Embed Size (px)
Citation preview
Copyright 2018 Pearson Education, Inc. 681
CHAPTER 9 FIRST-ORDER DIFFERENTIAL EQUATIONS
9.1 SOLUTIONS, SLOPE FIELDS AND EULER’S METHOD
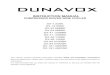
1. y x y slope of 0 for the line .y x For , 0,x y y x y slope 0 in Quadrant I. For , 0,x y y x y slope 0 in Quadrant III. For | | | |, 0, 0,y x y x y x y slope 0 in Quadrant II above .y x For | | | |, 0, 0,y x y x y x y slope 0 in Quadrant II below .y x For | | | |, 0, 0,y x x y y x y slope 0 in Quadrant IV above .y x For | | | |, 0, 0,y x x y y x y slope 0 in Quadrant IV below .y x All of the conditions are seen in slope field (d).
2. 1y y slope is constant for a given value of y, slope is 0 for 1,y slope is positive for 1y and negative for
1.y These characteristics are evident in slope field (c)
3. xyy slope 1 on y x and 1 on .y x x
yy
slope 0 on the -axis,y excluding (0, 0), and is undefined on the -axis.x Slopes are positive for 0, 0x y and 0,x 0y (Quadrants II and IV), otherwise negative, Field (a) is consistent with these conditions.
4. 2 2y y x slope is 0 for y x and for .y x For | | | |y x slope is positive and for | | | |y x slope is negative. Field (b) has these characteristics.

682 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
5.
6.
7. 11 ( ) ( );
x dydxy t y t dt x y x 1
1(1) 1 ( ) 1;y t y t dt , (1) 1dy
dx x y y
8. 1 11
;x dy
t dx xy dt 111
(1) 0;ty dt 1 , (1) 0dydx x y
9. 02 1 ( ) sin 1 ( ) sin ;
x dydxy y t t dt y x x 0
0(0) 2 1 ( ) sin 2;y y t t dt 1 sin ,dy
dx y x
(0) 2y
10. 0
1 ( ) ( );x dy
dxy y t dt y x 00
(0) 1 ( ) 1;y y t dt , (0) 1dydx y y
11. ( )2
4 x y ty x t e dt
( )1 ;dy y xdx xe
2 ( )2
( 2) 2 2;y ty t e dt
1 ,dy ydx xe ( 2) 2y
12. 2 2ln ( ( )) ex
y x t y t dt 2 21 ( ( )) ;dydx x x y x 2 2( ) ln ( ( )) 1;
ee
y e e t y t dt
2 21 ,dydx x x y ( ) 1y e
13. y ( ) dy
dxf y 3 2 2 1.5 1 0 0 1 1 0.75 2 0 3 1
14. y ( ) dy
dxf y 3 0 2 2 1 1 0 0 1 0.75 2 1.3 3 2

Section 9.1 Solutions, Slope Fields and Euler’s Method 683
Copyright 2018 Pearson Education, Inc.
15. 0
0
11 0 21 1 1 (.5) 0.25,y
xy y dx
1
1
0.252 1 2.51 0.25 1 (.5) 0.3,y
xy y dx
2
2
0.33 2 31 0.3 1 (.5) 0.75;y
xy y dx
ln1 1 11 ( ) , ( ) 1 ( ) ln | | ln , 0 ( )dy xdx x x xy P x Q x P x dx dx x x x v x e x
21 121 ;x
x xy x dx C 42 22, 1 1 1 4C x
xx y C y
3.5 4.2542 3.5 7(3.5) 0.6071y
16. 1 0 0 01 0 1(1 0)(.2) .2,y y x y dx
2 1 1 11 .2 1.2(1 .2)(.2) .392,y y x y dx
3 2 2 21 .392 1.4(1 .392)(.2) .5622;y y x y dx 2
1 2ln |1 | ;dy xy x dx y C
21 1 12 2 2 21, 0 ln1 ln |1 | xx y C C y
2(1 )/21 (1.6) .5416xy e y
17. 1 0 0 0 02 2 3 2(0)(3) 2(3) (.2) 4.2,y y x y y dx
2 1 1 1 12 2 4.2 2(.2)(4.2) 2(4.2) (.2) 6.216,y y x y y dx
3 2 2 2 22 2 6.216 2(.4)(6.216) 2(6.216) (.2) 9.6969;y y x y y dx 22 ( 1) 2( 1) ln | | ( 1) ;dy dy
dx yy x x dx y x C 0, 3 ln 3 1 ln 3 1x y C C 2 22 ( 1) ln 3 1 ln 3 2 ( 2)ln ( 1) ln 3 1 3 (.6) 14.2765x x x x xy x y e e e e y
18. 2 21 0 0 01 2 1 1 1 2( 1) (.5) .5,y y y x dx
2 22 1 1 11 2 .5 (.5) 1 2( .5) (.5) .5,y y y x dx
2 23 2 2 21 2 .5 (.5) 1 2(0) (.5) .625;y y y x dx
2211 2 ;dy
yyx dx x x C 2 211, 1 1 1 ( 1) 1 1yx y C C x x
2 21 1
1 1 .5 (.5)(.5) 4
x xy y
19. 201 0 02 2 2(0)(.1) 2,xy y x e dx 2 21 (.1)
2 1 12 2 2(.1) (.1) 2.0202,xy y x e dx e 2 22 (.2)
3 2 22 2.0202 2(.2) (.1) 2.0618,xy y x e dx e 2 2
2 ;x xdy xe dx y e C 2 2(.3)(0) 2 2 1 1 1 (.3) 1 2.0942xy C C y e y e
20. 0 01 0 0 2 2 (.5) 3,xy y y e dx e
1 0.52 1 1 3 3 (.5) 5.47308,xy y y e dx e
2 1.03 2 2 5.47308 5.47308 (.5) 12.9118,xy y y e dx e
684 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
ln ;dy dyx x xdx yye e dx y e C 0, 2 ln 2 1 ln 2 1 ln ln 2 1xx y C C y e
1.51 12 (1.5) 2 65.0292xe ey e y e
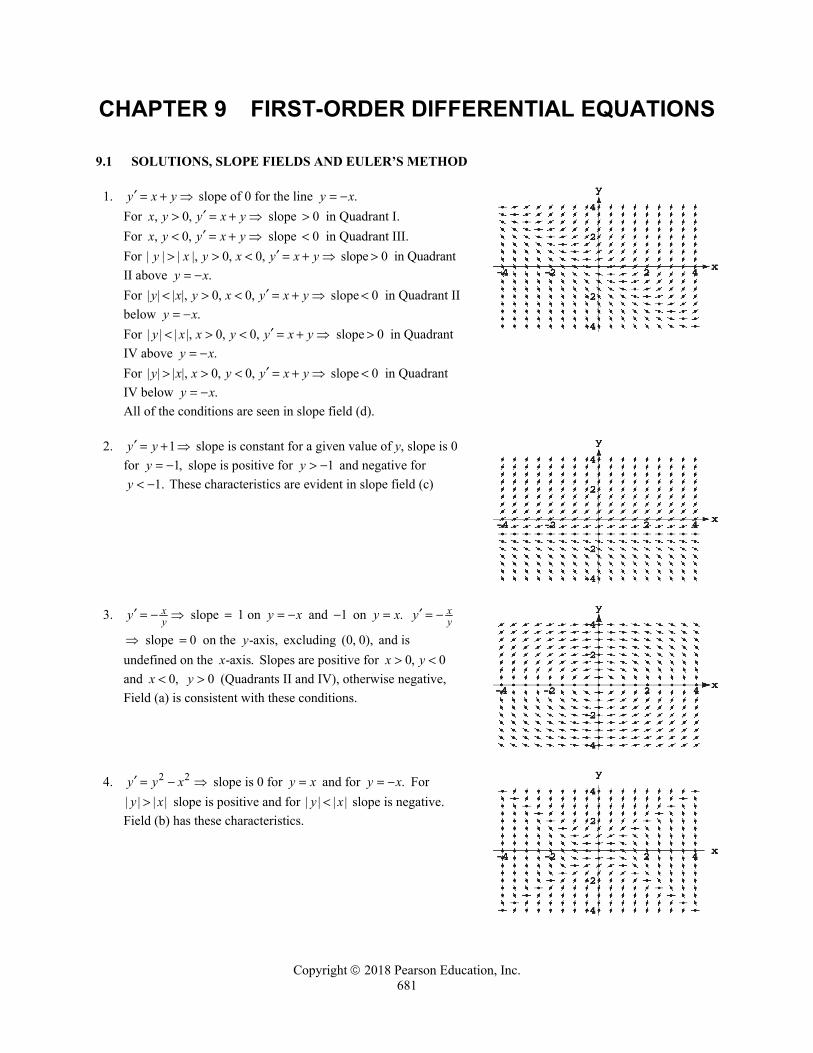
21. 1 1 1(.2) 1.2,y
2 1.2 (1.2)(.2) 1.44,y
3 1.44 (1.44)(.2) 1.728,y
4 1.728 (1.728)(.2) 2.0736,y
5 2.0736 (2.0736)(.2) 2.48832;y
1ln ;dy xy dx y x C y Ce 0(0) 1 1 1 (1) 2.7183xy Ce C y e y e
22. 21 12 (.2) 2.4,y
2.42 1.22.4 (.2) 2.8,y
2.83 1.42.8 (.2) 3.2,y
3.24 1.63.2 (.2) 3.6,y
3.65 1.83.6 (.2) 4;y
ln ln ;dy dxy x y x C y kx (1) 2 2 2 (2) 4y k y x y
23. 2( 1)
1 11 (.5) .5,y
2( .5)2 1.5
.5 (.5) .39794,y
2( .39794)3 2
.39794 (.5) .34195,y
2( .34195)4 2.5
.34195 (.5) .30497,y
5 6 7 8.27812, .25745, .24088, .2272;y y y y
21 2 ;dy dxyxy
x C 1 11 2 1 2 5
(1) 1 1 2 1 (5) .2880x
y C C y y
24. 11 31 (0 sin1) 1,y
1 12 3 31 sin1 1.09350,y
2 13 3 31.09350 sin1.09350 1.29089,y
3 14 3 31.29089 sin1.29089 1.61125,y
4 15 3 31.61125 sin1.61125 2.05533,y
5 16 3 32.05533 sin 2.05533 2.54694;y
2 21 12 221
2sin csc ln csc cot csc cot x C xy x y y dy x dx y y x C y y e Ce

