Embed Size (px)
Citation preview

Hamiltonian control systems
From modeling to analysis and control
Arjan van der SchaftJohann Bernoulli Institute for Mathematics and Computer Science,
University of Groningen, the Netherlands
Dimitri JeltsemaDelft Institute of Applied Mathematics,
Delft University of Technology, the Netherlands
Elgersburg School, March, 2012
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 1 /
108

Plan for the week
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 2 /
108

Plan for the week
Table of Contents for the Week
• Monday: definition of port-Hamiltonian systems and examples
• Tuesday: interconnection of port-Hamiltonian systems; properties ofport-Hamiltonian systems
• Wednesday: control by interconnection and passivity-based control
• Thursday: control case studies; relations with other modelingapproaches
• Friday: distributed-parameter port-Hamiltonian systems
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 3 /
108

Plan for the week
Today
• Basics of port-based modeling
• Dirac structures
• Definition of port-Hamiltonian systems
• Classes of port-Hamiltonian systems
Overall message:first principles physical modeling leads to a generalized Hamiltoniansystem description with lots of useful information for analysis andcontrol; for linear, nonlinear and infinite-dimensional systems.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 4 /
108

Basics of port-based modeling
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 5 /
108

Basics of port-based modeling
The basic elements
Port-based modeling is based on viewing the physical system as theinterconnection of ideal energy processing elements, all expressed in(vector) pairs of flow variables f ∈ F , and effort variables e ∈ E , where Fand E are linear spaces of equal dimension.Furthermore, there is a pairing between F and E defining the power
< e | f >
Canonical choice: E = F∗ with < e | f >= eT f .
• Energy-storing elements:
x = −f
e = ∂H∂x
(x)
• Energy-dissipating elements:
R(f , e) = 0, eT f ≤ 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 6 /
108

Basics of port-based modeling
The basic elements
• Energy-routing elements: generalized transformers, gyrators:
f1 = Mf2, e2 = −MT e1, f = Je, J = −JT
They are power-conserving:
eT f = 0
• Ideal interconnection constraints
0-junction :e1 = e2 = · · · = ek , f1 + f2 + · · ·+ fk = 01-junction :f1 = f2 = · · · = fk , e1 + e2 + · · ·+ ek = 0Ideal flow or effort constraints :f = 0, or e = 0
Also power-conserving:
e1f1 + e2f2 + · · ·+ ek fk = 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 7 /
108

Basics of port-based modeling
From power-conserving elements to Dirac structures
All power-conserving elements/interconnection constraints have thefollowing properties in common.They are described by linear equations:
Ff + Ee = 0, f , e ∈ Rℓ
satisfyingeT f = e1f1 + e2f2 + · · ·+ eℓfℓ = 0,
while furthermorerank
[F E
]= ℓ
All power-conserving elements/interconnection constraints will be groupedinto one geometric object: the Dirac structure.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 8 /
108

Basics of port-based modeling
Definition of Dirac structures
Definition
A (constant) Dirac structure is a subspace
D ⊂ F × E
such that
(i) eT f = 0 for all (f , e) ∈ D,
(ii) dimD = dimF .
For any skew-symmetric map J : E → F its graph given as(f , e) ∈ F × E | f = Je is a Dirac structure !
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 9 /
108

Basics of port-based modeling
Alternative definition of Dirac structure
Symmetrized form of power
< e | f >= eT f , (f , e) ∈ F × E .
is the indefinite bilinear form ≪,≫ on F × E :
≪(f a, ea), (f b, eb) ≫ := < ea | f b > + < eb | f a >,
(f a, ea), (f b, eb) ∈ F × E .
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 10 /
108

Basics of port-based modeling
Alternative definition of Dirac structure
Definition
A (constant) Dirac structure is a subspace
D ⊂ F × E
such thatD = D⊥⊥,
where ⊥⊥ denotes orthogonal complement with respect to the bilinear form≪,≫.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 11 /
108

Basics of port-based modeling
Towards port-Hamiltonian systems
Four-port model: Consider a Dirac structure D ⊂ F × E , where
f = (fS , fR , fI , fC ), e = (eS , eR , eI , eC )
S (storage)
R (resistive)
C (control)
I (interaction)
D
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 12 /
108

Definition of port-Hamiltonian systems
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 13 /
108

Definition of port-Hamiltonian systems
The port-Hamiltonian system is defined by closing the energy-storage andresistive ports by their constitutive relations
−x = fS ,∂H
∂x(x) = eS
respectivelyR(fR , eR) = 0
This leads to the DAEs
(−x(t), fR(t), fI (t), fC (t),∂H∂x
(x(t)), eR (t), eI (t), eC (t)) ∈ Dt ∈ R
R(fR(t), eR(t)) = 0
Thus DAEs of a special form, determined by the Dirac structure andenergy-conserving and energy-dissipating constitutive relations.Definition can be also extended to cover infinite-dimensional physicalsystems.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 14 /
108

Definition of port-Hamiltonian systems
Energy-balance
Power-conservation
eTS fS + eTR fR + eTI fI + eTC fC = 0
implies the energy-balance
dHdt(x(t)) = ∂H
∂x(x(t))x(t) =
eTR (t)fR(t) + eTI (t)fI (t) + eTC (t)fC (t) ≤
eTI (t)fI (t) + eTC (t)fC (t)
This implies that if the Hamiltonian H has a minimum at the equilibriumunder study, then it can be used as a Lyapunov function.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 15 /
108

Definition of port-Hamiltonian systems
Example (The ubiquitous mass-spring system)
Two storage elements:
• Spring Hamiltonian Hs(q) =12kq
2 (potential energy)
q = −fs = velocity
es = dHs
dq(q) = kq = force
• Mass Hamiltonian Hm(p) =12mp2 (kinetic energy)
p = −fm = force
em = dHm
dp(p) = p
m= velocity
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 16 /
108

Definition of port-Hamiltonian systems
Example
interconnected by the Dirac structure
fs = −em = −y , fm = es − u
(power-conserving since fses + fmem + uy = 0) yields the port-Hamiltoniansystem
[qp
]
=
[0 1−1 0
][∂H∂q
(q, p)∂H∂p
(q, p)
]
+
[01
]
u
y =[0 1
]
[∂H∂q
(q, p)∂H∂p
(q, p)
]
withH(q, p) = Hs(q) + Hm(p)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 17 /
108

Definition of port-Hamiltonian systems
Example (Electro-mechanical systems)
qpϕ
=
0 1 0−1 0 00 0 − 1
R
∂H∂q
(q, p, φ)∂H∂p
(q, p, φ)∂H∂ϕ
(q, p, φ)
+
001
V , I =∂H
∂ϕ(q, p, φ)
Coupling electrical/mechanical domain via Hamiltonian H(q, p, φ)
H(q, p, ϕ) = mgq +p2
2m+
ϕ2
2k1(1− qk2)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 18 /
108

Definition of port-Hamiltonian systems
Network modeling is prevailing in modeling and simulation oflumped-parameter physical systems (multi-body systems, electricalcircuits, electro-mechanical systems, hydraulic systems, robotic systems,etc.), with many advantages:
• Modularity and flexibility. Re-usability (‘libraries’).
• Multi-physics approach.
• Suited to design/control.
Disadvantage of network modeling: it generally leads to a large set ofDAEs, seemingly without any structure.
Port-based modeling and port-Hamiltonian system theory identifies theunderlying structure of network models of physical systems, to be used foranalysis, simulation and control.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 19 /
108

