Embed Size (px)
Citation preview

Detection of Target ManeuverOnset
JIFENG RU
VESSELIN P. JILKOV, Member, IEEE
X. RONG LI, Fellow, IEEE
ANWER BASHIUniversity of New Orleans
A classical maneuvering target tracking (MTT) problem(detection of the onset of a target maneuver) is presented in twoparts. The first part reviews most traditional maneuver onsetdetectors and presents results from a comprehensive simulationstudy and comparison of their performance. Six algorithms formaneuver onset detection are examined: measurement residualchi-square, input estimate chi-square, input estimate significancetest, generalized likelihood ratio (GLR), cumulative sum, andmarginalized likelihood ratio (MLR) detectors. The secondpart proposes two novel maneuver onset detectors based onsequential statistical tests. Cumulative sums (CUSUM) type andShiryayev sequential probability ratio (SSPRT) maneuver onsetdetectors are developed by using a likelihood marginalizationtechnique to cope with the difficulty that the target maneuveraccelerations are unknown. The proposed technique gives explicitsolutions for Gaussian-mixture prior distributions, and can beapplied to arbitrary prior distributions through Gaussian-mixtureapproximations. The approach essentially utilizes a prioriinformation about the maneuver accelerations in typical trackingengagements and thus allows to improve detection performance ascompared with traditional maneuver detectors. Simulation resultsdemonstrating the improved capabilities of the proposed onsetmaneuver detectors are presented.
Manuscript received January 25, 2007; revised July 16, 2007;released for publication January 24, 2008.
IEEE Log No. T-AES/45/2/933004.
Refereeing of this contribution was handled by W. Koch.
This research was supported in part by ARO GrantW911NF-08-1-0409, Navy Planning Systems ContractN68335-05-C-0382, and Project 863 Grant 2006AA01Z126.
Authors’ current addresses: J. Ru, Arcon Corp., Waltham, MA; V. P.Jilkov and X. R. Li, Dept. of Electrical Engineering, Universityof New Orleans Lakefront, New Orleans, LA 70148, E-mail:([email protected]); A. Bashi, Computrols, Inc., New Orleans, LA70113.
0018-9251/09/$25.00 c° 2009 IEEE
I. INTRODUCTION
Maneuvering target tracking (MTT) is animportant problem complicated by the fact thattarget accelerations are generally unknown and thatstructural variations may also exist as the targetmoves into or out of the maneuvering mode. Neitheraccelerations nor possible structural changes areavailable directly through measurements in practice.In general, the MTT problem is a hybrid estimationproblem since it involves discrete mode or parameterestimation as well as continuous state estimation.The decision-based techniques for MTT, whichappeared after the decision free adaptive Kalman filtertechniques based on a single model, have becomequite popular and have been studied extensively in theliterature [2, 3, 6, 21]. In decision-based approaches,the state estimation is based on a target motion modeldetermined by a hard decision maneuver detection.Therefore making reliable and timely decisions isthe key to these approaches for satisfactory stateestimation. Many algorithms and techniques havebeen developed to detect maneuvers. A comprehensivesurvey of such decision-based approaches is given by[21].Target maneuver onset and termination are
observable as changes carried in the measurements.The problem of detecting maneuvers thus can beclassified as maneuver onset detection and terminationdetection. Maneuver termination is in general muchharder to detect than maneuver onset, but also lessimportant [21]. Up-to-date maneuver termination israrely defined by any rigorous problem formulationand few methods have been presented in the literature.Onset detection algorithms can be categorized basedon which test they utilize: chi-square based tests andlikelihood ratio based tests. Techniques based onthe chi-square tests include measurement residual(MR) based and input estimate (IE) based detectors.Those based on the likelihood ratio tests include thegeneralized likelihood ratio (GLR) and marginalizedlikelihood ratio (MLR) detectors. These algorithmshave been widely used in MTT applications but toour knowledge there are no comprehensive referencesavailable for their performance comparison. Thefirst objective of this paper is to investigate andcompare the performance of these maneuver detectorsby conducting a comprehensive simulation studyin various maneuvering scenarios. The followingsix algorithms for maneuver onset detection areexamined: MR chi-square, IE chi-square, IE Gaussian(IEG) significance test, GLR, MLR, and cumulativesum (CUSUM).As pointed out in [21], better maneuver
detectors can be designed by employing moreadvanced, sequential, statistical tests for change pointdetection. Sequential detection procedures have beensuccessfully applied to fault detection (see, e.g.,
536 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

[23], [33]) but not to maneuver detection, to ourknowledge, except for a quickest detector in [35].Some solutions based on the min-max approach havebeen proposed in [24], [25], [26] with applications tonavigation system integrity monitoring. This approachoptimizes the worst case situations with given decisionerror rates.For maneuver detection, sequential testing
procedures are preferable because measurementsare available sequentially. Moreover, a sequentialtest does not need to determine the sample size inadvance unlike the nonsequential tests. A sequentialtest involves a stopping rule and a final decision toachieve a trade-off between sample size and decisionaccuracy. We consider detecting a target’s maneuveras a binary hypothesis testing problem. Once a targetstarts maneuvering, it should be detected as quickly aspossible under certain constraints such as the rates offalse alarms and missed detections. It is well knownthat for binary simple hypothesis testing, Wald’ssequential probability ratio test (SPRT) is optimal inthe sense that it makes the quickest detection underboth hypotheses (H0, H1) given any fixed false alarmand missed detection probabilities. The SPRT makesthe decision by comparing the likelihood ratio withtwo thresholds, determined to guarantee the specifiederror probabilities. However, the problem formulationof the standard SPRT does not fit well to the changepoint detection, such as maneuver onset detection. Inparticular, the SPRT assumes all data relate to one ofthe two hypotheses so that it simply chooses that thereis a change or that there is no change. Whenever adecision (H0 or H1) is made, the test will terminate.Clearly, this is not the goal of change point detection.In fact, we mainly want to know when the changeoccurs, if it does. Therefore, the test should continueto the next cycle with more measurements if H0 (nochange) is deemed true.There are several formulations in the literature
regarding change point detection. A non-Bayesianapproach, first proposed by Page in 1954, CUSUM,minimizes the detection delay given the decisionerror probabilities. It is one of the most popularalgorithms used to detect a possible change from agiven process to another given process. Shiryayevsequential probability ratio test (SSPRT), a Bayesianapproach proposed by Shiryayev in the early 1960s,minimizes a risk function at each time step with theassumption that the change point has a geometric priordistribution. It has been proven to provide the quickestdetection of a change in a sequence of conditionallyindependent measurements under the given decisionerror rates. Both CUSUM and SSPRT are optimal forsimple hypotheses, that is, distributions are completelyknown before and after the change, which is notthe case for many applications where change (e.g.,maneuver) magnitude is usually unknown (i.e.,H1 is a composite hypothesis). In order to apply
these sequential tests, modifications have to bemade.This paper proposes two novel target maneuver
onset detectors based on sequential tests: CUSUMtype and SSPRT tests for composite hypothesis,by using a likelihood marginalization technique tocope with the difficulty that the target maneuveraccelerations are unknown. The proposedmarginalization technique gives explicit solutionsfor Gaussian-mixture prior distributions, and canbe applied to arbitrary prior distributions throughGaussian-mixture approximations. The approachessentially utilizes a priori information aboutthe maneuver accelerations in typical trackingengagements and thus allows to improve the detectionperformance, especially for normal accelerations,as compared with two widely used maneuverdetectors.The paper is organized as follows. In Section II,
the problem of maneuver onset detection is formulatedas binary composite hypothesis testing. Section IIIprovides an overview of the most commonly usedmaneuver detection techniques. In Section IV,sequential maneuver onset detection proceduresbased on a repeated-SPRT and SSPRT are formulatedand discussed, and a methodology for likelihoodmarginalization is proposed. Furthermore, animplementation of the approach is developed byderiving the detectors’ test statistics using two typicalprior density models of maneuvers. Section V presentscomprehensive simulation results for performanceevaluation and comparison of the existing maneuveronset detectors summarized in Section III, and theproposed ones, developed in Section IV. Section VIgives a summary of the main results and conclusionsfrom the work. Mathematical derivations are providedin Appendices I—III.
II. MANEUVER ONSET DETECTION PROBLEM
The target-measurement model is given by
xk+1 = Fkxk +Gkuk +wk (1)
zk =Hkxk + vk, k = 1,2, : : : (2)
where xk is the target state, uk is the maneuvercontrol input, and zk is the measurement. wk »N (0,Qk) and vk »N (0,Rk) are independent processand measurement noises, respectively, and theinitial state x0 »N (0,P0) is independent of wkand vk.It is assumed that uk = 0 if the target is not
maneuvering at time k and uk 6= 0 if the target ismaneuvering. If the target begins a maneuver at anunknown time n· k then
huki= f: : : ,0, : : : ,0,un,un+1, : : : ,ukg:
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 537

