Embed Size (px)
Citation preview

Geometry: Notes and Exercises
Sophie M. Fosson ∗
June 2, 2013
1 Week 1: vectors, products, and determinantsin R2 and R3
Notation
1. v is a vector;
2. vi is the ith component of v ;
3. vi is the ith vector of a sequence of vectors ; vi(j) is the jth componentof vector vi.
4. [v1,v2, . . . ,vn] = {λ1v1 + . . . λnvn, λ1, . . . , λn ∈ R} is the set of all thepossible linear combinations of the vectors v1, . . . ,vn. We call it the setgenerated by v1, . . . ,vn.
Reminder 1 Given v = (v1, . . . , vn),w = (w1, . . . , wn) ∈ Rn:
1. Scalar product: 〈v,w〉 = v ·w =∑ni=1 viwi.
2. Norm (or modulus): |v| = ‖v‖ =√v · v.
3. v and w are orthogonal if v ·w = 0.
Exercise 1 Given u = (1, 2, 1) and v = (−1, 0, 1/3), compute w = 2u −〈u,v〉(−9v). Are u and w orthogonal?
Solution
〈u,v〉 = 1 · (−1) + 2 · 0 + 1 · 1/3 = −2/3
2(1, 2, 1)− 2/3(9, 0,−3) = (8, 4, 0)
〈u,w〉 = 16⇒ not orthogonal
Exercise 2 Let u = (5, 1, 7, 2), v = (0, 1, 0,−4) and w = (0, 0, 0, 0) b vectorsin V4. Evaluate (a) 2u− 3v+w, (b) u+ 2v+w, (c)0u+ 0v+ 1765w, (d)(u+w)− (u + 3w).
∗In these notes, I collect some exercises that I propose during my classes for the course ofProf. Gatto and some further material. This document is not necessarily comprehensive ofmy classes, but follows their chronological order. I update it each week (or each two weeks).Certainly there will be many errors: any feedback from readers is welcome.
1

Solution(a)
2u− 3v + w = 2(5, 1, 7, 2)− 3(0, 1, 0,−4) + (0, 0, 0, 0)
= (10, 2, 14, 4)− (0, 3, 0,−12)
= (10,−1, 14, 16).
(1)
(b)
u + 2v + w = (5, 1, 7, 2) + 2(0, 1, 0,−4) + (0, 0, 0, 0)
= (5, 1, 7, 2) + (0, 2, 0,−8)
= (5, 3, 7,−6).
(2)
(c)
0u + 0v + 1765w = (0, 0, 0, 0) (3)
(d)
(u + w)− (u + 3w) = ((5, 1, 7, 2) + (0, 0, 0, 0))− ((5, 1, 7, 2)− 3(0, 0, 0, 0))
= (0, 0, 0, 0).(4)
Exercise 3 Are u = (1, 0, 0), v = (1/2, 1/2, 0) and w = (3, 1, 0) coplanar?
We can immediately see that the answer is yes, since all these vectors has null
component in the direction−→k , then they lie on the plane xy. However, let us
prove it using algebra, that is by computing the determinant of the three vectors.We know indeed that the vectors are coplanar if and only if their determinantis null.
u∧v∧w =
∣∣∣∣∣∣u1 u2 u3v1 v2 v3w1 w2 w3
∣∣∣∣∣∣ = u1
∣∣∣∣ v2 v3w2 w3
∣∣∣∣−u2 ∣∣∣∣ v1 v3w1 w3
∣∣∣∣+u3
∣∣∣∣ v1 v2w1 w2
∣∣∣∣and ∣∣∣∣ v1 v2
w1 w2
∣∣∣∣ = v1w2 − w1v2.
In our case
u ∧ v ∧w =
∣∣∣∣∣∣1 0 0
1/2 1/2 03 1 0
∣∣∣∣∣∣ = 1
∣∣∣∣ 1/2 01 0
∣∣∣∣ = 0
Other way: notice that w = 2u + 2v, that is w is a linear combination of uand w. This property again is equivalent to coplanarity.
In terms of dimensions, what does to be coplanar means? It means that u,v and w belong to a subspace of dimension 2 in R3. A plane in R3 is a subspaceof dimension 2. Can we find a basis for this subspace? We just need two vectorsbelonging to it that are linearly independent: for example, B = {u,v}.
2

Exercise 4 Given u = (−3,−1, 1) and v = (1, 1/3,−1/3) compute(a) u · v = 〈u,v〉(b) u× v
(c) u · u× (v − 1/3−→j )
Solution
(a) u · v = −3− 1/3− 1/3 = −11/3.(b) This is the vector product. We can compute it as a determinant:
u× v =
∣∣∣∣∣∣−→i−→j−→k
u1 u2 u3v1 v2 v3
∣∣∣∣∣∣(Notice that this is an abuse of notation: the entries of the first row are vectorsinstead of scalar values. However, we can ignore this and just compute thedeterminant as always.)
The result is (0, 0, 0). Then u and v are collinear. In fact, u = −3v.
(c) u · u= 11, v − 1/3−→j = (1, 0,−1/3), then 11 × (1, 0,−1/3) = ...? This
is wrong! Why? Because the vector product is a product between two vectors,not between a scalar and a vector. So it must have been noticed that u · u ×(v − 1/3
−→j ) = u · (u× (v − 1/3
−→j )), otherwise the expression is nonsense.
Notice that if I we use the bracket notation: 〈u,u×(v−1/3−→j )〉 all ambiguity
is resolved.Now, u×(v−1/3
−→j ) = u×(1, 0,−1/3) = (1/3, 0, 1) and finally 〈u, (1/3, 0, 1)〉 =
0.This solution is correct, but there is a more clever way to obtain it quickly
and with no computations: no matter which is the w, 〈u,u×w〉 = 0 as u×wis known to be orthogonal to u (and also to w).
Exercise 5 Let u = (0, 1, 1), v = (2, 0,−1), w = (4, 5, 8). Is it true that[u,v,w] = R3?
SolutionIt is clear that [u,v,w] ⊆ R3. Let us prove that R3 ⊆ [u,v,w]. Let r =(r1, r2, r3) any vector in R3. The elements of [u,v,w] have the form au + bv +cw = a(0, 1, 1) + b(2, 0,−1) + c(4, 5, 8) = (2b + 4c, a + 5c, a − b + 8c), wherea, b, c ∈ R. Given any r ∈ R3, can we write it as an element of [u,v,w]? Theanswer is yes because
r1 = 2b+ 4cr2 = a+ 5cr3 = a− b+ 8c
⇒
r1 = 2b+ 4cr2 = a+ 5cr2 − r3 = b− 3c
⇒
r1 − 2r2 + 2r3 = 7cr2 = a+ 5cr2 − r3 = b− 3c
from which it is clear that c can be expressed in function of r, then also aand finally also b. In other terms for nay r ∈ R3 we can write it as a linearcombination of u, v, and w. For example, (4, 8, 11) = 2u + 0v + w. Noticealso that the solution of the system is unique, then, given r there is exactly onelinear combination of u,v, and w that represents it.
3

2 Week 2: straight lines and planes in R3
Notation
1. Vector: u = (u1, . . . , uN ) ∈ RN .
2. Point: P = (p1, . . . , pN ) ∈ AN , where AN is the affine space modeledon RN . Sometimes in the exercises the notation P = (p1, . . . , pN ) ∈ RNoccurs, which sounds confusing (same notation for points and vectors!),but actually the context always makes clear whether a point or a vectoris meant.
3. Let u(1), . . . ,u(m) ∈ RN , m ≥ 1.
[u(1), . . . ,u(m)] = span(u(1), . . . ,u(m)) := {v ∈ RN : v = t1u(1) +
t2u(2) · · ·+ tmu(m), t1, . . . , tm ∈ R}.
4. Given two points P and Q, ~PQ = Q− P .
Reminder 2 (Straight Line) A straight line passing through a point P =(p1, . . . , pN ) ∈ AN and parallel to span(u), u = (u1, . . . , uN ) ∈ RN is the setlP,u = {P + tu, t ∈ R}. A line is determined also by a couple of points P0, P1:lP0,P1
= {P0 + t(P1 − P0)), t ∈ R}Cartesian Equation of a straight line in R2: a generic point of a line has
coordinates (x, y) = (p1, p2) + (u1, u2)t. Let us eliminate the parameter t: fromthe first component of the previous vector equation, we obtain t = x−p1
u1; by
substitution in the second component we have y = p2 + u2x−p1u1
. Notice that
this equality corresponds to det
(y − p2 x− p1u2 u1
)= 0.
What happens in RN , N > 2?Let us consider N = 3: from (x, y, z) = (p1, p2, p3) + (u1, u2, u3)t, by the
same procedure, we get two equations y = p2 + u2x−p1u1
and z = p3 + u3y−p2u2
.
The Cartesian expression of a straight line in R3 is a system between two lin-ear equations in x, y, z (in the next, we will notice that this corresponds to theintersection between two planes).
Reminder 3 (Plane) A plane passing through a point P ∈ RN and orientedaccording to span(u,v), u,v ∈ RN is the set πP,u,v = {P + λu + µv, λ, µ ∈R}. A plane is determined also by a triple of (non collinear) points P0, P1.P2:πP0,P1,P2
= {P0 + λ(P1 − P0)) + µ(P2 − P0), λ, µ ∈ R}.Cartesian Equation of a plane in R3: (x, y, z) = P +λu+µv ⇔ 〈(x, y, z)−
P0,u× v〉 = 0.
Exercise 6 Determine whether L1 and L2 are parallel or coincident:(a) L1 : (1, 2, 2) + t(3, 5, 7), L2 : (7, 12, 16) + t(6, 10, 14);(b) L1 : (3, 4, 2) + t(1, 0, 7), L2 : (6, 8, 4) + t(2, 0, 14).
Solution(a) First, L1 and L2 are parallel since (6, 10, 14) = 2(3, 5, 7). Then, if they in-tersect in a point, they turn out to be coincident. Let us solve the vector equa-tion: (1, 2, 2) + t1(3, 5, 7) = (7, 12, 16) + t2(6, 10, 14), that is, (−6,−10,−14) =
4

(t1 + 2t2)(3, 5, 7). Then if 2 = t1 + 2t2 we obtain a common point (for instance,t1 = 2 and t2 = 0). This is sufficient to state that L1 and L2 are coincident.(b) L1 and L2 are parallel, but not coincident, in fact:
(3, 4, 2) + t1(1, 0, 7) = 2(3, 4, 2) + 2t2(1, 0, 7)(3, 4, 2) + (2t2 − t1)(1, 0, 7) = 0
corresponds to 3 + 2t2 − t1 = 04 + 0 = 02 + 7(2t2 − t1) = 0
in which the second equality is false. Hence, the system has no solution and thelines do not intersect.
Exercise 7 Determine a vector equation of the line L passing through P1 andP2 and determine whether the point Q is on L:(a) P1 = (3, 5, 1), P2 = (2, 0, 7), Q = (0,−10, 19)(b) P1 = (2, 0, 5), P2 = (−1, 0, 0), Q = (4, 2, 3)(c) P1 = (4,−1, 5), P2 = (6, 2,−3), Q = (0, 1, 2).
SolutionA vector equation of the (unique) straight line passing through two points P1,
P2 is−−→OP1 + t
−−−→P1P2, Moreover, Q is on the line if Q =
−−→OP1 + t
−−−→P1P2 for some t.
(a) L : (3, 5, 1) + t(−1,−5, 6) and (3, 5, 1) + t(−1,−5, 6) = (0,−10, 19) for t = 3,hence Q lies on L;(b) L : (2, 0, 5) + t(3, 0, 5) and (2, 0, 5) + t(3, 0, 5) 6= (4, 2, 3) for any t ∈ R, henceQ is not on L;(c) L : (4,−1, 5)+ t(2, 3,−8) and (4,−1, 5)+ t(2, 3,−8) 6= (0, 1, 2) for any t ∈ R,hence Q is not on L.
Exercise 8 Determine whether the given lines intersect or are skew; if theyintersect, find the point of intersection.(a) L1 : (3, 5, 1) + t(1, 0, 2), L2 : (1, 2, 5) + t(4, 3, 2)(b) L1 : line through (2, 3, 3) and (6, 1, 7), L2 : line through (6, 2, 8) and (7, 2, 9).(c) L1 : (−2,−4, 3) + t(3, 5,−2), L2 : (5, 1, 3) + t(2, 0, 1)
Solution(a) First, L1 and L2 are not parallel since (1, 0, 2) and (4, 3, 2) are linearlyindependent (that is, there is no a ∈ R such that (1, 0, 2) = a(4, 3, 2)). To findthe possible point of intersection, we have to solve the vector equation:
(3, 5, 1) + t1(1, 0, 2) = (1, 2, 5) + t2(4, 3, 2).
Second component: t2 = 1. Third component: t1−t2 = 2. t1−4t2 = −2. Thereis no solution.
(b) L1 : (2, 3, 3) + t(2,−1, 2) and L2 : (6, 2, 8) + t(1, 0, 1). Then, Thevector equation (2, 3, 3) + t1(2,−1, 2) = (6, 2, 8) + t2(1, 0, 1) has no solution.(−2,−4, 3) + t1(3, 5,−2) = (5, 1, 3) + t2(2, 0, 1) has solution t1 = 1 and t2 = −2.
5

