Embed Size (px)
Citation preview

Headquarters ) Instrument Fly"'ng Department of the Army ~þ\ ~:::i~:t:~~lbC
.. K;)~lv.,J. and Navigation 15 December 1984 þJY V~~ð- for Army Aviators
FM 1..240
~(þvel~r1>~~t ~..,e.-
.
~(~II~ I~ UU1'(~IIt.'II\ '~I (~UI\ U\I~G ~I.III>UD ,",UlIlll 01 JI"UIO ~\'
.. .. ............., ::::::::::::::::;:::::::::::::::i::::::: ""'"'''''''''''' ...,............. . . . . . . . . . . .. .


A New Way
With this printing, FM 1-240 appears for the first time as an UPDATE publication and the information in it is up-to-date as of 15 December 1984. This UPDATE printing supersedes the previous standard version of FM 1-5 dated 7 July 1980.
The objective of UPDATE is to reduce the administrative burden on you, the user, and to improve the communications value of Army publications. Under UPDATE, a publication is printed at regular ly schedule d times, and each printing includes all the recent changes made to the publication since its last printing. You might say that UPDATE publications are throw-away books: you simply discard the old issue when you get the new one. Under UPDATE, the "posting" of publications is a thing of the past.
A Summary of Change located at the front of this publication describes how the contents have changed since the previous printing of FM 1-5. You should read this Summary of Change before using this publication.
" ,
The subscription card inserted in this publication is a specially developed reply oard for ordering the exact number of copies that your unit needs. (If the inserted card is mislaid, you will find a
duplicate printed on the last page of this issue.) You should complete Part 1 of this card to tell your publications clerk how many copies your section needs. Your publications clerk must then complete Part 2 by consolidating your unit's total requirements on a
single subscription card. You should establish a definite subscription requirement right away. If you delay, you may not receive the number of copies you need the next time FM 1-240 is printed.
Another card is enclosed for you to tell us what you think about this UPDATE. We are continually working to improve our publications and we want you to be part of this work. Please complete the enclosed card and simply drop it into the mail box.
The Editors


..
~QJJ~~~~YtiICHANGE
F!' 1-240 'Instrucent Flyinc and Navication for Army Aviators
This field IJnnual GiveE infor~ation on instru~ent flyin" and navieation for Army aviators. It has been revised to repl~ce FL 1-5. Other r;;ajor cb~r.[;es include--
0 Addition of a neli first cbapter, Illusions in Flight.. Tbis cbapter should hel~ the aviator understand and cope with thG various illusions encountered io flicht.
0 Deletion' of tl:e chapters on the Doppler IJavigation Set, COLH.Je.nd HaviLation Syster;!, and Inertial Navication Set AI'/ASI:-86. These systeQs aré covered extensively in their respective operator's nanuals.
0 Addition of cew data to the InstruDent Approacb Procedure Charts (chap 17). The new data are compiled from nUrJerous fliCht information publications and shoulc Breatly belp aviators with instrument approach procedures.
0 Expansion and upd~tin[ of appendix D, Instrument Fli~ht PI a nni ne.
0 Addition of a newly devised series of sYLbols for clearance shorthand (a Pi> D). These sy",bcls should aid in copyinr; cl earance s.
I I k

UPDATE Change Highlighting
The two techniques shown below are used to help readers identify new changes in administrative publications.
1.
UPDATE Cancel and Underscore Technique
Original text as it appeared in the base publication:
The quick brown fox jumped over the lazy dog.
UPDATE Tint Technique
1.
Text as it appeared in the last UPDATE issue:
Chapter 12 Reporting Equipment Ideas, Problems and Warranty Claims
12-1. General This chapter tells you how to make and submit:
a. Warranty Claim Actions (WCAs). b. Equipment Improvement Recom-
mendations (EIRs). .
c. Quality Deficiency Reports (QDRs).
12-2. Warranty Claim Actions a. Purpose. DA Form 2407 is used to
send in WCAs for items with bad components, parts, or assemblies covered by a factory warranty. DA Form 2407 is also used to get payment for labor used replacing the bad items.
b. Identity of end items under warranty is shown by a decal plate, data plate, and labels.
c. All warranty actions, settled or not, are reported to the national level on DA Form 2407. Report local warranties settled with DA Form 2407 with the words "For Information only" written in block 16a. See Appendix F.
2.
Change text as it appears in a
current UPDATE issue:
The quick bffiWM gray fox jumped "V"I' on the lazy dog.
-
2.
Restructured change text as it
appears in this UPDATE issue:
(
3.
Fresh text as it will appear in the next UPDATE issue:
The quick gray fox jumped on the lazy dog.
3.
Fresh text as it will appear in the next UPDATE issue:
Chapter 12 Reporting Quality Deficiencies, Ideas, Equipment Improvement Recommendations and Warranty Claims
( ,
12-1. Generat This chapter tells you how to make and submit:
a. Quality Deficiency Reports and suggest ideas and recommendations for improving equipment on the SF Form 368.
b. Warranty claim actions (WCA's) for items with bad components, parts, or assemblies covered by a factory warranty. Use the DA Form 2407 for WCA's.
12-2. Reporting Quality Deficiéncles and Equipment Improvement Recommendations
a. The SF Form 368 is a multi-use form used for reporting:
\.

Supersession Notice: This UPDATE volume supersedes the standard format, bound edition of FM 1-5 dated 7 July 1980.
Dlstrfbutlon: Special distribution of this issue has been made in accordance with DA Form 12-11A requirements for field manuals. The number of copies distributed to a given subscriber is the number of copies requested in Blocks 1 through 8 of the subscriber's DA Form 12-11A.
Subscription Information: Valid account holders must submit the enclosed subscription card if they want to receive future issues of this UPDATE. The subscription card will also be used to either increase or decrease their present quantity.
Resupply: Umited copies of this UPDATE publication are available from the Baltimore Publications Center. Complete DA Form 4569, USAAGPC Requisition Code Sheet accordingly.
Locator Sheets: Until all field manuals are converted to the UPDATE format, the sequence of a "library" can be maintained by inserting this publication in the appropriate looseleaf binder where other publications are stored.
Editorial Comments: This UPDATE publication contains editorial comments that are not in the original standard field manuals. These comments were inserted when there was a need to clarify the placement of an element of text (for example, the location of a
referenced table).
TII,silthesiOl'l81ure oi 81'1 AtmyUPDATE publlaliol'l
Tile relu.onu.,p or pel'l 81'1d bOOk in tll'$ mark d~picts printed commun,catIOI'IS- IdIlil$dl15l!minðlud rapidlYÐl'ldaccuttltely 11'1 an 8!;onomically IfldÐe5thetically bel'lef,cj!lm;jlnner to !lerooe arJd to be col'IVl!ni~nlly uRld by a 1!tI"ljeiudial'lCe
Instructions for comp~tlng the subscription card inserted In this volume.
PART 1: This section is for internal use within your unit. The Baltimore AG Publications Center ignores this portion of the card.
PART 2: PubJicat;on Account Number (Insert 5-digit account number. The first block will be a letter and each succeeding block will be a number.) If you do not have an established account and wish to open one, complete DA Form 12. Quantity Required (Insert total number of copies your unit requires.)
Name/Address of Un;! (Insert full name, address, and zip code as it appears on the labels that you receive on mailings from the Baltimore AG Publications Center.)
UPOATL Sl.IbSCRll'Tlo,\I
"ART 1, fOR COMPLETION 8Y unA OF PUBLICATION Reco'dcOpy 'oqu"ern,nhlo, VOU'tKban P",co'dtaunot publ'ca.'onclo'klorcan,ohd"'''''otIO'''wIHc''þ,"on ....quuem,n,
111_0 a'_lOan. NumÞlt, 01 COP'" d""red 'o<.oc"""""
PART 2. fOR CQMPUnON BV UNIT PYÐllCATIOJrI CURK U.. ""0 ot ,t....ca,d. ,a conool,o;IIto,1I oochan 'oqu,....,.n1l '''.0 an, unil IUb"ttplian.lh.......,I,mmod.....,v
N..-..IAck!'lUoIUM
-----"'-. -- ---- -- O"'O~"U'3:'U'U',
-- Publi"'lja"C"r~.. Thole block.
""" ~
-- lillod
NOTE: In addition to the loose card that is inserted in this UPDATE, a duplicate 01 the card is printed on the last page of this issue.

Preface
This manual is prepared specifically for Army aviators. It presents the fundamentals,
procedures, and techniQUes for attitude instrument flying and air navigation. it also
serves as a guide and reference for-
a. Fixed-wing and rotary-wing aviator students during their primary and advanced
stages of training.
b. Academic instructors in presenting instructional material.
c. Instructor pilots in reinforcing the students' fundamental knowledge of instrument
flying and navigation.
d. Flight evaluators in evaluating the students' fundamental knowiedge of instrument
flying and navigation.
e. Rated aviators during their instrument instructor pilot or fiight examiner training.
This manual is organized into two basic areas: attitude instrument flying and air
navigation.
a. Chapters 1 through 5 cover the following:
(1) illusions in fiight.
(2) Flight instruments and their systems.
(3) In-flight forces and sensations.
(4) Instrument maneuvers and interpretation.
(5) Aircraft coordination maneuvers.
b. Chapters 6 through 21 cover the foiiowing:
(1) Basic concepts and the use of the implements of air navigation which assist in
pianning and conducting a flight by means of dead reckoning navigation or pilotage.
(2) Radio navigational aids and their empioyment in flight.
(3) Facilities and procedures peculiar to instrument approaches.
This manual has been reviewed for operations security (OPSEC) considerations.
15 DECEMBER 1984 UPDATE' FM 1-240

Headquarters Department of the Army Washington, DC 15 December 1984
*Field Manual 1-240
Instrument Flying and Navigation for Army Aviators
This UPDATE printing publishes a revision which is effective 15 December 1984.
Because the structure of the entire revised text has been reorganized, no attempt has
been made to highlight changes from FM 1-5, dated 7 July. 1980.
By Order of the Secretary of the Army:
JOHN A. WICKHAM, JR.
General, United States Army Chief of Siaff
Official:
DONALD J. DELANDRO Brigadier General, United States Army The Adjutant General
Applicability. This manual applies to
Army aviators in the Active Army, US
Army Reserve, and the Army National Guard.
Placement of tables, figures, and appendixes. Full page tables, figures, and appendixes (in that order) included in UPDATE printings are normally located following the last chapter of the publication. Less than full page tables and figures will be placed, when possible, where first cited in the text.
User information. The proponent agency of this manual is the US Army Aviation Center. Submit changes for improving this publication on DA Form 2028 (Recommended Changes to Publications and Blank Forms) through the aviation unit commander to the Commander, United States Army Aviation Center and Fort Rucker, ATTN: ATZQ- TD-P-PM, Fort Rucker, AL 36362-5000.
Distribution. Special distribution of this issue has been made in accordance with DA Form 12-11 A requirements fOI field manuals. The number of copies distributed to a given subscriber is the highest single number of copies requested in blocks 1 through 8 01 the subscriber's DA Form 12-11 A.
Contents (Listed by paragraph pnd page numbers)
Chapter 1
Illusions in Flight General '1-1,5 Sensory systems for orientation. 1-2, 5
Illusions leading to spatial disorientation '1-3, 5
Demonstrations of spatial disorientation' 1-4, 5
Prevention of spatial disorientation '1-5, 7
Illusions leading to landing
errors. 1-6, 7
Prevention of landing errors from visual illusions' 1-7, 9
Chapter 2
Flight Instruments and Systems General'2-1,9 Section I
Magnehsm Basic magnetism' 2-2, 9
Earth as a magnet. 2-3, 9
Magnetic compass' 2-4, 10
Compass errors. . 2-5, 10
Section II Gyroscopes Gyroscopic principles' 2-6, 12 Gyroscopic mountings' 2-7, 12 Gyroscopic properties' 2-6, 12 Gyroscopic instrument power
sources' 2-9, 12 Vacuum driven gyroscopes '2-10,12 Electrically driven gyroscopes' 2-11, 12
Section /1/
Attitude Indicators Operation' 2-12, 13 Power sources' 2-13, 13
Construction. 2-14, 15 Operation errors' 2-15, 15
Section IV Turn-and-Slip Indicators
Operation' 2-16, 16
Turn needle '2-17,16 Bali '2-18,16 Section V
Slaved Gyro Compass Systems. Operation '2-19,16 Components' 2-20, 16
Section VI
The Pitot-Slatic System Operation' 2-21, 18 Impact pressure' 2-22, 19 Static pressure' 2-23, 19
Section VII Altimeters Pressure altimeter' 2-24, 19 Construction' 2-25, 20 Altimeter indications' 2-26, 20 Effect of nonstandard temperatuns and
pressures' 2-27, 21
Altimeter settings' 2-28, 22 Types of altitude' 2-29, 23 Radar altimeter' 2-30, 25
Section VIII The Airspeed Indicator
Construction' 2-31, 26 Operation' 2-32, 26 Airspeeds' 2-33, 26
Seclion IX The Vertical Speed Indicator Construction' 2-34, 26 Operation' 2-35, 26 Instrument lag' 2-36, 26
DISTRIBUTION RESTRICTION. This publication contains technical or operational information that is for official Government use onlyDistri. bution is limited to US Government agencies. Requests from outside the US Government for release of this publication under the Freelbm of Information Act or the Foreign Military Sales Program must be made to HQ TRADOC, Ft Monroe. VA 23651-5000.
*ThiS fIe1d-manual-sup'ersetles FM 1"-5, 7 Ju1y 1'980.
15 DECEMBER 1984 UPDATE. FM 1-240