In general, it is not necessary for u to remainconstant during the maneuver. The focus of themaneuver onset detection is to decide on a maneuverand estimate the onset time n, which can beformulated as a binary hypothesis testing problem:
H0 : um = 0 for m= 1, : : : ,k
H1 :
(um = 0 for m= 1, : : : ,n¡ 1um 6= 0 for m= n, : : : ,k
(3)
where u and n are unknown, and n is referred toas the change point. This is known as change pointdetection in the statistical literature.Since both u and n are unknown, hypothesis H1 is
clearly composite. This makes the maneuver detectiondifficult since in general there is no existing optimalnon-Bayesian solution for composite hypothesistesting problems.
III. OVERVIEW OF MANEUVER ONSET DETECTIONALGORITHMS
A. Measurement Residual Chi-Square Detector
The MR based chi-squared test is a very simpletool and has been used as a standard componentin many MTT applications [1, 3, 6, 9, 21]. Underthe linear-Gaussian assumption and H0, MRs of aKalman filter are zero mean, Gaussian, and white:zk »N (0,Sk) where zk = zk ¡ zkjk¡1 and Sk = cov(zk).As such, ²k = z
0kS¡1k zk is a Â
2nzdistributed variable
with nz = dim(zk). This property allows to check the“goodness of fit” so that we may judge if zk has theassumed distribution under H0. This leads to a simpletest for a maneuver:
²k > Â2nz(®))H1 (4)
where 1¡® is the confidence level of the test. Thismeans H0 will be rejected with confidence 1¡ a if²k exceeds the corresponding threshold. In practice,the moving sum ²sk for a sliding window of length sis often used, as is the exponentially decayingaverage ²½k ,
²sk =kX
j=k¡s+1²k (5)
²½k =kXj=1
½k¡j²j = ½²½k¡1 + ²k, 0< ½< 1: (6)
Clearly, ²sk is still chi-square distributed as ²sk » Â2snz ,
but a weighted sum of independent, identicallydistributed (IID) chi-square variables ²½k is onlyapproximately distributed as Â2n½=(1+ ½) withn½ = nz(1+ ½)=(1¡ ½). Its effective window lengthis 1=(1¡ ½). For example, ½= 0:8 corresponds tos= 5.
B. Input Estimate Chi-Square Detector
The basic idea of the IE detector is to explicitlyestimate the unknown input uk and then make adecision based on chi-square test of uk. Due to itssimplicity, IE detector is used in many algorithms intarget tracking [3, 8, 17, 21, 34]. Theoretically underH0 and the linear-Gaussian assumption, uk is zeroand thus uk is zero mean and Gaussian uk »N (0,§k)with §k = cov(uk). Similarly to the MR detector,²uk = u
0k§
¡1k uk is Â
2nudistributed with nu = dim(uk),
which provides a justification for the chi-square testfor maneuver onset detection. Clearly, the key to thisapproach is obtaining accurate input estimates.Under the linear-Gaussian assumption, u can be
explicitly estimated using a least-squares framework[3]. Assume the input is constant in the interval[k¡ s, : : : ,k¡ 1], i.e., ui = u, i= k¡ s, , : : : ,k¡1. It canbe shown that uk follows from the linear model
z =ªu+ v (7)
where z = [z0k¡s+1, : : : , z0k]0, ª = [ª 0
k¡s+1, : : : ,ª0k]0,
ªi =HPij=k¡s[
Qi¡j¡1m=0 ©i¡m]G, ©i = F[I¡KiH]: Then
the input estimate is given using least-squares batchestimation:
u= (ª 0S¡1ª )¡1ª 0S¡1z (8)
§ = cov(u) = (ª 0S¡1ª )¡1 (9)
S = diag(Sk¡s+1, : : : ,Sk), Si = cov(zi): (10)
The IE detector decides H1 if test statistics ²uk > ¸,
where ¸ is decided by the confidence level.
C. Input Estimate Gaussian Detector
This detector is also based on an input estimate,but uses a different test statistic [5, 7, 18]. Amaneuver will be declared if a component uik of ukis statistically significant; that is,
maxi
Ãjuikj§1=2i
!> ¸, i= 1, : : : ,nu (11)
where §1=2i = var(uik), and ¸ is determined from thestandard Gaussian distribution. The absolute value ofuik should be used since we are testing the significanceof uik rather than its direction.The above detectors are used regardless of
the maneuver model. For example, input estimatebased techniques directly estimate the unknowntarget acceleration u from available measurements.Moreover, chi-square based detectors only detectH0 and thus cannot control all decision errors (e.g.,missed detection rates). The next three detectors arebased on the likelihood ratio test, which is a standardmethod of hypothesis testing. Let
Lk(u,n) = logf(zks jH1(u,n))f(zks jH0)
(12)
538 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

denote the log-likelihood ratio of two hypotheses,H0 and H1, based on a set of measurements
zks¢=fzk¡s+1, : : : ,zkg, where f(zks jHi) (i= 0,1) is the
likelihood of the hypothesis.For simple hypotheses, i.e., maneuver u is known,
the likelihood ratio test provides an optimal solutionin the Neyman-Pearson sense. However, maneuversare usually not known in real MTT problems whichmakes the likelihood ratio in (12) unknown. Inthis case maneuver onset detection becomes acomposite hypothesis testing problem. We considertwo approaches to solving this problem.In the first approach, the unknown u (treated as
a constant) and n are replaced with their maximumlikelihood estimates (MLEs). This results in thegeneralized likelihood ratio test (GLRT). Thesecond technique is a Bayesian approach where thelikelihood under H1 is determined by an appropriatemarginalization, that is, taking expected values of thelikelihood wherein u is treated as a random variable.A priori probability distribution of u is needed for thistechnique. For MTT, prior information is availablein some cases [12]; in other cases a noninformativeprior may be assumed. This approach results in themarginalized likelihood ratio test (MLRT) [10, 11].
D. Generalized Likelihood Ratio Detector
The GLR detector is quite popular and has manyforms. Its basic idea is to replace the unknownlikelihood with the maximum likelihood. A fullimplementation of GLR requires a linearly increasingnumber of parallel filters, and so is infeasible for realMTT applications. Instead, a GLR algorithm basedupon a finite window is widely used [14, 31, 21,36, 37]. Assuming that u is a constant in the interval[k¡ s, : : : ,k¡ 1], (u, n) is used in test statistics given by
Lk(u, n) = logf(zks jH1(u, n))f(zks jH0)
=kX
i=k¡s+1log
f(zi jH1(u, n))f(zi jH0)
(13)
where the joint maximum (u, n)=argmaxu,nf(zks jH1(u,n))
can be found in two steps iteratively.In the first step, u(n) is estimated. Under the
linear-Gaussian assumption, the least-squares estimateu is equivalent to the MLE, and thus u(n) = uIE. In thesecond step, n is computed as the maneuver startingtime that maximizes the likelihood ratio given u(n),
n= argmaxn
Xi
logf(zi jH1(u(n),n))
f(zi jH0): (14)
The GLR detector declares a maneuver if the teststatistic Lk(u, n) exceeds a preset threshold ¸, where¸ is determined by the desired decision error rates.
E. Marginalized Likelihood Ratio Detector
The MLR test is a Bayesian approach whichassumes u is a random variable with a certain priordensity. The MLR detector replaces the unknownlikelihood with average marginalized likelihood byaveraging over all possible values of u
Lk(n) = logf(zki jH1(n))f(zki jH0)
= logE[f(zki jH1(u,n))]
f(zki jH0)
= log
Rf(zki jH1(u,n))f(u)du
f(zki jH0): (15)
The MLR detector declares a maneuver if Lk(n)> 0,where n= argmaxn Lk(n). This follows from themaximum likelihood decision rule.A major difficulty for the MLR detector is
how to calculate the integration in (15), which israrely possible analytically. An approximate MLRdetector was proposed [10], where a Kalman filteris used in both forward filtering and backwardsmoothing steps required in likelihood estimation forcomputing test statistics. A noninformative prior ofthe jump magnitude was used in this approximateMLR detector. Note that under some condition andwith a special choice of the GLR threshold, bothtests coincide [21]. Reference [10] illustrates howto correctly marginalize noise covariances of themodel being used, where it is considered a nuisanceparameter. Since we consider the noise statisticsto be known in this paper, this technique was notemployed.
F. CUSUM Based Detector
The CUSUM detector was first proposed forclassical change detection problems. For simplehypotheses, the CUSUM algorithm has been provento minimize the worst mean delay for detection whenthe mean time between false alarms goes to infinity[4], that is, the CUSUM detector guarantees thequickest decision when the target maneuver is known.However, since u is unknown as in our problem, ucan be used in the likelihood computation (u can beobtained, e.g., using the standard input estimationapproach). The CUSUM detector decides H1 ifLk ¡mink¡s+1·j·k Lj ¸ ¸, where ¸ is determined bythe desired decision error rates,
Lk =kX
i=k¡s+1log
f(zi jH1(u,n))f(zi jH0)
(16)
n=min½k : Lk ¡ min
k¡s+1·j·kLj ¸ ¸
¾: (17)
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 539

