Embed Size (px)
Citation preview
Drone Cinematography
Presenter:
Nikos NikolaidisDepartment of Informatics, Aristotle University of Thessaloniki, Greece
Contributors:
Ioannis Mademlis, Chara RaptopoulouAristotle University of Thessaloniki, Greece
David BullUniversity of Bristol, UK
ICCV 2017 Tutorial on Drone Vision for Cinematography, 22/10/2017
Drone Cinematography
• Unmanned Aerial Vehicles (UAVs, or “drones”) have
made their way in the media and entertainment industry.• Movies
• TV: sports, newsgathering, documentaries
• Advertising
• Drones allow filmmakers to capture shots that were
impossible, extremely difficult or costly to capture so far:• Wide shots of remote or hard-to-reach landscapes
• Follow-along close up views of sports or other action
• Impressive fly-throughs, fly-bys and fly-overs
• Essentially drones provide a level of camera motion
freedom that was so far available only in animation
Drone Cinematography
• Value of current business services and labor that will be
replaced in the near future by drone-based solutions, in
the media & entertainment sector: $8.8bn (Source:
PricewaterhouseCoopers).
Drone Cinematography in Movies
• Example: rooftop motorbike chase scene from the J.
Bond film 007: Skyfall (MGM, Sony Pictures, Columbia
Pictures, 2012)
Drone Cinematography in movies
• Example: party scene from the film The Wolf of Wall
Street (Paramount Pictures, 2013)
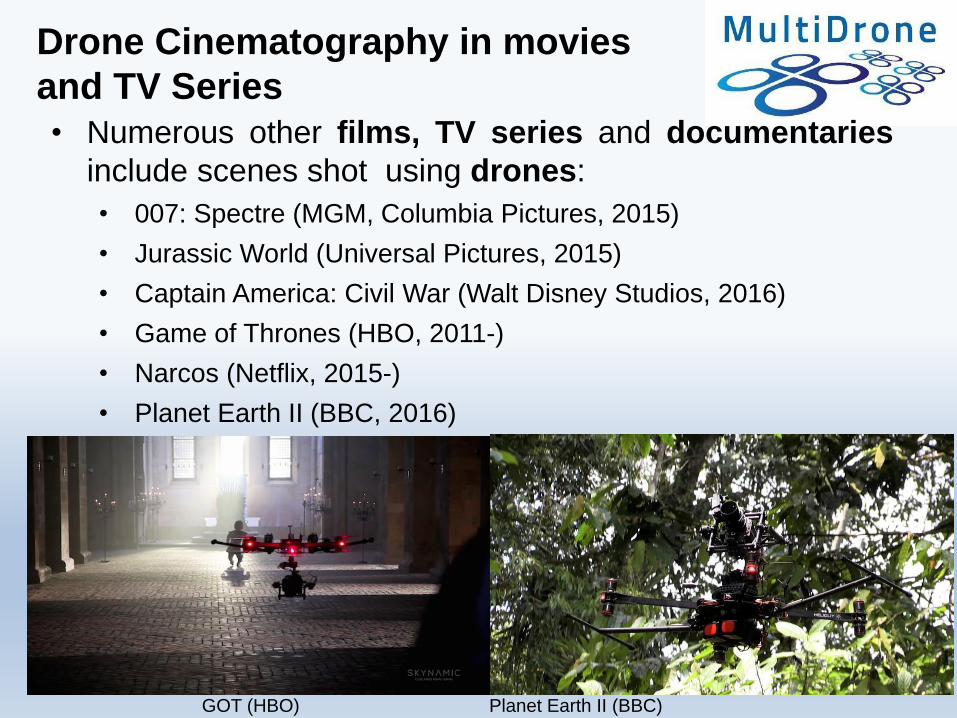
Drone Cinematography in movies
and TV Series
• Numerous other films, TV series and documentaries
include scenes shot using drones:
• 007: Spectre (MGM, Columbia Pictures, 2015)
• Jurassic World (Universal Pictures, 2015)
• Captain America: Civil War (Walt Disney Studios, 2016)
• Game of Thrones (HBO, 2011-)
• Narcos (Netflix, 2015-)
• Planet Earth II (BBC, 2016)
GOT (HBO) Planet Earth II (BBC)
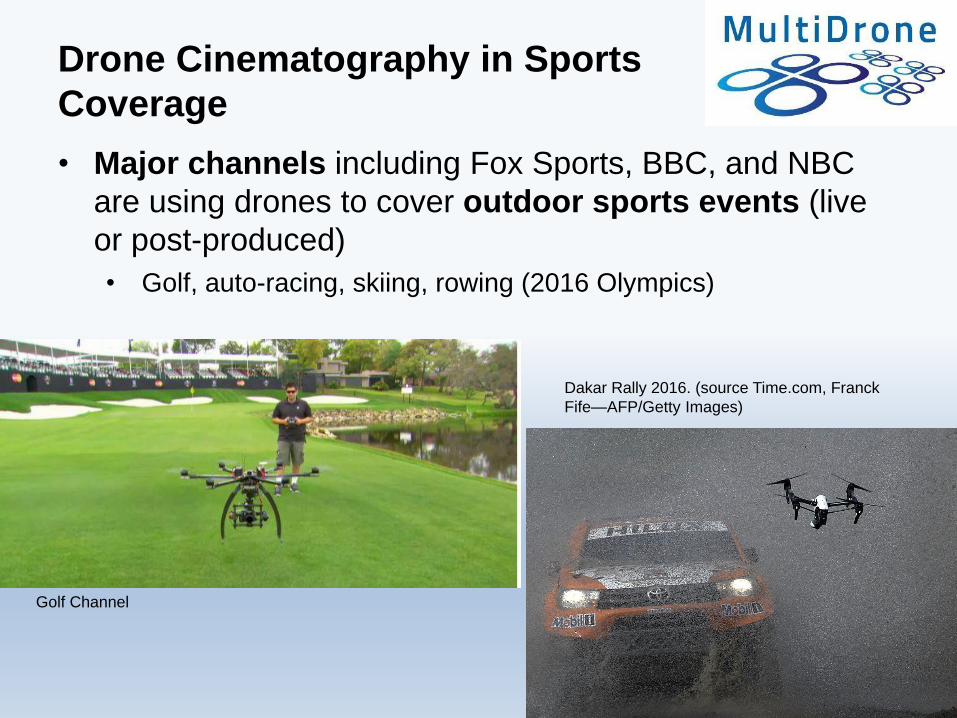
Drone Cinematography in Sports
Coverage
• Major channels including Fox Sports, BBC, and NBC
are using drones to cover outdoor sports events (live
or post-produced)
• Golf, auto-racing, skiing, rowing (2016 Olympics)
Dakar Rally 2016. (source Time.com, Franck
Fife—AFP/Getty Images)
Golf Channel

Drone Cinematography in News
• TV channels are using drones to cover large-scale
events (e.g. demonstrations), or capture videos from
war zones, natural disasters etc
War-torn Aleppo, Syria (Source: AMC) Moscow protest
https://dronelife.com/2014/04/01/
the-positives-and-negatives-of-drone-journalism/
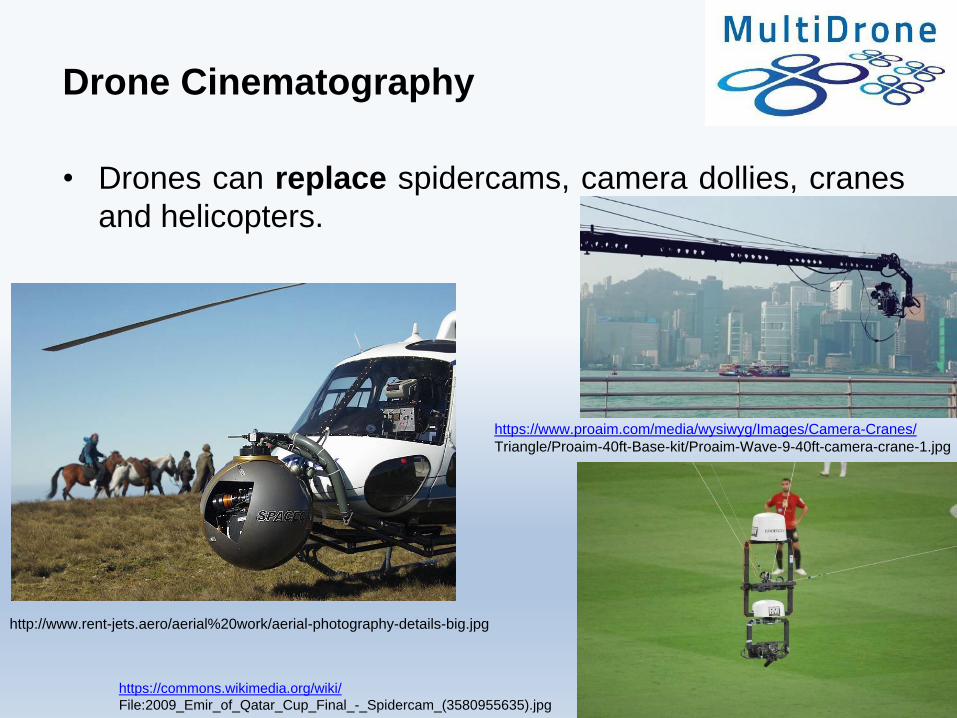
Drone Cinematography
• Drones can replace spidercams, camera dollies, cranes
and helicopters.
https://commons.wikimedia.org/wiki/
File:2009_Emir_of_Qatar_Cup_Final_-_Spidercam_(3580955635).jpg
http://www.rent-jets.aero/aerial%20work/aerial-photography-details-big.jpg
https://www.proaim.com/media/wysiwyg/Images/Camera-Cranes/
Triangle/Proaim-40ft-Base-kit/Proaim-Wave-9-40ft-camera-crane-1.jpg
Drone Cinematography
• UAVs advantages over dollies, cranes and helicopters:
• Reduced cost
• Cost of renting a helicopter for a few hours equals the cost of
buying a well-equipped drone.