Section 9.1 Solutions, Slope Fields and Euler’s Method 685
Copyright 2018 Pearson Education, Inc.
2 21 12 21 cos
sin 2cot ;x xy yy Ce Ce 21
201 12 2 2(0) 1 cot cot cot xyy Ce C e
2121 1 21 1
2 22cot cot , (2) 2cot cot 2.65591xy e y e
25. 0 0 00 0 0 0 0 0 0 0 0 01 1 ( ) 1 1 1 1 (1)x x x xy x x y e y x x x y e x x y y
0 00 0 0 01 1 1 1dy dy dyx x x xdx dx dxx y e y x x y e x x y
26. 0
0 0( ), ( ) ( ) ,xx
y f x y x y y f t dt C 0
0 00 0 0( ) ( ) ( )
x xx x
y x f t dt C C C y y f t dt y
27–38. Example CAS commands: Maple:
ode : diff ( y(x), x ) y(x);
icA : [0,1];
icB : [0, 2];
icC : [0, -1];
DEplot( ode, y(x), x 0..2, [icA,icB,icC], arrows slim, linecolor blue, title " 27 (Section 9.1)" );#
Mathematica: To plot vector fields, you must begin by loading a graphics package. Graphics PlotField`
To control lengths and appearance of vectors, select the Help browser, type PlotVectorField and select Go. Clear[x, y, f ] yprime y (2 y);
pv PlotVectorField[{1, yprime}, {x, 5, 5}, {y, 4, 6}, Axes True, AxesLabel {x, y}]; To draw solution curves with Mathematica, you must first solve the differential equation. This will be done with the DSolve command. The y[x] and x at the end of the command specify the dependent and independent variables. The command will not work unless the y in the differential equation is referenced as y[x].
equation y'[x] y[x] (2 y[x]) ;
initcond y[a] b;
sols DSolve[{equation, initcond}, y[x], x]
vals {{0, 1/2}, {0, 3/2}, {0, 2}, {0, 3}}
_ _f[{a , b }] sols[[1, 1, 2]];
solnset Map[f, vals]
ps Plot[Evaluate[solnset, {x, 5, 5}];
Show[pv, ps, PlotRange { 4, 6}]; The code for problems such as 35 & 36 is similar for the direction field, but the analytical solutions involve complicated inverse functions, so the numerical solver NDSolve is used. Note that a domain interval is specified.
equation y'[x] Cos[2x y[x]] ;
686 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
initcond y[0] 2;
sol NDSolve[{equation, initcond}, y[x], {x, 0, 5}]
ps Plot[Evaluate[y[x]/.sol, {x, 0, 5}];
N[y[x] /. sol/.x 2]
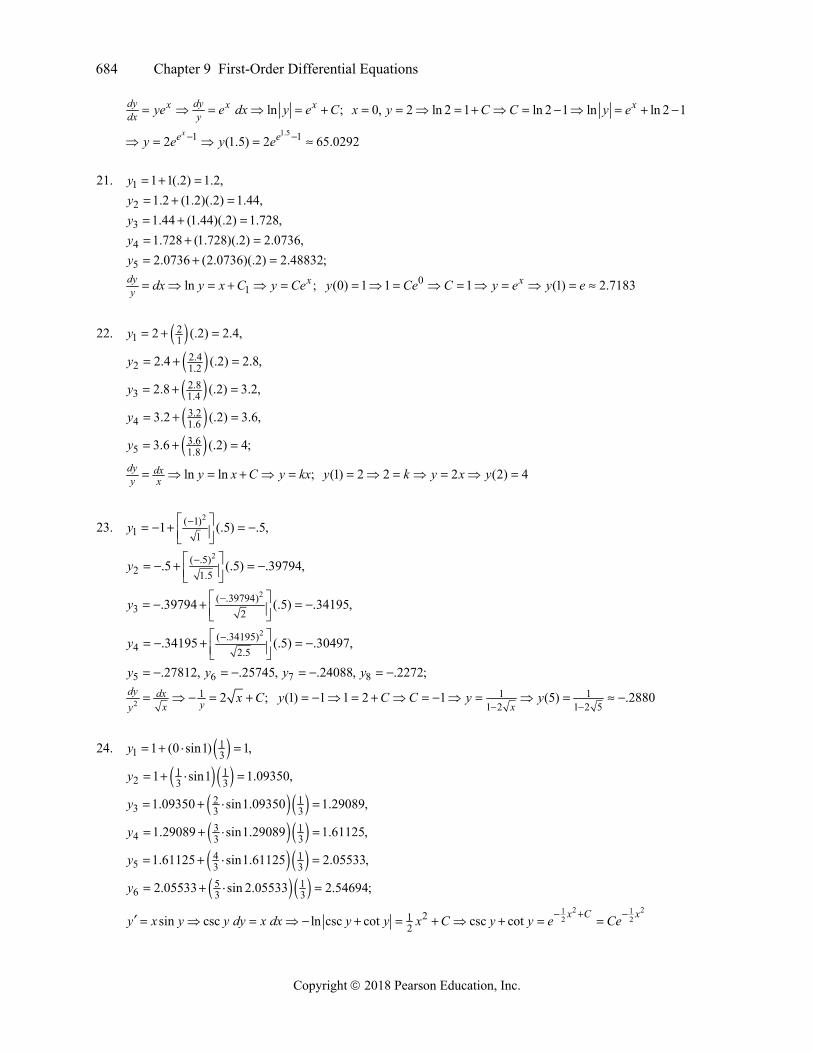
Show[pv, ps, PlotRange {0, 5}]; Solutions for 37 can be found one at a time and plots named and shown together. No direction fields here. For 38, the direction field code is similar, but the solution is found implicitly using integrations. The plot requires loading another special graphics package.
Graphics ImplicitPlot`
Clear[x,y]
2_solution[c ] Integrate[2 (y 1), y] Integrate[3x 4x 2, x] c
values { 6, 4, 2, 0, 2, 4, 6};
solns Map[solution, values];
ps ImplicitPlot[solns, {x, 3, 3}, {y, 3, 3}]
Show[pv, ps]
27.
28.
29.
30.
31.
32.
Section 9.1 Solutions, Slope Fields and Euler’s Method 687
Copyright 2018 Pearson Education, Inc.
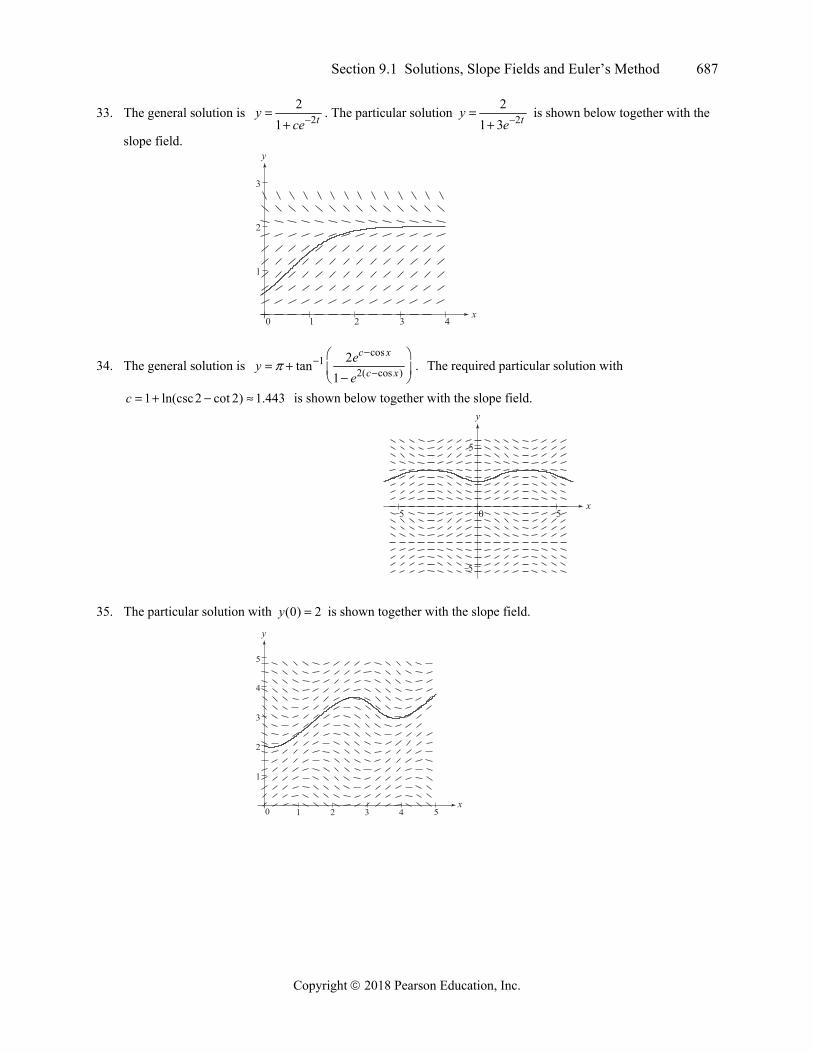
33. The general solution is 22
1 tyce
. The particular solution 22
1 3 tye
is shown below together with the
slope field.
0 1 2 3 4
1
2
3
x
y
34. The general solution is cos
12( cos )
2tan1
c x
c xeye
. The required particular solution with
1 ln(csc 2 cot 2) 1.443c is shown below together with the slope field.
5 0 5
5
5
x
y
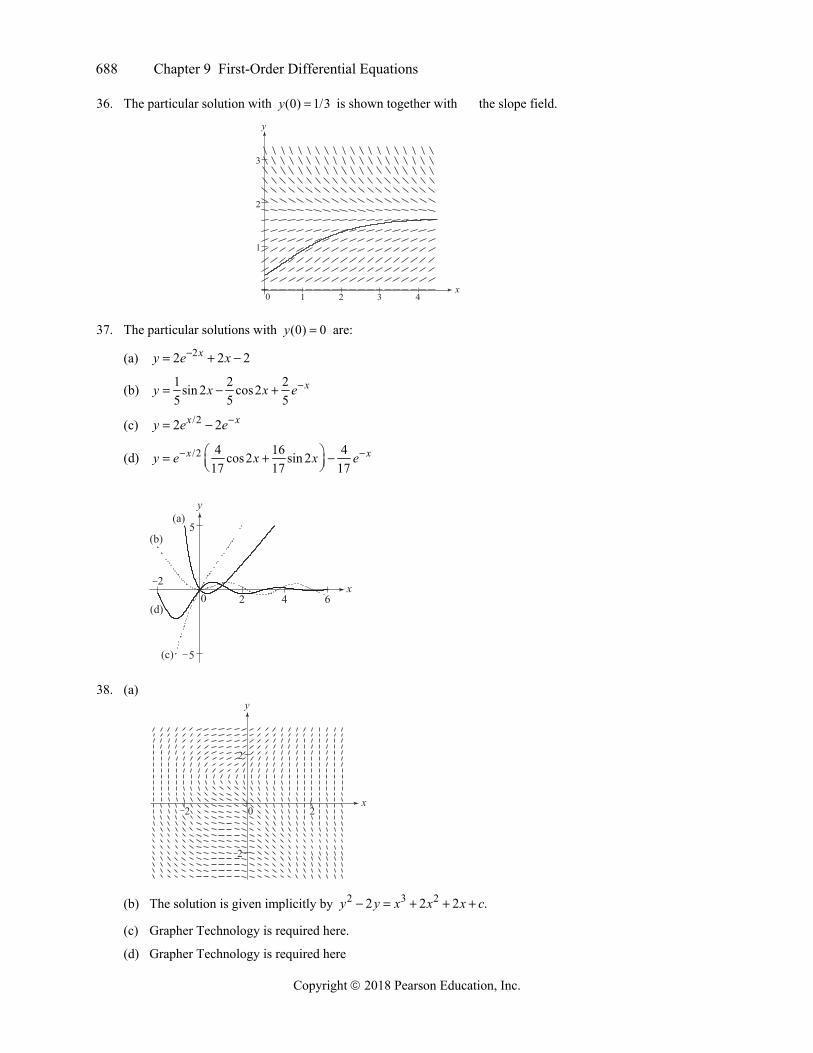
35. The particular solution with (0) 2y is shown together with the slope field.
0 1 2 3 4 5
1
2
3
4
5
x
y
688 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
36. The particular solution with (0) 1/3y is shown together with the slope field.
0 1 2 3 4
1
2
3
x
y
37. The particular solutions with (0) 0y are:
(a) 22 2 2xy e x
(b) 1 2 2sin 2 cos25 5 5
xy x x e
(c) /22 2x xy e e
(d) /2 4 16 4cos2 sin 217 17 17
x xy e x x e
20 2 4 6
5
5
x
y(a)
(b)
(c)
(d)
38. (a)
2 0 2
2
2
x
y
(b) The solution is given implicitly by 2 3 22 2 2 .y y x x x c (c) Grapher Technology is required here.
(d) Grapher Technology is required here

Section 9.1 Solutions, Slope Fields and Euler’s Method 689
Copyright 2018 Pearson Education, Inc.
39. 2 2 22
12 , (0) 2 2 2 (0.1) 0.2n n ndy x x xxn n n n n n ndx xe y y y x e dx y x e y x e
On a TI-84 calculator home screen, type the following commands: 2 STO y: 0 STO x: y (enter) y 0.2*x*e^(x^2)STO y: x 0.1STO x: y (enter, 10 times) The last value displayed gives Eulery (1) 3.45835
The exact solution: 2 2
2 ;x xdy xe dx y e C 20(0) 2 1 1 xy e C C y e
exact (1) 1 3.71828y e
40. 22 ( 1),dydx y x 2 21
12(2) 2 1 0.2 1n n n n n n ny y y y x dx y y x On a TI-84 calculator home screen, type the following commands:
0.5 STO y : 2 STO x: y (enter) 2y 0.2*y (x 1) STO y: x 0.1STO x: y (enter, 10 times)
The last value displayed gives Euley (2) 0.19285r
The exact solution: 22 2 21 12 ( 1) (2 2) 2 2dy dy
dx y yyy x x dx x x C x x C
22 21 1 1 1
2 1/2 2 2(2) (2) 2(2) 2 2 2y x x
y C C C x x y
21
(3) 2(3) 2(3) 0.2y
41. 1, 0, (0) 1 (0.1) 0.1n n n
n n n
x x xdy xn n n ndx y y y yy y y y dx y y
On a TI-84 calculator home screen, type the following commands: 1STO y: 0 STO x: y (enter)
y 0.1*( x /y) STO y: x 0.1STO x: y (enter, 10 times) The last value displayed gives Eulery (1) 1.5000
The exact solution: 2 3/22
2 3 ;yxydy dx y dy x dx x C 2 2(0) 3/21 1 2 1
2 2 2 3 2(0)y C C 2 3/2 3/2 3/22 1 4 4
exact2 3 2 3 31 (1) (1) 1 1.5275y x y x y
42. 21 ,dydx y 2 2 2
1(0) 0 1 1 (0.1) 0.1 1n n n n n n ny y y y dx y y y y
On a TI-84 calculator home screen, type the following commands: 0 STO y: 0 STO x: y (enter)
2y 0.1*(1 y ) STO y: x 0.1STO x: y (enter, 10 times) The last value displayed gives Eulery (1) 1.3964
The exact solution: 22 1
11 tan ;dy
ydy y dx dx y x C
1 1tan (0) tan 0 0 0y C
1exact0 tan tan (1) tan1 1.5574C y x y x y
43. Example CAS commands: Maple:
ode : diff ( y(x), x ) x y(x);ic : y(0) -7/10;
x0 : -4;x1: 4;y0 : -4; y1: 4;