Since u is used, it is no longer possible to justifythe optimality of the CUSUM detector. Other possibletest statistics for the CUSUM test were discussed,including a CUSUM maneuver detector in [11].
IV. SEQUENTIAL DETECTION OF MANEUVERONSET
Before proposing sequential test procedures fortarget maneuver detection, we briefly present theSPRT for binary simple hypothesis testing. Let
Lk = logf(zk jH1)f(zk jH0)
=kX·=1
logf(z· jH1,z·¡1)f(z· jH0,z·¡1)
(18)
denote the log-likelihood ratio of two simplehypotheses H1 and H0 based on the measurements up
to k, where zk¢=(z1, : : : ,zk), f(z
k jHi) and f(z· jHi,z·¡1)(i= 0,1) are the joint and marginal likelihoods of thehypotheses, respectively. Further, let A and B be twothresholds such that P(“H1” jH0)· ®, P(“H0” jH1)·¯, (0< ®,¯ < 1), where “Hi” stands for “deciding onHi.” Then the SPRT decision rule is
Reject H0 if Lk ¸ logBReject H1 if Lk · logAContinue (k 7! k+1) otherwise:
(19)
However, the standard SPRT does not fit thesequential change point detection since it assumesall data relate to one of the two hypotheses, i.e., itsimply decides that there is a maneuver or that thereis no maneuver. The CUSUM and SSPRT are verypopular tests for sequential change point detectionbased on different assumptions. Unfortunately neithertest can be blindly used for the detection of maneuveronset since they work only for simple hypotheses,which is not the case for maneuver detection wheremaneuver magnitudes are usually unknown. In thefollowing sections, we modify and evaluate them forthe problem of maneuver onset detection.
A. Repeated SPRT-Based Detector: CUSUM
The standard CUSUM algorithm, also calledPage’s test, was proposed as a means to detectsequential changes in the distribution of adiscrete-time random process. It guarantees thequickest decision given the decision error rates forsimple hypotheses. Page’s test can be interpretedas a repeated SPRT with the lower threshold logAequal to 0 and the upper threshold equal to ¸ decidedby error probabilities. The key idea is to restart theSPRT algorithm as long as H1 is being rejected,which makes it naturally fit to change point detectionproblems.
The CUSUM algorithm can be written in arecursive manner [4]:
Lk =max½Lk¡1 + log
f(zk jH1,zk¡1)f(zk jH0,zk¡1)
,0¾, L0 = 0
(20)
and the decision rule is as follows.
1) Accept H1 (declare a maneuver) if Lk ¸ ¸. Then
stopping time n=minfk : Lk ¸ ¸g is the time that achange is detected.2) Continue the test (k 7! k+1) if Lk < ¸.
Asymptotic optimality of the CUSUM procedurehas been proved under a min-max criterion. It showsthat the CUSUM asymptotically minimizes the “worstcase” detection delay subject to a lower bound on themean time between false alarms. Many modificationsand extensions of the CUSUM-type test have beendeveloped for the online change-point detection instochastic control and signal processing, such as faultdetection in complex systems and signal segmentation[16, 15, 25].
B. SSPRT-Based Detector
The Shiryayev SPRT (SSPRT) focuses on thedetection in a series of conditionally independentmeasurements by noting the change in the probabilitydensity function (pdf) of the measurements. Someresults have recently been reported for fault detectionusing SSPRT [23, 33].The SSPRT minimizes an expected cost at each
time step. This cost includes the measurement costand the cost due to a terminal decision error by falsealarm or miss detection. The decision function canbe written in terms of a likelihood ratio or posteriorprobability ratio, which are equivalent once a prioris known. Since a Bayesian framework is used, it isnecessary to define prior information. This includesthe a priori probabilities of Hi (i= 0,1) and thetransition probabilities of H0 to H1 from k¡ 1 to k(which can be time variant or invariant). When abinary hypothesis test is performed, the transitionprobabilities degenerate into a single number, usuallyassumed to be time invariant for simplicity.The decision rule of the SSPRT is obtained by
defining the posterior probability ratio Pk. Let pk =Pfn· k j zkg denote the posterior probability that achange occurs (at an unknown time n) no later thantime k given the available measurements zk, and
Pk¢=
pk1¡pk
, PT¢=
pT1¡pT
(21)
where the choice of a preset threshold pT is related tothe desirable decision error rate. The SSPRT becomesthe following.
540 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

