Embed Size (px)
Citation preview

CLASSE 3 ELETTRICO
ESERCITAZIONI
DI
PLC
Anno Formativo 2014/2015

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 1 -
Generalità
Il software che utilizziamo per le esercitazioni in classe è una versione demo liberamente scaricabile
dal seguente link:
https://emiliogiomocfpfonte.wordpress.com/link/
Per l’installazione seguire le istruzioni.

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 2 -
ESERCITAZIONE 1
Comando di motore asincrono a doppio senso di marcia.
Si deve comandare un motore asincrono ad avviamento diretto con doppio senso di marcia (avanti e
indietro). Il comando nei due sensi deve avvenire con pulsanti dedicati, mentre l’arresto è ordinato
con il pulsante di STOP oppure con il pulsante di EMERGENZA.
Devono essere previste le seguenti segnalazioni:
• motore AVANTI
• motore INDIETRO
• motore GUASTO
• motore FERMO
Realizzare il programma utilizzando la funzione memoria sia con la classica autoritenuta sia con i
dispositivi Set/Reset.
Determinare il numero di ingressi e di uscite e realizzare la tabella associativa.
Esempio fronte quadro di comando e controllo
AVANTI STOP EMERGENZA
MOTORE AVANTI
MOTORE INDIETRO
INDIETRO
MOTORE GUASTO
MOTORE FERMO

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 3 -
ESERCITAZIONE 2
Comando di motore asincrono trifase con avviamento diretto a due mani e consenso di
posizione.
Il nastro trasportatore viene comandato da un sistema a due mani (due pulsanti distanziati tali da
rendere possibile il loro azionamento con due mani) e dal consenso del finecorsa in funzione della
posizione del pallet.
L’arresto deve avvenire premendo il pulsante di STOP o agendo sul pulsante di EMERGENZA.
Realizzare il programma utilizzando la funzione memoria sia con la classica autoritenuta sia con i
dispositivi Set/Reset.
Determinare il numero di ingressi e di uscite e realizzare la tabella associativa.
Ftc1 Ftc2
Verso dello spostamento
M1
START STOP EMERGENZA
MOTORE
AVANTI
MOTORE
INDIETRO
MOTORE
FERMO
START

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 4 -
ESERCITAZIONE 3
Comando di motore asincrono trifase con avviamento diretto a due mani e consenso di
posizione con ritorno automatico.
Il nastro trasportatore viene comandato da un sistema a due mani (due pulsanti distanziati tali da
rendere possibile il loro azionamento con due mani) e dal consenso del finecorsa Ftc1 che rileva la
posizione del pallet all’inizio del nastro trasportatore.
Quando il pallet raggiunge la posizione 2, individuata dell’azionamento del finecorsa Ftc2, si arresta la
marcia in avanti del nastro, si inserisce una attesa di 15 secondi, scaduti i quali si aziona
automaticamente l’inversione di marcia che riporta il pallet nella posizione di partenza.
L’arresto deve avvenire premendo il pulsante di STOP o agendo sul pulsante di EMERGENZA.
Realizzare il programma utilizzando la funzione memoria con i dispositivi Set/Reset.
Determinare il numero di ingressi e di uscite e realizzare la tabella associativa.
Ftc1 Ftc2
Verso dello spostamento
M1
START STOP EMERGENZA
MOTORE
AVANTI
MOTORE
INDIETRO
MOTORE
FERMO
START

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 5 -
ESERCITAZIONE 4
Comando di motore asincrono trifase con avviamento stella-triangolo.
Si deve comandare un motore asincrono con avviamento a stella-triangolo.
L’arresto deve avvenire premendo il pulsante di STOP o agendo sul pulsante di EMERGENZA.
Determinare il numero di ingressi e di uscite e realizzare la tabella associativa.
Esempio fronte quadro di comando e controllo
AVANTI STOP EMERGENZA
MOTORE IN MOTO
MOTORE FERMO

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 6 -
ESERCITAZIONE 5
Comando di motore asincrono trifase con avviamento stella-triangolo a doppio senso di
marcia.
Si deve comandare un motore asincrono con doppio senso di marcia con pulsanti dedicati e il cui
avviamento è a stella-triangolo.
L’arresto deve avvenire premendo il pulsante di STOP o agendo sul pulsante di EMERGENZA.
Determinare il numero di ingressi e di uscite e realizzare la tabella associativa.
Esempio fronte quadro di comando e controllo
AVANTI INDIETRO STOP EMERGENZA
MOTORE AVANTI
MOTORE INDIETRO
MOTORE FERMO

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 7 -
ESERCITAZIONE 6
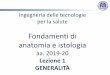
Comando di un nastro trasportatore.
Si deve comandare automaticamente un sistema di trasporto a nastri di trascinamento il cui
funzionamento è descritto dalla seguente sequenza:
1. in presenza del pallet davanti alla fotocellula Ftc1 si avvia il motore M1 che trascina il pallet
verso destra;
2. all’arrivo del pallet dinanzi alla fotocellula Ftc2 si avvia il motore M2;
3. all’uscita del pallet dalla fotocellula Ftc3 si deve arrestare il motore M1;
4. all’arrivo del pallet di fronte alla fotocellula Ftc4 si arresta il motore M2.
I motori dei nastri trasportatori sono del tipo trifase ad avviamento diretto a piena tensione. Il
quadro di comando e controllo è dotato:
di un pulsante di abilitazione macchina (non determina l’avviamento dei motori del nastro
trasportatore);
di un pulsante di disabilitazione macchina (determina l’arresto della macchina, portando
comunque a termine l’ultimo ciclo di lavoro);
di un pulsante di emergenza (blocco immediato delle macchina);
di una serie di segnalazioni luminose: Motore 1 in moto (lampeggiante), Motore 2 in moto
(lampeggiante), macchina abilitata (fissa).
Ftc1 Ftc2 Ftc3 Ftc4
Verso dello spostamento
M1 M2
START STOP EMERGENZA
M1 IN MOTO M2 IN MOTO MACCHINA
ABILITATA

