Embed Size (px)
Citation preview

Dispense di Fisica Generale 1
Aurelio Agliolo Gallitto
A.A. 2011/2012 (v. 7.1.0)

Indice
1 Cinematica traslazionale 1
1.1 Cifre significative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Somma e differenza di vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.3 Prodotto vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Moti rettilinei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1 Corpi in caduta libera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Moti bidimensionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4.1 Moto del proiettile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4.2 Moti relativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Velocita vettoriale media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Dinamica traslazionale 9
2.1 Leggi di Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Forze di attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Lavoro ed energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Energia potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.2 Relazione tra energia potenziale e forza . . . . . . . . . . . . . . . . . . . . . . 12
2.2.3 Principio di conservazionedell’energia meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Impulso e quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.1 Forze impulsive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.2 Urti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4 Centro di massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4.1 Centro di massa di un sistema di corpi puntiformi . . . . . . . . . . . . . . . . 15
2.4.2 Centro di massa di corpi rigidi omogenei . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Esercizi di ricapitolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Meccanica rotazionale 17
3.1 Cinematica rotazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Relazione vettoriale tra grandezze traslazionali e rotazionali . . . . . . . . . . . . . . . 17
3.3 Dinamica Rotazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3.1 Dinamica del moto circolare uniforme . . . . . . . . . . . . . . . . . . . . . . . 19
3.3.2 Momento d’inerzia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3.3 Conservazione dell’energiameccanica nei moti rotazionali . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
ii INDICE
3.3.4 Conservazione del momentoangolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.5 Moto di precessione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.4 Moto armonico semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.5 Esercizi di ricapitolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Statica 25
5 Meccanica dei fluidi 295.1 Statica dei fluidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.1.1 Legge di Stevino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.2 Dinamica dei fluidi ideali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2.1 Equazione di Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.3 Dinamica dei fluidi reali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.3.1 Viscosita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.3.2 Equazione di Poiseuille . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.3.3 Legge di Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.3.4 Moto laminare e moto turbolento: numero di Reynolds . . . . . . . . . . . . . 35
6 Termodinamica 376.1 Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376.2 Temperatura e principio zero della termodinamica . . . . . . . . . . . . . . . . . . . . 38
6.2.1 Espansione termica dei corpi solidi . . . . . . . . . . . . . . . . . . . . . . . . . 386.3 Calorimetria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3.1 Capacita termica e calorespecifico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3.2 Conducibilita termica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386.4 Legge dei gas perfetti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406.5 Primo principio della
termodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406.6 Secondo principio della
termodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.6.1 Cicli termodinamici e macchine termiche . . . . . . . . . . . . . . . . . . . . . . 416.6.2 Entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.7 Esercizi di ricapitolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Bibliografia 43
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
Capitolo 1
Cinematica traslazionale
1.1 Cifre significative
Ogni numero e espresso con un determinato nu-mero di cifre, dove per cifra si intende uno deisimboli: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9. Per numero dicifre significative si intende il numero di tutte lecifre scritte, compreso lo 0, a partire da destrafino all’ultima 6= 0 a sinistra.
La cifra meno significativa, cioe l’ulti-ma cifra a destra con cui si scrive unnumero, e quella che indica il grado diprecisione con cui si ritiene di conoscerela grandezza che esso rappresenta.
Per esempio, 4.3 e un numero diverso da 4.30perche per il primo si intende che e maggiore di4.2 e minore di 4.4 mentre per il secondo si in-tende che e maggiore di 4.29 e minore di 4.31.Per valutare meglio il numero di cifre significa-tive di un numero, conviene riportare il numeroin notazione scientifica. Per esempio, il numero0.0010203 in notazione scientifica si scrive come1.0203×10−3 (attenzione, la mantissa, cioe il nu-mero prima della potenza di 10, deve essere com-presa tra 1 e 10); la mantissa individua le cifresignificative, mentre la potenza di 10 individual’ordine di grandezza del numero. In questo caso,il numero 1.0203× 10−3 ha 5 cifre significative eun ordine di grandezza di 10−3.Quando il risultato di una operazione e un nu-mero con molte cifre, bisogna capire con quantecifre bisogna riportare il risultato finale. I valo-ri delle grandezze fisiche vengono generalmenteforniti con non piu di 3 o 4 cifre significative;pertanto, e privo di significato riportare il risul-tato di calcoli eseguiti su tali dati con un numeromaggiore di cifre significative.
Per determinare il numero di cifre significativecon cui bisogna riportare il risultato di una ope-razione algebrica, e opportuno seguire le seguentiregole.
1. Nella somma o sottrazione, il numero di ci-fre decimali del risultato deve essere ugua-le al numero piu piccolo delle cifre deci-mali di ciascun addendo (o sottraendo). Ilnumero di cifre significative non ha alcunaimportanza.
2. Nella moltiplicazione o divisione bisognacontare il numero di cifre significative neimoltiplicandi o dividendi. Il numero di ci-fre significative nel risultato e determinatodal fattore con il minore numero di cifre si-gnificative. La posizione della cifra menosignificativa non ha alcuna importanza.
Occorrera quindi “tagliare” le cifre dopo la ciframeno significativa approssimando, a seconda deicasi, per difetto o per eccesso.
Una cifra si approssima per eccessoquando e maggiore di 5 e si approssi-ma per difetto quando e minore di 5;quando invece e esattamente uguale a 5si puo approssimare per eccesso oppureper difetto in modo tale da ottenere unvalore multiplo di due.
Pertanto, bisogna riportare i risultati numeri-ci con appropriato numero di cifre significati-ve e bisogna specificare le unita di misura dellegrandezze calcolate.
Esercizio 1.1. Approssimare il numero0.0010203 a tre cifre significative.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
2 Capitolo 1. Cinematica traslazionale
Soluzione. Per capire meglio come approssima-re un dato numero conviene riportarlo in nota-zione scientifica. Pertanto, risulta 0.0010203 =1.0203× 10−3 ∼= 1.02× 10−3.
Esercizio 1.2. Si vuole determinare il volumedi una sfera di raggio R = 20.0 cm.
Soluzione. Il volume della sfera e dato da
V =4
3πR3 = 33493.33 cm3 .
Coerentemente con le unita di misura fornite peril raggio, il volume andra espresso in cm3. Seb-bene il risultato del calcolo abbia dato il valore33493.33 cm3, riportare il risultato con tutte lecifre che si leggono sulla calcolatrice e privo disignificato, in quanto il valore del raggio e statofornito con sole tre cifre significative. Seguendola regola della moltiplicazione e divisione, il ri-sultato puo ragionevolmente essere espresso contre cifre significative, ottenendo in questo modoV = 3.35×104 cm3 = 3.35×10 dm3 = 33.5 litri.
1.2 Vettori
1.2.1 Somma e differenza di vettori
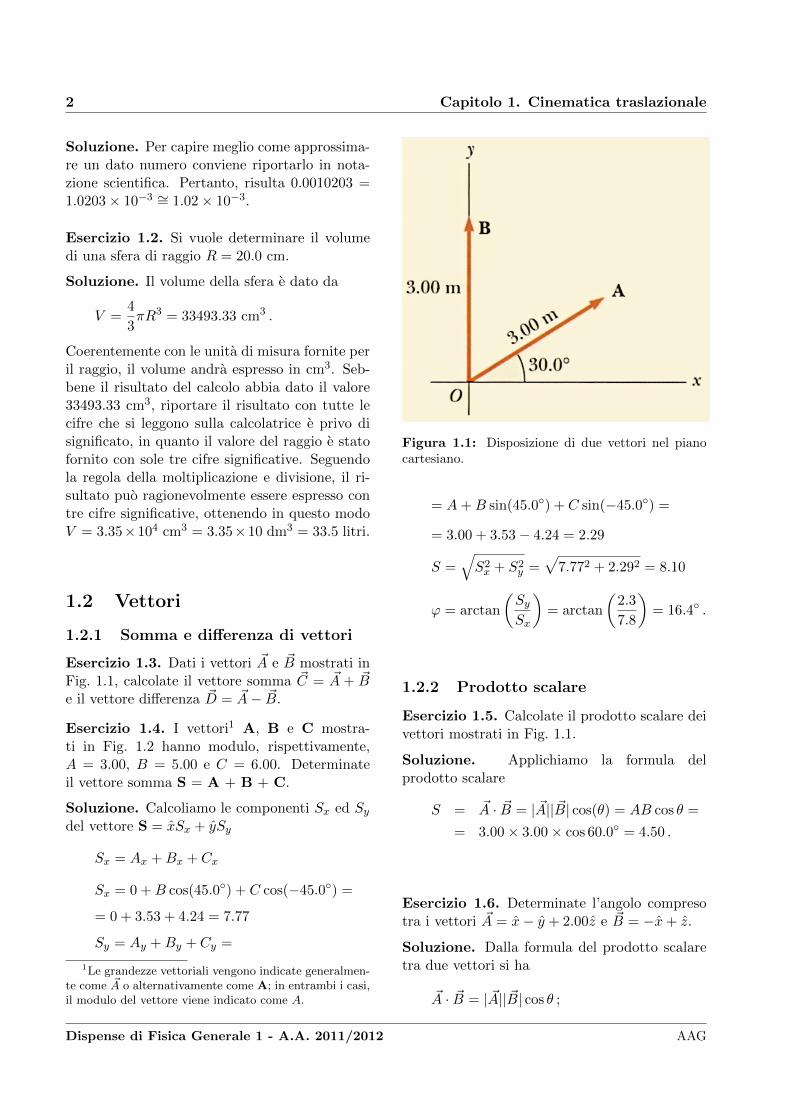
Esercizio 1.3. Dati i vettori ~A e ~B mostrati inFig. 1.1, calcolate il vettore somma ~C = ~A + ~Be il vettore differenza ~D = ~A− ~B.
Esercizio 1.4. I vettori1 A, B e C mostra-ti in Fig. 1.2 hanno modulo, rispettivamente,A = 3.00, B = 5.00 e C = 6.00. Determinateil vettore somma S = A + B + C.
Soluzione. Calcoliamo le componenti Sx ed Sydel vettore S = xSx + ySy
Sx = Ax +Bx + Cx
Sx = 0 +B cos(45.0) + C cos(−45.0) =
= 0 + 3.53 + 4.24 = 7.77
Sy = Ay +By + Cy =
1Le grandezze vettoriali vengono indicate generalmen-te come ~A o alternativamente come A; in entrambi i casi,il modulo del vettore viene indicato come A.
Figura 1.1: Disposizione di due vettori nel pianocartesiano.
= A+B sin(45.0) + C sin(−45.0) =
= 3.00 + 3.53− 4.24 = 2.29
S =√S2x + S2
y =√
7.772 + 2.292 = 8.10
ϕ = arctan
(SySx
)= arctan
(2.3
7.8
)= 16.4 .
1.2.2 Prodotto scalare
Esercizio 1.5. Calcolate il prodotto scalare deivettori mostrati in Fig. 1.1.
Soluzione. Applichiamo la formula delprodotto scalare
S = ~A · ~B = | ~A|| ~B| cos(θ) = AB cos θ =
= 3.00× 3.00× cos 60.0 = 4.50 .
Esercizio 1.6. Determinate l’angolo compresotra i vettori ~A = x− y + 2.00z e ~B = −x+ z.
Soluzione. Dalla formula del prodotto scalaretra due vettori si ha
~A · ~B = | ~A|| ~B| cos θ ;
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

