Embed Size (px)
Citation preview
________________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LUIS GUILHERME MONICI DE BENIGNI
RAFAEL RODRIGO SILVA OLIVEIRA
MISTURADOR MECATRÔNICO DE BAIXO CUSTO PARA PRODUTOS
QUÍMICOS
GARÇA
2017
________________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LUIS GUILHERME MONICI DE BENIGNI
RAFAEL RODRIGO SILVA OLIVEIRA
MISTURADOR MECATRÔNICO DE BAIXO CUSTO PARA PRODUTOS
QUÍMICOS
Artigo Científico apresentado à Faculdade de
Tecnologia de Garça – FATEC, como requisito
parcial para a conclusão do Curso de Tecnologia
em Mecatrônica Industrial, examinado pela
seguinte comissão de professores:
Data da Aprovação:
________________________________
Prof. Esp. Adalberto Sanches Munaro
FATEC Garça
________________________________
Prof. (a) (membro da banca)
FATEC Garça
________________________________
Prof. (a) (membro da banca)
FATEC Garça
GARÇA
2017

MISTURADOR MECATRÔNICO DE BAIXO CUSTO PARA PRODUTOS
QUÍMICOS
Luis Guilherme Monici de Benigni
Rafael Rodrigo Silva Oliveira [email protected]¹
Profº Esp.: Adalberto Sanches Munaro²
Resumo – O ramo químico, representado tanto pela indústria quanto pelo comércio, é
conhecido por apresentar uma quantidade significativa de fatores e situações de risco,
podendo causar danos principalmente à saúde dos trabalhadores envolvidos na sua produção e
transporte. Tratando-se de um setor produtivo rentável e cotidiano, surge a necessidade de
adequar o processo produtivo a medidas de segurança diversas. Dentre estas medidas, uma é a
de automatizar a produção, diminuindo a necessidade do manuseio humano dos produtos
químicos. Este projeto tem como objetivo o desenvolvimento de um protótipo de misturador
mecatrônico para produtos químicos, de modo a automatizar a produção por um custo
acessível ao usuário. Para isso, o protótipo desenvolvido buscou utilizar os princípios
mecatrônicos para implementar a segurança e facilidade de uso do sistema, tornando-o
acessível e prático de ser montado e operado. Foram realizados testes que comprovam a
eficiência e precisão do protótipo, em que se obtiveram os resultados almejados inicialmente.
Palavras-chave: Produtos Químicos. Automatização. Custo Acessível. Tecnologia.
Abstract - The chemical industry, represented by both industry and commerce, is known to
present a significant amount of risk factors and situations, and can cause damages mainly to
the health of workers involved in their production and transportation. Being a profitable and
everyday productive sector, the need arises to adapt the productive process to diverse security
measures. Among these measures, one is to automate production, reducing the need for
human handling of chemicals. This project aims to develop a prototype mechatronics mixer
for chemicals, in order to automate production at an affordable cost to the user. For this, the
developed prototype sought to use the mechatronic principles to implement the safety and
ease of use of the system, making it accessible and practical to be assembled and operated.
Tests were carried out to prove the efficiency and accuracy of the prototype, in which the
initial results were obtained.
Keywords: Chemicals. Automation. Affordable Cost. Technology.
1 Alunos do Curso de Tecnologia em Mecatrônica Industrial- Fatec-Garça.
² Docente do Curso de Tecnologia em Mecatrônica Industrial- Fatec-Garça
1
1. INTRODUÇÃO
A indústria química está direta ou indiretamente relacionada a variados setores da
economia, fornecendo soluções e melhorias da qualidade de produtos para agricultura, setor
de transportes, mineração, construção civil, embalagens, segmentos de serviços, entre outros.
Atrelado a isso, está o impacto gerado pelas atividades destes setores no meio ambiente, visto
que atualmente o mundo lida com esta problemática em relação às questões ambientais.
Em relação à contribuição às atividades econômicas – disponibilizando capital,
conhecimento científico e recursos humanos – a seu potencial de geração de renda e de postos
de trabalho qualificado e a sua influência nas questões de sustentabilidade tornaram a
indústria química um setor estratégico para o desenvolvimento econômico do país.
De acordo com a Associação Brasileira da Indústria Química (ABIQUIM, 2010), o
crescimento do setor químico tem sido mais intenso do que o da economia como um todo, o
que corrobora a importância deste setor na perspectiva de crescimento da economia brasileira.
No entanto, a materialização destas perspectivas de investimentos depende do tratamento
dado às distorções responsáveis por retirar a competitividade das empresas.
Este artigo apresenta uma proposta de superação dos obstáculos ao desenvolvimento do
setor químico tanto a nível residencial e comercial quanto industrial, por meio da inserção de
inovações tecnológicas na preparação de produtos químicos. A proposta apoia-se na
elaboração de um protótipo de misturador de baixo custo e sustentável, de modo a auxiliar na
eficiência produtiva de produtos químicos.
