Embed Size (px)
Citation preview

General relativistic simulations of slowly and differentially rotating magnetized neutron stars
Zachariah B. Etienne, Yuk Tung Liu, and Stuart L. Shapiro*Department of Physics, University of Illinois at Urbana-Champaign, Urbana, Illinois 61801, USA
(Received 8 June 2006; published 28 August 2006)
We present long-term (� 104M) axisymmetric simulations of differentially rotating, magnetizedneutron stars in the slow-rotation, weak magnetic field limit using a perturbative metric evolution tech-nique. Although this approach yields results comparable to those obtained via nonperturbative (BSSN)evolution techniques, simulations performed with the perturbative metric solver require about 1=4 thecomputational resources at a given resolution. This computational efficiency enables us to observe andanalyze the effects of magnetic braking and the magnetorotational instability (MRI) at very highresolution. Our simulations demonstrate that (1) MRI is not observed unless the fastest-growing modewavelength is resolved by * 10 gridpoints; (2) as resolution is improved, the MRI growth rate converges,but due to the small-scale turbulent nature of MRI, the maximum growth amplitude increases, but does notexhibit convergence, even at the highest resolution; and (3) independent of resolution, magnetic brakingdrives the star toward uniform rotation as energy is sapped from differential rotation by winding magneticfields.
DOI: 10.1103/PhysRevD.74.044030 PACS numbers: 04.25.Dm, 04.40.Dg, 97.60.Jd
I. INTRODUCTION AND MOTIVATION
In differentially rotating neutron stars, an initially weakmagnetic field will be amplified by processes such asmagnetic braking and the magnetorotational instability(MRI) [1,2], causing a redistribution of angular momen-tum. Such differentially rotating stars may arise from themerger of binary neutron stars [3–5], or from collapse ofmassive stellar cores, even if the cores spin uniformly at theoutset [6] (see also [7]).
To better understand how magnetic braking affects dif-ferentially rotating configurations, Shapiro performed apurely Newtonian, magnetohydrodynamic (MHD) calcu-lation [8] in which the star is idealized as a differentiallyrotating, infinite cylinder of homogeneous, incompressible,perfectly conducting gas (see also [9]). The magnetic fieldis taken to be radial initially and is allowed to evolve ac-cording to the ideal MHD (flux-freezing) equations. Thiscalculation demonstrates that differential rotation gener-ates a toroidal magnetic field, which reacts back on thefluid flow. Without viscous dissipation, the toroidal fieldenergy and rotational kinetic energy in differential motionundergo periodic exchange and oscillations on the Alfventime scale. The magnitude of these oscillations, and themaximum field strength, are independent of the initialmagnetic field strength; only the growth and oscillationtime scale depend on the magnitude of the seed field. Ifviscosity is present, or if some of the Alfven waves areallowed to propagate out of the star and into an ambientplasma atmosphere, the oscillations are damped, drivingthe star to uniform rotation.
Cook, Shapiro, and Stephens [10] later generalizedShapiro’s calculations for compressible stars. In their
model, the star is idealized as a differentially rotating,infinite cylinder supported by a polytropic equation ofstate. They performed Newtonian MHD simulations fordifferentially rotating stars with various polytropic indicesand different initial values of T=jWj, where T is the rota-tional kinetic energy and W is the gravitational potentialenergy. They found that when T=jWj is below the upper(mass-shedding) limit for uniform rotation, �max, magneticbraking results in oscillations of the induced toroidal fieldsand angular velocities, and the star pulsates stably.However, when T=jWj exceeds �max, their calculationssuggest that the core contracts significantly and shockwaves are generated, while the outer layers are ejected tolarge radii to form a wind or an ambient disk.
Liu and Shapiro [11] carried out both Newtonian andgeneral relativistic MHD (GRMHD) simulations on slowlyand differentially rotating incompressible stars. They con-sidered the situation in which T �M� jWj, where Mis the magnetic energy. Because of the assumptions of slowrotation and weak magnetic field, the star is well approxi-mated as a sphere. They found that toroidal fields aregenerated by magnetic braking, and the toroidal fieldsand angular velocities oscillate independently along eachpoloidal field line. The incoherent oscillations on differentfield lines stir up turbulentlike motion on tens of Alfventime scales, a phenomenon called phase mixing (see [12]and references therein). In the presence of viscosity, thestars eventually are driven to uniform rotation, with theenergy contained in the initial differential rotation goinginto heat.
Most recently, Duez et al. [13,14] and Shibata et al. [15]performed GRMHD simulations on rapidly, differentiallyrotating magnetized neutron stars in axisymmetry usingtwo, newly developed GRMHD codes [16,17]. They foundthat if a star is hypermassive (i.e. the star’s mass is largerthan the maximum mass of a uniformly rotating star),
*Also at the Department of Astronomy and NCSA, Universityof Illinois at Urbana-Champaign, Urbana, Illinois 61801, USA.
PHYSICAL REVIEW D 74, 044030 (2006)
1550-7998=2006=74(4)=044030(17) 044030-1 © 2006 The American Physical Society

magnetic braking and MRI will eventually induce collapseto a rotating black hole surrounded by a hot, massive toruswith a collimated magnetic field aligned along the spinaxis. This system provides a promising central engine forshort-duration gamma ray bursts [15]. They found thebehavior of nonhypermassive, differentially rotating neu-tron stars to be quite different. If a star initially spins at arate exceeding the limit for uniform rotation (‘‘ultraspin-ning’’ case), then instead of collapsing, such a star settles toan equilibrium state consisting of a nearly uniformly rotat-ing core surrounded by a differentially rotating torus.Although this torus maintains differential rotation, theangular velocity is constant along the magnetic field lines,so further magnetic braking will not occur. However,if a magnetized star initially exhibits rapid, differentialrotation at a spin below the limit for uniform rotation(‘‘normal’’ case), the star settles into a uniformly rotatingconfiguration.
The purpose of this paper is to study the same magneticeffects examined by Duez et al. [13,14], but in the slowrotation, weak magnetic field limit (i.e., M� T � jWj).Analyzing the behavior of stars with such weak, but as-trophysically realistic, magnetic fields on the magneticbraking (Alfven) time scale requires simulations spanning�104M for the models we consider. Thus the primarychallenge of this work is its exorbitant computationalexpense. To overcome this difficulty, we adopt a perturba-tive metric approach similar to the one developed by Hartle[18,19], valid to first order in the angular velocity �. Thesecond computational challenge is to resolve the wave-length of the dominant MRI mode, which is small for theweak initial fields we wish to treat (�MRI / B). Solving themetric equations via perturbation theory allows us to adoptsufficiently high spatial resolution to track MRI.
Two aspects of our perturbative approach make simula-tions significantly less costly than a nonperturbative, met-ric evolution at a given resolution and ultimately allow usto perform simulations at roughly 1=4 the total computa-tional cost. First, the perturbed metric is time independentexcept for the �-component of the shift, ��, which givesrise to frame-dragging. The shift �� varies with � on theAlfven time scale, equivalent to many thousands of(Courant) time steps in a typical simulation. Our perturba-tive metric solver uses a simple, ordinary differential equa-tion (ODE) solver to compute the shift and allows us toskip many time steps between matter evolution updates.Second, nonperturbative metric schemes incorporate ap-proximate asymptotic outer boundary conditions, whichcause problems if the outer boundary is moved too closeto the star. The perturbed metric on the other hand dependsonly on quantities defined within the (spherical) star, so theouter boundary of the MHD evolution grid may be movedsignificantly closer to the stellar radius with significantreduction in computational expense.
The validity of our slow-rotation perturbative code istested to �2 Alfven time scales (� 104M). We evolve a
star with both the perturbative and the nonperturbativeBaumgarte-Shapiro-Shibata-Nakamura (BSSN) [20]gravitational field scheme, and compare the results. Wevalidate our simulations self-consistently by checking thatthe evolution data satisfy the slow rotation, weak magneticfield assumptions.
We study resolution-dependent MRI effects using twotechniques. First, we vary the grid spacing � at fixed initialmagnetic field strength, and second, we vary the initialmagnetic field strength ( / �MRI) at fixed �. We observeMRI-driven rapid growth of the poloidal fields when�MRI=� * 10 (consistent with [13,14]) and convergencein the growth rate if �MRI=� * 25. However, con-vergence in the maximum amplitude of these fields is notachieved even when �MRI is resolved to � 41 points. Thisis due to small-scale turbulence intrinsic to MRI and toaxisymmetry.
In addition to an analysis of MRI, we also study mag-netic braking. Our simulations indicate that the winding ofmagnetic fields due to magnetic braking saps a consider-able fraction of the energy associated with differentialrotation in roughly one Alfven time scale tA, regardlessof resolution or metric evolution technique. Once the ro-tation profile becomes more uniform, the magnetic fieldsbegin to unwind, pumping differential rotation energy backinto the star.
In the above simulations, we choose a differentiallyrotating star with an angular velocity profile that initiallydecreases with increasing distance from the rotation axis.In our final simulation, we evolve a differentially rotatingstar possessing an angular velocity profile that initiallyincreases with distance from the rotation axis. Magneticbraking should occur in both models, but MRI should notoccur in the later case [2,21]. Our code yields the expectedresult.
The remainder of this paper is structured as follows. InSec. II, magnetic winding and MRI are explained qualita-tively. Section III presents the mathematical and numericalframework for our simulations. Section IV outlines ourinitial data and numerical input parameters, Sec. V ana-lyzes the validity of our perturbative metric solver, Sec. VIdiscusses our simulation results, and Sec. VII summarizesour conclusions. We adopt geometrized units in whichG �c � 1.
II. QUALITATIVE OVERVIEW
A. Magnetic braking
In an infinitely conducting plasma (MHD limit), mag-netic field lines are ‘‘frozen-in’’ to the fluid elements theyconnect. We evolve differentially rotating stars in this limitwith initially purely poloidal magnetic fields. Differentialrotation causes the magnetic fields to wind toroidally onthe Alfven time scale [8,22]
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-2