Definition of port-Hamiltonian systems
For many systems, especially those with 3-D mechanical components, theinterconnection structure will be modulated by the energy or geometricvariables.This leads to the notion of (non-constant) Dirac structures on manifolds.
Definition
Consider a smooth manifold M. A Dirac structure on M is a vectorsubbundle D ⊂ TM ⊕ T ∗M such that for every x ∈ M the vector space
D(x) ⊂ TxM × T ∗xM
is a Dirac structure as before.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 20 /
108

Definition of port-Hamiltonian systems
Example (Mechanical systems with kinematic constraints)
Constraints on the generalized velocities q:
AT (q)q = 0.
This leads to constrained Hamiltonian equations
q = ∂H∂p
(q, p)
p = −∂H∂q
(q, p) + A(q)λ+ B(q)f
0 = AT (q)∂H∂p
(q, p)
e = BT (q)∂H∂p
(q, p)
with H(q, p) total energy, and A(q)λ the constraint forces.Dirac structure is defined by the symplectic form on T ∗Q together withconstraints AT (q)q = 0 and force matrix B(q).
Can be systematically extended to general multi-body systems.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 21 /
108

Definition of port-Hamiltonian systems
Example (Rolling coin)
Let x , y be the Cartesian coordinates of the point of contact of the coinwith the plane. Furthermore, ϕ denotes the heading angle, and θ the angleof Queen Beatrix’ head (on the Dutch version of the euro). The rollingconstraints (rolling without slipping) are
x = θ cosϕ, y = θ sinϕ
The total energy is
H =1
2p2x +
1
2p2y +
1
2p2θ +
1
2p2ϕ
and the constraints can be rewritten as
px = pθ cosϕ, py = pθ sinϕ.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 22 /
108

Definition of port-Hamiltonian systems
Input-state-output port-Hamiltonian systems
Consider a Dirac structure D given as the graph of the skew-symmetricmap
[fSfC
]
=
[−J(x) −g(x)gT (x) 0
] [eSeC
]
,
leading (fS = −x , eS = ∂H∂x
(x)) to a port-Hamiltonian system as before
x = J(x)∂H∂x
(x) + g(x)eC , x ∈ X , eC ∈ Rm
fC = gT (x)∂H∂x
(x), fC ∈ Rm
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 23 /
108

Definition of port-Hamiltonian systems
Energy-dissipation is included by terminating some of the ports by linearresistive elements
fR = −R(eR), R = RT ≥ 0
Writing out
x = J(x)∂H
∂x(x) + gR(x)fR + g(x)eC , eR = gT
R (x)∂H
∂x(x)
this leads to an input-state-output port-Hamiltonian system given as
x = [J(x)− R(x)]∂H∂x
(x) + g(x)eC
fC = gT (x)∂H∂x
(x)
whereR(x) = gR(x)Rg
TR (x) ≥ 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 24 /
108

Definition of port-Hamiltonian systems
Multi-modal physical systems
Example (Bouncing pogo-stick)
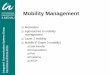
Consider a vertically bouncing pogo-stick consisting of a mass m and amassless foot, interconnected by a linear spring (stiffness k and rest-lengthx0) and a linear damper d .
m
kd
g
xy sum of forces
zero on foot
spring/damperin series
foot fixedto ground
spring/damperparallel
Figure: Model of a bouncing pogo-stick: definition of the variables (left), situationwithout ground contact (middle), and situation with ground contact (right).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 25 /
108

Definition of port-Hamiltonian systems
Example
The mass can move vertically under the influence of gravity g until thefoot touches the ground. The states of the system are x (length of thespring), y (height of the bottom of the mass), and p (momentum of themass, defined as p := my). Furthermore, the contact situation is describedby a variable s with values s = 0 (no contact) and s = 1 (contact). TheHamiltonian of the system equals
H(x , y , p) =1
2k(x − x0)
2 +mg(y + y0) +1
2mp2
where y0 is the distance from the bottom of the mass to its center of mass.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 26 /
108

Definition of port-Hamiltonian systems
Example
When the foot is not in contact with the ground total force on the foot iszero (since it is massless), which implies that the spring and damper forcemust be equal but opposite. When the foot is in contact with the ground,the variables x and y remain equal, and hence also x = y .For s = 0 (no contact) the system is described by the port-Hamiltoniansystem
ddt
[yp
]
=
[0 1−1 0
] [mgpm
]
−dx = k(x − x0)
while for s = 1 the port-Hamiltonian description is
d
dt
xyp
=
0 0 10 0 1−1 −1 −d
k(x − x0)mgpm
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 27 /
108

Definition of port-Hamiltonian systems
Example
The two situations can be taken together into one port-Hamiltoniansystem with variable Dirac structure:
d
dt
xyp
=
s−1d
0 s0 0 1−s −1 −sd
k(x − x0)mgpm
We obtain a switching port-Hamiltonian system, specified by a Diracstructure Ds depending on the switch position s ∈ 0, 1n (here n denotesthe number of independent switches).
Another interesting example is switching electrical circuits and powerconverters.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 28 /
108

Definition of port-Hamiltonian systems
Geometric definition of a port-Hamiltonian system
Consider a Dirac structure D ⊂ F × E , where
f = (fS , fR , fI , fC ), e = (eS , eR , eI , eC )
S (storage)
R (resistive)
C (control)
I (interaction)
D
(−x(t), fR(t), fI (t), fC (t),∂H∂x
(x(t)), eR (t), eI (t), eC (t)) ∈ D,
R(fR(t), eR(t)) = 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 29 /
108

Definition of port-Hamiltonian systems
Equational representations
Dirac structures, and therefore port-Hamiltonian systems, admit differentequational representations, with different properties for analysis,simulation, and control.Let D ⊂ F × F∗, with dimF = n, be a Dirac structure.
1. Kernel and Image representation
D = (f , e) ∈ F × F∗ | Ff + Ee = 0for n × n matrices F and E (possibly depending on x) satisfying
(i) EFT + FET = 0,
(ii) rank[F...E ] = n.
It follows that D can be also written in image representation asD = (f , e) ∈ F × F∗ | f = ETλ, e = FTλ, λ ∈ R
n.Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systems
Elgersburg School, March, 2012 30 /108

Definition of port-Hamiltonian systems
In case of the presence of an energy-conserving port S , anenergy-dissipating port R and an external port the Dirac structure D canthus be given in kernel representation as
D =
(fS , eS , fR , eR , f , e) ∈ X × X ∗ ×FR ×F∗R ×F × F∗ |
FS fS + ESeS + FR fR + EReR + Ff + Ee = 0
with
(i) ESFTS + FSE
TS + ERF
TR + FRE
TR + EFT + FET = 0
(ii) rank[FS | ES | FR | ER | F | E
]= dim(X × FR ×F)
Then the port-Hamiltonian system is given by the set of DAEs
FS x(t) = ES
∂H
∂x(x(t)) + FR fR(t) + EeR(t) + Ff (t) + Ee(t),
where the vectors fR , eR satisfy at all time-instants the energy-dissipatingconstitutive relations; e.g., fR(t) = ReR(t).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 31 /
108

Definition of port-Hamiltonian systems
2. Constrained input-output representationEvery Dirac structure D can be written as
D = (f , e) ∈ F × F∗ | f = Je + Gλ,GTe = 0
for a skew-symmetric matrix J and a matrix G such that
im G = f | (f , 0) ∈ D.
Furthermore, ker J = e | (0, e) ∈ D.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 32 /
108