690 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
b : 1;
P1: DEplot( ode, y(x), x x0..x1, y y0..y1, arrows thin, title "#43(a) (Section 9.1)" ):
P1;
_Ygen : unapply( rhs(dsolve( ode, y(x) )), x, C1 ); # (b)
P2 : seq( plot( Ygen(x,c), x x0..x1, y y0..y1, color blue ), c -2..2 ): # (c)
display( [P1,P2], title "#43(c) (Section 9.1)" );
CC : solve( Ygen(0,C) rhs(ic), C); # (d)
Ypart : Ygen(x,CC);
P3: plot( Ypart, x 0..b, title "#43(d) (Section 9.1)" ):
P3;
euler4 : dsolve( {ode,ic}, numeric, method classical[foreuler], stepsize (x1-x0)/4 ): # (e)
P4 : odeplot( euler4, [x,y(x)], x 0..b, numpoints 4, color blue ):
display( [P3,P4], title " 43(e) (Section 9. ;# 1)" )
euler8 : dsolve( {ode,ic}, numeric, method classical[foreuler], stepsize (x1-x0)/8 ): # (f )
odeplot( euler8, [x,y(x)], x 0..b, numpoints 8, color green ): :P5
eulerl6 : dsolve( {ode,ic},numeric, method classical[foreuler], stepsize (x1-x0)/16 ):
P6 : odeplot( euler16, [x,y(x)], x 0..b, numpoints 16, color pink ):
euler32 : dsolve( {ode,ic},numeric, method classical[foreuler], stepsize (x1-x0)/32 ):
P7 : odeplot( euler32, [x,y(x)], x 0..b, numpoints 32, color cyan ):
display( [P3,P4,P5,P6,P7], title "#43(f ) (Section 9.1)" );
N | h |`percent error` , # (g)
4 | (x1-x0)/ 4 | evalf[5]( abs(1-eval(y(x),euler4(b))/eval(Ypart, x b))*100 ) ,
8 | (x1-x0)/ 8 | evalf[5]( abs(1-eval(y(x),euler8(b))/eval(Ypart, x b))*100 ) ,
16 | (x1-x0)/16 | evalf[5]( abs(1-eval(y(x),euler16(b))/eval(Ypart, x b))*100 ) ,
32 | (x1-x0)/ 32 | evalf[5]( abs(1-eval(y(x),euler32(b))/eval(Ypart, x b))*100 ) ;
43–46. Example CAS commands: Mathematica: (assigned functions, step sizes, and values for initial conditions may vary) Problems 43–46 involve use of code from Problems 27–38 together with the above code for Euler’s method.
9.2 FIRST-ORDER LINEAR EQUATIONS
1. 1 ,xdy dyx e
dx dx x xx y e y 1( ) , ( )xe
x xP x Q x
( ) ln1( ) ln | | ln , 0 ( ) P x dx xxP x dx dx x x x v x e e x
1 1 1( ) ( ) ( ) , 0
x xxe e Cv x x x x xy v x Q x dx x dx e C x

Section 9.2 First-Order Linear Equations 691
Copyright 2018 Pearson Education, Inc.
2. 2 1 2 ,dy dyx x xdx dxe e y y e ( ) 2, ( ) xP x Q x e
( ) 2( ) 2 2 ( ) P x dx xP x dx dx x v x e e
2 2 22 21 1 1
x x xx x x x x x
e e ey e e dx e dx e C e Ce
3. 2 3sin 3 sin3 , 0 ,dyx x
dx xx xxy y x y 3
3 sin( ) , ( ) xx x
P x Q x 33 ln 33 3ln ln , 0 ( ) x
x dx x x x v x e x
3 3 3 3 33 sin cos1 1 1sin cos , 0x C x
x x x x xy x dx x dx x C x
4. 2 22 2tan cos , tan cos ,dy
dxy x y x x x y x 2( ) tan , ( ) cosP x x Q x x 11 ln(cos ) 1sin
cos 2 2tan ln | cos | ln (cos ) , ( ) (cos ) secxxxx dx dx x x x v x e x x
21sec sec cos (cos ) cos (cos ) sin sin cos cosxy x x dx x x dx x x C x x C x
5. 21 2 1 12 1 , 0 ,dy dy
dx x dx x x xx y x y 2
2 1 1( ) , ( )x x xP x Q x
22 ln 22 2ln ln , 0 ( ) xx dx x x x v x e x
2
2 2 2 2 221 1 1 1 1 1 1
2 2( 1) , 0x Cx xx x x x x
y x dx x dx x C x
6. 11 1(1 ) ,dy x
dx x xx y y x y 1
1 1( ) , ( ) xx xP x Q x
11 ln(1 ),x dx x since ln(1 )0 ( ) 1xx v x e
3/23/2 21 1 1 21 1 1 1 3 3(1 ) 1(1 ) x x C
x x x x x xy x dx x dx x C
7. /21 1 12 2 2( ) ,dy x
dx y e P x /2 /21 12 2( ) ( ) ( )x xQ x e P x dx x v x e
/2/2 /2 /2 /2 /2 /21 1 1 1 1
2 2 2 2xx x x x x x
ey e e dx e dx e x C xe Ce
8. 22 2 ( ) 2,dy xdx y xe P x 2 2( ) 2 ( ) 2 2 ( )x xQ x xe P x dx dx x v x e
2 22 2 2 2 2 2 21 12 2x x
x x x x xe e
y e xe dx x dx e x C x e Ce
9. 1 12ln ( ) ,dydx x xy x P x 1( ) 2 ln ( ) ln , 0xQ x x P x dx dx x x
2 2ln 1 1( ) 2 ln ln lnxx xv x e y x x dx x x C x x Cx
10. 2cos2 2, 0 ( ) ,dy x
dx x xxy x P x 2
2cos 2( ) ( ) 2ln ln , 0xxx
Q x P x dx dx x x x
2
2 2 2 2 2ln 2 2 cos sin1 1 1( ) cos sinx x x C
x x x x xv x e x y x dx x dx x C

692 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
11. 314 4
1 1( 1)( ) ,ds t
dt t tts P t
3
41 41( 1)
( ) ( ) 4 ln 1 ln ( 1)ttt
Q t P t dt dt t t
4 3
4 3 4 4ln( 1) 4 4 211 1 1
3( 1) ( 1) ( 1) ( 1)( ) ( 1) ( 1) 1t t t
t t t tv t e t s t dt t dt t C
3
4 4 43( 1) ( 1) ( 1)t t C
t t t
12. 2 31 2 1 2
1 1( 1) ( 1)( 1) 2 3( 1) 3 ( ) ,ds ds
dt dt t tt tt s t s P t 3( ) 3 ( 1)Q t t
22 ln ( 1) 221( ) 2 ln 1 ln ( 1) ( ) ( 1)t
tP t dt dt t t v t e t
2 22 3 2 11 1
( 1) ( 1)( 1) 3 ( 1) 3( 1) ( 1)
t ts t t dt t t dt
2 23 21
( 1) ( 1)( 1) ln 1 ( 1) ( 1) ln ( 1) , 1C
t tt t C t t t t
13. (cot ) sec ( ) cot ,drd r P ln |sin |( ) sec ( ) cot ln |sin | ( )Q P d d v e
sin because 1 1 12 sin sin sin0 (sin )(sec ) tan ln |sec |r d d C
(csc ) ln |sec | C
14. 22 sin
tan tantan sin (cot ) sin cos ( ) cot ,dr dr drrd d dr r P ( ) sin cosQ
( ) cot ln sin ln(sin )P d d since ln(sin )20 ( ) sinv e
3 22 sin sin1 1 1sin sin sin 3 3 sin(sin )(sin cos ) sin cos Cr d d C
15. 2 3 ( ) 2,dydt y P t 2 2
2 2 231 12( ) 3 ( ) 2 2 ( ) 3 ;t t
t t te e
Q t P t dt dt t v t e y e dt e C
23 31 12 2 2 2(0) 1 1 ty C C y e
16. 2 2 2( ) ,dy ydt t tt P t 2
22 ln 2 2 21( ) ( ) 2 ln | | ( ) t
tQ t t P t dt t v t e t y t t dt
5 3
2 2 241 1
5 5 ;t t Ct t t
t dt C 3
28 12 125 4 5 5 5
(2) 1 1C tt
y C y
17. sin1 1( ) ,dyd y P ln| |sin sin1
| |( ) ( ) ln ( )Q P d v e y d
sin1 d for 1 1 10 sin cos cos ;Cy d C 2 21y C
12cosy
18. 22 2sec tan ( ) ,dyd y P 2 2ln| |( ) sec tan ( ) 2 ln | | ( )Q P d v e
22 2 2 2 2 2 21 sec tan sec tan sec sec ;y d d C C
2 2
2 22 218 18
3 9 92 2 (2) 2 sec 2y C C y

Section 9.2 First-Order Linear Equations 693
Copyright 2018 Pearson Education, Inc.
19. 2 2 2
2 2( 1)2
1 1 ( 1) ( 1)( 1) 2 2 2 ( ) 2 ,
x x xdy dy x x dye e edx x dx x dxx x
x x x y y xy P x x
2
2( 1)( )
xex
Q x
2 12 2 2 2
2 2 2( 1)2 1 1
1( 1) ( 1)( ) 2 ( )
x
x
xx x x xex xe
P x dx x dx x v x e y e dx e dx e C
2 2
1 ;x xe
x Ce 221
0 1 1(0) 5 5 1 5 6 6xx e
xy C C C y e
20. ( ) ,dydx xy x P x x
2 22
2 /2
/2 /212( ) ( ) ( )
x
x xxe
Q x x P x dx x dx v x e y e x dx
2
2 2/2 /2
/21 1 ;x x
x Ce e
e C 2 /27(0) 6 1 6 7 1
xey C C y
21. 0 ( ) ,dydt ky P t k 1( ) 0 ( ) ( ) (0)kt
kt kte
Q t P t dt k dt kt v t e y e dt
(0 ) ;kt kte C Ce 0 0 0(0) kty y C y y y e
22. (a) 0 ( ) ,du k kdt m mu P t /( ) 0 ( ) ( ) kt mk k kt
m m mQ t P t dt dt t u t e
/ //1 0 ;kt m kt m
kt m Ce e
y e dt (0)/( / )
0 0 0 0(0) k mk m tC
eu u u C u u u e
(b) ( / ) ( / )ln .k m t C k m t Cdu k du k kdt m u m mu dt u t C u e u e e Let 1.Ce C
Then ( / )1
1k m teu C and ( / )(0)
10 1 1(0) .k me
u u C C So ( / )0
k m tu u e
23. 1 ln ln | |xx dx x x C x x Cx (b) is correct
24. 1 1cos cos coscos sin tan C
x x xx dx x C x (b) is correct
25. Steady State VR and we want / / /1 1 1 1
2 2 2 21 1Rt L Rt L Rt LV V VR R Ri e e e
1 12 2ln ln ln 2Rt L L
L R Rt t sec
26. (a) 1 / /110 ln ;C Rt L Rt Ldi RtR R
dt L i L Li di dt i C i e e Ce (0)i I I C /Rt Li Ie amp
(b) / /1 1 12 2 2ln ln 2 ln 2Rt L Rt L Rt L
L RI I e e t .sec
(c) ( / )( / )Rt L L R tLRt i I e I e amp
27. (a) ( / )(3 / ) 33 1 1 0.9502R L L RL V V VR R R Rt i e e amp, or about 95% of the steady state value
(b) ( / )(2 / ) 22 1 1 0.8647R L L RV V VLR R R Rt i e e amp or about 86% of the steady state value
28. (a) ( ) ,di VR Rdt L L Li P t /
/ /1( ) ( ) ( ) Rt LRt L Rt LV Rt VR
L L L LeQ t P t dt dt v t e i e dt
// ( / )1
Rt LRt L R L tV VL
R L Ree C Ce

694 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
(b) /(0) 0 0 Rt LV V V VR R R Ri C C i e
(c) 0 0V di di V V VR RR dt dt L L R L Ri i i is a solution of Eq. (6); ( / )R L ti Ce
29. 2;y y y we have 2,n so let 1 2 1.u y y Then 1y u and 2 21 dy dydu dudx dx dx dxy y
2 1 2 1.du dudx dxu u u u With dx xe e as the integrating factor, we have
.x x xdu ddx dxe u e u e Integrating, we get 1 1
11
x
x C xxe
x x C eye e C
e u e C u y
30. 2;y y xy we have 2,n so let 1.u y Then 1y u and 2 2 2 .dy dydu du dudx dx dx dx dxy y u
Substituting: 2 1 2 .du dudx dxu u xu u x Using dx xe e as an integrating factor:
(1 ) 1(1 )x x
x x xe x Cx x x x xdu d e
dx dx e e xe Ce u e u x e e u e x C u y u
31. 2 21 1 .x xxy y y y y y Let 1 ( 2) 3 1/3u y y y u and 2 2/3.y u
2 2 2/31 13 33 .dy dydu du du
dx dx dx dx dxy y y u Thus we have
2/3 1/3 2/3 3 31 1 13 .du du
dx x x dx x xu u u u The integrating factor is 3 3ln( ) x dx xv x e e
3ln 3.xe x Thus 3 3
1/33 3 2 3 3 33 3 1 1d C Cdx x x x
x u x x x u x C u y y
32. 22 3 32 12 .x x
x y xy y y y y 22 1( ) , ( ) , 3.x x
P x Q x n Let 1 3 2.u y y Substituting
gives 2 22 1 4 2( 2) 2 .du du
dx x dx xx xu u Let the integrating factor, ( ),v x be
4 4ln 4.x dx xe e x Thus 4 6 4 5 4 22 2
5 52ddx xx u x x u x C u Cx y
1/2425xy Cx
9.3 APPLICATIONS
1. Note that the total mass is 66 7 73 kg, therefore, ( / ) 3.9 /730 9k m t tv v e v e
(a) 3.9 /73 3.9 /73219013( ) 9 t ts t e dt e C
Since (0) 0s we have 219013C and 3.9 /732190 2190
13 13lim ( ) lim 1 168.5tt t
s t e
The cyclist will coast about 168.5 meters. (b) 3.9/73 3.9 73ln 9
73 3.91 9 ln 9 41.13te t sec It will take about 41.13 seconds.