tA �RvA� 80 s
�B
1012 G
��1�
R15 km
��1=2
�M
1:4 M�
�1=2;
(1)
where B is the magnetic field strength, vA � B=����������4��p
�
B���������������R3=3M
pis the Alfven speed, and R and M are the radius
and mass of the star, respectively. As shown in [13], in theearly stage of the magnetic braking, the toroidal magneticfield B� increases linearly with time according to
BT�t;$; z� $B� � t$Bi�0;$; z�@i��0;$; z�
�i � $; z�; (2)
where � � v� is the angular velocity, vi � ui=ut is the
matter three-velocity, and $ �����������������x2 y2
pis the cylindrical
radius. The coordinates are set up so that the rotation axis isalong the z-direction.
The increase of BT with time adds energy to the mag-netic fields and saps the energy available in differentialrotation TDR, conserving total angular momentum. Afterroughly one Alfven time tA, TDR is exhausted [8,10,11] andBT reaches a maximum, so eventually the growth of BT
must deviate from the linear relation (2). Although tAdepends on the initial magnetic field amplitude, the ampli-tude at which the field saturates does not [8].
B. MRI
MRI-induced turbulence occurs in a weakly magnetized,gravitating body if the angular velocity decreases withincreasing distance from the rotation axis [2,21].According to a local, linearized perturbation analysis inthe Newtonian limit [2,13,21], this instability causes thepoloidal field magnitude to increase exponentially with ane-folding time �MRI independent of the seed field strengthbefore saturating:
�MRI � �2�@�
@ ln$
��1: (3)
The wavelength of the fastest-growing mode, �MRI, isgiven by
�MRI �8�������������������������
16�4 � �4p vA; (4)
where
� �1
$3
dd$�$4�2� (5)
is the epicyclic frequency of Newtonian theory. For a starwith @ ln�=@ ln$��1, we have �MRI � 2=�� Pc,where Pc is the central rotation time scale, and �MRI �2�vA=�.
For configurations we consider, �MRI=R � 1=6, where Ris the stellar radius. Therefore resolution on the order ofR=�� 20 (where � is the grid spacing) is necessary toresolve the fastest-growing MRI wave mode �MRI.
However, the onset of MRI results in a buildup of small-scale MHD turbulence, so the actual resolution require-ments for fine-scale MRI modelling are much higher.
C. Upper bound on magnetic energy
The magnetic energy M in a magnetized star under-going magnetic braking increases as differential rotation isdestroyed. In the slow-rotation limit, the gravitational po-tential energy W and internal energy U of the star do notchange significantly, so the maximum possible value of Mfor such a star, Mmax, is given by
Mmax � TDR; (6)
where TDR is the kinetic energy associated with differentialrotation. Note that TDR may be estimated at t � 0 byconstructing a rigidly rotating star with the same totalangular momentum J as the differentially rotating starand computing the difference in kinetic energy betweenthe two configurations. Equation (6) therefore provides usa way to estimate the maximum allowed magnetic energy apriori.
III. BASIC EQUATIONS AND NUMERICALTECHNIQUE
In this section, we describe two methods to evolve themetric: the perturbative approach and the nonperturbativeBSSN scheme. The perturbative approach (Sec. III A)takes advantage of the fact that the system is nearly spheri-cally symmetric. With this scheme, the evolution of themetric can be simplified considerably. The nonperturbativemetric evolution approach (Sec. III B) is the same as thatused in [16]. The Maxwell and GRMHD equations arediscussed in Sec. III C. They are evolved with the samehigh-resolution shock-capturing technique as in [16].
A. Perturbative metric evolution scheme
For a slowly rotating, quasistationary axisymmetric star,the rest-mass density �0 and pressureP differ from those ofa spherical star to second order in rotation frequency �.Further, if the stress-energy tensor satisfies the circularityconditions (see Eqs. (23) and (B3)), we can choose acoordinate system so that the only off diagonal componentof the metric is the frame-dragging term gt�. In thisapproximation, the line element may be written to firstorder in rotation frequency � and magnetic field strengthjBj as
ds2 � �e��r�dt2 e��r�dr2 � 2!�t; r; �r2sin2dtd�
r2�sin2d�2 d2�; (7)
where r is the areal radius. Thus full determination of themetric requires expressions for e��r�, e��r�, and !�t; r; � �����t; r; �. The first two quantities comprise the time-independent components of metric, computed once for all
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-3

