Embed Size (px)
Citation preview
12zi D r e y f u s , Das Yektordiagramm auf experimenteller Basis. Archly flit Elektrotechnik.
d) D e r E i n f l u B der K a p a z i t ~ i t de r H a u p t l e i t u n g e n .
Es eriibrigt noch diesen EinfluB zu beriicksichtigen, der sich darin iiul3ert, d ab J1 und J'~ sowohl nach Gr6Be wie nach Phase auch im gesunden Zustande der Hauptleitungen verschieden sin& Wit beriicksichtigen, diesen EinfluB derart, dab wir die geometrische Differenz zwischen J1 und J ' l als einen Fehlerstrom J ' l f ansehen, der dann verhiingnisvoll fiir das Schntzsystem wird, wenn J'l~ = J l f wird. Beaehtenswert wird J'!~ erst bei langen Kabel- und bei sehr langen Freileitungen.
Die geometrische Differenz zwischen J1 und J ' l wird also bei KurzschluB nicht un- betr~ichtlich steigen k6nnen, so dab beim EntwurI der Fernleitung die Bedingungen genau formuliert werden mtissen, die ftir die Ausftihrung des Schutzsystems zu stellen sin& Insbesondere darf das Produkt ~ ~ Ilicht beliebig gew~ihlt werden. (s~h~p 1o~.)
Das Vektordiagramm des Ein- und Mehrphasen-Induktionsmotors auf experimenteller Basis.
Vou
Dr.-Ing. Ludwig Dreyfus, Berlin-Niedersch6nhausen.
I n h a l t s i i b e r s i c h t .
I. EinfluB der EisensS~ttigung auf das Kreisdiagramm. II. Auswertung der experimentell ge- wonnenen Unterlagen. III . Die Geraden des empirischen t(reisdiagrammes.
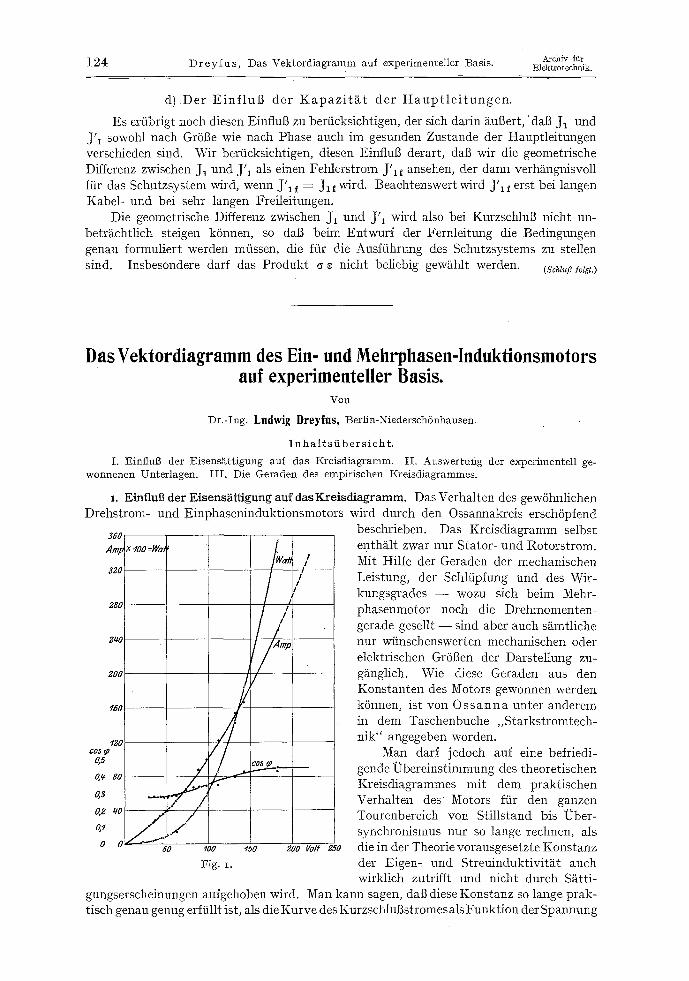
z. Einflug der Eisensgttigung aufdasKreisdiagramm. DasVerhalten des gew6hnlichen Drehstrom- und Einphaseninduktionsmotors wird durch den Ossannakreis ersch6pfend
360
x ~00 =Wa!
280
g00
200
fBO cos
0,5
0,4 8O
0~3 .,
o,z ~o ...,,. i /
o., / . 2 . z 0 0 5O fO0
Fig. T.
9 I
/ /
mp
I I
I I
I
r 200 Vo/? ~50
beschrieben. Das Kreisdiagramm selbst enthiilt zwar nur Stator- und Rotorstrom. Mit Hilfe der Geraden der mechanischen Leistung, der Schltipfung und des Wir- kungsgrades - - wozu sich beim Mehr- phasenmotor noch die Drehmomenten- gerade gesellt - - sind aber auch s~imtliche nur wtinschenswerten mechanischen oder elektrischen Gr6gen der Darstellung zu- g~inglich. Wie diese Geraden aus den Konstanten des Motors gewonnen werden k6nnen, ist yon O s s a n n a unter anderem in dem Taschenbuche ,,Starkstromtech- nik" angegeben worden.