Definition of port-Hamiltonian systems
In the absence of energy-dissipating and external ports it follows that anyport-Hamiltonian system can be represented as
x = J(x)∂H∂x
(x) + G (x)λ, J(x) = −JT (x)
0 = GT (x)∂H∂x
(x)
A typical example are mechanical systems with kinematic constraints
q = ∂H∂p
(q, p)
p = −∂H∂q
(q, p) + A(q)λ
0 = AT (q)∂H∂p
(q, p) (= AT (q)q)
where A(q)λ are the constraint forces.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 33 /
108

Definition of port-Hamiltonian systems
3. Hybrid input-output representationLet D be given by square matrices E and F as in 1. Suppose rankF = m(≤ n). Select m independent columns of F , and group them into a
matrix F1. Write (possibly after permutations) F = [F1...F2], and
correspondingly E = [E1...E2], f =
[f1f2
]
, e =
[e1e2
]
.
Then the matrix [F1...E2] is invertible, and
D =
[f1f2
]
,
[e1e2
] ∣∣∣∣
[f1e2
]
= J
[e1f2
]
with J := −[F1...E2]
−1[F2...E1] skew-symmetric.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 34 /
108

Definition of port-Hamiltonian systems
From one representation to another
In principle we can freely move from one representation to another.For example, consider a linear port-Hamiltonian system, withoutenergy-dissipating and external ports. This can be always written as
x = JQx + Gλ, J = −JT ,Q = QT
0 = GTQx , H(x) = 12x
TQx
The constraint forces Gλ can be eliminated by pre-multiplying the firstequation by the annihilating matrix G⊥, leading to the DAE system (inkernel representation)
[G⊥
0
]
x =
[G⊥JGT
]
Qx
The corresponding pencil
s
[G⊥
0
]
−[G⊥JQGTQ
]
is non-singular if GTQG has full rank, and in fact, the system has indexone if and only if GTQG has full rank.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 35 /
108

Definition of port-Hamiltonian systems
More explicitly, define the coordinate transformation (assuming w.l.o.g.that G has full rank)
z =
[G⊥
GT
]
x =: Vx
This leads to the transformed system
z = (VJV T )(V−TQV−1)(Vx) + VGλ = JQz +
[0
GTG
]
λ
0 = GTQx =[0 GTG
]Qz
Since GTG has full rank, this means that the constraint amounts to
(Qz)2 = 0, where Qz =
[(Qz)1(Qz)2
]
.
Hence the system reduces to the Hamiltonian differential equations
z1 = J11(Q11 − Q12Q−122 Q21)z1
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 36 /
108

Definition of port-Hamiltonian systems
In general, port-Hamiltonian systems will have generally index one.Consider the nonlinear port-Hamiltonian system
x = J(x)∂H∂x
(x) + G (x)λ, J(x) = −JT (x)
0 = GT (x)∂H∂x
(x)
Then differentiation of the algebraic constraints yields
0 =d
dtGT (x)
∂H
∂x(x) = · · ·+ GT (x)
∂2H
∂x2(x)G (x)λ,
which can be solved for λ as long as the rank of
GT (x)∂2H
∂x2(x)G (x)
is equal to the rank of G (x).
In particular if the Hessian ∂2H∂x2
(x) is invertible, then the system has indexone.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 37 /
108

Definition of port-Hamiltonian systems
Canonical coordinates
Any constant Dirac structure D ⊂ F × F∗ can be represented as follows.There exist linear coordinates x = (q, p, r , s) for F (with dim q = dim p),such that in the corresponding bases for (fq, fp , fr , fs) for TxF and(eq , ep , er , es) for F∗, the Dirac structure is given as
fq = −epfp = eqfr = 0es = 0
In such canonical coordinates a port-Hamiltonian system on X = Fwithout energy-dissipating and external ports can be written as
q = ∂H∂p
(q, p, r , s)
p = −∂H∂q
(q, p, r , s)
r = 0
0 = ∂H∂s
(q, p, r , s)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 38 /
108

Definition of port-Hamiltonian systems
Excursion to integrability
A Dirac structure on a manifold X is integrable if it is possible to findlocal coordinates such that, in these coordinates, the Dirac structurebecomes a constant Dirac structure, that is, it is not modulated anymoreby the state variables.Thus then there also exist canonical coordinates.
First case
Let the modulated Dirac structure D be given for every x ∈ X as thegraph of a skew-symmetric mapping J(x) from the co-tangent space T ∗
xXto the tangent space TxX . Integrability in this case means that J(x)satisfies the conditions
n∑
l=1
[
Jlj(x)∂Jik∂xl
(x) + Jli (x)∂Jkj∂xl
(x) + Jlk(x)∂Jji∂xl
(x)
]
= 0, i , j , k = 1, . . . , n
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 39 /
108

Definition of port-Hamiltonian systems
In this case we may find, by Darboux’s theorem around any point x0 wherethe rank of the matrix J(x) is constant, local canonical coordinatesx = (q, p, r) in which the matrix J(x) becomes the constantskew-symmetric matrix
0 −Ik 0Ik 0 00 0 0
Then J(x) defines a Poisson bracket on X , given for every F ,G : X → R
as
F ,G =∂TF
∂xJ(x)
∂G
∂x
Indeed, by the integrability condition the Jacobi-identity holds:
F , G ,K + G , K ,F + K , F ,G = 0
for all functions F ,G ,K .
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 40 /
108

Definition of port-Hamiltonian systems
Second case
A similar story holds for a Dirac structure given as the graph of askew-symmetric mapping ω(x) from the tangent space TxX to theco-tangent space T ∗
x X . In this case the integrability conditions take theform
∂ωij
∂xk(x) +
∂ωki
∂xj(x) +
∂ωjk
∂xi(x) = 0, i , j , k = 1, . . . , n
The skew-symmetric matrix ω(x) can be regarded as the coordinaterepresentation of a differential two-form ω on X , that isω =
∑ni=1,j=1 dxi ∧ dxj , and the integrability condition corresponds to the
closedness of this two-form (dω = 0).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 41 /
108

Definition of port-Hamiltonian systems
The differential two-form ω is called a pre-symplectic structure, and asymplectic structure if the rank of ω(x) is equal to the dimension of X . Bya version of Darboux’s theorem we may find, around any point x0 wherethe rank of the matrix ω(x) is constant, local coordinates x = (q, p, s) inwhich the matrix ω(x) becomes the constant skew-symmetric matrix
0 Ik 0−Ik 0 00 0 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 42 /
108

Definition of port-Hamiltonian systems
For general Dirac structures, integrability is defined as
Definition
A Dirac structure D on X is integrable if for arbitrary pairs of smoothvector fields and differential one-forms (X1, α1), (X2, α2),(X3, α3) ∈ Dthere holds
< LX1α2 | X3 > + < LX2
α3 | X1 > + < LX3α1 | X2 >= 0
with LXidenoting the Lie-derivative.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 43 /
108

Definition of port-Hamiltonian systems
The Dirac structure corresponding to mechanical systems with kinematicconstraints
D = (fq , fp, eq , ep) | fq = −ep, fp = eq + A(q)λ,AT (q)ep = 0
is integrable if and only if the kinematic constraints
AT (q)q = 0
are holonomic, which means that it is possible to find configurationcoordinates q = (q1, . . . , qn) such that the constraints are equivalentlyexpressed as
qn−k+1 = qn−k+2 = · · · = qn = 0 ,
In this case one may eliminate the configuration variables qn−k+1, . . . , qn,since the kinematic constraints are equivalent to the geometric constraints
qn−k+1 = cn−k+1, . . . , qn = cn ,
for certain constants cn−k+1, . . . , cn determined by the initial conditions.Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systems
Elgersburg School, March, 2012 44 /108

