending
angles, local buckling occurs on the compressive side of the bend, but is generally elastic and reversible2,15.
Iijima et al.16 were perhaps the first to study bending behavior of CNTs experimentally as well as
computationally. Using AFM, Wong et al.18 observed an elastic buckling of MWNTs and found that MWNTs
were two times stiffer than SiC nanorods. The formation of bends and buckles in CNTs has been reported by
Postma et al.20.
Molecular dynamics (MD) simulations, as a potential tool to probe nanoscale mechanical behaviors, have
been extensively used to investigate the buckling of CNTs under compression21,22, bending, torsion23, and
thermal loadings24. MD simulations has been utilized even to reproduce the experimental observations of the
transition phenomena from uniform elastic bending to buckling of CNTs25. It was predicted that both the
thickness and diameter of CNTs would contribute to their buckling modes, which resulted in a special “dual-
size” effect in carbon nanotube buckling behavior. However, due to limitations of length and time scales
achievable in MD simulations, continuum based shell or beam models26-30 and analytical approaches by using
molecular structural mechanics31-33 also have been employed in CNT bending studies.
Several researchers16,34-38 have found the energy vs. bending angle relation to be quadratic pre- buckling,
and to be linear post buckling via both MD based and continuum based approaches. It also has been found that
bending of CNT is reversible up to large strains16. Yakobson et al.37 observed that the buckling corresponded to
abrupt changes in the slope of energy-strain curve and derived the following relationship between critical

MVD Prasad and B Bhattacharya
4
curvature and diameter: *ϕ =0.155nm/d2, assuming that the critical local strain was the same in axial
compression and bending. A transient bending regime between the just kinked and fully buckled position of the
tube is observed by Kutana and Giapis35. This happened only for large diameter tubes (greater than 15,15). This
transient bending regime was not reproduced during unloading – the tube suddenly snapped back to an
unbuckled state. Bending hysteresis only happened in larger tubes, and that too if van der Waals forces between
walls was included. Thus van der Waals forces appear to have a crucial role in bending hysteresis.
In case of MWNTs, it was found that the initial buckling wavelength and critical buckling curvature were,
respectively, weakly dependent and independent on the thickness of the tube34. Liu et al.39 found a great
enhancement of bending stiffness with the increase of nanotube diameter and they observed a strong non-
linearity at small strains, while a nearly linear relation in load-displacement curves existed at large strains.
Multi-layer continuum shell model by incorporating van der Waals interaction between neighboring layers has
been utilized to investigate the bending stability of MWNTs27. Unlike in compression, they found unique axial
half wave numbers corresponding to critical buckling moment of different MWNTs. Chang et al.33 studied the
buckling behavior of MWNTs in compression and bending using molecular mechanics. By varying thickness of
the MWNT, they observed different buckling phenomenon in both bending and compression loadings which
gave rise to the size effects on critical buckling properties.
The local buckling instability of SWNT subjected to point loading in its flexural direction has been studied
by Wang et al.31 using molecular mechanics simulations who found sudden decrease in the stiffness of the CNT
at the onset of the local instability using the second derivation of the strain energy. Devesh et al.29 modeled
buckling of CNTs as nonlocal continua; they discussed on effect of nonlocal parameter and different boundary
conditions on buckling load.
Using both MD and finite element methods, Cao and Chen40 studied the effects of tube geometrical
parameters such as diameter, length, chirality and boundary conditions on the buckling behavior of SWNTs.
Using continuum mechanics theory, Vodenitcharova and Zhang38studied a long SWNT under pure bending with
moderate bending angles. They found that the van der Waals force facilitated the kink development and its
effect became more pronounced at large bending angles. Using MD in conjunction with continuum mechanics,
Mylvaganam et al.36 investigated the detailed deformation mechanism of a SWNT in pure bending. They found

