Embed Size (px)
Citation preview

ENERGY TRANSFERS IN THE SPINAL ENGINE
S.A. Gracovetsky and S. lacono
Received December 1985, accepted June 1986
ABSTRACT Locomotion is generally perceived as being the&&ion of the legs. The tissues comprise the basic engine of locomotim. This theory i.s consistent trunk is cons&red to be carried along in a more or less passive way. Thlis with available experimental data which suggest that the motion of the spine p$ndur hypothesis appears to have been accepted with little substantiation. precedes that of the legs. Indeed, the variations in the power hlivered to In light of the nunmous observations contradicting this view, we have the pelvis by the spine are strikingly similar to, but slightly ahead of; the proposed an alternative hypothesis in which the spine and its surrounding variation in power at the hip.
Keywords: Musculoskeletal system, spine, biomechanics
INTRODUCTION
The most common and repetitive voluntary movement performed by humans is walking’. Biomechanical analyses of gait traditionally begin with a systematic measurement of limb motion, and the information accumulated to date is con- siderable. A problem arises when all the data are combined in an attempt to explain the mechanism that makes us walk. Various important patterns that are invariable with walking speed have been iden- tified and discussed’, although no one has explained why this should be so.
The importance of energy conservation in loco- motion was recognized early, but the correspondence between natural cadence and maximum efficiency has not been widely accepted’. There is also disagreement concerning the methods used to calculate the energy efficiency of the walking process4.
Our objections to current attem data into a generalized theory o P
ts to integrate gait vertebrate
locomotion are based on the following.
1. Human gait is analysed as a particular case of the vertebrate locomotion process. Conversely others have analysed animal locomotion (dogs, cats) from the quadrupedal point of views. It appears that no attempt has been successful in generating a theory of locomotion which could encompass all vertebrates.
2. The repetitive nature of gait generating cyclic forces should be apparent when examining specimens. Pathology should indicate which parts are prone to wear. Hence, we ought to consider the clues given to us by pathology. This does not appear to have been done either.
3. We have some difficulty in accepting blindly
Concordia University and Diagnospine Research Inc., Montreal, Quebec, Canada Reprints from Dr S. Gracovetsky, Associate Rofessor, Department of Electrical Engineering, Sir George Williams Campus, 1455 de Maisonneuve Boulevard West, Montreal, Quebec HSG 1 MS, Canada
0 1987 Butterworth & Co (Publishers) Ltd 0141-5425/87/020099-16 $03.00
the notion of the fundamental importance of the legs in the locomotion process. Let us clarify this. Consider the calf muscle. It is certainly useful, but is it essential? We suggest it is not: this is further demonstrated by ‘walking’ on our knees or on stilts. We can then repeat this analysis with other components of the musculoskeletal system in an attempt to identify the minimum number of parts fundamentally necessary for locomotion. This is not an academic question; such an understanding is essential to the establishment of priorities in the rehabilitation of severely handicapped people.
It is this desire to explore the essentials of vertebrate locomotion that has led us to propose a somewhat unconventional theory of locomotior+~’ in which we proposed that the spine is the essential component in vertebrate locomotion, and pro- ceeded to analyse the kinds of spinal motion which will maneouvre an animal in its environment. We discussed the conditions under which the primitive lateral flexion of the spine inherited from our fish ancestors had to be complemented by the acquisi- tion of flexion-extension to permit the quadruped to gallop.
To understand better the biomechanical rationale of this important evolutionary step, we considered the experiments of Lovet?, who, as early as 1903, showed that a flexible rod already bent in one plane will induce an axial torque when simulta- neously flexed in a different plane. This funda- mental property of any flexible rod is exploited in the human spine. The combination of lateral flexion and flexion-extension of the spine, together with spinal lordosis, has been experimentally demon- strated to generate an axial torque estimated to be sufficient to drive the pelvis’. Once the pelvis is driven, we can argue that the legs will follow.
Admittedly, the evidence presented in reference 7 is insufficient to prove this hypothesis. This paper is intended to provide finther arguments in support of this idea. First, we analyse the response of the intervertebral joint at the I+, level as the spine moves during locomotion. The variation of power
J. Biomed. Eng. 1987, Vol. 9, April 99

Spinal engine: S.A. Gracovetsky and S. Iacono
transmitted at each step is then estimated and compared with the variation of power measured by others at the hip joints. If it is indeed true that the spine is an engine, the consequences could be far- reaching.
Low back pain is the major cause of work-related disabilities. If the function of the spine is that of a bridge linking the pelvis to the shoulders, one may conceive of particular rehabilitation procedures and surgical interventions. If, on the other hand, the spine is part of an engine driving the pelvis, these rehabilitation procedures will have to be modified. Re d*f$
airs to a spinal bridge will undoubtedly require 1 erent techniques than those to a spinal engine.
Thus, it is important to appreciate the mechanical aetiology leading to the various pathologies seen in the lumbar intervertebral joints of cadavers.
THE MECHANICAL AETIOLOGY OF LOW- BACK DISORDERS
Some confusion exists as to the definition of the aetiology of low-back disorders. For example, a popular aetiological finding is the notion of a slipped or herniated disc. First, we should note that a ‘slipped’ disc is believed to be one that ‘moves’ either posteriorly or anteriorly during motion, yet this has never been shown to be true through pathological examination. A herniated disc is not an aetiological finding because it is the consequence of one of several other problemsg-ll. Hence, a herniated disc should be classified as a symptpm, not an aetiology. Furthermore, as this particular symptom is too vague to permit the precise identification of the primary injury, effective corrective action cannot be prescribed. We must be more specific in the diagnosis.
As early as 1969, Farfan1z-14 proposed that the various clinically-observed symptoms could be the result of two basic sequences of pathological processes as follows.
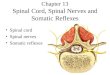
1. Central damage to the disc with fracture of varying magnitudes of the end plate, followed by an in-growth of vascular granulation tissue through the fracture into the disc nucleus. This results in the gradual destruction of the avascular nucleus and inner annulus. In the early stages, the facet joints are not greatly affected. At a later stage, with continued loss of volume of the nucleus, the disc loses its height and the facet joints subluxate. Arthritic changes appear but are rarely severe. The outer annulus survives and is gradually pushed out from between the end plates (F&we 1).
2. Peripheral damage occurring simultaneously to both the disc and the facet joints is observed. The annulus is avulsed from the end plate and its laminae become separated, while the central portion of the disc and the end plate remain intact. At a later stage, the annulus develops radial fissures, while the nucleus remains relatively untouched. The changes in the facet joints are severe, and the intervertebral joint may become unstable (Figure 1).
Figure 1 Top, compression injury: the endplates of L,-L, have cracked and the nucleus (white dye) injected into the vertebral body. Note that the annulus is intact. Bottom, torsion injury: the top disc has been subjected to torque overload in the laboratory. Note the separation of the annular layer. Compare this with the bottom disc, a clinical observation. Notice the marked layer separation. Note as well that the nucleus (dyed) has migrated through the damaged layers toward the outside of the annulus. Such a disc is often incorrectly termed ‘degenerated’. It is, in fact, a repeated injury which, if sustained, would have led to the escape of the nucleus into the canal
These types of damage can be reproduced in the laboratory by subjecting a joint to excessive compression or torsion. Hence, we shall refer to them as compression and torsion injuries, respec- tively. This mechanical aetiology of low back pain is not universally accepted, although there seems to be a consensus that torsional injuries are respon- sible for a wide variety of symptoms attributed to ligamentous damage. This damage may be to either the annulus fibrosus (as a cause for nuclear herniation) or to capsular ligaments of the facets.
100 J. Biomed. Eng. 1987, Vol. 9, April

