Embed Size (px)
Citation preview

Flexural excitation in a standardtorsional-resonant column device
Giovanni Cascante, Carlos Santamarina, and Najwa Yassir
Abstract: The excitation of specimens in multiple modes enhances the characterization of granular materials. Thepurpose of this paper is to present the equipment modification and test procedure and data reduction for flexuralexcitation in a standard torsional-resonant column device. Typical results for dry and wet sand specimens are alsopresented. A salient advantage of the modified device is that it permits testing shear stiffness (torsional excitation) andlongitudinal stiffness (flexural excitation) at frequencies which are relevant to high-resolution seismics and near-surfacestudies (approx. 50–200 Hz). High attenuation in flexural mode is measured in saturated and partially saturatedspecimens; local flow is suspected as a prevailing loss mechanism. Velocity and damping ratios are complementaryindicators of saturation conditions prevailing in the specimen.
Key words: mechanical waves, resonant column, velocity, attenuation, sands, modal testing.
Résumé: L’excitation de spécimens en modes multiples améliore la caractérisation des matériaux pulvérulents. Le butde cet article est de présenter la modification de l’appareil, la procédure de l’essai et la réduction des données pourl’excitation en flexion dans un appareil standard de torsion à colonne résonnante. L’on présente aussi des résultatstypiques pour des spécimens de sable sec et humide. Un avantage certain de cet appareil modifié est qu’il permet demesurer la rigidité en cisaillement (excitation en torsion) et la rigidité longitudinale (excitation en flexion) à desfréquences qui sont applicables à des études de séismicité à haute-résolution et près de la surface (approximativementde 50 à 200 Hz). Une forte atténuation dans le mode en flexion est mesurée dans les spécimens saturés etpartiellement saturés; l’on soupçonne qu’un écoulement local est le mécanisme dominant de rupture. Les rapports devitesse et d’amortissement sont des indicateurs des conditions de saturation qui prédominent dans le spécimen.
Mots clés: ondes mécaniques, colonne résonnante, vitesse, atténuation, sables, mode d’essai.
[Traduit par la Rédaction] Cascante et al. 490
The study of particulate materials with longitudinal andtransverse wave propagation provides complementary infor-mation about fabric, state of stress, and fluid–skeleton inter-action without altering the fabric or causing permanenteffects. Furthermore, wave parameters determined in the lab-oratory under different excitation modes can be used to com-pute parameters applicable to other propagation modes inthe field (Fratta and Santamarina 1996).
Changes in lithology can be estimated from the ratio ofP-wave to S-wave velocitiesVP/VS. This ratio reflectschanges in porosity, clay content, and the aspect ratio ofpores (Toksöz et al. 1976; Domenico and Danbom 1987;Eastwood and Castagna 1987). Inelastic attenuation maycauseVP/VS to be frequency dependent. Damping adds addi-tional information: if the ratio of the compressional damping
to the shear damping coefficientDP/DS is greater than unity,VP/VS decreases with increasing frequency (Futterman 1962;Eastwood and Castagna 1987). Hence, the determination andanalysis of attenuation in multimode wave propagation stud-ies can enhance the state of the art in stratigraphic and litho-logic evaluations (Dutta 1987).
Attenuation and dispersion for strains less than 10–6 iscontrolled by the degree of fluid saturation and the fre-quency content of the wave (Winkler and Nur 1982). Mathe-matical models are available to predict wave velocity andattenuation in porous media with isolated or interconnectedpore spaces, with the general assumption that macrofluidflow does not develop as the wave propagates through themedium. Most studies have been conducted in rocks usinghigh-frequency waves (frequency of excitationf > 1 kHz).Experimental results in sandstones and porous glass showedthat DS/DP is greater than unity for full water saturation, butit is less than unity for partial saturation. Apparently, thelarge compressibility of the gas–water mixture enhancesfluid-flow mechanisms in the compressional mode (Murphy1982; White 1975).
This paper presents the modification of a standard reso-nant column to determine velocity and attenuation in speci-mens subjected to flexural and torsional excitations. Themodified device is used to conduct an exploratory study ofthe effect of saturation on low-strain wave velocity and at-tenuation. The operating frequency (between 50 and 200 Hz)
Can. Geotech. J.35: 478–490 (1998) © 1998 NRC Canada
478
Received February 7, 1997. Accepted January 20, 1998.
G. Cascante.Department of Civil Engineering, University ofWaterloo, Waterloo, ON N2L 3G1, Canada. e-mail:[email protected]. Santamarina. Department of Civil and EnvironmentalEngineering, Georgia Institute of Technology, Atlanta, GA30332-0355, U.S.A. e-mail: [email protected]. Yassir. CSIRO Petroleum, Victoria 3150, Australia.e-mail: [email protected]

© 1998 NRC Canada
Cascante et al. 479
Specimen andsequence
Void ratioe
Mass densityρ (kN s2/m4)
Degree ofsaturationSr (%)
Effective stressσo′ (kPa)
1 (na) 0.50 1.77 0.01 27–4002 (I) 0.50 2.10 100 35–4082 (II) 0.50 2.10 100 (back pressure) 41–2032 (III) 0.50 1.90 41 55–413
Table 1. Experimental conditions: chronology.
Fig. 1. Resonant column device. LVDT, linear voltage displacement transducer. (A) Instrumentation. (B) Torsional and flexuralexcitation.

approaches the frequency range used in near-surface geo-physical studies. Device modification and calibration, testprocedure, and relevant equations for data analysis are pre-sented first, followed by experimental results and discussion.
