Embed Size (px)
Citation preview
ÉVALUATION 1
1. Si le glissement d'une roue augmente, l'adhérence ?
2. Le blocage des roues avant provoque ?
3. Pour quelle valeur de glissement, obtient-on le meilleur compromis force de freinage / stabilité ?
NOM DU STAGIAIRE : SEMAINE :
GROUPE : FORMATEUR :
DR : CFR :
NOTE DÉBUT : NOTE FIN :
Début Fin
■A :Diminue. ❏ ❏
■B :Augmente. ❏ ❏
■C :Reste identique. ❏ ❏
Début Fin
■A :La réduction des distances de freinage. ❏ ❏
■B :Le meilleur compromis force de freinage / stabilité. ❏ ❏
■C :La perte du pouvoir directionnel du véhicule. ❏ ❏
Début Fin
■A :20 %. ❏ ❏
■B :10 %. ❏ ❏
■C :30 %. ❏ ❏
ÉVALUATION DE L’ACQUISÉVALUATION DE L’ACQUIS
Systèmes électroniques de freinage
2 ÉVALUATION
4. Quel est le but du système ABS ?
5. Sur quel type de système peut on trouver la fonction AFU ?
6/ Combien de familles de capteur de vitesse de roue sont utilisées ?
7. Combien d'électrovannes y a-t-il dans un bloc ABS de type BOSCH 8.0 ?
8. Quelle est ou quelles sont la ou les éléctrovannes commandées lors d'une régulation ABS (sur une roue) pendant la phase « maintien de pression ? »
Début Fin
■A :Réduire les distances d'arrêt. ❏ ❏
■B :Conserver le pouvoir directionnel du véhicule. ❏ ❏
■C :Diminuer l'usure des pneumatiques. ❏ ❏
Début Fin
■A :Uniquement les véhicules équipés de l'ABS. ❏ ❏
■B :Uniquement les véhicules équipés de l'ESP. ❏ ❏
■C :Sur les véhicules équipés de l'ABS et de l'ESP. ❏ ❏
■D :Sur tous les véhicules. ❏ ❏
Début Fin
■A :2. ❏ ❏
■B :1. ❏ ❏
■C :3. ❏ ❏
Début Fin
■A :4. ❏ ❏
■B :6. ❏ ❏
■C :3. ❏ ❏
■D :12. ❏ ❏
Début Fin
■A :Les électrovannes d'échappement. ❏ ❏
■B :L'électrovanne d'admission concernée. ❏ ❏
■C :L'électrovanne d'échappement concernée. ❏ ❏
■D :Les électrovannes d'admission et d'échappement concernées. ❏ ❏
ÉVALUATION 3
Systèmes électroniques de freinage
9. Pourquoi la pédale de frein vibre-t-elle pendant une régulation ABS ?
10. Comment s'effectue une purge du groupe hydraulique sur un système ABS ?
11. Combien de voyants sont utilisés pour la fonction ABS ?
12. A quoi sert le 5ème capteur sur les véhicules à 4 roues motrices comme le RENAULT Scénic RX4 ?
Début Fin
■A :Pour avertir l'utilisateur qu'il est en régulation ABS. ❏ ❏
■B :A cause des mouvements de liquide de frein dans le circuit (va-et-vient) dus à la mise en marche de la pompe hydraulique. ❏ ❏
■C : Il n'y a pas de vibration de la pédale de frein lors de régulation ABS. ❏ ❏
■D :La vibration est due à l'auto test du calculateur ABS. ❏ ❏
Début Fin
■A : Il n'y a pas de méthode particulière. ❏ ❏
■B :De la même façon qu'une purge sur un système classique. ❏ ❏
■C :En respectant l'ordre de purge. ❏ ❏
■D :A l'aide de l'outil de diagnostic et en respectant l'ordre de purge. ❏ ❏
Début Fin
■A :1. ❏ ❏
■B :2. ❏ ❏
■C :3. ❏ ❏
Début Fin
■A : Il contribue au calcul de la vitesse de référence. ❏ ❏
■B : Il permet de remplacer une information d'un capteur de vitesse de roue hors service. ❏ ❏
■C : Il n'est pas utilisé pour la fonction ABS. ❏ ❏
Systèmes électroniques de freinage
4 ÉVALUATION
13. Quel voyant est utilisé pour la fonction REF ?
14. Combien de capteur (s) et d'actuateur (s) spécifique (s) comporte un AFU électrique ?
15. Sur quel élément les systèmes AFU agissent-ils ?
16. Comment le système ESP corrige du sous-virage ?
Début Fin
■A :ABS. ❏ ❏
■B :SERVICE. ❏ ❏
■C :STOP. ❏ ❏
■D :Aucun. ❏ ❏
Début Fin
■A :2. ❏ ❏
■B :1. ❏ ❏
■C :3. ❏ ❏
Début Fin
■A :Le piston palpeur. ❏ ❏
■B :Le disque de réaction. ❏ ❏
■C :La membrane. ❏ ❏
■D :La soupape régulatrice. ❏ ❏
Début Fin
■A :Par le freinage de la roue arrière extérieure au virage et par la réduction du couple moteur.
❏ ❏
■B :Par la réduction du couple moteur. ❏ ❏
■C :Par le freinage de la roue arrière intérieure au virage. ❏ ❏
■D :Par le freinage de la roue arrière intérieure au virage et par la réduction du couple moteur. ❏ ❏
ÉVALUATION 5
Systèmes électroniques de freinage
17. Combien d'électrovannes y a t il dans un bloc ESP de type BOSCH 8.0 ?
18. Quel capteur nécessite un apprentissage après son remplacement ?
19. A quoi sert le relais monté sur le circuit de feux de stop sur un système ESP avec AFU électrique ?
20. Quel est le but de la fonction CSV ?
Début Fin
■A :4. ❏ ❏
■B :6. ❏ ❏
■C :8. ❏ ❏
■D :12. ❏ ❏
Début Fin
■A :Capteur combiné. ❏ ❏
■B :Capteur angle volant. ❏ ❏
■C :Capteur pression de frein. ❏ ❏
Début Fin
■A :Donner l'information au calculateur ESP que les feux de stop sont allumés. ❏ ❏
■B :Allumer les feux de stop. ❏ ❏
■C :Eviter l'allumage des feux de stop. ❏ ❏
Début Fin
■A :Améliorer la correction du sous-virage. ❏ ❏
■B :Améliorer la correction du sur-virage. ❏ ❏
■C :Améliorer les 2 corrections. ❏ ❏

FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 1
SOMMAIRESOMMAIRE
PRÉSENTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Notions physiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
LES PRESTATIONS DISPONIBLES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
INFORMATION FONDAMENTALE : LA VITESSE DU VÉHICULE . . . . . . . . . . 7Les capteurs de vitesse de roue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
LE SYSTÈME ABS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Pourquoi l’ABS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Comment procède-t-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Synoptique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Le bloc ABS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Les véhicules à 4 roues motrices (RENAULT Scénic Rx4) . . . . . . . . . . . . . . . 22
PRESTATIONS COMPLÉMENTAIRES DU SYSTÈME ABS . . . . . . . . . . . . . . . 23Le Répartiteur Électronique de Freinage (REF) . . . . . . . . . . . . . . . . . . . . . . . 23Le contrôle du couple moteur (MSR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
L’ASSISTANCE AU FREINAGE D’URGENCE (AFU) . . . . . . . . . . . . . . . . . . . . 27Pourquoi ce système ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Solutions techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Rappel du fonctionnement de l’assistance de freinage classique . . . . . . . . . . 29Principe de fonctionnement de l’AFU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Particularité de l’AFU électrique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
SYSTÈME CONTRÔLE DYNAMIQUE DE CONDUITE (ESP) . . . . . . . . . . . . . . 35Pourquoi le contrôle dynamique de conduite ? . . . . . . . . . . . . . . . . . . . . . . . . 35Principe de fonctionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Synoptique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Le bloc ESP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Description du fonctionnement hydraulique. . . . . . . . . . . . . . . . . . . . . . . . . . . 42Description du fonctionnement électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Particularité des véhicules ESP avec AFU électrique . . . . . . . . . . . . . . . . . . . 52
LES PRESTATIONS COMPLÉMENTAIRES DU SYSTÈME ESP . . . . . . . . . . . 53Le Contrôle de Sous-Virage (CSV) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53La fonction anti-patinage (ASR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
GLOSSAIREABS Anti-Blokier System (anti-blocage de roues)AFU Assistance au Freinage d’UrgenceASR Anti Skid Regulation (anti-patinage)CSV Contrôle du Sous-VirageDAEV Direction à Assistance Électrique VariableESP Électronic Stability Program (contrôle dynamique de conduite)MSR Motor Scheppmomenten Reguleng (régulation du couple moteur)REF Répartiteur Électronique de FreinageUCH Unité Centrale Habitacle
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 3
Notions physiquesLe comportement dynamique d’un véhicule est lié en permanence à 3 paramètres :
- le conducteur,- le véhicule,- la chaussée.
Lorsque les conditions de circulation nécessitent un ralentissement ou un arrêt completdu véhicule (freinage normal ou d’urgence), le conducteur doit agir :
- sur la pédale de frein,- sur le volant pour éviter l’obstacle pouvant se présenter devant lui.
Le véhicule réagit à l’aide des freins qui vont exercer un couple sur les différentesroues, créant ainsi des forces de freinage.
L’arrêt du véhicule est ainsi toujours conditionné par :
- La bonne appréciation du conducteur en temps et en dosage de ses réactions.- La bonne réponse du véhicule.- L’état de la chaussée définissant le niveau d’adhérence avec le pneumatique.
Relation glissement/adhérenceCe que l’on entend par glissement, c’est la différence de vitesse entre les roues. Leglissement se calcule ainsi :
- Glissement = .- V = vitesse véhicule.- v = vitesse roue freinée.
Si le glissement augmente au-delà d’une certaine valeur, l’adhérence diminue. Leblocage d’une roue est ainsi obtenu avec un glissement de 100 %.
Le glissement et l’adhérence sont complètement liés ; pour obtenir la meilleureadhérence entre le pneumatique et la chaussée, il est nécessaire d’atteindre un certaintaux de glissement. Ce glissement provoque une usure du pneumatique.
V v–( )V
-----------------
PRÉSENTATIONPRÉSENTATION
Présentation
4 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
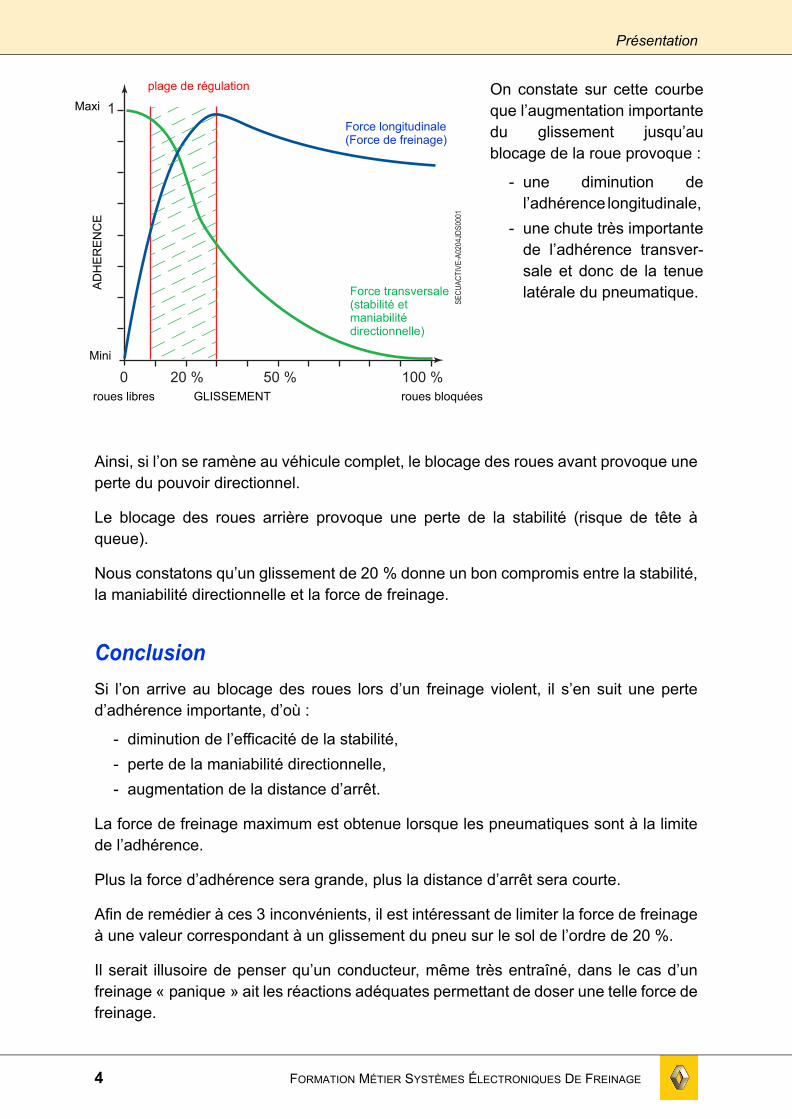
Ainsi, si l’on se ramène au véhicule complet, le blocage des roues avant provoque uneperte du pouvoir directionnel.
Le blocage des roues arrière provoque une perte de la stabilité (risque de tête àqueue).
Nous constatons qu’un glissement de 20 % donne un bon compromis entre la stabilité,la maniabilité directionnelle et la force de freinage.
ConclusionSi l’on arrive au blocage des roues lors d’un freinage violent, il s’en suit une perted’adhérence importante, d’où :
- diminution de l’efficacité de la stabilité,- perte de la maniabilité directionnelle,- augmentation de la distance d’arrêt.
La force de freinage maximum est obtenue lorsque les pneumatiques sont à la limitede l’adhérence.
Plus la force d’adhérence sera grande, plus la distance d’arrêt sera courte.
Afin de remédier à ces 3 inconvénients, il est intéressant de limiter la force de freinageà une valeur correspondant à un glissement du pneu sur le sol de l’ordre de 20 %.
Il serait illusoire de penser qu’un conducteur, même très entraîné, dans le cas d’unfreinage « panique » ait les réactions adéquates permettant de doser une telle force defreinage.
1
0 20 % 50 % 100 %
SE
CU
AC
TIV
E-A
02
04
JD
S0
00
1
On constate sur cette courbeque l’augmentation importantedu glissement jusqu’aublocage de la roue provoque :
- une diminution del’adhérence longitudinale,
- une chute très importantede l’adhérence transver-sale et donc de la tenuelatérale du pneumatique.
roues libres GLISSEMENT roues bloquées
plage de régulation
Force longitudinale(Force de freinage)
Force transversale(stabilité et maniabilité directionnelle)
MaxiAD
HER
ENC
E
Mini
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 5
Prestations Description
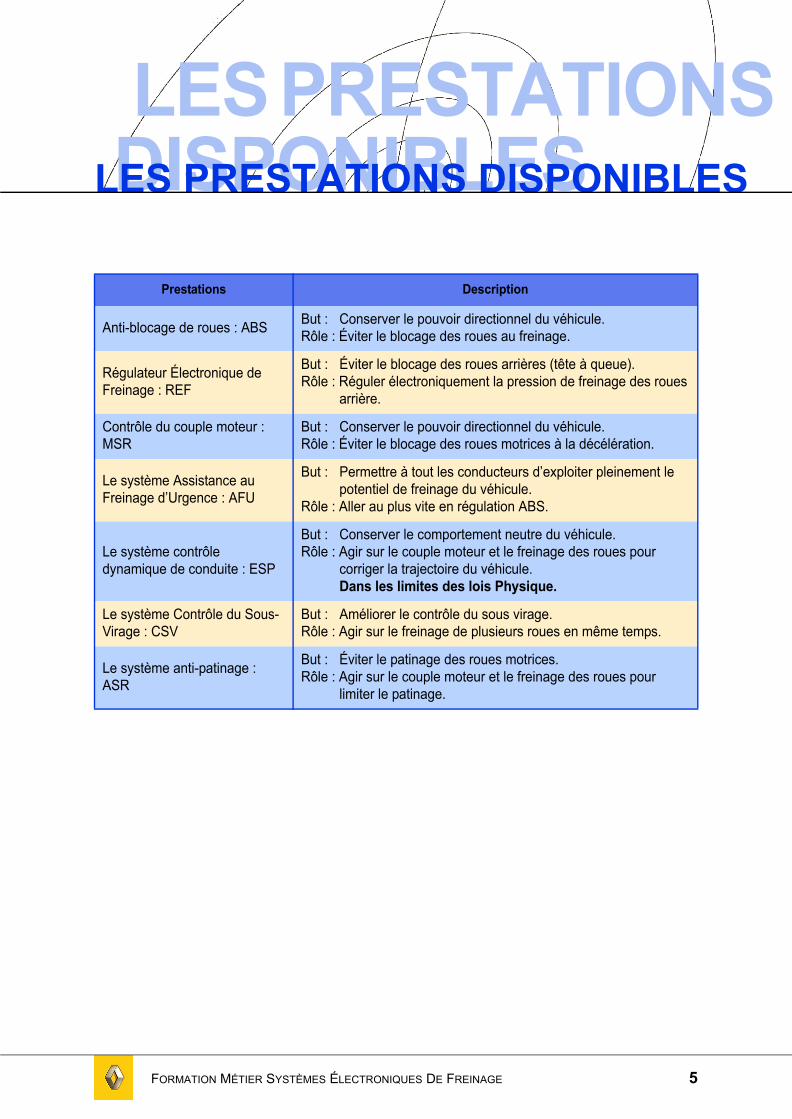
Anti-blocage de roues : ABS But : Conserver le pouvoir directionnel du véhicule.Rôle : Éviter le blocage des roues au freinage.
Régulateur Électronique de Freinage : REF
But : Éviter le blocage des roues arrières (tête à queue).Rôle : Réguler électroniquement la pression de freinage des roues
arrière.
Contrôle du couple moteur : MSR
But : Conserver le pouvoir directionnel du véhicule.Rôle : Éviter le blocage des roues motrices à la décélération.
Le système Assistance au Freinage d’Urgence : AFU
But : Permettre à tout les conducteurs d’exploiter pleinement lepotentiel de freinage du véhicule.
Rôle : Aller au plus vite en régulation ABS.
Le système contrôle dynamique de conduite : ESP
But : Conserver le comportement neutre du véhicule.Rôle : Agir sur le couple moteur et le freinage des roues pour
corriger la trajectoire du véhicule.Dans les limites des lois Physique.
Le système Contrôle du Sous-Virage : CSV
But : Améliorer le contrôle du sous virage.Rôle : Agir sur le freinage de plusieurs roues en même temps.
Le système anti-patinage : ASR
But : Éviter le patinage des roues motrices.Rôle : Agir sur le couple moteur et le freinage des roues pour
limiter le patinage.
LES PRESTATIONS DISPONIBLESLES PRESTATIONS DISPONIBLES

FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 7
Le principe de fonctionnement des systèmes électroniques de freinage est basé sur lecalcul du glissement de chacune des roues. Précédemment, nous avons vu que lemeilleur compromis (stabilité/force de freinage) se situe aux alentours de 20 % deglissement.
Le rôle des capteurs est de donner une image électrique de la vitesse des roues. Apartir de ces informations, le calculateur détermine le glissement de chacune d’elles.
Les capteurs de vitesse de roueDeux familles de capteur de vitesse de roue existent :
- les capteurs passifs,- les capteurs actifs.