Spinal engine: S.A. Gracovetsky and S. Iacono
VirgirP demonstrated some 35 years ago that the nucleus pulposus does not herniate when the joint is subjected to axial compression. Many other researchers repeated this experiment and found the same results. Furthermore, Shirazi-AdP provided the theoretical explanation for these observations. Nonetheless it is interesting to note the importance that the biomechanical literature has assigned to compression injuries”.
The damaging effect on the joint that many resear- chers have attributed to axial compression is further contradicted by the force plate data col- lected on volunteer runners’*. In these exper- iments, the compressive pulse at heel-strike during a 100 m sprint was seen to reach up to 9 x body weight. Theoretically, enough compressive force (> 3000 N) would be generated in the spine to cause fissures in the vertebral end plate (w 2000-3000 N)i9. Since it appears that athletes do not routinely damage their spines, one must conclude that there are serious inconsistencies in the prevailing conception of the spine as a passive supporting structure easily endangered by excessive compressive force.
An examination of the literature also reveals further arguments in favour of the importance of compressive forces of the spine, such as those experienced at work”. It is generally true that the heavier a load to be lifted, the eater the com- pression force at the LJS, join t!r O. As one can show an increase in lumbar spine injuries concurrent with the weight of the load to be lifted, it was proposed that the increase in the compressive force at LJS, was responsible for the increase in spinal injuries. This, we suggest, is a violation of the basic rule of logic; namely, for the events A, B and C:
if A -+ B (load increase + compression increase)
if A --* C (load increase + increase in injury),
then it is wrong to claim that the relation
B --* C (compression increase -+ increase in injury)
is always true. As long as compression is perceived to be the important variable in spinal injury, the conclusion B + C may appear unavoidable even if unproven, despite the many attempts that have been made to explore the possibility.
For example, Adams and Hutton9 analysed the response of the intervertebral joint to a combina- tion of axial compression and hyperflexion in the sagittal plane. They reported disc herniation as being the end result of many loading cycles. In view of the extreme ranges of hyperllexion required to cause an injury, one wonders if such in vitro
experiments are truly representative of the in uiuo situations encountered in the working environment.
So far, the experimental evidence suggests that pure axial compression does not lead to disc herniation. Since the disc herniates when the load
increases, another mechanism must be responsible for it.
Farfan suggested torsion was one factor in the degeneration of the disc which might lead to annular tear and disc herniatiorP. Our logical representation can therefore be extended to read as follows:
A -+ B (load increase + compression increase)
A + D (load increase -, increase in torsion of the spine)
A + C (load increase ---, increase in injury)
One can appreciate that the increase in injury can also be linked to the consequences of the increase in axial torsion. That is, the spinal injury may result from a combination of the axial compression and axial torsion which are present in the spine whenever a worker carries a load while walkir&*. If we accept the view that severe low back pain may be a consequence of torsional injury, we must also explain why the spine has been permitted exposure to torsion throughout the evolutionary procesP1~23. If we consider the skeleton of ‘Lucy’, discovered in 1974 and estimated to be three million years old, we notice that the pelvic and lumbar regions are remarkably similar to those of a modern-day woman. This suggests that the locomotion process was acquired a long time ago and has remained stable over the past few million years24.
Hence, it is difficult to argue that features such as lordosis, pelvic inclination and the like are temporary weaknesses resulting from our evolution toward another form of erect stance. From the shape of the vertebrae of ‘Lucy’, one can propose that lordosis is a stable acquisition unique to our species. This must reflect an evolutionary benefit of fundamental importance to our bipedal mode of locomotion. Our theory suggests that lordosis is an integral component of our spinal engine. It is necessary to convert the primitive lateral bend of the fish into an axial torque driving the pelvis. Hence, we postulate that locomotion might be the important evolutionary advantage requiring torsion within the spine. The difficulty therefore lies with appreciating the kind of forces that act upon the spine during walking and running.
REVIEW OF THEORETICAL ANALYSES
Current biomechanics of walking According to current theories of bipedal locomotion, the legs do all the work. This system (the legs) is very conservative from an energy standpoint 1,4J5-28. These references illustrate the importance of energy transfer and the vast array of possible hypotheses which have been formulated to evaluate the energy exchange between segments and the efficiency of the walking process.
This determination is acceptable for the ankle joint
J. Biomed. Eng. 1987, Vol. 9, April 101

Spinal engine: S.A. Gramvetsky and S. Iama
and the knee1~27. At the hip joint, however, the situation becomes somewhat confused. What is the ligament of B&low doing there? What about psoas? How is the pelvis driven? This illustrates some of the difficulties encountered when deciding how the various parts of the body interact.
Moreover, one key issue remains in evaluating the extent to which the elastic storage of energy in muscle can be recovered to execute positive work. Cavagna et ~1.‘~ proposed a level of storage as high as 50% of recovery, although no direct evidence for this has been presented. In short, this problem has not been resolved nor has provision been made for the spinal contribution towards the energy transfer occurring between segments, although it has been estimated’ that the sizeable posterior ligamentous system should store energy comparable to the poten- tial energy variation of the centre of gravity during each cycle.
An excellent discussion of this problem is found in reference 29. Based upon the work of Cavagna, an index called ‘recovery’ is used as a measure of the energy efficiency of walking (65%) and running (0%). It is difficult to accept that running is achieved with a near zero energy efficiency process. Hence, we must consider the arguments presented in reference 29 which suggest that the ability of the musculoskeletal system to store energy in stretched li aments has not been considered. Since the index o P energy ‘recovery’ appears to be a poor repre- sentation of the energy efficiency of the muscu- loskeletal system, the view that our musculoskeletal system ‘walks’ with an energy efficiency of 65% must be greeted with considerable scepticism. In fact, those values should be considered represen- tative of the lowest margin of the actual efficiency of walking and running.
Remarkably, when a kangaroo, for instance, switches from a four-legged ‘walk’ to its familiar two-legged hop, its total energy consumption, as measured by its oxygen intake, actually decreases! Its recovery also decreases. Quite clearly, there must be some form of elastic storage improving the efficiency of the a.nimalz9. A similar storage mechanism is believed to prevail in human locomotion.
In most studies, the head, arms, and trunk masses are usually lumped together and are not assigned any essential function to the mechanics of walking. We have profound reservations to such a mathematical representation because we can see that the motion of the shoulders cannot be hampered without disturbing the locomotion process, e.g. people with fused spines exhibit gait modifications. Vertical displacement of the centre of gravity of the body becomes incomprehensible. Why not flex the knees more in order to clear the ground rather than lift the entire trunk? Newton’s law of motion encourages the smoothest possible trajectory for the centre of gravity. There must be some clear evolutionary advantage to such a strong interaction in the gravitational field, e.g. as
evidenced by the requirement that a runner be airborne during most of his stride.
Furthermore, from a philosophical point of view, only with great difficulty do we think of the trunk, arms and head as ‘passive’ elements in the locomo- tion process. It would be a waste of muscular mass not to use them in some essential way, instead of having to ‘drag’ them about while walking and running.
Locomotion as a product of an oscillating system The idea of modelling human gait according to a resonating mechanical device is not neti”*31, but these devices do not support our belief that gait is achieved through minimum energy. The best example of these devices is known as the ballistic walking model that, once started, is able to continue moving entirely under the action of graviv9. These studies have lead to the conclusion that gravity plays a fundamental role in the locomotion process, and although this ballistic model fails to satisfactorily explain the phenomenon of running, it does high- light the importance of pelvic motion. We suggest that, although the inverted pendulum model, the ballistic model or similar approaches have their merit, they were developed to fit data accumulated on the motion of the legs without consideration for spinal contribution. In our opinion, the difficulties common to all these researchers30-32 indicate that a fundamental element, namely the spine, is missing from their equations if their systems are to operate at a minimum level of energy expenditure.
Modelling the spinal sub-system We are aware of the existence of other models of the pelvis/trunk/shoulders sub-system33. We consider these models to be incomplete because there is no evidence of a proper modelling of the spinal ligaments. One review of the literature on the analysis of flexion-extension indicates that the posterior ligamentous system is considered to be of little relevance33-36. This can be traced to the earlier work of Bartelink34, who simplified his spinal model so that the calculations could be processed by the computer systems available at that time.
These anatomically incomplete models were subse- quently adopted by Morris and Chaffin in order to propose means of avoiding lumbar spine injuries in the workplace”. Their work has been widely accepted and has contributed greatly to the acceptance of the hypothesis of the spine as a supporting column.
As more sophisticated computer systems increased the ability to handle complex calculations, the practical justification for such anatomical simplifica- tions disappeared. However, the idea that the spinal muscles are the main source of spinal power was so fascinatingj3-35 that the implications of Bogduk’s excellent anatomical descriptions37>3* were not appreciated at first. Although the structure of the posterior ligamentous system and, in particular, the lumbodorsal fascia, was predicted20*39, it took some time before a full account of the biomechanical
102 J. Biomed. Eng. 1987, Vol. 9, April

