Embed Size (px)
Citation preview

Improved techniques for studying the temporal and spatialbehavior of fish in a fixed location
John E. Ehrenberg and Tracey W. Steig
Ehrenberg, J. E., and Steig, T. W. 2003. Improved techniques for studying the temporal andspatial behavior of fish in a fixed location. – ICES Journal of Marine Science, 60:700–706.
There are many situations when it is important to know accurately the behavior of fish asa function of time and space in a fixed, three-dimensional volume. One example is theoptimal design of techniques that minimize the mortality of fish approaching hydroelectricdams or the cooling intakes of a power plant. The behavior of fish in other fixed volumes,such as estuaries and open rivers, is also of interest in the case of many migrating fishstocks. Both active (echosounding) and passive systems based on acoustic-emitting tagsimplanted in fish have been used to collect behavioral data. Active acoustic systems,including those with electronically and mechanically steered beams, only insonify a smallpart of the total volume of interest at any given time. Tag systems, on the other hand, can beused to monitor the behavior of tagged fish over the entire volume. A number of advancesin the implementation, deployment, and analysis of acoustic-tag systems have been madeover the past few years. These improvements include techniques for positioning optimallythe receiving hydrophones to minimize the location measurement errors, the developmentof acoustic-signal waveforms that provide both unique target identification and accuratelocation estimates, and the development of tracking algorithms that associate and track themultiple returns from an individual fish. These various techniques are described. Guidelinesare presented for selecting the various parameters for the tag system, including the positionsof the hydrophones. Specific examples that compare the predicted and actual performanceof the tag systems are described.
� 2003 International Council for the Exploration of the Sea. Published by Elsevier Science Ltd. All rights
reserved.
Keywords: acoustic tags, fish behavior, fish movement, fish tracking, position accuracy.
J. E. Ehrenberg, and T. W. Steig: Hydroacoustic Technology Inc., 715 NE Northlake Way,Seattle, WA 98105 6429, USA. Correspondence to J. E. Ehrenberg: tel.: þ1 206 633 3383;fax: þ1 206 633 5912; e-mail: [email protected].
Introduction
Many studies have been conducted on monitoring the
movement and behavior of fish using acoustic tags. Early
studies were conducted with adult Pacific salmon (Onco-
rhynchus spp.), observing the upstream migrations (Tre-
fethen, 1956; Johnson, 1960). Other studies were performed
with juvenile Chinook salmon smolts (Oncorhynchus
tshawytscha) in the Columbia River (Ledgerwood et al.,
2000) and with juvenile Atlantic salmon smolts (Salmo
salar), as they migrated through lochs, rivers, and estuaries
in the United Kingdom and Canada (Thorpe et al., 1981;
Solomon and Potter, 1988; Potter et al., 1992; Moore, 1995;
Lacroix and McCurdy, 1996; O’Dor et al., 1998; Russell
et al., 1998; Smith et al., 1998; Voegeli et al., 1998; Carr,
2000). The first reported fixed-tracking system was in-
stalled in a loch in Scotland (Hawkins et al., 1974). The
location of fish was recorded every 15min in order to
determine its movement during night and day. The authors
concluded that if the system could be automated, the po-
sition of the fish could be determined every second, and the
swimming path of each fish could then be displayed.
One automated-tracking system has been deployed in the
channels between Passamaquoddy Bay and the Bay of
Fundy in the Atlantic Ocean (Lacroix and Voegeli, 2000).
Another system has been developed for tracking fish on the
seafloor at ocean depths of up to 6000m (Bagley et al.,
2000).
Many improvements have been made in recent years
with the use of acoustic tags and automated tracking to
monitor the swimming path of a fish every second. A
tracking system has been developed and used for the past
four years at Rocky Reach and Rock Island dams on the
Columbia River (Steig et al., 1999, 2001, 2002; Steig,
2000; Steig and Timko, 2000). Other similar studies using
this tracking system have been conducted at Lower Granite
ICES Journal of Marine Science, 60: 700–706. 2003doi:10.1016/S1054–3139(03)00087-0
1054–3139/03/000700þ07 $30.00 � 2003 International Council for the Exploration of the Sea. Published by Elsevier Science Ltd. All rights reserved.