The resonant column torsional shear device is a laboratoryapparatus specifically designed to measure dynamic proper-ties of soils for shear strains between 10–6 and 10–2. The res-onant test is essentially nondestructive, therefore thedynamic properties can be evaluated at different confiningpressures for each soil specimen. The small shear strain pro-duced with the resonant column apparatus is in the same or-der of magnitude as that of geophysical in situ tests.
DeviceA resonant column for torsional excitation (Stokoe cell
SBEL D1128) was modified to excite both the torsional andthe flexural vibration modes. The test is run with a signalanalyzer. The input signal is a narrow band random noise.The resonant frequency and damping ratio were computedby curve-fitting the frequency response obtained with aver-age cross and auto spectra between the excitation coils andthe response of accelerometer (Fig. 1A). This procedure ismore robust than the one-point estimation based on reso-nance, or the three-point “half power” estimator (Cascanteand Santamarina 1997).
Transverse excitation was imposed with the same set ofmagnets and coils used in torsional excitation. In the originalconfiguration, the coils are connected in series to produce anet torque at the top of the specimen (Fig. 1B). In the modi-fied configuration, the coils are reconnected to produce a nethorizontal force at the top of the specimen (Fig. 1B). Thetype of excitation can be selected with a switch outside thechamber, without introducing any perturbation to the speci-men and its stress history.
The low-strain Young’s modulus computed from flexuraland longitudinal excitation is the same in single-phase mate-rials. However, this is not the case in water-bearing particu-late materials because of differences in fluid–matrixinteraction in flexural and longitudinal excitations. A specialtop cap was built to facilitate saturation. It includes a con-centric valve to avoid the effect of eccentric masses on tor-sional excitation. Before testing, the valve is closed and thetube used for saturation is disconnected and removed.
AnalysisThe free vibration analysis for a cantilever beam of length
L with a rigid mass at the free end indicates that the first res-onant frequency of the flexural modeωf depends on the posi-
tion of the rigid mass. The following equation is obtainedusing Rayleigh’s method and consideringN distributedmassesmi (Cascante 1996):
[1] ωfb
T
2
3
1
3
33140
0 1
=
+
=
∑
EI
L m m h h hii
N
i i( , )
where
[2] h h h mh h
Li i i
i i( , )( )
0 1 1 31 0
2= + +
++ +
34
1 1 0 02 22
h h h h
Li i i i
h0i andh1i are the heights at the bottom and the top, respec-tively, of massi, measured from the top of the soil speci-men; andE, Ib, andmT are Young’s modulus, area momentof inertia, and mass of the specimen, respectively. Equation[1] can be expressed in terms of the center of gravityyci andthe area moment of inertia with respect to the center of grav-ity Iyi of each massmi:
[3]
ωfb
Tc c
2
3
12
3
33140
3 9
4
=
+ + ++
=∑
EI
L m mm y
L
I m y
Li
i i
i
Nyi i i( )
The derivations of eqs. [1]–[3] are presented in Appendix2. Equation [3] assumes that the confinement is higher thanthe maximum axial stress induced by the flexural excitation.Therefore, no tension is applied to the soil specimen.
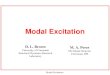
CalibrationThe mass, center of gravity, and area moment of inertia of
the driving plate and top cap are needed. In general, due tothe complex geometry of the driving system and top cap, theexperimental determination of the area moment of inertiaIyis preferred. A metal calibration specimen and a calibrationmass are used to measureIy using eq. [3]. The step-by-stepcalibration procedure follows (it parallels the calibrationprocedure conducted for the torsional mode):
(1) Measure the resonant frequency of the calibrationspecimen alone,ω1.
(2) Measure the resonant frequency of the calibrationspecimen with the added calibration mass at the top,ω2.
© 1998 NRC Canada
480 Can. Geotech. J. Vol. 35, 1998
Resonant frequency
SpecimenNo. Test conditionSr (%)
ExponentbS
ExponentbLF
Damping ratioDF/DS (Hz)
Torsion(Hz)
Flexion(Hz)
1 Dry 0.25 0.25 1.0 90–175 50–1012 100 (no back pressure) 0.26 0.24 3.0 100–187 55–992 100 (with back pressure) 0.25 0.23 2.5 105–160 61–862 41 (no back pressure) 0.24 0.21 2.5 115–189 65–101
Table 2. Summary of test results.

(3) Compute with eq. [2] the equivalent height of the cali-bration massha and the height of the top bar of the calibra-tion specimenhb.
(4) Set a system of two equations and two unknowns us-ing eq. [3] and parametersω1, ω2, ha, and hb. Solve for thearea moment of inertia of the driving plateIyp and the flex-ural stiffness of the calibration specimen 3EIb/L
3, assumingthat the center of gravity of the driving plate is at its geo-metrical center.
(5) Confirm the computed values by changing the verticalposition of the driving plate.
(6) The new flexural stiffness, computed with the mea-sured frequencyω3 and the new equivalent height of thedriving plate, must agree with values computed in step 4.
(7) If the geometry of the top cap is too complex to useeq. [2], measure its mass moment of inertia following theprevious steps once thatIyp is known.
The area moment of inertia of the driving systemIyp mustbe recalibrated whenever new transducers are added or mod-ifications are implemented. Likewise, eq. [3] has to be re-computed when masses are added to the top cap or when theposition of masses is changed. Errors in the position ofmasses and on the measurement of the specimen’s heighthave a significant effect on the computation of Young’smodulusE and the longitudinal wave velocityVLF; for ex-ample, a 5% error in the position of the driving plate or inthe specimen’s height can produce a 20% error in the com-puted wave velocity.