Spinal engine: S.A. Gracovetsky and S. Iacono
have conducted15v’9. However, the high correlation between calculations and experiments are ominous, since they both show that the end plate of the vertebra will rupture at approximately one-quarter of the compressive force that the disc will support. If this in vitro experiment were a valid representation of the in vivo situation, it would then mean that weightlifters lifting in excess of 50 kg would systematically injure themselves. This has not been observed. We may therefore conclude that, for example, 50-200 kg lifts cannot be accomplished with the loading configurations suggested by Shirazi-Ad1 16. Therefore, we question the use of sophisticated techniques when some very basic knowledge is missing.
2. In our previous analyses of the motion of the spine in flexion-extension”? 39, we determined that the best theoretical loading configuration is represented by a force vector substantially perpendicular to the bisector of the disc with a small shear component easily supportable by the facets. Whether this configuration is true in vivo is also a matter for debate. Because our model is so far the only representation for a 200 kg lift in which the calculated stresses do not exceed the laboratory-determined limits for biological material, we feel justified in using it in our disc calculations. The lack of adequate in uivo data justifies, in our opinion, the use of a simplified analysis.
importance of these new anatomical findings could be given40y41.
ModeIling of the intervertebral joint The response of the joint during cyclic torque applied at frequencies corresponding to 1 Hz (i.e. walking range) is known10~21, together with axial loading up to 30 kg, which represents the body weight above the joint. The response to pure compressive forces is also known10~16’33,42,43.
Cappozo determined the vertical force due to inertia at the I+, level during walking at various speeds”. However, we have no data characterizing the response of the disc in this range and type of combined loading, and it appears that no one has measured it.
Complex models using the elaborate finite element analysis technique to calculate the stresses inside the disc exist. However, two basic facts should be stressed.
1. The current representation of the annulus is debatable. A convincing model that comes close to reproducing the observed pathology has been put forth by Krauss”, however, in this case, the agreement is qualitative. Others”j do not relate their calculations to patholo to questing the usefulness o Y
therefore causing us their results. Shirazi-
Ad116l47 represented it as alternate layers bound together by a ‘ground substance’. This agrees with experimental data and has been validated for axial and torsional loading. All these models are complex because they require precise knowledge of the mechanical properties of the annulus. In addition to the disagreement of the meaning of the ‘ground substance’ between the layers of the annulus, the variation in experimental data characterizing biological material is quite large. One may wonder why such complex and precise methods of calculation are deemed necessary when models with very simple geometry can be shown to be at least as good36,48. But perhaps more importantly, finite element analysis requires a detailed description of the boundary conditions (which are the precise loading configurations of the joint), together with a precise description of the vertebral body and the annulus.
In that regard, it could be argued that these boundary conditions are related to the level of stress supported by the bony end plates. Assuming that the density of the blood supply of the end plate is an indication of its rate of metabolism, which in turn depends on the load/unload cycles to which it is subjected, these boundary conditions could be approximated qualitatively by expressing the stress at any point in the end plate as being proportional to the density of blood capillaries in the area. This apparently has not been attempted.
The current and most popular loading configura- tion of a disc subjected to pure compression was analysed by Shirazi-Ad1 16. His calculations are in close agreement with the in vitro experiments many
THE OBJECTIVE FUNCTION
In all models of this type, the problem of muscle redundancy, relative to the available degrees of freedom, is circumvented either by combining muscles into functional groups or by optimizing a criterion such as the total muscle force or mechanicochemical output36. For gait, a successful model of the legs was achieved by using a relative measure of the energy consumption.
Our previous work20~39~40 indicated that the ratio of the compression force at the bisector of the joint divided by the area of the disc (referred to as stress in the remainder of this proposal) is also important. We wrote that the motion of the spine in flexion-extension is determined by the requirement that the stress at all joints be minimized and equalized’l.
Several authors have argued that the choice of objective functions in similar optimization procedures was not critica135~49 since the erectores were deemed to have ‘the same line of action’. In fact, this conclusion is the consequence of anatomical simpification and the downgrading of both the ligamentous system and the abdominal muscles39. For example, using the compression at L, as the objective ftmction3sy49 leads us to the conclusion that it is advantageous for the spinous process at L5 to be longer than I,,, itself longer than L,. Cursory anatomical examinations indicate the opposite. Hence, there must be something
J. Biomed. Eng. 1987, Vol. 9, April 103

Spinal engine: .%A. Gracavetsky and S. Iaccm
wrong with either the objective function, the model, or both.
Furthermore, as the equations of such models are basically linear and the objective function (compression) essentially quadratic, it may be shown that the matrix defining the optimization problem is positive semi-definitc?O.
In other words, the objective function can be zeroed for non-zero values of muscular activity, meaning that a muscle can be activated while the compression at the joint is zeroed. To prevent the occurrence of such an undesirable event, artificial mathematical constraints are introduced, in this case restricting the muscle’s activity to pulling. What does such an intervention signify? Biological systems do not operate by having their parameters (here, the muscle action) continuously limited by a rigid constraint. A formulation should be found which does not require parametric constraints.
In this particular case, it can be shown that the addition of the posterior ligamentous system is sufficient in order to render the matrix positive definite. The solution becomes unique and closely simulates physiological behaviour. Whether this condition is also necessary is not known. However, our formulations using minimum and equal stress as a criterion have shown that proper function of the lumbodorsal fascia requires the spinous process of L5 to be shorter than b, with L shorter than Lxro. The pull of long issimus on the transverse process of b can be calculated to be $4 of the pull on other levels. This explains why this transverse process is markedly shorter than any of the other lumbar transverse processes.
We therefore believe that the choice of an objective function cannot be arbitrary. We further suspect that biological systems must be globally optimum; that is, the strategy that will achieve locomotion with minimum energy must also be the same as that which will achieve stress minimization and equalization. Although this conjecture has yet to be proven, the idea of stress minimization and
“;z ualization contains the concept of ‘the best use
o material’, and, as such, is a reasonable working hypothesis. This is supported by the work of Wolff 51, who showed that bone responds to stress in a specific manner: bone is added where stress is increased and removed where stress is decreased. Cowell recently confirmed these findingsSZ. We interpret these findings as meaning that a level of stress exists which maintains a stable shape. Since all vertebrae are composed of the same material, this level of stress must be equal throughout the spine. This argument can be extended to the collagen fibres of the intervertebral discsz3. Furthermore, for a given task, it is logical to have this level of stress as low as possible.
USE OF MATHEMATICAL MODELS
The use of models to describe the locomotion
process has been discussed by Patriarcos3. Our theory requires that a different function be assigned to the various parts of the pelvis/trunk/ shoulders sub-system.
The pelvis and shoulders counter-rotate as the spine flexes and extends in a predictable manner’. The control of the pelvic motion is assured by the spinal lordosis, known to determine the amount of axial torque induced by the spines.
During slow walking, the mechanical power necessary for this spinal motion is generated mainly by the lateral flexors of the spine (erectores, obliques). As walking speed increases, the vertical displacement of the centre of gravity increases to accommodate the increased energy demands. The principles of these modifications have been described’. In essence, the spine is no longer driven exclusively by the erectores and the obliques.
The hip extensors contribute to the function of the spinal engine by raising the trunk in the gravitational field. In so doing, the chemical energy consumed by the muscles is stored in potential form within the earth’s field of gravity. This potential energy is converted into kinetic energy as the trunk descends; this kinetic energy is then recovered at heel-strike, when the force generated by the decelerating trunk, descending sideways, increases the lateral flexion of the spine. Throughout this chain of events, the action of the hip extensors is similar to that of the erectores, in that they both cause lateral flexion of the spine. In that sense, the hip extensors can be considered to be lateral flexors of the s ine. From this point onwards, the sequence o F events is the same as before: namely, the coupled motion of the spine induces an axial torque which may be represented as driving the pelvis as energy is stored in the stretched spinal ligaments.
PROPOSED DESCRIPTION OF SPINAL FUNCTION
Before any actual mathematical analysis and modelling can take place for a given physical situation, certain assumptions and restrictions are inevitably made that either ‘make or break’ the model. In an effort to present true and meaningful results, these working assumptions and restrictions shall be pointed out while our model and its results are developed.
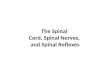
Definition of reference axes and planes Figure 2 represents the reference axes that will be used for all derivations and calculations. The XY, YZ and XZ planes will be referred to as the horizontal, lateral and sagittal planes respectively. The axial, lateral and sagittal angular displacements will be denoted by 8, x and (Y about the. Z, X and Y axes respectively. Note as well that the sign convention about each axis for torque is given by the right hand rule.
104 J. Biomed. Eng. 1987, Vol. 9, April

