Embed Size (px)
Citation preview

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 1
Chaos and weather predictionJanuary 2000
By Roberto Buizza1
European Centre for Medium-Range Weather
Abstract
The weatheris a chaoticsystem.Small errorsin the initial conditionsof a forecastgrow rapidly, andaffect predictability.Furthermore,predictabilityis limited by modelerrorsdueto theapproximatesimulationof atmosphericprocessesof thestate-of-the-art numerical models.
Thesetwo sourcesof uncertaintieslimit theskill of single,deterministicforecastsin anunpredictableway, with daysof high/poor quality forecasts randomly followed by days of high/poor quality forecasts.
Two of the most recentadvancesin numericalweatherprediction,the operationalimplementationof ensemblepredictionsystems and the development of objective procedures to target adaptive observations are discussed.
Ensembleprediction is a feasiblemethodto integratea single, deterministicforecastwith an estimateof the probabilitydistributionfunctionof forecaststates.In particular, ensemblecanprovideforecasterswith anobjectivewayto predicttheskillof singledeterministicforecasts,or, in otherwords,to forecastthe forecastskill. The EuropeanCentrefor Medium-RangeWeatherForecasts(ECMWF) EnsemblePredictionSystem(EPS),basedon thenotion that initial conditionuncertaintiesarethe dominant source of forecast error, is described.
Adaptive observationstargetedin sensitive regionscanreducetheinitial conditions’uncertainties,andthusdecreaseforecasterrors.More generally, singularvectorsthat identify unstableregionsof theatmosphericflow canbeusedto identify optimalways to adapt the atmospheric observing system.
Table of contents
1 . Introduction
2 . The Lorenz system
3 . Numerical weather prediction
4 . Sources of forecast error
5 . The ECMWF Ensemble Prediction System
5.1 The original EPS configuration
5.2 The new EPS configuration
6 . Targeted observations
7 . Summary and future developments
8 . Conclusion
9 . Acknowledgements
APPENDIX A Singular vector definition
1. Corresponding author address: Dr Roberto Buizza, ECMWF, Shinfield Park, Reading RG2 9AX. Tel.:0118-9499653. Email:[email protected]

Chaos and weather prediction
2 Meteorological Training Course Lecture Series
ECMWF, 2002
APPENDIX B Projection operators
REFERENCES
1. INTRODUCTION
A dynamicalsystemshowsachaoticbehavior if mostorbitsexhibit sensitivedependence(Lorenz1993).An orbit
is characterizedby sensitivedependenceif mostotherorbitsthatpasscloseto it atsomepointdonot remainclose
to it as time advances.
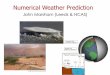
Figure 1. (a)-(c)Forecastfor thegeopotentialheightat1000hPa(thisfield illustratestheatmosphericstateclose
to the surface) given by three forecasts started from very similar initial conditions, and (d) verifying analysis.
Contour interval is 5 m, with only values smaller than 5 m shown.
Theatmosphereexhibits thisbehavior. Fig. 1 showsthreedifferentweatherforecasts,all startedfrom verysimilar
initial conditions.Thedifferencesamongthethreeinitial conditionsweresmallerthanestimatedanalysiserrors,
andeachof thethreeinitial conditionscouldbeconsideredasanequallyprobableestimateof the“true” initial state
of theatmosphere.After 5daysof numericalintegration,thethreeforecastsevolvedintoverydifferentatmospheric
situations.In particular, notethe differentpositionsof the cycloneforecastin the EasternAtlantic approaching
UnitedKingdom(Fig.1 (a)-(c)). Thefirst forecastindicatedtwo areasof weakcycloniccirculationwestandsouth
of theBritish Isles;thesecondforecastpositionedamoreintensecyclonesouthwestof Cornwall, andthethird fore-
castkeptthecyclonein theopenseas.Thislatterturnedoutto bethemostaccuratewhencomparedto theobserved
atmosphericstate(Fig. 1 (d). This is a typicalexampleof orbitsinitially closetogetherandthendivergingduring
5
FC_0 1000hPa Z 1996-12-21 12h fc t+120
0
0
55
5FC_25 1000hPa Z 1996-12-21 12h fc t+120
0 5
5
FC_24 1000hPa Z 1996-12-21 12h fc t+120 Analysis 1000hPa Z 1996-12-26 12h

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 3
time evolution.
Theatmosphereis an intricatedynamicalsystemwith many degreesof freedom.Thestateof theatmosphereis
describedby thespatialdistribution of wind, temperature,andotherweathervariables(e.g.specifichumidity and
surfacepressure).Themathematicaldifferentialequationsdescribingthesystemtime evolution includeNewton's
laws of motion usedin the form ‘accelerationequalsforce divided by mass’,andthe laws of thermodynamics
which describethebehavior of temperatureandtheotherweathervariables.Thus,generallyspeaking,thereis a
set of differential equations that describe the weather evolution, at least, in an approximate form.
Richardson(1922)canbeconsideredthefirst to have shown that theweathercouldbepredictednumerically. In
hiswork,heapproximatedthedifferentialequationsgoverningtheatmosphericmotionswith asetof algebraicdif-
ferenceequationsfor thetendenciesof variousfield variablesatafinite numberof grid pointsin space.By extrap-
olatingthecomputedtendenciesaheadin time,hecouldpredictthefield variablesin thefuture.Unfortunately, his
results were very poor, both because of deficient initial data, and because of serious problems in his approach.
After World War II theinterestin numericalweatherpredictionrevived,partlybecauseof anexpansionof theme-
teorologicalobservationnetwork,but alsobecauseof thedevelopmentof digital computers.Charney(1947,1948)
developeda modelapplyinganessentialfiltering approximationof theRichardson'sequations,basedon theso-
calledgeostrophicandhydrostaticequations.In 1950,anelectroniccomputer(ENIAC) wasinstalledatPrinceton
University, andCharney, Fjørtoft andVonNeumann& Ritchmeyer (1950)madethefirst numericalpredictionus-
ing theequivalentbarotropicversionof Charney’smodel.Thismodelprovidedforecastsof thegeopotentialheight
near500hPa,andcouldbeusedasanaid to provideexplicit predictionsof othervariablesassurfacepressureand
temperaturedistributions.Charney's resultsled to thedevelopmentsof morecomplex modelsof theatmospheric
circulation, the so-called global circulation models.
With the introductionof powerful computersin meteorology, themeteorologicalcommunityinvestedmoretime
andefforts to developmorecomplex numericalmodelsof theatmosphere.Oneof themostcomplex modelsused
routinely for operationalweatherpredictionis the oneimplementedat the EuropeanCentrefor Medium-Range
WeatherForecasts(ECMWF).At thetime of writing (December1999),its is basedon a horizontalspectraltrian-
gulartruncationT319with 60 vertical levelsformulation(Simmonset al. 1989,Courtieret al. 1991,Simmonset
al. 1995).It includesaparameterizationof many physicalprocessessuchassurfaceandboundarylayerprocesses
(Viterbo & Beljaars 1995) radiation (Morcrette 1990), and moist processes (Tiedtke 1993,Jacob 1994).
Thestartingpoint, in mathematicaltermstheinitial conditions,of any numericalintegrationis givenby verycom-
plex assimilationproceduresthat estimatethe stateof the atmosphereby consideringall availableobservations.
The fact thata limited numberof observationsareavailable(limited comparedto thedegreesof freedomof the
system)andthatpartof theglobeis characterizedby a very poorcoverageintroducesuncertaintiesin the initial
conditions. The presence of uncertainties in the initial conditions is the first source of forecast errors.
A requirementfor skilful predictionsis thatnumericalmodelsareableto accuratelysimulatethedominantatmos-
phericphenomena.Thefactthatthedescriptionof somephysicalprocesseshasonly acertaindegreeof accuracy,
andthefactthatnumericalmodelssimulateonly processeswith certainspatialandtemporal,is thesecondsource
of forecasterrors.Computerresourcescontribute to limit thecomplexity andtheresolutionof numericalmodels
and assimilation, since, to be useful, numerical predictions must be produced in a reasonable amount of time.
These two sources of forecast errors cause weather forecasts to deteriorate with forecast time.
Initial conditionswill alwaysbeknown approximately, sinceeachitemof datais characterizedby anerrorthatde-
pendson theinstrumentalaccuracy. In otherwords,smalluncertaintiesrelatedto thecharacteristicsof theatmos-
pheric observingsystemwill always characterizethe initial conditions.As a consequence,even if the system
equationswerewell known, two initial statesonly slightly differing would departonefrom theothervery rapidly