Section 9.3 Applications 695
Copyright 2018 Pearson Education, Inc.
2. ( / ) (59,000/51,000,000) 59 /51,0000 9 9k m t t tv v e v e v e
(a) 459,00059 /51,000 59 /51,00059( ) 9 t ts t e dt e C
Since (0) 0s we have 459,00059C and 459,000 459,00059 /51,000
59 59lim ( ) lim 1 7780tt t
s t e
m
The ship sill coast about 7780 m, or 7.78 km. (b) 51,000ln 959 /51,000 59
51,000 591 9 ln 9 1899.3t te t sec
It will take about 31.65 minutes.
3. The total distance traveled 0 (2.75)(39.92) 4.91 22.36.v mk k k Therefore, the distance traveled is given
by the function (22.36/39.92)( ) 4.91 1 .ts t e The graph shows ( )s t and the data points.
4. 0v mk coasting distance (0.80)(49.90) 998
331.32k k
We know that 0 1.32v mk and 998 20
33(49.9) 33 .km
Using Equation 2, we have: 0 ( / ) 20 /33 0.606( ) 1 1.32 1 1.32 1v m k m t t tks t e e e
5. 2 0 .y xy y yx xx
y mx m y So for
orthogonals: 2 2
2 2dy yx xdx y y dy x dx C
2 21x y C
6. 2
2 422 20 2y x y xy
x xy cx c x y xy
2 .yxy So for the orthogonals: 2
dy xdx y
2 222 22 ,x xydy xdx y C y C
0C

696 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
7. 2
212 2 2 21 1 y
xkx y y kx k
2 2
4
(2 ) 1 2 2 20 2 1 (2 )x y y y x
xyx y y x
2 2
2
1 (2 ) 1
2.
y x y
xyxyy
So for the orthogonals:
2 2 2
2
12 21
lnydy xy y x
dx yydy x dx y C
8. 2 2 2 4 222 4 2 0 .x x
y yx y c x yy y For
orthogonals: 12 2 2ln lndy y dy dx
dx x y x y x C
1/2 1/21 1ln ln ln | |y x C y C x
9.
2( 1)
0x x
x x
e y y eyxe e
y ce c
.x xe y ye y y So for the orthogonals: 2 21
12 2dy ydx y y dy dx x C y x C
12y x C
10. 1
2
lnlnln 0yx y yykxx x
y e y kx k
lnln 0 .y yxy xy y y So for the
orthogonals: ln lndy xdx y y y y dy x dx
2 2 21 1 12 4 2lny y y x C
22 212ln yy y x C
11. 2 22 3 5x y and 2 3y x intersect at (1, 1). Also, 2 2 462 3 5 4 6 0 x
yx y x y y y
23(1,1)y and
2
1
2 3 2 3 31 1 1 1 12 22 3 (1, 1) .x
yy x y y x y y Since 321 3 2 1,y y the
curves are orthogonal.

Section 9.3 Applications 697
Copyright 2018 Pearson Education, Inc.
12. (a) 22
2 20 yxx dx y dy C the general
equation of the family with slope .xyy
For the orthogonals: y dy dxx y xy
ln lny x C or 1y C x (where 1CC e )
is the general equation of the orthogonals.
(b) 22 0 2 dy dx
y xx dy y dx y dx x dy
21 112 2 ln lndy dx
y x y x C y C x
is the equation for the solution family. 21 1 1
2 2ln ln 0y yy x xy x C y
slope of orthogonals is 2dy xdx y
2222 xy dy x dx y C is the
general equation of the orthogonals.
13. Let ( )y t the amount of salt in the container and ( )V t the total volume of liquid in the tank at time t. Then,
the departure rate is ( )( )
y tV t (the outflow rate).
(a) Rate entering gallb lbgal min min2 5 10
(b) Volume ( ) 100 gal (5 gal 4 gal) (100 )galV t t t t (c) The volume at time t is (100 )t gal. The amount of salt in the tank at time t is y lbs. So the concentration
at any time t is lb100 gal .y
t Then, the rate leaving gal 4lb lb100 gal min 100 min4y y
t t
(d) 4 4 4100 100 10010 10 ( ) ,dy y dy
dt t dt t ty P t 4100( ) 10 ( ) 4ln (100 )tQ t P t dt dt t
5
4 4(100 )4ln (100 ) 4 4 101
5(100 ) (100 )( ) (100 ) (100 ) (10 ) tt
t tv t e t y t dt C
4(100 )2(100 ) ;C
tt
4
4(100 0)
(0) 50 2(100 0) 50 (150)(100)Cy C
4
4 4100
(150)(100) 150(100 ) 1
2(100 ) 2(100 )tt
y t y t
(e) 4
4(150)(100) (25) 188.6 lb
volume 125 gal(100 25)(25) 2(100 25) 188.56 lbs concentration 1.5yy
14. (a) (5 3) 2 100 2dVdt V t
The tank is full when 200 100 2 50minV t t