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
5
that the nanotube buckled locally at a bending angle of 24º, forming a kink in the middle of the nanotube and as
the bending angle increased, the kink progressed along the nanotube and varied its shape in both longitudinal
and circumferential directions. They considered this kink formation as the result of rotations of planes/surfaces
about the moving and stationary hinge lines and also found that the kink deformation influenced the load
bearing capacity of the nanotube.
Relatively few studies have looked at post-buckling behavior of CNTs under compression41, torsion42 or
bending26. Chen-Li and Hui-Shen43 investigated the temperature effects on buckling and post buckling of
SWNTs under combined compression and torsion loadings, and obtained post buckling equilibrium paths.
Buckling behavior of functionally graded CNT-reinforced composites however, have been extensively studied
recently44,45. To our knowledge, the only available study on post buckling of CNTs was performed by Yao et
al.26 who modeled simply supported CNTs in pure bending with continuum shell theory based FEM. They
confirmed that the post buckling equilibrium path of SWNT is unstable.
In case of cantilever type loading, Shibutani and Ogata46 employed MD simulations and observed a
topological transition from four hexagons to two pairs of pentagons and heptagons near the fixed end zone.
Another molecular structural mechanics based approach47 utilized by Li and Chou to study CNT in cantilever
bending, found that no enhancement in load bearing capacity while using MWNT in place of SWNT of same
diameter.
Although the cantilever configuration of CNT is employed exclusively in AFM experiments, and in many
applications6,9,10 and is widely incorporated into next generation sensors13, attempts to investigate cantilever
type bending behavior of CNTs are very few46,47. Furthermore, only a few theoretical studies41,42 have
particularly addressed the post buckling behavior of CNTs. In this paper, we conduct MD simulations to study
the post buckling behavior of SWNT under cantilever loadings with focus on moment-rotation characteristics.
2. Simulation details
Atomistic simulations have been carried out in this work using an in-house FORTRAN code. The C-C
atomic interactions are described by modified Morse potential48 which has been extensively used to describe the

MVD Prasad and B Bhattacharya
6
short range interactions among carbon atoms, and has been applied, among others, to study CNT fracture under
tensile loading48, to evaluate tensile and torsional properties of CNTs49, to find strain rate dependence of
stiffness and strength of SWNTs50, to evaluate fracture toughness of zigzag SWNTs51 and to find the
randomness in strength and stiffness of SWNTs due to the presence of defects52.
The velocity Verlet integration scheme is used and a time step of 0.35 fs is used in all the simulations. The
system is maintained at a low temperature of 1K using Andersen thermostat53. Six different armchair (n,n)
SWNTs have been investigated in this work (Table 1): n varying from 5 to 10, with the aspect ratio (length, L
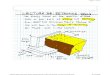
divided by diameter, d) held constant at 10 for all the six cases. Bending takes place in the x-y plane only.
Cantilever loading is carried out by fully constraining one end of the tube and displacing the other (free) end
along the x-direction with a steady increment, δ, of transverse displacement until an end displacement of L/2 is
reached as illustrated in Figure 1. The value of δ = 0.0176 Å is the same for all tubes. After each increment of
displacement the whole system is relaxed for 5000 time steps while keeping both end rings constrained in their
current positions.
3. Buckling and post-buckling behavior of cantilevered CNTs
This section is organized as follows. We start with a brief summary of key events in the cantilever bending
of (6,6) CNT. Later, we discuss in detail the evaluation of flexural rigidity using moment-curvature relation and
rotational stiffness of hinge. Finally, we investigate the effect of CNT diameter on critical curvature.
3.1. Key events in the bending process
We first summarize the key events in the bending process that are discussed later, and focus, without loss of
generality, on the (6,6) tube. The phenomena and inferences apply to all tubes studied here.
Four distinct events, marked “1 – 4” in each part of Figure 2, can be identified in the bending deformation
history of the (6,6) SWNT. Each of those events corresponds to the same time stamp in all six parts of the
figure. Event “1” corresponds to the undeformed tube at the beginning of bending. The snapshots of the tube in
longitudinal and cross-sectional views, corresponding to each of the four events, are shown in Figure 2 (a). The
cross-sectional view is taken at the stable hinge location.

