DYNAMIC TENSEGRITY SYSTEMSInvestigating a case in reconfigurable
habitable structuresDishita G. TURAKHIAcubeALGO Research Lab,
Mumbai, [email protected]. Irregular tensegrity
structures, due to their non-linear behaviour,possess the potential
ability to configure in multiple stable states. The
kine-maticsandinherentpropertiesofthecompressiveandtensilecomponentsgovern
the final static configuration of the system. The primary objective
ofthe research is to study the non-linear behaviour of irregular
tensegrity struc-tures and formulate a computational generative,
evaluative and
algorithmicmethodtodesignastructurallydynamictensegritysystem,withinherentpotentialtoadapttothevaryingcontextsanditsrespectivedemands,requirements
and spatial needs.Keywords. Tensegrity; non-linear systems;
dynamic; generative algorithm;reconfigurable structures. 1.
Introduction1.1. NON LINEAR DYNAMIC
SYSTEMSLinearsystemsgenerallytendtobecharacterizedbyasingleglobalstate,butdynamic
systems which are both non-linear and non-equilibrium, display
multiplestable states that behave in a variety of additional forms,
namely steady, periodicand chaotic states as explained in causality
principle (Peitgen et al., 1992, p. 11).We are beginning to
understand that any complex system, whether composed ofinteracting
molecules, organic creatures or economic agents, is capable of
sponta-neouslygeneratingorderandactivelyorganizingitselfintonewstructuresandforms,saysManuelDeLanda(2004).Itispreciselythisabilityofmatterandenergy
to self-organize and exist in multiple stable states, which is of
greatest
sig-nificanceduetoitspotentialapplicationtoadapttocontext.NealLeach(2004)states,
in most advanced form, it would be an architecture that is open to
thoseR.Stouffs,P.Janssen,S.Roudavski,B.Tuner(eds.),OpenSystems:Proceedingsofthe18thInternationalConferenceonComputer-AidedArchitecturalDesignResearchinAsia(CAADRIA
2013),97106.2013,The
AssociationforComputer-AidedArchitecturalDesignResearchinAsia(CAADRIA),HongKong,andCenter
for Advanced Studies in Architecture (CASA), Department of
Architecture-NUS, Singapore.972A-057.qxd4/28/20133:23 AMPage
97processes themselves, as adaptive, responsive environment, that
does not crystal-lize into a single, inflexible form, but is able
to reconfigure itself over time, andadjust to the multiple
permutations of programmatic uses that might be
expectedofit.Theinherentmorphogeneticpropertyandvariablebehaviourofcomplexdynamic
systems still remains to be studied, analysed and explored
thoroughly toits complete potential in architectural context. 1.2.
TENSEGRITYAS NON LINEAR DYNAMIC SYSTEMConventionally studied
regular tensegrity structures can be classified as linear sys-tems
i.e. having a single global stable state based on number of struts
and
hencepredictableintermsofsolution.However,recentinvestigationsinthefieldofdeveloping
and designing the tensegrity have led to identifying the complex
non-linearbehaviourofirregularstructures(DeLanda,2004).Whiletheprimaryparameters
governing the morphological stable state of the system are the
proper-tiesofitscompressiveandtensilecomponents,theconnectionlogicandnodaldegreeskineticfreedomoftheconfigurationalsocontributesignificantlytotheresultant
stability and morphogenetic variation. Irregular tensegrity
structures hav-ing identical strut number and lengths can exist in
variant morphologies based onconnection logic and node forces.1.3.
SIMULATION OF TENSEGRITY STRUCTURESTensegrities are 3-dimensional
stable mechanical structures that maintain its
stabilityduetoanintricateequilibriumofforcesestablishedbetweenitsrigidanddisjointcompressiveandcontinuoustensilecomponents.Theynotonlyexhibitanexcep-tionally
high strength-to-weight ratio but also possess the unique property
of retainingits stability in zero-gravity (Williamson et al., 2002)
spaces because the stable
mor-phologyispurelyafunctionofitscomponentpropertiesandisirrespectiveofexternal
forces. However, the determination of stable configurations that
result fromthe connectivity patterns between the compressive and
tensile components is
highlychallengingduetoexistenceofmultiplestablesolutions.Thustheform-findingprocess
of the tensegrity structures involves computational support
juxtaposed
withalgorithmicapproachtoovercomethelimitationsoftheavailablemathematicalmethods
that have restricted scope of exploration (Paul et al., 2005, p.
