Embed Size (px)
Citation preview
Case-based modification for optimization agents: AGENT-OPT
Yong Sik Changa, Jae Kyu Leeb,*
a International Center for Electronic Commerce, 207-43, Cheongryang, Seoul 130-012, South KoreabGraduate School of Management, Korea Advanced Institute of Science and Technology, 207-43, Cheongryang, Seoul 130-012, South Korea
Abstract
For the effective implementation of an inter-organizational supply chain on the Web, many optimization model agents need
to be embedded in the distributed software agents. For instance, many suppliers make requests to a delivery scheduler who
manages a model warehouse at the e-hub. The scheduler deals with the scheduling of many truckers and each trucker’s agent
must have its own routing optimization models. Since the formulations in the model warehouse vary depending upon the
requirements, it is impossible to formulate all combinations in advance. Therefore, we need a case-based model modification
scheme that can generate the required formulation from the semantically specified requirement in the agent communication
language.
This research deals with the issues of the architecture of an optimization model agent system AGENT-OPT, modeling
request language in XML, optimization model representation in semantic-level objects using UNIK-OPT, a method of selecting
a base model, an optimization model modification language (OMML), and rule-based modification reasoning. The approach is
applied to the delivery scheduling to study the effect of base model selection policies on the modification effort. To determine
whether to start with a primitive model, full model, or the most similar model, we experimented with the sensitivity of proximity
to the primitive model on 24 cases and discovered the threshold for choosing the most efficient base model.
D 2003 Elsevier B.V. All rights reserved.
Keywords: Agent; Case-based model formulation; Optimization; Delivery scheduling; Supply chain
1. Introduction
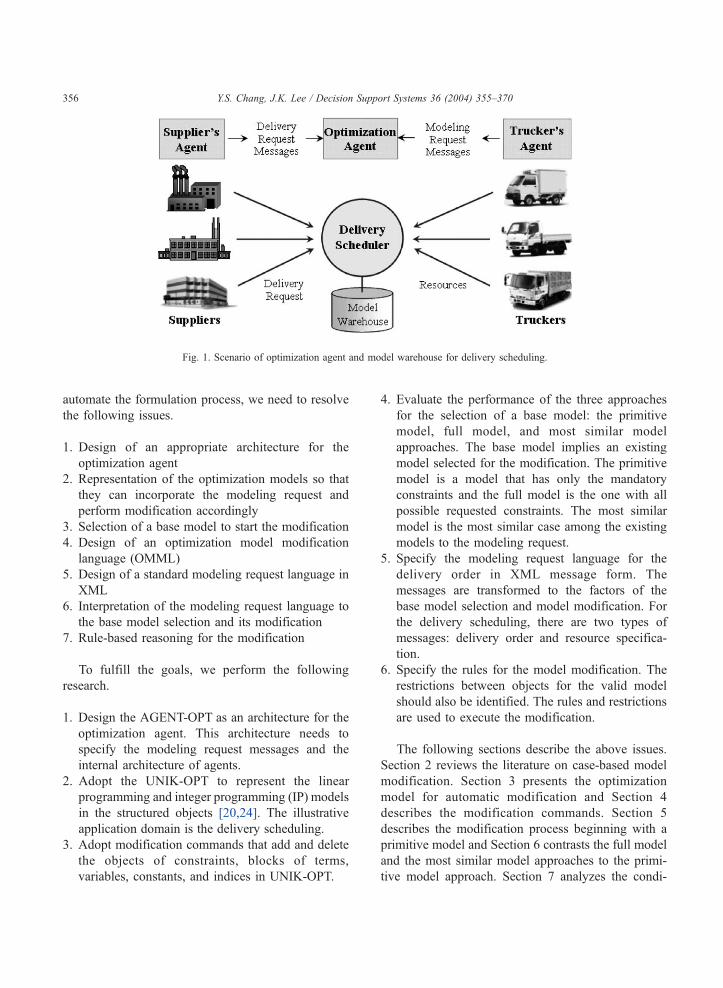
For the effective implementation of an inter-organ-
izational supply chain on the Web, many optimization
models need to be embedded in distributed software
agents. For instance, when there are many suppliers
that need delivery from a group of truckers, we need a
third party to schedule the optimal delivery for truck-
ers and suppliers. Since each delivery may have dif-
ferent requirements, the predefined models may not be
able to cover the variety of modeling requests from
the suppliers. Consequently, the third party delivery
scheduler needs to maintain a model warehouse [6]
with the capability to formulate the optimization
model based on the modeling request specified in
XML messages, see Fig. 1.
Since it is reasonable to assume that the scheduler
has some predefined models, we can apply the case-
based modification approach for the formulation of
models. Our primary concern here is how to automate
the modification process effectively and efficiently. To
0167-9236/$ - see front matter D 2003 Elsevier B.V. All rights reserved.
doi:10.1016/S0167-9236(03)00026-5
* Corresponding author. Tel.: +82-2-958-3612; fax: +82-2-960-
2102.
E-mail addresses: [email protected] (Y.S. Chang),
[email protected] (J.K. Lee).
www.elsevier.com/locate/dsw
Decision Support Systems 36 (2004) 355–370
automate the formulation process, we need to resolve
the following issues.
1. Design of an appropriate architecture for the
optimization agent
2. Representation of the optimization models so that
they can incorporate the modeling request and
perform modification accordingly
3. Selection of a base model to start the modification
4. Design of an optimization model modification
language (OMML)
5. Design of a standard modeling request language in
XML
6. Interpretation of the modeling request language to
the base model selection and its modification
7. Rule-based reasoning for the modification
To fulfill the goals, we perform the following
research.
1. Design the AGENT-OPT as an architecture for the
optimization agent. This architecture needs to
specify the modeling request messages and the
internal architecture of agents.
2. Adopt the UNIK-OPT to represent the linear
programming and integer programming (IP) models
in the structured objects [20,24]. The illustrative
application domain is the delivery scheduling.
3. Adopt modification commands that add and delete
the objects of constraints, blocks of terms,
variables, constants, and indices in UNIK-OPT.
4. Evaluate the performance of the three approaches
for the selection of a base model: the primitive
model, full model, and most similar model
approaches. The base model implies an existing
model selected for the modification. The primitive
model is a model that has only the mandatory
constraints and the full model is the one with all
possible requested constraints. The most similar
model is the most similar case among the existing
models to the modeling request.
5. Specify the modeling request language for the
delivery order in XML message form. The
messages are transformed to the factors of the
base model selection and model modification. For
the delivery scheduling, there are two types of
messages: delivery order and resource specifica-
tion.
6. Specify the rules for the model modification. The
restrictions between objects for the valid model
should also be identified. The rules and restrictions
are used to execute the modification.
The following sections describe the above issues.
Section 2 reviews the literature on case-based model
modification. Section 3 presents the optimization
model for automatic modification and Section 4
describes the modification commands. Section 5
describes the modification process beginning with a
primitive model and Section 6 contrasts the full model
and the most similar model approaches to the primi-
tive model approach. Section 7 analyzes the condi-
Fig. 1. Scenario of optimization agent and model warehouse for delivery scheduling.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370356

tions when an approach is most efficient. Section 8
describes the architecture of AGENT-OPT that adopts
the proposed approaches.
2. Literature on case-based model formulations
There is a considerable amount of research on
model management systems (MMS) [5,11] that sup-
ports the various phases of the modeling life-cycle.
The importance of MMS is resurrected as the necessity
for a model warehouse arises in the Web-based hub
[6]. Earlier research studied the representations of
models and the reasoning methods in order to map
specific problems with the model structure.
From the perspective of data and object manage-
ment, network data modeling [18], relational data
modeling [3], entity-relationship data modeling [4],
and object-oriented data modeling [14,21,30,35]
approaches were attempted. Liang proposed a frame-
work that included both relational and network con-
cepts [31]. On the other hand, from the perspective of
Artificial Intelligence, researchers adopted knowledge
representation techniques to represent models and
focused on automating the modeling processes. These
representations are based on predicate calculus [7],
semantic information net [11], knowledge abstraction
[9], first order logic [10,19], structured modeling
[12,13,36,38], rule-based formulation [23,28], and
frame [2,20,22,24].
It is very difficult to formulate a model from
scratch. It is reasonable, therefore, to modify the
existing models on the case-based reasoning approach.
Case-based planning was proposed by Vellore et al.
[39]. Modeling by analogy was researched by Blan-
ning [3], Ishikawa and Terano [15], Kedar-Cabelli
[16], Liang [32], Liang and Konsynski [34], and
Winston [40]. Both analogical and case-based reason-
ing methods rely on encapsulating episodic knowledge
to guide complex problem solving. The former empha-
sizes the process of modification, adaptation and
derivation, whereas the latter emphasizes the organ-
ization, hierarchy indexing and retrieval of case mem-
ory [8]. Modeling by analogy builds a new model
through feature mapping on conceptual, structural, and
functional similarities. However, it is not efficient
when modification of the model structure is required.