1) Accept H1 (declare a maneuver) if Pk ¸ PT. Thestopping time is n=minfk : Pk ¸ PTg.2) Continue the test (k 7! k+1) if Pk < PT.
Calculating pk is the key to the SSPRT.Fortunately, it can be done recursively. Let pi0 denotethe prior probability of hypothesis Hi being true,¼ the transition probability from H0 to H1, and
Áik¢=P(n· k+1 j zk) (i= 0,1). The recursive form of
the posterior probability of Hi is given by
p1k =Á1k¡1f(zk jH1,zk¡1)P1i=0Á
ik¡1f(zk jHi,zk¡1)
, p0k = 1¡p1k
Á1k¡1 = p1k¡1 +¼(1¡p1k¡1), Á0k¡1 = 1¡Á1k¡1:
Then, the test statistic of the SSPRT is
Pk¢=p1kp0k=f(zk jH1,zk¡1)f(zk jH0,zk¡1)
Pk¡1 +¼1¡¼ , P0
¢=p10p00:
Note that no reset mechanism is necessary for theSSPRT due to the nature of its problem formulationthat determines when a disruption of H1 is true.Further, if ¼ is zero, the SSPRT becomes the SPRT.This makes sense in that SPRT assumes all data relateto one of the two hypotheses.Note that the above SPRT-based procedures
assume that measurements are independent. However,measurements are correlated in many practicalproblems, such as the target tracking problem. In thiscase the above test still works provided the sequencehlki of marginal likelihood ratios is independent,where
lk =f(zk jH1,zk¡1)f(zk jH0,zk¡1)
:
Fortunately, this is approximately the case since themeasurement residual sequence hzki is approximatelyGaussian distributed and weakly coupled undersome conditions [20]. Thus measurement residualszk, instead of measurements zk, should be used tocompute likelihood ratios.
C. Computation of Test Statistics throughGaussian-Mixture Approximation
In this section, test statistics are developedfor the CUSUM and SSPRT detectors for anyprior distribution of the maneuvers based on amarginalization technique through Gaussian-mixtureapproximation.Denote by zk and Sk the MR and its covariance,
provided at time k by a nonmaneuvering Kalmanfilter for the system (1)—(2). As shown in Section IVAand IVB, the key to computing test statistics ofthe CUSUM and SSPRT detectors is to obtainthe likelihood functions f(zk jHi,zk¡1) under eachhypothesis (i= 0,1).
Under the linear Gaussian assumptions thelikelihoods of H0 and H1 are
f(zk jH0,zk¡1) =N (zk;0,Sk)
=1pj2¼Skje¡z
0kS¡1kzk=2 (22)
f(zk jH1,zk¡1) =N (zk;HGu,Sk)
=1pj2¼Skje¡(zk¡HGu)0S¡1k (zk¡HGu)=2
(23)
where the unknown u makes f(zk jH1,zk¡1) unknown.There are two common approaches to solving
this problem. The window-based GLR procedure islimited with the difficulty of choosing the windowsize and the threshold. In target tracking applications,prior distributions of some target maneuver motionsare available. Thus, a Bayesian-based approachcan be applied, where u is treated as random andf(zk jH1,zk¡1) is determined by an appropriatemarginalization–averaging over all possible valuesof the u as a nuisance parameter [11]. Specifically,
f(zk jH1,zk¡1) = E[f(zk jH1(u),zk¡1)]
=Zf(zk jH1(u),zk¡1)f(u)du (24)
where f(u) is the a priori pdf of u.Clearly, this approach provides a good means of
utilizing the a priori information if it is available. Amajor difficulty for its application is calculating theintegral in (24). The following proposition provides aneffective way for evaluating f(zk jH1,zk¡1) in general.PROPOSITION 1 If the pdf f(uk¡1) is a Gaussianmixture, i.e.,
f(uk¡1) = gN(uk¡1)¢=
NXi=1
¸iN (uk¡1; ui,§i) (25)
with ¸i > 0 andPNi=1¸i = 1, N ¸ 1, then the likelihood
f(zk jH1,zk¡1) is given explicitly by
f(zk jH1,zk¡1) =NXi=1
¸i'i(zk) (26)
where
'i(zk) =N (zk;HGui,Sk +HG§i(HG)0), i= 1, : : :N:
(27)
PROOF See Appendix I.
REMARK 1 An important implication of theabove result is that it can be used for approximatecomputation of the likelihood f(zk jH1,zk¡1)practically for any prior pdf f(u) of interest. Indeed,under some regularity conditions, any pdf f(u)can be approximated to any desired accuracyby a Gaussian-mixture pdf provided the number
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 541

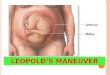
of components N is sufficiently large [32]. Inpractice, for a given N ¸ 1 the parameters (¸i, ui,§i),i= 1, : : : ,N of gN(u) can be determined throughminimization of the fitting error ²((¸i, ui,§i)
Ni=1) =
kf(u)¡ gN(u)k2 by some standard numerical methodsfor nonlinear multidimensional optimization. Sincethe analytical form of ²(¢) is in general unknown, asuitable and effective way to do this is by using directsearch methods [13]. As demonstrated in the nextsection (see Fig. 2) the Nelder-Mead simplex directsearch method [13] proved to be very efficient infinding a locally best fit for our implementation ofthis methodology. Higher accuracy can be achieved byincreasing the number of components N. It shouldbe noted that determination of the parameters ofthe Gaussian-mixture approximation is a part ofthe detector design and, even though it may becomputationally intense, it is done off-line. Thus,for any prior f(u) after obtaining an acceptableGaussian-mixture approximation f(u)¼ gN(u) thetest statistics of CUSUM and SSPRT detectorscan be obtained through (26)—(27). The approachis generally applicable when the marginalization(24) is hard to obtain in an exact analyticalform.If f(u) is uniform an explicit calculation of (24)
can be done as given in Appendix II.
D. Implementation of Sequential Detectors
Next, test statistics of maneuver detectionalgorithms are developed specifically for a typical2D target with curvilinear motions. This curvilinearmotion model accounts for possibly non-zero normal(cross-track) and tangential (along-track) targetmaneuver accelerations simultaneously.1) Maneuver Model: A 2D target maneuver
motion can be described as
xk+1 = Fxk +¡ (xk)ak +wk (28)
where the state in the Cartesian coordinates is x=[x, _x,y, _y]0 and the acceleration is a= [at,an]
0 withdecomposed tangential and normal components at andan. The system matrices are
F = diagfF2,F2g, ¡ (x) =G¨ (x)
G = diagfG2,G2g, F2 =·1 T
0 1
¸
G2 =·T2=2
T
¸, ¨ (x) =
·c(x) ¡s(x)s(x) c(x)
¸where ¨ (x) is the rotation matrix with
c(x) = cosÁ=_xq_x2 + _y2
, s(x) = sinÁ=_yq_x2 + _y2
that maps ak to the Cartesian coordinates, and Á=arctan(_x= _y) is the target heading angle. A targetmaneuver is described in the model through thecontrol input uk = ¡ (xk)ak.2) Acceleration Densities: Different models of
the acceleration ak can be used [22], depending on themaneuver capabilities of the targets of interest in thetracking application. To be more specific, we developmaneuver detectors for manned maneuvering aircraftin mind.The normal acceleration an(t) is induced by the
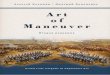
lift forces and is usually the dominant one duringthe maneuver. It can be modeled as an asymmetricfunction an(t) = ®+¯e
°b(t) where ®, ¯, ° are designparameters depending on the particular target type andb(t) is a zero-mean first-order Gauss-Markov process[12], [22]. The marginal pdf, essential for furtherdevelopment of the maneuver detector, can be easilyderived to be (see Appendix III)
f(an) =1p
2¼j°(an¡®)jexp
á 12°2
μlnan¡®¯
¶2!:
(29)For three typical choices of ®, ¯, °, this highlyasymmetrical density is shown in Fig. 1, includingone [(®,¯,°) = (8,¡4,0:5)] that is considered typicalfor piloted aircraft in evasive maneuvers. This modelis more accurate than the usual symmetrical models(e.g., the Singer model) at the cost of choosing theseparameters, which requires knowledge of the targettype, obtained either a priori or a posteriori (e.g., withthe help of an image-sensor-aided target classification)[22].The tangential acceleration is determined by the
thrust-minus-drag force. It is generally smaller inmagnitude and shorter than the normal accelerationforce. This provides us a guideline for scenariodesigns. Various random process models for itsmagnitude are discussed and analyzed in detail in[22]. Most important for our maneuver detectionapproach is the choice of the marginal pdf of theprocess. Purely a priori symmetrical models (such asthe ternary-uniform density in the Singer model) ora posteriori, adaptive (such as the conditional Rayleighdensity in the mean-adaptive “current” model) arepossible candidates. Here we simply use a Gaussianmarginal pdf model
f(at) =N (at; at,¾2t )¢=
1p2¼¾t
expμ¡ (at¡ at)
2
2¾2t
¶(30)
with parameters at, ¾2t either specified a priori (e.g.,
with some nominal values for the targets of interest)or determined a posteriori through filter-basedestimates at = atkjk¡1 ,¾
2t = ¾
2tkjk¡1 . Both cases were
investigated.
542 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

