Embed Size (px)
Citation preview
Collaborative Robot Technology and Applications
Mike Beaupre KUKA Robotics

Collaborative Robots Introduction
What is Collaboration?
Source: Wikipedia
Definition of collaboration: Collaboration noun Syllabification: col·lab·o·ra·tion Pronunciation: [kuh-lab-uh-rey-shuhn]
• The action of working with someone to produce or create something
• Working with others to do a task and to achieve shared goals.
• Flexibility is an essential element of collaboration.

Early Collaboration Ideas
Source: Robot Magazine www.botmag.com
1966 - Unimate robot demonstrated on the Tonight Show

Source: Photo by Frank Q. Brown / Los Angeles Times Archive, UCLA
1967 - Unimate robot on display at the Biltmore Hotel in Los Angeles
Early Collaboration Ideas
Definitions & Terms Collaborative Robot – a robot specifically designed for direct interaction with a human within a defined collaborative workspace
Collaborative Workspace - safeguarded space where the robot and a human can perform tasks simultaneously during automatic operation
Collaborative Operation (Human-Robot Interaction) - state in which purpose designed robots can safety work in direct cooperation with a human within a defined workspace
Intelligent Assist Device (IAD) is a Smart lift assist device, generally not incorporating an autonomous operation mode
Cobot - an abbreviation of Collaborative Robot and also synonymous with Intelligent Assist Device
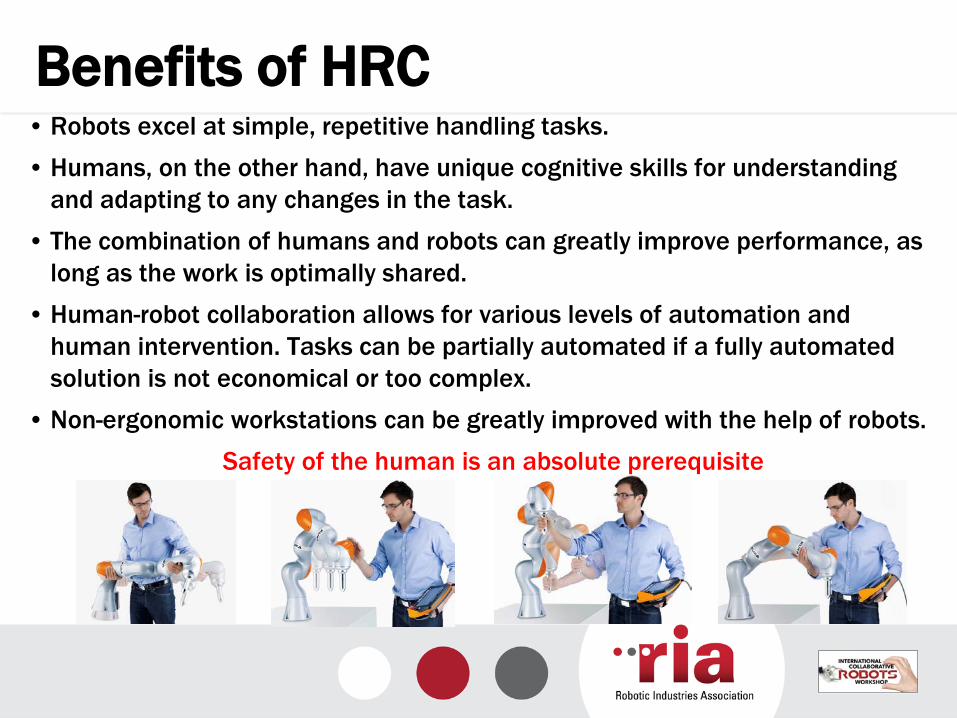
Benefits of HRC • Robots excel at simple, repetitive handling tasks. • Humans, on the other hand, have unique cognitive skills for understanding
and adapting to any changes in the task. • The combination of humans and robots can greatly improve performance, as
long as the work is optimally shared. • Human-robot collaboration allows for various levels of automation and
human intervention. Tasks can be partially automated if a fully automated solution is not economical or too complex.
• Non-ergonomic workstations can be greatly improved with the help of robots. Safety of the human is an absolute prerequisite
Key Robot Features Collaborative Robots also incorporate one or more of the following features:
• Safety-rated Stop Monitoring
• Hand Guiding – Teaching by Demonstration
• Speed and Separation Monitoring
• Power and Force Limiting
Key Robot Functions • Operation in Automatic Mode with a Person in the
Collaborative Workspace - When the person acts - the robot reacts
• Incorporating Specific Safety Design Features to Protect the Person from Injury - The robot‘s behavior can be easily programmed through software
• Can Have Both Autonomous and Collaborative Phases in an Automatic Work Cycle - Flexible adaption of the robot’s characteristics to an individual task - Tasks are solved through compliance, rather than programmed positions
Robot Safety Features
• Safe velocity monitoring • Safe workspaces and safeguarded zones • Safe collision detection (free collisions possible) • Safe force monitoring (avoidance of pinching or crushing) • Safe tool detection • Safe switching of states (i.e. safe protection zones)
Relevant safety features to minimize risk of a HRC application in accordance with applicable standards (ISO 10218-1:2011)
The current standard EN ISO 10218-1:2011 states that the robot is only one component in a robot system and that it is in itself insufficient for safe collaborative operation.
