Embed Size (px)
DESCRIPTION
Ch6 Representation Signals by Using Continuous-Time Complex Exponentials: The Laplace Transform (用连续时间复指数信号表示信号:拉普拉斯变换). Ch6.1 引言( Introduction ). (一)使用拉普拉斯变换分析信号 The Laplace Transform (拉普拉斯变换) Properties of Laplace Transform (拉普拉斯变换的性质) Inversion of the Laplace Transform (拉普拉斯反变换) - PowerPoint PPT Presentation
Citation preview

Ch6 Representation Signals by Using Continuous-Time Complex Exponentials: The Laplace Transform(用连续时间复指数信号表示信号:拉普拉斯变换)

Ch6.1 引言( Introduction)
(一)使用拉普拉斯变换分析信号•The Laplace Transform (拉普拉斯变换)
•Properties of Laplace Transform (拉普拉斯变换的性质)
•Inversion of the Laplace Transform (拉普拉斯反变换)
(二)使用拉普拉斯变换分析系统•Solving Differential Equations With Initial Conditions (系统响应求解)•The Transfer Function (系统函数)

s
1
x(t)=etu(t) >0的傅里叶变换?
将 将 xx(( tt ) 乘以衰减因子 ) 乘以衰减因子ee --tt
ttxtxF ttt dee)(]e)([ j
ttt dee )j(0
0
)( de tts js令
不存在 !
若
From Fourier transform to Laplace transform从傅里叶变换到拉普拉斯变换

推广到一般情况
令 s= +j
ttxtxF ttt dee)(]e)([ j
ttx tde)( )j(
)(de)( sXttx st
ttxsX stde)()(
定义:定义:
对 x(t)e-t求傅里叶反变换可得
ssXtx stde)(πj2
1)(
j
j
拉普拉斯正变换拉普拉斯正变换
拉普拉斯反变换
From Fourier transform to Laplace transform 从傅里叶变换到拉普拉斯变换

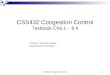
The Laplace transform applies to more general signals than the Fourier transform does. ( a ) Signal for which the Fourier transform does not exist. ( b ) Attenuating factor associated with Laplace transform. ( c ) The modified signal x( t) e-t is absolutely integrable for > 1.

Real and imaginary parts of the complex exponential est, where s = + j.

Ch6.2 the Laplace Transform(拉普拉斯变换)
• Definitions (定义)• Regions of Convergence (收敛域)• S plane ( S平面)• Zeros and Poles (零极点)

j
jd)(
πj2
1)(
sesXtx st
Bilateral Laplace TransformBilateral Laplace Transform(双边拉普拉斯变换)(双边拉普拉斯变换)
dtetxsX st)()(
)]([)( txLsX
)()( sXtx L
符号表示:符号表示:)]([)( 1 sXLtx
信号信号 xx(( tt))可分解成复指数可分解成复指数 eestst的加权叠加的加权叠加 ,,权重正比于权重正比于 X( s ) 。

收敛域收敛域 : : 双边双边拉普拉斯变换拉普拉斯变换存在的条件
tetx td|)(|
对任意信号 x( t) ,若满足上式,则 x( t)应满足
0e)(lim
t
ttx
Regions of Convergence ((双边拉普拉斯变换的收敛域)
Regions of Convergence ( ROC) :使上式成立的所有 值。

Regions of Convergence(收敛域)收敛域)
X ( s )不存在
收
敛
区
j
0
S平面
右半平面左半平面
Ex: x ( t ) = et u( t ) 的傅里叶变换?拉氏变换?
X ( s )存在

)()()()( 21 tuetxtuetx atat 和
)]([)]([ 1 tueLtxL t
s
1Re( s) >-a
)]([)]([ 2 tueLtxL t
s
1 Re( s) < -a
不同的信号,虽然具有相同形式的拉氏变换,但收敛域不同。

The ROC for x( t ) = eatu( t ) is depicted by the shaded region. A pole is located at s = a.