• Fast and adaptive shot setup
• Access to narrow spaces, versatility, flights close to humans
and buildings
• Fewer legal and safety restrictions compared to helicopters
• Novel aerial shot types
• Continuous shootings with seamless transitions between very
different viewpoints/environments
• E.g.: the camera moves from ground level to several meters above
ground and then indoors, in a single shot
Drone Cinematography
• The media and entertainment industry has already
praised the contribution of UAVs in modern
cinematography:
• A number of drone companies (DJI, PictorVision, Aerial MOB, Flying
Cam, etc) won a 2017 Emmy Award for Technology and
Engineering for their Low Latency Remote Controlled Airborne Video
Platforms for Television
• G. Hooper and P. George of HoverCam were awarded a 2013
Academy of Motion Picture Arts and Sciences (AMPAS) Technical
Achievement Award for the Helicam miniature helicopter camera
system.
• E. Prévinaire, J. Sperling, E. Brandt and T. Postiau were awarded a
2013 AMPAS Scientific and Engineering Award for the Flying-Cam
SARAH 3.0 system
UAV Cinematography
• UAV cinematography is mainly derived from traditional
ground and aerial cinematography, but must also take
into account UAV-specific limitations, capabilities,
properties
• A visual vocabulary of UAV cinematography can be
defined, consisting in:
• Shot types
• Combinations of framing shot types + UAV/camera motion types
• Composition principles
• Central Composition
• Rule of Thirds
• Lighting rules
• Depth-of-Field / Focus settings
© 2009, Jim Zuckerman
UAV Cinematography
• Need to define a standardized UAV shot type
taxonomy.
• Actual drone footage and related articles / guidelines
were used to this end:
• A total of 8 framing (static) shot types and 23 UAV/camera
motion types suitable for UAV media production have been
identified
• Camera motion types were clustered into groups according to
their characteristics
• Visually pleasing combinations of framing shot types and
camera motion types were identified
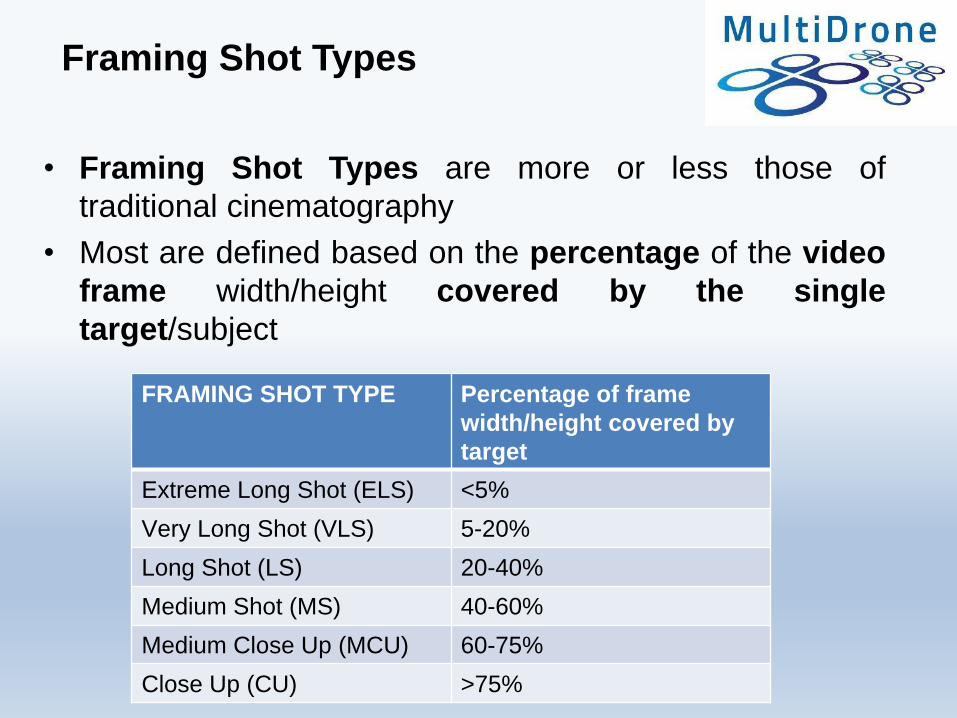
Framing Shot Types
• Framing Shot Types are more or less those of
traditional cinematography
• Most are defined based on the percentage of the video
frame width/height covered by the single
target/subject
FRAMING SHOT TYPE Percentage of frame
width/height covered by
target
Extreme Long Shot (ELS) <5%
Very Long Shot (VLS) 5-20%
Long Shot (LS) 20-40%
Medium Shot (MS) 40-60%
Medium Close Up (MCU) 60-75%
Close Up (CU) >75%
Framing Shot Types
• A couple of Framing Shot Types deal with two or more
subjects / targets:
• 2 Shot/3 Shot: 2/3 subjects appear on frame, equally visible
(typically LS or MS)
• Over the Shoulder (OTS): Adapted from traditional
cinematography OTS. Main target fully visible secondary target
visible at the video frame edge.
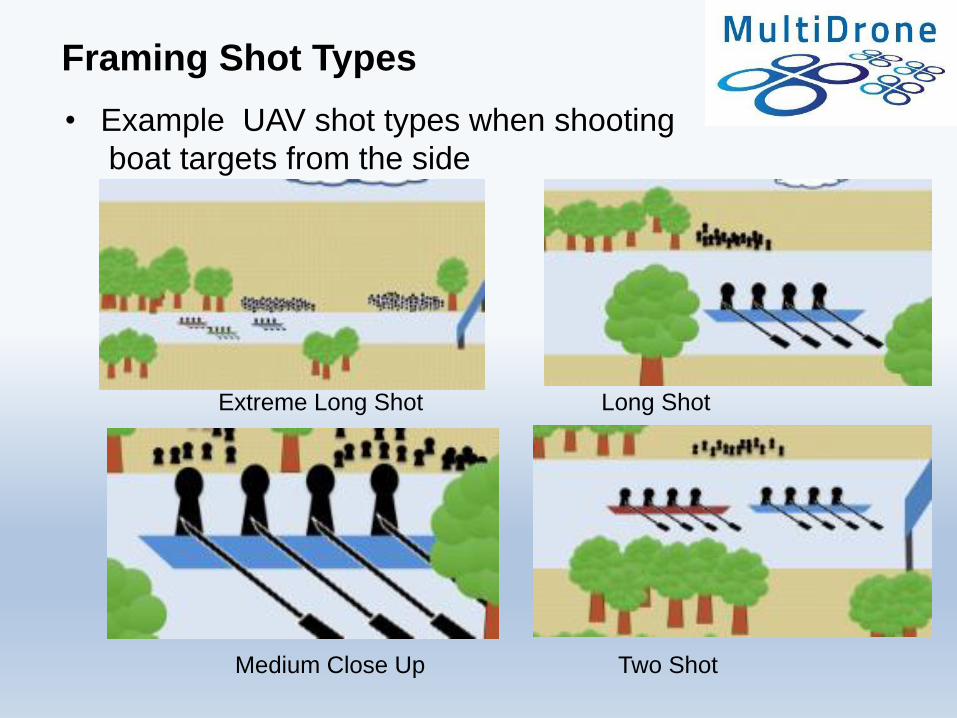
Framing Shot Types
• Example UAV shot types when shooting
boat targets from the side
Extreme Long Shot Long Shot
Medium Close Up Two Shot
UAV / Camera Motion Types
• Typical UAV trajectories along with coordinated camera
motions were identified
• UAV/camera motion types can be considered as either
“scene-oriented” or “target-oriented”
• Four groups of UAV/camera motion types were defined:
• Static shots (6): no UAV motion, target may or may not be
present
• Static Shot (SS)
• Static Shot of Still Target (SSST)
• Static Shot of Moving Target (SSMT)
• Static Aerial Pan (SAP)
• Static Aerial Tilt (SAT)
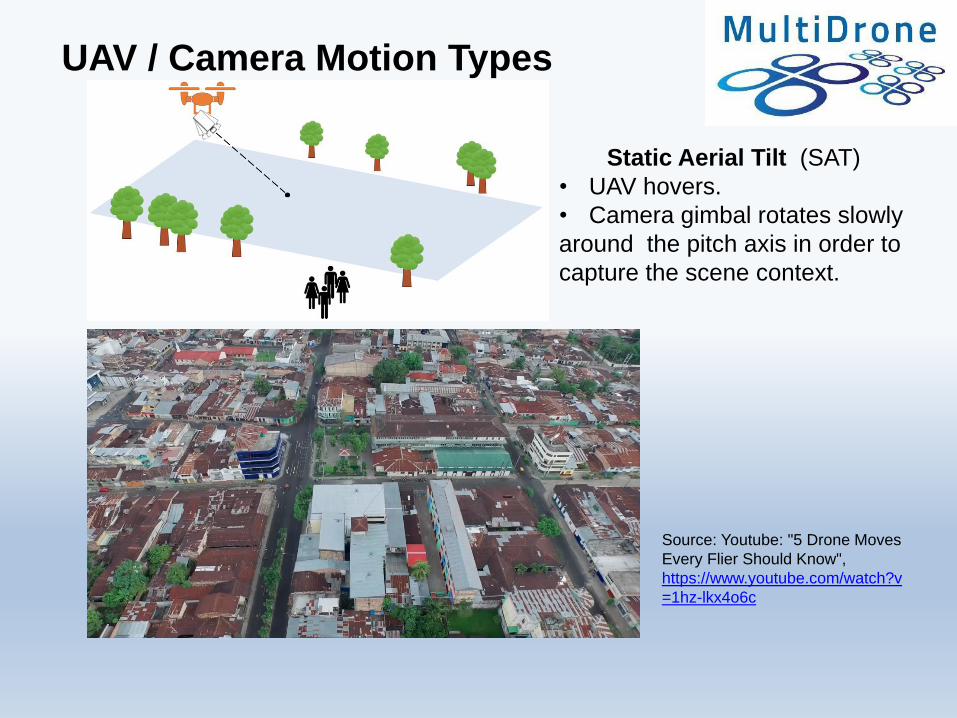
UAV / Camera Motion Types
Source: Youtube: "5 Drone Moves
Every Flier Should Know",
https://www.youtube.com/watch?v
=1hz-lkx4o6c
Static Aerial Tilt (SAT)
• UAV hovers.