Dam on the Snake River (Steig and Timko, 2001),
Bonneville Dam on the Columbia River, North Fork Dam
on the Clackamas River (Timko et al., 2001), Cowlitz Falls
Dam on the Cowlitz River, and Chittendon Locks on the
Washington Ship Canal (Timko et al., 2002). These studies
utilized up to 32 omni-directional hydrophones placed in
known locations. The acoustic-tag system determines the
location of the tag, using the relative arrival time of the
acoustic signal at a minimum of four hydrophones. Studies
have been conducted in a Scottish loch to compare the
theoretical position with the measured one (Smith et al.,
1998). Using simulations, Kell et al. (1994) showed that the
accuracy of the position measurements obtained with an
acoustic-tag system depended on a number of factors. A
direct method has also been developed for calculating the
positional accuracy of the location of acoustic tags without
the need for field measurements or Monte Carlo simulations
(Ehrenberg and Steig, 2002). This article expands on the
improved techniques for monitoring the movement of
acoustically-tagged fish through space and time.
Theory of operation for tag-location,measurement systems
The operating principle of acoustic-tag systems is the same
as that which accurately determines position via the Global
Position Satellites (GPS) network. The acoustic tag trans-
mits a signal that is received by at least four hydrophones.
By knowing the positions of the four hydrophones, and
measuring the relative arrival times of each signal at each
hydrophone, it is possible to estimate the locations of the
tagged fish. In particular, if we let hix, hiy, hiz specify the x,
y, z location of the i(th) hydrophone, and let Fx, Fy, Fzspecify the unknown x, y, z locations of the tagged fish,
then the travel time from the tagged fish to the i(th)
hydrophone, ti is given by
ti ¼1
c
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðhix � FxÞ2 þ ðhiy � FyÞ2 þ ðhiz � FzÞ2
q
where c is the speed of sound. Unfortunately, we cannot
measure the absolute travel time directly. We can, however,
measure the differences between the arrival times of the
signal at the various hydrophones (ti�tj) as given by
ti � tj ¼1
c
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðhix � FxÞ2 þ ðhiy � FyÞ2 þ ðhiz � FzÞ2
q�
�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðhjx � FxÞ2 þ ðhjy � FyÞ2 þ ðhjz � FzÞ2
q �:
For four hydrophones, there are three such distinct
‘‘signal-arrival-time’’ difference equations. The system of
non-linear equations is determined by solving for the
tagged-fish coordinates, Fx, Fy, Fz, such that the mean-
squared difference between the measured (left side of the
above equation) and calculated time differences (right side
of the above equation) are minimized. There are various
algorithms for accomplishing the minimization.
If the arrival-time differences could be measured
perfectly and if the locations of the receiving hydrophones
and the speed of sound were known perfectly, the approach
described above would provide an exact measurement of
the location of the tagged fish. Unfortunately, the arrival-
time measurements will be inaccurate due to noise and the
values assumed for the hydrophone locations, and the speed
of sound will not be exactly right. Approaches for
minimizing the errors are described in the next section.
The acoustic signal on the direct path always arrives at
a given hydrophone prior to any multi-path signal. Signal
discrimination that determines the first signal arriving at
each hydrophone is used to eliminate most multi-path
signals prior to position calculations. If the direct signal is
not detected at a given hydrophone, then detection of
a delayed multi-path signal may result in systematic bias of
the position estimates.
Minimization of the errors in thedetermination of tagged-fish location
There are two strategies that can be used to minimize the
error in the measurement of the tagged-fish location. First,
the type of acoustic signal transmitted by the tag and the
associated signal processing in the acoustic receiver can be
selected to minimize the error in the measured signal arrival
time. Second, the hydrophone geometry can be chosen such
that the sensitivity of the fish-position estimate to
measurement errors in the signal arrival times is minimized.