3).1.4. COMPARATIVE ANALYSISThe primary difference between regular
and irregular tensegrity structures is theuniformity and variation
in the strut lengths respectively. A comparative analysis98 D. G.
TURAKHIA2A-057.qxd4/28/20133:23 AMPage
98betweentheregularandirregularmorphologies,resultingfromasetofprelimi-naryexperiments,concludedthatregularmorphologiesonlygeneratedproportionalvolumetricandorientationvariationwhensubjectedtostrut-lengthvariation
(applied uniformly). The regular geometries were also more
predictableand behaved linearly (with single resultant stable
state) as opposed to non-linearbehaviour of irregular tensegrities
which showed un-predictable variation in
vol-umes,shapes,numbers,andstabilityofresultantmorphologies.Inspiteofthenon-linearbehaviour,orrather,duetoit,architecturally,irregularlygeneratedmorphologies
could be spatially differentiated and hence more useful in
contrastto the uniform, symmetrical, cellular and architecturally
less usable spatial condi-tions of regular tensegrities. Also, the
variation provided the potential of
creatinglimitlesslyvariedmorphologiesfordiversedesignapplicationsinvarioustopo-logical
contexts. This characteristic diversity in irregularly generated
modules alsoprovides scope for higher complexity and further
variation when organized in dif-ferent hierarchical manner thus
expanding its application at various scales
(Ingber,2003).Theseobservationswerekeyfactorsinnarrowingtheinvestigationonirregular
tensegrity geometries to develop methods to predict and explore
multi-plystableformswithdiversespatialconfigurationsandtherespectivearchitectural
applications.2. Generative Algorithm This research uses generative
algorithm to investigate the infinite solution spaceof irregular
tensegrity structures, by digitally generating numerous random
basicunstable seeds within certain parameters, and then relaxing
them into all the pos-sible stable relaxed states within the given
set of connection logic using dynamicrelaxation methods. The
procedure involves use of dynamic relaxation for
simu-latingthematerialpropertiesandsystemperformancewhileobtainingstableforms
based on the input mechanical constraints and kinetic freedom. The
rigor-ousanalytical,evaluative,eliminativeandselectiveprocedurethatfollowstherelaxation
stage, aims at achieving optimal residual set of digitally
developed andtested morphology modules that form the basis for next
stage of design develop-ment aimed at organization logics of the
emergent design. 2.1. PSEUDO-CODE This step involved setting up the
digital apparatus for the experimental explorationof irregular
morphologies. Since the design domain was so wide and limitless,
itwasessentialtofixthelistedparameterstolimittheboundariesofexperiment,that
involved first generating a widely variant set of unstable basic
seeds, whichDYNAMIC TENSEGRITY SYSTEMS 992A-057.qxd4/28/20133:23
AMPage 99would be later relaxed in its respective possible multiple
stable states followed
byintensivestructurallyevaluativeeliminationprocess.Inordertogenerateran-domlyvariantinitialpopulation,agenerativescriptwaswritteninRhinoscriptfollowing
the pseudo-code shown. The first step involved generation of the
unstable basic seed based on the
inputparameterofnumberofstruts.Inordertoachieveastabletensegritystructure,each
node needed at least one strut and at least 3 cables connected.