1.3. Moti rettilinei 3
Figura 1.2: Disposizione di tre vettori nel pianocartesiano.
dall’equazione precedente possiamo ricavarel’angolo cercato nel seguente modo
θ = arccos
(~A · ~B| ~A|| ~B|
)=
=AxBx +AyBy +AzBz
| ~A|| ~B|= 30.0 .
1.2.3 Prodotto vettoriale
Esercizio 1.7. Dati tre vettori ~A = 2.00 x+ y,~B = x + 3.00 z e ~C = 2.00 y − z. Calcolare ilvettore ~D = ( ~A− ~B) ∧ ~C.
Soluzione. Calcoliamo dapprima il vettore~A− ~B e successivamente il vettore ~D applicandola regola del prodotto vettoriale. Il risultato e
~A− ~B = x+ 3.00y − 3.00z ,
( ~A− ~B) ∧ ~C = 2.00x+ y + 2.00z .
Esercizio 1.8. Dati due vettori A = 2.00 i +j − 3.00 k e B = i − 2.00 j + k. Determinare ilvettore C di modulo 5.20 e perpendicolare ad Ae B.
Soluzione. Il vettore che dobbiamo determina-re deve essere perpendicolare a entrambi i vetto-ri ~A e ~B e deve essere parallelo al vettore datodal prodotto vettoriale ~C = ~A ∧ ~B e di modulo5.20. Allora, troviamo il vettore ~C e imponiamola seguente condizione
~C1,2 = ±5.20~C
|~C|.
Otteniamo, quindi, i seguenti vettori
~C1 = 3.00i+ 3.00j + 3.00k ,
~C2 = −(3.00i+ 3.00j + 3.00k) .
1.3 Moti rettilinei
Esercizio 1.9. Un punto materiale percorreuno spazio S1 = 100 m in 10.0 s e successi-vamente percorre uno spazio S2 = 300 m in70.0 s. Calcolare la velocita media v del puntomateriale.
Soluzione. Per calcolare la velocita media biso-gna calcolare lo spazio totale percorso dal pun-to e il tempo totale impiegato a percorrere talespazio
v =S1 + S2
∆t1 + ∆t2=
400
80.0= 5.00 m/s .
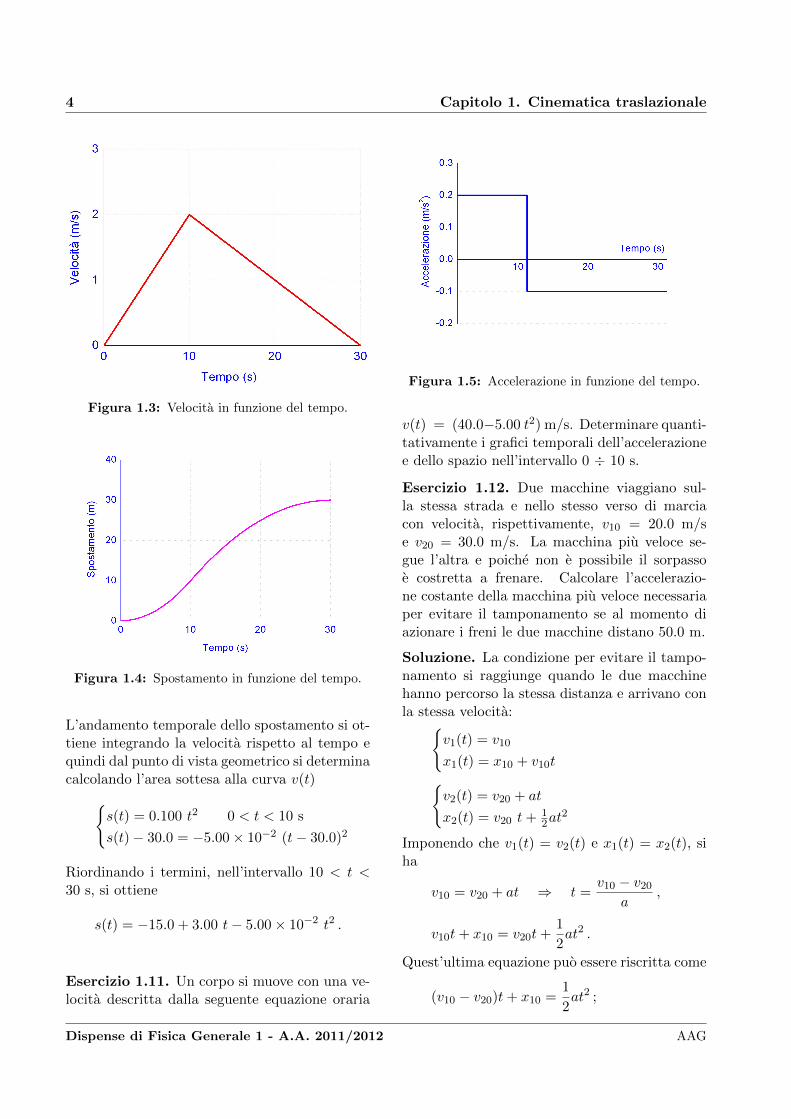
Esercizio 1.10. Un oggetto puntiforme si muo-ve di moto rettilineo. L’andamento temporaledella velocita del punto e descritto dal grafico diFig. 1.3. Determinare l’andamento dello sposta-mento e dell’accelerazione in funzione del tempo.
Soluzione. Gli andamenti temporali dello spo-stamento e dell’accelerazione sono descritti daigrafici riportati in Fig. 1.4 e in Fig. 1.5.L’andamento temporale dell’accelerazione si ot-tiene derivando la velocita in funzione del tem-po e quindi dal punto di vista geometrico sidetermina calcolando la tangente alla curva v(t)a(t) = 2.00
10.0 = 0.200 m/s2 0 < t < 10 s
a(t) = −2.0020.0 = −0.100 m/s2 10 < t < 30 s
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
4 Capitolo 1. Cinematica traslazionale
Figura 1.3: Velocita in funzione del tempo.
Figura 1.4: Spostamento in funzione del tempo.
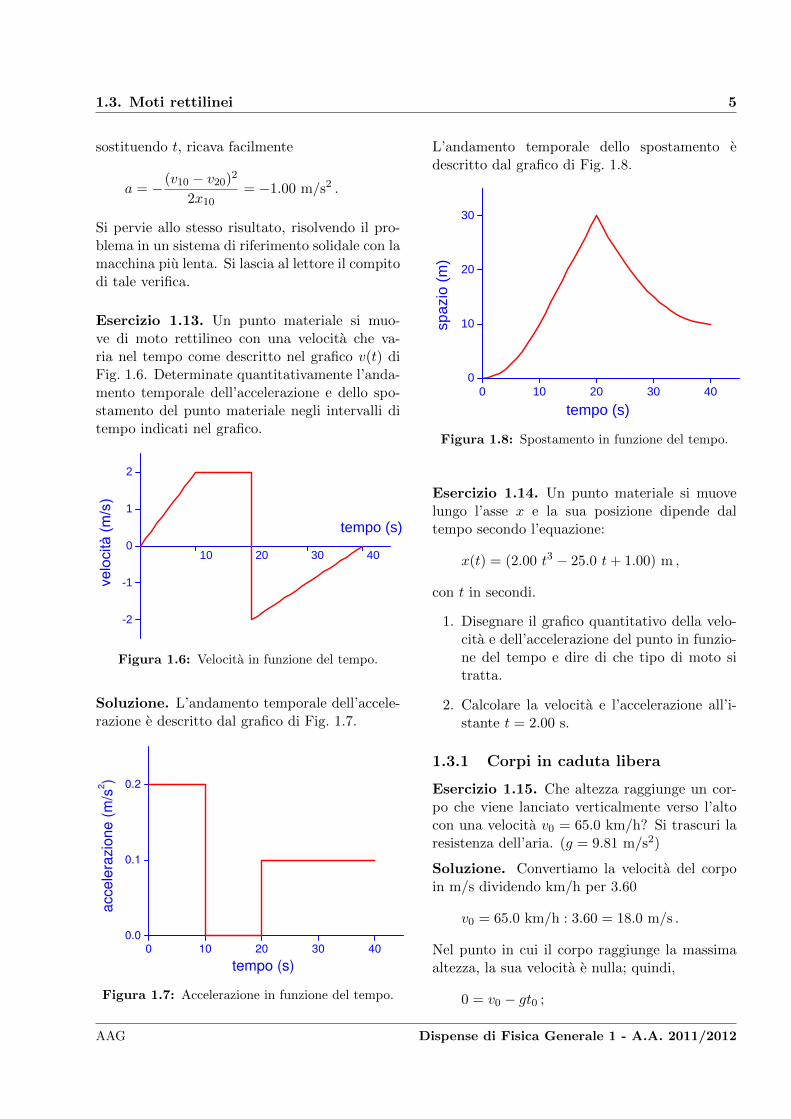
L’andamento temporale dello spostamento si ot-tiene integrando la velocita rispetto al tempo equindi dal punto di vista geometrico si determinacalcolando l’area sottesa alla curva v(t)
s(t) = 0.100 t2 0 < t < 10 s
s(t)− 30.0 = −5.00× 10−2 (t− 30.0)2
Riordinando i termini, nell’intervallo 10 < t <30 s, si ottiene
s(t) = −15.0 + 3.00 t− 5.00× 10−2 t2 .
Esercizio 1.11. Un corpo si muove con una ve-locita descritta dalla seguente equazione oraria
Figura 1.5: Accelerazione in funzione del tempo.
v(t) = (40.0−5.00 t2) m/s. Determinare quanti-tativamente i grafici temporali dell’accelerazionee dello spazio nell’intervallo 0 ÷ 10 s.
Esercizio 1.12. Due macchine viaggiano sul-la stessa strada e nello stesso verso di marciacon velocita, rispettivamente, v10 = 20.0 m/se v20 = 30.0 m/s. La macchina piu veloce se-gue l’altra e poiche non e possibile il sorpassoe costretta a frenare. Calcolare l’accelerazio-ne costante della macchina piu veloce necessariaper evitare il tamponamento se al momento diazionare i freni le due macchine distano 50.0 m.
Soluzione. La condizione per evitare il tampo-namento si raggiunge quando le due macchinehanno percorso la stessa distanza e arrivano conla stessa velocita:
v1(t) = v10
x1(t) = x10 + v10tv2(t) = v20 + at
x2(t) = v20 t+ 12at
2
Imponendo che v1(t) = v2(t) e x1(t) = x2(t), siha
v10 = v20 + at ⇒ t =v10 − v20
a,
v10t+ x10 = v20t+1
2at2 .
Quest’ultima equazione puo essere riscritta come
(v10 − v20)t+ x10 =1
2at2 ;
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
1.3. Moti rettilinei 5
sostituendo t, ricava facilmente
a = −(v10 − v20)2
2x10= −1.00 m/s2 .
Si pervie allo stesso risultato, risolvendo il pro-blema in un sistema di riferimento solidale con lamacchina piu lenta. Si lascia al lettore il compitodi tale verifica.
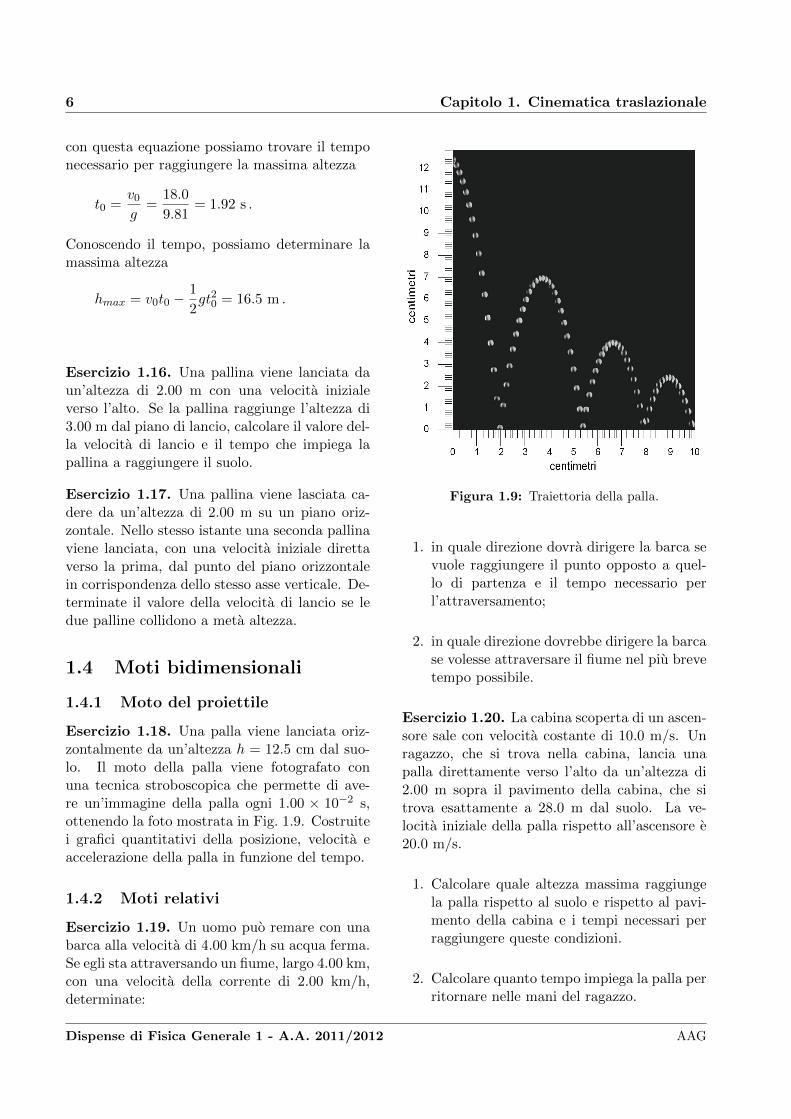
Esercizio 1.13. Un punto materiale si muo-ve di moto rettilineo con una velocita che va-ria nel tempo come descritto nel grafico v(t) diFig. 1.6. Determinate quantitativamente l’anda-mento temporale dell’accelerazione e dello spo-stamento del punto materiale negli intervalli ditempo indicati nel grafico.
1 0 2 0 3 0 4 0
- 2
- 1
0
1
2
t e m p o ( s )
Figura 1.6: Velocita in funzione del tempo.
Soluzione. L’andamento temporale dell’accele-razione e descritto dal grafico di Fig. 1.7.
0 10 20 30 400.0
0.1
0.2
acce
lera
zion
e (m
/s2 )
tempo (s)
Figura 1.7: Accelerazione in funzione del tempo.
L’andamento temporale dello spostamento edescritto dal grafico di Fig. 1.8.
0 1 0 2 0 3 0 4 00
1 0
2 0
3 0
spaz
io (m
)t e m p o ( s )
Figura 1.8: Spostamento in funzione del tempo.
Esercizio 1.14. Un punto materiale si muovelungo l’asse x e la sua posizione dipende daltempo secondo l’equazione:
x(t) = (2.00 t3 − 25.0 t+ 1.00) m ,
con t in secondi.
1. Disegnare il grafico quantitativo della velo-cita e dell’accelerazione del punto in funzio-ne del tempo e dire di che tipo di moto sitratta.
2. Calcolare la velocita e l’accelerazione all’i-stante t = 2.00 s.
1.3.1 Corpi in caduta libera
Esercizio 1.15. Che altezza raggiunge un cor-po che viene lanciato verticalmente verso l’altocon una velocita v0 = 65.0 km/h? Si trascuri laresistenza dell’aria. (g = 9.81 m/s2)
Soluzione. Convertiamo la velocita del corpoin m/s dividendo km/h per 3.60
v0 = 65.0 km/h : 3.60 = 18.0 m/s .
Nel punto in cui il corpo raggiunge la massimaaltezza, la sua velocita e nulla; quindi,
0 = v0 − gt0 ;
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
6 Capitolo 1. Cinematica traslazionale
con questa equazione possiamo trovare il temponecessario per raggiungere la massima altezza
t0 =v0g
=18.0
9.81= 1.92 s .
Conoscendo il tempo, possiamo determinare lamassima altezza
hmax = v0t0 −1
2gt20 = 16.5 m .
Esercizio 1.16. Una pallina viene lanciata daun’altezza di 2.00 m con una velocita inizialeverso l’alto. Se la pallina raggiunge l’altezza di3.00 m dal piano di lancio, calcolare il valore del-la velocita di lancio e il tempo che impiega lapallina a raggiungere il suolo.
Esercizio 1.17. Una pallina viene lasciata ca-dere da un’altezza di 2.00 m su un piano oriz-zontale. Nello stesso istante una seconda pallinaviene lanciata, con una velocita iniziale direttaverso la prima, dal punto del piano orizzontalein corrispondenza dello stesso asse verticale. De-terminate il valore della velocita di lancio se ledue palline collidono a meta altezza.
1.4 Moti bidimensionali
1.4.1 Moto del proiettile
Esercizio 1.18. Una palla viene lanciata oriz-zontalmente da un’altezza h = 12.5 cm dal suo-lo. Il moto della palla viene fotografato conuna tecnica stroboscopica che permette di ave-re un’immagine della palla ogni 1.00 × 10−2 s,ottenendo la foto mostrata in Fig. 1.9. Costruitei grafici quantitativi della posizione, velocita eaccelerazione della palla in funzione del tempo.
1.4.2 Moti relativi
Esercizio 1.19. Un uomo puo remare con unabarca alla velocita di 4.00 km/h su acqua ferma.Se egli sta attraversando un fiume, largo 4.00 km,con una velocita della corrente di 2.00 km/h,determinate:
Figura 1.9: Traiettoria della palla.
1. in quale direzione dovra dirigere la barca sevuole raggiungere il punto opposto a quel-lo di partenza e il tempo necessario perl’attraversamento;
2. in quale direzione dovrebbe dirigere la barcase volesse attraversare il fiume nel piu brevetempo possibile.
Esercizio 1.20. La cabina scoperta di un ascen-sore sale con velocita costante di 10.0 m/s. Unragazzo, che si trova nella cabina, lancia unapalla direttamente verso l’alto da un’altezza di2.00 m sopra il pavimento della cabina, che sitrova esattamente a 28.0 m dal suolo. La ve-locita iniziale della palla rispetto all’ascensore e20.0 m/s.
1. Calcolare quale altezza massima raggiungela palla rispetto al suolo e rispetto al pavi-mento della cabina e i tempi necessari perraggiungere queste condizioni.
2. Calcolare quanto tempo impiega la palla perritornare nelle mani del ragazzo.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

1.5. Velocita vettoriale media 7
1.5 Velocita vettoriale media
L’espressione velocita scalare media si riferiscea quanto lontano arriva un oggetto in un certointervallo di tempo, senza tenere conto della di-rezione. Se un’auto percorre 240 km in 3.00 h,noi diciamo che la sua velocita scalare media e di80.0 km/h. In generale, la velocita scalare mediadi un oggetto e definita come la distanza percor-sa durante il suo cammino divisa per il tempoche impiega a percorrere tale distanza
velocita scalare media =distanza percorsa
tempo trascorso.
Nel linguaggio comune si parla semplicemente divelocita: in fisica, invece, si deve distinguere travelocita vettoriale e velocita scalare. La velocitascalare e un numero positivo espresso in una cer-ta unita di misura. L’espressione velocita vetto-riale, invece, e usata per indicare il modulo (valo-re numerico), cioe il numero che esprime quantorapidamente vari la posizione dell’oggetto che sista muovendo, e la direzione in cui si sta muo-vendo (la velocita vettoriale e quindi, come diceil nome, un vettore).
C’e una seconda differenza tra i due concetti: lavelocita vettoriale media e definita in termini dispostamento anziche di distanza totale percorsa:
velocita vettoriale media =spostamento
tempo trascorso=
=posizione finale− posizione iniziale
tempo trascorso.
La velocita scalare media e la velocita vettorialemedia hanno lo stesso modulo (lo stesso valorenumerico) quando il moto si svolge tutto in unasola direzione. In altri casi, possono essere dif-ferenti. Per esempio, una persona cammina per70.0 m verso est e poi per 30.0 m verso ovest. Ladistanza totale percorsa e di 70.0 m + 30.0 m =100 m, mentre lo spostamento e di 40.0 m. Sup-poniamo che ci siano voluti 50.0 s per completarequesto percorso. Allora la velocita scalare mediae
distanza
tempo=
100 m
50.0 s= 2.00 m/s .
D’altra parte, il modulo della velocita vettorialemedia e
spostamento
tempo=
40.0 m
50.0 s= 0.800 m/s .
Questa differenza fra velocita scalare e modulodella velocita vettoriale puo risultare quando sicalcolano i valori medi.Per discutere il moto unidirezionale di un ogget-to, supponiamo che a un certo istante, diciamot1, l’oggetto si trovi sull’asse delle x in posizio-ne x1, in un certo sistema di coordinate, e a unistante successivo, t2, si trovi in posizione x2. Iltempo trascorso e ∆t = t2 − t1; durante questointervallo di tempo lo spostamento del nostro og-getto e ∆x = x2 − x1. Allora, la velocita vetto-riale media, definita come lo spostamento divisoil tempo trascorso, puo essere scritta come
< ~v >=∆x
∆t=x2 − x1t2 − t1
.
Nel caso di asse x positivo verso destra, occorrenotare che se x2 e inferiore a x1, l’oggetto si stamuovendo verso sinistra e allora ∆x = x2 − x1e minore di zero. Il segno dello spostamento, equindi anche della velocita vettoriale media, in-dica la direzione: la velocita vettoriale media epositiva per un oggetto che si muove verso de-stra lungo l’asse x, e negativa quando l’oggettosi muove verso sinistra. La direzione della velo-cita vettoriale media e sempre la stessa di quelladello spostamento.
Esercizio 1.21. Un corridore si muove in linearetta in modo tale che la sua posizione lungo unasse di riferimento sia x1 = 60.0 m al tempot1 = 0 e x2 = 45.0 m al tempo t2 = 3.00 s,come mostrato in Fig. 1.10. Qual e la velocitavettoriale media del corridore?
Soluzione. Lo spostamento e ∆x = x2 − x1 =45.0 − 60.0 = −15.0 m. Il tempo impiegato e∆t = t2 − t1 = 3.00 − 0 = 3.00 s. La velocitavettoriale media e
< ~v >=∆x
∆t= −5.00 m/s .
Lo spostamento e, quindi, la velocita media so-no negativi, indicando che il corridore si muove
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

