Embed Size (px)
Citation preview

Pergamon 0952-1976(95)00012-7
Engng Applic. Artif. Intell. Vol. 8, No. 3, pp. 355-364, 1995 Elsevier Science Ltd. Printed in Great Britain
Brief Paper
Implementing an Expert System for Fault Diagnosis of Electronic Equipment
T. S A T Y A N A R A Y A N A Defence Metallurgical Research Laboratory, India
G. S U B R A M A N Y A M Defence Metallurgical Research Laboratory, India
K. V. R A M A R A O Defence Metallurgical Research Laboratory, India
(Received April 1994; in revised form January 1995)
The aim of this work is to develop a rule-based expert system to aid an operator in the fault diagnosis of the electronics of forge press equipment. It is a menu-driven package, developed in Turbo P R O L O G on an IBM PC., to help the operator fix faults up to replaceable module level. The system has been broadly categorised into eight sub-systems, and the rules, based on fault cause relations, have been developed for each of the sub-systems. This modular development reduces the access time, and also facilitates the handling of the knowledge base.
Keywords:
1. INTRODUCTION
Fault diagnosis is required for any type of equipment: mechanical, electrical, electronics or any hybrid system. One of the problems encountered when a machine breaks down is that the expert maintaining the equipment may not be available at the site at that time. Even if the expert is available, he will have to put in a lot of effort going through the equipment manuals and strain his memory to diagnose the fault quickly to set the equipment right. This is complicated, in that often the maintenance expert may be called upon to maintain more than one type of equipment, and fault diagnosis of any equipment is a very knowledge-intensive task. Expert trouble-shooters emerge only after years of experience in the operation and maintenance of the same equipment. In such cases, it is useful to have a computer-based troubleshooting expert system which could be used by an operator or a technician at the site to help him diagnose the fault quickly and undertake necessary repair to put the equipment back into oper- ation. In the past decade a number of knowledge-based systems have been developed in the electronic engi- neering field, i
Correspondence should be sent to: Dr T. Satyanorayan, Defence Metallurgical Research Laboratory, Kanchanbagh P.O., Hyderabad 500258, Andhra Pradesh, India.
In the present work an expert system for aiding the diagnosis of the electronic system of the 2000 T forge press equipment has been implemented. The paper discusses the various issues in designing and imple- menting an expert system for fault diagnosis.
2. EXPERT SYSTEMS FOR FAULT DIAGNOSIS
The area of knowledge-based diagnostics can be broadly classified into two approaches. The first is reasoning from first principles of functionality and the other is reasoning from general and specific facts of the equipment under consideration. A survey of the exist- ing strategies for diagnosis is described by Milne. 2
Reasoning from first principles, or model-based rea- soning, is an expert-system implementation methodol- ogy that uses a model or simulation of the system that is being reasoned about. Model-based representation and reasoning techniques offer many advantages and are highly suitable for domains where the individual com- ponents, their interconnections, and their behaviour are well known. Expert systems for troubleshooting electronic modules up to component level can be imple- mented using this approach. 3
The other approach is to build an expert system without any deep knowledge of the domain under consideration. Such expert systems are built using only
355

356 T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT
general and specific facts about the domain concerned. In a diagnostic system, the symptoms exhibited by a malfunctioning system and their probable causes are usually linked in the form of rules. An expert system for diagnosing faults in a chemical process plant, using this approach, has been presented by Shum et al . 4 A
good review of the distinct advantages and disadvan- tages of this approach has been presented by Beraft. S Expert systems that aid in troubleshooting equipment up to module level can be implemented using this approach.
The problem of equipment diagnosis, and in particu- lar electronic system diagnosis, can be viewed at differ- ent levels of abstraction: it can be viewed at the level of replaceable functional modules, or at a lower level of replaceable components. A look into the diagnostic problem-solving approach for electronic equipment in industry clearly establishes the fact that the mainten- ance engineer, as a first step, aims at identifying the faulty functional module or modules. Having identified the faulty module, he replaces it with a working spare module to put the equipment back into operation in the shortest possible time. He then goes about repairing the failed module by identifying and replacing a faulty component or components in it.