The resonant frequency of a cantilever beam gives an ac-curate method of measuring Young’s modulus from flexuralexcitation Eflex (eq. [3]) (Kolsky 1963). The longitudinalwave velocityVLF in a rod can be calculated fromEflex andthe density of the specimenρ:
[4] VE
LFflex=
ρ
This relation presumes that the wavelength is significantlylonger than the diameter of the bar and any internal scale inthe material (e.g., particle size).
There are significant differences between the strain fieldinduced in a specimen excited in flexural and longitudinalmodes. The former has a triangular-Navier variation ofstrain in the cross section, from tension to compression,whereas the latter has a constant strain distribution in agiven cross section. In addition, the axial strain in a cantile-ver beam with a transverse load at the free end varies lin-early along the longitudinal axis.
Wave-propagation parameters depend on the maximumstrain imposed. For the torsional mode, the maximum vol-ume – average shear strain is considered representative. Fol-lowing the same criterion, the maximum volume – averageaxial strainεavg for the flexural vibration mode is
[5] επ
εavg max= 23
where
[6] επmax
pkvolt=
Rg
SL f4 2 2
voltpk is the maximum output voltage of the accelerometer(in mV); R andL are the radius and length of the specimen,respectively (in cm);g is the acceleration due to gravity(in cm/s2); S= 99.2 mV/g is the sensitivity of the accelerom-eter; andf is the flexural resonant frequency (in Hz). Equa-tion [5] is derived in Appendix 2. Equation [6] assumes apure flexural motion; this can be verified with two acceler-ometers mounted on the driving plate. The volume change|∆vol| in either the tension side or the compression side ofthe specimen is
[7] | |∆vol max= 13
2R Lε
The instantaneous pore-pressure distribution in saturatedspecimens reflects the variations in strain field. The pressuregradient in longitudinal vibration is parallel to the verticalaxis of the specimen. Hence, fluid flow in Biot’s wave of thesecond type is out of phase with the solid matrix but in thesame direction. However, the pressure gradient is almosthorizontal in flexural vibration and the liquid tends to moveperpendicular to the motion of the solid matrix.
The form of interaction between the fluid and the matrixaffects wave velocity and attenuation. If the rate ofpore-pressure dissipation from diametrically opposed re-gions in the specimen is greater than the period of vibrationof the flexural mode, the longitudinal velocity from the flex-ural modeVLF is governed by the compressional stiffness ofthe matrix, even in saturated media.
The estimated volume of mobilized water due to the elas-tic deformation of the soil skeleton in this study is about0.04 cm3 (corresponds toεmax = 10–5, eq. [7]). This volumeis small enough to be accommodated at the membranesoil–pore interface. Then, the excess pore pressure causedby either longitudinal or flexural excitation would decay to-wards the membrane (transverse flow in both excitations).The effect of membrane compliance is maximized at lowfrequencies, and the compressional stiffness of the fluidwould not contribute to the P-wave velocity.
Tests with the modified resonant column were designed tostudy shear wave parameters and longitudinal wave parame-ters in sand specimens under isotropic loading and differentmoisture conditions. Two dense specimens were prepared,one for the air-dry test and one for the wet tests (saturatedand partially saturated conditions) and tested at low strainlevels (axial and shear strains <10–5).
Specimen preparationA uniform silica sand was used in this study (Barco sand
32, diameter for 50% passingD50 = 0.44 mm, maximumvoid ratio emax = 0.73, minimum void ratioemin = 0.49, spe-cific gravity of soil Gs = 2.65). Specimens were prepared bythe dry-pluviation technique and tamping every 2 cm to ob-tain a dense specimen and to minimize the effects ofchanges in void ratio during testing (relative densityDr ≈100%, specimen lengthL = 13.6 cm, diameterd = 7.1 cm).
© 1998 NRC Canada
Cascante et al. 481

Once the upper platen was set in place, vacuum was appliedto hold the specimen in place, and the split mold was re-moved. The wet specimen was prepared by allowing waterflow from bottom to top, first under capillary and gravita-tional forces and second by applying vacuum (15 cm of mer-cury), before the split mold was removed. The dry specimenwas confined with air. The wet specimen was surrounded bya water-filled cylinder to maintain saturation conditions.
Test sequencesThe confining pressure was increased in stages. Each load
increment was maintained until all microseismic eventsended (10–30 min). Torsional and flexural resonant frequen-cies and damping coefficients were measured at each loadstage. The air-dry specimen was isotropically loaded from27 to 400 kPa. Three tests were performed on the wet speci-men: (1) increase in effective isotropic confinement from 35to 408 kPa with zero back pressure; (2) increase in effectiveisotropic confinement from 41 to 203 kPa, followed by theincrease in back pressure from 0 to 450 kPa keeping the ef-fective stress constant at 200 kPa; and (3) effective loadingfrom 55 to 413 kPa with a degree of saturationSr = 40.6%.The chronology of the experimental study is summarized inTable 1. The void ratio was practically constant in all tests(Table 1). The maximum volume-average shear strainγ im-posed during torsional resonant testing was in the range of10–6 < γ < 10–5. This is in the same order of magnitude asthe maximum volume-average normal strain imposed duringflexural testing.
Air-dry test (specimen 1)Results for the air-dry specimen are presented in Fig. 2.