The effects of added noise on the arrival-time estimates
at a receiver have been analysed for a variety of commu-
nications, sonar and radar applications. It has been shown
(Ehrenberg and Steig, 2002) that the standard deviation in
the arrival time due to added noise is given by
rrms ¼1ffiffiffiffiffiffiffiffiffiffiffiffi
SNR0
pBW
where SNR0 is the ratio of the signal power to noise power
out of the receiver-matched filter, and BW is the baseband-
signal bandwidth. In the case of the standard-pulsed,
continuous-wave (CW) signal, BW is the reciprocal of
the pulse duration T. For example, a 1-ms long CW signal
has a baseband bandwidth of 1/0.001¼ 1000Hz. If the
received-signal level is 10 times greater than the noise
standard deviation out of the matched filter (SNR0¼ 100
(20 dB)), then using this equation the standard deviation of
the arrival-time measurement is 0.1ms. With a CW pulse
and a given transmitted acoustic-power level compared
with the background-noise level, the standard deviation of
the arrival time is determined. If one attempts to increase
the signal-to-noise ratio by transmitting a longer pulse, the
required bandwidth is decreased as the inverse of the pulse
duration, and the denominator in the equation for the
standard deviation remains constant. Similarly, if a shorter
701Temporal and spatial behavior of fish in a fixed location

pulse is used with a wider bandwidth, the increase in the
bandwidth is cancelled by a decrease in the signal-to-noise
ratio. The way to minimize this limitation is to use
a wideband signal waveform rather than a CW pulse. The
two types of wideband waveforms used in acoustic systems
are the FM slide or ‘‘chirp’’ and the binary-coded signal. In
both cases, a special type of receiver processing called
matched filtering must be implemented. The use of FM
slides for active acoustic systems was discussed in
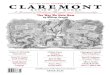
Ehrenberg and Torkelson (2000). An example of the type
of modulation used for binary-coded signals is given in
Figure 1.
When processed using a matched filter, this particular
coded signal has a pulsewidth of about 7.5% of that of an
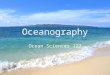
equivalent CW pulse. The matched-filter outputs for the
CW pulse and the coded signal are shown in Figure 2. The
much narrower output of the matched filter for the coded
signal results in a much smaller variance in the arrival-time
estimate and a corresponding reduction in the measurement
error of the fish location.
In addition to using signal waveforms that minimize the
effect of noise, techniques have been developed for selecting
hydrophone locations that are relatively insensitive to errors.
Previous approaches have used simulations to determine the
effect of hydrophone locations on the accuracy of the fish-
location estimate. However, this process is extremely time
consuming. The alternative approach is to use a differential
analysis to derive an expression relating the arrival-time
errors and the estimated fish-position error. The details of
this derivation are contained in an earlier article (Ehrenberg
and Steig, 2002). Using the results of this analysis, it is rela-
tively easy to locate the hydrophones optimally to produce
minimal errors. Some examples are presented in the subse-
quent discussion.
Tag system implementation
Acoustic tags selected for these studies were 307 kHz
encapsulated, omni-directional pingers. The tags were 18-
mm long and 6.5-mm in diameter (0.71� 0.26 inches) and
were encapsulated with a non-reactive, inert, low-toxicity
resin compound commonly used for potting electronic
circuitry. The weight of each tag was 1.5 g (0.053 oz) in air
and <1.0 g (0.033 oz) in water. Transmit-power level was
approximately 155 dB re 1lPa@1m. Pulse rates and pulse
widths were programmable. The tags utilized encoded
pulses, which increased the detection range, the signal-to-
noise ratio, and the pulse-arrival resolution, resulting in
decreased position variability. Nominal pulse intervals
range from 1 to 6 s per pulse, with transmit pulsewidths
of 0.5–3.0ms. Once activated, the useful life of the tag has
been found to extend up to 30 days, depending on operating
parameters.
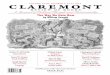
Pulse-rate encoding is used for detecting individual tags
when multiple tags are simultaneously present within the
coverage area. Up to 50 tagged fish can easily be tracked
simultaneously by the tag receiver without confusion
between the individual tags. Figure 3A, B is an example
of echograms of the same detected signals from 24 tags
operating simultaneously. The procedure for isolating the
signals from a given tag follows from the method used for
displaying the signals themselves. Each vertical scan in the
plot shows the detected arrivals in a time window equal
to the programmed pulse-repetition period of a particular
tag. The horizontal axis corresponds to the scan number.
For these plots, the number of scans along the horizontal
axis corresponds to 1 h of data collection. The upper plot
(Figure 3A) uses a time window of 4090ms. Only signals
from the tag programmed with this period will fall along a
straight line. The lower plot (Figure 3B) is for the same
dataset, but displayed using a time window of 5290ms.Figure 1. Example of a modulation used for binary-coded, wide-
band signal.
Figure 2. Matched-filter outputs showing the CW pulse and the
coded signal.
702 J. E. Ehrenberg and T. W. Steig

By using a simple tracking procedure for the data shown
on these plots, all the arrival times for a particular tag
can be isolated.