As Liang pointed out, this approach is relatively rigid
and the computational cost may be excessive partic-
ularly when large-scaled, because feature mapping is
theoretically NP-complete [33]. Instead of mapping a
new problem to the stored model counterpart, Binba-
sioglu [1] proposed the process analogy approach.
This approach designs a model without model struc-
ture modification from reusable model pieces. Never-
theless, it is rare for stored models to be reused without
structural modification.
Therefore, we need a more flexible and efficient
method that will automatically modify the models. In
this study, we adopt UNIK-OPT [24], which repre-
sents the optimization models—both the linear and
integer programming models—in structured objects.
Since the underlying design principle of UNIfied
Knowledge (UNIK) was the representation of opti-
mization models so as to integrate with rules [27], its
object-oriented representation is suitable for modifi-
cation. The earlier versionUNIK-LP, which focused on
the linear programming, did not assist the eXclusive
OR (XOR) relationship of variables and the IF–THEN
relationships between constraints. These higher-level
representations mean it should be extended to integer
programming models, thus the system UNIK-IP [41]
was developed. UNIK-RELAX [17] was also devel-
oped to identify the characteristics of model structure
and to plan the Lagrangian relaxation procedure to
solve IP models.
3. Representation of optimization model
formulation in objects
To apply the CBR approach to the optimization
model formulation, we need to represent the model
cases in such a way that they semantically understand
the modeling requests and modification commands.
UNIK-LP [24], a subsystem of UNIK-OPT for linear
programming, represents the model in objects seman-
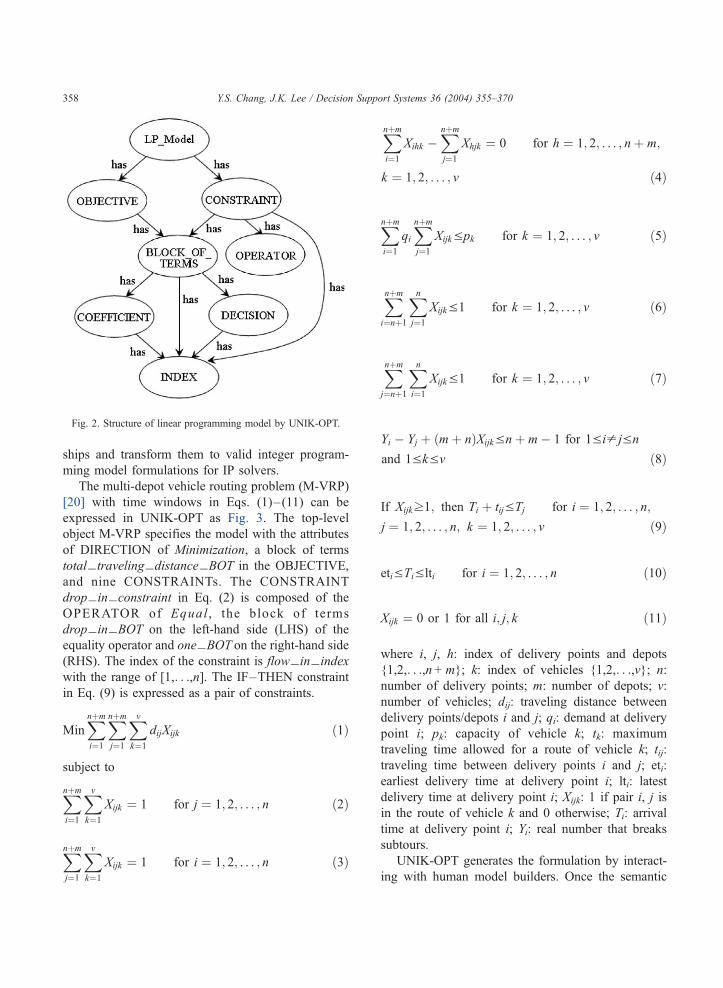
tically (see Fig. 2) and transforms them to mathemat-
ical notations and tabular form for solving. As a result,
UNIK-OPT is suitable for representing the CBR
approach.
The linear programming models can be extended to
IP by adopting the expressions like XOR and IF–
THEN relationships between variables and between
constraints. UNIK-IP [41], the extension of UNIK-LP
for integer programming, can express such relation-
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 357
ships and transform them to valid integer program-
ming model formulations for IP solvers.
The multi-depot vehicle routing problem (M-VRP)
[20] with time windows in Eqs. (1)–(11) can be
expressed in UNIK-OPT as Fig. 3. The top-level
object M-VRP specifies the model with the attributes
of DIRECTION of Minimization, a block of terms
total�traveling�distance�BOT in the OBJECTIVE,
and nine CONSTRAINTs. The CONSTRAINT
drop�in�constraint in Eq. (2) is composed of the
OPERATOR of Equal , the block of terms
drop�in�BOT on the left-hand side (LHS) of the
equality operator and one�BOT on the right-hand side
(RHS). The index of the constraint is flow�in�index
with the range of [1,. . .,n]. The IF–THEN constraint
in Eq. (9) is expressed as a pair of constraints.
MinXnþm
i¼1
Xnþm
j¼1
Xv
k¼1
dijXijk ð1Þ
subject to
Xnþm
i¼1
Xv
k¼1
Xijk ¼ 1 for j ¼ 1; 2; . . . ; n ð2Þ
Xnþm
j¼1
Xv
k¼1
Xijk ¼ 1 for i ¼ 1; 2; . . . ; n ð3Þ
Xnþm
i¼1
Xihk �Xnþm
j¼1
Xhjk ¼ 0 for h ¼ 1; 2; . . . ; nþ m;
k ¼ 1; 2; . . . ; v ð4Þ
Xnþm
i¼1
qiXnþm
j¼1
XijkVpk for k ¼ 1; 2; . . . ; v ð5Þ
Xnþm
i¼nþ1
Xn
j¼1
XijkV1 for k ¼ 1; 2; . . . ; v ð6Þ
Xnþm
j¼nþ1
Xn
i¼1
XijkV1 for k ¼ 1; 2; . . . ; v ð7Þ
Yi � Yj þ ðmþ nÞXijkVnþ m� 1 for 1Vi p jVn
and 1VkVv ð8Þ
If Xijkz1; then Ti þ tijVTj for i ¼ 1; 2; . . . ; n;
j ¼ 1; 2; . . . ; n; k ¼ 1; 2; . . . ; v ð9Þ
etiVTiVlti for i ¼ 1; 2; . . . ; n ð10Þ
Xijk ¼ 0 or 1 for all i; j; k ð11Þ
where i, j, h: index of delivery points and depots
{1,2,. . .,n+m}; k: index of vehicles {1,2,. . .,v}; n:
number of delivery points; m: number of depots; v:
number of vehicles; dij: traveling distance between
delivery points/depots i and j; qi: demand at delivery
point i; pk: capacity of vehicle k; tk: maximum
traveling time allowed for a route of vehicle k; tij:
traveling time between delivery points i and j; eti:
earliest delivery time at delivery point i; lti: latest
delivery time at delivery point i; Xijk: 1 if pair i, j is
in the route of vehicle k and 0 otherwise; Ti: arrival
time at delivery point i; Yi: real number that breaks
subtours.
