Embed Size (px)
Citation preview

Fonctions circulaires
X Utiliser le cercle trigonométrique, notamment pour :
– déterminer les cosinus et sinus d’angles associés ;– résoudre dans R les équations d’inconnue x : cos x = cos a et sin x = sin a.
Objectifs
1 – Mesure des angles
Le cercle trigonométrique est le cercle de centre O et de rayon 1, orienté dans le sens trigonométrique(opposé au sens de rotation des aiguilles d’une montre).
1
−1
1−1
+
O
On note I le point de coordonnées I(1; 0). Soit M un point du cercle trigonométrique.
Alors une mesure en radians de l’angle IOM est la longueur de l’arc intercepté⌢
IM .
α
O
bM
bI
bα en radians = longueur de
⌢
IM
Si l’angle est orienté dans le sens anti-trigonométrique (dans le sens des aiguilles d’une montre), alorson attribue un signe négatif à sa mesure.
Le cercle trigonométrique
TS1 Systèmes Photoniques – 2017 / 2018 1 Lycée Fresnel - Paris
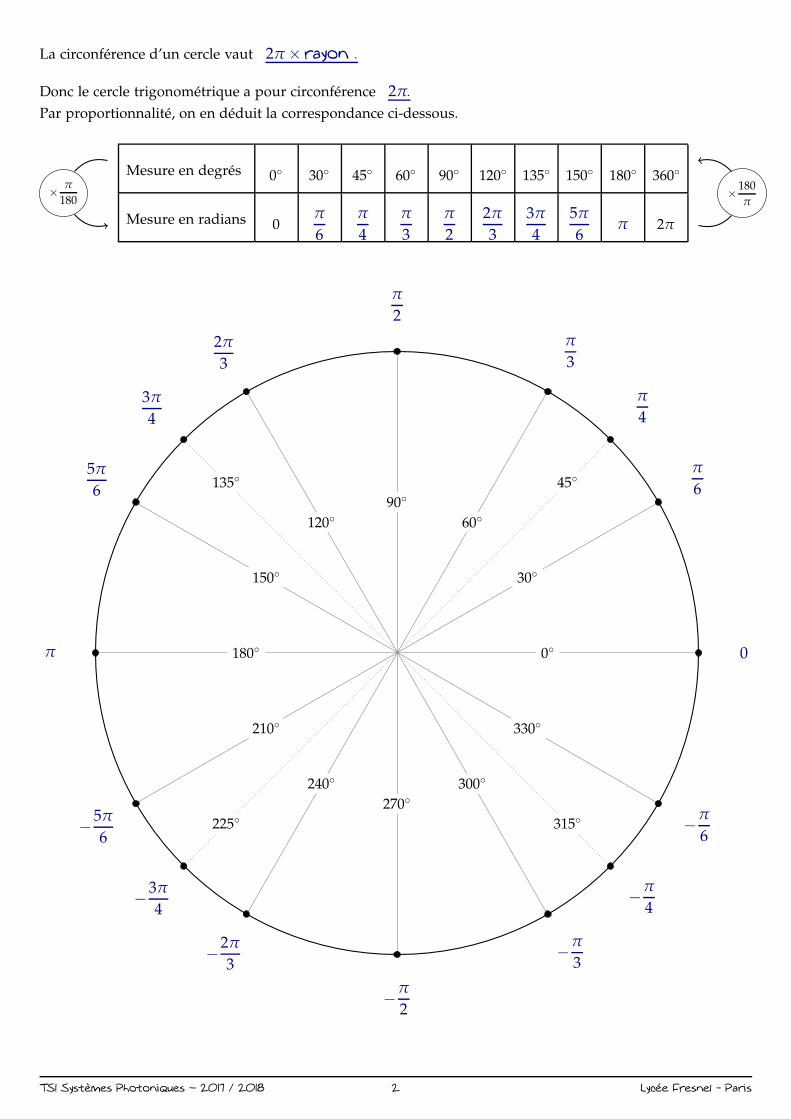
La circonférence d’un cercle vaut 2π × rayon .
Donc le cercle trigonométrique a pour circonférence 2π.Par proportionnalité, on en déduit la correspondance ci-dessous.
Mesure en degrés 0◦ 30◦ 45◦ 60◦ 90◦ 120◦ 135◦ 150◦ 180◦ 360◦
Mesure en radians 0π
6π
4π
3π
22π
33π
45π
6π 2π
×180π
× π
180
45◦135◦
225◦ 315◦
π
6
π
3
π
2
2π
3
5π
6
π
−5π
6
−2π
3
−π
2
−π
3
−π
6
0
π
43π
4
−3π
4−π
4
0◦
30◦
60◦90◦
120◦
150◦
180◦
210◦
240◦
270◦300◦
330◦
TS1 Systèmes Photoniques – 2017 / 2018 2 Lycée Fresnel - Paris
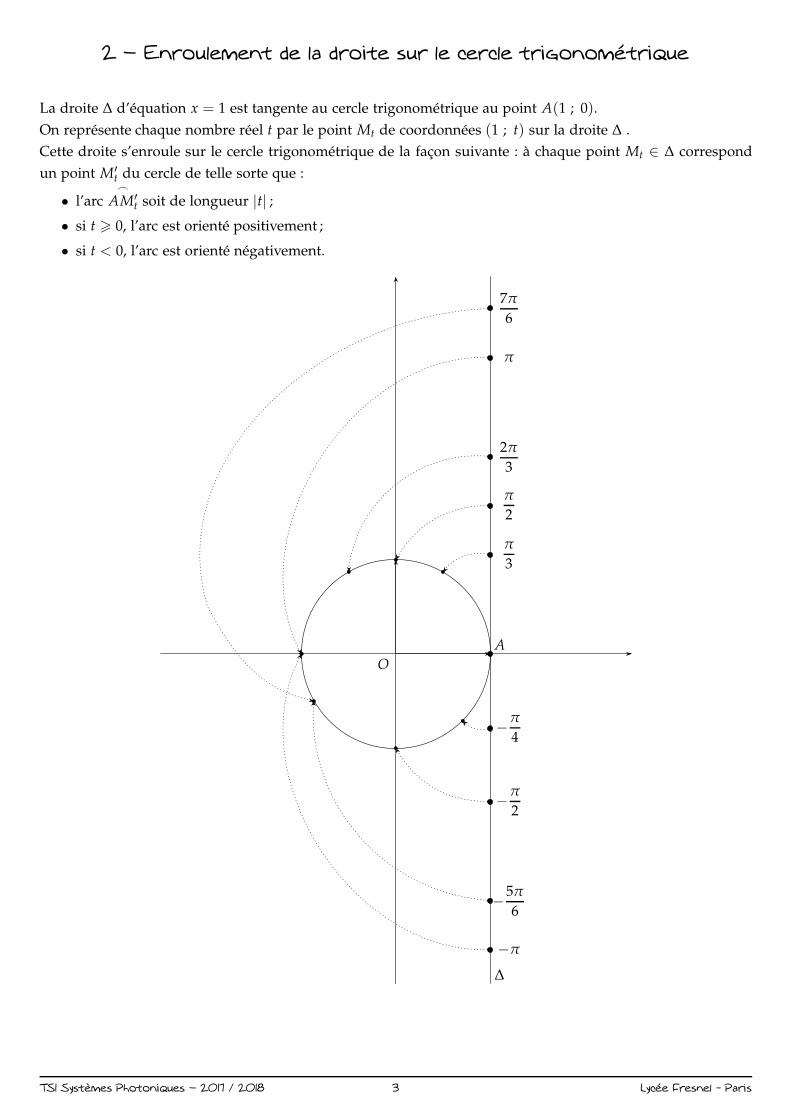
2 – Enroulement de la droite sur le cercle trigonométrique
La droite ∆ d’équation x = 1 est tangente au cercle trigonométrique au point A(1 ; 0).