Chaos and weather prediction
4 Meteorological Training Course Lecture Series
ECMWF, 2002
astime progresses(Lorenz1965).Observationalerrors,usuallyin the smallerscales,amplify andthroughnon-
linear interactions spread to longer scales, eventually affecting the skill of these latter ones (Somerville 1979).
Theerrorgrowth of the10-dayforecastof theECMWF modelfrom 1 December1980to 31 May 1994wasana-
lyzedin greatdetailby Simmonset al. (1995).It wasconcludedthat15 yearsof researchhadimprovedsubstan-
tially theaccuracy over thefirst half of theforecastrange(sayup to forecastday5), but that therehadbeenlittle
errorreductionin thelateforecastrange.While thisappliedonaverage,it wasalsopointedout thattherehadbeen
improvementsin theskill of thegoodforecasts.In otherwords,goodforecastshadhigherskill in theninetiesthan
before.Theproblemwasthatit wasdifficult to assessa-prioriwhethera forecastwouldbeskilful or unskillful us-
ing only a deterministic approach to weather prediction.
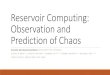
Figure 2. Thedeterministicapproachto numericalweatherpredictionprovidesonesingleforecast(blueline) for
the“true” timeevolutionof thesystem(redline). Theensembleapproachto numericalweatherpredictiontriesto
estimate the probability density function of forecast states (magenta shapes). Ideally, the ensemble probability
density function estimate includes the true state of the system as a possible solution.
Generallyspeaking,a completedescriptionof theweatherpredictionproblemcanbestatedin termsof the time
evolutionof anappropriateprobabilitydensityfunction(PDF)in theatmosphere'sphasespace(Fig.2 ). Although
thisproblemcanbeformulatedexactlythroughthecontinuityequationfor probability(Liouville equation,seee.g.
Ehrendorfer1994),ensemblepredictionbasedon a finite numberof deterministicintegrationsappearsto be the
only feasiblemethodto predictthePDFbeyondtherangeof linearerrorgrowth. Ensemblepredictionprovideda
way to overcomeoneof theproblemshighlightedby Simmonset al. (1995),sinceit canbeusedto estimatethe
forecast skill of a deterministic forecast, or, in other words, to forecast the forecast skill.
SinceDecember1992,boththeUS NationalCenterfor EnvironmentalPredictions(NCEP, previously NMC) and
ECMWF have integratedtheir deterministichigh-resolutionpredictionwith medium-rangeensembleprediction
(Tracton& Kalnay1993,Palmeret al. 1993).Thesedevelopmentsfollowedthetheoreticalandexperimentalwork
of, among others,Epstein (1969),Gleeson (1970),Fleming (1971a-b) andLeith (1974).
Bothcentresfollowedthesamestrategy of providing anensembleof forecastscomputedwith thesamemodel,one
startedwith unperturbedinitial conditionsreferredto asthe“control” forecastandtheotherswith initial conditions
definedaddingsmallperturbationsto thecontrol initial condition.Generallyspeaking,thetwo ensemblesystems
Forecast time
Linear regime Non-linear regime

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 5
differ in theensemblesize,in thefactthatatNCEPacombinationof laggedforecastsis used,andin thedefinition
of theperturbedinitial. Thereaderis referredto Toth& Kalnay(1993)for thedescriptionof the'breeding'method
appliedatNMC andto Buizza& Palmer(1995)for athoroughdiscussionof thesingularvectorapproachfollowed
at ECMWF.
A differentmethodologywasdevelopedfew yearslaterat theAtmosphericEnvironmentService(Canada),where
a systemsimulationapproachwasfollowed to generatean ensembleof initial perturbations(Houtekameret al.
1996).A numberof paralleldataassimilationcyclesis runrandomlyperturbingtheobservations,andusingdiffer-
entparameterisationschemesfor somephysicalprocessesin eachrun.Theensembleof initial statesgeneratedby
the differentdataassimilationcyclesdefinesthe initial conditionsof the Canadianensemblesystem.Moreover,
forecastsstartedfrom suchanensembleof initial conditionsareusedto estimateforecast-errorstatistics(Evensen
1994,Houtekamer & Mitchell 1998).
Ensembleprediction,whichcanbeconsideredoneof themostrecentadvancesin numericalweatherprediction,is
thefirst topic discussedin this work. Thedevelopmentof objective proceduresto targetadaptive observationsis
the second topic on which attention will be focused.
Theideaof targetingadaptiveobservationsis basedonthefactthatweatherforecastingcanbeimprovedby adding
extra observationsonly in sensitive regions.Thesesensitive regionscanbe identifiedusingtangentforwardand
adjointversionsof numericalweatherpredictionmodels(Thorpeet al. 1998,Buizza& Montani1999).Oncethe
sensitive regionshave beenlocalised,instrumentscanbesentto thoselocationsto take therequiredobservations
usingpilot-lessaircraft,or energy-intensive satelliteinstrumentscanbeswitchedon to samplethemwith greater
accuracy.
After this Introduction,section2 describessomeearlyresultsby Lorenz,andillustratesthechaoticbehavior of a
simple3-dimensionsystem.In section3 themainstepsof numericalweatherpredictionaredelineated.Theimpact
of initial conditionandmodeluncertaintieson numericalintegrationis discussedin section4. TheECMWF En-
semblePredictionSystemis describedin section5. Targetingadaptive observationsusingsingularvectorsis dis-
cussedin section6. Someconclusionsarereportedin section7. Somemathematicaldetailsarereportedin two
Appendices.
2. THE LORENZ SYSTEM
Oneof thefathersof chaostheoryis EdwardLorenz(1963,1965).Resultsfrom the3-dimentionalLorenzsystem
(1)
illustratethedispersionof finite time integrationsfrom anensembleof initial conditions(Fig. 3 ). Thedifferent
initial pointscanbeconsideredasestimatesof the“true” stateof thesystem(whichcanbethoughtof asany point
insideellipsoid),andthetime evolution of eachof themaspossibleforecasts.Subjectto theinitial “true” stateof
thesystem,pointsclosetogetherat initial timedivergein timeatdifferentrates.Thus,dependingonthepointcho-
sen to describe the system time evolution, different forecasts are obtained.
Thetwo wingsof theLorenzattractorcanbeconsideredasidentifyingtwo differentweatherregimes,for example
onewarmandwetandtheothercoldandsunny. Supposethatthemainpurposeof theforecastis to predictwhether
thesystemis going througha regimetransition.Whenthesystemis in a predictableinitial state(Fig. 3 (a)), the
˙ = σ
– σ +
˙ = – –+ ˙ = –

Chaos and weather prediction
6 Meteorological Training Course Lecture Series
ECMWF, 2002
rateof forecastdivergeis small,andall thepointsstayclosetogethertill thefinal time.Whatever thepointchosen
to representtheinitial stateof thesystem,theforecastis characterisedby asmallerror, andacorrectindicationof
a regimetransitionis given.Theensembleof pointscanbeusedto generateprobabilisticforecastsof regimetran-
sitions.In this case,sinceall pointsendin theotherwing of theattractor, thereis a 100%probabilityof regime
transition.
Figure 3. Lorenz attractor with superimposed finite-time ensemble integration.
By contrast,whenthesystemis in alesspredictablestate(Fig.3 (b)), thepointsstayclosetogetheronly for ashort
timeperiod,andthenstartdiverging.While it is still possibleto predictwith agooddegreeof accuracy thefuture
forecaststateof thesystemfor a shorttime period,it is difficult to predictwhetherthesystemwill go througha
regimetransitionin the long forecastrange.Fig. 3 (c) shows anevenworsescenario,with pointsdiverging even
aftera shorttime period,andendingin very distantpartof thesystemattractor. In probabilisticterms,onecould
haveonly predictedthatthereis a50%chanceof thesystemundergoingaregimetransition.Moreover, theensem-
ble of pointsindicatesthatthereis a greateruncertaintyin predictingtheregion of thesystemattractorwherethe
system will be at final time in the third case (Fig. 3(c)).
Thecomparisonof thepoints’divergenceduringthethreecasesindicateshow ensemblepredictionsystemscanbe
usedto “forecasttheforecastskill”. In thecaseof theLorenzsystem,asmalldivergenceis associatedto apredict-
ablecase,andconfidencecanbeattachedto any of thesingledeterministicforecastsgivenby thesinglepoints.By
contrast, a large diverge indicate low predictability.

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 7
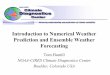
Figure 4. ECMWF forecasts for air temperature in London started from (a) 26 June 1995 and (b) 26 June 1994.
Similarsensitivity to theinitial stateis shown in weatherprediction.Fig. 4 showstheforecastsfor air temperature
in Londongivenby 33 differentforecastsstartedfrom very similar initial conditionsfor two differentdates,the
26thof Juneof 1995andthe26thof June1994.Thereis acleardifferentdegreeof divergenceduringthetwo cases.
All forecastsstayclosetogetherup to forecastday10 for thefirst case(Fig. 4 (a)),while they all divergealready
at forecastday3 in thesecondcase(Fig. 4 (b)). Thelevel of spreadamongthedifferentforecastscanbeusedasa
measure of the predictability of the two atmospheric states.
3. NUMERICAL WEATHER PREDICTION
Numericalweatherpredictionis realisedby integratingprimitive-equationmodels.Theequationsaresolvedby re-
placingtime-derivativesby finite differences,andspatiallyeitherby finite differenceschemesor spectralmethods.
Thestateof theatmosphereis describedat a seriesof grid-pointsby a setof statevariablessuchastemperature,
velocity, humidity and pressure.
At thetimeof writing (December1999)theECMWFhigh-resolutiondeterministicmodelhasaspectraltriangular
truncationTL319,which is equivalentto agrid-pointspacingof about60km atmid-latitudes(Fig. 5 ) and60ver-
tical levels (Fig. 6).
3
0
28
2
6
2
4
22
20
18
16
14
12
10
8
0
1 2
3
4
5
6
7
8
9
10Forecast day
Deg
ree
C
UK
C
ontrol A
nalysis Ensemble
ECMWF ensemble forecast - Air temperatureDate: 26/06/1995 London Lat: 51.5 Long: 0
3
4
3
0
2
8
2
6
24
2
2
2
0
18
16
14
12
10
0
1 2
3
4
5
6
7
8
9
10Forecast day
Deg
ree
C
UK
C
ontrol A
nalysis Ensemble
ECMWF ensemble forecast - Air temperatureDate: 26/06/1994 London Lat: 51.5 Long: 0