The curve of isotropic confinementσo versus axial strainεzindicates limited fabric changes, maximum axial strainε zmax . %=0 11 , and residual axial strainεr = 0.02%(Fig. 2A). The predicted behaviour for a simple-cubic (SC)packing is also shown (Santamarina and Cascante 1996; thefitting shear modulusG = 33 GPa; this value is low forquartz, and suggests the higher deformability ofnonspherical contacts and differences in fabric). Standardvelocity–stress power relations can be verified (e.g., Hardinand Drnevich 1972; Fam and Santamarina 1995) as follows:
[8] V a b= ′( )σo
where a and b are constants, andσo′ is effective confine-
ment. The curve-fitted exponent for shear waves isbs = 0.25during loading and unloading (Fig. 2B). This value suggestsone or more of the following situations: conical contacts,contact yield, and fabric densification (Goddard 1990;Cascante and Santamarina 1996). The shear damping coeffi-cient DS manifested low sensitivity to confinement, espe-cially for σo > 150 kPa, and values are similar for loadingand unloading (Fig. 2C).
Figure 3A shows that the computed longitudinal wave ve-locity VLF follows the standardV–σ power relationship withexponentbLF = 0.25. Changes in flexural dampingDF withconfinement were minimal (Fig. 3B). The ratioVLF/VS in-creased with increasing confinement from 1.42 to 1.46. Pois-son’s ratioν for a single-phase isotropic medium can becalculated fromVLF/VS:
[9] vV
V= −1
21
2
2LF
s
The computed Poisson’s ratio increases with confinementfrom 0.01 to 0.07. The longitudinal wave velocity in the rodVLF and the body P-wave velocity are related by
© 1998 NRC Canada
482 Can. Geotech. J. Vol. 35, 1998
Fig. 2. Dry specimen: torsional excitation. (A) Stress–straincurve and SC packing model. (B) Shear wave velocityVS vs.confinement. (C) DampingDS vs. confinement.

[10] V Vv
v vP LF= −
+ −1
1 1 2( )( )
Finally, the ratioDF/DS varied around 1.
Saturated test: no back-pressure (specimen 2)Results for the saturated specimen with zero back pres-
sure are presented in Fig. 4. Theσo–εz curve suggests limitedfabric changes (εr ≈ 0.00%, maximum axial strainεz-max =0.09%; Fig. 4A). Theσo–εz curve for the SC packing is alsoshown in Fig. 4A. TheVS–σo exponent isbs = 0.26 duringloading and unloading;VS is on average 3.4% smaller thanthat for specimen 1 (Fig. 4B, compare with Fig. 2B). How-ever, the increase in mass due to saturation should havecaused a 9.0% decrease in velocity (Table 1). Thus, theshear stiffnessGmax of specimen 2 (Gmax = V2ρ) was 11%higher than that for specimen 1. The shear damping coeffi-cientDS shows low sensitivity to confinement, similar trendsfor loading and unloading, and values 25% smaller thanDSin the air-dry specimen (Fig. 4C).
Figure 5A shows results for the computed longitudinalwave velocity (bLF = 0.24). VLF is smaller than that in theair-dry specimen; this reduction increases with confinement,from 5.4% at 35 kPa to 8.7% at 400 kPa. Note the lack ofparticipation of the bulk stiffness of the fluid. The flexural
dampingDF decreases with confinement, yet the salient ob-servation is that values ofDF in the saturated specimen are3.5 times higher than that in the dry specimen (Fig. 5B).
The ratioVLF/VS decreased with increasing confinement,showing an opposite trend and higher sensitivity to confine-ment than in the air-dry case (from 1.44 to 1.37). It is inap-propriate to compute Poisson’s ratio in this case due to the
© 1998 NRC Canada
Cascante et al. 483
Fig. 3. Dry specimen: flexural excitation. (A) Computedlongitudinal velocityVLF vs. confinement. (B) DampingDF vs.confinement.
Fig. 4. Saturated specimen: torsional excitation (zero backpressure). (A) Stress–strain curve and SC packing model.(B) Shear wave velocityVS vs. confinement. (C) DampingDS
vs. confinement.

fluid–matrix interaction (Thomsen 1996). The ratioDF/DSvaried around 3.0.
Saturated test: with back-pressure (specimen 2)A small amount of entrapped air can drastically reduce the
compressibility of fluids. Therefore, back pressure is used inthis test to ensure saturation. Following Head (1993), a backpressure of 250 kPa must be applied for 1 week to achieveSr= 100% when the initial saturation wasSr = 97%; this is aconservative estimate of initial saturation for this specimen.Thus, the test lasted for 9 days to ensure 100% saturation.
The effect of back pressure on the stress–strain responseσo–εz is shown in Fig. 6A (εr = 0.01%,εz-max = 0.06%). Dif-ferences between loading and unloading are mainly due totime effects. Theσo–εz curve for the SC model is alsoshown. TheVS–σo exponent isbS = 0.25 for loading and un-loading. Values ofVS andDS during effective isotropic load-ing are in agreement with the corresponding valuesmeasured on the saturated specimen without back pressure(Figs. 6B and 6C compared to Figs. 4B and 4C).VS andDSare practically constant while back pressure is increased atconstant effective stressσo
′ = 200 kPa. The minor fluctua-tions are correlated with±5 kPa variations in the effectivestress resulting from the independent control of cell and porepressures. This indicates that neither back pressure nor en-
hanced saturation affect the phenomena that contribute toshear stiffness or attenuation.
Figure 7 shows results for the longitudinal wave velocityVLF and attenuationDF computed from flexural excitationduring loading and unloading using back pressure (bLF =0.23). Values ofVLF and DF are also in agreement with thecorresponding values measured in the saturated specimenwithout back pressure (Figs. 5A and 5B).
© 1998 NRC Canada
484 Can. Geotech. J. Vol. 35, 1998
Fig. 5. Saturated specimen (zero back pressure): flexuralexcitation. (A) Computed longitudinal velocityVLF vs.confinement. (B) DampingDF vs. confinement.