UNIK-OPT generates the formulation by interact-
ing with human model builders. Once the semantic
Fig. 2. Structure of linear programming model by UNIK-OPT.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370358
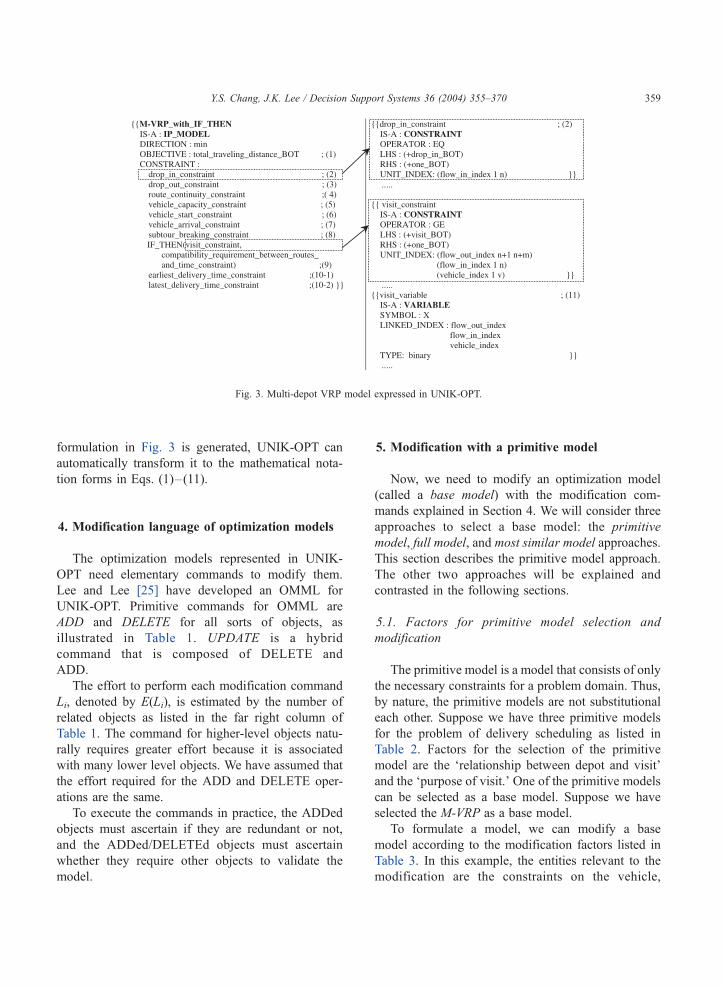
formulation in Fig. 3 is generated, UNIK-OPT can
automatically transform it to the mathematical nota-
tion forms in Eqs. (1)–(11).
4. Modification language of optimization models
The optimization models represented in UNIK-
OPT need elementary commands to modify them.
Lee and Lee [25] have developed an OMML for
UNIK-OPT. Primitive commands for OMML are
ADD and DELETE for all sorts of objects, as
illustrated in Table 1. UPDATE is a hybrid
command that is composed of DELETE and
ADD.
The effort to perform each modification command
Li, denoted by E(Li), is estimated by the number of
related objects as listed in the far right column of
Table 1. The command for higher-level objects natu-
rally requires greater effort because it is associated
with many lower level objects. We have assumed that
the effort required for the ADD and DELETE oper-
ations are the same.
To execute the commands in practice, the ADDed
objects must ascertain if they are redundant or not,
and the ADDed/DELETEd objects must ascertain
whether they require other objects to validate the
model.
5. Modification with a primitive model
Now, we need to modify an optimization model
(called a base model) with the modification com-
mands explained in Section 4. We will consider three
approaches to select a base model: the primitive
model, full model, and most similar model approaches.
This section describes the primitive model approach.
The other two approaches will be explained and
contrasted in the following sections.
5.1. Factors for primitive model selection and
modification
The primitive model is a model that consists of only
the necessary constraints for a problem domain. Thus,
by nature, the primitive models are not substitutional
each other. Suppose we have three primitive models
for the problem of delivery scheduling as listed in
Table 2. Factors for the selection of the primitive
model are the ‘relationship between depot and visit’
and the ‘purpose of visit.’ One of the primitive models
can be selected as a base model. Suppose we have
selected the M-VRP as a base model.
To formulate a model, we can modify a base
model according to the modification factors listed in
Table 3. In this example, the entities relevant to the
modification are the constraints on the vehicle,
Fig. 3. Multi-depot VRP model expressed in UNIK-OPT.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 359
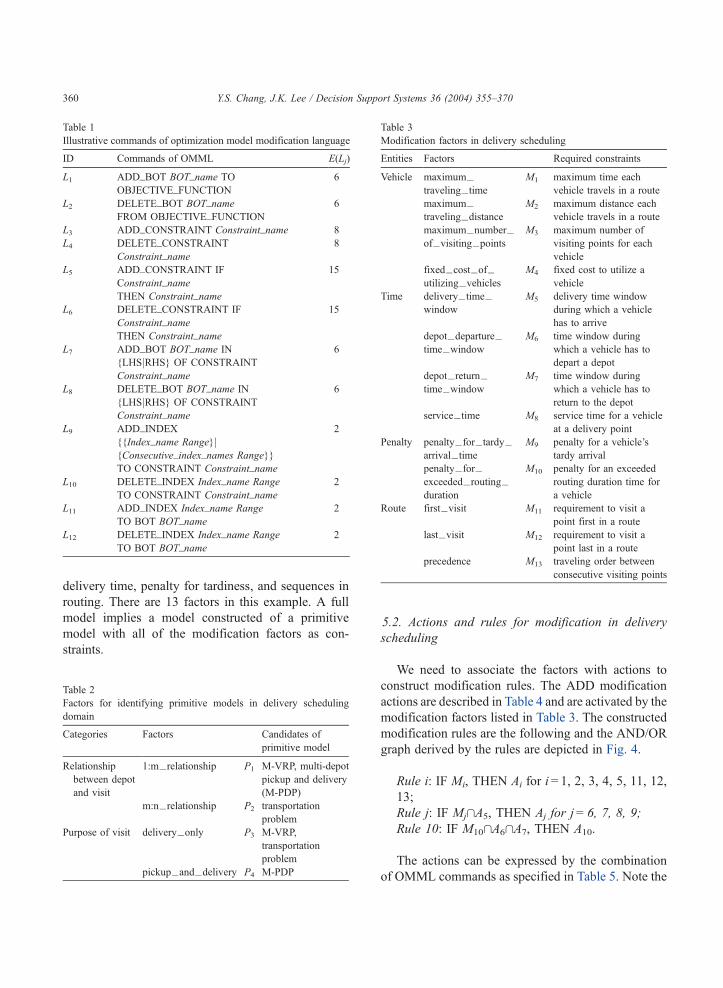
delivery time, penalty for tardiness, and sequences in
routing. There are 13 factors in this example. A full
model implies a model constructed of a primitive
model with all of the modification factors as con-
straints.
5.2. Actions and rules for modification in delivery
scheduling
We need to associate the factors with actions to
construct modification rules. The ADD modification
actions are described in Table 4 and are activated by the
modification factors listed in Table 3. The constructed
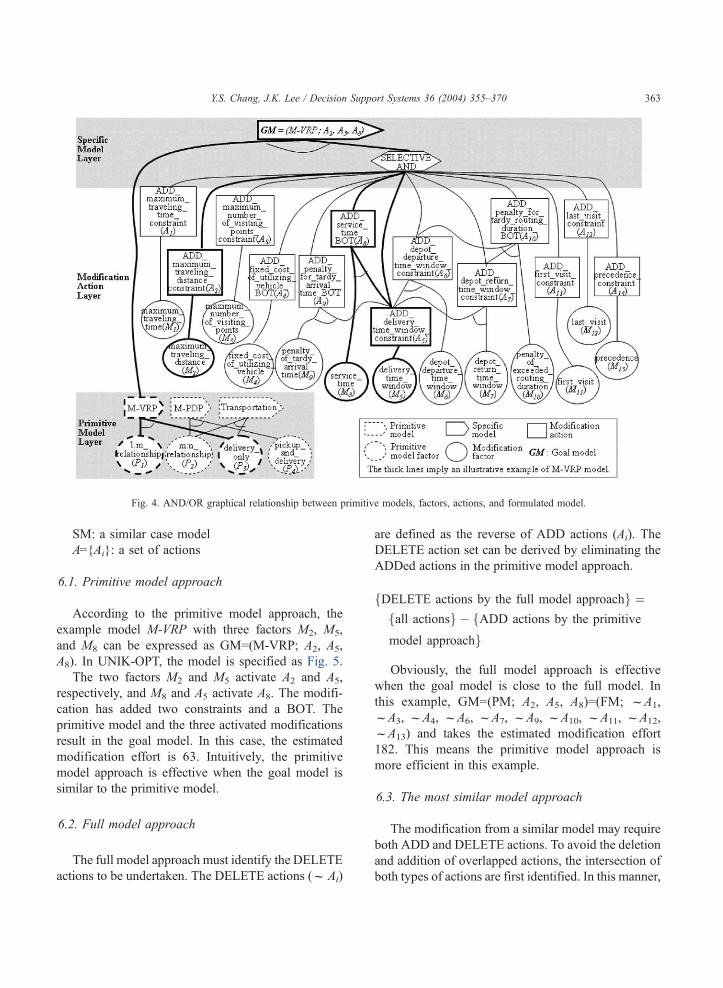
modification rules are the following and the AND/OR
graph derived by the rules are depicted in Fig. 4.
Rule i: IF Mi, THEN Ai for i = 1, 2, 3, 4, 5, 11, 12,
13;
Rule j: IF Mj\A5, THEN Aj for j = 6, 7, 8, 9;
Rule 10: IF M10\A6\A7, THEN A10.