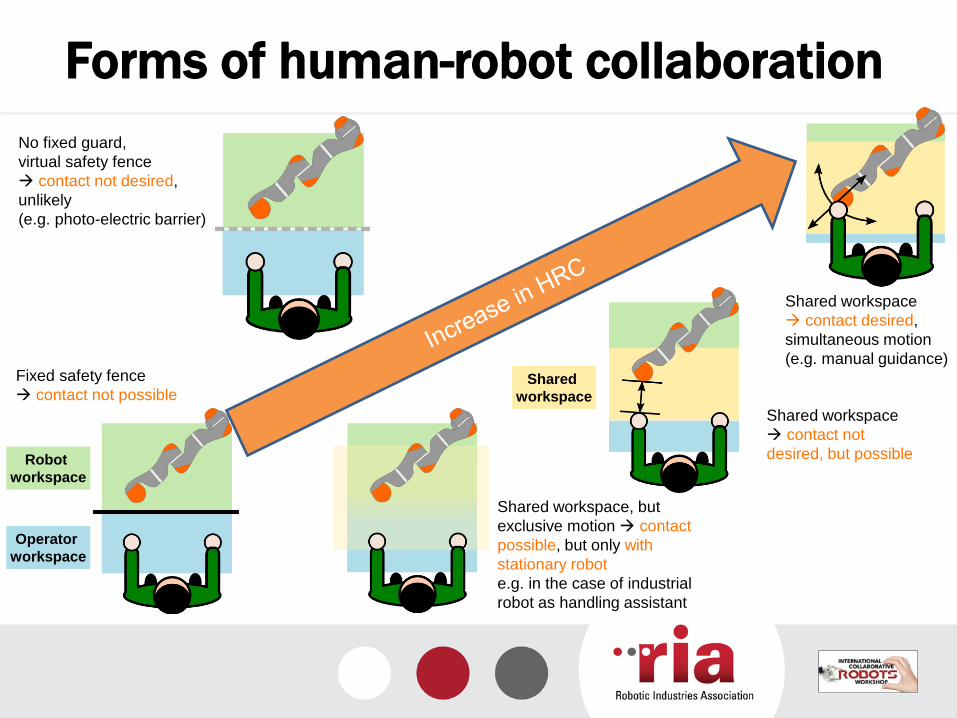
Forms of human-robot collaboration
Shared workspace, but exclusive motion contact possible, but only with stationary robot e.g. in the case of industrial robot as handling assistant
No fixed guard, virtual safety fence contact not desired, unlikely (e.g. photo-electric barrier)
Fixed safety fence contact not possible
Robot workspace
Operator workspace
Shared workspace
Shared workspace contact not desired, but possible
Shared workspace contact desired, simultaneous motion (e.g. manual guidance)
Video – Best Fit Joining

Video – Adaptive Assembly
Other Enhancement Features
• Sensitivity – integral force & torque sensors
• Distance sensing – vision or radar sensors
• Voice interpretation – verbal command functions