Fig. 1. Asymmetric pdfs of normal acceleration.
Under the assumption of independence betweentangential and normal maneuvers, the pdf of the totalacceleration vector is f(a) = f(at,an) = f(at)f(an):For particular implementation of maneuver detectorsin the sequel it is assumed also that direct positionmeasurements of the target are available, i.e., H =diagf[1 0], [1 0]g in (2).3) Test Statistics: The likelihood of H0 is
available as given by (22).To obtain f(zk jH1,zk¡1), we implement the
marginalization (24) with the acceleration pdf models(29) and (30) by applying Proposition 1 with anappropriate Gaussian-mixture approximation of f(an),as described in Remark 1. Since (28) is a nonlinearsystem we write f(zk jH1,zk¡1)¼ f(zk jH1, xk¡1jk¡1)which amounts to approximating the nonlinear systemby a conditionally linear one.Let gN(an) be a Gaussian-mixture approximation
of f(an)
f(an)¼ gN(an) =NXi=1
¸iN (an; a(i)n ,¾(i)2n ): (31)
For our implementation of maneuver detection weobtained a fairly accurate approximation of theasymmetric f(an) of (29) with a sum of only twocomponents, which is illustrated in Fig. 2. Since atand an are independent, in view of (31) and (30)
1 we
1Note that a Gaussian-mixture approximation can be also applied tof(at) if a non-Gaussian model is adopted.
have for the joint pdf
f(a)¼NXi=1
¸iN (a; a(i),§(i)) (32)
where a(i) = [at, a(i)n ]
0 and §(i) = diagf¾2t ,¾(i)2n g. Thus,according to Proposition 12
f(z jH1, x) =NXi=1
¸i'i(z; x) (33)
where
'i(z; x) =N (z;H¡ (x)a(i),S+H¡ (x)§(i)(H¡ (x))0):(34)
V. PERFORMANCE EVALUATION
A. Comparison of Existing Algorithms
This section presents results of a comprehensivesimulation study of the performance of the maneuverdetection algorithms reviewed in Section III.1) Simulation Scenarios: The target model,
for a 2D state vector in the Cartesian coordinatesx= [x, _x,y, _y]0, is (1) with Fk = FCV, Gk =GCV, whereFCV and GCV are F and G matrices for a constantvelocity motion given by [22, eq. (14)], and wk »N (0,0:0082I). For the measurement model (2)
Hk =·1 0 0 0
0 0 1 0
¸and vk »N (0,352I). Two-point differencing is used toinitialize the Kalman filter.
2We drop the time index to simplify the notation.
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 543

Fig. 2. Gaussian-mixture approximation of asymmetric pdf.
Fig. 3. Simulated trajectories.
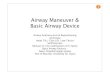
Four scenarios were designed to highlight differentaspects of the detection algorithms. Initially the targetmoves at a nearly constant velocity with the initialstate x0 = [0,0,0,120 m/s]
0. The first scenario (referredto as SM1) represents a relatively simple detectionproblem with a large sudden maneuver–the targetmakes an approximately 2.6 g maneuver duringthe period k = [20,28] with uk = [25 m/s
2,4 m/s2]0.The second (SM2) introduces a much smalleracceleration making it more difficult to detect–thetarget makes an approximately 0.14 g maneuverduring k = [20,25] with uk = [1 m/s
2,1 m/s2]0 andthen increases to approximately 0.26 g with uk =[2 m/s2,1:5 m/s2]0 during k = [26,35]. The thirdscenario (CT) uses a mismatched maneuver model toevaluate the robustness of the detection algorithms
in the presence of structural mismatch–the targetmakes a nearly constant turn maneuver (see [22, eq.(62)]) for k = [20,28] with a turn rate of !k = 3
±=swhich corresponds to a 0.61 g maneuver. Fig. 3illustrates ground truth trajectories from the abovethree scenarios. The sensor is located at the origin.The fourth scenario (RM) is a random scenario,
which allows an overall comparison of the algorithmsunder many different maneuvering scenarios. In theRM scenario huki is assumed to be a random sequencedescribed in polar coordinates as uk = ak 6 μk withmagnitude ak and angle μk. The initial state is alwaysnonmaneuvering (i.e., u0 = 0). The discrete sojourntime that huki stays in nonmaneuvering mode until itjumps to a maneuvering mode un+1 = an+1 6 μn+1 withan+1 6= 0 is random, and has a binomial distributionwith N = 50 and p= 0:5. The transition from un toun+1 is governed by
f(an+1 j an = 0) = 0:6±(an+1)+0:1±(an+1¡ 40)
+0:340U(an+1;(0,40))
f(μn+1 j an = 0) =12¼U(μn+1;(¡¼,¼])
where ± is the delta function, U is the uniformdistribution. The proposed random scenario isimportant in order to verify that a particulardeterministic scenario does not unfairly highlight aspecific artifact of the detection algorithm that mayor may not actually be important in real-life detectionperformance.2) Simulation Results: The performance of the
six detectors described in Section III is compared
544 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

Fig. 4. Onset detection delay for Pfa = 5%.
in terms of average onset detection delay (n¡ n),receiver operating characteristics (ROC) curves,and computational load. Ensemble onset detectionprobability is not given since it is strongly correlatedwith the detection delay. Since maneuver onset time inthe random scenarios is not predefined thus differentfor each realization, it is meaningless to compare thedetection probability at a specific time point as otherdeterministic scenarios did when computing ROCcurves.The MR, IEG, GLR, and CUSUM represent
the detectors discussed in (6), (11), (13), and (16),respectively; IE represents the detector defined inSectionIIIB; and MLR represents an approximatetwo-filter MLR detector developed in [10]. Unlessotherwise stated, all simulation results are basedon 100 Monte Carlo runs using false alarm ratesPfa = f1%,5%g.a) Average detection delay: Fig. 4 shows the
average onset detection delay (n¡ n) under fourscenarios for Pfa = 5%. As previously stated, themaneuver in SM2 is hard to detect due to the smallacceleration applied. It can be seen that all detectorsperformed considerably worse in this scenario than inany others.It is immediately noticeable that MR and MLR
perform worse than all the other detectors in almostall scenarios regardless of the window size. This isespecially clear in more difficult detection scenarios,such as SM2. It appears difficult to generalize therelation between the detection delay and the windowsize from the plots. There is a small trend that alarger window size detects a maneuver more slowly.Intuitively, a larger window requires more data toproperly compute the test statistic. Therefore it showsthat larger windows do not necessarily confer betterperformance in terms of onset detection delay. In the
scenarios considered here, the IE and GLR detectorsoverall performed better than the other techniques.Results for scenarios with Pfa = 1% are reported in
Fig. 5. Longer detection delays were observed for allthe detectors under all the scenarios since a smallerfalse alarm rate causes a larger detection threshold,and then a lower probability of detection.b) ROC curves: The ROC curves for SM1 at
k = 20, : : : ,23 are overlaid in Fig. 6. The ROC curveswere generated by exhaustively computing the Pd atthe time of interest for different Pfas using 250 MonteCarlo runs, each run up to time k = 23. It can beeasily calculated that 250 runs provide a standarddeviation of the estimate of Pd no greater than 0.03.The window size was chosen to be 5 for the detectors.It is interesting to note that the MR detector
performed comparably with the other four detectorsusing input estimates at maneuver onset time (k = 20)and became worse as time goes. This verifies thecontribution of IE to the detection performance dueto the improved accuracy of the IE as more maneuverdata become available. This in turn improves theperformance of the IE-based and GLR detectors. Atk = 21, GLR slightly outperformed other detectorsfor small Pfa (Pfa < 0:25); however, at this early time,no single detector was clearly superior. At k = 22,the CUSUM and GLR had similar performance andoutperformed the other detectors.Note that at k = 23 each detector had a detection
probability very close to 100%. This result isconsistent with the average onset detection delayresults (less than 3 sec for all detectors shown inFig. 4). We noticed that MLR generally performedworse than other detectors for all samples underconsideration.
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 545

Fig. 5. Onset detection delay for Pfa = 1%.
Fig. 6. ROC curves for different detectors in SM1.
546 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