Exercise 9 Determine whether the following sets of points in R3 are collinear(that is, lie on the same straight line):(a) (2, 1, 4), (4, 4,−1), (6, 7,−6).(b) (1, 2, 3), (−4, 2, 1), (1, 1, 2).(c) (1, 2, 3), (5,−4, 7), (3,−1, 5).
SolutionWe can solve this exercise by writing the straight line passing through two pointsand then checking if the third point lies on the this line.(a) L : (2, 1, 4)+t(2, 3,−5) is the line passing through the first two points; fixingt = 2 we obtain the third point, then the three points are collinear.(b) L : (1, 2, 3) + t(−5, 0,−2); notice that y = 2 is constant in this line, then(1, 1, 2) cannot lie on L.(c) L : (1, 2, 3) + t(2,−3, 2); when t = 1, we obtain (3,−1, 5), hence the pointsare collinear and lie on L.
Exercise 10 Find the linear equation for the plane H that contains the point
Q = (4, 0, 7) and has the normal vector −→n = 4−→j −−→k .
SolutionLet us call P = (x, y, z) the generic point of H, then
−−→QP = (x− 4, y, z − 7) lies
on H. Furthermore,−−→QP = (x− 4, y, z− 7) is orthogonal to −→n = (0, 4,−1), that
is (x− 4, y, z − 7) · (0, 4− 1) = 0. Thus, the equation of H is
4y − z + 7 = 0.
Exercise 11 Find the vector equation for the plane containing P1 = (2, 1, 2),P2 = (3, 4, 2) and P3 = (1, 7, 2).
SolutionThe Cartesian equation is easily obtain from
−−−→P1P2 ×
−−−→P1P3 ·
−−→P1P = 0. For any
u,v,w ∈ R3, we have u× v ·w = u ∧ v ∧w.
−−−→P1P2 ×
−−−→P1P3 ·
−−→P1P = (1, 3, 0)× (−1, 6, 0) · (x− 2, y − 1, z − 2)
=
∣∣∣∣∣∣1 −1 x− 23 6 y − 20 0 z − 2
∣∣∣∣∣∣ = 6(z − 2)− 3(z − 2) = 0
Hence, the Cartesian equation is z = 2 (x, y can assume any real value!). Theplane is parallel to the x, y-plane. Now let us choose (at random) a triple of noncollinear points of z = 2, e.g., P1 = (1, 0, 2), P2 = (0, 1, 2) and P0 = (0, 0, 2): wecan write the parametric expression as πP0,P1,P2
: P0 + λ(P1 − P0)) + µ(P2 −P0), λ, µ ∈ R, that is πP0,P1,P2
: (0, 0, 2) + λ(1, 0, 0) + µ(0, 1, 0) = (λ, µ, 2).
6

Exercise 12 Determine whether the planes 2x+ y− z = 1 and 3x− 2y+ z = 4intersect in a line, if they do, find a vector equation for the line.
SolutionBy summing the equation, we obtain 5x− y = 5. Then we can write, e.g., y infunction of x and then z in function of x. One variable (x in our case) remainsfree: the system has solution and the planes intersect. The intersection mightbe a plane (if the planes coincide: this is not the case) or a line. The fact thatit is a line relies on the fact that there is one free variable, hence we can writethe equation in function of just one parameter t, which is the typical case forlines. Let x = t, then y = 5t−5, z = 2t+ 5t−5−1 = 7t−6 and the parametricequation of the line is
L : (0,−5,−6) + t(1, 5, 7).
Reminder 4 How to compute the distance between a point P and a plane π:if nπ is the normal to π and Q any point on π, the distance between P and πis equal to the component of the vector P −Q along the direction of nπ. Such acomponent is computed using the scalar product:
d(P, π) = 〈P −Q,nπ〉
where Q is any point of π(recall that nπ is a unit vector). If π : ax+by+cz+d =0, we know that nπ = 1√
a2+b2+c2(a, b, c)T , therefore we easily obtain
d(P, π) =|a(x− x0) + b(y − y0) + c(z − z0)|√
a2 + b2 + c2
where P = (x0, y0, z0) and Q = (x, y, z).
Reminder 5 How to compute the distance between a point P and a straightline l: given any Q ∈ l,
d(P, l) = 〈P −Q,nl〉
where nl is a unit vector orthogonal to l. Let Q + vt, t ∈ R be the parametricexpression for l. Then, we have that (v× (Q−P ))×v is parallel to nl. Hence,
we can write nl = (v×(Q−P ))×v|(v×(Q−P ))×v| .
Using the fact that 〈u× v,w〉 = 〈u,v ×w〉, we obtain
d(P, l) = 〈P −Q, (v × (Q− P ))× v
|(v × (Q− P ))× v|〉 = |(Q− P )× v
|v||.
Reminder 6 How to compute the distance between two skew lines l1 and l2with directional vectors v1 and v2:
d(l1, l2) =|〈P2 − P1,v1 × v2〉|
|v1 × v2|
where P1 ∈ l1 and P2 ∈ l2.
7

3 Week 3: straight lines, planes, spheres andcircumferences in R3
Reminder 7 (Relationship between lines with cross/dot products) Therelationship between two lines can be studied in different ways. One way is touse only products: let us see a possible procedure.
Let l : P + tu and r : Q+ tv be two lines in R3.
u× v
= 0 6= 0
−→PQ × uPARALLEL
= 0
NOT PARALLEL
< −→PQ, u× v >
= 0
6= 0= 06= 0
COINCIDENT PARALLEL INTERSECTING SKEWDISTINCT
The proof of the different steps is easy and left to the reader.
Reminder 8 (Distance between skew lines) Let l : P + tu and r : Q +tv be two skew lines in R3. There exists only one straight line s : S + t−→nperpendicular to both of them. Notice that −→n must be perpendicular to both uand v, then we compute it using the cross product. In particular, let −→n be theunit vector (this will be useful in the next)
−→n =u× v
|u× v|.
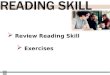
The minimum distance between l and r is the length of the segment thatjoins l and r on that perpendicular line. We can compute it in the followingway. Keep l fixed and shift r, without changing its direction, along p until itmeets l. l and the shifted r determine a plane that we name Π1. Analogously,keep r fixed and shift l without changing its direction, along p until it meets r:we obtain a plane Π2 which is parallel to Π1. Now, it is sufficient to compute thedistance between these two planes to get the minimum distance between l and r.Notice that we can write Π1 : (x, y, z) · −→n + d1 = 0, Π2 : (x, y, z) · −→n + d2 = 0and also: P · −→n + d1 = 0 and Q · −→n + d2 = 0. In conclusion
d(l, r) = |d2 − d1| = |〈−−→PQ,−→n 〉|.
Exercise for the reader: prove that |d2 − d1| is actually the distance betweenΠ1 and Π2. Hint: choose any point point of Π1 and then compute the distancebetween this point and Π2 using the known formula.
Exercise 13 Compute the distance between l : t(0, 2, 3) and r : 2x − y + z =3x+ y − 2z − 1 = 0.
8

Figure 1: Minimum distance between two skew lines
SolutionLet us write r in a parametric form. Summing 2x − y + z = 0 and 3x + y −2z − 1 = 0 we obtain 5x − z = 1. Let us fix x = t, where t ∈ R is theparameter. Then z = 5t − 1 and y = 2x + z = 7t − 1. Hence, r is given by(x, y, z) = (0,−1,−1) + t(1, 7, 5). Do l and r have an intersection point? No,because t1(0, 2, 3) = (0,−1,−1) + t2(1, 7, 5) has no solution. Moreover, l andr are not parallel since there is no λ ∈ R such that (1, 7, 5) = λ(0, 2, 3). Inconclusion l and r are skew. Now,
u× v = det
−→i 0 1−→j 2 7−→k 3 5
= (−11, 3,−2).
|u× v| =√
121 + 9 + 4 =√
134
Then −→n = (−11,3,−2)√134
. Finally,
d(l, r) = |〈(0,−1,−1),−→n 〉| = 1√134
.
Reminder 9 (Sphere) A sphere in Rn is the set of all the points that havefixed distance from a given point, that is, given C ∈ Rn and R > 0, sphere =
{P ∈ Rn : |−−→CP | = R. C is called the center of the sphere, R is the radius. In
R3: C = (x0, y0, z0), P = (x, y, z), then the equation is (x− x0)2 + (y − y0)2 +(z − z0)2 = R2: this should sound familiar.
Reminder 10 (Circumference in R3) The intersection of a sphere and aplane in R3 is always a circumference. Any circumference in R3 can be ex-pressed as the intersection between a sphere and a plane.
Exercise 14 Given S : x2 +2x+y2 +z2−4z = 8, write the equation of a planeΠ with normal −→n = (0, 3, 3)and such that Π ∩ S is a circumference of radius 1.
SolutionBy completion of the squares, we have: (x+1)2 +y2 +(x−2)2 = 8+1+4 = 13.Then C = (−1, 0, 2) is the center of the sphere and R =
√12 is its radius. In
general, if r is the radius of the circumference, by Pythagoras, R2−r2 = d(C,Π).
9

Π
R
d(Π, C)
r
Figure 2: Projection of a sphere intersected by a plane
In this case, Π : 3y + 3z + δ = 0 where the parameter δ ∈ R is not known.Since the distance between a point (x0, y0, z0) and a plane αx+βy+γz+ δ = 0
is |αx0+βy0+γz0+δ|√α2+β2+γ2
we have:
d(C,Π) = |6 + δ|/√
18
Therefore R2 − r2 = 13 − 1 = 12 = |6 + δ|/√
18, hence δ = −6 ± 36√
2. Inconclusion, we have two planes that fulfill the required property: Π1 : y + z −2 + 12
√2 and Π2 : y + z − 2− 12
√2.
4 Week 4: vector spaces
Reminder 11 (Vector space) An informal definition: a vector space is anyset which is closed with respect to two operations that have the known propertiesof sum and product.
A more formal definition: a vector space is a set V associated with a field Ksuch that we can define
(a) a binary1 operation, that we call sum and we indicate by “+”, betweentwo elements of V with the following properties:
(a.1) closure: for any u,v ∈ V , u + v ∈ V(a.2) common properties: the sum is commutative, associative, and there
exists an additive identity (an element 0 ∈ V such that v + 0 = v);(a) a binary operation, that we call product, between an element of V and
an element of K with the following properties:(a.1) closure: for any u ∈ V , a ∈ K au ∈ V(a.2) common properties: the product is commutative, associative, distribu-
tive, and there exists a product identity (1 ∈ K such that 1u = u for anyu ∈ V ).
1binary operation = operation between two objects
10