O misturador projetado para este trabalho exemplificará o processo de fabricação
automatizado mecatrônicamente de sabão caseiro em barra, que é formulado a partir de óleo
vegetal reutilizado e hidróxido de sódio (soda líquida). Embora atualmente a fabricação do
sabão líquido tenha se popularizado, tornando-se mais rápido e prático para a nível industrial,
o sabão em barra continua sendo um grande aliado nas limpezas rotineiras de
estabelecimentos residenciais e comerciais, uma vez que une a versatilidade de uso (sólido
e/ou diluido em água para formar pasta), a durabilidade e a facilidade de armazenamento,
além de ser sustentável e altamente eficaz na limpeza de louças, roupas e sujidades mais
pesadas, devido ao emprego da soda líquida em sua composição.
Desta forma, consegue-se um produto de limpeza de muito boa qualidade, amplamente
utilizado pela sociedade, com um custo acessível e um forte apelo sustentável, o que cria uma
imagem positiva do produto. Além disso, ele pode pagar-se e retornar um lucro considerável
em curto prazo se instalado em ONGs, associações, instituições, escolas, dentre outros locais.

2
De acordo com Rosário (2009), diversas empresas nacionais possuem uma limitada
capacidade tecnológica, uma vez que enfatizam a reprodução de produtos já existentes sem
embutir inovações tecnológicas e sem se preocupar com o meio ambiente.
Além disso, o contato com produtos químicos é demasiado nocivo à saúde humana, sendo
de grande interesse do setor químico a redução de riscos de acidentes com funcionários do
processo produtivo. Sendo assim, a automação do processo de produção pode minimizar ou
resolver estes riscos. Logo, o presente estudo se pauta na importância de promover a
automatização do processo produtivo. Aliado a isto, soma-se o fato de o projeto visar o menor
custo possível de aplicação, demandando poucas peças, materiais reaproveitados e
sustentáveis e um simplificado sistema operacional, estando assim ao alcance do usuário
comum, seja ele comercial ou mesmo residencial, podendo também passar por um simples
redimensionamento e ser instalado até mesmo em nível indústrial.
Com o desenvolvimento do protótipo é possível reduzir o contato do operador com os
agentes químicos em quase sua totalidade, melhorar a eficiência e riscos inerentes ao
processo. Com a implantação do processo mecatrônico de mistura, aliamos ainda o conforto
físico e a garantia da saúde, já que não será necessário realizar movimentos repetitivos de
mistura e agitação durante longos períodos, o que causaria um problema físico como uma
Lesão por Esforço Repetitivo (L.E.R.) pela execução da atividade a longo prazo. Aliado a isso
minimizamos os desperdícios, asseguramos a qualidade do produto, e desta maneira
reduzimos os custos e ampliamos o lucro final.
2. DESENVOLVIMENTO
Nesta etapa serão definidos os conceitos de automação e mecatrônica, bem como os
processos, equipamentos e tecnologias utilizados no desenvolvimento do protótipo, os testes
realizados com o protótipo e a análise dos resultados.
2.1 REFERENCIAL TEÓRICO
Como referencial para a compreensão e análise do projeto, deve-se ter em mente os
seguintes conceitos:
3
2.1.1 Automação
Automação é um sistema que utiliza técnicas computadorizadas com o intuito de otimizar
o meio sobre o qual atuam, a partir de informações recebidas deste meio, reparando
incorreções existentes na saída do sistema, de modo a dinamizar os processos produtivos
(SILVEIRA; SANTOS, 2002).
Além disso, a automatização proporcionou também maior flexibilidade de modelos, maior
segurança no trabalho para os operários, menores perdas de materiais, melhor planejamento e
controle do processo produtivo. De forma complementar esta qualidade na informação, a
automação abrange ainda a inserção de sistemas interligados, representados pelas interfaces
homem-máquina (IHM) e os sistemas supervisórios (MORAES, 2013).
2.1.2 Mecatrônica e processos
A mecatrônica é, segundo Barbalho (2006), a transferência da complexidade do sistema
mecânico para a eletrônica ou o software através da realimentação elétrica do sistema
mecânico. Com o controle eletrônico, ocorre melhoras na precisão, capacidade de
implementações e no tempo de resposta.
Nas operações de processo há o controle sequencial, que é constituído por um circuito
elétrico composto de elementos (chaves e relés) conectados de acordo com o propósito de
processo. A eficiência é aumentada usando sistemas microprocessados programáveis, além de
outros periféricos inerentes ao funcionamento. Também são utilizados sensores (elementos
capazes de produzir um sinal como resposta a determinada grandeza física mensurável) e
atuadores (elementos que realizam uma ação oriunda de outro dispositivo de comando).