Fig. 7. ROC curves for different detectors in SM2.
Fig. 8. Comparison of CPU time per iteration.
The ROC curves for each maneuver onset detectorat k = 22,24 for SM2 are overlaid in Fig. 7. It showsthat under hard-to-detect maneuvers, MLR and MRdetectors performed more poorly than the otherIE-based detectors.c) Computational complexity: While no serious
attempt was made to optimize each detector beyondthe obvious (e.g., caching matrix inversion results,caching recurring information from sample to sample,and vectorizing operations), the results shown inFig. 8 provide an indicator of relative computationalcomplexity. Since scenario specifics and false alarmrate are irrelevant to the computation time required fordetections, only one plot was shown and the resultscould be applied to all scenarios and false alarm rates.As expected, the MR detector is least
computationally intensive due to its simplicity. TheMLR detector has the heaviest computational load
due to the forward-backward filtering required ateach time [10]. The IE and IEG detectors requiredapproximately the same processing time, as did theGLR and CUSUM detectors. This is because thedetectors in each pair have similar decision functions,while the majority of the processing required goesinto estimating the input. The processing time of allthe detectors except MR increases approximatelylinearly as the window length s increases.
B. Performance of the Proposed Algorithms
The performance of the proposed sequentialmaneuver detectors, developed in Section IV, was alsoevaluated through simulations. All results are averagesover 100 Monte Carlo runs.1) Simulation Scenarios: Four scenarios were
designed to compare different aspects of the detection
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 547

algorithms using ground truth trajectories generatedby a curvilinear-motion model.The standard 2D curvilinear-motion model
_x(t) = v(t)cosÁ(t) +wx(t) (35)
_y(t) = v(t)sinÁ(t) +wy(t) (36)
_v(t) = at(t) +wv(t) (37)
_Á(t) = an(t)=v(t) +wÁ(t) (38)
was used to generate the ground truth trajectories,where (x,y), v, Á denote the target position, speed, andheading. This model is fairly general since it accountsfor along- and cross-track accelerations. The samplinginterval was T = 1 s.The initial state used for each scenario was
generated as
x0 »N (x0,¾2x0 ) x0 = 60 km, ¾x0 = 5 km
y0 »N (y0,¾2y0 ) y0 = 90 km, ¾y0 = 5 km
v0 »N (v0,¾2v0 ) v0 = 300 m/s, ¾v0 = 5 m/s
Á0 »N (Á0,¾2Á0 ) Á0 = 45deg, ¾Á0 = 1deg
with
¾wx = 5 m, ¾wy = 5 m
¾wv = 1 m/s, ¾wÁ = 0:01deg :
Both deterministic and random scenarios weresimulated.(DN) Deterministic normal acceleration scenario.
The target makes a normal maneuver during theperiod k = [80,100] with a magnitude of 20 m/s2.(DT) Deterministic tangential acceleration scenario.
The target makes a tangential maneuver during theperiod k = [80,100] with a magnitude of 20 m/s2.(RN) Random normal acceleration scenario. The
magnitude of the normal acceleration was fixed duringk = [80,100] but random over runs: an » f(an) asgiven by (29) with (®,¯,°) = (4,¡2,0:5).Fig. 9 illustrates ground truth trajectories from DN
and DT.2) Simulation Results: There were some
parameters to be designed. The threshold for eachdetector was determined by simulations with givenfalse alarm rate Pfa = 1%. Two-point differencing wasused to initialize the Kalman filter in state estimation.The corresponding noise covariances were Q = (0:5)2Iand R = (50)2I.For the SSPRT detector, the prior probability for
H0 being true was 0.99 and transition probability¼ from H0 to H1 was 0.005. In addition, the priorpdfs for testing normal accelerations used by theCUSUM and the SSPRT detectors were f(at) =N (at;0,(0:5 g)2) and f(an)¼ 0:44N (an;0:65 g,(1:3 g)2)+0:56N (an;2:2 g,(0:6 g)2) determinedby a local fit. Such a design is obviously better to
Fig. 9. Simulated trajectories.
detect normal maneuvers since prior f(at) will notaffect normal accelerations much. It is possible todesign a model with prior densities particularlygood for tangential accelerations. In this paper,we design f(at) =N (at;0,(3:5 g)2) and f(an) withzero mean and very small variance to test tangentialaccelerations. We could have different design ifwe had better prior information for the tangentialaccelerations. For targets with both maneuvers,naturally we consider combination with two or moremodels [30].For comparison the MR and IE detectors were
also implemented. The MR-based detectors aremost widely used in practice and provide a baselineperformance for comparison. On the other hand,the IE-based detector showed a superior detectionperformance as compared with the other traditionaldetectors in most of our simulations presented inSection VA. The size of data window used in MRand IE detectors was 5. The performance of thefour detectors was compared in terms of averageonset detection delay (n¡n), ROC curves andcomputational load. More details can be found in [28],[29] and [27].a) Average onset detection delay: The average
onset detection delay under four scenarios is shownin Table I. It is clear that SSPRT detectors havesmaller detection delay in both scenarios with normalaccelerations as well as tangential acceleration. For thecases of tangential acceleration, the performance ofthe CUSUM and SSPRT detectors should be improvedif we have the proper prior knowledge of tangentialaccelerations.Furthermore, the SSPRT detector also provides
the posterior probability of a maneuver. The posteriorhypothesis probability for scenario DN is shown inFig. 10. Note that the posterior probability of H1quickly increases after the maneuver onset. Similarresults were observed for scenario DT.
548 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

TABLE IAverage of Maneuver Onset Detection Delay
n¡ n DN RN DT
CUSUM 5.33 5.57 5.75SSPRT 4.68 4.69 5.10MR 5.19 5.12 5.15IE 5.04 5.03 5.11
Fig. 10. Posterior probability: normal accelerations change atk = 80.
Fig. 11. ROC curves for scenario DN at k = 83.
b) ROC curves: The ROC curves fordeterministic normal acceleration scenarios weregenerated by computing the Pd at the time of interestwith different Pfa using 100 Monte Carlo runs. TheROC curves for each maneuver onset detector atk = 83 and k = 84 for scenario DN are given inFig. 11 and Fig. 12, respectively. It is apparent fromthe curves that SSPRT has the best performance fortested scenarios. The CUSUM detector outperformsIE and MR detectors for scenario DN with Pfa > 0:2.Note that IE performed better as time goes due tothe improved accuracy of the IE as more maneuverdata become available. For the scenario DT, shownin Fig. 13 for ROC curve at k = 83, IE and SSPRThave compatible performance when Pfa is really small.
Fig. 12. ROC curves for scenario DN at k = 84.
Fig. 13. ROC curves for scenario DT at k = 83.
TABLE IIComputational Complexity of Different Algorithms
CPU(s) MR CUSUM SSPRT IE
1 2.97 3.27 7.61
Clearly, the ROC curves verify what we observed formaneuver onset detection delay.c) Computational complexity: The relative
computational complexities of different algorithmsin terms of the ratio of the CPU processingtime per iteration are given in Table II. It showsthat the proposed detection algorithms have amuch less computational load than the IE-basedalgorithms.
VI. SUMMARY AND CONCLUSIONS
This paper has studied the important problem ofdetecting a target maneuver’s onset.A comprehensive simulation study of the six most
commonly used maneuver onset detectors has been
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 549