Notice that the operations are not priorly defined. One can define them ashe prefers, provided that the required properties hold.
Actually, we have been working with vector spaces since the beginning ofthe course: Rn with the usual operations is a vector space (on the field K = R).
From now on, we will call vectors the elements of a vector space. You cannow forget the physical interpretation of a vectors: in linear algebra, sequenceof numbers, polynomials, functions... are vectors!
Reminder 12 (Span set) We say that G ⊆ V is a generating set (= set ofgenerators = span set, and we write [G] = V or V = spanG) for V if any vectorin V can be written as linear combination of elements in V .
Next exercises will focus on the identification of vector spaces. Notice that inmany cases, we start by verifying the presence of a null element (= an additiveidentity), since it is easy to check.
Exercise 15 Determine whether of the following sets of functions is a vectorspace on the field R:
(a) R≤3[x] = {all the polynomials in x of degree ≤ 3}.(b) R=3[x] = {all the polynomials in x of degree = 3}.(c) V = {all the functionsf ∈ C2[0, 1] such that f ′′(x) = x2f(x)}.(d) V = {all the functionsf ∈ C1[0, 1] such that f ′(x) = f2(x)}.(e) V = {all the polynomials in x having a zero at x = 5}.(f) V = {all the polynomials in x of kind a0 + a1x
3, a0, a1 ∈ R}.(g) V = {all the polynomials in x of kind a0 + a1x
3, a0, a1 ∈ R, a0 6= 0}.(h) V = {all the functionsf ∈ C[0, 1] that are monotone increasing }.
Solution
(a) A generic element of R≤3[x] has the form a0 +a1x+a2x2 +a3x
3, ai ∈ R,i = 0, 1, 2, 3.
• Sum: we use the usual sum for polynomials. For any ai, bi ∈ R, i =0, 1, 2, 3, a0 + a1x + a2x
2 + a3x3 + b0 + b1x + b2x
2 + b3x3 = (a0 + b0) +
(a1 + b1)x+ (a2 + b2)x2 + (a3 + b3)x3 ∈ R≤3[x] ⇒ closure w.r.t. sum;
• Null element: P (x) ≡ 0 ∈ R≤3[x] is the additive identity for the sum;
• Product: λ ∈ R, λ(a0+a1x+a2x2+a3x
3) = λa0+λa1x+λa2x2+λa3x
3 ∈R≤3[x] ⇒ closure w.r.t. product.
This is enough to state that R≤3[x] is a vector space.(b) P (x) ≡ 0 /∈ R=3[x]: this is enough to conclude that R=3[x] is not a
vector space. If you want on other counterexample: x3 ∈ R=3[x], −x3 + x2 ∈R=3[x], but their sum /∈ R=3[x].
(c)
• f0(x) ≡ 0 ∈ V since trivially f ′′0 (x) = f ′0(x) = f0(x) = 0
• If f(x), g(x) ∈ V , then f(x) + g(x) = h(x) ∈ V by the linearity of thederivative operation: h′′(x) = f ′′(x) + g′′(x) = x2(f(x) + g(x)) = x2h(x).
• Analogously for the product: g(x) = cf(x), c ∈ R, then g′′(x) = cf ′′(x) =cx2f(x) = x2g(x).
11

Hence, V is a vector space.(d) V contains the null element f0(x) ≡ 0, but it is not closed with respect to
the sum: given f(x), g(x) ∈ V , f(x) + g(x) = h(x) then h′(x) = f ′(x) + g′(x) =f2(x) + g2(x) 6= h2(x) = f2(x) + g2(x) + 2f(x)g(x).
(e) P0(x) ≡ 0 ∈ V since trivially P0(0) = 0. Then, let sum two vectors of C,say two polynomials P1(x) and P2(x) such that P1(5) = P2(5) = 0: we obtainP1(x) +P2(x) = P3(x) ∈ V as P3(5) = P1(5) +P2(5) = 0. Finally, let check theproduct: given c ∈ R, P1(x) ∈ V , cP1(x) = Q(x) ∈ V , as Q(5) = cP1(5) = 0. Vis a vector space.
(f) Analogous to (a): V is a vector space.(g) Analogous to (b): there is no null element, V is not a vector space.(h) Let f be monotone increasing: if I multiply it by the scalar −1, I obtain
a decreasing function: V is not closed w.r.t. product, hence it is not a vectorspace.
Exercise 16 Does G = {−1, x, x2, x3 − x} span R≤3[x]?And G′ = {x, x2, x3 − x}?And G′′ = {−1, x, x2, x3 − x,−x+ 3}?
SolutionG spans R≤3[x] if any vector R≤3[x] can be written as linear combination ofvectors in G. That is, given a generic a0 +a1x+a2x
2 +a3x3, there exist bi ∈ R,
i = 0, 1, 2, 3 such that I can write it as b0(−1) + b1x+ b2x2 + b3(x3 − x)?
We recall that two polynomials are equal when the coefficients of same degreeare equal, then
a0 + a1x+ a2x2 + a3x
3 = b0(−1) + b1x+ b2x2 + b3(x3 − x)
corresponds to the linear system (in the unknowns bi, i = 0, 1, 2, 3)a0 = −b0a1 = b1 − b3a2 = b2a3 = b3
which has solution b0 = −a0b1 = a1 + a3b2 = a2b3 = a3.
As the system has solution, G spans R≤3[x]. Notice that, fixed ai, i =0, 1, 2, 3, the system has a unique solution, which implies that there is only onepossible representation for each vector of R≤3[x] as linear combination of vectorsof G.
G′ does not span R≤3[x] as P (x) ≡ 1 cannot be written as linear combinationof vectors of G.
G′′ spans R≤3[x] in a “redundant” way: for some v ∈ V there is morethan one representation as as linear combination of vectors of G. For example:
12

2x = 2(x) but also 2x = −2(−x + 3) − 6(−1). This can seen also solving thelinear system as done before: we obtain a linear system with 4 equations and 5unknowns.
This idea of “redundancy” is very important. We now introduce the conceptof basis, which is an “non redundant” generating set.
Reminder 13 (Basis) Given a vector space V , B ⊂ V is a basis for V if (a)V = spanB and (b) B is linearly independent (l.i.), that is, if B = {b1, . . . ,bn},a1b1 + a2b2 + . . . anbn = 0, a1, . . . , an ∈ K if and only if a1 = · · · = an = 0.
Exercise 17 Find a basis for R≤3[x], and deduce from it a basis for V ={P (x) ∈ R≤3[x] such that P (5) = 0} and for W = {P (x) ∈ R[x] such that P (5) =0}
SolutionIn the previous exercise we proved that G = {−1, x, x2, x3 − x} and G′′ ={−1, x, x2, x3 − x,−x+ 3} span R≤3[x]. Moreover, it is easy to prove that G isbasis: in fact a0(−1)+a1x+a2x
2+a3(x3−x) = 0 if and only if a0 = · · · = a3 = 0,that is, −1, x, x2, x3 − x are linearly independent. This is not true for G′′: it issufficient to notice that an element can be written as linear combination of otherelements, for example −x+ 3 = −(x)− 3(−1). Then G′′ is linearly dependent.
The first point of the exercise is solved, but let us do some further consid-erations before finding a basis for V . Since G′ in the previous exercise is nota span set for R≤3[x], intuition suggests that the right number of elements toform a basis for R≤3[x] is 4. This is true, in the sense that it is necessary tohave 4 elements to be a basis of R≤3[x], but it not sufficient: {x, 2x, 3x, 4x} isnot a basis!
Intuition also suggests that we need one element of each possible degree togenerate R≤3[x]. A good choice is then B = {1, x, x2, x3}, which is actually thesimplest basis we can find, and is called standard or canonical basis.
Let us start from B to deduce a basis for V . Why not starting from G? Itis the same, but starting from the canonical basis may make the computationssimpler.
A generic polynomial of R≤3[x] can be written as a0 + a1x + a2x2 + a3x
3.Now, if we impose the constraint P (5) = 0, we have a0 + a15 + a252 + a353 = 0.One coefficient is then fixed if the others are given, for instance a0 = −a15 −a252−a353. In conclusion, any polynomial in V can be written as −a15−a252−a353 + a1x+ a2x
2 + a3x3 = a1(x− 5) + a2(x2− 52) + a3(x3− 53); we have then
just 3 coefficients, and V = span{x−5, x2−52, x3−53}. Moreover, it is easy tonotice that C = {x− 5, x2 − 52, x3 − 53} is linearly independent, then a basis.
We observe that for V the number of elements of basis is 3. Since V is“R≤3[x] + a constraint”, we may say that if we add constraints we decrease thenumber of elements a basis. This number actually is important to describe avector space (see next reminder).
Let us now find a basis for W . Here there is no fixed degree: the number ofthe elements of a basis ofR[x] is infinite and a natural basis is {1, x, x2, x3, x4, . . . }.A basis for W is the analogous of C, but with no stop at degree 3: {x− 5, x2 −52, x3 − 53, x4 − 54, x5 − 55, . . . }.
Reminder 14 (Dimension of a vector space) A vector space has infinitedifferent bases. One property is common to all the bases: the number of elementsis always the same. We call this number the dimension of the vector space.
13

Exercise 18 Which are the dimensions of V and W in the previous exercise?
SolutiondimV = 3, dimW =∞.
Exercise 19 Which of the following is a basis for R3?A = {(1, 2, 0), (0, 0, 2)}B = A ∪ {(1, 2, π)}C = A ∪ {(0, 1, 0), (1, π, 0)}D = A ∪ {(1, π, 0)}
SolutionWe sum up the solution in the following table (l.i. is linearly independent forshort):
span l.i. basisA NO YES NOB NO NO NOC YES NO NOD YES YES YES
5 Week 5: linear maps and matrices
Reminder 15 (Linear map) Given two vector spaces U and V on a field K,a map f : U → V is a linear map if for any α, β ∈ K and for any u,w ∈ U ,
f(αu + βw) = αf(u) + βf(w).
Reminder 16 (Kernel and Image of a linear map) We define
• kerf = {u ∈ U : f(u) = 0V } where 0V is the null element of V };
• Imf = {v ∈ V such that there exists u ∈ U : f(u) = v}.
It can be proved that ker and Im are subspaces of U and V , respectively, andthat
dim(kerf) + dim(Imf) = dimU.
Exercise 20 Find the linear map f : R3 → R such that f(1, 2, 1) = f(0, 0, 1) =0 and f(0, 1, 0) = 1. Find kerf and Imf .
SolutionA linear map is determined when it is defined over the elements of a basis of U ,that is, when we know the images through f of the elements of a basis.
The mean of this statement will be clear at the end of this exercise.First of all, we notice that B = {b1,b2,b3}, where b1 = (1, 2, 1), b2 =
(0, 0, 1), b3 = (0, 1, 0), is a basis for R3 ♣.Our goal is to write explicitly f(u) = ... for any u ∈ R3. As B is a basis,
we know that there exist α, β, γ ∈ R such that u = αb1 + βb2 + γb3, and in
14