698 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
(b) Let ( )y t be the amount of concentrate in the tank at time t.
gal gallb lb 5 3 3 512 gal min 100 2 gal min 2 2 50 2( 50) 25 3dy y dy y dy
dt t dt t dt t y 52( ) ;Q t
3 3 31 12 50 2 50 2( ) ( ) ln ( 50)t tP t P t dt dt t since 50 0t
32 ln ( 50)( )( ) tP t dtv t e e
3/2 3/23/2 3/2 3/2 5/251
2( 50) ( 50)( 50) ( ) ( 50) ( 50) ( 50) ( ) 50 C
t tt y t t dt t t C y t t
Apply the initial condition (i.e., distilled water in the tank at 0t ): 5/2
3/2 3/25/2 50
50 ( 50)(0) 0 50 50 ( ) 50 .C
ty C y t t
When the tank is full at = 50,t
5/2
3/250
100(50) 100 83.22y pounds of concentrate.
15. Let y be the amount of fertilizer in the tank at time t. Then rate entering gallb lbgal min min1 1 1 and the volume
in the tank at time t is gal galmin min( ) 100 (gal) 1 3 min (100 2 ) gal.V t t t
Hence rate out
3 3lb lb 3 3100 2 100 2 min 100 2 min 100 2 100 23 1 1 ( ) ,y y dy y dy
t t dt t dt t ty P t ( ) 1Q t
3ln(100 2 ) 3ln(100 2 ) /2 3/23100 2 2( ) ( ) (100 2 )t t
tP t dt dt v t e t
1/2
3/22(100 2 )3/2 3/2 3/21
2(100 2 )(100 2 ) (100 2 ) (100 2 ) (100 2 ) ;t
ty t dt t C t C t
3/2 3/2 1/2 110(0) 0 100 2(0) 100 2(0) (100) 100 (100)y C C C
3/2(100 2 )10(100 2 ) .ty t Let 1/23
2 (100 2 ) ( 2) 3 100 210 100 2 2 0
tdy dy tdt dt
20 3 100 2 400 9(100 2 ) 400 900 18 500 18 27.8min,t t t t t the time to
reach the maximum. The maximum amount is then 3/2100 2(27.8)10(27.8) 100 2(27.8) 14.8 lby
16. Let ( )y y t be the amount of carbon monoxide (CO) in the room at time t. The amount of CO entering the
room is 33 ft4 12100 10 1000 min, and the amount of CO leaving the room is 33 ft
4500 10 15,000 min .y y
Thus, 12 1 12 11000 15,000 15,000 1000 15,000( ) ,dy y dy
dt dt y P t /15,000121000( ) ( ) tQ t v t e
/15,0001215,000/15,000 /15,000 /15,000 /15,000 /15,0001 12
1000 1000 180 ;tt t t t t
ey e dt y e e C e e C
/15,000(0) 0 0 1(180 ) 180 180 180 .ty C C y e When the concentration of CO is 0.01%
in the room, the amount of CO satisfies 3.014500 100 0.45 ft .y y When the room contains this amount
we have /15,000 /15,000179.55 179.55180 1800.45 180 180 15,000ln 37.55min .t te e t
Section 9.4 Graphical Solutions of Autonomous Equations 699
Copyright 2018 Pearson Education, Inc.
9.4 GRAPHICAL SOLUTIONS OF AUTONOMOUS EQUATIONS
1. ( 2)( 3)y y y (a) 2y is a stable equilibrium value and 3y is an unstable equilibrium.
(b) 12(2 1) 2( 2) ( 3)y y y y y y
(c)
2. ( 2)( 2)y y y (a) 2y is a stable equilibrium value and 2y is an unstable equilibrium. (b) 2 2( 2) ( 2)y yy y y y
(c)
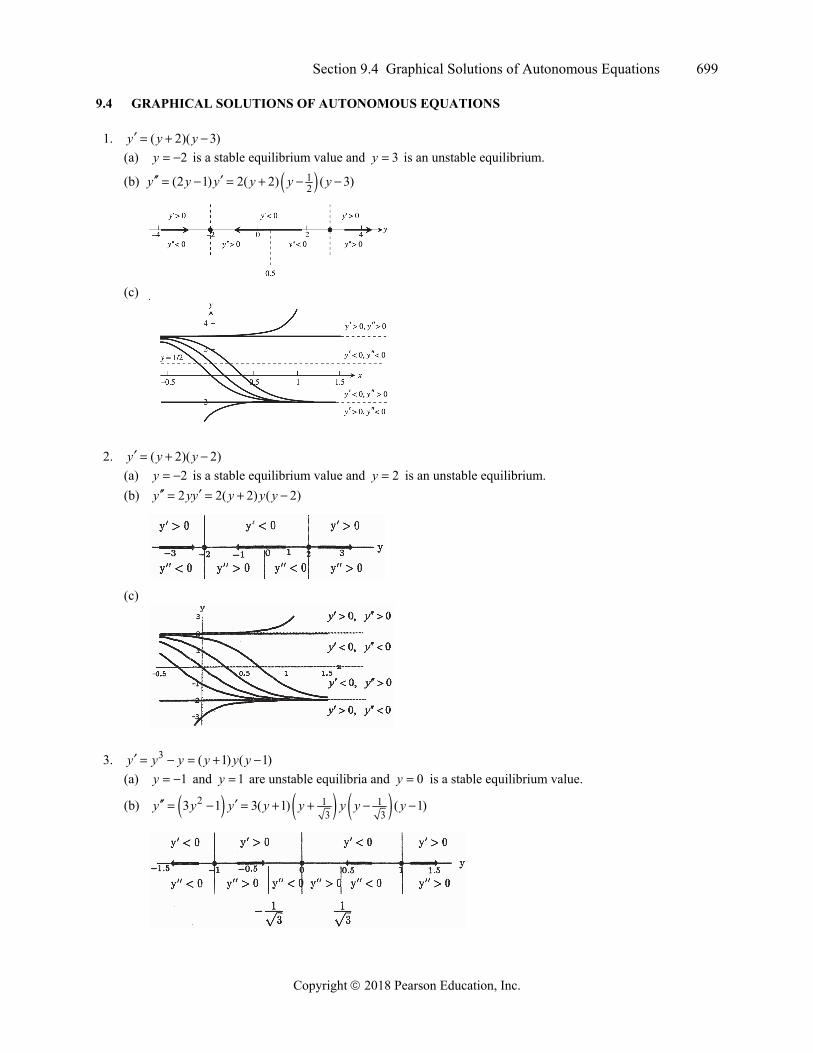
3. 3 ( 1) ( 1)y y y y y y (a) 1y and 1y are unstable equilibria and 0y is a stable equilibrium value.
(b) 2 1 13 3
3 1 3( 1) ( 1)y y y y y y y y
700 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
(c)
4. ( 2)y y y (a) 0y is a stable equilibrium value and 2y is an unstable equilibrium. (b) (2 2) 2 ( 1)( 2)y y y y y y
(c)
5. , 0y y y (a) There are no equilibrium values. (b) 1 1 1
22 2y yy y y
(c)
6. , 0y y y y (a) 1y is an unstable equilibrium.
(b) 1 1 122 2
1 1 1y y
y y y y y y
Section 9.4 Graphical Solutions of Autonomous Equations 701
Copyright 2018 Pearson Education, Inc.
(c)
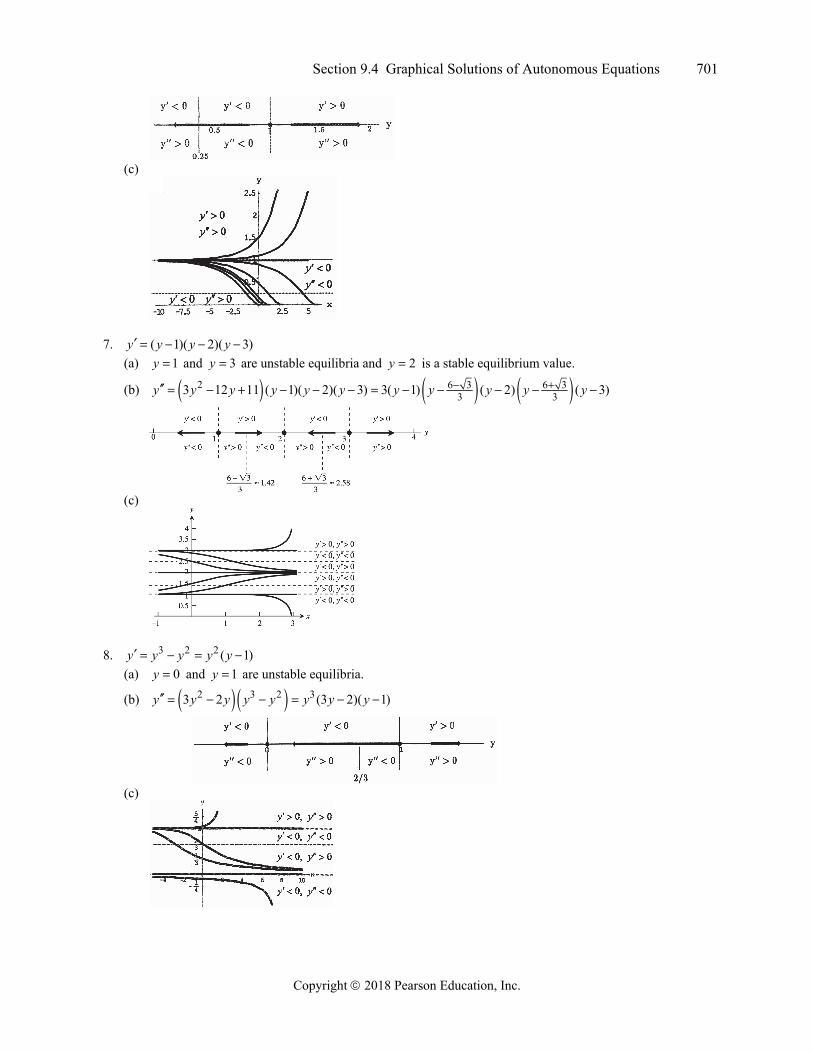
7. ( 1)( 2)( 3)y y y y (a) 1y and 3y are unstable equilibria and 2y is a stable equilibrium value.
(b) 2 6 3 6 33 33 12 11 ( 1)( 2)( 3) 3( 1) ( 2) ( 3)y y y y y y y y y y y
(c)
8. 3 2 2 ( 1)y y y y y (a) 0y and 1y are unstable equilibria.
(b) 2 3 2 33 2 (3 2)( 1)y y y y y y y y
(c)
702 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
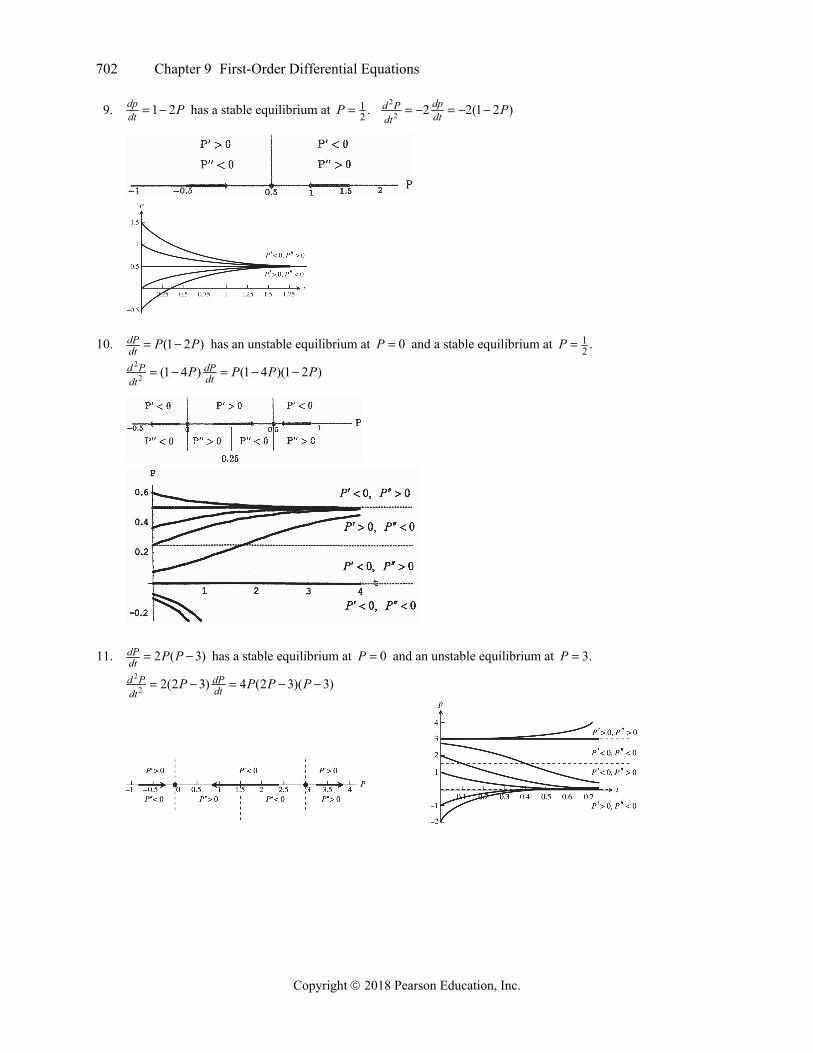
9. 1 2dpdt P has a stable equilibrium at 1
2 .P 2
2 2 2(1 2 )dpd Pdtdt
P
10. (1 2 )dPdt P P has an unstable equilibrium at 0P and a stable equilibrium at 1
2 .P 2
2 (1 4 ) (1 4 )(1 2 )d P dPdtdt
P P P P
11. 2 ( 3)dPdt P P has a stable equilibrium at 0P and an unstable equilibrium at 3.P
2
2 2(2 3) 4 (2 3)( 3)d P dPdtdt
P P P P
Section 9.4 Graphical Solutions of Autonomous Equations 703
Copyright 2018 Pearson Education, Inc.
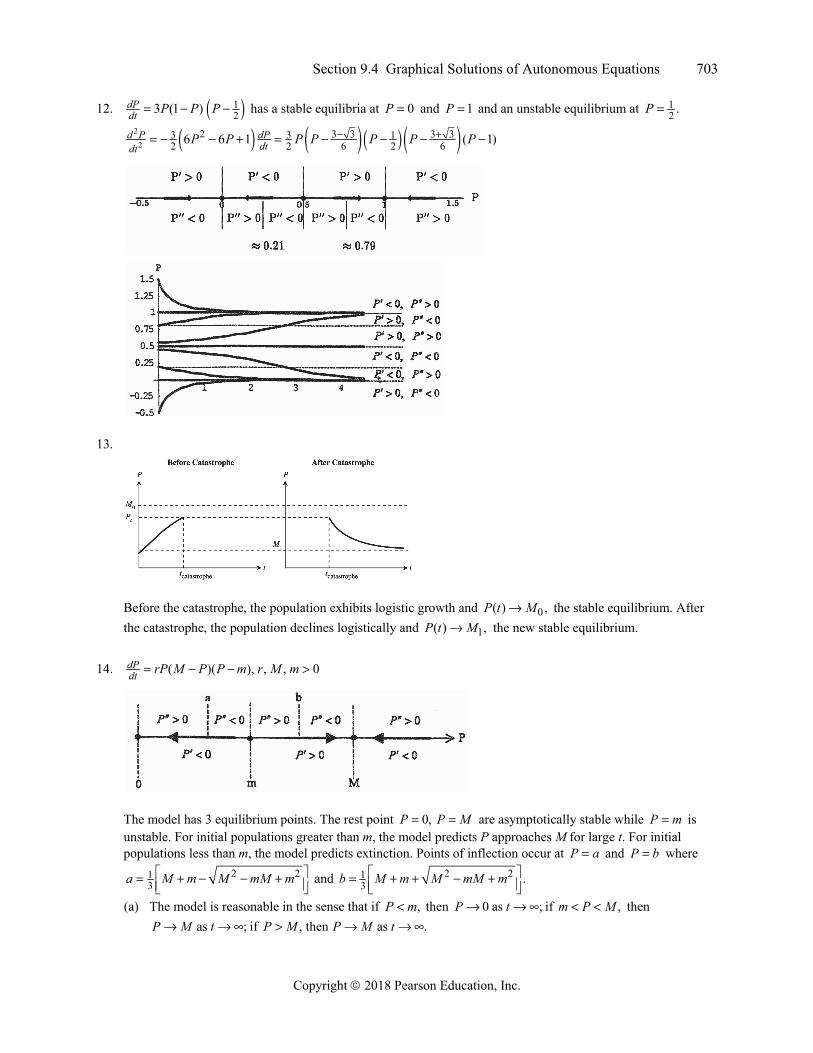
12. 123 (1 )dP
dt P P P has a stable equilibria at 0P and 1P and an unstable equilibrium at 12 .P
2
22 3 3 3 33 3 1
2 2 6 2 66 6 1 ( 1)d P dPdtdt
P P P P P P P
13.
Before the catastrophe, the population exhibits logistic growth and 0( ) ,P t M the stable equilibrium. After the catastrophe, the population declines logistically and 1( ) ,P t M the new stable equilibrium.
14. ( )( ), , , 0dPdt rP M P P m r M m
The model has 3 equilibrium points. The rest point 0, P P M are asymptotically stable while P m is unstable. For initial populations greater than m, the model predicts P approaches M for large t. For initial populations less than m, the model predicts extinction. Points of inflection occur at P a and P b where
2 213a M m M mM m
and 2 213 .b M m M mM m
(a) The model is reasonable in the sense that if ,P m then 0 as ; if ,P t m P M then as ; if , then as .P M t P M P M t

704 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
(b) It is different if the population falls below m, for then 0P as t (extinction). It is probably a more realistic model for that reason because we know some populations have become extinct after the population level became too low.
(c) For P M we see that ( ) ( )dPdt rP M P P m is negative. Thus the curve is everywhere decreasing.
Moreover, P M is a solution to the differential equation. Since the equation satisfies the existence and uniqueness conditions, solution trajectories cannot cross. Thus, as .P M t
(d) See the initial discussion above. (e) See the initial discussion above.
15. 2 , , , 0 and ( ) 0dv kdt mg v g k m v t
Equilibrium: 2 0 mgdv kdt m kg v v
Concavity: 2
222 2d y k dv k k
m dt m mdtv v g v
(a)
(b)
(c) 160 ft
terminal 0.005 s178.9 122 mphV
16. p rF F F
ma mg k v
0, (0)dv kdt mg v v v
Thus, 0dvdt implies 2 ,mg
kv the terminal velocity. If 20 ,mgkv the object will fall faster and faster,
approaching the terminal velocity; if 20 ,mgkv the object will slow down to the terminal velocity.
17. p rF F F
50 5 | |ma v 1 (50 5| |)dv
dt m v
The maximum velocity occurs when ftsec0 or 10 .dv
dt v
18. (a) The model seems reasonable because the rate of spread of a piece of information, an innovation, or a cultural fad is proportional to the product of the number of individuals who have it ( )X and those who do not ( ).N X When X is small, there are only a few individuals to spread the item so the rate of spread is slow. On the other hand, when ( )N X is small the rate of spread will be slow because there are only a few individuals who can receive it during the interval of time. The rate of spread will be fastest when both X and ( )N X are large because then there are a lot of individuals to spread the item and a lot of individuals to receive it.