Chaos and weather prediction
8 Meteorological Training Course Lecture Series
ECMWF, 2002
Figure 5. Grid-points over Europe of the ECMWF model.
Figure 6. Vertical levels of the ECMWF model.
0
.1
0
.3
0
.5
1
35
10
5
0
100
2
003
00
5
007
001000
Pre
ssur
e (h
Pa)
1
2
3456 78!9"11131517192
1232527
3
13
53
94
45
0
Leve
l num
ber

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 9
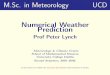
Figure 7. Type and number of observations used to estimate the atmosphere initial conditions in a typical day.
Figure 8. Map of radiosonde locations.
Meteorologicalobservationsmadeall over theworld (Fig. 7 ) areusedto computethebestestimateof thesystem
initial conditions.Someof theseobservations,suchastheonesfrom weatherballoonsor radiosondes,aretakenat
specifictimesatfixedlocations(Fig.8 ). Otherdata,suchastheonesfrom aircrafts,shipsor satellites,arenotfixed
in space.Generallyspeaking,thereis a greatvariability in thedensityof theobservationnetwork. Dataover oce-
anic regions, in particular, are characterised by very coarse resolution.
Observationscannotbeuseddirectly to startmodelintegration,but mustbemodifiedin a dynamicallyconsistent
wayto obtainasuitabledataset.Thisprocessis usuallyreferredto asdataassimilation.At thetimeof writing (De-
cember1999),ECMWF usesa 4-dimensionaldataassimilationschemeto estimatetheactualstateof theatmos-
phere (Courtieret al. 1994).
In the ECMWF model,dynamicalquantitiesaspressureandvelocity gradientsareevaluatedin spectralspace,
while computationsinvolving processessuchasradiation,moistureconversion,turbulence,arecalculatedin grid-
point space.This combinationpreservesthe local natureof physicalprocesses,andretainsthesuperioraccuracy
of the spectral method for dynamical computation.
The physical processesassociatedwith radiative transfer, turbulent mixing, moist processes,areactive at scales
smallerthanthehorizontalgrid size.Theapproximationof unresolvedprocessesin termsof model-resolvedvari-
ablesis referredto asparameterisation(Fig. 9 ). Theparameterisationof physicalprocessesis probablyoneof the
G#
eo-stationarys$ atellitesERS-2
3%
82,299
P&
olar-orbiting satellites
C'
loudm( otionv) ectorS*
AT+
O,
B2-
6,674S*
ATEMTO,
VS
TEMP 1,234Pilot 737
Profilers5.
55Buoys - d
/rifting 6
0,106
moored 469
S*
HIP 4,706
AIREPAMDAR 5
.5,921
ACAR
91
4,9852
S*
YNOP44,616
Data Coverage (o_suite) - TEMP 1200 UTC 970217 Total number of obs = 558
60OS
30OS
0O
30O3N
60ON
150OW 120O3W 90OW 60O
3W 30OW 0O 30OE 60O
3E 90OE 120O
3E 150OE
Observation Type542 LAND13 SHIP3 DROPSONDE

Chaos and weather prediction
10 Meteorological Training Course Lecture Series
ECMWF, 2002
most difficult and controversial area of weather modelling (Holton 1992).
Figure 9. Schematic diagram of the different physical processes represented in the ECMWF model.
4. SOURCES OF FORECAST ERROR
It hasbeenalreadymentionedthatuncertaintiesin theinitial conditionsandin themodelarebothsourcesof fore-
casterror. Someindicationsof therelativeimportanceof thetwo sourcescanbededucedfrom theworksof Down-
ton & Bell (1988) and Richardson(1998), who comparedforecastsgiven by the UKMO (United Kingdom
MeteorologicalOffice)andtheECMWFforecastingsystems.In thesestudies,substantialforecastdifferencesbe-
tweentheECMWF andtheUKMO operationalforecastscouldmostlybe tracedto differencesbetweenthe two
operationalanalyses,ratherthanbetweenthetwo forecastmodels.Ontheotherhand,recentresultsfrom Harrison
et al. (1999) indicate that the impact of model uncertainties on forecast error cannot be ignored.
Theseresultssuggestthatanensemblesystemshouldcertainlysimulatethepresenceof uncertaintiesin theinitial
conditions, since this is the dominant effect, but it should also simulate model uncertainties.
Thefirst versionof theECMWF EnsemblePredictionSystem(hereafterEPS,Palmeret al. 1993,Molteni et al.
1996)implementedoperationallyin December1992includedonly a simulationof initial uncertainties.A similar
“perfectmodel” strategy wasfollowedat theUS NationalCentersfor EnvironmentalPrediction(NCEP, Tracton
& Kalnay 1993).
Houtekameret al. (1996)first includedmodeluncertaintiesin theensemblepredictionsystemdevelopedattheAt-
mosphericEnvironmentServicein Canada.Following asystemsimulationapproachto ensembleprediction,they
developeda procedurewhereeachensemblememberdiffersboth in the initial conditions,andin sub-gridscale
parameters.In thisapproach,eachensemblememberis integratedusingdifferentparameterizationsof horizontal
diffusion, convection, radiation, gravity wave drag, and with different orography.
Therearecertainlygoodgroundsfor believing thatthereis asignificantsourceof randomerrorassociatedwith the
parameterizedphysical processes.For example,considera grid point over the tropical warm pool areaduring a

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 11
periodof organizeddeepconvection.By definition,theactualcontributionsto thetendenciesdueto parameterized
physicalprocessesareoftenassociatedwith organizedmesoscaleconvectivesystemswhosespatialextentmaybe
comparablewith themodelresolution.In suchacase,thenotionof aquasi-equilibriumensembleof sub-grid-scale
processes,uponwhich all currentparameterizationsschemesarebased,cannotbea fully-appropriateconceptfor
representingtheactualparameterizedheating(Palmer1997). For example,evenif theparameterizedheatingfields
agreeonaverage(i.e.overmany timesteps)at thechosengrid point, theremustinevitably besomestandarddevi-
ation in the time-step by time-step difference between observed and modeled heating.
SinceOctober1998,asimplestochasticschemefor simulatingrandommodelerrorsdueto parameterizedphysical
processeshasbeenusedin theECMWFEPS(Buizzaet al. 1999).Theschemeis basedon thenotionthatthesort
of randomerror in parameterizedforcing arecoherentbetweenthedifferentparameterizationmodules,andhave
certaincoherenceonthespaceandtimescalesassociated,for example,with organizedconvectionschemes.More-
over, theschemeassumesthatthelargertheparameterizedtendencies,thelargertherandomerrorcomponentwill
be.Thenotionof coherencebetweenmodulesallows thestochasticperturbationto bebasedon thetotal tendency
from all parameterizedprocesses,ratherthanontheparameterizedtendenciesfrom eachof theindividualmodules.
In thisrespecttheECMWFschemediffersconceptuallyfrom thatof Houtekameret al. (1996).Moredetailsabout
the scheme are reported in the following section.
5. THE ECMWF ENSEMBLE PREDICTION SYSTEM
Routinereal-timeexecutionof theECMWFEPSstartedin December1992with a31-memberT63L19configura-
tion (spectraltriangulartruncationT63 and19 vertical levels,Palmeret al. 1993,Molteni et al. 1996).A major
upgradetoa51-memberTL159L31system(spectraltriangulartruncationT159with lineargrid) tookplacein 1996
(Buizzaet al. 1998).A schemeto simulatemodeluncertaintiesdueto randommodelerror in theparameterized
physical processes was introduced in 1998.
5.1 The original EPS configuration
Schematically, each ensemble member was defined by the time integration
(2)
of the model equations
(3)
starting from perturbed initial conditions
(4)
where and identify thecontributionto thefull equationtendency of thenon-parameterizedandparameterized
physical processes, and where is the operational analysis at .
Theinitial perturbations weregeneratedusingthesingularvectorsof thelinearversionof theECMWF,
computedto maximizethetotal energy normover a 48-hourtime interval (Buizza& Palmer1995),andscaledto
have an amplitude comparable to analysis error estimates.
465
47598( ) : 475;8,( ) < 475;8,( )+[ ] d8== 0
=∫=
∂ 475∂ 8-------- : 475;8,( ) < 465>8,( )+=
46598 = 0( ) 408 = 0( ) δ47598 = 0( )+=
: < 408 = 0( ) 8 = 0
δ475?8 = 0( )

Chaos and weather prediction
12 Meteorological Training Course Lecture Series
ECMWF, 2002
Thesingularvectorsof thetangentforwardpropagatorsamplethephasespacedirectionsof maximumgrowth dur-
ing a48-hourtimeinterval.Smallerrorsin theinitial conditionsalongthesedirectionswouldamplify mostrapidly,
andaffect theforecastaccuracy. Thereaderis referredto AppendixA for amorecompletemathematicaldefinition
of the singular vectors.
Fig. 10 illustratesthetypical structureof theleadingsingularvectorusedto generatetheensembleof initial per-
turbationsfor 17January1997.Totalenergy singularvectorsareusuallylocatedin thelower troposphereat initial
time, with total energy peakingat betweenaround700hPa (i.e. around3000m), in regionsof strongbarotropic
andbaroclinicenergy conversion(Buizza& Palmer1995).Duringtheirgrowth, they show anupscaleenergy trans-
fer andupwardenergy propagation.Resultshave indicatedaverygoodagreementbetweentheregionswheresin-
gularvectorsarelocatedandothermeasuresof baroclinicinstabilitysuchastheEadyindex introducedby Hoskins
& Valdes(1990).This is shown in Fig. 11 for thecaseof 17January1997.Thereaderis referredto Hoskinset al.
(1999) for recent investigations on singular vector growth mechanisms.
Figure 10.Mostunstablesingularvectorgrowing between17and19January1997at initial (left panels)andfinal
(right panels) times. The top panels show the singular vector temperature component (shaded blue/green for
negativeandshadedyellow/redfor positivevalues)andtheatmosphericstate(geopotentialheight)at500hPa(i.e.
approximately at 5000 m). Bottom panels are as top panels but for 700 hPa (i.e. approximately at 3000 m).
Contourinterval is 8 damfor geopotentialheight,and0.2degreesfor temperatureat initial timeand1.0degreeat
final time.
4@ 965A 12
528
544
5B 44
560
5C 60 576
SD
V_1(T)/Z 500hPa 1997-01-18 12h
4965E 12
528
5F 44
544
5G 60
5H 60
5I 76
576
SJ
V_1(T)/Z 500hPa 1997-01-20 12h
2K 7L 2K272
288
2M 88 3N 04
304
SJ
V_1(T)/Z 700hPa 1997-01-18 12h
2O 72
272
2P 88 3Q 04
304
SJ
V_1(T)/Z 700hPa 1997-01-20 12h