1) Advancements in Robot and Sensor Technologies
Evolution of Enablers
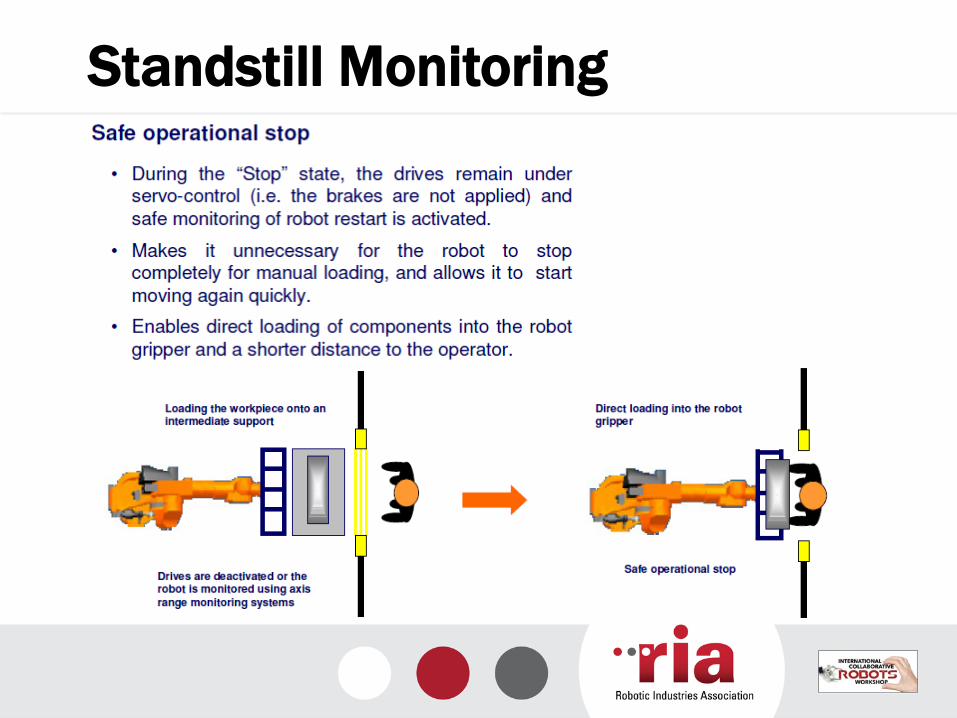
Standstill Monitoring
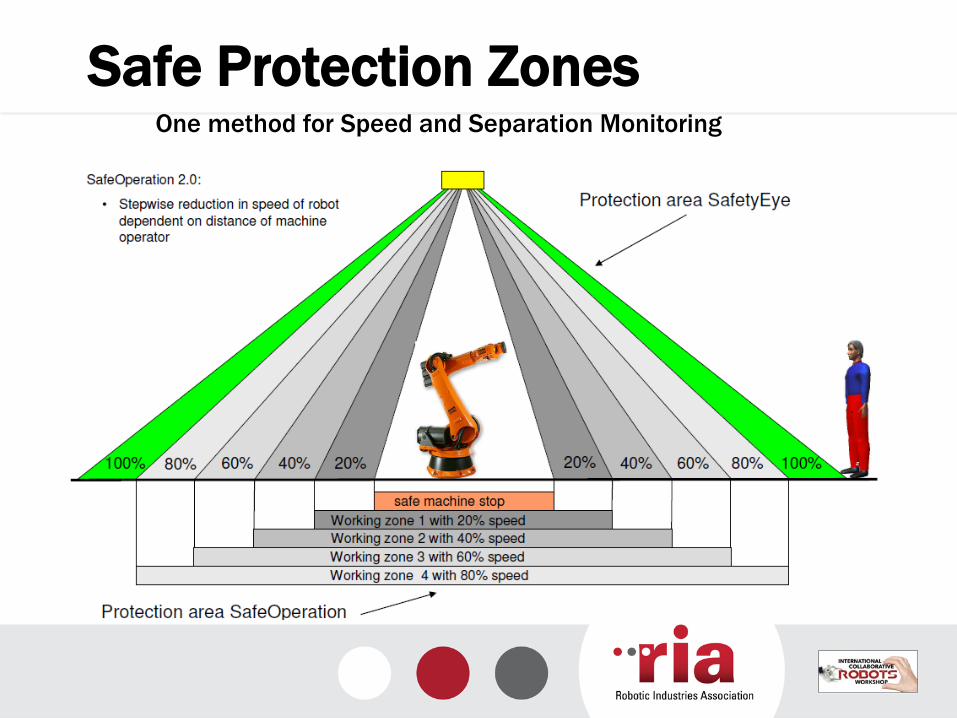
Safe Protection Zones One method for Speed and Separation Monitoring
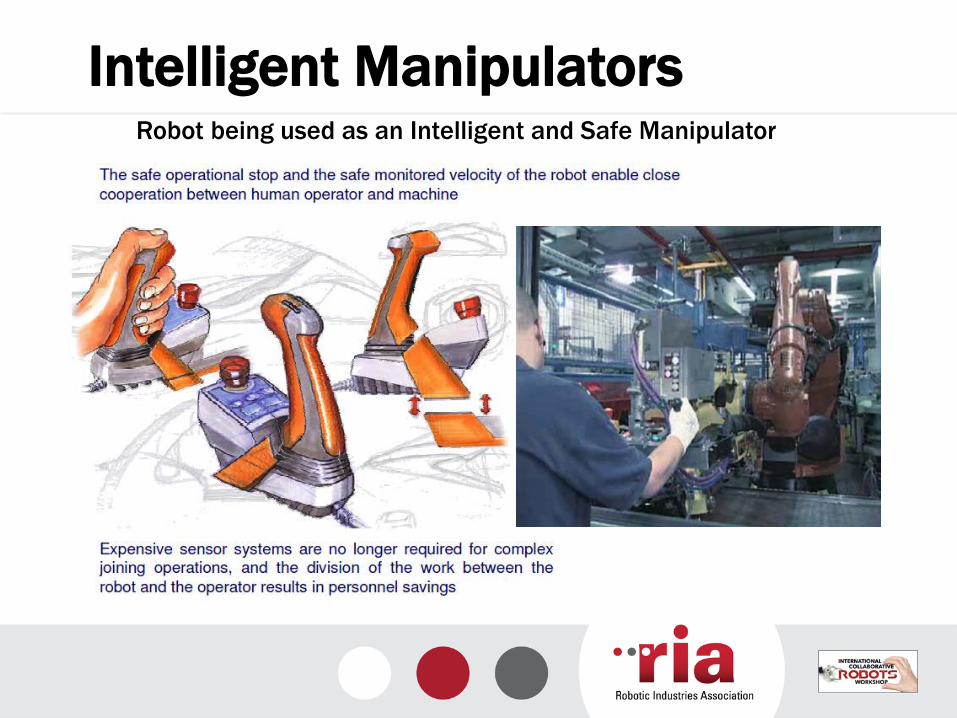
Intelligent Manipulators Robot being used as an Intelligent and Safe Manipulator
Evolution of Enablers
2) Advancements in Safe Robot Applications
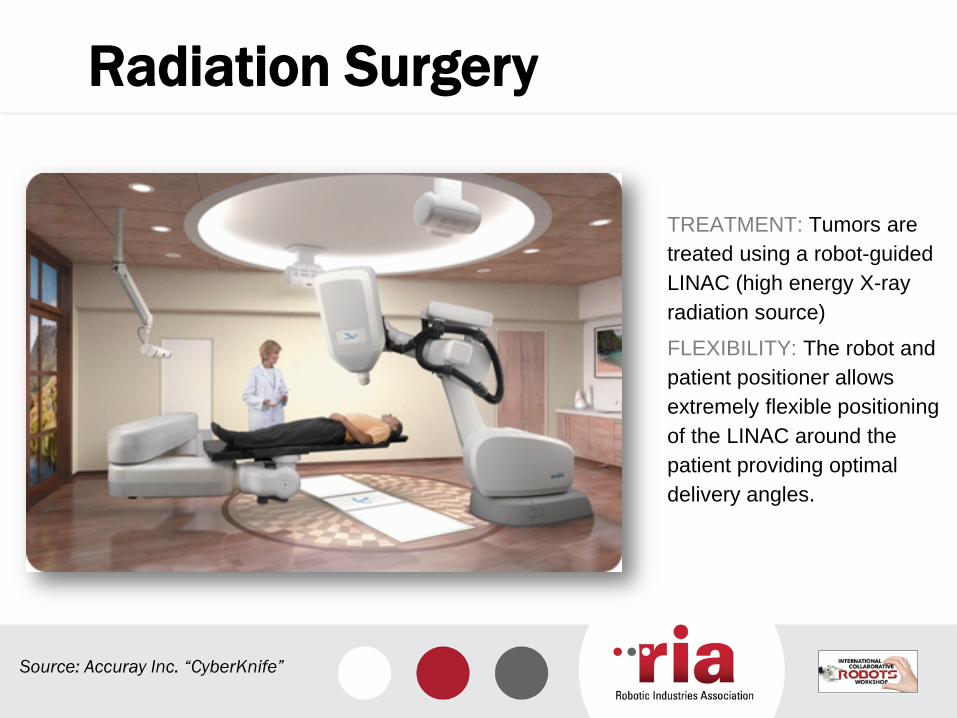
Radiation Surgery
Source: Accuray Inc. “CyberKnife”
TREATMENT: Tumors are treated using a robot-guided LINAC (high energy X-ray radiation source)
FLEXIBILITY: The robot and patient positioner allows extremely flexible positioning of the LINAC around the patient providing optimal delivery angles.
