Embed Size (px)
Citation preview

ENGR 491-509: AggiE Challenge—Multi-Disciplinary Project on Ground & Marine Robotics to facilitate Rapid Arms Control Verification
Instructors: Dr. Robin Murphy, Dr. Craig Marianno, and Dr. Dylan Shell Teaching Assistant: Grant A. Wilde
Executive Summary We have completed the newly developed two-semester project-oriented course exploring the operational concept (CONOPS) of using robots for nuclear verification scenarios. The course brought together undergraduate students in Electrical Engineering, Computer Engineering, Nuclear Engineering, and Computer Science. Instruction took the form of lectures, laboratory exercises and tutorials, a visit by industry experts, hands-on field-exercises and observation of robotic field deployments. The students were involved in initial hardware and software prototyping and development; assessment of the students has combined both individual and team-based aspects. Currently, all eleven students have expressed a wish to continue to the second semester of the course. The course proceeded along three lines, at most two interleaved and running concurrently: the teaching of fundamentals, and robotic & nuclear verification specific experiences, and project development. We provide some detail of these next. Project scoping and development: The motivation for the challenge arose from the US State Department's interest in robotics for verification in arms control settings. The students were provided with a report entitled “An Investigation into the Applicability of Modern Robotics to Nuclear Arms Control Verification ,” a report compiled for the US Department of state, which details the motivation and rationalé for the exploring robotic nuclear verification scenario. The students produced summary reports and performed an interactive analysis of the space of opportunities and technical feasibility under the guidance of an instructor. This helped identify the problem littoral and shallow water mapping (in the small-scale) as a feasible model problem. The students thus began scoping the minimum capabilities for this inspection problem, ultimately developing a basic air-boat platform with which they could experiment and gain a sense of what was a feasible. Fundamentals-oriented pedagogy: The students are drawn from range of a engineering majors and experience-levels. It was therefore necessary to bring each of them up to some basic level of theoretical and practical understanding across a variety of the topics. The core elements that comprise this aspect of the course were Radiation and Elementary Nuclear Physics, Nuclear Source Safety, Human-Centered Design and Prototyping Methodologies, AI/Robotics, Programming in Python, Code Debugging and Documentation, Pulse Width Modulation and Servo Control, Simple Electronics and Breadboarding, Basics of Estimation, Mathematics for Interpolation and Extrapolation Procedures. The precise form that these discussions took varied depending on the material and instructor, including online videos (via udemy.com), lectures with power-point, black-board lectures, and live program development. Robotic and nuclear verification specific experiences: The class participated in several exercises in order to gain hands-on experience in aspects related to robotics and nuclear radiation. These aspects were designed to complement lectures and traditional
book-learning aspects of the course. Examples include: evaluation and experimentation with a range of nuclear measurement devices (ranging from $200 - $100,000 devices), a nuclear source “hide-and-seek” search exercise, a team-based nuclear source mapping assignment in the Zachary building, participation in a radiological field-exercise and in situ observation of field deployments of robots for simulated disasters hosted at the TEEX Disaster City Facility. The students also had opportunities to interact with experts from Sandia National Laboratories, researchers with a unique focus of expertise in both robotics and radiation. The students worked in groups which were assigned in order to ensure that each team had a mix of capabilities and backgrounds. Initially, the students built familiarity by work on as Raspberry Pi mini-computer device, programming assignments on their own in python, controlling physical devices (LEDs and servo motors). Next, each group was equipped with a AquaCraft Alligator Tours RC-model Airboat which they then retrofitted: A separate board for speed control of a DC motor was developed (in different forms: some groups used breadboards, some protoboards) and mounted, waterproofed, etc. Some groups paid greater attention to the power system than others (the boat's motor and servo operates at a different voltage from the Raspberry Pi); two of the groups added extra buoyancy, and at least one spent considerable time on the network communications. Prototyping was undertaken in a laboratory setting in the Undergraduate Robotics Teaching Lab in HRBB and the Engineering Innovation Center. The final evaluation of the airboat platform varied from group to group, including evaluation out-doors and in the Recreational Center Swimming pool. Apart from the air-boat prototype, a second deliverable was delivered by the students: each group conducted a radiation measurement and mapping exercise. This involved physically recording measurements and their locations, establishing and documenting a precise procedure to achieve this, then implementing their own algorithm in order to interpolate beyond the measurements themselves. Some groups implemented this in MATLAB, others in Python. The second semester involved a concerted effort by students working in cross-cutting teams in scaling up their previous efforts and integrating their components. This included hardening code for planning trajectories using a novel spiral path, and registering data to online maps, filtering and smoothing data with an inverse weighting interpolation algorithm. Students worked both in simulation and on a single larger airboat, a Lutra 1.1 named the Aggie Challenge, and a final exercise at Disaster City® brought all the pieces together. Students displaying their airboat prototype (four teams of three, each produced a robot).