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 13
Figure 11.Eadyindex (toppanel)andlocationof theleadingsingularvectorsidentifiedby theroot-mean-square
amplitude of the EPS perturbations at forecast day 1 (bottom panel) for the case of 17 January 1997. Contour
interval is 1 day-1 for the Eady index, and 1 m for the EPS perturbation amplitude.
Until 26 March1998,theEPSinitial perturbationswerecomputedto sampleinstabilitiesgrowing in theforecast
range,andno accountwastakenof perturbationsthathadgrown duringthedataassimilationcycle leadingup to
the generation of the initial conditions (Molteni et al. 1996).
A way to overcome this problem is to use singular vectors growing in the past, and evolved to the current time.
The 50 perturbedinitial conditionsweregeneratedby addingandsubtracting25 perturbationsdefinedusing25
singularvectorsselectedfrom computedsingularvectorssothatthey donotoverlapin space.Theselectioncriteria
werethattheleading4 singularvectorsarealwaysselected,andthatsubsequentsingularvectorsareselectedonly
if less than 50% of their total energy cover a geographical region where already 4 singular vectors are located.
Oncethe25 singularvectorswereselected,anorthogonalrotationin phase-spaceanda final re-scalingwereper-
formedto constructtheensembleperturbations.Thepurposeof thephase-spacerotationis to generateperturba-
tionswith thesamegloballyaveragedenergy asthesingularvectors,but smallerlocalmaximaandamoreuniform
spatialdistribution.Moreover, unlike thesingularvectors,therotatedsingularvectorsarecharacterizedby similar
amplificationrates(at leastup to 48 hours).Thus,therotatedsingularvectorsdiverge,on average,equallyfrom
thecontrolforecast.Therotationis definedto minimizethelocal ratiobetweentheperturbationamplitudeandthe
amplitudeof theanalysiserrorestimategivenby theECMWFdataassimilationprocedure.There-scalingallowed
perturbations to have local maxima up to larger than the local maxima of the analysis error estimate.
A wayto takeintoaccountperturbationsgrowingduringthedataassimilationperiodwastogeneratetheEPSinitial
perturbationusingtwo setsof singularvectors.In mathematicalterms,since26 March 1998(Barkmeijeret al.
1
1
1
1R
1S1
1
1
1T1 1
2U
2
Eady index 1997-01-18/20
EPS 500hPa Z 1997-01-18 12h fc t+24
α 0.6=

Chaos and weather prediction
14 Meteorological Training Course Lecture Series
ECMWF, 2002
1999a)theday initial perturbationshavebeengeneratedusingboththesingularvectorsgrowing in theforecast
rangebetweenday andday at initial time, andthesingularvectorsthathadgrown in thepastbetween
day and day at final time
(5)
where is thei-th singularvectorgrowing betweendayd andd+2at time t=0. Thecoefficientsai,j
andbi,j settheinitial amplitudeof theensembleperturbations,andaredefinedby comparingthesingularvectors
with estimatesof analysiserrors(Molteni et al. 1996).Since26 March1998,theselectioncriteriahasbeenkept
as before, but a new scaling factor has been used.
Theinitial perturbationsarespecifiedin termsof thespectralcoefficientsof the3-dimensionalvorticity, divergence
andtemperaturefields(noperturbationsaredefinedfor thespecifichumiditysincethesingularvectorcomputation
is performedwith a dry linear forward/adjointmodel),andof the2-dimensionalsurfacepressurefield. They are
addedandsubtractedto thecontrol initial conditionsto defineperturbedinitial conditions.Then,50 + 1 (control)
10-day TL159L31 non-linear integrations are performed.
With the current ECMWF computerfacilities, eachday the whole EPS (10-day integration, 51 membersat
TL159L40with T42L40singularvectorscomputedfor theNorthernandtheSouthernHemispheres)takesapprox-
imately150hoursof totalcomputingtime(about10%of this timeis usedto computetheinitial perturbations).By
contrast,the high resolutionTL319L60deterministicforecast(10-dayintegration)takesabout40 hours,andthe
dataassimilationprocedureusedto generatetheunperturbedinitial conditionstakesabout120hours(4 cyclesper
day, once every 6 hours).
5.2 The new EPS configuration
In October1998,a schemeto simulaterandommodelerrorsdueto parameterizedphysicalprocessedwasintro-
duced(Buizzaet al. 1999).This schemecanbeconsideredasa simplefirst attemptto simulatedrandommodel
errorsdueto parametrizedphysical processes.It is basedon thenotion that randomerrorsdueto parametrized
physicalprocessesarecoherentbetweenthedifferentparametrizationmodulesandhaveacertaincoherenceonthe
spaceandtime scalesrepresentedby themodel.Theschemeassumesthatthelargertheparametrizedtendencies,
the larger the random error component.
In the new EPS, each ensemble member can be seen as the time integration
(6)
of the perturbed model equations
(7)
startingfrom theperturbedinitial conditionsdefinedin Eq. (1), where and identify thecontribution to the
full equationtendency of the non-parameterizedand parameterizedphysical processes.For eachgrid point
(identifiedby its latitude,longitudeandvertical hybrid coordinate),the perturbedparameterized
tendency (of each state vector component) is defined as
VV V
2+V2–
V
δ47598 = 0( ) α W 5, ν WXYX 2+, 8 = 0( ) βW 5, ν WX 2 X,– 8 = 48 h( )+[ ]W = 1
25
∑=
ν WXYX 2+, 8 = 0( )
α 0.5=
475
475?8( ) : 475;8,( ) < 5 ′ 475;8,( )+[ ] d8== 0
=∫=
∂ 475∂ 8-------- : 475;8,( ) < 5 ′ 475;8,( )+=
: < ′
Z λ φ σ, ,( )=

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 15
(8)
where is theunperturbeddiabatictendency, and indicatesthatthesamerandomnumber hasbeen
used for all grid points inside a degree box and over time steps.
Thenotionof space-timecoherenceassumesthatorganizedsystemshavesomeintrinsicspaceandtime-scalesthat
mayspanmorethanonemodeltime stepandmorethanonemodelgrid point.Making thestochasticuncertainty
proportionalto thetendency is basedontheconceptthatorganization(awayfrom thenotionof aquasi-equilibrium
ensembleof sub-grid processes)is likely to bestronger, thestrongeris theparameterizedcontribution. A certain
space-timecorrelationis introducedin orderto have tendency perturbationswith thesamespatialandtime scales
as observed organization.
Figure 12. Random numbers used to perturb the tendencies due to parameterised physical processes. The top
panel shows the case of no spatial scale, in other words when different random numbers are used at each grid-
point.Thebottompanelshows thecasewhenthesamerandomnumberwasusedfor grid-pointsinside5-degree
boxes. Blue crosses identify grid-points with random numbers , green diamonds points with
, and red squares points with .
Fig.12 showsamapof therandomnumbersusedin aconfigurationtestedwhendevelopingtheso-calledstochas-
tic physicsscheme.Fig. 12 (a)shows thematrixof randomnumbers wheneachgrid-pointwasassignedanin-
dependentvalue,while Fig. 12 (b) shows the matrix whenthe samerandomnumberwasusedinside5 degree
boxes.Resultsindicatedthatevenperturbationswithoutany spatialstructure(i.e.with randomnumbersasin Fig.
< 5 ′ 475;8,( ) 1 5 λ φ σ, ,( )⟨ ⟩ []\,+[ ] < 465;8,( )=
< …⟨ ⟩ [^\, 5_ _× `
40°Na
40°N
50°N 50°Nb60°Nc
60°N
30°W
30°W 20°W
20°W 10°W
10°W 0°
0° 10°E
10°E 20°E
20°E 30°E
30°E
No spatial scale
RED full squares: maximum DTp valuesGREEN diamonds: DTp values around 1.00BLUE crosses: minimum DTp values
40°Na
40°N
50°N 50°Nb60°Nc
60°N
30°W
30°W 20°W
20°W 10°W
10°W 0°
0° 10°E
10°E 20°E
20°E 30°E
30°E
5x5 deg spatial scaled
RED full squares: maximum DTp valuesGREEN diamonds: DTp values around 1.00BLUE crosses: minimum DTp values
MAGICS 6.0 bragi - ner Thu Nov 25 16:22:55 1999 R Buizza random__
0.5 η 0.3–≤ ≤–
0.1 η 0.1≤ ≤– 0.3 η 0.5≤ ≤
5