Spinal engine: S.A. Gracovetsky and S. Ia~ona
Figure 2 Sign convention for intervertebral force and torque. (Modified with permission from Cappozzo A. The forces and couples in the human trunk during level walking. J Biomech 1983, 16 265-277. Copyright 1983 Pergamon Journals Ltd)
The static case in the horizontal plane The ultimate goal is to arrive at the distribution of torque at an intervertebral joint in all three planes, since an intervertebral joint is a three-dimensional physical system. To begin the analysis, we will only consider the torque distribution in the horizontal plane. These results will later be used to derive the motion of the intervertebral joint in the lateral and sagittal planes in both static and dynamic cases.
In this analysis, a facet joint will be considered to have an essentially rigid articulated surface. The facet joint will be considered capable of transmitting force without delay: its response to an axial rotation is not time-dependent.
The intervertebral disc, on the other hand, is composed of alternate layers of collagen fibres exhibiting viscoelastic properness4 making its response to an applied load strongly time- dependent. For example, when a moderate to large axial rotation is applied to L,, the transmission of forces due to annular fibres will not be instantaneous and the delay will be dependent upon the characteristics of the annular collagen fibres. More specifically, the angular displacement of b will depend upon the rate of loading of I+ in relation to L,.
The total static torque that an intervertebral joint can resist is noted as TjoaxS and may be considered to be distributed between the disc and the two facets as shown in Figure 3. TjOaxS in the static mode represents the sum of the static torques resisted at the annulus (T,,) and the facets (Tf,):
Tjoaxs = T,, + 2 Tfs (Nm) (1)
This equation also contains the implicit assumption that, when subjected to an axial torque, each facet joint will transmit the same amount of force and ener .
F This may not actually be the case, as only
one acet joint is under compression: that is, the
Facets
Figure 3 Distribution of torques in the static case
contact is considered to be hard and relatively time-independent. The other facet is pried open and its motion restrained by the capsular ligaments, which are viscoelastic structures and, therefore, time-dependent. However, the opening of a facet for a small applied axial tor ue has been
I shown to be negligible. We shall there ore proceed on the basis that the forces are instantaneously transmitted by the facets.
Available experimental datalo indicate that axial compression has a marked effect on the distribution of the axial torque between the annulus and facet (see Table I).
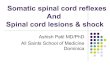
The tabulated results indicate that the total torque strength of the intact joint Tjoax, increases with compression. Conversely, isolated disc strength, denoted by Tgs, decreases with compression. The superscript, m, denotes that this particular value of the torque is the maximum measured when the angular deflection is maximum. The difference between Tgas and Tgs is the remaining facet torque contribution denoted by q. This variation is apparent when the data in Table 1 is plotted (Figure 4).
An exponential approximation can be made to fit the T& and 2 T data points. This has been done in order to extrapolate the past experimental data, while keeping in mind that the torque strength T !& can only decrease to zero. The relation between axial compression, CA, and maximum annular
Table 1 Torque strength of intervertebral joint components under varying axial compression (Pascals)
TYPO
Intact IV 84.2 61.0 23.2 joint, CA = 0
Intact IV 106.2 58.7 47.5 CA = 1.38 x 105
Intact IV 115.2 39.5 75.7 CA = 2.1 x 105
J. Biomed. Eng. 1987, Vol. 9, April 105

Spinal engine: S.A. Grawvetsky and S. Iacono
80
70
60
z
& 5o
2 P 40
&G
30
20
10
(I
/
Extrapolated region
b
I I I I I I 1.4 2.8 4.2 5.6 7.0 8.4
Compression (lOsPa )
Figure 4 Facet and disc static torque distribution graph. --- ,20:,- T&I Note: the curve in the extrapolated region is arbitrary and reflects our expectation that as compression increases, the torques supported by the annulus will continue to decrease. Similarly, the torque supported by the facets will increase as they are pressed together by the compressive forces
torque strength in the static mode can be expressed by the equation:
Trn ms = 60.0 exp(-4.2 x lo5 x CA) (Nm) (2)
The value of the maximum torque T ?& depends upon the corresponding amount of axial rotation. This relationship has been measured and may be approximated by a straight line (see Figure 5). Hence,
T,, = T& 9112 (Nm)
T MS = 50 exp(-4.2 x 10m5 x CA) (Nm) (3)
Equation 3 describes how to find the annular torque strength in the static case for a given axial compression and angular axial displacement.
Having found the equation for annular torque strength in the static case, the same procedure should be used for static facet torque strength T,. Unfortunately, there are no experimental results of facet torque versus angular displacement similar to those provided for the annulus in Fipre 5. Nevertheless, Tr, for a given axial compression and angular displacement can be evaluated from Table I by calculating Tans from equation 3 and then using equation 1 in the following form:
The dynamic case in the axial plane In the dynamic case, we must consider Tjoax at the intervertebral joint to be a function of the angular displacement and its rate of change because of the viscoelastic properties of the annulus.
We have derived a first-order differential equation relating these variables through the use of experimental data lo. The procedure is illustrated in Figure 6, with the equation having the following form:
600
h
S 500
-5 L 3
400 3 W E 300
200
100
0
Deflection (degrees)
Figure 5 Torque deflection curve for an isolated disc
o 2 ;4 6 0
0 “” (d/m) d/m: d.wee.,mlnute
A B
Figure 6 A is redrawn with permission from Farfan H.F. Mechanical Disorders of the Low Back. Lea and Febiger: Philadelphia, USA, 1973. For each value of the axial rotation angle 6 we measured the corresponding torque for a given rate of change do/&. This is shown in B. The equation fitting the data points is T(Nm) = A d&dt + Be, with A = 0.37, B = 1.72 and angle 8 in degrees. This particular series of experiments shows that for an axial rotation of 6 = 3.5’, the quasi-static torque strength of the joint is 6 Nm. This is not representative of the average response of the joint which, it is suggested, is 150 inches/lb or 20 Nm. To accommodate these claims, we resealed the parameters A and B to the values of A = 1.2 and B = 5.7. It is important to realize that no one knows how the joint is loaded in vivo. Hence, the Farfan experiments are necessarily arbitrary, and probably represent an unphysiological type of loading. Since we could not find any other source of data to substantiate these experiments, we decided to use the values of A = 1.2 and B = 5.7, bearing in mind that the calculation that would be made with them might be of qualitative value only, until other experimental evidence becomes available
106 J. Biomed. Eng. 1987, Vol. 9, April