8 Capitolo 1. Cinematica traslazionale
Figura 1.10: Velocita vettoriale media; ∆x = x2 −x1.
verso sinistra lungo l’asse x, come indicato dallafreccia mostrata in Fig. 1.10. Cosı, possiamo di-re che la velocita vettoriale media e di −5.00 m/se la velocita scalare media e invece di 5.00 m/s.
Esercizio 1.22. Un oggetto viene lanciato dauna rampa di altezza h = 20.0 m con una ve-locita v = (10.0 m/s, 0, 0) e una accelerazioneg = (0,−9.81 m/s2, 0). Determinate la velocitavettoriale media di caduta del’oggetto.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
Capitolo 2
Dinamica traslazionale
2.1 Leggi di Newton
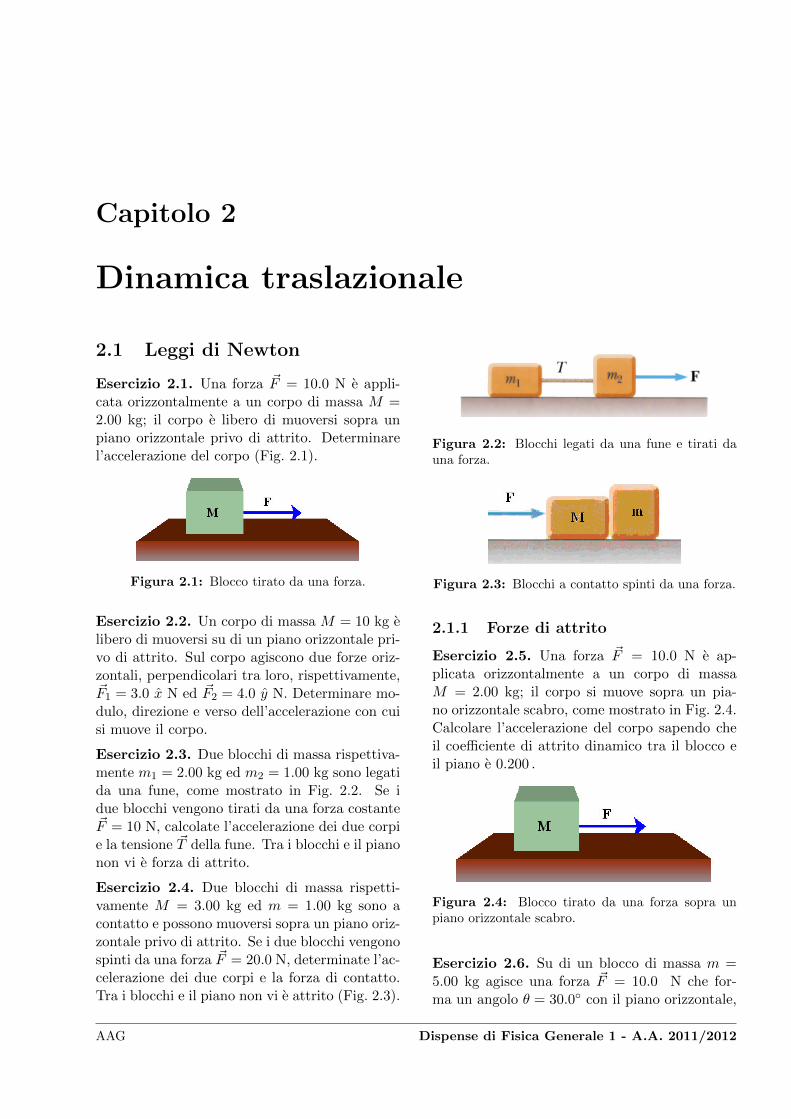
Esercizio 2.1. Una forza ~F = 10.0 N e appli-cata orizzontalmente a un corpo di massa M =2.00 kg; il corpo e libero di muoversi sopra unpiano orizzontale privo di attrito. Determinarel’accelerazione del corpo (Fig. 2.1).
Figura 2.1: Blocco tirato da una forza.
Esercizio 2.2. Un corpo di massa M = 10 kg elibero di muoversi su di un piano orizzontale pri-vo di attrito. Sul corpo agiscono due forze oriz-zontali, perpendicolari tra loro, rispettivamente,~F1 = 3.0 x N ed ~F2 = 4.0 y N. Determinare mo-dulo, direzione e verso dell’accelerazione con cuisi muove il corpo.
Esercizio 2.3. Due blocchi di massa rispettiva-mente m1 = 2.00 kg ed m2 = 1.00 kg sono legatida una fune, come mostrato in Fig. 2.2. Se idue blocchi vengono tirati da una forza costante~F = 10 N, calcolate l’accelerazione dei due corpie la tensione ~T della fune. Tra i blocchi e il pianonon vi e forza di attrito.
Esercizio 2.4. Due blocchi di massa rispetti-vamente M = 3.00 kg ed m = 1.00 kg sono acontatto e possono muoversi sopra un piano oriz-zontale privo di attrito. Se i due blocchi vengonospinti da una forza ~F = 20.0 N, determinate l’ac-celerazione dei due corpi e la forza di contatto.Tra i blocchi e il piano non vi e attrito (Fig. 2.3).
Figura 2.2: Blocchi legati da una fune e tirati dauna forza.
Figura 2.3: Blocchi a contatto spinti da una forza.
2.1.1 Forze di attrito
Esercizio 2.5. Una forza ~F = 10.0 N e ap-plicata orizzontalmente a un corpo di massaM = 2.00 kg; il corpo si muove sopra un pia-no orizzontale scabro, come mostrato in Fig. 2.4.Calcolare l’accelerazione del corpo sapendo cheil coefficiente di attrito dinamico tra il blocco eil piano e 0.200 .
Figura 2.4: Blocco tirato da una forza sopra unpiano orizzontale scabro.
Esercizio 2.6. Su di un blocco di massa m =5.00 kg agisce una forza ~F = 10.0 N che for-ma un angolo θ = 30.0 con il piano orizzontale,
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
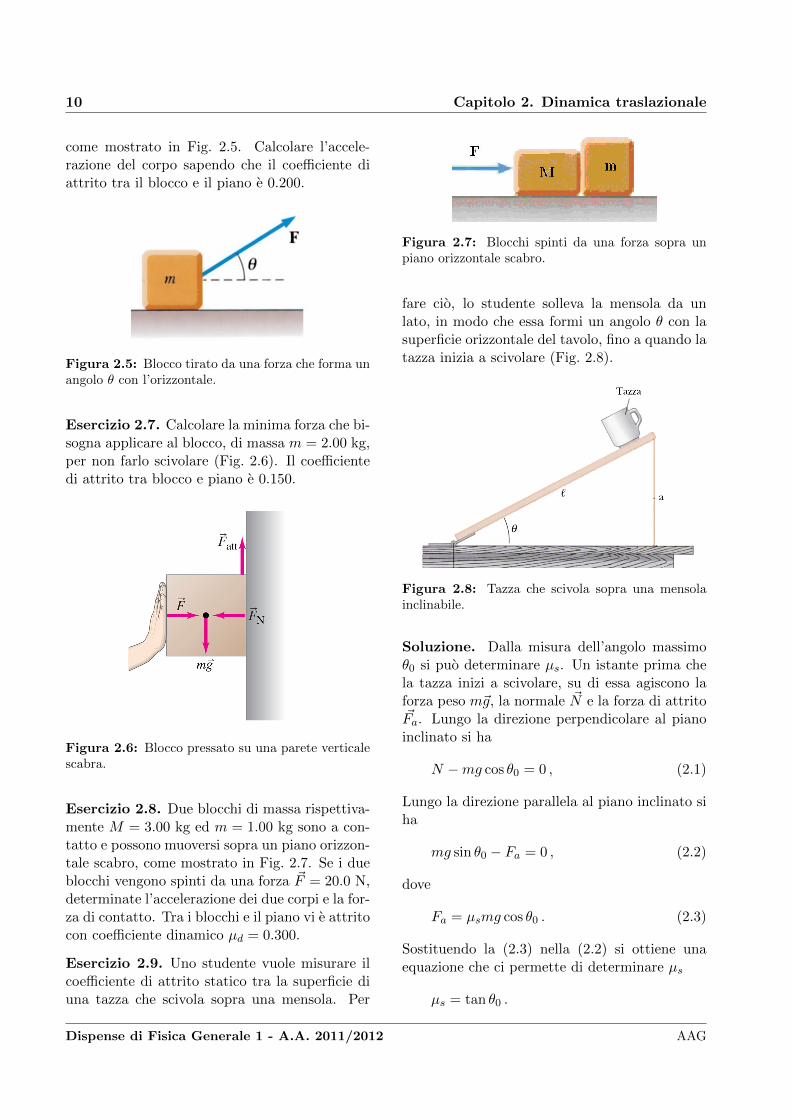
10 Capitolo 2. Dinamica traslazionale
come mostrato in Fig. 2.5. Calcolare l’accele-razione del corpo sapendo che il coefficiente diattrito tra il blocco e il piano e 0.200.
Figura 2.5: Blocco tirato da una forza che forma unangolo θ con l’orizzontale.
Esercizio 2.7. Calcolare la minima forza che bi-sogna applicare al blocco, di massa m = 2.00 kg,per non farlo scivolare (Fig. 2.6). Il coefficientedi attrito tra blocco e piano e 0.150.
Figura 2.6: Blocco pressato su una parete verticalescabra.
Esercizio 2.8. Due blocchi di massa rispettiva-mente M = 3.00 kg ed m = 1.00 kg sono a con-tatto e possono muoversi sopra un piano orizzon-tale scabro, come mostrato in Fig. 2.7. Se i dueblocchi vengono spinti da una forza ~F = 20.0 N,determinate l’accelerazione dei due corpi e la for-za di contatto. Tra i blocchi e il piano vi e attritocon coefficiente dinamico µd = 0.300.
Esercizio 2.9. Uno studente vuole misurare ilcoefficiente di attrito statico tra la superficie diuna tazza che scivola sopra una mensola. Per
Figura 2.7: Blocchi spinti da una forza sopra unpiano orizzontale scabro.
fare cio, lo studente solleva la mensola da unlato, in modo che essa formi un angolo θ con lasuperficie orizzontale del tavolo, fino a quando latazza inizia a scivolare (Fig. 2.8).
Figura 2.8: Tazza che scivola sopra una mensolainclinabile.
Soluzione. Dalla misura dell’angolo massimoθ0 si puo determinare µs. Un istante prima chela tazza inizi a scivolare, su di essa agiscono laforza peso m~g, la normale ~N e la forza di attrito~Fa. Lungo la direzione perpendicolare al pianoinclinato si ha
N −mg cos θ0 = 0 , (2.1)
Lungo la direzione parallela al piano inclinato siha
mg sin θ0 − Fa = 0 , (2.2)
dove
Fa = µsmg cos θ0 . (2.3)
Sostituendo la (2.3) nella (2.2) si ottiene unaequazione che ci permette di determinare µs
µs = tan θ0 .
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
2.2. Lavoro ed energia 11
Misurando la lunghezza l della mensola e l’altez-za a, possiamo determinare µs con la seguenterelazione
µs =h√
L2 − h2.
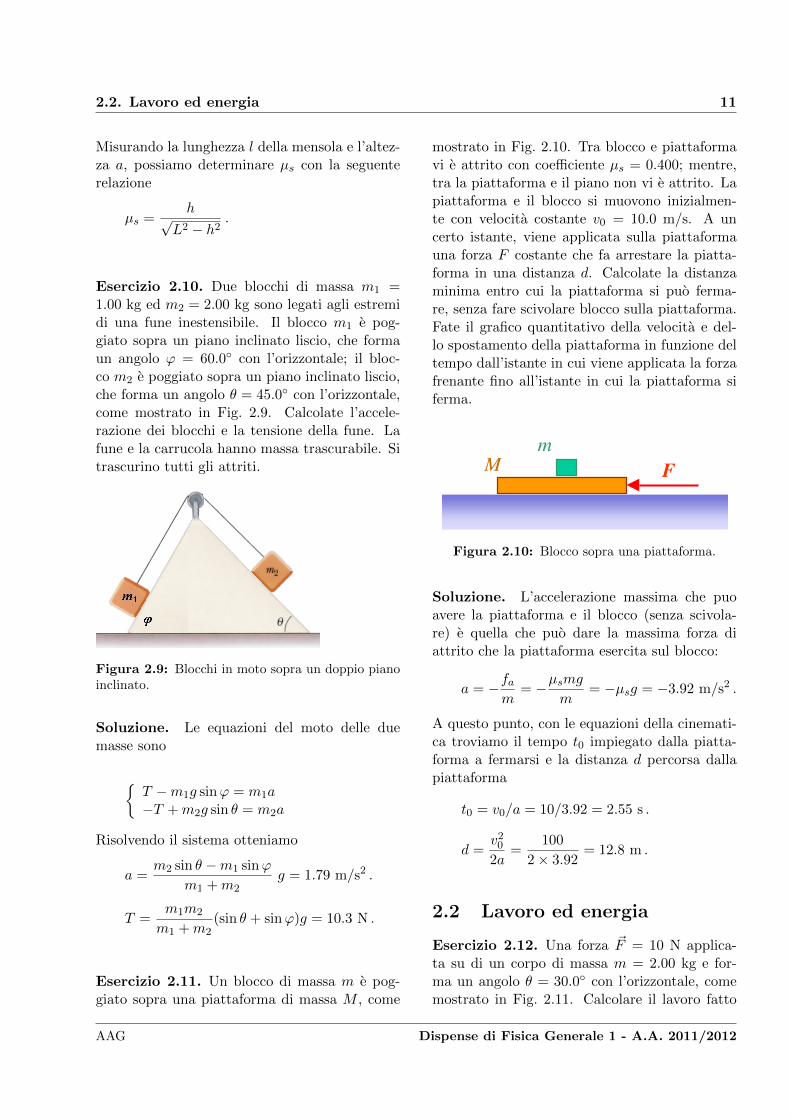
Esercizio 2.10. Due blocchi di massa m1 =1.00 kg ed m2 = 2.00 kg sono legati agli estremidi una fune inestensibile. Il blocco m1 e pog-giato sopra un piano inclinato liscio, che formaun angolo ϕ = 60.0 con l’orizzontale; il bloc-co m2 e poggiato sopra un piano inclinato liscio,che forma un angolo θ = 45.0 con l’orizzontale,come mostrato in Fig. 2.9. Calcolate l’accele-razione dei blocchi e la tensione della fune. Lafune e la carrucola hanno massa trascurabile. Sitrascurino tutti gli attriti.
Figura 2.9: Blocchi in moto sopra un doppio pianoinclinato.
Soluzione. Le equazioni del moto delle duemasse sono
T −m1g sinϕ = m1a−T +m2g sin θ = m2a
Risolvendo il sistema otteniamo
a =m2 sin θ −m1 sinϕ
m1 +m2g = 1.79 m/s2 .
T =m1m2
m1 +m2(sin θ + sinϕ)g = 10.3 N .
Esercizio 2.11. Un blocco di massa m e pog-giato sopra una piattaforma di massa M , come
mostrato in Fig. 2.10. Tra blocco e piattaformavi e attrito con coefficiente µs = 0.400; mentre,tra la piattaforma e il piano non vi e attrito. Lapiattaforma e il blocco si muovono inizialmen-te con velocita costante v0 = 10.0 m/s. A uncerto istante, viene applicata sulla piattaformauna forza F costante che fa arrestare la piatta-forma in una distanza d. Calcolate la distanzaminima entro cui la piattaforma si puo ferma-re, senza fare scivolare blocco sulla piattaforma.Fate il grafico quantitativo della velocita e del-lo spostamento della piattaforma in funzione deltempo dall’istante in cui viene applicata la forzafrenante fino all’istante in cui la piattaforma siferma.
Mm
F
Figura 2.10: Blocco sopra una piattaforma.
Soluzione. L’accelerazione massima che puoavere la piattaforma e il blocco (senza scivola-re) e quella che puo dare la massima forza diattrito che la piattaforma esercita sul blocco:
a = −fam
= −µsmgm
= −µsg = −3.92 m/s2 .
A questo punto, con le equazioni della cinemati-ca troviamo il tempo t0 impiegato dalla piatta-forma a fermarsi e la distanza d percorsa dallapiattaforma
t0 = v0/a = 10/3.92 = 2.55 s .
d =v202a
=100
2× 3.92= 12.8 m .
2.2 Lavoro ed energia
Esercizio 2.12. Una forza ~F = 10 N applica-ta su di un corpo di massa m = 2.00 kg e for-ma un angolo θ = 30.0 con l’orizzontale, comemostrato in Fig. 2.11. Calcolare il lavoro fatto
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

12 Capitolo 2. Dinamica traslazionale
Figura 2.11: Blocco tirato da una forza che formaun angolo θ con l’orizzontale.
dalla forza per spostare il corpo di una distanzad = 4.00 m lungo la direzione orizzontale.
2.2.1 Energia potenziale
Vedere: Resnick, Halliday, Krane, Fisica 1,Capitolo 12.
2.2.2 Relazione tra energia potenzialee forza
Riprendiamo in considerazione la relazione peril calcolo del lavoro compiuto da una forzaconservativa a livello infinitesimale:
dW = ~F · d~s = Fxdx+ Fydy + Fzdz ,
dove Fx, Fy e Fz sono le componenti della forza
conservativa ~F .In un percorso chiuso, il lavoro fatto da una forzaconservativa e nullo∮
(Fxdx+ Fydy + Fzdz) = 0 .
Si dimostra che la validita di tale proprieta perqualsiasi linea chiusa e condizione necessaria esufficiente per l’esistenza di una funzione dellecoordinate U(x, y, z), tale che
Fx = −∂U(x, y, z)
∂x,
Fy = −∂U(x, y, z)
∂y,
Fz = −∂U(x, y, z)
∂z.
Le quantita ∂U/∂x, ∂U/∂y, ∂U/∂z sono le de-rivata parziali della funzione U rispetto alle va-riabili x, y e z. In modo compatto le relazioni di
disopra si scrivono
~F = −grad U(x, y, z) = −∇U(x, y, z) ;
la forza e l’opposto del gradiente dell’energia po-tenziale ed e percio diretta secondo il verso dimassima diminuzione di U .Il luogo dei punti nello spazio nei quali l’ener-gia potenziale assume lo stesso valore si chiamasuperficie equipotenziale. Per uno spostamentolungo una tale superficie il lavoro e nullo e per-tanto la forza associata all’energia potenziale enormale, in ogni punto, alla superficie equipo-tenziale passante per quel punto e indica, con ilsuo verso, quello di diminuzione di U .L’energia potenziale associata alla forza peso eU(z) = mgz, se l’asse z e orientato verso l’alto.Dalla relazione tra l’energia potenziale e forza siha
~F = −z dU(z)
dz= −zmg ,
di verso opposto a quello dell’asse z.Nel caso della forza elastica U(x) = 1
2kx2 e la
forza elastica vale
~F = −xdU(x)
dx= −xkx ,
con verso opposto a quello della crescitadell’energia potenziale.Entrambi gli esempi sono unidimensionali e none necessario usare il simbolo di derivata parziale.
Esercizio 2.13. Determinare la forza checorrisponde all’energia potenziale
U(x, y) =1
2k(x2 + y2) .
Soluzione. Le componenti della forza sono dateda
Fx = −∂U(x, y)
∂x= −kx ,
Fy = −∂U(x, y)
∂y= −ky ,
Fz = −∂U(x, y)
∂z= 0 .
⇒ ~F = −∇U(x, y) = Fxx+ Fyy =
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