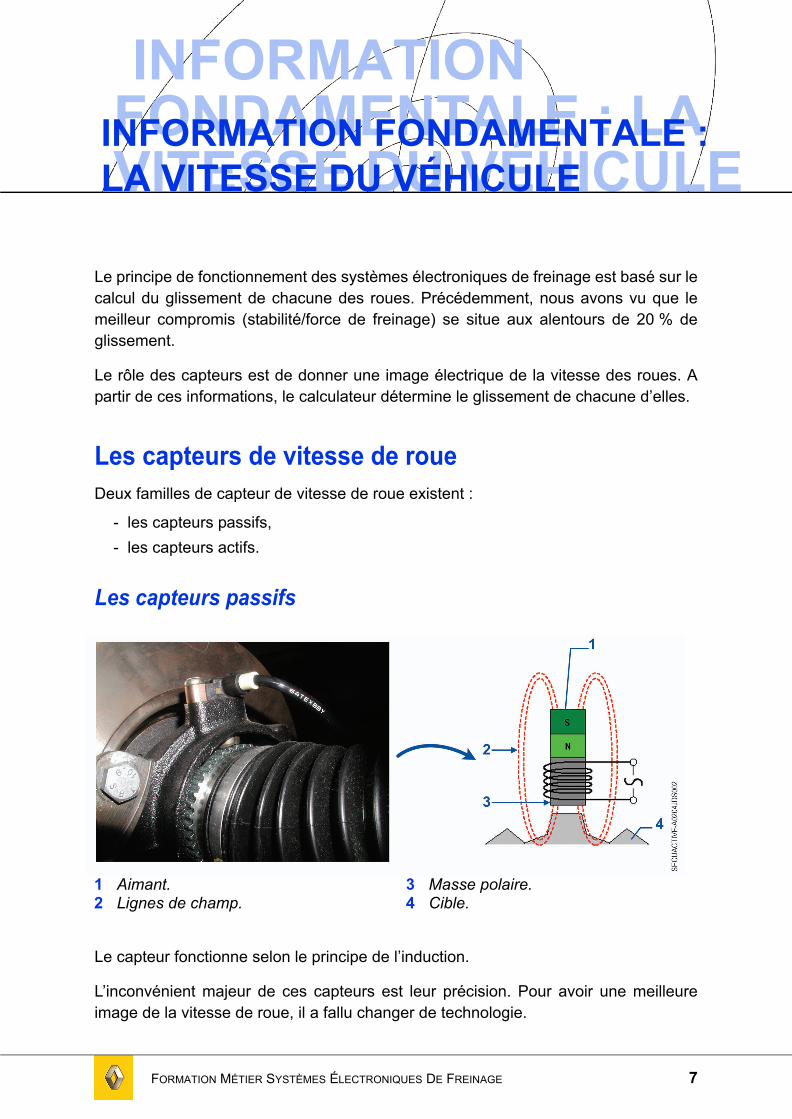
Les capteurs passifs
Le capteur fonctionne selon le principe de l’induction.
L’inconvénient majeur de ces capteurs est leur précision. Pour avoir une meilleureimage de la vitesse de roue, il a fallu changer de technologie.
1 Aimant.2 Lignes de champ.
3 Masse polaire.4 Cible.
INFORMATION FONDAMENTALE : LA VITESSE DU VÉHICULE
INFORMATION FONDAMENTALE : LA VITESSE DU VÉHICULE
Information fondamentale : la vitesse du véhicule
8 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
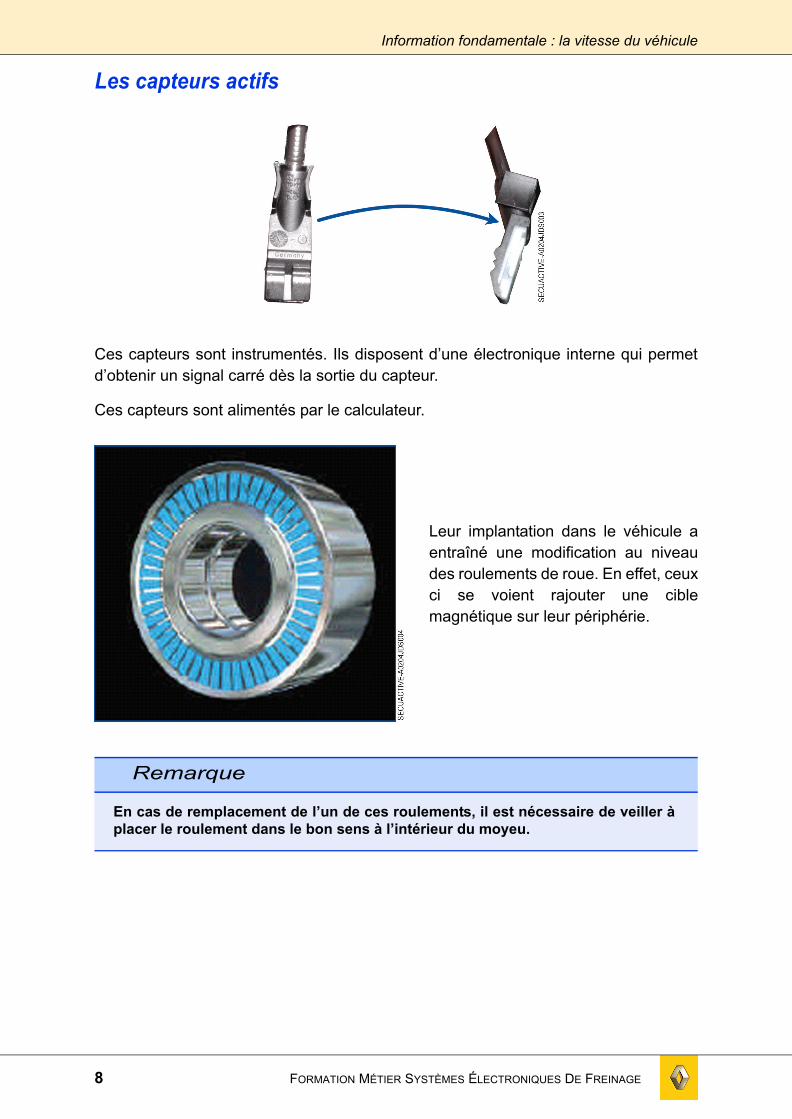
Les capteurs actifs
Ces capteurs sont instrumentés. Ils disposent d’une électronique interne qui permetd’obtenir un signal carré dès la sortie du capteur.
Ces capteurs sont alimentés par le calculateur.
Remarque
En cas de remplacement de l’un de ces roulements, il est nécessaire de veiller àplacer le roulement dans le bon sens à l’intérieur du moyeu.
Leur implantation dans le véhicule aentraîné une modification au niveaudes roulements de roue. En effet, ceuxci se voient rajouter une ciblemagnétique sur leur périphérie.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 9
Information fondamentale : la vitesse du véhicule
Le signal de sortie, traité par l’électronique interne, se présente sous la forme d’unsignal carré à fréquence variable.
Ces capteurs offrent l’avantage d’exploiter la vitesse du véhicule depuis 0 km/h. Ilssont également moins sensibles aux variations d’entrefer.
Le système ABS fournit l’information vitesse à tout le véhicule :
- via le réseau multiplexé,- via une liaison filaire pour les systèmes non présents sur le réseau multiplexé.
Remarque
RENAULT Nouveau Trafic dispose de deux capteurs actifs à l’avant et de deuxcapteurs passifs à l’arrière.
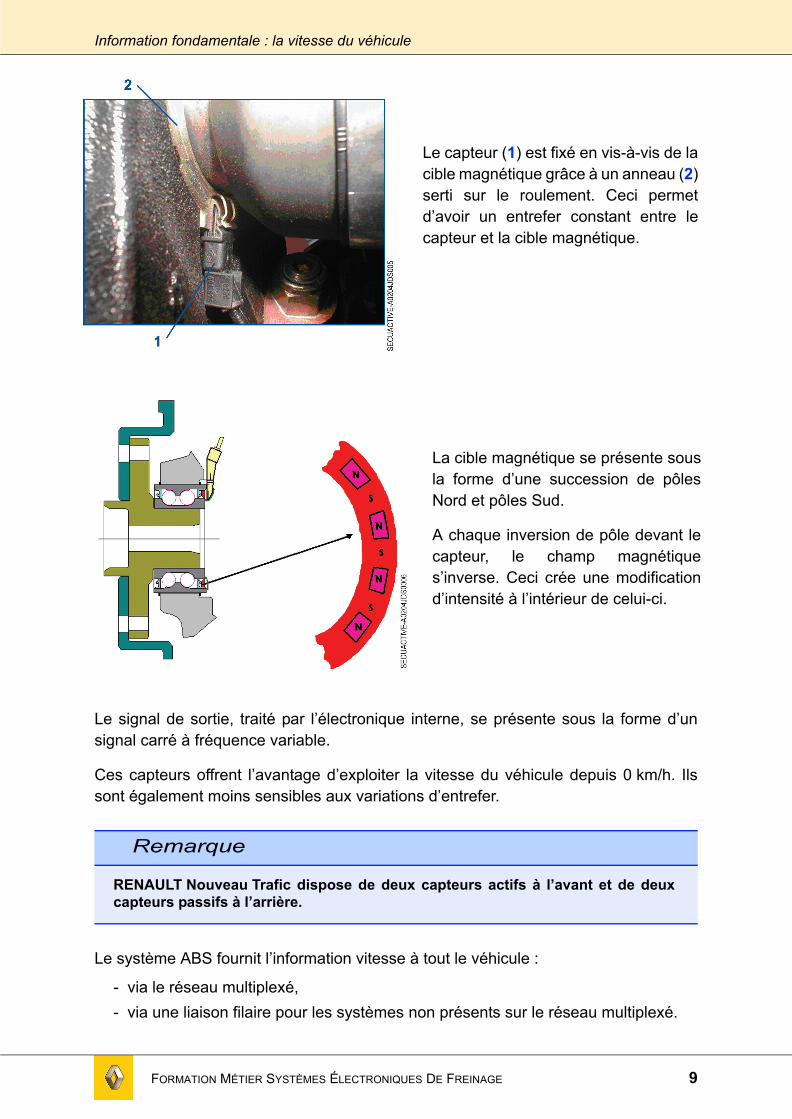
Le capteur (1) est fixé en vis-à-vis de lacible magnétique grâce à un anneau (2)serti sur le roulement. Ceci permetd’avoir un entrefer constant entre lecapteur et la cible magnétique.
La cible magnétique se présente sousla forme d’une succession de pôlesNord et pôles Sud.
A chaque inversion de pôle devant lecapteur, le champ magnétiques’inverse. Ceci crée une modificationd’intensité à l’intérieur de celui-ci.
Information fondamentale : la vitesse du véhicule
10 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
Pour cela, il est nécessaire d’apprendre avec précision la circonférence despneumatiques au calculateur ABS. C’est pour cela que l’on programme l’indextachymétrique.
Contrôles possibles :
Capteurs passifs : - Propreté de la cible/capteur.- Entrefer.- Résistance du capteur.- Contrôle de la cible avec l’outil de diagnostic.
Capteurs actifs : - Propreté de la cible/capteur.- Entrefer.- Tension d’alimentation du capteur.- Contrôle de la cible avec l’outil de diagnostic.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 11
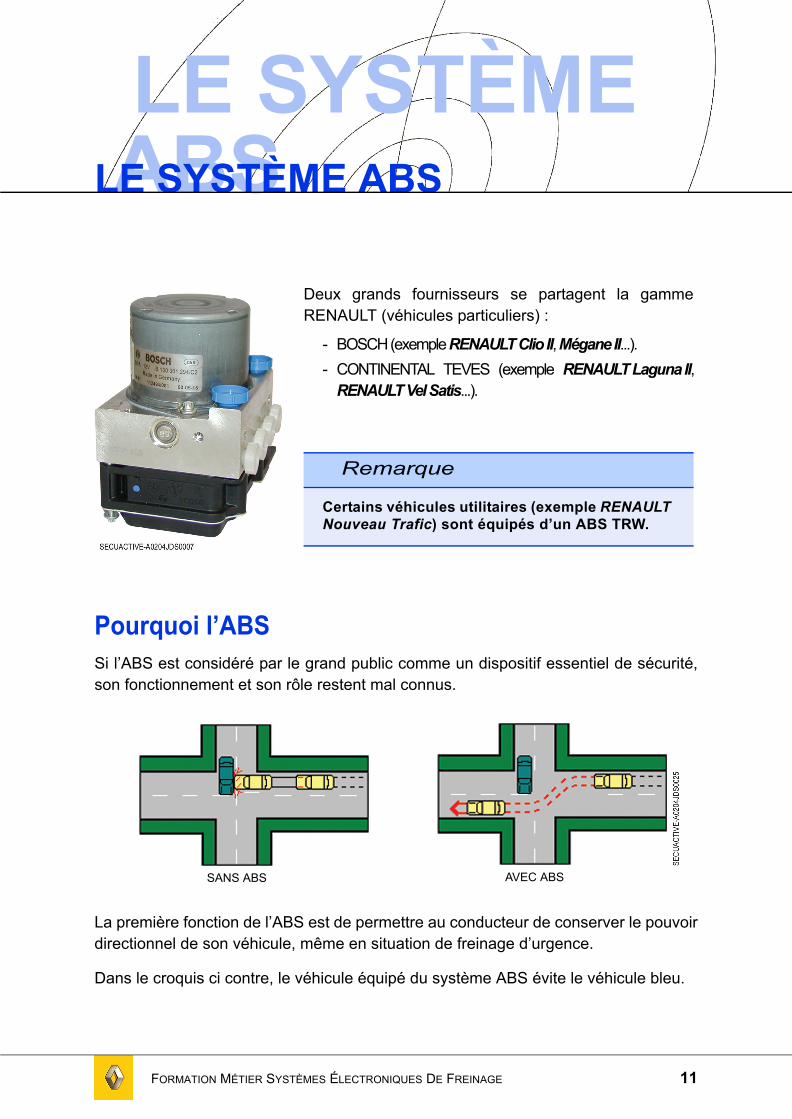
Pourquoi l’ABSSi l’ABS est considéré par le grand public comme un dispositif essentiel de sécurité,son fonctionnement et son rôle restent mal connus.
La première fonction de l’ABS est de permettre au conducteur de conserver le pouvoirdirectionnel de son véhicule, même en situation de freinage d’urgence.
Dans le croquis ci contre, le véhicule équipé du système ABS évite le véhicule bleu.
Deux grands fournisseurs se partagent la gammeRENAULT (véhicules particuliers) :
- BOSCH (exemple RENAULTClioII, MéganeII...).- CONTINENTAL TEVES (exemple RENAULTLagunaII,
RENAULTVelSatis...).
Remarque
Certains véhicules utilitaires (exemple RENAULTNouveau Trafic) sont équipés d’un ABS TRW.
SANS ABS AVEC ABS
LE SYSTÈME ABSLE SYSTÈME ABS
Le système ABS
12 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
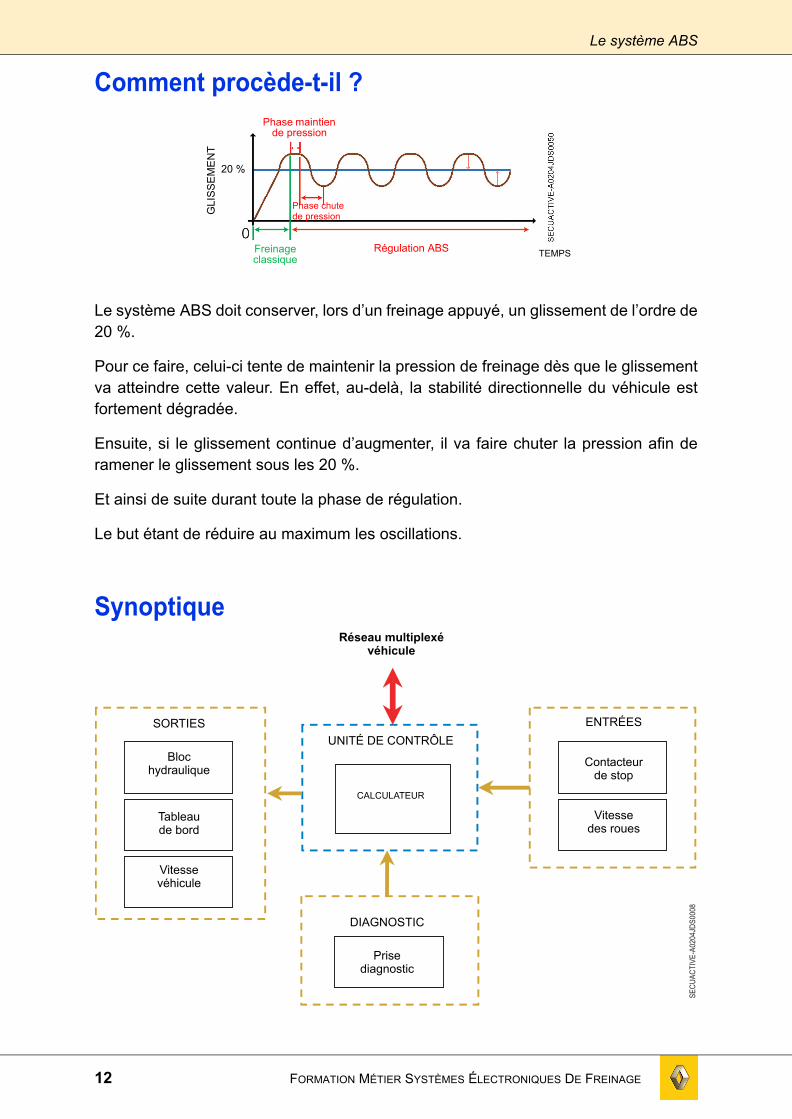
Comment procède-t-il ?
Le système ABS doit conserver, lors d’un freinage appuyé, un glissement de l’ordre de20 %.
Pour ce faire, celui-ci tente de maintenir la pression de freinage dès que le glissementva atteindre cette valeur. En effet, au-delà, la stabilité directionnelle du véhicule estfortement dégradée.
Ensuite, si le glissement continue d’augmenter, il va faire chuter la pression afin deramener le glissement sous les 20 %.
Et ainsi de suite durant toute la phase de régulation.
Le but étant de réduire au maximum les oscillations.
Synoptique
Freinage classique
Régulation ABS TEMPS
Phase chute de pression
Phase maintien de pression
20 %
GLI
SSEM
ENT
SE
CU
AC
TIV
E-A
02
04
JD
S0
00
8
Réseau multiplexévéhicule
SORTIES
Bloc hydraulique
Tableaude bord
Vitesse véhicule
UNITÉ DE CONTRÔLE
CALCULATEUR
ENTRÉES
Contacteurde stop
Vitessedes roues
DIAGNOSTIC
Prise diagnostic

FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 13
Le système ABS
Le bloc ABS
Le bloc ABS (1) se compose de deux éléments :
- le calculateur (3),- le groupe hydraulique (2).
Ces deux éléments, suivant les modèles, peuvent se remplacer indépendamment.
Le groupe hydraulique
Le groupe hydraulique regroupe :
- les huit électrovannes de roue (1),- la pompe hydraulique (2).
Chaque roue dispose de deuxélectrovannes :
- une d’admission ouverte au repos,- une d’échappement fermée au
repos.