Man darf jedoch auf eine befriedi- gende lJbereinstimmung des theoretischen Kreisdiagrammes mit dem praktischen Verhalten des Motors ftir den ganzen Tourenbereich yon Stillstand bis lJber- synchronismus nut so lange rechnen, als die in der Theorie vorausgesetzte Konstanz der Eigen, und Streuinduktivit~tt auch wirklich zutrifft und nicht durch S~itti-
gungserscheinungen aufgehoben wird. Man kann sagen, dab diese Konstanz so lange prak- tisch genau genug erffillt ist, als die Kurve des Kurzschlul3stromes als Funktion der Spannung
1912. I. Bd. 3. Heft . Drey fus , Das Vektordiagramm auf experimenteller Basis. 125
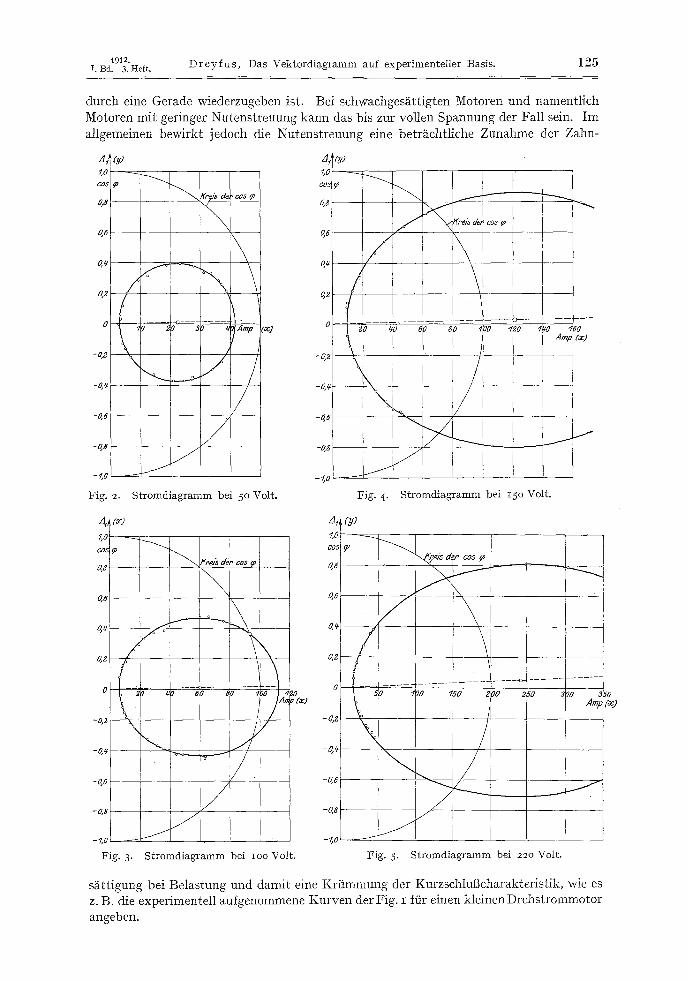
durch eine Gerade wiederzugeben ist. Bei schwachges~tt igten Motoren und nament l ich Motoren mit geringer Nutens t reuung kann das bis zur vollen Spannung der Fall sein. I m allgemeinen bewirkt jedoch die Nutens t reuung eine betr~chtliche Zunahme der Zahn-
0,8 , cos ~ 0,,8
0,6 0,6
0,~ o,,
0,2 0,2
-o,3 / -0,2
- 4 6 ~ -o:
-o,8 ~ -o,8 -:: - : ,0
Fig. 2. Stromdiagramm bei 5 ~ Volt.
:y)
/
\ \
\ \
\ 0 ~P 8 470
/
Fig. 4.
20 q r q Amp (ac)
/
Stromdiagramm bei I5o Volt.
L (ocj
0,8 cos P
_1 r_ . . . . o ~--~ ~---~
-0 ,3
-0,4
-0,6
-0,8
-:,ol Fig. 3.
i
i Y
Stromdiagramm bei Ioo Volt.
d
~0 "; FO g 70
Fig. 5.
r c o s fp
/
"\
2,50 3 70 3 ,4raF (~)
S
Stromdiagramm bei 22o Volt.
s~tt igung bei Belastung und dami t eine Kr t immung der KurzschluBcharakterist ik, wie es z. B. die experimentell aufgenommene Kurven der Fig. I ffir einen kleinen Drehs t rommotor angeben.
1 26 D r e y f u s, Das Vektord iagramm au/ experimenteller Basis. Archly fir Elektrotechnik
In diesem Falle artet der Kreis ftir den Endpunkt des Stromvektors in eine kreis~hnliche Kurve aus, die zwar nach praktischen Messungen (vgl. Fig. 2 bis 5) zwischen doppeltem Synchronismus und Stillstand sehr gut durch eine einfache mathematische Kurve, n~mlich eine Ellipse, wiedergegeben werden kann, in die aber die Geraden des Ossannakreises nach den gebr~uchlichen Methoden nicht mehr eingetragen werden dtirfen.
Damit wtirde das Vektordiagramm in vielen F~illen seine praktische Bedeutung fiber- haupt verlieren, wenn sich nicht wenigstens ftir das eigentliche Arbeitsgebiet der Maschine zwisehen Leerlauf und Maximallast nachweisen lieBe, dab trotz alledem ftir jedes experi- mentell aufgenommene Vektordiagramm die mechanische Leistung, der Wirkungsgrad, das Moment und andere GrSgen noch ebenso gut mit Hilfe von Geraden darstellen lassen wie fiir den strengen Ossannakreis, wenn auch ihre Lage und ihre Mal3stabsfaktoren mit denen des theoretischen Diagrammes nicht mehr i~bereinstimmen.
Diese M6glichkeit beruht auf folgendem Erfahrungssatze, der durch viele Experimente des Verfassers und sicherlich auch anderer hinreichend gesttitzt ist: Bei allen praktisch vorkommenden Eisens~ttigungen l~Bt sich das Vektordiagramm der Induktionsmaschine in ihrem eigentlichen Arbeitsgebiete zwischen Leerlauf und i3berlast durch einen rein empirisch aufzufindenden Kreisbogen interpolieren, der zwar mit dem theoretiseh abzu- leitenden Ossannakreise nichts mehr zn tun hat (dessen Mittelpunkt z. B. ftir den Motor- zustand gewShnlich unterhalb der Abszissenachse liegt und der weder den experimentell aufzunehmenden Stillstandpunkt noch gar den zu berechnenden Unendlichkeitspunkt enth~lt), der aber immerhin die Lage der Aufnahmepunkte mit aller nur wtinschenswerten Ann~iherung wiederzugeben gestattet.
Fflir dieses empirische Kreisdiagramm die Geraden des Ossannakreises zu berechnen und zwar ohne Bentitzung irgendwelcher anderer experimentelter Ergebnisse als eben jener Belastungsaufnahmen, aus welchen das Vektordiargamm gewonnen ist, bildet das Ziel dieser Arbeit. Es liegt in der Nat ur der Sache, dab wir damit dem geschulten Theoretiker wohl nur einen neuen Gesichtspunkt er6ffnen, aber nichts eigentlich neues bieten k6nnen. Datum wendet sich dieser Aufsatz trotz seines theoretischen Gewandes in erster I,inie an den Praktiker, nnd wenn er dazu beitragen sollte, dem Vektordiagramm seinen Weg in die Praxis zu ebnen, so w~re sein Zweck erftillt.