• Camera gimbal rotates slowly
around the pitch axis in order to
capture the scene context.
UAV / Camera Motion Types
• Dynamic shots (6): moving UAV, no target
• Moving Aerial Pan or Tilt (MAP, MAT)
• Pedestal/Elevator Shot (PS)
• Bird’s Eye Shot (BIRD)
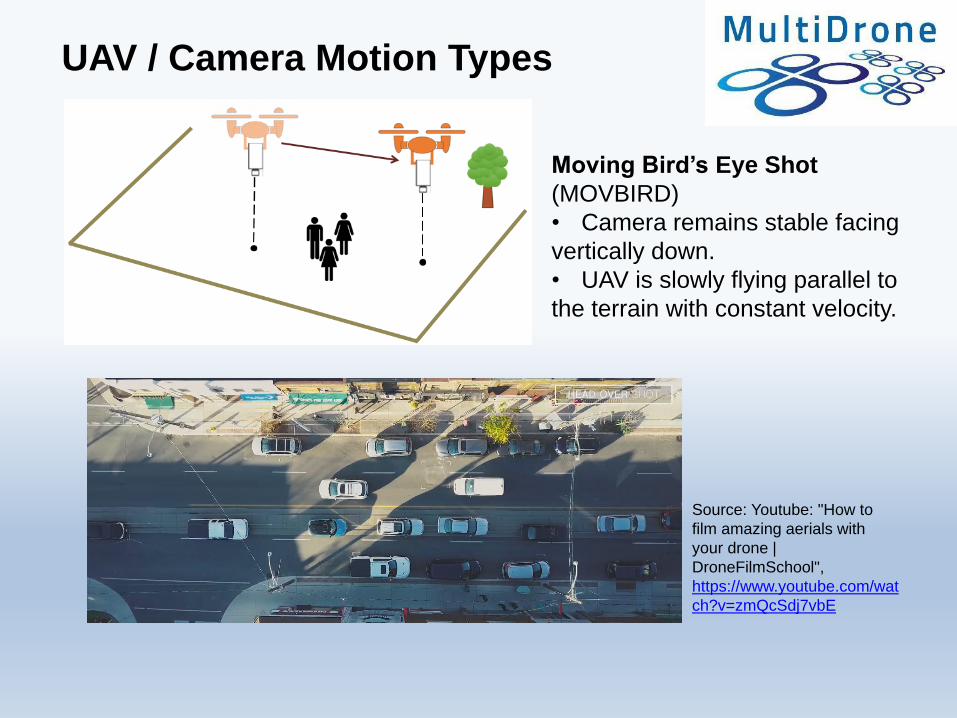
• Moving Bird’s Eye Shot (MOVBIRD)
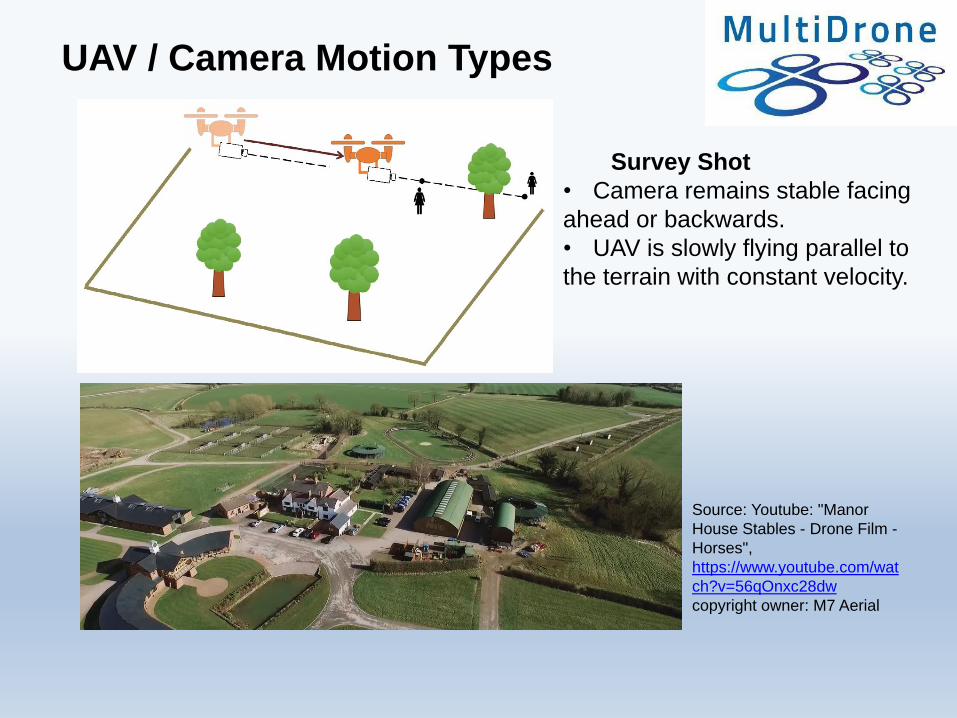
• Survey Shot (SURVEY)
• Fly-Through (FLYTHROUGH)
UAV / Camera Motion Types
Source: Youtube: "How to
film amazing aerials with
your drone |
DroneFilmSchool",
https://www.youtube.com/wat
ch?v=zmQcSdj7vbE
Moving Bird’s Eye Shot
(MOVBIRD)
• Camera remains stable facing
vertically down.
• UAV is slowly flying parallel to
the terrain with constant velocity.
UAV / Camera Motion Types
Source: Youtube: "Manor
House Stables - Drone Film -
Horses",
https://www.youtube.com/wat
ch?v=56qOnxc28dw
copyright owner: M7 Aerial
Survey Shot
• Camera remains stable facing
ahead or backwards.
• UAV is slowly flying parallel to
the terrain with constant velocity.
UAV / Camera Motion Types
• Target Tracking shots (8): UAV motion depends on target
motion
• Moving Aerial Pan with Moving Target (MAPMT)
• Moving Aerial Tilt with Moving Target (MATMT)
• Lateral Tracking Shot (LTS)
• Vertical Tracking Shot (VTS)
• Orbit (ORBIT)
• Fly-Over (FLYOVER)
• Fly-By (FLYBY)
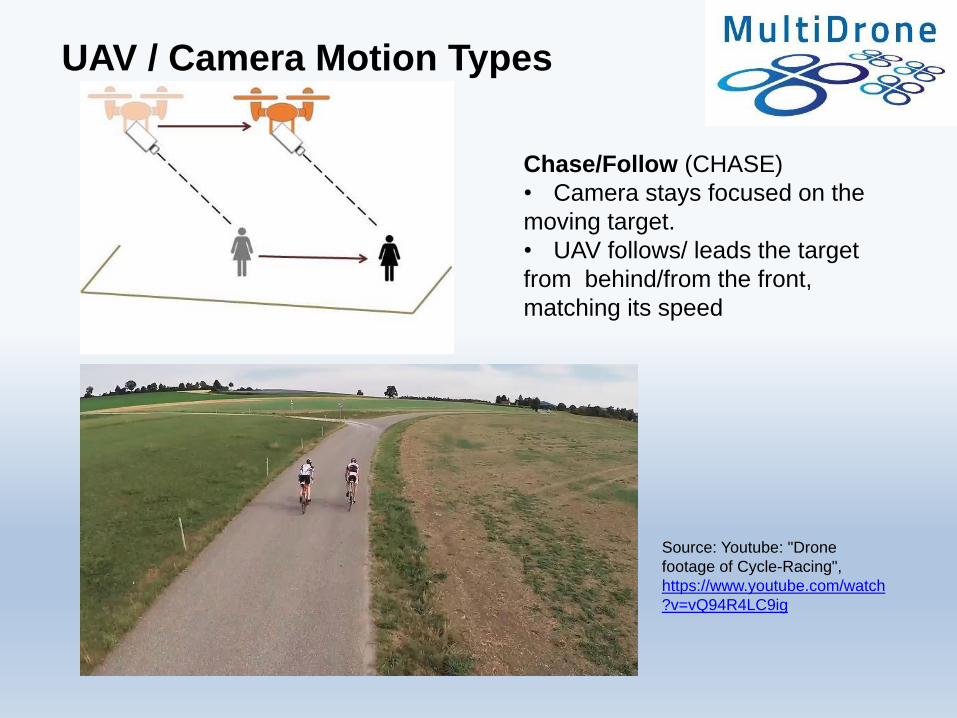
• Chase/Follow Shot (CHASE)

UAV / Camera Motion Types
Source: Youtube: "5 Drone Moves
Every Flier Should Know",
https://www.youtube.com/watch?v
=1hz-lkx4o6c
Lateral Tracking Shot (LTS)
• Camera stays focused on the
moving target.