Le système ABS
14 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
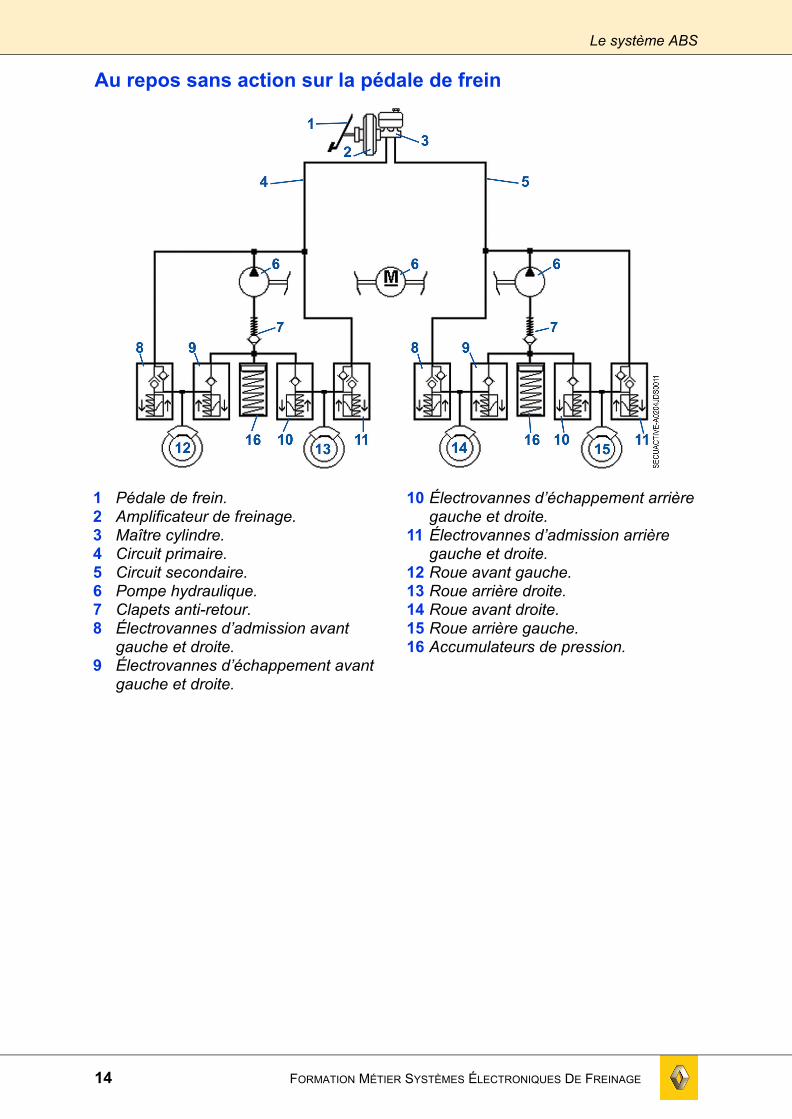
Au repos sans action sur la pédale de frein
1 Pédale de frein.2 Amplificateur de freinage.3 Maître cylindre.4 Circuit primaire.5 Circuit secondaire.6 Pompe hydraulique.7 Clapets anti-retour.8 Électrovannes d’admission avant
gauche et droite.9 Électrovannes d’échappement avant
gauche et droite.
10 Électrovannes d’échappement arrière gauche et droite.
11 Électrovannes d’admission arrière gauche et droite.
12 Roue avant gauche.13 Roue arrière droite.14 Roue avant droite.15 Roue arrière gauche.16 Accumulateurs de pression.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 15
Le système ABS
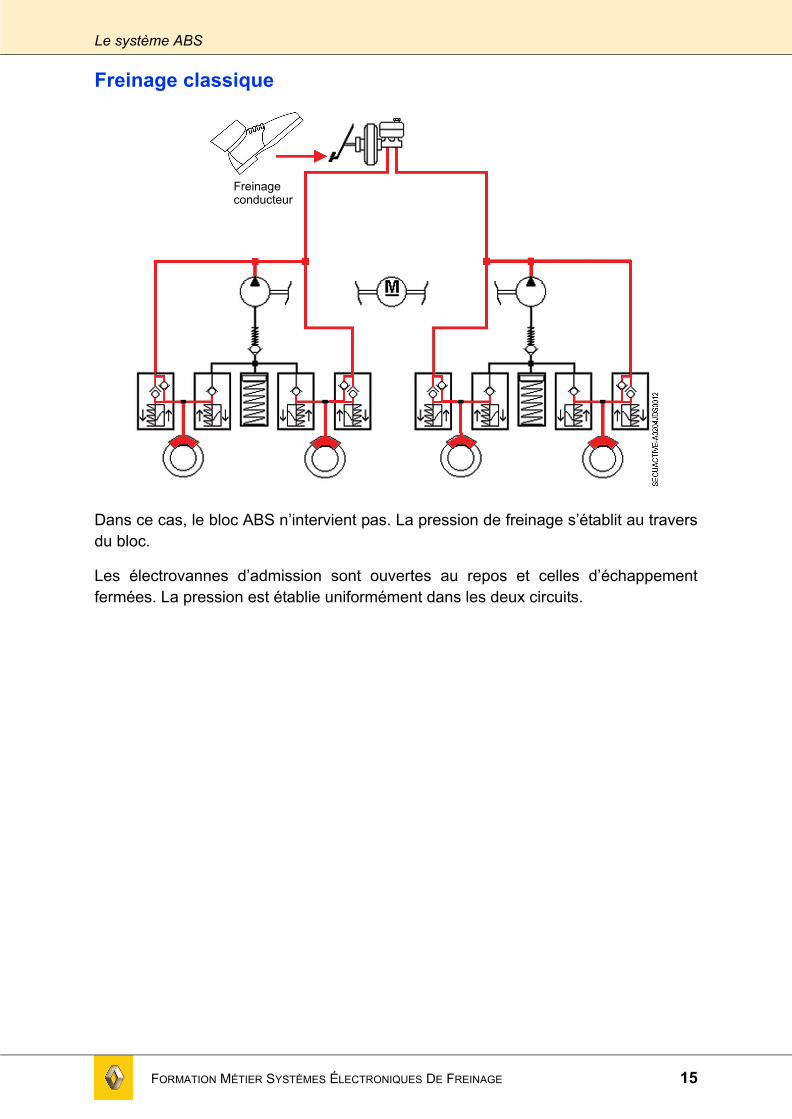
Freinage classique
Dans ce cas, le bloc ABS n’intervient pas. La pression de freinage s’établit au traversdu bloc.
Les électrovannes d’admission sont ouvertes au repos et celles d’échappementfermées. La pression est établie uniformément dans les deux circuits.
Freinage conducteur
Le système ABS
16 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
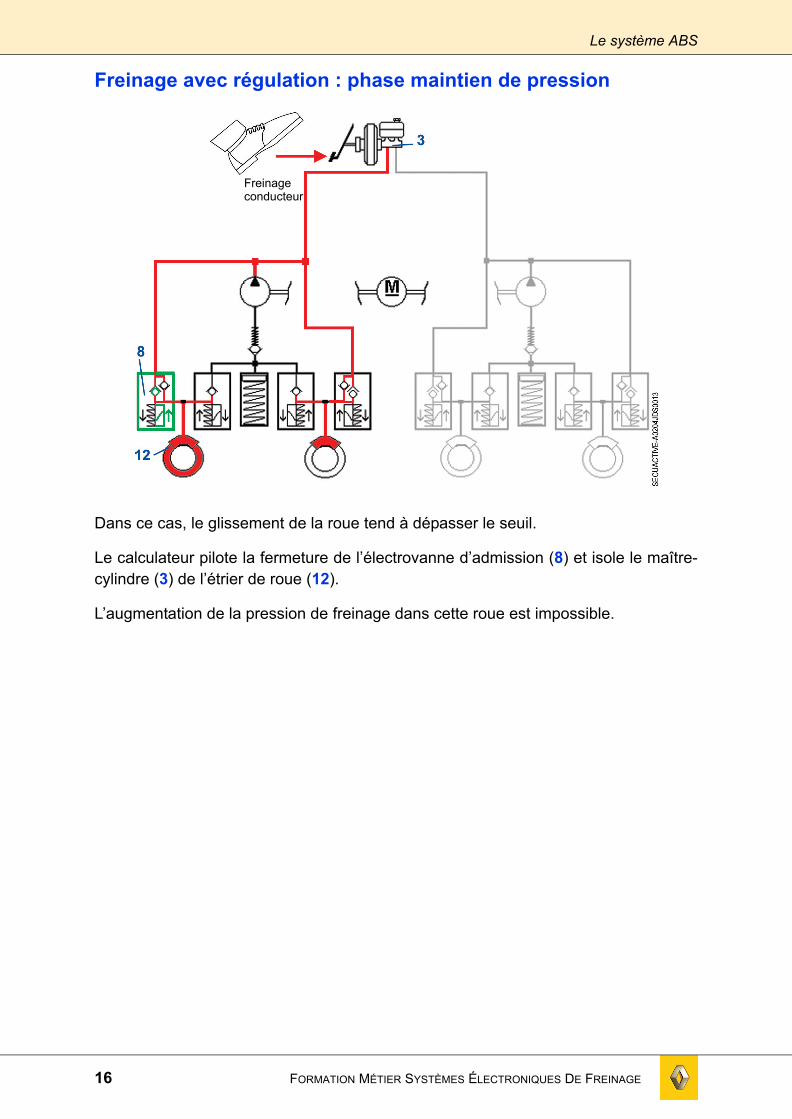
Freinage avec régulation : phase maintien de pression
Dans ce cas, le glissement de la roue tend à dépasser le seuil.
Le calculateur pilote la fermeture de l’électrovanne d’admission (8) et isole le maître-cylindre (3) de l’étrier de roue (12).
L’augmentation de la pression de freinage dans cette roue est impossible.
Freinage conducteur
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 17
Le système ABS
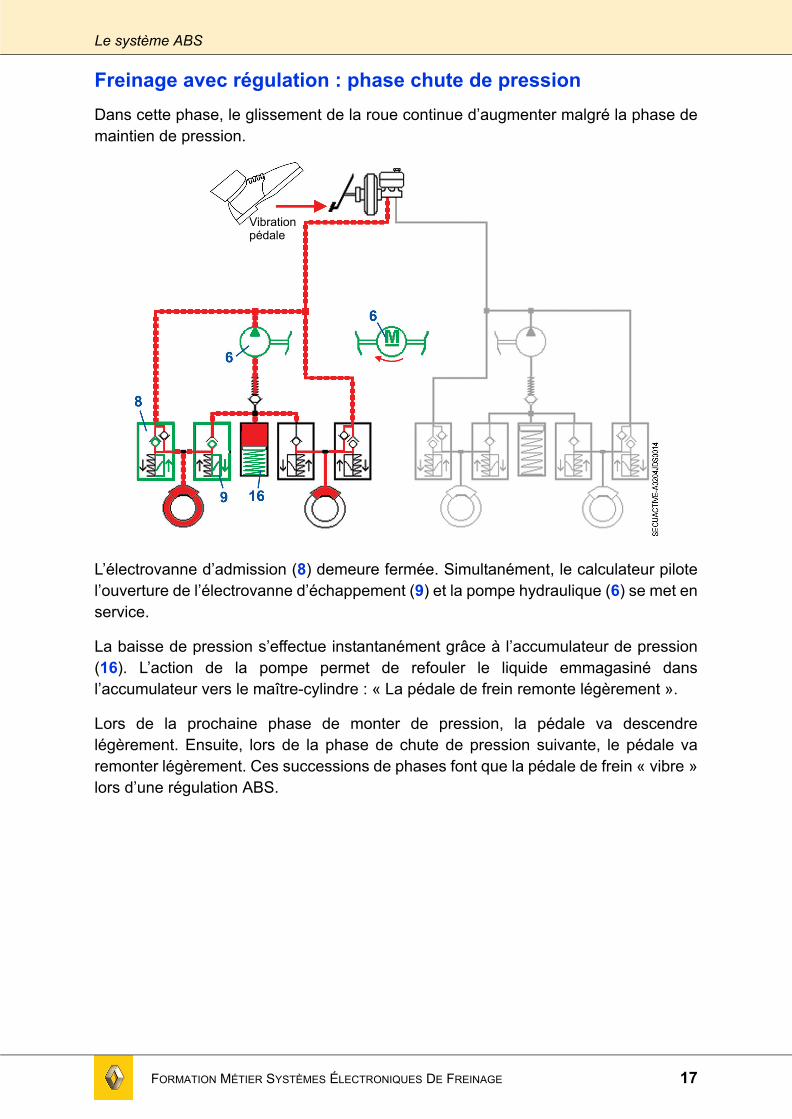
Freinage avec régulation : phase chute de pressionDans cette phase, le glissement de la roue continue d’augmenter malgré la phase demaintien de pression.
L’électrovanne d’admission (8) demeure fermée. Simultanément, le calculateur pilotel’ouverture de l’électrovanne d’échappement (9) et la pompe hydraulique (6) se met enservice.
La baisse de pression s’effectue instantanément grâce à l’accumulateur de pression(16). L’action de la pompe permet de refouler le liquide emmagasiné dansl’accumulateur vers le maître-cylindre : « La pédale de frein remonte légèrement ».
Lors de la prochaine phase de monter de pression, la pédale va descendrelégèrement. Ensuite, lors de la phase de chute de pression suivante, le pédale varemonter légèrement. Ces successions de phases font que la pédale de frein « vibre »lors d’une régulation ABS.
Vibration pédale
Le système ABS
18 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
Régulation ABSCes 3 phases (maintien, relâchement et augmentation de pression) constituent unerégulation ABS.
Plus le nombre de régulation ABS est important, plus la régulation de la pression estfine.
Les systèmes actuels peuvent faire entre 30 à 50 régulations par seconde.
L’entretien : la purge hydrauliqueEn cas de remplacement, les blocs hydrauliques sont livrés préremplis.
Pour assurer un bon fonctionnement hydraulique, il est nécessaire d’effectuer unepurge du système.
Cette purge s’effectue de manière conventionnelle. Pour valider le bon fonctionnementhydraulique du système, il est nécessaire d’effectuer un essai routier avec régulationsABS.
Si le comportement de la pédale de frein évolue (présence d’air dans le bloc), il estnécessaire d’effectuer une purge du groupe hydraulique avec l’outil de diagnostic.
Pour assurer une bonne évacuation de l’air du groupe hydraulique, il est impératif derespecter l’ordre inscrit dans le Manuel de Réparation. Cet ordre varie suivant lessystèmes.
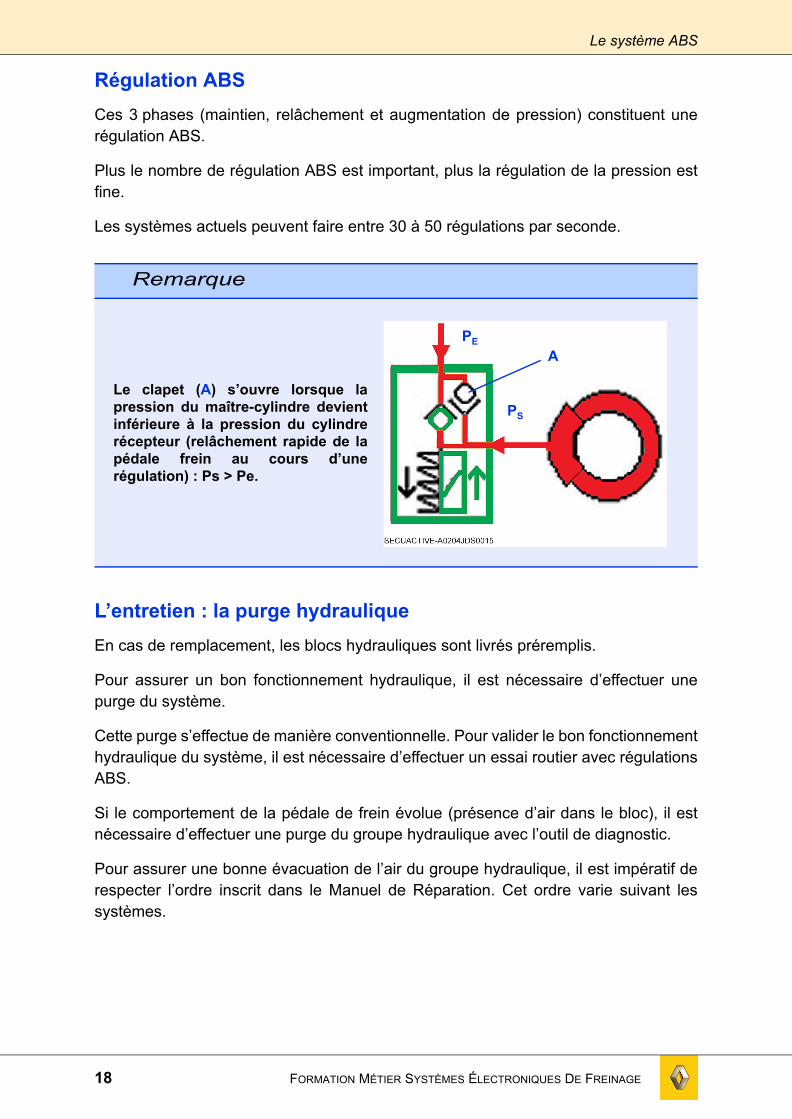
Remarque
Le clapet (A) s’ouvre lorsque lapression du maître-cylindre devientinférieure à la pression du cylindrerécepteur (relâchement rapide de lapédale frein au cours d’unerégulation) : Ps > Pe.
APE
PS
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 19
Le système ABS
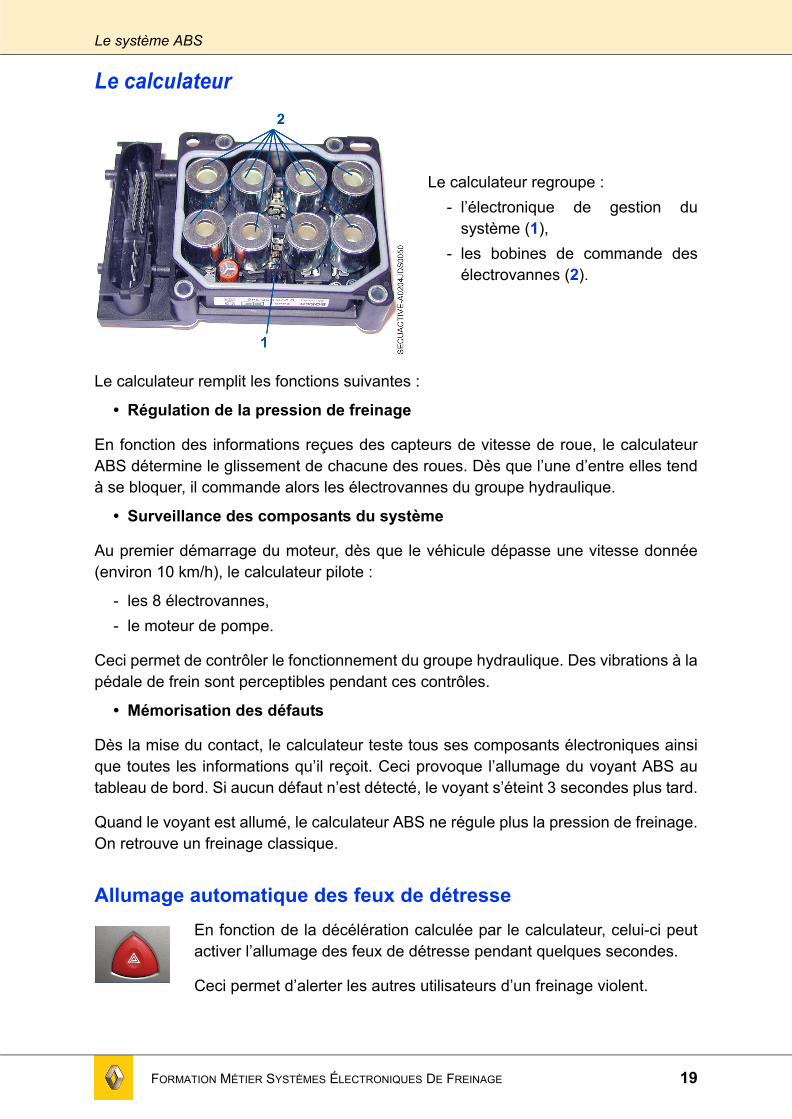
Le calculateur
Le calculateur remplit les fonctions suivantes :
• Régulation de la pression de freinage
En fonction des informations reçues des capteurs de vitesse de roue, le calculateurABS détermine le glissement de chacune des roues. Dès que l’une d’entre elles tendà se bloquer, il commande alors les électrovannes du groupe hydraulique.
• Surveillance des composants du système
Au premier démarrage du moteur, dès que le véhicule dépasse une vitesse donnée(environ 10 km/h), le calculateur pilote :
- les 8 électrovannes,- le moteur de pompe.
Ceci permet de contrôler le fonctionnement du groupe hydraulique. Des vibrations à lapédale de frein sont perceptibles pendant ces contrôles.