2.2. Lavoro ed energia 13
= −k(xx+ yy) = −k~r .La forza ~F e pertanto una forza elastica nel piano(x, y) diretta verso l’origine degli assi con moduloproporzionale alla distanza dal centro
F = k√x2 + y2 = kr .
Si tratta dell’estensione bidimensionale delconcetto di forza elastica unidimensionale
~F = −xkx .
2.2.3 Principio di conservazionedell’energia meccanica
Esercizio 2.14. Dimostrare che la forza di gra-vita che agisce su di un corpo di massa M e unaforza conservativa.
Esercizio 2.15. Una molla di lunghezza a ri-poso l0 = 10.0 cm e costante elastica k =200 N/m, disposta verticalmente come mostra-to in Fig. 2.12, viene compressa di 5.00 cm dauna massa m = 50.0 g (la massa viene poggiatasopra la molla); successivamente, la molla vie-ne lasciata libera (Fig. 2.12). Determinate l’al-tezza massima, rispetto al suolo, raggiunta dallamassa.
Figura 2.12: Blocco di massa m sostenuto da unamolla di costante elastica k.
Soluzione. Applichiamo il principio di conser-vazione dell’energia meccanica al sistema massamolla. L’energia potenziale immagazzinata nel-la molla viene convertita interamente in energiapotenziale gravitazionale. Quindi
1
2kx2 = mg∆h ;
dove ∆h e lo spostamento verticale del blocco;dall’equazione precedente ricaviamo
∆h =kx2
2mg.
L’altezza rispetto al suolo raggiunta dalla massasara data da
H = ∆h+ l0 = 0.510 + 0.100 = 0.610 m .
Nota: nel calcolo di H abbiamo trascurato lacompressione della molla dovuta alla forza pesodella massa stessa.
Esercizio 2.16. Un corpo scivola per una di-stanza d = 2.0 m lungo un piano con attrito,inclinato di un angolo θ = 45 rispetto all’oriz-zontale (Fig. 2.13). Se il corpo parte da fermo ela sua velocita finale e vf = 4.0 m/s, calcolare ilcoefficiente di attrito dinamico µd.
Figura 2.13: Forze agenti su un blocco dispostosopra un piano inclinato.
Soluzione. Applichiamo il principio di conser-vazione dell’energia meccanica tra la posizioneiniziale del corpo e la sua posizione finale
mgh =1
2mv2f +Wa ,
dove Wa = Fad e il lavoro fatto dalla forza diattrito e h = d sin(θ).Esplicitando tutti i termini otteniamo
µd =gd sin(θ)− v2f/2
gd cos(θ)∼= 0.42 .
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

14 Capitolo 2. Dinamica traslazionale
Esercizio 2.17. Un corpo si muove con velocitacostante v = 5.0 m/s sopra un piano con attritodi lunghezza d = 2.0 m, inclinato di un ango-lo θ = 15 rispetto all’orizzontale. Calcolare ilcoefficiente di attrito dinamico µd tra il corpo eil piano.
Esercizio 2.18. Una molla di lunghezza a ri-poso l0 = 10 cm e costante elastica k =200 N/m, disposta verticalmente come mostratoin Fig. 2.12, sostiene una massa m = 50 g (lamassa non e agganciata alla molla). In seguito,la molla viene compressa di 5 cm e, successiva-mente, lasciata libera. Supponendo che duranteil moto la massa perde il 2% dell’energia cineti-ca posseduta dalla massa stessa al momento dellancio, determinate l’altezza massima rispetto alsuolo raggiunta dalla massa.
2.3 Impulso e quantita di moto
2.3.1 Forze impulsive
Esercizio 2.19. Una massa m = 2 kg, inizial-mente ferma, si muove lungo l’asse x sotto l’azio-ne di una forza, diretta lungo lo stesso asse, va-riabile nel tempo secondo la legge rappresentatanel grafico di Fig. 2.14
0 1 0 2 0 3 00
5
1 0
1 5
Forza
(N)
T e m p o ( s )
Figura 2.14: Impulso.
1. Calcolare l’impulso della forza agentenell’intervallo di tempo 0÷ 20 s.
2. Disegnare un grafico quantitativo della velo-cita del corpo in funzione del tempo nell’in-tervallo 0 ÷ 20 s e calcolare la massima ve-locita raggiunta dal corpo in tale intervallodi tempo.
Esercizio 2.20. Un oggetto di massa m = 2 kgsi muove con velocita costante vi = 10 m/s nelladirezione positiva dell’asse x. All’istante t = 3 sad esso viene applicata una forza costante per unintervallo di tempo ∆t = 7 s. Alla fine di taleintervallo l’oggetto si muove con velocita vf =4 m/s nella direzione negativa dell’asse x.
1. Tracciare il grafico della velocita in funzionedel tempo nell’intervallo 0÷ 15 s.
2. Calcolare modulo direzione e verso dell’im-pulso agente sull’oggetto.
3. Calcolare il lavoro fatto dalla forza sul-l’oggetto nell’intervallo di tempo 0 ÷15 s.
2.3.2 Urti
Esercizio 2.21. Una biglia di massa m1 = 1 kgscivola sopra un piano liscio orizzontale con ve-locita v1 = 0.6 m/s; essa urta una seconda bigliadi massa m2 che le viene incontro con una velo-cita v2 = 1.2 m/s, avente la stessa direzione div1. Nell’urto le due biglie si fermano. Calcolatela massa m2 della seconda biglia.
Soluzione. Applichiamo la conservazione dellaquantita di moto
m1v1 −m2v2 = 0 ;
dall’equazione precedente possiamo calcolare lamassa m2
m2 =v1v2
m1 = 0.5 kg .
Esercizio 2.22. Un proiettile di massa m = 10 gche viaggia alla velocita v = 300 m/s si confic-ca in un blocco di legno di massa M = 2 kginizialmente fermo. Supponendo che il blocco sitrovi sopra un piano privo di attrito, calcolate lavelocita del blocco dopo l’urto.
Esercizio 2.23. Un proiettile di massam = 10 gche viaggia alla velocita di 300 m/s si conficca inun blocco di legno di massa M = 2 kg, inizial-mente fermo. I1 blocco colpito si ferma, a causa
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

2.4. Centro di massa 15
dell’attrito con la superficie sulla quale scivola,dopo 1.5 s. Calcolare il coefficiente di attrito trablocco e superficie.
Esercizio 2.24. Due oggetti di massa, rispet-tivamente, m1 = 100 g e m2 = 200 g si muo-vono su un piano orizzontale privo d’attrito se-condo due direzioni perpendicolari con velocitav1 = 45 cm/s il piu leggero e v2 = 15 cm/s l’altro.I due oggetti si urtano e restano attaccati.
1. Determinare il moto del sistema dopo l’urto.
2. Calcolare il rapporto tra l’energia cineticadel sistema prima e dopo l’urto spiegando ilrisultato ottenuto.
Esercizio 2.25. Un razzo viene lanciato ver-ticalmente e raggiunge la quota di 1000 m conuna velocita di 300 m/s. A questo punto, il raz-zo esplode dividendosi in tre frammenti uguali.Subito dopo l’esplosione, un frammento conti-nua verticalmente verso l’alto con una velocitadi 450 m/s e un secondo frammento si muoveverso est con una velocita di 240 m/s.
1. Calcolare la velocita del terzo frammen-to, subito dopo l’esplosione, in modulo,direzione e verso.
2. Calcolare la posizione del centro di massarispetto al suolo 3 s dopo l’esplosione.
3. Calcolare, rispetto al punto di lancio, i puntiin cui i tre frammenti colpiscono il suolo.
2.4 Centro di massa
2.4.1 Centro di massa di un sistema dicorpi puntiformi
2.4.2 Centro di massa di corpi rigidiomogenei
Esercizio 2.26. Determinate il raggio R di unasfera di acciaio di massa M = 1.2 kg, sapendoche la densita dell’acciaio e ρ = 7.9×103 kg/m3.
Soluzione. Determiniamo il volume della sferacome segue
V =M
ρ=
1.2
7.9× 103= 1.5× 10−4 m3 .
Conoscendo il volume della sfera, possiamoricavare il raggio della sfera nel seguente modo
V =4
3πR3 ⇒ R =
3
√3V
4π= 3.3×10−2 m .
Esercizio 2.27. Determinate la massa di un fo-glio di carta, in formato A4 (210 mm × 297 mm),sapendo che la densita superficiale del foglio eσ = 80.0 g/m2.
Soluzione. P er determinare il peso del fo-
glio basta moltiplicare l’area A del foglio per ladensita superficiale σ
m = σA = (80.0×10−6)(210×297) = 5.00 g .
Esercizio 2.28. Calcolate le coordinate del cen-tro di massa (CM) di una lastra sottile e omoge-nea, di massa M , a forma di cerchio di raggio R,con foro circolare di raggio r = R/4, localizzatoa R/2 come mostrato in Fig. 2.15.
Figura 2.15: Lastra forata
Soluzione. Per calcolare le coordinate del CMdella lastra, applichiamo il cosiddetto metodo disupplementazione che consiste nel considerare lalastra forata costituita da una lastra piena dimassa M+m sommata a un disco di massa −m,come illustrato in Fig. 2.16.
xcm =(M +m)× 0−m×R/2
M,
dove
m =M
π(R2 − r2)× πr2 .
Sostituendo r = R/2 e semplificando, troviamo
xcm = −R30.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

16 Capitolo 2. Dinamica traslazionale
Figura 2.16: La lastra piena puo essere sempre con-siderata come la somma di una lastra forata e un discouguale al foro.
Vedi: S. Focardi, I. Massa, A. Uguzzoni, FisicaGenerale, CEA (Milano, 1999), pagg. 274-275.
2.5 Esercizi di ricapitolazione
Esercizio 2.29. Un proiettile di massam = 10 gurta anelasticamente con un blocco di massaM = 300 g. Il blocco e attaccato ad una mol-la, inizialmente a riposo, di costante elasticak = 50 N/m. Il blocco e la molla sono dispostiorizzontalmente, come mostrato in Fig. 2.17, so-pra un piano orizzontale con attrito (µd = 0.60).In seguito all’urto, la molla viene compressa diuna distanza d = 4 cm. Determinare la velo-cita del proiettile un istante prima dell’urto conil blocco. g = 9.8 m/s2
Figura 2.17: Urto tra un proiettile e un bloccoattaccato a una molla.
Soluzione.
vb =
√kd2 + 2µ(M +m)gd
M +m= 0.85 m/s .
vp =M +m
mvb = 27 m/s .
Esercizio 2.30. Un proiettile di massam = 10 gche viaggia alla velocita vp = 300 m/s si confic-ca in un blocco di legno di massa M = 2.0 kginizialmente fermo. Supponendo che tra il bloc-co e il piano vi e attrito (µd = 0.15), calcolarela distanza massima che il blocco percorre dopol’urto.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

Capitolo 3
Meccanica rotazionale
3.1 Cinematica rotazionale
Esercizio 3.1. Un disco si muove con una ve-locita angolare costante di 150 giri/min. Ad uncerto istante, il disco inizia a decelerare e si fermadopo 2.2 h.
1. Qual e l’accelerazione media del disco?
2. Quanti giri compie il disco prima difermarsi?
Soluzione.
α =ωf − ωi
∆t= − ωi
∆t= −1.00× 10−3 rad/s2 ;
θ(t) = θ0 + ω0∆t+1
2αt2 =
1
2ωi∆t = 3.11× 104 rad .
Il numero di giri risulta quindi
numero di giri =θ
2π= 4.95× 103 giri .
Esercizio 3.2. Una particella si muove lungouna traiettoria circolare di raggio R = 30 cmin senso orario, con velocita che varia nel tempocome v(t) = v0 exp(−βt), con v0 = 2.0 m/s eβ = 0.10 s−1. Calcolate la sua accelerazione ~a altempo t0 = 5.0 s.
Soluzione.
|aθ(t)| = βv0 exp(−βt)
|ar(t)| =v2(t)
R
~a(t) = −r |ar(t)|+ θ |aθ(t)|
~a(5.0 s) = (−r 4.9 + θ 0.12) m/s2
Esercizio 3.3. Un punto materiale si muovelungo una traiettoria circolare di raggio R =0.20 m con velocita angolare costante ω =15 rad/s. A partire dall’istante t = 0 e finoall’istante t1 = 16 s la sua accelerazione ango-lare vale α1 = −1.0 rad/s2, per t > t1 restacostante al valore α2 = −16 rad/s2.
1. Tracciare un grafico quantitativo dell’acce-lerazione in funzione del tempo, per valoridi t positivi;
2. Calcolare la velocita angolare del puntoall’istante t = 10 s;
3. Calcolare dopo quanto tempo dall’istantet = 0 il punto si ferma.
3.2 Relazione vettoriale tragrandezze traslazionali erotazionali
Ricaviamo le relazioni generali per la velo-cita e l’accelerazione, ma prima dimostriamo leseguenti relazioni
dr
dt= ωθ e
dθ
dt= −ωr .
Supponiamo che i versori r e θ si spostano alpassare del tempo, come mostrato in Fig. 3.1.Al passare del tempo, quindi, i versori cambiano
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

18 Capitolo 3. Meccanica rotazionale
Figura 3.1: Variazione dei versori r e θ nel motocircolare.
Figura 3.2: Variazione del versore r.
Figura 3.3: Variazione del versore θ.
solo la loro direzione. Per calcolare le deriva-te dei versori, calcoliamo le variazioni mostrategraficamente in Fig. 3.2 e 3.3, rispettivamente,per r e θ
∆r = |r|(∆θ)θ = θ∆θ ,
da cui otteniamo
∆r
∆t= θ
∆θ
∆t;
al limite per ∆t→ 0 otteniamo
dr
dt= θ
dθ
dt= ωθ .
Analogamente, possiamo ricavare
∆θ = −|θ|r∆θ = −r∆θ
da cui otteniamo
∆θ
∆t= −r∆θ
∆t;
al limite per ∆t→ 0 otteniamo
dθ
dt= −r dθ
dt= −ωr .
Per calcolare l’espressione generica della velo-cita bisogna eseguire la derivata temporale delvettore ~r = rr
~v =d~r
dt= r
dr
dt+ r
dr
dt= rvr + θrω . (3.1)
Notiamo che il versore θ si puo ottenere comeprodotto vettoriale tra i versori θ = z ∧ r, nellaterna di assi (r, θ, z); allora, la (3.1) diventa
~v = rvr + rωz ∧ r ;
definendo ~ω = zω e sapendo che rr = ~r,otteniamo
~v = rvr + ~ω ∧ ~r .
Per calcolare l’accelerazione, consideriamo il ca-so semplice in cui il moto avviene su una traiet-toria circolare. In questo caso, l’accelerazione siottiene derivando rispetto al tempo la seguenterelazione
~v = ~ω ∧ ~r = ωrθ ; (3.2)
~a =d~v
dt= r
d
dt
(ωθ)
=
= r
[ωdθ
dt+ θ
dω
dt
]= r
[−rω2 + θα
].
Come prima, θ = z ∧ r e definendo ~α = zα,otteniamo
~a = −ω2~r + ~α ∧ ~r .
Il primo termine e l’accelerazione centripe-ta, mentre il secondo termine e l’accelerazionetangenziale.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