conducted and a comparison of their performance hasbeen made. The results of this study have led to thefollowing conclusions.In general, the IE, IEG, GLR, and CUSUM
detectors outperform the MR and MLR detectors.These four detectors have comparable performance,which is, however, scenario dependent. The proposedrandom scenario produces results more typical ofactual operation in the field.Even though IE and GLR focus on estimation
and detection respectively, the IE component isessentially the same since the maximum likelihoodand least-squares estimators are the same under thelinear-Gaussian assumption. For this reason, theyperform about the same, since only the decisionfunctions are different.The MLR detector performed poorly, which might
be due to the fact that it did not use prior information.With a better prior knowledge or unknown noisecovariance, the marginalization technique for the MLRdetector may have improved performance.The onset detection delay is not strongly related
to the window length for all the detectors underconsideration. The detection delay may actuallyget longer for a larger window (even though theparameter estimate improves). If the window is toosmall, decisions are poor. If the window is long,decisions are better. However, this increases thedetection delay until enough data has filled the slidingwindow. The best choice of the window length is nodoubt scenario dependent.Based on our study, the traditional maneuver
onset detectors based on simplistic models need tobe improved. Further, all detectors require some batch(window) processing and thus are computationallydemanding. Better maneuver detectors can bedesigned by employing more advanced, sequentialstatistical tests for change point detection. Formaneuver detection, sequential testing procedures areactually preferable.Two target maneuver onset detectors based on
sequential tests have been proposed. The CUSUMtype and SSPRT tests for composite hypothesishave been developed by utilizing a likelihoodmarginalization technique to cope with the difficultythat target maneuver accelerations are unknown.Both the CUSUM and SSPRT detection algorithmsdeveloped are explicit, recursive, and general. Theproposed marginalization technique gives explicitsolutions for Gaussian-mixture prior distributions, andcan be applied to arbitrary prior distributions throughGaussian-mixture approximations. The approachutilizes a priori information about the maneuveraccelerations in typical tracking engagements andthus allows to improve the detection performance,especially for normal accelerations, as compared withtwo widely used maneuver onset detectors. Simulationresults have demonstrated the improved capabilitiesof the proposed maneuver onset detectors in variousscenarios designed for different aspects of maneuvers.
APPENDIX I
PROOF OF PROPOSITION 1 Let Hi1 denote hypothesis
H1 with u»N (ui,§i), i= 1, : : :N. From the totalprobability theorem and (25) we have
f(zk jH1,zk¡1) =NXi=1
f(zk jHi1,z
k¡1)PfHi1 j zk¡1g
=NXi=1
¸i'i(zk)
where
'i(zk)¢=f(zk jHi
1,zk¡1): (39)
By definition
zk = zk ¡HkFk¡1xk¡1jk¡1:Under H1
zk =Hk(Fk¡1xk¡1 +Gk¡1uk¡1 +wk¡1)+ vk
and then
zk = zk ¡HkFk¡1xk¡1jk¡1=Hk(Fk¡1(xk¡1¡ xk¡1jk¡1)+wk¡1)+HkGk¡1uk¡1 + vk: (40)
Under Hi1 it follows from (40), and the
assumptions of the model (1)—(2), that zk is Gaussian,i.e., 'i(zk) as defined by (39) is Gaussian.Furthermore, by direct calculation from (40) we
have
E[zk jHi1,z
k¡1] =HkGk¡1ui (41)
cov[zk jHi1,z
k¡1] =Hk(Fk¡1Pk¡1jk¡1F0k¡1 +Qk¡1)H
0k
+Rk +HkGk¡1§i(HkGk¡1)0
= Sk +HkGk¡1§i(HkGk¡1)0: (42)
Thus, it follows that 'i(zk) is given by (27).
APPENDIX II
If the prior distribution f(u) in (24) is unknownit is often assumed to be uniform. Computation off(zk jH1,zk¡1) in such cases can be facilitated by thefollowing.If
f(u) =
( 1¢
if ui,min · ui · ui,max, i= 1, : : :n0 otherwise
where u¢=[u1, : : : ,un]
0, umin¢=[u1,min, : : : ,un,min]
0,
umax¢=[u1,max, : : : ,un,max]
0, ¢¢=Qni=1(ui,max¡ ui,min)> 0,
550 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

and HG is nonsingular then the likelihood f(zk jH1,zk¡1) is given by
f(zk jH1,zk¡1) =1
¢jHGjnYi=1
[©(»i,min)¡©(»i,max)]
(43)where ©(x)
¢=(1=
p2¼)
R x¡1 e
¡t2=2dt, and
[»1,min, : : : ,»n,min]0 = »min = S
¡1=2(zk ¡HGumin)[»1,max, : : : ,»n,max]
0 = »max = S¡1=2(zk ¡HGumax):
PROOF We have
f(zk jH1,zk¡1)
=Zf(z jH1(u),zk¡1)f(u)du
=1¢
Z umax
umin
N (zk;HGu,Sk)du
=1¢
Z umax
umin
1pj2¼Sje¡(zk¡HGu)0S¡1k (zk¡HGu)=2du:(44)
Let » = S¡1=2(z¡HGu) (drop the time index forsimplicity). Then (44) becomes
f(zk jH1,zk¡1)
=¡ 1¢jHGj
Z »max
»min
1³p2¼´n e¡»0»=2d»
=¡ 1¢jHGj
Z »1,max
»1,min
: : :
Z »n,max
»n,min
1³p2¼´n e¡»0»=2d»
=¡ 1¢jHGj
nYi=1
Z »i,max
»i,min
1p2¼e¡»
2i=2d»i
=1
¢jHGjnYi=1
[©(»i,min)¡©(»i,max)]:
APPENDIX III
PROOF OF (29) Note the following theorem [19]: thepdf fY(y) of Y = g(X) can be determined from the pdffX(x) of X by
fY(y) =Xi
fX(xi)jg0(xi)j
where g0(x) = (d=dx)g(x) and xis are the real roots ofthe equation y = g(x) in terms of y: y = g(xi).Let g(b) = ®+¯e°b. Then g0(b) = ¯°e°b. The root
of an = ®+¯e°b is b1 = (1=°) ln(an¡®)=¯. Thus we
have (29)
f(an) =f(b1)jg0(b1)j
=Nμ1°lnan¡®¯
;0,1¶
j°(an¡®)j
=1p
2¼j°(an¡®)jexp
"¡ 12°2
μlnan¡®¯
¶2#:
REFERENCES
[1] Bar-Shalom, Y., and Birmiwal, K.Variable dimension filter for maneuvering target tracking.IEEE Transactions on Aerospace and Electronic Systems,AES-18, 5 (Sept. 1982), 621—629.
[2] Bar-Shalom, Y., and Li, X. R.Estimation and Tracking: Principles, Techniques, andSoftware.Boston, MA: Artech House, 1993. (Reprinted by YBSPublishing, 1998).
[3] Bar-Shalom, Y., Li, X. R., and Kirubarajan, T.Estimation with Applications to Tracking and Navigation:Theory, Algorithms, and Software.New York: Wiley, 2001.
[4] Basseville, M., and Nikiforov, I.Detection of Abrupt Changes: Theory and Application.Englewood Cliffs, NJ: Prentice-Hall, 1993.
[5] Bekir, E.Adaptive Kalman filter for tracking maneuvering targets.AIAA Journal of Guidance, 6, 5 (Sept.—Oct. 1983),414—416.
[6] Blackman, S. S.Multiple Target Tracking with Radar Applications.Norwood, MA: Artech House, 1986.
[7] Blackman, S. S., and Popoli, R. F.Design and Analysis of Modern Tracking Systems.Norwood, MA: Artech House, 1999.
[8] Bogler, P. L.Tracking a maneuvering target using input estimation.IEEE Transactions on Aerospace and Electronic Systems,AES-23, 3 (May 1987), 298—310.
[9] Cloutier, J. R., Lin, C. F., and Yang C.Maneuvering target tracking via smoothing and filteringthrough measurement concatenation.AIAA Journal of Guidance, Control, and Dynamics, 16, 2(Mar.—Apr. 1993), 377—384.
[10] Gustafsson, F.The marginalized likelihood test for detecting abruptchanges.IEEE Transactions on Automatic Control, 41 (Jan. 1996),66—78.
[11] Gustafsson, F.Adaptive Filtering and Change Detection.New York: Wiley, 2001.
[12] Kendrick, J. D., Maybeck, P. S., and Reid, J. G.Estimation of aircraft target motion using orientationmeasurements.IEEE Transactions on Aerospace and Electronic Systems,AES-17, 2 (Mar. 1981), 254—260.
[13] Kolda, T. G., Lewis, R. M., and Torczon, V.Optimization by direct search: New perspectives on someclassical and modern methods.SIAM Review, 45, 3 (2003), 385—482.
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 551