time using the initial spherical P and �0. However, ! is adynamical quantity that depends on the rotation profile ofthe star. It must therefore be recomputed as the star evolvesin a quasistationary fashion.
As stated before, the metric (7) is valid only if the stress-energy tensor satisfies the circularity conditions. To sim-plify our calculation, we also require that the azimuthalmomentum energy density associated with the electromag-netic field be small compared with those associated withthe fluid. These conditions are satisfied if (1) the meri-dional components of the fluid’s velocity are much smallerthan the rotational velocity, and (2) the energy density ofthe poloidal magnetic fields is much smaller than theenergy density of the fluid. Table I summarizes theseconditions, which are derived in Appendix B.
1. Computing the time-independent metric components
For small �, the equilibrium star is spherical (the de-viation from sphericity is of order �2), and the metriccomponents e��r� and e��r� are independent of time (toorder �). They can be computed by solving theOppenheimer-Volkoff (OV) equations [23]:
dm�r�dr
� 4�r2��r�; (8)
dP�r�dr
� ����r� P�r���m�r� 4�r3P�r��
r�r� 2m�r��; (9)
e��r� � �1� 2m�r�=r��1; (10)
d��r�dr
�2�m�r� 4�r3P�r��
r�r� 2m�r��; (11)
with boundary conditions
�0�0� � �c � constant; (12)
m�0� � 0; (13)
limr!1
��r� � 0: (14)
We close the above set of equations via a polytropicequation of state:
P � K��0 ; � � 1 1=n; (15)
whereK is the polytropic constant, � is the adiabatic index,and n is the polytropic index. Note that � is related to �0 by� � �0�1 � where � P=���� 1��0� is the specificinternal energy. In our perturbative scheme, ��r� andm�r� are frozen to their initial values and are not evolvedwith time. Note that outside the star, the diagonal metriccomponents describe the Schwarzschild spacetime, withmass m�r > R� � M.
2. The time-dependent shift term !�t; r;��
What remains is to compute the time-dependent quantity!�t; r; � � ����t; r; �. Given the slow-rotation assump-tions summarized in Table I, the momentum constraintequation in the Arnowitt-Deser-Misner (ADM) formalism(Eq. 24 in [24]) yields the following partial differentialequation for!�t; r; � (see Appendix A for further details):
1
r4
@@r
�r4j�r�
@!@r
� e�����=2 1
r2sin3
@@
�sin3
@!@
�
4
rj0�r�! �
4
rj0�r��; (16)
where j�r� � expf����r� ��r��=2g and j0�r� �dj�r�=dr.
Following [19], we solve Eq. (16) by expanding ! and� in terms of associated Legendre polynomials:
!�t; r; � �X1l�1
P0l�cos�!l�t; r�; (17)
��t; r; � �X1l�1
P0l�cos��l�t; r�: (18)
Because of the assumption of equatorial symmetry (inaddition to axisymmetry), all even terms in the aboveexpansions vanish. Substituting Eqs. (17) and (18) into
TABLE I. Assumptions made in the slow-rotation approximation (see Appendix B for a derivation).
Orthonormal Component Velocity [max. average]a Magnetic Field [max. average]a
� v� � �r sin�B��2
4��0h& 1 �6 10�5�
��������v
�r
��������� 1 [0.03]�B�2
4��0h� 1 �4 10�7�
r��������v
r
�r
��������� 1 [0.04]�Br�2
4��0h� 1 �3 10�7�
aThe above nondimensional ratios are local in space in time, so we compute a mass density-weighted average of these quantities atvarious times. We denote the maximum value (in time) observed in our simulations ‘‘max. average.’’
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-4

Eq. (16), we obtain the same radial equation for each l as Hartle (Eq. (30) of [19]):
1
r4
ddr
�r4j�r�
d!l
dr
�
�4
rdjdr� e�����=2 l�l 1� � 2
r2
�!l �
4
rdjdr
�l; (19)
where �l�r > R� � 0. Our analysis of this equation in the limits r! 0 and r! 1 (see Appendix A) yields the followingboundary conditions
!l�t; r�jr!0 �
8>><>>:
�1�t; 0� A1�t�; if l � 1A3�t�r2 � 16�
21 �4��0� 3P�0���3�t; 0�r2 lnr; if l � 3
Al�t�rl�1 16��4��0�3P�0���l�t;0�r2
3�l�l1��12� ; otherwise:(20)
!l�t; r�jr!1 � Cl�t�r�l�2; (21)
where Cl�t� and Al�t� are determined (using the shootingmethod) at a given time t by matching the interior (r < R)and exterior (r > R) solutions at the stellar surface r �R�:
!l�t; R� � !l�t; R��; (22)
ddr!l�t; r�jR �
ddr!l�t; r�jR� : (23)
For the models we consider in this paper, we find thatcontributions from modes above l � 5 are negligible, sowe only calculate modes up to and including l � 5.
B. BSSN metric evolution scheme
The line element for a generic spacetime is written in thestandard 3 1 form as follows:
ds2 � ��2dt2 �ij�dxi �idt��dxj �jdt�; (24)
where � is the lapse, �i is the shift, and �ij is the three-dimensional spatial metric. We evolve the metric �ij andthe extrinsic curvature Kij using the BSSN formalism [20].The BSSN evolution variables are:
� � 112 ln�det��ij��; (25)
~� ij � e�4��ij; (26)
K � �ijKij; (27)
~A ij � e�4��Kij �13�ijK�; (28)
~� i � �~�ij;j: (29)
The equations for evolving these variables are given in
[20]. For the gauges, we use the hyperbolic driver condi-tions [25,26] to evolve the lapse and shift.
We adopt the Cartoon method [27] to impose axisym-metry and use a Cartesian grid. In this scheme, the coor-dinate x is identified with the cylindrical radius $, they-direction corresponds to the azimuthal direction, and zlies along the rotation axis. For example, for any 3-vectorVi, Vx V$, and Vy $V’.
C. Maxwell and MHD equations
In terms of the Faraday tensor F �, the MHD conditionis given by
F �u� � E �u� � 0; (30)
where E �u� is the electric field measured by an observer
comoving with the fluid. As in [13], we evolve the follow-ing set of variables:
�? � ������p
�0u0; (31)
~� � �2 �����p
T00 � �?; (32)
~S i � ������p
T0i ; (33)
~B i ������p
Bi; (34)
where � � det��ij�, B � 12
���F��n denotes themagnetic field measured by a normal observer, and n isthe unit normal vector orthogonal to the time slice. Thesevariables satisfy the following evolution equations:
@tUr � F � S; where (35)
@tU � @t
�?~�~Si~Bi
26664
37775; (36)
r � F � @j
�?vj
�2 �����p
T0j � �?vj
������p
Tjivj ~Bi � vi ~Bj
26664
37775; and (37)
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-5

S �
0�
�����p��T00�i�j 2T0i�j Tij�Kij � �T00�i T0i�@i��
12�
�����p
T��g��;i0
26664
37775: (38)
The stress-energy tensor T � for a magnetized, infinitelyconducting, perfect fluid is given by
T � � ��0h b2�u u�
�P
b2
2
�g � � b b�: (39)
Here, h � 1 P=�0 is the specific enthalpy, and�������4�p
b � B �u� is the magnetic field measured by an ob-
server comoving with the fluid, which is related to B by
�������4�p
b � �P �B�n�u�
� B �u�; (40)
where P � � g � u u�.We evolve Eq. (35) using a high-resolution shock-
capturing scheme as in [16]. Specifically, we use the piece-wise parabolic method (PPM) [28] algorithm for datareconstruction and the Harten-Lax-Van Leer (HLL) fluxformula [29] for the approximate Riemann solver.
D. Diagnostics
During the simulations, we monitor the following con-served quantities: rest mass M0, angular momentum J. Wealso monitor the ADM massM, which is nearly conserved,as the energy emitted as gravitational radiation is negli-gible. We also compute the rotational kinetic energy T,magnetic energy M, internal energy U, and gravitationalpotential energy W. All of these global quantities arecalculated using the formulae given in [13].
IV. INITIAL DATA AND NUMERICALPARAMETERS
To understand the behavior of slowly rotating, weaklymagnetized neutron stars, we perform four studies. First, inour ‘‘MRI Resolution Study,’’ we start with a differentiallyrotating, poloidally magnetized configuration in which theangular velocity decreases away from the rotation axis. Wethen evolve this star at various resolutions, with the goal ofuncovering the detailed, resolution-dependent behavior ofMRI. In our second study, the ‘‘B Variation Study,’’ weevolve the same star as in the first study at lowest resolu-tion, varying only the strength of the initial poloidal fields.This study also examines the resolution-dependent natureof the observed MRI by varying B and hence �MRI at fixedspatial resolution. Finally, in the ‘‘Rotation Profile Study,’’we evolve the same star as with our ‘‘MRI ResolutionStudy,’’ changing the angular velocity distribution so thatit initially increases with distance from the rotation axis. Inthis study, we expect to observe magnetic winding, but notMRI (out to �1tA). As a code test, we also perform the‘‘Rigid Rotation Profile Study,’’ where we explore the sameconfiguration as with the first study, only with solid bodyrotation at the same total angular momentum J. We expectthat the magnetic field will not change in time and have noeffect on the star. Tables II and III present a summary ofinitial parameters for the stars we consider in these studies.
For simulations using the BSSN metric solver, we con-struct initial data for a differentially rotating, relativisticstar in equilibrium using the code of Cook et al. [30] withthe following rotation law:
u0u� � AR2��c ���; (41)
TABLE II. Initial models: Magnetic field-related parameters.
Study Ca htAi=Mb htAi=�
M1:4 M�
� htAi=Pc �jBjt�0max�=�
1:4 M�M �c �M=jWj�d T=jWje
Rigid Rotation Profile 6:1 10�5 4800 33 ms 10.2 4:9 1014 G 4:4 10�6 4:55 10�3
MRI Resolution 6:1 10�5 4800 33 ms 17.9 4:9 1014 G 4:4 10�6 4:85 10�3
B Variation 4:97 10�6 16 200 112 ms 61.1 1:4 1014 G 3:8 10�7 4:85 10�3
1:96 10�5 8100 56 ms 30.7 2:8 1014 G 1:5 10�6 4:85 10�3
6:1 10�5 4800 33 ms 17.9 4:9 1014 G 4:4 10�6 4:85 10�3
Rotation Profile 6:1 10�5 4800 33 ms 7.2 4:9 1014 G 4:4 10�6 4:90 10�3
aC is the maximum value of b2=P at t � 0.bhtAi is the mass density-weighted Alfven time, given by Eq. (44).cjBjt�0
max is the maximum magnitude of the magnetic field at t � 0.dM=jWj is the initial ratio of magnetic energy to gravitational potential energy.eT=jWj is the initial ratio of kinetic energy to gravitational potential energy.
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-6