Fig. 6. Saturated specimen: torsional excitation (with backpressure). (A) Stress–strain curve and SC packing model.(B) Shear wave velocityVS vs. confinement. (C) DampingDS
vs. confinement.

The ratio VLF/VS decreased with increasing confinementfrom 1.44 to 1.4, and remained constant during theback-pressurization cycle. The ratioDF/DS remained at 2.7during back pressurization.
Partial saturation test: no back pressure (specimen 2)The specimen was drained after the completion of the last
test, and the isotropic loading–unloading sequence was re-peated (Sr = 40.6%). The loading and unloading stress–strainresponse is almost the same as that observed earlier, reflect-ing no preloading effects (Fig. 8A;εr ≈ 0.00%, εz-max =0.08%). The computedVS–σo exponent isbS = 0.24 for load-ing and unloading. Values ofVS are approximately 5%higher than that in the saturated specimen without back pres-sure; this increase corresponds to the reduction in mass.Thus, the effect of capillarity on the true effective stress isnot important for these large-diameter grains. Shear dampingDS was practically constant and close to the measured valuesfor Sr = 100% with and without back pressure.
The computed longitudinal wave velocity is plottedagainst confinement in Fig. 9A (bLF = 0.21). Values of flex-ural dampingDF (Fig. 9B) agree with measured values inthe previous two tests with saturated specimens (Figs. 5B,7B). Overall, the ratiosVLF/VS and DF/DS showed similar
trends to values observed in the previous tests with saturatedspecimens.
Stress–strain plotsThe stress–strain curves for the two specimens were well
described by the same regular packing model. The minor
© 1998 NRC Canada
Cascante et al. 485
Fig. 7. Saturated specimen (with back pressure): flexuralexcitation. (A) Computed longitudinal velocityVLF vs.confinement. (B) DampingDF vs. confinement.
Fig. 8. Partially saturated specimen (Sr = 40.6%): torsionalexcitation. (A) Stress–strain curve and SC packing model.(B) Shear wave velocityVS vs. confinement. (C) DampingDS
vs. confinement.

differences in stiffness and residual strain among the twospecimens reflects specimen preparation effects.
Torsional excitation: velocityShear wave velocity presented consistent paths during
loading and unloading under all saturation conditions(Figs. 2B, 4B, 6B, and 8B). The velocity–stress exponentbSwas about the same for the air-dry and wet specimens (bs ≈0.25). Shear wave velocity was not sensitive to back pres-sure, as both effective stress and mass density remained con-stant (Fig. 6B). Capillary forces in the partially saturated testwere too small to affect low strain stiffness: based on theformulation by Biarez et al. (1993), the average interparticleforce due to capillarity is in the order of 10–5 N, whereas theaverage interparticle force due to confinement is in the orderof 10–2 N.
Torsional excitation: dampingShear dampingDS in these dense sands showed low sensi-
tivity to confinement, especially forσo > 100 kPa (Figs. 2C,4C, 6C, and 8C). Similar behaviour was observed insteel-sphere specimens by Santamarina and Cascante (1996).It can be argued that in a very dense sand, where the coordi-nation number is high, particle sliding and rotation are lim-ited, restricting the mobilization of friction. Dampingdecreased 25% from the air-dry case to the wet cases. This
may be because of specimen variability (Table 2) or theantilubricant effect of water on nonclean surfaces of sandparticles (Feda 1982).
Flexural excitation: velocityThe computed longitudinal wave velocityVLF showed
consistent trends for loading and unloading under the fourtest conditions (Figs. 3A, 5A, 7A, and 9A). The exponentbLF showed rheological effects, decreasing with time from0.24 to 0.21, suggesting the formation of a more stable fab-ric as the 2 week long test proceeded (Table 2). The veloc-ity–stress exponentbLF was equal tobS in the dry specimen,but it was slightly smaller thanbS in the wet tests (10%).Differences between exponents for shear waves andcompressional waves of Biot’s second type were reportedfor saturated sands by Richart et al. (1970), but the exponentof the second type of wave was higher than that as a conse-quence of the fluid–matrix interaction.
The longitudinal wave velocity computed from the flex-ural modeVLF reflected the stiffness of the soil matrix, likeBiot’s P-wave of the second type. This is because water canflow from the compression side to the tension side of thespecimen faster than half the period of the flexural excita-tion. Following a simplified pressure diffusion analysis,most of the pressure dissipates when the period of flexuralresonanceTflex is as follows:
[11] TgR
kG Vflex
s s
> 4 2
2
whereg is the acceleration due to gravity,R is the radius ofthe specimen,k is the permeability of the soil, andGS is thespecific gravity of soil particles. For the tested sand, eq. [11]suggests thatTflex must be greater than 1/500. Given thatresonant frequencies for the flexural mode vary between 50and 100 Hz (Table 2), it can be concluded that flexural exci-tation tested primarily the stiffness of the skeleton.
The velocityVLF decreased from the air-dry to the satu-rated conditions (5.4–8.7%). The expected decrease due tothe increase in mass density should have been 3.7%, esti-mated after correction for higher stiffness of specimen 2.Thus, it appears that the drag of the water in the pores re-duced the value ofVLF in the saturated specimen, and thiseffect increased with increasing confinement, which implieshigher frequencies. On the other hand, the increase inVLFfrom the fully saturated to the partially saturated case (Sr =40.6%) was independent of confinement and in agreementwith the expected increase due to the change in mass density(-5%). This suggests that the drag effect of the water wasalso present atSr = 40.6%, with the same magnitude as thatfor Sr = 100%. Furthermore, given that the longitudinalwave velocityVLF was governed by the stiffness of the ma-trix, it should not be sensitive to back pressure, in agreementwith experimental results (Fig. 7A).