[14] Korn, J., Gully, S. W., and Willsky, A. S.Application of the generalized likelihood ratio algorithmto maneuver detection and estimation.In Proceedings of the 1982 American Control Conference,Arlington, VA, June 1982, 792—798.
[15] Lai, T. L.Sequential multiple hypothesis testing and efficient faultdetection-isolation in stochastic systems.IEEE Transactions on Information Theory, 46, 2 (Mar.2000), 595—608.
[16] Lai, T. L., and Shan, J. Z.Efficient recursive algorithms for detection of abruptchanges in signals and controls systems.IEEE Transactions on Automatic Control, 44, 5 (May1999), 952—966.
[17] Lee, H., and Tahk, M.-J.Generalized input-estimation technique for trackingmaneuvering targets.IEEE Transactions on Aerospace and Electronic Systems,35, 4 (1999), 1388—1402.
[18] Lee, S.-C., and Liu, C.-Y.Trajectory estimation of reentry vehicle by use of on-lineinput estimator.Journal of Guidance, Control, and Dynamics, 22, 6 (1999),808—815.
[19] Li, X. R.Probability, Random Signals, and Statistics.Boca Raton, FL: CRC Press, 1999.
[20] Li, X. R.Multiple-model estimation with variable structure–PartII: Model-set adaptation.IEEE Transactions on Automatic Control, 45, 11 (Nov.2000), 2047—2060.
[21] Li, X. R., and Jilkov, V. P.A survey of maneuvering target tracking–Part IV:Decision-based methods.In Proceedings of 2002 SPIE Conference on Signal andData Processing of Small Targets, vol. 4728, Orlando, FL,Apr. 2002, 511—534.
[22] Li, X. R., and Jilkov, V. P.Survey of maneuvering target tracking. Part I: Dynamicmodels.IEEE Transactions on Aerospace and Electronic Systems,39, 4 (Oct. 2003), 1333—1364.
[23] Malladi, D. P., and Speyer, J. L.A generalized Shiryaev sequential probability ratio testfor change detection and isolation.IEEE Transactions on Automatic Control, AC-44, 8 (1999),1522—1534.
[24] Nikiforov, I. V.A simple recursive algorithm for diagnosis of abruptchanges in random signals.IEEE Transactions on Information Theory, 46, 7 (2000),2740—2746.
[25] Nikiforov, I. V.Optimal sequential change detection and isolation.In Proceedings of 15th IFAC Word Congress, Barcelona,Spain, July 2002.
[26] Nikiforov, I. V.A lower bound for the detection/isolation delay in a classof sequential tests.IEEE Transactions on Information Theory, 49, 11 (2003),3037—3047.
[27] Ru, J.-F.Adaptive estimation and detection techniques withapplications.Ph.D. dissertation, University of New Orleans, NewOrleans, LA, July 2005.
[28] Ru, J.-F., Bashi, A., and Li, X. R.Performance comparison of target maneuver onsetdetection algorithms.In Proceedings of 2004 SPIE Conference on Signal andData Processing of Small Targets, vol. 5428, 2004,419—428.
[29] Ru, J.-F., Jilkov, V. P., Li, X. R., and Bashi, A.Sequential detection of target maneuvers.In Proceedings of 2005 International Conference onInformation Fusion, Philadelphia, PA, July 2005,345—351.
[30] Ru, J.-F., Li, X. R., and Jilkov, V. P.Multiple model detection of target maneuvers.In Proceedings of 2005 SPIE Conference on Signal andData Processing of Small Targets, vol. 5913, San Diego,CA, Aug. 2005, 59130A.
[31] Schnepper, K.A comparison of GLR and multiple model filters for atarget tracking problem.In Proceedings of the 25 Conference on Decision andControl, Athens, Greece, Dec. 1986, 666—670.
[32] Sorenson, H. W., and Alspach, D. L.Recursive Bayesian estimation using Gaussian sums.Automatica, 7 (1971), 465—479.
[33] Speyer, J. L., and White, J. E.Shiryaev sequential probability ratio test for redundancymanagement.AIAA Journal of Guidance, Control, and Dynamics, 7, 5(1984), 588—595.
[34] Sung, T. K., and Lee, J. G.A decoupled adaptive tracking filter for real applications.IEEE Transactions on Aerospace and Electronic Systems,33, 3 (1997), 1025—1030.
[35] Wang, T. C., and Varshney, P. K.A tracking algorithm for maneuvering targets.IEEE Transactions on Aerospace and Electronic Systems,29, 3 (July 1993), 910—924.
[36] Willsky, A. S.A survey of design methods for failure detection indynamic systems.Automatica, 12, 6 (Nov. 1976), 601—611.
[37] Willsky, A. S., and Jones, H. L.A generalized likelihood ratio approach to stateestimation in linear systems subject to abrupt changes.In Proceedings of 1974 IEEE Conference on Decision andControl, Nov. 1974, 846—853.
552 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009

Jifeng Ru received the B.S. and M.S. degrees from Hefei University ofTechnology, P.R. China, in 1996 and 1999, respectively, and the Ph.D. degreefrom the University of New Orleans, LA, in 2005.She is currently a senior engineer in the air traffic system division at Arcon
Corporation, Waltham, MA. Her research interests are in statistical signalprocessing, estimation and detection theory, fault detection and diagnosis, targettracking, and data fusion.
Vesselin P. Jilkov (M’01) received his B.S. and M.S. degree in mathematicsfrom the University of Sofia, Bulgaria in 1982, the Ph.D. degree in the technicalsciences in 1988, and the academic rank Senior Research Fellow of the BulgarianAcademy of Sciences in 1997.He was a research scientist with the R&D Institute of Special Electronics,
Sofia, (1982—1988) where he was involved in research and development of radartracking systems. From 1989 to 1999 he was a Research Fellow with the Instituteof Parallel Processing–Bulgarian Academy of Sciences, Sofia, where he workedas a key researcher in numerous academic and industry projects (includinginternational) in the areas of estimation, target tracking, sensor data fusion, andparallel processing. In 1999 he joined the Department of Electrical Engineering,University of New Orleans, as a visiting scholar. Since 2003 Dr. Jilkov has beenan assistant professor and has been engaged in teaching and conducting researchin the areas of hybrid estimation and target tracking. His current research interestsinclude stochastic systems, nonlinear filtering, applied estimation, target tracking,information fusion.Dr. Jilkov is author/coauthor of over 75 journal articles and conference papers.
He is also a member of ISIF (International Society of Information Fusion), SIAM(Society of Industrial and Applied Mathematics), and Phi Beta Delta (HonorsSociety for International Scholars).
RU ET AL.: DETECTION OF TARGET MANEUVER ONSET 553

X. Rong Li (S’90–M’92–SM’95–F’04) received the B.S. and M.S. degreesfrom Zhejiang University, Hangzhou, Zhejiang, PRC, in 1982 and 1984,respectively, and the M.S. and Ph.D. degrees from the University of Connecticut,Storrs, in 1990 and 1992, respectively.He joined the Department of Electrical Engineering, University of New
Orleans in 1994, where he is now University Research Professor, DepartmentChair, and Director of Information and Systems Technology Research Center.During 1986—1987 he did research on electric power at the University of Calgary,AB, Canada. He was an assistant professor at the University of Hartford, WestHartford, CT, from 1992 to 1994. He has authored or coauthored Estimation andTracking (with Yaakov Bar-Shalom, Artech House, 1993), Multitarget-MultisensorTracking (with Yaakov Bar-Shalom, YBS Publishing, 1995), Probability, RandomSignals, and Statistics (CRC Press, 1999), and Estimation with Applicationsto Tracking and Navigation (with Yaakov Bar-Shalom and T. Kirubarajan,Wiley, 2001); seven book chapters; and more than 200 journal and conferenceproceedings papers. His current research interests include signal and dataprocessing, target tracking, information fusion, stochastic systems, statisticalinference, and electric power.Dr. Li has served the International Society of Information Fusion as president
(2003), vice president (1998—2002) and a member of the Board of Directors(since 1998); served as General Chair for 2002 International Conference onInformation Fusion, and steering chair or general vice-chair for 1998, 1999, and2000 International Conferences on Information Fusion; served IEEE Transactionson Aerospace and Electronic Systems as an associate editor from 1995 to 1996and as editor from 1996 to 2003; served Communications in Information andSystems as an editor since 2001; received a CAREER award and an RIA awardfrom the U.S. National Science Foundation. He received 1996 Early CareerAward for Excellence in Research from the University of New Orleans and hasgiven numerous seminars and short courses in North America, Europe, Asia, andAustralia. He won several outstanding paper awards, is listed in Marquis’ Who’sWho in America and Who’s Who in Science and Engineering, and consulted forseveral companies.
Anwer Bashi received his B.Sc. and M.Sc. in electrical engineering from theUniversity of New Orleans, New Orleans, LA, in 1996 and 1998, respectively.He joined Computrols, Inc., a building automation and controls company in
1998, where he worked on adaptive controls and estimation, developing someof the industry’s first adaptive and self-tuning controls systems. He is currentlyemployed at Computrols as a senior research engineer. Over the past few yearsin this position, he has had the opportunity to lead research and developmentin cryptography, wired and wireless communications, distributed processing,database replication, and the use of fuzzy logic, fault diagnosis, and Bayesianreasoning in the building automation industry.
554 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 45, NO. 2 APRIL 2009