2.1.3 Mistura
O processo de mistura e preparação de líquidos químicos tem sua representatividade em
diversas áreas do nosso cotidiano, desde produtos destinados à saúde, limpeza residencial,
comercial e industrial até ácidos e produtos mais complexos destinados a produção de algum
terceiro produto. Um típico sistema de preparação de agentes químicos líquidos funciona a
partir da entrada das matérias primas no reservatório de agitação (tanque agitado) com
dosagem por meio de bocais apropriados (sistema dosador), realizando a agitação e após
terminado o processo ocorre a disponibilização do produto químico para uso ou embalagem.
4
O processo de mistura fundamenta-se no princípio de duas ou ainda mais fases que
inicialmente estão separadas, onde serão aleatoriamente movimentadas e distribuídas uma
através da outra (UFSC, 2017).
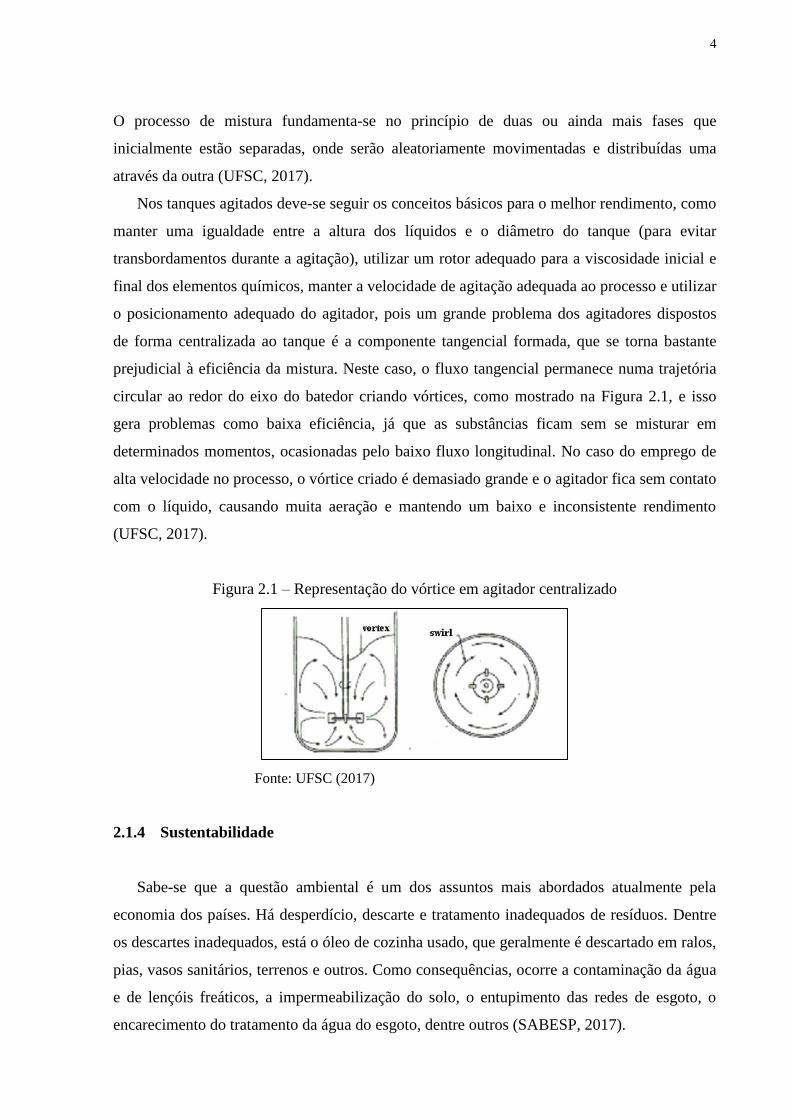
Nos tanques agitados deve-se seguir os conceitos básicos para o melhor rendimento, como
manter uma igualdade entre a altura dos líquidos e o diâmetro do tanque (para evitar
transbordamentos durante a agitação), utilizar um rotor adequado para a viscosidade inicial e
final dos elementos químicos, manter a velocidade de agitação adequada ao processo e utilizar
o posicionamento adequado do agitador, pois um grande problema dos agitadores dispostos
de forma centralizada ao tanque é a componente tangencial formada, que se torna bastante
prejudicial à eficiência da mistura. Neste caso, o fluxo tangencial permanece numa trajetória
circular ao redor do eixo do batedor criando vórtices, como mostrado na Figura 2.1, e isso
gera problemas como baixa eficiência, já que as substâncias ficam sem se misturar em
determinados momentos, ocasionadas pelo baixo fluxo longitudinal. No caso do emprego de
alta velocidade no processo, o vórtice criado é demasiado grande e o agitador fica sem contato
com o líquido, causando muita aeração e mantendo um baixo e inconsistente rendimento
(UFSC, 2017).