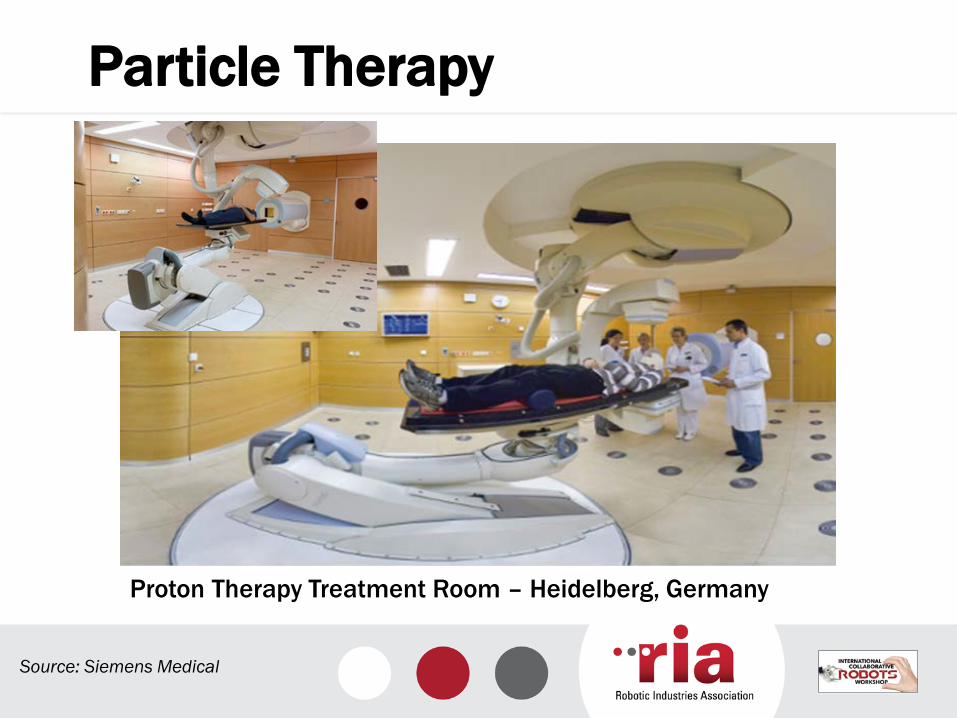
Particle Therapy
Source: Siemens Medical
Proton Therapy Treatment Room – Heidelberg, Germany

Angiography RANGE: allows full coverage of the patients body from head to toe. PRECISION: 0.7mm positioning accuracy ensures high imaging quality. SPEED: C-arc can be rotated quickly enabling a complete volume scan and stable image. VERSATILE: allows for rapid switch from interventional to surgical use.
Source: Siemens Medical “Artis Zeego”
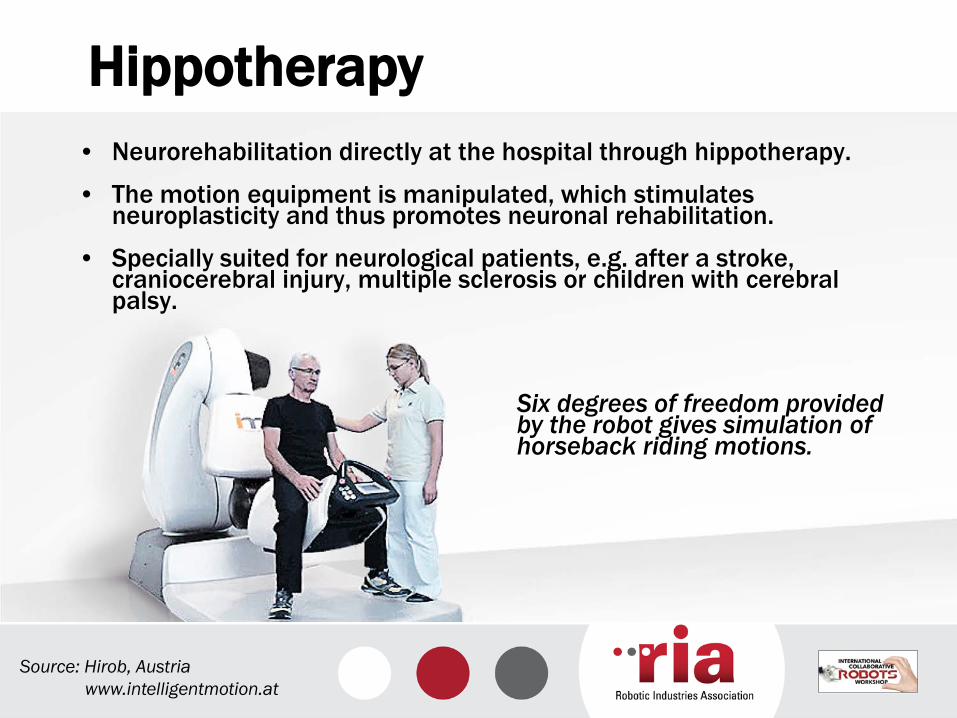
Hippotherapy • Neurorehabilitation directly at the hospital through hippotherapy.
• The motion equipment is manipulated, which stimulates
neuroplasticity and thus promotes neuronal rehabilitation.
• Specially suited for neurological patients, e.g. after a stroke, craniocerebral injury, multiple sclerosis or children with cerebral palsy.
Six degrees of freedom provided by the robot gives simulation of horseback riding motions.