Scattering: from power variables to wave variables
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 45 /
108

Scattering: from power variables to wave variables
Scattering representations
Main idea: Use in the total space of port-variables F × F∗ a differentsplitting than the ’canonical’ duality splitting (in flows f ∈ F and effortse ∈ F∗).Consider the canonical bilinear form
≪ (f1, e1), (f2, e2) ≫=< e1 | f2 > + < e2 | f1 >, (fi , ei ) ∈ F×F∗, i = 1, 2,
on F × F∗. This is an indefinite bilinear form, which has n singular values+1 and n singular values −1 (n = dimF).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 46 /
108

Scattering: from power variables to wave variables
A pair of subspaces Σ+,Σ− ⊂ F × F∗ is a pair of scattering subspaces if
(i) Σ+ ⊕ Σ− = F × F∗
(ii) ≪ σ+1 , σ
+2 ≫> 0 for all σ+
1 , σ+2 ∈ Σ+ unequal to 0.
≪ σ−1 , σ
−2 ≫< 0 for all σ−
1 , σ−2 ∈ Σ− unequal to 0.
(iii) ≪ σ+, σ− ≫= 0 for all σ+ ∈ Σ+, σ− ∈ Σ−.
It is readily seen that any pair of scattering subspaces (Σ+,Σ−) satisfies
dimΣ+ = dimΣ− = dimF
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 47 /
108

Scattering: from power variables to wave variables
The collection of pairs of scattering subspaces can be characterized asfollows.
Lemma
Let (Σ+,Σ−) be a pair of scattering subspaces. Then there exists aninvertible linear map
R : F → F∗
with< (R + R∗)f |f > > 0, for all 0 6= f ∈ F ,
such thatΣ+ := (R−1e, e) ∈ F × F∗ | e ∈ F∗
Σ− := (−f ,R∗f ) ∈ F × F∗ | f ∈ FConversely, for any invertible linear map R : F → F∗ the pair (Σ+,Σ−) isa pair of scattering subspaces.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 48 /
108

Scattering: from power variables to wave variables
Let (Σ+,Σ−) be a pair of scattering subspaces. Then every pair of powervectors (f , e) ∈ F × F∗ can be represented as
(f , e) = σ+ + σ−
for a uniquely defined σ+ ∈ Σ+, σ− ∈ Σ−, called the wave vectors. Usingorthogonality of Σ+ w.r.t. Σ− for all (fi , ei ) = σ+
i + σ−i , i = 1, 2
≪ (f1, e1), (f2, e2) ≫=
< σ+1 , σ
+2 >Σ+ − < σ−
1 , σ−2 >Σ−
where <,>Σ+ is the restriction of ≪,≫ to Σ+, and <,>Σ− is minus therestriction of ≪,≫ to Σ−.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 49 /
108

Scattering: from power variables to wave variables
Taking f1 = f2 = f , e1 = e2 = e, and thusσ+1 = σ+
2 = σ+, σ−1 = σ−
2 = σ−, leads to
< e | f >= 12 ≪ (f , e), (f , e) ≫=
12 < σ+, σ+ >Σ+ −1
2 < σ−, σ− >Σ−
This yields the following interpretation of the wave vectors: The vector σ+
can be regarded as the incoming wave vector, with half times its normbeing the incoming power, and the vector σ− is the outgoing wave vector,with half times its norm being the outgoing power.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 50 /
108

Scattering: from power variables to wave variables
Let D ⊂ F × F∗ be a Dirac structure, that is, D = D⊥⊥ with respect to≪,≫. What is its representation in wave vectors ?Since ≪,≫ is zero restricted to D it follows that for every pair ofscattering subspaces (Σ+,Σ−)
D ∩ Σ+ = 0, D ∩ Σ− = 0,
and hence D can be represented as the graph of an invertible linear mapO : Σ+ → Σ−, that is,
D = (σ+, σ−) | σ− = Oσ+, σ+ ∈ Σ+
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 51 /
108

Scattering: from power variables to wave variables
Furthermore< σ+
1 , σ+2 >Σ+=< Oσ+
1 ,Oσ+2 >
for every σ+1 , σ
+2 ∈ Σ+, and thus
O : (Σ+, <,>Σ+) → (Σ−, <,>Σ−)
is a unitary map (isometry).Conversely, every unitary map O as above defines a Dirac structure. Thusfor every pair of scattering subspaces (Σ+,Σ−) we have a one-to-onecorrespondence between unitary maps and Dirac structures D ⊂ F ×F∗.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 52 /
108

Scattering: from power variables to wave variables
Inner product scattering representations
A particular useful class of scattering subspaces (Σ+,Σ−) are thosedefined by an invertible map R : F → F∗ such that R = R∗. In this caseR is determined by the inner product on F defined as
< f1, f2 >R :=< Rf1 | f2 >=< Rf2 | f1 >
or equivalently by the inner product on F∗
< e1, e2 >R−1 :=< e2 | R−1f1 >=< e1 | R−1f2 >
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 53 /
108

Scattering: from power variables to wave variables
Define for every (f , e) ∈ F × F∗ the pair (s+, s−) by
s+ := 1√2(e + Rf ) ∈ F∗
s− := 1√2(e − Rf ) ∈ F∗
Let (s+i , s−i ) correspond to (fi , ei ), i = 1, 2.
2 < s+1 , s+2 >R−1 = < e1, e2 >R−1 + < f1, f2 >R
+ ≪ (f1, e1), (f2, e2) ≫
2 < s−1 , s−2 >R−1 = < e1, e2 >R−1 + < f1, f2 >R
− ≪ (f1, e1), (f2, e2) ≫
Hence, if (fi , ei ) ∈ Σ+, or equivalently s−i = ei − Rfi = 0, then2 < s+1 , s+2 >R−1= 2 ≪ (f1, e1), (f2, e2) ≫, while if (fi , ei ) ∈ Σ−, orequivalently s+i = ei + Rfi = 0, then2 < s−1 , s−2 >R−1= −2 ≪ (f1, e1), (f2, e2) ≫ .
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 54 /
108

Scattering: from power variables to wave variables
Thus the mappings
σ+ = (f , e) ∈ Σ+ 7−→ s+ = 1√2(e + Rf ) ∈ F∗
σ− = (f , e) ∈ Σ− 7−→ s− = 1√2(e − Rf ) ∈ F∗
are isometries (with respect to the inner products on Σ+ and Σ−, and theinner product on F∗). Hence we may identify the wave vectors (σ+, σ−)with (s+, s−).
Remark Note that the pair of scattering subspaces (Σ+,Σ−)corresponding to R may be characterized as
Σ+ = (f , e) ∈ F × F∗| ≪ (f , e), (f , e) ≫=< e, e >R−1 + < f , f >R
Σ− = (f , e) ∈ F × F∗| ≪ (f , e), (f , e) ≫= − < e, e >R−1 − < f , f >R
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 55 /
108