where R is the equatorial coordinate radius, �c is thecentral angular velocity, and A is a constant parameterwhich determines the degree of differential rotation. Inthe Newtonian limit, this rotation law reduces to the so-called ‘‘j-constant’’ law:
� ��c
1 $2
AR2
: (42)
For a slowly rotating star, the spatial metric �ij is nearlyconformally flat ~�ij � fflat
ij . The Cook et al. code usesspherical isotropic coordinates, so to obtain the desired~�ij, we only need to transform the Cook et al. initial datato Cartesian coordinates.
For simulations with the perturbative metric solver, weset up the initial data by first computing the diagonalcomponents of the metric and the hydrodynamic quantitiesby solving the OV Eqs. (8)–(11). Then the shift �� iscomputed via the perturbative technique described inSec. III A, with the angular velocity distribution computedby either solving Eq. (41) in the slow-rotation limit (theRotation Profile Study), or using the solution of Eq. (41) ascomputed by the Cook et al. code (MRI Resolution Studyand B Variation Study). Note that since the initial datacomputed by the perturbative technique is only accurate toorder �, the resulting star will undergo small amplitudeoscillations [due to O��2� effects]. Further, to more easilycompare perturbative simulation results with those using
the BSSN scheme, we perform the coordinate transforma-tions necessary to facilitate evolution of the Maxwell andMHD equations in the same Cartesian coordinates as in theBSSN evolution scheme.
In our MRI Resolution and B Variation studies, weconsider an A � 1 differentially rotating star which satis-fies the n � 1 polytropic equation of state (EOS). Otherparameters are set so that the equilibrium star possesses thefollowing properties: the ratio of equatorial to polar radiiRp=R � 0:98, central rotation period Pc � 2�=�c �
264:7M, compactness M=R � 0:182, ratio of angularvelocity at the equator to that at the center �eq=�c �
0:3, and T=jWj � 4:88 10�3. The mass of this star isdetermined by the polytropic constant K, which we set tounity. However, our results can be easily rescaled to anyvalues of K (see [30]), and hence to any values of themass. For example, the model we just described hasR � 9:2�M=1:4 M�� km, �c � 1:54 1015�1:4 M�=M�
2 g=cm3, and Pc � 1:8�M=1:4 M�� ms.The Rotation Profile Study involves the same star as in
the MRI Resolution Study, but with rotation profile pa-rameters set so that A � �1, which corresponds to��R�=�c � 2:8.
Next, we add a small seed magnetic field to the stellarmodels above by specifying the vector potential Ai �
A���i as
A� � $2 max�Ab�P� Pcut�; 0�; (43)
TABLE III. Initial models: Parameters related to resolution and numerical evolution.
Study Method �R=��a C h�MRIi=� (tstop=Pc)b
Rigid Rotation Profile Perturbative 100 6:1 10�5 � � � 10.2 (ns)
MRI Resolution Perturbative 75 6:1 10�5 12.2 35.8 (ns)100 16.3 15.5150 24.4 13.1200 32.6 13.3250 40.7 12.3
Nonperturbative 75 6:1 10�5 12.2 35.8 (ns)100 16.3
B Variation Perturbative 75 4:97 10�6 3.6 61.1 (ns)1:96 10�5 7.2 30.7 (ns)6:1 10�5 12.2 17.9 (ns)
Nonperturbative 75 4:97 10�6 3.6 61.1 (ns)1:96 10�5 7.2 30.7 (ns)6:1 10�5 12.2 17.9 (ns)
Rotation Profile Perturbative 100 6:1 10�5 � � � 7.2 (ns)
aR is the equatorial coordinate radius of the star, and � is the grid spacing.btstop is the time at which the simulation was stopped due to loss of accuracy, which happens soon after the magnetic field hits the outerboundary. (ns) indicates that the magnetic fields have not hit the outer boundary at 2htAi, and the simulation was terminated at theindicated time.
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-7

where the pressure cutoff Pcut is set to 4% of the maximumpressure (Pcut � 0:04Pmax). The strength of the initial seedfield is determined by the constant Ab and may be charac-terized by the parameter C, the maximum value of b2=P att � 0.
The strength of the magnetic field can also be measuredby the mass density-averaged Alfven time htAi defined as
htAi �hvAiR
��1�
�1
RM0
ZvA��d
3x��1; (44)
where vA �������������������������������b2=��0h b
2�p
is the Alfven speed. Since�MRI is a local quantity, we define the magnetic energydensity-weighted average of �MRI as follows:
h�MRIi
R~�MRIb
2 �����p
d3xRb2 ����
�p
d3x; (45)
where
~�MRI�r� ���MRI�r� if 0< �MRI�r�< tA0 otherwise
: (46)
Here �MRI and �MRI are calculated by Eqs. (3) and (4),respectively. The cutoff in Eq. (46) is set so that we onlyconsider the region where the MRI is present (�MRI > 0)and where the MRI time scale is less than the Alfven time(where �MRI > tA, magnetic braking is expected todominate).
All our nonperturbative simulations are performed on asquare grid with outer boundary at 2:0R ( � 11M). Ourperturbative simulations on the other hand use an outerboundary of 1:2R, with metric updates every 8–10 timesteps. We have verified that if the outer boundary is set to1:5R instead, all quantities we studied are the same towithin �1% until the magnetic field hits the 1:2R outerboundary. Because of this loss of accuracy, we stop oursimulations soon after this boundary crossing. The time atwhich each simulation was stopped, tstop, is listed inTable III. By �2tA, both magnetic winding and MRI arefully developed.
We specify resolution by the quantity R=�, where R isthe stellar radius and � is the grid spacing. Thus a simu-lation with 1502 points and outer boundary at 2R hasR=� � 75, and a simulation with 902 points and outerboundary at 1:2R has R=� � 75 as well. In these simula-tions, MRI does not become evident until t � 6Pc (e.g., seeFig. 4). Thus for computational efficiency in our highestresolution run,R=� � 250, we evolve the star at resolutionR=� � 100 until t � 5Pc and then regrid to R=� � 250.Table III summarizes the resolutions chosen in oursimulations.
V. CODE TESTS
A. Test of the perturbative shift solver
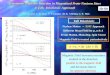
To verify that our perturbative shift solver produces theshift �� accurately to order �, we compute �� for differ-entially rotating, equilibrium star models and compare theresults with those computed without approximation by theCook et al. code [30]. Figure 1 shows the error, ���, forthree models with the same central density (�c � 1:54 1015�1:4 M�=M�2 g=cm3) but with various T=jWj. We seethat ��� decreases as �2 / T=jWj, as expected. Thisshows that our perturbative shift solver accurately calcu-lates �� to first order in �.
B. Rigid rotation profile study
When the star is uniformly rotating, a (weak) poloidalmagnetic field should not change with time and it shouldhave no effect on the star. To test our code, we evolve auniformly rotating star with the physical parameters speci-fied in Tables II and III (Rigid Rotation Profile Study). Wefollow the star for one Alfven time (htAi � 10:2Pc �4800M). Figure 2 displays snapshots of the poloidal mag-netic field in time, and Fig. 3 shows the evolution of therotational profile on the equatorial plane. As expected,neither the star’s rotation profile nor its magnetic fieldchange significantly over the Alfven time scale.
FIG. 1 (color online). Relative error in �� along the equatorialplane of the star at t � 0. Exact solutions from Cook et al. code[30] are compared to perturbative shift solver results at T=jWj �2:43 10�3 (solid lines), 4:9 10�3 (dashed lines), and 9:9 10�3 (dotted lines). Here ��� ���Cook � �
�Pert�=���
�Cook
��Pert�=2�. To demonstrate the approximate scaling ��� /T=jWj, we have multiplied the value of ��� a factor of 4 forthe case T=jWj � 2:43 10�3, and by a factor of 2 for the caseT=jWj � 4:9 10�3.
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-8