Source: Hirob, Austria www.intelligentmotion.at
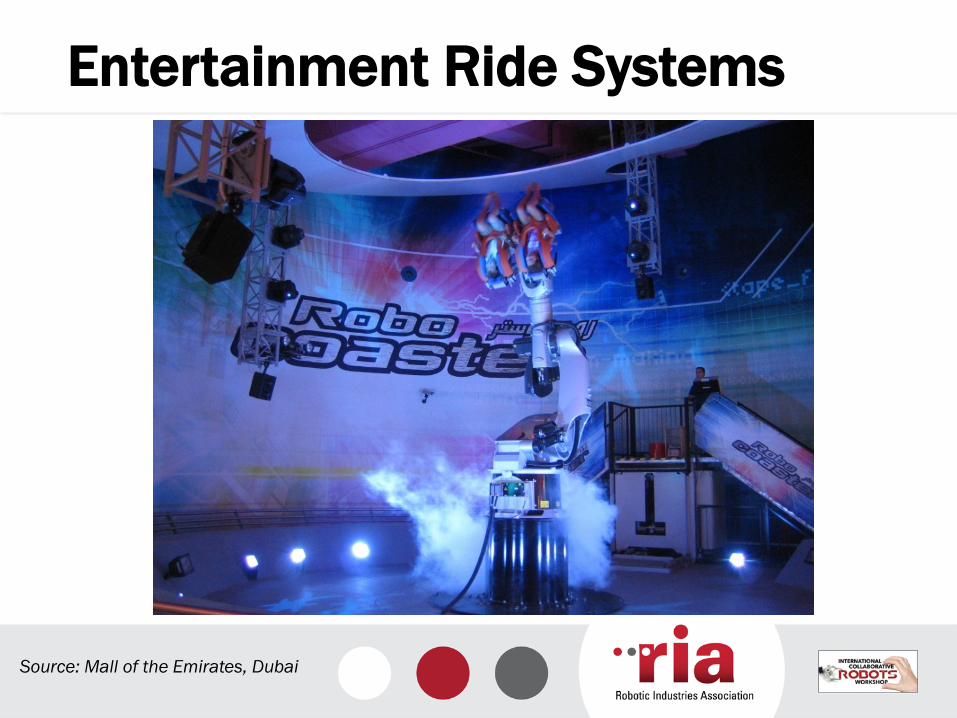
Entertainment Ride Systems
Source: Mall of the Emirates, Dubai
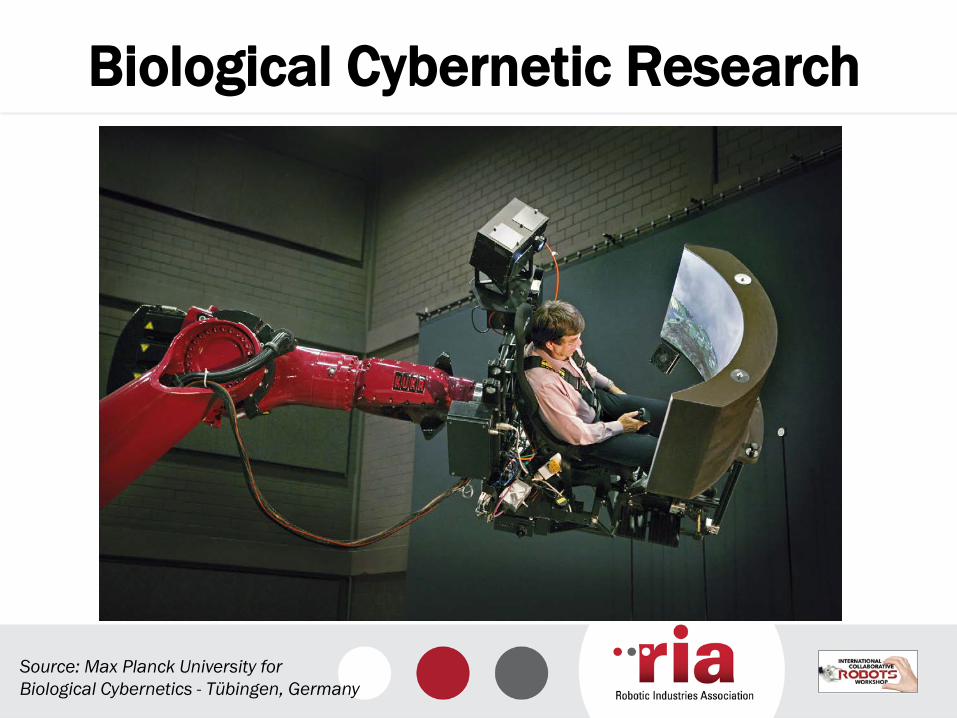
Biological Cybernetic Research
Source: Max Planck University for Biological Cybernetics - Tübingen, Germany
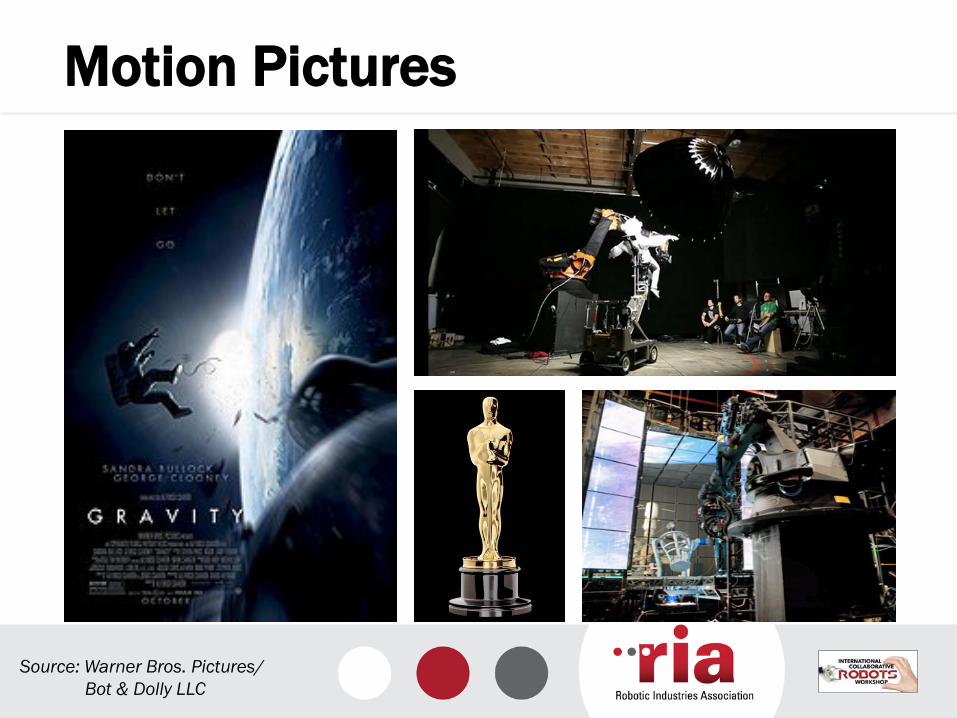
Motion Pictures
Source: Warner Bros. Pictures/ Bot & Dolly LLC
Evolution of Enablers
3) Collaborative Application Development
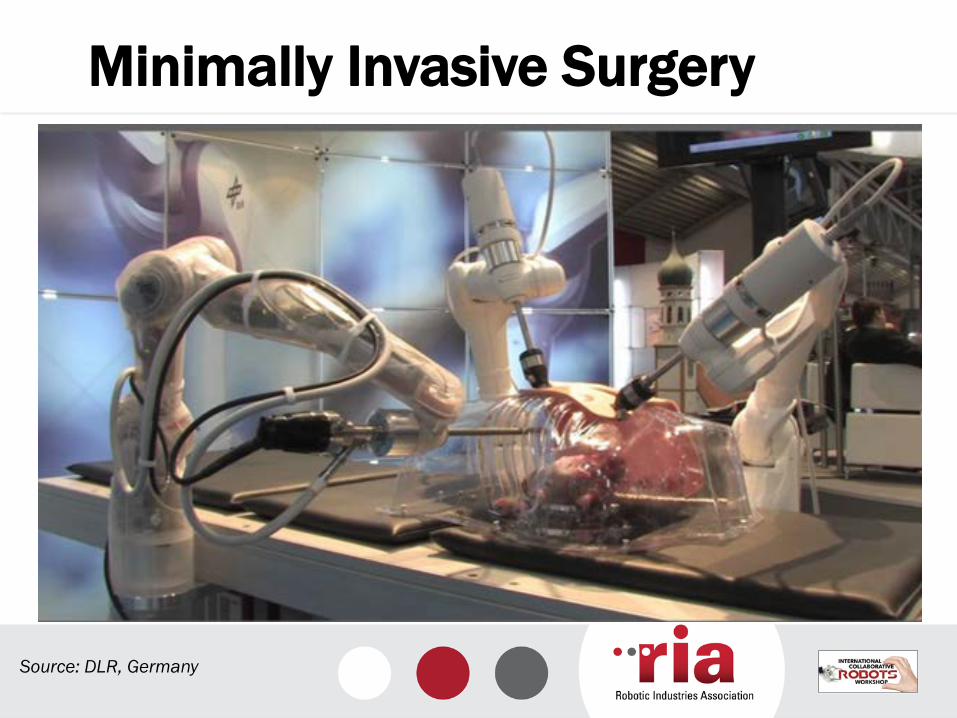
Minimally Invasive Surgery
Source: DLR, Germany
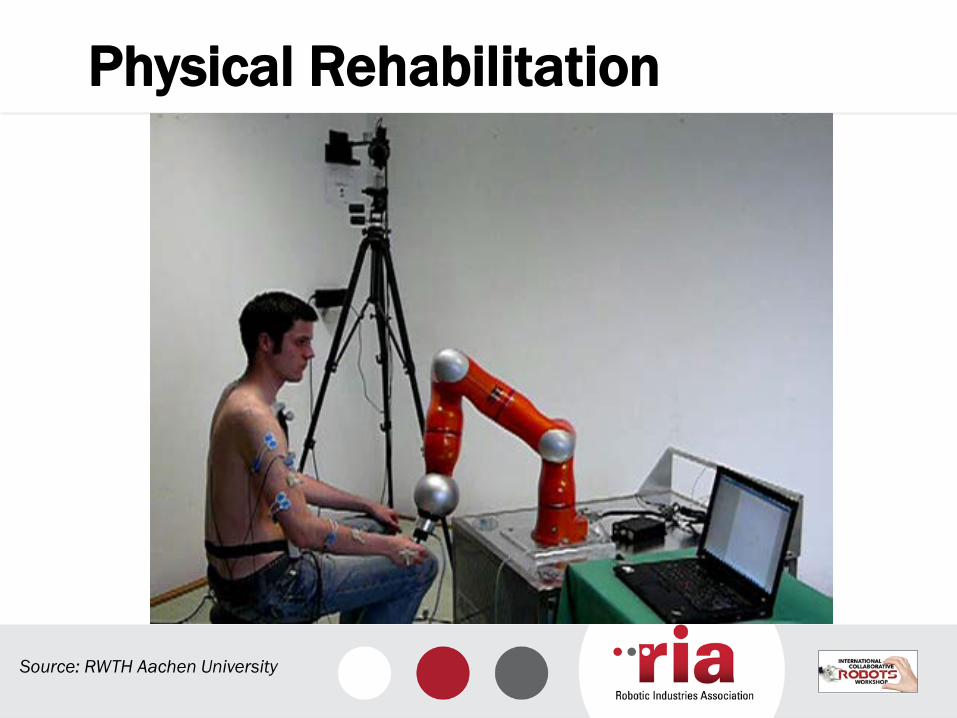