• UAV flies sideways/ in parallel to
the target, matching its speed
UAV / Camera Motion Types
Source: Youtube: "Drone
footage of Cycle-Racing",
https://www.youtube.com/watch
?v=vQ94R4LC9ig
Chase/Follow (CHASE)
• Camera stays focused on the
moving target.
• UAV follows/ leads the target
from behind/from the front,
matching its speed
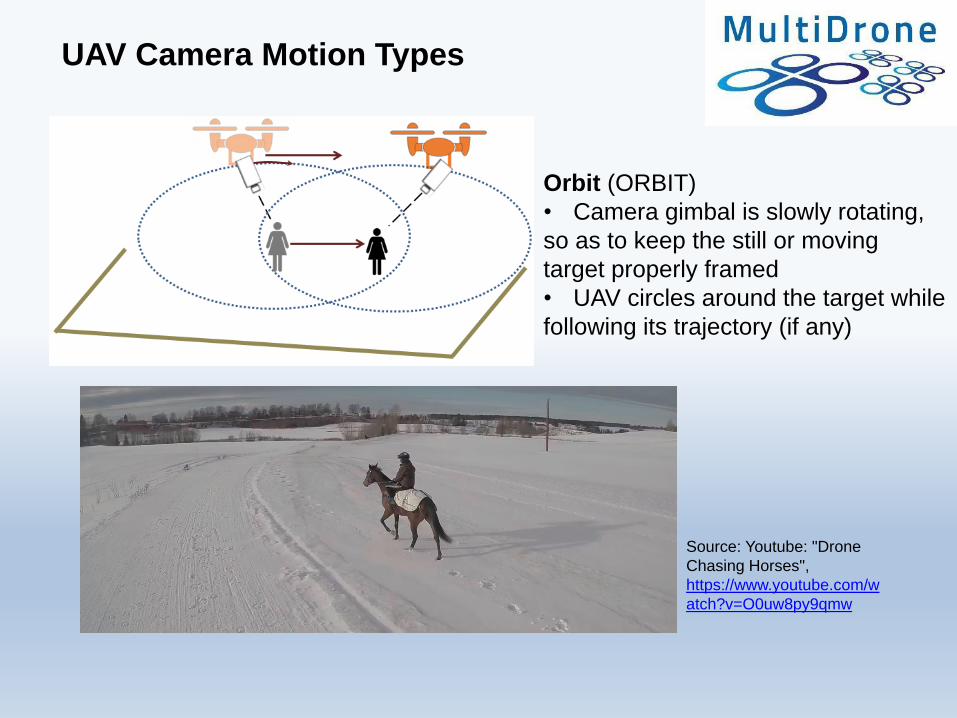
UAV Camera Motion Types
Source: Youtube: "Drone
Chasing Horses",
https://www.youtube.com/w
atch?v=O0uw8py9qmw
Orbit (ORBIT)
• Camera gimbal is slowly rotating,
so as to keep the still or moving
target properly framed
• UAV circles around the target while
following its trajectory (if any)
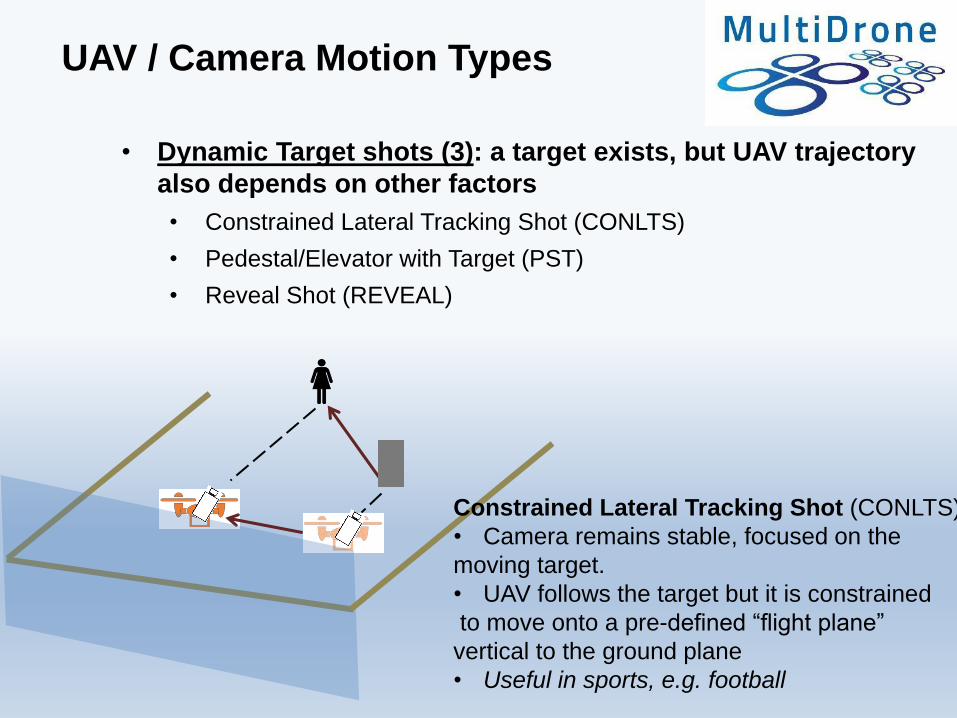
UAV / Camera Motion Types
• Dynamic Target shots (3): a target exists, but UAV trajectory
also depends on other factors
• Constrained Lateral Tracking Shot (CONLTS)
• Pedestal/Elevator with Target (PST)
• Reveal Shot (REVEAL)
Constrained Lateral Tracking Shot (CONLTS)
• Camera remains stable, focused on the
moving target.
• UAV follows the target but it is constrained
to move onto a pre-defined “flight plane”
vertical to the ground plane
• Useful in sports, e.g. football
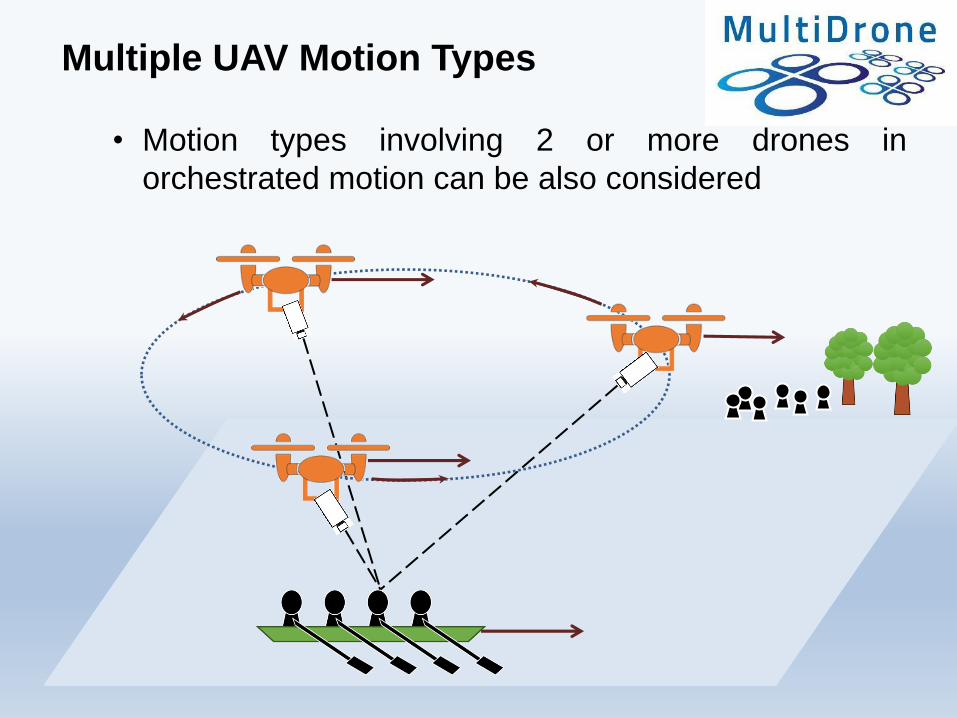
Multiple UAV Motion Types
• Motion types involving 2 or more drones in
orchestrated motion can be also considered
UAV Motion Type Modeling
• The drone trajectories and the camera gimbal motions
of the identified UAV motion types can be modeled
mathematically, using two coordinate systems:
• A global, fixed, World Coordinate System (WCS)
• A Target Coordinate System (TCS), attached and moving
along with the target.
• Such a modelling can prove useful for several tasks e.g
drone path planning and control.