Contents-Continued
Adjustment. 2-37, 27 Instantaneous vertical speed
indicator' 2-38, 27
Chapter 3
Power, Pitch Attitude, and Bank Control Through Instruments
General' 3-1, 27
Section I
Fundamental Skills Attitude controi . 3-2, 27 Instrument cross-check' 3-3, 27
Trim. 3-4, 27
Section 1/
Power Control
Lift. 3-5, 27
Power instruments' 3-6, 27 Constant airspeed' 3-7, 29 Con slant allitude . 3-6, 29 Power variation. 3-9, 31
Power setting' 3-1 0, 31
Power inslrument cross-check '3-11,31
Section II/ Pitch Attitude COn trot Attitude instrumenls . 3-12, 32 Attitude indicalor . 3-13, 33 Altimeter '3-14, 34 Verticai speed indicalor '3-15,35 Airspeed indicator' 3-16, 36 Pitch altitude Irim . 3-17, 36 Pitch altitude instrumenl cross-
check' 3-1 6, 36
Section tV Bank Attitude Control Straighl flighl . 3-19, 37 Altitude indicator' 3-20, 37 Heading ic1icalor . 3-21, 37
.
Turn-and-slip indicalor . 3-22, 32 Bank attitude Irim . 3-23, 39 Bank instrumenls . 3-24, 39
Chapler 4
Basic Instrument Maneuvers General' 4--1 ,
39
Section I
Fixed Wing
Maneuver perlormance .4--2, 39 Inslrument lakeoff . 4-3, 40 Straight-and-Ievel flighl .4--4, 40 Slraighl climbs and descents. 4-5, 40 Level lurns . 4-6, 41
Turns 10 headings' 4--7, 42 Steep lurns . 4-8, 42 Timed turns' 4-9, 43 Climbing and descending
lurns . 4-10, 44 Compass turns' 4--11 ,
45 Unusual atlitudes . 4-12, 45
Section 1/
Aotary Wing AII-wéalher operalions . 4--13,47 Maneuver performance' 4-14, 47 Instrumenllakeoff . 4-15,47 Slraighl climb' 4--16, 47 Straight-and-Ievel flighl . 4--17, 49 Straight descenls '4--18,51 lurns '4~19,52'
-
2
Level lurns . 4-20, 52 Turns 10 headings' 4--21, 54 Compass lurns . 4-22, 54
Steep lurns . 4--23, 54 Timed lurns . 4--24, 54 Climbing lurns . 4-25, 55
Descending lurns . 4--26, 57
Unusual attiludes and recoveries. 4-27, 57
Aulorolations . 4-28, 57 Acceieralions and
decelerations' 4-29, 57
Chapter 5
Coordination Maneuvers General' 5-1, 59 Verlical Sand S-1 . 5-2, 59
Paltern A . 5-3, 59
Paltern B . 5-4, 61
Chapter 6
Air Navigation General' 6-1, 62
Section I
Measuring the Earth in Space Shape' 6-2, 62 Rotation' 6-3, 62 Revolution' 6-4, 62 Inclinalion . 6-5, 62
Section 1/
Measuring Position on the Earth
Coordinates' 6-6, 63 Circles on a sphere' 6-7, 64 Reference circles on the earlh . 6-8, 65 Equalor . 6-9, 65 Parallels' 6-10, 65 Meridians. 5-1.1, 65 Lalitude and longitude' 6-12, 65
Section II/ Measuring Direction on the Earth Poinls . 6-,13, 65 Compass' 6-14, 65 Course' 6-15, 66 Rhumb line '6-16,66 Measurement. 6-17,68 Greal circle' 6-18, 68
Chapter 7
Navigation Charts General' 7-1,68
Section I
Chart Projections Scale' 7-2, 68 Distortion' 7-3, 68 Characlerislics . 7-4, 68 Graticule '7-5, 70 Projection' 7-6, 70
Lamberl conformal projection' 7-7,71 Mercalor projeclion . 7-8, 72 Polar stereographicprojeclion .7-9, 74
Section 1/
Aeronautical Charts Seclional aeronaulical charls . 7-10,74 World aeronautical charls '7-11,75 Photomaps' 7-12,75
. Täctiêarp~otage-c11arts '7-"13,75
t5 DECEMBER 1984 UPDATE. FM 1-240
Operational navigational
charls '7-14,75
Chapter 8
Plotting and Measuring General. 8-1, 75 Pencils and erasers" 8-2, 75 Dividers' 8-3, 75 Plotters' 8-4, 75
Chapter 9
Instruments Used for Dead Reckoning Navigation
General' 9-1,77 Magnetic compass' 9-2, 77 Gyro heading indicator' 9-3, 78 Slaved gyro system. 9-4,78 Airspeed indicator' 9-5, 76 Free air temperalure gage' 9-6, 78 Altimeter' 9-7, 76 Clock '9-8, 78
Chapter 10 Wind and Its Effects General' 10-1, 78 Wind' 10-2, 78 Correction. 10-3, 80 Poinlsto remember' 10-4, 80 Prob1ems . 10-5, 80 Ground speed '10-6, 80
Chapter 11
The Dead Reckoning Computer General '11-1,81
Section I
Slide Rule Face Slide rule' 11-2, 81
Distance conversion -11-3,83 Simple proportion' 11-4, 84 Time-distance '11-5,84 Ground speed' 11-6, 84 Time required' 11-7, 84
Dislance determination '11-8, 64 Use of the 36 index' 11-9, 84 Gallons and pounds
conversion. 11-10, 85 Rate of fuel consumption '11-11, 85 Maximum range '11-'12,85 Airspeed compulations . 11-13, 86 Density altitude' 11-14, 86 Altilude computations' 11-15, 86 Off-course correction
(rule of 60) '11-16,86 Drift correction '11-17, 87 Radius of action (fixed base) '11-18, 87
Section 1/
Wind Problems Disk and correction scales '11-19,88 Reversible grid' 11-20, 88 Wind Iriangle construclion '11-21,89 Wind triangle solulion . 11-22, 90 Wind problems' 11-23, gO
Heading and ground speed computation '11-24,91
True airspeed computation' 11-25, 91
Wind velocity computation' 11-26, 92
Reported wind correction '11-27,93 Wind 1riangle variations .11 ~28,"94 .

Contents-Contlnued
Chapter 12 Radio Principles General' 12-1, 94 Wave transmission. 12-2, 95 Direct and alternating current. 12-3, 95 Radio waves' 12-4, 95 Principles of the transmitter. 12-5, 96 Principles of the receiver. 12-6, 97 Classification of frequencies' 12-7, 98 Low frequency radio wave propagation
(nondirectional) . 12-8, 98 Skip distance' 12-9, 99 Effect of all matter on
radiation 012-10, 99 Effect of static upon low and medium
frequency reception' 12-11, 99 General nature of high frequency
propagation (3,000 kilohertz to 30 megahertz) . 12-12, 99
General nature of VHF and UHF propagation (30 to 3,000 megahertz) . 12-13, 99
Chapter 13 VHF Omnidirectional Range (VOR)
System General' 13-1, 99
Section I Components and Operation Static interference' 13-2, 99 Transmitter and receiver
fundamentals' 13-3, 100 VOR receivers '13-4, 100 VOR course indicators '13-5, 101 Radio magnetic indicator. 13-5, 103
Section /I Flight Procedures Operation' 13-7, 103 VOR positions '13-8, 103 Orientation '13-9, 104 VOR stations' 13-10, 104 Station passage' 13-11, 108 Position checkpoints' 13-12, 110 Course interception '13-13,112 Estimating time and distance to a
station '13-14, 114
Section //I Receiver Checks Accuracy '13-15, 115 Radiated test signal' 13-16, 115 Other ground checks '13-17, 115 Airborne check' 13-18, 115 Dual VOR receivers' 13-19, 115 Unpublished receiver check '13-20, 116 Course deviation indicator sensitivity
check '13-21, 116
Section IV VOR Station Classification Classes. 13-22, 116 Classification by reception
capabilities' 13-23, 116
Section V
Area Navigation
Components' 13-24, 116 Operation' 13-25, 117 Waypoints . 13-26, 117-
RNAV routes' 13-27, 117 '
RNAV approaches' 13-28, 118
Chapter 14 Automatic Direction Finder (ADF) and
Manual Loop Procedures General '14-1, 118
Section I Characteristics and Components Receiver spectrum' 14--2, 118 Classification' 14--3, 118 Receiver components' 14-4, 118
.
Section /I Automatic Direction Finder Flight
Procedures Orientation procedure '14--5, 118 Courses to a station' 14-6, 119 Station passages. 14-7, 119 Courses from a station '14-6, 120 Identification of fixes. 14--9, 120 Interception inbound '14--10,120 Interception outbound '14--11, 122 Time and distance from an ADF
station. 14--12, 122
Section //I Automatic Direction Finder Flight
Procedures Using Relative Bearings Relative bearing '14--13, 123 Orientation (fixed card) . 14--14, 123 Station passage
(fixed card) . 14--15, 123 Courses to a station (fixed card) '14--16,
124 Homing '14--17,124 Courses from a station (fixed
card) '14-18, 125 Positions (fixed card) '14--19, 126 Interception inbound (fixed
card) '14--20,127 Interception OU1bound (fixed
card) '14--21,128 Determination of time and distance from
a station (fixed card) "14-22, 128
Section IV Manual (Loop) Operation of the ARN-59 Operation '14--23, 128 Orientation. 14--24, 128
Null. 14--25, 129 Determination of time and distance from
a station. 14-26, 129
Beacon '14--27,129
Chapter 15
Tactical Air Navigation (TACAN) General '15-1, 130 Frequencies and ground
equipment. 15-2, 130 Signal patterns' 15-3, 130 Distance measuring
equipment. 15-4, 132 TACAN characteristics '15-5, 132 AN/ARN-103 TACAN '15-6,135 Navigational procedures '15-7, 135 Station passage' 15-8, 135 Ground speed checks '15-9, 135
,Intersecti<;>ns . 15-.10, 136
15 DECEMBER 1984 UPDATE 'FM 1-240
TACAN arcs '15-11, 136 TACAN holding' 15-12, 143
Chapter 16 Instrument Approach Procedures General '16-1,143 Section I
Instrument Approaches Identification of procedures' 16-2, 143 Units of measurement '16-3, 143 Aircraft categories' 16-4, 143 Instrument approach
procedure' 16-5, 144 Straight-in approaches' 16-6, 145 Instrument approach with procedure
turn '16-7, 146
Section /I Feeder Routes/Standard Terminal Arrival
Routes Feeder routes '16-8, 147 Publication. 16-9, 147 Execution '16-10, 147
Section 11/
Procedure Turns Use of procedure turns '16-11,147 Typical patterns '16-12,148 Procedure turn area' 16-13, 149 Obstruction clearance-minlmum
altitude' 16-14, 149 The 45-degree procedure
turn '16-15, 149 Missed approaches '16-16,151
Section IV Holding Patterns Definition '16-17, 153 Configuraiion '16-18,153 Timing '16-19,153 Airspeeds' 16-20, 153 Tums '16-21, 154 Entry' 16-22, 154
Departure' 16-23, 155 Drift correction' 16-24, 156 Clearances and reports' 16-25, 157 Stacking' 16-26, 158 Instrument approach
briefing '16-27,158
Chapter 17 Instrument Approach Procedure
Charts General '17-1, 159 Legend pages. 17-2, 159 Concentric rings '17-3, 159 Chart format. 17-4, 159 Margin identification .17-5,159 Plan views' 17-6, 159 Profile views '17-7, 160 Minimums section '17-8, 110 Alternate airport. 17-9, 160 Stra1ght-in minimums . 17-H, 161 Circling minimums' 17-11, 16 1 Missed approach '17-12, 111
Procedural component operation '17-13,161
Runway visual range (RVR) _minimums '17.-14, 1ß1 '
~