Figura 2.1 – Representação do vórtice em agitador centralizado
Fonte: UFSC (2017)
2.1.4 Sustentabilidade
Sabe-se que a questão ambiental é um dos assuntos mais abordados atualmente pela
economia dos países. Há desperdício, descarte e tratamento inadequados de resíduos. Dentre
os descartes inadequados, está o óleo de cozinha usado, que geralmente é descartado em ralos,
pias, vasos sanitários, terrenos e outros. Como consequências, ocorre a contaminação da água
e de lençóis freáticos, a impermeabilização do solo, o entupimento das redes de esgoto, o
encarecimento do tratamento da água do esgoto, dentre outros (SABESP, 2017).
5
Uma alternativa simples para diminuir o descarte de óleo usado é reaproveitá-lo,
transformando o óleo em sabão. Essa é uma opção de baixo custo, que pode gerar renda com a
comercialização do sabão, além de ser uma opção benéfica para a natureza, pois o sabão, ao
contrário do óleo, é um produto biodegradável (ZAGO NETO; PINO, 1997).
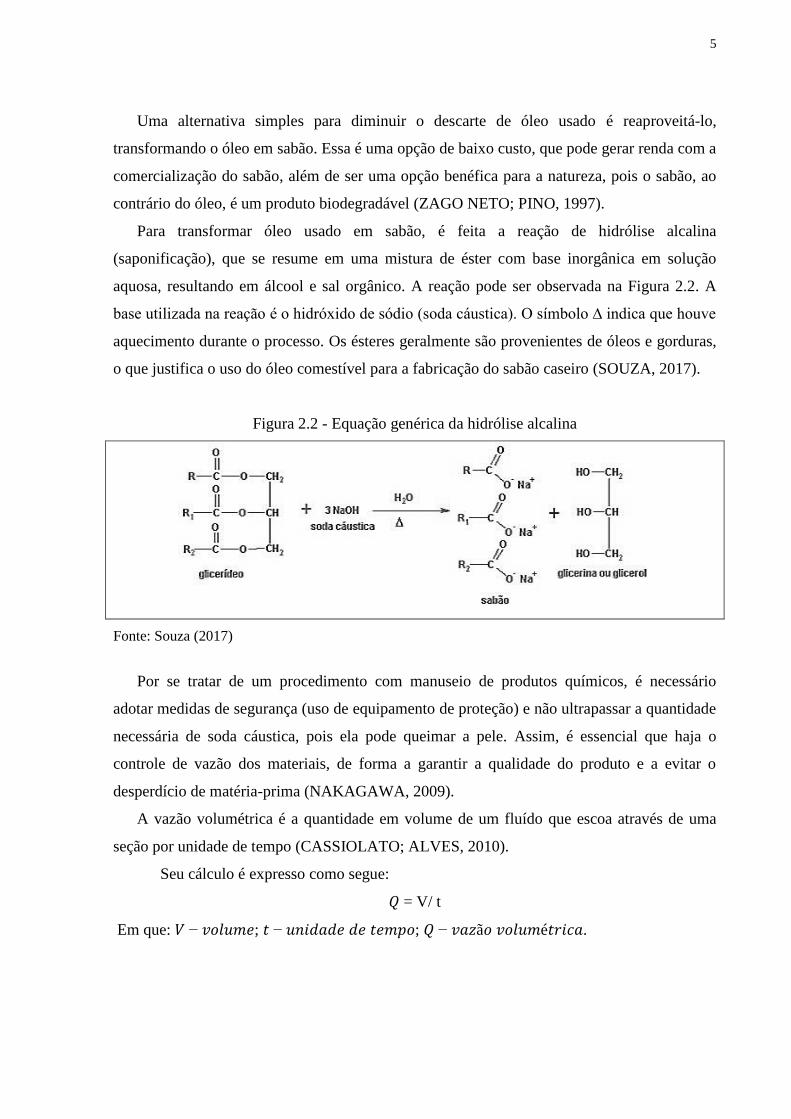
Para transformar óleo usado em sabão, é feita a reação de hidrólise alcalina
(saponificação), que se resume em uma mistura de éster com base inorgânica em solução
aquosa, resultando em álcool e sal orgânico. A reação pode ser observada na Figura 2.2. A
base utilizada na reação é o hidróxido de sódio (soda cáustica). O símbolo ∆ indica que houve
aquecimento durante o processo. Os ésteres geralmente são provenientes de óleos e gorduras,
o que justifica o uso do óleo comestível para a fabricação do sabão caseiro (SOUZA, 2017).