The ROC for y( t ) = –eatu –( t ) is depicted by the shaded region. A pole is located at s = a.

拉普拉斯变换与傅里叶变换的关系拉普拉斯变换与傅里叶变换的关系
11))当收敛域包含当收敛域包含 jj 轴轴时时,拉普拉斯变换和傅里叶变换均存在。 j)()j( ssXX
22))当收敛域不包含当收敛域不包含 jj 轴轴时时,拉普拉斯变换存在而傅里叶变换均不存在。

011
1
011
1)(asasas
bsbsbsbsH
nn
n
mm
mm
)())((
)())((
21
21
n
mm ssssss
rsrsrsb
polesZeros
Zeros and Poles(零极点))

b=[1];a=[1 3];
Splane( b,a) ;
w=linspace( 0,5,256) ;
subplot( 2,1,1) ;
splane( b,a) ;
h=freqs( b,a,w) ;
subplot( 2,1,2) ;
plot( w,abs( h)) ;
MATLAB code:

Ch6.3 The Unilateral Laplace Transform(单边拉普拉斯)
Definitions:
dtetxsXtxL st
0
)()()]([

)Re(1
)(e ss
tu Lt
)Re( 1
)(e ss
tu Lt
0)Re( j
1 )(e
0
j 0
ss
tu Lt
0)Re( j
1 )(e
0
j 0
ss
tu Lt
基本信号的拉普拉斯变换

0)Re( )( cos20
2
0
ss
stut L
-Re(s) 1 )( Lt
0)Re( )( sin20
20
0
ss
tut L
-Re(s) )()( nLn st
基本信号的拉普拉斯变换

0)Re( 1
)( ss
tu L
0Re(s) 1
)(2
s
ttu L
0Re(s) !
)(1
n
Ln
s
ntut
Re(s) )(
1 )(e
2stut Lt
基本信号的拉普拉斯变换

020
20
00 Re(s)
)( )( cose 0
s
stut Lt
020
20
00 Re(s)
)(s )(sine 0
Lt ttu
0Re(s) )(
)(cos22
02
20
2
0
s
sttut L
0Re(s) )(
2 )(sin
220
20
0
s
sttut L
基本信号的拉普拉斯变换

Ch6.4 properties of Laplace Transform(单边拉普拉斯的性质)
1. 1. LinearityLinearity(线性特性)(线性特性)
)()()()( 2121 sbXsaXtbxtax uL
0)/(1
)( aasXa
atx uL
2. scaling 2. scaling (展缩特性)(展缩特性)

if )()()( sXtutx uL
)()()( 000 sXettuttx stLu then
3. Time Shift3. Time Shift(时移特性)(时移特性)
44. . s-domain shift(指数加权性质 ---s域位移)
)()(e 00 ssXtx uLts
20
2)(
s
s)](cos[ 0 tuteL t Ex:

)()()(*)( sYsXtxtx uL
5. convolution5. convolution(卷积特性)(卷积特性)
13)1)(3(
1)(
s
B
s
A
sssY
3)3)((
sssYA
3
1
0)(
sssYB
3
1
)()1(3
1)( 3 tuety t
Example: Find the unitial Laplace transform of y(t)=etu(t)etu(t)

6. Differentiation in the S-domain ( S域微分特性)
s
sttx uL
d
)(dX)(
)1
()]([sds
dttuL
)1
()]([2
2
sds
dtutL
)]([ tutL n1
!ns
n
2
1
s
3
2
s
)]([ tuetL tn 1)(
! ns
n
Ex:Ex:

)0()(d
)(d xssXt
tx L
证明:证明:
0de
d
)(d
d
)(dt
t
tx
t
txL st
tstxtx stst d)e)((e)(0
0
0
de)()0( ttxsx st )0()( xssX
7. Differentiation in the time-domainDifferentiation in the time-domain ((时域微分特时域微分特性)性)
)0(')0()(d
)(d 22
2 xsxsXs
t
tx L
)0(...)0(')0()(d
)(d 121 nnnnn
n
xxsxssXst
tx

s
x
s
sXx uL
t )0()(d)(
1
d)()0(01
xx
8. Integration Property Integration Property(积分特性)(积分特性)
])()([0
dutrLt
s
tuL )]([2
1
s
Where,
Ex:

)()()( limlim0
ssFftfst
9. Initial- and Final-Value Theorems(初值定理和终值定理)
)()0()( limlim0
ssFftfst

部分分式法求部分分式法求拉普拉斯反变换反变换 ::由由 XX(s)(s)求求 xx((tt))
011
1
011
1)(asasasa
bsbsbsbsX
NN
NN
MM
MM
)(
)(2210 sA
sDscscscc NM
NM
)(
)()()()()()( 1)(''
2'
10 sA
sDLtctctctctx NM
NM 所以
当当 MMNN时存在时存在 真分式
1)( Lt由于 st L)(' NMLNM st )()(
Ch6.5 Inversion of Unilateral Laplase transform (拉普拉斯反变换)

NisA
sDdsA
idsii ,,2,1)(
)()(
)()eee()( 21210 tuAAAtx td
Ntdtd N
设设
其中其中 ::
N
N
ds
A
ds
A
ds
A
sA
sD
2
2
1
1
)(
)(
(1) A(s)=0有有 NN个单极点个单极点
)(
)()( 1
0 sA
sDLtx 利用部分分式法:利用部分分式法:
Inversion by Partial-Fraction ExpansionInversion by Partial-Fraction Expansion (部分分式法求(部分分式法求拉普拉斯反变换)反变换)
Nddds ,,, 21

Ex: Find the inverse Laplase transform ofFind the inverse Laplase transform of
sss
ssX
34
2)(
23
SolutionSolution::
)3)(1(
2
34
2)(
23
sss
s
sss
ssX
31321
s
k
s
k
s
k
3
2
)3)(1(
2)()( 001
ss ss
ssXsk
2
1
)3(
2)()1( 112
ss ss
ssXsk
6
1
)1(
2)()3( 333
ss ss
ssXsk
)(e6
1)(e
2
1)(
3
2)( 3 tutututx tt
num=[1 2]; den=[1 4 3 0];[r,p]=residue(num,den)r = -1/6 -1/2 2/3 p = -3 -1 0

Nds
sD
sA
sD
)(
)(
)(
)(
NN
ds
A
ds
A
ds
A
)()( 221
NisA
sDds
siNA ds
NiN
iN
i ,,2,1])(
)()[(
d
d
)!(
1
Inversion by Partial-Fraction ExpansionInversion by Partial-Fraction Expansion (部分分式法求(部分分式法求拉普拉斯反变换)反变换)
)(e)1
t()(
1
210 tuN
AtAAtx dt
NN
)()!1()(
1
tuei
tA
ds
A dti
iLi
i
i
其中其中 ::
则则 ::
dddds N 21(2) A(s)=0有有 NN重极点重极点

3)1(
2)(
ss
ssX
Solution:Solution: 3)1(
2)(
ss
ssX
34
2321
)1()1()1()(
s
k
s
k
s
k
s
ksX
2)1(
2)( 0301
ss s
sssXk
32
)()1( 113
4
ss s
ssXsk
2)2
(d
)()1(d1
'1
3
3
ss s
s
s
sXsk
2)2
(2
1
d
)()1(d
2
11
''12
32
2
ss s
s
s
sXsk
)()e2
3e2e22( 2 tutt tttLu
[r,p]=residue( [1 -2],[1 3 3 1 0]) ;r =2 2 3 -2 p = -1 -1 -1 0
Ex: Ex: Find the inverse Laplase transform ofFind the inverse Laplase transform of
X(s)有 1个
3阶重极点