Contents-Contlnued
Chapter 18 VHF Omnidirectional Range (VOR)
and Nondirectlonal Beacon (NDB)
Approaches General. 18-1, 176
Section I
Typical VOR Approach
VOR approach chart. 18-2, 176 VOR station location. 18-3, 177 Initial contact and arrival . 18-4~ 177 Holding. 18-5, 177
Descent. 18-6, 179
Approach. 18-7, 179 Landing. 18-8, 180 Missed approach. 18-9, 180
Section /I Typical NDB Approach NDB approach chart. 18-10, 180 Arrivai .18-11, 182 Entry to holding. 18-12, 182 Holding .18-13,183 Descent .18-14,184 Intermediate and final
approach. 18-15, 184
Chapter 19
Instrument Landing System General .19-1,185
Section /
Components Ground components. 19-2, 185
Section /I Operation
Localizer .19-3, 185 Glide slope. 19-4, 187 Marker beacons and compass
locators. 19-5, 189
Arrival. 19-6, 190
Front course approach.18-7, 192
Localizer only approach. 19-8, 192
Localizer back course
approach. 18-9,192 Runway visual range 019-10,192 The visual approach slope indicator
(VASI) .19-11, 194 Simplified directional facility (SDF) and
localizer-type directional aid (LOA) .19-12, 194
Chapter 20 Radar General. 20-1, 196
Section I
Radar Capabilities, Uses, and Limitations
Operatlon.20-2, 196 Primary radar. 20-3, 197
Secondary radar. 20-4, 197 Air route surveillance radar. 20-5, 197
Airport surveillance radar. 21)....6, 197
Limitations. 20-7, 197
Section /I Radar Air Traffic Control Procedures
identification.20-8, 198
Transfer of radar control (handoff) .20-9, 198
Enroute control procedures.. 20-10,.196
4
Departure and arrival control
procedures. 20-11, 199
Radar approaches. 21)....12, 199
Monitoring of nonradar
approaches. 21)....13, 199
VFR traffic expanded radar
service. 20-14, 201
Radar assistance within air defense identification zones. 20-15, 201
Section /II
Transponders Capability. 20-16, 201
Phraseology. 20-17,201
Section IV
Ground Weather Radar Operation .20-16,202 USAF pilot-to-metro service
(PMSV) .20-19, 202 FAA weather radar
advisories. 20-20, 202
Chapter 21
Tactical Instrument Flight
General. 21-1, 203
Section J .
Tactical Emp/oyment Considerations
Tactical instrument flight. 21-2,203 Training. 21'-3,203 Principles of employment. 21-4, 203
Flight altitudes 021-5,204 Flight routes. 21-6, 205
Section /I
Tactica/lnstrument Flight Pfanning
Initial planning. 21-7, 206 Preflight planning. 21-8, 206
The course line. 21-9, 206
Minimum enroute altitude. 21-10, 207
Takeoff planning.21-11, 211
Approach procedures .21-12, 214
Holding procedures. 21-13,218 Missed approach procedures. 21-14,
219 .
Emergency procedures. 21-15, 219
Section /II
Aviator Training
Training programs . 21~16, 221
Flight training for tactical instrument flight .21-17, 221
Appendixes
A. References, 222
B. IFR Flight Planning, 223
C. Sample Program of Instruction for
Tactical Instrument Flight, 225.
D. ATC Shorthand Symbols. 228
Glossary, 231
. Index, 223
15 DECEMBER 1984 UPDATE. FM 1-240

Chapter 1
illusions In Flight
1-1. General An illusion or false impression occurs when information provided by the sensory organs is inadequate or misinterpreted. Many illusions in flight can be created by complex motions and visual scenes which aviators encounter under adverse weather conditions and at night. Some of these illusions may lead to spatial disorientation or inability to determine accurately the altitude or motion of the aircraft in relation to the earth's surface. This chapter provides the basic knowledge aviators need to understand the various illusions encountered in flight, to respect their serious consequences, and to cope with them effectively.
1-2. Sensory systems for orientation Three sensory systems are used for orientation-the visual system, the motion-sensing system in the inner ear, and the position-sensing system involving nerves in the skin, muscles, and joints.
a. Vision is the major sense for orientation. Under visual meteorological conditions (VMG). aircraft altitude is
determined by observing the earth's surface, which usually provides accurate and believable visual information. However, under instrument meteorological conditions (IMG), aircraft altitude can be determined accurately only by observing and interpreting flight
instruments. b. The .bsence of reliable visual
information causes a person to become more aware of information provided by motion-sensing and position-sensing systems. Unfortunately, the sensations of motion and position during various flight maneuvers are often quite misleading; the tendency is to believe them rather than information from the flight instruments,
1-3. illusions leading to spatial disorientation
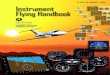
a. The most hazardous illusions leading to spatial disorientation are created by information received from the motion-sensing system in each inner ear. This fluid-filled system consists of three semicircular tubes connected to a sac. Sensory organs in the tubes detect angular acceleration of the pitch, yaw, and roll axes, whereas a sensory organ in the sac detects gravity and linear acceleration. In flight, the motion-sensing system may be stimulated by aircraft motion alone or by the combination of head and body movement with it.
Unfortunately, the system is not capable of detecting a constant velocity or small changes in velocity (fig 1-1). Neither is it
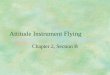
capable of distinguishing between centrifugal forceßig 1-2) and gravity.
The motion-sensing system, though functioning normaliy in flight, can also produce faise sensations. For example, the process of decelerating while turning in one direction can produce the sensation of turning in the opposite direction. This illusion can be corrected only by using adequate outside visual references or by properly reading flight instruments, thus oVPrriding the sensations from the inner ear.
b. The major illusions leading to spatial disorientation are described below.
(1) Leans illusion. A banked altitude to the left, for example, may be entered too slowly to activate the fluid in the "roll"
. semicircular tubes. An abrupt correction of this altitude can set the fluid in motion and create the illusion of a banked attitude to the right. The disoriented pilot may make the error of roliing the aircraft back into the original left-banked attitude or, if level flight is maintained, wili feel compelied to lean to the left until this illusion subsides.
(2) Coriolis illusion. An abrupt head movement during a prolonged constant- rate turn may set the fluid in motion in
more than one semicircular tube. This creates the strong iliusion of turning or accelerating in an entirely different axis. The disoriented pilot may maneuver the aircraft into a dangerous altitude in an attempt to correct this illusion.
(3) Graveyard spin illusion. In a
prolonged spin, the fluid in the semicircular tubes in the axis of the spin will cease its motion (fig 1-1). The deceleration that occurs during recovery to ievel flight will again set this fluid in
motion. This creates an illusion of spinning in the opposite direction. The disoriented pilot may return the aircraft to its original spin.
(4) Graveyard spiral illusion. In a
prolonged, coordinated, constant-rate turn, the fluid in the semicircular tubes in
the axis of the turn will cease its motion (fig 1-1). An observed loss of altitude in
the aircraft instruments and the absence of any, sense of turning may create the illusion of descending with the wings level. The disoriented pilot may pull back on the controls, thus tightening the spiral and increasing the loss of altitude.
(5) Somatogravic illusion. A rapid acceleration during takeoff overstimulates the sensory organs for gravity and linear acceleration and creates the illusion of being in a nose-up attitude. The disoriented pilot may push the aircraft into a nose-low or dive attitude. A rapid deceleration by quick power reduction can have the opposite effect. The disoriented pilot may pull the a.ircraft into a nose-up or stall attitude.
(6) Inversion illusion. An abrupt change from climb to straight-and-Ievel flight can overstimulate the sensory organs for gravity and linear acceleration. This cr(>ates the illusion of tumbling.
15 DECEMBER 1984 UPDATE. FM 1-240
backwards. The disoriented pilot may push the aircraft abruptly into a nose-low altitude and possibly intensify this illusion.
(7) Elevator illusion. An abrupt, upward, vertical acceleration, as can occur in a helicopter or an updraft, can shift vision downwards (visual scene moves upwards). This acceleration overstimulates the sensory organs for gravity and linear acceleration and creates the illusion of being in a climb. The disoriented pilot may push the aircraft into a nose-low attitude. An abrupt, downward, vertical acceleration, usually in a downdraft, has the opposite effect. The disoriented pilot may pull the aircraft into a nose-up attitude.
(8) False horizon illusion. A sloping cloud formation, an obscured horizon, a
dark scene spread with ground lights and stars, and certain geometric patterns of ground lights can create the illusion of a
faise horizon. These provide inaccurate visual information for aligning the aircraft correclly with the actual horizon. The disoriented pilot may place the aircraft in a dangerous altitude.
(9) Autokinesis illusion. In the dark, a
stationary light will appear to move when stared at for many seconds. The disoriented pilot could lose control of the aircraft in attempting to align it \fIith the false movements of this light.
(10) Flicker vertigo illusion. A hypnotic or soporific effect can be induced by regular flashing of a light, such as an anticollision or strobe light at nig,t. The effect can also be induced by ciou ds or r010r blades interrupting a bright light, such as the sun. Flicker vertigo s most pronounced during long flights vith few attitude or directional changes and can cause the disoriented pilot to experience temporary immobilization.
1-4. Demonstrations of spatia disorientation
a. Spacial disorientation can is experienced in some controlled aircraft maneuvers. Each maneuver willnormally create a specific illusion. Howewr ~ any faJse sensation is an effective demonstration of disorientation. rhus, should there be no sensation dUing any maneuver, the absence of sensrtion is still an effective demonstration il t hat it
shows inability to detect bank orroll. (1) Climbing while acceleratin;. While
the student has his eyes closed, th e
instructor pilot maintains approa:h airspeed in a straight-and.leveillti tude for several seconds and then accelerates while maintaining tilt attitude. The usual illusion crea~d during this maneuver, without visual reerences, is that the aircraft is climbing.
(2) Climbing while turning. Whle the student's eyes remain closed an! the aircraft is in a straight-and-Ievel'ttitude, the instructor pilot executes, witi a
relatively slow entry, a well-coojinated 5

Our motion.sensing system is
located in each inner ear in the
approximate position shown.
SemicIrcular TuDes
~: Enlarged, this system is shaped about as shown. II contains tluid
and the sensory organs tor
detecting angular acceleration and gravity and linear acceleration.
GRAVIH AND LINEAR ACCELERATION ANGULAR ACCELERATION
The semicircular tubes are arranged at appro)(i~
mateJy right angles to each other in the roll, pitch
and yaw axes.
A sensory organ tor detecting gravity and linear
acceleration is located in the bottom and side ot tne sac. It consists of small sensory hairs that prO)eCI
upward into a gelatinous substance containing chalk -like crystals. The weight borne by these
sensory hairs changes with every head movemenl with respect to gravity and with every linear accel- eration (up, down, left, right, lorward, backward). 50 causing the sensation of tilting the head or body.
Q "0\\- .~ /
.~+ ,-1\" ~ / ~ "
'. .
-,/ ," ~. : '--,. P'''h -::,;', \~. 1;
"'$~- ~. . ~.. ----- .
"
Yow - ...
A sensory organ, which consists of small sensory hairs that project, into a gelatinous substance, is
localed in each lube. When the head starts to turn (angular acceleration) or speeds up, slow down. or stops its turning. the sensory hairs in the tube in the
axis of turning are temporarily deflected due to the motion of the tluid lagging behind the motion 011hl;'
lube wall. This causes the sensation of turning.
.....'" "..-
:....-.:;:';'~~- ~"c,;>'"-
~'~o.' co o. ,:;.""
~... ""',,',.' 010 i
'ø~P~...~ '. \ ~,'. ,.,,,.-.....
-
o$.~---T' .
"<:'~_\~-'.;
Sensory r,alrs TuDf:
NO TURNING
Nn sensation
CONSTANT RATE TURN !\to sensation aHer 11l~ld
aCC07lelates W same speed .15 WDe wall
6
" , ,
r
J
START OF TURN
Sensation of turning as
moving ilLJIO deflec1s 't'1alrs -;:'~- .~ ."~,,. ";.~.-_o;'\" Ç> '. --..,.,,~ , "
,
~--'\.0\ri::~ ,.,.\-.. .",
. .->-:=
'......... ~'
~~.~ -.-~
~~(""'.--'~~ \ ", \'
) I" I: .........
TURN STOPPED Sensation 01 1urnlng In
opposl1e dlreC110n a's mo,', Ing fluid deflec1s t'1alr
In opposl1e direction
Figure 1-1. Motion-sensing system
15 DECEMBER 1984 UPDATE' FM 1-240