Chaos and weather prediction
16 Meteorological Training Course Lecture Series
ECMWF, 2002
12 (a)) had a major impact on 10-day model integrations (Buizzaet al. 1999).
After an extensive experimentation,it wasdecidedto implementin the operationalEPSthe stochasticphysics
schemewith randomnumberssampleduniformly in theinterval , a10degreesboxsize( ), and
a 6 hours time interval ( ).
6. TARGETED OBSERVATIONS
Considerameteorologicalsystemevolving betweentime and , localisedatfinal time insideageographical
area (hereafterverificationarea).Supposethatextraobservationscouldbetakeninsideageographicalarea
at initial time (hereafter target area), with the purpose of improving the time forecast inside .
Singularvectorswith maximumenergy atfinal timeinsideaverificationareacanbeusedto identify thetargetarea
whereextraobservationshouldbetaken,atinitial time,to reducetheforecasterrorinsidetheverificationareaitself
(Buizza& Montani1999).Thereaderis referredto AppendicesA andB for a morecompletedescriptionof the
mathematical formulation.
Otherstrategiescanbeusedto targetadaptiveobservations.Langland& Rohaly(1996),following thework of Ra-
bieret al. (1996)onsensitivity vectors,proposedto usethelowertroposphericvorticity of theforecaststateascost
function,andto targettheregionwherethesensitivity field is maximum.A similar technique,but basedontheuse
of aquasi-inverselinearmodel,wasproposedby Puet al. (1997,1998).Bishop& Toth (1998)introducedtheEn-
sembleTransformtechnique,in which linearcombinationsof ensembleperturbationsareusedto estimatethepre-
dictionerrorvarianceassociatedwith differentpossibledeploymentsof observationalresources.Finally, following
Hoskinset al. (1985)andAppenzelleret al. (1996),amoresubjectivestrategy basedon theuseof potentialvorti-
city to analyse atmospheric was also developed.
All thesetechniqueswereappliedto targetobservationsfor thefirst timeduringFASTEX, theFrontsandAtlantic
Storm Track Experiment (Joly et al. 1996,Thorpe & Shapiro 1995,Snyder 1996).
Thefocusof theFASTEX campaignwastheextra-tropicalcylonic stormsthatform over thewesternandmid At-
lantic Ocean,andtake about2 daysto developandmove towardsEurope.Forecastfailuresareoftenassociated
with these very active atmospheric phenomena.
Fig. 13 shows thetracksof oneof thestormsobservedduringFASTEX, IOP17(IOPstandsfor IntensiveObser-
vationPeriod),andthelocationof variousaircraftsthatmadeadditionalobservationsbetween17and19February
1997(Montaniet al. 1999).Singularvectors,computedto havemaximumtotalenergy insideaverificationregion
centredon theBritish Isles,wereusedto identify themostsensitive regionswhereobservationsweremade.The
comparisonof the centralpressureof two forecasts,onestartedfrom initial conditionscomputedwith andone
without theextra observations,with theobservedvalue(Fig. 14 ) indicatesthatadditional,targetedobservations
canimprove theforecastaccuracy. Fig. 15 shows theaverageimpactof thetargetedobservationson theforecast
error. Results indicated up to 20% forecast error reduction.
0.5 0.5,–[ ]_
10=
` 6=
80
8 8Σ= Σ08
08 Σ

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 17
Figure 13.MapsummarisingtheextraobservationstakenduringtheFASTEX experimentfor IOP17.Theblack
track identifies the location of the cyclone minimum pressure, the coloured tracks the aircraft missions, and the
red symbols additional radio-soundings (fromMontaniet al. 1999).
Figure 14. 6-hourly time series of the cyclone central pressure forecast without (blue dash line) and with (red
dotted line) extra observations, and observed (black solid line), for IOP 17 (fromMontaniet al. 1999).
0e
6f
12 18 24 30 36 42forecast time (hrs)
9g
50
9g
60
9g
70
9g
80
9g
90
1000
1010
1020
msl
p (h
Pa)
Th
imeseries of meansealevel pressureInitial time: 18Z, 17 February 1997
analysiscontrol forecastpi erturbed forecast

Chaos and weather prediction
18 Meteorological Training Course Lecture Series
ECMWF, 2002
Figure 15. Scatter plot of the mean forecast errors with (x-axis) and without (y-axis) the extra observations, for
the500and1000hPageopotentialheightfieldsoverEuropeandNorthAtlantic at forecastday2, 2.5and3 (from
Montaniet al. 1999).
Following theFASTEX campaign,otherexperimentswereperformed(e.g.NORPEX,theNorth Pacific Experi-
ment,CALJET, theCaliforniaLand-falling Jetsexperiments).All resultsconfirmedthattakingextraobservations
in sensitive regions could reduce forecast errors.
Roboticaerosondescapableof long-rangemonitoringcouldbeusedoperationallyin averynearfuturetofill chron-
ic gapsin theglobalupper-air soundingnetwork (Hollandet al. 1992),andtake extra observationsin objectively
identifiedregions.This followsyearsof intensive researchat theBureauof Meteorologyof Melbourne,Australia,
that culminatedwith the first-ever unmannedaircraft crossingof the Atlantic Oceanin August 1998 (http://
www.aerosonde.com/opshist.htm).
7. SUMMARY AND FUTURE DEVELOPMENTS
Two of themostimportantadvancesin numericalweatherpredictionof the last10 years,theoperationalimple-
mentationof ensemblepredictionsystemsandthedevelopmentof objective techniquesto targetadaptiveobserva-
tions, have been discussed.
Ensemblesystemsprovideapossibleway to estimatetheprobabilitydistribution functionof forecaststates.They
have beendevelopedfollowing thenotionthatuncertaintiesin theinitial conditionsandin themodelformulation
arethemainsourcesof forecasterrors.Resultshavedemonstratedthataprobabilisticapproachto weatherpredic-
tion can provide more information than a deterministic approach based on a single, deterministic forecast.
Ensemblepredictionsystemsareparticularlyuseful,if notnecessary, to provideearlywarningsof extremeweather
events.For example,ensemblesystemscanbeusedto predictprobabilitiesof intenseprecipitationevents(Fig. 16
). Globalensemblesystemscanbeusedto provide boundaryandinitial conditionsfor higher-resolution,limited
area ensemble prediction systems (Molteni et al. 1999,Marsigli et al. 1999).
60
50
40
30
20
10
00
With
outD
rops
onde
s
10 20 30 40 50 60With Dropsondes (rms error in metres)

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 19
Figure 16. High-resolution TL319L31 forecasts for the flood in Piemonte, Italy, 5-6 November 1994. (a)
Precipitation forecast, accumulated between t+96 h and t+120 h, predicted by the control forecast. (b) Observed
precipitation field. (c) Ensemble probability forecast of more than 20 mm/d of precipitation. (d) Ensemble
probability forecast of more than 40 mm/d of precipitation. Contour isolines 2, 20, 40 and 100 mm/d for
precipitation, and every 20% for probabilities.
At ECMWF, work is in progressin many differentareasto furtherimprovethecurrentensemblepredictionsystem.
Linearizedversionsof themostimportantphysicalprocesseshavebeendeveloped(Mahfouf1999),andinvestiga-
tion into thebehaviour of thelinearmodelsin thecomputationof tropicalsingularvectorshasstarted.Thetropical
targetareahasbeenchosenbecausethecurrentEPSlacksperturbationsof theinitial conditionin thisarea,where
moistprocessesareof key importance.Results(Barkmeijeret al. 1999b,Puriet al. 1999)indicatethattheinclusion
of tropicalsingularvectorsis essentialin casesof hurricaneprediction.Resultsindicatethattropicalsingularvec-
tors are needed to generate a realistic spread among the ensemble of hurricane tracks.
The operationalinitial perturbationsof the ECMWF EPSareconstructedusingsingularvectorswith maximum
totalenergy growth. Totalenergy singularvectorshavenoknowledgeof analysiserrorstatistics.Generallyspeak-
ing, it wouldbedesirableto useinformationaboutanalysiserrorcharacteristicsin thesingularvectorcomputation.
Onewayof improving uponthis is to usein thesingularvectorcomputationstatisticsgeneratedby thedataassim-
ilation system.Work is in progressto usetheHessianof thecostfunctionof the3-dimensional(or 4-dimensional)
variationalassimilationsystem(3D/4D-Var) to definesingularvectors(Barkmeijeret al. 1998). Theseso-called
Hessiansingularvectorsareconstrainedat initial timeby analysiserrorstatisticsbut still producefastperturbation
growth during the first few days of the forecast.
Work is in progressto investigatewhethera so-calledconsensusanalysis,definedastheaverageof analysespro-
ducedby differentweathercentres,is a betterestimateof theatmosphericinitial statethantheECMWF analysis
(Richardson,1999,personalcommunication).TheoperationalEPSconfigurationhasbeenrunfrom theconsensus
analysis,averageof theECMWF, UKMO (UK MeteorologicalOffice), Météo-France,NCEP(NationalCenters
for EnvironmentalPrediction,Washington)andDWD (DeutscherWetterDienst,Offenbach)analyses.Thesame
perturbationsasusedin theoperationalEPShave beenaddedto theconsensusanalysisto createthe50 perturbed
initial conditions.Preliminaryresultsshow thattheskill of thecontrolforecastis improvedif theconsensusanal-
ysisis usedinsteadof theECMWFanalysisastheunperturbedinitial condition.Resultsalsoindicatethatthedif-
ferencebetweenthe spreadin the two systemsis rathersmall,while the ensemble-meanforecastof the system
CON FC: 1994-11-01 12h fc t+120 24H OBSERVED PRECIP: 1994-11-05/06
PROB 20 mm: 1994-11-01 12h fc t+120 PROB 40 mm: 1994-11-01 12h fc t+120
0°
40°N
10°E
20°E
0°
40°N
10°E
20°E
0°
40°N
10°E
20°E
0°
40°N
10°E
20°E
2j 2k
2l
20
4m 0
2n
2o
2p 0
20
20
40
4q 02r 0

