Embed Size (px)
Citation preview

Electric Power Systems Research, 14 (1988) 83 - 89 83
Fault Diagnosis for an HVDC System: a Feasibility Study of an Expert System Application
PREM KUMAR KALRA Department of Electrical Engineering, Montana State University, Bozeman, MT 59717 (U.S.A.)
(Received August 19, 1987}
SUMMARY
This paper discusses techniques to deter- mine the type o f fault in an HVDC system. These techniques are computationally fast and economical. Possible methodologies to develop knowledge-based systems using hy- pothesized methods for the pattern matching are presen ted.
It was determined that more than one discriminant must be used to reach a desirable and reliable decision regarding the type o f disturbance. In addition, a method for im- proving the resolution o f the discriminants is discussed. Further, the influence o f the sampling rate on the discriminant values is reported. Sixty-four samples~cycle over the duration of interest for calculating the dis- criminants was found to be good enough to provide the necessary information.
INTRODUCTION
Adaptive controls for HVDC systems show bet ter results than fixed parameter controllers [1]. However, the convergence time required for the adaptive control algo- rithms can be significant [2]. To overcome the problem of slow convergence, the look-up table concept has been proposed [2] for real-time applications. One of the essential steps for the application of a look-up table is fast state identification in order to make decisions about the choice of controller parameters. However, state identification has not been well discussed in the power system control literature. Hence, some of the tech- niques used for other systems for state identification [3, 4] are examined for HVDC systems.
This paper is devoted to evaluating the effectiveness of various discriminants to
identify the various faults. It is assumed in the study that task-oriented VLSI chips can be designed to achieve the required speed of computat ion. The speed of computat ion is important because a fault duration of only 100 ms is to be utilized to perform the following tasks:
(i) calculate the discriminants; (ii) match patterns and test the hypothesis
of the discriminants to identify the fault; and (iii) change controller settings. It is proposed that in order to perform the
above-mentioned tasks, information about the signal may be utilized in the first two cycles.
DESCRIPTION OF VARIOUS DISCRIMINANTS
State identification is the most important aspect in the whole decision-making domain because the system status will confirm what decisions should/can be made and how the ou tpu t of the decision-making process has to be implemented.
The following classes of state-identification techniques are considered.
(i) Statistical techniques. This class can be divided further into subclasses as follows:
(a) mean value based decisions; (b) variance/standard deviation based
decisions; (c) kurtosis value based decisions; (d) skewness value based decisions.
(ii) Frequency domain techniques. Some- times it is easy to obtain information in the frequency domain and hence the following parameters may be used as discriminants:
(a) spectrum, (b) harmonic and frequency factors.
These techniques have been chosen from available techniques for the following reasons.
(i) They can be implemented wi thout performing complex mathematical calcula-
0378-7796/88/$3.50 © Elsevier Sequoia/Printed in The Netherlands

84
tions; consequently, the computer time needed to make decisions is small.
(ii) The algorithms give different discrimi- nant values for different faults, hence their authenticity and reliability is high.
(iii) The output of the algorithms can easily be related to decision processes.
APPLICATION OF V A R I O U S D I S C R I M I N A N T S
FOR F A U L T I D E N T I F I C A T I O N
Statistical techniques Mean, variance, skewness, and kurtosis
functions as defined below have been used for fault discrimination [5].
Mean
1 N = x , ( 1 )
i = l
Variance
1 N - - ~ (Xi - - P): (2)
U= Ni=l
Skewness
S _
N -
1 i=l
N (/3/2 (3)
Kurtosis
N -
1 i= l K - (4)
N 02
where X i is the value of the signal at the ith instant.
Frequency domain techniques The spectrum of each fault can also be
used as one of the discriminants [4]. How- ever, pattern matching for the spectrum is time intensive. Hence, new discriminants are defined which utilize the information con- tained in the spectrum.
Harmonic factor
i Gi 2 Gi2/fi 2 i = l "~
HF =
Vi 2 / i = l
( 5 )
Frequency factor
FF = (6)
\ where G~ is the power stored at the ith frequency, fi is the ith frequency, and the summation is over the given interval.