~ (ij) lðJ STRAIGHT lEVEL COORDINATED TURN PUllOUT
~. !hi Skid. slip. and imperfect @ turn feel alike. Pilot feels
,.j ",--.j " he is being forced side-
ways in his seat. lEVEL SKID FORWARD IMPERFECT
SLIP TURN
turn of about 1 1;2 positive G, for 90 degrees. The usual illusion created during this turning maneuver without visual references and under the effect of the slight positive G is that the aircraft is climbing. On sensing the climb, the student should immediately open his
eyes and see that a slowly established, coordinated turn produces the same feeling as a climb.
(3) Diving while turning. This sensation can be created by repeating the procedure in (2) above except that the student's eyes should remain closed until
recovery from the turn is about half
completed. When the eyes are closed, the usual illusion is that the aircraft is diving.
(4) Tiltinq to right or left. While the aircraft is In a straight-and-Ievel attitude and the student's eyes are closed, the instructor pilot executes a moderate or slight skid to the left with the wings or rotor system level. The usual illusion is
that the body is tilting to the right.
(5) Reversing of motion. This illusion can be demonstrated in any of the three pianes of motion. While the aircraft is in a straight-and-Ievel attitude and the student's eyes are closed, the instructor pilot smoothly and positively rolls the aircraft to about a 45-degree bank attitude while maintaining heading and pitch attitude. The usual illusion is a
strong sense ot rotation in the opposite direction. After this illusion is noted, the student should open his eyes and observe that the aircraft is in a banked attitude.
(6) Diving or rolling beyond the vertical plane. This maneuver may produce
extreme disorientation. While the aircraft is in a stralght-and-Ievel attitude, the student should sit normally with eyes closed or gaze lowered to the floor. The instructor pilot starts a positive, coordinated roll toward a 30-degree or 40-degree angle of bank. As the roll progresses, the student should tilt his
n
head forward, look to the right or left,
Figure 1-2. Sensations from centrifugal force
and immediately return his head to the upright position. The instructor pilot should time the maneuver so that the roll is stopped just as the student returns his head upright. An intense disorientation is usually produced by this maneuver, with the student experiencing the sensation of falling .downward in the direction of the roll.
b. The objectives in demonstrating
these various maneuvers are as follows: (1) Understand the susceptibility of the
human system to spatial disorientation. (2) Demonstrate that judgments of
aircraft attitude based on bodily
sensations are frequently false. (3) Lessen the occurrence and degree
of disorientation through a better understanding of the relationship between aircraft motion, head movements, and resulting disorientation.
(4) Instill greater confidence in relying
on flight instruments for assessing true aircraft attitude.
CAUTION: None of these familiarization maneuvers should be attempted at low altitude or without an instructor pilot.
1-5. Prevention of spatial disorientation
a. Action can be taken to prevent these illusions and their potentially disastrous consequences by-
(1 ) Always obtaining preflight weather briefings.
(2) Not continuing flight into adverse weather conditions or dusk or darkness unless proficient in the use of flight instruments.
(3) Ensuring that when outside visual references Bre used they are reliable, fixed points on the earth's surface.
(4) Avoiding sudden head movements, particularly during takeoffs, turns, approaches, and landings.
(5) Remembering that illness, medication, alcohol, fatigue, sleep ioss, and mild hypoxia are likely to increase susceptibility to spatial disorienta.tion.
.
15 DECEMBER 1984 UPDATE .FM 1-240
(6) Becoming proficient in using flight
instruments and reiying on them. b. The sensations that lead to illusions
during instrument flight conditions are normal perceptions experienced by normal individuals. These undesirable sensations cannot be completely prevented, but they can and must be ignored or sufficiently suppressed. This is
done by developing absolute reliance upon flight instruments to indicate the attitude of aircraft.
1-6. illusions leading to landing errors Of all the senses, vision is the most important for safe flight. However, surface features and atmospheric conditions encountered in landing can create iilusions of incorrect height above and distance from the runway threshold. The major illusions leading to landing
errors are described below.
a. Runway width illusions. A narrower than usual runway can create an illusion that the aircraft is at a higher altitude than it actually is (fig 1-3). This is especially true when runway length-to- width relationships are comparable. The pilot who does not recognize this illusion will fly a lower approach, possibly striking objects along the approach path or landing short. A wider than usual runway can have the opposite effect; the pilot
may level out high and land hard or overshoot the runway,
b. Runway and terrain slope illusions. An upsloping runway and upsloping terrain can create an illusion that tha aircraft is at a higher aititude than it
actually is (fig 1-4), The pilot who does not recognize this illusion will fly a lower approach. A downsloping runway and downsloping approach terrain can have the opposite effect.
c. Featureless terrain illusions. The absence of surrounding ground features can create an illusion that the aircraft Is
at a higher altitude than it actually is. This happens when the pilot is
approaching over water, darkened areas, 7

--- ~
----- ~ ;----
-
7-------
A ".rrower than uaual Nnway can create an lIIus60n Ihllt the aircraft II higher than It actuatly la,
teadlng the pilot to fly a lower approach.
---- --- A wtder thin usual runway can create an lIIus.on that the alrera" Is lower than It actually is. leading
. --I the pilot 10 fly higher approach. ~
----~~--~ ---------Þ ,.,~ NORMAL APPROACH .6 APPROACH DUE TO IllUSION
Figure 1-3. Runway width illusion
A.n upaloplng runway can create the illusion ~ that the aircra" is higher than it actually is, .
. .0
.. leading the pilot to fly a lower approach.. -
- -
- -
~. -~ - -
-- -- J L
Adownsloping runway can create the illusion that the aircralt is lower than it actually is, leading the pilot to fly a higher approach.
~ -
4=.' .g . NORMAL APPROACH .
APPROAC~ DUE TO ILLUSION
Figure 1-4. Runway and terrain slope illusion
8 15 DECEMBER 1984 UPDATE' FM 1-240

or terrain made featureless by snow. The pilot who does not recognize this illusion will fly a lower approach.
d. Atmospheric illusions. Rain on the windscreen can create an illusion of being at a higher altitude, and atmospheric haze can create an illusion of being at a greater distance from a
runway. The pilot who does not recognize these illusions will fly a lower approach. Fog penetration can create an illusion of pitching up. The pilot who does not recognize this iilusion will steepen the approach, often quite abruptly.
e. Ground lighting illusions. Lights .
along a straight path, such as a road, and even lights on moving trains can be mistaken for runway and approach lights. Bright runway and approach ligþting systems, especially where few lights illuminate the surrounding terrain, may create the iilusion of less distance to the runway. The pilot who does not recognize this illusion wiil fly a higher approach.
.
1-7. Prevention 01 landing errors Irom visual illusions Action can be taken to prevent these illusions and their potentially hazardous consequences by-
a. Anticipating the possibility of visual illusions during approaches to unfamiliar airports, particuiarly at night or in
adverse weather conditions. b. Conducting visual inspection of
. unfamiliar airports before landing.
c. Using the visual approach slope indicator (VASI) system for a visual reference And an electronic glideslope when they are available.
d. Recognizing that the chance of an approach accident increases when some emergency or other activity distracts from usual procedures.
e. Maintaining optimum proficiency in landing procedures.
f. Making frequent reference to the altimeter. This instrument should be a
primary aid during ail approaches-day or night.
Chapter 2
Flight Instruments and Systems
2-1. General The efficiency and utility of modern Army aircraft are largely dependent on their flight instruments and systems accurately depicting what the aircraft is doing in flight and how weli its power plants and components are functioning. Some of the most important instruments that are used for navigation are the magnetic compass, slaved gyro compass system, heading indicator, airspeed indicator, and altimeter. They show information conceming direction, airspeed, and
. Bltitude. The attitude Jndicatorailows the
aviator to control the aircraft by showing him the attitude of the aircraft in relation to the natural horizon. The performance of an aircraft in a given attitude and with a certain power is indicated by the airspeed indicator, heading indicator, altimeter, vertical speed indicator, and turn-and-slip indicator.
Section I
Magnetism
2-2. Basic magnetism A magnet is a piece of metal that has the property of attracting another metal. When freely suspended, a bar magnet will align in an approximate north and south direction. The force of attraction is
greatest at a point near the ends of the magnet-the poles. Lines of force flow out from each pole in all directions,
eventually bending around and returning to the other pole. The area through which these lines of force flow is cailed the field of the magnet. The end of the magnet that seeks north is cailed the North' Pole.
2-3. Earth as a magnet The earth is comparable to a huge magnet with the poles iocated severai hundred miles below the earth's surface. To use the magnetic compass effectively, some basic properties of magnetism and their effect on the instrument must be understood.
a. Location of magnetic poles. The magnetic poles do not coincide with the earth's geographic poles (fig 2-1). The approximate location of the north magnetic pole is 71 degrees north and 96 degrees west and the south magnetic
MAGNETIC
HORIZONTAL NORTH POLE
COMPONENT"" \ "'-0'-"", \ ".
VERTICAL COMPONENT
pole is 72 degrees south and 157 degrees east.
b. Dip angle. The lines of force in the earth's magnetic field are parailel to the earth's surface at the magnetic equator. They curve increasingly downward as they move closer to the magnetic poies. Usuaily, when a magnetic needle is placed on one of the lines of force (fig
2-1), it will assume the direction and position of the actual line of force. The earth's magnetic field has both horizontal and vertical components. Only the horizontal component Is used for direction finding. If a magnetic needle is
placed on a horizontal axis so that its vertical movement is free, it wiil dip zero degrees at the magnetic equator and 90 degrees at the magnetic poles. The magnetic compass is reliable until the dip angle exceeds 84 degrees in polar areas.
\ f'igure 2-1. Earth's ma9netlc field
15 DECEMBER 1984 UPDATE. FM 1-240 9

2-4. Magnetic compass The magnetic compass (fig 2-2) is
simple in construction and has a high reliability factor. Requiring no external
power source, it uses the earth's magnetic field to indicate the heading of
the aircraft. The compass card, which is
seen through the glass window of the
compass case, has letters for cardinal headings (N. S, E, and W) and numbers, with the last zero omitted, at each 30- degree interval. Mounted on the float with the compass card are two magnetized needies which align
themselves and the compass card with
the magnetic field of the earth. The float is pivoted on a pedestal attached to the bottom of the compass case or bowl. The bowl is filled with kerosene which provides lubrication, rust prevention, and a dampening action on the oscillations of the compass card. A vertical lubber (reference) line is mounted behind the glass face of the compass bowl. The heading of the aircraft is indicated by the
compass card letter or number appearing behind the lubber line. The compass also
contains a compass compensating assembly which is used to adjust (or swing) the compass.
TN MN
Figure 2-2. Magnetic compass
2-5. Compass errors a. Variation. In some types of
navigation, aeronautical chart computations are based on the relation
of a course to the true geographic North Pole. During flight, the magnetic compass points to the magnetic north
pole which is not the same location as the true North Pole. This angular
difference between true and magnetic
MN TN
VAR WHEN VARIATION IS EAST. IT IS SUBTRACTED THH:l60DI.VAR(10o E! . MH(0500)
north is known as magnetic variation.
Lines of equal magnetic variation, or isogonic lines, are shown on aeronautical charts in degrees of variation east or
west (fig 2-3). The line on a chart
connecting points of zero-degree variation is called the agonic line. Lines of equal magnetic variation are replotted
periodically to compensate for shifting of the poles or changes in local magnetic deposits.
b. Deviation.The magnetic compass is
influenced by nearby electrical
equipment and metallic objects which
cause the compass to deviate from its
normal readings. The difference between the compass readings in a particular
aircraft and those of an unaffected
compass at the same point on'the earth's surface is called deviation. To reduce this deviation, the compensating
assembly is adjusted I'\S much as possible. A deviation card is then prepared and mounted near the
compass. Figures from this card are applied to the indications of the compass so that a desired heading may be flown.
c. Magnetic dip. The tendency of the magnetic compass to point down as well as north in certain latitudes is known as
VAR WHEN VARIAtiON IS WEST. IT IS ADDED
, oW TH(06OQ).,. VAAOOoW) ':: MHW70o)
150 E
100 E
Figure 2-3. Lines of equal magnetic varIation in the United States
10 15 DECEMBER 1984 UPDATE. FM 1-240