• Mémorisation des défauts
Dès la mise du contact, le calculateur teste tous ses composants électroniques ainsique toutes les informations qu’il reçoit. Ceci provoque l’allumage du voyant ABS autableau de bord. Si aucun défaut n’est détecté, le voyant s’éteint 3 secondes plus tard.
Quand le voyant est allumé, le calculateur ABS ne régule plus la pression de freinage.On retrouve un freinage classique.
Allumage automatique des feux de détresse En fonction de la décélération calculée par le calculateur, celui-ci peutactiver l’allumage des feux de détresse pendant quelques secondes.
Ceci permet d’alerter les autres utilisateurs d’un freinage violent.
Le calculateur regroupe :- l’électronique de gestion du
système (1),- les bobines de commande des
électrovannes (2).
Le système ABS
20 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
Une fois le seuil de décélération atteint, le calculateur ABS envoie une requêted’allumage des feux de détresse à l’Unité Centrale Habitacle via le réseau multiplexédu véhicule. L’UCH commande l’allumage puis l’extinction des feux de détresse(automatiquement).
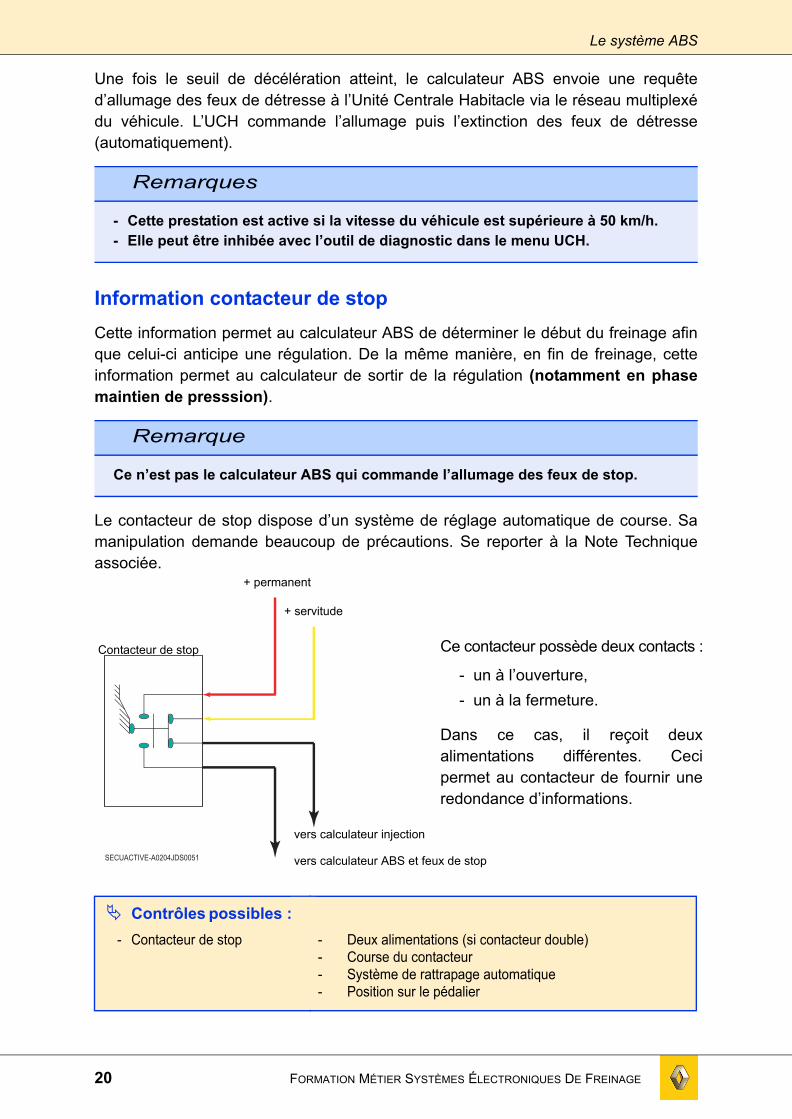
Information contacteur de stopCette information permet au calculateur ABS de déterminer le début du freinage afinque celui-ci anticipe une régulation. De la même manière, en fin de freinage, cetteinformation permet au calculateur de sortir de la régulation (notamment en phasemaintien de presssion).
Le contacteur de stop dispose d’un système de réglage automatique de course. Samanipulation demande beaucoup de précautions. Se reporter à la Note Techniqueassociée.
Remarques
- Cette prestation est active si la vitesse du véhicule est supérieure à 50 km/h.- Elle peut être inhibée avec l’outil de diagnostic dans le menu UCH.
Remarque
Ce n’est pas le calculateur ABS qui commande l’allumage des feux de stop.
Contrôles possibles : - Contacteur de stop - Deux alimentations (si contacteur double)
- Course du contacteur- Système de rattrapage automatique- Position sur le pédalier
SECUACTIVE-A0204JDS0051
+ permanent
+ servitude
Contacteur de stop
vers calculateur injection
vers calculateur ABS et feux de stop
Ce contacteur possède deux contacts :
- un à l’ouverture,- un à la fermeture.
Dans ce cas, il reçoit deuxalimentations différentes. Cecipermet au contacteur de fournir uneredondance d’informations.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 21
Le système ABS
Précautions pour le bon fonctionnement du systèmeEn cas de remplacement du calculateur ABS, il est nécessaire d’effectuer lesconfigurations décrites dans le Manuel de Réparation.
En cas de remplacement du bloc ABS, il est nécessaire, en plus des configurations,d’effectuer une purge du système.
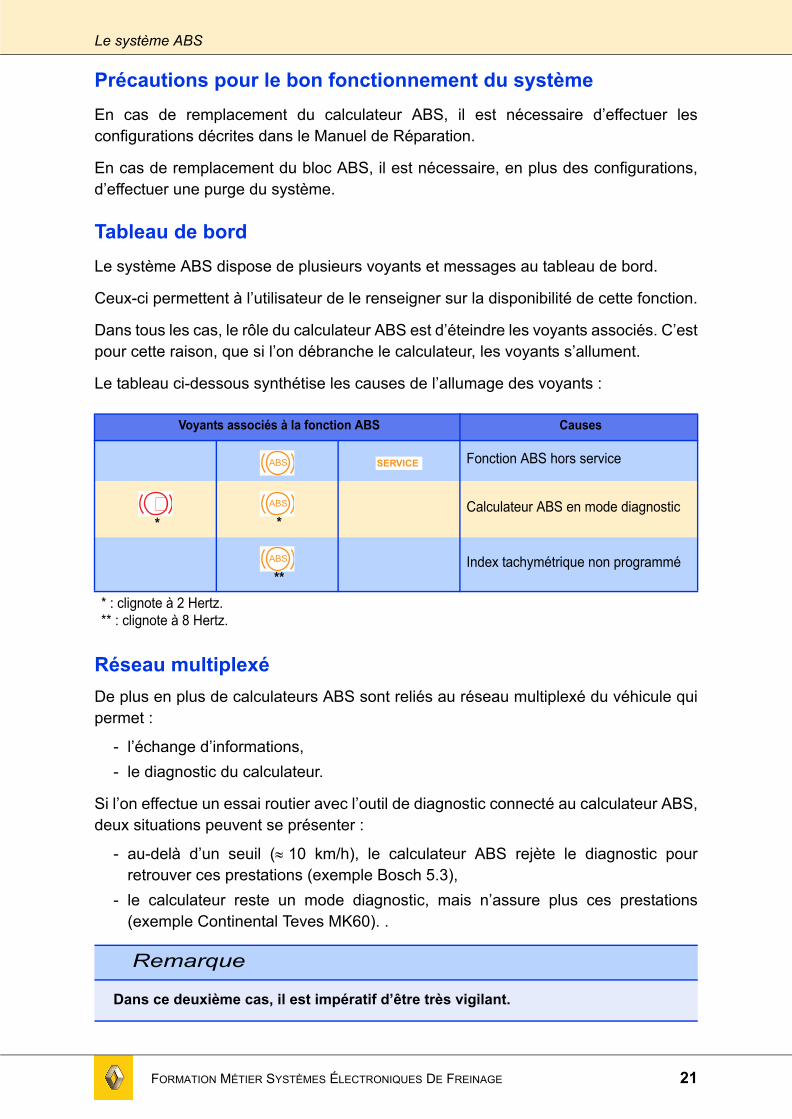
Tableau de bordLe système ABS dispose de plusieurs voyants et messages au tableau de bord.
Ceux-ci permettent à l’utilisateur de le renseigner sur la disponibilité de cette fonction.
Dans tous les cas, le rôle du calculateur ABS est d’éteindre les voyants associés. C’estpour cette raison, que si l’on débranche le calculateur, les voyants s’allument.
Le tableau ci-dessous synthétise les causes de l’allumage des voyants :
Réseau multiplexéDe plus en plus de calculateurs ABS sont reliés au réseau multiplexé du véhicule quipermet :
- l’échange d’informations,- le diagnostic du calculateur.
Si l’on effectue un essai routier avec l’outil de diagnostic connecté au calculateur ABS,deux situations peuvent se présenter :
- au-delà d’un seuil (≈ 10 km/h), le calculateur ABS rejète le diagnostic pourretrouver ces prestations (exemple Bosch 5.3),
- le calculateur reste un mode diagnostic, mais n’assure plus ces prestations(exemple Continental Teves MK60). .
Voyants associés à la fonction ABS Causes
Fonction ABS hors service
*
*Calculateur ABS en mode diagnostic
**Index tachymétrique non programmé
* : clignote à 2 Hertz.** : clignote à 8 Hertz.
Remarque
Dans ce deuxième cas, il est impératif d’être très vigilant.
ABS SERVICE
! ABS
ABS
Le système ABS
22 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
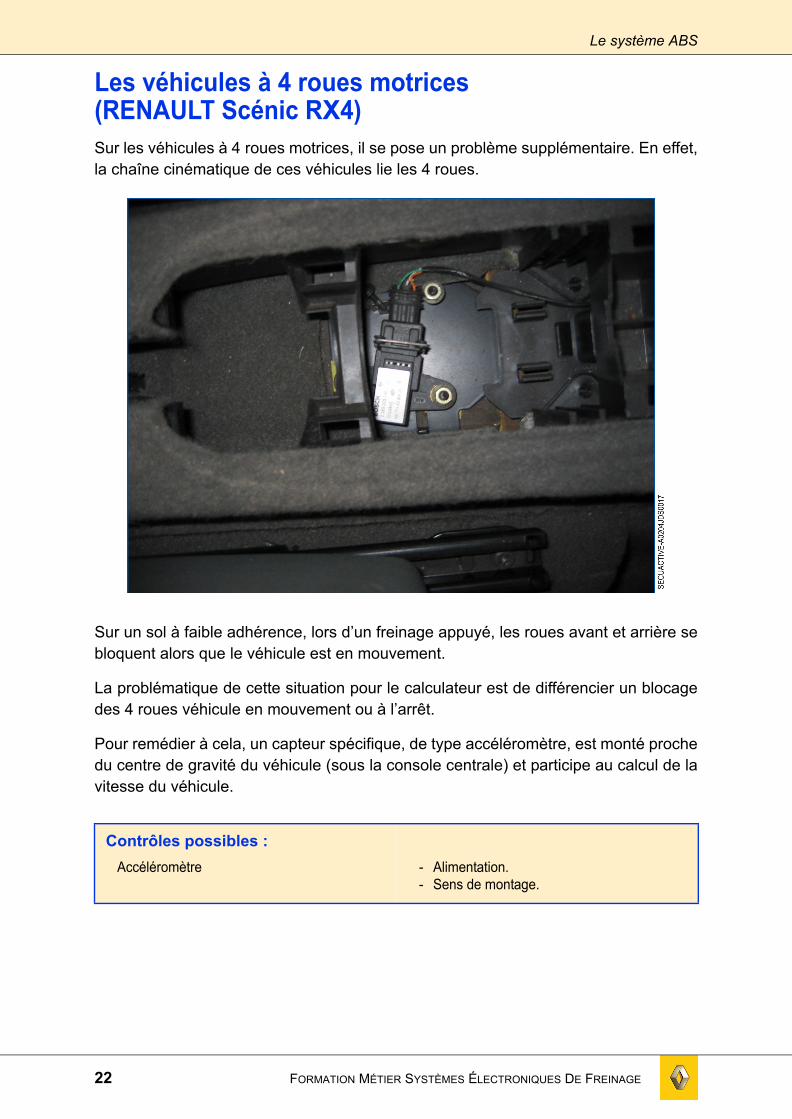
Les véhicules à 4 roues motrices (RENAULT Scénic RX4)Sur les véhicules à 4 roues motrices, il se pose un problème supplémentaire. En effet,la chaîne cinématique de ces véhicules lie les 4 roues.
Sur un sol à faible adhérence, lors d’un freinage appuyé, les roues avant et arrière sebloquent alors que le véhicule est en mouvement.
La problématique de cette situation pour le calculateur est de différencier un blocagedes 4 roues véhicule en mouvement ou à l’arrêt.
Pour remédier à cela, un capteur spécifique, de type accéléromètre, est monté prochedu centre de gravité du véhicule (sous la console centrale) et participe au calcul de lavitesse du véhicule.
Contrôles possibles :Accéléromètre - Alimentation.
- Sens de montage.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 23
Le Répartiteur Électronique de Freinage (REF)C’est un élargissement des prestations offertes par le système ABS. Il permetd’assurer la stabilité du freinage à la place d’un compensateur traditionnel en utilisant :
- le groupe hydraulique,- les capteurs de roue,- un module de logique de régulation supplémentaire.
Principe de fonctionnementLa « logique REF » compare en permanence la vitesse côté par côté, des roues avantet arrière.
Si la vitesse des roues arrière est supérieure ou égale à la vitesse des roues avant, lapression de freinage est identique à l’avant comme à l’arrière.
Si la vitesse des roues arrière devient inférieure à celle des roues avant (à unetolérance près), la logique REF active l’électrovanne d’admission de manière àeffectuer un maintien de pression sur la roue arrière concernée.
Si la vitesse de la roue arrière continue de diminuer, la logique effectue alors une chutede pression contrôlée, en activant l’électrovanne d’échappement concernée.
Si par contre, la vitesse de la roue arrière redevient supérieure à la vitesse des rouesavant (à une tolérance près), la logique REF autorise une montée en pression de laroue arrière de manière contrôlée et très prudente.
Toutes ces actions sont répétées jusqu’à la fin du freinage ou jusqu’à la premièrerégulation ABS sur l’essieu avant.
La fonction REF est opérationnelle uniquement hors régulation ABS sur le trainavant.
De plus, la logique de régulation est dite « Select low ». C’est à dire, que c’est la rouequi tend au blocage qui conditionne la pression de freinage du train arrière.
PRESTATIONS COMPLÉMENTAIRES DU SYSTÈME ABSPRESTATIONS COMPLÉMENTAIRES
DU SYSTÈME ABS
Prestations complémentaires du système ABS
24 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
Les systèmes BOSCH sont en « Select low » en permanence. Continental Tevespasse en « Select low » à partir de 120 km/h.
Ceci évite de causer des instabilités au niveau du train arrière.
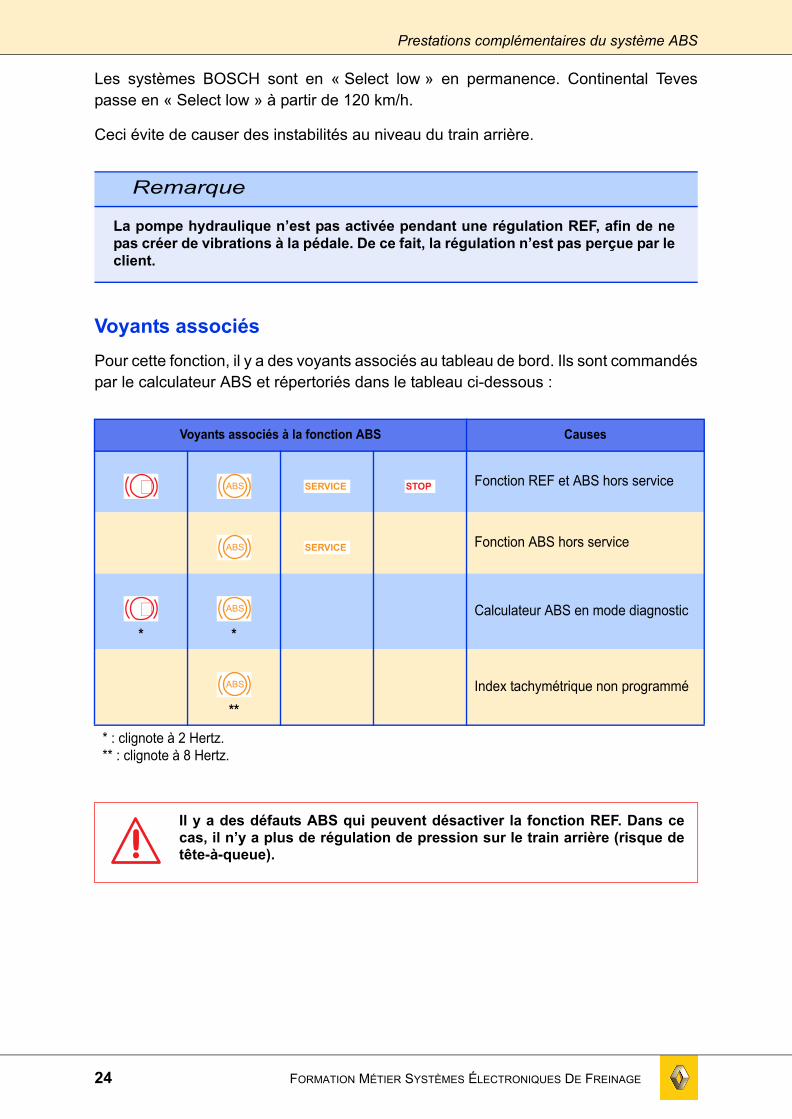
Voyants associésPour cette fonction, il y a des voyants associés au tableau de bord. Ils sont commandéspar le calculateur ABS et répertoriés dans le tableau ci-dessous :
Remarque
La pompe hydraulique n’est pas activée pendant une régulation REF, afin de nepas créer de vibrations à la pédale. De ce fait, la régulation n’est pas perçue par leclient.
Voyants associés à la fonction ABS Causes
Fonction REF et ABS hors service
Fonction ABS hors service
*
* Calculateur ABS en mode diagnostic
** Index tachymétrique non programmé
* : clignote à 2 Hertz.** : clignote à 8 Hertz.
Il y a des défauts ABS qui peuvent désactiver la fonction REF. Dans cecas, il n’y a plus de régulation de pression sur le train arrière (risque detête-à-queue).
! ABS SERVICE STOP
ABS SERVICE
! ABS
ABS
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 25
Prestations complémentaires du système ABS
Le contrôle du couple moteur (MSR)Ce système intervient lorsque l’utilisateur lève brusquement le pied de l’accélérateursur des chaussées offrant une faible adhérence. La tendance au blocage des rouesmotrices peut survenir, car le frein moteur, qui apparaît à la coupure des gaz, devienttrop important vis-à-vis de l’adhérence disponible.
Le système cherche à empêcher ce blocage. Il demande l’augmentation du couplemoteur au calculateur d’injection. La demande est maintenue jusqu’à ce qu’il n’y aitplus de glissement des roues.
Lorsque ce premier résultat est atteint, il s’efforce alors de faire passer le maximum decouple moteur, tout en le régulant pour l’adapter à l’adhérence.
Ainsi, il respecte la volonté de l’utilisateur de ralentir le véhicule, en privilégiant lepouvoir directionnel de celui-ci.
Ce système est la continuité logique de l’ABS.
Cette prestation est possible grâce à une stratégie spécifique intégrée aux calculateursABS, injection et boîte de vitesses automatique.
La mise en réseau des calculateurs via une liaison multiplexée, facilite l’échanged’informations.
Aucun autre capteur n’est utilisé.