There can be a problem in calculating a spectrum because of wide variations or small changes in the signal of interest for various system disturbances. To amplify or limit these variations, a transformation is used, which is discussed next.
LOG T R A N S F O R M A T I O N
Normally, the cepstrum is used [5] to extract information from a signal about its frequency content. However, the dual of the cepstrum may be used to extract the charac- teristics of the signal in a time domain. The dual of the cepstrum may be calculated by applying the log transformation to the time domain signal. The log transformation has the following properties.
(a) The convolu t ion prob lem is e l iminated in the f requency domain. Any given function x(n) can take any of the following forms:
(i) it can be a simple function, e.g., x (n ) = sin tn or x (n ) = n.
(ii) it can be the product of two or more functions, e.g., x (n ) = x l(n) x2(n).
Information concerning x (n ) in the fre- quency domain can be determined by taking the Fourier transform of x(n) . However, in case (ii), the problem of frequency domain convolution must be solved. One method of overcoming the convolution problem is to take the log of x(n); e.g.
x(n) = xl(n ) x:(n) (7)
Taking the log of eqn. (7), we get
log x (n ) = log xl(n) + log x:(n) (8)
By defining
y(n) = log x(n)
y l ( n ) = log x l ( n )
and
yE(n) = log x2(n)

we get
y(n) = yl(n) + y2(n) (9)
Equation (9) follows superposition. In this way, the convolution problem can be elimi- nated.
(b)Faul t identifier. The properties of direct current are used to identify the faults because the frequency of short-circuit faults is much higher than tha t of open-circuit faults. During short-circuit faults the voltage may become zero and can cause a computa- tion problem for spectrum analysis.
The direct current is generally normalized to 1.0 p.u. to represent the steady-state value and the log of 1.0 is zero. Hence, any definite value of the log-transformed direct current will indicate the disturbance in the system.
(c) Trending. Data which are segregated can be compressed and wide variations can be smoothed with the use of a log transforma- tion. For example, if the variation in the signal is taken between 10 -6 and 100, this variation can be reduced to --6 to 2 by taking the log, and better trending can be obtained.
(d) Frequency domain information. The frequency domain information of the signal remains unaltered, e.g., if
y = a + b sin t
then
log y = log(a + b sin t)
RESULTS
The direct current signal has been used to calculate different discriminants. It was used for two main reasons. First, the probability of short-circuit faults is much higher than that of open-circuit faults. Secondly, it represents the equivalent current of the three phases of the AC system of the rectifier and inverter terminals. This minimizes the total number of measurements.
The investigations were carried out in the detailed system using EMTDC (electro- magnetic transient DC program) [6] to determine the influence of the sampling rate on the value of the discriminant.
It was observed for various faults that 64 samples/cycle is an opt imum number because the values of the discriminants do
85
not change significantly for more than 64 samples/cycle (see Appendix).
DECISION PROCEDURE
It is very important to make the right decision to identify the fault. It is observed from Tables A-1- A-3 in the Appendix that a good decision can be reached if more than one discriminant is used to identify the fault. The problem of computat ion time can be resolved by using a parallel processing tech- nique because all five discriminants can be calculated independently and simultaneously.
The experiment was repeated only three times because of the required computer time for the simulation of HVDC systems for different fault instants. It was observed that the trends of these discriminants remained unchanged. The values of the standard devia- tion, skewness, and kurtosis changed within only 2%. Variations in the harmonic index were negligible, but the changes in the fre- quency factors lay in the 5% range. Hence, it was decided not to use the frequency domain technique.
The standard deviations, skewness, and kurtosis were also calculated by performing the log transformation. It was determined that better resolutions of the discriminants can be obtained by using log transformation, as can be observed by comparing cases 3 and 5 shown in Tables A-1 and A-2 respectively.
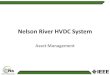
A decision can be reached if a minimum of two discriminants confirm the type of fault. The decision tree using these discriminants is shown in Fig. 1. It can be followed to identify the fault by using a number of IF statements.
DISCUSSION
Various frequency and time domain discriminants have been examined for identi- fying different faults using a pattern matching technique. The selection of these discrimi- nants was made on the basis of computat ion time and their resolution for discriminating various faults.