2. Auswertung der experimenteU gewonnenen UnIerlagen. Da die im folgenden zu entwickelnde Theorie bei der Lage der Dinge nichts anderes sein kann als ein KompromiB
80
60
40
20 / 20
0
Fig. 6 .
f
t/0 60 gO
ag~
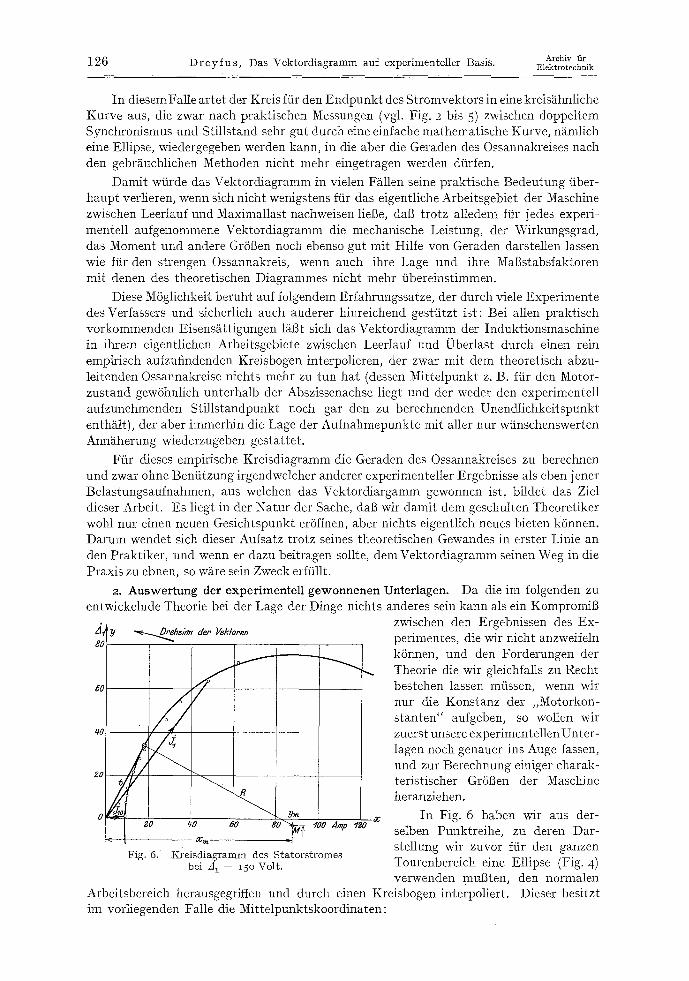
Nreisd iagramm des S ta tors t romes bei A I = I5o Volt.
/r --aT
~4r ~ "100 Amp q2O 4
zwischen den Ergebnissen des Ex- perimentes, die wir nicht anzweifeln k6nnen, und den Forderungen der Theorie die wir gleichfalls zu Recht bestehen lassen mtissen, wenn wir nur die Konstanz der ,,Motorkon- stanten" aufgeben, so wollen wir zuerst unsere experimentellen Unter- lagen noch genauer ins Auge fassen, und zur Berechnung einiger charak- teristischer Gr6Ben der Maschine heranziehen.
In Fig. 6 haben wir aus der- selben Punktreihe, zu deren Dar- stellung wir zuvor Itir den ganzen Tourenbereich eine Ellipse (Fig. 4) verwenden mnl3ten, den normalen
Arbeitsbereich herausgegriffen und durch einen Kreisbogen interpoliert. Dieser besitzt im vorliegenden Falle die Mittelpunktskoordinaten:

t9t ~. D r e y f u s, Das Vektordiagramm auf experimenteller Basis. 127 I. Bd, 3. Heft.
und den Radius
dem ein Leer laufs t rom
x m = 8 8 A m p .
Ym = - - 3 Amp. R = 79 Amp.
J l o - x m - - R = 9Amp"
entpsricht. DaB wir dabei Ym als negative Gr6Be erhielten, zeigt uns schon, dab wit nicht mehr auf dem Boden der strengen Theorie stehen, die bekannt l ich nur positive Werte zu- lassen wtirde. Wie dem aber auch sein mag, auf jeden Fall kann unabh~ngig von den Siitti- gungsverhSiltnissen der Maschine der S ta tors t rom durch den Ansatz beschrieben werden"
J12 = x" + y2 = 2 (x Xm + y Ym) - - t~" . . . . . . . I) w e n d
t = ] / X m 2 "q- ym ~ - R e
die L~nge der Tangente vom Koord ina tenanfangspunkt bis zum Berf ihrungspunkt mit dem Kreise bezeichnet.
Dieselben Belas tungsaufnahmen, die wir gerade durch ein Kreisdiagramm wiedergaben, sind in Fig. 7 als Lineard iagramm dargestellt, in dem auBerdem noch die Tourenzahl n.~ und die Sehltipfung
n I - - n 2 S - - (n 1 = synchrone Tourenzahl)
111 7g"
als Funkt ion der aufgenommenen ~a~le is tung W 1 aufgetragen ist. DaB diese Schaulinien in der N~ihe des Synchronismus ge- ~eoo radlinig verlaufen, ist jedem Fach- @/4 mann gel~ufig, und man wird es daher billigen, wenn wir das daraus zu ent- wickelnde Verh~iltnis der Schltip- Iungs~inderung pro aufgenommenes Ki lowat t
d s cos ~ %
t g ~ - - dW x 2) qooo ao
als besonders charakterist ische Gr6Be in den Vordergrund unserer Betrach- 80 "d / tungen stellen, die wir zun~ichst an 7o /
dem Beispiele eines mehrphasigen In- eo dukt ionsmotors ( P h a s e n z a h l - m) / durchfi ihren wollen. Die Frage, fiir 5oo 5o welchen P u n k t bzw. welche Touren- oo zahl wi r dieses Verh~ltnis berechnen wollen, b raucht zun~tchst nur dahin ao beantwor te t zu werden, dab der ge- ao wfihlte P u n k t jedenfalls im Bereiche r J der Kons tanz des Neigungswinkels ~ 1 gelegen sein soil. o z
Die LSsung der gestellten Auf- Fig. 7. gabe verlangt, dab man die aufge-
I
\ \
Co6 !
/!
/ /
/ /
/
/ /
6 8 ~0 12 r ~6 78
/ /
r Amp
8 % 2o
~5
q0
5
20/(w~ Belastungsaufnahmen im Lineardiagramm.
nommene Netzleistung W~ durch die Schliipfung ausdrticke, und zu diesem Zwecke 15sen wir die gesamte W a t t - A u f n a h m e in 3 Teilbetr~ige auf
W1 = V ~ + Vc~ + W~
Der erste Summ a nd V~. e bezeichnet die Eisenverluste; der zweite Summand
Vcul = m J12 r 1 Archly f. Elcktrotechnik. I . 9
Archly ffir 128 D r ey f u s, Das Vektord iagramm auf experimentel ler Basis. Elektrotechnik.