Figura 2.2 - Equação genérica da hidrólise alcalina
Fonte: Souza (2017)
Por se tratar de um procedimento com manuseio de produtos químicos, é necessário
adotar medidas de segurança (uso de equipamento de proteção) e não ultrapassar a quantidade
necessária de soda cáustica, pois ela pode queimar a pele. Assim, é essencial que haja o
controle de vazão dos materiais, de forma a garantir a qualidade do produto e a evitar o
desperdício de matéria-prima (NAKAGAWA, 2009).
A vazão volumétrica é a quantidade em volume de um fluído que escoa através de uma
seção por unidade de tempo (CASSIOLATO; ALVES, 2010).
Seu cálculo é expresso como segue:
𝑄 = V/ t
Em que: 𝑉 − 𝑣𝑜𝑙𝑢𝑚𝑒; 𝑡 − 𝑢𝑛𝑖𝑑𝑎𝑑𝑒 𝑑𝑒 𝑡𝑒𝑚𝑝𝑜; 𝑄 − 𝑣𝑎𝑧ã𝑜 𝑣𝑜𝑙𝑢𝑚é𝑡𝑟𝑖𝑐𝑎.
6
2.2 PROCEDIMENTOS METODOLÓGICOS
O projeto pode ser caracterizado como também um estudo de caso, já que se tem o
interesse em aplicá-lo a uma situação singular e particular. Sua natureza é qualitativo-
quantitativa, pois a pesquisa qualitativa tem a função de justificar, através de uma análise, os
resultados determinados na pesquisa quantitativa. Inicialmente, foi realizada uma pesquisa
bibliográfica de conceitos da área mecatrônica a fim de proporcionar um embasamento
melhor acerca do processo de controle, de sua lógica e implementação na montagem do
protótipo.
Para melhor compreensão do método, o projeto foi dividido em duas etapas, sendo elas:
(1) Programação e montagem do protótipo e (2) Testes.
2.2.1 Materiais
O projeto visou à construção de um protótipo-exemplo em escala funcional de um
misturador mecatrônico para produção de sabão a base de hidróxido de sódio. A aparelhagem
necessária para a realização do experimento foi:
a) 01 Placa microprocessada Raspberry PI 3;
b) 01 Placa de interface de potência via relês e acopladores ópticos;
c) 01 Fonte de alimentação 450w com saídas 12v, 3.3v e 5v DC e 127 ou 220v AC;
d) 02 Recipientes com capacidade de 12 litros;
e) 01 Recipiente com capacidade de 50 litros;
f) 01 Batedor mecânico com perfil circular, de 190 mm de diâmetro com 6 ressaltos
dispostos igualmente entre sí;
g) 01 Motor WEG de ¼ de CV, 1540 RPM, capacitor permanente;
h) 01 Conjunto polias e correia;
i) 02 Válvula solenoide 127v, 10w, ¾” de diâmetro de entrada, saída de ½” de diâmetro;
j) 02 Eletrobomba 127v, 30w, ¾” de diâmetro de entrada e saída;
k) 01 Válvula de esfera com diâmetro de ¾”;
l) 02 Sensor tipo boia;
m) Interface Homem-Máquina (IHM): composta de monitor, mouse e teclado;
n) Óleo vegetal usado;
o) Hidróxido de sódio (mais conhecido como soda cáustica);
7
p) Tubulação de PVC e demais acessórios inerente ao mesmo (curvas, niples, cola PVC,
etc).
O equipamento foi controlado por um microprocessador Raspberry PI 3, devido a sua
eficiência, inovação, segurança de controle do processo, e facilidade de programação. Foram
ligados ao microprocessador todos os componentes do protótipo, para que fosse feito o
controle dos atuadores, sensores, controles e IHM, certificando-se de que tudo funcione em
conformidade com o que foi programado e desenvolvido. Foi utilizada a linguagem de
programação JAVA, desenvolvida nos anos 1990, buscando maior facilidade de programação
por ser orientada a objetos, com o mesmo teor técnico que as linguagens de mais baixo nível,
o que proporcionou grande agilidade de desenvolvimento, praticidade de execução de tarefas
e uma interface amigável e intuitiva. A placa Raspberry PI 3 está ilustrada na Figura 2.3 e
possui as seguintes especificações:
Processador Broadcom BCM2837
64bit ARMv8 Cortex-A53 Quad-
Core;
Clock 1.2 GHz;
Memória RAM: 1GB;
Adaptador Wifi 802.11n integrado;
Bluetooth 4.1 BLE integrado;
Conector de vídeo HDMI;
4 portas USB 2.0;
Conector Ethernet;
Interface para câmera (CSI);
Interface para display (DSI);
Slot para cartão microsSD;
Conector de áudio e vídeo;
IO de 40 pinos;
Dimensões: 85 x 56 x 17mm.