It was observed that , after determining the type of fault, the system and/or controller parameters may need to be changed for

86
Decision Tree
I Transients
Small Large Perturbation Perturbation
Go t! Fault Classifier
Co nges Actions in System
Configuration
i Steady State / ' , , Yes No--Go to
fault Classifier
Go to- =Yes Open Fault Classifier
Fault Classifier
• N o ~ Go to Short Circuit
Fault Classifier
Fig. 1. Decision tree for fault detection.
optimum system recovery. Hence, the signal time during which discriminants were calcu- lated may be considered to be two cycles, so that the remaining duration of the fault can be used to make changes in the system and controller parameters.
It was determined that the frequency domain discriminants did not produce the proper resolution for a signal duration of two cycles. Hence, another discriminant called standard deviation was also considered. It was observed that time domain discriminants provide better resolution. However, the standard deviation, skewness, and kurtosis should be considered together in reaching the fault identifying decision to improve the reliability. It was determined that 64 samples/ cycle is adequate to calculate these discrimi- nants.
In addition, the log transformation was suggested to improve the resolution of the various discriminants.
FUTURE WORK
This paper presents only primary results on the state identification techniques applied to an HVDC system feeding to a weak AC
system. However, this work may be extended further, as follows.
(a) The influence of various AC system configurations on the sending and receiving end values of the discriminants can be taken into account• This will allow the variation of the discriminant values for various ranges of short-circuit ratios for the rectifier and inverter AC system to be determined.
(b) Since direct current was chosen as the variable to calculate the various discriminants, it may be a good idea to determine the influence of current control gain and time constants on the values of the discriminants.
(c) Some other discriminants like the cepstrum, low pass filters, and auto-regressive moving averages may also be tried.
(d) The scope of this paper is limited to fault diagnosis but one may also wish to include small disturbances in the knowledge domain to determine small variations in operating conditions.
CONCLUSIONS
Various discriminants are discussed for fault identification for an HVDC system. The following conclusions may be drawn from the study reported in this paper.
(i) More than one discriminant must be used to identify the fault.
(ii) The fault can be identified by pattern matching of standard deviation, skewness, and kurtosis.
(iii) The resolution of discriminant values may be improved by using log transformation.
REFERENCES
1 S. Lefebvre, M. Saad and R. Hurtean, Adaptive control of HVDC power transmission systems, IEEE Trans., PAS-104 (1985) 2329 - 2335.
2 C. J. Harris and S. A. Billings (eds.), Self Tuning and Adaptive Control: Theory and Application, Peter Peregrinus, London, 1981.
3 A. Dyer and J. Stewart, Detection of rolling elements bearings damage by statistical vibration analysis, J. Mech. Des., 100 (1978) 229 - 235.
4 L. R. Rabiner and R. W. Schafer, Digital Proces- sing of Speech Signals, Prentice-Hall, Englewood Cliffs, NJ, 1978.
5 P. K. Kalra and R. M. Mathur, A way of building expert system for power system for monitoring and control, IASTED Conf. on Emerging Tech- nologies for Power Systems, MT, U.S.A., August 18 - 25, 1986.