The actions can be expressed by the combination
of OMML commands as specified in Table 5. Note the
Table 2
Factors for identifying primitive models in delivery scheduling
domain
Categories Factors Candidates of
primitive model
Relationship
between depot
and visit
1:m�relationship P1 M-VRP, multi-depot
pickup and delivery
(M-PDP)
m:n�relationship P2 transportation
problem
Purpose of visit delivery�only P3 M-VRP,
transportation
problem
pickup�and�delivery P4 M-PDP
Table 3
Modification factors in delivery scheduling
Entities Factors Required constraints
Vehicle maximum�traveling�time
M1 maximum time each
vehicle travels in a route
maximum�traveling�distance
M2 maximum distance each
vehicle travels in a route
maximum�number�of�visiting�points
M3 maximum number of
visiting points for each
vehicle
fixed�cost�of�utilizing�vehicles
M4 fixed cost to utilize a
vehicle
Time delivery�time�window
M5 delivery time window
during which a vehicle
has to arrive
depot�departure�time�window
M6 time window during
which a vehicle has to
depart a depot
depot�return�time�window
M7 time window during
which a vehicle has to
return to the depot
service�time M8 service time for a vehicle
at a delivery point
Penalty penalty�for�tardy�arrival�time
M9 penalty for a vehicle’s
tardy arrival
penalty�for�exceeded�routing�duration
M10 penalty for an exceeded
routing duration time for
a vehicle
Route first�visit M11 requirement to visit a
point first in a route
last�visit M12 requirement to visit a
point last in a route
precedence M13 traveling order between
consecutive visiting points
Table 1
Illustrative commands of optimization model modification language
ID Commands of OMML E(Lj)
L1 ADD_BOT BOT_name TO
OBJECTIVE_FUNCTION
6
L2 DELETE_BOT BOT_name
FROM OBJECTIVE_FUNCTION
6
L3 ADD_CONSTRAINT Constraint_name 8
L4 DELETE_CONSTRAINT
Constraint_name
8
L5 ADD_CONSTRAINT IF
Constraint_name
THEN Constraint_name
15
L6 DELETE_CONSTRAINT IF
Constraint_name
THEN Constraint_name
15
L7 ADD_BOT BOT_name IN
{LHSjRHS} OF CONSTRAINT
Constraint_name
6
L8 DELETE_BOT BOT_name IN
{LHSjRHS} OF CONSTRAINT
Constraint_name
6
L9 ADD_INDEX
{{Index_name Range}j{Consecutive_index_names Range}}
2
TO CONSTRAINT Constraint_name
L10 DELETE_INDEX Index_name Range
TO CONSTRAINT Constraint_name
2
L11 ADD_INDEX Index_name Range
TO BOT BOT_name
2
L12 DELETE_INDEX Index_name Range
TO BOT BOT_name
2
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370360
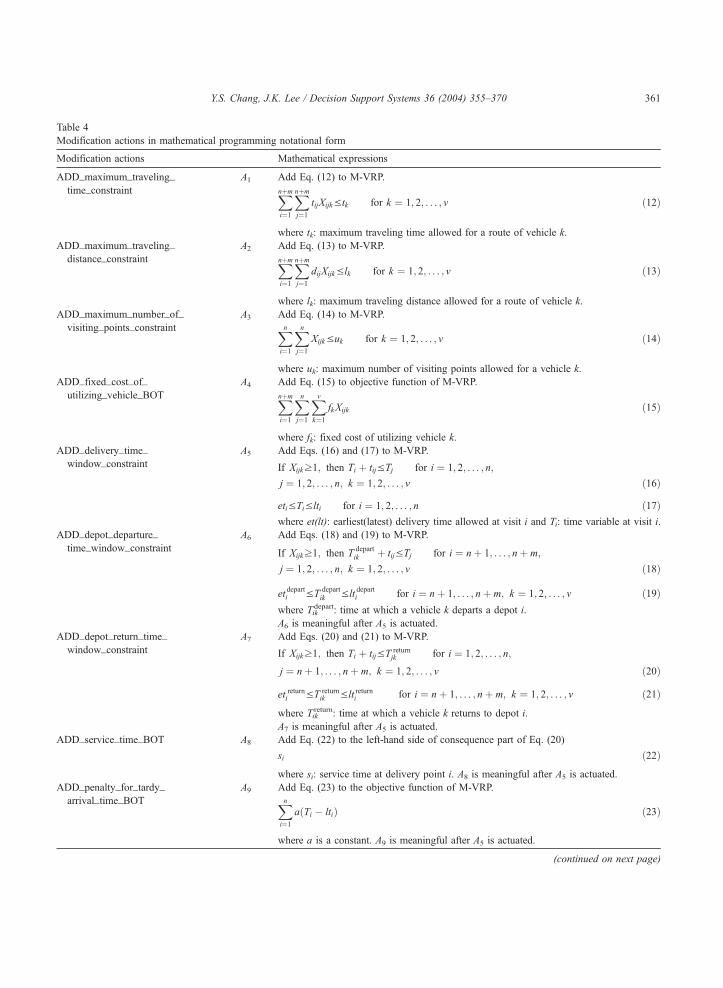
Table 4
Modification actions in mathematical programming notational form
Modification actions Mathematical expressions
ADD_maximum_traveling_ A1 Add Eq. (12) to M-VRP.
time_constraint Xnþm
i¼1
Xnþm
j¼1
tijXijkVtk for k ¼ 1; 2; . . . ; v ð12Þ
where tk: maximum traveling time allowed for a route of vehicle k.
ADD_maximum_traveling_ A2 Add Eq. (13) to M-VRP.
distance_constraint Xnþm
i¼1
Xnþm
j¼1
dijXijkVlk for k ¼ 1; 2; . . . ; v ð13Þ
where lk: maximum traveling distance allowed for a route of vehicle k.
ADD_maximum_number_of_ A3 Add Eq. (14) to M-VRP.
visiting_points_constraint Xn
i¼1
Xn
j¼1
XijkVuk for k ¼ 1; 2; . . . ; v ð14Þ
where uk: maximum number of visiting points allowed for a vehicle k.
ADD_fixed_cost_of_ A4 Add Eq. (15) to objective function of M-VRP.
utilizing_vehicle_BOT Xnþm
i¼1
Xn
j¼1
Xv
k¼1
fkXijk ð15Þ
where fk: fixed cost of utilizing vehicle k.
ADD_delivery_time_ A5 Add Eqs. (16) and (17) to M-VRP.
window_constraint If Xijkz1; then Ti þ tijVTj for i ¼ 1; 2; . . . ; n;
j ¼ 1; 2; . . . ; n; k ¼ 1; 2; . . . ; v ð16Þ
etiVTiVlti for i ¼ 1; 2; . . . ; n ð17Þwhere et(lt): earliest(latest) delivery time allowed at visit i and Ti: time variable at visit i.
ADD_depot_departure_ A6 Add Eqs. (18) and (19) to M-VRP.
time_window_constraintIf Xijkz1; then T
departik þ tijVTj for i ¼ nþ 1; . . . ; nþ m;
j ¼ 1; 2; . . . ; n; k ¼ 1; 2; . . . ; v ð18Þ
etdeparti VT
departik Vlt
departi for i ¼ nþ 1; . . . ; nþ m; k ¼ 1; 2; . . . ; v ð19Þ
where Tikdepart: time at which a vehicle k departs a depot i.
A6 is meaningful after A5 is actuated.
ADD_depot_return_time_ A7 Add Eqs. (20) and (21) to M-VRP.
window_constraint If Xijkz1; then Ti þ tijVT returnjk for i ¼ 1; 2; . . . ; n;
j ¼ nþ 1; . . . ; nþ m; k ¼ 1; 2; . . . ; v ð20Þ
et returni VT returnik Vlt returni for i ¼ nþ 1; . . . ; nþ m; k ¼ 1; 2; . . . ; v ð21Þ
where Tikreturn: time at which a vehicle k returns to depot i.
A7 is meaningful after A5 is actuated.
ADD_service_time_BOT A8 Add Eq. (22) to the left-hand side of consequence part of Eq. (20)
si ð22Þwhere si: service time at delivery point i. A8 is meaningful after A5 is actuated.
ADD_penalty_for_tardy_ A9 Add Eq. (23) to the objective function of M-VRP.
arrival_time_BOT Xn
i¼1
aðTi � ltiÞ ð23Þ
where a is a constant. A9 is meaningful after A5 is actuated.
(continued on next page)
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 361
estimated modification effort E(Ai), which is the sum
of associated E(Lj), marked in Table 5. The primitive
model layer, modification action layer, and specific
model layer are depicted in Fig. 4.
The total number of valid models that can be
generated by the modifications is the number of pos-
sible combinations of modification actions that do not
violate the restrictions between actions. In the M-VRP,
the primitive model can be modified to 2,418 models.