Remarque
La fonction MSR est également disponible en boîte de vitesses manuelle.

FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 27
L’ASSISTANCE AU FREINAGE D’URGENCE (AFU)L’ASSISTANCE AU FREINAGE
D’URGENCE (AFU)
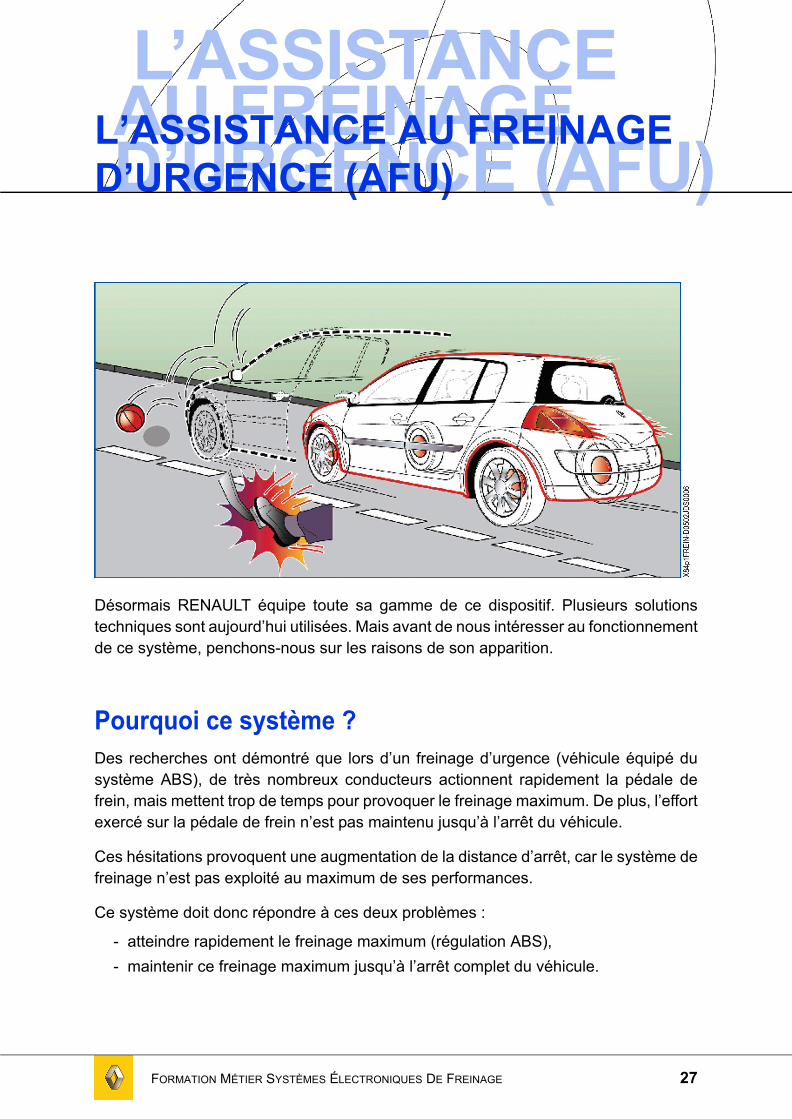
Désormais RENAULT équipe toute sa gamme de ce dispositif. Plusieurs solutionstechniques sont aujourd’hui utilisées. Mais avant de nous intéresser au fonctionnementde ce système, penchons-nous sur les raisons de son apparition.
Pourquoi ce système ?Des recherches ont démontré que lors d’un freinage d’urgence (véhicule équipé dusystème ABS), de très nombreux conducteurs actionnent rapidement la pédale defrein, mais mettent trop de temps pour provoquer le freinage maximum. De plus, l’effortexercé sur la pédale de frein n’est pas maintenu jusqu’à l’arrêt du véhicule.
Ces hésitations provoquent une augmentation de la distance d’arrêt, car le système defreinage n’est pas exploité au maximum de ses performances.
Ce système doit donc répondre à ces deux problèmes :
- atteindre rapidement le freinage maximum (régulation ABS),- maintenir ce freinage maximum jusqu’à l’arrêt complet du véhicule.
L’assistance au freinage d’urgence (AFU)
28 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
Solutions techniquesDeux familles d’AFU existent dans la gamme RENAULT :
- électrique,- mécanique.
Le système électrique est géré par le calculateur ABS. Il n’en existe qu’un seul modèle(CONTINENTAL TEVES).
Les systèmes mécaniques sont complètements indépendants. Il en existe plusieursmodèles dans la gamme (CONTINENTAL TEVES, BOSCH, TRW).
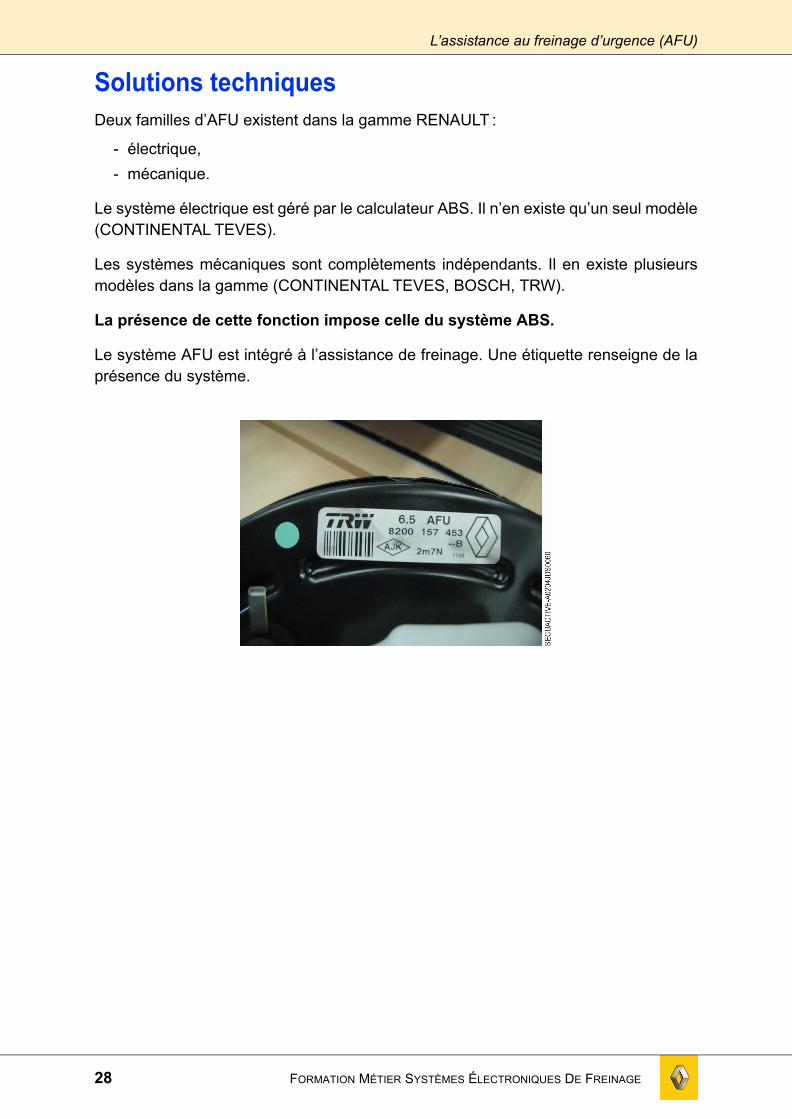
La présence de cette fonction impose celle du système ABS.
Le système AFU est intégré à l’assistance de freinage. Une étiquette renseigne de laprésence du système.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 29
L’assistance au freinage d’urgence (AFU)
Rappel du fonctionnement de l’assistance de freinage classique
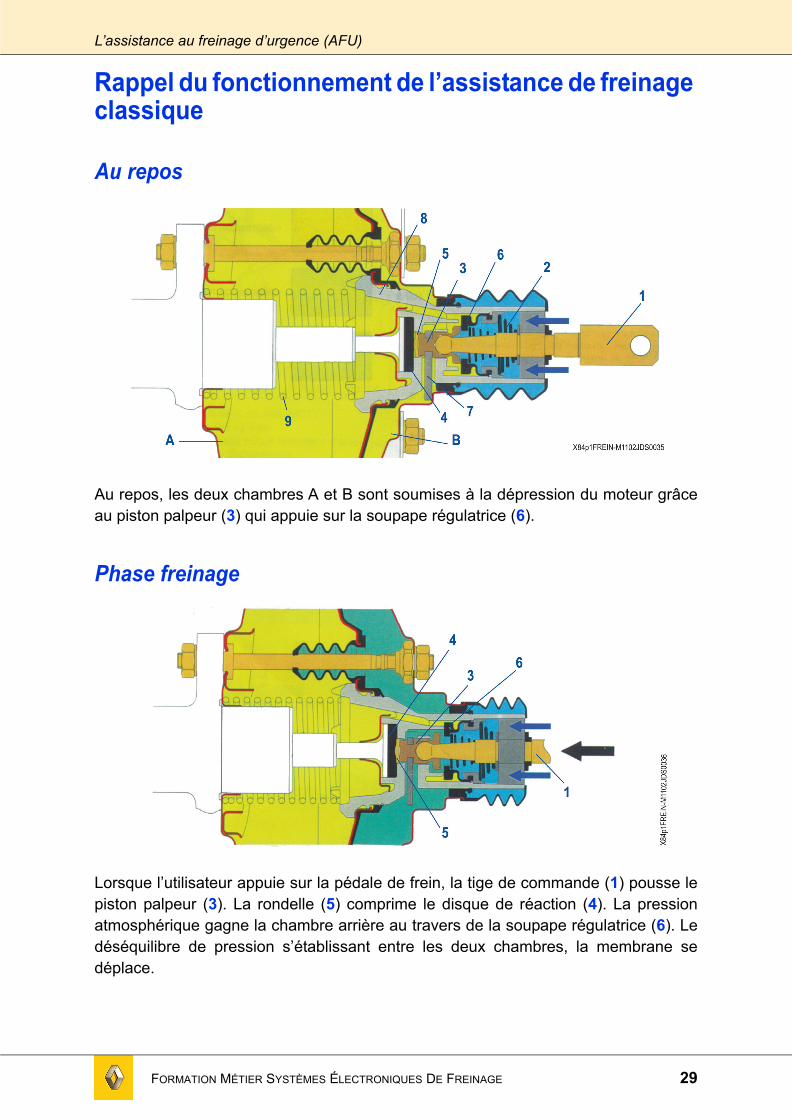
Au repos
Au repos, les deux chambres A et B sont soumises à la dépression du moteur grâceau piston palpeur (3) qui appuie sur la soupape régulatrice (6).
Phase freinage
Lorsque l’utilisateur appuie sur la pédale de frein, la tige de commande (1) pousse lepiston palpeur (3). La rondelle (5) comprime le disque de réaction (4). La pressionatmosphérique gagne la chambre arrière au travers de la soupape régulatrice (6). Ledéséquilibre de pression s’établissant entre les deux chambres, la membrane sedéplace.
L’assistance au freinage d’urgence (AFU)
30 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
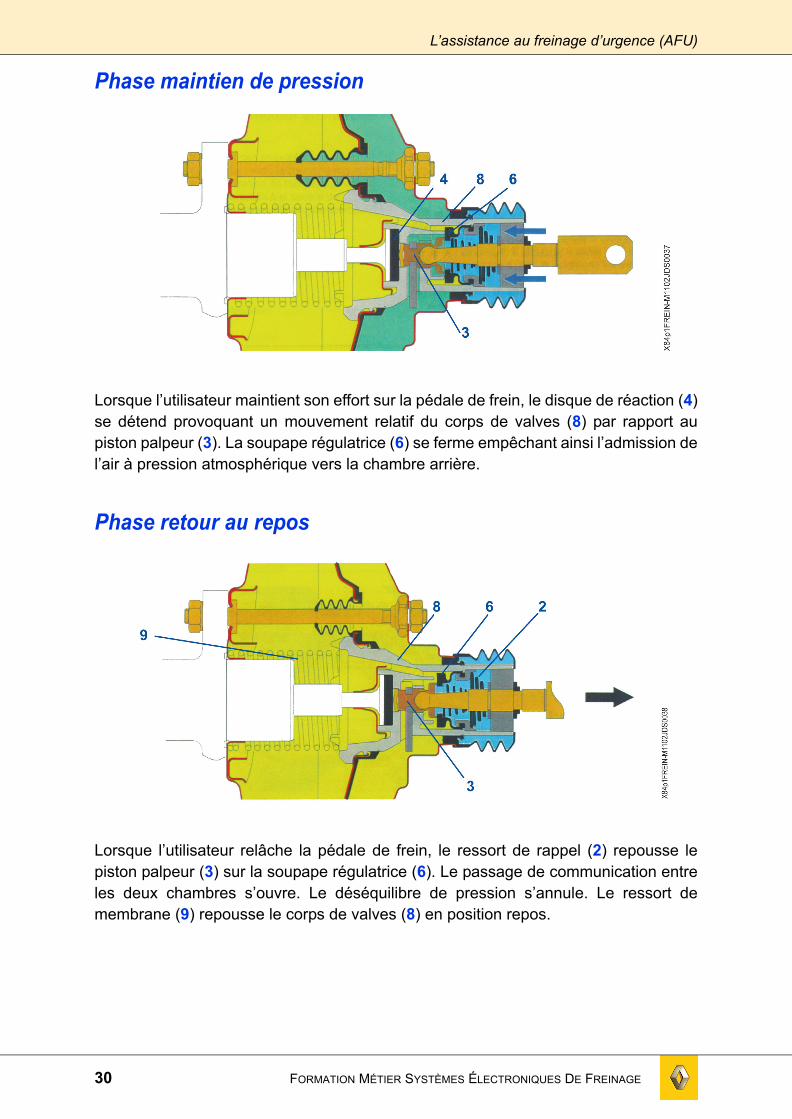
Phase maintien de pression
Lorsque l’utilisateur maintient son effort sur la pédale de frein, le disque de réaction (4)se détend provoquant un mouvement relatif du corps de valves (8) par rapport aupiston palpeur (3). La soupape régulatrice (6) se ferme empêchant ainsi l’admission del’air à pression atmosphérique vers la chambre arrière.
Phase retour au repos
Lorsque l’utilisateur relâche la pédale de frein, le ressort de rappel (2) repousse lepiston palpeur (3) sur la soupape régulatrice (6). Le passage de communication entreles deux chambres s’ouvre. Le déséquilibre de pression s’annule. Le ressort demembrane (9) repousse le corps de valves (8) en position repos.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 31
L’assistance au freinage d’urgence (AFU)
Principe de fonctionnement de l’AFUNous avons vu dans l’explication précédente que dès que l’utilisateur maintient l’effortde freinage, l’entrée de pression atmosphérique dans la chambre arrière cesse,limitant ainsi le couple d’assistance.
Le rôle de tous les systèmes (mécanique et électrique) est de maintenir ce clapetouvert indépendamment de l’effort exercé par l’utilisateur. De cette manière, lesystème s’affranchit de la manière d’appuyer sur la pédale de frein.
Quels que soient les systèmes, en cas de dysfonctionnement, il est nécessaire deremplacer l’assistance complète.
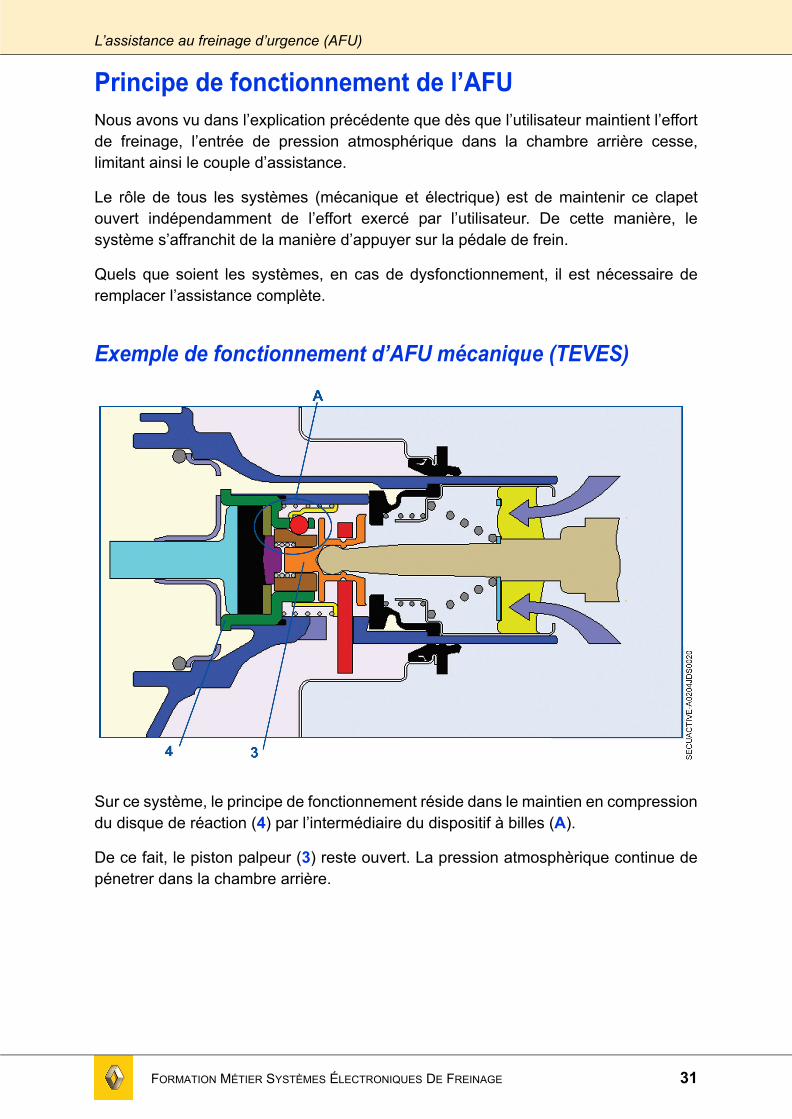
Exemple de fonctionnement d’AFU mécanique (TEVES)
Sur ce système, le principe de fonctionnement réside dans le maintien en compressiondu disque de réaction (4) par l’intermédiaire du dispositif à billes (A).
De ce fait, le piston palpeur (3) reste ouvert. La pression atmosphèrique continue depénetrer dans la chambre arrière.
L’assistance au freinage d’urgence (AFU)
32 FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE
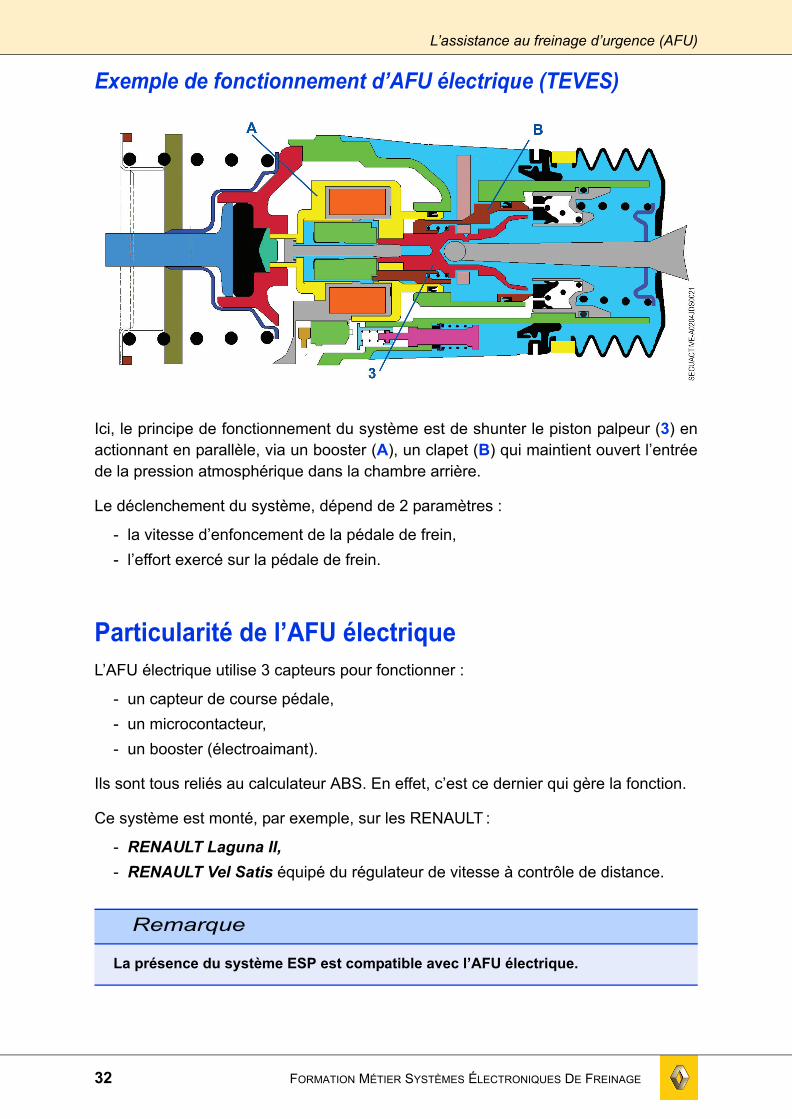
Exemple de fonctionnement d’AFU électrique (TEVES)
Ici, le principe de fonctionnement du système est de shunter le piston palpeur (3) enactionnant en parallèle, via un booster (A), un clapet (B) qui maintient ouvert l’entréede la pression atmosphérique dans la chambre arrière.