UAV Motion Type Modeling
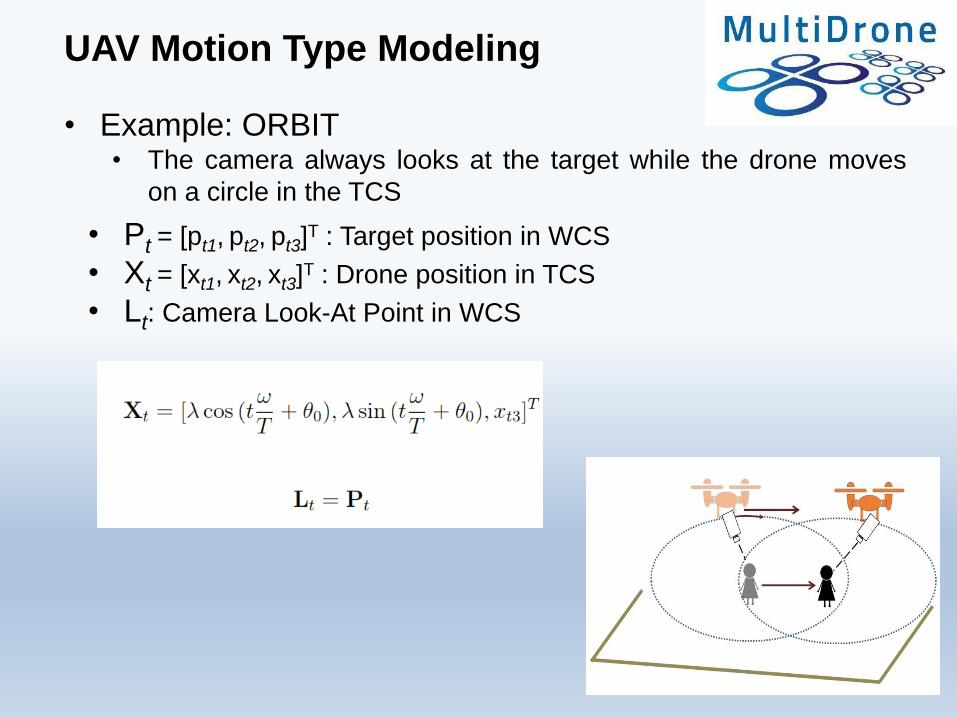
• Example: ORBIT• The camera always looks at the target while the drone moves
on a circle in the TCS
• Pt = [pt1, pt2, pt3]T : Target position in WCS
• Xt = [xt1, xt2, xt3]T : Drone position in TCS
• Lt: Camera Look-At Point in WCS
Tools of the Trade
• A UAV cinematographer has the following means for
achieving a certain framing shot type or UAV/camera
motion type or for transitioning between types:
• UAV location and orientation
• Camera orientation through gimbal control (usually 3 degrees
of freedom: roll, pitch, yaw)
• Camera focal length
Tools of the Trade
• Certain shot types can be obtained by more than one
camera / UAV configurations.
• The simplest, less energy consuming shall be chosen.
• Obtaining a certain framing shot type can simply be
achieved by setting the focal length f (zoom level)
• Zoom in to obtain a Medium Close Up
• The same shot type can be achieved by moving the
drone with respect to the subject
• More complex and consumes battery power
Tools of the Trade
• Certain UAV/camera motion types can also be
approximately materialized by means of changing only
the camera/gimbal configuration
• These approximations can/shall be preferred due to a
number of reasons:
• Inability to fly along the trajectory specified by the motion type
(e.g. due to proximity to humans)
• Inability to match the target speed
• Power consumption considerations
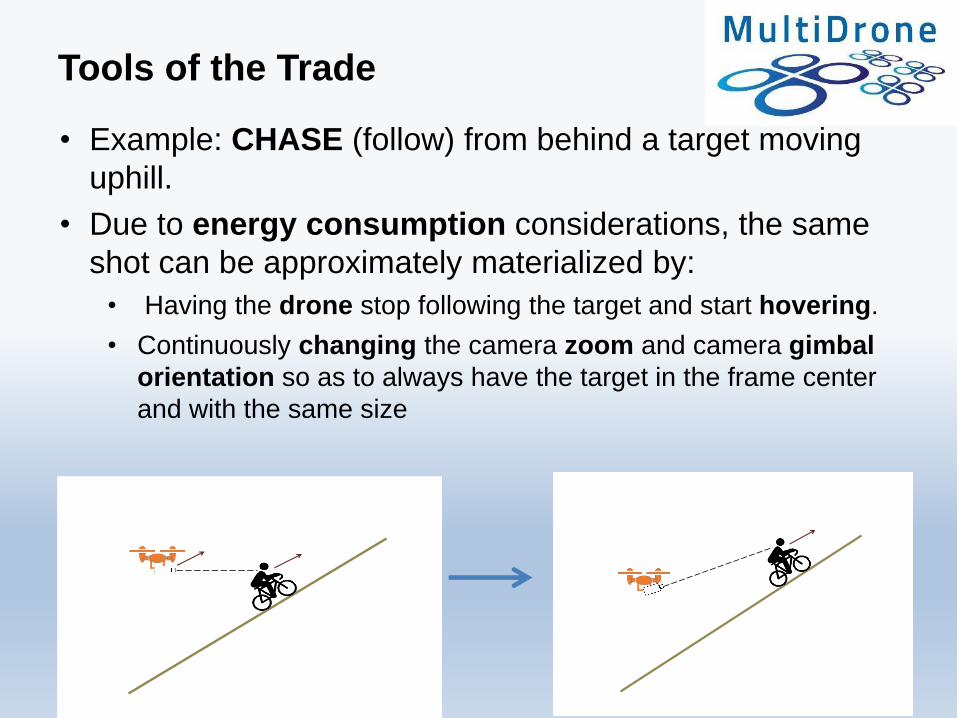
• Example: CHASE (follow) from behind a target moving
uphill.
• Due to energy consumption considerations, the same
shot can be approximately materialized by:
• Having the drone stop following the target and start hovering.
• Continuously changing the camera zoom and camera gimbal
orientation so as to always have the target in the frame center
and with the same size
Tools of the Trade
Current State of the Art,
Limitations & Challenges
• Current state of the art in UAV cinematography: single
drone, manually operated• Two persons are needed for professional productions: drone
operator, cameraman
• Single-UAV shooting limitations:
• A single target/subject can be captured at each time instance
• The target may only be captured from a specific viewpoint
and with specific shot type (e.g., Close-Up) at a given time
instance
• When UAV travels from one location to another to e.g. aim at a
different target the corresponding video might not be useful for
broadcasting.
Current State of the Art,
Limitations & Challenges
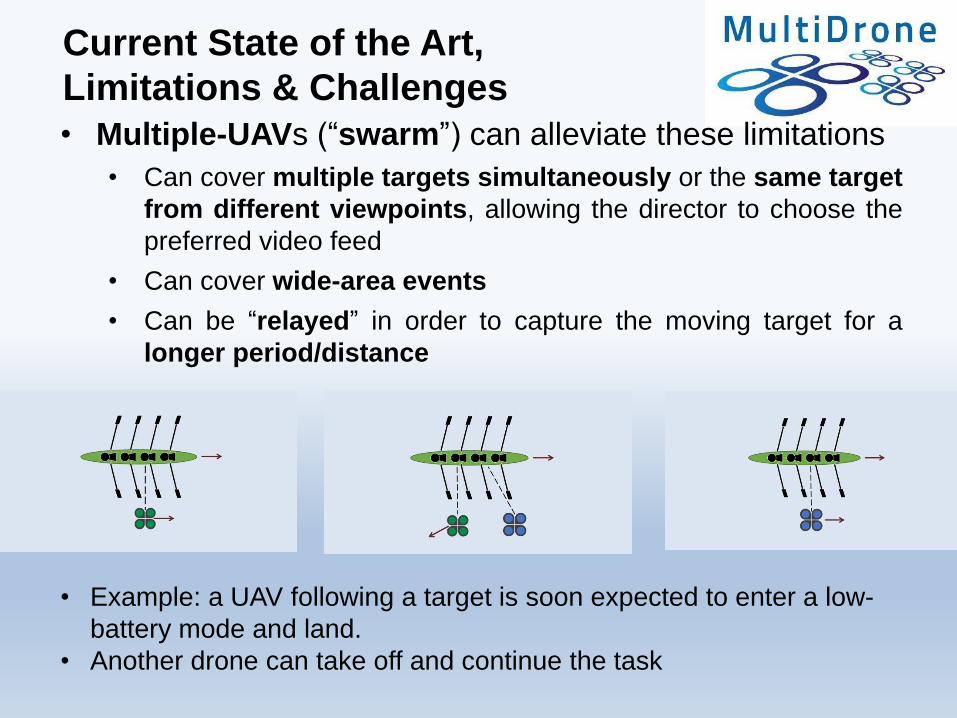
• Multiple-UAVs (“swarm”) can alleviate these limitations
• Can cover multiple targets simultaneously or the same target
from different viewpoints, allowing the director to choose the
preferred video feed
• Can cover wide-area events
• Can be “relayed” in order to capture the moving target for a
longer period/distance
• Example: a UAV following a target is soon expected to enter a low-
battery mode and land.