On représente chaque nombre réel t par le point Mt de coordonnées (1 ; t) sur la droite ∆ .Cette droite s’enroule sur le cercle trigonométrique de la façon suivante : à chaque point Mt ∈ ∆ correspond
un point M′t du cercle de telle sorte que :
• l’arc⌢
AM′t soit de longueur |t| ;
• si t > 0, l’arc est orienté positivement ;
• si t < 0, l’arc est orienté négativement.
O
A
∆
π
3
π
2
2π
3
π
7π
6
−5π
6
−π
2
−π
4
−π
TS1 Systèmes Photoniques – 2017 / 2018 3 Lycée Fresnel - Paris
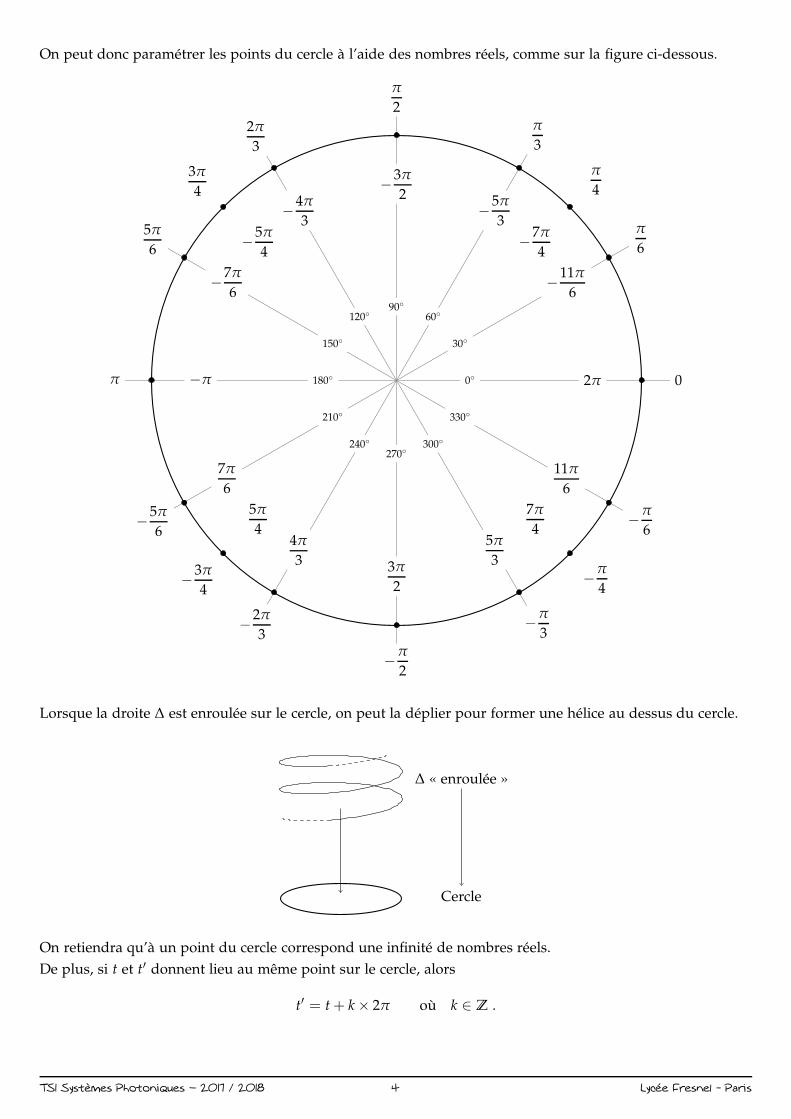
On peut donc paramétrer les points du cercle à l’aide des nombres réels, comme sur la figure ci-dessous.
0◦
30◦
60◦90◦
120◦
150◦
180◦
210◦
240◦270◦
300◦
330◦
π
43π
4
−3π
4−π
4
π
6
π
3
π
22π
3
5π
6
π
−5π
6
−2π
3
−π
2
−π
3
−π
6
0
−11π
6
−5π
3
−3π
2−4π
3
−7π
6
−π
7π
6
4π
3 3π
2
5π
3
11π
6
2π
−7π
4−5π
4
5π
47π
4
Lorsque la droite ∆ est enroulée sur le cercle, on peut la déplier pour former une hélice au dessus du cercle.
∆ « enroulée »
Cercle
On retiendra qu’à un point du cercle correspond une infinité de nombres réels.De plus, si t et t′ donnent lieu au même point sur le cercle, alors
t′ = t + k × 2π où k ∈ Z .
TS1 Systèmes Photoniques – 2017 / 2018 4 Lycée Fresnel - Paris
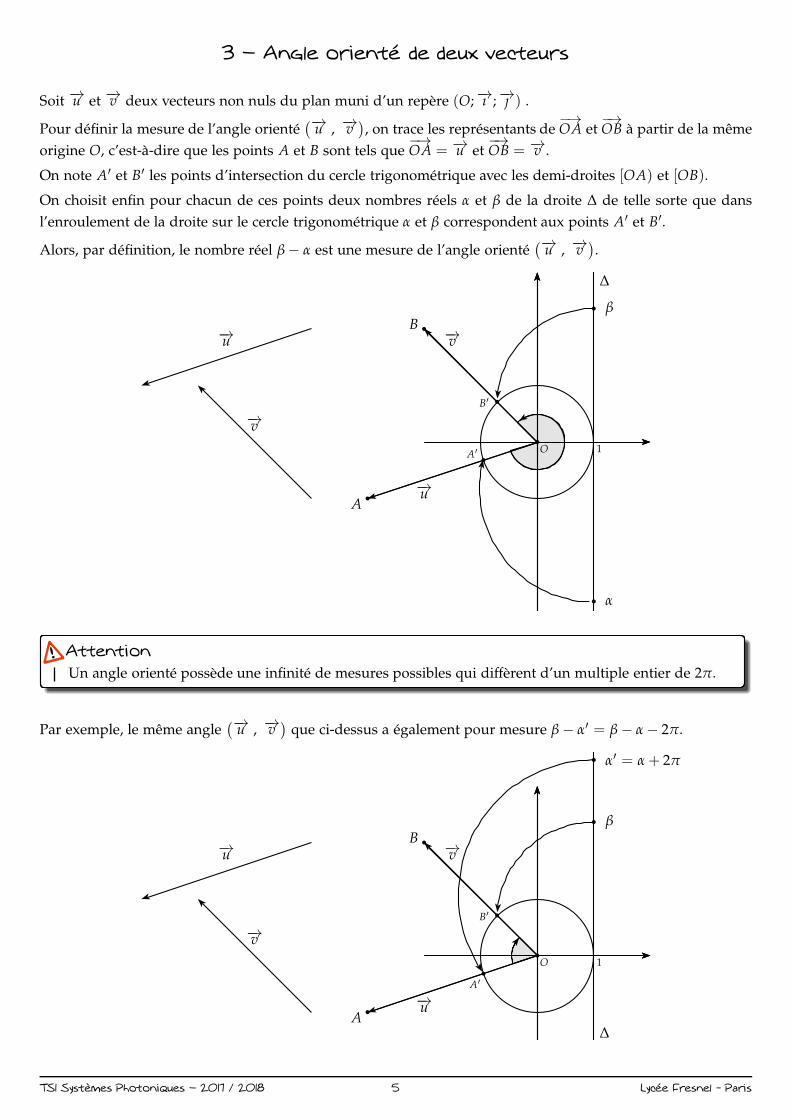
3 – Angle orienté de deux vecteurs
Soit −→u et −→v deux vecteurs non nuls du plan muni d’un repère (O;−→ı ;−→ ) .
Pour définir la mesure de l’angle orienté(−→u , −→v
), on trace les représentants de
−→OA et
−→OB à partir de la même
origine O, c’est-à-dire que les points A et B sont tels que−→OA = −→u et
−→OB = −→v .
On note A′ et B′ les points d’intersection du cercle trigonométrique avec les demi-droites [OA) et [OB).
On choisit enfin pour chacun de ces points deux nombres réels α et β de la droite ∆ de telle sorte que dansl’enroulement de la droite sur le cercle trigonométrique α et β correspondent aux points A′ et B′.