3.3. Dinamica Rotazionale 19
3.3 Dinamica Rotazionale
3.3.1 Dinamica del moto circolareuniforme
Esercizio 3.4. Un corpo di massa m e appeso auna fune di massa trascurabile di lunghezza L. Ilcorpo ruota attorno all’asse verticale formandoun angolo θ = 28, come mostrato in Fig. 3.4.Sapendo che la velocita del corpo e v = 5.0 m/s,determinate la lunghezza della fune e costruite ildiagramma di corpo libero.
Soluzione. Sul corpo agisce la forza peso e latensione della fune. Per scrivere le equazionidel moto del corpo dobbiamo scomporre la forzapeso e la tensione della fune rispetto, agli assiverticale e orizzontale.
Figura 3.4: Pendolo conico.
Lungo l’asse verticale, la componente Ty dellatensione e uguale e opposta alla forza peso m~g(vedi Fig. 3.4)
Ty = T cos θ = mg . (3.3)
La componente orizzontale della tensione non eequilibrata e quindi fa accelerare il corpo conaccelerazione
ac =v2
r.
Quindi,
Tx = T sin θ = mac = mv2
r. (3.4)
Calcolando la tensione T dalla Eq. (3.3) esostituendo nell’Eq. (3.4), ricaviamo
r =v2
g tan θ. (3.5)
Dalla (3.5) possiamo ricavare
L =r
sin θ=
v2
g tan θ sin θ= 10 m .
Vedere: Giancoli, Fisica, pagg. 137-140.
3.3.2 Momento d’inerzia
Esercizio 3.5. Calcolare il momento d’inerziadi un anello di massa M e raggio R rispettoad un asse passante per il centro O dell’anelloe perpendicolare al piano dell’anello stesso.
Soluzione. Applichiamo la formula per ilcalcolo del momento d’inerzia IO
IO =
∫R2dm.
Poiche l’anello ha una densita lineare di massaλ = M/2πR, l’elemento di massa sara dato dadm = λRdθ. Quindi, l’integrale per il calcolo diIO risulta
IO =
∫ 2π
0R2λRdθ =
= R3λ
∫ 2π
0dθ = 2πλR3 .
Sostituendo λ otteniamo
IO = MR2 .
3.3.3 Conservazione dell’energiameccanica nei moti rotazionali
Esercizio 3.6. Un manubrio, composto da duemasse m = 1.00 kg e M = 2.00 kg connesse tradi loro tramite un’asticella di massa trascurabile,ruota in un piano orizzontale con velocita ango-lare ω = 2.00 rad/s attorno ad un asse perpen-dicolare al manubrio e distante, rispettivamente,a = 0.500 m dalla massa m e b = 1.00 m dallamassa M , come mostrato in Fig. 3.5. Calcolatel’energia cinetica totale del sistema.
Soluzione. L’energia cinetica del sistema puoessere calcolata in due modi. Dal punto di vi-sta traslazionale, l’energia totale e data dalla
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

20 Capitolo 3. Meccanica rotazionale
Figura 3.5: Manubrio.
somma dell’energia cinetica traslazionale dellesingole masse
K =1
2mv21 +
1
2Mv22 =
=1
2m(ωa)2 +
1
2M(ωb)2
K =1
2
(ma2 +Mb2
)ω2 .
Dal punto di vista rotazionale, l’energia totale edata da
K =1
2Iω2 ,
dove
I = ma2 +Mb2 .
Quindi, l’energia rotazionale totale risulta
K =1
2
(ma2 +Mb2
)ω2 .
In entrambi i casi, si ottiene la stessa relazioneper l’energia cinetica totale. Nota: e lasciato allostudente il compito di sostituire i valori numericie di calcolare quindi il risultato finale.
3.3.4 Conservazione del momentoangolare
Esercizio 3.7. Un anello di raggio R e massaM = 100 g rotola, senza strisciare, sopra un pia-no orizzontale in modo che il suo centro di massaabbia una velocita vcm = 2.0 m/s. Si calcoli illavoro necessario per fermare l’anello.
Soluzione. Il lavoro che bisogna fare per fer-mare l’anello deve essere uguale all’energia cine-tica totale dell’anello. L’energia cinetica totalesi compone di due parti, una traslazionale e unarotazionale, date da
Kt =1
2Mv2cm = 0.50× 0.10× 4.0 = 0.20 J ,
Kr =1
2Icmω
2
Poiche il momento d’inerzia dell’anello rispet-to al suo centro di massa e Icm = MR2 eω = vcm/R, si ha
Kr =1
2MR2
(vcmR
)2=
1
2Mv2cm = 0.20 J .
L’energia totale eK = Kt+Kr = 0.40 J, e quindiil lavoro W che la forza deve fare per fermarel’anello e
W = K = 0.40 J .
Esercizio 3.8. Una sbarra di massa M e di lun-ghezza l, incernierata in un estremo, viene colpi-ta da una pallina di massa m che si muove conuna velocita vi, come mostrato in Fig. 3.6.
a) Descrivete il moto del sistema dopo l’ur-to, supponendo che la pallina rimangaattaccata alla sbarra.
b) Calcolate la distanza d dal punto in cui lasbarra e incernierata, affinche sia nulla lareazione del vincolo.
Figura 3.6: Urto tra una pallima e una barrettaincernierata nel punto O.
Soluzione. a) Sul sistema agisce la forza vinco-lare della cerniera, pertanto la quantita di motodel sistema non si conserva. L’energia cineticadel sistema non si conserva neanche perche l’urtoe completamente anelastico. Si conserva, invece,il momento angolare del sistema rispetto a unasse passante per la cerniera.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

3.3. Dinamica Rotazionale 21
Imponendo quindi la conservazione del momen-to angolare Li = Lf , otteniamo la seguenteequazione
mvid = (md2 + I)ωf ,
dove il momento d’inerzia della sbarra rispettoad un asse passante per un estremo e dato da
I =1
3Ml2 .
Dalle equazioni di sopra, si ricava
ωf =mvid
md2 +Ml2/3.
b) Il vincolo non esercita alcuna forza se laquantita di moto del sistema, pallina e sbarra,non cambia e quindi se si verifica le seguentecondizione
mvi = mvf +Mvcm ,
dove
vf = ωd e Vcm = ωl/2 .
Dalle relazioni di sopra, troviamo
d =2
3l .
Esercizio 3.9. Un disco di massa m e raggio Rscivola senza attrito sopra un piano orizzontalecon velocita v0, fino a quando un dentino postosul bordo del disco urta contro un punto fisso P,come mostrato in Fig. 3.7. Supponendo l’urtoelastico, calcolate in funzione dei parametri datila velocita finale v e la velocita angolare ω deldisco dopo l’urto.
Soluzione.
v =v03,
ω =4v03R
.
Figura 3.7: Disco con dente.
3.3.5 Moto di precessione
Vedere R. Resnick D. Halliday, Fisica vol.1, CEAIII Ed.
Consideriamo una trottola di momento di iner-zia I che ruota con velocita angolare ω attornoall’asse verticale. La trottola ha un momentoangolare ~L = I~ω. Non appena l’asse della trot-tola si discosta di poco dall’asse verticale di unangolo θ, nasce un momento torcente della forzapeso τ che fa variare il momento angolare dellatrottola:
~τ =∆~L
∆t.
Figura 3.8: Moto di precessione di una trottola.
Dalla figura si vede che la variazione ∆~L e le-gata alla rotazione della componente orizzontale
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

22 Capitolo 3. Meccanica rotazionale
del momento angolare ~L, cioe a L sin(θ), dallaseguente relazione:
∆L
L sin(θ)= ∆ϕ .
La velocita angolare di precessione Ω e data da
Ω =∆ϕ
∆t=
∆L
L sin(θ)∆t=
τ
L sin(θ).
Infine, sapendo che τ = mgR sin(θ), dove Rindividua la posizione del centro di massa del-la trottola rispetto al punto di contatto con ilpavimento, si ha
Ω =
mgRsin(θ)///////
Iωsin(θ)///////=mgR
Iω.
3.4 Moto armonico semplice
Esercizio 3.10. Un corpo si muove secondo l’e-quazione x(t) = 8 cos(2t + 5) dove x e misuratoin centimetri e t in secondi. Determinare:
1. il periodo, la frequenza, l’ampiezza e la fase;
2. la velocita massima e l’accelerazione massi-ma.
Esercizio 3.11. L’oscillatore armonico mostra-to in Fig. 3.9 e costituito da un blocco di mas-sa m = 200 g ed una molla di costante elasticak = 20 N/m. L’origine delle ascisse corrispon-de con la posizione della massa quando la mollae a riposo. Sapendo che l’equazione oraria delblocco e x(t) = A cos(Ωt + φ0), determinate Ω,A, e φ0; a t = 0 il blocco si trova nella posi-zione x0 ≡ x(t = 0) = 1.0 cm e ha velocitav0 ≡ v(t = 0) = 0.10 m/s.
Figura 3.9: Oscillatore armonico semplice.
Esercizio 3.12. Un pendolo semplice di mas-sa m = 0.86 kg oscilla armonicamente. La suaequazione oraria e θ(t) = 0.085 sin(4.95 t) rad.Calcolare:
1. la lunghezza del pendolo e il suo periodo;
2. la massima variazione dell’energia potenzia-le;
3. il valore massimo e minimo della tensionedel filo.
Soluzione.
T = 1.3 s
l0 = 0.4 m
3.5 Esercizi di ricapitolazione
Esercizio 3.13. Un corpo di massa m e poggia-to sopra una sfera di raggio R, come mostrato inFig. 3.10. Il corpo inizia a scivolare senza attri-to sulla superficie della sfera. Calcolate l’altezzah, rispetto al suolo, alla quale il corpo si staccadalla superficie della sfera.
Figura 3.10: Blocco poggiato sopra una sfera.
Soluzione. Poiche sulla massa m agiscono so-lo forze conservative, l’energia meccanica dellamassa m si conserva. Prendendo come riferi-mento il piano orizzontale che passa per il centrodella sfera, otteniamo
Ei = Ef ⇒ mgR = mgh+1
2mv2 , (3.6)
dove h indica la posizione della massa rispetto alpiano orizzontale di riferimento.La massa si stacca dalla superficie della sfera non
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

3.5. Esercizi di ricapitolazione 23
appena essa raggiunge una velocita tale che siverifichi la seguente condizione
mg sin θ ≤ mv2
R, (3.7)
dove θ e l’angolo formato dal raggio e l’asse oriz-zontale.Poiche sin θ ≥ h
R , dall’Eq. (3.7) ricaviamo
v2 ≥ hg .
Sostituendo v2 nell’Eq. (3.6), troviamo
Rg ≥ hg +1
2hg ,
da cui ricaviamo h = 23R; quindi,
H = h+R =5
3R .
Esercizio 3.14. Un disco omogeneo, di massaM = 200 g e diametro D = 20 cm, ruota in sen-so orario sopra un piano orizzontale senza attritocon una velocita angolare ω0 = 5 rad/s. Il disco evincolato a ruotare attorno a un perno che passaper il centro del disco. A un certo istante vienelanciata con velocita v0 = 5 m/s, contro il di-sco, una pallina di massa m = 50 g a distanzad = D/4 dal centro del disco, come mostrato inFig. 3.11. In seguito all’urto, la pallina rimaneattaccata sul bordo del disco. Calcolate
1. la velocita angolare del disco dopo l’urto;
2. l’impulso del perno sul disco.
Figura 3.11: Pallina che urta un disco ruotante.
Soluzione. In questo problema si conserva soloil momento angolare totale rispetto al centro deldisco
mv0d− I0ω0 = −mvR− I0ω ,
dove
I0 =1
2MR2 .
La pallina dopo l’urto si muovera con velocitaangolare ω e quindi la sua velocita traslazionalee v = ωR. Sostituendo v nell’equazione di sopra,ricaviamo
ω = −mv0d− I0ω0
mR2 + I0=Mω0 − mv0
R
M + 2m= −5 rad/s .
Dopo l’urto il disco ruotera in verso opposto conω = −5 rad/s. L’impulso che applica il pernoal disco e uguale alla variazione della quantitadi moto della pallina ~J = ∆~p. Conoscendo lavelocita angolare finale del disco (e della pallina)possiamo determinare la variazione di quantitadi moto della pallina
∆px = pxf −mv0 = m(−|ω|R cos θ − v0) =
= −m(|ω|d+ v0)
∆py = pyf = m(|ω|R sin θ) = m(|ω|√R2 − d2
),
dove abbiamo sostituito
cos θ =d
Re sin θ =
√R2 − d2R
.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
24 Capitolo 3. Meccanica rotazionale
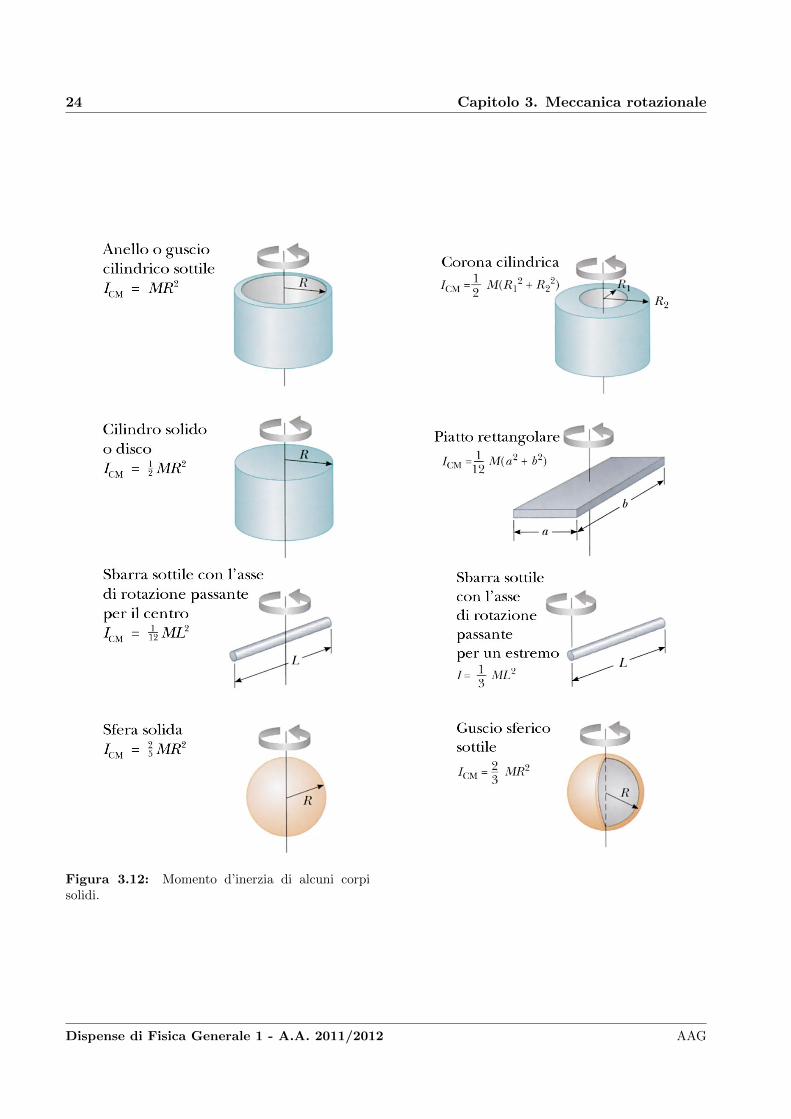
Figura 3.12: Momento d’inerzia di alcuni corpisolidi.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
Capitolo 4
Statica
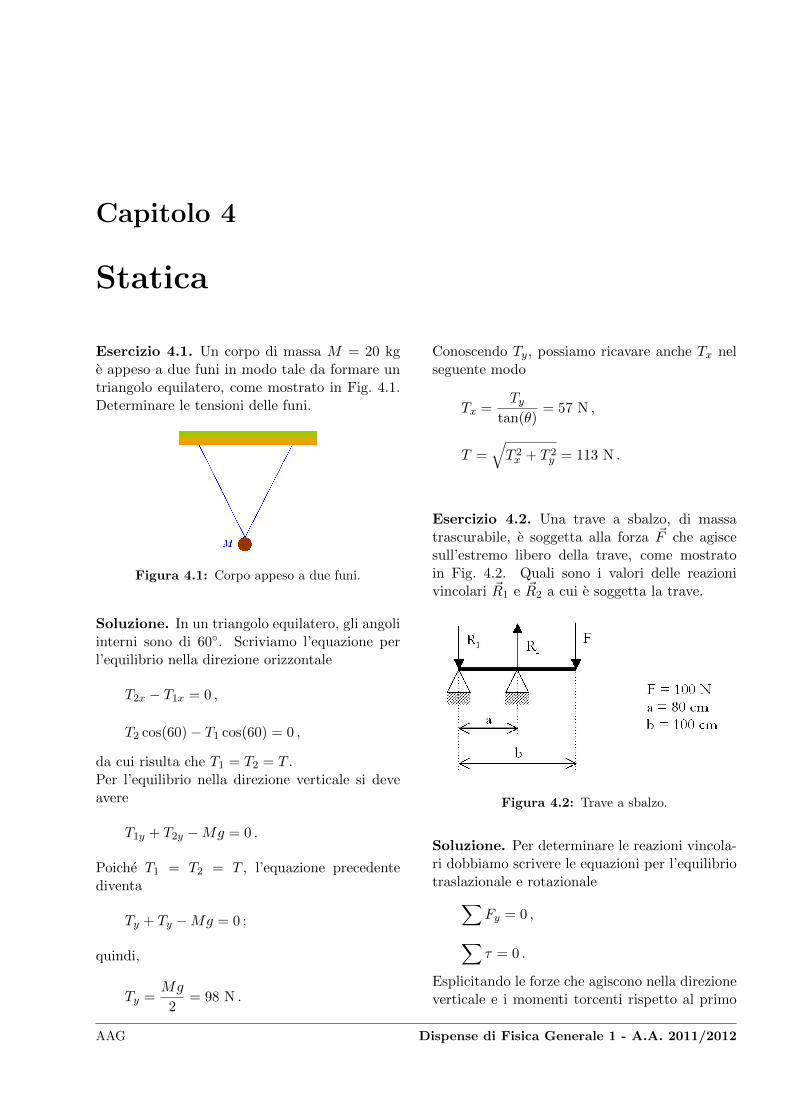
Esercizio 4.1. Un corpo di massa M = 20 kge appeso a due funi in modo tale da formare untriangolo equilatero, come mostrato in Fig. 4.1.Determinare le tensioni delle funi.
Figura 4.1: Corpo appeso a due funi.
Soluzione. In un triangolo equilatero, gli angoliinterni sono di 60. Scriviamo l’equazione perl’equilibrio nella direzione orizzontale
T2x − T1x = 0 ,
T2 cos(60)− T1 cos(60) = 0 ,
da cui risulta che T1 = T2 = T .Per l’equilibrio nella direzione verticale si deveavere
T1y + T2y −Mg = 0 .
Poiche T1 = T2 = T , l’equazione precedentediventa
Ty + Ty −Mg = 0 ;
quindi,
Ty =Mg
2= 98 N .
Conoscendo Ty, possiamo ricavare anche Tx nelseguente modo
Tx =Ty
tan(θ)= 57 N ,
T =√T 2x + T 2
y = 113 N .
Esercizio 4.2. Una trave a sbalzo, di massatrascurabile, e soggetta alla forza ~F che agiscesull’estremo libero della trave, come mostratoin Fig. 4.2. Quali sono i valori delle reazionivincolari ~R1 e ~R2 a cui e soggetta la trave.
Figura 4.2: Trave a sbalzo.
Soluzione. Per determinare le reazioni vincola-ri dobbiamo scrivere le equazioni per l’equilibriotraslazionale e rotazionale∑
Fy = 0 ,∑τ = 0 .
Esplicitando le forze che agiscono nella direzioneverticale e i momenti torcenti rispetto al primo
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
26 Capitolo 4. Statica
vincolo, otteniamo
R2 −R1 − F = 0 ;
R2a− Fb = 0 .
Dalle equazioni di sopra ricaviamo
R1 =Fb
a− F = 25 N ,
R2 =Fb
a= 125 N .
Esercizio 4.3. Due molle di costante elastica k1e k2 e lunghezza a riposo l10 e l20 sono connesse inserie e inserite in un incavo di larghezza L, comemostrato in Fig. 4.3. Determinate la lunghezzadi equilibrio delle due molle.
Figura 4.3: Molle in equilibrio statico inserite in unincavo.
Soluzione. Poiche le due molle sono in equili-brio e necessario che le due forze elastiche sianouguali
k1x1 = k2x2l01 + l02 − L = x1 + x2
Risolvendo il sistema di sopra otteniamo lasoluzione cercata
x1 = (l01 + l02 − L)k2
k1 + k2,
x2 = (l01 + l02 − L)k1
k1 + k2.
Esercizio 4.4. Una mensola di massa M e dilunghezza L e fissata in un estremo a una pareterigida, mentre l’altro estremo e sospeso tramiteuna fune che forma un angolo θ con l’asse dellamensola, come mostrato in Fig. 4.4. Determinatela tensione della fune e la reazione vincolare dellaparete.
Figura 4.4: Mensola con fune.
Soluzione.
Ry =P
2;
Rx =P
2 tan θ;
T =P
2 sin θ.
Esercizio 4.5. Due blocchi, di massa m e lun-ghezza L, sono disposti sopra un tavolo uno so-pra l’altro, come mostrato in Fig. 4.5. Calcolatela massima distanza x tra l’estremo del bloccosuperiore e il tavolo, che si puo avere senza farecadere i blocchi.
Soluzione. Per risolvere il problema, dobbiamoscrivere le equazioni per l’equilibrio di entrambi iblocchi. Per il blocco 2, semplicemente si ottieneche esso puo sporgere di L/2 dal corpo 1. Per ilcorpo 1 invece si ha
N −mg −mg = 0 ,
N = 2mg ,
dove N e la forza vincolare che il tavolo esercitasul blocco 1, in corrispondenza dello spigolo deltavolo stesso.Per quanto riguarda i momenti che agiscono sulcorpo 1, rispetto allo spigolo del tavolo, si ha
mga−mg(L
2− a)
= 0
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