24
42)(
2
3
ss
sssX
Solution:Solution: X( s)为有理假分式,将 X( s)化为有理真分式
24
12204)(
2
ss
sssX
]24
1220[)(4)()(
21'
ss
sLtttx
)(e6.0)(e6.20)(4)()( 45.045.4' tututttx tt
[r,p,k]=residue( [1 0 2 -4],[1 4 -2])
Ex: Ex: Find the inverse Laplase transform ofFind the inverse Laplase transform of

(3) A(s)=0有复极点有复极点
2221
)()(
)(
s
BsB
sA
sD则
Inversion by Partial-Fraction ExpansionInversion by Partial-Fraction Expansion (部分分式法求(部分分式法求拉普拉斯反变换)反变换)
)()()(
)( 21
js
A
js
A
sA
sD
222
221
)()(
)(
s
c
s
sc
js
若 x0(t)为实信号,则 A1与 A2 为共轭以保证 为实系数。
)(
)(
sA
sD
21
2
11
BBc
Bc令
)()sin(e)()cos(e)( 210 tutctutctx tt

SolutionSolution::
)4(
1)()3(
2
2
ss
esX
s
)4(3
1)()2(
22
sssX2
2
)4(
8)()1(
s
ssX
2)4(
881)(
s
ssX
4)4(1 2
21
s
k
s
k
24)88()()4( 142
1 ss ssxsk
8)88()()4(d
d '4
22 ssxs
sk s
)(e24)(e8)()( 44 tututttx tt
2
2
)4(
8)()1(
s
ssX
Ex: Ex: Find the inverse Laplase transform ofFind the inverse Laplase transform of

令 s2=q,
)4(3
1)()2(
22
sssX
)4(3
1)(
qqsX则 )
)4((
3
1 21
q
k
q
k
4
1
)4(
101
qqq
qk
4
1
)4(
1)4( 42
qqq
qk
))4(4
1
4
1(
3
1)(
22
sssX于是
)()2sin2
1(
12
1)( tutttx
)4(
1)()3(
2
2
ss
esX
s
)4(3
1)()2(
22
sssX2
2
)4(
8)()1(
s
ssX
Ex: Ex: Find the inverse Laplase transform ofFind the inverse Laplase transform of
SolutionSolution::

的反变换先用部分分式求)4(
1)(
21
sssX
的反变换再利用时移特性求)4(
)(2
2
2
ss
esX
s
)4(
1)()3(
2
2
ss
esX
s
4)4(
1)(
2321
21
s
ksk
s
k
sssX
04
1
4
1321 kkk
)()2cos1(4
1)(1 tuttx )2()]2(2cos1[
4
1)(2 tuttx
k2, k3用待定系数法求
)4(
1)()3(
2
2
ss
esX
s
)4(3
1)()2(
22
sssX2
2
)4(
8)()1(
s
ssX
Ex: Ex: Find the inverse Laplase transform ofFind the inverse Laplase transform of
SolutionSolution::

时域差分方程 时域响应y( t)
S域响应Y( s)
拉氏变换拉氏反变换
解微分方程
解代数方程S域代数方程
Ch6.6 Solving Diffrential Equations with Initial Conditions(利用拉普拉斯变换分析系统响应)

Solving Diffrential Equations with Initial Conditions(利用拉普拉斯变换分析系统响应)
)(d
)(d
d
)(d)(
d
)(d
d
)(d212
2
0212
2
txbt
txb
t
txbtya
t
tya
t
ty
已知 x ( t), y( 0), y' ( 0 ) ,求 y( t)。
11)) 经拉氏变换拉氏变换将域微分方程变换为域代数方程
22)) 求解 s域代数方程,求出 Yzi( s) , Yzs
( s)33)) 拉氏反变换拉氏反变换,求出响应的时域表示式
求解步骤:求解步骤:

Solving Diffrential Equations with Initial Conditions(利用拉普拉斯变换分析系统响应)
)]0(')0()([ 2 ysysYs
)()0()0(')0(
)(21
221
20
212
1 sXasas
bsbsb
asas
yaysysY
)()()( 212
0 sXbssXbsXsb
)}()({1 sYsYL zizs )()()( tytyty zizs
Yzi( s) Yzs( s)
y"( t) a1y'( t)
a2y ( t)
)()(')(" 210 txbtxbtxb
)]0()([1 yssYa )(2 sYa

Ex: Use the unilateral Laplace transform to determine the output of a system Ex: Use the unilateral Laplace transform to determine the output of a system represented by the differential equationrepresented by the differential equation
y''( t ) + 5y'( t ) + 6y( t ) = 2x '( t ) + 8x( t) in response to input x( t ) = e-tu( t) .Assume that the initial
conditions on the system are y( 0-) =3 and y'( 0-) =2.
SolutionSolution:: Using the differential property and taking the unilateral Using the differential property and taking the unilateral Laplace transform of both sides of the differential equation, we Laplace transform of both sides of the differential equation, we obtain obtain ((对微分方程取拉氏变换拉氏变换可得)
)(8)(2)(6)]0()([5)0()(2 sXssXsYyssYsysYs
)65(
)0(')0()5()(
65
82)(
22
ss
yyssX
ss
ssY
)()( sYsY zizs
3
8
2
11
65
173)(
2
ssss
ssYzi
0,e8e11)}({)( 321 tsYLty ttzizi

Solution:
)()ee4e3()}({)( 321 tusYLty tttzszs
1
1
)3)(2(
82
1
1
65
82)(
2
sss
s
sss
ssYzs
0,e7e7e3)()()( 32 ttytyty tttzizs
)3(
1
2
4
1
3
sss
Ex: Use the unilateral Laplace transform to determine the output of a system Ex: Use the unilateral Laplace transform to determine the output of a system represented by the differential equationrepresented by the differential equation
y''( t ) + 5y'( t ) + 6y( t ) = 2x '( t ) + 8x( t) in response to input x( t ) = e-tu( t) .Assume that the initial
conditions on the system are y( 0-) =3 and y'( 0-) =2.

时域时域 复频域复频域
tcc
LL
RR
iC
t
dt
tiLt
tRit
d)(1
)(
)(d)(
)()( )()( sRIsV RR
)0()()( LLL LissLIsV
)0(1
)(1
)( ccc VC
sIsC
sV
Laplace Transform Circuit ModelsLaplace Transform Circuit Models(电路的(电路的 SS域模域模型)型) ::
Ch6.7 Laplace Transform Methods in Circuit Analysis(利用拉普拉斯变换分析电路)

Laplace Transform Circuit ModelsLaplace Transform Circuit Models(电路的(电路的 SS域模型)域模型)
R、 L、 C串联形式的 S域模型R
IR(s )
V R(s )
sL )0( LLi
IL(s )
V L(s)
sC
1)0(
1 cv
s
IC(s )
V C(s )

Ex: Ex: Use the Laplace transform circuit models to determing the voltage Use the Laplace transform circuit models to determing the voltage vc(t) in the
circuit for an applied voltage EU(t). The voltage across the capacitor vc(0-)= -E.R
C
v C(t)i(t)E u (t)
R
s
E)(sI
V C(s )
1 /sC
E /s
SolutionSolution::建立电路的 s域模型,由 s域模型写回路方程
s
E
s
EsI
sCR )()
1(
求出回路电流)
1(
2)(
sCRs
EsI
s
E
sC
sIsVC
)()( )
121
(
RCss
E
0),e21()(1
tEtvt
RCc
电容电压为