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
7
Part (b) of Figure 2 displays the growth of the average strain energy of the tube with bending. Event “2” is
the first dip in the strain energy of the tube: the first kink forms on the tube surface and the initial hinge forms at
0.2L (part c). Event “2” is also the end of the linear portion of the moment curvature (part d) and moment
rotation (part e) relations. Importantly, Event “2” is the point where the stiffness of the hinge starts a precipitous
five-fold drop (part f). A few dips in the strain energy plot have not been marked in this exercise as they
correspond to kinks away from the hinge and do not contribute to hinge properties.
Event “3” corresponds to the point of smallest stiffness of the hinge, while the next Event corresponds to
the point of stable hinge formation. Beyond Event “4”, the moment curvature relation begins to rise, and the
hinge stiffness becomes constant. Both these Events (“3” and “4”) also correspond to two further releases (dips)
in the tube’s strain energy.
The behavior of the rotational stiffness between Events “2” and “4” is interesting. The softening between 2
and 3, and the hardening between 3 and 4, suggest that point 3 is one of local equilibrium. Further, this point
occurs at the same rotation of about 0.2 rad irrespective of tube diameter (as we shall see later). A graded array
of nanotubes in cantilever configuration may thus be used for sensing and signal amplification by exploiting
this property.
3.2. Formation of hinge and moment curvature relation
We now study the bending process of all six tubes in detail, starting with the strain energy (SE) versus free
end displacement, δ∆ = Σ (Figure 3). The strain energy increases in a quadratic manner with ∆ until a sudden
dip occurs indicating the initial local buckling of the CNT. This trend is qualitatively similar to that of Iijima et
al.16 and Yakobson. et al.37. This dip corresponds to the formation of a small kink on the compression side of
the tube at a location of high strain energy concentration. If bending continues, this kink can increase in size
and/or new kinks can develop to periodically release the accumulated strain energy (indicated by subsequent
dips in the SE- ∆ plot). Finally, one of these kinks becomes stable at some location, its curvature grows, and
acts as hinge for further rotation under continued bending.
To evaluate moment curvature relation, it is necessary to identify the stable hinge location. Figure 4 shows
the linear strain energy density (summed for all atoms in each ring) along the length of the (6,6) tube at various
stages of bending. The high values at the free end signifies near-field effects at the point of application of the

MVD Prasad and B Bhattacharya
8
transverse (shearing) load. The first clear peak corresponds to the formation of the first kink that occurs around
location 0.2L and ∆=0.17L. As bending progresses, not only does the curve move upward, but multiple peaks
develop and their locations tend to move giving the impression of a ripple. Figure 2(c) emphasized this dynamic
nature of the hinge formation and indicates the point around which the stable hinge forms.
Once the location of the stable hinge is determined, we study the moment curvature relationship at that
location, both before and after the formation of the hinge. In the next subsection, we investigate the rotational
stiffness of the hinge. The hinge zone is bounded by the initial and stable hinge locations identified above. To
compute the rotation and curvature at the hinge, we identify two rings at either side of the hinge zone – each at a
distance 2dh away from initial and stable hinge locations (dh =1.2Å is the equilibrium inter-ring separation) and
denote them as RL and RR, respectively.
Let ˆLn and ˆRn denote the unit normals, respectively, to these two rings. Recall that bending occurs in the x-y
plane. Let θL and θR be the angles made by the respective unit normals with the y axis. We assume that plane
cross-sections (perpendicular to the plane of bending) remain plane throughout the bending process. Thus the
rate of change of rotation of the rings with respect to distance, s, along the tube axis gives the principal
curvature of the nanotube.
At any instant, the unit normal, 1 2 3ˆˆ ˆe i e j e k+ + , to the plane of a given ring is found by determining the best
fit plane through the atoms of the ring ( ˆˆ ˆ, ,i j k being unit vectors along x, y and z, and 2 1ieΣ = ). The angle θ
made by the normal with the y direction is simply 12cos e− and the curvature at the hinge location (both before
and after the formation of the stable hinge) is computed as ( ) /h R L sϕ θ θ= − where s is the distance between RL
and RR. The moment acting at the hinge location is computed by resolving the forces on the free end ring in x
and y directions.
Figure 5 shows the moment curvature relation in all six tubes. The knee in each the curve corresponds to the
formation of the hinge. The curve stays more or less horizontal as long as the tube wall keeps flattening and
reaches the minimum separation distance. The curve then starts to rise albeit with a smaller slope, and can again
have a flat region if the hinge spreads. The initial slope of each curve gives the elastic flexural rigidity, EI. We
validated the present simulations by comparing the EI values with continuum mechanics based values (see