Chaos and weather prediction
20 Meteorological Training Course Lecture Series
ECMWF, 2002
started from the consensus analysis is more skilful.
Experimentationhasstartedto verify whetheraresolutionincreasefrom Tl159to Tl255,andfrom 31to 60vertical
levelswould improve theEPSperformance.Preliminarystudiesof theimpactof anincreasein horizontalresolu-
tion indicate that precipitation prediction improves substantially as resolution increases.
Finally, anensembleapproachto dataassimilationis undertest.Following Houtekameret al. (1996),but with the
ECMWFapproachto representmodeluncertainties,work hasstartedatECMWFto generateanensembleof initial
perturbationsusingtheECMWF 3D/4D-Var dataassimilation.Thepurposeof this work is to investigatewhether
a better estimate of the “true” state of the atmosphere can be computed using this probabilistic approach.
8. CONCLUSION
The weather is a chaotic system, and numerical weather prediction is a very difficult task.
Thiswork hasdemonstratedthattheapplicationof linearalgebra(i.e.theuseof singularvectorscomputedby solv-
ing aneigenvalueproblemdefinedby thetangentforwardandadjointversionsof themodel)to meteorologycan
help in designing new ways to numerical weather prediction (Buizza 1997).
Thesametechniquecanbeappliedto any dynamicalsystem,in particularto very complex systemswith a large
dimension.Thebasicideais that thereareonly few, importantdirectionsof thephase-spaceof any systemalong
which the most importantprocessesoccur. A successfulpredictionof the systemtime evolution shouldsample
these directions, and describe the system evolution along them.
9. ACKNOWLEDGEMENTS
TheECMWFEnsemblePredictionSystemis theresultof thework of many ECMWFstaff membersandconsult-
ants.It is basedontheIntegratedForecastingSystem/Arpegesoftware,developedin collaborationby ECMWFand
Meteo-France.Thework of many ECMWFandMeteo-Francestaff andconsultantsis acknowledged.I amgrateful
to Robert Hine for all his editorial help.
APPENDIX A SINGULAR VECTOR DEFINITION
Farrell (1982),studyingthegrowth of perturbationsin baroclinicflows, showed that,althoughthe long time as-
ymptoticbehavior is dominatedby discreteexponentiallygrowing normalmodeswhenthey exist, physically real-
istic perturbationscouldpresent,for somefinite time intervals,amplificationratesgreaterthanthemostunstable
normal modeamplificationrate.Subsequently, Farrell (1988,1989) showed that perturbationswith the fastest
growth over a finite time interval couldbeidentifiedsolvingtheeigenvalueproblemof theproductof thetangent
forwardandadjointmodelpropagators.His resultssupportedearlierconclusionsby Lorenz(1965)thatperturba-
tion growth in realistic models is related to the eigenvalues of the operator product.
Kontarev(1980)andHall andCacuci(1983)first usedthe adjoint of a dynamicalmodelfor sensitivity studies.
Lateron,LeDimet& Talagrand(1986)proposedanalgorithm,basedonanappropriateuseof anadjointdynamical
equation,for solvingconstraintminimizationproblemsin thecontext of analysisandassimilationof meteorolog-
ical observations.More recently, Lacarra& Talagrand(1988)appliedtheadjoint techniqueto determineoptimal
perturbationsusinga simplenumericalmodel. Following Urban(1985)they useda Lanczosalgorithm(Strang,
1986) in order to solve the relatedeigenvalueproblem.For a bibliography in chronologicalorderof published
works in meteorology dealing with adjoints up to the end of 1992, the reader is referred toCourtieret al. (1993).

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 21
After Farrell andLorenz,calculationsof perturbationsgrowing over finite-timeintervalswereperformed,for ex-
ample,by Borges& Hartmann(1992)usingabarotropicmodel,andby Molteni & Palmer(1993)usingabarotrop-
ic anda 3-level quasi-geostrophicmodelat spectraltriangulartruncationT21. Buizza(1992)andBuizzaet al.
(1993) first identified singular vectors in a primitive equation model with a large number of degrees of freedom.
Let be the state vector of a generic autonomous system, whose evolution equations can be formally written as
(9)
Denoteby an integrationof Eq. (9) from to , which generatesa trajectoryfrom an initial point to
. Thetimeevolutionof asmallperturbationx aroundthetimeevolving trajectory canbedescibed,
in a first approximation, by the linearized model equations
(10)
where is the tangent operator computed at the trajectory point.
Let betheintegralforwardpropagatorof thedynamicalequationslinearizedaboutanon-lineartrajectory
(11)
thatmapsaperturbation at initial time to theoptimizationtime . Thetangentforwardoperator mapsthe
tangent space , the linear vector space of perturbations at, to , the linear vector space at .
Considertwo perturbations and , e.g.at , apositivedefiniteHermitianmatrix , anddefinetheinnerprod-
uct as
(12)
on the tangent space in this case, where identifies the canonical Euclidean scalar product,
(13)
Let be the norm associated with the inner product
(14)
Let be the adjoint of with respect to the inner product ,
(15)
Theadjointof with respectto theinnerproductdefinedby canbewritten in termsof theadjoint defined
with respect to the canonical Euclidean scalar product,
χ
∂χ∂ 8------ : χ( )=
χ 8( ) 80
8 χ0
χ1 χ 8( )= χ 8( )
∂Z∂ 8------ :?s Z=
:9s ∂: Z( )∂Z---------------
χ =( )= χ 8( )
t 8u80,( )
χ 8( )
Zv8( )t 8w8
0,( ) Zv8 0( )=
Z 80
8 tΠ0 χ0 Π1 χ1
Z x χ0 y… …;( ) z
Zx;( ) z Z y x;⟨ ⟩=
Π0 … …;⟨ ⟩
Zx;⟨ ⟩ Z W x WW 1=
|∑=
… z2 … …;( ) z
Z z2 ZZ;( ) z ZZ y;⟨ ⟩= =
t * z t… …;( ) z
t * z Zx;( ) z Z t x;( ) z=
t y t *

Chaos and weather prediction
22 Meteorological Training Course Lecture Series
ECMWF, 2002
(16)
FromEqs. (11) and(16) it follows that the squared norm of a perturbation at time is given by
(17)
Equation (17) shows that the problemof finding the phasespacedirections for which is
maximum can be reduced to the search of the eigenvectors
(18)
with the largest eigenvalues .
Thesquarerootsof theeigenvalues, , arecalledthesingularvaluesandtheeigenvectors the (right) sin-
gularvectorsof with respectto theinnerproduct (see,e.g.,Noble& Daniel,1977).Thesingularvectorswith
largestsingularvaluesidentify thedirectionscharacterizedby maximumgrowth. Thetimeinterval is called
optimization time interval.
Unlike itself, theoperator is normal. Hence,its eigenvectors canbechosento form a complete
orthonormalbasisin the -dimensionaltangentspaceof theperturbationsat . Moreover, theeigenvalues
are real, .
At optimization time , the singular vectors evolve to
(19)
which in turn satisfy the eigenvector equation
(20)
FromEqs. (17) and(20) it follows that
(21)
Sinceany perturbation canbewrittenasalinearcombinationof thesingularvectors , it follows
that
(22)
Thus, maximum growth as measured by the norm is associated with the dominant singular vector .
Giventhetangentforwardpropagator , it is evident from Eq. (18) thatsingularvectors'characteristicsdepend
strongly on the inner product definition and to the specification of the optimization time interval.
Theproblemcanbegeneralizedby selectinga differentinnerproductat initial andoptimizationtime. Consider
two innerproductsdefinedby the(positive definiteHermitian)matrices and , andre-statetheproblemas
finding the phase space directions for which
t * z y 1– t * y=
Z 8
Zv8( ) z2 Zv80( )t * z t Zv8
0( );( ) z=
Z Zv8( ) z2 Z~80( ) z2⁄
ν W 8 0( )
t * z t ν W 8 0( ) σW2ν W 8 0( )=
σW2σW ν W 8 0( )t y 88
0–
t t * z t ν W 8 0( )th χ0
σW2 0≥8
ν W 8( )t 8u8
0,( )ν W 8 0( )=
tt * z ν W 8( ) σW2ν W 8 0( )=
ν W 8( ) z2 σW2=
Zv8( ) Zv80( ) z⁄ ν W
max =0( )
Zv8( ) zZv80( ) z--------------------
σ1=
… z ν1t
y 0 yZ