27
Figura 4.5: Blocchi in equilibrio statico.
2a =L
2
a =L
4.
Per trovare la distanza x dobbiamo sommare ledue distanze
x =L
2+
(L
2− L
2
)=
3
4L .
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
28 Capitolo 4. Statica
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
Capitolo 5
Meccanica dei fluidi
5.1 Statica dei fluidi
5.1.1 Legge di Stevino
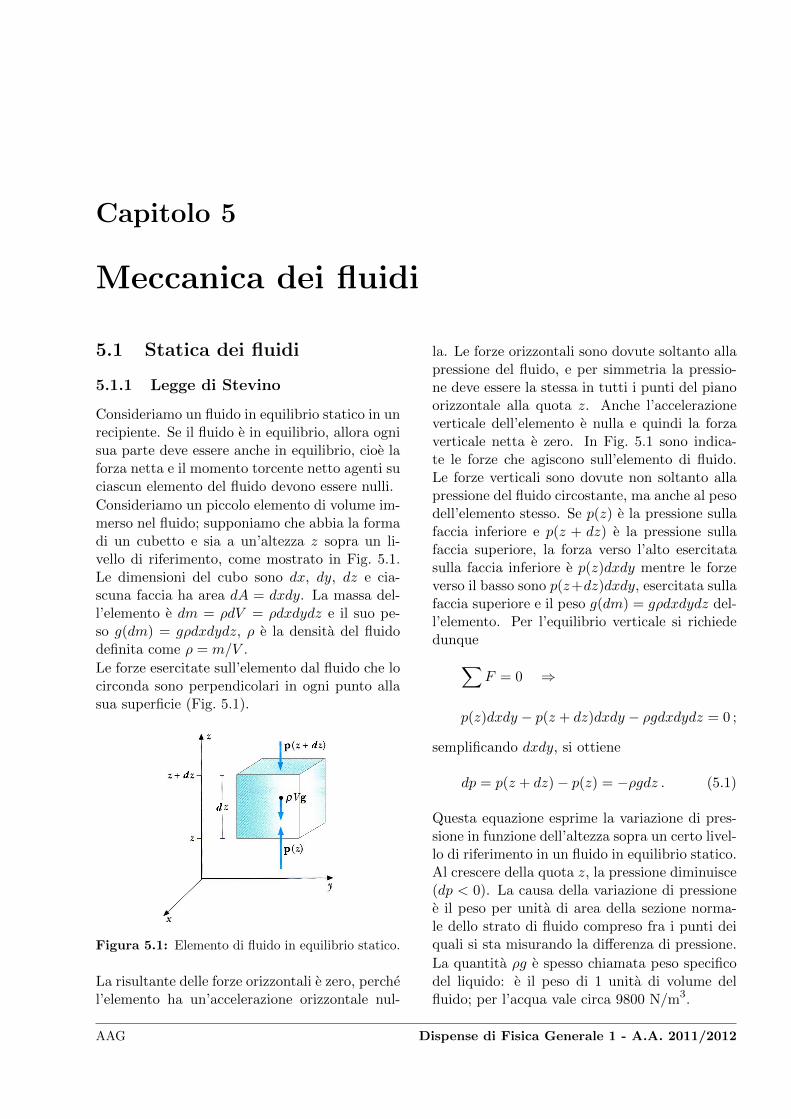
Consideriamo un fluido in equilibrio statico in unrecipiente. Se il fluido e in equilibrio, allora ognisua parte deve essere anche in equilibrio, cioe laforza netta e il momento torcente netto agenti suciascun elemento del fluido devono essere nulli.
Consideriamo un piccolo elemento di volume im-merso nel fluido; supponiamo che abbia la formadi un cubetto e sia a un’altezza z sopra un li-vello di riferimento, come mostrato in Fig. 5.1.Le dimensioni del cubo sono dx, dy, dz e cia-scuna faccia ha area dA = dxdy. La massa del-l’elemento e dm = ρdV = ρdxdydz e il suo pe-so g(dm) = gρdxdydz, ρ e la densita del fluidodefinita come ρ = m/V .
Le forze esercitate sull’elemento dal fluido che locirconda sono perpendicolari in ogni punto allasua superficie (Fig. 5.1).
Figura 5.1: Elemento di fluido in equilibrio statico.
La risultante delle forze orizzontali e zero, perchel’elemento ha un’accelerazione orizzontale nul-
la. Le forze orizzontali sono dovute soltanto allapressione del fluido, e per simmetria la pressio-ne deve essere la stessa in tutti i punti del pianoorizzontale alla quota z. Anche l’accelerazioneverticale dell’elemento e nulla e quindi la forzaverticale netta e zero. In Fig. 5.1 sono indica-te le forze che agiscono sull’elemento di fluido.Le forze verticali sono dovute non soltanto allapressione del fluido circostante, ma anche al pesodell’elemento stesso. Se p(z) e la pressione sullafaccia inferiore e p(z + dz) e la pressione sullafaccia superiore, la forza verso l’alto esercitatasulla faccia inferiore e p(z)dxdy mentre le forzeverso il basso sono p(z+dz)dxdy, esercitata sullafaccia superiore e il peso g(dm) = gρdxdydz del-l’elemento. Per l’equilibrio verticale si richiededunque∑
F = 0 ⇒
p(z)dxdy − p(z + dz)dxdy − ρgdxdydz = 0 ;
semplificando dxdy, si ottiene
dp = p(z + dz)− p(z) = −ρgdz . (5.1)
Questa equazione esprime la variazione di pres-sione in funzione dell’altezza sopra un certo livel-lo di riferimento in un fluido in equilibrio statico.Al crescere della quota z, la pressione diminuisce(dp < 0). La causa della variazione di pressionee il peso per unita di area della sezione norma-le dello strato di fluido compreso fra i punti deiquali si sta misurando la differenza di pressione.
La quantita ρg e spesso chiamata peso specificodel liquido: e il peso di 1 unita di volume delfluido; per l’acqua vale circa 9800 N/m3.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
30 Capitolo 5. Meccanica dei fluidi
Se p1 e la pressione all’altezza z1 e p2 e la pres-sione all’altezza z2 sopra un determinato livellodi riferimento, integrando l’Eq. (5.1) otteniamo
p2 − p1 = −ρg(z2 − z1) . (5.2)
Per i liquidi, pressoche incomprimibili, ρ e inpratica costante e le differenze di livello sonodifficilmente tanto grandi da dover considerarevariazioni di g.Se un liquido ha una superficie libera, e questoil livello di riferimento naturale dal quale misu-rare l’altezza. Sulla superficie libera di solito lapressione e uguale alla pressione atmosferica p0.Indicando con h = z2 − z1 la profondita dallasuperficie libera del punto considerato, la pres-sione puo essere calcolata con l’Eq. (5.2). Risultaquindi
p(h) = p0 + ρgh .
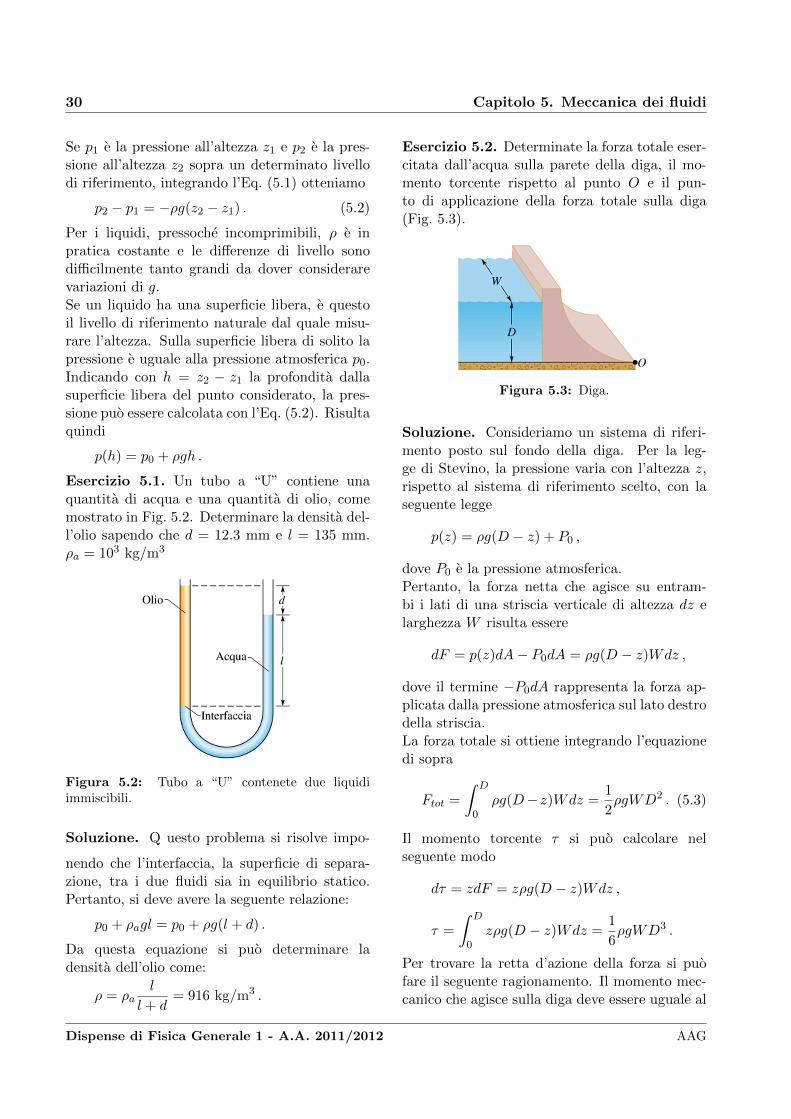
Esercizio 5.1. Un tubo a “U” contiene unaquantita di acqua e una quantita di olio, comemostrato in Fig. 5.2. Determinare la densita del-l’olio sapendo che d = 12.3 mm e l = 135 mm.ρa = 103 kg/m3
Figura 5.2: Tubo a “U” contenete due liquidiimmiscibili.
Soluzione. Q uesto problema si risolve impo-
nendo che l’interfaccia, la superficie di separa-zione, tra i due fluidi sia in equilibrio statico.Pertanto, si deve avere la seguente relazione:
p0 + ρagl = p0 + ρg(l + d) .
Da questa equazione si puo determinare ladensita dell’olio come:
ρ = ρal
l + d= 916 kg/m3 .
Esercizio 5.2. Determinate la forza totale eser-citata dall’acqua sulla parete della diga, il mo-mento torcente rispetto al punto O e il pun-to di applicazione della forza totale sulla diga(Fig. 5.3).
Figura 5.3: Diga.
Soluzione. Consideriamo un sistema di riferi-mento posto sul fondo della diga. Per la leg-ge di Stevino, la pressione varia con l’altezza z,rispetto al sistema di riferimento scelto, con laseguente legge
p(z) = ρg(D − z) + P0 ,
dove P0 e la pressione atmosferica.Pertanto, la forza netta che agisce su entram-bi i lati di una striscia verticale di altezza dz elarghezza W risulta essere
dF = p(z)dA− P0dA = ρg(D − z)Wdz ,
dove il termine −P0dA rappresenta la forza ap-plicata dalla pressione atmosferica sul lato destrodella striscia.La forza totale si ottiene integrando l’equazionedi sopra
Ftot =
∫ D
0ρg(D− z)Wdz =
1
2ρgWD2 . (5.3)
Il momento torcente τ si puo calcolare nelseguente modo
dτ = zdF = zρg(D − z)Wdz ,
τ =
∫ D
0zρg(D − z)Wdz =
1
6ρgWD3 .
Per trovare la retta d’azione della forza si puofare il seguente ragionamento. Il momento mec-canico che agisce sulla diga deve essere uguale al
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

5.3. Dinamica dei fluidi reali 31
momento generato dalla forza totale, data dal-l’Eq. (5.3), deve essere uguale al momento zaFtot.Quindi, si ha
za =τ
Ftot=
∫ D0 zdF∫ D0 dF
=
=
∫ D0 zρg(D − z)Wdz∫ D0 ρg(D − z)Wdz
=
=1
2ρgWD2 =
D
3.
5.2 Dinamica dei fluidi ideali
5.2.1 Equazione di Bernoulli
Esercizio 5.3. In un condotto orizzontale di se-zione A1 = 15 cm2, si trova una strozzatura disezione A2 = 5.0 cm2 (Fig. 5.4). Nel condot-to scorre un liquido ideale omogeneo di densitaρ = 0.90 g/cm3. Se la differenza di pressionefra le due sezioni e ∆p = 9300 Pa, calcolare laportata volumetrica Q del condotto.
Figura 5.4: Condotto orizzontale con strozzatura.
Soluzione. A pplicando l’equazione di Bernoulli
tra le due sezioni, si ha
p1 +1
2ρv21 = p2 +
1
2ρv22 .
Dall’equazione precedente si ricava ∆p
∆p = p2 − p1 =1
2ρ(v21 − v22). (5.4)
Poiche si deve conservare la portata, si deveavere
Q = v1 A1 = v2 A2 ,
e quindi
v1 =Q
A1e v2 =
Q
A2.
Sostituendo queste relazioni nella (5.4), possia-mo ricavare la portata Q
Q = A1 A2
√2∆p
ρ(A21 −A2
2)= 2.4 dm3/s .
Esercizio 5.4. Un disco di diametro d = 13 mme massa m = 1.5 g e poggiato sopra un pianoorizzontale. Al di sopra del disco si instaura unflusso di aria con velocita v. Calcolate la velocitache deve avere l’aria affinche il disco si sollevi dalpiano. ρaria = 1.2 kg/m3
Soluzione. Applicando l’equazione di Bernoulliper le linee di flusso che passano sopra il disco eper quelle che passano sotto al disco, si ha:
p1 +1
2ρv21 = p2 +
1
2ρv22 , (5.5)
dove v1 e la velocita sopra il disco e v2 e la velo-cita sotto il disco.Poiche v2 < v1, si ha p2 > p1. Quindi
δp = p2 − p1 =1
2ρv21 . (5.6)
La forza necessaria per sollevare il disco e F =∆p A = mg, dove A e l’area del disco. Sostituen-do, quindi, la pressione data dall’Eq. (5.6) pos-siamo determinare la velocita con la quale devefluire l’aria sopra al disco
v1 =
√2 ∆p
ρ=
√2 mg
ρA= 14 m/s ≈ 50 km/h .
5.3 Dinamica dei fluidi reali
5.3.1 Viscosita
I fluidi reali manifestano un attrito interno, chia-mato viscosita. La viscosita esiste sia nei liquidisia nei gas ed e essenzialmente una forza di attri-to fra strati adiacenti di fluido; dato che gli stratisi muovono l’uno sull’altro. Nei liquidi la visco-sita e principalmente dovuta alle forze di coesio-ne1 tra le molecole. Nei gas essa nasce dagli urti
1Le forze di coesione sono forze di tipo elettrostaticoche si esercitano tra molecole dello stesso liquido.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