Le déclenchement du système, dépend de 2 paramètres :
- la vitesse d’enfoncement de la pédale de frein,- l’effort exercé sur la pédale de frein.
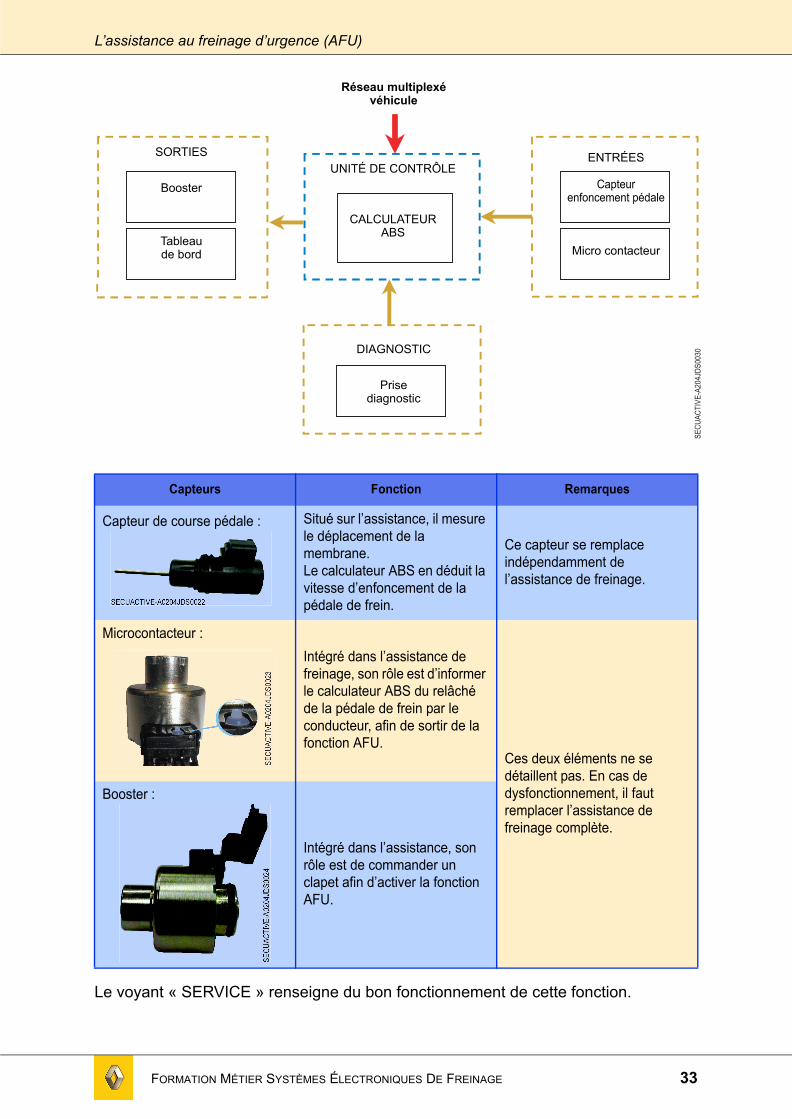
Particularité de l’AFU électriqueL’AFU électrique utilise 3 capteurs pour fonctionner :
- un capteur de course pédale,- un microcontacteur,- un booster (électroaimant).
Ils sont tous reliés au calculateur ABS. En effet, c’est ce dernier qui gère la fonction.
Ce système est monté, par exemple, sur les RENAULT :
- RENAULT Laguna II,- RENAULT Vel Satis équipé du régulateur de vitesse à contrôle de distance.
Remarque
La présence du système ESP est compatible avec l’AFU électrique.
FORMATION MÉTIER SYSTÈMES ÉLECTRONIQUES DE FREINAGE 33
L’assistance au freinage d’urgence (AFU)
Le voyant « SERVICE » renseigne du bon fonctionnement de cette fonction.
Capteurs Fonction Remarques
Capteur de course pédale : Situé sur l’assistance, il mesure le déplacement de la membrane.Le calculateur ABS en déduit la vitesse d’enfoncement de la pédale de frein.
Ce capteur se remplace indépendamment de l’assistance de freinage.
Microcontacteur :Intégré dans l’assistance de freinage, son rôle est d’informer le calculateur ABS du relâché de la pédale de frein par le conducteur, afin de sortir de la fonction AFU.
Ces deux éléments ne se détaillent pas. En cas de dysfonctionnement, il faut remplacer l’assistance de freinage complète.
Booster :
Intégré dans l’assistance, son rôle est de commander un clapet afin d’activer la fonction AFU.
SECUACTIVE-A204JDS0030
Réseau multiplexévéhicule
SORTIES
Booster
Tableaude bord
UNITÉ DE CONTRÔLE
CALCULATEURABS
ENTRÉES
Capteur enfoncement pédale
Micro contacteur
DIAGNOSTIC
Prise diagnostic

FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 35
LE SYSTÈME CONTRÔLE DYNAMIQUE DE CONDUITE (ESP)
LE SYSTÈME CONTRÔLE DYNAMIQUE DE CONDUITE (ESP)
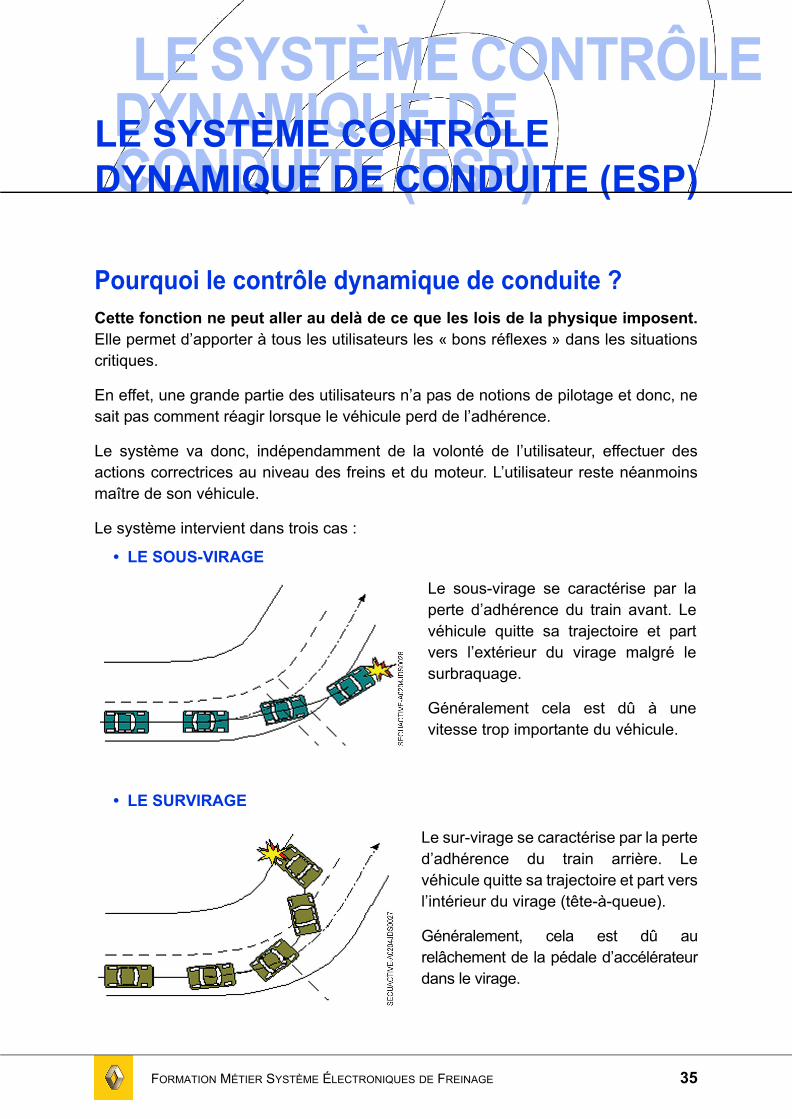
Pourquoi le contrôle dynamique de conduite ?Cette fonction ne peut aller au delà de ce que les lois de la physique imposent.Elle permet d’apporter à tous les utilisateurs les « bons réflexes » dans les situationscritiques.
En effet, une grande partie des utilisateurs n’a pas de notions de pilotage et donc, nesait pas comment réagir lorsque le véhicule perd de l’adhérence.
Le système va donc, indépendamment de la volonté de l’utilisateur, effectuer desactions correctrices au niveau des freins et du moteur. L’utilisateur reste néanmoinsmaître de son véhicule.
Le système intervient dans trois cas :
• LE SOUS-VIRAGE
• LE SURVIRAGE
Le sous-virage se caractérise par laperte d’adhérence du train avant. Levéhicule quitte sa trajectoire et partvers l’extérieur du virage malgré lesurbraquage.
Généralement cela est dû à unevitesse trop importante du véhicule.
Le sur-virage se caractérise par la perted’adhérence du train arrière. Levéhicule quitte sa trajectoire et part versl’intérieur du virage (tête-à-queue).
Généralement, cela est dû aurelâchement de la pédale d’accélérateurdans le virage.
Le système contrôle dynamique de conduite (ESP)
36 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
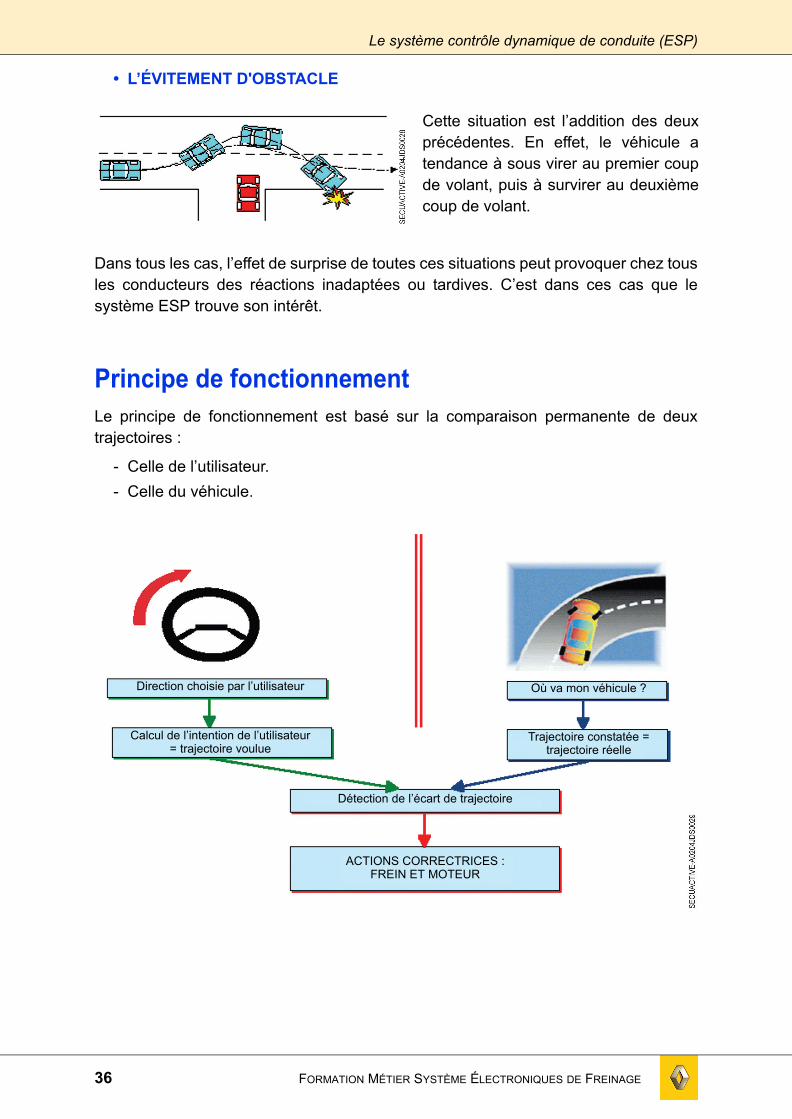
• L’ÉVITEMENT D'OBSTACLE
Dans tous les cas, l’effet de surprise de toutes ces situations peut provoquer chez tousles conducteurs des réactions inadaptées ou tardives. C’est dans ces cas que lesystème ESP trouve son intérêt.
Principe de fonctionnementLe principe de fonctionnement est basé sur la comparaison permanente de deuxtrajectoires :
- Celle de l’utilisateur.- Celle du véhicule.
Cette situation est l’addition des deuxprécédentes. En effet, le véhicule atendance à sous virer au premier coupde volant, puis à survirer au deuxièmecoup de volant.
Direction choisie par l’utilisateur
Calcul de l’intention de l’utilisateur = trajectoire voulue
Où va mon véhicule ?
Trajectoire constatée = trajectoire réelle
Détection de l’écart de trajectoire
ACTIONS CORRECTRICES : FREIN ET MOTEUR
FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 37
Le système contrôle dynamique de conduite (ESP)
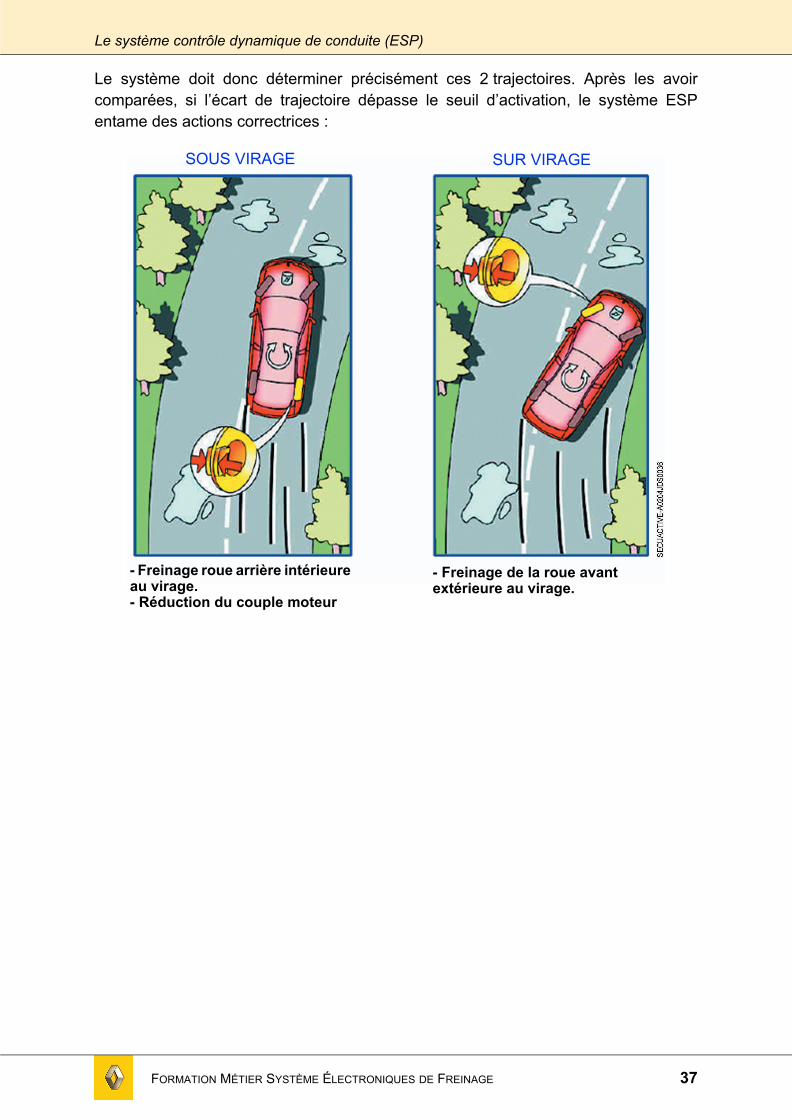
Le système doit donc déterminer précisément ces 2 trajectoires. Après les avoircomparées, si l’écart de trajectoire dépasse le seuil d’activation, le système ESPentame des actions correctrices :
SOUS VIRAGE SUR VIRAGE
- Freinage roue arrière intérieure au virage.- Réduction du couple moteur
- Freinage de la roue avant extérieure au virage.
Le système contrôle dynamique de conduite (ESP)
38 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
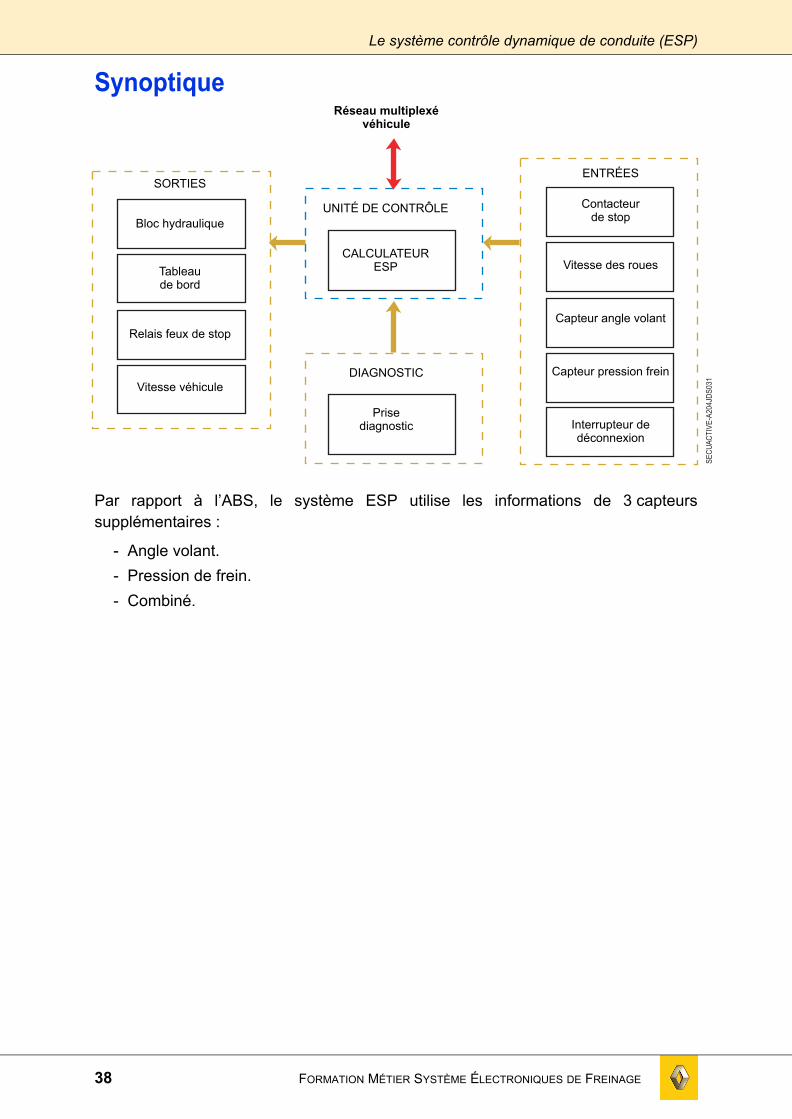
Synoptique
Par rapport à l’ABS, le système ESP utilise les informations de 3 capteurssupplémentaires :
- Angle volant.- Pression de frein.- Combiné.