VI. NUMERICAL RESULTS
A. MRI resolution study
In the MRI Resolution Study, we perform simulations ona magnetized differentially rotating star (see Table III) atresolutions R=� � 75, 100, 150, 200, and 250. The initialmagnetic field is set so that C � 6:1 10�5. To demon-strate that the two metric solvers yield the same results, wealso perform simulations with the BSSN metric solver atthe two lowest resolutions (R=� � 75 and 100). Figure 4displays the maximum magnitude of jBxj as a function oftime. MRI causes the sudden increase of jBxjmax at t �6Pc. As resolution is increased, jBxjmax saturates at largervalues. Because of the turbulent nature of the MRI, we donot achieve convergence, even at the highest resolutions
(R=� � 200 and 250). However the exponential growthtime of the MRI, �MRI, does converge at the highest reso-lutions (R=� � 150! 250). The numerically determinedvalue for �MRI is �5:0Pc, which does not significantlydeviate from the linearized, Newtonian theory estimate(obtained by applying Eq. (3) at t � 0) of �MRI;min�5:7Pc. We see that regardless of resolution or metric evo-lution scheme, the MRI-induced amplification of the mag-netic field above its initial value becomes evident byt � 6Pc.
Figure 5 plots the maximum value of jByj as a functionof time. The straight lines in each plot indicate the ex-pected growth rate via magnetic braking in the linearregime, according to Eq. (2). Notice that at early time,jByjmax agrees well with the expected linear growth.However, the slope begins to flatten once the magneticfield becomes strong enough to induce fluid backreaction.Later, the slope of jByjmax increases once again beforeflattening at the point of saturation. As resolution is im-proved, the saturation point in jByjmax occurs at earliertime. We find that the sudden increase in the slope corre-lates well with the increase of jByjmax in the MRI plotof Fig. 4. We also find that at the same time, the regionat which jByjmax occurs shifts to the region where theMRI occurs. This is further evidence that the suddenincrease in jByjmax results from MRI-induced magneticfield rearrangement.
To further explore magnetic field rearrangement in ourstar at different resolutions, Fig. 6 provides snapshots ofpoloidal magnetic field lines (i.e., contours of the vectorpotential A�) at various times. Notice that MRI induces thelargest distortion of the field lines in the outer equatorialregion of the star. This is consistent with the linear analy-sis: Eq. (3), together with the star’s angular velocity profile,gives a shorter �MRI near the outer part of the star. Similarbehavior has been observed in simulations of magnetized,rapidly, and differentially rotating stars [13,14]. The dis-
FIG. 3 (color online). Snapshots of the rotation profile at theequatorial plane at t=htAi � 0 and 1.0 for the uniformly rotatingstar.
FIG. 2. Snapshots of the poloidal magnetic field lines (contours of A�) at t=htAi � 0, 0.5, and 1.0 for the uniformly rotating star. Thefield lines are drawn for A� � A�;min �A�;max � A�;min�i=20, (i � 1–19), where A�;max and A�;min are the maximum and minimumvalues of A�, respectively, at the given time. The dashed line in each plot indicates the initial stellar surface.
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-9

tortion becomes more prominent at finer resolution, whichsuggests that more and more small-scale MRI modes arebeing resolved as resolution is improved.
Next we analyze how the rotation profile of the starchanges as a result of its magnetic field. Figure 7 showsthe equatorial rotation profile at various times. Consistentwith the results of [8], we find that magnetic windingdestroys the differential rotation profile on the Alfventime scale, causing the star to rotate nearly as a solidbody with � � �const at t � 1htAi. Here �const is theangular velocity of a uniformly rotating star with thesame rest mass and angular momentum as the star understudy. When the toroidal field saturates around t � 1htAi,the magnetic fields begin to unwind, eventually causing therotation profile to increase with increasing radius atroughly 2htAi. In addition, the MRI stirs up a turbulentlikeflow, causing the bumpy rotation profile seen at later times.
As the magnetic fields are wound, the magnetic energyM saps kinetic energy T associated with differential rota-tion (Fig. 8) until the star rotates nearly as a solid body. Atthis point, we find that the star’s kinetic energy sinks to itsminimum value shortly after M reaches maximum. Notethat, consistent with Fig. 4, the maximum of M occursearlier and earlier as resolution is improved due to aninterplay between MRI and magnetic braking. After Mreaches maximum, the fields unwind, pumping energyback into differential rotation, as shown at lowest resolu-tions in Fig. 8. We speculate, based on the �-disk model[21] and on our previous work [8,10,11,14], that the oscil-lations of T and M will continue for many Alfven timesuntil the rotational kinetic energy associated with differ-ential rotation is dissipated by phase mixing caused byMRI-induced turbulence. However, since the star is slowlyrotating (T=jWj � 4:88 10�3) with weak magnetic
FIG. 5 (color online). Evolution of jByjmax�t�. Simulations with resolution R=� � 75, 100, 150, and 250 are shown with solid,dotted, short dashed, and long dashed lines, respectively, with perturbative results on the left and nonperturbative (BSSN) on the right.The dash-dotted line represents the expected early-time linear growth of jByjmax, as predicted by Eq. (2).
FIG. 4. jBxjmax vs time, with perturbative results plotted on the left and nonperturbative (BSSN) on the right. Resolutions of R=� �75, 100, 150, 200, and 250 are shown with solid, dotted, short dashed, long dashed, and long dash-dotted lines, respectively. The shortdash-dotted line represents an approximate slope � � 1=�5:0Pc� for the exponential growth rate of the MRI, �Bx / e�t. Note thathtAi=Pc � 17:9.
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-10