particular it is easy to compute that α = u1, β = u3 − u1, γ = u2 − 2u1. Nowusing the linearity:
f(u) = f(αb1 + βb2 + γb3) = αf(b1) + βf(b2) + γf(b3)
= u1f(b1) + (u3 − u1)f(b2) + (u2 − 2u1)f(b3) = u2 − 2u1.
In conclusion, f(u) = u2 − 2u1.In order to find kerf and Imf , let us first discuss their dimensions. The
theorem mentioned before states that dim(kerf) + dim(Imf) = dim(U) = 3.Now, Imf ⊆ R, then its dimension can be 0 or 1. Moreover, if it were equal tozero, Imf = {0}, but this is not the case since 1 belongs to it by the hypotheses ofthe exercise. Then dim(Imf) = 1, from which we conclude that dim(kerf) = 2.In this case the dimensions also determine the subspaces themselves. In fact,Imf = R (as for any U subspace of W , if dimU = dimW , then U = W ),and as {b1,b2} ⊂ kerf and b1 and b2 are linearly independent, then kerf =span{b1,b2}.
Quiz 1 Which of the following is not a linear map?(a) U = V = R3, ∀u = (u1, u2, u3) ∈ R3, f(u) = (u3, u2, u1);(b) U = C[0, 1], V = R, ∀g ∈ U , f(g) = g(0);(c) U = R2, V = C[0, 1], ∀u ∈ R2 f(u) = u1e
x + u2e2x;
(d) U = R2, V = C[0, 1], ∀u = (u1, u2) ∈ R2 f(u) = u1u2ex.
Solution
(a) ∀u,v ∈ R3, α, β ∈ R,
f(αu + βv) = f(αu1 + βv1, αu2 + βv2, αu3 + βv3)
= (αu3 + βv3, αu2 + βv2, αu1 + βv1)
= αf(u) + βf(v).
This is a linear map.(b) ∀g, h ∈ U , α, β ∈ R,
f(αg + βh) = (αg + βh)(0) = αg(0) + βh(0)
=αf(g) + βf(h).
This is a linear map.(c) ∀u,v ∈ R2, α, β ∈ R,
f(αu + βv) = (αu1 + βv1)ex + (αu2 + βv2)e2x
= αu1ex + αu2e
2x + βv1ex + βv2e
2x
= αf(u) + βf(v).
This is a linear map.(d) ∀u,v ∈ R2, α, β ∈ R,
f(αu + βv) = (αu1 + βv1)(αu2 + βv2)ex
αf(u) + βf(v)(αu1u2βv1v2)ex
This is not a linear map.
15

Quiz 2 Let f : R≤2(x) → R3 a linear map such that f(1) 6= 0, f(19x) 6= 0,f(2x2 − x) 6= 0. What is true?
(a) f is necessarily injective;(b) f is necessarily surjective;(c) dim(Imf) ≥ 1;(d) dim(kerf) = 2 necessarily.
Solution
As for all kind of functions, a linear map f : U → V is injective whenf(u) = f(v), u,v ∈ U implies u = v, and is surjective if Imf = V . As adifference from other functions, for linear maps it can be proved that surjective⇔ injective ♣.
We know that dimR≤2(x) = 3, then dim(ker(f)) + dim(Im(f)) = 3. Thepossible combinations are: 0+3; 1+2; 2+1; 3+0.
Since f(1) 6= 0 we know that ker(f) 6= R≤2(x), hence dim(kerf) < 3 (remindthat if S is a subspace of V and dim(S) = dim(V ), then S = V !).
A linear map is surjective ⇔ injective ⇔ kerf = {0} ⇔ dim(kerf) = 0.(a) and (b) are not true since we can easily find a counterexample: f(a0 +
a1x+ a2x2) = a0 + a1. In fact, f(1) = 1, f(19x) = 19f(x) = 19, f(2x2 − x) =
f(−x) = −1; f is not injective since ker(f) = {a0+a1x+a2x2such thata0+a1 =
0} = {a0 − a0x+ a2x2, a0, a2 ∈ R}, then dim(ker(f)) = 22
(c) is true since dim(ker(f)) ∈ {0, 1, 2}; then dim(Imf) ∈ {3, 2, 1}.(d) can be true, but it is not necessarily true.
Reminder 17 (Matrix) A matrix is a table of numbers. The numbers that filla matrix are called the entries of the matrix; in these notes will mainly considermatrices whose entries are real numbers. We write A ∈ Rm×n to name a realmatrix A, with m rows and n columns:
a11 a12 · · · · · · a1na21 a22 · · · · · · a2n
a31 a32. . .
... a3n...
......
. . ....
am1 am2 · · · · · · amn
aij ∈ R, i = 1, . . . ,m; j = 1, . . . , n (5)
Sum of matrices and product between a scalar and a matrix are naturallydefined as for vectors in Rn, element by element. It follows that two matricesmust have the same dimensions m,n to be summed.
Reminder 18 (Product between matrices) The definition of the productbetween matrices is somehow less natural. Given A ∈ Rm×n and B ∈ Rn×p,the generic entry (i, j) of the product AB is defined as
(AB)ij =
n∑h=1
aihbhj (6)
Notice that the number of columns of A must be equal to the number of rowsof B. Moreover, the product is not commutative!
2this is easily proved by noting that ker(f) = {a0− a0x+ a2x2, a0, a2 ∈ R} is spanned by{1 + x, x2} or also using the equivalence to R3
16

Let us solve two warm up exercises on matrices before investigating therelationship between matrices and linear maps.
Exercise 21 Let
A =
1/2 0 −72 1 21 4 −3
B =
3 1 10 2 10 0 1
C =
12
3/4
D =
1−16
Evaluate:(a)A+ 3B;(b) B2;(c) BTB.(d) A(2C +D);
Solution(a)
A+ 3B =
13/2 3 −42 7 51 4 0
(b)
BTB =
3 0 01 2 01 1 1
3 1 10 2 10 0 1
=
9 3 33 5 33 3 3
(c)
B2 =
3 1 10 2 10 0 1
3 1 10 2 10 0 1
=
9 5 50 4 30 0 1
(d)
2C +D =
24
3/2
+
1−16
=
33
15/2
3
315/2
=
−5124−15/2
.
Exercise 22 Given
A =
(xy −x2y2 −xy
)where x, y ∈ R not both null, show that A2 = 0.
Solution
A2 =
(xy −x2y2 −xy
)(xy −x2y2 −xy
)=
=
((xy)2 − x2y2 −x3y + x3yxy3 − xy3 −x2y2 + (xy)2
)=
(0 00 0
).
This exercise has shown that the power of a nonnull matrix may be null.
17

Exercise 23 Find a linear map f : R3 → R2 such that f(1, 5, 0) = (0, 0) andf(0, 2, 0) = (1, 0). Is it possible to express the action of f as the product betweena matrix and a vector?
SolutionWe know that a linear map is well defined when defined on a basis of its domain.This is not the case, since f is defined only on two (linearly independent) vectorsof R3: we need to define it on another (linearly independent) vector, that we canarbitrarily choose. For example, (0, 0, 1) is linearly independent from (1, 5, 0)and (0, 2, 0), and we arbitrarily decide that f(0, 0, 1) = (0, 0).
Notice that kerf = span{(1, 5, 0), (0, 0, 1)}, and dim(Imf) = 1.Let b1 = (1, 5, 0), b2 = (0, 2, 0), b3 = (0, 0, 1).Then ∀ u ∈ R3, u = αb1 + βb2 + γb3 = (α, 5α + β, γ), thus α = u1,
β = u2 − 5u1, γ = u3.
f(u) = f(αb1 + βb2 + γb3) = αf(b1) + βf(b2) + γf(b3)
= u1f(b1) + (u2 − 5u1)f(b2) + u3f(b3) = (u2 − 5u1)(1, 0) = (u2 − 5u1, 0).
The second question is: is there a matrix A such that fu = Au (u has tobe thought as a column vector, that is R3 = R3×1)? First of all A must have3 columns in order to make the product Au feasible. Second, the result of Aumust be a vector in R2, therefore A must have 2 rows.
Then, we have to fill A:(? ? ?? ? ?
) u1u2u3
=
(u2 − 5u1
0
)In the first row, we have a11u1 + a12u2 + a13u3 = u2 − 5u1, then a11 = 0,
a12 = 1, a13 = −5. In the second row, we have a21u1 + a22u2 + a23u3 = 0, thena21 = a22 = a23 = 0. Notice that this is the only one possible choice of thecoefficients aij , given that u is not fixed.
(0 1 −50 0 0
) u1u2u3
=
(u2 − 5u1
0
)This example shows that f can be associated with a matrix. This can be
done for any linear map, in different ways based on different bases, as will beinvestigated in the next.
Quiz 3 Given the linear map f : R2 → R4 such that (1,−1) ∈ ker(f) and(2,−1) ∈ f−1(1,−1, 1,−1) (u ∈ f−1(v) means that f(u) = v, f−1 indicatesthe inverse image), the matrix M such that, for all u ∈ R2, f(u) = Mu is(a)
M =
2 2−1 −12 2−1 −1
(b)
M =
1 1−1 −11 1−1 −1
18

(c)
M =
(1 −1 1 −11 −1 1 −1
)(d)
M =
(1 −1 1 −31 −1 1 −1
)Quiz 4 Given f defined in Quiz 3,(a) ker(f) = span{(1,−1)} and Im(f) = span{(1,−1, 1,−1)}(b) dim(kerf) + dim(Imf) = 4(c) ker(f) = span{(1,−1), (0, 1)}(d) A basis for ker(f) is {(1,−1), (0, 0)}
Quiz 5 Given f defined in Quiz 3,(a) f is surjective(b) f is injective(c) g(x1, x2, x3, x4) = (x1,−x1) is a linear map such that g(kerf) = Imf(d) g(x1, x2, x3, x4) = (x1,−x1) is a linear map such that g(Imf) = kerf
Solution of Quiz 3: (b)(c) and (d) are false because the dimension of the matrix should be 4 × 2, not2× 4. The kernel condition holds for both (a) and (b), but if (a) were true,
f
(2−1
)= 2f
(10
)− f
(01
)=
2−12−1
which contradicts the hypotheses.Solution of Quiz 4: (a)We know that dim(kerf) + dim(Imf) = dim(R2) = 2. Then (b) is false. Imageand kernel contain at least a nonnull vector, then dim(kerf) ≥ 1, dim(Imf) ≥ 1,but since their sum is 2, we must have dim(kerf) = dim(Imf) = 1, and (a)holds true. (c) is then false since ker(f) cannot be generated by two linearlyindependent vectors. (d) is false because (0, 0) never belongs to a basis (whilekerf = span{(1,−1), (0, 0)} would have been correct, since not stating that{(1,−1), (0, 0)} is a basis).Solution of Quiz 5: (d)The kernel of f has not dimension 0, then (a) and (b) are false. (c) is falsesince g is defined over R4, so g(ker(f)), ker(f) being a subspace of R2, makesno sense. (d) is true as any vector in Imf can be written as a(1,−1, 1,−1),a ∈ R, then g(a(1,−1, 1,−1)) = ag(1,−1, 1,−1) = a(1,−1) which actually isthe expression for any vector in ker(f).
6 Week 6: more on matrices
Reminder 19 Some definitions:
19

• The kernel of a matrix A ∈ RM×N is the set ker(A) = {x ∈ RN : Ax =0 ∈ RM}.
• The range of a matrix is the space generated by its columns.
• The rank of a matrix is the dimension of the range.
Reminder 20 Given the linear system Ax = b, A ∈ RM×N , x ∈ RN , b ∈RM , and denoting by rank(A) and rank(A|b) the ranks of A and of the enlargedmatrix (A|b), we know that:- If rank(A) < rank(A|b), then the system has no solution;- If rank(A) = rank(A|b) = ρ, then the sytem admits solution. In particular, itadmits a unique solution when N = ρ and infinitely many solutions when N > ρ(more precisely, N − ρ is the number of free unkwnon components).
As a consequence, any homogeneous system (say when b = 0 ∈ RM ) admitsat least a solution (the null solution).
Reminder 21 A matrix row-reduced if there is at least one special entry (say,an entry below which there are only zeros) in each row.
A matrix is reduced to row-echelon form if its nonnull rows (say, rows thathave at least one entry different from zero) are above the null rows, and eachleading entry (say, the first nonzero entry of a row) is striclty to the right of theleading entry of the row above it.
Notice that each leading entry is a special entry if the matrix is in row-echelon form, which implies that a matrix in row-echelon form is row-reduced(while the vice versa is not always true).
Analogous definitions hold for column-reduction; here we will work only onrow-reduction.
Let rj be the jth row of the matrix. The allowed operations to row reduce amatrix are:
rj ↔ ri
rj → crj
rj → rj + cri
(7)
Reminder 22 The rank of a matrix is equal to the number of nonzero rows ofthe corresponding reduced matrix.
Reminder 23 Given a square matrix A ∈ RN×N , its inverse (if it exists) isthe matrix B ∈ RN×N such that AB = I, where I is the identiti matrix withsuitable dimensions. We indicate the inverse by A−1.
The following statements are equivalent:
1. ker(A) = {0}.
2. rank(A) = n (the rank is maximal).
3. A is invertible.
4. The columns of A are linearly independent.
5. The rows of A are linearly independent.
20