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 8 -
ESERCITAZIONE 7
Gestione automatica di un semaforo intelligente.
Trattasi di un incrocio con un semaforo che arresta il flusso di traffico della strada principale per
lasciare passare un certo numero di auto che nel frattempo si sono accumulate in una strada laterale.
Il funzionamento è descritto dai seguenti punti:
1. se per un tempo uguale o superiore a 65 secondi sono presenti degli autoveicoli sul sensore
S1 deve scattare il rosso sulla strada principale e dopo 3 secondi scattare il verde del
semaforo della strada laterale;
2. il semaforo della strada laterale deve funzionare per un tempo di 35 secondi. Se
Successivamente blocca il flusso e permette lo scatto del verde dei semafori della strada
principale con un ritardo di 3 secondi;
Tutti i semafori hanno la stessa procedura di successione verde – giallo – rosso – verde. Tra il giallo
ed il rosso il ritardo deve essere impostato a 5 secondi.
Strada principale
S1
AUTO
AUTO
Strada secondaria

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 9 -
ESERCITAZIONE 8
Comando di riempimento automatico di un serbatoio.
Si deve riempire automaticamente un serbatoio mediante una pompa azionata da un motore
asincrono trifase ad avviamento stella/triangolo. Il funzionamento è descritto dalla seguente
sequenza:
1. premendo il pulsante START si abilita la macchina e si apre l’elettrovalvola di scarico
EV_scar;
2. quando il livello del liquido scende sotto il galleggiante G_avv, si avvia il motore M1 e si apre
l’elettrovalvola di carico EV_car;
3. quando il livello del liquido supera il galleggiante G_arr deve arrestarsi il motore M1 e
chiudersi la valvola EV_car;
4. se la pompa non carica il liquido, il livello nel serbatoio continua a scendere fino alla quota
controllata dal galleggiante G_min il cui intervento deve provocare l’arresto del motore M1 e la
chiusura delle elettrovalvole EV_car e EV_scar.
Le elettrovalvole sono del tipo normalmente chiuse a 230 Vac.
La segnalazione di minimo livello deve essere lampeggiante.
START STOP EMERGENZA
Min livello M1 in moto Abilitata
M1
EV_car
EV_scar
Arresto
caricamento
Avvio
caricamento
Min livello
G_arr
G_avv
G_min Ingresso
liquido

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 10 -
ESERCITAZIONE 9
Sistema automatico di timbratura
Sviluppare un sistema di controllo con il PLC per la macchina automatica rappresentata nella
figura qui sotto. Quando un pezzo viene posizionato sul nastro nella posizione 1 viene
automaticamente portato nella posizione 2. Raggiunta tale posizione, il nastro si ferma e il pezzo
viene timbrato (la timbratura deve durare 2 secondi). Dopo la timbratura il sistema deve trasportare il
pezzo verso la posizione 3 raggiunta la quale il pezzo viene rimosso manualmente dal nastro.
Solo un pezzo per volta è collocato sul nastro.
Prevedere tutti i sensori e pulsanti di comando.

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 11 -
ESERCITAZIONE 10
Sistema automatico di tempra
Un mandrino porta un pezzo metallico (una piastra metallica) in prossimità di una spira per mezzo
della quale il pezzo viene portato ad altissima temperatura. Successivamente la piastra metallica
viene raffreddata molto velocemente. Il risultato consiste nel conferimento di maggior durezza e
resistenza del metallo (processo di tempra). Il riscaldamento viene realizzato con un sistema
induttivo: una corrente elevata viene fatta scorrere nella spira circolare che contiene la piastra
metallica ed induce delle correnti parassite che riscaldano il pezzo. La spira ha dell’acqua fredda che
circola attraverso di essa in modo da impedire il raggiungimento di elevate temperature o di fondere.
Il raffreddamento viene provocato spruzzando acqua fredda sul pezzo. L’acqua di raffreddamento
è pompata nella parte più alta della spira e successivamente viene spruzzata sul pezzo attraverso dei
fori praticati sulla spira stessa. In questo modo viene temprata la superficie della piastra metallica.
La sequenza delle operazioni è la seguente:
1. viene premuto il pulsante di START
2. il pezzo è posizionato sul mandrino
3. entrambi i pulsanti START DX e START SX vengono premuti
4. il pezzo sale dal basso verso l’alto con un pistone ad aria compressa. Il sensore di presenza
pezzo sul mandrino deve essere impegnato prima che questo salga altrimenti deve rimanere
nella posizione di partenza
5. il mandrino è nella posizione in lato
6. il riscaldamento viene attivato per 20 secondi
7. il raffreddamento viene attivato per 15 secondi
8. il pezzo ritorna in basso disalimentando la valvola che ha determinato l’innalzamento
9. il pezzo viene rimosso

Esercitazione di Automazione Industriale
Classe 3a
Vers. 00/2015 - 12 -