In the first step, therefore, the diagnostic task is approached using qualitative considerations and com- piled forms of knowledge. It is only in the second step that the quantitative structure of the electronic circuit design and deeper forms of reasoning are brought into the diagnostic task. 6
3. SCOPE OF THE PRESENT WORK
The scope of the present work is as follows:
(1) To design an expert system to troubleshoot an item of electronic equipment.
(2) To implement the system to aid a technician, with less experience in operation of such equipment, in troubleshooting the electronic control system of the 2000-tonnes forge press in operation in the authors' laboratory.
4. DESIGN OF THE EXPERT SYSTEM
Based on the above fault-diagnostic strategy, a rule- based expert system has been designed for the first step in the diagnostic process. A model-based expert system is appropriate for the second step, and will be addressed in subsequent work.
Fault diagnosis of electronic equipment in the first step can be viewed as the process of linking symptoms to causes. The diagnostic process begins with the con- sideration of the fault symptoms in one or more of the functional modules that make up the equipment. If the fault symptoms suggest that a malfunction hypothesis is valid, then the diagnostic task continues with more refined hypotheses about more-detailed replaceable
subunits of that particular functional module. On the other hand, if a malfunction hypothesis is rejected, then the entire functional module can be excluded from further consideration. The reasons for rejecting a hypothesis could be:
(1) The functional module under consideration might receive inputs from other functional modules in the equipment. If one or more of these inputs are faulty, it might erroneously point to a fault in the module under consider- ation.
(2) A number of interlocks are built into an elec- tronic equipment for safety and operational considerations. If one or more of these inter- locks fail, then again it might erroneously reflect as a fault in the module under consider- ation.
Using domain-specific knowledge, the set of possible symptoms, malfunction hypotheses, inputs and inter- locks for each of the functional modules making up the equipment are enumerated.
By directly associating with each hypothesis the dis- criminating symptoms, this diagnostic approach utilises compiled knowledge about the equipment. This knowl- edge is extracted from the technical documentation of the equipment, and from the maintenance expert who might have acquired it through experience or derived it from a deeper understanding of the equipment.
The expert system can be made to learn from its experience by introducing a dynamic learning concept based on the recurrence of problems] A numerical factor or weight is added to each of the malfunction hypotheses. The weight is a function of the frequency of occurrence of the particular fault hypothesis. By implementing this dynamic factor, the expert system will first present to the technician those malfunction hypotheses which are more likely to occur, followed by the less likely ones.
Further, new knowledge in the form of new symp- toms and their corresponding solutions can be added to the expert system by asking the user to feed in the new information at an appropriate time. ~
Both the above features of learning are safeguarded by incorporating a "password" for their access. This will ensure that the expert system will learn new infor- mation only when told by a responsible human expert.
4.1. Description of the electronic control system of a forge press
A 2000 T multifunction forge press is being used to develop hot metal forming technologies for various materials applications in the authors' laboratory. This press is unique in that it incorporates a capability for all modes of forging, namely, open die, closed die, isother- mal and liquid metal forging, and in addition, provides a capability for metal extrusion. The forge press is hydraulically operated and is controlled by a state-of-

T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT 357
2000 t Press Manipulator [ Side rams
t T 10 Mb
hard disk ~ 1.2M
t h e r m ~ ~ - ~ Supervisory computer
80 c o l u m n ~ 4 _ . 4 IBM-PC/AT d otmat rix~-~-~-~-~ ' I
printer £'.'.':;/ ~ T
I It
Mobile control desk
Container cylinders
Ejector I cylinder
t Motors [ I
t t "'d="°' Motor control ]
c e n t r e
Multi-micro processor based control system
/ / C ° n t r ° l desk ~ ~
Fig. 1. Block diagram of 2000 T forge press.
Turn I table
Table shift
t l T
]_ I 5KVA voltage I [- I stabilizer I
the-art electronic control system. The forge press is operated by persons with a background in metallurgical operations with a very little knowledge of electronics. In order to help the non-electronic persons in maintain- ing the electronics of the forge press, a need was felt to develop an expert system for the electronic control system of the forge press.