fields (M� T), the Alfven time is long, htAi � 10:2Pc �4800M. It is therefore computationally taxing to accuratelyevolve the star for many Alfven times, even if the pertur-bative metric solver is used.
As discussed in Sec. IV, perturbative metric solver initialdata are only accurate to order �. This causes oscillationsto arise in our perturbative T data at the level of �T �0:0065, where �T � �T � T�0��=T�0� is the fractional
FIG. 7 (color online). Rotation profile � measured in the equatorial plane at various times, comparing perturbative scheme (left)with nonperturbative (right) at R=� � 75 resolution. The straight line indicates the solid body angular frequency �const of a star withthe same angular momentum J and rest mass M0.
FIG. 6. Snapshots of poloidal magnetic field lines at various times, with resolution R=� � 75 (top), 150, (middle), and 250 (bottom).The field lines are drawn for A� � A�;min �A�;max � A�;min�i=20, (i � 1–19), where A�;max and A�;min are the maximum andminimum values of A�, respectively, at the given time. The dashed line in each plot indicates the initial stellar surface.
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-11

deviation of the rotational kinetic energy from its initialvalue. The oscillations are evident in raw Fig. 8 perturba-tive data. A simple, local (in time) averaging technique isused to smooth out these oscillations in Fig. 8. Althoughthey are smaller by an order of magnitude, we remove theoscillations in our perturbative M data as well, for con-sistency. Notice also in Fig. 8 that the value of Mmax iscomparable to that derived in Eq. (6).
Figure 9 demonstrates that the angular momentum J inour long-term simulations is well-conserved out to 2htAi.
We see that angular momentum is lost at nearly a constantrate in our perturbative simulations, but the loss decreaseswith increasing resolution. In addition to angular momen-tum conservation, the binding energy M0 �MADM is con-served to within � 0:5% in perturbative and � 2:5% inBSSN simulations.
B. B variation study
In this study, the grid resolution is fixed at R=� � 75,and only the strength of the initial magnetic field is varied.We perform both perturbative and BSSN simulations. TheMRI wavelengths in these simulation are h�MRIi=� � 3:6,7.2, and 12.2. The corresponding magnetic field strengthparameters are given in Table II. Note that the last case isthe same as the lowest resolution case in the MRIResolution Study.
In Fig. 10, we plot jBx�t�jmax for the three magnetic fieldstrengths. Although h�MRIi depends on initial magneticfield strength (Eq. (46)) , the MRI e-folding time scale�MRI does not (see, e.g. Eq. (3)). MRI is observed onlywhen h�MRIi=� * 12, which is consistent with the resultsof [13,14].
C. Rotation profile study
In this study, we consider a differentially rotating star inwhich � increases with cylindrical radius. We expect tosee magnetic braking but not MRI in simulations of thisstar.
Figure 11 presents the same plots as those in Figs. 4–7for this star. The top left plot indicates that, as expected,MRI is absent from this simulation. Although magneticbraking does appear (top right) as predicted, the curve isnearly parabolic and does not exhibit a sudden increase inslope as observed in Fig. 5. This further supports the notionthat the sudden increase in slope in Fig. 5 results from an
FIG. 9 (color online). Relative change in angular momentum J(�J � �J� J�0��=J�0�) vs time at resolutions R=� � 75 (solidline), 150 (dashed line), and 250 (dotted line). Recall that theR=� � 250 data is from a regridding run, where the data beforet=htAi � 0:3 is at R=� � 100, and 250 after. This explains thevarying slope in the R=� � 250 data. We plot results from theperturbative scheme only; the nonperturbative technique con-serves J to the same degree.
FIG. 8 (color online). Rotational kinetic (T) and magnetic (M) energies vs time. For a given energy E, we define �E � �E�t� �E�0��=T�0�. The left plot compares results from the perturbative (solid line) and BSSN (dashed line) metric algorithms at R=� � 75out to t � 2htAi, and the right plot shows the same at R=� � 100 (perturbative: dotted line, BSSN: dashed line) and 250 (perturbativeonly: solid line). The rotational kinetic energy of rigid body rotation for the given J is plotted at the bottom of each graph. The data forthe perturbative runs have been smoothed to remove unphysical oscillations (see the text for details).
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-12

FIG. 11 (color online). Results from the Rotation Profile Study. The plots from top left to bottom are analogues to Figs. 4–7. Top left:jBxjmax vs time, top right: jByjmax vs time, middle three plots: magnetic field lines (contours of A�), bottom: equatorial rotation profile.
FIG. 10. jBxjmax vs time, with different initial magnetic field strengths, so that h�MRIi=� � 4:0 (bottom line), 8.0 (middle line), and12.2 (top line). Resolution is fixed at R=� � 75. Data from the perturbative spacetime evolution method are shown in the left plot, andBSSN method in the right.
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-13

interplay between magnetic braking and MRI. Note alsothat the MRI-induced magnetic field distortion does notappear in the poloidal plane (middle three plots). Finally,we see that since the magnetic field-shifting effects of MRIare absent and the magnetic field is initially confined to thehigh density inner region of the star (Fig. 5), magneticbraking is incapable of flattening the rotation profile (bot-tom plot) in the less dense outer layers of the star.
VII. CONCLUSIONS
Our perturbative metric evolution algorithm yields re-sults quite similar to those produced by the nonperturba-tive, BSSN-based evolution scheme. Because the outerboundary may be moved inward and the metric updatedon a physically relevant time scale, perturbative metricsimulations may be performed at �1=4 the computationalcost of BSSN metric simulations in axisymmetry forslowly rotating, weakly magnetized equilibrium stars.However, we found that loss of accuracy did occur aftermagnetic fields hit the outer boundary. This problem couldbe efficiently solved in future work by extending the outerboundary further from the star.
The stars we study in this paper are weaklymagnetized (M=jWj � 10�6) and slowly rotating(T=jWj � 0:005). As a result, the Alfven time scale isvery long (� 5000M), and accurate simulations spanningmany Alfven times would be prohibitively expensive. Inthis paper, we reliably evolved such stars out to two Alfventimes at moderate resolution (R=� � 75). In these simu-lations, we found that magnetic fields wind and unwind onthe Alfven time scale, resulting in a trade-off between thekinetic energy in differential rotation and magnetic energy.Since we could not perform simulations spanning manyAlfven time scales while accurately resolving MRI, we canonly speculate, based on the�-disk model and our previouswork [8,10,11,14], that the oscillations between the mag-netic and kinetic energy will be damped by MRI-induceddissipative processes over many Alfven times.
In order to observe MRI in our simulations, we find thatthe spatial resolution must be set so that �MRI=� * 10, inagreement with the results of [13,14]. We have also verifiedthat MRI is not present if the star’s angular velocity ini-tially increases with increasing distance from the rotationaxis (i.e., the MRI is absent when @$�> 0).
We find that as resolution is increased, the effects ofMRI become more and more prominent. Because of theturbulent nature of MRI, we do not achieve convergence offield amplitude, even if �MRI=� � 32:6 or 40.7. However,we found the e-folding time of MRI, �MRI does converge.The numerically determined value, �MRI � 5:0Pc is con-sistent with the value predicted by the linearized, localNewtonian analysis (5:72Pc). The small difference is duein part to the fact that our star is relativistic. In addition, thelinearized analysis assumes that �MRI is much smaller thanthe length scale on which the magnetic field changes (i.e.
�MRI � B=jrBj), which is not quite satisfied in our mag-netic field configuration.
Finally, we note that the behavior of the MRI is expectedto be different in a full 3D calculation because of the effectof nonaxisymmetric MRI induced by a toroidal magneticfield. Turbulence may arise and persist more readily in 3Ddue to the lack of symmetry. More specifically, accordingto the axisymmetric antidynamo theorem [31,32], sus-tained growth of the magnetic field energy is not possiblethrough axisymmetric turbulence. Thus proper treatmentof MRI in differentially rotating neutron stars requireshigh-resolution simulations performed in full 3 1 dimen-sions. The computational cost of such simulations withexisting 3 1 metric evolution schemes has thus farbeen prohibitive, but with our perturbative metric solverit may be possible to perform 3 1 simulations of weaklybut realistically magnetized, slowly rotating stars at a smallfraction of the computational cost.
ACKNOWLEDGMENTS
We gratefully acknowledge useful conversations withC. Gammie, M. Shibata, and B. Stephens. Computationspresented here were performed at the National Center forSupercomputing Applications at the University of Illinoisat Urbana-Champaign (UIUC) and on a UIUC Departmentof Physics Beowulf cluster with 26 Intel Xeon processors,each running at 2.4 GHz. This work was in part supportedby NSF Grants No. PHY-0205155 and No. PHY-0345151,and NASA Grant No. NNG04GK54G.
APPENDIX A: DERIVATION OF SHIFT EQUATION(EQ. (16))
Here we derive the equation for the shift (Eq. (16)),starting from the usual momentum constraint equation inthe 3 1 ADM decomposition of Einstein’s field equa-tions. Recall from Eq. (7) the perturbative line element isgiven by
ds2 � �e��r�dt2 e��r�dr2 2���t; r; �r2sin2dtd�
r2�sin2d�2 d2� O��2� O�B2�: (A1)
We begin by writing the momentum constraint equation(Eq. 24 in [24])
DjKji �DiK � 8�ji; (A2)
where K � Kjj and ji � ��
bincT
cb. It can easily be
shown from the ADM 3-metric evolution equation(Eq. 35 in [24]) @t�ij � �2e�=2Kij L��ij that in thisapproximation Kij is given by
0 � @t�ij � �2e�=2Kij �ijj �jji; (A3)
where �ijj denotes the spatial covariant derivative Dj�i,and the first equality reflects the stationarity of the 3-metricin this approximation. Taking the trace of this equation and
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-14