• Another drone can take off and continue the task
Current State of the Art,
Limitations & Challenges
• Multiple-UAVs shooting challenges:• Drone to drone collision avoidance
• Avoid having one drone entering the field of view of another
drone
• Coordination
• Crew size increase
Current State of the Art,
Limitations & Challenges
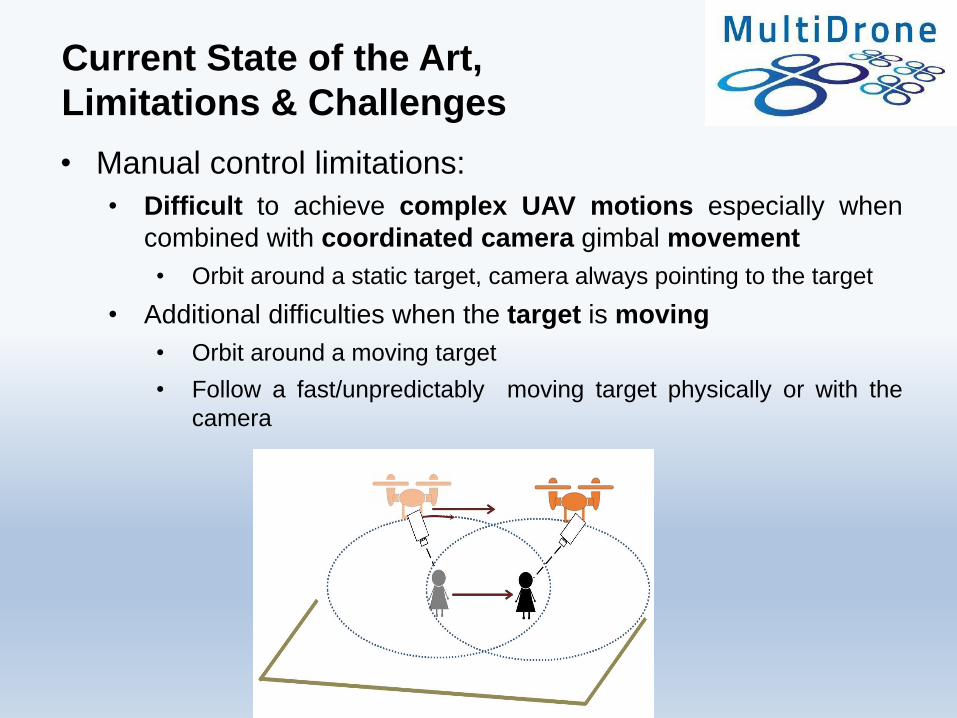
• Manual control limitations:
• Difficult to achieve complex UAV motions especially when
combined with coordinated camera gimbal movement
• Orbit around a static target, camera always pointing to the target
• Additional difficulties when the target is moving
• Orbit around a moving target
• Follow a fast/unpredictably moving target physically or with the
camera
Current State of the Art,
Limitations & Challenges
• Autonomous / intelligent drone/camera operation can
solve those issues or greatly facilitate drone/camera
control.
• Many technologies, sensors and research areas are
involved
• Cameras (standard, stereo, depth, infrared), Lidars, ultrasonic
sensors, GPS on the target
• Vision and machine learning on the generated data, path
planning, control, etc
• Moving target detection and 2D /3D tracking
• Detection of events (e.g. fall of a cyclist) and points of interest
• Automatic planning and execution of shots
• Automatic framing/camera control
• Rule of 3rds or central composition
• avoid having a drone in the field of view of the other
• 180 degrees rule
• Selection of the most informative or best framed video stream
Current State of the Art,
Limitations & Challenges
• The technology is already here!
• Example: DJI Phantom 4 Pro can:
• Physically follow a moving target from behind or from the
side
• Orbit around a moving target by just using the roll stick
• Follow (lock) a moving target with the camera while the drone
moves under the operator commands
• Recognize various targets such as humans, bikes or
motorcycles
• Obvious questions that need to be answered: accuracy,
failure rates and robustness in:
• Cluttered environments
• Dynamic scenes with harsh/changing lighting conditions
• Fast and unpredictably moving targets
UAV / Camera Motion Types
• Each UAV/camera motion type requires a certain
technology level to be performed autonomously
• Three technology levels can be identified:
• “Minimum”: No visual data analysis or 3D target localization
information is required for shooting such motion types.
• Example: scene-oriented shots with simplistic UAV trajectories
• “Vision”: Visual data analysis is required
• “Vision+3D”: Both visual data analysis and 3D target (and
drone) localization are needed
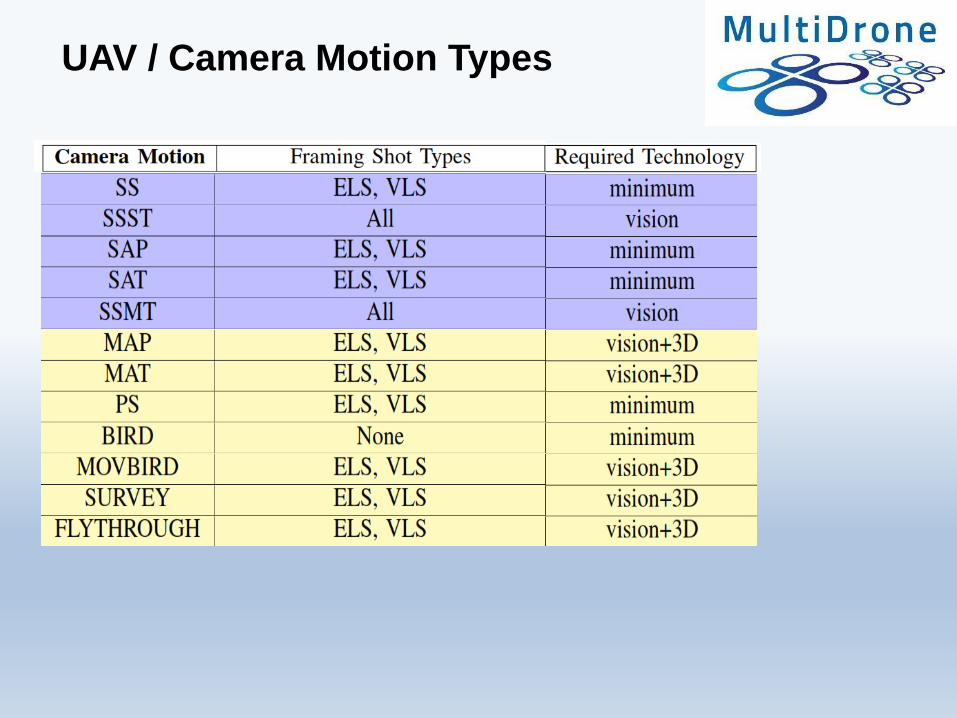
UAV / Camera Motion Types
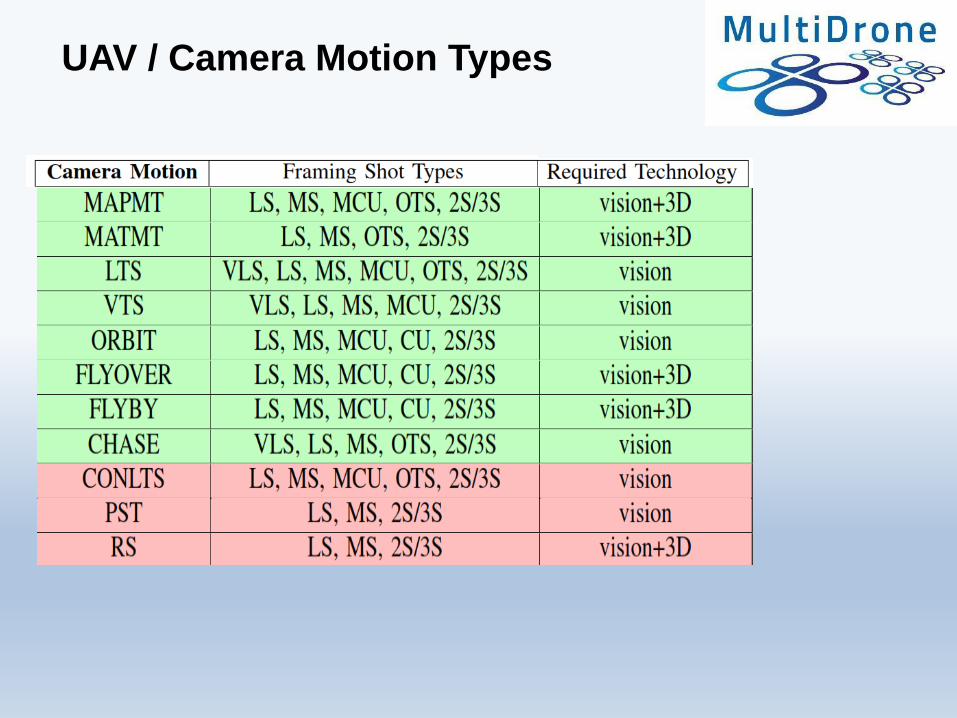
UAV / Camera Motion Types
Research and Products
• Automated / intelligent UAV cinematography has
recently arise as an interesting R & D area
• Algorithms and software products have been developed
for automating aspects of drone flight and shooting,
while obeying cinematographic restrictions and director
guidelines
• The field lies at the intersection of:• Aerial cinematography
• Aerial robotics
• Computer vision/machine learning
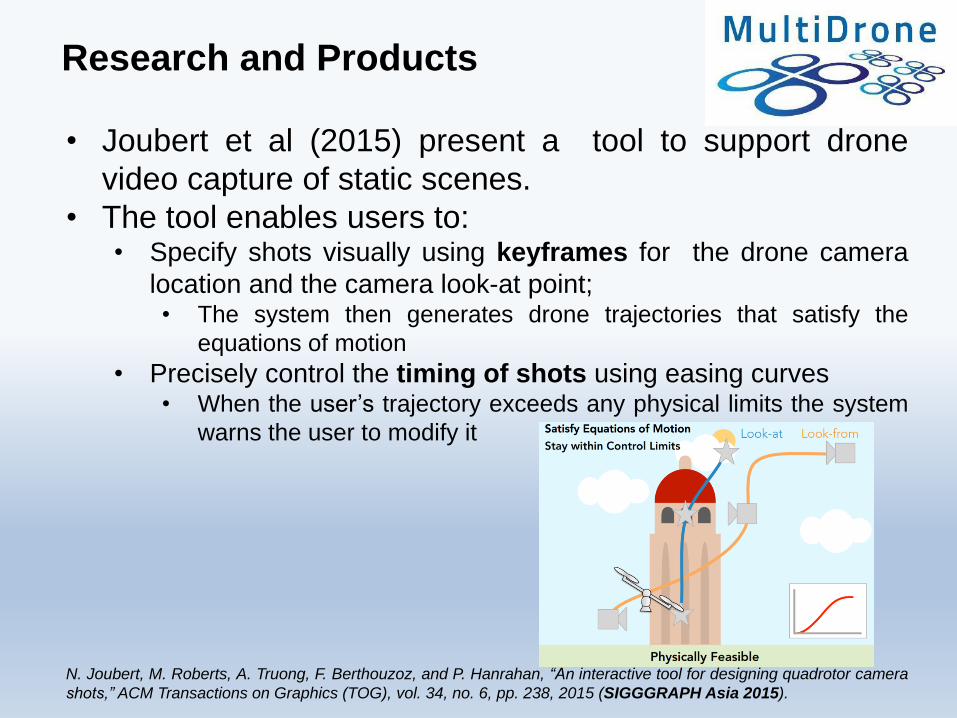
Research and Products
• Joubert et al (2015) present a tool to support drone
video capture of static scenes.