magnetic dip. Magnetic dip is responsible
for the northerly and southerly turning
errors and for acceleration and deceleration errors on headings of east and west. At the magnetic equator, the vertical component of the earth's magnetic field is zero which does not affect the magnetic compass. When the aircraft is flying from the magnetic' equator to higher latitudes, the effect of the vertical component of the earth's magnetic field becomes more noticeable. Oniy errors in the Northern Hemisphere are discussed below; the exact reverse of these errors occurs in the Southern Hemisphere.
(1) Northerly turning error. Vertical dip tendency is not noticed in straight-and- level unaccelerated flight. The compass card is mounted so that its center of gravity (CG) is below the pivot point and it is well balanced in the fiuid. When the aircraft is banked, however, the compass card also banks because of the centrifugal force. While the compass card is in this banked attitude, the vertical component of the earth's magnetic field causes the north-seeking poles of the compass to dip to the low side of the turn, thus giving an erroneous turn indication (fig 2-4). This error is
most apparent on headings of north and south. When the aircraft is turning from a
heading of north, the compass briefly gives an indication of a turn in the
opposite direction and lags behind. When the aircraft is turning from a
heading of south, the compass indicates a turn in the proper direction, but at a
more rapid rate than is actually being . made.
(2) Acceleration error. Acceleration error is due to the action of the vertical
component of the earth's magnetic field. The pendulous-type mounting of the compass causes the compass card to tilt during changes in acceleration and pitch.
This momentary card deflection from the horizontal results in an error which is
most apparent on headings of east and west. When the aircraft is accelerating or establishing a descent on either of these headings, the error indicates a turn to the north. When the aircraft is
decelerating or establishing a climb, the
error indicates a turn to the south. If the aircraft is on a north or south heading while climbing, descending, or changing
speed, no acceleration error is apparent.
NOTE: Acceleration-north/decelera- tion-south (ANDS) is helpful in
remembering acceleration error. (3) Oscillation error. Rough air or poor
control technique causes erratic swing of the compass card and ,asults in
compass oscillation error. The fiuid in which the magnetic compass is
immersed is subject to swirl which may
create noticeable error. Also, the small size of the compass bowl restricts the use of efficient dampening vanes.
(4) Other errors. la) The earth's magnetic lines of flux
must be strong enough to cause a bar magnet, as in a compass, to align with
them. The magnetic compass is mounted so that when an aircraft is in straight-
and-level unaccelerated flight, the
vertical component of the earth's magnetic field has no effect on the compass indications. In the ex1reme latitudes near the North and South
Poles, the horizontal component of the earth's magnetic field is very weak and the compass may spin erratically or indicate improper headings.
(b) All magnetic compasses are constructed to compensate for disturbing magnetic influences within the aircraft. The compensating mechanism is
satisfactory when used with a deviation card as long as the deviation on any particular heading is constant. In modern aircraft, however, the deviation is seldom constant, so the use of the deviation card is limited. In the slaved gyro compass system, the remote compass transmitter is usually located in a wingtip
or vertical stabilizer away from aircraft electrical and other magnetic disturbances.
! ,
ì
---F~re 2-4. -Northerly turning error
15 DECEMBER 1984 UPDATE. FM 1-240
ì
11

Section II
Gyroscopes
2-6. Gyroscopic principles
A gyroscope (fig 2-5) is a wheel or rotor that is mounted to spin rapidly around an axis. It is also free to rotate about one or both of the axes that are perpendicular
to each other and to the axis of. spin. A
spinning gyroscope offers resistance (inertia) to any force which tends to
change the direction of the axis of spin.
The rotor has great weight (high density)
for its size and is rotated at high speeds;
therefore, it otlers a very high resistance to any applied force .
2-7. Gyroscopic mountings
a. Free. A freely (universally) mounted
gyroscope has three planes of freedom and is free to rotate in any direction about its center of gravity. The rotor, free to rotate in any plane in relation to the
base, spins so rapidly that its spin axis tends to remain in a fixed direction În
space. The freely mounted gyroscope uses the gyroscopic property of rigidity in
space. The flight instruments that use this type of mounting are the heading
indicator and the attitude indicator.
b. Semirigid. A semirigidly mounted
gyroscope is mounted so that one of the
planes of freedom is held fixed in
relation to the base. it uses the gyroscopic properties of rigidi~y in space and precession. The turn-and-slip indicator, a flight instrument, has a
gyroscope which is semi rigidly mounted.
2-8. Gyro3copic properties
a. Rigidity in space. When spinning,
the rotor remains in Its originai plane of
rotation regardless of how the base .is
moved. .
b. Precession. This is the resultant
action or deflection of a spinning rotor
when a deflective force is applied to its
rim. Precession is classified as real and
apparent.
(1) Real precession. This a positive
deflection caused dir',ctly or indirectly by
an applied force or forces. Because of
imperfect construction, such as imperfect balance of the rotor, bearing friction, and
friction in the mountings, any gyroscope
has some real precession. Other causes of real precession are centrifugal force, gravity force, acceleration, and deceleration.
(2) Apparent precession. A freely
mounted gyroscope maintains its axis
fixed in relation to space and not in
relation to the surface of the earth. As the earth rotates, carrying the gyro
mount around with it, the gyro spin axis
maintains its direction fn space. With
respect to the earth, the spin axis does change direction. This change in
direction is called apparent precession.
2-9. Gyroscopic Instrument power sources Most Army aircraft use electrical power to keep rotors of gyroscope instruments rotating continuously. At higher altitudes
and lower temperatures, electrically
operated gyroscopes have proven to be
more reliable than vacuum driven
gyroscopes.
2-10. Vacuum driven gyroscopes A few Army aircraft are still equipped with vacuum driven gyroscopes. In
vacuum driven gyroscopes, an engine
driven vacuum pump'reduces the
pressure within the case of a gyroscopic
instrument and outside air is then
allowed to enter the. oase through a filter
and nozzle. The nozzle directs a stream of air onto thè buckets recessed in the
rim of the rotor and causes rotor to turn. The speed of the rotor may vary from
10,000 to 18,000 RPM, depending upon the design 01 the instrument. Some multi engine aircraft have vacuum pumps
on more than one engine so that, if
either pump or engine fails, vacuum will
not be interrupted. Most modern single- engine aircraft do not have an alternate
source of vacuum. However, if an engine
fails and the propeller continues to
windmill, use of proper gliding speed will provide adequate vacuum for instrument
operation. A vacuum gage is located on the instrument panel to indicate the
suction (vacuum) in inches of mercury. A
suction from 3.75 inches to 4.25 inches of mercury will operate the vacuum- driven attitude indicator and the
directional gyro. A suction from 1.8 inches to 2.1 inches of mercury will
operate the vacuum-driven turn indicator.
If the vacuum reading should fall as low
as 1.8 inches of mercury, the aviator
knows that the attitude and heading
indicators are inaccurate, but the turn
indicator is accurate.
2-11. Electrically driven gyroscopes In electrically driven gyroscopes, the
rotor and stator of an electric motor are enclosed in a gyro housing and become, in effect, the gyro. The gyro or rotor is
operated on current supplied from the aircraft's electrical system. An advantage of this system is that the instrument case
can be hermetically sealed. This
eliminates the danger of moisture
condensation and keeps out foreign
material. When the gyro reaches operating speed, enough heat is
generated to ensure etlective lubrication
at altitudes where outside air
temperature is extremely low.
MODEL GYROSCOPE ROTOR AND iNNER GIMBAL ,GYRO.
~ .'"
ROTOR
Figure 2-5. Primary elements of a standard gyroscope
12 15 DECEMBER 1984 UPDATE. FM 1-240
GYRO AND OUTER GIMBAL

Section III Attitude Indicators
2-12. Operation The attitude indicator, with its miniature
aircraft representing the actual aircraft
and the horizon bar representing the actual horizon outside the aircraft, is the
only flight instrument that directly
displays the flight attitude of the aircraft. It simultaneously displays both the pitch
and the bank aftitudes of the aircrafl. It
has no lead or lag in aircraft attitude changes and instantly indicates even the smallest change in attitude.
2-13. Power sources Attitude indicators used in Army aircraft
are powered by an electrical source. Electrically operated attitude indicators (figs 2-6, 2-7, and 2-8) have warning flags which appear on the face of the instruments when electrical power is
interrupted.
A. INDICATOR FACE
\..( '~
".. I
xC() ~
C. ERECTION MECHANISM
Figure 2-6. The J-8 electric altitude Indicator
15 DECEMBER 1984 UPDATE. FM 1-240
B. GYR<I HOUSING AND COMPONENT PARTS
~

(RESERVED)
14 15 DECEMBER 1984 UPDATE. FM 1-240

Figure 2-7. Lear model electric attitude indicator 400SG
Figure 2-8. Navigation electric attitude Indicator 1D-882
15 DECEMBER 1984 UPDATE. FM 1-240
2-14. Construction Attitude indicators have a device to represent the natural horizon. The indicator may be a horizon bar, a horizon line, or a sphere or disk with a line separating a light color which represents the sky from a dark color which represents the earth. A banking pointer is positioned at the top of the instrument to indicate banking attitude of the aircraft. A device representing a
miniature aircraft is mounted in front of the horizon bar or sphere or disk. On some attitude indicators, this device can be adjusted up or down by a knob located on the instrument case. This is done to place the miniature aircraft in the desired position in relation to the horizon bar or horizon line. Other attitude indicators have a knob which is used to adjust the horizon line to place it in the desired pos~ion in relation to the miniature aircraft. The horizon bar, the sphere or disk, and the banking pointer are held rigid in space by a gyroscope. The horizon line or horizon bar is parallel to the natural horizon, and the banking pOinter is perpendicular to the natural horizon. This establishes a level reference plane inside the aircraft. The case of the instrument, which is attached to the aircraft, moves with the aircraft as it changes its attitude. In this way, the attitude of the aircraft is displayed on the attitude indicator in both pitch and bank.
2-15. Operation errors a. Electrical attitude indicators have
gyroscopes mounted to allow 360- degree movement of the instrument case in both pitch and bank. If the instrument has a caging knob, it may be used to quickly erect the gyroscope after power has been applied to it or to erect it when in-flight errors have been induced in the instrument.
b. Caging of an attitude indicator should be done only when the aircraft is in level flight. If uncaged in an unlevel flight attitude, it will remain in an unlevel attitude until the erecting mechanism places it back in its usual operating position.
c. Att~ude indicators may have small errors in operation due to precession. These may be caused by uncoordinated use of the aircraft controls in flight or by the poor mechanical condition of the instrument. The errors may also be caused by turning the aircraft or by accelerating or decelerating the aircraft in flight. Many of these errors will be so small and 01 such short duration that
they will not be noticed. The errors will usually be detected by relerence to the other flight instruments. II the instrument is in good operating condition, the erecting mechanism will complete its
correction of the error in a reasonable time after the error-inducing condition is
no longer present.
15