Hence, con-sidering N number of strut as input in the script, the
process generated 2N
numberofsymmetricnodesdividedin2planes(eachplanewithNnodes)inacircularequidistant
manner. These nodes are then randomly connected by 4N number
oflinkssuchthateachnodehas4setoflinks.Theselinksarethenrandomlyassigned
component properties with the limitation of each node bearing one
strutand3cables.Thestrutsandcablesarenowrandomlyexchangedandshuffledwithoutchangingthelimitationofnumberofstrutsandcablesateachnodebutproducing
variant basic (unstable) seed morphology.The next step of dynamic
relaxation of the unstable basic seed required assign-ing elastic
modulus to the cables. The cables (3N) are divided into
form-findingelasticcables(codedblueindiagram)andnon-form-findingcables(colouredblack
in diagram). The form-finding cables were the links connecting
nodes
ver-ticallyandnon-form-findingcablesconnectedthenodeshorizontallyinsameplane.
Thiswasfollowedbyselectingrandomlysetof3nodesandfixingthesenodes in
x-y-z planes, y-z planes and z plane respectively, thus fixing 6
degrees offreedom in translational motion (Tibert and Pellegrino,
2003). The basic seed wasthen relaxed using Rhino-membrane plug-in
interface. In order to further compare and evaluate the produced
geometries, each of
theresultantmorphologieswasdigitallytestedforrespectivespatialpropertiesofenclosed
volume, base area and clear height. The reason to have a geometric
eval-uativeanalysisofthevastlyvariantrelaxedmorphologiesproducedwastoeliminate
the architecturally unusable forms, as this is an investigation to
produceforms that would prove useful to be inhabitable spaces. This
indicated that largerunobstructed volumes (with higher clear
height) and morphologies with larger base100 D. G. TURAKHIAFigure
1. Pseudo-code for the generative algorithm.2A-057.qxd4/28/20133:23
AMPage 100area (and hence more stability) were potentially fitter
for architectural applications.An algorithmic script was written to
calculate these properties of volume, base areaand clear height to
the closest plausible values, as precise calculation was not
onlytediousbutcomputationallytime-consuming.Forvolumecalculation,boundingboxesenclosingthegeometryweregeneratedwhereeachboundingboxwasaligned
with each one of the outer plane of the geometry. (Alternately the
convexhull method could also have been used to calculate the volume
of the morphology.)The minimum volume of the bounding box was
chosen as the geometry volume.Same concept was used to
algorithmically calculate base area (by selecting maxi-mum of the
various 3-point planar areas) and clear height (by choosing least
of theinternal 1 point to 3 points planar distances). In terms of
the weightage of the abovegeometric fitness criteria, the enclosed
volume was the most important (for
spatialusability),followedbylargerbasearea(forstability)andthenfinallytheclearheight.
Thus the morphology with highest volume would tend to be fittest,
with itslargest base area being used to help achieve the most
stable orientation and largerground space for habitation and
enclosure, and preferably the most plausible clearheight to provide
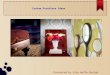
enough room internally for optimal spatial usage.2.2. MORPHOLOGY
GENERATIONUsingthegenerativescript,atleast40unstablebasicseedswerecreatedwith5struts,
6 struts, 7 struts, 8 struts and 9 struts geometries (since 3 and 4
strut geome-tries produced only 1 and 2 seeds respectively). Each
of unstable basic
geometrieshaduniqueconnectionlogic,andthuswouldproducehighvariationintheirrespective
relaxed modules. It was observed that 6 and 8 struts geometries had
atendency to relax into similar relaxed geometries and produce less
variation
whileoddnumberedstrutgeometrieslike5,7and9strutsproducedmorevariantrelaxed
geometries. Also the number of form-finding and non form-finding
cablesplayedacrucialroleinstabilityofgeometries.Itwasobservedthatgeometrieswith
higher ratio of number of form-finding cables and number of
vertical strutsproduced lesser number of stable geometries.DYNAMIC
TENSEGRITY SYSTEMS 101Figure 2. A six strut unstable basic seed
resulting in multiple stable geometries.2A-057.qxd4/28/20133:23
AMPage 1012.3. EVALUATION STAGE 1- VOLUMETRIC PROPERTIESOnce
calculated, each of the respective geometric data was graphically
plotted asshown in the example in order to have a comparative
analysis and elimination
pro-cedure.Thegeometrieswithmaximumenclosedvolume,largerbaseareaandhigher
clear heights were selected thus eliminating the flatter, condensed
and con-tracted unusable geometries.102 D. G. TURAKHIAFigure 3.