Scattering: from power variables to wave variables
Representation of a Dirac structure in terms of the wave
vectors
. For every Dirac structure D ⊂ F × F∗ there exist linear mappingsF : F → V and E : F∗ → V satisfying
(i) EF ∗ + FE ∗ = 0,
(ii) rank (F + E ) = dimF ,
where V is a linear space with the same dimension as F . Thus for any(f , e) ∈ D the wave vectors (s+, s−) are given as
s+ = 1√2(F ∗λ+ RE ∗λ) = 1√
2(F ∗ + RE ∗)λ
s− = 1√2(F ∗λ− RE ∗λ) = 1√
2(F ∗ − RE ∗)λ, λ ∈ V∗
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 56 /
108

Scattering: from power variables to wave variables
It follows thats− = (F ∗ − RE ∗)(F ∗ + RE ∗)−1s+
Hence the unitary map O : F∗ → F∗ is given as
O = (F ∗ − RE ∗)(F ∗ + RE ∗)−1 = (FR−1 − E )−1(FR−1 + E )
satisfyingO∗R−1O = R−1
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 57 /
108

Port-Hamiltonian systems and passivity
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 58 /
108

Port-Hamiltonian systems and passivity
Passivity
A square nonlinear system
Σ :x = f (x) + g(x)u, u ∈ R
m
y = h(x), y ∈ Rm
where x ∈ Rn are coordinates for an n-dimensional state space X , is
passive if there exists a storage function V : X → R withV (x) ≥ 0 for every x , such that
V (x(t2))− V (x(t1)) ≤∫ t2
t1
yT (t)u(t)dt
for all solutions (u(·), x(·), y(·)) and times t1 ≤ t2.The system is lossless if ≤ is replaced by =.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 59 /
108

Port-Hamiltonian systems and passivity
If H is differentiable then being passive is equivalent to
d
dtV ≤ yTu
which reduces to (Willems, Hill-Moylan)
∂TV∂x
(x)f (x) ≤ 0
h(x) = gT (x)∂V∂x
(x)
while in the lossless case ≤ is replaced by =.In the linear case
x = Ax + Buy = Cx
is passive if there exists a quadratic storage function V (x) = 12x
TQx ,with Q = QT ≥ 0 satisfying the LMIs
ATQ + QA ≤ 0, C = BTQ
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 60 /
108

Port-Hamiltonian systems and passivity
Clearly, any port-Hamiltonian system with Hamiltonian H ≥ 0 is passive,since
d
dtH = −eTR fR + eTC fC ≤ eTC fC
and thus H is a storage function. Furthermore, if there are nopower-dissipating elements R , then a port-Hamiltonian system with H ≥ 0is lossless.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 61 /
108

Port-Hamiltonian systems and passivity
From passive to port-Hamiltonian in the linear case
Fixing a particular storage matrix Q > 0 and defining J to be theskew-symmetric part of the matrix AQ−1 and −R its symmetric part, thesystem can be written as the port-Hamiltonian system
x = [J − R ]Qx + Bu
y = BTQx
whereJ = −JT , R = RT ≥ 0
Thus there are different port-Hamiltonian realizations of the same passivesystem.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 62 /
108

Port-Hamiltonian systems and passivity
Similarly, most nonlinear passive systems can be written as aport-Hamiltonian system (with dissipation)
x = [J(x) − R(x)]∂H∂x
(x) + g(x)u
y = gT (x)∂H∂x
(x)
with R(x) = RT (x) ≥ 0 specifying the energy dissipation
d
dtH = −∂TH
∂x(x)R(x)
∂H
∂x(x) + uT y ≤ uT y
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 63 /
108

Other properties of port-Hamiltonian systems
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 64 /
108

Other properties of port-Hamiltonian systems
Casimirs and Algebraic Constraints
Define the smooth distributions
G0 := X ∈ TX | (X , 0) ∈ D
G1 := X ∈ TX | ∃α ∈ T ∗X s.t. (X , α) ∈ Dand the smooth co-distributions
P0 := α ∈ T ∗X | (0, α) ∈ D
P1 := α ∈ T ∗X | ∃X ∈ TX s.t. (X , α) ∈ D
Clearly, G0 ⊂ G1, P0 ⊂ P1, while by D = D⊥ one obtains
G0 = ker P1
P0 = annG1
If D is integrable, then the (co-)distributions G0,G1,P0,P1 are allinvolutive.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 65 /
108

Other properties of port-Hamiltonian systems
Casimirs and Algebraic Constraints
Definition
Let X be a manifold with Dirac structure D, and let H : X → R be asmooth function (the Hamiltonian). The Hamiltonian systemcorresponding to (X ,D,H) is given as
(−x , dH(x)) ∈ D(x), x ∈ X
The Casimirs are defined as all functions C : X → R such that dC ∈ P0.Indeed, this means that
< dC | f >= 0
for all f ∈ G1; i.e., along al possible evolutions of the system.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 66 /
108

Other properties of port-Hamiltonian systems
Algebraic constraints
In general (−x , dH(x)) ∈ D(x) induces algebraic constraints on the statevariables, leading to the constrained state space
Xc = x ∈ X | ∃f s.t. (f , dH(x)) ∈ D(x)
Throughout we assume that this defines a smooth submanifold. Thisconstrained state space is determined by the Hamiltonian H and by theco-distribution P1 (or, equivalently, the distribution G0).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 67 /
108

Other properties of port-Hamiltonian systems
Symmetries and conserved quantities
Definition
Let D be a Dirac structure on X . A vector field f on X is an infinitesimalsymmetry of D (briefly, a symmetry of D) if
(Lf X , Lf α) ∈ D, for all (X , α) ∈ D
Analogously we say that a diffeomorphism ϕ : X → X is a symmetry of Dif
(ϕ−1∗ X , ϕ∗α
)∈ D, for all (X , α) ∈ D
Theorem
Let f be a symmetry of the Dirac structure D, with associateddistributions G0,G1 and co-distributions P0,P1. Then
Lf Gi ⊂ Gi , Lf Pi ⊂ Pi , i = 0, 1
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 68 /
108

Other properties of port-Hamiltonian systems
We have the following analog of the statement that any Hamiltonianvector field is a symmetry for the symplectic form:
Theorem
Let D be a closed Dirac structure on X . Let f be a vector field on X forwhich there exists a smooth function F : X → R such that (f , dF ) ∈ D.Then f is a symmetry of D.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 69 /
108

Other properties of port-Hamiltonian systems
Noether type of result on the existence of conserved quantities:
Theorem
Let (X ,D,H) be a Hamiltonian system. Let f be a vector field on X forwhich there exists a smooth function F such that
(f (x), dF (x)) ∈ D(x), x ∈ Xc
Furthermore, let f be a symmetry for H on Xc , that is
Lf H(x) = 0, x ∈ Xc
Then LXHc(F ) = 0 on Xc , where Hc is the Hamiltonian H restricted to Xc .
Thus F is a conserved quantity for XHcon Xc .
Proof Because of D = D⊥ we have
< dH(x) | f (x) > + < dF (x) | XHc(x) >= 0, x ∈ Xc ,
since (f (x), dF (x)) ∈ D(x), x ∈ Xc , and (XHc(x), dH(x)) ∈ D(x), x ∈ Xc ,
by construction.Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systems
Elgersburg School, March, 2012 70 /108

Other properties of port-Hamiltonian systems
Consider a symmetry Lie group G of the Dirac structure D; that is, the Liegroup G acts on X by diffeomorphisms Φg : X → X , g ∈ G , and Φg is asymmetry of D for every g ∈ G . Equivalently, for every ξ ∈ g (the Liealgebra of G ) the infinitesimal generator Xξ of the group action is an(infinitesimal) symmetry of D. Throughout assume that the quotientspace X := X/G of G -orbits on X is a manifold with smooth projectionmap ρ : X → X . Then the Dirac structure D reduces to X as follows.
Theorem
Let G be a symmetry Lie group of the generalized Dirac structure D onX , with quotient manifold X and smooth projection ρ : X → X . Thenthere exists a reduced Dirac structure D on X , defined as
(X , α) ∈ D if ∃X with ρ∗X = X s.t. (X , α) ∈ D, where α = ρ∗α
Furthermore, if D is integrable, then so is D.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 71 /
108