die Stator-Kupferverluste infolge des Phasenwiderstandes r 1. Sonach mul3 der 3. Summand tier gesamten auf den Rotor fibertragenen Leistung gleich sein, flit welche die Theorie des Drehstrommotors die bekannte Gleichung
W2 = m J2 2r-& . . . . . . . . . . . 3) S
an die Hand gibt. (J2 = Phasenstrom des Rotors, r,, = Widerstand einer Rotorphase.) Um schlieBlich den Rotorstrom noch in einfacher Weise auf den Statorstrom zuriick-
zuftihren, erlauben wir uns an dieser Stelle die Vernachl~ssigung der Wattkomponente des Magnetisierungsstroms, welche die Eisenverluste deckt. Ein nennenswerter Fehler entsteht hierdurch nicht, und wir erhalten den Vorteil, ffir das Verh~iltnis der beiden StrSme eine einfache Gleichung beniitzen zu k6nnen, auf deren Ableitung wit sp~ter (vgl. 8b) zurtick- kommen werden, n~mlich:
1/K1 K2 J ~ - - - s . . . . . . . . . 4) J1 V r~ 2 + K2 2 s 2
Hierin bedeutet : K~ die totale Selbstreaktanz der Statorwicklung, die uns nut ffir Leerlauf aus dem Ver-
h~ltnisse:
K1 __= ALl (A1 = Statorphasenspannung) J10
bekannt ist, im tibrigen abet infolge der Eisensfittigung ~nderungen erleidet, ebenso wie die analog zu definierende Selbstreaktanz:
K s der Rotorwicklung, a den Blondelschen Kodfizienten der Gesamtstreuung, der sich aus den bekannten
Streukoeffizienten des Stators (%) und Motors (~,~) wie folgt aufbaut:
I ~1 + % + % %
(I + .1)(I + .2) (I + q) (I + "2) und wie ftir das gew6hnliche Heylanddiagramm mit groBer Ann~therung dem Ver- h~iltnis
J10 6 - -
2 X m - - J10
gleichgesetzt werden darf. DaB dieser Koeffizient streng genommen auch schon im Arbeits- gebiet des Motors ein wenig variiert, braucht nicht beriicksichtigt zu werden, so lange er nur in der Differenz I - - ~ auftritt , wo er selbst und in noch hSherem Grade seine Schwan- kungen gegentiber der Einheit immer klein bleiben.
Ftihren wir nach diesen Erl~uterungen nunmehr mit Hilfe der Gleichung4) dieRotor- leistung W 2 auf den Prim~irstrom zurtick, so erhalten wir endgfiltig
2 K~ s . . . . . . 5) W 2 = m . I , r 2 ~ - 2 ( I - - ~ ) ( r ~ 2 + s ~
\ G /
Wir sind jetzt in tier Lage, die ~nderung der Leistungsverteilung bei Zunahme der Schltipfung, d.i . das Verh~ltnis
d W 1 dVFe dVcux dW2 ds -- c tg~ -- ds + ds + ds
ffir die drei Teilbetr~ge zu verfolgen, in der wit die Prim~trleistung aufgel6st haben: der erste Beitrag, die Eisenverluste sind irn Arbeitsgebiet der Induktionsmaschine praktisch konstant, so dab man den Differentialquotienten
dVre - - 0
ds

t912. D r e y f u s , , D a s V e k t o r d i a g r a m m a u f e x p e r i m e n t e l l e r B a s i s . 129 .Bd. 3. Heft.
setzen darf. Wie sich der zweite Summand, die primiiren Kupferverluste mit der Schliipfung iindert, h~ingt ganz yon der Wahl des Punktes ab, fiir den man die Rechnung durchffihren will, und da wir uns in dieser Hinsicht noch n ich t festgelegt haben, so kSnnen wir allen lJberlegungen damit aus dem Wege gehen, dab wir jetzt einfach such
dVc,, ~= o ds
postulieren. Wir haben damit die Berechnung des Neigungswinkels a ffir denjenigen Be- reich vorgeschrieben, ffir den sich der Statorstrom in n~ichster N~ihe seines Minimums b e - wegt, und es kann keinem Zweifel unterliegen, dab wir uns in diesem Bereiehe befinden, wenn wir uns nunmehr schliel31ich und endgtiltig auf den Synchronismuspunkt festlegen. F/Jr diesen Punk t wird also mit aller wiinschenswerten Genauigkeit:
IdW ,d., - ~ - s J~=o I d s - s J ~ = o = - " ~=o
und hieraus folgt mit Zuhilfenahme von Gleichung 5)
ds = tg ~ = r 2 . . . . . . 6) s = 0 m A t 2 ( I - - ~)
Hiernach ist die Zunahme der Schltipfung bei Belastung einfach proportional dern auf die Statorwicklung reduzierten Rotorwiderstand
K1 - - r e a l 2 ( I - , ) t g ~ . . . . . . . 6a) r2 red = r 2 K 2
und umgekehrt kann diese wichtige Konstante, die von der Eisens~ittigung so gut wie un- abh~ngig ist, in einfachster Weise aus den Belastungskurven des Lineardiagrammes (tg cd) und dem Kreisdiagramm (~!) abgeleitet werden.
3. Die Geraden des empirischen Kreisdiagrammes. Die Geraden der mechanischen Leistung und des Drehmomentes werden ftir das theoretische Kreisdiagramm als die Ver- bindungslinien des Leerlaufpunktes mit den Punkten des Stillstandes und der unendlichen Tourenzahl erhalten. Beide Punkte sind uns g~nzlich unbekannt. Und wenn wir sie se]bst experimentell feststellen k6nnten, so wtirde uns das nichts ntitzen; denn sie wfirden doch infolge der S~ttigungserscheinungen nicht auf der Peripherie unseres rein empirisch be- s t immten Kreisdiagrammes liegen und unsere Geraden des Momentes und der mechanischen Leistung wiirden weder hinsichtlich ihrer Richtung noch ihrer MaBstabsfaktoren mit denen des ftir irgendeine S~ttigung berechneten Kreisdiagrammes iibereinstimmen. So bleibt uns nichts tibrig, als mit unseren Uberlegungen ganz yon vorne anzufangen:
Wenn wir eine Unbekannte U im Kreisdiagramm mit HiKe einer Geraden abbilden wollen, so mtissen wir versuchen, sie auf die Normalform zu bringen:
U = f ( y - - x t g ~ - - c ) . . . . . . . . . . . . . . 7)
Hierin bezeichnen y un.d x die Wat t - bzw. Wattlose Komponente eines Aufnahme- punktes P; tg ~ den Neigungswinkel einer Geraden, welche die Ordinatenachse im Ab- stand c yore Koordinatenursprung schneidet, und endlich f den MaBstabsfaktor, mit dem
man den Ordinatenabstand P C des Aufnahmepunktes und des senkrecht darunter ge- legenen Geradepunktes zu multiplizieren hat, um die Unbekannte U auszudrticken (vgl. Fig. 8).
Aber damit noch nicht genug mtissen wit such noch verlangen, dab keine der oben ge- nannten Gr6Ben, f, tg ~ oder c durch die Eisens~ittigung merklich beeinfluBt werden.