Suppose three modification factors (maximum
traveling distance, delivery time windows, and service
time) are selected as marked in Fig. 4. The formulated
models can be stored and used for future case-based
modifications.
6. The full model and most similar model
approaches
This section describes the next two approaches:
the full model and most similar model approaches.
The primitive model approach only adds constraints
(and associated objects). On the contrary, the full
model approach performs the deletion of constraints
and the most similar model approach may add and/or
delete the constraints. If there are conflicting con-
straints that cannot coexist, we need to generate more
than one full model. This can be a detriment to the
full model approach because we have to prepare all
combinations of full models in advance and select
one as a base model. Fortunately, however, in this
example, all modification factors can coexist because
one full model can generate the entire spectrum of
models.
In essence, we can apply the forward chaining
approach [33] from the base model. In addition, the
reasoning process must check the following restric-
tions:
1. Avoidance of redundancy: If the same objects
already exist, do not add them again.
2. Avoidance of conflict: If some constraints cannot
coexist, alert the model builder the conflict so that
he or she will reconsider the modeling factors.
3. Assurance of completeness: If a model has missing
constraints, BOTs, attributes, or indices, generate
the missing objects to complete and validate the
model [25].
Let us denote the model and actions as follows.
GM: goal model
PM: primitive model
FM: full model
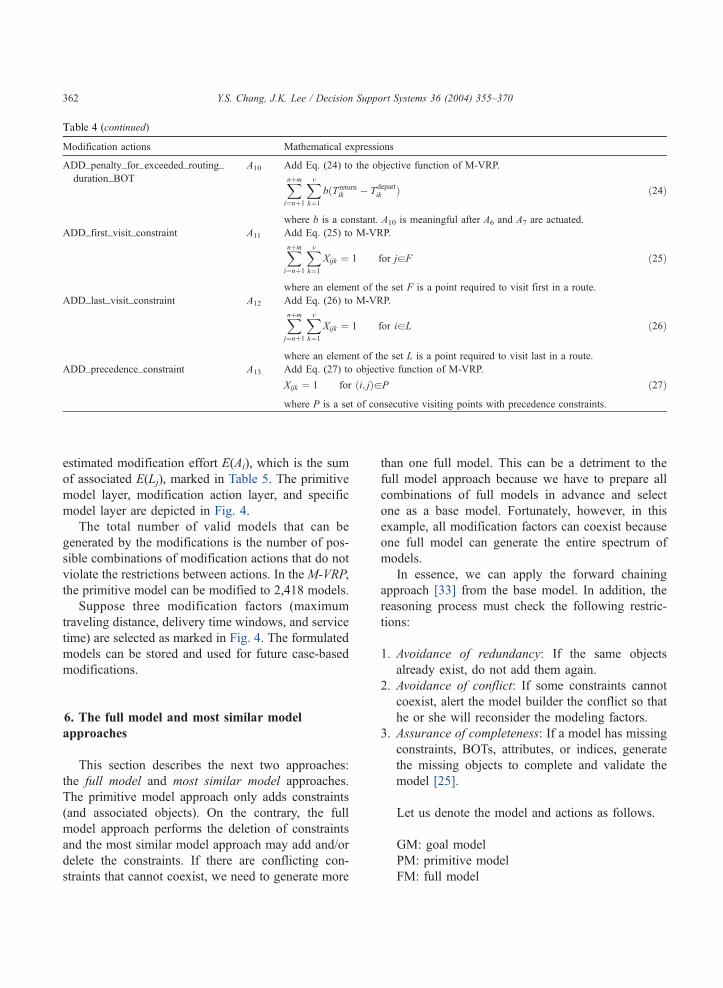
Table 4 (continued)
Modification actions Mathematical expressions
ADD_penalty_for_exceeded_routing_ A10 Add Eq. (24) to the objective function of M-VRP.
duration_BOT Xnþm
i¼nþ1
Xv
k¼1
bðT returnik � T
departik Þ ð24Þ
where b is a constant. A10 is meaningful after A6 and A7 are actuated.
ADD_first_visit_constraint A11 Add Eq. (25) to M-VRP.
Xnþm
i¼nþ1
Xv
k¼1
Xijk ¼ 1 for jaF ð25Þ
where an element of the set F is a point required to visit first in a route.
ADD_last_visit_constraint A12 Add Eq. (26) to M-VRP.
Xnþm
j¼nþ1
Xv
k¼1
Xijk ¼ 1 for iaL ð26Þ
where an element of the set L is a point required to visit last in a route.
ADD_precedence_constraint A13 Add Eq. (27) to objective function of M-VRP.
Xijk ¼ 1 for ði; jÞaP ð27Þ
where P is a set of consecutive visiting points with precedence constraints.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370362
SM: a similar case model
A={Ai}: a set of actions
6.1. Primitive model approach
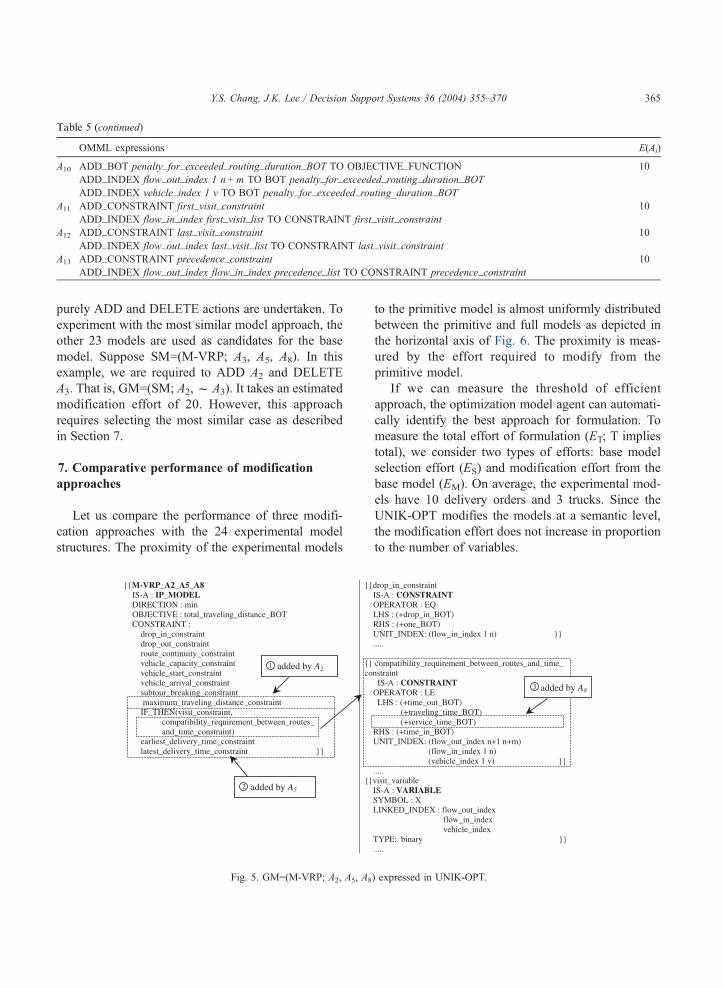
According to the primitive model approach, the
example model M-VRP with three factors M2, M5,
and M8 can be expressed as GM=(M-VRP; A2, A5,
A8). In UNIK-OPT, the model is specified as Fig. 5.
The two factors M2 and M5 activate A2 and A5,
respectively, and M8 and A5 activate A8. The modifi-
cation has added two constraints and a BOT. The
primitive model and the three activated modifications
result in the goal model. In this case, the estimated
modification effort is 63. Intuitively, the primitive
model approach is effective when the goal model is
similar to the primitive model.
6.2. Full model approach
The full model approach must identify the DELETE
actions to be undertaken. The DELETE actions (fAi)
are defined as the reverse of ADD actions (Ai). The
DELETE action set can be derived by eliminating the
ADDed actions in the primitive model approach.
fDELETE actions by the full model approachg ¼fall actionsg � fADD actions by the primitive
model approachg
Obviously, the full model approach is effective
when the goal model is close to the full model. In
this example, GM=(PM; A2, A5, A8)=(FM; fA1,
fA3, fA4, fA6, fA7, fA9, fA10, fA11, fA12,
fA13) and takes the estimated modification effort
182. This means the primitive model approach is
more efficient in this example.