Section 9.4 Graphical Solutions of Autonomous Equations 705
Copyright 2018 Pearson Education, Inc.
(b) There is a stable equilibrium at X N and an unstable equilibrium at = 0.X 2
22( ) ( ) ( 2 )d x dx dx
dt dtdtk N X kX k X N X N X inflection point at 20, , and .NX X X N
(c)
(d) The spread rate is most rapid when 2 .Nx Eventually all of the people will receive the item.
19. , , , 0di di V VR Rdt dt L L L RL Ri V i i V L R
Equilibrium: 0di V VRdt L R Ri i
Concavity: 2
2
2d i di VR RL dt L Rdt
i
Phase Line:
If the switch is closed at 0,t then (0) 0,i and the graph of the solution looks like this:
As steady state, it .VRt i (In the steady state condition, the self-inductance acts like a simple wire
connector and, as a result, the current through the resistor can be calculated using the familiar version of Ohm’s Law.)
20. (a) Free body diagram of the pearl:

706 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
(b) Use Newton’s Second Law, summing forces in the direction of the acceleration:
.dv m P kdt m mmg Pg kv ma g v
(c) Equilibrium: ( ) 0m P gdv kdt m k v
( )terminal
m P gkv
Concavity: 2
2
2 ( )m P gd v k dv km dt m kdt
v
(d)
(e) The terminal velocity of the pearl is ( ) .m P g
k
9.5 SYSTEMS OF EQUATIONS AND PHASE PLANES
1. Seasonal variations, nonconformity of the environments, effects of other interactions, unexpected disasters, etc.
2. 2 2 3cos sin cos sin cos cosdx d drdt dt dtx r r y x x x y r r r
2 2 3sin cos sin cos sin sindy d drdt dt dty r r x y y x y r r r
Solve for drdt by adding cos eq(1) to to sin eq(2):
2 2 3 3cos sin cos sin cos cos sin cos sin sindr drdt dt r r r r r r
2 3 2 2 3 2 3 2sin cos cos cos sin cos sin sin 1drdt r r r r r r r r r r
Solve for ddt by adding ( sin ) eq(1) to cos eq(2): eq(1) to cos eq(2):
2 2 3 3sin cos sin sin cos cos cos cos sin sind ddt dtr r r r r r r r
2 3 2 3sin sin cos sin cos cos sin cos sin cos 1d ddt dtr r r r r r r r
If 1r (that is, the trajectory starts on the circle 2 2 1x y ), then 21
(1) 1 (1) 0,drdt r
thus the
trajectory remains on the circle, and rotates around the circle in a clockwise direction, since 1.ddt The
solution is periodic since at any point ( , )x y on the trajectory, ( , ) cos , sin 1 cos , 1sinx y r r
cos , sin both x and y are periodic.

Section 9.5 Systems of Equations and Phase Planes 707
Copyright 2018 Pearson Education, Inc.
3. This model assumes that the number of interactions is proportional to the product of x and y:
( ) , 0,dxdt a b y x a
1 .dy y mdt M Mm y n x y y m y nx
To find the equilibrium points: 0 ( ) 0 0 ordx a
dt ba b y x x y
(remember 0ab );
0 0dy mdt My m y n x y .or
;Mnmy x M
Thus there are two equlibrium points, both occur when 0, (0, 0)x and (0, ).M
Implies coexistence is not possible because eventually trout die out and bass reach their population limit.
4. The coefficients a, b, m, and n need to be determined by sampling or by analyzing historical data. Then, more specific graphical predictions can be made. These predictions would then have to be compared to actual population growth patterns. If the predictions match actual results, we have partially validated our model. If necessary, more tests could be run. However, it should be remembered that the primary purpose of a graphical analysis is to analyze the behavior qualitatively. With reference to Figure 9.30, attempt to maintain the fish populations in Region B through stocking and regulation (open and closed seasons). For example, should Regions A or D be entered, restocking the appropriate species can cause a return to Region B.
5. (a) Logistic growth occurs in the absence of the competitor, and simple interaction of the species: growth dominates the competition when either population is small so it is difficult to drive either species to extinction.
(b) a per capita growth rate for trout m per capita growth rate for bass b intensity of competition to the trout n intensity of competition to the bass 1k environmental carrying capacity for the trout 2k environmental carrying capacity for the bass
(c) 1 10 1 1 0 0dx x x
dt k ka x b x y a b y x x or
11 0 0x
ka b y x or
1;a a
b bky x 2 20 1 1 0 0dy y y
dt k km y n x y m nx y y or
21 0y
km nx
708 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
0y or 22 .nk
my k x There are five cases to consider.
Case 2 1I : and .a mb nk k
By picking 2 1anda mb nk k we ensure an equilibrium point exists inside the first quadrant.
Graphical analysis implies four equilibrium points exist: 1 2(0, 0), ( , 0), (0, ),k k and
1 1 2 2 1 2
1 2 1 2,a m k b m k k a m k a n k k
a m b n k k a m b n k k (the point of intersection of the two boundaries in the first quadrant).
All of these equilibrium points are unstable except for the point of intersection. The possibility of coexistence is predicted by this model.
2 1Case II: and .a mb nk k
2(0, ): unstablek 1( ,0): stablek (0,0): unstable Trout wins: 1( , 0)k Not sensitive No coexistence
Case III: 2 1and .a m
b nk k
2(0, ):k stable 1( , 0) :k unstable (0, 0): unstable Bass wins: 2(0, )k Not sensitive No coexistence
Case IV: 2 1and .a m
b nk k
2(0, ):k stable 1( 0):k stable (0, 0): unstable
1 1 2 2 1 2
1 2 1 2, :a m k b m k k a m k a n k k
a m b n k k a m b n k k unstable
Bass or trout: 2 1(0, ) or ( , 0)k k Very sensitive Coexistence is possible but not predicted
Section 9.5 Systems of Equations and Phase Planes 709
Copyright 2018 Pearson Education, Inc.
If we assume 2 1anda mb nk k then graphical analysis implies four equilibrium points exist:
2 1(0, ) , ( ,0), (0, 0),k k and 1 1 2 2 1 2
1 2 1 2,a m k b m k k a m k a n k k
a m b n k k a m b n k k (the point of intersection of the two
boundaries in the first quadrant).
Case 2
12V: and (lines coincide).n ka a
b b k mk
2(0, ):k stable 1( , 0):k stable (0, 0): unstable Line segment joining 2(0, )k and 1( , 0):k stable Bass wins: 2(0, )k Not sensitive Coexistence is likely outcome Note that all points on the line segment joining 2(0, )k and 1( ,0)k are rest points.
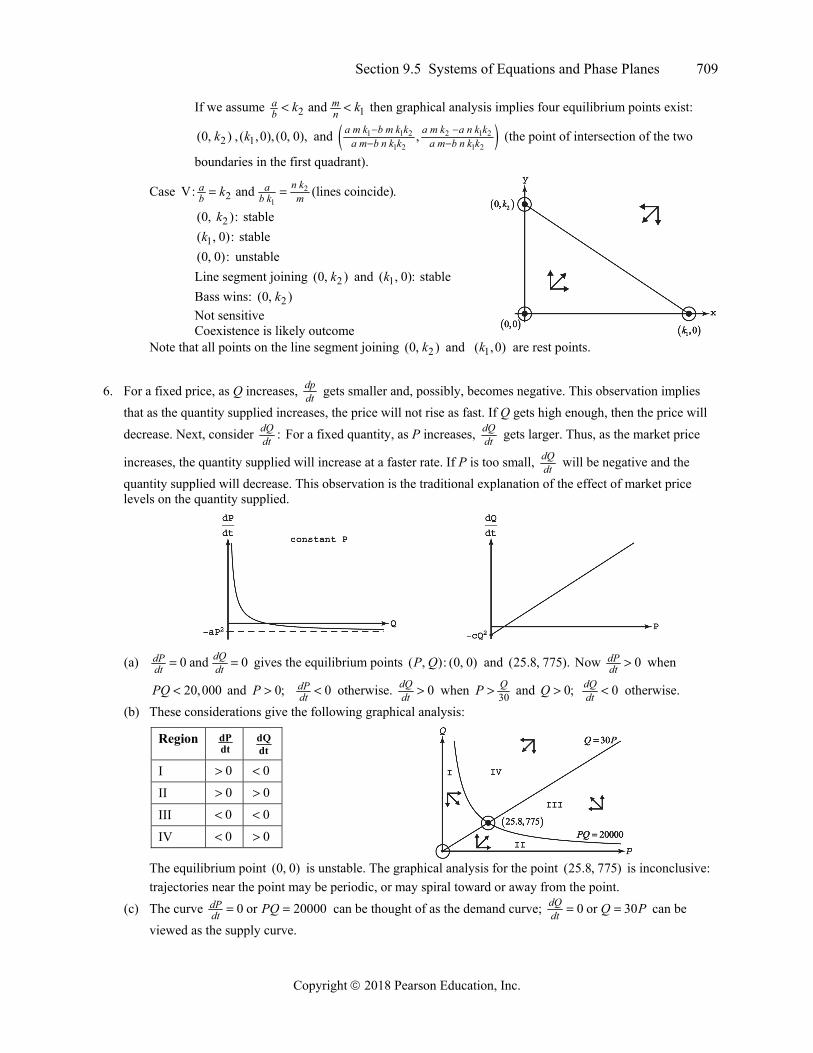
6. For a fixed price, as Q increases, dpdt gets smaller and, possibly, becomes negative. This observation implies
that as the quantity supplied increases, the price will not rise as fast. If Q gets high enough, then the price will decrease. Next, consider :dQ
dt For a fixed quantity, as P increases, dQdt gets larger. Thus, as the market price
increases, the quantity supplied will increase at a faster rate. If P is too small, dQdt will be negative and the
quantity supplied will decrease. This observation is the traditional explanation of the effect of market price levels on the quantity supplied.
(a) 0 and 0dQdPdt dt gives the equilibrium points ( , ): (0, 0)P Q and (25.8, 775). Now 0dP
dt when
20,000PQ and 0;P 0dPdt otherwise. 0dQ
dt when 30QP and 0;Q 0dQ
dt otherwise. (b) These considerations give the following graphical analysis:
Region dPdt dQ
dt
I 0 0 II 0 0 III 0 0 IV 0 0
The equilibrium point (0, 0) is unstable. The graphical analysis for the point (25.8, 775) is inconclusive:
trajectories near the point may be periodic, or may spiral toward or away from the point. (c) The curve 0 or 20000dP
dt PQ can be thought of as the demand curve; 0 or 30dQdt Q P can be
viewed as the supply curve.

710 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
7. (a) ( )dxdt a x b x y a b y x and ( )
( )( )dydtdxdt
m nx ydy dy dy dydxdt dt dx dt dx a b y xm y nx y m nx y
(b) ( )( ) ln lnm n x ydy a m a m
dx a b y x y x y xb dy n dx b dy n dx a y b y m x nx C
ln ln ln ln ln ln ln ,a b y m n x C a b y m nx C a b y m n x Cy e x e e y e x e e y e x e e
let C a b y m nxK e y e Kx e
(c) 1 1( ) ( ) ( )a b y a b y a b y a b yf y y e f y a y e b y e y e a b y and ( ) 0 0f y y or ;aby
10 ( )
a aa ab bf b e f y
has a unique max of when .aa a
y eb bM y 1 1( ) ( ) ( )m nx m n x m n x m nxg x x e g x mx e nx e x e m nx and ( ) 0 0g x x or ;m
nx
10 ( )
m mm mn ng n e g x
has a unique max of mmx enM when m
nx
(d) Consider trajectory ( , ) , .m an bx y For ,
a n x
by mya b y m nx ee x
y e Kx e K taking the limit of both
sides / // /
lim lim .a n x y
b y m x
My eMe xx m n x m n
y a b y a b
K K
Thus, a my
b y n xx
My xMe e
represents the equation any
solution trajectory must satisfy if the trajectory approaches the rest point asymptotically. (e) Pick initial condition 0 .a
by Then, from the figure at right,
0( ) yf y M implies 0
0
amyn x bx
M yxyM e e y
M and thus
.m
nxx
xeM From the figure for ( ),g x there exists a unique
0mnx satisfying .
m
n xx
xeM That is, for each a
by there
is a unique x satisfying .ma
yb y n xx
M xyMe e
Thus, there can exist
only one trajectory solution approaching , .m an b (You can
think of the point 0 0( , )x y as the initial condition for that trajectory.)
(f ) Likewise there exists a unique trajectory when 0 .aby Again, 0( ) yf y M implies 0
0
amyn x b yx
M yxyM e e
M
and thus .m
n xx
xeM From the figure for ( ),g x there exists a unique 0
mnx satisfying .
m
n xx
xeM That is,
for each aby there is a unique x satisfying .
a myb y n xx
My xMe e
Thus, there can exist only one trajectory
solution approaching , .m an b