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 23
(23)
is maximum. Applying the transformation , the right hand side ofEq. (18) can be transformed into
(24)
Since
(25)
the phasespacedirections which maximize the ratio in Eq. (24) are the singular vectors of the operator
with respectto thecanonicalEuclideaninnerproduct.With this definition,thedependenceof the
singular vectors' characteristics on the inner products is made explicit.
At ECMWF, dueto theverylargedimensionof thesystem,theeigenvalueproblemthatdefinesthesingularvectors
is solved by applying a Lanczos code (Glub & Van Loan 1983).
APPENDIX B PROJECTION OPERATORS
Thesetof differentialequationsthatdefinesthesystemevolution canbesolvednumericallywith differentmeth-
ods.For example,they canbesolvedwith spectralmethods,by expandinga statevectorontoa suitablebasisof
functions,or with finite-differencemethodsin which thederivativesin thedifferentialequationof motionsarere-
placedby finite differenceapproximationsatadiscretesetof grid pointsin space.TheECMWFprimitiveequation
model solves the system evolution equations partly in spectral space, and partly in grid point space.
Denoteby thegrid point representationof thestatevector , by thespectral-to-gridpoint transformation
operator, , andby themultiplicationof thevector , definedin grid-pointspace,by thefunction
:
(26)
where defines the coordinate of a grid point, and is a geographical region.
Define the function in spectral space as
(27)
where identifies a wave number and is a sub-space of the spectral space.
Consider a vector . The application of the local projection operator defined as
(28)
Zv8( ) zZ~80( ) z--------------------
t Zv80( ) y t Zv8 0( );⟨ ⟩Zv8
0( ) y 0Zv8
0( );⟨ ⟩----------------------------------------------=
x y 01 2⁄=
t y 01 2⁄– xv8
0( ) y t y 01 2⁄– xv8
0( );⟨ ⟩xv80( ) x~8 0( );⟨ ⟩
----------------------------------------------------------------------------xv8
0( ) y 01 2⁄– t * y t y 0
1 2⁄– xv80( );⟨ ⟩x~8
0( ) xv8 0( );⟨ ⟩------------------------------------------------------------------------------=
y 01 2⁄– t * y t y 0
1 2⁄– y 1 2⁄– t y 01 2⁄–( )
* y 1 2⁄– t y 01 2⁄–( )=
y 1 2⁄– t y 01 2⁄–
Z Z Z Z= Z Z
( )
Σ∉∀=Σ∈∀=
ssg
ssg
0)(
1)(
Σ( )
Ω∉∀=Ω∈∀=
nnw
nnw
0)(
1)(
ΩZ `
` 1– =

Chaos and weather prediction
24 Meteorological Training Course Lecture Series
ECMWF, 2002
to thevector setsthevector to zerofor all grid pointsoutsidethegeographicalregion . Similarly, theappli-
cationof thespectralprojectionoperator to thevector setsto zeroits spectralcomponentswith wavenumber
outside .
Theprojectionoperators and canbeusedeitherat initial or at final time,or at bothtimes.As anexample,
theseoperatorscanbeusedto formulatethefollowing problem:find theperturbationswith (i) thefastestgrowth
during the time interval , (ii) unitary -normandwave componentsbelongingto at initial time, (iii)
maximum -norminsidethegeographicalregion andwavecomponentsbelongingto atoptimizationtime.
This problem can be solved by the computation of the singular values of the operator
(29)
REFERENCES
Appenzeller, Ch.,Davies,H. C.,Popovic, J.M., Nickovic, S.,& Gavrilov, M. B., 1996:PV morphologyof a fron-
tal-wave development. Met. and Atm. Phys., 58, 21-40.
Barkmeijer, J.,vanGijzen,M., & Bouttier, F., 1998:Singularvectorsandestimatesof theanalysiserrorcovariance
metric. Q. J. R. Meteor. Soc., 124, 549, 1695-1713.
Barkmeijer, J.,Buizza,R., & Palmer, T. N., 1999a:3D-Var Hessiansingularvectorsandtheir potentialusein the
ECMWF Ensemble Prediction System. Q. J. R. Meteor. Soc., 125, 2333-2351.
Barkmeijer, J.,Buizza,R., Palmer, T. N., & Puri, K., 1999b:Tropicalsingularvectorscomputedwith linearized
diabatic physics. Q. J. R. Meteor. Soc., submitted.
Bishop, C. H., & Toth,Z., 1998:EnsembleTransformationandAdaptiveObservations.J.Atmos.Sci.,underrevi-
sion.
Borges, M., & Hartmann,D. L., 1992:Barotropicinstability andoptimal perturbationsof observed non-zonal
flows. J. Atmos. Sci., 49, 335-354.
Buizza, R., 1992:Unstableperturbationscomputedusingtheadjoint technique.ECMWF ResearchDepartment
Technical Memorandum No. 189, ECMWF, Shinfield Park, Reading RG2 9AX, UK.
Buizza, R., 1994: Sensitivity of Optimal Unstable Structures. Q. J. R. Meteorol. Soc., 120, 429-451.
Buizza, R., 1997:Thesingularvectorapproachto theanalysisof perturbationgrowth in theatmosphere.Ph.D.
thesis, University College London, Gower Street, London.
Buizza, R., & Palmer, T. N., 1995:Thesingular-vectorstructureof theatmosphericgeneralcirculation.J.Atmos.
Sci., 52, 9, 1434-1456.
Buizza, R., & Montani, A., 1999: Targeting observations using singular vectors. J. Atmos. Sci., 56, 2965-2985.
Buizza, R.,Tribbia,J.,Molteni,F., & Palmer, T. N., 1993:Computationof optimalunstablestructuresfor anumer-
ical weather prediction model. Tellus, 45A, 388-407.
Buizza, R., Petroliagis,T., Palmer, T. N., Barkmeijer, J.,Hamrud,M., Hollingsworth,A., Simmons,A., & Wedi,
N., 1998:Impactof modelresolutionandensemblesizeon theperformanceof anensemblepredictionsystem.Q.
J. R. Meteorol. Soc., 124, 1935-1960.
Buizza, R.,Miller, M., & Palmer, T. N., 1999:Stochasticsimulationof modeluncertainties.Q.J.R.Meteorol.Soc.,
125, 2887-2908.
Z Z Σ ZΩ
`
880– y 0 Ω0
y Σ Ω1
y 1 2⁄– ` 1
t 0y 0
1 2⁄–=

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 25
Charney, J. G., 1947: The dynamics of long waves in a baroclinic westerly current. J. Meteor., 4, 135-162.
Charney, J. G., 1948: On the scale of atmospheric motions. Geofys. Publ., 17, 1-17.
Courtier, P., Freydier, C.,Geleyn, J.-F., Rabier, F., & Rochas,M., 1991:TheArpegeprojectatMétéo-France.Pro-
ceedingsof theECMWFSeminaronNumericalmethodsin atmosphericmodels,Vol. II, 193-231.ECMWF, Shin-
field Park, Reading RG2 9AX, UK.
Courtier, P., Derber, J.,Errico, R., Louis, J.-F., & Vukicevic, T., 1993:Importantliteratureon theuseof adjoint,
variational methods and the Kalman filter in meteorology. Tellus, 45A, 342-357.
Courtier, P.,Thepaut,J.-N.,& Hollingsworth,A., 1994:A strategy for operationalimplementationof 4D-Var, using
an incremental approach. Q. J. R. Meteorol. Soc., 120, 1367-1388.
Downton, R. A., & Bell, R. S.,1988:The impactof analysisdifferenceson a medium-rangeforecast.Meteorol.
Mag., 117, 279-285.
Ehrendorfer, M., 1994:TheLiouville equationandits potentialusefulnessfor thepredictionof forecastskill. Part
I: Theory. Mon. Wea. Rev., 122, 703-713.
Ehrendorfer, M., & Tribbia,J.J.,1995:Efficientpredictionof covariancesusingsingularvectors.PreprintVolume,
6th International Meeting on Statistical Climatology, Galway, Ireland, 135-138.
Epstein, E. S., 1969: Stochastic dynamic prediction. Tellus, 21, 739-759.
Evensen, G., 1994:Sequentialdataassimilationwith a non-linearquasi-geostrophicmodelusingMonte Carlo
methods to forecast error statistics. J. Geoph. Res., 99, 10,143-10,162.
Farrell, B. F., 1982: The initial growth of disturbances in a baroclinic flow. J. Atmos. Sci., 39, 8, 1663-1686.
Farrell, B. F., 1988: Optimal excitation of neutral Rossby waves. J. Atmos. Sci., 45 (2), 163-172.
Farrell, B. F., 1989: Optimal excitation of baroclinic waves. J. Atmos. Sci., 46 (9), 1193-1206.
Fleming, R. J.,1971a:On stochasticdynamicprediction.I: theenergeticsof uncertaintyandthequestionof clo-
sure. Mon. Wea. Rev., 99, 851-872.
Fleming, R. J.,1971b:On stochasticdynamicprediction.II: predictabilityandutility. Mon. Wea.Rev., 99, 927-
938.
Gleeson, T. A., 1970: Statistical-dynamical predictions. J. Appl. Meteorol., 9, 333-344.
Golub, G. H., & Van Loan, C. F., 1983: Matrix computation. North Oxford Academic Publ. Co. Ltd., pp. 476.
Hall, M. C. G., & Cacuci,D. G., 1983:Physical interpretationof theadjoint functionsfor sensitivity analysisof
atmospheric models. J. Atmos. Sci., 46, 9, 1193-1206.
Holton, J. R., 1992: An Introduction to Dynamic Meteorology. Academic Press Inc., 511 pp.
Holland, G.J.,McGeer, T., & Youngren,H., 1992:Autonomousaerosondesfor economicalatmosphericsoundings
anywhere on the globe. Bull. Amer. Met. Soc., 73, 1987-1998.
Hoskins, B. J., & Valdes, P. J., 1990: On the exhistence of storm tracks. J. Atmos. Sci., 47, 1854-1864.
Hoskins, B. J.,McIntyre,M. E.,& Robertson,A. W., 1985:Ontheuseandsignificanceof isentropicpotentialvor-
ticity maps. Q. J. R. Meteorol. Soc., 111, 877-946.
Hoskins, B. J.,Buizza,R., & Badger, J.,1999:Thenatureof singularvectorgrowth andstructure.Q. J.R. Mete-
orol. Soc., under revision.