4.2. Forge press electronics
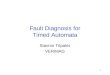
The block diagram of the forge press and its elec- tronic control system is shown in Figs 1 and 2. The control system is built around 8 bit Z-80 microproces-
sors in a modular fashion. The motor control centre which controls the different electric motors which run the hydraulic pumps is monitored and controlled by the "electric CPU". A number of digital input/output chan- nels are provided to start/stop motors and monitor alarm conditions, like motor electric and thermal over- load. The "Press CPU" controls and monitors the press movement, speed, force and position. The "Manipu- lator CPU" controls and monitors the manipulator and the press strokes. The data record CPU logs the various parameters like press force, position, speed, column stretch, die temperature and piece temperature while
Stretch LI I
Stretch ~] I I LI
Stretch4 1111 _-I
press IIII 1] Temp. Illl Ill
= ' t t t t t t t f ' 12 Channel ] V V recorder
Solenoid valves.,.---
Lamps
Press positiono-~
Servo valves = Prop. valves
Meter pump pos.p---
Solenoid valves =
Variable-~------ pumps
Desk cat
Press processor
: ." Press position
- ." Desk devices Limit switches Ref. press speed
-,,-Press speed Pressure
T Motor "---
~1 To supervisory l computer
Manipulator processor
',----Lift pos. Ref. travel Ref. rotation
'.-----Desk devices Limit switches
',,---Jaw position Manipulator position
M.C.C. processor
• ,---- Front pannel desk
• '--- Filter, level, pressure, lube temp. rpm
Runsignals Fuses, overloads
Fig. 2. Block diagram of forge press control system.

358 T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT
Knowledge base 1
I Inference engine Dynamic data base ]
I User interface
Fig. 3, Block diagram of expert system for diagnosis of electronic equipment.
forging is in progress. All of the above processors are loosely coupled, and they exchange messages over serial links. The control system further provides for equipment diagnostics and safety interlocks.
5. IMPLEMENTATION OF THE EXPERT SYSTEM
The block diagram of the expert system is shown in Fig. 3. It essentially consists of an inference engine, interacting with the user through the user interface module, and the knowledge base, containing diagnostic knowledge of the equipment in form of rules. The expert system has been implemented using Turbo Prolog on an IBM-PC.
The following paragraphs detail how each of the modules is implemented.
5.1. User interface
A menu-driven user interface has been implemented. The user is presented with a menu of the different functional areas of the forge press system. On selection of one of these areas by the user, he is presented with another menu of functional modules present in that area. On selection of a module, suspected to be faulty, another menu pops up, displaying the different symp- toms likely to be present in the suspected faulty mode. On the basis of the symptom selected, the interface module queries the user with a number of questions, in a bid to confirm or deny the presence of a fault in the suspected faulty module, and obtains feedback in the form of Yes/No replies from the user. The information thus gathered is passed on to the inference engine. The results of the inference engine, which in this case are possible faults along with guidelines as how to fix them, are output by the user interface module in textual form.
5.2. Knowledge base
To implement the expert system according to the design outlined previously, the forge press control system is first divided into broad functional areas, as easily identified by an operator of the equipment: front panel press, front panel manipulator, front panel moni- toring, control desk press, control desk manipulator, motor control centre, Junker panel and Marx panel. In each of the functional areas, functional modules are enumerated; for example, control voltage, ground fault, alarm notification, pre-pilot pump, filter_6, leak oil pump, cooling valve, circulation pump, boost 1
pump, boost 2 pump, pilot 1 pump, pilot 2 pump, main 1 pump, main 2 pump, system stop and press enable/ disable are the functional modules in the front panel press system. For each of the modules thus arrived at, the following information is gathered from the main- tenance expert:
(a) Symptoms exhibited by the module in one or more of its failure modes.
(b) For each failure mode, a list of interlocks to be satisfied.