6. det(A) 6= 0.
7. The reduced of A has no null rows.
8. The super-reduced of A is the identity matrix.
We say that A is nonsingular if anyone of these equivalent statements hold.
Exercise 24 Consider the matrix
A =
1 0 10 1 03 0 −1
. (8)
Does A admit an inverse? If yes, compute it.
SolutionWe can check invertibility using any of the statements in 23. For example, Ican compute det(A) = −4. Or reduce the matrix: if I substitute the third rowr3 by r3 + r1, I obtain the row-reduced matrix, and it has 3 non null rows. Orcompute the kernel by AX = 0. Or...
After having verified the invertibility, let us compute the inverse.Method 1: by row-reduction 1 0 1
0 1 03 0 −1
x11 x12 x13x21 x22 x23x31 x32 x33
=
1 0 00 1 00 0 1
(9)
For simplicity (this is not necessary) let us split the system column by column.First we solve 1 0 1
0 1 03 0 −1
x11x21x31
=
100
. (10)
Let us consider the enlarged matrix 1 0 1 10 1 0 03 0 −1 0
(11)
and let us row-reduce A. The second row already has a special entry, whilethe first row does not have it. We can, for instance, perform r3 → r3 + r1 (onthe enlarged matrix): 1 0 1 1
0 1 0 04 0 0 1
(12)
We stop here and we rewrite explicitly the system: x11 + x31 = 1x21 = 04x11 = 1
(13)
Then, x21 = 0, x11 = 14 , and x31 = 3
4 .
21

Now, we solve 1 0 10 1 03 0 −1
x12x22x32
=
010
. (14)
By r3 → r3 + r1, 1 0 1 00 1 0 14 0 0 0
(15)
hence, x32 = 0, x22 = 1 and x12 + x32 = 0, then x12 = 0.Similarly, we compute the third column, and we finally obtain:
A−1 =
14 0 1
40 1 034 0 − 1
4
. (16)
Method 2: by reduction to row-echelon form (Gauss elimination)This method is analogous to Method 1, but we reduce the matrix to its row-echelon form. Let us consider the enlarged matrix 1 0 1 1
0 1 0 03 0 −1 0
(17)
and let us reduce it to its row-echelon form. The rule about the position ofthe leading entry is not fulfilled in the third row, but it sufficient to performr3 → r3 − 3r1 to have the row-echelon form: 1 0 1 1
0 1 0 00 0 −4 −3
(18)
Then,x31 = 34 , x21 = 0, and x11 = 1
4 .Observe that, in this example, row-reduced and row-echelon form mainly
differ for the position of the zero entries. Row-echelon form always has a triangleof zeros in the left-bottom part.
Method 3: super-reduction Given that A−1 exists, we have tried tocompute it by solving AX = In. As AA−1 = A−1A = In, let us multiply bothside of AX = In by A−1: A−1AX = A−1In, then InX = A−1, then X = A−1.Therefore, if super-reduce (A|In), that is, we obtain (In|B), then B = A−1.
In our case: 1 0 1 1 0 00 1 0 0 1 03 0 −1 0 0 1
(19)
By r3 → r3 − 2r1 1 0 1 1 0 00 1 0 0 1 00 0 −4 −3 0 1
(20)
22

In order to super-reduce, we need to nullify the entry in position (1, 3), and wecan do it by r1 → 4r1 + r3: 4 0 0 1 0 1
0 1 0 0 1 00 0 −4 −3 0 1.
(21)
Finally, r1 → r1/4, r1 → −r1/4: 1 0 0 1/4 0 1/40 1 0 0 1 00 0 1 3/4 0 −1/4.
(22)
In conclusion,
A−1 =
1/4 0 1/40 1 0
3/4 0 −1/4.
(23)
Method 4: Algebraic complements If you like determinants, there is a nicemethod to compute the inverse: it has been proved that
A−1 =1
det(A)CT
where C is a N ×N matrix whose entries Cij are obtained through three steps:(a) we eliminate row i and column j in A; (b) we compute the determinant ofthe so-obtained matrix; (c) we multiply the result by (−1)i+j .
We have, C11 = (−1)2 det
(1 00 −1
)= −1, C12 = 0, C13 = −3, C21 = 0,
C22 = −4, C23 = 0, C31 = −1, C32 = 0, C33 = 1.Moreover, det(A) = −4. The reader can now write the final solution and
check whether it matches to ones obtained with the other methods.Remark: what about if det(A) = 0? This method seems to be not feasible,
because we have to divide by 0 ... this is not really true: if det(A) = 0, A is notinvertible so we simply do not compute the inverse!
SUPPLEMENTARY EXERCISES
Exercise 25 Solve the matrix equation: 1 1 −12 1 01 −1 1
X =
1 −1 34 3 21 −2 5
SolutionLet call A and B the two matrices and super-reduce (A|B): if we obtain a matrixof form (I3|C), where I3 is the identity matrix of dimension 3, then X = C.In fact, AX = B is equivalent to I3X = C then X = C. Notice that thissuper-reduction (with the identity matrix instead of A at the end) is possibileonly when ρ(A) is maximal (otherwise we would obtain some null row).Let us proceed with the super-reduction: 1 1 −1 1 −1 3
2 1 0 4 3 21 −1 1 1 −2 5
r2→r2−2r1r3→r3−r1−→
1 1 −1 1 −1 30 −1 2 2 5 −40 −2 2 0 −1 2
r3→r3−2r2−→
23

1 1 −1 1 −1 30 −1 2 2 5 −40 0 −2 −4 −11 10
r2→r2+r3−→
1 1 −1 1 −1 30 −1 0 −2 −6 60 0 −2 −4 −11 10
r2→−r2r3→
12r3−→
1 1 −1 1 −1 30 1 0 2 6 −60 0 1 2 11/2 −5
r1→r1−r2+r3−→
1 0 0 1 −3/2 40 1 0 2 6 −60 0 1 2 11/2 −5
In conclusion,
X =
1 −3/2 42 6 −62 11/2 −5
To check the correctness of the solution, compute AX and verify that it is
equal to B.
Exercise 26 Use determinants to verify whether the following sets of vectorsare linearly dependent:
A = {(1, 2, 2), (2, 1, 2), (2, 2, 1)}B = {(2,−1, 2, 1), (3,−1, 1, 3), (1,−2, 2, 2), (0, 1, 2, 3)}
SolutionGiven A, let us construct the matrix with the vectors of A on the rows:
X =
1 2 22 1 22 2 1
.
Then, A is linearly dependent if and only if the rows of X are linearly depen-dent. This is equivalent to det(X) = 0 (see reminder 23). Then, let us computethe determinant:
1 2 22 1 22 2 1
= 11 22 1
− 22 22 1
+ 22 12 2
= −3− 2 · (−2) + 2 · 2 = 5.
The determinant is nonnull, hence A is linearly independent.One could obtain the same result by reduction: the reduced of X turns out tohave no null rows, hence ρ(X) = 3, which is equivalent to our result as statedin the reminder.Notice also that one could construct the matrix putting the vectors of A on thecolumns: the procedure is analogous.
Now, let us consider B and let us construct the matrix:
Y =
2 −1 2 13 −1 1 31 −2 2 20 1 2 3
.
24

Let us compute its determinant:
2 −1 2 13 −1 1 31 −2 2 20 1 2 3
= 2−1 1 3−2 2 21 2 3
+3 1 31 2 20 2 3
+ 23 −1 31 −2 20 1 3
−3 −1 11 −2 20 1 2
= 2(−12) + 9 + 2(−18)− (−15) = −36.
In conclusion, det(Y ) 6= 0, hence its rows are linearly independent and B islinearly independent.
7 Week 7: more on linear maps
Reminder 24 Given any basis of a vector space U , any vector u ∈ U canbe uniquely written as linear combination of elements of that basis. If B ={b1,b2, . . . ,bm} is a basis and
u = λ1b1 + λ2b2 + · · ·+ λmbm
we denote by(u)B = (λ1, λ2, . . . , λm)
the representation of u with respect to B.Notice that the order of the elements of the basis is fundamental: λ1 is the
coefficient of b1, λ2 of b2, etc, and the order must be preserved.Let f : U → V a linear map, B a basis for U , and C a basis for V . The
matrix MC,Bf associated with f with respect to the bases B and C is the matrix
whose columns are (f(b1))C , (f(b2))C , . . . . Clearly, MC,Bf has dim(V ) rows and
dim(U) columns.
Exercise 27 Let V = R≤3[x] be the set of all the polynomials in x, with coef-ficients in R, and with degree ≤ 3.
(1) Prove that B = {−1, x, x2, x3 − x} is a basis for V .(2) Extract from {(1, 0), (1, 1), (4, 1), (0, 1)} a basis C of W = R2.(3) Prove that f : V → W defined by f(a0 + a1x + a2x
2 + a3x3) = (a0 +
a1, a1 − a2 + 3a3) is a linear map.(4) Find the matrix associated with f with respect to the bases B and C.
Solution
(1) We know that dim(V ) = 4. Then B has the “right” number of elementto be a basis. It is then sufficient to prove that it is linearly independent.
Is B linearly independent? We can answer using different methods.Using the definition: prove that λ0(−1) + λ1x + λ2x
2 + λ3(x3 − x) = 0 ifand only if λi = 0 for i = 0, 1, 2, 3. This is true since λ0(−1) + λ1x + λ2x
2 +λ3(x3 − x) = 0 = 0 + 0x+ 0x2 + 0x3, that is,
0 = −λ00 = λ1 − λ30 = λ20 = λ3
25

which has the unique solution λi = 0, i = 0, 1, 2, 3.Using the equivalence to R4:−1 = −1 + 0x+ 0x2 + 0x3 ⇔ (−1, 0, 0, 0)x⇔ (0, 1, 0, 0)x2 ⇔ (0, 0, 1, 0)x3 − x⇔ (0,−1, 0, 1)then we write the matrix
−1 0 0 00 1 0 00 0 1 00 −1 0 1
.
Now, it quite immediate to reduce it (add the second row to the fourth one)and notice that the reduced matrix has no null rows. That is, the rank is 4, andthe rows are linearly independent.
(2) We know that dim(W ) = 2. Then it is sufficient to choose a couple oflinearly independent vectors to form a basis, for instance C = {(1, 0), (1, 1)}.
(3) Given any two sequences of coefficients a and b ∈ R4, it is easy to provethat f(Pa + Pmathbfb) = f((a0 + b0) + (a1 + b1)x . . . ) = (ao + b0 + a1 + b1, a1 +b1− (a2 + b2) + 3(a3 + b3)) = (ao + a1, a1− a2 + 3a3) + (bo + b1, b1− b2 + 3b3) =f(Pa) + f(Pmathbfb) and f(λPa) = f(Pλa) = λf(Pa) for any λ ∈ R.
(4) It is clear that MC,Bf ∈ R2×4.
Now let c1 = (1, 0) and c2 = (1, 1):f(−1) = (−1, 0) = −c1 = −c1 + 0c2 then f(−1)C = (−1, 0)f(x) = (1, 1) = c2 then f(x)C = (0, 1)f(x2) = (0,−1) = c1 − c2 then f(x2)C = (1,−1)f(x3−x) = (−1,−1 + 3) = (−1, 2) = −3c1 + 2c2 then f(x3− c)C = (−3, 2).How do I have calculated, (−1, 2) = −3c1 + 2c2 and the other coefficients?
I guess it is quite intuitive: in order to obtain 2 in the second entry, given thatthe second entry of c1 is 0, the unique contribution is from c2 and I have tomultiply it by 2; at this point I have to arrange the coefficient of c1 in order toobtain −1 in the first entry.
More formally: you have to solve the system (−1, 2) = λ1c1 + λ22c2 in theunknowns λ1 and λ2.
In conclusion
MC,Bf
(−1 0 2 −30 1 −1 2
).
Remark: what about if C was the canonical basis? In this case, f(bi)C =f(bi) where bi, i = 1, 2, 3, 4 are the vectors in B.
Quiz 6 Let f : R≤2(x) → R3 a linear map such that f(1) 6= 0, f(19x) 6= 0,f(2x2 − x) 6= 0. What is true?
(a) f is necessarily injective;(b) f is necessarily surjective;(c) dim(Im(f)) ≥ 1;(d) dim(ker(f)) = 2 necessarily.
26