Section 9.5 Systems of Equations and Phase Planes 711
Copyright 2018 Pearson Education, Inc.
8. Let ,dy dzdx dxz y z y then given the differential equation ( , , ),y F x y y we can write it as the
following system of first order differential equations: dydx z
( , , )dzdx F x y z
In general, for the nth order differential equation given by ( ) ( 1), , , , , ,n ny F x y y y y let 1dydxz y
11 ,dz
dx z y let 22 1 2 , ,dz
dxz z y z y let ( 1) ( )1 2 1 .n n
n n nz z y z y This gives us
the following system of first order differential equations: 1dydx z
12
dzdx z
23
dzdx z
21
ndzndx z
11 2 1, , , , ,ndz
ndx F x y z z z
9. In the absence of foxes 0 dxdtb a x and the population of rabbits grows at a rate proportional to the
number of rabbits.
10. In the absence of rabbits 0 dydtd c y and the population of foxes decays (since the foxes have no
food source) at a rate proportional to the number of foxes.
11. 0dx adt ba b y x y or 0;x 0dy c
dt dc d x y x or 0y equilibrium points at (0, 0)
or , .c ad b For the point (0, 0), there are no rabbits and no foxes. It is an unstable equilibrium point, if there
are no foxes, but a few rabbits are introduced, then dxdt a the rabbit population will grow exponentially
away from (0, 0).
12. Let ( )x t and ( )y t both be positive and suppose that they satisfy the differential equations ( )dxdt a b y x and
( ) .dydt c d x y Let ( ) ( )
( ) ( )( ) ln ( ) ( ) ( ) ln ( ) ( ) ( ) ( )y t x ty t x tC t a y t b y t d x t c x t C t a b y t d x t c
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) 0a c a cy t x t y t x tb y t d x t b c d x t x t d a b y t y t
Since ( ) 0 ( ) constant.C t C t
13. Consider a particular trajectory and suppose that 0 0( , )x y is such that 0cdx and 0 ,a
by then 0dxdt and
0dydt the rabbit population is increasing while the fox population is decreasing, points on the trajectory are
moving down and to the right; if 0cdx and 0 ,a
by then 0dxdt and 0dy
dt both the rabbit and fox
populations are increasing, points on the trajectory are moving up and to the right; if 0cdx and 0 ,a
by then
0dxdt and 0dy
dt the rabbit population is decreasing while the fox population is increasing, points on the
trajectory are moving up and to the left; and finally if 0cdx and 0 ,a
by then 0dxdt and 0dy
dt both the rabbit and fox populations are decreasing, points on the trajectory are moving down and to the left. Thus,

712 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
points travel around the trajectory in a counterclockwise direction. Note that we will follow the same trajectory if 0 0( , )x y starts at a different point on the trajectory.
14. There are three possible cases: If the rabbit population begins (before the wolf ) and ends (after the wolf ) at a value larger than the equilibrium level of ,c
dx then the trajectory moves closer to the equilibrium and the maximum value of the foxes is smaller. If the rabbit population begins (before the wolf ) and ends (after the wolf ) at a value smaller than the equilibrium level of ,c
dx but greater than 0, then the trajectory moves further from the equilibrium and the maximum value of the foxes is greater. If the rabbit population begins and ends very near the equilibrium value, then the trajectory will stay near the equilibrium value, since it is a stable equilibrium, and the fox population will remain roughly the same.
CHAPTER 9 PRACTICE EXERCISES
1. 3/2 3/22( 2) (3 4) 2( 2) (3 4)15 152 2 x x x xy y y yy xe x e dy x x dx e C e C
3/2 3/22( 2) (3 4) 2( 2) (3 4)15 15ln lnx x x xy C y C
2. 2 2 21
2lndyx x xyy xye e x dx y e C
3. 22
seccossec cos 0 tan cos sinx dxdy
xyx dy x y dx y x x x C
4. 22 3/2 22csc2 3 csc 0 3 2 2 2 cos 4 sinx
xx dx y x dy y dy dx y x x x x C
3/2 212 cos 2 siny x x x x C
5. ( 1) ln | |y y ye dx
xy xy ye dy y e x C
6. csc 2csc csc sin cos ( 1)x y y
yx y x xxe e e
yey xe y y y dy xe dx y y x e C
7. ( 1)( 1) 0 ( 1) ln ln( 1) ln( )dy dxy x xx x dy y dx x x dy y dx y x x C
1 1( 1) ( 1)1ln ln( 1) ln( ) ln ln ln C x C x
x xy x x C y y
8. 11
2
ln 1 12 1 21 12 1 11
1 ln ln 2ln lnyydy y ydx
x y yyy y x x C x C C x
9. /2 /212 22 .x xxy y xe y y e
12 /21
2( ) , ( ) .dx xP x v x e e
2 2/2 /2 /2 /2 /2 /2 /212 2 2 2 4 4
x x x x x x xx x d x x xdxe y e y e e e y e y C y e C

Chapter 9 Practice Exercises 713
Copyright 2018 Pearson Education, Inc.
10. 2 sin 2 2 sin .y x xy e x y y e x 2 2( ) 2, ( ) .dx xP x v x e e
2 2 2 2 22 2 sin 2 sin 2 sin sin cosx x x x x x x x xddxe y e y e e x e x e y e x e y e x x C
2sin cosx xy e x x Ce
11. 21 2 1 12 1 .x x x
xy y x y y
22 2ln ln 2( ) .dxx x xv x e e e x
2
22 2 2 1 1
2 22 1 1d x Cdx x x
x y xy x x y x x y x C y
12. 12 ln 2ln .xxy y x x y y x
ln 1( ) .dxx x
xv x e e
2 2 21 1 2 1 2 1ln ln ln lndx x x dx x x xy y x y x y x C y x x Cx
13. 1 11 0 1 .
x x
x xx x x x x x e e
e ee dy ye e dx e y e y e y y
1ln 1
( ) 1.xe dx x
xee xv x e e e
1 11 1 1 1 1
x x
x xx x x x x x xe e d
dxe ee y e y e e y e e y e C
1 1
x x
x xe C e Ce e
y
14. 4 0 4 ( ) 1,dyx x xdxe dy e y x dx y xe p x 1 2( ) 4dx dyx x x x
dxv x e e e ye x e
2 2 2 24 4 2 2x x x x x x x x x xddx y e x e y e x e dx y e xe e C y xe e Ce
15. 2 2 2 33 0 3 3ddxx y dy y dx x dy y dx y dy xy y dy xy y C
16. 2 333 cos 0 cos .xx dy y x x dx y y x x Let 3 33ln ln 3( ) .
dxx x xv y e e e x
Then 3 23 cosx y x y x and 3 cos sin .x y x dx x C So 3 siny x x C
17. 23 2 3
cossin cos sin dy
yy x y x dx 2 2sec sin (1 cos ) y dy x x dx
313tan cos cosy x x C
18. 4 ( ) 0x dy x y dx 4 ( ) x dy x y dx 3 yxy x 31 ;xy y x
1 ln( ) x dx xv x e e x 4xy y x 4( )d
dx xy x 4 515 xy x dx x C 41
5Cxy x

714 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
19. 22 0x xdy x y e dx 2
2 x xdy x y e dx 2
2 ;x xy xy xe let 22 ( ) x dx xv x e e
2 22x x xe y xe y xe 2x xd
dx e y xe 2x xe y xe dx
2x x xe y xe e C
20. 2 23 7y x y x 2 33( ) x dx xv x e e
3 3 32 23 7x x xe y x e y x e 3 327x xD e y x e
3 327x xe y x e dx 3 373
x xe y e C 37
3xy Ce
21. ln lny xy x y ln ln dyy y x x dx 2 21 1
2 4ln ln lny x x x C
22. 2 ln lnxy y x x 2ln lnx xx xy y
2ln 2 (ln ) ln( )x
x dx x xv x e e x 2 2 2(ln ) (ln ) (ln )2ln lnx x xx x
x xe y e y e 2 2(ln ) (ln )lnx xxxD e y e
2 2(ln ) (ln )lnx xxxe y e dx
2 2(ln ) (ln )12
x xe y e C 2(ln )1
2xy Ce ln
1 12 xx
y C
23. 21 1( 1) 2 .dy x
dx x xx y x y y Let
2 21 2ln( 1) ln( 1) 2( ) ( 1) .x dx x xv x e e e x
So 2 2 2 2 22( 1) ( 1)( 1) ( 1) ( 1) ( 1) ( 1) ( 1) ( 1)x dx x dxy x x y x y x x x y x x x dx
3 2 3 22 23 2 3 2( 1) ( 1) .x x x xy x C y x C We have (0) 1 1 .y C So
3 223 2( 1) 1x xy x
24. 2 2 12 1 .dydx x xx y x y y x Let 2 2ln 2( ) .x dx xv x e e x So 2 32x y xy x x
4 2 2
22 3 2 1
4 2 4 2 .d x x x Cdx x
x y x x x y C y We have 1 1 14 2 4(1) 1 1 .y C C
2 4 2
2 22 11 1
4 24 4So x x x
x xy
25. 2 23 .dydx x y x Let
2 33( ) .x dx xv x e e So 3 3 3 3 32 2 23x x x x xddxe y x e y x e e y x e
3 313 .x xe y e C We have
3 30 01 1 43 3 3(0) 1 1 1y e e C C C and
3 31 43 3
x xe y e 31 4
3 3xy e
26. cos1cos 0 cos 0 .xx xxdy y x dx xy y x y y Let
1 ln( ) .x dx xv x e e x
So 1 cos cos cos sin .dx dxxy x y x xy x xy x dx xy x C
We have 2 20 0 1 1.y C C So 1 sin1 sin xxxy x y

Chapter 9 Practice Exercises 715
Copyright 2018 Pearson Education, Inc.
27. 3 22( 2) 3 3 .x xxxxy x y x e y y x e Let 2
22ln( ) .
x xx dx x x e
xv x e e
So 2 2 2 22 3 3 3 .
x x x xe e x d e ex dxx x x x
y y y y x C We have (1) 0 0 3(1) 3y C C
223 3 (3 3)
x xex
y x y x e x
28. 3 2 3 32 23 2 0 0 1 .x xydx dx x dxdy y dy y y dy y yy dx x xy dy x x
3ln 33( ) 1 ( ) 3ln ( ) y y yyP y P y dy y y v y e y e
3 3 2 3 2 23 1 2 2 2 2 2y y y y y yyy e x y e x y e y e x y e dy e y y C
22 2 23 .yy y Ce
xy
We have 12(1 2 2)
2(2) 1 1 4Cey C e and
2 12 2 2 43yy y e
xy
29. To find the approximate values let 1 1 1cos (0.1)n n n ny y y x with 0 00, 0,x y and 20 steps. Use a spreadsheet, graphing calculator, or CAS to obtain the values in the following table.
x y 0 0 0.1 0.1000 0.2 0.2095 0.3 0.3285 0.4 0.4568 0.5 0.5946 0.6 0.7418 0.7 0.8986 0.8 1.0649 0.9 1.2411 1.0 1.4273
x y 1.1 1.6241 1.2 1.8319 1.3 2.0513 1.4 2.2832 1.5 2.5285 1.6 2.7884 1.7 3.0643 1.8 3.3579 1.9 3.6709 2.0 4.0057
30. To find the approximate values let 1 1 12 2 3 (0.1)n n n ny y y x with 0 03, 1,x y and 20 steps. Use a spreadsheet, graphing calculator, or CAS to obtain the values in the following table.
x y –3.0 1.0000 –2.9 0.7000 –2.8 0.3360 –2.7 –0.0966 –2.6 –0.5998 –2.5 –1.1718 –2.4 –1.8062 –2.3 –2.4913 –2.2 –3.2099 –2.1 –3.9393 –2.0 –4.6520
x y –1.9 –5.3172 –1.8 –5.9026 –1.7 –6.3768 –1.6 –6.7119 –1.5 –6.8861 –1.4 –6.8861 –1.3 –6.7084 –1.2 –6.3601 –1.1 –5.8585 –1.0 –5.2298
31. To estimate (3),y let 1 1
1
21 1 (0.05)n n
n
x yn xy y
with initial values 0 00, 1,x y and 60 steps. Use a
spreadsheet, graphing calculator, or CAS to obtain (3) 0.8981.y
716 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
32. To estimate (4),y let 2
1 1
1
2 11 (0.05)n n
n
x yn n xz y
with initial values 0 01, 1,x y and 60 steps. Use a
spreadsheet, graphing calculator, or CAS to obtain (4) 4.4974.y
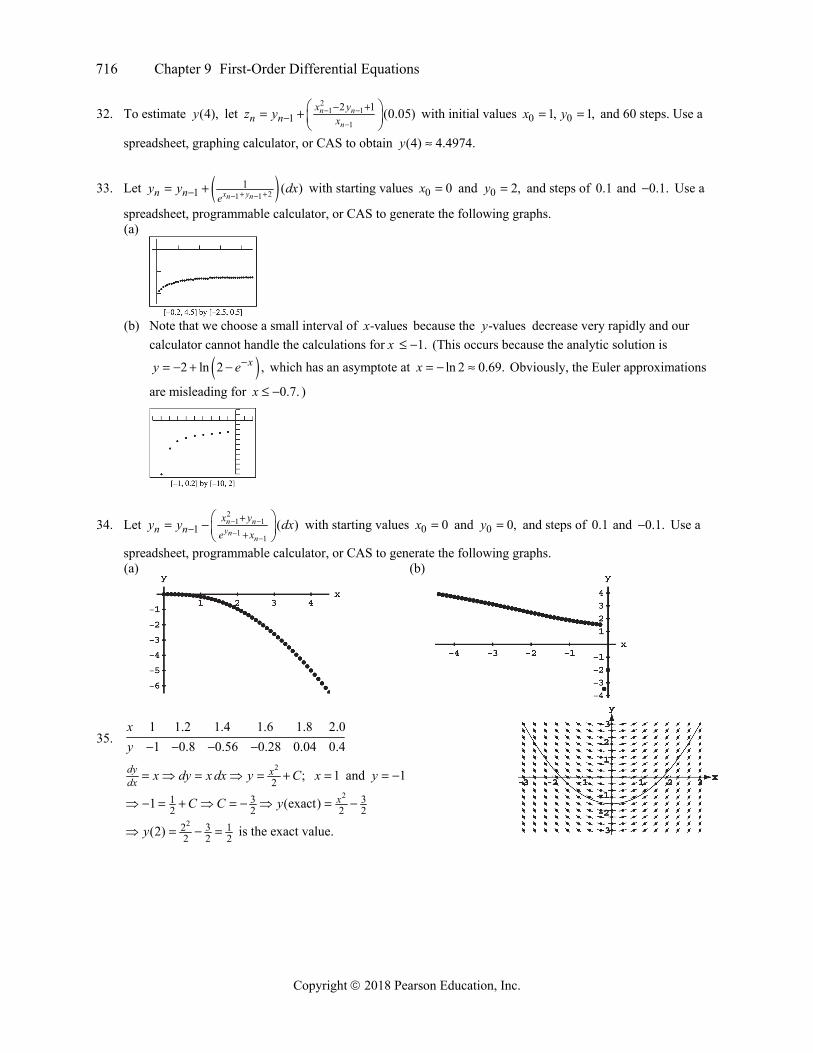
33. Let 21 11
1 ( )x yn nn n ey y dx with starting values 0 0x and 0 2,y and steps of 0.1 and 0.1. Use a
spreadsheet, programmable calculator, or CAS to generate the following graphs. (a)
(b) Note that we choose a small interval of -valuesx because the -valuesy decrease very rapidly and our
calculator cannot handle the calculations for x 1. (This occurs because the analytic solution is
2 ln 2 ,xy e which has an asymptote at ln 2 0.69.x Obviously, the Euler approximations
are misleading for 0.7.x )
34. Let 2
1 11
11 ( )n n
ynn
x yn n e x
y y dx
with starting values 0 0x and 0 0,y and steps of 0.1 and 0.1. Use a
spreadsheet, programmable calculator, or CAS to generate the following graphs. (a)
(b)
35. 1 1.2 1.4 1.6 1.8 2.01 0.8 0.56 0.28 0.04 0.4
xy
2
2 ;dy xdx x dy x dx y C 1x and 1y
23 312 2 2 21 (exact) xC C y
2 32 12 2 2(2)y is the exact value.