(c) For each failure mode, the inputs required from other modules in the system. Some of these modules could be 'hidden' from the operator, in the sense that they are not directly known to him, for example a 5 V power supply unit.
(d) list of possible solutions for each failure mode.
The knowledge thus acquired is fed into the knowl- edge base of the expert system. To store the machine- specific diagnostic knowledge, the knowledge structure shown in Table 1 has been devised.
Table 2 contains the partial knowledge base of the forge press diagnostic expert system. The knowledge base thus obtained for the complete system turned out to be very large. The main disadvantage of a very large data file is the enormous delay in accessing the required information from it. To overcome this disadvantage, the knowledge file was split into a number of smaller files. Since each functional block in the equipment under consideration is independent of the others in the system, a separate file was created for the knowledge associated with each block. Such an arrangement has made each file much smaller and hence easier to han- dle, and also reduced the information accessing time, since the file to be searched is now much smaller in size. The knowledge base for each of the functional blocks contains on average about 200 rules of the type enu- merated above.
Table 1. Knowledge base structure for fault diagnosis of forge press electronic equipment
get([list of functional blocks in equipment]) getm(i,[list of units in the i th functional block]) module(ij,symptom exhibited by the j th unit in
i th block]) confirminput(i,j,k,input_unit,description of interlock
essential for the k th module of the j th unit in the i th block)
possiblefault(ij,k,l,fault description,notes on how to confirm I th fault in k th module in j th unit in i th block)
possiblesolution(iO,k,l,solution for the I th fault in the k th module of the j unit in the i th block)
possiblesolution in hiddenunit(ij,k,input_unit,notes on how to satisfy the interlock)
freqofoccurence(i,j,k,l,relative frequence(%))

T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT 359
Table 2. Sample knowledge base of the forge press diagnostic expert system
module( 1,1 ,"Control Voltage INDICATION NOT ON."). module(1,13,"Main 1 Pump NOT ON."). eonfirminput(1,1,1,"mains", "Is supply voltage 220V, 50 Hz, AC present ?", "Check"). confirminput(1,13,1 ,"circulation__~ost_pump_pilot_pump", "Are ci~ ".ulation boost & pilot pumps ON ?", "The circulation, boost & pilot pumps should be running for switching ON main pump."). confirminput(1,13,1 ,"powersupply_220v",
"Is 220V AC present ?", "Cheek voltage at L2.1 & GND."). confirminput(1,13,1,"push_button_s6",
"Is START MAIN 1 PUMP pulse present ?", "Check voltage 24 V & 0 V at L3.+ & L3.8 by pushing $6
ON/OFF."). confirminput(1,13,1,"peb 2 34","Is MAIN 1 PUMP START signal
present ?","Check voltage 24 V at L2.5 & L2.4."). possiblefault(1,1,1,1 ,"indicating_bulb"). possiblefault(1,1,1,2, "key_switch"). possiblefault(1,13,1,1 ,"traic_module T 1 "). possiblefault(l,13,1,2,"relay_10kS"). possiblefault(1,13,1,3,"motor_starterl 0k2m"). possiblefault (1,13,1,4,''motor__m41_l"). possiblesolution( 1,1,1,1 ,"If indicating bulb fused.","Replace with a new bulb."). possiblesolution(1,1,1,1,"If indicating bulb O.K. ","Cheek wiring as
per drawing number 1219.31."). possiblesolution(1,1,1,2,"If key switch is faulty.","Replace with a
new switch."). possiblesolution(1,1,1,2,"If key switch O.K.","Check wiring as per
drawing number 1219.31."). possiblesolution( 1,13,1,2,"If relay 10KS is NOT ON ","Ensure relays
17K 1,18K1,19K1 are ON.If 10K8 is still NOT ON,replace with spare relay.").
possiblesolution(l, 13,1,2,"If relay 10KS is ON","Ensure 4F2 is ON."). possiblesolution(1,13,1,3,"If motor starter 10K2M is NOT ON",
"Replace with spare motor starteg'). possiblesolutien(1,13,1,3,"If motor starter 10K2M is ON","Ensure
fuses 4F1 are O.K."). possiblesolution(1,13,1,4,"Check motor M41.1 .","If motor faulty,
replace with a spare motor."). possiblesolution(1,13,1,4,"If motor O.K.","Cheek wiring as per drg.no.146.3.").