SolutionWe know that dim(R≤2(x)) = 3, then dim(ker(f)) + dim(Im(f)) = 3. Thepossible combinations are: 0+3; 1+2; 2+1; 3+0.
Since f(1) 6= 0 we know that ker(f) 6= R≤2(x), hence dim(ker(f)) < 3(remind that if S is a subspace of V and dim(S) = dim(V ), then S = V !).
For a linear map, we know that surjective ⇔ injective, which in turn areequivalent to ker(f) = {0}, which in turn is equivalent to dim(ker(f)) = 0.
(a) and (b) are not true since we can easily find a counterexample: f(a0 +a1x+ a2x
2) = a0 + a1. In fact, f(1) = 1, f(19x) = 19f(x) = 19, f(2x2 − x) =f(−x) = −1; f is not injective since ker(f) = {a0+a1x+a2x
2such thata0+a1 =0} = {a0 − a0x+ a2x
2, a0, a2 ∈ R}, then dim(ker(f)) = 23
(c) is true since dim(ker(f)) ∈ {0, 1, 2}; then dim(Im(f)) ∈ {3, 2, 1}.(d) can be true, but it is not necessarily true.
8 Week 8: endomorphisms, eigenvectors, eigen-values
Reminder 25 1. A linear map f from a vector space V to itself (f : V → V )is also called endomorphism
2. Given a vector space V of dimension n and a basis B = (b1, . . . ,bn) of it,any v ∈ V there exists a unique sequence of scalar coefficients α1, . . . , αnsuch that v =
∑ni=1 αibi. We write
(v)B = (α1, . . . , αn)
and we call (v)B the representation of v with respect to (w.r.t.) the basisB.
3. The matrix associated with f : V → V w.r.t. to B is
MB,Bf =
...
......
(f(b1))B (f(b2))B · · · (f(bn))B...
......
that is, MB,B
f is the matrix that has on the columns the representationsof f(b1), . . . , f(bn) w.r.t. to B.
Notice that MB,Bf turns out to be a square matrix. Moreover, if V = Rn
and B is the canonical basis, for any v ∈ V , f(v) = MB,Bf v, that is, the
action of f on v corresponds to multiply v by the matrix MB,Bf .
There is then an equivalence between endomorphisms and square matri-ces! This is why in the next we will define properties for both endomor-phisms/square matrices.
4. Given A ∈ Rn×n, a vector v ∈ Rn such that is called eigenvector of A ifthere exists a scalar λ such that Av = λv
3this is easily proved by noting that ker(f) = {a0− a0x+ a2x2, a0, a2 ∈ R} is spanned by{1 + x, x2} or also using the equivalence to R3
27

5. Such λ is called eigenvalue of A.
6. (Eigenvectors and eigenvalues can be equivalently defined for endomor-phisms: f(v) = λv)
7. How to compute the eigenvalues? By solving the equation det(A−λI) = 0.det(A− λI) is called the characteristic polynomial.
8. If you know the eigenvalues, you can find the eigenvectors by solving thesystems (A− λI)v = 0 for each value of λ. (Why eigenvalues and eigen-vectors are computed in this way? This is easy to prove, and left to thereader as an exercise).
9. We call eigenspace the vector space generated by an eigenvector.
10. Algebraic Multiplicity of λ = multiplicity of λ as zero of the characteristicpolynomial. Example: if (λ − 2)(λ3)2, 2 and 3 are the zeros, and 2 hasalgebraic multiplicity 1, while 3 has algebraic multiplicity 2. In the next,we will denote the algebraic multiplicity by µ.
11. Geometric Multiplicity of λ = dimension of the eigenspace of λ. In thenext, we will denote the geometric multiplicity by ν.
12. It holds 1 ≤ ν ≤ µ for any eigenvalue. Moreover, the sum of the algebraicmultiplicities is equal to n.
13. If for each eigenvalue of A ν = µ, A is said to be diagonalizable (orequivalently we say that the endomorphism f associated with A is simple)
Quiz 7 Let f be an endomorphism of R2 such that u = (1, 2) is an eigenvectorassociated with the eigenvalue 2 and such that v = (−1, 3) ∈ f−1(u) (that is,f(v) = u).(a)
ME,Ef =
1
5
(3 38 6
).
is the matrix of f with respect to the canonical basis E = {e1, e2} = {(1, 0), (0, 1)}(b)
ME,Ef =
1
5
(1 38 6
)is the matrix of f with respect to the canonical basis E = {e1, e2} = {(1, 0), (0, 1)}(c)
MB,Bf =
(2 10 0
)is the matrix of f with respect to the basis B = {u,v}(d)
MB,Bf =
(2 10 0
)is the matrix of f with respect to the basis B = {u, f2(v)} (f2(u) = f(f(u)))
28

Quiz 8 Given f defined in Quiz 7,(a) rank(f) = 2(b) null(f) = 2(c) null(f) = 1(d) a basis for ker(f) is {(1, 34 )}
Quiz 9 Let f be the endomorphism of R3 defined as f(x, y, z) = (x+ y+ z, x+y + z, x+ y + z):(a) ker(f) = {(α, β, α− β), α, β ∈ R}(b) ker(f) = span{(0, 0,−1), (0, 1,−1)}(c) f(x, y, z) = (0, 0, 0) if and only if x+ y − z = 0(d)(1, 0,−1) and (0, 1,−1) are linearly independent vectors belonging to ker(f)
Quiz 10 Given f defined in Quiz 9(a) (π, π, π) is an eigenvector associated with eigenvalue 3(b) (π, π, π) is an eigenvector associated with eigenvalue 2(c) (π, π, π) is not an eigenvector(d) a nontrivial subspace of ker(f) must have dimension 2
Solution 7 (c)
Let us compute ME,Ef =
(f
(10
)f
(01
)).
f
(12
)= f
(10
)+ 2f
(01
)2
(12
)
f
(−13
)= −f
(10
)+ 3f
(01
)(12
)Combining these equations we obtain
f
(10
)=
1
5
(48
)f
(01
)=
1
5
(36
)and
ME,Ef =
1
5
(4 38 6
).
Then (a) and (b) are false. (d) is false since f2(u) = f(f(u)) = 2u, then u andf2(u) are linearly dependent and do not form a basis.
To verify that (c) is true, let us compute MB,Bf
f
(12
)2
(12
)+ 0
(−13
)
f
(−13
)(12
)+ 0
(−13
)Then the entries of the first colum are 2 and 0, and the entries of the secondcolum are 1 and 0.Solution 8 (c)
29

The rank of the matrix is 1, then the kernel has dimension 1. Moreover it iseasy to compute that a basis for the kernel is {(1,− 4
3 )}.Solution 9 (d)
The kernel contains all those vectors (x, y, z) s.t. x + y + z = 0, that is, ofkind (a, b,−a − b) a, b ∈ R. Since (a, b,−a − b) = a(1, 0,−1) + b(0, 1,−1), it isclear that {(1, 0,−1), (0, 1,−1)} is a basis for the kernel.Solution 10 (a)
(d) is false because any nontrivial subspace (= a subspace different from {0}and from the space itself) must have dimension 1.
9 Week 9: multiple choice quizzes
Quiz 11 The matrix 1 1 10 −2 03 0 −1
(a) has no eigenvectors since it is square(b) has only one eigenvalue λ = −2(c) has two complex eigenvalues(d) has only real eigenvectors
Quiz 12 The matrix 1 0 04 k 00 0 1
(24)
(a) if k = 1 has null eigenvectors(b) if k = 1 has an eigenspace which is a plane(c) if k = 0 the endomorphism associated with is surjective(d) if k = 0 the endomorphism associated with is not linear
Quiz 13 Let f be a non surjective endomorphism of R3 having 2 and 4 amongits eigenvalues. Then
(a) the algebraic multiplicity of the eigenvalue 2 is 2.(b) there exist two linearly independent eigenvectors for the eigenvalue 2(c) f has only one eigenspace(d) f has 3 distinct eigenvalues
Quiz 14 The rank of a matrix(a) corresponds to the dimension of the kernel(b) can be computed only for square matrices(c) can be computed only for endomorphisms(d) never exceeds the minimum dimension of the matrix
Quiz 15 A linear map from R3 to R≤3[X](a) if the image has dimension 2, the kernel is a straight line(b) can have image of dimension 4(c) if the image has dimension 2, the kernel has dimension 2(d) can have kernel of dimension 4
30

Quiz 16 Let us consider the system Ax = 0 where
A =
1 3 12 6 00 0 1
.
Its solution set is(a) a straight line(b) does not exist since the matrix is not reduced(c) the union of two parallel planes(d) is not a vector space
Quiz 17 The linear system x− y + z − t = 1x+ 2y + 3z + 3t = 0−2x− y − 4z − 2t = 8
(25)
(a) has one free unknown as 4 unknowns - 3 equations =1
(b) has one free unknown as the determinant of
(1 −11 2
)is nonzero
(c) has ∞2 solutions(d) has no solution
Quiz 18 The set V = {u = (u1, u2, u3, u4) ∈ R4 : u1 + 3u2 − 6u4 = 0}(a) is not a subspace as it does not contain the null vector(b) has bases composed by two vectors(c) is the kernel of a surjective linear map f : R4 → R
(d) is the image of an injective endomorphism f : R4 → R4
Quiz 19 The matrix 1 1 11 2 00 0 1
(26)
(a) has an eigenvalue with algebraic multiplicity µ equal to 2(b) has an eigenvalue with geometric multiplicity ν equal to 2(c) all the eigenvectors have µ = ν (i.e., the matrix is diagonalizable)(d) has an eigenspace of dimension 3
Quiz 20 (a 00 a
)a ∈ R
(a) is not diagonalizable(b) has all the eigenvectors null(c) has two eigenspaces respectively generated by (a, 0) and (0, a)(d) has eigenspace = R2
Quiz 21 A plane ax+ by + cz + d = 0 in R3
(a) is a vector space of dimension 2 if it contains (0, 0, 0)(b) is a vector space of dimension 2 only if it is parallel to the coordinate
plane z = 0(c) is never a vector space(d) is always a vector space
31