Alors, par définition, le nombre réel β − α est une mesure de l’angle orienté(−→u , −→v
).
b
O 1b
b
b β
∆
b α
−→u
−→v
−→v
−→u
B
A
b
b
B′
A′
Un angle orienté possède une infinité de mesures possibles qui diffèrent d’un multiple entier de 2π.Attention
Par exemple, le même angle(−→u , −→v
)que ci-dessus a également pour mesure β − α′ = β − α − 2π.
b
O 1b
b
b β
∆
b α′ = α + 2π
−→u
−→v
−→v
−→u
B
A
b
b
B′
A′
TS1 Systèmes Photoniques – 2017 / 2018 5 Lycée Fresnel - Paris
Comme la mesure d’un angle orienté n’est défini qu’à un multiple entier de 2π près, on écrira :
(−→u , −→v)= a + k × 2π , k ∈ Z
où a désigne une mesure quelconque de l’angle orienté(−→u , −→v
).
On écrit aussi : (−→u , −→v)= a (modulo 2π)
l’expression « modulo 2π » signifiant : « à un multiple entier de 2π près ».
On rencontre également dans la littérature les écritures synonymes suivantes :
(−→u , −→v)= a (mod. 2π)
(−→u , −→v)= a [2π]
(−→u , −→v)≡ a (2π) .
Notation
4 – Propriétés des angles orientés
Pour tous vecteurs non nuls −→u , −→v et −→w :
(−→u , −→v)+
(−→v , −→w)=
(−→u , −→w)
(modulo 2π)
Propriété (relation de Chasles)
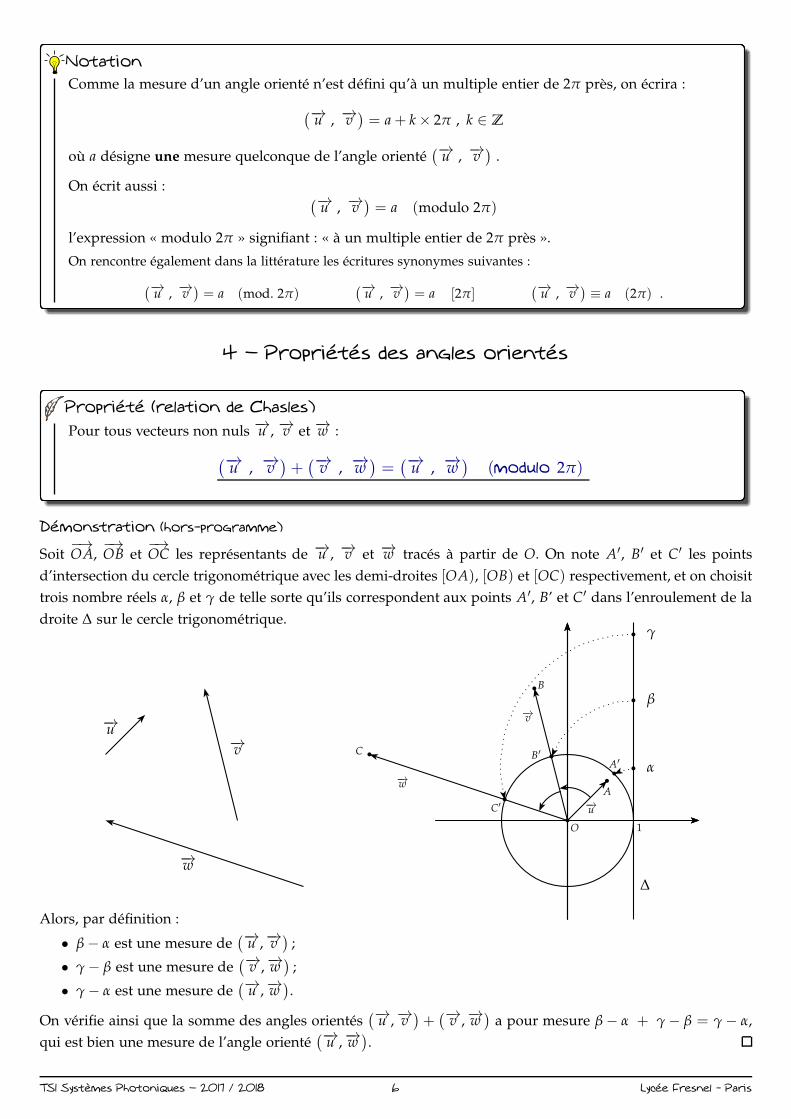
Démonstration (hors-programme)
Soit−→OA,
−→OB et
−→OC les représentants de −→u , −→v et −→w tracés à partir de O. On note A′, B′ et C′ les points
d’intersection du cercle trigonométrique avec les demi-droites [OA), [OB) et [OC) respectivement, et on choisittrois nombre réels α, β et γ de telle sorte qu’ils correspondent aux points A′, B’ et C′ dans l’enroulement de la
droite ∆ sur le cercle trigonométrique.
b
O 1
b α
b β
b γ
∆
−→u
−→u−→v
−→v−→w
−→w
C
B
A
b
b
b
C′
B′A′
b
b
b
Alors, par définition :
• β − α est une mesure de(−→u ,−→v
);
• γ − β est une mesure de(−→v ,−→w
);
• γ − α est une mesure de(−→u ,−→w
).
On vérifie ainsi que la somme des angles orientés(−→u ,−→v
)+
(−→v ,−→w)
a pour mesure β − α + γ − β = γ − α,qui est bien une mesure de l’angle orienté
(−→u ,−→w).
TS1 Systèmes Photoniques – 2017 / 2018 6 Lycée Fresnel - Paris
Pour tous vecteurs non nuls −→u et −→v :
(−→v ,−→u)= −
(−→u ,−→v)
(modulo 2π) −→u
−→v
−→u
−→v
b b
(−→u ,−−→v)=
(−→u ,−→v)+ π (modulo 2π)
−→u
−→v
−−→v
b b
(−−→u ,−→v
)=
(−→u ,−→v)+ π (modulo 2π) −→u
−→v
−−→ub b
(−−→u ,−−→v
)=
(−→u ,−→v)
(modulo 2π)−→u
−→v
−−→v
−−→ub b
Propriétés
Démonstration
• D’après la relation de Chasles,(−→u ,−→v
)+
(−→v ,−→u)=
(−→u ,−→u)= 0 (modulo 2π), donc :
(−→v ,−→u)= −
(−→u ,−→v)
(modulo 2π) .
• D’après la relation de Chasles,(−→u ,−−→v
)=
(−→u ,−→v)+
(−→v ,−−→v)=
(−→u ,−→v)+ π (modulo 2π).
• De même,(−−→u ,−→v
)=
(−−→u ,−→u
)+
(−→u ,−→v)= π +
(−→u ,−→v)
(modulo 2π).
• D’après la relation de Chasles,(−−→u ,−−→v
)=
(−−→u ,−→u
)+
(−→u ,−→v)+
(−→v ,−−→v)= −π +
(−→u ,−→v)+ π =
(−→u ,−→v)
(modulo 2π) .
Parmi toutes les mesures possibles d’un angle orienté, une seule appartient à l’intervalle ]− π ; π].
On appelle ainsi mesure principale d’un angle orienté
l’unique mesure de cet angle qui appartient à l’intervalle ]− π ; π].
Définition (mesure principale)
DémonstrationSoit α une mesure d’un angle orienté. En ajoutant ou en retranchant un multiple entier de 2π, on trouvenécessairement une mesure α0 ∈]− π ; π].