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
9
Table. 2). For example, the initial slope of the curve corresponds to (6,6) CNT gives the EI, as 75 nN-nm2
which is in well agreement with the continuum mechanics based value of EI of thin cylinders 72 nN-nm2.
3.3. Rotational stiffness of hinge
We now look at the moment-rotation characteristics at the hinge location both before and after the
formation of the hinge. Figure 6 shows M vs. θR for all six tubes. As in the case of moment curvature relation,
the moment rotation plot is initially linear; subsequently a relatively flat region develops indicating formation of
the hinge; following this the curve again moves upward although with a reduced slope.
The rotational stiffness of the hinge can be found from the slope of the moment – rotation plot, and is
plotted as a function of θR in Figure 7. Before the formation of any kink, the rotational stiffness is
approximately flat, indicting linear elastic behavior where stiffness properties are not dependent on the
deformed state. Beyond the domain of small deformations, the rotational stiffness begins to change significantly
with accumulated rotation. As the hinge begins to form, the stiffness suffers a precipitous drop caused by start
of flattening of the tube wall (and spread of the flattened region) until the minimum inter-wall distance is
reached. The smallest hinge stiffness is attained at a rotation of about 0.2 rad irrespective of the tube diameter.
This behaviour is reminiscent of snap-though bucking in shells. Further bending causes the compressed side of
the tube wall to come closer to each other on either side of the hinge thus increasing the stiffness once again.
3.4. Effect of tube diameter
Figure 3 shows the SE versus free end displacement for all six tubes. In all the tubes, the SE followed a
quadratic trend until initial local buckling happens. Keeping the aspect ratio common, small diameter tubes
require higher SE to bend up to and end displacement of L/2. The location of the hinge (at both initial and stable
stages) moves away from the fixed end as the CNT diameter increases (Figure 8).
Figure 5 shows the moment curvature relation in all six tubes. From the initial slope of each curve, the
elastic flexural rigidity, EI, values are listed in Table 2. These results are close to continuum mechanics based
values of flexural rigidities of thin cylinders listed in the last column of the table. Table 2 also lists the critical
bending buckling curvature, *ϕ , of each tube at the onset of buckling. Figure 9 shows the relation between *ϕ
and tube diameter, d. A quadratic relation, given by

MVD Prasad and B Bhattacharya
10
* 2/a dϕ = with 0.03168 .a nm= (1)
appears to fit the data very well. This fit is now compared with some of the available methods. Yakobson et
al.37 assumed that the critical buckling strain in bending is the same as that in compression for thin shells, and
obtained the following relation for critical curvature of SWNTs:
* 2Yakobson 2.352 / , 0.066nmt d tϕ = ⋅ = (2)
where t is the effective shell thickness of the SWNT. This relation is in good agreement with the results of
Iijima et al. 16. Cao et al 40, on the other hand, obtained two different fits for critical bending buckling curvature
using FEM and MD, respectively:
* 2Cao-FEM FEM /a dϕ = , FEM 0.1076nma = (3)
* 2Cao-MD MD /a dϕ = , MD 0.0738nma = (4)
Yao et al. 26 also reported the following relation between critical bending buckling curvature and diameter
using FEA:
* 2Yao-FEM /a dϕ = , 0.0643nma = (5)
Figure 9 compares the results from present method with those of Yakobson et al.37, Cao et al.40 and Yao et
al.26. It is seen that the present method underestimates the critical buckling curvature, which could be the
consequence of using the modified Morse Potential which may not be adequate to model deformation of the
carbon lattice in high strain regions48,49.

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
11
4. Conclusions
Buckling and post buckling behavior of singlewalled carbon nanotubes subjected to cantilever bending (i.e.,
flexure along with axial and shear forces) was studied in this paper using molecular dynamics simulations. The
results show that the strain energy increases in a quadratic manner with end displacement until the initial local
buckling occurs. The dynamics of the hinge formation is investigated using strain energy density profile along
the length of CNT. From the initial slope of moment-curvature relation we computed the elastic flexural rigidity
which found well agreeing with continuum mechanics based flexural rigidity. The critical buckling curvature
found quadratically decreasing with tube diameter. Rotational stiffness of the stable hinge is computed. Large
deformation non-linearities and a stable minimum in the hinge stiffness properties, reminiscent of snap-through
buckling, suggest that they can be exploited in sensing and signal amplification applications.
Acknowledgments
The authors acknowledge financial support from Defense Materials Research Laboratory of India through
CARS project contract no. RDR-P1-2004/DMR-275.01.
References
1 A. Hansson, M. Paulsson, and S. Stafström, Physical Review B 62, 7639 (2000). 2 T. W. Tombler, C. Zhou, L. Alexseyev, J. Kong, H. Dai, L. Liu, C. S. Jayanthi, M. Tang, and
S.-Y. Wu, Nature 405, 769-772 (2000). 3 A. A. Farajian, B. I. Yakobson, H. M. Mizuseki, and Y. Kawazoe, Phys.Rev. B 67, 205423
(2003). 4 M. S. Wang, L. M. Peng, J. Y. Wang, and Q. Chen, Advanced Functional Materials 16, 1462-
1468 (2006). 5 F. T. Fisher, R. D. Bradshaw, and L. C. Brinson, Applied Physics Letters 80, 4647-4649
(2002). 6 V. Sazonova, Y. Yaish, H. Ustunel, D. Roundy, T. A. Arias, and P. L. McEuen, Nature 431,
284-287 (2004). 7 J. F. AuBuchon, L.-H. Chen, and S. Jin, The Journal of Physical Chemistry B 109, 6044-6048
(2005).