Wenn wir nun zunS~chst versuchen, unter Eir~haltung aller dieser Bedingungen d ie mechanische Leistung mit HiKe des kombinierten Strom- und Spannungsdiagrammes
9*
130 D r e y f u s , Das Vektordiagramm auf eXperimenteller Basis. Archly ffir Elektrotechnik.
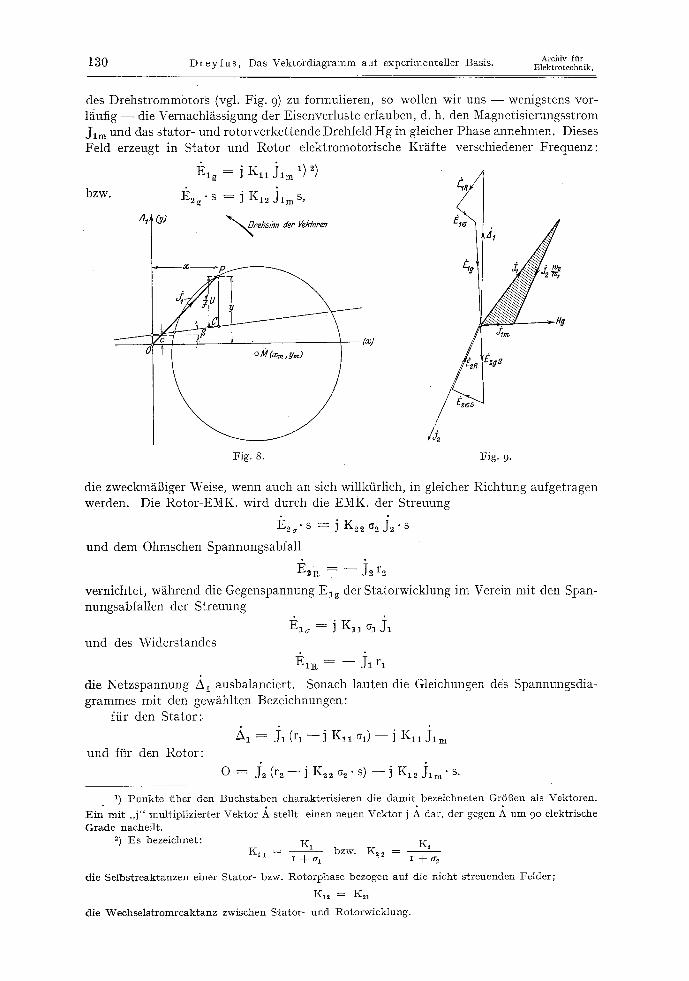
des Drehstrommotors (vgl. Fig. 9) zu formulieren, so wollen wir uns - - wenigstens vor- l~ufig - - die Vernachl~ssigung der Eisenverluste erlauben, d. h. den Magnetisierungsstrom Jim und das stator- und rotorverkettende Drehfeld Hg in gleicher Phase annehmen. Dieses Feld erzeugt in Stator und Rotor elektromotorische Kr~ifte verschiedener Frequenz:
J
bzw.
]~lg = i 1 { 1 1 J i m 1)2)
t~2g's = JK12j~mS' " ' ~7
rebslhn de" feMorea
~ ~gs
/
Fig. 8. Fig. 9.
die zweckmal3iger Weise, wenn auch an sich willkfirlich, in gleicher Richtung aufgetragen werden. Die Rotor-EMK. wird durch die EMK. der Streuung
k~.s = j t ~ 2 j ~ . ~ und dem Ohmschen Spannungsabfall
I ~ = - - j2r~.
vernichtet, w~hrend die Gegenspannung ]~lg der Statorwicklung im Verein mit den Span- nungsabfallen der Streuung
El~ = J Kl l r Jl und des Widerstandes
die Netzspannung /~1 ausbalanciert. Sonach lauten die Gleichungen des Spannungsdia- grammes mit den gew~htten Bezeichnungen:
fiir den Stator:
Xi = j~ (rl - - j K~l ~ l / - - J Kll L m und ffir den Rotor:
O = J 2 ( r 2 - - j K ~ . a ~ . s ) - - j K 1 2 j l m . s .
x) Punk te fiber den Buchstaben charaks die dami t bezeichneten Gr6Ben als Vektoren.
E in mi t , , j " multiplizierter Vektor A stellt einen neuen Vektor j A dar, der gegen A um 90 elektrische Grade nacheilt.
2) Es bezeichnet: K1 K2 I~11 bzw. K22 I + ~ I + ~ 2
die Selbstreaktanzen einer Stator- bzw. 1Rotorphase bezogen auf die nicht streueuden Felder;
K~2 = K21
die Wechselstromreaktanz zwischen Stator- und Rotorwicklung.
t912. D r e y f u s , Das V e k t o r d i a g r a m m auf exper imente l l e r Basis. 131 I. Bd. 3. Heft.
Hieraus eliminiert man noch den Magnetisierungsstrom mit Hilfe der Vektor- gleichung des Amperewindungsdiagrammes
J l l I1W1 : j I W 1 -J- j 2 W 2
und erh~ilt dann die bekannten Grundgleichungen des Mehrphasenmotors:
s = J1 (rt - j - J J2 . . . . . . . 8 a) und
O = /12(r2--j s)--jK jts . . . . . . . 8b) Da wir bei ihrer Ableitung die Eisenverluste vernachl~tssigt haben, so wfirde hiernach
die Wattkomponente y des Netzstromes um einen - - allerdings sehr kleinen t3etrag VFe
Jlw = in A~-I zu klein erhalten werden. Die wattlose x-Komponente hingegen wird durch
diese geringffigige Vernachl~tssigung tiberhaupt kaum berfihrt, und da wir in den folgenden Rechnungen, soweit sie an die Grundgleichungen 8) anknfipfen, nur dieser Gr613e begegnen werden, so haben wir keinen Grund, nachtr~glich eine Korrektur anzubringen.
Ehe wir jedoch die abge, leiteten Gleiehungen zur Bereehnung der Geradei1 der mecha- nischen Leistung weiter verwenden, wollen wir uns erst unsere Marschroute ein wenig zu- rechtlegen' die mechanische Leistung k6nnten wir offenbar sehr einfach durch den Aus- druck beschreiben :
w W a t t 2 m : Wt - - (Vre + V~) - - (Vc.1 + Ve,,) . . . . . . 9)
Von diesen Gr613en k6nnen wir die Netzleistung aus den Belastungskurven ablesen - - ; die Eisen- und Reibungsverluste V~,e + V~ sind im Arbeitsbereich des Motors als konstant zu betrachten und folgen aus der Leerlaufleistung nac h Abzug der Stator-Kupferverluste - - die prim~iren Kupferverluste Vcu I sind proportional dem Quadrate des Statorstromes, den wir nach Gleichung I) aus dem aufgenommenen Vektordiagramm ausdrficken k6nnen. So bleibt nur noch die Berechnung der sekund~iren Kupferverluste,
Vcu~ : re . J22r 2
und dieses ist es, was unsere Grundgleichungen leisten mfissen. Zu diesem Zwecke multiplizieren wir jetzt die erste Grundgleichung 8a) auf innere
Weise mit dem Vektor ( - - j J~) und ebenso die zweite Gleichung 8b) mit dem Vektor
(j j~) und erhalten:
A t x = J : 2 K t - ~ j t ' j 2 K 2 t bzw.