Predicted position error andhydrophone position
The error analysis described by Ehrenberg and Steig (2002)
can be used to optimally select the locations of the
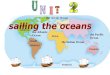
hydrophones. The error contours for two hydrophone
geometries shown in Figure 4 are an example of this.
Figure 4A shows the predicted position error of a four-
hydrophone array spaced approximately 15m apart in the X,
Y, and Z directions with two near-surface hydrophones and
two bottom hydrophones (square-box geometry). Figure 4B
shows the predicted position error of a four-hydrophone
array spaced approximately 15m apart in the X and Y
directions, but only 3–4m apart in the depth (flat-box
geometry). The position error in the center of the array in the
square box (Figure 4A) is approximately 0.3m. However,
the position error in the center of the array of the flat box
(Figure 4B) is much greater, approximately 0.5m. In
addition, the position error increases dramatically towards
the corners of the box. Obviously, the position error is much
smaller for a hydrophone array that is nearly square as
compared with the one configured in the shape of a flat box,
and the errors are much smaller in the interior of the box.
Predicted position error and field results
To verify consistent three-dimensional tag positioning over
time (precision), a test was performed using a stationary tag
Figure 3. An echogram of detected signal arrivals over a 1-h time period plotted using time windows of (A) 4090ms and (B) 5290ms. The
returns from a tag with a period equal to the time window used fall along a straight line.
703Temporal and spatial behavior of fish in a fixed location

within a hydrophone array at Mayfield Dam on the Cowlitz
River (Zapel et al., 2001). The tag was fixed to a rigid
aluminum pole, which was positioned near the center of the
hydrophone array, and its transmissions were monitored for
19min. Of the 1140 individual pings produced by the tag
(60 pings per minute for 19min), three-dimensional
solutions were derived for 1084 of the pings (95%).
Physical measurements determined that the tag was located
at a position of 8.641m in the X-dimension, 13.914m in the
Y-, and .876m in the Z-dimension (depth). The calculated
measurements derived from the hydrophone array were in
agreement with the physical measurements, which in-
dicated that the array was accurately surveyed in place and
was functioning correctly.
The standard deviations of the three-dimensional posi-
tions were compared with the calculated standard devia-
tions (see Table 1). The measured standard deviation of the
arrival time of the tag signal at the four hydrophones was
used for calculating the predicted-position standard de-
viation. The actual and predicted-position standard devia-
tions were similar in the X (0.155 versus 0.165m) and Y
(0.139 versus 0.144m) dimensions. The actual and
predicted-position standard deviations for the Z dimension
were greater than those in the X and Y dimensions, but the
difference in the position error was still within 8.5 cm.
Merging fish swimming-path resultswith river-flow data
Figure 5 shows how the three-dimensional tag data can be
used to study the swimming path of a fish relative to the
river flow. The water velocity in this example was estimated
from a kinematic-flow model based on actual river-flow
data. This kinematic model was calibrated and verified with
actual river-velocity measurements. The water velocity is
represented by color, with the blue shades corresponding to
0.0–0.3ms�1 water velocity, the green shades 0.3–0.8ms�1,
and the yellow/red shades 0.8–0.9ms�1.
Figure 4. The predicted three-dimensional positional error near the center of each array with a Z-dimension hydrophone spacing of
(A) 15m (approximating a square-box configuration) and (B) 4m (a flat-box configuration).
Table 1. The predicted- and actual-position standard deviation ofa stationary tag at Mayfield Dam on the Cowlitz River in 2001. Thehydrophones were located at positions (0.88, 18.96, 0.98 m), (13.64,18.67, 9.67 m), (7.32, 1.27, 9.67 m), and (7.39, 1.27, 0.98 m).
Position’s standard deviation (m)
X (m) Y (m) Z (m)
Actual (n¼ 1084) 0.155 0.139 0.259Predicted 0.165 0.144 0.174
704 J. E. Ehrenberg and T. W. Steig

Figure 5 shows the path of a steelhead smolt released on
the morning of 14 May 1999. This fish followed the water-
velocity contour of 0.8ms�1 downstream to near the
powerhouse wall. It then traveled perpendicular to the
water flow until it reached the slow back eddy (<0.3ms�1),
where it turned again and travelled downstream toward the
end of the powerhouse. It ultimately passed into Unit 1.