Other properties of port-Hamiltonian systems
Theorem
Let (X ,D,H) be a Hamiltonian system. Let G be a symmetry Lie groupof the Dirac structure D on X , with quotient manifold X , smoothprojection ρ : X → X , and reduced Dirac structure D on X . Furthermore,suppose the action of G on X leaves H invariant, leading to a reducedHamiltonian H : X → R such that H = H ρ. Then the Hamiltoniansystem (X ,D,H) projects to the Hamiltonian system (X , D, H).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 72 /
108

Other properties of port-Hamiltonian systems
Interconnection port-Hamiltonian systems, and
composition of Dirac structures
The composition of two Dirac structures with partially shared variables isagain a Dirac structure:
D12 ⊂ V1 × V∗1 × V2 × V∗
2
D23 ⊂ V2 × V∗2 × V3 × V∗
3
F1
F∗1
F2
F∗2
F3
F∗3
DA DB
︸ ︷︷ ︸
DA||DBFigure: Composed Dirac structure
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 73 /
108

Other properties of port-Hamiltonian systems
Af2
Ae2
DA
DB
1f 3
f
1e 3
e
Bf2
Be2
Figure: Standard interconnection
f A2 = −f B2 ∈ F2
eA2 = eB2 ∈ F∗2
The gyrating (or feedback) interconnection
f A2 = −eB2eB2 = f B2
can be easily transformed to this case.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 74 /
108

Other properties of port-Hamiltonian systems
Thus
DA ‖ DB := (f1, e1, f3, e3) ∈ F1 ×F∗1 ×F3 ×F∗
3 | ∃(f2, e2) ∈ F2 ×F∗2
such that
(f1, e1, f2, e2) ∈ DA and (−f2, e2, f3, e3) ∈ DB
Theorem
Let DA, DB be Dirac structures (defined with respect toF1 ×F∗
1 ×F2 ×F∗2 , respectively F2 ×F∗
2 ×F3 ×F∗3 and their bilinear
forms). Then DA ‖ DB is a Dirac structure with respect to the bilinearform on F1 ×F∗
1 ×F3 ×F∗3 .
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 75 /
108

Other properties of port-Hamiltonian systems
Proof
Consider DA, DB defined in kernel representation by
DA =(f1, e1, fA, eA) ∈ F1 ×F∗
1 ×F2 ×F∗2 |F1f1 + E1e1 + F2AfA + E2AeA = 0
DB =(fB , eB , f3, e3) ∈ F2 ×F∗
2 ×F3 ×F∗3 |F2B fB + E2BeB + F3f3 + E3e3 = 0
Make use of the following basic fact from linear algebra:
(∃λ s.t. Aλ = b) ⇔ [∀α s.t. αTA = 0 ⇒ αTb = 0]
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 76 /
108

Other properties of port-Hamiltonian systems
Note that DA, DB are alternatively given in matrix image representation as
DA = im
ET1
FT1
ET2A
FT2A
00
DB = im
00
ET2B
FT2B
ET3
FT3
Hence, (f1, e1, f3, e3) ∈ DA ‖ DB ⇔ ∃λA, λB such that
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 77 /
108

Other properties of port-Hamiltonian systems
f1e100f3e3
=
ET1 0
FT1 0
ET2A ET
2B
FT2A −FT
2B
0 FT3
0 ET3
[λA
λB
]
⇔
⇔ ∀(β1, α1, β2, α2, β3, α3) s.t.
(βT1 αT
1 βT2 αT
2 βT3 αT
3 )
ET1 0
FT1 0
ET2A ET
2B
FT2A −FT
2B
0 FT3
0 ET3
= 0,
βT1 f1 + αT
1 e1 + βT3 f3 + αT
3 e3 = 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 78 /
108

Other properties of port-Hamiltonian systems
Explicit expressions for the composition
The composition of DA with DB is given by
[F1 E1 F2A E2A 0 00 0 −F2B E2B F3 E3
]
f1e1f2e2f3e3
= 0,
Define
M =
[F2A E2A
−F2B E2B
]
and let LA, LB be matrices with
L = [LA|LB ] , ker L = imM
Premultiplication of the equations by the matrix L := [LA|LB ] results inLAF1f1 + LAE1e1 + LBF3f3 + LBE3e3 = 0
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 79 /
108

Other properties of port-Hamiltonian systems
Consequence
The interconnection of a number of port-Hamiltonian systems(Xi ,Di ,Hi ), i = 1, · · · , k , through an interconnection Dirac structure DI isa port-Hamiltonian system (X ,D,H), with
H = H1 + · · · + Hk ,
X = X1 × · · · × Xk
and D the composition of D1, · · · ,Dk ,DI .
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 80 /
108

Distributed parameter port-Hamiltonian systems
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 81 /
108

Distributed parameter port-Hamiltonian systems
How to deal with infinite-dimensional components ?
Want to deal with multi-physics systems also incorporatingdistributed-parameter (infinite-dimensional) components:
1. Power-converter connected to an electrical machine via a transmissionline2. Electrical power-networks including generators and dynamic loads3. Hydraulic networks with pipes4. Multi-body systems with flexible componentsetc.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 82 /
108

Distributed parameter port-Hamiltonian systems
Distributed parameter port-Hamiltonian systems
fa
ea
fb
eb
a b
Figure: Simplest example: Transmission line
Telegrapher’s equations define the boundary control system
∂Q∂t
(z , t) = − ∂∂zI (z , t) = − ∂
∂zφ(z ,t)L(z)
∂φ∂t(z , t) = − ∂
∂zV (z , t) = − ∂
∂zQ(z ,t)C(z)
fa(t) = V (a, t), ea(t) = I (a, t)fb(t) = V (b, t), eb(t) = I (b, t)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 83 /
108

Distributed parameter port-Hamiltonian systems
Transmission line as port-Hamiltonian system
Define internal flows fS = (fE , fM) and efforts eS = (eE , eM):
electric flow fE : [a, b] → R
magnetic flow fM : [a, b] → R
electric effort eE : [a, b] → R
magnetic effort eM : [a, b] → R
together with external (boundary) flows f = (fa, fb) and boundary effortse = (ea, eb). Define the infinite-dimensional subspace of(C∞[a, b])2 × (C∞[a, b])2 × R
2 × R2 by the equations
[fEfM
]
=
[0 ∂
∂z∂∂z
0
] [eEeM
]
[faea
]
=
[eE (a)eM(a)
]
,
[fbeb
]
=
[eE (b)eM(b)
]
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 84 /
108

Distributed parameter port-Hamiltonian systems
This defines a Dirac structure:
Use integration by parts
For any (fE , fM , eE , eM , fa, fb, ea, eb) ∈ D∫ b
aeE (z)fE (z) + eM(z)fM(z)− ebfb + eafa =
∫ b
aeE (z)
∂∂zeM(z) + eM(z) ∂
∂zeE (z)− ebfb + eafa =
∫ b
a[−eM(z) ∂
∂zeE (z) + ebfb − eafa] + eM(z) ∂
∂zeE (z)− ebfb + eafa = 0
Thus eT f = 0 for all (f , e) ∈ D. However, in general this implies that forall (f1, e1), (f2, e2) ∈ D
0 = (e1 + e2)T (f1 + f2) = eT1 f1 + eT2 f2 + eT1 f2 + eT2 f1 =
eT1 f2 + eT2 f1 =≪ (f1, e1), (f2, e2) ≫
Hence D ⊂ D⊥⊥.Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systems
Elgersburg School, March, 2012 85 /108