applying the identity �jjj �
1����p �
�����p
�j�;j (where � �
det�ij) yields an expression for K:
� 2e�=2K 2�����p �
�����p
�j�;j � 0: (A4)
Note that ������p
�j�;j � ������p
���;� � 0 by axisymmetry, soEq. (A2) may be rewritten
Kjijj � 8�ji: (A5)
It follows from the definition of ji and the metric (A1) thatji � e�=2T0
i. We split the stress-energy tensor T �, as wellas ji, into a fluid part and an electromagnetic part:
T � � TF � TEM
� ; (A6)
TF � �0hu u� Pg �; (A7)
TEM � b2u u�
b2
2g � � b b�; (A8)
jFi � e�=2TF0
i; jEMi � e�=2TEM0
i: (A9)
Our approximation as summarized in Table I and derived inAppendix B ensures that jF
� is the dominant component ofji. In this approximation, vi � �0; 0;�� and
j� � �ohe��=2�� ���r2sin2: (A10)
Thus i � � remains the only nonzero component ofEq. (A5) to first order in � and B:
Kj�jj � 8��ohe��=2�� ���r2sin2: (A11)
Next we expand our expression for Kj�jj:
Kj�jj �
1�����p �
�����p
Kj��;j � �k�mK
mk (A12)
�1�����p �
�����p
r2sin2Kj��;j � �k�mKml�kl: (A13)
It follows from Eq. (A3) and the identity �ijj � �i;j
�ijk�k that
2e�=2Kij � ��i;l �ilk�k��jl ��j;l �jlk�
k��il:
(A14)
After computing the necessary Christoffel symbols, wefind that the nonvanishing components of Kij are:
Kr� � K�r �1
2e�=2�e����;r�; (A15)
K� � K� �1
2e�=2
���;r2
�: (A16)
Plugging these expressions into Eqs. (A13) and then (A11)yields the equation governing the shift:
1
r4 �r4j�r�!;r�;r e
�����=2 1
r2sin3�sin3!;�;
4
rj0�r�!
�4
rj0�r��; (A17)
where ! � ��� and j�r� � e�����r���r��=2�.Finally, we perform the angular decompositions as in
Eqs. (17) and (18) and substitute them into Eq. (A17) toobtain the equation
1
r4 �r4j�r�!0l�r��
0
�4j0�r�r� e�����=2 l�l 1� � 2
r2
�!l�r�
� 4j0�r�r
�l�r�: (A18)
This equation is the same as Eq. (30) in [19], which wasderived using a different approach. Each !l must alsosatisfy the boundary conditions at the origin and at infinity(see below), as well as the matching conditions [Eqs. (22)and (23)] at the surface of the star.
1. Boundary condition at the origin
We now determine the boundary condition at the originby analyzing the terms of Eq. (A18) in the r! 0 limit.
First we analyze j�r� and its derivatives, starting withj0�0� � � 1
2 j�0���0�0� �0�0��. From the OV equations,
we obtain
�0�0� �2�rm0�r� �m�r��
�r� 2m�r��2
��������r!0� 0; (A19)
�0�0� �2�m�r� 4�r3P�r��
r�r� 2m�r��
��������r!0� 0; (A20)
where we have used the expression m�r� � �4=3��r3��0�as r! 0. Thus j0�0� � 0 since j�r� � e������=2� is regularat r � 0. Next we examine j0�r�=r:
j0�r�=rjr!0 � j00�0� � �e������=2��00jr!0 (A21)
� �12j�0���
00�r� �00�r��jr!0 (A22)
� �1
2j�0�
ddr
�2�rm0�r� �m�r��
�r� 2m�r��2
2�m�r� 4�r3P�r��
r�r� 2m�r��
���������r!0(A23)
� �43�j�0��4��0� 3P�0��: (A24)
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-15

We may therefore write Eq. (A18) near r! 0 as follows
!00l �r� 4
r!0l�r� 4!l�r�
j00�0�j�0�
�l�l 1� � 2
r2 !l�r�
� 4�l�0�j00�0�j�0�
; (A25)
with the solution given by Eq. (20).
2. Boundary condition at infinity
Outside the star, P � � � 0 and the time-independent(diagonal) metric becomes Schwarzschild, so e� � e�� �1� 2M=r. The ODE governing the shift outside the star istherefore given by
1
r4�r4!0l�r��
0 �1
1� 2M=rl�l 1� � 2
r2 !l�r� � 0:
(A26)
Since 2M=r� 1 in the limit r! 1, we may writeEq. (A18) as
1
r4
ddr
�r4 d!l
dr
��l�l 1� � 2
r2 !l � 0 (A27)
with the solution given by Eq. (21).Note that the analytic solution for Eq. (A26) exists and is
given in terms of the hypergeometric function:
!l �
�C1
r3 ; if l� 1; andClrl2F1�l 2; l� 1; 2l 2; 2M=r�; otherwise:
(A28)
3. Rigid rotation case
In the case of solid body rotation (��r; � � constant),only the l � 1 mode in Eq. (19) contributes to �. Thus theright-hand side of Eq. (A18) is zero for l > 1. For l > 1, thesolution !l � 0 satisfies the boundary conditions at theorigin and at infinity [Eqs. (20) and (21)] and the matchingconditions at the stars’s surface [Eqs. (22) and (23)], so!l � 0 is the solution for l > 1. This coincides with theresult cited in [18].
APPENDIX B: DERIVATION OF SLOW-ROTATIONAPPROXIMATION INEQUALITIES
In this section, we derive inequalities that must hold inorder for our primary assumption in Appendix A [leadingto Eq. (A10)] to be valid.
We have assumed that the metric can be written in theform (7) at all times, with the shift �� � �! being theonly nondiagonal component of the metric. For this to betrue, the system has to be (approximately) stationary, axi-symmetric, and the stress-energy tensor has to be circularor nonconvective [33]:
�T������� � 0; (B1)
��T������� � 0; (B2)
where � @=@t and � � @=@� are two Killing vectorfields associated with stationarity and axisymmetry, re-spectively. These circularity conditions are satisfied if themomentum currents in the meridional planes are negligiblecompared with the axial component. Hence we require that
jj�j � jjrj and jj�j � jjj; (B3)
where the ‘‘hats’’ denote the orthonormal components.We split the stress-energy tensor into a fluid part and an
electromagnetic part: T � � T �F T �EM, where
T �F � �0hu u� Pg �; (B4)
T �EM � b2u u� b2
2g � � b b�: (B5)
From this we obtain the following expressions for T0iF and
T0iEM:
T0iF � �0hu
0ui � �0h�u0�2�ij�v
j �j� � �0he���ijv
j;
(B6)
T0iEM � b2u0ui � b0bi � e��
vj
4���ijB2 � BiBj�; (B7)
where we have used the fact that vj �j � vj and �u0 �
1O��2� for slowly rotating stars. Here the lapse � �e�=2.
Since ji � e�=2T0i, we may split the momentum current
density in the same way: ji � jFi j
EMi . Using the above
expression for T0Fi and the metric (7), we find
jFi � e�=2T0
iF )
8>>>><>>>>:
jF�� e��=2�0hr�
jF� �v
�r�jF�
jFr � e
��=2�vr
�r�jF�
: (B8)
In the absence of magnetic fields, ji � jFi and the condi-
tions (B3) yield jvj � j�jr and jvrj � j�jr [assuminge��=2 �O�1�]. Applying these inequalities, the electro-magnetic part of ji becomes
jEMi � e�=2T0
iEM
)
8>>>><>>>>:
jEM�� B2��B��2
4��0hjF�
jEM� B2
4��0h�v
�r �1��B�2
B2 � �BB�
B2 �jF�
jEMr � B2
4��0he��=2�v
r
�r �1� e�� �Br�2
B2 � �BrB�
B2 �jF�
:
(B9)
For simplicity, we have ignored the magnetic field terms
ETIENNE, LIU, AND SHAPIRO PHYSICAL REVIEW D 74, 044030 (2006)
044030-16