TS1 Systèmes Photoniques – 2017 / 2018 7 Lycée Fresnel - Paris
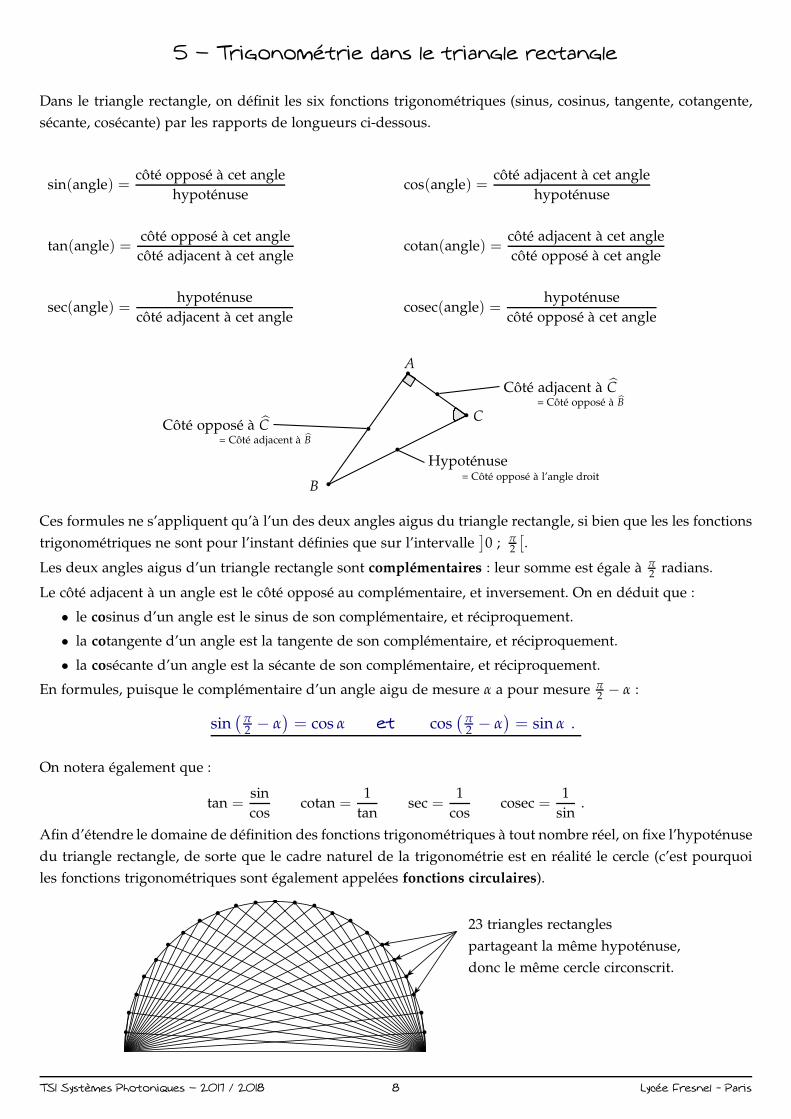
5 – Trigonométrie dans le triangle rectangle
Dans le triangle rectangle, on définit les six fonctions trigonométriques (sinus, cosinus, tangente, cotangente,sécante, cosécante) par les rapports de longueurs ci-dessous.
sin(angle) =côté opposé à cet angle
hypoténusecos(angle) =
côté adjacent à cet anglehypoténuse
tan(angle) =côté opposé à cet anglecôté adjacent à cet angle
cotan(angle) =côté adjacent à cet anglecôté opposé à cet angle
sec(angle) =hypoténuse
côté adjacent à cet anglecosec(angle) =
hypoténusecôté opposé à cet angle
bB
bA
b C
Hypoténuse= Côté opposé à l’angle droit
Côté adjacent à C= Côté opposé à B
Côté opposé à C= Côté adjacent à B
Ces formules ne s’appliquent qu’à l’un des deux angles aigus du triangle rectangle, si bien que les les fonctions
trigonométriques ne sont pour l’instant définies que sur l’intervalle]0 ; π
2
[.
Les deux angles aigus d’un triangle rectangle sont complémentaires : leur somme est égale à π2 radians.
Le côté adjacent à un angle est le côté opposé au complémentaire, et inversement. On en déduit que :
• le cosinus d’un angle est le sinus de son complémentaire, et réciproquement.
• la cotangente d’un angle est la tangente de son complémentaire, et réciproquement.
• la cosécante d’un angle est la sécante de son complémentaire, et réciproquement.
En formules, puisque le complémentaire d’un angle aigu de mesure α a pour mesure π2 − α :
sin(
π2 − α
)= cos α et cos
(π2 − α
)= sin α .
On notera également que :
tan =sincos
cotan =1
tansec =
1cos
cosec =1
sin.
Afin d’étendre le domaine de définition des fonctions trigonométriques à tout nombre réel, on fixe l’hypoténuse
du triangle rectangle, de sorte que le cadre naturel de la trigonométrie est en réalité le cercle (c’est pourquoiles fonctions trigonométriques sont également appelées fonctions circulaires).
b
b
b
b
b
b
b
bb
bbbbbb
b
b
b
b
b
b
b
b
23 triangles rectangles
partageant la même hypoténuse,donc le même cercle circonscrit.
TS1 Systèmes Photoniques – 2017 / 2018 8 Lycée Fresnel - Paris
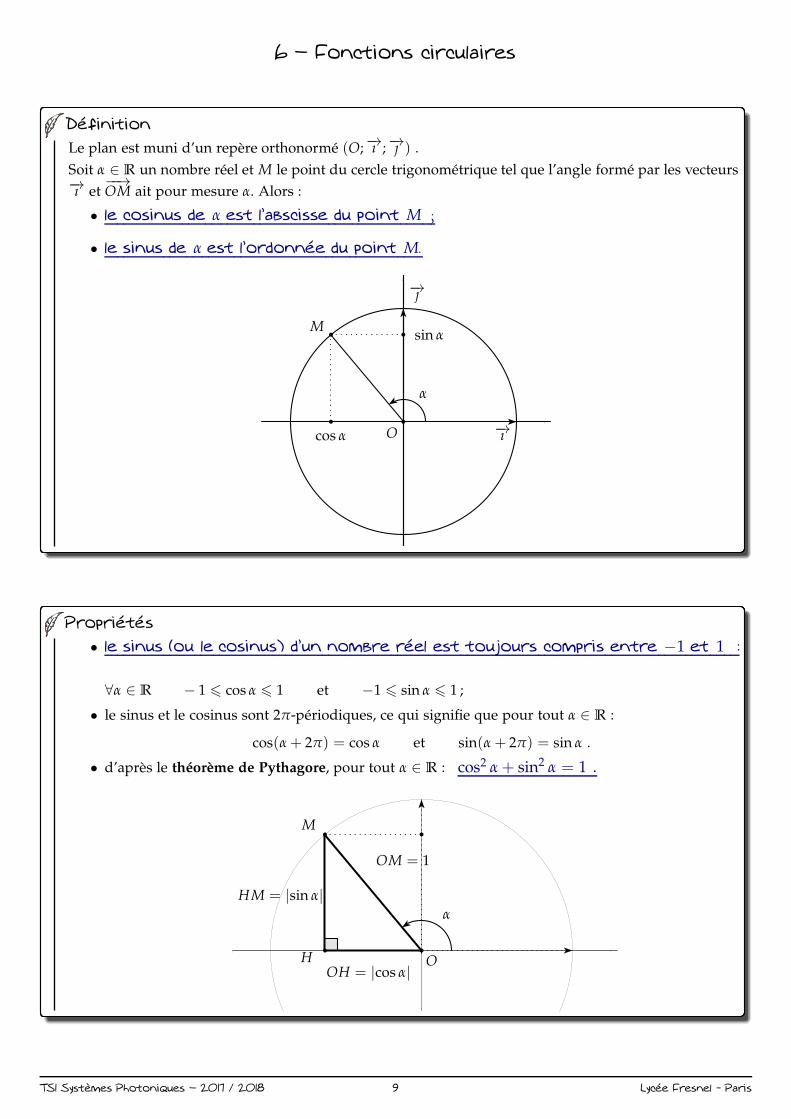
6 – Fonctions circulaires
Le plan est muni d’un repère orthonormé (O;−→ı ;−→ ) .