Distributed parameter port-Hamiltonian systems
Still need to show that D⊥⊥ ⊂ D :
Let (fE , fM , eE , eM , fa, ea, fb, eb) ∈ D⊥⊥, that is
0 =∫ b
aeE fE + eE fE + eM fM + eM fM+
−ebfb − eb fb + eafa + ea fa
for all (fE , fM , eE , eM , fa, ea, fb, eb) ∈ D.Take first fa = ea = fb = eb = 0. Then
0 =
∫ b
a
eE∂
∂zeM + eE fE + eM
∂
∂zeE + eM fM
for all such (eE , eM). This implies
fE =∂
∂zeM , fM =
∂
∂zeE
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 86 /
108

Distributed parameter port-Hamiltonian systems
Substitution yields
0 =∫ b
aeE
∂∂zeM + eE
∂∂zeM + eM
∂∂zeE + eM
∂∂zeE
−ebfb − eb fb + eafa + ea fa
which implies
eE (b)eM(b) + eM(b)eE (b)− eE (a)eM(a)− eM(a)eE (a)
−ebfb − eb fb + eafa + ea fa = 0
for all fa = eE (a), fb = eE (b), ea = eM(a), eb = eM(b). This yields
eb = eM(b), fb = eE (b), ea = eM(a), fa = eE (a)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 87 /
108

Distributed parameter port-Hamiltonian systems
Telegrapher’s equations as port-Hamiltonian system
Substituting (as in the lumped-parameter case)
fE = −∂Q∂t
fM = −∂ϕ∂t
fS = −x
eE = QC
= ∂H∂Q
eM = ϕL= ∂H
∂ϕ
eS =
∂H
∂x
with, for example, quadratic energy density
H(Q, ϕ) =1
2
Q2
C+
1
2
ϕ2
L
we recover the telegrapher’s equations.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 88 /
108

Distributed parameter port-Hamiltonian systems
Energy-balance
ddt
∫ b
a12Q2(z)C
+ 12ϕ2(z)L
dz = −∫ b
aeE (z)fE (z) + eM(z)fM(z)dz =
−ebfb + eafa = −I (b, t)V (b, t) + I (a, t)V (b, t)
Remark
Of course, the telegrapher’s equations can be rewritten as the linear waveequation
∂2Q∂t2
= − ∂∂z
∂I∂t
= − ∂∂z
∂∂t
φL=
− ∂∂z
1L∂φ∂t
= ∂∂z
1L
∂∂z
QC= 1
LC∂2Q∂z2
(provided L(z),C (z) do not depend on z), or similar expressions in φ, I orV .
The same equations hold for a vibrating string, or for a compressiblegas/fluid in a one-dimensional pipe.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 89 /
108

Distributed parameter port-Hamiltonian systems
Shallow water equations; distributed-parameter
port-Hamiltonian system with non-quadratic Hamiltonian
The dynamics of the water in an open-channel canal can be described by
∂t
[hv
]
+
[v hg v
]
∂z
[hv
]
= 0
with h(z , t) the height of the water at position z , and v(z , t) the velocity(and g gravitational constant).This can be written as a port-Hamiltonian system by recognizing the totalenergy
H(h, v) =1
2
∫ b
a
[hv2 + gh2]dz
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 90 /
108

Distributed parameter port-Hamiltonian systems
yielding the co-energy functions1
eh = ∂H∂h
= 12v
2 + gh Bernoulli function
ev = ∂H∂v
= hv mass flow
It follows that the shallow water equations can be written, similarly to thetelegrapher’s equations, as
∂h∂t(z , t) = − ∂
∂z∂H∂v
∂v∂t(z , t) = − ∂
∂z∂H∂h
with boundary variables −hv|a,b and (12v2 + gh)|a,b.
1Daniel Bernoulli, born in 1700 in Groningen as son of Johann Bernoulli, professor inmathematics at the University of Groningen and pioneer of the Calculus of Variations(the Brachistochrone problem).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 91 /
108

Distributed parameter port-Hamiltonian systems
Paying tribute to history:
Figure: Johann Bernoulli, professor in Groningen 1695-1705.
Figure: Daniel Bernoulli, born in Groningen in 1700.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 92 /
108

Distributed parameter port-Hamiltonian systems
We obtain the energy balance
d
dt
∫ b
a
[hv2 + gh2]dz = −(hv)(1
2v2 + gh)|ba
which can be rewritten as
−v(12gh2)|ba − v(12hv
2 + 12gh
2))|ba =
velocity × pressure + energy flux through the boundary
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 93 /
108

Distributed parameter port-Hamiltonian systems
Conservation laws
All examples sofar have the same structure
∂α1∂t
(z , t) = − ∂∂z
∂H∂α2
= − ∂∂zβ2
∂α2∂t
(z , t) = − ∂∂z
∂H∂α1
= − ∂∂zβ1
with boundary variables β1|a,b, β2|a,b, corresponding to two coupledconservation laws:
ddt
∫ b
aα1 = −
∫ b
a∂∂zβ2 = β2(a)− β2(b)
ddt
∫ b
aα2 = −
∫ b
a∂∂zβ1 = β1(a)− β1(b)
(In the transmission line, α1 and α2 is charge- and flux-density, and β1, β2voltage V and current I , respectively.)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 94 /
108

Distributed parameter port-Hamiltonian systems
For some purposes it is illuminating to rewrite the equations in terms ofthe co-energy variables β1, β2:
∂β1
∂t
∂β2
∂t
=
∂2H∂α2
1
∂2H∂α1α2
∂2H∂α2α1
∂2H∂α2
2
∂α1∂t
∂α2∂t
= −
∂2H∂α2
1
∂2H∂α1α2
∂2H∂α2α1
∂2H∂α2
2
∂β2
∂z
∂β1
∂z
For the transmission line this yields
[∂V∂t
∂I∂t
]
= −[0 1
C
1L
0
][∂V∂z
∂I∂z
]
The matrix is called the characteristic matrix, whose eigenvalues are thecharacteristic velocities 1√
LCand − 1√
LCcorresponding to the
characteristic eigenvectors (and curves).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 95 /
108

Distributed parameter port-Hamiltonian systems
For the shallow water equations this yields
[∂β1∂t
∂β2∂t
]
= −[v g
h v
][∂β1∂z
∂β2∂z
]
with
β1 =1
2v2 + gh, β2 = hv
being the Bernoulli function and mass flow, respectively.This corresponds to two characteristic velocities v ±
√gh, which are, like
in the transmission line case, of opposite sign (subcritical or fluvial flow) if
v2 ≤ gh
Because the Hamiltonian is non-quadratic, and thus the pde’s arenonlinear, the characteristic curves may intersect, corresponding to shockwaves.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 96 /
108

Distributed parameter port-Hamiltonian systems
Higher-dimensional spatial domain
Electromagnetic Field: Maxwell’s equations
∂D∂t
= curl H, E = ǫ−1D Faraday
∂B∂t
= − curl E , H = µ−1B Ampere
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 97 /
108