Flexural excitation: dampingDamping DF presented a significant increase from the
air-dry to the wet cases (Figs. 3B, 5B, 7B, and 9B). Thisshows the importance of local flow and the relative move-ment of the water with respect to the soil skeleton. Hence,flexural excitation of saturated specimens provides evidence
© 1998 NRC Canada
486 Can. Geotech. J. Vol. 35, 1998
Fig. 9. Partially saturated specimen (Sr = 40.6%): flexuralexcitation. (A) Computed longitudinal velocityVLF vs.confinement. (B) DampingDF vs. confinement.

of high-energy dissipation mechanisms which are character-istic in Biot’s second type of compressional wave. Becausesmall volumes of water can be mobilized at contacts, localflow loss can also justify high losses in partially saturatedspecimens.DF displayed clearer rheological stabilization ef-fects thanDS (Figs. 6C, 7B). Therefore, the rheological sta-bilization of the soil skeleton affects the local flowmechanism.
Compressional wave velocityVP, Poisson’s ratioν, andratios VLF/VS and DF/DS
Equations [9] and [10] are valid when the porous mediumbehaves like an equivalent isotropic and elastic media. If thevelocity of the second type of wave is used in eq. [9] thecomputed Poisson’s ratio would be negative.
The Poisson’s ratio computed with eq. [9] for the air-drysand is small (ν < 0.07). This is the case of isotropic regularpackings subjected to small-strain perturbation at constantfabric (no change in coordination number, void ratio, anddistribution of contact forces) (Petrakis and Dobry 1987;Santamarina and Cascante 1996). Analytical solutions basedon conical or Hertzian contact predict Poisson’s ratio inde-pendent of the state of stress. Yet, experimental results withthe air-dry specimen show that small-strain Poisson’s ratioincreases with confinement. Theoretical results presented byWang and Nur (1992) agree with these observations. Theirmodel applies to a homogeneous and isotropic random pack-ing of elastic spheres, whereby neighboring spheres arefirmly bonded across small, flat, and circular regions of thesame average radius.
The ratio VLF/VS in the air-dry specimen increased withconfinement and reached a value of 1.46 at 400 kPa. This isclose to the value ofVP/VS = 1.49 measured for quartz (East-wood and Castagna 1987). The ratioVP/VS tends to the ratioVLF/VS whenn ≈ 0. In the case of the wet specimens, the ra-tio VLF/VS decreases with confinement becausebLF < bS dueto the fluid–matrix viscous interaction at higher frequencies(Table 2). Murphy (1982) observed similar behaviour for theVP/VS ratio for fully saturated sandstones.
The ratioDF/DS was about 1.0 for the dry specimen andvaried withinDF/DS = 3.5 ± 1.0 for the wet specimens. Thissignificant increase in attenuation reflects the effect of thelocal flow mechanism in the compressional excitation of sat-urated particulate materials. Thus, attenuation measurementcould be used to infer wet–dry conditions in granular materi-als as suggested by Murphy (1982) in the context of rocks.
Multimode excitation testing augments the characteriza-tion of particulate materials. Flexural and torsional reso-nance are suitable to study wave propagation characteristicsin particulate materials in a frequency range which is appli-cable to near-surface, high-resolution applications (between50 and 200 Hz). The standard torsional resonant column de-vice and test procedures were modified to permit the flex-ural excitation of the specimen.
The flexural excitation of saturated particulate media maynot be affected by the stiffness of the fluid. This depends onthe size of the specimen, its permeability, and the stiffness ofthe skeleton. Membrane compliance in flexible-wall cells
permits the pore pressure to decay towards the membrane inlongitudinal and flexural waves (transverse flow in both ex-citations). The effect of membrane compliance is maximizedat low frequencies. In this case, the stiffness of the fluiddoes not contribute to the longitudinal wave velocity. Flex-ural excitation highlights losses due to fluid–skeleton inter-action.
Longitudinal and shear wave velocities are affected by thestate of stress, but show little sensitivity to the stress history(fresh laboratory specimen made of dense quartzitic sand).Neither back pressure nor enhanced saturation affects thephenomena that contribute to stiffness in either flexural ortransverse excitation mode. The exponent in velocity–stressrelations is sensitive to rheological fabric stabilization.
The damping coefficientDS showed little sensitivity toconfinement in these dense specimens (Dr = 100%). Thehigh coordination number and rotational frustration re-stricted the mobilization of interparticle friction and reducedthe stress dependency of hysteretic attenuation.
The computed longitudinal wave velocityVLF changedunder saturation more than implied by the change in density.Fluid–matrix interaction increases energy losses. Local flowremains active at partial saturation; this loss mechanism de-cays at low saturation levels as the water menisci at contactsvanish.
The ratio DF/DS showed a significant increase from theair-dry condition (DF/DS ≈ 1) to the saturated and partiallysaturated conditions (DF/DS = 3.5 ± 1.0). Thus, attenuationprovides information independent of velocity with respect tothe saturation condition of the medium.
This research is part of a study on wave–geomedia inter-action and applications. Support was provided by the Natu-ral Sciences and Engineering Research Council of Canadaand the University of Waterloo ID Program.
Biarez, J., Fleureau, J.M., and Taibi, S. 1993. Constitutive modelfor unsaturated granular media.In Powders and grains.Editedby C. Thornton. A.A. Balkema, Rotterdam, The Netherlands,pp. 51–58.