Figura 2.3 - Placa Raspberry PI 3
Fonte: Filipeflop (2017)
8
Como parte do sistema de dosagem de matérias primas, utilizamos 2 eletrobombas de
127v, 30w para a pressurização(uma para cada reservatório) e como controlador de vazão
foram utilizados dois solenoides de 127v, 10w. Ainda no sistema de controle de fluídos,
temos um sensor de nível tipo boia instalado inferiormente em cada reservatório de matéria
prima, onde caso o mesmo detecte nível baixo, impede o processo de prosseguir.
A fonte de alimentação que utilizamos possui saídas de 3.3v, 5,0v e 12v em corrente
contínua e 127v ou 220v em corrente alternada, o que tornou muito prática a montagem de
todo o projeto, pois permitiu em somente uma fonte alimentar todos os componentes, no caso
da placa micro processada e de sua respectiva interface de potência utilizamos 5,0v para
alimentação e para o motor do batedor, solenoides e bomba e uma interface homem
máquina(I.H.M.) 127v.
O sistema móvel do batedor que foi utilizado é composto por um motor WEG de 1/4cv,
1.540 rpm, 127v monofásico com capacitor permanente, um eixo de agitação com pá de 6
ressaltos e 190mm de diâmetro e sistema de transmissão por polias e correia, com polia
motora de 62 mm e movida de 192 mm, resultando em uma relação de transmissão que
possibilita uma redução de 3:1(1 volta da polia movida para 3 da polia motora,
aproximadamente) e desta forma mantemos a velocidade adequada ao uso do protótipo.
O custo para a construção e implementação do protótipo foi de R$ 394,00 excluindo-
se equipamentos para a IHM como monitor, mouse e teclado, pois foram utilizados
reutilizados provenientes de antigos computadores, porém seu custo ainda sim é muito
acessível no mercado, onde foram encontrados produtos similares na faixa de R$ 70,00,
usados e em perfeito estado, excelentes para esta aplicação.
2.2.2 Programação e montagem do protótipo
Inicialmente, alocou-se 01 tanque de 50 litros, utilizado como tanque agitado, em nível
inferior, com o batedor mecânico acoplado a ele inferiormente e deslocado do centro, para
evitar a formação de vórtices prejudiciais a mistura, eliminando a necessidade de
chicanas(barreiras internas para neutralização do vórtice). Em seguida, alocaram-se dois
tanques de 12 litros (utilizados para reserva de matéria-prima - hidróxido de sódio e óleo
vegetal reutilizado) com sensores de nível tipo boia na parte lateral inferior, definindo assim
um nível mínimo para início de processo. Os dois reservatórios de matéria prima foram
instalados a uma altura superior à altura do tanque de mistura, de modo a permitir a ligação
das eletrobombas de líquido e solenoides com suas respectivas tubulações inferiormente e
9
para permitir que o fluxo residual na tubulação das matérias-primas seguisse por gravidade ao
tanque de mistura mesmo após o tempo de abertura da válvula cessar.
Todo o sistema foi então conectado a uma placa microprocessada Raspberry PI3 e a uma
placa de interface de potência composta por relês e acopladores ópticos, para que fosse
controlado eletronicamente durante todo o processo (abertura e fechamento das válvulas
dosadoras, acionamento das bombas, controle de nível mínimo de segurança das matérias
primas e tempo de agitação). O esquema de montagem está ilustrado nas Figuras 2.4 e 2.5.
Figura 2.4 – Esquema de montagem do protótipo
Fonte: Os autores
10
Figura 2.5 – Esquema de alimentação e controle
Fonte: Os autores
Para a troca de informações entre usuário e máquina, o sistema foi interligado a uma IHM
composta por um monitor, mouse e teclado, permitindo o intercâmbio de todas as
informações e parâmetros necessários para a programação do processo. A quantidade de
matérias-primas (hidróxido de sódio líquido e óleo reutilizado) a serem inseridas no tanque e
o tempo de mistura puderam ser definidas de duas formas:
a) Manualmente, por meio dos periféricos de entrada (teclado e mouse);
b) A partir de receitas pré-determinadas, que foram dispostas em caixas de diálogo na
tela do monitor.
O segundo modo de entrada de dados no programa foi adicionado visando simplificar o
processo e permitir uma ciclagem de produção mais rápida, prática e padronizada. Para
realizar o controle de entrada das matérias primas no tanque de mistura, foram utilizadas
válvulas solenóides ligadas em série a bombas, para ocorrer a pressurização necessária para
vencer a força resistente a passagem do fluxo do líquido. Ao serem acionados, liberam a
passagem dos materiais líquidos ao tanque de mistura, com dosagem por temporização via
microprocessador.