Soit α ∈ R un nombre réel et M le point du cercle trigonométrique tel que l’angle formé par les vecteurs−→ı et
−−→OM ait pour mesure α. Alors :
• le cosinus de α est l’abscisse du point M ;
• le sinus de α est l’ordonnée du point M.
b
O
bM
−→
−→ı
α
b sin α
b
cos α
Définition
• le sinus (ou le cosinus) d’un nombre réel est toujours compris entre −1 et 1 :
∀α ∈ R − 1 6 cos α 6 1 et −1 6 sin α 6 1 ;
• le sinus et le cosinus sont 2π-périodiques, ce qui signifie que pour tout α ∈ R :
cos(α + 2π) = cos α et sin(α + 2π) = sin α .
• d’après le théorème de Pythagore, pour tout α ∈ R : cos2 α + sin2 α = 1 .
b
O
bM
α
b
HM = |sin α|
b
HOH = |cos α|
OM = 1
Propriétés
TS1 Systèmes Photoniques – 2017 / 2018 9 Lycée Fresnel - Paris
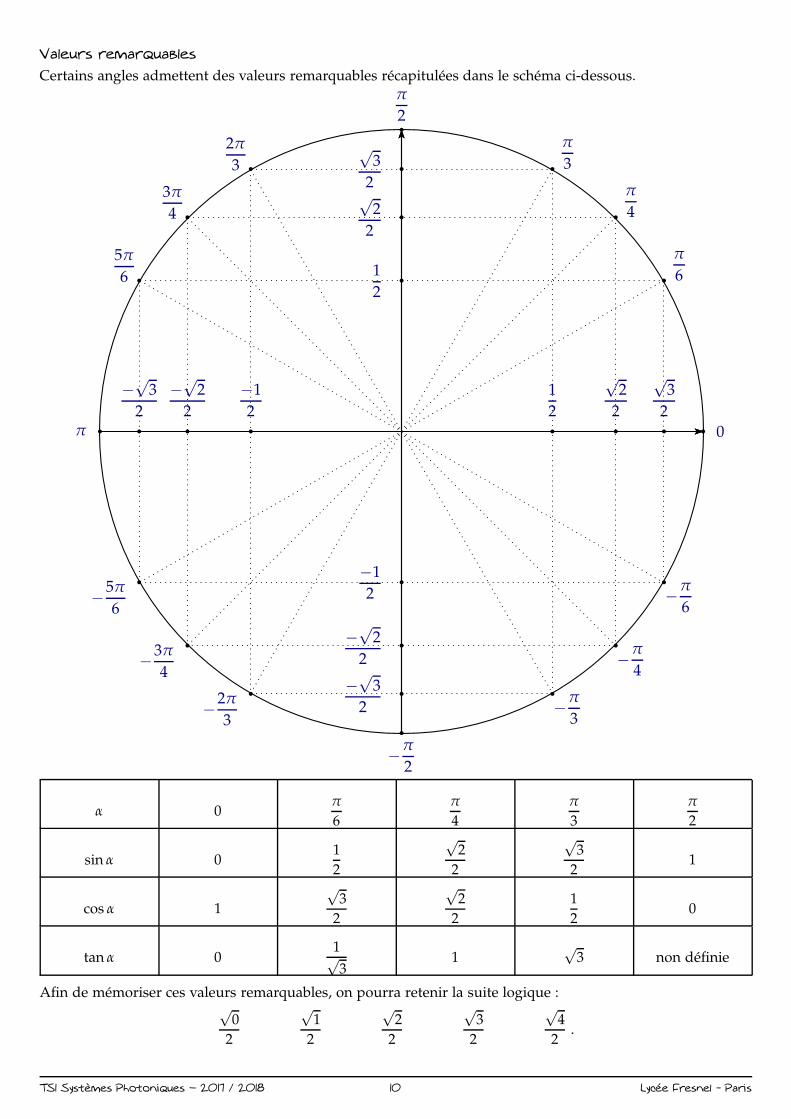
Valeurs remarquablesCertains angles admettent des valeurs remarquables récapitulées dans le schéma ci-dessous.
b
b
b
b
b
b
b
b
b bbbbbb
b
b
b
b
b
b
b
b
b
b b
b
b
√3
2−√
32
√2
2−√
22
−12
12
12
√2
2
√3
2
−12
−√
22
−√
32
π
3
π
6
π
4
2π
3
5π
6
3π
4
−π
3
−π
6
−π
4
−2π
3
−5π
6
−3π
4
π
2
−π
2
0π
α 0π
6π
4π
3π
2
sin α 012
√2
2
√3
21
cos α 1
√3
2
√2
212
0
tan α 01√3
1√
3 non définie
Afin de mémoriser ces valeurs remarquables, on pourra retenir la suite logique :√
02
√1
2
√2
2
√3
2
√4
2.
TS1 Systèmes Photoniques – 2017 / 2018 10 Lycée Fresnel - Paris
7 – Relations entre sinus et cosinus
Le cosinus est pair , le sinus est impair . Pour tout α ∈ R :
cos(−α) = cos α et sin(−α) = − sin α .
b
O
b
bb
M
M′
α
−α
bsin α
− sin α
b
cos α
Parité
Pour tout α ∈ R : cos (π − α) = − cos α et sin (π − α) = sin α.
b
O
bb
b
b
b
MM′
α−α
π − α
sin α
b
cos α− cos α
Angles supplémentaires
Pour tout α ∈ R : cos(α + π) = − cos α et sin (α + π) = − sin α.
b
O
b
b
b
b
M
M′
αα + π
bsin α
− sin α
b
cos α
− cos α
Ajout d’un demi-tour
TS1 Systèmes Photoniques – 2017 / 2018 11 Lycée Fresnel - Paris
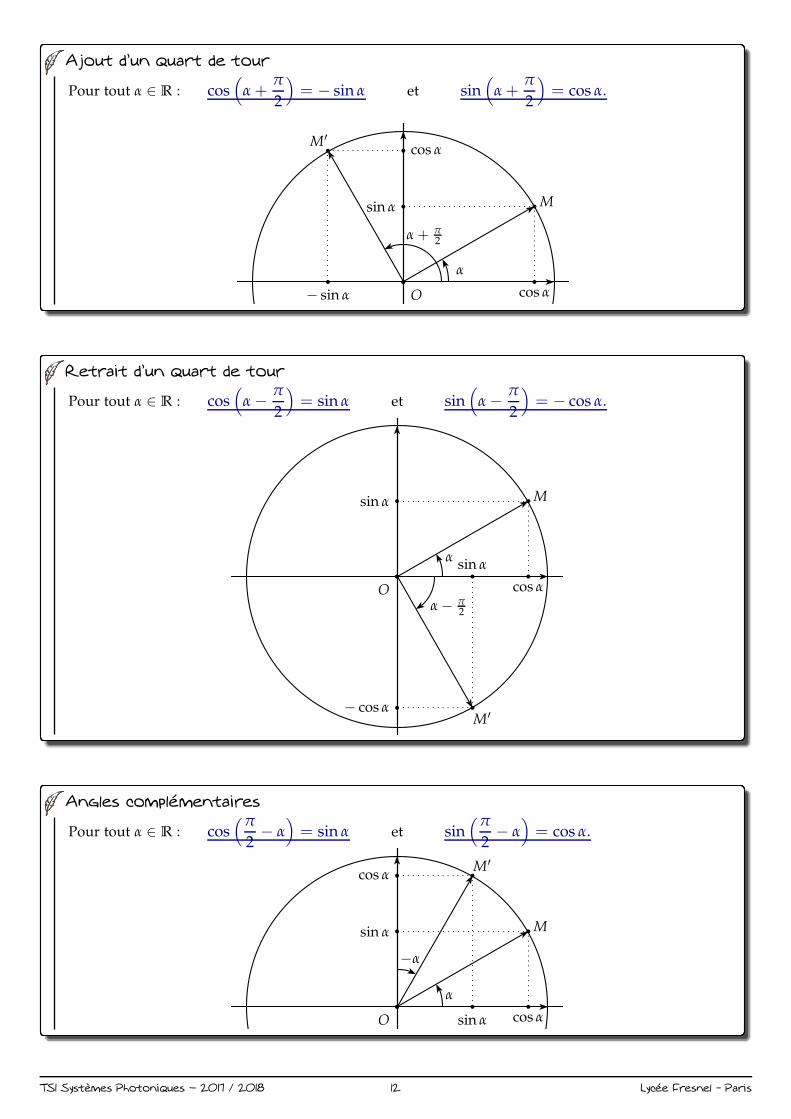
Pour tout α ∈ R : cos(
α +π
2
)= − sin α et sin
(α +
π
2
)= cos α.
