Embed Size (px)
Citation preview

Preliminary Detailed Design Design Review
HABIP High Altitude Balloon Instrumentation Platform
P17104 & P17105November 3, 2016

Team Members
2
Team Team Member Major Team Roles Other Roles
Communications
Adam Steenkamer EE Project Manager Component Standardization Manager
Connor Goldberg EE Lead Embedded Engineer Agency Compliance Manager
Ian Prechtl ME Lead Mechanical Engineer Thermal Manager
Matt Zachary EE Lead Hardware Engineer Wire Manager
Data Acquisition and Control
Systems
Sydney Kaminski ME Project Manager
Weight, Volume, and Other Shared Mechanical Attributes Manager
Lincoln Glauser EE Lead Embedded Engineer User Guide Documentor
Chris Schwab EE Lead Hardware Engineer Power Manager
Steven Giewont EE Lead Controls Engineer Instrumentation Package/Integrator

Agenda1. System Block Diagram2. Weight3. Structure4. Reaction Wheel & Controller5. DAQCS Subsystem Design
a. Block Diagrams/Configurationb. MSP430 Subsystemc. Raspberry Pi Subsystem & Sensor Demod. IMU & Demoe. GRSSf. Bill of Materials/Updated Cost Feasibility Analysis
g. Subsystems Testing
3

Agenda6. COMMS Subsystem Design
a. Controller Planb. Commandsc. OSD & Demod. Amateur TV Transmission & Demoe. Transceiver Planf. Power Analysis
g. Custom PCB Boardh. Software Designi. Bill of Materials/Budgetj. Subsystem testing
7. Future Plans
4

System Block Diagram
5

System Block Diagram (DAQCS)
6

System Block Diagram (COMMS)
7

Weight
8
One of the most advanced amateur high altitude balloons!

Weight - DAQCS
9

Weight - COMMS
10

Structure
11
● Stuck with the radial design● Modified our RX wheel criteria, decreasing the apparent
negative effects of an increased radii● In comparison to the other concept “The Pill”, this design,
“The Disk” offers an 80% better component surface area to weight ratio.

Structure - Component Allocation
12
Heavy/High Power Components
Lower Power Components/Excess Comms Components “Isolated” from adjacent components

Structure - Key Component Placement
13
● All components critical to maintain
● Placement of motor makes it more difficult to dissipate heat
● ATV placement typical of other emissive components, and output specs given
-> For these reasons, the motor and ATV were used for initial simulations - to analyze system potential

Structure - Dissipative Network
14
● Design of a discrete dissipative network to maintain system health
● Next Phase: Network Design● Current Phase: Network Potential

Structure - Production
15

Structure - Prototyping
16

Reaction Wheel Torque Analysis
17
IMU’s maximum sampling rate: 819.2 Hz
Difference in the angular acceleration of the instrumentation platform to the reaction wheel
Angular acceleration of the instrumentation platform

Torque vs. Mass Required
18
Aluminum: ½ inch thick Torque Required: 0.2907 N-mTime to Ramp = 0.5 seconds

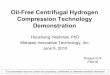
Torque vs. Radius Required
19
Radius Required: 0.05361 meters = 2.11 inches

Torque vs. Mass Required
20
Aluminum: ½ inch thick Torque Required: 0.4153 N-mTime to Ramp = 0.35 seconds

Torque vs. Radius Required
21
Radius Required: 0.0536 meters = 2.11 inches

Torque vs. Mass Required
22
Steel: ½ inch thick Torque Required: 0.2906 N-mTime to Ramp = 0.5 seconds

Torque vs. Radius Required
23
Radius Required: 0.03146 meters = 1.24 inches

Torque vs. Mass Required
24
Steel: ½ inch thick Torque Required: 0.4157 N-mTime to Ramp = 0.35 seconds