6.3. The most similar model approach
The modification from a similar model may require
both ADD and DELETE actions. To avoid the deletion
and addition of overlapped actions, the intersection of
both types of actions are first identified. In this manner,
Fig. 4. AND/OR graphical relationship between primitive models, factors, actions, and formulated model.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 363
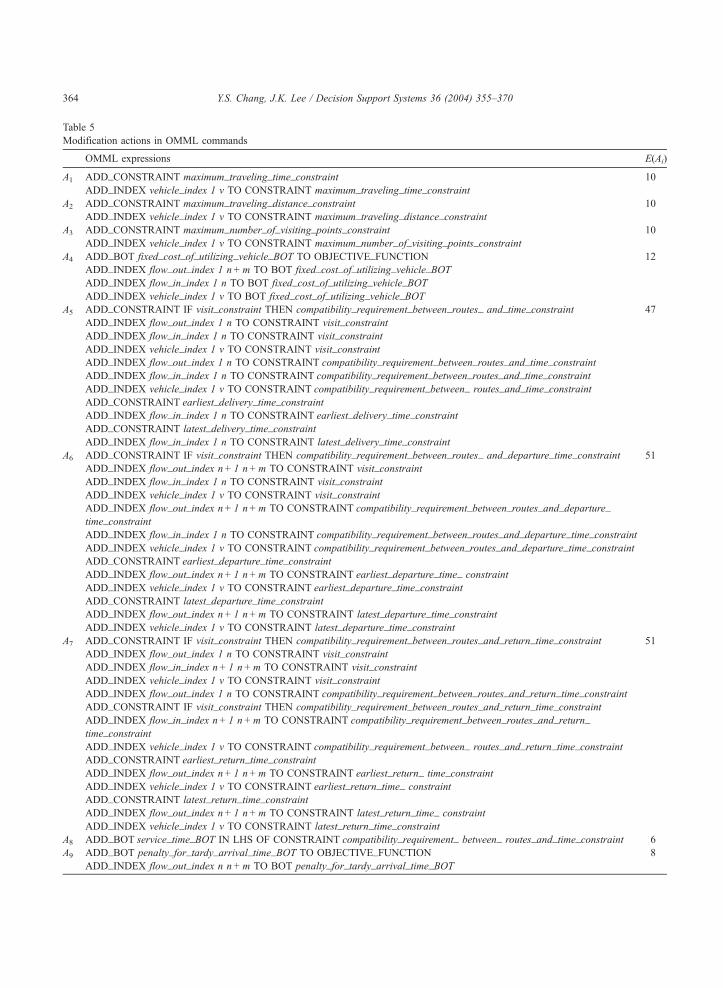
Table 5
Modification actions in OMML commands
OMML expressions E(Ai)
A1 ADD_CONSTRAINT maximum_traveling_time_constraint 10
ADD_INDEX vehicle_index 1 v TO CONSTRAINT maximum_traveling_time_constraint
A2 ADD_CONSTRAINT maximum_traveling_distance_constraint 10
ADD_INDEX vehicle_index 1 v TO CONSTRAINT maximum_traveling_distance_constraint
A3 ADD_CONSTRAINT maximum_number_of_visiting_points_constraint 10
ADD_INDEX vehicle_index 1 v TO CONSTRAINT maximum_number_of_visiting_points_constraint
A4 ADD_BOT fixed_cost_of_utilizing_vehicle_BOT TO OBJECTIVE_FUNCTION 12
ADD_INDEX flow_out_index 1 n+m TO BOT fixed_cost_of_utilizing_vehicle_BOT
ADD_INDEX flow_in_index 1 n TO BOT fixed_cost_of_utilizing_vehicle_BOT
ADD_INDEX vehicle_index 1 v TO BOT fixed_cost_of_utilizing_vehicle_BOT
A5 ADD_CONSTRAINT IF visit_constraint THEN compatibility_requirement_between_routes_ and_time_constraint 47
ADD_INDEX flow_out_index 1 n TO CONSTRAINT visit_constraint
ADD_INDEX flow_in_index 1 n TO CONSTRAINT visit_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT visit_constraint
ADD_INDEX flow_out_index 1 n TO CONSTRAINT compatibility_requirement_between_routes_and_time_constraint
ADD_INDEX flow_in_index 1 n TO CONSTRAINT compatibility_requirement_between_routes_and_time_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT compatibility_requirement_between_ routes_and_time_constraint
ADD_CONSTRAINT earliest_delivery_time_constraint
ADD_INDEX flow_in_index 1 n TO CONSTRAINT earliest_delivery_time_constraint
ADD_CONSTRAINT latest_delivery_time_constraint
ADD_INDEX flow_in_index 1 n TO CONSTRAINT latest_delivery_time_constraint
A6 ADD_CONSTRAINT IF visit_constraint THEN compatibility_requirement_between_routes_ and_departure_time_constraint 51
ADD_INDEX flow_out_index n+ 1 n+m TO CONSTRAINT visit_constraint
ADD_INDEX flow_in_index 1 n TO CONSTRAINT visit_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT visit_constraint
ADD_INDEX flow_out_index n+ 1 n+m TO CONSTRAINT compatibility_requirement_between_routes_and_departure_
time_constraint
ADD_INDEX flow_in_index 1 n TO CONSTRAINT compatibility_requirement_between_routes_and_departure_time_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT compatibility_requirement_between_routes_and_departure_time_constraint
ADD_CONSTRAINT earliest_departure_time_constraint
ADD_INDEX flow_out_index n+ 1 n+m TO CONSTRAINT earliest_departure_time_ constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT earliest_departure_time_constraint
ADD_CONSTRAINT latest_departure_time_constraint
ADD_INDEX flow_out_index n+ 1 n+m TO CONSTRAINT latest_departure_time_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT latest_departure_time_constraint
A7 ADD_CONSTRAINT IF visit_constraint THEN compatibility_requirement_between_routes_and_return_time_constraint 51
ADD_INDEX flow_out_index 1 n TO CONSTRAINT visit_constraint
ADD_INDEX flow_in_index n+ 1 n+m TO CONSTRAINT visit_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT visit_constraint
ADD_INDEX flow_out_index 1 n TO CONSTRAINT compatibility_requirement_between_routes_and_return_time_constraint
ADD_CONSTRAINT IF visit_constraint THEN compatibility_requirement_between_routes_and_return_time_constraint
ADD_INDEX flow_in_index n+ 1 n+m TO CONSTRAINT compatibility_requirement_between_routes_and_return_
time_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT compatibility_requirement_between_ routes_and_return_time_constraint
ADD_CONSTRAINT earliest_return_time_constraint
ADD_INDEX flow_out_index n+ 1 n+m TO CONSTRAINT earliest_return_ time_constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT earliest_return_time_ constraint
ADD_CONSTRAINT latest_return_time_constraint
ADD_INDEX flow_out_index n+ 1 n+m TO CONSTRAINT latest_return_time_ constraint
ADD_INDEX vehicle_index 1 v TO CONSTRAINT latest_return_time_constraint
A8 ADD_BOT service_time_BOT IN LHS OF CONSTRAINT compatibility_requirement_ between_ routes_and_time_constraint 6
A9 ADD_BOT penalty_for_tardy_arrival_time_BOT TO OBJECTIVE_FUNCTION 8
ADD_INDEX flow_out_index n n+m TO BOT penalty_for_tardy_arrival_time_BOT
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370364
purely ADD and DELETE actions are undertaken. To
experiment with the most similar model approach, the
other 23 models are used as candidates for the base
model. Suppose SM=(M-VRP; A3, A5, A8). In this
example, we are required to ADD A2 and DELETE
A3. That is, GM=(SM; A2,fA3). It takes an estimated
modification effort of 20. However, this approach
requires selecting the most similar case as described
in Section 7.
7. Comparative performance of modification
approaches
Let us compare the performance of three modifi-
cation approaches with the 24 experimental model
structures. The proximity of the experimental models
to the primitive model is almost uniformly distributed
between the primitive and full models as depicted in
the horizontal axis of Fig. 6. The proximity is meas-
ured by the effort required to modify from the
primitive model.
If we can measure the threshold of efficient
approach, the optimization model agent can automati-
cally identify the best approach for formulation. To
measure the total effort of formulation (ET; T implies
total), we consider two types of efforts: base model
selection effort (ES) and modification effort from the
base model (EM). On average, the experimental mod-
els have 10 delivery orders and 3 trucks. Since the
UNIK-OPT modifies the models at a semantic level,
the modification effort does not increase in proportion
to the number of variables.
OMML expressions E(Ai)
A10 ADD_BOT penalty_for_exceeded_routing_duration_BOT TO OBJECTIVE_FUNCTION 10
ADD_INDEX flow_out_index 1 n+m TO BOT penalty_for_exceeded_routing_duration_BOT
ADD_INDEX vehicle_index 1 v TO BOT penalty_for_exceeded_routing_duration_BOT
A11 ADD_CONSTRAINT first_visit_constraint 10
ADD_INDEX flow_in_index first_visit_list TO CONSTRAINT first_visit_constraint
A12 ADD_CONSTRAINT last_visit_constraint 10
ADD_INDEX flow_out_index last_visit_list TO CONSTRAINT last_visit_constraint
A13 ADD_CONSTRAINT precedence_constraint 10
ADD_INDEX flow_out_index flow_in_index precedence_list TO CONSTRAINT precedence_constraint
Fig. 5. GM=(M-VRP; A2, A5, A8) expressed in UNIK-OPT.