Chapter 9 Practice Exercises 717
Copyright 2018 Pearson Education, Inc.
36. 1 1.2 1.4 1.6 1.8 2.01 0.8 0.6333 0.4904 0.3654 0.2544
xy
1 1 ln | | ;dydx x xdy dx y x C 1x and 1y
1 ln1 1 (exact) ln | | 1C C y x (2) ln 2 1 0.3069y is the exact value.
37. 1 1.2 1.4 1.6 1.8 2.01 1.2 0.488 1.9046 2.5141 3.4192
xy
2
2lndy dy xdx yxy x dx y C
2 2 22 2 21 ;
x x xC Cy e e e C e 1x and 1y 221/2 1/2 1/2
1 11 (exact)x
C e C e y e e
2 1 /2 3/2(2) 4.4817x
e y e
is the exact value.
38. 1 1.2 1.4 1.6 1.8 2.01 1.2 1.3667 1.5130 1.6452 1.7688
xy
21 ;dy ydx y yy dy dx x C 1x and 1y
21 12 21 2 1C C y x
(exact) 2 1 (2) 3 1.7321y x y is the exact value.
39. 2 1 ( 1)( 1).dydx y y y y We have 0 ( 1) 0, ( 1) 0 1, 1.y y y y
(a) Equilibrium points are 1 (stable) and 1 (unstable) (b) 2 21 2 2 1 2 ( 1)( 1).y y y yy y y y y y y So 0 0, 1, 1.y y y y
(c)

718 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
40. 2 (1 ).dydx y y y y y We have 0 (1 ) 0 0, 1 0 0, 1.y y y y y y
(a) The equilibrium points are 0 and 1. So, 0 is unstable and 1 is stable. (b) Let increasing. decreasing.
2 2 2 2 2 3 3 22 2 2 2 2 3y y y y y yy y y y y y y y y y y y y y y
22 3 1 (2 1)( 1).y y y y y y y So, 120 0, 2 1 0, 1 0 0, , 1.y y y y y y y
Let concave up, concave down.
(c)
41. (a) Force Mass times Acceleration (Newton’s Second Law) or .F ma Let .dv dv ds dvdt ds dt dsa v Then
2 2 2 2 2 2 2 2 2 2dvdsma mgR s a gR s v gR s v dv gR s ds v dv gR s ds
2 2 22 2 221 12 2 .gR gR gRv
s s sC v C C When 00,t v v and 222
0gRRs R v C
222 2 20 02 2gR
sC v gR v v gR
(b) If 0 2 ,v gR the 2 22 22 ,gR gR
s sv v since 0v if 0 2 .v gR Then 22gRds
dt s
2 1/2 2 3/2 2 3/2 23213 22 2 2 2 ;s ds gR dt s ds gR dt s gR t C s gR t C
0t
and 3/2 2 3/2 3/2 2 3/2 3/23 3 32 2 22 (0) 2 2s R R gR C C R s gR t R R g t R
0 02/33 2 3 33/2 1/2 3/2 3/23
2 2 2 22 1 1 1 1gR v vR R RR R g t R t R t s R t
Chapter 9 Practice Exercises 719
Copyright 2018 Pearson Education, Inc.
42. 0v mk coasting distance (0.86)(30.84) 0.97 27.343.k k 0 ( / )( ) 1v m k m t
ks t e
(27.343/30.84) 0.8866( ) 0.97 1 ( ) 0.97 1 .t ts t e s t e A graph of the model is shown superimposed
on a graph of the data.
43. 12 lb. 6 gal. 4 gal. lbs.gal. min 100 2 gal. min
dS Sdt t
4100 2 3dS
dt t S 4
100 2 2ln(100 2 ) 2( ) (100 2 )t dt tv t e e t
2 22 31 1 1
2(100 2 ) (100 2 )3(100 2 ) (100 2 )
t tS t dt t c
2(100 2 )
50 ct
S t
and (0) 10 lbsS
10,00010 50 400,000c c 2400,000
(100 2 )50
tS t
(a) 1 min 100 2 102 gal, 10 min 100 2(10) 120 gal, 60 min 100 2(60) 220 gal
(b) (1) 12.55 lbs,S (10) 32.22 lbs,S (60) 101.74 lbsS
44. 4 gal. 5 gal.0 lbs lbs.gal. min 200 gal. min
dS Sdt t 5
200 0dSdt t S
5200
5 5ln(200 ) 1
(200 )( ) t dt t
tv t e e
5 5(200 ) 0 (200 )S t dt c t 5(200 )S c t and (0) 50 lbsS
45 1
4(200)50 (200)c c
5
4(200 )4(200)
tS
(a) 1 mint 200 1 199 gal, 10 mint 200 10 190 gal, 200 mint 200 200 0 gal
(b) (1) 48.76 lbs,S (30) 22.19 lbs,S
(c) 5 lbsS 5
4(200 )4(200)
5 t 4 520(200) (200 )t 4 1 5200 (20(200) )t
4 1 5200 (20(200) ) 73.8 mint 200 73.8 126.2 gal of solution

720 Chapter 9 First-Order Differential Equations
Copyright 2018 Pearson Education, Inc.
CHAPTER 9 ADDITIONAL AND ADVANCED EXERCISES
1. (a) 1lndy dy dyA A A A Adt V V y c V y c V Vk c y dy k y c dt k dt k dt y c k t C
1 .AVk tCy c e e Apply the initial condition, 0 0 0(0)y y y c C C y c
0 .AVk ty c y c e
(b) Steady state solution: 0 0lim ( ) lim (0)AVk t
tty y t c y c e c y c c
2. .d mv d mvdm dm dv dm dm dm dv dmdt dt dt dt dt dt dt dt dt dtF v u F v u F m v v u F m u
.dmdt b m b t C At 00, ,t m m so 0C m and 0 .m m b t
Thus 0
000 0 1lnu b m b tdv dv
dt dt mm b tF m b t u b m b t g g v gt u C
0v at 10 0.t C So 0 0
0 0ln lnm b t m b tdy
m dt mv gt u y gt u dt and , 0u c y at
0 0
0
2120 lnm b t m b t
mbt y gt c t
3. (a) Let y be any function such that ( ) ( ) ( ) ,v x y v x Q x dx C ( )( ) .P x dxv x e Then
( ) ( ) ( ) ( ) ( ).ddx v x y v x y y v x v x Q x We have ( )( ) P x dxv x e
( )( ) ( ) ( ) ( ).P x dxv x e P x v x P x Thus ( ) ( ) ( ) ( ) ( ) ( ) ( )v x y y v x P x v x Q x y yP x Q x the given y is a solution.
(b) If v and Q are continuous on [ , ]a b and ( , ),x a b then 0
( ) ( ) ( ) ( )xd
dx xv t Q t dt v x Q x
0( ) ( ) ( ) ( ) .
xx
v t Q t dt v x Q x dx So 0 0 ( ) ( ) .C y v x v x Q x dx From part (a),
( ) ( ) ( ) .v x y v x Q x dx C Substituting for C: 0 0( ) ( ) ( ) ( ) ( ) ( )v x y v x Q x dx y v x v x Q x dx
0 0( )v x y y v x when 0.x x
4. (a) 0( ) 0, ( ) 0.y P x y y x Use ( )( ) P x dxv x e as an integrating factor. Then ( ) 0ddx v x y
( )( ) P x dxv x y C y Ce and ( )1 1 ,P x dxy C e ( )
2 2 ,P x dxy C e 1 0 2 0 0,y x y x
( ) ( )1 2 1 2 3
P x dx P x dxy y C C e C e and 1 2 0 0 0.y y So 1 2y y is a solution to
( ) 0y P x y with 0 0.y x
(b) ( ) ( )1 2 1 2 1 2 3( ) ( ) ( ) 0.P x dx P x dxd d d d
dx dx dx dxv x y x y x e e C C C C C
1 2 1 2( ) ( ) ( ) ( ) ( ) ( ) 0ddx v x y x y x dx v x y x y x dx C
(c) ( )1 1 ,P x dxy C e ( )
2 2 ,P x dxy C e 1 2.y y y So ( ) ( )0 1 20 0P x dx P x dxy x C e C e
1 2 1 2 1 20 ( ) ( )C C C C y x y x for .a x b

Chapter 9 Additional and Advanced Exercises 721
Copyright 2018 Pearson Education, Inc.
5. 2 2
2 2 1 1/ ( )0 ( ) 0
x ydy y y yx dx dvdx xy y x y x x x v x v F vx y dx x ydy F F v v
21
22142 1
0 ln ln 2 1 4ln ln 2 1v
vdv ydx dv dxx x xvv v
C x v C x C
2 2
224 2 2 2 2 2 2 2 2 2ln ln ln 2 2 2y x C
xx C x y x C x y x e x y x C
6. 2
2 2
22 2 20 ( ) 0y x ydy dy y y y dx dv
dx dx x x x xx v v vx dy y x y dx F F v v v
21 1
/ln ln lndx dv xx v y x yv
C x C x C x C
7. // /0 ( ) 0
y x
vxe ydy y yy x y x v dx dv
dx x x x x v e vxe y dx xdy e F F v e v
/ln lnvv y xdx dv
x eC x e C x e C
8.
211
1 111 11
0 ( ) 0 0yx
y vvx
x y v dvdy y v dx dv dxdx x y x v x x vv
x y dy x y dx F F v
2 2
21 2 1121 1
0 ln tan ln 1 2ln 2 tan ln 1vdv ydx dvx xv v
x v v C x v C
2 2
22 1 1 2 2ln 2 tan ln 2 tan lny y x y
x xxx C y x C
9. cos 1cos cos 1 ( ) cos 1 0y y x y y y dx dv
x x x x x x v v vy F F v v v
sec 1 0 ln ln sec 1 tan 1 ln ln sec 1 tan 1y ydxx x xv dv x v v C x C
10. sin cos
cossin cos cos 0 tan ( ) tan
y yx x
yx
x yy y y dy y y yx x x dx x x xx
x y dx x dy F F v v v
tan 0 cot 0 ln ln sin ln ln sin ydx dv dxx x xv v v
v dv x v C x C










![Differential Geometry Jay Havaldar v[x] = dx dx v1 + dx dy v2 + dx dz v3 = v1 Intermsofthegradient: dx= v[x] = (1;0;0) v= v1 In other words, the differentialdxis a function which sends](https://img.pdfslide.net/doc/110x75/5b1ce2f07f8b9af2348c42c4/differential-geometry-jay-havaldar-vx-dx-dx-v1-dx-dy-v2-dx-dz-v3-v1-intermsofthegradient.jpg)