• The tool enables users to:• Specify shots visually using keyframes for the drone camera
location and the camera look-at point;• The system then generates drone trajectories that satisfy the
equations of motion
• Precisely control the timing of shots using easing curves• When the user’s trajectory exceeds any physical limits the system
warns the user to modify it
N. Joubert, M. Roberts, A. Truong, F. Berthouzoz, and P. Hanrahan, “An interactive tool for designing quadrotor camera
shots,” ACM Transactions on Graphics (TOG), vol. 34, no. 6, pp. 238, 2015 (SIGGGRAPH Asia 2015).
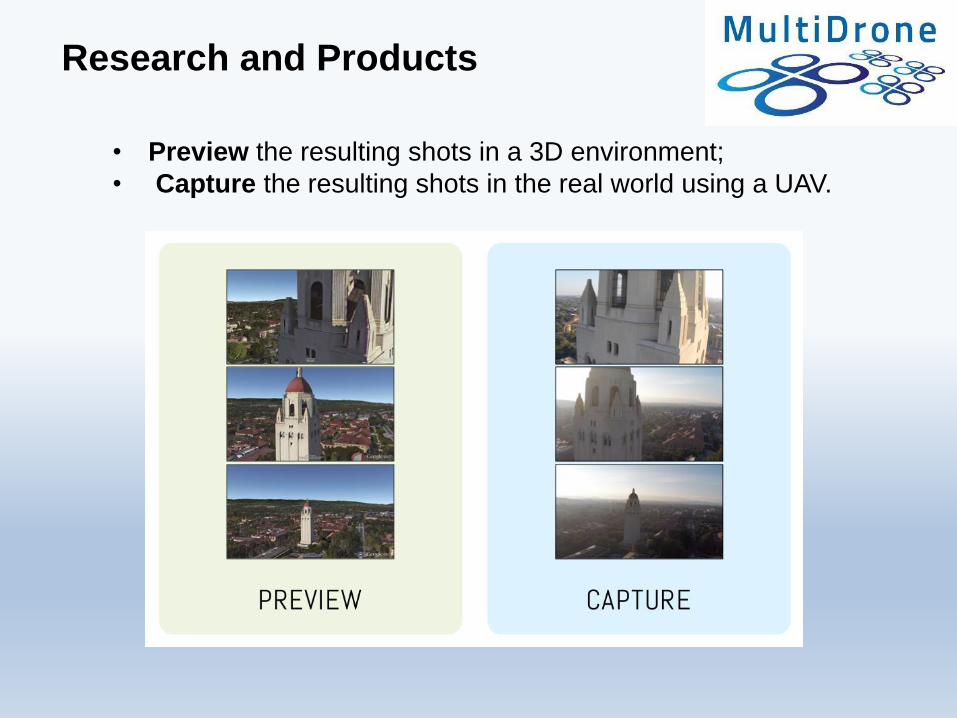
Research and Products
• Preview the resulting shots in a 3D environment;
• Capture the resulting shots in the real world using a UAV.
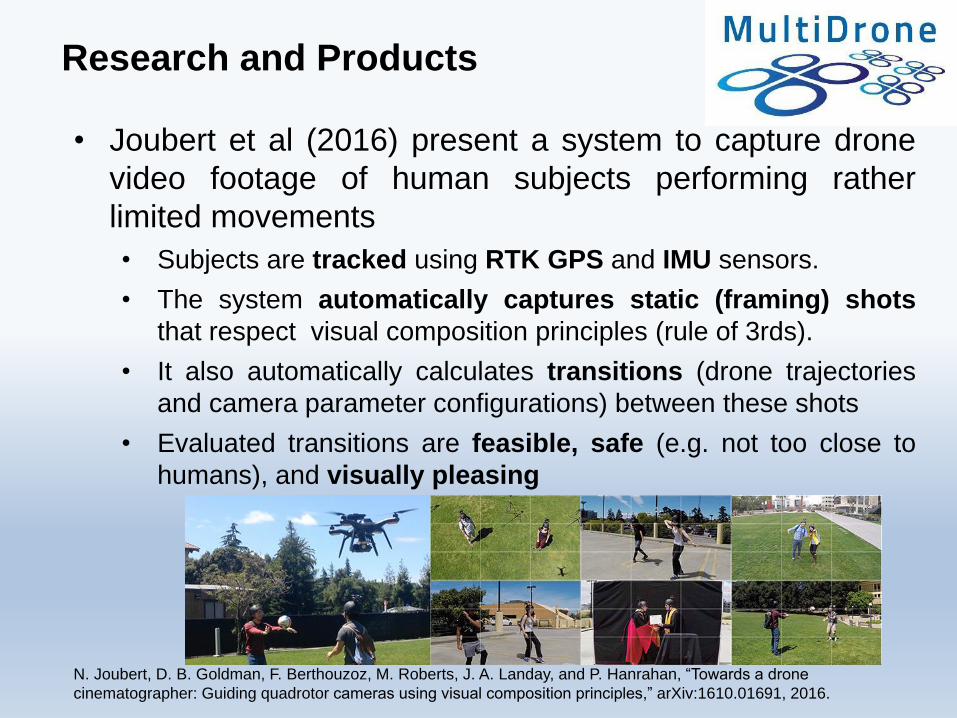
Research and Products
• Joubert et al (2016) present a system to capture drone
video footage of human subjects performing rather
limited movements
• Subjects are tracked using RTK GPS and IMU sensors.
• The system automatically captures static (framing) shots
that respect visual composition principles (rule of 3rds).
• It also automatically calculates transitions (drone trajectories
and camera parameter configurations) between these shots
• Evaluated transitions are feasible, safe (e.g. not too close to
humans), and visually pleasing
N. Joubert, D. B. Goldman, F. Berthouzoz, M. Roberts, J. A. Landay, and P. Hanrahan, “Towards a drone
cinematographer: Guiding quadrotor cameras using visual composition principles,” arXiv:1610.01691, 2016.
Research and Products
• Roberts and Hanrahan (2016) propose a method that re-
times a user-defined physically infeasible UAV
trajectory
• Infeasible: it does not respect the dynamics and physical limits
of the UAV
• The output is a trajectory of the same geometry,
guaranteed to be physically feasible, as similar as
possible to the user’s input
• The user can preview the result in a 3D environment
and also capture the video in the real world using a
UAV.
[Roberts2016]: M. Roberts, P. Hanrahan. “Generating dynamically feasible trajectories for quadrotor cameras”, ACM
Transactions on Graphics, vol. 35, no. 4, 2016 (SIGGRAPH 2016).