b
O
b
b
b
b
M
M′
α
α + π2
b
b
cos α
sin α
b
cos α− sin α
Ajout d’un quart de tour
Pour tout α ∈ R : cos(
α − π
2
)= sin α et sin
(α − π
2
)= − cos α.
b
O
b
b
b
b
b
b M
M′
α
α − π2
− cos α
sin α
b
cos α
sin α
Retrait d’un quart de tour
Pour tout α ∈ R : cos(π
2− α
)= sin α et sin
(π
2− α
)= cos α.
b
O
b
b
b
b
b
b M
M′
α
−α
cos α
sin α
b
cos αsin α
Angles complémentaires
TS1 Systèmes Photoniques – 2017 / 2018 12 Lycée Fresnel - Paris
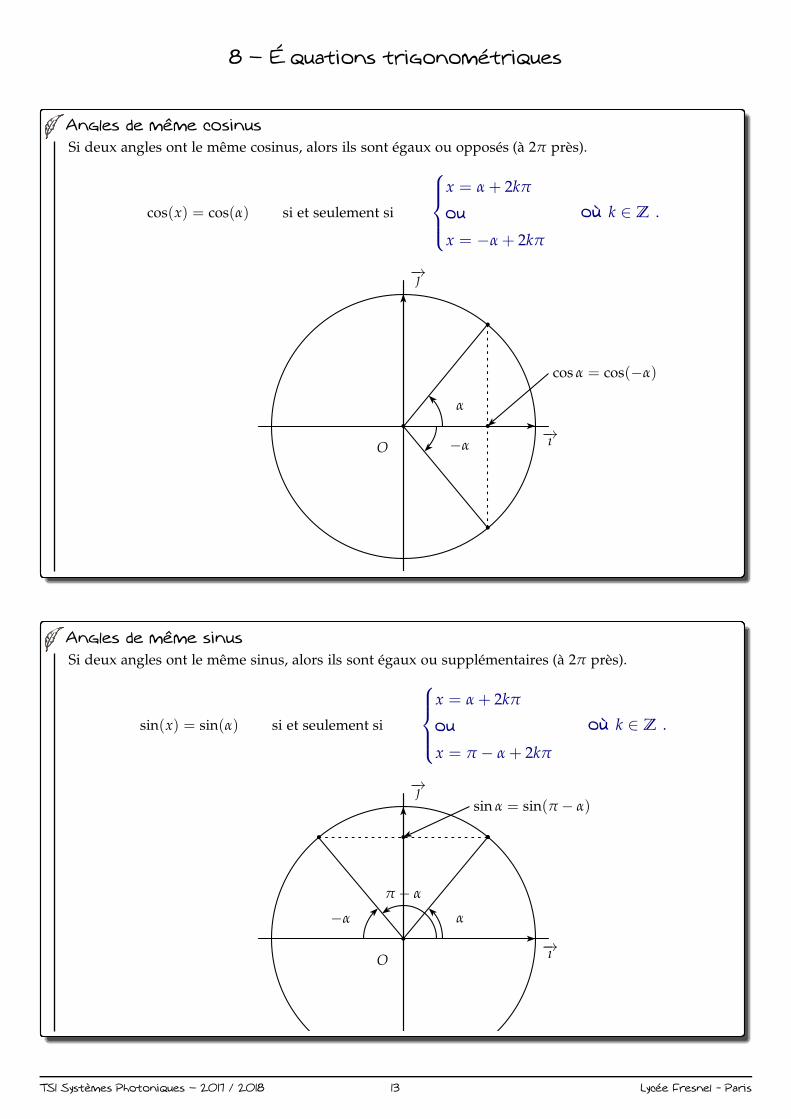
8 – Équations trigonométriques
Si deux angles ont le même cosinus, alors ils sont égaux ou opposés (à 2π près).
cos(x) = cos(α) si et seulement si
x = α + 2kπ
ou
x = −α + 2kπ
où k ∈ Z .
b
O
b
b
−→
−→ı
α
−α
b
cos α = cos(−α)
Angles de même cosinus
Si deux angles ont le même sinus, alors ils sont égaux ou supplémentaires (à 2π près).
sin(x) = sin(α) si et seulement si
x = α + 2kπ
ou
x = π − α + 2kπ
où k ∈ Z .
b
O
b
−→
−→ı
α
b b
−α
π − α
b
sin α = sin(π − α)
Angles de même sinus
TS1 Systèmes Photoniques – 2017 / 2018 13 Lycée Fresnel - Paris

9 – Formulaire
Formule fondamentalePour tout α ∈ R :
cos2 α + sin2 α = 1
Formules d’additionPour tout a et b ∈ R :
cos(a + b) = cos a cos b − sin a sin b sin(a + b) = sin a cos b + cos a sin b
cos(a − b) = cos a cos b + sin a sin b sin(a − b) = sin a cos b − cos a sin b
Formules de duplicationPour tout α ∈ R :
cos(2α) =
cos2 α − sin2 α
2 cos2 α − 1
1 − 2 sin2 α
sin(2α) = 2 sin α cos α
Formules de linéarisationPour tout α ∈ R :
cos2 α =1 + cos(2α)
2sin2 α =
1 − cos(2α)
2
Formules de développementPour tout a, b ∈ R :
cos a cos b = 12 (cos(a + b) + cos(a − b))
sin a sin b = 12 (cos(a + b)− cos(a − b))
sin a cos b = 12 (sin(a + b) + sin(a − b))
Formules de factorisationPour tout α ∈ R :
1 + cos α = 2 cos2(α
2
)1 − cos α = 2 sin2
(α
2
)
Pour tout p, q ∈ R :
cos p + cos q = 2 cos(
p + q
2
)cos
(p − q
2
)
cos p − cos q = −2 sin(
p + q
2
)sin
(p − q
2
)
sin p + sin q = 2 sin(
p + q
2
)cos
(p − q
2
)
sin p − sin q = 2 cos(
p + q
2
)sin
(p − q
2
)
TS1 Systèmes Photoniques – 2017 / 2018 14 Lycée Fresnel - Paris
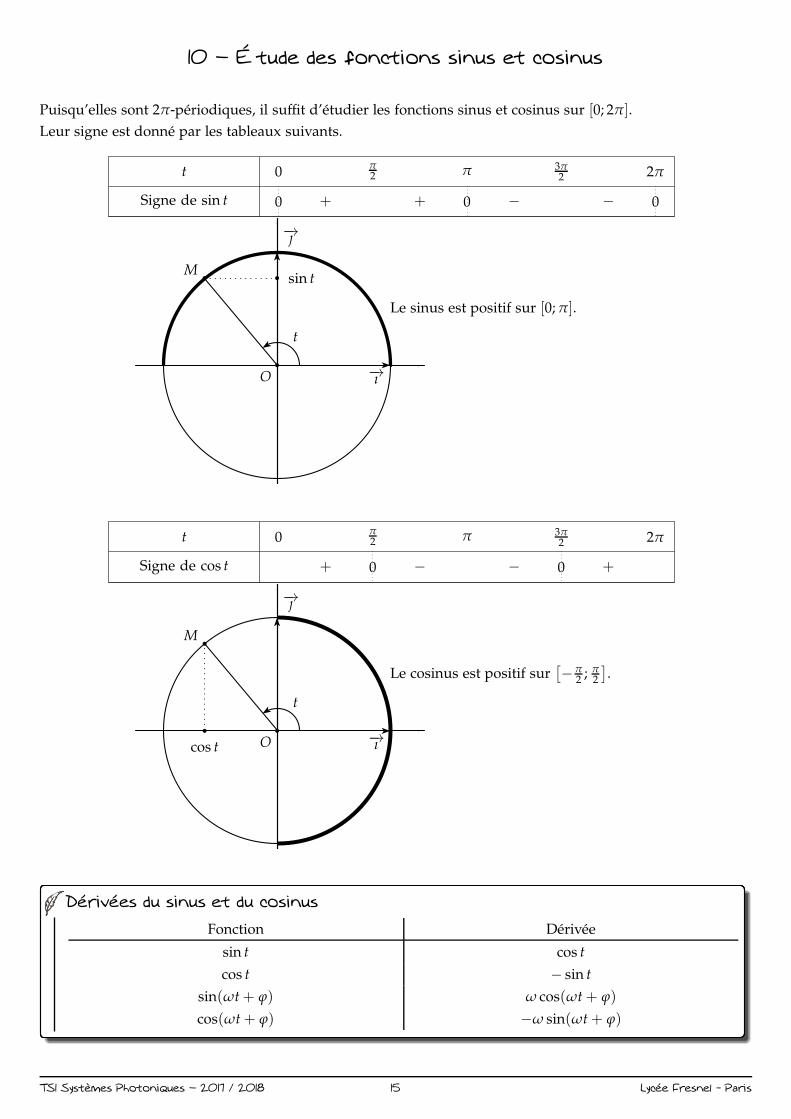
10 – Étude des fonctions sinus et cosinus
Puisqu’elles sont 2π-périodiques, il suffit d’étudier les fonctions sinus et cosinus sur [0; 2π].Leur signe est donné par les tableaux suivants.