A P P E N D I X
87
T A B L E A-1
Di sc r iminan t values for var ious fau l t s
Case Type of faul t S t a n d a r d Skewness Kur tos is No. of No. dev ia t ion samples /cyc le
1 S teady s ta te 0 . 0 2 0 5 9 - - 0 . 6 3 5 2 3 - - 0 . 8 5 8 8 5 8 2 DC line faul t a t inver te r 0 . 2 4 6 0 2 1 .07803 - - 0 . 0 9 4 3 0 3 Single-phase to g round faul t a t inver te r 0 . 16668 - - 0 . 6 0 0 9 5 - - 0 . 9 6 2 1 6 4 Three-phase faul t a t inver te r bus 0 . 4 7 6 2 3 - - 1 . 1 7 3 8 1 0 .40806 5 Single-phase to g round fau l t a t rec t i f ie r bus 0 .16237 0 .89047 - - 0 . 5 4 0 3 1 6 Three-phase to g round faul t a t rec t i f ie r bus 0 .36291 0 . 9 1 4 3 3 - - 0 . 4 9 6 2 9
1 S teady s ta te 0 . 0 1 9 7 0 - - 0 . 6 5 6 0 4 - - 0 . 8 2 2 5 7 2 DC line faul t a t inver te r 0 . 25599 1 .06310 - - 0 . 1 3 2 4 1 3 Single-phase to g round fau l t a t inver te r 0 .16631 - - 0 . 6 4 9 6 5 - - 0 . 8 2 0 2 3 4 Three-phase fau l t a t inver te r bus 0 .44255 - - 1 . 1 3 4 6 8 0 .40285 5 Single-phase to g round fau l t a t rec t i f ie r bus 0 .16691 0 .86735 - - 0 . 5 6 6 6 7 6 Three-phase to g round fau l t at rec t i f ier bus 0 . 3 7 3 5 6 0 .89082 - - 0 . 5 2 5 2 2
1 S teady s ta te 0 . 01926 - - 0 . 6 6 5 0 9 - - 0 . 8 0 8 7 3 2 DC line faul t at inver te r 0 . 26079 1 .05167 - - 0 . 1 6 2 8 7 3 Single-phase to g round fau l t at inver te r 0 . 1 6 6 7 0 - - 0 . 6 8 3 1 6 - - 0 . 7 2 3 6 5 4 Three-phase fau l t a t inver te r bus 0 . 4 2 6 6 0 - - 1 . 1 0 3 0 4 0 .35611 5 Single-phase to g round faul t a t rec t i f ie r bus 0 . 1 6 9 0 6 0 .85404 - - 0 . 5 8 5 9 0 6 Three-phase to g round fau l t a t rec t i f ie r bus 0 . 3 7 8 6 2 0 . 8 7 7 2 0 - - 0 . 5 4 6 0 3
1 S t eady s ta te 0 . 01904 - - 0 . 6 6 9 2 6 - - 0 . 8 0 2 9 4 2 DC line faul t at inver te r 0 . 2 6 3 1 4 1 .04508 - - 0 . 1 8 0 5 4 3 Single-phase to g round fau l t a t inver te r 0 . 1 6 7 0 3 - - 0 : 7 0 1 5 7 - - 0 . 6 7 1 4 5 4 Three-phase faul t a t inver te r bus 0 .41887 - - 1 . 0 8 4 0 9 0 .32083 5 Single-phase to g round fau l t a t rec t i f ie r bus 0 .17011 0 . 8 4 6 9 8 - - 0 . 5 9 6 8 8 6 Three-phase to g round fau l t a t rec t i f ier bus 0 . 3 8 1 0 8 0 .86997 - - 0 . 5 5 7 8 5
1 S t eady s ta te 0 . 0 1 8 9 3 - - 0 . 6 7 1 2 6 - - 0 . 8 0 0 3 4 2 DC line faul t a t inver te r 0 .26431 1 .04157 - - 0 . 1 8 9 9 5 3 Single-phase to g round fau l t a t inver te r 0 . 1 6 7 2 3 - - 0 . 7 1 1 1 1 - - 0 . 6 4 4 7 2 4 Three-phase fau l t a t inver te r bus 0 . 4 1 5 0 9 - - 1 . 0 7 3 8 6 0 .30025 5 Single-phase to g round faul t a t rec t i f ie r bus 0 . 1 7 0 6 2 0 .84335 - - 0 . 6 0 2 6 7 6 Three-phase to g round faul t at rec t i f ie r bus 0 . 3 8 2 2 9 0 .86625 - - 0 . 5 6 4 0 9