Torque vs. Radius Required
25
Radius Required: 0.03123 meters = 1.23 inches

Angular Velocity Analysis Rotational KERW = Rotational KEIP
0.5*IRWω2RW
= 0.5*IIPω2IP
ωRW = (IIP/IRW)0.5ωIP
ωIPMAX = π rad/s = 180 deg/sec
ωRWMAX = 50.1223 rad/sec = 478.6 RPM
26

Maxon Motors• Emailed Maxon Motors• Suggested the same
motor the team was looking at:– EC Brushless Motor
• Hall Sensors• PN: 323772
• Suggested a controller:– ESCON 70/10 Servo
Controller• PN: 422969
27

323772• EC Brushless Motor
– Hall Sensors– 90 Watt– 24 V– 2590 RPM– Nominal Torque: 0.444 Nm– Nominal Current: 6.06 A– Stall Current: 70A– Weight: 600 g
28

ESCON 70/10 • Brushless Motor Driver• Output Current: 10A/30A• Hall Effect Sensor Feedback• Analog: 2 Inputs, 2 Outputs• Digital: 4 Inputs• Weight: 259g (0.571lbs)• Programmable via USB and
Maxon Software
29

CAD Model
30
Cross Section of Motor, Flywheel, & Instrumentation Platform Top
CAD Model of Motor & Flywheel

Controller
31
Simulating maximum movement of
instrumentation platform

Reaction Wheel Testing
32
Mounting Surface Testing Setup

DAQCS Subsystem Design
34

System Block Diagram (DAQCS)
35

Block Diagrams/Configuration
36

Block Diagrams/Configuration
37
MSP430

Block Diagrams/Configuration
38

Block Diagrams/Configuration
39

Block Diagrams/Configuration
40

Block Diagrams/Configuration
41

MSP430 Host• MSP430FR5994 LaunchPad as our host• Low cost, no additional development/test
time needed for a custom PCB• Small hardware modifications needed to
access all necessary pins
42

MSP430 Launchpad Mods
43

MSP430 Launchpad Mods
44
Other Hardware Modifications● Remove C1 (super cap) ● Remove J1/J2/J3/J4 headers and replace with custom connectors ● Remove all jumpers on J101 after MSP has been flashed with mission FW
- Isolates debug EZ-FET HW● 3.3V Power supplied from add-on 5V-to-3.3V LDO on Adafruit Booster Board
Other Software Modifications ● Disable LED1/LED2 on P1.0/P1.1

MSP430 UART Rework
45

MSP430 SPI Rework
46

MSP430 uSD Card Rework
47

MSP430 Completed Rework
48

MSP430 System Power
49

MSP430 Power Architecture
50
• Single-cell LiPo battery (Vbat = 3.0V ~ 4.2V)• TPS61090 Boost Converter (Vbat → 5V)
– 5V supplies IMU– 5V → 3.3V LDO for MSP and uSD
• 500mA Battery Charger

Raspberry Pi Sensor Nodes• Raspberry Pi Zero (with uSD)• Low cost, no additional development/test
time needed for a custom PCB• Only need a small perf-board for sensors
51

Sensors• RasPi v2.1 Camera -- MIPI• 3x Temperature Sensors -- 1-Wire
– two external, one internal• Pressure Sensor -- I2C
– internal, using two different pressure sensors
52

Raspberry Pi Wiring Diagram
53

Raspberry Pi System Power
54

Raspberry Pi Power Architecture
55
• Single-cell LiPo battery (Vbat = 3.0V ~ 4.2V)• TPS61090 Boost Converter (Vbat → 5V)
– 5V supplies RasPi• 500mA Battery Charger

RasPi Software Flow Diagram
56

RasPi Software Flow Diagram
57

RasPi Software Flow Diagram
58

RasPi Software Flow Diagram
59

Basic MSP430-Pi Sensor Demo
60

Demo-CSV
61

IMU• SPI interface• Request specific IMU data (ex. rad/s)• Send IMU data over UART to PC to analyze and
prototype. • Use IMU data on MSP430 in a control setup to drive
motor
62