Table 5 (continued)
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 365
7.1. Accuracy of the modification effort estimator
The modification effort is estimated by the number
of associated objects as defined in Table 4. To
empirically evaluate the actual effort, we have exe-
cuted the modification and measured the time in
seconds. The estimates and actual execution times
are fitted by a regression model and the resultant
correlation is very high with R2 = 0.992 for the prim-
itive model approach and 0.999 for the full model
approach. Consequently, the estimator is good enough
for the effort prediction.
7.2. Sensitivity of proximity
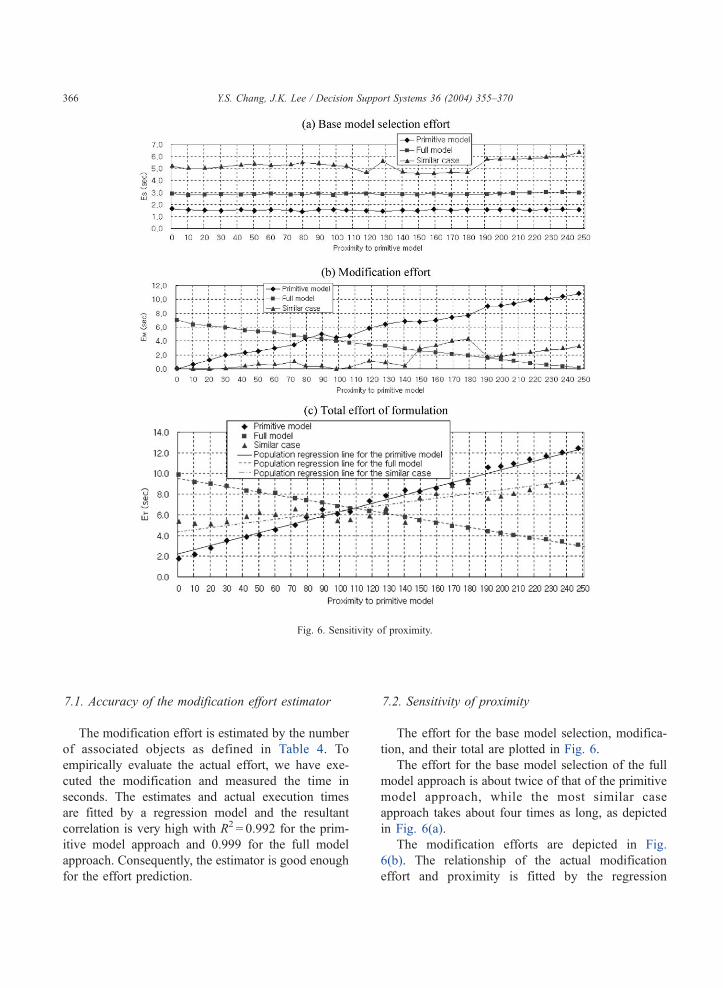
The effort for the base model selection, modifica-
tion, and their total are plotted in Fig. 6.
The effort for the base model selection of the full
model approach is about twice of that of the primitive
model approach, while the most similar case
approach takes about four times as long, as depicted
in Fig. 6(a).
The modification efforts are depicted in Fig.
6(b). The relationship of the actual modification
effort and proximity is fitted by the regression
Fig. 6. Sensitivity of proximity.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370366
model (28). The estimates are summarized in Table
6.
Actual EM ¼ aM þ bM Proximity ð28Þ
The primitive model approach has a positive trend
and the full model approach has a negative trend. The
t-value of the primitive model approach is 53.39 and
that of the full model approach is � 137.71. Thus, the
trends are statistically significant at the 1% level. Note
that the most similar case approach also has a positive
trend, which implies that as the complexity of con-
straints increases, the modification effort even from
the most similar case increases.
The total efforts are depicted in Fig. 6(c). In this
example, the most similar case approach is partially
dominated by the other two approaches at near prox-
imity 100. For the goal models, whose proximity is
less than 107.3, the primitive model approach outper-
forms the most similar case approach. Otherwise, the
full model approach outperforms the others. Accord-
ing to this, the primitive model approach performs best
for the model GM=(M-VRP; A2, A5, A8). The perform-
ance pattern may differ depending upon the applica-
tion domains. We need, therefore, to study the
threshold with experimental data in advance or learn
while using for each application domain. The benefit
increases as the scale of model warehouse expands.
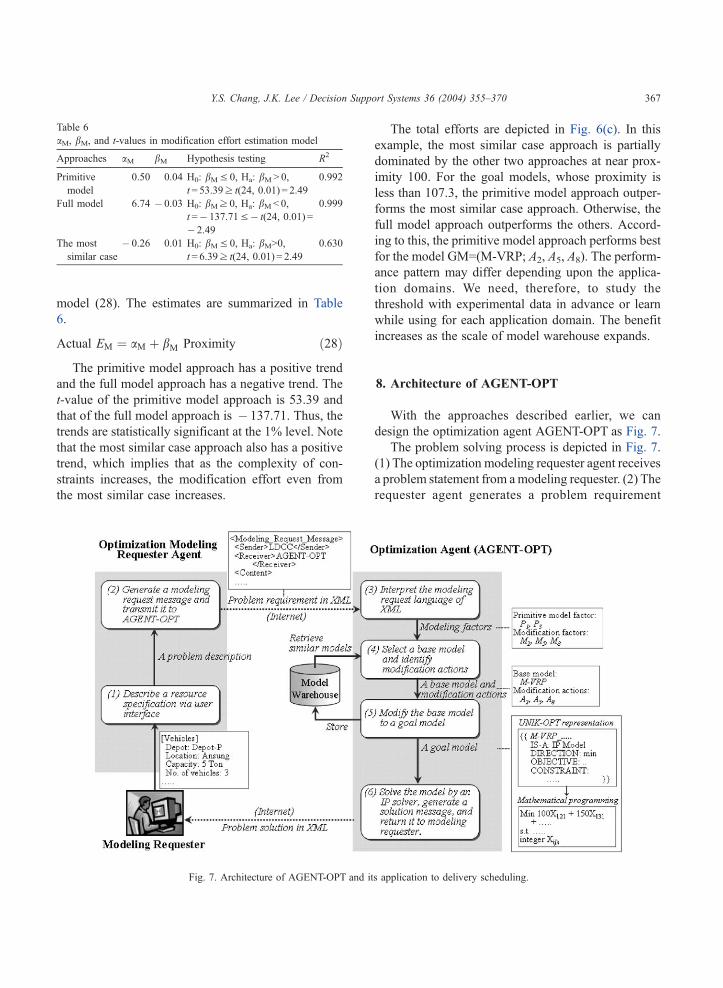
8. Architecture of AGENT-OPT
With the approaches described earlier, we can
design the optimization agent AGENT-OPT as Fig. 7.
The problem solving process is depicted in Fig. 7.
(1) The optimization modeling requester agent receives
a problem statement from amodeling requester. (2) The
requester agent generates a problem requirement
Table 6
aM, bM, and t-values in modification effort estimation model
Approaches aM bM Hypothesis testing R2
Primitive
model
0.50 0.04 H0: bMV 0, Ha: bM> 0,
t = 53.39z t(24, 0.01) = 2.49
0.992
Full model 6.74 � 0.03 H0: bMz 0, Ha: bM< 0,
t =� 137.71V� t(24, 0.01) =
� 2.49
0.999
The most
similar case
� 0.26 0.01 H0: bMV 0, Ha: bM>0,t = 6.39z t(24, 0.01) = 2.49
0.630
Fig. 7. Architecture of AGENT-OPT and its application to delivery scheduling.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 367

expressed in the modeling request language of XML as
in Fig. 8 and transmits it to the optimization agent
AGENT-OPT. (3) AGENT-OPT interprets the model-
ing request language to the base model selection and
modification factors. (4) The agent selects a base model
and identifies the necessary modification actions. (5)
The agent modifies the base model to a goal model. (6)
The agent solves the model by an IP solver (we used
LINDO as the IP solver) and generates a solution
message in XML to return it to the modeling requester.
9. Conclusion
We have developed a case-based modification
scheme that can formulate optimization models auto-
matically and designed a prototype tool AGENT-OPT
that can manage a model warehouse. For the mod-
ification, the efficiency of the primitive model, full
model, and most similar model approaches are com-
pared, and the conditions when an approach is most
efficient are discovered. Since Web-based hubs need
to provide the optimization model management serv-
ice to various clients, such as delivery schedulers and
virtual manufacturing schedulers, we need to device
architecture that can generate, reuse, and modify the
various models already built. In the future, the hyper-
text descriptions of the optimization model can be
supported by using the XRML approach [26].