Physical Rehabilitation
Source: RWTH Aachen University

TV News – Camera & Teleprompter
Source: CineTV (Automatica 2014)
www.youtube.com/watch?v=JvsfjPXFfxg
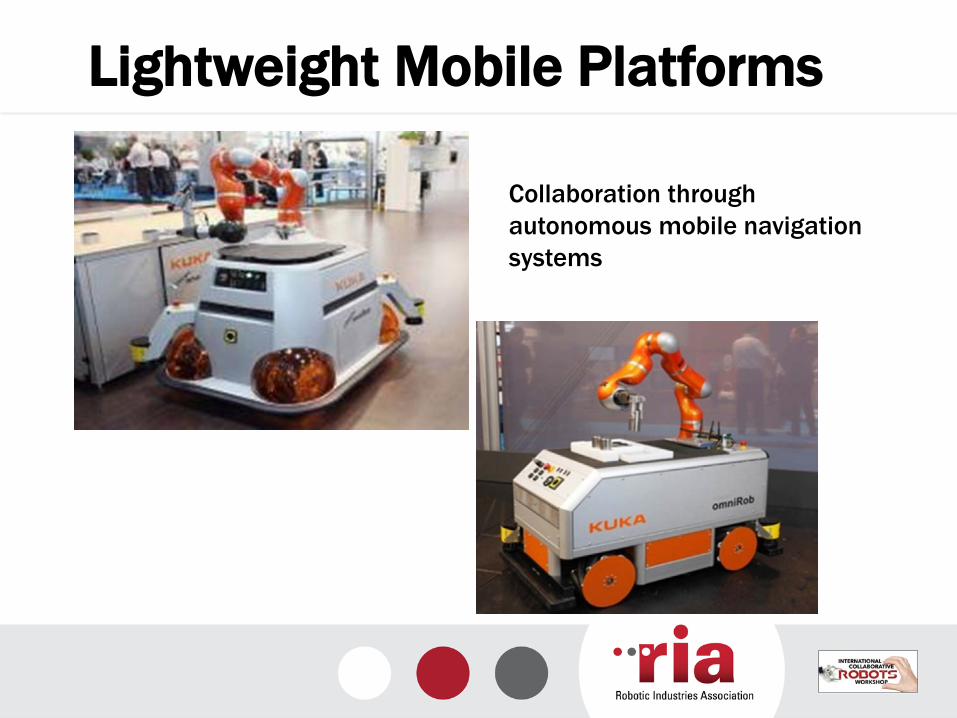
Lightweight Mobile Platforms
Collaboration through autonomous mobile navigation systems

Video - Mobile Navigation
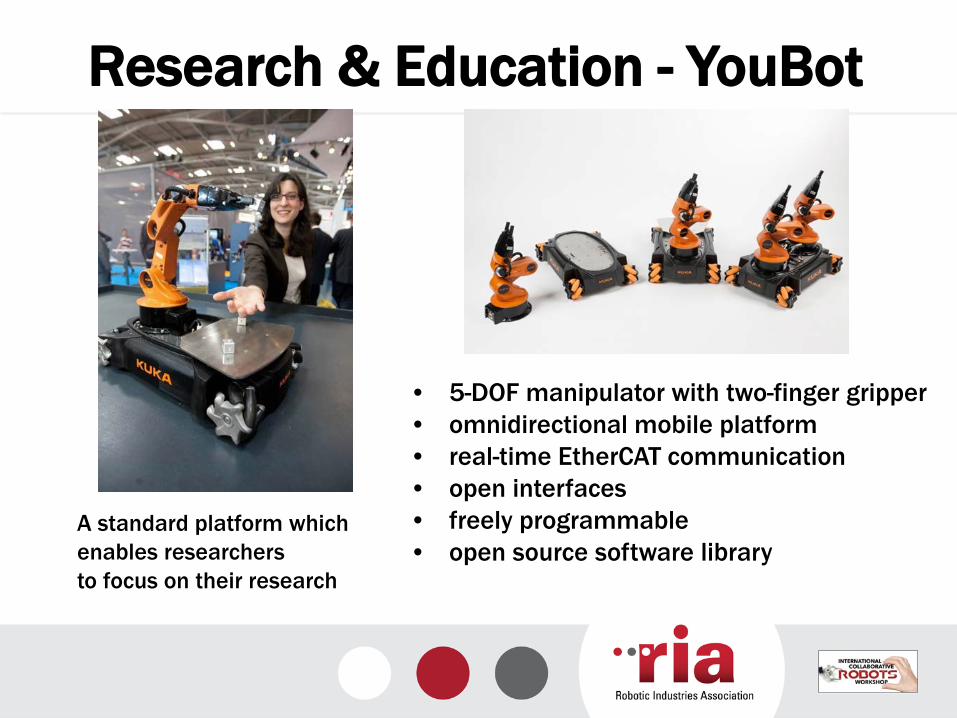
Research & Education - YouBot
• 5-DOF manipulator with two-finger gripper • omnidirectional mobile platform • real-time EtherCAT communication • open interfaces • freely programmable • open source software library