o = + jI.j KI
Hieraus folgt dutch Subtraktion:
A t x -- J12K t ~ J ~ K 2
oder mit Einffihrung des auf die Statorwindungszahl reduzierten Rotorwiderstandes
K1 r2red ~---- r 2 K2
und des Magnetisierungsstromes At J l I n - - Kt
I - - Vc~ = J ~ r 2 = (Jr 2 - - Jtm x) r2rea . . . . . . . ZO) 1TI
Diesen Ausdruck k6nnen wit unmittelbar in Gleichung 9) einffihren und erhalten dann
I I - - W2m = A t y - - J12 (r t + r2re4) Jr- J i m x r2red - - - - ( V r e -~- VR) m m
132 Dreyfus, Das Vektordiagramm auf experimenteller Basis. Archiv far Elektrotechnik.
oder, wenn man J12 dureh Gleichung I) ausdriickt"
wWm art = in [A 1 - - ~yr~(rl + r~red)]"
I y t 2 (rl + r2rea) I (Vl% + Vg) ] 2 xm (rl + r2r~d) - - Jim r2r~d m J - - X A 1 - - 2 Yrn (rl + r2rea) + A 1 - - 2 Ym (h + r~red) "
Damit haben wir unser erstes Ziel erreicht. Wir haben den Ausdruck fiir die mecha- nische Nutzleistung des Motors auf die durch Gleichung 7) verlangte Normalform gebracht, ohne irgend eine andere GrSBe zu verwenden, als allein die Auswertung der Belastungs- kurven an die Hand gab. Sind aber auch die so vermit tel ten Bestimmungsstficke der Leistungsgeraden, ihr MaBstabsfaktor, die Lage des Schnittpunktes mit der Ordinaten- achse und ihre Neigung wirklich unabh~ingig yon der Eisensiittigung konstant?
Ftir den Mal3stabsfaktor
f = r e ( A 1 - - 2 ym (rl + r2red)
kann hieran kein Zweifel sein. Denn Ym ist bei uns eine ganz andere GrSBe als in dem theo- retischen Diagramm. Dort wird es durchRechnung erhalten und ist dem Magnetisierungs- strome proportional. Hier hingegen ist es nach den Ergebnissen der Belastnngsaufnahme yon uns gew~hlt und daher eo ipso konstant. Auf die Ver~inderlichkeit der aus der Schliip- fungskurve abgeleiteten reduzierten Rotorwiderstandes wurde schon bei frtiherer Ge- legenheit hingewiesen,
I m Gegensatz hierzu scheint auf den ersten Blick die Unabh~ingigkeit yon der Eisen- s~iftigung ftir den Neigungswinkel der W2m-Geraden
2 Xm (rl + r2rea) - - Jim rered
= arctg A 1 - - 2 Ym (rl @ r2recl)
nicht zu bestehen, da hier neben anderen konstanten GrSBen auch der ver~inderliche Mag- netisierungsstrom im Z~ihler auRritt . Sieht man abet n~iher zu, so erkennt man, dab der verlinderliche Subtrahent Jim r~rea im Verh~iltnis zum konstanten Minuenden 2 x m (r + r2red ) nur wenige Prozent ausmacht - - ftir die frfiher angegebenen Zahlenwerte eines ges~ittigten Motors z .B. nur 2 � 8 9 %, und zugegeben, dab der Magnetisierungsstrom im Belastungs- gebiet Schwankungen bis zu 2o % erleiden kann, so bedeutet ihre Vernachliissigung doch erst einen Fehler v o n � 8 9 % im Neigungswinkel der W2m-Geraden und einen noch kleineren
Fehler in der Strecke P C, d. h. der mechanischen Leistung selbst. Im iibrigen bleibt dies auch die einzige Vernachliissigung, zu der wir uns gen6tigt sehen,
denn die Ordinate c des Schnittpunktes mit der )k 1-Achse setzt sich nut aus wirklichen Kon- stanten zusammen. Ihr Zahlenwert interessiert daher auch gar nicht. Denn nachdem durch die Konstanz aller in Betracht kommenden Gr6gen der Beweis ftir die M6glichkeit einer Wem-Geraden erbracht ist, genfigt, es, allein ihren MaBstabsfaktor und Neigungswinkel zu kennen. Unter diesem wird sie dann einfach durch den Leerlaufpunkt gezogen, dem sie ja nach ihrer Definition unbedingt enthalten mug.
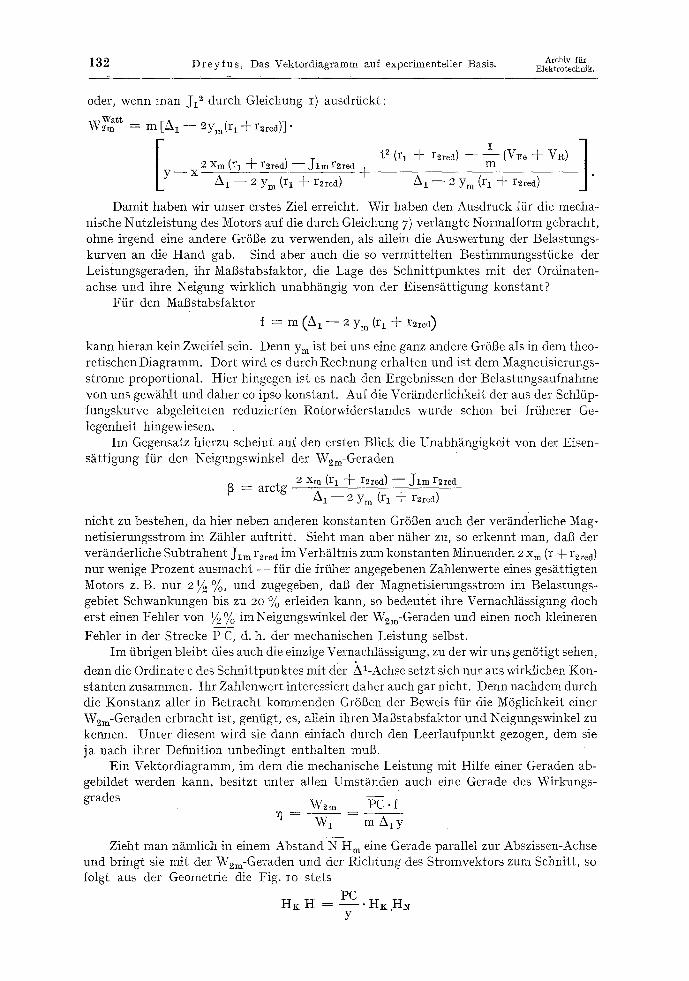
Ein Vektordiagramm, im dem die mechanische Leistnng mit Hilfe einer Geraden ab- gebildet werden kann, besitzt unter allen Umst~inden auch eine Gerade des Wirkungs-
grades W2m PC �9 f
:q = W 1 m A l y
Zieht man n~imlich in einem Abstand N H m eine Gerade parallel zur Abszissen-Achse und bringt sie mit der W2m-Geraden und der Richtung des Stromvektors zum Schnitt, so folgt aus der Geometrie die Fig. Io stets
PC H K H = - - . HK',HI~
Y
19J2. D r e y f u s , Das Vek to rd i ag ramm auf exper imente l le r Basis. 133 I. Bd. 3. Heft.