t
Signe de sin t
0 π2 π 3π
2 2π
0 + + 0 − − 0
b
O
bM
−→
−→ı
t
b sin t
Le sinus est positif sur [0; π].
t
Signe de cos t
0 π2 π 3π
2 2π
+ 0 − − 0 +
b
O
bM
−→
−→ı
t
Le cosinus est positif sur[−π
2 ; π2
].
b
cos t
Fonction Dérivée
sin t cos t
cos t − sin t
sin(ωt + ϕ) ω cos(ωt + ϕ)
cos(ωt + ϕ) −ω sin(ωt + ϕ)
Dérivées du sinus et du cosinus
TS1 Systèmes Photoniques – 2017 / 2018 15 Lycée Fresnel - Paris
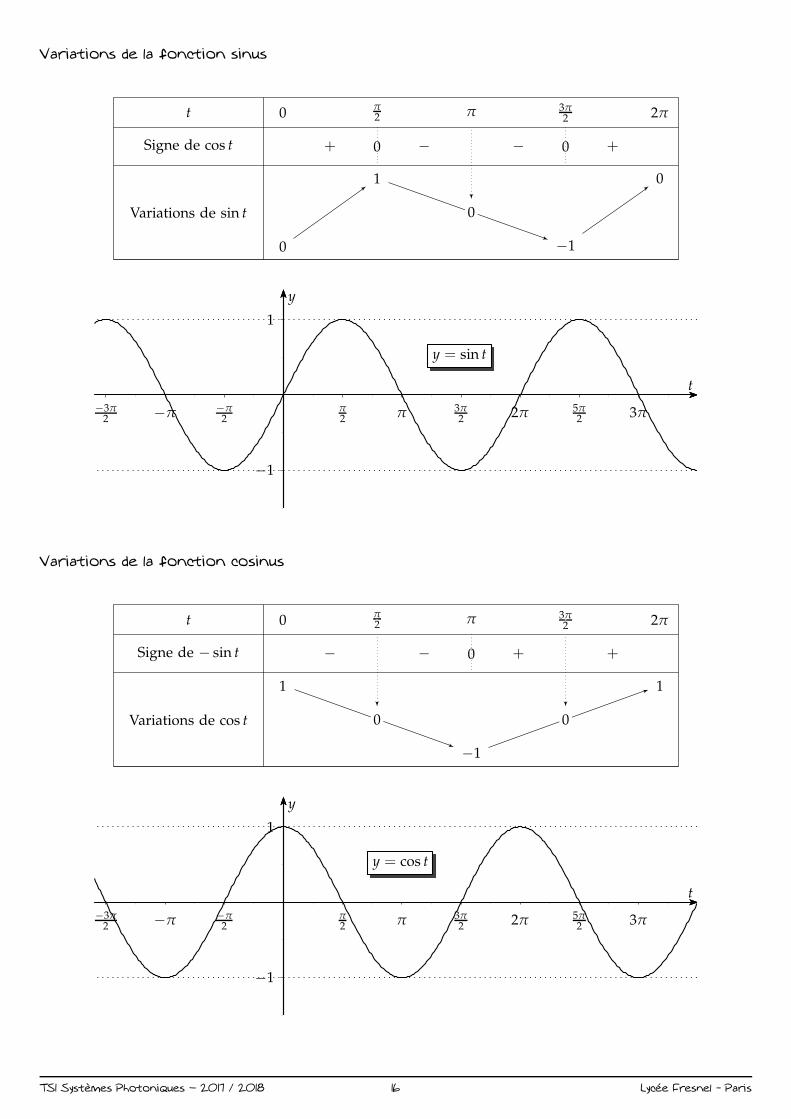
Variations de la fonction sinus
t
Signe de cos t
Variations de sin t
0 π2 π 3π
2 2π
+ 0 − − 0 +
00
11
−1−1
00
0
1
−1
π2 π 3π
2 2π 5π2 3π−π
2−π−3π2
t
y
y = sin t
Variations de la fonction cosinus
t
Signe de − sin t
Variations de cos t
0 π2 π 3π
2 2π
− − 0 + +
11
−1−1
11
0 0
1
−1
π2 π 3π
2 2π 5π2 3π−π
2−π−3π2
t
y
y = cos t
TS1 Systèmes Photoniques – 2017 / 2018 16 Lycée Fresnel - Paris
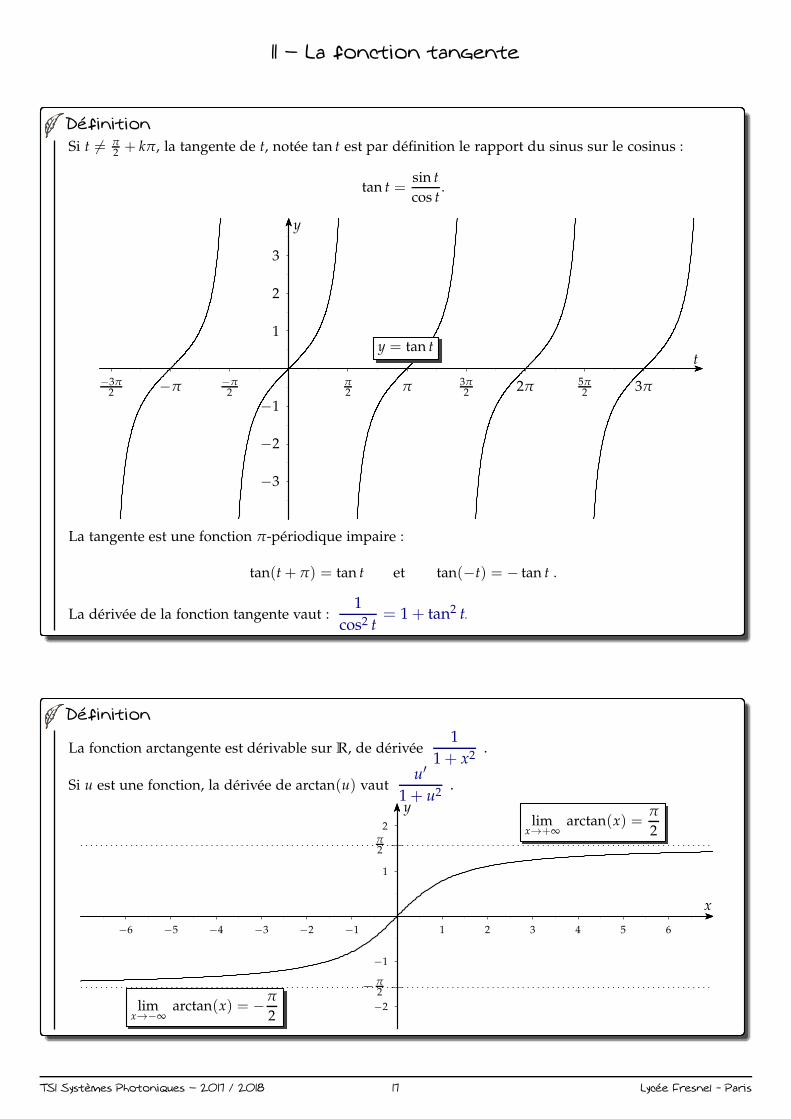
11 – La fonction tangente
Si t 6= π2 + kπ, la tangente de t, notée tan t est par définition le rapport du sinus sur le cosinus :
tan t =sin t
cos t.