MVD Prasad and B Bhattacharya
12
8 H. W. C. Postma, T. Teepen, Z. Yao, M. Grifoni, and C. Dekker, Science 293, 76-79 (2001). 9 S. Kuwahara, S. Akita, M. Shirakihara, T. Sugai, Y. Nakayama, and H. Shinohar, Chemical
Physics Letters 429, 581-585 (2006). 10 M. Grujicic, G. Cao, B. Pandurangan, and W. N. Roy, Materials Science and Engineering B
117, 53-61 (2005). 11 S. Ghosh, A. K. Sood, and N. Kumar, Science 299, 1042-1044 (2003). 12 J. Kong, N. R. Franklin, C. Zhou, M. G. Chapline, S. Peng, K. Cho, and H. Dai, Science 287,
622-625 (2000). 13 E. H. Feng and R. E. Jones, Physical Review B 83, 195412 (2011). 14 Z. ZhongQiang, Z. HongWu, Z. YongGang, W. Lei, and W. JinBao, Physical Review B
(Condensed Matter and Materials Physics) 78, 035439 (2008). 15 M. R. Falvo, G. J. Clary, R. M. T. II, V. Chi, F. P. B. Jr, S. Washburn, and R. Superfine,
Nature 389, 582 (1997). 16 S. Iijima, C. Brabec, A. Maiti, and J. Bernholc, J. Chem. Phys. 104, 2089 (1996). 17 O. Lourie, D. M.Cox, and H. D.Wagner, Phys. Rev. Lett. 81, 1638 (1998). 18 E. W. Wong, P. E. Sheehan, and C. M. Lieber, Science 277, 1971 (1997). 19 H. Jackman, P. Krakhmalev, and K. Svensson, Journal of Applied Physics 117, 084318 (2015). 20 H. W. C. Postma, A. Sellmeijer, and C. Dekker, Advanced Materials 12, 1299-1302 (2000). 21 K. M. Liew, C. H. Wong, X. Q. He, M. J. Tan, and S. A. Meguid, Phy.Rev.B 69, 115429
(2004). 22 I. L. Chang and C. Bing-Chen, Journal of Applied Physics 106, 114313 (2009). 23 C. Tienchong, Applied Physics Letters 90, 201910 (2007). 24 H. Jung-Chang, L. Haw-Long, and C. Win-Jin, Journal of Applied Physics 105, 103512
(2009). 25 X. Duan, C. Tang, J. Zhang, W. Guo, and Z. Liu, Nano Lett. 7, 143 (2007). 26 X. Yao, Q. Han, and H. Xin, Computational Materials Science 43, 579-590 (2008). 27 X. Wang and H. K. Yang, Physical Review B (Condensed Matter and Materials Physics) 73,
085409 (2006). 28 Y. Y. Zhang, C. M. Wang, W. H. Duan, Y. Xiang, and Z. Zong, Nanotechnology 20, 395707
(2009). 29 K. Devesh, H. Christian, and M. W. Anthony, Journal of Applied Physics 103, 073521 (2008). 30 X. Guo, A. Y. T. Leung, X. Q. He, H. Jiang, and Y. Huang, Composites: Part B 39, 202–208
(2008). 31 Q. Wang, K. M. Liew, X. Q. He, and Y. Xiang, Appl. Phys. Lett. 91, 093128 (2007). 32 N. Hu, K. Nunoya, D. Pan, T. Okabe, and H. Fukunaga, International Journal of Solids and
Structures 44, 6535-6550 (2007). 33 T. Chang, W. Guo, and X. Guo, Physical Review B 72, 064101 (2005). 34 T. Chang and J. Hou, Journal of Applied Physics 100, 114327 (2006). 35 A. Kutana and K. P. Giapis, Phys. Rev. Lett. 97, 245501 (2006). 36 K. Mylvaganam, T. Vodenitcharova, and L. C. Zhang, J. Mater. Sci. 41, 3341–3347 (2006). 37 B. I. Yakobson, C. J. Brabec, and J. Bernholc, Phys. Rev. Lett. 76, 2511-2514 (1996). 38 T. Vodenitcharova and L. C. Zhang, Phys. Rev. B. 69, 115410 (2004). 39 P. Liu, Y. Zhang, C. Lu, and K. Y. Lam, J. Phys. D: Appl. Phys. 37, 2358–2363 (2004). 40 G. Cao and X. Chen, Phy.Rev.B 73, 155435 (2006). 41 A. Y. T. Leung, X. Guo, X. Q. He, H. Jiang, and Y. Huang, Journal of Applied Physics 99,
124308 (2006). 42 X. Yao and Q. Han, European Journal of Mechanics - A/Solids 27, 796-807 (2008). 43 Z. Chen-Li and S. Hui-Shen, Physical Review B (Condensed Matter and Materials Physics) 75,
045408 (2007).