5.3. Inference engine
To begin with, the inference engine, based on the selected functional area, loads the file containing the rules/facts of that area into the dynamic database. This is done by the predicate 'ld(functionai area)' as shown in Table 3. Then the inference engine displays the symptoms for the suspect unit as input by the operator. On selection of one of the symptoms by the user, the inference engine, with the help of the predicate 'chk', confirms from the user if all the inputs to the unit are correct. If all the inputs are correct, the inference engine lists all possible faulty modules and offers cor- responding solutions with the help of the predicates 'possiblefault' and 'possiblesolution'. If one of the inputs to the unit is faulty, the inference engine invokes the predicate 'chkinputs' as shown in Table 3, and guides the operator to rectify this fault first.
5.4. Sample user session
A sample user session is shown in the Appendix. The consultation begins with the display of a menu of the functional areas in the equipment. On selection of a functional area by the user, the next screen prompts for the selection of a faulty module. On selection of a suspected faulty module, the next screen shows the likely symptoms that can be present in that particular module. When the user enters the fault symptom, the system presents various screens that guide the user to locate a faulty replaceable unit in the equipment.
6. CONCLUSION
The expert system has been implemented specifically for aiding a technician in troubleshooting the electronic system of the 2000 T forge press equipment in the

360 T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT
Table 3. Main code of inference engine for forge press diagnostic expert system
sym(Ch0,Ch,L,Eq):- ld(Ch0,Ch), shiftwindow(l 4), clearwindow, dispsymptoms(Ch0,Ch,L), write(""),nl,nl, wri teCWhat is the problem in ",Eq," ?"),nl, menu(3,50,15,25,L,"Symptoms",l ,Chl) , clearwindow, shiflwindow(l 5), clearwindow, chk(Ch0,Ch,Ch 1 ), pfault(Ch0,Ch,Chl ,Fno,Faultunit), shifiwindow(l 9), clearwindow, writeCThe problem may be in ",Faultunit),nl, shiflwindow(15), getsol(Ch0,Ch,Ch 1 ,Fno).
Table 4. Prolog code for checking the inputs of a suspected faulty unit
chkinputs(Ch0,I 1 ,I2):- confirminput(Ch0,I 1 ,I2,X,Y,Z), shiflwindow(14), clearwindow, shiftwindow(l 6), clearwindow, write(Z),nl, shiftwindow(17), clearwindow, write(Y),nl, readln(Ans), ans(Ch0,Ans,X),
fail. chkinputs(__,_,__).
au thors ' laboratory. However , the design of the expert system is general , in the sense that it can be imple- mented for aiding in the diagnosis of any other elec- t ronic equ ipment up to replaceable functional unit level, by merely changing the contents of the know- ledge base. The extensive knowledge-encapsula t ion feature o f the expert system has taken the guesswork out of equ ipment fault diagnosis. It helps the technician in t roubleshoot ing the equ ipment in a systematic and accurate way.
Acknowledgements--The authors wish to thank Sri. S. L. N. Achuryulu, Director, Defence Metallurgical Research Laboratory and Dr D. Banarjee, Associate Director, for their encouragement and constant support. Thanks are also due to Dr R. Sundareshan, Head, Forge Technology, and Shri D. R. K. Rao, Head Instrumentation Group.
REFERENCES
1. Rowland J. C. and Jain L. C. Knowledge based system for Instrumentation diagnosis, system configuration and circuit and system design. Engng Applic. Artif. Intell. 6, 437-466 (1993). 2. Milne R. Strategies for diagnosis. IEEE Trans. Systems, Man, Cyber, SMC-17, 333-339 (1987).
3. Davis R. Diagnostic reasoning based on structure and behaviour. Artif. lntell. 24, 347-410 (1984).
4. Shum S. K., Davis J. F., Punch W. F. and Chandrashakaran B. An expert system approach to malfunction diagnosis in chemical plants. Comput. Chemical Engng 12, 27-36 (1988).