Depois de finalizado o processo de mistura, o sabão precisa ser escoado para uma ou mais
fôrmas. Para o escoamento do produto final, devido à viscosidade da mistura ter aumentado
exponencialmente durante o processo de mistura, utilizou-se uma válvula de esfera de 3/4 de
polegada com passagem livre, disposta na parte inferior do tanque. O método manual de
transferência do sabão foi escolhido pelo fato de o produto resultante da mistura não afetar a
11
segurança do operador, uma vez que a periculosidade da soda já teria sido desfeita pelo óleo,
possuindo um PH não agressivo, o que permitiu a saponificação da mistura, transformando-a
em um produto que não agride o operador. Assim, considerou-se a automatização dessa etapa
desnecessária, visto que uma válvula solenoide dessa proporção teria um custo muito acima
do desejado, o que divergiria do foco do projeto.
Depois de escoado, o sabão ficou em descanso, para que passasse pelo processo de cura e
secagem, que tem duração de 48 a 72 horas. Após este tempo, o sabão pode então ser cortado
no tamanho desejado, ficando assim, pronto para utilização.
Figura 2.6 – Protótipo batedor mecatrônico
Fonte: Os autores
2.2.3 Testes
O tempo de abertura das válvulas solenóides utilizadas para a dosagem das matérias
primas vindas da eletrobomba de seus respectivos tanques para o tanque de mistura foi
definido a partir de mensurações práticas em que, primeiramente, analisou-se o tempo que a
matéria prima levava para ser escoada em um minuto, em seguida, calculou-se a
proporcionalidade de tempo e calibrou-se o sistema para que ele trabalhasse de acordo com as
quantidades programadas, considerando uma margem de erro de 5%, que não é prejudicial ao
processo em questão. As vazões utilizadas constam na Tabela 2.1.
12
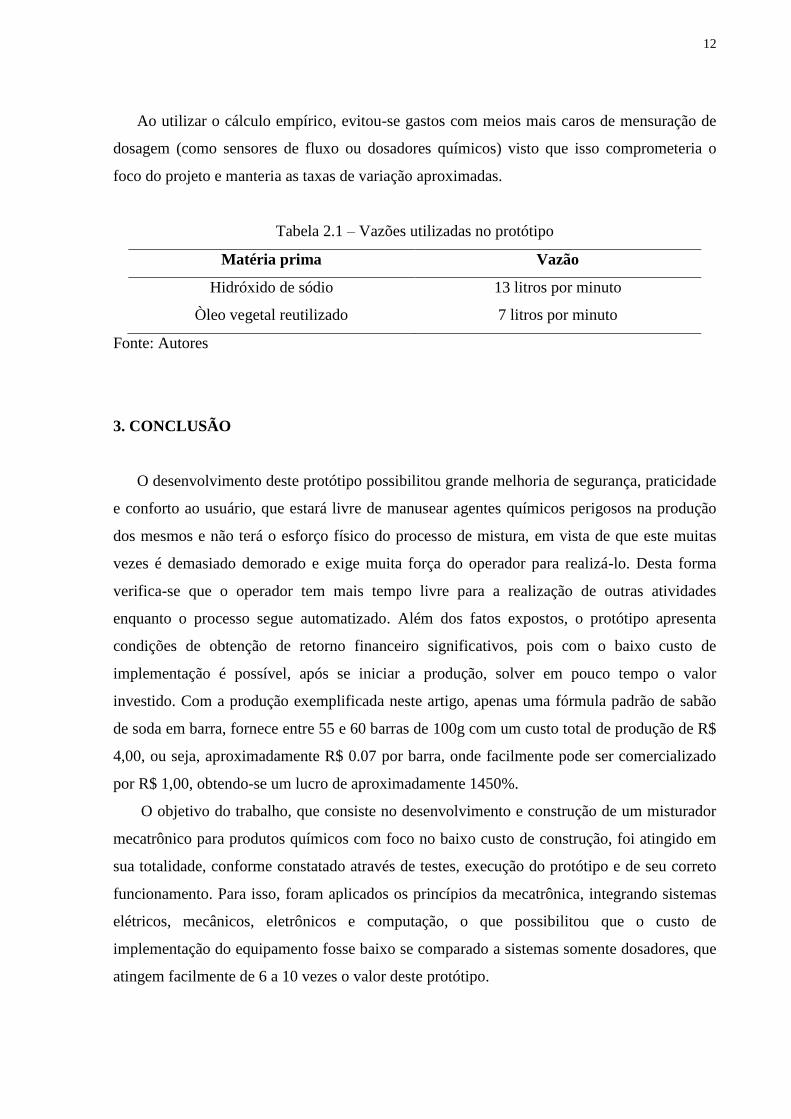
Ao utilizar o cálculo empírico, evitou-se gastos com meios mais caros de mensuração de
dosagem (como sensores de fluxo ou dosadores químicos) visto que isso comprometeria o
foco do projeto e manteria as taxas de variação aproximadas.