Volumetric evaluation a six strut basic seed and the corresponding
geometries.Figure 4. Graphical representation of strut and cable
lengths a selected geometry.2.4. EVALUATION STAGE 2-FABRICATION
EASEThesecondstageofevaluationintendedtoaccessthefabricationeaseofthemodules.
Thefirststepinvolvedeliminatinggeometrieswithintersectingstrutsasitwasstructurallynotfeasibletofabricate,whilethesecondstepinvolvedanalysing
uniformity in the strut and cable lengths for fabrication ease. In
orderto assess this regularity in lengths of struts and cables,
values for each strut andcable length is plotted graphically. A
flatter line graph implied higher
uniformityincomponentdimensions.Thisprocedurehelpedinretainingeconomicallybuildablemodulesandeliminatedgeometrieswithtoomanyvaryingstrutandcable
lengths. The filtered out modules were then selected for further
structuraltests and analysis.2A-057.qxd4/28/20133:23 AMPage 1022.5.
STRUCTURAL TESTS Structural analysis in Strand was carried out for
the selected modules to
simulatethedeflectionofthenodesandthebucklingthresholdofthestrutsundertheassigned
load and to get the appropriate geometry of the
components.Forthedigitalsetup,strutswereassignedpropertiesasbeamswithelasticmodulus.Cablesweredefinedasspringswithaxialstiffnessofeachcableinversely
proportion to its length. Based on the geometry, minimum three
nodeswere fixed on the ground in the translational x, y and z axis
keeping the rotationalmovementfree.
Theothernodesweresubjectedtoaloadof1000Ninthe(-z)direction. Each
module was tested for three strut cross-section diameter value
viz.20mm, 50mm and 75mm and under three load cases with varying
pretension val-ues of 0.02, 0.01 and 0.001 in the tension
cables.2.5.1. Linear static analysisLSA
wascarriedouttostudythedeflectioninthegeometrycausedduetothedesignedload.Basedontheinferencesoftheaboveexperiments,thefinalstrutgeometryandcablepretensionvaluewasdecided.Incertaincasestogetthedesired
stability for the designed load, combinations of different strut
dimensionswasexplored.Thisexercisehelpedinclassifyingthegeometriesbasedontheirstructural
stability and load bearing capacity.2.5.2. Linear buckling
analysisThe LBAestimated the load at which the struts will begin to
buckle and was gov-erned by the strut diameters. The structural
analysis done for one of the selectedmodules is shown below where
the buckling loads for the structure was calculated.Since the
buckling load was lower than the required design load the struts
had
toberedesignedbychangingthediameterinordertoincreasethestrengthofthestructure
and to ensure stability under critical load of 1000N. DYNAMIC
TENSEGRITY SYSTEMS 103Figure 5. A selected geometry tested for
Linear Static and Buckling Analyses.2A-057.qxd4/28/20133:23 AMPage
1033. Dynamic Experiment 3.1. MULTIPLICITYThe next step of the
experiment was to test the selected modules for possibility
ofdynamic spatial re-configuration. The strut and cable dimensions
and lengths playa very crucial role in the stable configuration of
the relaxed form. This property
ofproducingvariantstableformswithslightchangeinthedimensionwasusedtoachievedynamismintheformbymanipulatingcomponentlengthsandorienta-tion.