Spinal engine: S.A. Gracovetshy and S. Iacono
rjoax =Admt+Be w-4 (5)
It is important to note that these experiments were conducted without any axial compression, CA, and therefore the values of A and B are valid only when CA = 0. In general, we would expect A and B to vary with CA. Keeping this in mind, we will proceed using the above-defined numerical value of A = 1.2. The sensitivity of rj,, to experimental errors in the determination of A shall be discussed later. We can derive B by noting that it is a function of 8 and deldt. By setting deldt to zero, we can calculate the value of B in the particular case of quasi-static torque loading. Equation 5 reduces to:
7Jk, = B k,, Pm) (6)
By re P
lacing Tj$_ = and max=
84.2 (with CA = 0 from Table 1) 12” (as found in the graph in Figure 5)
in equation 6, we obtain the results B = 5.7. Using Table 1, we can derive the values of Tj& where CA varies. Hence, the resulting function for B is
B = 5.7 + (9.8 x 10” x CA) (7)
Dynamic distribution of torque in the axial plane It should now be possible to decompose the distribution of total torque into annular and facet components in the dynamic case. This will permit the determination of the dynamic distribution of torque at the disc and facets during a walking or running cycle.
As presented and discussed earlier, the dynamic case is derived by assuming that the torque at the facets does not depend on deldt but solely on compression and axial displacement. Therefore, the dynamic torque transmitted by the facets is equal to the static torque transmitted by the facets when the angular displacement 8 and the compression CA are identical. This assumption also implies that the axis of rotation of the intervertebral joint will not move appreciably. If it does move from its assumed position at the posterior third of the disc to the posterior limit of the disc, the change in lever arm length from facet to axis of rotation is < 5%. In the absence of hard experimental evidence permitting a ruling on this controversial point, and given that the upper margin of this type of error is in the 5% range, we can neglect the motion of the axis of rotation. Hence,
2 Tf = 2 T, Pm) (8)
The total axial dynamic torque resisted at the intervertebral joint is the sum of the annular and facet torques as shown by equation 9.
I;oax = Z-, + 2 Tf Pm) (9)
The static case is represented by letting deldt = 0. We can relate equations I and 5 resulting in equation 10. By replacing equation 8 in equation IO,
B 8 = T,, + 2 Tfs (NW (IO)
That is,
Tfs = Tf = 0.5 (B 6 - T,,,) Pm) (11)
Equation 11 describes the torque at the facet in the dynamic case. Combining equations 5 and 9 and replacing 2 Tf with equation 11 results in equation 12, which describes the torque at the annulus in the dynamic case.
T, = A deldt + T,,, w-4 (12)
T,, can now be calculated at an intervertebral joint .c 1 the values of 8 and axial compression over the period of a walking cycle are known.
At this point in our calculations we know that, in order to rotate the joint, we must overcome its torsional strength characterized by rj,,. This will be achieved by generating a driving torque of proper magnitude and direction.
Such a torque may be resolved into two parts. The first is due to the effect of inertia of the body mass (counter-rotating pelvis and shoulders). The other is a direct result of the action of the muscles and the energy conversion process.
Since we can calculate Z& from equation 9, we need to know the torque caused by inertia (TC,) in order to determine the portion of the driving torque due to forces other than inertia (Td&.
The Cappozzo experiment The effect of inertia was analysed by Cappozzo44. First, he obtained anthropometric measurements on the position of the body above L.,. From these and kinematic data collected on volunteers, the moments of inertia assigned to different moving body segments, gravitational forces, inertial forces and couples were calculated. Using a free body diagram expressing all forces and couples in equilibrium, the intersegmental forces and couples in all three planes were calculated for several walking speeds. Figure 7 illustrates Cappozzo’s calculation for a walking speed of 2.16 m s-l. It must be noted, however, that these are the intersegmental torques acting at the I+ level walking. Cappozzo’s results do not show the
during
distribution of the resultant load among the various tissues involved. Knowing the difference of the values of Tjoax and the torques measured by Cappozzo will yield the remaining driving torque produced internally at the intervertebral joint when the axial compression increases. This is expressed by equation 13
TC, = lj,, - Tdax
where TC, denotes the axial torque calculated by Cappozzo. This equation is valid at the 4 level and permits us to determine the remaining driving torque required for a normal walking cycle in order to produce axial rotation at the L4 level. A
J. Biomed. Eng. 1987, Vol. 9, April 107

Spinal engine: S.A. Gracovetsky and S. Iacono
TME (%dciW TIME (% dvw TIME (%dww
Figure 7 Cappozzo intersegmental forces and couples L,. (Reproduced with permission from Cappozzo A. The forces and couples in the human trunk during level walking. J Biomech 1983, 16, 265-277. Copyright 1983 Pergamon Journals Ltd)
PELVIS
Plane
plane
Figure 8 Simulation of spine/shoulder/pelvis system
at Lq
similar equation can be derived for any other level.
Analysis of Cappozzo’s data As illustrated by the diagram in F&~re 8, the shoulders and the pelvis counter-rotate through an angle 8. Note the inclusion of a dorsal line on the spine/rod to emphasize the spinal torsion. One can imagine a plane situated between the shoulder and pelvis which separates the Scounter-rotating masses of the spinal engine. We call this the neutral plane. The point on the dorsal line intersecting the neutral plane has, by definition, no angular displacement. Therefore, no energy due to the action of the torque may flow through the neutral plane. If energy is to be transmitted through the neutral plane, it must be through some other mechanism.
The coupling of planar motions Once the total torque (Tj,& resisted by an intervertebral joint in the horizontal plane is known, we must find the driving torques required for the spinal mechanism in the lateral and sagittal planes. The method of formulation used in the horizontal plane cannot be readily applied because of the physical complexity involved in assessing the
torque effects on the annulus and facets in the lateral and sagittal planes. We suggest that it is possible to derive the lateral and sagittal driving torques from the torque calculated in the horizontal plane if equations characterizing the coupled motion of the spine can be formulated.
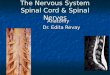
As stated earlier, a flexible rod bent in one plane induces an axial torque when bent in another plane. The spine, with its lordosis, induces a similar axial rotation when subjected to lateral bending. This effect, initially discovered by Lovet?, has been demonstrated by Pope on normal, fresh cadavers by performing flexion-extension and lateral bending movements4’. His results are reproduced in Figure 9~. Area 1 shows that no lateral bend and 10” of initial counterclockwise axial rotation results in the same counterclockwise rotation from L1 to 4, with some losses due to soft tissue absorption. Area 2 shows that, when a 20” right lateral bend is applied with an initial 20” counterclockwise axial rotation, the net axial rotation in the range 2-5” clockwise may be observed. Area 3 presents only a 20” right lateral bend producing a clockwise axial rotation, as shown.
F&we 9b illustrates the coupling of axial rotation with sagittal plane motion, e.g. a person bending forward (flexion) or straightening up (extension). The axial rotation and ventral translation curves show the axial-sagittal plane coupling. Note that the ventral translation curve, according to our reference axes, indicates increasing forward flexion with greater axial rotation. To better clarify this coupling mechanism, an interesting analogy using the coupling of gears is presented in Figure 10,
8
6
4
-4
-6
-8
-10
f
-
r 1-5 L4 L3 13 Ll Tl2 TU T10
Figure 9a Coupling of lateral bend to axial rotation
108 J. Biomed. Eng. 1987, Vol. 9, April