Conclusions
Technological advances in the implementation and deploy-
ment of fish-tracking systems using acoustic tags have
enhanced the utility of these techniques greatly. The use of
coded pulses and matched-filter processing, for example,
has been shown to significantly improved the accuracy of
the tag-position measurements. Then again, data-processing
methods for isolating the signals from individual tags allow
many fish to be tracked simultaneously. Finally, analytical
techniques that predict the tag-position error as a function
of hydrophone placement are being used to select the
optimal hydrophone placement prior to system deployment.
In combination, these technological advances are providing
an accurate technique for monitoring fish behavior in fixed
spatial regions.
References
Bagley,P. M., Bradley, S., Collins, M. A., Priede, I. G., and Gray,P. 2000. Miniature acoustic code activated transponder fortracking fish at abyssal depths using delayed activation toovercome reverberation. Advances in Fish Telemetry. Proceed-ings of the Third Conference on Fish Telemetry in Europe,Norwich, England, 20–25 June 1999.
Carr, J. 2000. Atlantic salmon (Salmo salar L.) smolt migrationpatterns in the dam-impacted St. John River system. Advancesin Fish Telemetry. Proceedings of the Third Conference onFish Telemetry in Europe, Norwich, England, 20–25 June1999.
Ehrenberg, J. E., and Steig, T. W. 2002. A method for estimatingthe position accuracy of acoustic fish tags. ICES Journal ofMarine Science, 59: 140–149.
Ehrenberg, J. E., and Torkelson, T. C. 2000. FM slide (chirp)signals: a technique for significantly improving the signal-to-noise performance in hydroacoustic assessment systems. Fish-eries Research, 47: 193–199.
Hawkins, A. D., MacLennan, D. N., Urquhart, G. G., and Robb, C.1974. Tracking cod, Gadus morhua, in a Scottish sea loch.Journal of Fish Biology, 6: 225–236.
Figure 5. A plan view of Rocky Reach Dam showing the swimming path of a steelhead smolt overlaid by the water-velocity contours as it
approaches the powerhouse in the spring of 1999.
705Temporal and spatial behavior of fish in a fixed location

Johnson, J. H. 1960. Sonic Tracking of Adult Salmon at BonnevilleDam, 1957. Fishery Bulletin 176. United States Fish andWildlife Service, Washington, DC.
Kell, L. T., Russell, I. C., and Challis, M. J. 1994. Proceedings ofthe IFM 25th Annual Study Course, pp. 269–288. University ofLancaster.
Lacroix, G. L., and McCurdy, P. 1996. Migratory behavior of post-smolt Atlantic salmon during initial stages of seaward migration.Journal of Fish Biology, 49: 1086–1101.
Lacroix, G. L., and Voegeli, F. A. 2000. Development of auto-mated monitoring systems for ultrasonic transmitters. Advancesin Fish Telemetry. Proceedings of the Third Conference on FishTelemetry in Europe, Norwich, England, 20–25 June 1999.
Ledgerwood, R. D., Ryan, B. A., and Iwamoto, R. N. 2000.Estuarine and nearshore-ocean acoustic tracking of juvenilespring chinook salmon smolts from the Columbia River. Advan-ces in Fish Telemetry. Proceedings of the Third Conference onFish Telemetry in Europe, Norwich, England, 20–25 June 1999.
Moore, A. 1995. The migratory behavior of wild Atlantic salmon(Salmo salar) smolts in the estuary of the River Conwy, NorthWales. Canadian Journal of Fish and Aquatic Sciences, 52:1923–1935.
O’Dor, R. K., Andrade, Y., Webber, D. M., Sauer, W. H. H.,Roberts, M. J., Smale, M. J., and Voegeli, F. M. 1998.Applications and performance of Radio-Acoustic Positioningand Telemetry (RAPT) systems. Hydrobiologia, 371/372: 1–8.
Potter, E. C. E., Solomon, D. J., and Buckley, A. A. 1992.Estuarine movements of adult Atlantic salmon, Salmo salar L.,in Christchurch Harbour, southern England. In WildlifeTelemetry: Remote Monitoring and Tracking of Animals, pp.400–409. Ed. by I. G. Priede, and S. M. Swift, Ellis HorwoodLtd, Chichester.