1 S t eady s ta te 0 . 01887 - - 0 . 6 7 2 2 4 - - 0 . 7 9 9 1 3 2 DC line faul t a t inver te r 0 . 2 6 4 8 9 1 .03977 - - 0 . 1 9 4 7 8 3 Single-phase to g round faul t a t inver te r 0 . 16734 - - 0 . 7 1 5 9 4 - - 0 . 6 3 1 2 5
4 Three-phase faul t a t inver te r bus 0 . 4 1 3 1 8 - - 1 . 0 6 8 5 5 0 .28919 5 Single-phase to g round fau l t a t rec t i f ie r bus 0 .17088 0 .84152 - - 0 . 6 0 5 6 5 6 Three-phase to g round faul t a t rec t i f ie r bus 0 . 3 8 2 8 9 0 .86437 - - 0 . 5 6 7 2 8
1 S teady s ta te 0 . 01885 - - 0 . 6 7 2 7 2 - - 0 . 7 8 9 5 4 2 DC line faul t a t inver te r 0 . 2 6 5 1 8 1 .03886 - - 0 . 1 9 7 2 4 3 Single-phase to g round faul t a t inver te r 0 . 1 6 7 4 0 - - 0 . 7 1 8 3 8 - - 0 . 6 2 4 4 8 4 Three-phase faul t a t inver te r bus 0 . 4 1 2 2 4 - - 1 . 0 6 5 8 4 0 .28347 5 Single-phase to g round fau l t a t rec t i f ie r bus 0 .17101 0 .84060 - - 0 . 6 0 7 1 5 6 Three-phase to g round fau l t a t rec t i f ie r bus 0 . 3 8 3 1 9 0 .86342 - - 0 . 5 6 8 9 0
16
32
64
128
256
256
512

88
T A B L E A-2
Disc r iminan t values for var ious faul ts for d i f f e ren t sampl ing ra tes w i th log t r a n s f o r m a t i o n
Case Type of fau l t S t anda rd Skewness Kurtosis No. of No. dev ia t ion samples /cyc le
1 S teady s ta te 0 . 02224 - - 0 . 6 5 9 2 0 - - 0 . 8 2 0 4 1 8 2 DC line faul t a t inver te r 1 .67518 - - 0 . 6 0 1 5 4 - - 0 . 0 2 2 0 0 3 Single-phase to g round fau l t a t inver te r 0 . 1 4 2 1 6 - - 0 . 7 4 4 1 9 - - 0 . 7 3 8 2 1 4 Three-phase faul t a t inver te r bus 0 .70071 - - 2 . 3 8 8 9 0 5 .08907 5 Single-phase to g round faul t a t rec t i f ier bus 0 .20271 0 .70728 - - 0 . 9 0 3 6 7 6 Three-phase to g round fau l t a t rec t i f ier bus 2 .10167 - - 1 . 0 2 8 3 9 0 .52254
1 S teady s ta te 0 . 0 2 1 2 6 - - 0 . 6 7 9 6 4 - - 0 . 7 8 2 8 6 2 DC line faul t a t inver te r 1 .51929 - - 0 . 3 6 7 8 5 - - 0 . 0 2 3 7 2 3 Single-phase to g round faul t a t inver te r 0 . 14275 - - 0 . 8 1 8 5 3 - - 0 . 4 9 1 5 0 4 Three-phase faul t a t inver te r bus 0 .58892 - - 2 . 4 6 7 9 1 6 .24159 5 Single-phase to g round faul t a t rec t i f ier bus 0 .20643 0 .67489 - - 0 . 9 4 1 8 1 6 Three-phase to g round fau l t a t rec t i f ier bus 2 .01688 - - 0 . 8 8 9 8 4 0 .05386
16
1 S teady s ta te 0 .02077 - - 0 . 6 8 8 4 0 - - 0 . 7 6 8 8 2 2 DC line faul t a t inver te r 1 .47865 - - 0 . 2 3 8 0 4 - - 0 . 0 2 6 6 3 3 Single-phase to g round fau l t a t inver te r 0 .14375 - - 0 . 8 6 9 2 5 - - 0 . 3 2 2 8 4 4 Three-phase fau l t a t inver te r bus 0 . 5 3 4 4 4 - - 2 . 3 9 7 3 4 6 .13425 5 Single-phase to g round faul t a t rec t i f ier bus 0 . 2 0 8 1 4 0 .65769 - - 0 . 9 6 3 0 0 6 Three-phase to g round faul t a t rec t i f ier bus 2 .00289 - - 0 . 8 6 7 8 4 - - 0 . 0 6 3 3 8