1
2
3
−1
−2
−3
π2 π 3π
2 2π 5π2 3π−π
2−π−3π2
t
y
y = tan t
La tangente est une fonction π-périodique impaire :
tan(t + π) = tan t et tan(−t) = − tan t .
La dérivée de la fonction tangente vaut :1
cos2 t= 1 + tan2 t.
Définition
La fonction arctangente est dérivable sur R, de dérivée1
1 + x2 .
Si u est une fonction, la dérivée de arctan(u) vautu′
1 + u2 .
1
2
−1
−2
1 2 3 4 5 6−1−2−3−4−5−6
x
y
π2
−π2
limx→−∞
arctan(x) = −π
2
limx→+∞
arctan(x) =π
2
Définition
TS1 Systèmes Photoniques – 2017 / 2018 17 Lycée Fresnel - Paris
Exercices
Exercice 1
Effectuer les conversions ci-dessous.
30◦ = . . . . . . . . . radians 45◦ = . . . . . . . . . radians 120◦ = . . . . . . . . . radians
π
2radians = . . . . . . . . .◦
π
3radians = . . . . . . . . .◦
5π
6radians = . . . . . . . . .◦
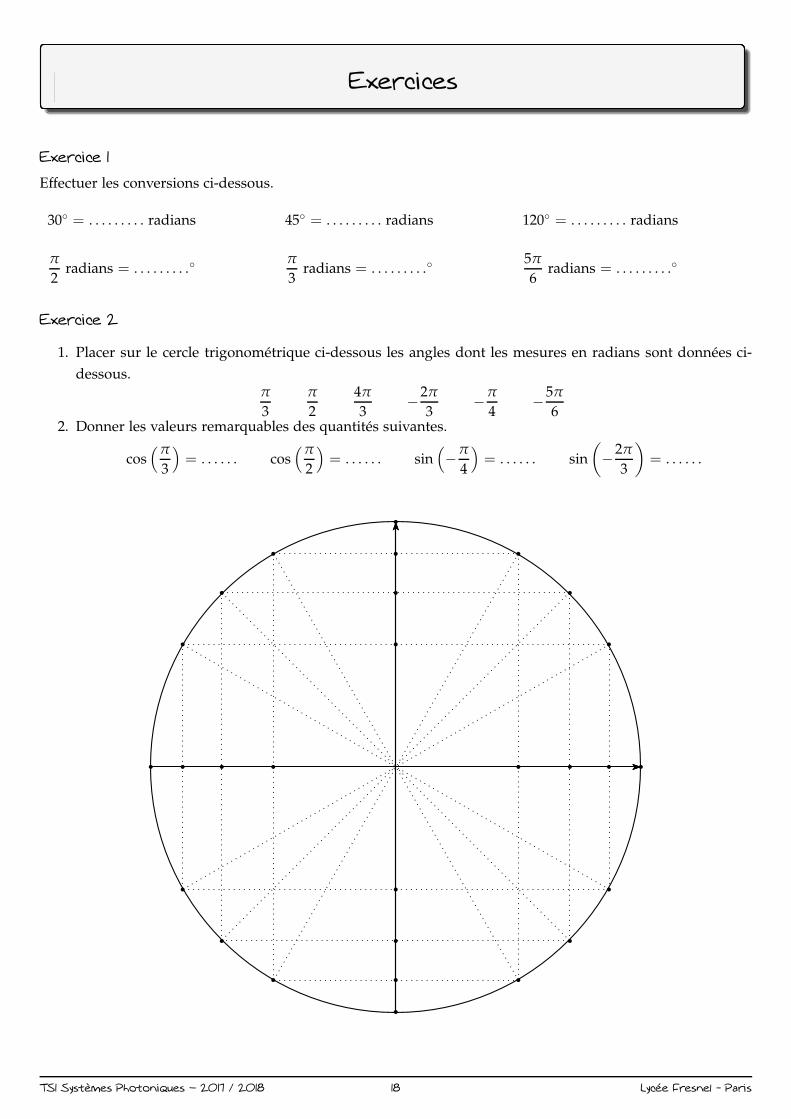
Exercice 2
1. Placer sur le cercle trigonométrique ci-dessous les angles dont les mesures en radians sont données ci-dessous.
π
3π
24π
3−2π
3−π
4−5π
62. Donner les valeurs remarquables des quantités suivantes.
cos(π
3
)= . . . . . . cos
(π
2
)= . . . . . . sin
(−π
4
)= . . . . . . sin
(−2π
3
)= . . . . . .
b
b
b
b
b
b
b
b
b bbbbbb
b
b
b
b
b
b
b
b
b
b b
b
b
TS1 Systèmes Photoniques – 2017 / 2018 18 Lycée Fresnel - Paris

Exercice 3
Donner la mesure principale des angles ci-dessous.
3π
27π
211π
27π
411π
415π
4−7π
6−11π
42017π
4
Exercice 4
Résoudre dans l’intervalle ]− π ; π] les équations ci-dessous.
a) cos(t) = −12
;
b) sin(t) = sin(π
5
);
c) sin(
t +π
2
)=
√3
2;
d) sin(2t) =
√2
2.
Exercice 5
Soit f la fonction définie pour tout nombre réel t par f (t) = cos(t) + sin(t).
1. Afficher la courbe représentantative de f à l’aide de la calculatrice.
2. Montrer que pour tout t ∈ R :
f (t) =√
2 sin(
t +π
4
)et f (t) =
√2 cos
(t − π
4
).
Exercice 6
Soit s la fonction définie sur [0; 2π] par : s(t) = sin(2t)− sin(
2t − π
2
)
1. Vérifier que pour tout nombre réel t supérieur ou égal àπ
4, on a :
s(t) =√
2 cos(
2t − π
4
).
2. Résoudre l’équation s(t) = 0 sur l’intervalle [0 ; 2π].
3. Étudier les variations de s sur l’intervalle [0 ; 2π].
Exercice 7
On considère la fonctions f définie sur [−π ; +π] par : f (t) = cos(2t)− 2 cos t.
1. Calculer f ′(t).
2. Montrer que : f ′(t) = −4 sin(
t
2
)cos
(3t
2
).
3. Étudier les variations de f sur l’intervalle [0 ; π].
Exercice 8
On considère la fonctions g définie sur [−π ; +π] par : g(t) = sin(2t)− 2 sin t.
1. Montrer que g′(t) = −4 sin(
t
2
)sin
(3t
2
).
2. Étudier les variations de f sur l’intervalle [0 ; π].
TS1 Systèmes Photoniques – 2017 / 2018 19 Lycée Fresnel - Paris






![WELCOME [d2jzxcrnybzkkt.cloudfront.net] · Rum/Cachaça Bacardi Carta Blanca 15/180 Maracatu Cachaça 17/210 Havana 3YO 15/180 Mount Gay Eclipse 15/180 Ron Zacapa 23 19/230 Prices](https://img.pdfslide.net/doc/110x75/5c0e385c09d3f258548cb0b4/welcome-rumcachaca-bacardi-carta-blanca-15180-maracatu-cachaca-17210.jpg)