Tabela 2.1 – Vazões utilizadas no protótipo
Matéria prima Vazão
Hidróxido de sódio 13 litros por minuto
Òleo vegetal reutilizado 7 litros por minuto
Fonte: Autores
3. CONCLUSÃO
O desenvolvimento deste protótipo possibilitou grande melhoria de segurança, praticidade
e conforto ao usuário, que estará livre de manusear agentes químicos perigosos na produção
dos mesmos e não terá o esforço físico do processo de mistura, em vista de que este muitas
vezes é demasiado demorado e exige muita força do operador para realizá-lo. Desta forma
verifica-se que o operador tem mais tempo livre para a realização de outras atividades
enquanto o processo segue automatizado. Além dos fatos expostos, o protótipo apresenta
condições de obtenção de retorno financeiro significativos, pois com o baixo custo de
implementação é possível, após se iniciar a produção, solver em pouco tempo o valor
investido. Com a produção exemplificada neste artigo, apenas uma fórmula padrão de sabão
de soda em barra, fornece entre 55 e 60 barras de 100g com um custo total de produção de R$
4,00, ou seja, aproximadamente R$ 0.07 por barra, onde facilmente pode ser comercializado
por R$ 1,00, obtendo-se um lucro de aproximadamente 1450%.
O objetivo do trabalho, que consiste no desenvolvimento e construção de um misturador
mecatrônico para produtos químicos com foco no baixo custo de construção, foi atingido em
sua totalidade, conforme constatado através de testes, execução do protótipo e de seu correto
funcionamento. Para isso, foram aplicados os princípios da mecatrônica, integrando sistemas
elétricos, mecânicos, eletrônicos e computação, o que possibilitou que o custo de
implementação do equipamento fosse baixo se comparado a sistemas somente dosadores, que
atingem facilmente de 6 a 10 vezes o valor deste protótipo.
13
REFERÊNCIAS
ABIQUIM. Pacto nacional da indústria química. Associação Brasileira da Indústria
Química. São Paulo, 2010, 40p.
BARBALHO, S. C. M. Modelo de referência para o desenvolvimento de produtos
mecatrônicos: proposta e aplicações. 2006. 257 f. Tese (Doutorado do Curso de Engenharia
Mecânica) - Escola de Engenharia de São Carlos, Universidade de São Paulo, São Carlos,
2006.
CASSIOLATO, C; ALVES, E O. Medição de vazão. 2010. Série artigos técnicos Smar
Equipamentos Industriais Ltda. Disponível em:
<http://www.smar.com/newsletter/marketing/index40.html>. Acesso em: 08 maio 2017.
UFSC. Agitação e mistura. Material de aula. Disponível em: <
https://moodle.ufsc.br/pluginfile.php/772359/mod_resource/content/0/Agitacao_Mistura.pdf>
. Acesso em: 08 maio 2017.
FILIPEFLOP. Raspberry Pi 3 Model B. Disponível em: <http://www.filipeflop.com/pd-
31a472-raspberry-pi-3-model-b.html>. Acesso em: 04 abri. 2017.
MORAES, C. C.; CASTRUCCI, P. L. Engenharia de automação industrial. 2. ed. Rio de
Janeiro: LTC, 2013. 347 p.
NAKAGAWA, H. R. T. Controle de vazão de líquido utilizando software de
programação de CLP. 2009. 50 f. Tese (Doutorado - Curso de Engenharia de Controle e
Automação) - Universidade Federal de Ouro Preto, Ouro Preto, 2009.
ROSÁRIO, J. M. Automação industrial. São Paulo: Baraúna, 2009. 515 p.
SABESP. Programa de reciclagem de óleo de fritura da Sabesp. 2007. 16f. Disponível
em:<http://site.sabesp.com.br/uploads/file/asabesp_doctos/programa_reciclagem_oleo_compl
eto.pdf>. Acesso em: 08 maio 2017.
SILVEIRA, P. R.; SANTOS, W. E. Automação e controle discreto. 9ª edição. São Paulo:
Erica, 2002.
SOUZA, L. A. Reação de saponificação. Mundo educação. Disponível em:
<http://mundoeducacao.bol.uol.com.br/quimica/reacao-saponificacao.htm>. Acesso em: 12
maio 2017.
ZAGO NETO, O. G.; PINO, J. C. D. Trabalhando a química dos sabões e detergentes.
Universidade Federal do Rio Grande do Sul, 1997. 72p.





