32
1 S teady s ta te 0 . 0 2 0 5 3 - - 0 . 6 9 2 4 0 - - 0 . 7 6 3 0 4 2 DC line faul t a t inver te r 1 .52101 - - 0 . 4 3 4 7 6 0 .02533 3 Single-phase to g round faul t a t inver te r 0 .14441 - - 0 . 8 9 6 7 5 - - 0 . 2 3 2 7 4 4 Three-phase faul t a t inver te r bus 0 .50846 - - 2 . 3 2 7 7 1 5 .80805 5 Single-phase to g round faul t a t rec t i f ie r bus 0 .20897 0 .64886 - - 0 . 9 7 4 0 1 6 Three-phase to g round fau l t a t rec t i f ier bus 2 .00063 - - 0 . 8 6 9 8 8 - - 0 . 0 7 0 5 8
64
1 S teady s ta te 0 .02041 - - 0 . 6 9 4 3 1 - - 0 . 7 6 0 4 7 2 DC line faul t a t inver te r 1 .52496 - - 0 . 4 5 2 1 7 0 .02122 3 Single-phase to g round faul t a t inver te r 0 .14478 - - 0 . 9 1 0 8 5 - - 0 . 1 8 7 0 9 4 Three-phase fau l t a t inver te r bus 0 .49596 - - 2 . 2 8 6 0 0 5 .58627 5 Single-phase to g round fau l t a t rec t i f ier bus 0 .20937 0 .64439 - - 0 . 9 7 9 6 1 6 Three-phase to g round fau l t a t rec t i f ier bus 1 .99903 - - 0 . 8 7 0 4 7 - - 0 . 0 7 4 8 9
128
1 S teady s ta te 0 . 02035 - - 0 . 6 9 5 2 3 - - 0 . 7 5 9 2 9 2 DC line faul t a t inver te r 1 .51677 - - 0 . 4 0 5 7 1 - - 0 . 0 2 1 1 1 3 Single-phase to g round faul t a t inver te r 0 .14497 - - 0 . 9 1 7 9 6 - - 0 . 1 6 4 2 2 4 Three-phase faul t a t inver te r bus 0 .48984 - - 2 . 2 6 3 8 2 5 .46453 5 Single-phase to g round faul t a t rec t i f ier bus 0 .20957 0 .64215 - - 0 . 9 8 2 4 2 6 Three-phase to g round fau l t a t rec t i f ier bus 1 .99829 - - 0 . 8 7 0 9 8 - - 0 . 0 7 6 3 2
256
1 S teady s ta te 0 . 02032 - - 0 . 6 9 5 6 9 - - 0 . 7 5 8 7 1 2 DC line faul t a t inver te r 1 .52055 - - 0 . 4 2 9 7 1 0 .02111 3 Single-phase to g round fau l t a t inver te r 0 .14507 - - 0 . 9 2 1 5 4 - - 0 . 1 5 2 7 7 4 Three-phase faul t a t inver te r bus 0 .48682 - - 2 . 2 5 2 4 6 5 .40155 5 Single-phase to g round fau l t a t rec t i f ier bus 0 .20966 0 .64102 - - 0 . 9 8 3 8 3 6 Three-phase to g round fau l t a t rect i f ier bus 1 .99777 - - 0 . 8 7 0 9 1 - - 0 . 0 7 8 1 8
512

T A B L E A-3
Di sc r iminan t values for var ious faul ts ( f r e q u e n c y d o m a i n analysis)
89
Case Type of fau l t H a r m o n i c F r e q u e n c y No. f ac to r f ac to r
Log t r a n s f o r m a t i o n
H a r m o n i c F r e q u e n c y fac to r f ac to r
No. of samples /cyc le
1 S teady s ta te 1.37 133.2 2 DC line faul t a t inver te r 1 .12 123.5 3 Single-phase to g round faul t a t inver te r 1 .00 119.3 4 Three-phase faul t a t inver te r bus 1 .13 123.9 5 Single-phase to g round faul t a t rec t i f ie r bus 1 .23 127.8 6 Three-phase to g round faul t a t rec t i f ie r bus 1.21 127.3