Quiz 22 Given f : R3 → R3, f(x, y, z) = (x, y, y + z),
M =
1 0 00 2 10 −1 0
(a) M = MB,B
f where B = {(1, 1, 0), (0, 0, 1), (0, 1, 0)}(b) M = MB,B
f where B is the canonical basis
(c) M = MB,Bf where B = {(1, 1, 0), (0, 0, 1), (1, 1, 1)}
(d) M = MB,Bf where B = {(1, 0, 0), (0, 1, 1), (0, 1, 0)}
Solution of Quiz 11 (d)Notice that (a) is completely nonsense.Let us compute the eigenvalues/eigenvectors of the matrix.
det
1− λ 1 10 −2− λ 03 0 −1− λ
= (1− λ)(−2− λ)(−1− λ) + 3(2 + λ)
= (2 + λ)[3 + (1− λ2)] = (2 + λ)(4− λ2) = (2 + λ)(2 + λ)(2− λ)
The zeros of the characteristic polynomial are λ1 = 2 with µ1 = 1 and λ2 = −2with µ2 = 2.
Let us compute also the eigenvectors:λ = 2: −1 1 1
0 −4 03 0 −3
v = 0⇒ v = (α, 0, α) = α(1, 0, 1), α ∈ R
Notice that the geometric multiplicity, which is the dimension of the spacegenerated by (1, 0, 1), is ν1 = 1
λ = −2: 3 1 10 0 03 0 1
v = 0⇒ v = (α, 0,−3α) = α(1, 0,−3), α ∈ R
and ν2 = 1.Solution of Quiz 12 (b)
First notice that (d) is nonsense (by definition an endomorphism is a linearmap!).
If k = 1, it is easy to see that the characteristic polynomial is (1 − λ)3,then λ = 1 and µ = 3. The associated eigenvector is given by (0, α, β),α, β ∈ R and since (0, α, β) = α(0, 1, 0) + β(0, 0, 1), then the eigenspace isspan{(0, 1, 0), (0, 0, 1)}. But a subspace of dimension 2 in R3 is a plane. In fact,the parametric formula of a plane is (x, y, z) = P + t1Q+ t2R where P,Q,R arepoints in R3 and t1, t2 are scalar coefficients. Now, (x, y, z) = P + t1Q + t2Ris not always a vector space (it may not contain the null element!), but if itcontains the null element and then we can write it as (x, y, z) = t1Q + t2R forsuitable value of Q and R, this is a vector space (generated by Q and R).
32

In order to check (c), we first remind that the following are equivalent: 1.an endomorphism is injective; 2. an endomorphism is surjective; 3. an endo-morphism is bijective, and finally 4. the kernel of the endomorphism containsonly the null element.
One can verify that (c) is false observing that if k = 0 the matrix has rank2 (non maximal), while a an endomorphism is bijective only if the associatedmatrix has maximal rank (can the reader explain why?).Solution of Quiz 13 (d) If an endomorphism is non surjective, it always hasthe eigenvalue 0.
In fact, we know that (see the solution of the previous quiz), if an endomor-phism f is not surjective, then its kernel contains something more than 0. Letus suppose that v 6= 0 is in the kernel of f . Then f(v) = 0, or also f(v) = 0v.Then v is an eigenvector for the eigenvalue 0!
In conclusion we have 3 different eigenvalues λ1 = 0, λ2 = 2, λ3 = 4, Sincethe sum of the algebraic multiplicities must be 3, then µ1 = µ2 = µ3 = 1 (then(a) is false). It follows also that ν1 = ν2 = ν3 = 1, which implies that (b) and(c) are false.Solution of Quiz 14 (d)
No computation is required for this quiz, just study the theory.Solution of Quiz 15 (a)
Use the theorem dim(ker(f)) + dim(Imf) = dim(V ) where f : V → W . Inthis case dim(V )=3 and dim(W )=4, then it is easy to prove that the uniquefeasible statement is (a): if the image has dimension 2, the kernel must havedimension 1. But a subspace of dimension 1 in R3 is nothing but a straight linepassing throgh zero!Solution of Quiz 16 The reduced matrix is 1 3 1
0 0 10 0 0
.
Therefore the solution set is {v = (−3a, a, 0) a ∈ R}, and (−3a, a, 0) =a(−3, 1, 0) is a straight line.Solution of Quiz 17 (d)
The augmented matrix of the system is: 1 −1 1 −1 11 2 3 3 0−2 −1 −4 −2 8
.
We reduce it by r3 → r3 + r1 + r2 1 −1 1 −1 11 2 3 3 00 0 0 0 9
.
In conclusion rank(A) = 2, while rank(A|B) = 3, then the system has nosolution.Solution of Quiz 18 (c) V is subspace of dimension 3. An injective endomor-phism must have ker of dimension 0, then if f was injective, it should have kerof dimension 4 (that is, Imf = R4). Then (c) is the unique feasible statement.We can explicitly write that f(u1, u2, u3, u4) = u1 + 3u2 − 6u4.
33

Solution of Quiz 19 (c) The eigenvalues of the matrix are 1, and 3±√5
2 . Theyall have µ = ν = 1.Solution of Quiz 20 (d)
The matrix has eigenvalue λ = a with µ = 2, and the eigenspace is R2.Solution of Quiz 21 (a) This point has already been discussed in the solutionof Quiz 12. Examples: the plane x+ y + z = 0 is vector space, in particular itis generated by (1, 0,−1) and (0, 1,−1); x+ y + z = 1 is not a vector space.Solution of Quiz 22 (d)
(c) is false because B is not a basis!(b) is false because it is easy to prove that if B is the canonical basis f(v) =
MB,Bf v where
MB,Bf =
1 0 00 1 00 1 1
Let us consider (a), b1 = (1, 1, 0)T , b2 = (0, 0, 1)T . Then (a) is false as
(f(b1)) = (1, 1, 1)T = b1 + b2, and (f(b1))B = (1, 1, 0)T , which is differentfrom the first column of the given matrix.
(d) is true, in fact:Let b1 = (1, 0, 0)T , b2 = (0, 1, 1)T , b3 = (0, 1, 0)T
(f(b1)) = (1, 0, 0)T = b1 ⇒ (f(b1))B = (1, 0, 0)T
(f(b2)) = (0, 1, 2)T = 2b2 − b3 ⇒ (f(b1))B = (0, 2,−1)T
(f(b3)) = (0, 1, 1)T = b2 ⇒ (f(b1))B = (0, 1, 0)T .
10 Week 10: other multiple choice quizzes
Reminder 26 Given a square matrix A ∈ RN×N ,
1. given B ∈ RN×N , we say that A and B are similar if there exists P ∈RN×N such that A = P−1BP (or equivalently B = PAP−1).
2. Similar matrices have the same eigenvalues, the same rank, the same de-terminant.
3. A is diagonalizable if it is similar to a diagonal matrix. 4
4. If a matrix A ∈ Rn×n is diagonalizable, then the collection of its eigen-vectors is basis for Rn, and vice versa.
5. A symmetric matrix is diagonalizable and its eigenvectors are orthogonal.
Some of these quizzes are taken or inspired by the book of Carlini “50 mul-tiple choices in geometry”.
Quiz 23 Let A ∈ R3×3 with det(A)=0.(a) A is the matrix of an isomorphsim(b) the rank of ATA is 3
4In the previous weeks I said that a matrix is diagonalizable if the algebraic and geometricmultiplicities coincide for each eigenvalue. This is more a property or an “operative definition”which is useful to solve the exercises (thati is, to verify the diagonalizability.) The formaldefinition is the one I have written here.
34

(c) A has the null eigenvalue(d) the row-echelon form of A has just one null row
Quiz 24 The matrix (0 00 0
)(a) is not diagonalizable(b) has the eigenvalue 10(c) the only eigenspace of A is generated by (1, 0) and (0, 1)(d) any vector of R2 is an eigenvector of A
Quiz 25 Let V and W subspaces of R5 and let dim(V ) = 4. What is true?(a) it is possible to find W such that dim(V +W ) = 5(b) if dim(W )=2, dim(V ∩W ) ≤ 1(c) if dim(W )=1, dim(V ∩W ) = 0(d) V ∩W contains an infinite number of vectors
Quiz 26 Consider the following subspaces of R3: U =span{(1, 0, 1), (0, 1, 0)}and V =span{(1, 2, 3)}.
(a) any endomorphism of R3 having eigenspaces U and V is simple(b) any matrix having eigenspace U has the vector (1, 1, 1)T on the second
column(c) there exists a symmetric real matrix with eigenspaces U and V(d) there exists a unique symmetric real matrix with eigenspaces U and V
Quiz 27 Consider the following subspaces of R3: U =span{(1, 0, 1), (0, 1, 0)}and V =span{(1, 0,−1)}.
(a) all the endomorphisms of R3 having eigenspaces U and V are simple(b) any matrix having eigenspace U has the vector (1, 1, 1)T on the second
column(c) there exists a symmetric real matrix with eigenspaces U and V(d) there exists a unique symmetric real matrix with eigenspaces U and V
Quiz 28 Let A ∈ R4×4 have two distinct eigenvalues λ1 and λ2, and νλ1= 3.
Let Vλ denote the eigenspace associated with the eigenvalue λ. Then(a) dim(Vλ1) ≥ dim(Vλ2)(b) dim(Vλ1
) < dim(Vλ2)
(c) Vλ1+ Vλ2
6= R4
(d) Vλ1is a cube
Quiz 29 Let f and g be endomorphisms of V . Then(a) if λ is an eigenvalue for both f and g, then it is eigenvalue of g(f)(b) if v is an eigenvector for both f and g, then it is eigenvector of g(f)(c) if λ is an eigenvalue for f and if γ is an eigenvalue for g, λ + γ is
eigenvalue of f + g(d) 0 is an eigenvalue for f only if it is eigenvalue of f(g)
Solution of Quiz 23 (c)An isomorphism (= bijective endomorphism) is always associated with a
matrix of maximal rank. If the determinant is null, the rank is not maximal.
35

Morevoer, det(ATA) = det(AT ) det(A) = 0. The row-echelon form will havesome null rows, but not necessarily one.Solution of Quiz 24 (c)
It is clear that the eigenspace is R2. Notice the difference between (c) and(d): (d) is false just because (0, 0, 0) ∈ R2 never is an eigenvector!Solution of Quiz 25 (a)
(b) is false as dim(V ∩ W ) ≤ 2 from what we know about intersectionsof subspaces; analogously (c) is false, as dim(V ∩ W ) ≤ 1; (d) is false sinceV ∩W = {0} is not impossible.Solution of Quiz 26 (a)
An endomorphism is simple if it admits a basis of eigenvectors, and in thiscase (1, 0, 1), (0, 1, 0), (1, 2, 3) form a basis.
(b) is false: if we consider the eigenvector v = (0, 1, 0)T , we have, for someλ ∈ R,
Uv = λv⇒
· a ·· b ·· c ·
010
=
abc
= λ
010
. (27)
(c) is false since the eigenvectors of a symmetric real matrix are orthogonal;(d) is false as (c) is false.
Solution of Quiz 27 (c)(a) and (b) are false (see previous quiz)(d) is false: as a counterexample, do the eigenvalue/eigenvector analysis of 1/2 0 1/2
0 1 01/2 0 1/2
1/2 0 −1/20 0 0−1/2 0 1/2
Can you derive the generic expression of a symmetric matrix with eigenspaces
U and V ?Solution of Quiz 28 (a)
In general, we know that νλ ≤ µλ. Since µλ1≥ 3, µλ2
≥ 1 and µλ2+µλ1
= 4,then µλ1
= 3, µλ2= 1; moreover νλ2
= 1. Hence, (a) is true and (b) is false.(d) makes no sense.
Notice that such an A is diagonalizable (the multiplicities coincide for eacheigenvalue), hence the eigenvectors form a basis. As a consequence the eigenspacesVλ1
and Vλ2intersect only in 0, and their sum is the whole space R4.
Observe that if A was not diagonalizable, the interesection could be “larger”and the sum could be “smaller”.Solution of Quiz 29
(This quiz is bit more difficult than the other ones)Let us start from (d). Remind that ”Statement A holds only if statement
B holds “ means that ”A implies B” (while ”Statement A holds if statementB holds “ means that ”B implies A”). Then, we have to check whether “0eigenvalue of f” implies “0 eigenvalue of f(g)”. To see that this is not alwaystrue, let f(v) = 0 (v is the eigenvector of eigenvalue 0): if v is not in the imageof g, then (d) is false. For instance let image(g)=span(0, 1) and v = (1, 0): thisprovides a clear counterexample.
(c) is true only if f and g have the same eigenvector for λ and γ. Coun-terexample: f(x, y) = (x, 0) and g(x, y) = (0, y) both have the eigenvalue 1, but(f + g)(x, y) = (x, y) is the identity map, and has no eigenvalue equal to 2.
36