Chaos and weather prediction
26 Meteorological Training Course Lecture Series
ECMWF, 2002
Harrison, M. S. J.,Palmer, T. N., Richardson,D. S.,& Buizza,R., : 1999:Analysisandmodeldependenciesin
medium-range ensembles: two transplant case studies. Q. J. R. Meteorol. Soc., 125, 2487-2515.
Houtekamer, P. L., Lefaivre, L., Derome,J.,Ritchie,H., & Mitchell, H., 1996:A systemsimulationapproachto
ensemble prediction. Mon. Wea. Rev., 124, 1225-1242.
Houtekamer, P. L., & Mitchell, H., 1998:DataassimilationusinganensembleKalmanfilter. Mon.Wea.Rev., 126,
796-811.
Jacob, C.,1994:Theimpactof thenew cloudschemeonECMWF'sIntegratedForecastingSystem(IFS).Proceed-
ingsof theECMWF/GEWEXworkshopon Modeling,validationandassimilationof clouds,ECMWF, Shinfield
Park, Reading RG2 9AX, 31 October - 4 November 1994, pp. 464.
Joly, A., Jorgensen,D., Shapiro,M. A., Thorpe,A. J.,Bessemoulin,P., Browning,K. A., Cammas,J.-P., Chalon,
J.-P., Clough,S.A., Emanuel,K. A., Eymard,R.,Gall,R.,Hildebrand,P. H., Langland,R.H., Lamaître,Y., Lynch,
P., Moore,J. A., Persson,P. O. G., Snyder, C., & Wakimoto,R. M., 1996:TheFrontsandAtlantic Storm-Track
Experiment(FASTEX): Scientificobjectivesandexperimentaldesign. ReportNumber6. TheFASTEX Project
Office, Météo-France, CNRM, 42 Avenue Coriolis, Toulouse, France. (Also submitted to Bull. Am. Met. Soc.).
Kontarev, G.,1980:Theadjointequationtechniqueappliedto meteorologicalproblems.TechnicalReportNo.21,
European Centre for Medium-Range Weather Forecasts, Shinfield Park, Reading RG2 9AX, UK.
Lacarra, J.-F., & Talagrand,O., 1988:Shortrangeevolution of smallperturbationsin a barotropicmodel.Tellus,
40A, 81-95.
Langland, R H, & Rohaly, G D, 1996:Adjoint-basedtargetingof observationsfor FASTEX cyclones.American
MeteorologicalSocietypre-printsof the7thconferenceonmesoscaleprocesses,September9-13,1996,Reading,
UK, pp. 618.
Le Dimet, F.-X., & Talagrand,O.,1986:Variationalalgorithmsfor analysisandassimilationof meteorologicalob-
servations: theoretical aspects. Tellus, 38A, 97-110.
Leith, C. E., 1974: Theoretical skill of Monte Carlo forecasts. Mon. Wea. Rev., 102, 409-418.
Lorenz, E. N., 1963: Deterministic non-periodic flow. J. Atmos. Sci., 20, 130-141.
Lorenz, E. N., 1965: A study of the predictability of a 28-variable atmospheric model. Tellus, 17, 321-333.
Lorenz, E. N., 1993: The essence of chaos. UCL Press, pp 227.
Mahfouf, J.-F., 1999: Influence of physical processes on the tangent-linear approximation. Tellus, 51A, 147-166.
Marsigli, C.,Montani,A., Nerozzi,F., Paccagnella,T., Molteni,F., & Buizza,R.,1999b:High resolutionensemble
prediction. Part II: an application to four flood events. Q. J. R. Meteorol. Soc., submitted
Morcrette, J.-J.,1990:Impactof changesto theradiationtransferparameterisationpluscloudopticalpropertiesin
the ECMWF model. Mon. Wea. Rev., 118, 847-873.
Molteni, F., & Palmer, T. N., 1993:Predictabilityandfinite-timeinstability of thenorthernwinter circulation.Q.
J. R. Meteorol. Soc., 119, 1088-1097.
Molteni, F., Buizza,R., Palmer, T. N., & Petroliagis,T., 1996:The new ECMWF ensemblepredictionsystem:
methodology and validation. Q. J. R. Meteorol. Soc., 122, 73-119.
Molteni, F., Buizza,R.,Marsigli, C.,Montani,A., Nerozzi,F., & Paccagnella,T., 1999:High resolutionensemble
prediction. Part I: representative members definition and global applications. Q. J. R. Meteorol. Soc., submitted.
Montani, A., Thorpe,A. J.,Buizza,R.,& Unden,P., 1999:Forecastskill in theECMWFmodelusingtargetedob-

Chaos and weather prediction
Meteorological Training Course Lecture Series
ECMWF, 2002 27
servations during FASTEX. Q. J. R. Meteorol. Soc., in press.
Noble, B., & Daniel, J. W., 1977: Applied linear algebra, Prenctice-Hall, Inc., pp. 477.
Palmer, T. N., 1997:Onparametrizingscalesthatareonly somewhatsmallerthanthesmallestresolvedscales,with
applicationto convectionandorography. Proceedingsof theECMWF workshopon New insightsandapproaches
to convective parametrization, ECMWF, Shinfield Park, Reading RG2-9AX, UK, 328-337.
Palmer, T. N., Molteni,F., Mureau,R.,Buizza,R.,Chapelet,P., & Tribbia,J.,1993:Ensembleprediction.Proceed-
ingsof theECMWFSeminaronValidationof modelsoverEurope:vol. I, ECMWF, ShinfieldPark,Reading,RG2
9AX, UK.
Pu, Z.-X., Kalnay, E., Sela,J.,& Szunyogh.,1997:Sensitivity of forecasterror to initial conditionswith a quasi-
inverse linear method. Mon. Wea. Rev., 125, 2479-2503.
Pu, Z.-X., Kalnay, E., & Toth,Z., 1998:Applicationof thequasi-inverselinearandadjointNCEPglobalmodels
to targetedobservationsduringFASTEX. Pre-printsof the12thConferenceonNumericalWeatherPrediction,11-
16 January 1998, Phoenix, Arizona, 8-9.
Puri, K., Barkmeijer, J.,& Palmer, T. N., 1999:Ensemblepredictionof tropicalcyclonesusingtargeteddiabatic
singular vectors. Q. J. R. Meteorol. Soc., submitted.
Rabier, F., Klinker, E., Courtier, P., & Hollingsworth, A, 1996:Sensitivity of forecasterrorsto initial conditions.
Q. J. R. Meteorol. Soc., 122, 121-150.
Richardson, L. F., 1922:WeatherPredictionby NumericalProcess.CambridgeUniversityPress(reprt.Dover, New
York).
Richardson, D. S.,1998:Therelativeeffectof modelandanalysisdifferencesonECMWFandUKMO operational
forecasts.Proceedingsof theECMWF Workshopon Predictability, ECMWF, ShinfieldPark,ReadingRG29AX,
UK.
Simmons, A. J.,Burridge,D. M., Jarraud,M., Girard,C., & Wergen,W., 1989:TheECMWF medium-rangepre-
diction modelsdevelopmentof thenumericalformulationsandtheimpactof increasedresolution.Meteorol.At-
mos. Phys., 40, 28-60.
Simmons, A. J.,Mureau,R., & Petroliagis,T., 1995:Error growth andpredictabilityestimatesfor theECMWF
forecasting system. Q. J. R. Meteorol. Soc., 121, 1739-1771.
Snyder, C., 1996:Summaryof an informal workshopon adaptive observationsandFASTEX. Bull. Am. Meteor.
Soc., 77, 953-961.
Somerville, R.C.J.,1979:Predictabilityandpredictionof ultra-longplanetarywaves. Pre-printsof theAmer. Me-
teor. Soc. Fourth Conference on Numerical Weather Prediction, Silver Spring, MD, 182-185.
Strang, G., 1986: Introduction to applied mathematics. Wellesley-Cambridge Press, pp 758.
Thorpe, A. J.,& Shapiro,M. A., 1995:FASTEX: FrontsandAtlantic StormTrackExperiment.TheSciencePlan.
Available form the FASTEX Project Office, July 1995, pp. 25.
Thorpe, A. J.,Buizza,R., Montani,A., & Palmer, T. N., 1998:Chaoticcontrol for weatherprediction.Royal So-
cietyNew frontiersin ScienceExhibition,June1998,TheRoyal Society, 6 CarltonHouseTerrace,LondonSW1Y-
5AG, UK.
Tiedtke, M., 1993: Representation of clouds in large-scale models. Mon. Wea. Rev., 121, 3040-3060.
Toth, Z., & Kalnay, E.,1993:EnsembleforecastingatNMC: thegenerationof perturbations.Bull. Am. Met. Soc.,

Chaos and weather prediction
28 Meteorological Training Course Lecture Series
ECMWF, 2002
74, 2317-2330.
Tracton, M. S.,& Kalnay, E.,1993:Operationalensemblepredictionat theNationalMeteorologicalCenter:prac-
tical aspects. Weather and Forecasting, 8, 379-398.
Urban, B., 1985:Errormaximumgrowth in simplemeteorologicalmodels(in French).MeteorologieNationaleIn-
ternal Report.
Viterbo, P., & Beljaars,C.M., 1995:An improvedlandsurfaceparametrisationschemein theECMWFmodeland
its validation. J. Clim., 8, 2716-2748.
Von Neumann, J.,& Richtmeyer, R. D., 1950:A methodfor thenumericalcalculationof hydrodynamicalshocks.
J. Appl. Phys., 21, 232.