Diese G!eichung stimmt aber vollkommen mit der letzten Gleichung des Wirkungs- grades tiberein, wenn nur in dem ftir ~] gew~ihlten MaBstabe
f HN HK --
nl A I
gemacht wird, lind durch diese 13cdingung haben wir nunmehr auch den Abstand festgelegt, in dem die :q-Gerade parallel zur z% 4bszissen-Achse zu ziehen ist.
Der Beweis fiir die M6g- lichkeit, auf diese einfache
Weise die entwickelten Pferde- ,-Ge~a, st~trken und den Wirkungsgrad - - unter roller Berficksichtigung der Eisens~ittigung abzubilden, sollte eigentlieh allein schon ge- ntigen, um dem Vektordiagramm auch ftir die Praxis denjenigen Platz zu sichern, den es in der c Theorie l~tngst behauptet. Wit wollen bier jedoch ftir den Dreh- strommotor auch noch einige andere Gragen zur Abbildung bringen, die ffir die Bewertung
(y)
//
HK~ _Gerad e " / / / / / _ _ _ _ K
(a:)
o MCx,~, y,~)
Fig. IO. Die Geraden der mechanischen Leis tung und des Wirkungsgrades .
der Maschine von Interesse sind, nfimlich die Gesamt-Verluste und das Drehmoment. Den Ausdruck ffir die Gesamtverluste muBten wit schon bei tier Ableitung der W2m-
Geraden bilden und k6nnen ihn daher jetzt den dort ausgeffihrten Rechnungen unmittel- bar entnehmen. Er lautete:
Vg = (Vr~ + V~) + (Ve.~ § Veu~)
= (Vve + V~) + m J1 ~ (r 1 + r2re~l) - - m J Imx r~red oder
Vg = In [2 x m (r 1 -~- t ired) - - J i m r2red] "
[ 2Ym(rl+r2red) t 2 ( r l + r 2 r e d ) - - ~ - (VFeq-Vt~) ]
x + y 2 Xm (rl + r2red) - - J l m r2red 2 Xm (rl + r2red) - - J i m r2red .J I2)
Diese Gleichung besitzt die Normalform
U -- f ( x + y t g y - - d )
und kennzeichnet hiernach als Unbekannte U, den mit dem MaBstabsfaktor f multzipli-
zierten Horizontalabstand P V irgend eines Aufnahmepunktes P von einer Geraden, die die Abszissenaehse im Abstand d yore Koordinatenursprung schneidet, und deren
Richtung der Richtung des Spannungsvektor /~1 urn einen Winkel y voreilt (Fig. II). In unserem Falle betrfigt somit die MaBstabskonstante
f ---~ m [2 Xm (r 1 -{- r2red) - - Jim r2red],
Die Tangente des Neigungswinkels gegen die Ordinatenachse
2 Ym (r l + rsred) t g y = m. f
und endlich die Abszisse des Schnittpunktes mit der x-Achse:
m t 2 (r 1 + r2red) - - (VFe @ VR) d =
f
134 D r e y f u s , Das V e k t o r d i a g r a m m auf exper imente l le r Basis . Archly ffir Elektrotechnik.
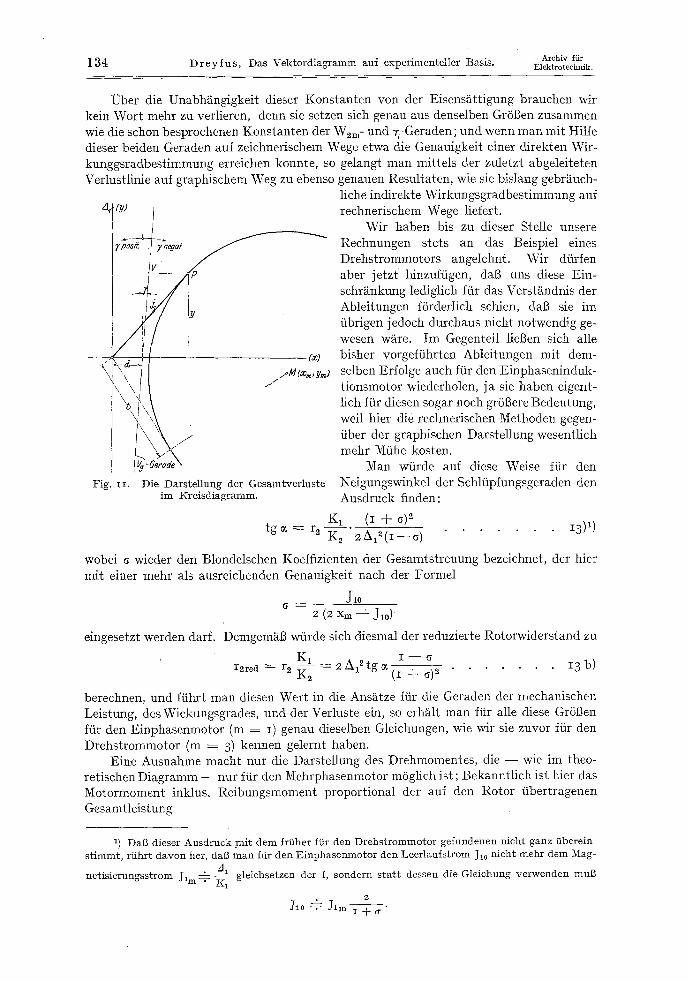
~ber die UnabNingigkeit dieser Konstanten yon der Eisensiittigung brauchen wir kein Wort mehr zu verlieren, denn sie setzen sich genau aus denselben Gr613en zusammen wie die schon besprochenen Konstanten der W2ra- und ~q-Geraden; und wenn man mit Hilfe dieser beiden Geraden auf zeichnerischem Wege etwa die Genauigkeit einer direkten Wir- kunggsradbestimmung erreichen konnte, so gelangt man mittels der zuletzt abgeleiteten Verlustlinie auf graphischem Weg zu ebenso genauen Resultaten, wie sie bislang gebr~iuch-
7 ~ e y a ~
~I'X I ./..o M (ar , yrM /
Fig. I i .