We confirmed that the architecture AGENT-OPT,
which uses the representation of UNIK-OPT, could be
an answer to the requirements of a model warehouse
and interactions with other software agents. We have
designed the ontology for delivery scheduling prob-
lems, and validated the architecture. The approach
should be applicable to other application domains of a
model warehouse.
In terms of the application domain of delivery
scheduling studied in the research, we should further
investigate the relationship between schedule negotia-
tions for infeasible solutions, delivery coordination by
an intermediary with the protocols such as contract net
protocol [37] and time-bounded negotiation protocol
[29].
References
[1] M. Binbasioglu, Process-based reconstructive approach to
model building, Decision Support Systems 12 (2) (1994)
97–113.
[2] M. Binbasioglu, M. Jarke, Domain specific DSS tools for
knowledge-based model building, Decision Support Systems
2 (3) (1986) 213–223.
[3] R.W. Blanning, A relational framework for model manage-
ment in decision support systems, DSS-82 Transactions
(1982) 16–28.
[4] R.W. Blanning, An entity-relationship approach to model
management, Decision Support Systems 2 (1) (1986) 65–72.
[5] R.W. Blanning, Model management systems: an overview,
Decision Support Systems 9 (1) (1993) 9–18.
[6] N. Bolloju, M. Khalifa, E. Turban, Integrating knowledge
management into enterprise environments for the next gener-
ation decision support, Decision Support Systems 33 (2)
(2002) 163–176.
[7] R. Bonczek, C. Holsapple, A. Whinston, Foundations of
Decision Support Systems, Academic Press, New York,
1981.
[8] J. Carbonnel, Derivational analogy: a theory of reconstructive
Fig. 8. Modeling request message from a modeling requester.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370368
problem solving and expertise acquisition, in: R. Michalski,
et al. (Eds.), Machine Learning, vol. 2. Morgan Kaufmann,
San Francisco, CA, 1986, pp. 371–392.
[9] D.R. Dolk, B.R. Konsynski, Knowledge representation for
model management systems, IEEE Transactions on Software
Engineering, SE-10:6 (1984) 619–628.
[10] A. Dutta, A. Basu, An artificial intelligence approach to model
management in decision support systems, IEEE Computer 17
(9) (1984) 89–97.
[11] J.J. Elam, J.C. Henderson, L.W. Miller, Model management
systems: an approach to decision support in complex organ-
izations, Proceedings of the First International Conference on
Information System, 1980, pp. 98–110.
[12] A.M. Geoffrion, Introduction to structured modeling, Manage-
ment Science 33 (5) (1987) 547–588.
[13] A.M. Geoffrion, The formal aspects of structured modeling,
Operations Research 37 (1) (1989) 30–51.
[14] S.Y. Huh, Model-base construction with object-oriented con-
structs, Decision Sciences 24 (2) (1993) 409–434.
[15] T. Ishikawa, T. Terano, Analogy by abstraction: case retrieval
and adaptation for inventive design expert systems, Expert
Systems with Applications 10 (3/4) (1996) 351–356.
[16] S.T. Kedar-Cabelli, Toward a Computational Model of Pur-
pose-Directed Analogy, Kaufmann, Analogica, CA, 1988.
[17] C.S. Kim, J.K. Lee, Automatic structural identification and
relaxation for integer programming, Decision Support Sys-
tems 18 (3–4) (1996) 253–271.
[18] B. Konsynski, D.R. Dolk, Knowledge abstractions in model
management, DSS-82 Transactions (1982) 187–202.
[19] R. Krishnan, A logic modeling language for automated model
construction, Decision Support Systems 6 (3) (1990) 123–152.
[20] R.V. Kulkarni, P.R. Bhave, Integer programming formulations
of vehicle routing problems, European Journal of Operational
Research 20 (1985) 58–67.
[21] B. Le Claire, R. Sharda, An Object-oriented Architecture for
Decision Support Systems, 1990 ISDSS Conference Proceed-
ings, 1990, pp. 567–586.
[22] J.S. Lee, Structure frame based model management system,
Unpublished doctoral dissertation, University of Pennsylva-
nia, 1989.
[23] J.S. Lee, A model base for identifying mathematical pro-
gramming structures, Decision Support Systems 7 (2) (1991)
99–105.
[24] J.K. Lee, M.Y. Kim, Knowledge-assisted optimization model
formulation: UNIK-OPT, Decision Support Systems 13 (2)
(1995) 111–132.
[25] J.K. Lee, B.Y. Lee, Integrated management system for opti-
mization and heuristic models, Working paper, KAIST, 2002.
[26] J.K. Lee, M.M. Sohn, eXtensible Rule Markup Language—
Toward the Intelligent Web Platform, Communications of the
ACM, 2002 (forthcoming).
[27] J.K. Lee, Y.U. Song, Unification of linear programming with a
rule-based system by post-model analysis approach, Manage-
ment Science 41 (5) (1995) 835–847.
[28] J.S. Lee, C.V. Jones, M. Guignard, MAPNOS: mathematical
programming formulation normalization system, Expert Sys-
tems With Applications 1 (1990) 367–381.
[29] K.J. Lee, Y.S. Chang, J.K. Lee, Time-bounded negotiation
framework for electronic commerce agents, Decision Support
Systems 28 (4) (2000) 319–331.
[30] M.L. Lenard, An object-oriented approach to model manage-
ment, Decision Support Systems 9 (1) (1993) 67–73.
[31] T.P. Liang, Integrating model management with data manage-
ment in decision support systems, Decision Support Systems 1
(1) (1985) 221–232.
[32] T.P. Liang, Modeling by analogy: a case-based approach to
automated linear program formulation, IEEE, (1991) 276–283.
[33] T.P. Liang, Analogical reasoning and case-based learning in
model management systems, Decision Support Systems 10 (2)
(1993) 137–160.
[34] T.P. Liang, B.R. Konsynski, Modeling by analogy: use of
analogical reasoning in model management systems, Decision
Support Systems 9 (1) (1993) 113–125.
[35] W.A. Muhanna, An object-oriented framework for model
management and DSS development, 1990 ISDSS Conference
Proceedings (1990) 553–565.
[36] S.J. Park, H.D. Kim, Constraint-based metaview approach for
modeling environment generation, Decision Support Systems
9 (4) (1993) 325–348.
[37] R.G. Smith, The contract net protocol: high-level communi-
cation and control in a distributed problem solver, IEEE
Transactions on Computer 29 (1980) 1104–1113.
[38] Y. Tsai, Model integration using SML, Decision Support Sys-
tems 22 (4) (1998) 355–377.
[39] R.C. Vellore, A. Sen, A.S. Vinze, A Case-Based Planning
Approach to Model Formulation, 1990 ISDSS Conference
Proceedings, 1990, pp. 353–382.
[40] W.L. Winston, Operations Research, 3rd ed., Duxbury Press,
Belmont, CA, 1994.
[41] K. Yeom, J.K. Lee, Logical representation of integer program-
ming models, Decision Support Systems 18 (3–4) (1996)
227–251.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370 369

Yong Sik Chang has received a PhD
from the Graduate School of Manage-
ment at Korea Advanced Institute of
Science and Technology (KAIST) and
serves as a principal researcher at Inter-
national Center for Electronic Commerce
(ICEC). He received his BS (1988) from
Sogang University and MS (1991) from
Pohang Institute of Science and Technol-
ogy (POSTECH). He has industrial
experiences of developing MIS and elec-
tronic commerce applications. His current research focus is the
electronic commerce, model management, and multi-agent systems.
Jae Kyu Lee is a Professor of Manage-
ment Information Systems at Korea
Advanced Institute of Science and Tech-
nology and a Director of the Interna-
tional Center for Electronic Commerce.
He received a PhD from the Wharton
School, University of Pennsylvania. He
was Chair of the International Confer-
ence on Electronic Commerce (ICEC
1998 and ICEC 2000) and the Third
World Congress on Expert Systems
(1996). He has authored several books on electronic commerce
and expert systems and published numerous papers in the following
journals: Management Science, CACM, DSS, Expert Systems with
Applications, International Journal of Electronic Commerce, Deci-
sion Science, and many others. Currently, he is an Editor-in-Chief of
the Journal Electronic Commerce Research and Applications and
Editorial Member of various international journals like Decision
Support Systems, Expert Systems with Applications, International
Journal of Electronic Commerce, and so on. His main research
interests are in the fields of electronic commerce and intelligent
information systems.
Y.S. Chang, J.K. Lee / Decision Support Systems 36 (2004) 355–370370