SECUACTIVE-A204JDS031
Réseau multiplexévéhicule
SORTIES
Bloc hydraulique
Tableaude bord
Relais feux de stop
Vitesse véhicule
UNITÉ DE CONTRÔLE
CALCULATEURESP
ENTRÉES
Contacteur de stop
Vitesse des roues
Capteur angle volant
Capteur pression frein
Interrupteur de déconnexion
DIAGNOSTIC
Prise diagnostic

FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 39
Le système contrôle dynamique de conduite (ESP)
Le bloc ESP
Le bloc ESP (1) se compose de deux éléments :
- le calculateur (3),- le groupe hydraulique (2).
Suivant les modèles, ces éléments peuvent se remplacer indépendamment.
Ils sont différents de ceux du système ABS. Ils ne sont pas interchangeables.
2
3
1
Le système contrôle dynamique de conduite (ESP)
40 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
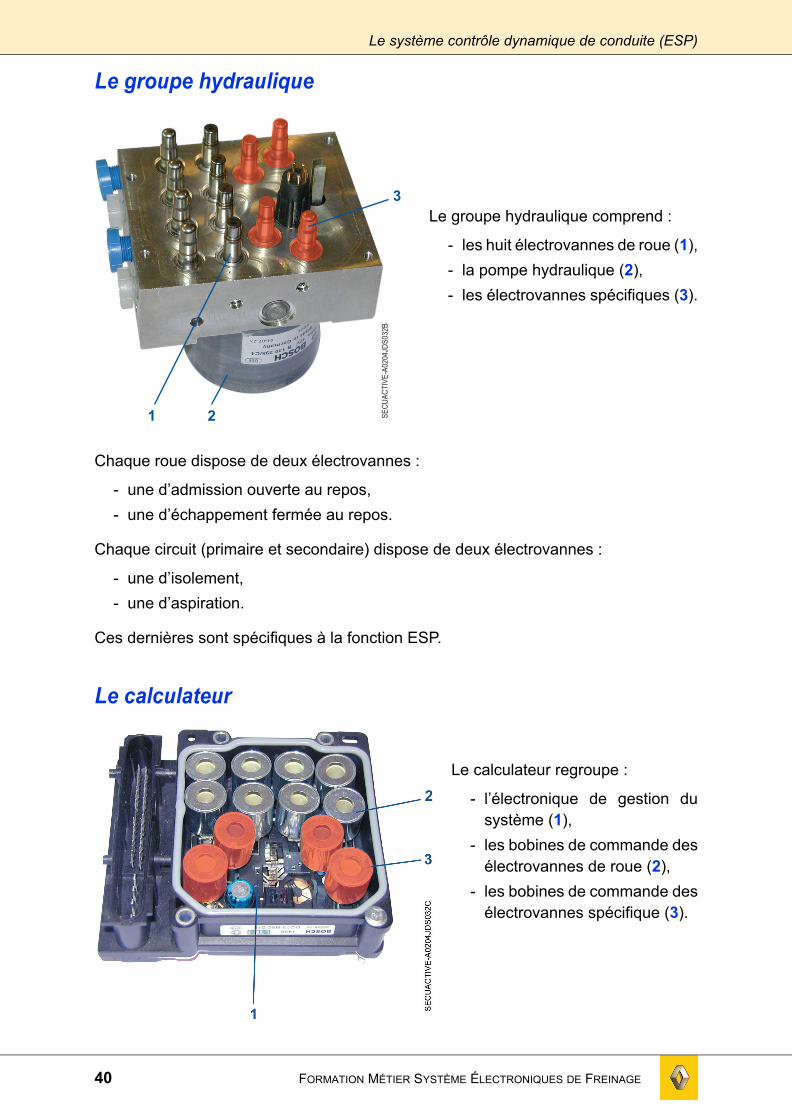
Le groupe hydraulique
Chaque roue dispose de deux électrovannes :
- une d’admission ouverte au repos,- une d’échappement fermée au repos.
Chaque circuit (primaire et secondaire) dispose de deux électrovannes :
- une d’isolement,- une d’aspiration.
Ces dernières sont spécifiques à la fonction ESP.
Le calculateur
1 2
3
SE
CU
AC
TIV
E-A
02
04
JD
S0
32
B
Le groupe hydraulique comprend :
- les huit électrovannes de roue (1),- la pompe hydraulique (2),- les électrovannes spécifiques (3).
Le calculateur regroupe :
- l’électronique de gestion dusystème (1),
- les bobines de commande desélectrovannes de roue (2),
- les bobines de commande desélectrovannes spécifique (3).
FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 41
Le système contrôle dynamique de conduite (ESP)
Le calculateur ESP dispose de toutes les fonctions précédemment évoquées :
- ABS,- REF,- MSR.
En plus, il dispose de la fonction ESP.
Les fonctions gérées par ce calculateur sont :
• Régulation de la pression de freinage
En fonction des informations reçues des capteurs :
- angle volant,- pression de frein,- combiné,
le calculateur ESP détermine l’écart de trajectoire entre celle voulue par le conducteuret celle réelle. Dès que celui-ci franchit le seuil, il commande alors les électrovannesdu groupe hydraulique.
• Surveillance des composants du système
A chaque mise du contact, le système pilote les 4 électrovannes spécifiques à lafonction ESP. Ensuite, dès que le véhicule dépasse une vitesse donnée (environ10 km/h), le calculateur pilote les 8 électrovannes et le moteur de pompe afin decontrôler le fonctionnement du groupe hydraulique.
Des vibrations à la pédale de frein sont perceptibles pendant ces contrôles.
• Mémorisation des défauts
Dès la mise du contact, le calculateur teste tous ses composants électroniques ainsique toutes les informations qu’il reçoit. Ceci provoque l’allumage du voyant ESP autableau de bord. Si aucun défaut n’est détecté, le voyant s’éteint 3 secondes plus tard.Dans le cas échéant, il reste allumé.
Quand le voyant est allumé, le calculateur ESP n’entame plus aucune actioncorrectrice.
Précautions pour le bon fonctionnement du systèmeEn cas de remplacement du calculateur ESP, il est nécessaire d’effectuer lesconfigurations décrites dans le Manuel de Réparation.
En cas de remplacement du bloc ESP, il est nécessaire, en plus des configurations,d’effectuer une purge du système.
Remarque
Le calculateur ESP gère aussi la fonction allumage des feux de détresse.
Le système contrôle dynamique de conduite (ESP)
42 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
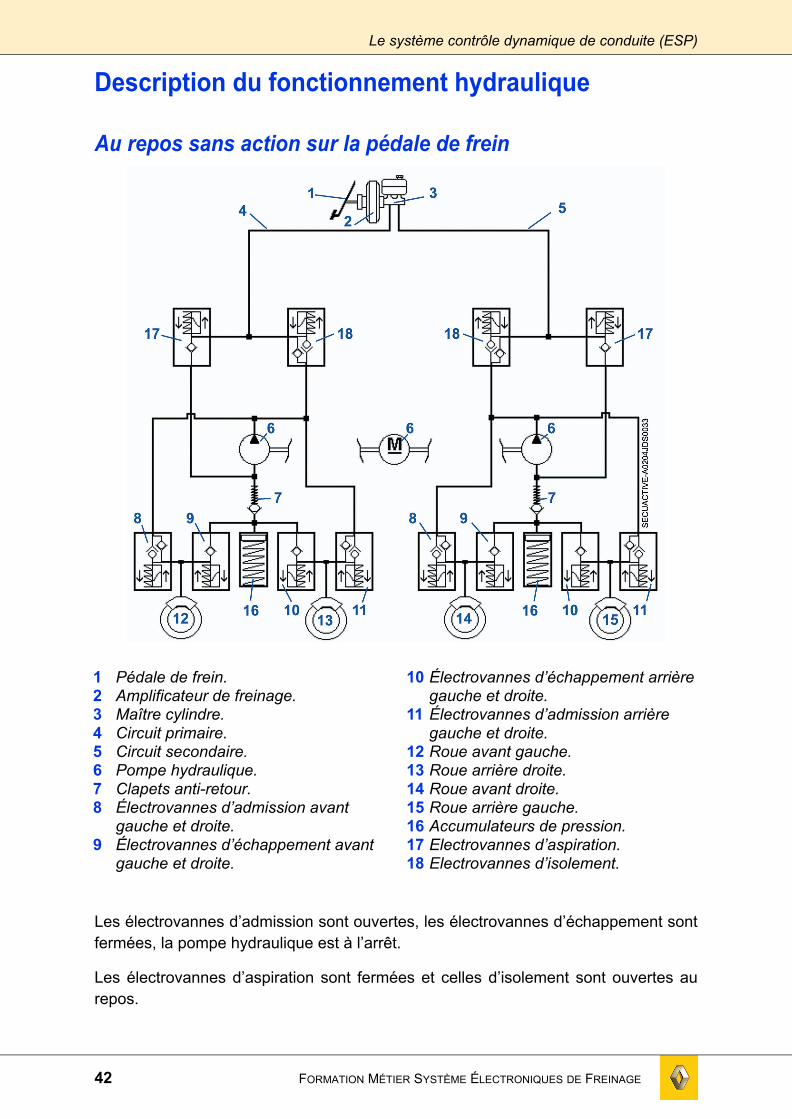
Description du fonctionnement hydraulique
Au repos sans action sur la pédale de frein
Les électrovannes d’admission sont ouvertes, les électrovannes d’échappement sontfermées, la pompe hydraulique est à l’arrêt.
Les électrovannes d’aspiration sont fermées et celles d’isolement sont ouvertes aurepos.
1 Pédale de frein.2 Amplificateur de freinage.3 Maître cylindre.4 Circuit primaire.5 Circuit secondaire.6 Pompe hydraulique.7 Clapets anti-retour.8 Électrovannes d’admission avant
gauche et droite.9 Électrovannes d’échappement avant
gauche et droite.
10 Électrovannes d’échappement arrière gauche et droite.
11 Électrovannes d’admission arrière gauche et droite.
12 Roue avant gauche.13 Roue arrière droite.14 Roue avant droite.15 Roue arrière gauche.16 Accumulateurs de pression.17 Electrovannes d’aspiration.18 Electrovannes d’isolement.
FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 43
Le système contrôle dynamique de conduite (ESP)
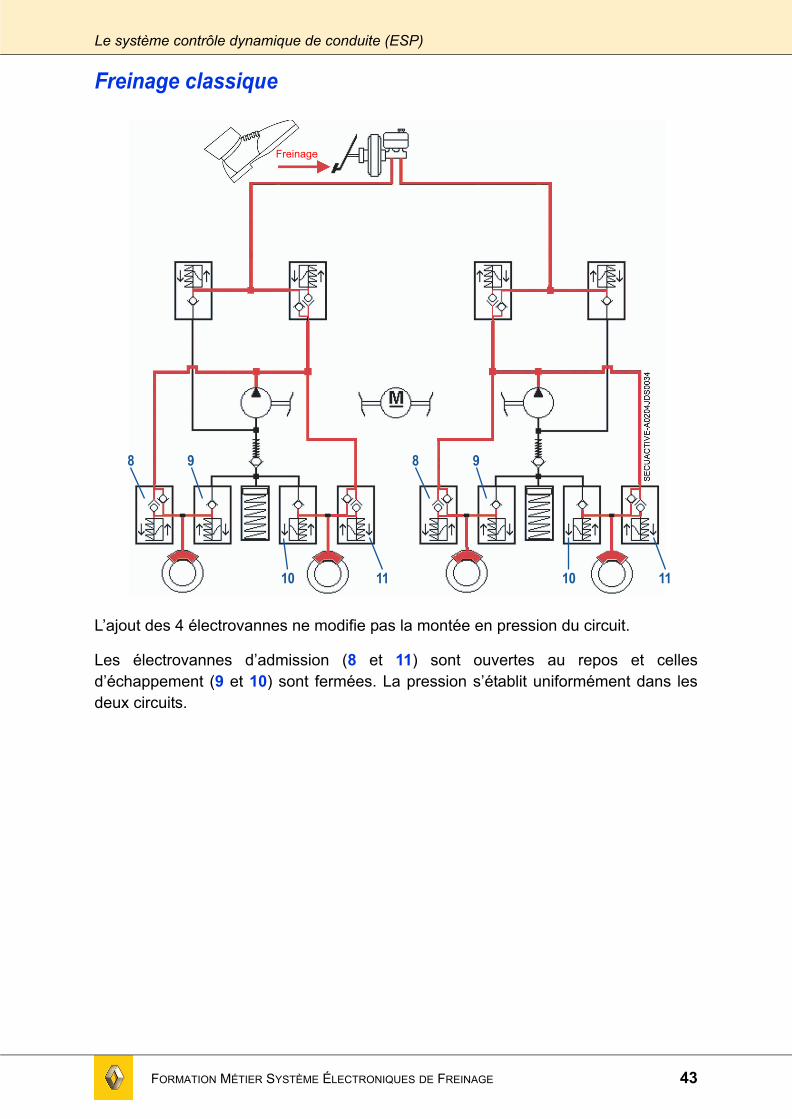
Freinage classique
L’ajout des 4 électrovannes ne modifie pas la montée en pression du circuit.
Les électrovannes d’admission (8 et 11) sont ouvertes au repos et cellesd’échappement (9 et 10) sont fermées. La pression s’établit uniformément dans lesdeux circuits.
8 9 98
11 10 1110
Freinage
Le système contrôle dynamique de conduite (ESP)
44 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
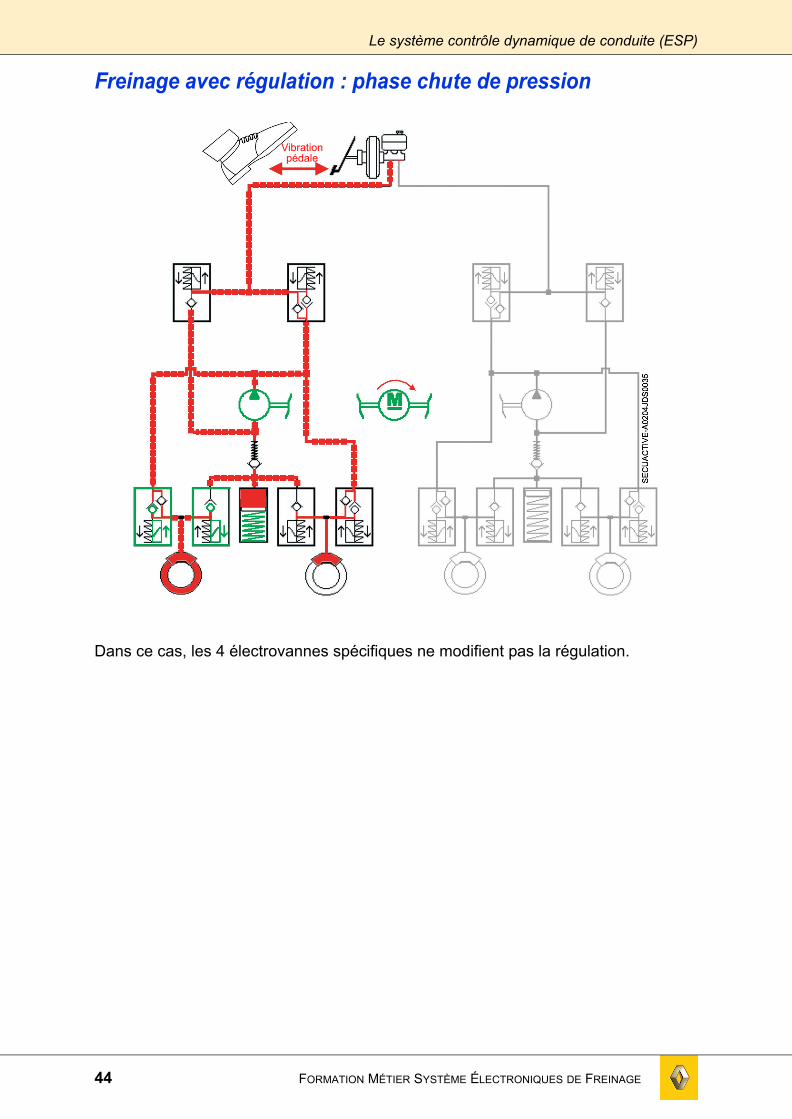
Freinage avec régulation : phase chute de pression
Dans ce cas, les 4 électrovannes spécifiques ne modifient pas la régulation.
Vibration pédale
FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 45
Le système contrôle dynamique de conduite (ESP)
Régulation ESP sans action sur la pédale de frein par l’utilisateur
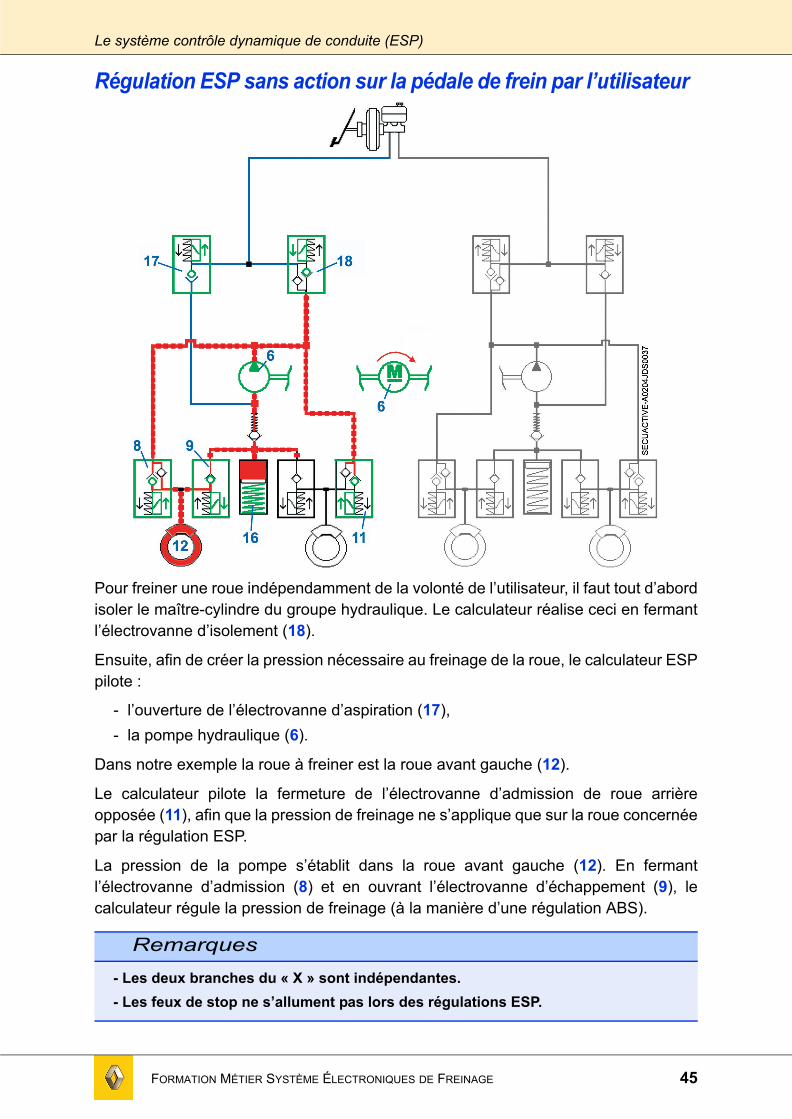
Pour freiner une roue indépendamment de la volonté de l’utilisateur, il faut tout d’abordisoler le maître-cylindre du groupe hydraulique. Le calculateur réalise ceci en fermantl’électrovanne d’isolement (18).