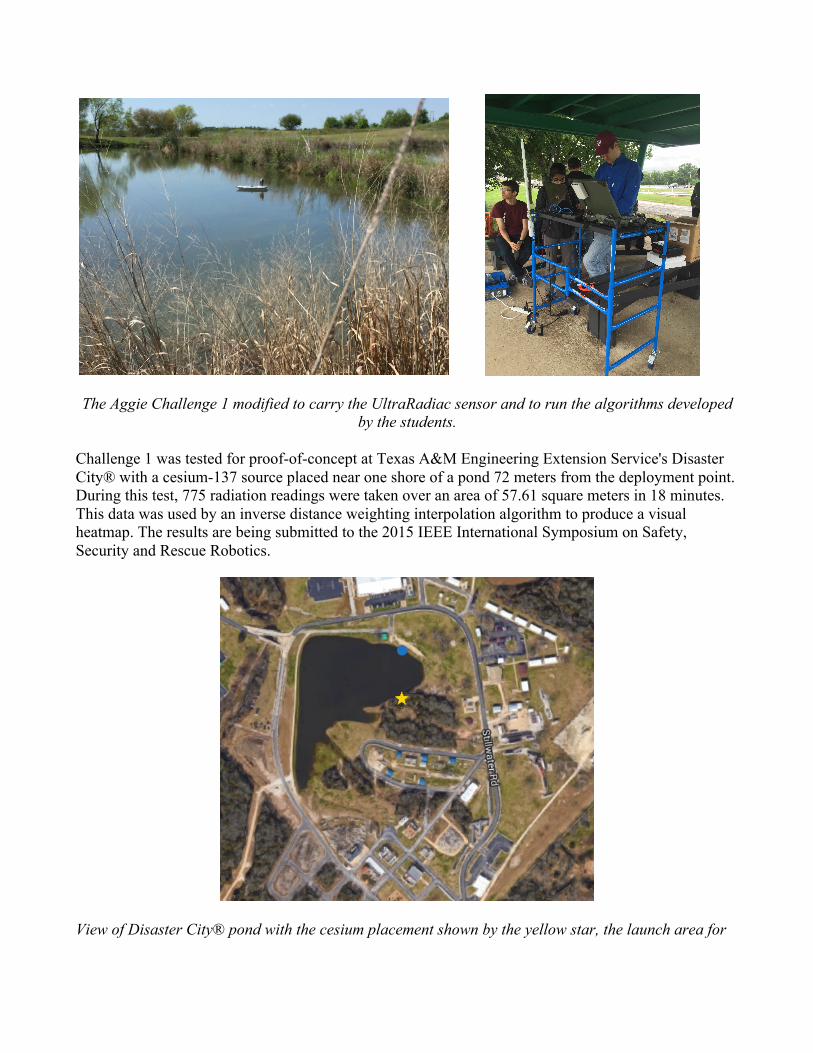
The Aggie Challenge 1 modified to carry the UltraRadiac sensor and to run the algorithms developed by the students.
Challenge 1 was tested for proof-of-concept at Texas A&M Engineering Extension Service's Disaster City® with a cesium-137 source placed near one shore of a pond 72 meters from the deployment point. During this test, 775 radiation readings were taken over an area of 57.61 square meters in 18 minutes. This data was used by an inverse distance weighting interpolation algorithm to produce a visual heatmap. The results are being submitted to the 2015 IEEE International Symposium on Safety, Security and Rescue Robotics.
View of Disaster City® pond with the cesium placement shown by the yellow star, the launch area for
the Challenge 1 in blue, and the operator work area in green.
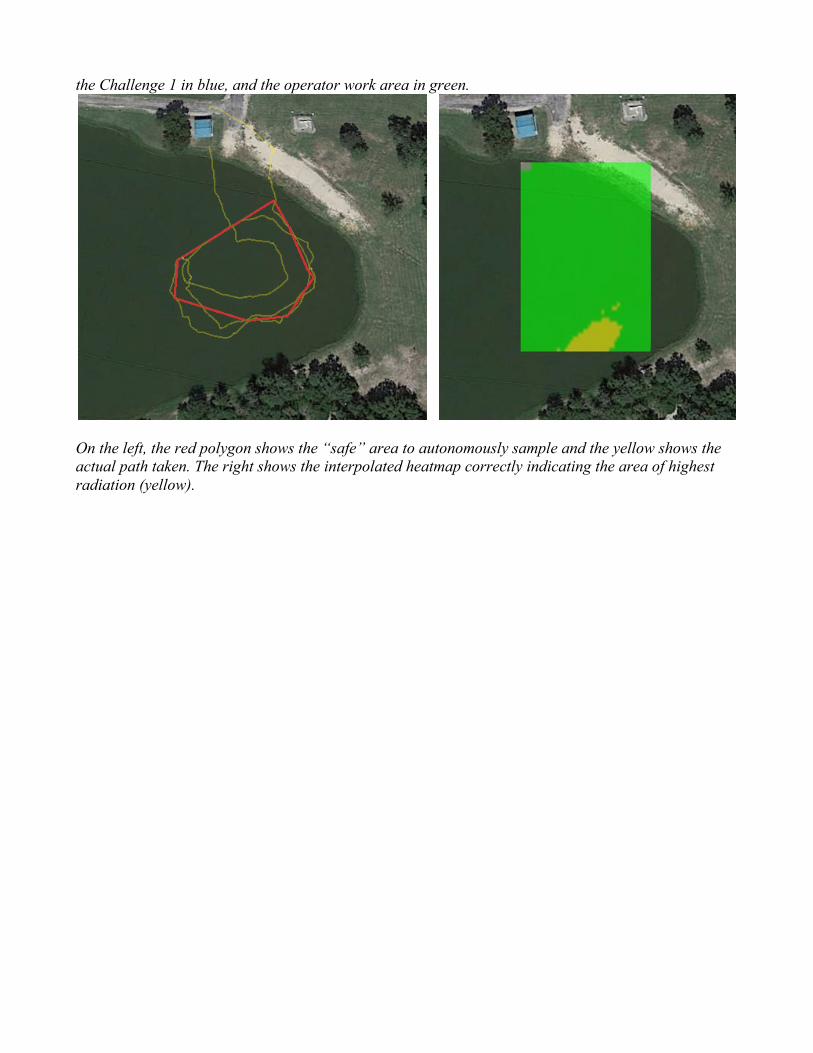
On the left, the red polygon shows the “safe” area to autonomously sample and the yellow shows the actual path taken. The right shows the interpolated heatmap correctly indicating the area of highest radiation (yellow).





