The same example can be used to check that (a) is not generally true: f andg have the eigenvalue 1, while g(f) maps anything in (0, 0).
(b) is true: if f(v) = λv and g(v) = γv, then g(f(v)) = g(λv) = λ(g(v)) =λγv, so v is an eigenvector for g(f) with eigenvalue λγ.
11 Week 11: more on similar and diagonalizablematrices, and change of basis
Reminder 27 Let v ∈ V , dim(V ) = N , B = {b1, . . . ,bN}, C = {c1, . . . , cN}be bases of V , and (v)B be the vector of coefficients of v with respect to the basisB. We have
(v)B = PB,C(v)C
where PB,C has (c1)B , . . . (cN )B on the columns. It is known that PB,C isinvertible, and (PB,C)−1 = PC,B; PB,C is called change basis matrix.
Reminder 28 If we consider a linear map f : V →W , B,B′ bases of V , C,C ′
bases of W then
MC′,B′
f = PC′,CMC,B
f PB,B′.
For endomorphisms, f : V → V , B,C bases of V ,
MC,Cf = PC,BMB,B
f PB,C = (PB,C)−1MB,Bf PB,C .
Reminder 29 A square matrix P is said to be orthogonal if P−1 = PT .If A is symmetric, it also diagonalizable, and A = PΛP−1 (Λ is a diagonal
matrix) where P is orthogonal, then A = PΛPT .
Exercise 28 Let
A =
2 0 10 1 20 0 1
B =
2 0 10 1 00 0 1
C =
1 0 10 1 01 0 1
(a) Compute the eigenvalues and the eigenvectors;(b) Discuss the diagonalizability.
Solution
|A− λI| =
∣∣∣∣∣∣2− λ 0 1
0 1− λ 20 0 1− λ
∣∣∣∣∣∣ = (2− λ)(1− λ)2 = 0.
The eigenvalues are λ1 = 1 with algebraic multiplicity µλ1 = 2 and λ2 = 2,µλ2 = 1. Given that for any eigenvalue λ the geometric multiplicity νλ is lessor equal than the algebraic one: 1 ≤ νλ ≤ µλ, then νλ2
= 1.In order to compute νλ1
, let us solve the system (A− λ1I)v = (0, 0, 0)T . Since
(A− I) =
1 0 10 0 20 0 1
.
37

and reducing it one obtains 1 0 10 0 20 0 0
.
it is easy to find that the solution is v = α(0, 1, 0)T , α ∈ R. The eigenvectorsof λ1 = 1 are then all the vectors v1 = α(0, 1, 0)T , α ∈ R, α 6= 0, whilethe corresponding eigenspace is Vλ1 = span{(0, 1, 0)}. In particular, νλ1 =dim(Vλ1) = 1.Since νλ1
6= µλ1, then A is not diagonalizable.
Finally, let us compute the eigenvectors of λ2 = 2:
(A− 2I) =
0 0 10 −1 20 0 −1
.
and reducing it one obtains 0 0 10 −1 20 0 0
.
then v2 = α(1, 0, 0)T .
Notice that B has the same characteristic polynomial, then the same eigen-values of A. However, for B νλ1 = 2. In fact
(B − I) =
1 0 10 0 00 0 0
.
then, rank(B − I) = 1 and νλ1= 3 − 1 = 2. Explicitly, the solution of
(B − I)v = (0, 0, 0)T is the set {(α, β,−α)T , α, β ∈ R}. Then the eigenvectorsare all the nonnull solutions and given that (α, β,−α) = α(1, 0,−1) +β(0, 1, 0),Vλ1
= span{(1, 0,−1), (0, 1, 0)}.Given that the geometric and algebraic multiplicities coincide for all the eigen-values, B is diagonizable.In particualar, notice that v2 = α(1, 0, 0), α ∈ R, α 6= 0 are the eigenvalues ofλ2 = 1. Then, we can diagonalize in this way:
Λ = P−1BP
where
Λ =
1 0 00 1 00 0 2
P =
1 0 10 1 0−1 0 0
.
P−1 can be easily obtained with the method of algebraic complements or bysuper-reduction (by the transformations: r1 → r1 + r3; r3 → −r3; r3 ↔ r1 onthe matrix (P |I), so that we obtain (I|P−1).
P−1 =
0 0 −10 1 01 0 1
.
38

C is diagonalizable since it is symmetric.
|C − λI| =
∣∣∣∣∣∣1− λ 0 1
0 1− λ 01 0 1− λ
∣∣∣∣∣∣ = (1− λ)3 − (1− λ) = (1− λ)λ(λ− 2) = 0.
The eigenvalues are λ1 = 0, λ2 = 1, λ3 = 2.We then have Vλ1 = span{(1, 0,−1)}, Vλ2 = span{(0, 1, 0)}, Vλ3 = span{(1, 0, 1}.We normalize the eigenvectors and we write them on the columns of the
matrix P :
P =1√2
1 0 1
0√
2 0−1 0 1
Notice that 1 0 1
0 1 01 0 1
=1√2
1 0 1
0√
2 0−1 0 1
0 0 00 1 00 0 2
1√2
1 0 −s10√
2 01 0 1
Exercise 29 Let
A =
(1 1k 2
)B = {(2, 1), (1, 1)} (28)
(a) For which values of k ∈ R the endomorphism f of R2 associated to thematrix A with respect to the basis B is simple?
(b) Write the matrix of the endomorphism with respect to the standard basis.
Solution(a) The eigenvalues of A are given by p(λ) = (1−λ)(2−λ)−k = λ2−3λ+2−k =0. The roots of the polynomial are not real (hence A is not diagonalizable) fork < − 1
4 .If k = − 1
4 , we have two coincident roots, that is λ = 32 with µλ = 2. Let us
check the geometric multiplicity:
A− 3
2I =
(−1/2 1−1/4 1/2
)(29)
has rank equal to 1, then νλ = 2 − 1 = 1 6= µλ. Even in this case A is notdiagonalizable.Finally, A is diagonalizable whenever k > − 1
4 , as in this case A has two realdistinct eigenvalues λ1 6= λ2. Remind that this is sufficient to have µλi
= νλi,
i = 1, 2, since in general νλ ≤ µλ.In conclusion, f is simple for any k > − 1
4 .
(b) We can explicitly write f :
f(2, 1) = 1(2, 1) + k(1, 1)f(1, 1) = 1(2, 1) + 2(1, 1)
Then, on the standard basis, f(1, 0) = f(2, 1) − f(1, 1) = (k − 2)(1, 1) andf(0, 1) = 2f(1, 1) − f(2, 1) = (2, 1) + (4 − k)(1, 1) = (6 − k, 5 − k) and finallyf(x, y) = xf(1, 0) + yf(0, 1) = x(k − 2, k − 2) + y(6− k, 5− k).
39

ME,Ef =
(k − 1 6− kk − 1 5− k
). (30)
Other method: use ME,Ef = PE,BMB,B
f ∗ PB,E
PE,B =
(2 11 1
). (31)
PB,E =
(1 −1−1 2
). (32)(
2 11 1
)(1 1k 2
)(1 −1−1 2
). (33)
Exercise 30 Let f be the endomorphism of R2×2 defined as
f
(x yz t
)=
(x+ 3y 2x+ 2yz + 2t 2z + t
)(34)
(a) Compute eigenvalues, eigenvectors, eigenspaces of f .(b) Is f simple?(c) Write a basis of eigenvectors for R2,2.(d) Is the matrix associated to f diagonalizable? If yes, write the change-of-basismatrix P to change to a basis of eigenvectors.
SolutionWe are not given a basis. Let us choose the standard basis:
B = {b1,b2,b3,b4} =
{(1 00 0
),
(0 10 0
),
(0 01 0
),
(0 00 1
)}Now, f(b1) = b1 + 2b2, f(b2) = 3b1 + 2b2, f(b3) = b3 + 2b4, f(b4) = 2b3 + b4,then
MB,Bf =
1 3 0 02 2 0 00 0 1 20 0 2 1
(a) Let us compute the eigenvalues:∣∣∣∣∣∣∣∣
1− λ 3 0 02 2− λ 0 00 0 1− λ 20 0 2 1− λ
∣∣∣∣∣∣∣∣ = (1−λ){(2−λ)[(1−λ)2−4]}−3{(2[(1−λ)2−4]} = (−1−λ)2(3−λ)(λ−4).
The eigenvalues of MB,Bf are λ1 = −1, λ2 = 3, λ3 = 4 and µλ1
= 2, µλ2= 1,
µλ3= 1. Let us compute the eigenvectors: for λ1 = −1:
2 3 0 02 3 0 00 0 2 20 0 2 2
y11y12y13y14
=
0000
40

We easily compute that y1 = (α,− 23α, β,−β)T , α, β ∈ R not both zeros.
The corresponding eigenvector fo f is y11b1+y12b2+y13b3+y14b4 =
(α − 2
3αβ −β
).
Notice that this calculus actually corresponds to put the components of y1 in amatrix: this is true if and only if we work with the standard basis.
Given that
(α − 2
3αβ −β
)= α
(1 − 2
30 0
)+ β
(0 01 −1
)the corresponding
eigenspace of f is
span
{(1 − 2
30 0
),
(0 01 −1
)}.
Its dimension is 2, then νλ1 = 2.This is sufficient to conclude that f is simple: in fact, λ2 and λ3 have algebraicmultiplicity 1, then also their geometric multiplicty must be equal to 1. Inconclusion, νλi
= µλi, i = 1, 2, 3, that is, f is simple (and the corresponding
matrix is diagonalizable).
Exercise 31 Let f be the endomorphism of R2 such that (1, 2) is an eigenvectorof f for the eigenvalue 1 and (0, 1) ∈ ker(f). Say whether f is simple just lookingat the conditions (no computations!).
SolutionNotice that (0, 1) ∈ ker(f) is equivalent to state that (0, 1) is an eigenvector forthe eigenvalue 0. Then {(1, 2), (0, 1)} is a basis of eigenvectors (or equivalently,f has two distinct eigenvalues) which implies that f is simple.
Exercise 32 Let
A =
0 a b0 0 c0 0 0
with a, b, c 6= 0. Prove that A is diagonalizable without computing its eigenvalues.
SolutionUse the definition: A is diagonalizable if there exists an invertible matrix Psuch that P−1AP = Λ where Λ is a diagonal matrix.Suppose that such P exists. Now, notice that
A3 = AAA =
0 0 00 0 00 0 0
= 0R3,3
Since (P−1AP )3 = Λ3 and (P−1AP )3 = P−1APP−1APP−1AP = P−1A3P =0R3,3 then it must be Λ3 = 0R3,3 . Given that Λ is diagonal, this implies thatΛ = 0R3,3 . In fact, if
Λ =
x 0 00 y 00 0 z
then
Λ3 =
x3 0 00 y3 00 0 z3
41

and Λ3 = 0R3,3 implies x = y = z = 0.Now since P−1AP = Λ ⇔ A = PΛP−1, if Λ = 0R3,3 , then A = 0R3,3 whichcontradicts the hypothesis. Then, we have prove by contradiction that P cannotexist.
42