Ensuite, afin de créer la pression nécessaire au freinage de la roue, le calculateur ESPpilote :
- l’ouverture de l’électrovanne d’aspiration (17),- la pompe hydraulique (6).
Dans notre exemple la roue à freiner est la roue avant gauche (12).
Le calculateur pilote la fermeture de l’électrovanne d’admission de roue arrièreopposée (11), afin que la pression de freinage ne s’applique que sur la roue concernéepar la régulation ESP.
La pression de la pompe s’établit dans la roue avant gauche (12). En fermantl’électrovanne d’admission (8) et en ouvrant l’électrovanne d’échappement (9), lecalculateur régule la pression de freinage (à la manière d’une régulation ABS).
Remarques
- Les deux branches du « X » sont indépendantes.- Les feux de stop ne s’allument pas lors des régulations ESP.
Le système contrôle dynamique de conduite (ESP)
46 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
Régulation ESP avec action sur la pédale de freinpar l’utilisateur
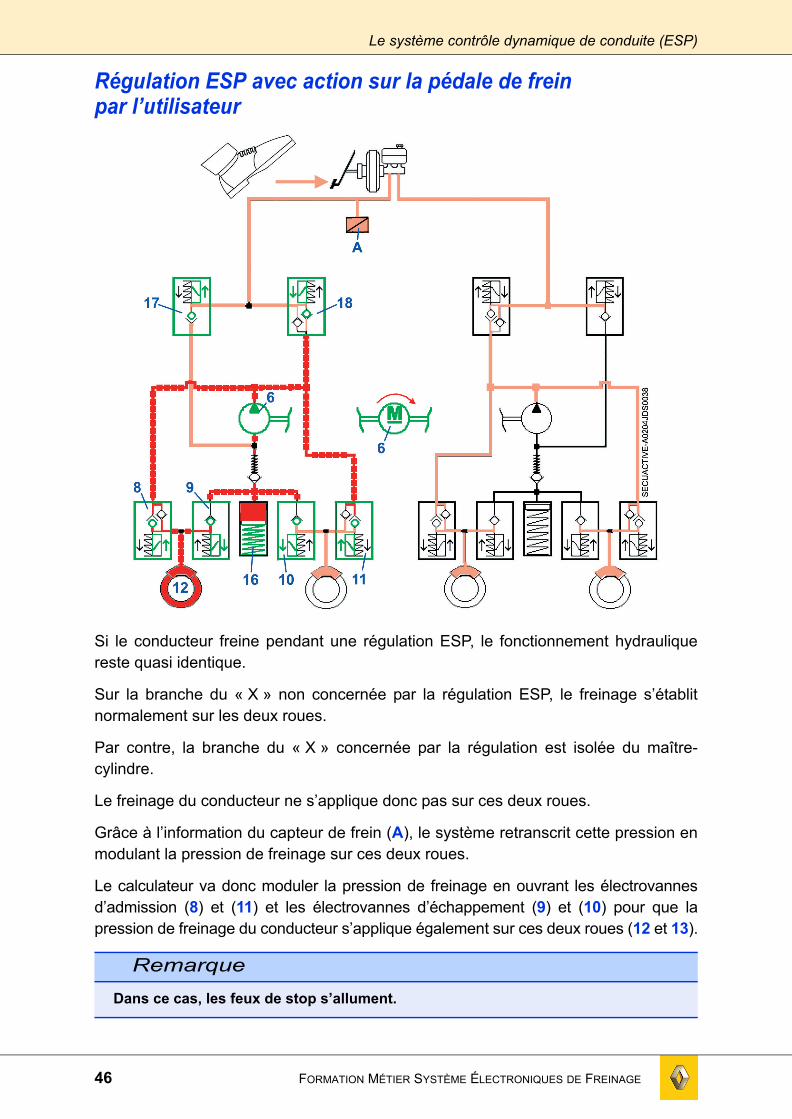
Si le conducteur freine pendant une régulation ESP, le fonctionnement hydrauliquereste quasi identique.
Sur la branche du « X » non concernée par la régulation ESP, le freinage s’établitnormalement sur les deux roues.
Par contre, la branche du « X » concernée par la régulation est isolée du maître-cylindre.
Le freinage du conducteur ne s’applique donc pas sur ces deux roues.
Grâce à l’information du capteur de frein (A), le système retranscrit cette pression enmodulant la pression de freinage sur ces deux roues.
Le calculateur va donc moduler la pression de freinage en ouvrant les électrovannesd’admission (8) et (11) et les électrovannes d’échappement (9) et (10) pour que lapression de freinage du conducteur s’applique également sur ces deux roues (12 et 13).
Remarque
Dans ce cas, les feux de stop s’allument.

FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 47
Le système contrôle dynamique de conduite (ESP)
Purge hydrauliqueEn cas de remplacement, les blocs hydrauliques sont livrés préremplis.
Pour assurer un bon fonctionnement hydraulique, il est nécessaire d’effectuer unepurge du système. La méthode est identique à celle des blocs hydraulique ABS.
Description du fonctionnement électriquePour activer une régulation ESP, le système doit connaître à tout moment la trajectoiresouhaitée par l’utilisateur et celle réelle du véhicule.
Pour cela, il reçoit les informations suivantes :
- Angle volant.- Vitesse de lacet.- Accélération transversale.
Ensuite, lors d’une régulation ESP, le système utilise l’information du capteur depression de frein.
Tous ces capteurs sont reliés au calculateur ESP.
Information angle volant Cette information permet au calculateur ESP de déterminer la volonté de l’utilisateur,la trajectoire souhaitée par celui-ci.
Cette information peut provenir soit :
- d’un capteur indépendant (1) (exemple : RENAULT Laguna II),- du calculateur de DAEV (2) (exemple : RENAULT Mégane II).
Dans certains cas, le capteur peut se remplacer seul (1), ou il est nécessaire deremplacer un élément complet (2).
Il est impératif d’utiliser du liquide de frein DOT 4 ESP pour assurer unfonctionnement optimal du système.
Le système contrôle dynamique de conduite (ESP)
48 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
En cas de remplacement, il est nécessaire d’effectuer un apprentissage du capteur.
Remarques
- Sur certains véhicules (exemple RENAULT Mégane II), suite au débranchementde la batterie, le voyant ESP s’allume.
- Il est nécessaire de tourner le volant d’une valeur spécifique (voir Manuel deRéparation) afin d’éteindre ce voyant.
Contrôles possibles :Capteur angle volant : - Alimentation.
- Apprentissage (outil de diagnostic).

FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 49
Le système contrôle dynamique de conduite (ESP)
Information vitesse de lacet et accélération transversaleCes informations permettent au calculateur de déterminer la trajectoire réelle duvéhicule.
A Capteur d’accélération transversale.B Capteur de vitesse de lacet.
Ces informations peuvent provenir soient :
- de deux capteurs différents (1) (exemple : RENAULT Laguna II),- d’un seul et même capteur (2) (exemple : RENAULT Mégane II), celui-ci est
appelé capteur combiné.
En cas de remplacement, il n’est pas nécessaire d’effectuer d’apprentissage de ces capteurs.
De plus, il faut respecter le sens de montage décrit dans les Manuels de Réparation.
Ces capteurs sont très fragiles. Il faut veiller à les manipuler avecprécautions.
Contrôles possibles :Capteur combiné : - Alimentation.
- Positionnement.

Le système contrôle dynamique de conduite (ESP)
50 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
Information pression de freinCette information permet au calculateur de déterminer un freinage de l’utilisateur lorsd’une régulation ESP.
Cette information provient d’un capteur :
- indépendant (1) (exemple : RENAULT Laguna II, Vel Satis),- intégré au groupe hydraulique ESP (2) (exemple : RENAULT Mégane II).
Lorsque celui-ci est intégré au groupe hydraulique, en cas de défaillance, il fautremplacer le bloc hydraulique complet.
.
Ce capteur est fragile. Il faut veiller à le manipuler avec précautions.
Contrôles possibles :Capteur pression de frein : - Alimentation.
- Outil de diagnostic.
FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 51
Le système contrôle dynamique de conduite (ESP)
Interrupteur de connexion/déconnexionL’interrupteur désactive les fonctions ESP et ASR (anti-patinage).
Situé sur le tableau de bord, il est relié directement au calculateur ESP.C’est un interrupteur impulsionnel. A chaque appui, le calculateur inhibeou active les fonctions.
Sur certains systèmes, la reconnexion est automatique au dessus de50 km/h.
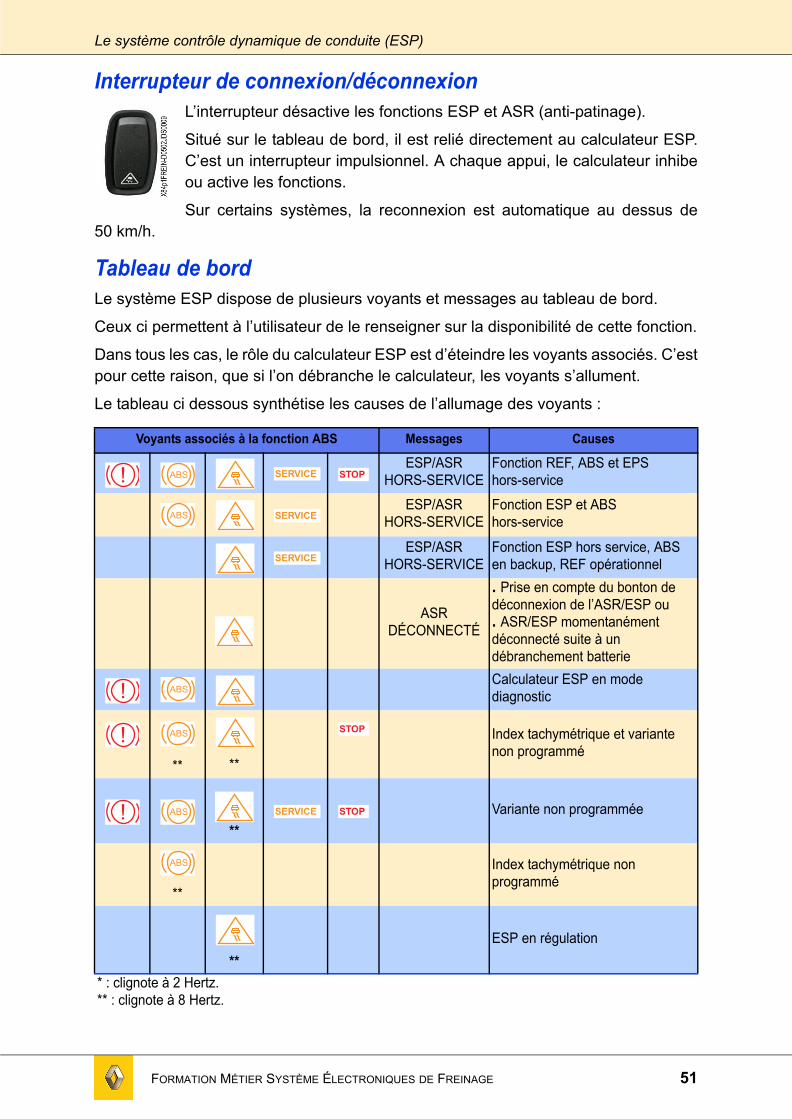
Tableau de bordLe système ESP dispose de plusieurs voyants et messages au tableau de bord.
Ceux ci permettent à l’utilisateur de le renseigner sur la disponibilité de cette fonction.
Dans tous les cas, le rôle du calculateur ESP est d’éteindre les voyants associés. C’estpour cette raison, que si l’on débranche le calculateur, les voyants s’allument.
Le tableau ci dessous synthétise les causes de l’allumage des voyants :
Voyants associés à la fonction ABS Messages Causes ESP/ASR
HORS-SERVICEFonction REF, ABS et EPS hors-service
ESP/ASR
HORS-SERVICEFonction ESP et ABS hors-service
ESP/ASR
HORS-SERVICEFonction ESP hors service, ABS en backup, REF opérationnel
ASR
DÉCONNECTÉ
. Prise en compte du bonton de déconnexion de l’ASR/ESP ou. ASR/ESP momentanément déconnecté suite à un débranchement batterie
Calculateur ESP en mode diagnostic
** **
Index tachymétrique et variante non programmé
**
Variante non programmée
**
Index tachymétrique non programmé
**ESP en régulation
* : clignote à 2 Hertz.** : clignote à 8 Hertz.
! ABS SERVICE STOP
ABS SERVICE
SERVICE
! ABS
! ABS STOP
! ABS SERVICE STOP
ABS
Le système contrôle dynamique de conduite (ESP)
52 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
Réseau multiplexéLe calculateur ESP communique avec plusieurs calculateurs tels que :
- Injection.
- Boîte de vitesses automatique.
- DAEV.
- Tableau de bord
Le calculateur ESP demande des réductions de couple au calculateur injection dansles cas de sous-virage.
Le calculateur ESP demande à la BVA de conserver le rapport engagé pendant toutela durée de la régulation.
Le calculateur ESP reçoit l’information angle volant de la DAEV.
Le calculateur ESP commande l’allumage des voyants au tableau de bord.
Particularité des véhicules ESP avec AFU électriqueSur les véhicules équipés des fonctions ESP et AFU électrique, le booster estcommandé lors d’une régulation ESP. Il permet de gaver la pompe à sa mise enmarche (précharge de 10 bars).
La pédale de frein descend, ouvrant ainsi le contacteur de stop. Pour ne pas allumerles feux de stop, le calculateur ESP pilote un relais de coupure des feux de stop.
Remarques
- Pour les véhicules équipés de boîtes de vitesses manuelles, en cas dechangement de rapport pendant une régulation, la demande de réduction decouple est inhibée.
- Le contacteur de la pédale d’embrayage informe du changement de rapport.

FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 53
Le Contrôle de Sous-Virage (CSV)Les ESP 2ème génération intègrent la prestation CSV. Cette prestation n’intervient quelors d’une correction en sous-virage. Ce système n’est qu’une extension du logicielESP.
Grâce à une lecture plus fine de l’écart de l’angle de dérive, via une électronique plusperformante, le CSV permet d’optimiser la correction en sous-virage.
Dorénavant, la correction en sous-virage est basée sur le ralentissement de la vitessedu véhicule. Ceci est réalisé par :
- la réduction du couple moteur,- le freinage de 2 ou 4 roues à des pressions différentes (fonction des systèmes).
Le freinage de plusieurs roues facilite le ralentissement de la vitesse du véhicule, touten conservant une meilleure stabilité.
Dans le cas d’un sous-virage, le système doitdéterminer l’angle de dérive du véhicule.
Lors d’un sous-virage, l’utilisateur a tendance àsurbraquer le volant par rapport au rayon duvirage. Le véhicule, quant à lui, continue dedériver.
En comparant la trajectoire réelle et cellesouhaitée, le calculateur en déduit cet angle.Plus ce dernier est élevé, plus la correction doitêtre importante.
LES PRESTATIONS COMPLÉMENTAIRES DU SYSTÈME ESPLES PRESTATIONS COMPLÉMEN-
TAIRES DU SYSTÈME ESP
Les prestations complémentaires du système ESP
54 FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE
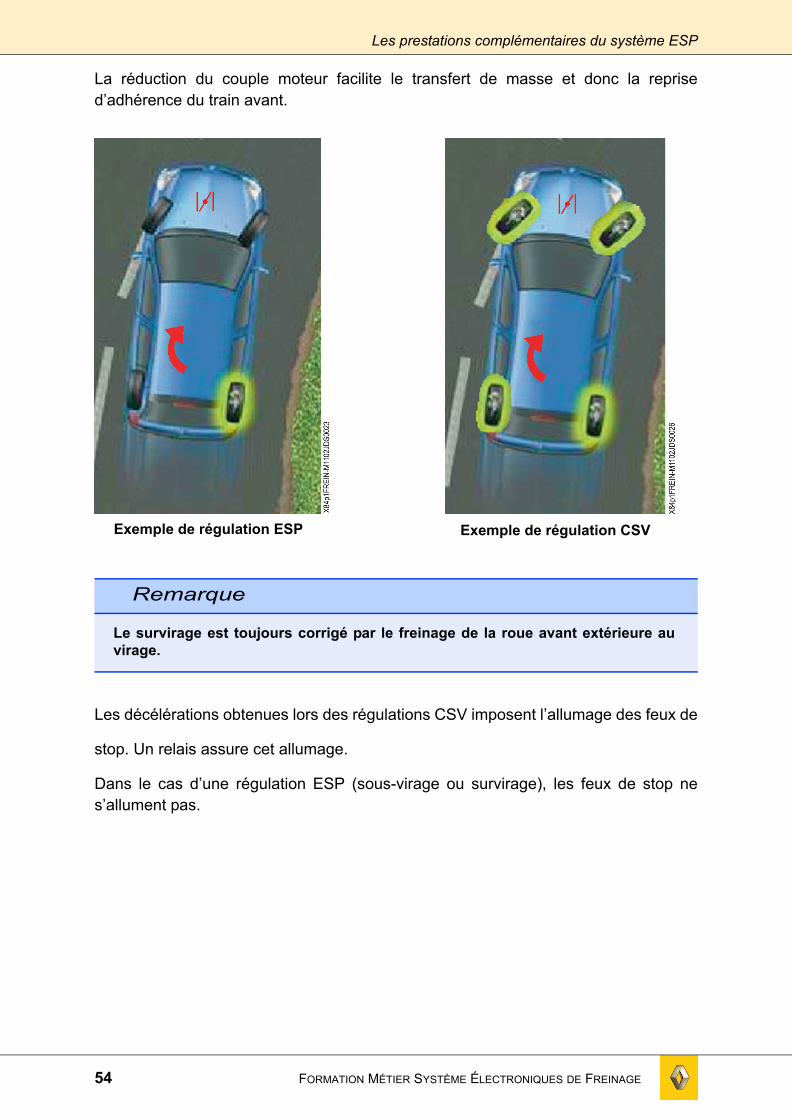
La réduction du couple moteur facilite le transfert de masse et donc la reprised’adhérence du train avant.
Les décélérations obtenues lors des régulations CSV imposent l’allumage des feux de
stop. Un relais assure cet allumage.
Dans le cas d’une régulation ESP (sous-virage ou survirage), les feux de stop nes’allument pas.
Remarque
Le survirage est toujours corrigé par le freinage de la roue avant extérieure auvirage.
Exemple de régulation ESP Exemple de régulation CSV
FORMATION MÉTIER SYSTÈME ÉLECTRONIQUES DE FREINAGE 55
Les prestations complémentaires du système ESP
La fonction anti-patinage (ASR)
Il faut distinguer deux types de patinage :
- Le patinage sur sol à adhérence symétrique (les roues motrices sur le mêmerevêtement).
- Le patinage sur sol à adhérence asymétrique (les roues motrices sur desrevêtements différents).
Avec adhérence symétriqueDans ce cas, les deux roues tournent à la même vitesse. Le calculateur ESP demandeune diminution du couple moteur au calculateur d’injection. Cette demande estmaintenue jusqu’à ce que la motricité soit retrouvée.
Avec adhérence asymétriqueDans ce cas, les roues motrices ne tournent pas à la même vitesse (par exemple, uneroue sur le bitume et une roue sur l’herbe).
Le calculateur ESP freine la roue qui patine (à la manière d’une régulation ESP).
Il transfère le couple excédentaire, via le différentiel, à la roue ayant une meilleureadhérence.
Ensuite, il peut réduire le couple moteur, si l’action de freinage s’avère insuffisante.
Pour réaliser cette fonction, le calculateur ESP n’utilise que les capteurs de vitesse deroue.
Sur les véhicules équipés de la fonction anti-patinage, en cas de test enatelier, le fait d’entraîner une des roues motrices avec le moteur, va mettreen mouvement le véhicule. Il faut donc, lever les roues motrices (2 ou 4).
SANS ASR AVEC ASR