Ch6.11 The Transfer Function(系统函数函数)
系统函数系统函数 ::系统在零状态条件下,输出的拉氏变换式系统在零状态条件下,输出的拉氏变换式与输入的拉式变换式之比,记为与输入的拉式变换式之比,记为 HH((ss))。。
h(t)H(s)
x(t) yzs(t)=x(t)*h(t)
X(s) Yzs(s)=X(s)H(s)
)(
)(
)]([
)]([)(
sX
sY
txL
tyLsH zszs

The Transfer function and Differential Equation(系统函数与微分方程)函数与微分方程)
Ex: Find the transfer function of the LTI system descriped Ex: Find the transfer function of the LTI system descriped by the differential equationby the differential equation
107
12
)(
)()(
2
ss
s
sX
sYsH
)()12()(]107[ 2 sXssYss
y''(t) + 7y'(t) +10y(t) = 2x '(t) + x(t)

Causality and Stability(因果性与稳定性)与稳定性)
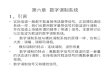
The relationship between the locations of poles and the impulse response in a causal system. ( a ) A pole in the left half of the s-plane corresponds to an exponentially decaying impulse response. ( b ) A pole in the right half of the s-plane corresponds to an exponentially increasing impulse response. The system is unstable in this case.

Causality and Stability(因果性与稳定性)与稳定性)
The relationship between the locations of poles and the impulse response in a stable system. ( a ) A pole in the left half of the s-plane corresponds to a right-sided impulse response. ( b ) A pole in the right half of the s-plane corresponds to an left-sided impulse response. In this case, the system is noncausal.

Causality and Stability(因果性与稳定性)与稳定性)
A system that is both stable and causal must have a transfer function with all of its poles in the left half of the s-plane, as shown here.

Causality and Stability(因果性与稳定性)与稳定性)
因果系统因果系统在 s域有界输入有界输出( BIBOBIBO)的充要条件是系统函数 H( s)的全部极点极点 位于的左半左半 ss平面平面。
连续时间 LTILTI系统系统 BIBOBIBO稳定稳定的充分必要条件是
Sh d)(

Ex: A Ex: A causal system has the transfer functionsystem has the transfer function
Solution Solution ::
2
1
3
2)(
sssH
极点 s= -3,在 s左半平面 ;
极点 s= 2 , 在 s右半平面。
)(th )(e)(e2 23 tutu tt
The system is not stable(不稳定)。
Find the impulse response. Is the system stable?

Ch6.13 Determing the Frequency Response from Poles and Zeros(由零极点确定系统频率响应)
收
敛
域
j
j)()j( ssHH
)()j()j( jeHH
当收敛域包含 j 轴时,则系统频响特性频响特性 ::
幅频响应 相频响应

Determing the Frequency Response from Poles and Zeros(由零极点确定系统频率响应)
对于零极增益表示的系统函数
当系统稳定时,令 s=j,则得
n
ii
m
jj
p
z
KH
1
1
)j(
)j(
)j(
n
ii
m
jj
ps
zs
KsH
1
1
)(
)(
)(

复数复数 aa和和 bb及及 aabb的向量表示的向量表示
j
0
a
b
a-b
j
0
a
b
|a-b|
系统函数的向量表示系统函数的向量表示
j
0
ip
jzj
i
jiD
jN
j
jj Nz j
e)j(
iii Dp je)j(
Determing the Frequency Response from Poles and Zeros(由零极点确定系统频率响应)

EX: Sketch the magnitude response and phase EX: Sketch the magnitude response and phase
response of the LTI systemresponse of the LTI system1
1)(
ssH
SolutionSolution::
1j
1)()j( j
ssHH
-1
jaj
j1
)1(0
D1
Db
0 5 10
0.2
0.4
0.6
0.8
1)j( H
1
5 10
-90o
0
)j(
11
)j(0
0
DH 00)j( 00
2
11)j(
11
D
H 451arctan0)j( 11
01
)j(
DH 900)j( 0