Spinal engine S.A. Gracovetsky and S. Iawnn
true within 5%. This is quite remarkable as it represents a very peculiar expression of the first law of thermodynamics. It should also be noted that high energy efficiency in biological systems is not uncommons6. In the absence of any evidence to the contrary, we shall assume that this property holds true for the other torques as well. Since the amount of energy expended by a torque is the product of torque and angular displacement integrated over the time interval (0, T), we have the following relations:
T
TORQUE(Nm)
_ll/_t_t_15 (degrees) 0 5 10
0 -1 -2 -3 oxllfmetm)
Figure 9b Coupling of sagittal bend to axial rotation. (Both parts of Figure 9 are reproduced with permission from Pope, M., Wilder, R., Matter, R. and Frymoyer, J. Experimental measurement of vertebral motions under load. Orthop Clin N Am 1977, 8, 155-167)
where a left lateral bend produces an axial torque forcing a clockwise rotation of the pelvis (as viewed from above). Pope’s results should be compared with the experiments performed by Pearcy on live volunteerss5 and by Panjabi on individual joints43.
ENERGY TRANSFERS
This coupled motion of the spine relates the torques in the horizontal, sagittal and lateral planes. As explained earlier, whenever the spine flexes and extends the trunk in the field of gravity, the energy liberated by the hip extensors is first transferred in the gravitational field in potential form (airborne phase) and then converted from potential to kinetic form at heel-strike. This energy is then used to force the spine to bend laterally, which, in turn, induces the axial rotation required to rotate the pelvis during walking. Indeed, it appears that the human body tries to minimize energy losses. In an earlier observation’, the couples calculated by Cappozzo, combined with the displacements measured by Thurston, indicated that an approximately equal amount of energy is transferred sequentially in each plane as the spine moves. This was expressed mathematically by the following relation:
E ax = hat = Es, (Joules) (14)
in which the * symbol means that the identity is
E,= d Tdax (t) e(t) T
Elat = Tdlat (t) x(t)
E sag = d Tdsag tt) a(t)
Tdax can be calculated
(Joules) (15)
(Joules) (IS)
(Joules) (17)
from equation 13. The angular displacements 8, Z and a are known from the literature5’ and are discussed in the next section of this paper. Hence, E, can be derived from equation 15. Using equations 14, 16 and 17, we can calculate the remaining torques Tdlat and &sag.
ANGULAR DISPLACEMENT AND AXIAL COMPRESSION DATA
The system of equations 1 to 17 is now complete. Data, in terms of axial, lateral and sagittal angular displacements, and axial compression, must be found in order to calculate the various torques and energies. Since we found no published data from any one single source describing the angular displacement and the inertial forces at all spinal levels, we propose to combine Cappozzo’s data44, as well as that of Thurston and Harris5’ and Winter1,27’28. All these data sets were collected from different individuals of similar size, walking at similar horizontal velocities.
For these reasons, the resulting calculation may be of qualitative value only. The described phenomenon, however, is inherently related to the human species and, as such, there are fewer
Figure 10 The coupled motion of the spine
J. Biomed. Eng. 1987, Vol. 9, April 109

Spinal engine: S.A. Gracovetsky and S. Iacono
6
4
2
0
-2
4
-6
-a
-10
42
The bee )
0C*-
LHS RHS LHS
RTO LIU
Figure 11 Angular displacement data for walking at V= 2.16 m&t. It is important to note that the axial angular displacement represents the motion of markers mounted on an apparatus which is placed above the T,, and S, level. Hence, it does not portray the true angular displacement of the T,,/S, segment of the spine. The word ‘shoulder’ used in the text in conjunction with the Thurston experiments must be understood to be the apparatus placed at the T,, level. For this reason, the motion of the thoracic spine need not be discussed. Displacements: -, axial - - -, lateral; - - -, sagittal (Reproduced with permission from Thurston, A.J. and Harris, J.D. Normal kinematics of the lumbar spine and pelvis. Spine 1983, 8, 199-205.)
variations between individuals than may appear at first glance. A high energy transfer may characterize a healthy individual and thus, be independent of anthropomorphic variations. The database used for pelvic angular displacement is shown in Figure II. (Note: curves have been smoothed for purposes of this paper.) The average velocity of the volunteer was q 2 ms-i. During the normal walking cycle, the toe-offs (ie. LTO and RTO) occur at approximately 10% and 60% of the cycle respectively. Heel-strikes (LHS and RHS) occur at 50% and 100% of the cycle.
By combining the force resulting from the weight of gravity at the I+ level along the Z-axis, as shown in Figure 7, with the force due to the sagittal torque as noted by Cappozzo44, the axial corn
P ression,
CA, may be identified as the resultant orce along the Z-axis over an average annulus area of 4 cm2. The graph in Figure 12 represents the CA data curve over the period of a walking cycle for I/ = 2.16 ms-i. Because of the peculiar arrangement used by Thurston to position his markers, the
angular displacement shown in Figure 1 I must be doubled. Furthermore, we assume the total angular displacement of the T,,/S, segment to be evenly distributed through all five intervertebral joints. For our purposes, the angular displacements use for our b level is one-fifth of the total relative angular displacement, or two-fifths of the data in Figure I I. The slope at each point was computed by a difference method in order to calculate the derivative deldt.
DISTRIBUTION OF THE ANNULUS AND FACET TORQUES
Figure 13 represents the distribution of torques T, and Tf in the horizontal plane. As expected, Tf = 0 wherever 8 = 0. Since the facets of an intervertebral joint are not engaged when the axial angular
0.8
0.6
0.4
0.2
.C”
4 04 .5 1.0
Time (set )
Figure 12 Axial compression (CA) data. Note: the data represents the resultant compressive force through the horizontal plane at the L4 level. The contribution of internal muscles to balance the body is not considered. Depending upon the posture, this added muscular contribution could represent an added compressive force ranging from zero to twice the body weight. As we have no data on the subject’s posture, we have not included it. Furthermore, later sensitivity analyses showed that this factor will not change any of the proposed conclusions
40
30
20
10
0
z -10
z. % -20
P c”
-Jo
-40
Figure 13 Distribution of annulus and facet torque. Note the difference in phase between the annulus and facets. This is due to the viscoelastic nature of the annulus fibrosus
110 J. Biomed. Eng. 1987, Vol. 9, April

displacement returns to zero, r, and Tf are almost in phase, with Tf lagging slightly behind T,. The peak torque for Tf occurs at the toe-offs because the angular displacement is maximum.
The peak torque for T, occurs at heel-strike because the viscoelastic structure of the annulus also causes the response to be dependent upon the rate of angular displacement. This maximum torque results from the combination of a still large but decreasing deldt (before it reaches zero at toe- off, when the pelvic motion reverses) with an increasing, but not yet maximum, 8. Thus, the distribution of torques between the annulus and facets serves to transmit the necessary torque to drive the pelvis throughout the walking cycle by alternately loading the facets and the annulus. The direction of the torques, according to the reference axes used, is as expected. For example, at LHS, the pelvis is rotating to the right about the Z-axis in accordance with the reference axes in Figure 2. T, and Tf oppose this motion and are, therefore, negative. The torques T, and Tf are dependent upon the axial compression, CA. This effect is important because CA is maximum just after heel- strike and therefore contributes si~nificantlv to the increase in torque strength of the goint at a time when it is needed most.
This suggests that the spine must be impulse loaded. Therefore, one should not attempt to use shoes to dampen all shocks on the spine. Indeed, compensating mechanism seems to exist which opposes any attempt to change the foot/ground forces from some optimal vahn?. The fact that runners often prefer the surface quality of some tracks more than others may be explained by the
a
maximum energy recovery attained by the perfect matching of the shape of the impulse received by the spine at heel-strike with the viscoelastic properties of the annulus fibrosus. That is to say, the kinetic energy liberated by the falling body of the runner is recovered for pelvic rotation. This view is also consistent with the observation that running on soft sand is very tiring. In that case, the loss of energy at heel-strike forces the abdominals to rotate the pelvis - a very tiring method of pelvic rotation.
INJURY
This analysis also suggests that, when a subject trips during the walking cycle, the type of torsional injury that may occur will depend upon the timing of the trip in the cycle in relation to the axial compression pulse. If tripping occurs at heel-strike, combinations between CA, T, and Tf will be inconsonant, thereby putting the annulus at greater risk than the facets. At toe-off, the converse occurs. We therefore predict that an acute torsional injury is not necessarily the result of a simultaneous rupture of the annulus and the facet joints. It is theoretically possible to have a facet-predominant injury in which the annulus remains substantially intact when a subject trips at toe-off. This may help to explain the so-called ‘facet syndrome’. Similarly,
Spinal engine: S.A. Gracovetsky and S. Iacono
it may be argued that an acute injury due to annulus-predominant damage is also theoretically possible.
Such theoretical findings do not contradict the pathological observations of Farfanlo, since the acute loss of facet strength is expected to be followed by annular damage as the injury is repeated and progresses over time. However, pathology reflects integrated injuries, and is therefore a poor indicator of the acute injury that may have initiated the degenerative process. Thus, although available evidence leads us to challenge the view that an acute torsional injury is always one initially involving both annulus and facets, more experimental data must be collected before a general rule may be adopted.
DISTRIBUTION OF TORQUES
Figure I4 presents the distribution of torques Tdax, Tdlat and Tdsag.
Tjoax, One should note that Tjoax
(calculated in equation 9), which represents the torque resisted by the intervertebral joint throughout a walking cycle in the horizontal plane, is exactly 180’ out of phase with Tdax, although its magnitude is slightly greater than that of Tdax. The torque Tdax is in phase with the axial torque TC, obtained from Figure 7. This indicates that Tdax acts upon the intervertebral joint at the L level, in concert with TC,, to turn the joint to the right starting at one-third of the left swing phase to one- third of the right, and vice-versa.
Unexpectedly, the torque required to turn the joint to the left does not begin at RTO but some time after, and likewise when turning to the right for LTO. Why is this?
Note that Tdlat causes the intervertebral joint to bend laterally about the X-axis. As seen in Figure 14, Tdlat bends the spine to the right before the right swing phase, thereby ‘cranking’ the spine
300
200
0 10 50 60 100
Figure 14
LH!3 RR3 RHS LTO LHS
Distribution of driving torques due to axial compresston. Torques: - - -, T,,,; -, Tdu; -, Tdus; --- 7 T&t
J. Biomed. Eng. 1987, Vol. 9, April 111