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
13
44 K. M. Liew, Z. X. Lei, J. L. Yu, and L. W. Zhang, Computer Methods in Applied Mechanics and Engineering 268, 1-17 (2014).
45 K. Mayandi and P. Jeyaraj, Proceedings of the Institution of Mechanical Engineers, Part L: Journal of Materials Design and Applications (2013).
46 Y. Shibutani and S. Ogata, Modelling Simul. Mater. Sci. Eng. 12, 599-610 (2004). 47 C. Li and T.-W. Chou, Mechanics of Materials 36, 1047-1055 (2004). 48 T. Belytschko, S. P. Xiao, G. C. Schatz, and R. S. Ruoff, Physical Review B 65, 235430
(2002). 49 J. R. Xiao, B. A. Gama, and J. J. W. Gillespie, Int J Solids and Structures 42, 3075-3092
(2005). 50 Q. Lu and B. Bhattacharya, Engineering Fracture Mechanics 72, 2037-2071 (2005). 51 Q. Lu and B. Bhattacharya, Nanotechnology 17, 1323-1332 (2006). 52 Q. Lu and B. Bhattacharya, Nanotechnology 16, 555-566 (2005). 53 C. A. Hans, The Journal of Chemical Physics 72, 2384-2393 (1980). 54 Y. Nan and L. Vincenzo, Journal of Applied Physics 84, 1939-1943 (1998).

MVD Prasad and B Bhattacharya
14
TABLE 1: SWNTs used in this study
SWNT diameter,
d (Å)
length,
L (Å)
no of atoms
(5,5) 6.79 67.6 560
(6,6) 8.14 82.4 816
(7,7) 9.5 94.6 1092
(8,8) 10.86 109.4 1440
(9,9) 12.22 121.7 1800
(10,10) 13.57 135.6 2240

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
15
TABLE 2. Critical curvature and flexural rigidity values
for different SWNTs
SWNT *ϕ (nm-1) EI from M-φ
plot
(nN-nm2)
Theoretical
EI#
(nN-nm2)
10,10 0.085 31 333
9,9 0.053 221 243
8,8 0.035 159 171
7,7 0. 24 124 114
6,6 0.017 75 72
5,5 0.011 33 41
# 3I r tπ= , E = 1 TPa54, t = 0.34 nm16

MVD Prasad and B Bhattacharya
16
Figure. 1. Configurations of (6,6) SWNT in bending

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
17
Figure 2. (a) Snapshots of the (6,6) SWNT at various stages of bending (b) strain energy (c) location of hinge (d)
moment vs. curvature (e) moment vs. rotation (f) rotational stiffness vs. rotation

MVD Prasad and B Bhattacharya
18
Figure 3. Strain energy trend as a function of end
displacement under cantilever loading

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
19
Figure 4. Strain energy density along the length of the
(6,6) tube at various end displacements ∆

MVD Prasad and B Bhattacharya
20
Figure 5. Moment-curvature for different sized CNTs

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
21
Figure 6. Moment-rotation characteristics at hinge
location

MVD Prasad and B Bhattacharya
22
Figure 7. Rotational stiffness of hinge as a function of
the angle of rotation

International Journal of Nanoscience, World Scientific, 14, 1550019 (2015)
23
Figure 8. Normalized initial and stable hinge location
from fixed end as a function of tube diameter

MVD Prasad and B Bhattacharya
24
Figure 9. Critical bending buckling curvature vs.
diameter of SWNT