when computing the shift in Appendix A. For this to bevalid, we need to impose an additional condition:
jjF�j � jjEM
�j: (B10)
Equations (B8) and (B9) together with the conditions(B3) and (B10) yield the following inequalities which mustbe satisfied for the shift equations in Appendix A to bevalid:
��������vr
�r
��������� 1;��������v
�r
��������� 1;�Br�2
4��0h� 1;
�B�2
4��0h� 1; and
�B��2
4��0h& 1:
(B11)
For information on how well these inequalities are satisfiedin our simulations, see Table I.
[1] V. P. Velikhov, Sov. Phys. JETP 36, 995 (1959); S.Chandrasekhar, Proc. Natl. Acad. Sci. U.S.A. 46, 253(1960).
[2] S. A. Balbus and J. F. Hawley, Astrophys. J. 376, 214(1991).
[3] F. A. Rasio and S. L. Shapiro, Astrophys. J. 432, 242(1994); Classical Quantum Gravity 16, R1 (1999).
[4] T. W. Baumgarte, S. L. Shapiro, and M. Shibata,Astrophys. J. Lett. 528, L29 (2000).
[5] M. Shibata and K. Uryu, Phys. Rev. D 61, 064001 (2000);Prog. Theor. Phys. 107, 265 (2002); M. Shibata, K.Taniguchi, and K. Uryu, Phys. Rev. D 68, 084020(2003); M. Shibata and K. Taniguchi, Phys. Rev. D 73,064027 (2006).
[6] T. Zwerger and E. Muller, Astron. Astrophys. 320, 209(1997); M. Ruffert and H.-T. Janka, Astron. Astrophys.344, 573 (1999).
[7] Y. T. Liu and L. Lindblom, Mon. Not. R. Astron. Soc.324, 1063 (2001); Y. T. Liu, Phys. Rev. D 65, 124003(2002).
[8] S. L. Shapiro, Astrophys. J. 544, 397 (2000).[9] T. C. Mouschovias and E. V. Paleologou, Astrophys. J.
230, 204 (1979); 237, 877 (1980).[10] J. N. Cook, S. L. Shapiro, and B. C. Stephens, Astrophys.
J. 599, 1272 (2003).[11] Y. T. Liu and S. L. Shapiro, Phys. Rev. D 69, 044009
(2004).[12] H. C. Spruit, Astron. Astrophys. 349, 189 (1999).[13] M. D. Duez, Y. T. Liu, S. L. Shapiro, M. Shibata, and B. C.
Stephens, Phys. Rev. D 73, 104015 (2006).[14] M. D. Duez, Y. T. Liu, S. L. Shapiro, M. Shibata, and B. C.
Stephens, Phys. Rev. Lett. 96, 031101 (2006).[15] M. Shibata, M. D. Duez, Y. T. Liu, S. L. Shapiro, and B. C.
Stephens, Phys. Rev. Lett. 96, 031102 (2006).[16] M. D. Duez, Y. T. Liu, S. L. Shapiro, and B. C. Stephens,
Phys. Rev. D 72, 024028 (2005).[17] M. Shibata and Y.-I. Sekiguchi, Phys. Rev. D 72, 044014
(2005).[18] J. B. Hartle, Astrophys. J. 150, 1005 (1967).
[19] J. B. Hartle, Astrophys. J. 161, 111 (1970).[20] M. Shibata and T. Nakamura, Phys. Rev. D 52, 5428
(1995); T. W. Baumgarte and S. L. Shapiro, Phys. Rev. D59, 024007 (1998).
[21] S. A. Balbus and J. F. Hawley, Rev. Mod. Phys. 70, 1(1998).
[22] T. W. Baumgarte, S. L. Shapiro, and M. Shibata,Astrophys. J. Lett. 528, L29 (2000).
[23] J. R. Oppenheimer and G. Volkoff, Phys. Rev. 55, 374(1939).
[24] J. W. York, in Sources of Gravitational Radiation, editedby L. Smarr (Cambridge University Press, Cambridge,England, 1979).
[25] M. Alcubierre, B. Brugmann, D. Pollney, E. Seidel, and R.Takahashi, Phys. Rev. D 64, 061501(R) (2001).
[26] M. D. Duez, S. L. Shapiro, and H.-J. Yo, Phys. Rev. D 69,104016 (2004).
[27] M. Alcubierre, S. Brandt, B. Brugmann, D. Holz, E.Seidel, R. Takahashi, and J. Thornburg, Int. J. Mod.Phys. D 10, 273 (2001).
[28] P. Colella and P. R. Woodward, J. Comput. Phys. 54, 174(1984).
[29] A. Harten, P. D. Lax, and B. van Leer, SIAM Rev. 25, 35(1983).
[30] G. B. Cook, S. L. Shapiro, and S. A. Teukolsky, Astrophys.J. 398, 203 (1992).
[31] J. F. Hawley, C. F. Gammie, and S. A. Balbus, Astrophys.J. 440, 742 (1995); J. F. Hawley, Astrophys. J. 528, 462(2000).
[32] H. K. Moffatt, Magnetic Field Generation in ElectricallyConducting Fluids (Cambridge University Press,Cambridge, England, 1978).
[33] B. Carter, in Black Holes—Les Houches, 1972, edited byC. DeWitt and B. S. DeWitt (Gordon and Breach, NewYork, 1973); A. Papapetrou, Ann. Inst. Henri Poincare, A4, 83 (1966); B. Carter, J. Math. Phys. (N.Y.) 10, 70(1969); E. Gourgoulhon and S. Bonazzola, Phys. Rev. D48, 2635 (1993).
GENERAL RELATIVISTIC SIMULATIONS OF SLOWLY . . . PHYSICAL REVIEW D 74, 044030 (2006)
044030-17




![NUMERICAL MODELS OF MAGNETIZED MOON-FORMING GIANT … · Finally, magnet-ized, differentially rotating disks are subject to the magetorotational instability (MRI) [8]. If the protolunar](https://img.pdfslide.net/doc/110x75/5f463fd943f4db279226561c/numerical-models-of-magnetized-moon-forming-giant-finally-magnet-ized-differentially.jpg)