32 Capitolo 5. Meccanica dei fluidi
tra le molecole.La viscosita dei fluidi puo essere espressa quan-titativamente per mezzo del coefficiente di visco-sita η (la lettera greca minuscola eta). Qui diseguito, definiamo operativamente la viscosita.Consideriamo uno strato sottile di fluido postotra due piatti piani. Uno dei piatti e fermo el’altro viene messo in movimento, come mostra-to in Fig. 5.5. Il fluido direttamente a contatto
Figura 5.5: Metodo per la misura della viscosita diun fluido reale.
con ciascun piatto e legato alla superficie da unaforza di adesione2 tra le molecole del liquido equelle del piatto. Cosı, la superficie superioredel fluido si muove con la stessa velocita v delpiatto superiore, mentre il fluido a contatto conil piatto fisso rimane fermo. Lo strato immobi-le del fluido rallenta lo strato appena sopra, chea sua volta rallenta quello successivo, e cosı via.Cosı, la velocita varia in modo continuo da 0 a v,come mostrato in Fig. 5.5. Il rapporto tra la va-riazione di velocita e la distanza, nella direzioneperpendicolare a v, in cui avviene tale variazione(cioe v/l) viene detto gradiente di velocita.Muovere il piatto superiore richiede una certaforza, come potete verificare muovendo un piattopiano sopra un tavolo sporco di sciroppo. Perun certo fluido, si trova che la forza per unita disuperficie F/A necessaria per mantenere in motoil piatto mobile e proporzionale al gradiente divelocita v/l
F
A∝ v
l. (5.7)
In pratica, per differenti fluidi, piu viscoso e ilfluido piu grande e la forza richiesta; la costantedi proporzionalita per la precedente equazione edetta coefficiente di viscosita η. L’Eq. (5.7) puo
2Le forze di adesione sono forze di tipo elettrostaticoche si esercitano tra molecole differenti, ad esempio tra lemolecole del fluido e quelle del recipiente.
essere scritta piu genericamente come
F
A= η
dv
dy, (5.8)
dove abbiamo scritto il gradiente di velocita, nel-la direzione perpendicolare alla direzione di mo-to, come dv/dy.L’unita di misura di η nel sistema SI e N s/m2.Nel sistema cgs, l’unita e dyne s/cm2 e si chia-ma poise (simbolo P). Le viscosita spesso ven-gono misurate in centipoise (simbolo cP), che eil centesimo di poise. In Tab. 5.1 sono elencatii coefficienti di viscosita di vari fluidi. Per ognifluido e inoltre specificata la temperatura, datoche questa ha un effetto notevole sulla viscosita;quella dei liquidi come, ad esempio, l’olio per mo-tori diminuisce rapidamente all’aumentare dellatemperatura.
Fluido η (cP) η (N s/m2)
Acqua distil. (20C) 1.0 1.0 ×10−3
Alcool etilico (20C) 1.2 1.2 ×10−3
Olio d’oliva (20C) ∼90 ∼90 ×10−3
Glicerina (20C) ∼850 ∼850 ×10−3
Tabella 5.1: Valori della viscosita di alcuni liquidi.
Esercizio 5.5. Un fluido reale scorre in un con-dotto cilindrico di raggio R e lunghezza L. Aicapi del tubo agiscono le pressioni p1 e p2, conp1 > p2. Calcolate il profilo della velocita discorrimento v(r) del fluido lungo il diametro delcondotto.
Soluzione. Consideriamo un tubo di flusso diraggio r < R e lunghezza L, in moto con velocitacostante v(r). Poiche il fluido si muove con velo-cita costante, la sommatoria di tutte le forze cheagiscono sul tubo di flusso deve essere nulla. Laforza di attrito viscoso Fv deve essere bilanciatadalla forza di pressione tra le due sezioni S1 eS2. Le forze agenti sull’elemento di fluido sonodunque la forza di attrito viscoso Fv e le forze dipressione F1 ed F2. La forza di attrito, direttain verso opposto al moto, agisce sul mantello la-terale del cilindro, di superficie S = 2πrL, ed edata da
Fv = η (2πrL)d
drv(r) .
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

5.3. Dinamica dei fluidi reali 33
La velocita del liquido decresce dall’asse centra-le verso le pareti del condotto, ed e nulla per lostrato di liquido a contatto con la parete inter-na, v(R) = 0. Pertanto, scegliendo come direzio-ne orientata positivamente una semiretta che haorigine sull’asse del cilindro, la quantita dv/dr enegativa; di conseguenza, Fv e opposta alla di-rezione di moto del fluido. La forza F1 e dovutaalla pressione p1 che si esercita sulla sezione S1,percio il suo valore e F1 = p1πr
2 ed e orienta-ta nello stesso verso del moto. Analogamentericaviamo F2 = −p2πr2 orientata in verso oppo-sto al moto. Applicando l’equazione del moto,nell’ipotesi di velocita costante, la risultante del-le forze che agiscono sulla massa in esame deveessere nulla
~F1 + ~F2 + ~Fv = 0 ,
da cui
p1πr2 − p2πr2 + 2πrηL
dv
dr= 0 . (5.9)
Come abbiamo detto sopra, la forza d’attrito vi-scoso e concorde con la forza di pressione F2, inquanto il termine dv/dr e negativo.L’Eq. (5.9) e una equazione differenziale del pri-mo ordine a variabili separabili la cui soluzione ela velocita in funzione del raggio v(r). Raggrup-pando i termini comuni e separando le variabilisi ottiene
dv = −(p1 − p2)r2ηL
dr .
Integrando otteniamo
v(r) = −(p1 − p2)r2
4ηL+ C ;
dove C e una costante di integrazione, che sidetermina imponendo la condizione al contornov(R) = 0
C =(p1 − p2)R2
4ηL;
pertanto, la velocita v(r) risulta
v(r) =(p1 − p2)
4ηL
(R2 − r2
). (5.10)
La velocita di scorrimento del fluido reale non euguale in tutti i punti della sezione, ma dipendedal raggio r. In particolare, e massima al centrodel condotto (r = 0) ed e nulla a contatto con lepareti del condotto (r = R).
5.3.2 Equazione di Poiseuille
Un fluido ideale non presenta viscosita e puo flui-re, quindi, in un tubo orizzontale senza che vengaapplicata alcuna forza su di esso. La viscosita inun fluido reale agisce come una specie di attritoe quindi e necessaria una differenza di pressio-ne tra le due estremita del tubo per ottenere unflusso costante, anche quando il tubo e orizzon-tale. Lo scienziato francese J. L. Poiseuille (dacui prese il nome il poise), determino la relazioneche lega la portata di un fluido reale incomprimi-bile, che si muove con flusso laminare in un tubocilindrico, con la viscosita del fluido e il gradientedi pressione lungo il condotto. Il risultato, cono-sciuto come equazione di Poiseuille, e il seguente
Q =πR4
8η
(p1 − p2)L
, (5.11)
dove R e il raggio interno del tubo, L e la sualunghezza, (p1 − p2) e la variazione di pressionetra le due estremita del condotto, η e il coeffi-ciente di viscosita e Q e la portata in volume(volume del fluido che passa nell’unita di tempo,che nel sistema SI si misura in m3/s).E importante notare che l’equazione di Poiseuillesi applica solo ai moti laminari; essa ci dice chela portata Q e direttamente proporzionale al gra-diente di pressione (p1−p2)/L ed e inversamenteproporzionale alla viscosita del fluido.
Esercizio 5.6. Calcolate la portata di un con-dotto, di raggio R e lunghezza L, sottoposto auna differenza di pressione ∆p.
Soluzione. La portata del condotto puo esserecalcolata considerando un anello di raggio r elarghezza dr; la quantita di fluido che attraversatale sezione e data da
dQ = v(r)dS ,
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

34 Capitolo 5. Meccanica dei fluidi
dove dS = 2πrdr e v(r) e data dalla (5.10).Integrando l’equazione di sopra, otteniamo
Q =
∫ R
0v(r)2πrdr =
=π∆p
2ηL
∫ R
0(R2 − r2)rdr =
πR4
8η
∆p
L.
La relazione appena trovata e proprio l’equazionedi Poiseuille dell’Eq. (5.11).
5.3.3 Legge di Stokes
Consideriamo un corpo di densita ρ che si muo-ve in un liquido di densita ρL, con ρL < ρ, sottol’azione della forza di gravita. Il corpo sara sog-getto, oltre alla forza di gravita e alla spinta diArchimende, a una forza di attrito viscoso che sioppone al suo moto. Nel caso in cui il corpo siauna piccola sfera di raggio R, la forza di attri-to viscoso e proporzionale alla velocita relativav della sfera, al raggio R e alla viscosita η delliquido, secondo la seguente legge
Fv = −6πηRv ; (5.12)
il segno meno indica che la forza ha la stessadirezione ma verso opposto alla velocita. Questarelazione e nota come legge di Stokes.
Esercizio 5.7. Determinare l’andamento in fun-zione del tempo della velocita di una pallinadi massa m che si muove in un liquido viscososoggetta alla forza di gravita.
Soluzione. La pallina sara soggetta alla forzadi gravita, alla spinta di Archimede e alla forzadi attrito viscoso data dall’Eq. 5.12 in verso op-posto alla velocita, che scriviamo per semplicitacome
Fv = −βv , (5.13)
dove β e una costante (β = 6πηR).Per ottenere l’equazione del moto, possiamo ap-plicare la seconda legge di Newton: ~F = m~a.La sferetta si muovera quindi in accordo con laseguente legge
mg − ρlV g − βv = mdv
dt, (5.14)
dove abbiamo incluso la spinta di Archimede da-ta da ρlV g, con ρl la densita del liquido.L’Eq. (5.14) puo essere messa nella seguenteforma
dv
v − (mg′/β= − β
mdt = −dt
τ, (5.15)
dove abbiamo posto g′ = g(1− ρl/ρ) e τ = m/β.Integriamo tra t = 0 e t e tra v = 0 e v = v(t)∫ v(t)
0
dv
v −mg′/β= −1
τ
∫ t
0dt = − t
τ, (5.16)
ln(v −mg′/β)
∣∣∣∣v(t)0
= − tτ, (5.17)
da cui si ottiene
v(t) =mg′
β−mg
′
βe−
tτ = vL
(1− e−
tτ
), (5.18)
dove abbiamo definito vL = mg′/β.Questa e la velocita limite che la sferetta rag-giungera quando la forza viscosa sara ugualee opposta alla somma della forza peso e dellaspinta di Archimede. Da questo istante in poila velocita della sferetta non aumentera piu el’accelerazione sara nulla.
Mettiamo in grafico la velocita della sferetta infunzione del tempo. La velocita si avvicinera alvalore vL asintoticamente per t τ .
t e m p o
v L
τ
Figura 5.6: Velocita di una sferetta che cade in unfluido viscoso
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG

5.3. Dinamica dei fluidi reali 35
Per tempi piccoli, la velocita aumenta linearmen-te con il tempo come
v(t) =vLτt , t τ . (5.19)
Esercizio 5.8. Una pallina di acciaio di rag-gio R = 2 mm cade in un serbatoio contenen-te glicerina. Calcolate la velocita limite del-la pallina. ρa = 8.0 g/cm3, ρg = 1.3 g/cm3,ηg = 0.85 Ns/m2
Soluzione. La pallina e soggetta alle seguentiforze: la forza peso mg, orientata verticalmenteverso il basso, la spinta di Archimede SA, direttaverticalmente verso l’alto, e la forza di attritoviscoso Fv, diretta in verso opposto al moto, equindi verticalmente verso l’alto.La velocita limite (detta anche velocita di sedi-mentazione nel caso di particelle piccole) si rag-giunge quando la somma di tutte le forze cheagiscono sulla pallina e nulla
m~g + ~SA + ~Fv = 0 .
Esplicitando queste forze, con il segno appropria-to, otteniamo
−ρaV g + ρgV g + 6πηRv = 0 ,
da cui possiamo ricavare la velocita limite v∞
v∞ =2R2g
9η(ρa − ρg) = 0.068 m/s .
5.3.4 Moto laminare e moto turbolen-to: numero di Reynolds
Il fisico inglese Osborne Reynolds, nel 1883, ese-guı per la prima volta in modo sistematico espe-rimenti sul moto di fluidi in tubi a sezione cir-colare. Egli osservo che si poteva descrivere ladinamica del fluido in termini di un fattore adi-mensionale, chiamato appunto numero di Rey-nolds, ottenuto combinando la velocita media v,il diametro del tubo d, la densita ρ e la viscositaη:
Re =ρvd
η.
L’esperimento consisteva nel fare fluire, con por-tata costante, un liquido in un tubo trasparentead asse rettilineo, nel quale veniva iniettato uncolorante per mezzo di un ago. Al variare delfattore Re, Reynolds individuo cosı tre differentiregimi di moto.
• Per valori Re . 2000, il flusso si mantenevastazionario e si comportava come se fosseformato da delle lamine sottili, chiamato perl’appunto regime laminare. Il colorante cioesi muoveva in una sottile linea che rimanevaparallela alla direzione del tubo.
• Per valori 2000 . Re . 3000, la linea per-deva la sua stazionarieta formando piccoleondulazioni che dipendevano dal tempo, ri-manendo tuttavia sottile. Questo regime edetto regime transitorio.
• Per valori Re & 3000, dopo un piccolo trat-to iniziale dove le oscillazioni crescevano, ilcolorante tendeva a diffondersi nel fluido.Questo regime e detto regime turbolento ede caratterizzato da un moto disordinato.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