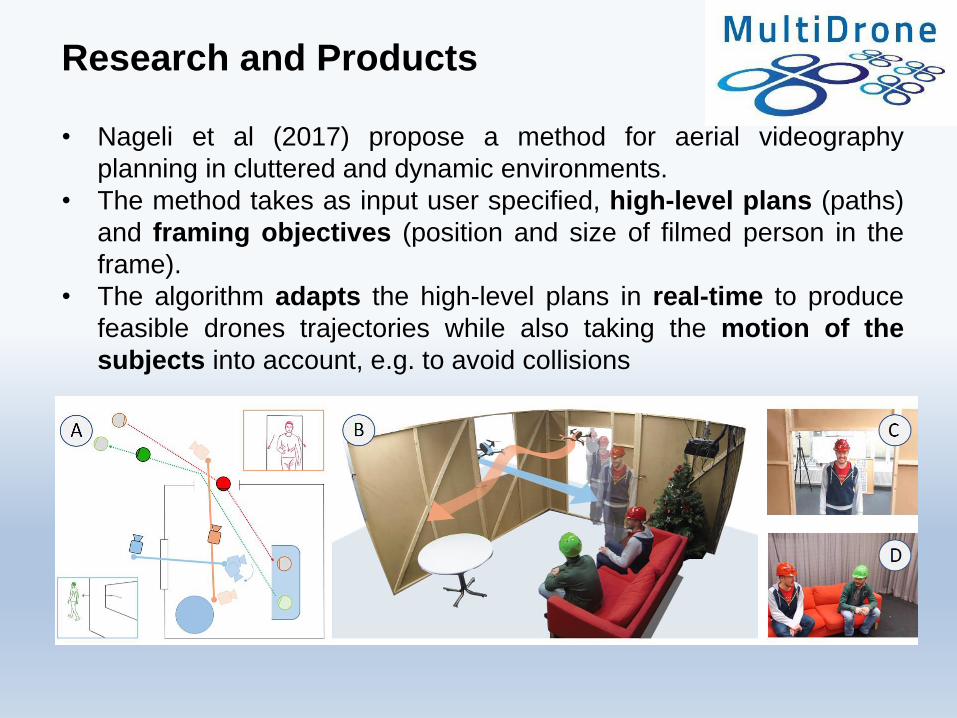
Research and Products
• Nageli et al (2017) propose a method for aerial videography
planning in cluttered and dynamic environments.
• The method takes as input user specified, high-level plans (paths)
and framing objectives (position and size of filmed person in the
frame).
• The algorithm adapts the high-level plans in real-time to produce
feasible drones trajectories while also taking the motion of the
subjects into account, e.g. to avoid collisions
[Nageli2017b]: T. Nageli, L. Meier, A. Domahidi, J. Alonso-Mora, O. Hilliges, “Real-time Planning for Automated Multi-
view Drone Cinematography”, ACM Transactions on Graphics, vol. 36, no. 4, pp. 132:1-132:10, 2017.
[Nageli2017a]: T. Nageli, J. Alonso-Mora, A. Domahidi, D. Rus, O. Hilliges, “Real-Time Motion Planning for Aerial
Videography With Dynamic Obstacle Avoidance and Viewpoint Optimization”, IEEE Robotics and Automation Letters,
vol. 2, no. 3, pp. 1696-1703, 2017.
Research and Products
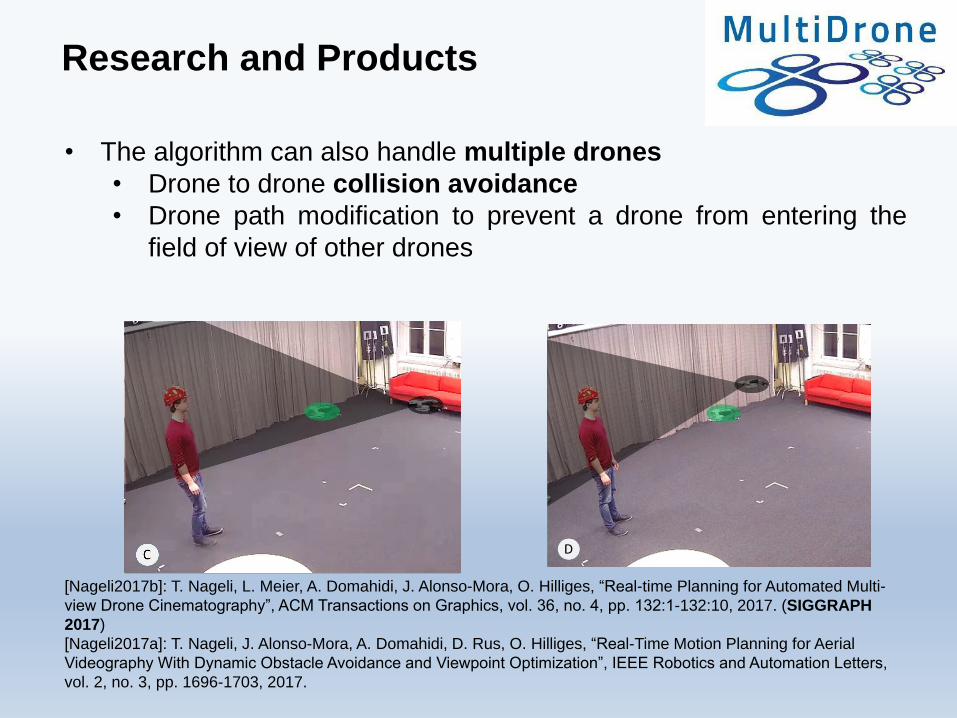
• The algorithm can also handle multiple drones
• Drone to drone collision avoidance
• Drone path modification to prevent a drone from entering the
field of view of other drones
[Nageli2017b]: T. Nageli, L. Meier, A. Domahidi, J. Alonso-Mora, O. Hilliges, “Real-time Planning for Automated Multi-
view Drone Cinematography”, ACM Transactions on Graphics, vol. 36, no. 4, pp. 132:1-132:10, 2017. (SIGGRAPH
2017)
[Nageli2017a]: T. Nageli, J. Alonso-Mora, A. Domahidi, D. Rus, O. Hilliges, “Real-Time Motion Planning for Aerial
Videography With Dynamic Obstacle Avoidance and Viewpoint Optimization”, IEEE Robotics and Automation Letters,
vol. 2, no. 3, pp. 1696-1703, 2017.
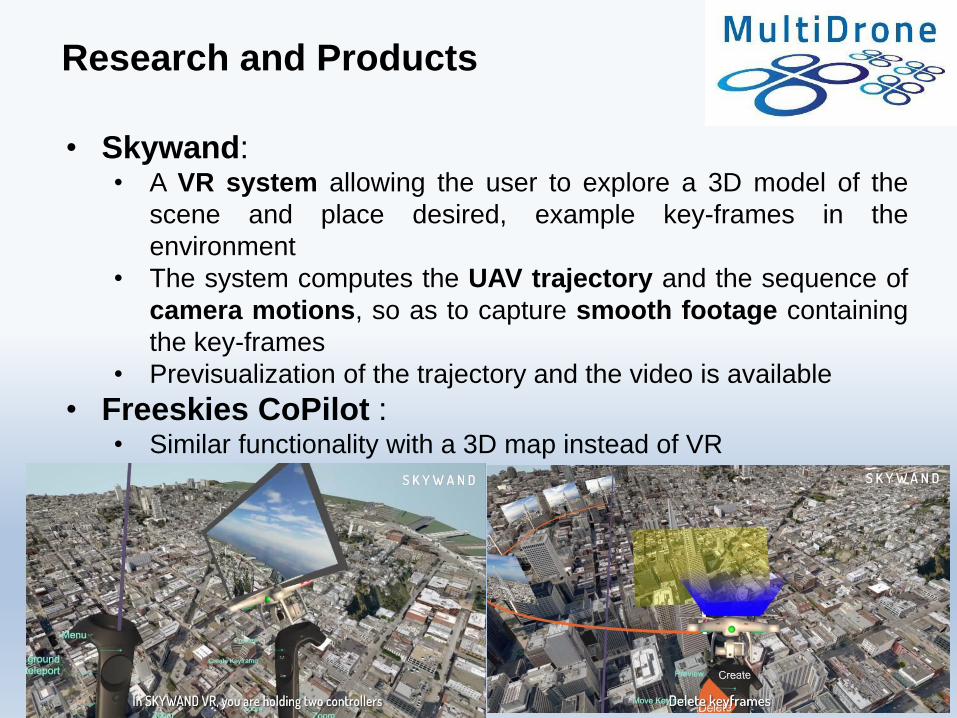
Research and Products
• Skywand:• A VR system allowing the user to explore a 3D model of the
scene and place desired, example key-frames in the
environment
• The system computes the UAV trajectory and the sequence of
camera motions, so as to capture smooth footage containing
the key-frames
• Previsualization of the trajectory and the video is available
• Freeskies CoPilot :• Similar functionality with a 3D map instead of VR
Open Issues
• What traditional cinematography rules persist in
UAV cinematography?
• What traditional rules can or should be broken to
create engaging / interesting videos?
• What opportunities are there for new rules of
cinematography, new shot types, camera
movements and visual effects?
• Shall preserve / enhance narrative and engagement,
creating a wow factor while preserving viewing quality and
comfort.
• Establish a grammar & taxonomy of drone
cinematography
• How these new visual paradigms can influence
visual narrative?
Open Issues
• What are the operating envelopes for the involved
parameters that lead to acceptable / engaging
visual results?
• Drone movement and speed relative to the target
• Camera zoom factor & orientation and their rate of
change
• Target dynamics
• What is the effect of errors (target tracking errors,
drone position and orientation errors) in the visual
results?
• Subjective and, if possible, objective tests and metrics are
needed
• Media professionals shall be consulted
Open Issues
• What are the appropriate types of transitions
between different shots?
• How one can use the new capture and display
formats (360 video, VR, plenoptic) within the scope
of UAV cinematography?
Tools and Research Needed
• R& D in computer vision and machine learning
• Intuitive and informative graphical user interfaces
for planning the drone and camera/gimbal
movements
• Tools (simulators) for the pre-visualization of the
drones trajectories and the videos acquired by the
cameras
Grazie Mille!