Spinal engine: S.A. Gracovetsky and S. Iacono
to the right before RTO and providing energy in the lateral motion, similar to a bent spring. A short time later, from LTO until RHS, 7&t acts laterally to bend the joint to the left about the X-axis, thus repeating the cycle for the left swing phase. One should also note that the instant of time at which the energy from the lateral bend begins to contribute to the axial rotation during the swing phase occurs before T,-J= begins to rotate the joint to the right or left after LTO or RTO, respectively.
POWER TRANSFER
The actual power needed to produce the required torques in all three planes of motion has been calculated and is shown on the graph in Figure 15.
As expected from the equal energy transfer equations 15, 16, and 17, the power requirement is exactly the same in all three planes. At toe-off, the power transfer bursts are negative, indicating an absorption of power at toe-off.
DISCUSSION
The differential equation 5 has been derived for a single intervertebral joint tested in in vitro. Other structures, such as the lumbodorsal fascia, were not included; they must contribute to the torque available to the pelvis. At this time, we do not know how to directly evaluate their contribution. One can obtain an estimate by considering the results of Winter’s measurement of the average hip power during normal walking’. Although the magnitude of the power at the hips is different from that calculated at the L level, their patterns should nevertheless yield some correlation. The superimposition of power patterns shown in Figure 16 indicates that there are some striking similarities.
The power measured by Winter peaks after our calculated power variation at the I+ level. This suggest the legs follow the pelvic motion and not the reverse as commonly believed. According to our calculation, the magnitude of the power measured by Winter1*i8 is about ten times that of our single joint model. When the total rotation of the five lumbar joints is considered, the ratio
3
2
LHS RTO BHS LTO LHS
Figure 15 Power transfer at L, for one intervertebral joint
LHS RHS LHS
RIO L-l-0
Figure 16 Superposition of Winter and I+ power curves. Note the scale differences between the two torques due to the small displacement of the intervertebral joint
changes from 10 to 2. This is very close but does not provide definitive proof that the spinal engine indeed drives the pelvis.
There are a number of implications in this observation:
1. We view the spine itself as a controller of forces which are essentially flowing through the large lumbodorsal fascia. This representation is a generalization of our previous studies of weight lifting in the sagittal plane42>43g53*s4. We suggest that this view appears to be consistent with the concept of evolution. In our opinion, the spine has evolved from being the primary source of power to that of controller of the power delivered by the hip extensors’ ps4.
2. This theoretical analysis relies on the validity of differential equation 5, which has been derived from experiments conducted under artificial conditions. As pointed out earlier, coefficients A and B reflect this fact. Proper experiments will have to be carried out in order to analyse the response of the intervertebral joint under more physiological conditions. For example, a joint could be subjected simultaneously to dynamic lateral bending and compression in order to simulate the type of in viva loading during normal walking, and the corresponding induced axial torque measured.
3. Although the power delivered by one intervertebral joint is relatively small, one must bear in mind that this is due to the small angular displacement of the pelvis and not to a small magnitude for the driving torque.
SENSITIVITY ANALYSIS
In order to appreciate the validity of the assumptions made in reference to equation 5, we carried out a sensitivity analysis consisting of perturbing a given parameter in an equation and calculating the resulting effect on the torques. Its purpose was to understand the dependency of the calculated driving torques on various input parameters which were varied by more than 50% of their stated value. A number of observations were made.
112 J. Biomed. Eng. 1987, Vol. 9, April

The torque T& %
was expected to have a higher peak than Tdat ecause the pelvic rotation in the sagittal plane was minimal when compared to its rotation in the lateral plane. In this case, changing the input angular displacement magnitudes resulted in small variations in torque magnitude. In Figure I I, the sagittal torque precedes the lateral torque which, in turn, precedes the axial angular displacement in the walking cycle. This may be better understood by the fact that walking requires a transfer of energy from sagittal to lateral to horizontal planes. What would happen if these angular displacements were exactly in phase? Figure I 7 shows that the resultant torque directions do not correspond to those required for normal walking. The importance of timing can be appreciated from a different perspective. Should the floor level be lower than expected, the heel strike will occur later than it should. In that case, the pelvis would begin to slow down or reverse its axial angular motion. When the delayed heel-strike finally occurs, the driving torque will be out of phase with the axial angular displacement. The resulting impact may damage the facets as they must support most of the torque to be transmitted. Such a situation is similar to pushing a child on a swing at the wrong time.
When A was varied from 0.2 to 1.7, the magnitude of all torques except Tf increased slightly. More importantly, the phases and orientation of the torques were not changed at all. Tf was not affected because our formulation precluded any time- dependent effects upon the facet torque.
CONCLUSION
We have calculated the ener transfers through the spine on the basis of pe Y ect energy conservation using semi-experimentally determined equations. The power transferred to the pelvis from the spine is qualitatively similar to the power available at the hip joint, as derived by others from analyses limited strictly to the motion of the legs.
The calculated timing of the various phases of walking suggests that the spinal motion precedes
300 -t
200 -I
Figure 17
limebee) 16
i 10 50 60 100
LHS F?To RHS LX-0 LHS
Torques with in-phase angular displacements: - - -, q,,; -, T&x; - -1 T&g; - - - -, T&t
Spinal engine: S.A. Gracovetsky and S.. Iawna
the leg motion slightly. We submit this result as further circumstantial evidence to support our working hypothesis that the spine is the primary engine for locomotion, with the legs following the pelvic motion.
The spinal engine theory clarifies the mechanism of torsional injury. Acute torsional injuries can involve either the two facets, the annulus, or both, but not necessarily all of the components of the intervertebral joint at once.
ACKNOWLEDGEMENTS
This work was supported by the National Science and Engineering Research Council of Canada.
REFERENCES
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
17
18
19
20
Winter, D.A. Biomechanical motor patterns in normal walking. J. Motor Behavior 1983, 15, 302-330 Inman, V.T. Human locomotion. J. Can. Med. Assn. 1966, 94, 1047-1057 Ralston, H.J., Herman, R., Grillner, S., Stein, R.B. and Stuart, D.G. Energetics of human walking. In: Neural Control ofLocomotion. Plenum Press, New York, 1976, 822 Williams, K.K., Cavanagh, P. A model for the calculation of mechanical power during distance running. J. Biomech 1983, 16, 115-128 Arshavsky, Y.I., K. Orlovsky, M., Rodianou, G.N. and Shik, M. Investigation of the biomechanics of running by the dog. Biophysics 196.5, 10, 737-746 Gracovetsky, S. The resonating spine. Proceedings of thx I984 IASTED Confe7ence on Modelling and Simulation, New Orleans, 1984 Gracovetsky, S. An hypothesis for the role of the spine in human locomotion: a challenge to current thinking. J. Biomed. Eng., 1985, 7, 205-216 Lovett, A.W. A contribution to the study of the mechanics of the spine. Am. J. Anat. 1903, 2, 457-462 Adams, M.A., Hutton, W.C. Prolapsed intervertebral disk: a hyperflexion injury. Spine, 1982, 7, 184-191 Far-fan, H.F. Mechanical Disorders of the Low Back Lea and Febiger, Philadelphia, 1973 Farfan, H.F., Kirkaldy-Willis, W.H. The present status of spinal fusion in the treatment of lumbar intervertebral joint disorders. Clin. Orthop. 1981, 158, 198 Farfan, H.F. Effects of torsion on the intervertebral joints. Can. J. Surg. 1969, 12, 339 Farfan, H.F. The use of a mechanical etiology to determine the efficacy of active intervention in single joint lumbar intervertebral joint problems: surgery and chemonucleolysis compared: a prospective study. Spine 1985, IO, 350-358 Farfan, H.F. Mechanical Factors in the Genesis of Lou Back Pain. 2nd ed. Raven Press, New York, 1979, 635 Virgin, W.J. Experimental investigations into the physical properties of the intervertebral disc. J Bone Jt. Surg. 1951, 33-B, 607-61 I Shirazi-Adl, S.A., Shrivastavi, S.C., Ahmed, A. Stress analysis of the lumbar disk-body unit in compression: S-dimensional non-linear finite element study. Spine, 1984, 9, 12&133 National Institute for Occupational Safety and Health. Work practice guide for manual lifting. DHHS (NIOSH) Publication No. 81-122. Cincinnati, OH, USA, 1981 Cavagna, G., Komarekko, L., Mazzolen, S. The mechanics of sprint running. J. Phys. 1971,217, 709-721 Perez, 0. Fracture of the vertebral end plate in the lumbar spine. Acta. Orthop. Stand. 1957, 25 Suppl, l-101 Gracovetsky, S., Farfan, H.F., Lamy, C. The mechanism of the lumbar spine. Spine, 1981, 6, 249-262
J. Biomed. Eng. 1987, Vol. 9, Apd 113