Distributed parameter port-Hamiltonian systems
Differential version of∫
∂SE = − d
dt
∫
SB Faraday
∫
∂SH = d
dt
∫
SD Ampere
This means that D and B are differential two-forms,and E and H are differential one-forms!
Similar phenomenon in the telegrapher’s equations:
Voltage / current: functions on [a, b]Charge / flux density: one-forms Qdz , ϕdz on [a, b]
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 98 /
108

Distributed parameter port-Hamiltonian systems
General framework
Z is n-dimensional spatial domain with boundary ∂Z .The exterior derivative d : Ωk(Z ) → Ωk+1(Z ) incorporates all vectorcalculus operations ( grad, curl, div).Define a Dirac structure on the space of flows and efforts:
f = (fE , fM , fb) ∈ Ωp(Z )× Ωq(Z )× Ωn−q(∂Z )
e = (eE , eM , eb) ∈ Ωn−p(Z )× Ωn−q(Z )× Ωn−p(∂Z )
by setting
fE (t, z) = ±deM(t, z), fM(t, z) = deE (t, z),
fb(t) = eE (t, ∂Z ), eb(t) = ±eM(t, ∂Z )
(Transmission line: n = p = q = 1Maxwell’s equations: n = 3, p = q = 2 )
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 99 /
108

Distributed parameter port-Hamiltonian systems
Regulation of the shallow water equations
Consider again∂h∂t(z , t) = − ∂
∂z∂H∂v
(h, v)
∂v∂t(z , t) = − ∂
∂z∂H∂h
(h, v)
with the 4 boundary variables
hv|a,b
(12v2 + gh)|a,b
(mass flow and Bernoulli function at the boundary points a, b).
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 100 /
108

Distributed parameter port-Hamiltonian systems
Suppose we want to control the water level h to a desired height h∗.We cannot use the total energy as a Lyapunov function.An obvious ’physical’ controller is to add to one side of the canal, say theright-end b, an infinite water reservoir of height h∗, corresponding to theport-Hamiltonian ’source’ system
ξ = ucyc = ∂Hc
∂ξ(= gh∗)
with Hamiltonian Hc(ξ) = gh∗ξ, by the feedback interconnection
uc = y = h(b)v(b), yc = −u =1
2v2(b) + gh(b)
This yields a closed-loop port-Hamiltonian system with total Hamiltonian
∫ l
0
1
2[hv2 + gh2]dz + gh∗ξ
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 101 /
108

Distributed parameter port-Hamiltonian systems
By mass balance,∫ b
a
h(z , t)dz + ξ + c
is a Casimir for the closed-loop system. Thus we may take as Lyapunovfunction
V (h, v , ξ) := 12
∫ b
a[hv2 + gh2]dz + gh∗ξ − gh∗[
∫ b
ah(z , t)dz + ξ]
+12g(b − a)h∗2
= 12
∫ b
a[hv2 + g(h − h∗)2]dz
which has a minimum at the desired set-point (h∗, v∗ = 0, ξ∗)(with ξ∗ arbitrary).Remark Note that the source port-Hamiltonian system is not passive, sincethe Hamiltonian Hc(ξ) = gh∗ξ is not bounded from below.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 102 /
108

Distributed parameter port-Hamiltonian systems
An alternative, passive, choice of the Hamiltonian controller system is totake
Hc(ξ) =1
2gh∗ξ2
leading to the Lyapunov function
V (h, v , ξ) =1
2
∫ b
a
[hv2 + g(h − h∗)2]dz +1
2gh∗(ξ − 1)2
Asymptotic stability of the equilibrium (h∗, v∗ = 0, ξ∗ = 1) can beobtained by adding ’damping’, that is, replacing uc = y = h(b)v(b) by
uc := y − ∂V
∂ξ(ξ) = h(b)v(b)− gh∗(ξ − 1)
leading to (if there is no power flow through the left-end a)
d
dtV = −gh∗(ξ − 1)2
(See also the work of Bastin & co-workers for related and more refinedresults.)
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 103 /
108

Conclusions and Outlook
Outline
1 Plan for the week
2 Basics of port-based modeling
3 Definition of port-Hamiltonian systems
4 Scattering: from power variables to wave variables
5 Port-Hamiltonian systems and passivity
6 Other properties of port-Hamiltonian systems
7 Distributed parameter port-Hamiltonian systems
8 Conclusions and Outlook
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 104 /
108

Conclusions and Outlook
Conclusions and Outlook
• Port-Hamiltonian systems theory as a modular theory for complexmulti-physics systems
• Inclusion of infinite-dimensional component systems:differential-algebraic partial differential equations
• Leads to new control paradigms and strategies
• Not covered here (see literature): structure-preserving modelreduction, spatial discretization, network dynamics (port-Hamiltoniansystems on graphs), chemical and thermodynamic systems.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 105 /
108

Conclusions and Outlook
THANK YOU !See www.math.rug.nl/˜arjan for further info.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 106 /
108

Conclusions and Outlook
Some key references
• A.J. van der Schaft, L2-Gain and Passivity Techniques in NonlinearControl, Lect. Notes in Control and Information Sciences, Vol. 218,Springer-Verlag, Berlin, 1996, p. 168, 2nd revised and enlargededition, Springer-Verlag, London, 2000, p. xvi+249.
• A.J. van der Schaft, B.M. Maschke, The Hamiltonian formulation ofenergy conserving physical systems with external ports, Archiv furElektronik und Ubertragungstechnik, 49, pp. 362–371, 1995.
• M. Dalsmo, A.J. van der Schaft, On representations and integrabilityof mathematical structures in energy-conserving physical systems,SIAM J. Control and Optimization, vol.37, pp. 54–91, 1999.
• R. Ortega, A.J. van der Schaft, I. Mareels, & B.M. Maschke, Puttingenergy back in control, Control Systems Magazine, vol. 21, pp.18–33, 2001.
• A.J. van der Schaft, B.M. Maschke, Hamiltonian formulation ofdistributed-parameter systems with boundary energy flow, Journal ofGeometry and Physics, vol. 42, pp.166–194, 2002.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 107 /
108

Conclusions and Outlook
• G. Golo, V. Talasila, A.J. van der Schaft, B.M. Maschke, Hamiltoniandiscretization of boundary control systems, Automatica, vol. 40/5,pp. 757–761, 2004.
• J. Cervera, A.J. van der Schaft, A. Banos, Interconnection ofport-Hamiltonian systems and composition of Dirac structuresAutomatica, vol. 43, pp. 212–225, 2007.
• R. Pasumarthy, A.J. van der Schaft, Achievable Casimirs and itsImplications on Control of port-Hamiltonian systems, Int. J. Control,vol. 80 Issue 9, pp. 1421–1438, 2007.
• D. Eberard, B. Maschke, A.J. van der Schaft, An extension ofpseudo-Hamiltonian systems to the thermodynamic space: towards ageometry of non-equilibrium thermodynamics, Reports onMathematical Physics, Vol. 60, No. 2, pp. 175–198, 2007.
• Geoplex Consortium, Modeling and Control of Complex PhysicalSystems; the Port- Hamiltonian Approach, Springer, 2009.
• A.J. van der Schaft, B. Maschke, Discrete conservation laws andport-Hamiltonian systems on graphs and complexes, submitted forpublication, 2011.
Arjan van der Schaft Johann Bernoulli Institute for Mathematics and Computer Science, University of Groningen, the Netherlands DimitriHamiltonian control systemsElgersburg School, March, 2012 108 /
108