This experiment was carried out to test each of the selected design
modulesfor possibility of distinctly usable spatially reconfigured
organization. This char-acteristic feature was the key to achieving
program based dynamic performance ofthe system.The manipulation of
the component properties was carried out by either
chang-ingthelengthofstrutsortherotatingthestrutswithonefixedend.Theexperiment
was limited to manipulating only one strut at a time; only the 3
strutswith one end fixed at the base were manipulated. The length
change was limitedto either increasing or decreasing by 1.5 m at
the free end of the fixed strut. Thechange would be achieved by
having telescopic struts that could be increased
anddecreasedby1.5matthefreeendofeachofthe3fixedstruts.Thetelescopicchange
would require to be triggered manually as per the programmatic need
oruserneedtoreconfigurethestructureforenclosedspace.However,duetopre-stressed
nature of the system, this mechanism would require either use of
motorsor dismantling of structure and re-assembly of the
module.Therotationalchangewasalsolimitedtoa+100or100inthex-yplaneaboutthefixedendofthestrut.Thechangewouldbeachievedbyusingpinjointeddetailingwithfreedomforrotationatthefixedend.Thedigitalexperi-mentationwascarriedoutinRhino-membranebyre-assigningthecomponentproperties
and relaxing the structure again after the manipulation. In both
the casesthe module sometimes produced a large spatial variation
and re-configuration, butmost of the times resulted in swaying.104
D. G. TURAKHIAFigure 6. Selected module tested for rotational
manipulation of component.2A-057.qxd4/28/20133:23 AMPage 1043.2.
MEMBRANESThe next design step was creating enclosures in these
design modules by not onlyretaining the spatial differentiation of
spaces but rather enhancing it using
tensilemembranes.Inordertounderstandthestructuralimplicationsofthemembraneaddition,
the modules were again tested under same conditions as before for
struc-turalstability.Itwasobservedthatthetensilemembranesaffectedthebucklingloadsasthestructurehadnowstartedfailingatlowerthresholdloadsimplyingthat
the strength of the structure required to be regained by further
increasing thestrut diameter. DYNAMIC TENSEGRITY SYSTEMS 105Figure
8. Linear Buckling Analysis Test on module after membrane
addition.Figure 7. Selected module tested for length manipulation
of component.4. ConclusionThe use of digital scripting tools to
predict structural behaviour and formulate
thealgorithmicform-findingprocesshelpedinexploringthevastdesignspacedomain
of irregular tensegrity structures which has been very sparsely
explored.The intense evaluation stages and elimination process
helped in efficiently filter-ing out the potentially usable design
modules. Simulation of non-linear complexsystem behaviour and the
multiple-stable states of morphologies, produced fromthe generative
process, provided an efficient digital apparatus for further
studying,analysing irregular tensegrity structures including its
varied application possibilities.2A-057.qxd4/28/20133:23 AMPage
105However,thereisaneedofafeed-backloopinthedigitalexplorationwhichwouldenablethelearningandconclusionsofeachstagetobeappliedintheprocess
by re-iterating the stages with revised procedures.
Combiningthesystemwithspringsorsensorswouldfurtherinvestigatethedynamic
system behaviour without the need to mechanically change the
structure.There is also further scope of researching on methods and
techniques that wouldexplore the modularity of the system in much
deeper sense to come up with moreemerging complex structural
systems.ReferencesDeLanda, M.: 2004, Material Complexity, in N.
Leach, D. Turnbull and C. Williams (eds.), DigitalTectonics,
Wiley-AcademyIngber,D.E.:2003,
TensegrityI.Cellstructureandhierarchicalsystemsbiology,JournalofCellScience,
116(7), 11571173.Leach,N:2004,SwarmTectonics,in
N.Leach,D.TurnbullandC.Williams(eds.),DigitalTectonics,
Wiley-Academy.Paul, C., Lipson, H. and Cuevas, F. J. V.: 2005,
Evolutionary form-finding of tensegrity structures,Proceedings of
the 2005 conference on Genetic and evolutionary computation GECCO
05.Peitgen,H.-O.,Jurgens,H.andSaupe,D.:1992,ChaosandFractals:NewFrontiersofScience,Springer.Tibert,
A. G. and Pellegrino, S.: 2003, Review of Form-Finding Methods for
Tensegrity Structures,International Journal of Space Structures,
18(4), 209223. Williamson, D., Skelton, R.E. and Han, J.: 2002,
Equilibrium Conditions of a Tensegrity Structure,Proceedings of the
Third World Conference on Structural Control (3WCSC), 712 April
2002,Como, Italy.106 D. G. TURAKHIAFigure 9. Modular reorganisation
to form architecturally habitable and re-configurable spacesand
structures.2A-057.qxd4/28/20133:24 AMPage 106