NOTE: The operation of the attitude indicator in each aircraft is described in
the appropriate aircraft operator's manual.
Section IV
Turn-and-Slip Indicators
2-16, Operation The turn-and-slip indicator (fig 2-9) is a
combination of two instruments-a turn needle and a ball. The turn needle depends on gyroscopic precession for its
indications, arid the ball is actuated by gravity and centrifugal forces. The gyro has a horizontal spin axis with a
restricted mounting and is only free to tilt. The tilting of the gyro is displayed as a deflection of the turn needle.
2-17. Turn needle The deflection of the turn needle away from its vertical or centered position
indicates that the aircraft is turning in the direction of the deflection. The amount of deflection from the centered position is proportional to the rate of turn in
degrees per second. The rate of turn depends on whether the instrument is a
2-minute or 4-m,inute turn needle. A 360- degree turn with a single-needle width
deflection will require 2 minutes with a 2- minute turn needle and 4 minutes with a
4-minute turn needle (fig 2-9). The rate of turn with a single-needle width deflection is 3 degrees per second with a
2-minute turn needle and 1- V2degrees per second with a 4-minute turn needle. A rate of turn of 3 degrees, per second on a 4-minute turn needle will require a
two-needlp-width deflection of the turn needle.
2-18. Ball The ball of the turn-and-slip indicator
consists of a sealed, curved glass tube containing kerosene and a black agate
or steel ball bearing which is free to
move inside the tube. The fluid provides a dampening action and ensures smooth and easy movement of the ball. The tube is curved so that the ball seeks the
lowest point at its center. A small projection of the ieft end of the tube
contains a bubbie of air which
compensates for expansion of the fluid
during changes in temperature'. Two strands of safety wire are wound around the glass tube as referencé markers to indicate the correct position of the ball in
the tube. The forces acting on the ball
are gravity and centrifugal force.
a. In straight flight. During straight flight, the force of gravity causes the ball
to rest in the lowest part of the tube
between the reference markers.
b. In a balanced turn. In a balanced
(or coordinated) turn, gravity and centrifugal forces are balanced and 1he
ball remains between the reference
markers. c. In an unbalanced turn. When the
forces acting on the ball become unbalanced or unequai, the ball moves
away from its position between the
reference markers. A skid or a skip may result from an unbaianced turn.
(1) A skid. in a skid, the rate of turn is
too great for the angle of bank. The centrifugal force is greater 1han gravity,
and the ball moves out of its centered position and toward the outside of the
turn. Correcting to a balanced flight requires an increase of the angle of
bank, a decrease in the rate of turn, or
an adjustment of both until the forces are baianced.
Figure 2-9. Turn~and.slip Indicator
16 15 DECEMBER 1964 UPDATE' FM 1-240
(2) A slip. In a slip, the rate of turn is
too slow for the angle of bank. Because gravity is greater than centrifugal force,. the ball moves from its centered position
toward the inside of the turn. Correcting to a balanced flight requires a decrease of the angle of bank, an increase in the rate of turn, or an adjustment of both until the forces are balanced.
d. As a balance indicator. The ball instrument aids in achieving correct coordination. Correct coordination in
fixed-wing aircraft is achieved by proper use of the ailerons and rudder in relation to each other. However, correct coordination is achieved in rotary-wing aircraft by proper use of the antitorque pedals and the cyclic in relation to each other. The ball instrument also aids in
correctly setting the aileron and rudder trim in fixed-wing aircraft during flight.
Section V Slaved Gyro Compass Systems
2-19. Operation The slaved gyro compass (fig 2-10), a
gyro-stabilized magnetic compass, may be operated as a magnetically siaved gyro compass over areas of the earth's surface where the earth's magnetic field is usable. Each system may aiso be operated as a free gyro heading indicator in areas where the earth's magnetic fieid is unusable.
a. Slaved gyro mode of operation. In
the slaved mode of operation, a
direction-sensing device called a flux
valve detects the anguiar position of the
earth'smagnetic field with respect to the aircraft. This information is fed to a drive unit used to align the gyro. That presents a stabilized heading indication.
b. Free gyro mode of operation. I n the
free mode of operation, the ditection-
sensing flux valve is disconnected from . lhe systEifT'. and the gyro is used only as
.Ii heading reference indicator. The heading indicator is originally set to
correspond to the aircraft heading. The aircraft heading can be obtained from a
standby magnetic compass or by
alignment with the runway. Since the gyro is not slaved to the flux valve unit,
the heading indicator is subject to drift.
The heading indications should be periodically checked with those of the standby source of reference heading and reset, if necessary.
2-20. Components Essentially, each slaved gyro compass system consists of a compass transmitter, an amplifier, a directional
gyro, a primary heading indicator, and
normally a repeater heading indicator.
a. Compass transmit/er. The compass transmitter contains the flux valve unit which is the direction-sensing device of the system. This unit detects the

SECONDARY SLAVED
GYRO COMPASS
HEADING INDICATOR (RMI) (ID-250/ARN)
.
...,.. -- --
.~ ANNUNCIATOR WINDOW
.: SYNCHRONIZER KNOB PRIMARY SLAVED
GYRO COMPASS
HEADING INDICATOR (RMI) (ID.998/ASN)
REMOTE COMPASS
TRANSMITTER
~ J
Figure 2-10. Components of a typical slaved gyro compass system
15 DECEMBER 1964 UPDATE. FM 1-240
COMPENSATOR
FLUX
VALVE
UNIT
17

horizontal components (or lines of flux)
of the earth's magnetic field and is
suspended by a universal joint. The unit
is weighted so that it normally maintains a horizontal plane. The universal suspension allows the flux valve to hang
like a plumb bob and swing in a
pendulous manner. The flux valve unit
cannot rotate and is fixed to turn with the
aircraft. Any change in direction by the
aircraft results in a corresponding
change of the flux valve unit in relation
to the earth's magnetic field. This field of
force induces an electrical voitage in the
flux valve unit which is transmitted through the amplifier to the directional
gyro control. Since the heading
information is transmitted electrically to
the gyro, the unit can be installed at a
remote part of the aircraft (for example, the wingtip) where magnetic deviation is
at a minimum. A mechanical
compensator further reduces the deviation effect.
b. Amplifier. The amplifier is the coordinating and distributing center of
. the slaved gyro compass system. Its
principal function is to increase the
strength of the signals from the compass
transmitter. Normally, the amplifier also
serves as the power suppiy and junction
box of the compass system.
c. Directional gyro. The directional
gyro maintains a constant directional
reference by using the gyroscopic
property of rigidity in space. The case of
the directional gyro controi unit rotates in
azimuth auout the directionally stabilized
gyro as the aircraft turns. As the aircraft
rotates about the gyro, the turn information is relayed to the primary heading and repeater indicators. The directional gyro maintains its reference to
magnetic north by signals received from the remote compass transmitter. These signals operate a torque motor in the
directional gyro control. The torque motor precesses the gyro unit until it is
aligned with the transmitter signal, thus slaving the gyro with the earth's magnetic meridian. The gyro is free to
operate within 85 degrees from the level
flight attitude, both in pitch and bank. When these limits are exceeded, the
gyro strikes mechanical stops. This
causes erroneous indications to appear on the heading indicators until the
directional gyro is again slaved through the compass transmitter to the magnetic
meridian. Induced errors may be as large
as 5 degrees; however, the gyro will fully
erect in less than 5 minutes.
d. Heading indicators. The heading
indicators (figs 2-11 and 2-12) in gyro
compass systems may be either primary
-or: repeater. -
18
supplies both impact and static
pressures through connecting lines to
the instruments. The indications on the calibrated scales of these instruments result from differences in air pressures that exist within each of the instruments.
To interpret the indications of these Instruments properly, it is essential to
understand the construction, operation, and use of the entire Pitot-static system.
Figure 2-11. Heading Indicator
HEADING MARKER ..
,T - 'I \ \ '\' ~ I '/
'....<'\~ N d' ,//' '::'~~ ~// , () ~ cr-- :'^'J
f. :=
=-~ fT1-=
~-~ " ,~ '. cy '1>-:
'. /2 '-:,\,,-,.?: / '/ Ò> \<# .
"I I, l f, \ \ \' ó':1 1-ÆAI:Jt.4G
"
COlJItSf
Figure 2-12. Course indicator (1) Primary. Some primary heading
indicators have an annunciator window and a gyro synchronizing control knob. The annunciator window shows the direction in which the synchronizing knob
should be rotated. If the gyro controis
are not on the primary heading indicator, they are on the gyro control panel.
(2) Repeater. The repeater dial may look exactly like the primary dial, but it
merely repeats the indications on the
primary indicator. The repeater indicator
does not have a synchronizing knob.
NOTE: The operation of the slaved gyro
compass system in each aircraft is
described in the appropriate aircraft operator's manual.
Section VI The Pitot-Static System
2-21. Operation The Pitot-static system (fig 2-13) is the
source of power for the operation of the
differential pressure instruments-the altimeter, vertical speed indicator,
instantaneous vertical speed indicator (IVSI), and the airspeed indicator. The differential pressure used to power these
instruments is created either by impact
and static or by static and trapped air
pressures. The. f"ito\:static ßYstem.
15 DECEMBER 1984 UPDATE. FM 1-240

ALT VIS
SOUFICE OF STATIC PRESSURE
2-22. Impact pressure
a. Impact pressure is required for the operation of the airspeed indicator. The open Pitot tube is mounted on the aircraft, parallel to the longitudinal axis of the aircraft, where there is a minimum disturbance of air caused by aircraft motion. Two major parts make up the Pitot tube-the impact pressure chamber with lines and the heating unit. The Pitot tube receives the impact pressure of the air which increases with the aircraft speed. Since the diaphragm of the airspeed indicator is connected directly
to the Pitot line, it is expanded by this
increase in impact pressure. The expansion or contraction of the diaphragm, in turn, controls the position of the airsoeed needle by a series of levers and gears. During preflight inspection, any cover that is over the impact opening of the Pitottube should be removed.
b. Pitot tubes contain a heating alement to prevent and remove ice formations which can obstruct the pressure chamber and cause erroneous instrument indications. (The appropriate aircraft operator's manual contains proper Pitot heater preflight procedures.)
2-23. Static pressure To obtain the required difference in
pressure for the operation of the differential pressure instruments, static air pressure from the atmosphere is supplied to the instruments through static vents or ports. To minimize sensing errors, the static vents are located in an area that has the least disturbed airflow. Some airc~ft have these vents located on the Pitot tube. However, the majority
of subsonic aircraft have them located on both sides of the fuselage. These vents are connected to a common line by a V-fitting. 'By placing and connecting .the vents in this manner, errors in static.
-
STATIC LINE HEATING LINE
DRAIN OPENING
Figure 2-13. Flush-type Pitot-statlc system
pressure due to erratic changes in the attitude of the aircraft during flight are minimal. During preflight inspection, vents should be checked to be sure that they are unobstructed. Also, a check should be made to see that nothing has damaged or changed the size of one or more of these vents. Distorting the holes or the surrounding skin area a few thousandths of an inch can cause pressure-sensing errors.
a. Alternate source of static pressure. Some aircraft have an alternate source of static pressure in case the normal system becomes obstructed by ice or otherwise fails. The alternate static vent (or vents) is usually located at a pOint in
the airframe that is not susceptible to icing conditions. When this alternate source is located within the cockpit or cabin, there is usually a diflerence between the static pressure it supplies and that supplied by the normal system. Also, opening storm windows and air vents or operating the heating and ventilating system may introduce a
further change in the pressure supplied by the altemate source. When the normal system is switched to the alternate source, airspeed and altitude will usually change and the vertical speed indicator will momentarily indicate a climb or descent. The amount and direction of the instrument errors are normally available from charts in the aircraft operatòr's manual. Corrections indicated by these charts should be applied to the airspeed indicator and altimeter during flight.
NOTE: Refer to the appropriate aircraft operator's manual, because selection of alternate static air in some pressurized aircraft may cause depressurization.
b. Emergency alternate source of static pressure. If the normal static system is inoperative and the aircraft has no alternate source, static pressure may be obtained by breaking the glass on any one of the differential pressure instruments. It is difficuit to break the
. -giass..wilhouLdamaging the instrument.
15 DECEMBER 1964 UPDATE. FM 1-240
PITOT LINE
(SCHEMATIC DIAGRAM OF PITOT HEAD)
PITOT-PRESSURE CHAMBER
\ PITOT-HEAT ELEMENT
For this reason, it is advisable to break the glass on the vertical speed indicator since this is the least important of the differential pressure instruments. If the glass of the vertical speed indicator is
broken and the instrument is still operating, its indications will be the reverse of normal indications. The altimeter and airspeed indicators will lag in their indications, because the static pressure now comes from inside the cockpit and forces its way to the instruments through the calibrated leak in
the vertical speed indicator.
Section VII Altimeters
2-24. Pressure altimeter The atmosphere surrounding the earth exerts downward pressure because of its
weight. The air near the earth is weighted down and compressed by the air above and thus has greater density than the air above. This difference in
pressure at various levels is used by the altimeter. The pressure altimeter (fig 2-14) is essentially a pressure-measuring device calibrated to convert atmospheric pressure to an altitude indication. The conversion is bssed on a fixed set of values known as the US Standard of Atmosphere. A portion of these values is tabulated in table 2-1 .
Although these atmospheric vaiues exist only on paper, they were constructed by a formula which approximates the average pressure and temperature of 45 degrees north latitude in the United States. Up to an altitude of about 15,000 feet, pressure decreases approximately 1 inch of mercury per 1,000 feet. A pressure- setting knob compensates for nonstandard conditions of surface pressure that exist from hour to hour.
19