5. Beraft W. R., Guo D. Z., Lee P. L. and Newell R. B. Fault diagnosis strategies for chemical plant: a review of competing technologies. 14th Int. Symp. Process System Engng, Montebello, Quebec, Canada, pp II 12.1-II 12.5 (1991).
6. Cantone R. R. Model-based probabilistic reasoning for electron- ics troubleshooting. Artificial Intelligence in Maintenance (Edited by Richardson J.). Noyes Publication (1985).
7. Vaidyanathan G., Sharma S. and Petry F. E. Learning diagnostic expert system for plasma arc welding machines. SPIE 1293 (Appli- cations of Artificial Intelligence VIII), pp. 95-102 (1990).
8. Goh Wee Leng and Lau Kim Teen. ESPRCM--an expert system for personal computer repair and maintenance. Engng Applic. Artif. Intell. 5, 121-133 (1992).

T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT 361
Sample User Session APPENDIX
FORGE PRESS ELECTRONICS FAULT DIAGNOSIS Trouble Shooting Guide
In which of the following systems is the fault?
SYSTEMS
front_panel_p~ess front_paneLmanipulator front~eLmouitoring control_desk_press control_deskmanipulator motor._controLcenter junker_panel marx_panel
FORGE PRESS ELECTRONICS FAULT DIAGNOSIS
Which of the following UNIT is faulty?
UNITS
control..vohage ground fauit ahrmjeset pre=pilot filter_6 leadc_oil cooling_valve c~rcu~fion bomt_l boo,t_2 ~otl pilot_2 main_l main_2 scrvo systcm_stop_prcss press_enable_disable
Continued overleaf

362 T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT
FORGE PRESS ELECTRONICS FAULT DIAGNOSIS
What is the problem in main_l? SYMPTOMS
Main 1 Pump NOT ON. Main 1 Pump NOT STOPPING. Main 1 Pump TRIPPING
FORGE PRESS ELECTRONICS FAULT DIAGNOSIS
QUESTIONS
Are circulation boost & pilot pumps ON?
GUIDE-LINES
The circulation, boost & pilot pumps should be running for switching ON main pump.

T. SATYANARAYANA et al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT 363
FORGE PRESS ELECTRONICS FAULT DIAGNOSIS
QUESTIONS
Is 24 V regulated DC supply present? y
GUIDE-LINES
Check voltage at L2.4 & L1.10. If no voltage check wiring as per drg. no. 1219.23 & ensure 24 V at L2.4 & Ll.10.
FORGE PRESS ELECTRONICS FAULT DIAGNOSIS PROBLEM
The problem may be in traie_module_T_l
If triac T_I is NOT ON (LED OFF)
Replace with spare triac.
If triac T_I is ON (LED ON)
Check wiring as per drg.no.1219.23.
Is the problem you started with solved7
SOLUTIONS
A U T H O R S ' B I O G R A P H I E S
T. Satyanarayana has been a scientist with the Defence Metallurgical Research Laboratory, Hyderabad, India, since 1985. He acquired a post-graduate degree in Electronic and Communications Engineering by Research, from the Jawaharlal Nehru Technological University, Hyderabad, India, in 1983. He is currently working in the area of artificial intelligence applications in the metallurgical industry.

364 T. SATYANARAYANA el al.: FAULT DIAGNOSIS OF ELECTRONIC EQUIPMENT
G. Subramanyam is a post-graduate in Computer Science from the University of Mysore, India. He joined the Defence Metallurgical Research Laboratory, Hyderabad, India, in March 1990. His area of interest includes expert systems and database management systems. K. V. Rama Rao obtained a Ph.D. from the Indian Institute of Technology, Kharagpur, India, in Computational Fluid Mechanics, and joined the Defence Research Development Organisation in 1979. His areas of interest include CFD, expert systems and their applications. He is presently with the Defence Metallurgical Research Laboratory, Hyderabaad, India.