Russell, I. C., Moore, A., Ives, S., Kell, L. T., Ives, M. J., andStonehewer, R. O. 1998. The migratory behaviour of juvenileand adult salmonids in relation to an estuarine barrage.Hydrobiologia, 371/372: 321–333.
Smith, G. W., Urquhart, G. G., MacLennan, D. N., and Sarno, B.1998. A comparison of theoretical estimates of the errorsassociated with ultrasonic tracking using a fixed hydrophonearray and field measurements. Hydrobiologia, 371/372: 9–17.
Solomon, D. J., and Potter, E. C. E. 1988. First results with a newestuarine fish tracking system. Journal of Fish Biology, 33(A):127–132.
Steig, T. W. 2000. The use of acoustic tags to monitor the move-ment of juvenile salmonids approaching a dam on the ColumbiaRiver. Proceeding of the 15th International Symposium onBiotelemetry, Juneau, Alaska, 9–14 May 1999.
Steig, T. W., and Timko, M. A. 2000. Using acoustic tags formonitoring juvenile chinook and steelhead migration routes in
the forebay of Rocky Reach Dam during the spring and summerof 1999. Report to Chelan County PUD No. 1, Wenatchee, WA,by Hydroacoustic Technology, Inc., Seattle, WA.
Steig, T. W., and Timko, M. A. 2001. Feasibility study: assessingthe viability of using acoustic tags for three-dimensionalpositioning at Lower Granite Dam. Report to U.S. GeologicalSurvey, Columbia River Field Station, Cook, WA, by Hydro-acoustic Technology, Inc., Seattle, WA.
Steig, T. W., Adeniyi, R., Iverson, T. K., and Torkelson, T. C.1999. Using acoustic tags for monitoring fine-scale migrationroutes of juvenile salmonids in the forebay of Rocky Reach Damin 1998. Report to Chelan County PUD No. 1, Wenatchee, WA,by Hydroacoustic Technology, Inc., Seattle, WA.
Steig, T. W., Horchik, J. W., and Timko, M. A. 2001. Monitoringjuvenile chinook and steelheadmigration routeswith acoustic tagsin the forebay of the powerhouse and spillway of Rocky ReachDam in 2000. Report to Chelan County PUD No. 1, Wenatchee,WA, by Hydroacoustic Technology, Inc., Seattle, WA.
Steig, T. W., Horchik, J. W., and Tritt, G. W. 2002. Monitoringjuvenile chinook salmon migration routes with acoustic tags inthe forebay of Rock Island Dam in 2001. Report to ChelanCounty PUD No. 1, Wenatchee, WA, by HydroacousticTechnology, Inc., Seattle, WA.
Thorpe, J. E., Ross, L. G., Struthers, G., and Watts, W. 1981.Tracking Atlantic salmon smolts, Salmo salar, through LockVoil, Scotland. Journal of Fish Biology, 19: 519–537.
Timko, M. A., Nealson, P. A., Brush, T. D., and Huen, R. 2001.Approach, congregation areas, and passage of acousticallytagged spring chinook smolts in the forebay of the North ForkDevelopment, Clackamas River, Oregon. Report prepared forPGE, Portland, OR and Clackamas River Project Fish PassageTechnical Subgroup by Hydroacoustic Technology, Inc., Seattle,WA and Normandeau Associates, Inc.
Timko, M. A., Nealson, P. A., and Johnston, S. V. 2002. Usingacoustic tags for monitoring adult Chinook salmon behavior atthe Chittendon Locks, summer 2000. Report to U.S. Departmentof the Army Corps of Engineers, Seattle, WA, by HydroacousticTechnology, Inc., Seattle, WA.
Trefethen, P. S. 1956. Sonic equipment for tracking individual fish.Special Scientific Report—Fisheries Number 179. United StatesFish and Wildlife Service, Washington, DC.
Voegeli, F. A., Lacroix, G. L., and Anderson, J. M. 1998.Development of miniature pingers for tracking Atlantic salmonsmolts at sea. Hydrobiologia, 371/372: 35–46.
Zapel, E., Molls, T., Johnston, S. V., Nealson, P. A., and Timko,M. A. 2001. Cowlitz River Project Mayfield Dam fish guidancelouver evaluations. Report to Tacoma Public Utilities, Tacoma,WA, by Northwest Hydraulic Consultants, Inc. and Hydro-acoustic Technology, Inc., Seattle, WA.
706 J. E. Ehrenberg and T. W. Steig