1 S teady s ta te 1 .32 131.3 2 DC line faul t a t inver te r 1 .13 124 .1 3 Single-phase to g round faul t a t inver te r 1 .00 119.3 4 Three-phase faul t a t inver te r bus 1 .05 121.7 5 Single-phase to g round faul t a t rec t i f ie r bus 1 .20 127.2 6 Three-phase to g round fau l t a t rec t i f ie r bus 1 .20 126.9
1 S teady s ta te 1 .29 129.2 2 DC line faul t a t inver te r 1 .13 124.0 3 Single-phase to g round fau l t a t inver te r 1 .00 119.3 4 Three-phase faul t a t inver te r bus 1.05 120.8 5 Single-phase to g round fau l t a t rec t i f ie r bus 1 .20 126.6 6 Three-phase to g round fau l t a t rec t i f ier bus 1 .19 126.4
1 S teady s ta te 1.27 129.3 2 DC line fau l t a t inver te r 1.13 124.0 3 Single-phase to g round fau l t a t inver te r 1 .00 119.4 4 Three-phase fau l t a t inver te r bus 1.04 120.4 5 Single-phase to g round faul t a t rec t i f ie r bus 1 .19 126.2 6 Three-phase to g round faul t a t rec t i f ie r bus 1 .19 126.0
1 S teady s ta te 1.26 128.9 2 DC line faul t a t inver te r 1 .13 124.0 3 Single-phase to g round faul t a t inver te r 1.01 119.4 4 Three-phase faul t a t inver te r bus 1 .04 120.4 5 Single-phase to g round fau l t a t rec t i f ie r bus 1.19 126.2 6 Three-phase to g r o u n d faul t a t rec t i f ie r bus 1 .18 126.0
1 S teady s ta te 1 .26 128.8 2 DC l ine faul t a t inver te r 1 .13 124.0 3 Single-phase to g round fau l t a t inver te r 1.01 119 .4 4 Three-phase faul t at inver te r bus 1 .04 120.3 5 Single-phase to g round fau l t a t rec t i f ie r bus 1 .19 126.1 6 Three-phase to g r o u n d faul t a t rec t i f ie r bus 1 .18 125.9
1 S teady s ta te 1 .26 128.7 2 DC line faul t a t inver te r 1 .13 124 .0 3 Single-phase to g round faul t a t inver te r 1.01 119.4 4 Three-phase faul t a t inver te r bus 1 .03 120.3 5 Single-phase to g round faul t a t rec t i f ie r bus 1 .19 126.1 6 Three-phase to g round fau l t a t rec t i f ie r bus 1 .18 125.9
1 S teady s ta te 1 .26 128.7 1.26 128.9 2 DC l ine fau l t a t inver te r 1.13 124.0 1.31 131.3 3 Single-phase to g round faul t a t inver te r 1.01 119 .4 1.02 119.9 4 Three-phase fau l t a t inver te r bus 1 .03 120.3 1.36 132.6 5 Single-phase to g round fau l t a t rec t i f ie r bus 1.19 126.1 1.13 124.0 6 Three-phase to g round faul t a t rec t i f ie r bus 1.18 125.9 1.15 124 .4
1.38 133.6 1.46 136.9 1.02 119.7 2 .10 159.4 1.15 124.9 1.03 120.2
1.33 130.2 1.54 132.2 1.02 119.8 1.96 146.1 1.15 124.3 1.32 123.7
1.30 130.2 1.33 132.2 1.02 119.8 1.69 146.1 1.14 124.3 1.13 123.7
1.28 129.5 1.26 129.4 1.02 119.8 1.52 138.7 1.14 124.1 1.13 123.9
1.27 129.2 1.31 131.2 1.02 119.9 1.40 135.2 1.13 124.1 1.14 124.2
1.27 129.0 1.32 131.6 1.02 120.0 1.38 133.7 1.13 124.0 1.14 124.3
1.26 128.9 1.30 131.1 1.02 120 .0 1.37 132.9 1.13 124 .0 1.14 124.4
16
32
64
128
256
512