Spinal engine: S.A. Gracovetsky and S. Iacono
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
Farfan, H.F., Cossette, J., Robertson, G., Wells, R. and Krauss, H. The effects of torsion on the intervertebral joint: the role of torsion in the production of disc degenerati0n.J. Bone Jt. Sung., 1970, 52A, 468 Gracovetsky, S. The determination of safe load. Brit. J. Indus. Med 1986, 7, 120-134 Farfan, H.F., Gracovetsky, S. The nature of instability. Spine, 1984, 9, 714-719 Weaver, K. The search for our ancestors. National Geographic, 1985, 168, 560-623 Cavagna, G.A. Aspects of Eificiency and Ineihciency of Ter- restrial Locomotion. In: Biomecbatis VI-A (E. Asmussen ed.) University Park Press, Baltimore, USA, 1978, 3-22 Pierrynowski, M., Winter, D., Norman, R. Transfers of mechanical energy within the total body and mechanical efficiency during treadmill walking. Ergonomics, 1980, 23, 147-156 Winter, D. Kinematic patterns in human gait: variability and compensating effects. Hum. Mwem. Sci. 1984, 3, 51-67 Winter, D. Moment of force and mechanical power in j0gging.J Biomech 1983, 16, 91-97 MacMahon, T.A. Neural control of locomotion. In: Muscle, Rejbzxes and Locomotion. Princeton University Press, Princeton, NJ, USA, 1984, 169-233 Frank, A. An approach to the dynamic analysis and ;r5t;;k of biped locomotion machine. J. Biomech 1970, 8,
Henami, H., Weimer, F., Koozekanani, H. Some aspects of the inverted pendulum problem for modelling locomotion systems. IEEE Trans. Automatic Controls, 1973, AC-18, 658-661 Siegler, S., Seliktar, R., Hyman, W. Simulation of human gait with the aid of a simple mechanical model. J Biomech, 1982, 15, 41.5-425 Schultz, A.B., Anderson, G.B.J., Haderspeck, K., Ortengren, R. and Bjork, R. Analysis and measurement of lumbar trunk loads in tasks involving bends and twists. J Biomech 1982, 15, 669-675 Bartelink, D.L. The role of the abdominal pressure in relieving the pressure on the lumbar intervertebral disc. J Bone Jt. Surg., 1957, 39-B, 718-725 Schultz, A.B. Biomechanics of the spine. In: Symposium on Low Back Pain and Industrial and Social Disablement London, Back Pain Association, 1982, 19-24 King, A.I. A review of biomechanical models. J Biomed Eng. 1984, 106, 978-1003 Bogduk, N., Macintosh, J. The applied anatomy of the thoracolumbar fascia. Spine, 1984, 9, 164-170 Macintosh, J., Bogduk, N. The anatomy and function of the lumbar back muscles and their fascia. Private communication. Gracovetsky, S., Farfan, H.F., Helleur, C. The abdominal mechanism. Spine, 1985, 10, 317-324
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
Gracovetsky, S., Farfan, H.F. The optimum spine. Spine. 1986, 11 Gracovetsky, S. Function of the spine. J Biomed Eng. 1986, 8, 217-223 Pope, M., Wilder, R., Matter, R. and Frymoyer, J. Experimental measurement of vertebral motions under load. Orth@. Clin N. Am 1977, 8, 155-167 Panjabi, M., Krag, M., White, A. and Wayne, 0. Effect of preload on load displacements curves of the lumbar spine. Orthop. Clin. N. Am 1978, 8, 181-192 Cappozzo, A. The forces and couples in the human trunk during level waIking.J. Biomech 1983, 16, 265-277 Krauss, H., Farfan, H.F. and Jones, T. Stress analysis of the human intervertebral disc. Rot. 25th Ann. Co@ Eng. Med. BioL 1972, 242 Spilker, R.L., Daugirda, D.M., Schultz, A. Mechanical response of a simple finite element model of the intervertebral disc under complex loading. J Biomech 1984, 17, 103-112 Shirazi-Adl, S.A., Shrivastavi, SC., Ahmed, A. Stress analysis of a lumbar motion segment in axial torque alone and combined with compression. Abstracts I985 Mtg. Inter. Sot. Stud. Lum. Spine. Sydney, Australia, 1985 Hickey, S.D., H&ins, D., David, W.L. Relation between the structure of the annulus fibrosus and the function and failure of the intervertebral disc. Spine 1980, 5, 106-l 16 Schultz, A.B., Anderson, G., Ortengren, R., Haderspeck, K. and Nachemson, A. Loads on the lumbar spine: validation of a biomechanical analysis by measurement of intradiscal pressures and myoelectric signals. J. Bone. Jt. Surg. 1982, 64A, 713-720 Himmelblau, D. Applied non-linear programming. McGraw-Hill, New York, 1972 Wolff, J. Das Gesetzder Transformation der Knochen. Hirschwald, Berlin, 1892 Cowin, S.C. The mechanical and stress adaptive properties of bone. Ann. Biomed. Eng. 1984, 11, 263-295 Patriarco, A., Mann, R., Simon, S. and Mansour, J.M. An evaluation of the approaches of optimization models in the prediction of muscle forces during human gait. J. Biomech 1981, 14, 513-525 Kazarian, L.E. Creep characteristics of the human spinal column. Orthop. Clin. N. Am. 1975, 6, 3-18 Pearcy, M.J. Stereo-radiography of lumbar spinal motion. Acta. Or&p. Stand 1985, 212 Suppl, 56 Scholander, P.F. The wonderful net. In: Animal Engineering. Scientific American, New York. 1974, 17-22 Thurston, A.J., Harris, J.D. Normal kinematics of the lumbar spine and pelvis. Spine. 1983, 8, 199-205 Snel, J.G., Delleman, N.J., Heerkens, Y.F., van Ingen Schenau, G.J. Shock-absorbing characteristics of running shoes during actual runnings. Proc. 9th IntL Cong. Biomech Waterloo, Canada, 1983, 5B, 133-138
114 J. Biomed. Eng. 1987, Vol. 9, April