A standard platform which enables researchers to focus on their research
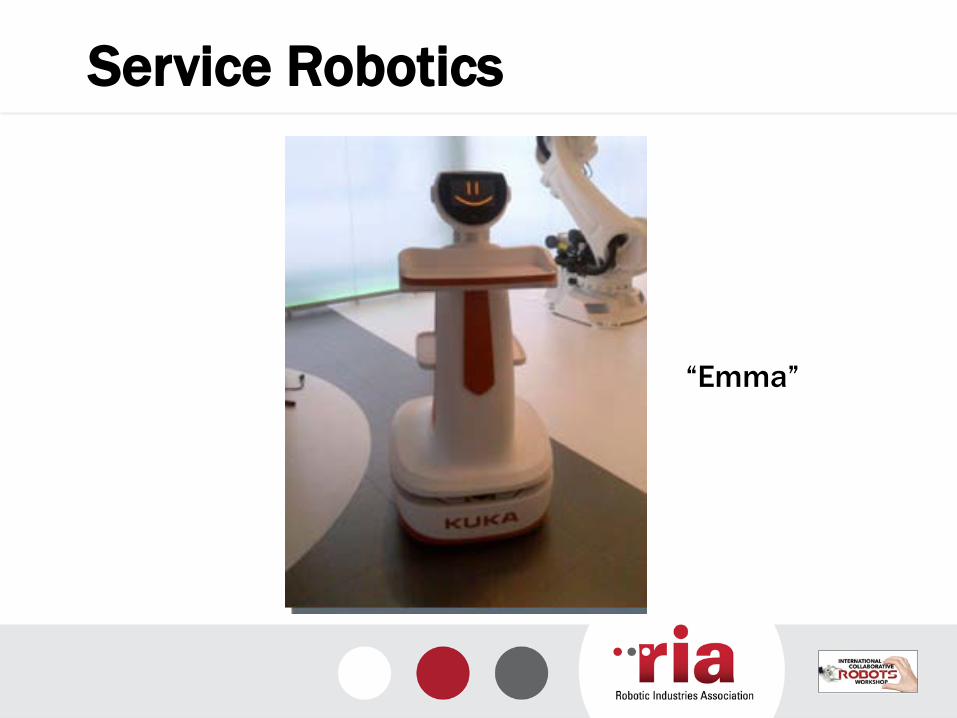
Service Robotics
“Emma”
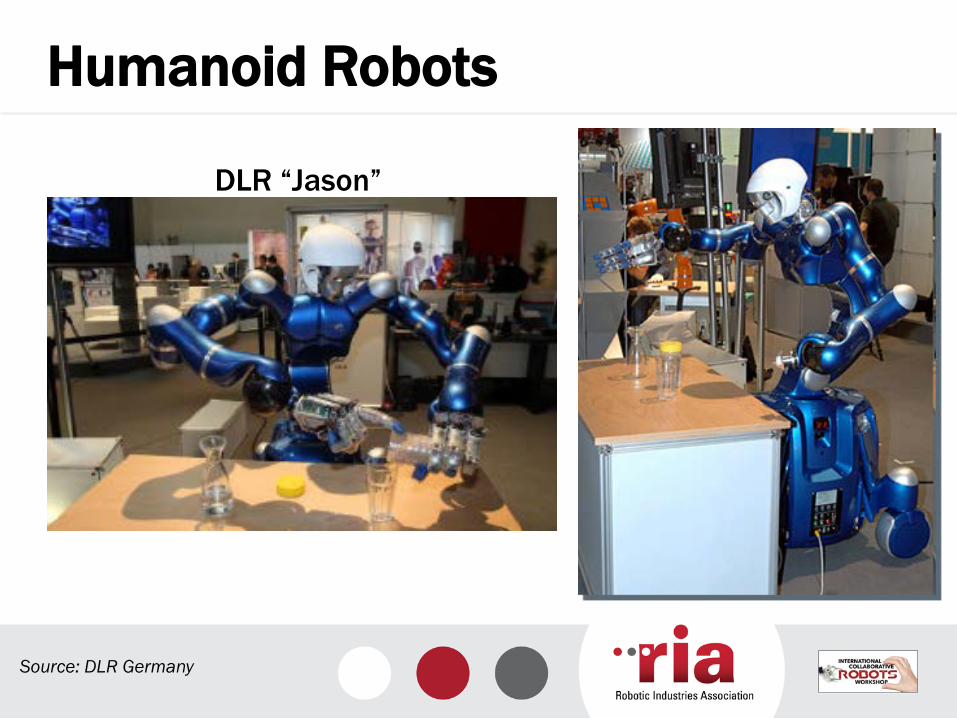
Humanoid Robots
Source: DLR Germany
DLR “Jason”
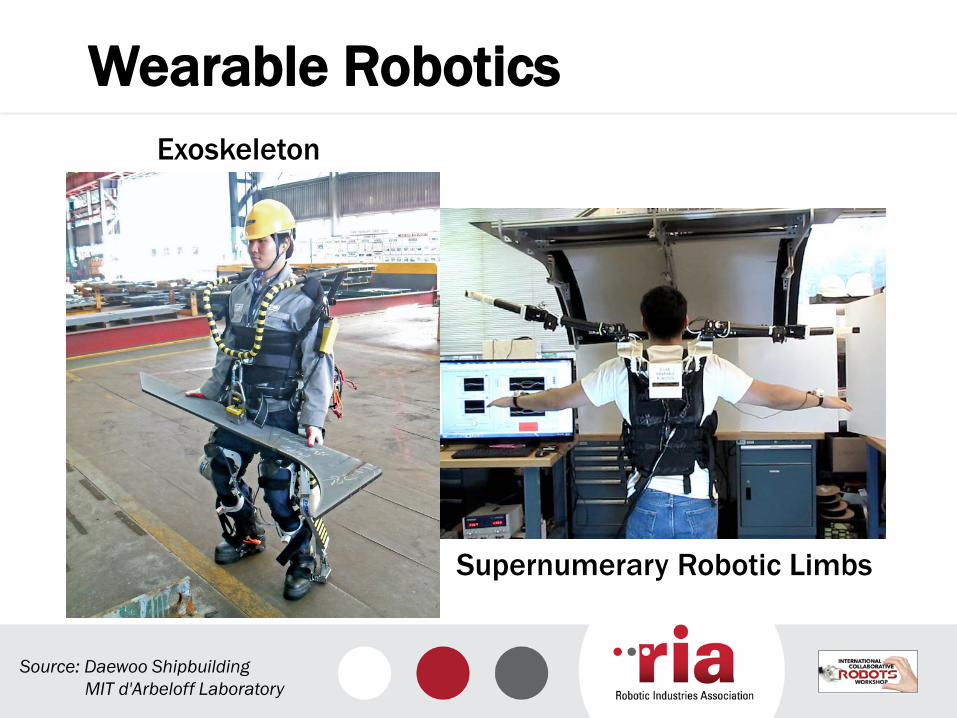
Wearable Robotics
Supernumerary Robotic Limbs
Exoskeleton
Source: Daewoo Shipbuilding MIT d'Arbeloff Laboratory
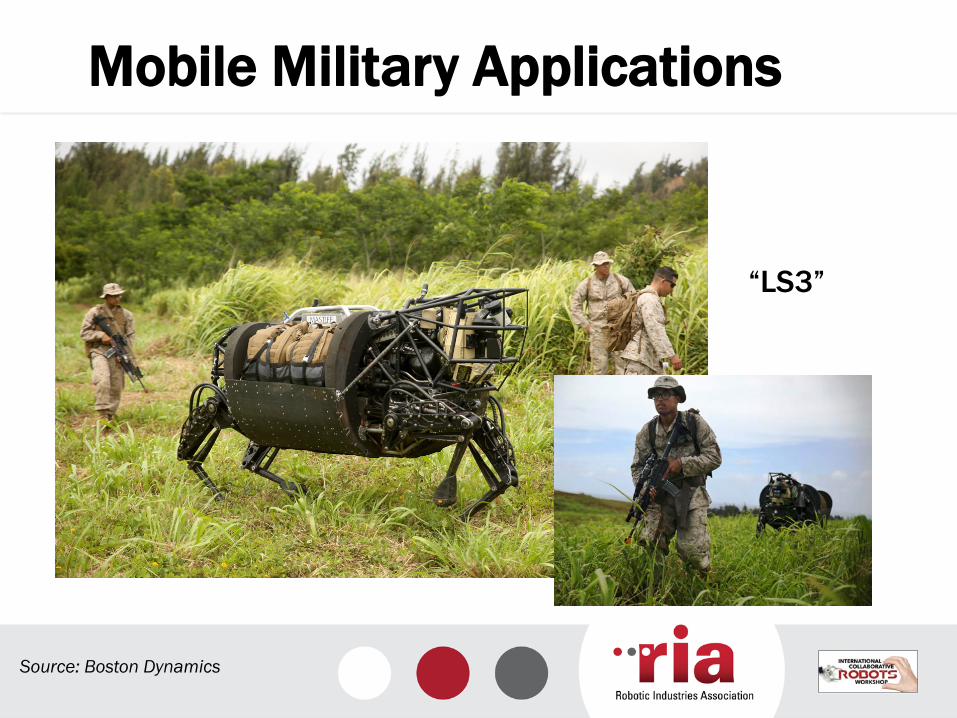
Mobile Military Applications
Source: Boston Dynamics
“LS3”
Safety References Current Robot Safety Standards:
• ISO 10218 Part 1 & Part 2 (2011)
• ANSI/RIA R15.06 2012 Additional Reference:
• VDMA position-paper “Safety in Human-Robot Collaboration” (http://rua.vdma.org/en/article/-/articleview/4217015)
Conclusion
• No human-robot collaboration application should be implemented without completing a risk assessment.
• The overall application and system must always be considered, not only the robot (i.e. process, part -holding, tool or gripper, etc.)
• Risk Assessment = Safety!


Contact Information
Mike Beaupre Director, New Market Sales KUKA Robotics Corporation 22500 Key Drive Clinton Township, MI 48036 USA 586-465-8847 [email protected] www.kukarobotics.com