/ . /
Die D a r s t e l l u n g der G e s a m t v e r l u s t e im K r e i s d i a g r a m m .
liche indirekte Wirkungsgradbestimmung auf rechnerischem Wege liefert.
Wir haben bis zu dieser Stelle unsere Rechnungen stets an das Beispiel eines Drehstrommotors angelehnt. Wir dtirfen aber je tz t hinzuftigen, dab uns diese Ein- schdinkung lediglich fiir das Verst~indnis der Ableitungen f6rderlich schien, dab sie im iibrigen jedoch durchaus nicht notwendig ge-
wesen w~ire. Im Gegenteil lieBen sich alle bisher vorgeftihrten Ableitungen mit dem- selben Erfolge auch fiir den Einphaseninduk- tionsmotor wiederholen, j a sie haben eigent- lich ftir diesen sogar noch gr6gere Bedeutung, weil hier die rechnerischen Methoden gegen- fiber der graphischen Darstellung wesentlich mehr Mtihe kosten.
Man wiirde auf diese Weise ftir den Neigungswinkel der Schliipfungsgeraden den Ausdruck finden :
K1 (I + ~)~ . . . . . . . 13)~ )
wobei ~ wieder den Blondelschen Koeffizienten der Gesamtstreuung bezeichnet, der hier mit einer mehr als ausreichenden Genauigkeit nach der Formel
J10 2 (2 Xm - ~ J10)
eingesetzt werden darf. Demgem~iB wiirde sich diesmal der reduzierte Rotorwiderstand zu
K 1 I - - * 13 b) r2recl = r ~ = 2A 1 2 tg ~ ( i + G) ~ . . . . . . .
berechnen, und fiihrt man diesen Wert in die Ans~tze fiir die Geraden der mechanischen Leistung, des Wickungsgrades, und der Verluste ein, so erh~ilt man fiir alle diese Gr6Ben ftir den Einphasenmotor (m = I) genau dieselben Gleichungen, wie wir sie zuvor fiir den Drehstrommotor (m = 3) kennen gelernt haben.
Eine Ausnahme macht nur die Darstellung des Drehmomentes, die - - wie im theo- retischen Diagramm - - nur fiir den Mehrphasenmotor mSglich ist ; Bekanntlich ist hier das Motormoment inklus. Reibungsmoment proportional der auf den Rotor fibertragenen Gesamtleistung
1) DaB dieser A u s d r u c k m i t d e m fri iher fiir den D r e h s t r 0 m m o t o r g e f u n d e n e n n ich t ganz i iberein s t i m m t , r i ihr t d a v o n her, dab m a n fiir den E i n p h a s e n m o t o r dell L e e r l a u f s t r o m J10 n ich t m e h r dem Mag-
a
gle ichse tzen der f, s onde rn s t a r t dessen die Gle ichung v e r w e n d e n mul3 n e t i s i e r u n g s s t r o m l,m-- 2
J ~ 0 - - J , m i + ,
t9t2. Dreyfus Das Vektordiagramm auf experimenteller Basis. 135 I. Bd. 3. Heft.
n~imlich :
W 2 = W 1 - m J x 2r 1 = m j22 r2 S
D m k g - - W 2
Nun kann man mit Hilfe der Gleichung I) W 2 auch wi e folgt ausdrticken:
W~ = in[A l y - r 1 ( 2 x x m + 2 y y m - - t 2 ) t
und somit wird in der Normalform 7)
2 X m r 1 _@ t 2 r 1 .] 14 ) D m k g _ Ill nl ( A l _ _ 2 Y m r l ) Y - - X A 1 - - 2 Y m r l
~ 1~ 2 Yl~ ~xJ 9 . 8 I 27: 6-o
Diesmal besteht ftir alle Bestimrnungsstticke eine absolute Unabh~ngigkeit yon der Eisens~ittigung. Sowohl der MaBstabsfaktor
I n fD - - (A i - - 2 Ym rl)
nl 9 . 8 I 2 r : 6 ~
als auch die Tangente des Neigungswinkels
2 Xm r 1 tg ~ =
A 1 - - 2 Ym r l
und die Abszisse des Schnittpunktes mit der y-Achse:
t 2 r 1 e =
A 1 - - 2 Ym rl
enthalten nut wirkliche Konstante. Auf die Berechnung der letzten Gr6Be kann gew6hnlich verzichtet werden. Denn da der Motor bei Synchronismus kein Moment zu erntwickeln ver- mag, gentigt es, die Gerade durch diesen Punkt unter dem Neigungswinkel ~ zu ziehen, wenn man das Moment nur irn normalen Arbeitsbereiche der Maschine darzustellen braucht. Sollte hingegen das Kippmoment des Motors aufgesucht werden - - eine Aufgabe, die in der Praxis h~ufig gestellt aber nur selten richtig gel6st wi rd - - , so mtiBte man erst denj enigen Teil des Ellipsendiagrammes, auf dem der gesuchte Punkt mutmaBlich gelegen ist, durch einen weiteren Kreisbogen interpelieren, fiir welchen dann s~tmtliche Konstante der Dreh- momentgeraden nach den letzten Gleichungen neu zu berechnen w~tren.
Z u s a m m e n f a s s u n g .
Ftir Ein- und Mehrphaseninduktionsmotore wird nachgew!esen , dab die Darstellbar- keit der mechanischen Leistung, der Verluste und des Wirkungsgrades (beim Mehrphasen- motor auch des Drehmornentes) mit Hilfe von Geraden durchaus nicht an das ftir eine bestimrnte S~ttigung berechenbare theoretische Kreisdiagramm gebunden ist. Vielmehr ist dieselbe M6glichkeit ftir jeden Teil eines beliebigen experimentell aufgenommenen Admittanzdiagrarnrnes gegeben, sobald dasselbe genau genug durch einen Kreisbogen ersetzt werden kann. Es wird daher vorgeschlagen, das Vektordiagramm mehr als bisher in der Praxis zu beniitzen.










![Titrationsbestimmung von Fluorid-Ionen führen wir ein Bestimmungsverfahren der Fluoride durch Titration, bei welcher als Indikator Methylthymolblau dient, an [15—17]. Experimenteller](https://img.pdfslide.net/doc/110x75/5f7f39039685e753da54d273/titrationsbestimmung-von-fluorid-ionen-fhren-wir-ein-bestimmungsverfahren-der.jpg)







![III. Experimenteller Teil - duepublico2.uni-due.de · Polymer Blend erreichen [80]. Das in dieser Arbeit als Probenmaterial verwendete PP ist ein kommerziell erhältliches Produkt](https://img.pdfslide.net/doc/110x75/5cd4e23088c99325338d7fc9/iii-experimenteller-teil-polymer-blend-erreichen-80-das-in-dieser-arbeit.jpg)