GRSS
63
Simplification

Bill of Materials
64

Budget - DAQCS
65

Test Plans• Reaction Wheel
– Movement Testing– Environmental Testing– Controller Testing
• GRSS – Visual & Audio Range Testing– Environmental Testing– Power Testing
• Sensor Acquisition – Performance/Speed Testing– Environmental Testing
• Sensor Data to COMMS– Performance/Speed Testing– Environmental Testing
• System Power Draw – Environmental Testing (i.e. pressure & temperature)
• Conformal Coating– Environmental/Moisture Testing
66

COMMS Subsystem Design
67

Raspberry Pi Host• Supports 2x SPI, 1x UART, 1x I2C, and GPIO• Our interfaces:
– UART w/ level converter for OSD RS-232– MicroUSB for our transceiver plan– SPI to interface with HABIP-DAQCS– GPIO to control analog video mux– I2C for DAC to control ATV Transmitter
potentiometer for RF output control, temperature sensor, redundant GPS
– I2C or SPI for APRS– MicroSD support built into Raspberry Pi Zero for
storing data relevant to COMMS subsystem• Can cover all of these interfaces
68

Preliminary Ground Command List
• Change analog camera source (1 of 4 cameras)• Change APRS transmission interval• Change what data is shown over the analog
video by the OSD• Change data transmission interval• Change HD cameras between video and picture
modes• Command to turn the reaction wheel on/off• Command to command the reaction wheel to
turn by a certain amount of degrees• Modify the ATV Transmitter output power
69

Commands from COMMS to DAQCS
• Not all necessarily have ground commands• Commands to request data:
– Request temperature from 1/3 temp sensors from 1/4 Pi Zero boards
– Request pressure/altitude from 1/4 Pi Zero boards– Request IMU data from MSP430– Request temp data from MSP430
• Commands to command action:– Start all sensor logging– Time sync for logging– Tell Pi Zero boards to toggle between video and picture modes– Process status request– Command heading (if have compass) or amount of degrees to
turn for reaction wheel– Turn reaction wheel on/off
70

OSD Functional Diagram
71

Demo - OSD
72

Transceiver Plan
75

RF Connections
76

Power Analysis
77

78
Power Analysis

Custom PCB• 1 custom PCB board for COMMS• Contents/components:
– Redundant GPS module– Temp sensor (for temperature of board)– RS-232 level translator for OSD module– Analog video mux– Audio breakout & circuitry (like attenuation?)
for transceiver, push-to-talk– Power management for COMMS subsystem
and DAQCS analog video cameras• Most likely 4 layers due to RF for GPS
79

Software Flow
80

Bill of Materials/Budget
81

Bill of Materials/Budget
82

Bill of Materials/Budget
83

Test Plans● Test plans have been developed for the ATV and 2m
systems (see EDGE). The goals are to test:- Overall reliability- Performance vs distance- Performance vs temperature and pressure
● Need to develop environmental test plans - as there is no resource for altitude testing - High Risk Item
84

Future Plans
85

Gantt Chart - DAQCS
86

Future Plans - DAQCS• Finalize Part Orders
– Decide what batteries to use based off of time for motor-use
• Component Placement– Best way to mount, for vibrations– Controls concern (Dr. C.)
• Prototyping Software Implementation– MSP430– Raspberry Pi
• Reaction Wheel Control Scheme
87

Gantt Chart - COMMS
88

Future Plans - COMMS• Component placement and related design configurations• Thermal analysis, especially ATV and Reaction Wheel• Design for vibration• Finalize manufacturing/production methods• Test ATV with multiple analog cameras and the video multiplexer• Prototype and test 2m transceiver subsystem• Test APRS and write API• Write GPS API [12/5-12/8]• Write temperature sensor API• Develop more detailed schematic for COMMS subsystem• Develop communication protocol between COMMS and DAQCS
team• Develop communication protocol between COMMS and ground• Develop software/program flow diagrams
89

90
Questions?