Cascante, G. 1996. Low strain measurements with mechanicalwaves in geomaterials—experimental micromechanics. Ph.D.thesis, University of Waterloo, Waterloo, Ont.
Cascante, G., and Santamarina, J.C. 1996. Interparticle contact be-haviour and wave propagation. Journal of Geotechnical Engi-neering, ASCE,122(10): 831–839.
Cascante, G., and Santamarina, J.C. 1997. Low strain measure-ments using random noise excitation. Geotechnical Testing Jour-nal, 20(1): 29–39.
Domenico, S.N., and Danbom, S.H. 1987. Shear-wave technologyin petroleum exploration—past, current, and future.InShear-wave exploration. Geophysical development series. Vol.1. Edited byS.H. Danbom and S.N. Domenico. Society of Ex-ploration Geophysicists, Tulsa, Okla., pp. 3–18.
Dutta, N.C. 1987. Geopressure. Geophysics Reprint Series No.7.Society of Exploration Geophysicists, Tulsa, Okla.,pp. 227–229.
© 1998 NRC Canada
Cascante et al. 487

Eastwood, R.L., and Castagna, J.P. 1987. Interpretation of Vp/Vsratios from sonic logs.In Shear-wave exploration. Geophysicaldevelopment series. Vol. 1.Edited byS.H. Danbom and S.N.Domenico. Society of Exploration Geophysicists, Tulsa, Okla.,pp. 139–153.
Fam, M., and Santamarina, J.C. 1995. Study of complementarymechanical and electromagnetic wave measurements in anoedometer. Geotechnical Testing Journal,18(3): 307–314.
Feda, J. 1982. Mechanics of particulate materials—the principles.Developments in Geotechnical Engineering, Vol. 30.Elsevier-Academia, New York.
Fratta, D., and Santamarina, J.C. 1996. Wave propagation in soils:multi-mode, wideband testing in a waveguide device.Geotechnical Testing Journal,19(2): 130–140.
Futterman, W.I. 1962. Dispersive body waves. Journal of Geophys-ical Research,67(13): 5279–5291.
Goddard, J.D. 1990. Nonlinear elasticity and pressure-dependentwave speeds in granular media. Proceedings of the Royal Soci-ety of London, Series A,430: 105–131.
Hardin, B.O., and Drnevich, V.P. 1972. Shear modulus and damp-ing in soils: measurements and parameter effects. Journal of theSoil Mechanics and Foundations Division, ASCE,98: 603–624.
Head, K.H. 1993. Manual of soil laboratory testing. Vol. 3. Effec-tive stress tests. Pentech Press, London.
Kolsky, H. 1963. Stress waves in solids. Dover Publications Inc.,New York.
Murphy, W.F. 1982. Effects of partial water saturation on attenua-tion in massilon sandstone and Vycor porous glass. Journal ofthe Acoustical Society of America,71(6): 1458–1467.
Petrakis, E., and Dobry, R. 1987. Micromechanical modeling ofgranular soil at small strain by arrays of elastic spheres. Depart-ment of Civil Engineering, Rensselaer Polytechnic Institute,Troy, N.Y., Report CE-87-02, pp. 90–115.
Richart, F.E., Jr., Hall, J.R., and Woods, R.D. 1970. Vibration ofsoils and foundations. Prentice-Hall, Inc., Englewood Cliffs,N.J.
Santamarina, J.C., and Cascante, G. 1996. Stress anisotropy andwave propagation: a micromechanical view. CanadianGeotechnical Journal,33(5): 770–782.
Thomsen, L. 1996. Poisson was not a rock physicist, either! TheLeading Edge,15: 852–855.
Toksöz, M.N., Chen, C.H., and Timur, A. 1976. Velocities of seis-mic waves in porous rocks. Geophysics,44: 621–645.
Wang, Z., and Nur, A. 1992. Elastic wave velocities in porous me-dia: a theoretical recipe. Seismic and Acoustic Velocities in Res-ervoir Rocks, Vol. 2, pp. 1–35.
White, J.E. 1975. Computed seismic speeds and attenuation inrocks with partial gas saturation. Geophysics,40: 224–232.
Winkler, K., and Nur, A. 1982. Seismic attenuation: effects of porefluids and frictional sliding. Geophysics,47: 1–15.