36 Capitolo 5. Meccanica dei fluidi
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
Capitolo 6
Termodinamica
6.1 Definizioni
Sistema Termodinamico. Chiamiamo siste-ma termodinamico una porzione del mondoche puo essere costituita da una o piu par-ti, per esempio un volume di gas, un liquidoin equilibrio con il suo vapore, un insiemedi blocchi di solidi diversi; tale sistema eoggetto delle nostre osservazioni per quan-to riguarda le proprieta fisiche macroscopi-che che lo caratterizzano e le loro eventualivariazioni.
Ambiente. Per ambiente intendiamo quell’in-sieme che puo essere costituito da una solaparte (per esempio l’aria o un altro fluidoin cui e immerso il sistema) o da piu parti(per esempio diversi corpi solidi a contat-to con il sistema), con cui il sistema puointeragire: l’ambiente pertanto contribuiscein generale a determinare le caratteristichefisiche macroscopiche del sistema e la loroevoluzione.
Universo. L’insieme sistema piu ambiente sichiama universo termodinamico.
Sistema Aperto. Se tra il sistema e l’ambienteavvengono scambi di energica e di materia, ilsistema e detto aperto. Ad esempio, se il si-stema e costituito da un liquido in ebollizio-ne e l’ambiente dal recipiente che contieneil liquido, dall’atmosfera esterna compresoil vapore e dalla sorgente di calore, nel pro-cesso di ebollizione si ha trasformazione diliquido in vapore e quindi passaggio di mate-ria dal sistema all’ambiente; inoltre, vi e cer-
tamente passaggio di energia dall’ambienteal sistema tramite la sorgente di calore.
Sistema Chiuso. Il sistema si dice chiuso se so-no esclusi scambi di materia, ma si hannosolamente scambi di energia. Ritornandoall’esempio precedente, il liquido e contenu-to in un recipiente chiuso, a contatto con lasorgente di calore; il vapore prodotto rimaneall’interno del sistema.
Sistema Isolato. Il sistema e detto isolato senon avvengono scambi di energia e di ma-teria con un altro sistema esterno, cioe conl’ambiente. L’universo termodinamico for-mato da un sistema e dal suo ambientee da considerarsi come un sistema isola-to. Nella nostra trattazione ci occuperemoesclusivamente di sistemi chiusi, che possonoscambiare solo energia.
Variabili Termodinamiche. Un sistema ter-modinamico viene descritto tramite un nu-mero ridotto di grandezze fisiche diretta-mente misurabili, dette coordinate o va-riabili termodinamiche, come volume, pres-sione, temperatura, massa, concentrazione,densita, ecc. Esse si dividono in due tipi.
Variabili Estensive. Alcune variabili ter-modinamiche esprimono una proprietaglobale del sistema, che dipende in par-ticolare dalle dimensioni o dall’esten-sione del sistema; tali variabili ven-gono chiamate estensive e sono addi-tive. Massa e volume sono variabiliestensive.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012
38 Capitolo 6. Termodinamica
Variabili Intensive. Altre variabili espri-mono invece una proprieta locale, chepuo variare da punto a punto del si-stema; queste sono chiamate intensi-ve e non sono additive. Pressione,temperatura e densita sono variabiliintensive.
Il numero minimo di coordinate termodi-namiche necessario per descrivere comple-tamente un sistema termodinamico non efissato a priori, ma dipende dalle caratte-ristiche chimico-fisiche dei vari sistemi chevengono studiati. Lo stato di un gas idea-le, ad esempio, e descrivibile tramite tregrandezze, pressione, volume e temperatu-ra, legate tra loro dall’equazione di stato,PV = nRT , per cui due sole sono variabiliindipendenti mentre la terza e determina-ta dal valore che assumono le prime due.Le proprieta di un sistema vengono sem-pre espresse in funzione dei valori delle suecoordinate termodinamiche.
6.2 Temperatura e principiozero della termodinamica
Vedere: R. Resnick, D. Halliday, Fisica, vol. 1,III Ed. pagg. 481-489.
6.2.1 Espansione termica dei corpisolidi
Esercizio 6.1. Su una lastra di rame viene pra-ticata un’asola quadrata di lato L = 8.0 cm.Si determini la variazione dell’area dell’asola sela temperatura della lastra aumenta di 50C.αrame = 17× 10−6 C−1
Soluzione. Considerando la lastra di rameisotropa, abbiamo
∆A = 2αA0∆T =
= 2(17× 10−6C−1)(0.080 m)2(50C) =
= 11× 10−6 m2 = 11 mm2 .
La lunghezza di ciascun lato aumenta, dandoluogo a un aumento ∆A dell’area dell’asola.
Sostanza α (10−6 C−1)
Ghiaccio (a 0C) 51Piombo 29
Alluminio 23Ottone 19Rame 17
Calcestruzzo 12Acciaio 11Vetro 9
Vetro (Pyrex) 3.2Diamante 1.2
Lega metallica Invar 0.7
Tabella 6.1: Alcuni valori dei coefficienti didilatazione lineare a temperatura ambiente.
6.3 Calorimetria
6.3.1 Capacita termica e calorespecifico
Esercizio 6.2. Un cubetto di ghiaccio di 100 galla temperatura di −15C viene immerso in unbicchiere contenente 200 g di acqua alla tempe-ratura di 25C. Trascurando la capacita termi-ca del bicchiere, dire quale sara la temperatu-ra finale del sistema. λ = 80 cal/g; cghiaccio =0.50 cal/g K
Esercizio 6.3. Un blocco di rame di massam = 100 g a T = 40C viene immerso in unbagno di acqua e ghiaccio a pressione atmosfe-rica. Calcolare quanto ghiaccio deve fondere af-finche il sistema raggiunga l’equilibrio termico.λ = 80 cal/g ; crame = 9.2× 10−2 cal/g K
6.3.2 Conducibilita termica
Esercizio 6.4. Due lastre di area A e spessore,rispettivamente, L1 ed L2 sono disposte comemostrato in Fig. 6.1. Le lastre hanno conducibi-lita termica, rispettivamente, k1 e k2 e sono mes-se a contatto con due sorgenti di calore a tem-peratura, rispettivamente, T1 e T2, con T1 < T2.Determinate il flusso di calore attraverso le duelastre.
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
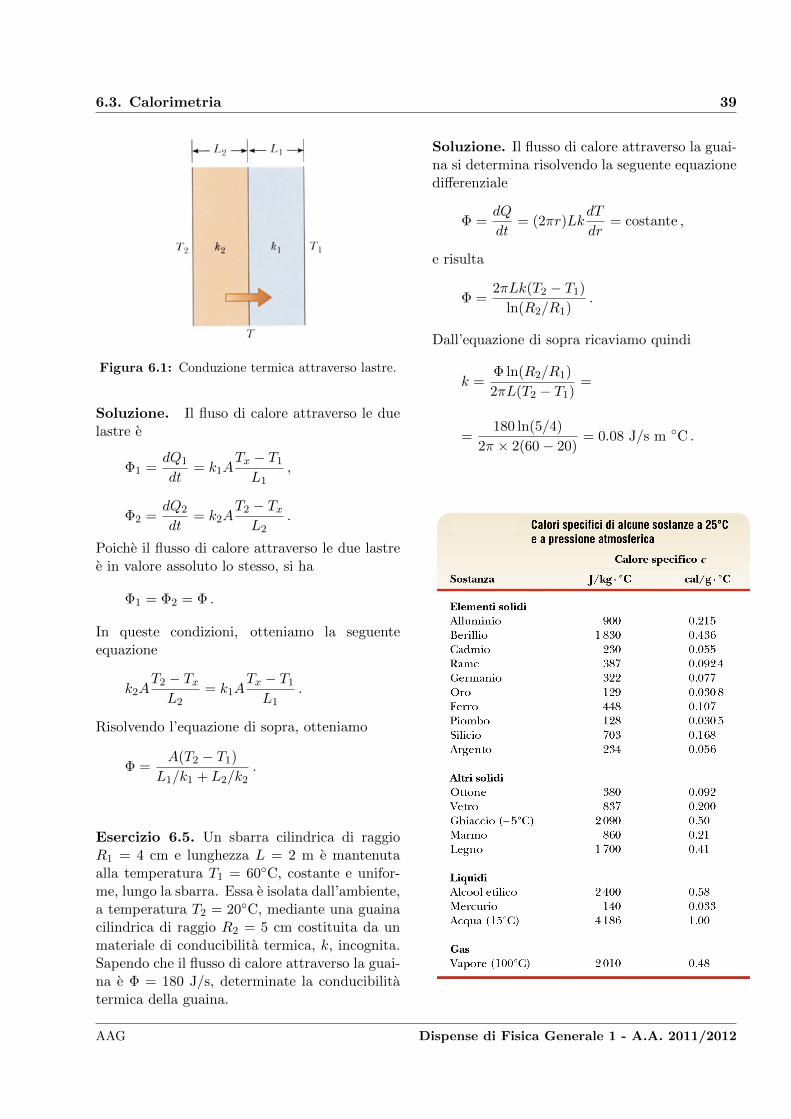
6.3. Calorimetria 39
Figura 6.1: Conduzione termica attraverso lastre.
Soluzione. Il fluso di calore attraverso le duelastre e
Φ1 =dQ1
dt= k1A
Tx − T1L1
,
Φ2 =dQ2
dt= k2A
T2 − TxL2
.
Poiche il flusso di calore attraverso le due lastree in valore assoluto lo stesso, si ha
Φ1 = Φ2 = Φ .
In queste condizioni, otteniamo la seguenteequazione
k2AT2 − TxL2
= k1ATx − T1L1
.
Risolvendo l’equazione di sopra, otteniamo
Φ =A(T2 − T1)
L1/k1 + L2/k2.
Esercizio 6.5. Un sbarra cilindrica di raggioR1 = 4 cm e lunghezza L = 2 m e mantenutaalla temperatura T1 = 60C, costante e unifor-me, lungo la sbarra. Essa e isolata dall’ambiente,a temperatura T2 = 20C, mediante una guainacilindrica di raggio R2 = 5 cm costituita da unmateriale di conducibilita termica, k, incognita.Sapendo che il flusso di calore attraverso la guai-na e Φ = 180 J/s, determinate la conducibilitatermica della guaina.
Soluzione. Il flusso di calore attraverso la guai-na si determina risolvendo la seguente equazionedifferenziale
Φ =dQ
dt= (2πr)Lk
dT
dr= costante ,
e risulta
Φ =2πLk(T2 − T1)
ln(R2/R1).
Dall’equazione di sopra ricaviamo quindi
k =Φ ln(R2/R1)
2πL(T2 − T1)=
=180 ln(5/4)
2π × 2(60− 20)= 0.08 J/s m C .
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

40 Capitolo 6. Termodinamica
6.4 Legge dei gas perfetti
Esercizio 6.6. Calcolate il volume occupato dauna mole di gas perfetto a temperatura ambiente(T = 25C) e pressione atmosferica (Pa = 1.01×105 Pa). R = 8.31 J/mole K
Soluzione. Dall’equazione di stato dei gasperfetti
PV = nRT
ricaviamo il volume
V =nRT
P= 24.5 litri .
Esercizio 6.7. Un recipiente di volume V =1 litro contiene un gas perfetto a pressione P =10.1× 105 Pa e temperatura T = 27C. La mas-sa molare del gas e M = 32 g/mole. Calco-late la massa del gas contenuto nel recipiente.R = 8.31 J/mole K
Soluzione. Dall’equazione dei gas perfettipossiamo ricavare il numero di moli del gas
n =PV
RT= 0.41 moli .
La massa del gas e data da
m = nM = 0.41× 32 = 13 g .
6.5 Primo principio dellatermodinamica
Esercizio 6.8. Un gas perfetto monoatomicoesegue la trasformazione termodinamica reversi-bile indicata in Fig. 6.2. Calcolate il calore scam-biato nella trasformazione dallo stato A→ B, sa-pendo che la temperatura iniziale e Ti = 575 K.R = 8.31 J/mole K
Soluzione. P rima di tutto, calcoliamo il
numero di moli n usando l’equazione dei gasperfetti
n =PiViRTi
= 10 moli .
Figura 6.2: Trasformazione termodinamica.
Conoscendo n, possiamo calcolare la temperatu-ra finale
Tf =PfVfnR
= 241 K .
Conoscendo la variazione di temperatura, pos-siamo calcolare anche la variazione di energiainterna nel seguente modo
∆Eint = ncV ∆T = −41.7 kJ .
Dal grafico della trasformazione, possiamocalcolare il lavoro fatto dal sistema
W =1
2(Pf−Pi)(Vf−Vi)+(Vf−Vi)Pi = 20 kJ .
Infine, conoscendo ∆Eint e W , possiamo calco-lare il calore scambiato applicando il I principiodella termodinamica
Q = ∆Eint +W = −21.7 kJ .
Il sistema cede 21.7 kJ di calore all’ambiente.
Esercizio 6.9. Una mole di gas perfetto monoa-tomico compie reversibilmente una trasformazio-ne adiabatica dallo stato A allo stato B, seguitada una espansione isobara dallo stato B allo sta-to C. Riportare la trasformazione termodinamicanel piano (P, V ). Calcolare in modo generico lavariazione di energia interna e il lavoro tra lostato iniziale e lo stato finale.
Esercizio 6.10. Una mole di gas perfetto mo-noatomico e contenuta in un recipiente non iso-lato termicamente a pressione P1, volume V1 e
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
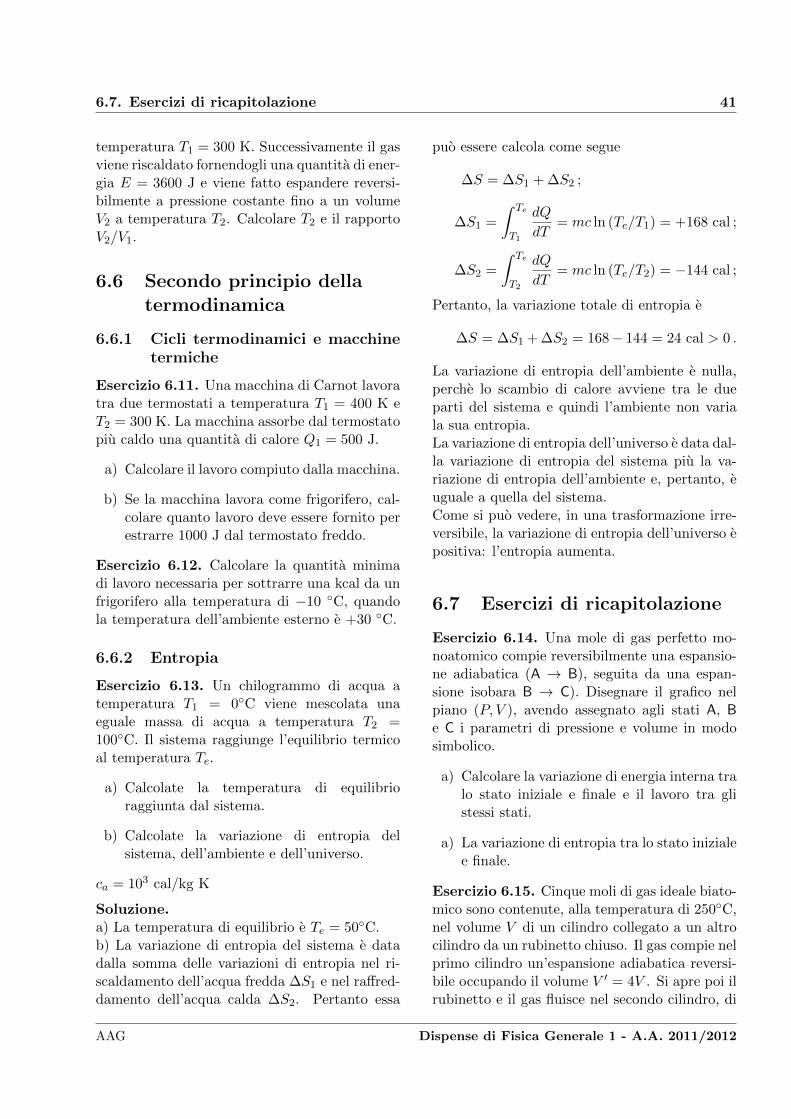
6.7. Esercizi di ricapitolazione 41
temperatura T1 = 300 K. Successivamente il gasviene riscaldato fornendogli una quantita di ener-gia E = 3600 J e viene fatto espandere reversi-bilmente a pressione costante fino a un volumeV2 a temperatura T2. Calcolare T2 e il rapportoV2/V1.
6.6 Secondo principio dellatermodinamica
6.6.1 Cicli termodinamici e macchinetermiche
Esercizio 6.11. Una macchina di Carnot lavoratra due termostati a temperatura T1 = 400 K eT2 = 300 K. La macchina assorbe dal termostatopiu caldo una quantita di calore Q1 = 500 J.
a) Calcolare il lavoro compiuto dalla macchina.
b) Se la macchina lavora come frigorifero, cal-colare quanto lavoro deve essere fornito perestrarre 1000 J dal termostato freddo.
Esercizio 6.12. Calcolare la quantita minimadi lavoro necessaria per sottrarre una kcal da unfrigorifero alla temperatura di −10 C, quandola temperatura dell’ambiente esterno e +30 C.
6.6.2 Entropia
Esercizio 6.13. Un chilogrammo di acqua atemperatura T1 = 0C viene mescolata unaeguale massa di acqua a temperatura T2 =100C. Il sistema raggiunge l’equilibrio termicoal temperatura Te.
a) Calcolate la temperatura di equilibrioraggiunta dal sistema.
b) Calcolate la variazione di entropia delsistema, dell’ambiente e dell’universo.
ca = 103 cal/kg K
Soluzione.a) La temperatura di equilibrio e Te = 50C.b) La variazione di entropia del sistema e datadalla somma delle variazioni di entropia nel ri-scaldamento dell’acqua fredda ∆S1 e nel raffred-damento dell’acqua calda ∆S2. Pertanto essa
puo essere calcola come segue
∆S = ∆S1 + ∆S2 ;
∆S1 =
∫ Te
T1
dQ
dT= mc ln (Te/T1) = +168 cal ;
∆S2 =
∫ Te
T2
dQ
dT= mc ln (Te/T2) = −144 cal ;
Pertanto, la variazione totale di entropia e
∆S = ∆S1 + ∆S2 = 168− 144 = 24 cal > 0 .
La variazione di entropia dell’ambiente e nulla,perche lo scambio di calore avviene tra le dueparti del sistema e quindi l’ambiente non variala sua entropia.La variazione di entropia dell’universo e data dal-la variazione di entropia del sistema piu la va-riazione di entropia dell’ambiente e, pertanto, euguale a quella del sistema.Come si puo vedere, in una trasformazione irre-versibile, la variazione di entropia dell’universo epositiva: l’entropia aumenta.
6.7 Esercizi di ricapitolazione
Esercizio 6.14. Una mole di gas perfetto mo-noatomico compie reversibilmente una espansio-ne adiabatica (A → B), seguita da una espan-sione isobara B → C). Disegnare il grafico nelpiano (P, V ), avendo assegnato agli stati A, Be C i parametri di pressione e volume in modosimbolico.
a) Calcolare la variazione di energia interna tralo stato iniziale e finale e il lavoro tra glistessi stati.
a) La variazione di entropia tra lo stato inizialee finale.
Esercizio 6.15. Cinque moli di gas ideale biato-mico sono contenute, alla temperatura di 250C,nel volume V di un cilindro collegato a un altrocilindro da un rubinetto chiuso. Il gas compie nelprimo cilindro un’espansione adiabatica reversi-bile occupando il volume V ′ = 4V . Si apre poi ilrubinetto e il gas fluisce nel secondo cilindro, di
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012

42 Capitolo 6. Termodinamica
volume V2 = V ′ inizialmente vuoto. Il sistemae termicamente isolato e con pareti rigide. Cal-colare ∆Eint e ∆S per ciascuna trasformazione.R = 8.31 J/mole K
Dispense di Fisica Generale 1 - A.A. 2011/2012 AAG
Bibliografia
[1] R.A. Serway, R. J. Beichner Principi diFisica, III Ed. EdiSES, Napoli 2002.
[2] D. Halliday, R. Resnick, J. Walker, Fon-damenti di Fisica, V Ed. CEA (Milano2001).
[3] P. Mazzoldi, M. Nigro, C. Voci Principi diFisica, II Ed. EdiSES, Napoli 2008.
[4] G. Boato, Termodinamica, CEA, Milano1987.
[5] J.R. Taylor, Introduzione all’Analisi de-gli Errori: lo studio delle incertezze nellemisure fisiche, II Ed. Zanichelli, Bologna1999.
[6] D.C. Giancoli Fisica 1, CEA, Milano 2010.
AAG Dispense di Fisica Generale 1 - A.A. 2011/2012





