a, b: constantsbS, bLF, bP: velocity–stress exponents for shear, longitudinal,
and compressional waves, respectivelyd: specimen diametere: void ratioemax, emin: maximum and minimum void ratios, respectivelyf: frequency of excitation (Hz)g: acceleration due to gravity (cm/s2)ha: equivalent height of the calibration masshb: height of the top bar of the calibration specimen
h0i, h1i: heights at bottom and top, respectively, of addedmassesmi (cm)
k: permeability of the soil (cm/s)mT: mass of the system (mi added masses at the top of the
specimen) (kN s2/m)voltpk: maximum output voltage of the accelerometer (mV)x: elevation from the base of the specimenxaccel: elevation of the accelerometery: horizontal displacement of the specimenyci: center of gravity of massmi, measured from the top of
the specimen (cm)ymeas: maximum flexural displacement of the specimenA: cross-sectional areaDS, DF: damping coefficients for torsional and flexural vi-
bration modes, respectivelyDP: compressional dampingDr: relative densityD50: diameter for 50% passingE, Eflex: Young’s modulus and Young’s modulus from flex-
ural excitation, respectively (kPa)Ib: area moment of inertia of the specimen (cm4)Iy: area moment of inertiaIyi: area moment of inertia of massmi (cm4)Iyp: area moment of inertia of the driving plateG, Gmax: shear modulus (kPa), maximum shear modulus
(kPa)GS: specific gravity of soil particlesJU: maximum internal potential energyJT: maximum kinetic energyL: length of the specimen (cm)N: total number of masses added at the top of the specimenR: radius of the specimen (cm)S: sensitivity of the accelerometer (mV/g)Sr: degree of saturationTflex: period of flexural resonanceV: velocityVS, VLF, VP: shear, longitudinal, and compressional wave ve-
locities, respectively (m/s)α: constant*∆vol*: volume change of the specimen due to tension or
compressionεavg: volume-average axial strain for flexural excitationεr: residual axial strains caused by isotropic loadingεz: axial strainεz-max, εmax: maximum axial strains caused by flexural excita-
tion and isotropic loading, respectivelyγ: shear strainρ: mass density of the specimen (kN s2/m4)σ: stressσo: isotropic confinement (kPa)σo
′ : effective confinementν: Poisson’s ratioωf, ωt: undamped flexural and torsional natural circular fre-
quencies, respectively (rad/s)ω1, ω2, ω3: resonant frequency of the calibration specimen
alone, with the added calibration mass at the top, andwith a changed vertical position of the driving plate, re-spectively
© 1998 NRC Canada
488 Can. Geotech. J. Vol. 35, 1998

Resonant Frequency: Rayleigh’s methodThe mode shape for the horizontal displacementy of the
specimen at elevationx is assumed to be a third-order poly-nomial:
[A1] y x a a x a x a x( ) = + + +0 1 22
03
At the lower plate (corresponding to elevationx = 0) the dis-placement and the tangent arey(0) = 0 andy′(0) = 0, respec-tively. Hence,a0 = 0 anda1 = 0. Neglecting the moment atthe top endx = L, Eiy′ ′(L) = 0. Then, eq. [A1] becomes
[A2] y x x L x x L( ) [ ]= − <α 2 3 for
whereα is a constant given byα = (a2/3L). Equation [A2]also represents the elastic deformation of a cantilever beamwith a transverse load at the free end. The horizontal dis-placement of rigid masses placed above the specimen are es-timated from the horizontal displacementy(L) and thetangenty′(L) at the top of the specimen:
[A3] y x L L x( ) )] for= + − <α 2 2 3[ ( L x L
The maximum internal potential energyJU (extreme defor-mation) is computed by taking into consideration only theinternal energy in the deformed specimen:
[A4] J EI y x x J EI LL
U b U bd= ′ ′ =∫12
60
2 2 3( ) , α
whereE is the Young’s modulus, andIb is the area momentof inertia. The maximum kinetic energyJT (maximum veloc-ity) is computed by presuming harmonic oscillation with fre-quencyωf. The component for the specimen is
[A5] J A y x x J L mL
T1 f T1 f Td= =∫12
3370
2
0
2 2 2 6ρω ω α( ) ,
whereA is the cross-sectional area. The kinetic energy for aconcentrated mass added at a distanceh above the specimencan be evaluated using eq. [A3] withh = (x – L):
[A6] J m L L hT2 = +12
2 32 2[ ( )]α
J m LhL
hL
T2 = + +
α 2 62
2 692
Finally, the circular resonant frequency for the flexural modeis computed by equating the maximum internal potential en-ergy JU and the maximum kinetic energyJT1 + JT2:
[A7] ωfb
T
2
2
3
33140
1 394
=
+ + +
EI
m mhL
hL
L3
The previous equation can be extended toN massesmi. Eachmass has a mass densityρi and cross-sectional areaAi, and isuniformly distributed from heighth0i to h1i (measured fromthe top end of the specimen, Fig. A1). Then
[A8] ωfb
T
2
1
3
3
33140
0 1
=
+
=
∑
EI
m m h h h Lii
N
i i( , )
where
[A9]
h h hh h
L
h h h h
Li i
i i i i i i( , )( ) ( )
0 1 13 0 1
2
3 0 0 1 1
4
2 2
2= + + +
+ +
Equation [A9] can be written in terms of the centre of grav-ity yci and the mass moment of inertiaIyi of each massmi:
[A10] h y I( )ci yi, = + + +
13 9
4 22y
L L
I
myci yi
ici
Average axial strainThe axial strain at elevationx and at distancer from the
neutral plane is
© 1998 NRC Canada
Cascante et al. 489
Addedcalibration mass Screws
Aluminumbar
DrivingMagnets
Aluminumspecimen
Base aluminumbar
h0h1
Fig. A1. Calibration setup for flexural excitation.

© 1998 NRC Canada
490 Can. Geotech. J. Vol. 35, 1998
[A11] ε α( , ) ( )x ry
xr L x r= ⋅ = ⋅ − ⋅d
d
2
26
For the circular column with radiusR and total volumeV,the average strain is defined in terms of the tension or com-pression side as
[A12] ε εavg d d= ⋅ ⋅∫12 2V
x r A xV
( , )
Hence,
[A13] ε αavg d d= ⋅ − ⋅ ⋅ − ⋅
⋅∫∫2
6 200
2 2
VL x r R r r x
RL
( )
επ
αavg = ⋅ ⋅ ⋅4R L
The value ofα is computed from eq. [A3] with the maxi-mum flexural displacementymeas measured at the elevationof the accelerometerxaccel:
[A14] α =+ −y
L L x Lmeas
accel2 2 3[ ( )]
The average strain can be related to the maximum strainexperienced at the lower edge of the specimenεmax =6·α·L·R. Replacing in eq. [A13],
[A15] επ
εavg max= 23