Figure 2-14. The pressure altimeter
Table 2-1 Standard pressure and temperatures at 1,000- foot Intervals
Feel Pressure (inches Hg)
Degrees
lempera1Ure (0)
16,000 15,000 14,000 13,000 12,000 11,000 10,000
9,000 8,000 7,000 6,000 5,000 4,000 3,000 2,000 1,000
Sea Level
16.21 16,88
,
17.57 18.29 19.03 19.79 20.38 21.38 22.22 23.09 23.9B 24.9B 25.84 26.81 27.82 28.66 29.92
-17 -15 -13 -11 -9 -7 -5 -3 -1
1 3 5 7
9 11
13 15
2-25. Construction The basic component of the pressure altimeter is a series of aneroid wafers (fig
2-15). The aneroid wafers are airtight
cells from which nearly all of the air has
been evacuated. This series of interconnected wafers contracts or expands with changes of atmospheric
pressure. As the aircraft altitude
increases, the static pressure surrounding the wafers decreases and
allows the wafers to expand. When the aircraft altitude decreases, the static
pressure surrounding the wafers increases, causing the wafers to contract. One end of the stack of wafers is attached to the instrument case and the other is linked by a lever to a shaft A linkage and gear assembly Is also
connected to the shaft. Expansion or contraction of the wafers causes the shaft to rotate. This rotation through the gearing mechanism positions the hands
on the altimeter dial to indicate the
altitude.
2-26. Altimeter Indications The altimeter dial (fig 2-14) is properly
read by noting the position öf all three
hands in the DrderoUhe shortesUo the
20
longest. The shortest hand indicates tens of thousands; the intermediate hand
thousands, and the longest hand
hundreds. Figure 2-14 illustrates 750 feet.
a. The old type altimeter dial (fig 2-14) has been modified because of difficulty
in rapidly determining thousands and tens of thousands of feet. The MB-2 (fig
2-16) was developed both as a new altimeter and as a conversion of older
modeis. It has a crosshatched "flag" on the lower part of the diai and, instead of a 10,000-foot needle, it has a disk with a
pointer extending out to the edge of the dial. A hole in the disk is located so that the edge of the flag barely shows at
15,000 feet. At altitudes below 10,000
feet, the entire flag shows.
Figure 2-16. The MB-2 altimeter dial
b. A barometric scaie is visible through
an opening (Kalis man window) in the right-hand side of the altimeter dial. This
scale is calibrated from 28.10 to 31.00 inches of mercury and is rotated by the pressure-setting knob. In the type of
altimeter illustrated in figure 2-14, the rotation ot the pressure-setting knob also
moves the reference marks. These reference marks provide alternate means (in hundreds of feet and thousands of feet) of adjusting the altimeter if sea level pressure is outside the range of the barometric scale. Rotating the setting knob provides altimeter adjustment to
nonstandard conditions of pressure other than those in table 2-1. An example would be an altimeter placed on the beach and set at 29.92 inches of
mercury. If the hands indicate an altitude
of 200 feet, the barometric pressure at that point on the beach is lower than standard. A barometric pressure of 29.72 inches will cause a 200-foot-high indication if 29.92 inches of mercury is
set into the Kollsman window; if 29.72 inches of mercury is rotated into the. Kollsman window, the hands of the altimeter will return to zero. (One inch of
mercury equals 1,000 feet; 0.20 inch of
mercury equals 200 feet.) In effect, the
hands have been assigned a different
pressure for their zero indication. Rotating the setting knob on the
altimeter merely displaces the hands a
given amount with respect to the aneroid
wafers. '
""'t~S', . -~-::""'-""~-
":""'~.~, '" .._,,~~,:~.~ ",,',' ~', ,(~, ~: ""''"', ..,~!,~J5' f~;.,,' '\ .
""
-', ~J~~-Iwr' Iij:\:' I., -,'
:~t" '~ ";Iâ,)~ #(" ~'~J~ . '~:;,' ;, J ',':, ., 1 ~.~ ".')' I'~
-"""
... . II
. r ~
"'..." . ~
";':!I'
c., - (:~ ,
.
'" ,c
'-~,.~~4It..-~:",;(, ".)'(/. .~,.. - "-
. L1'~'''"J;,. "
", '/, 'ii'" ,V ,"-- '.' ,; r
1 \, ..,~(
'pr-' :',' ;' L "" ;,' .
.
,'. ~
lJ v~\~, ,.// " ..
\ 'I" ,~!!/y ;,.(..:~
...: '
>----~-~._..
Figure 2-15. Cutaway view of the altimeter
15 DECEMBER 1984 UPDATE. FM 1-240

c. Another type of pressure altimeter is the counter-drum-pointer altimeter. One model of this altimeter is the AIMS
altimeter, the AAU-32/ A (fig 2-17). In
the term AIMS, the A stands for Air
Traltic Control Radar Beacon System (ATCRBS), the 1. stands for identification
friend or foe (IFF), the M represents the Mark XII identification system, and S
means system. This altimeter is used in
aircraft whose systems have a negligible
installation error. It is a self-contained unit which consists of a precision aneroid altimeter combined with an encoder. The altitude is displayed by the counter-drum- pointer dial. The encoder generates a
signal which transmits the altitude to the air traltic control (ATC) equipment
.
through the aircraft transponder. The following techniques may be used to
read the altimeter: (1) Read the counter-drum window,
without referring to the 100-foot pointer,
as a direct digital readout of both
thousands and hundreds of feet. (2) Read the two counter indications,
without referring to the drum, and then add the 100-foot pointer indication. The 100-foot pointer serves as a precise readout of values less than 100 feet required for determining lead points of
level-off altitudes, maintaining level flight,
and performing instrument approaches. If
the "CODE OFF" flag, located on the upper left of the altimeter face is visible, it means that the AC power is not
available, the circuit breakers are not in,
or there is an internal altimeter encoder failure. This indicates that the encoder is
not operating and that no altitude informatioo is being furnished through
the transponder to the ATC equipment.
However, this does not affect the ability of the instrument fo indicate the correct altitude.
2-27. Effect of nonstandard temperafures and pressures Atmospheric temperature and pressure
vary continuously. Rarely is the pressure at sea level exactly 29.92 inches of
mercury or the temperature + 15 degrees Celsius. Furthermore, temperature and pressure may not decrease with a standard increase of
altitude. Even if the altimeter is properly
set for surface conditions, it will often be
incorrect at higher levels. On a warm day, the air expands and weighs less per unit volume than on a colder day;
consequently, the pressure levels are raised. On a cold day, the reverse would be true.
a. Altimeter error due to nonstandard temperature. If the air is warmer fhan the standard temperature for the flight
altitude, the aircraft will be higher above sea level than the altimeter indicates. If
the air is colder than the standard
temperature for the flight altitude, the aircraft will be lower than the altimeter indicates (fig 2-18). The altimeter provides no adjustment for nonstandard temperatures. However, since instrument flight in controlled airspace is
accomplished at assigned altitudes, aircraft separation is maintained. This is
because all aircraft using the same altimeter setting and flying in the same general area are equally affected by any nonstandard temperature. In selecting
altitudes for flight over mountainous
INDICATED-ALTITUDE IS 725 FEET
4
5
1. 10,OQO-Foot Counter
2. 1 ,OOO-Foot Counter
3. 100'Foot Pointor
4. 10D-Foot Drum
5. Koll,man Window
Figure 2-17. Counter-drum-polnter altimeter
- ----. .------ 15 DECEMBER 1984 UPDATE. FM 1-240
terrain where no minimum obstruction clearance information is available, nonstandard temperatures aloft must be
considered.
<

~_Al TIMETER READS
---- --~~\ - _l~W- - "
IAU~~~::C:l~ADS .
IN~~~;;~' ._~:~TlTUD'-1Al TIME:I~H READS
29 "'- 96 'Iv
-
-~-- W
Ii""'---<; Cl 9
---- ~ -
-- --- .
l- I- ~
oCt WARM AIR w
~
'" I-
30.23 IN Hg
SAME SEA LEVEl PRESSURE
.... Q
COLD AIR È I- ~
oCt
w
:J '" I-
Figure 2-18. Altimeter errors due to nonstandard temperatures
b. Altimeter error due to nonstandard atmospheric pressure. Figure 2-19 shows the error in altimeter readin9 that would result if the altimeter is not adjusted for variations from standard atomspheric pressure. The figure shows a pattern of isobars in a cross section of the atmosphere from Pensacola, Florida,
to New Orleans, Louisiana. The pressure at Pensacola is 30.00 inches of mercury and the pressure at New Orleans is
i 29.60 inches of mercury-a difference of , 0.40 inch of mercury. On a flight from
Pensacola to New Orleans at an altitude of 700 feet, a decrease in mean sea level (MSL) pressure of 0.40 inch of
mercury from Pensacola to New Orleans could cause the aircraft to gradually lose altitude. Although the altimeter would continue to indicate 700 feet, the aircraft could actually be flying approximately 300 feet over New Orleans.
2-28. Altimeter settings a. Currenl altimeter setting. The
current altimeter setting is normally given during radio communications with
Federal Aviation Administration (FAA) flight service stations (FSS), airport
control towers, and other ATC personnel. However, the altimeter setting may be requested at any time. The first altimeter setting is received prior to flight which allows opportunity to check the accuracy of the altimeter while aircraft is still on the ground. The altimeter accuracy check will be. made as fonows:
.
22
(1) The altimeter is set to the known field elevation. This elevation should be the one nearest the aircraft; examples include airport elevation posted on an airport building, elevation printed in flight information publications (FLIPs), or altimeter checkpoints on certain US Air
Force bases. The instrument panel is lightly tapped near the altimeter to overcome any friction error within the instrument and to allow the altimeter needles to assume their .corrected positions. This is not necessary when using a counter-drum-pointer altimeter,
because it has an interl)al vibrator. (2) The altimeter setting is read on the
barometric scale. The assumed reading is 29.90 inches of mercury on the Kollsman window. The current altimeter setting is obtained from the proper source. If the altimeter setting is 29.96 inches of mercury, the difference between the field elevation setting of
29.90 inches of mercury and the current altimeter setting of 29.96 inches of
mercury is 0.06 inch of mercury or 60 feet. If the difference between the two settings does not exceed 0.07 inch of
mercury or 70 feet, (0.01 inch of mercury on barometric scale equals 10 feet) the altimeter is considered reliable for instrument flight. During flight, the current altimeter settings should be placed on the barometric scale as they are received.
(3) For rotary-wing aircraft, it is best to make the check prior to starting the
15 DECEMBER 1984 UPDATE. FM 1-240
engine(s). This!s done to eliminate the effect of any pressure changes caused by the turning rotor blades. For fixed- wing aircraft, the check may be made either before or after starting engines.
NOTE: For instrument approaches, the altimeter setting provided by ATC is
checked with the forecast altimeter setting. If there is a large difference, verification is requested from ATC.
b. Altimeter setting system. The altimeter setting provided by navigation radio stations, control towers, and other air traffic control agencies is a correction only for nonstandard surface pressure. Atmospheric pressure is measured at each station and the value obtained is
corrected to sea level according to the station's surveyed elevation. Thus, the altimeter setting is a computed sea ievel pressure and should be considered valid only in close proximity to the station and near the surface. Nonstandard lapse rate errors may exist at all altitudes. However, at low altitudes the error is usually small.

ALTIMETER READS
700FE~ Û
300 FEET
NEW ORLEANS 29.60 in.Hg.
Figure 2-19. Altimeter error due to nonstandard atmospheric pressure
(1) The obstruction clearance limits published for airways and instrument approaches will normally provide the necessary ",argin of safety for aircraft operating under instrument flight rules (IFR). Altitude separation between aircraft is maintained as long as the current altimeter setting is used. For example, in figure 2-20, aircraft A is assigned an altitude of 5,000 feet eastbound and, with the current altimeter setting applied, indicated altitude is 5,000 feet. However, due to nonstandard conditions aloft, actual aititude is only 4,700 feet. Aircraft B is assigned an altitude of 6,000 feet westbound and, with the current altimeter setting applied, the indicated altitude is 6,000 feet. The same nonstandard conditions affect aircraft B and the actual altitude is 5,700 feet. Even though both aircraft are 300 feet below indicated altitude, they will still maintain a 1,000-foot vertical clearance as they approach and pass each other.
(2) At higher altitudes, pressure and temperature deviation from standard conditions could combine to cause altimeter errors that would place the aircraft below a sefe terrain clearance altitude. A high altimeter setting, combined with a pressure level aloft which is lower than standard, is particularly dangerous in mountainous terrain. For this reason, the weather forecaster is. always consulted to analyze
pressure patterns at high altitudes. For a
complete discussion of this type altimeter error, see FM 1-230.
2-29. Types of altitude The following types of aititude are most often used:
a. Indicated altitude. Indicated altitude is altitude as read on the dial with a
current altimeter setting (sea level pressure) set in the Kollsman window.
15 DECEMBER 1984 UPDATE oFM 1-240
~--....
700 FEET
I I
ÆNSACOLA 30.00 in.Hg.
2:

AIRCRAFT B-INDICATED ALTITUDE 6,000 FT ALTITUDE
...,J ~ I I z I 0 I I t: i= I I Ii< <(
~I I ~.~ <(I I~ ~fu 01 1<(- (J)
,
~I ,a:: .... ~...,w (J)I I~ z
I ,<( 0 ..J
Z', I I
~
6,000 FT
AIRCRAFT A-INDICATED ALTITUDE 5,000 FT
4,000 FT
3,000 FT
2,000 FT
1,000 FT'
MEAN SEA LEVEL
Figure 2-20. Altitude separation maintained by using current altimeter setting
15 DECEMBER 1984 UPDATE. FM 1-240 24

b. Pressure altitude. Pressure altitude (fig 2-21) is the height measured above the 29.92-inch-of-mercury pressure level (standard datum plane). If the Kollsman window is set to 29.92 inches of mercury, the hands of the dial indicate pressure altitude. This setting is called the standard altimeter setting. In fhe United States, the use of pressure altitudes (standard altimeter setting) begins at 18,000 feet. These altitudes are referred to as flight levels (FL); for example, 18,000 feet = FL 180 and 35,000 feet = FL 350.
c. Absolute altitude. Absolute altitude (fig 2-21) is the altitude above the surface or terrain where the aircraft is flying. .
d. True altitude. True altitude (fig 2-21) is the altitude above MSL.
e. Density altitude. Density altitude is the altitude for which a given air density exists in the standard atmosphere. If the barometric pressure is lower or the temperature is higher than standard, then density altitude of the field is higher than its actual elevation. For example, for Denver, Colorado, with an elevation of 5,500 feet, a temperature of 110 degrees Fahrenheit, and barometer reading (corrected to MSL) of 29.55 inches of mercury, density altitude is about 10,000 feet. Since higher density altitude requires a greater takeoff distance and reduces aircraft performance, failure to calculate density altitude in some situations could be fatal. Density altitudes can be obtained from many airfi~id towers or may be computed on the dead reckoning computer. .
2-30. Radar altimeter
a. The radar altimeter, also known as radio altimeter, continuously indicates aircraft height above the ground. The system is a "down-looking" device which accurately measures the distance between the aircraft and the highest object on the terrain. The time interval between a transmitted and received radio signal is automatically converted into an absolute altitude reading. The radar altimeter shown in figure 2-22 has a dial type reading, but another type utiiizes a digital presentation. A warning light and aural tone are included in some models which alerts the aviator when aircraft reaches a preselected altitude.
b. All radar altimeters operate on a
radio frequency of 4,300 megahertz. A radar altimeter has three main functions.
(1) It serves as a ground proximity warning device.
(2) It is an accurate cross-check for the barometric altimeter.
(3) It indicates absolute height above the terrain. .
~ TRUE PRESSURE ALTITUDE ALTITUDE
-------- ABSOLUTE ALTITUDE
TERRAIN
"
SEA LEVEL
Figure 2-21. Types of altitude
HI ALTITUDE BUG
NO-TRACK MASK
OFF FLAG
HI SET BUG
Figure 2-22. Radar altimeter
15 DECEMBER 1984 UPDATE oFM 1-240
LO ALTITUDE BUG
LO WARNING LAMP
LO SET BUG
25

Section VIII The Airspeed Indicator
2-31. Construction The airspeed indicator has a cylindrical airtight case connected to the static line.
inside the case is a small diaphragm
made of phosphor bronze or beryliium
copper. The diaphragm, which is very sensitive to pressure changes, is
connected firmly at one side to the
impact pressure line. The needle is
connected through a series of levers and
gears to the free side of the diaphragm
(fig 2-23).
2-32. Operation The airspeed indicator is a differential
pressure instrument that measures pressure difference between the impact
pressure and static pressure lines. The
two pressures are equal when the aircraft is stationary on the ground, but
air movement causes the pressure in the
impact line to become greater than the
pressure in the static line. The diaphragm, being connected directly to
i the impact pressu re line, will expand due ,
to increased impact pressure. The dial is
scaled so that the needle will indicate I
this pressure differential in knots.
I 2-33. Airspeeds : There are three kinds of ! airspeeds-indicated, calibrated, and
true.
a. Indicated airspeed. indicated . airspeed is the airspeed read directly I from the indicator. !
b. Calibra ted airspeed. Calibrated airspeed is indicated airspeed corrected for instrument installation error. This.
. error is caused by the difference In the : static pressure at the Pitot head and the
static pressure at the static vents. The
error is usually small and. may be computed by reference to the
, appropriate aircraft operator's manual.
! c. True airspeed. True airspeed is .
calibrated airspeed corrected for error due to air density (aititude and temperature). This may be computed on the dead reckoning computer:
S6ction IX The Vertical Speed Indicator
2-34. Construction The vertical speed indicator (fig 2-24) has a sealed case connected to the
static pressure line through a calibrated
leak. Inside the case is a diaphragm
similar to that in the airspeed indicator.
This diaphragm is connected directly to the static pressure line. A system of
levers and gears connects the
diaphragm to the indicating needle on the face of the instrument. The vertical
speed indicator contains a mechanism which enables it to compensate automatically for changes in air
temperature. .
.. .. -
--. 26
2-35. Operation Although the vertical speed indicator
operates entirely from static pressure, it
is a differential pressure instrument. The
differential pressure is establisned
between the instantaneous static
pressure in the diaphragm and the
trapped static pressure within the case. When the aircraft starts a climb, the
pressure in the diaphragm decrease" in
ratio to the reduction in atmospheric
pressure. The calibrated leak retards the
pressure change to the instrument case. This ca'.'ses the diaphragm to contract,
causing the needle to indicate an ascent. The leak in the case is calibrated to
maintain a definite ratio between
pressure in the diaphragm and pressure in the case if a constant rate of climb is
maintained. When the aircraft leveis off, the calibrated ieak requires 6 to 9
seconds to equalize the two pressures
and allows the needle to return to zero. This causes a lag of 6 to 9 seconds in
the instrument. When the aircraft is
descending, the pressure inside the
diaphragm is increasing and the calibrated leak again maintains a
constant relation between the two pressures.
2-36. Instrument lag The vertical speed indicator gives the rate of climb or descent or indicates level flight. These indications are not reliable in extremely rough air or when the attitude of the aircraft is constantly changing. This is partially due to the lag in the instrument. The instrument can be used to indicate pitch attitude if a
thorough understanding of its lag is
considered in Interpreting the indications.
PRINCIPAL PARTS
(1) Diaphragm
(2) Rockònq Shaft
(3) Pinion
(4) Sector
(5) Topered Stoff (6) Pointer
r>'" _~5" '. I
2 43 ,
Figure 2-23. Cutaway view of the airspeed Indicator with component parts "
A.INDICATOR FACE B. INTERNAL VIEW
Figure 2-24. The vertical speed Indicator
15 DECEMBER 1984 UPDATE. FM 1-240

2-37. Adjustment The needle of the vertical speed indicator should indicate zero while the aircraft is on the ground or maintaining a
constant altitude. Any reading other than zero indicates the instrument needs to be adjusted. This can be done by using a
small screwdriver to turn the screw in the lower ieft corner of the indicator.
2-38. Instantaneous vertical speed indicator
The instantaneous vertical speed indicator can be identified by the letters "IVSI" that appear on the dial.
Compared to the conventional vertical speed indicator, this instrument has no apparent lag. The IVSI is similar in construction to the conventional vertical speed indicator. It differs from this
indicator by the addition of two accelerometers which generate pressure differences when there is a change in
the normal acceleration of the aircraft. . The pressure differences are transmitted
to the sensitive diaphragm by pneumatic circuits. Velocity is added, as necessary. to the pressure-leak velocity to obtain the almost instantaneous vertical speed indication. As the pressure-leak component approaches the actual speed, the integrated component fades out. The sum of the pressure-leak and acceierometer velocities is the total vertical airspeed. provided the normal axis of the aircraft is within about 30 degrees 01 the vertical.
a. Since the accelerometers are not vertically stabilized, some error is
generated in turns. If a zero indication is maintained on the IVSI when the aircraft is entering a turn. some loss in altitude will be encountered. A corresponding gain in altitude will result when the aircraft is recovering from a turn. The IVSI should not be used for directly controlling vertical speed when the aircraft is rapidly banking in excess of 40 degrees. However, the indicator is not affected once the aircraft is in a steady
turn.
b. The fade-out of acceleration in a
steady turn happens when a turn has been started and the accompanying change in normal acceleration has been completed. Fade-out occurs because the accelerator masses will settle to new bal- ance points corresponding to the normal acceleration maintained in the turn. When a 3D-degree bank is being established, al- titude deviation should not exceed 90 feet while the IVSI is maintained at zero. In
more steeply banked turns. the turn error
-- IJipidlyinçreases wjthbank angle. -
Chapter 3
Power, Pitch Attitude, and Bank Control Through Instruments
3-1. General In instrument flight, instruments must be properiy cross-checked and correctly interpreted to detect any malfunction and to control the aircraft in the desired flight path. During instrument flight. the instruments provide (1) a reference of the attitude 01 the aircraft, (2) a
reference lor the use of power, and (3) an indication 01 whether the combination of attitude and power is producing the desired performance. Control and trim techniques used during instrument flight are identical to those used during visual flight.
Section I
Fundamental Skills
3-2. Attitude control In instrument flying, attitude requirements are determined by interpreting the instruments in the aircraft. The attitude 01 an aircraft is controlled by movement around its lateral (pitch), longitudinal (roll), and vertical (yaw) axes (figs 3-1 and 3-2).
3-3. Instrument cross-check Ob~erving and interpreting two or more instruments to determine attitude and performance 01 an aircraft is called cross-checking.
a. Although no specific method of cross-checking is recommended, those instruments which give the best information for controlling the aircraft in any given maneuver should be used. The important instruments are the ones that give the most pertinent inlormation for' any particular phase 01 the manewer. These are usually the instruments that should be held at a constant indication. The remaining instruments should help maintain the important instruments at the desired indications which is also true in using the emergency panel.
b. Cross-checking is mandatory in instrument flying. In visual flight. a level attitude can be maintained by outside relerences. However, even then the altimeter must be checked to determine if altitude is being maintained.
3-4. Trim Proper trim technique is essential lor smooth and accurate instrument flying. The aircraft should be properly trimmed while executing a maneuver. The degree of flying skill which will uitimately develop depends largeiy upon how well the aviator learns to keep the aircraft trimmed.
a. Fixed wing. A lixed-wing aircraft is correctly trimmed when it is maintaining a desired attitude with all control pressures neutralized. By relieving all
--control pressures,-iHs much easier-to 15 DECEMBER 1964 UPDATE. FM 1-240
maintain the aircraft in a certain attitude. This will allow more time to devote to the navigation instruments and additional cockpit duties. An aircraft is placed in trim by applying control pressure(s) to establish a desired attitude. Then the trim is adjusted so that the aircraft will maintain that attitude when flight controls are released. The aircraft is trimmed for coordinated flight by centering the ball of the turn-and-slip indicator. The rudder trim is moved in the direction where the ball is displaced from center. Aileron trim may then be adjusted to maintain a wings-level attitude. Differential power control on multiengîne aircraft is an additional factor affecting coordinated llight. When possible, balanced power or thrust is used to aid in maintaining coordinated flight. Changes in attitude, power, or configuration may require trim adjustments. Use of trim alone to establish a change in aircraft attitude usually results in erratic aircraft control. Smooth and precise attitude changes are best attained by a combination of control pressures and subsequent trim adjustments. The trim controis are aids to smooth aircraft control.
b. Rotary wing. Maintaining trim in
rotary-wing aircraft is accomplished by continually cross-checking the instruments and using the cyclic centering button. II the helicopter is so equipped this relieves all possible cyclic pressures. Trim also refers to use of the pedal adjustment to center the ball of the turn indicator. Pedal trim is required during all power changes. (See paras 3-17b and 3-23d for trim procedures.)
Section II Power Control
:Hi. Lift Power produces thrust and gives motion to the wings and rotor(s), thus creating lift. Sufficient power. combined with the appropriate attitude of the wing, overcomes the forces of gravity, drag, and inertia and results in the desired aircraft performance.
3-6. Power instruments Army aircraft is powered by a variety of power plants. Each power planf has certain instruments that indicate the amount 01 power being applied to operate the aircraft During instrument flight, these instruments must be used to make the required power adjustments.
27

lONGITUDINAL AXIS
\ VERTICAL
AXIS
!
Figure 3~ 1. Axes of movement
PITCH CONTROL
t
POWER CONTROL
,
Figure 3-2. Power, yaw, pitch, and bank controls
----.------.--
28 15 DECEMBER 1984 UPDATE. FM 1-240

3-7. Constant airspeed If airspeed is maintained constant by p~ch attitude adjusiments. there will be a
resulting p~ch attitude where a certain power setting will result in level flight (fig 3-3, A). Then, if power is increased, while pitch attitude is held constant, a
constant airspeed and a climb will result (fig 3-3, B). If the power setting is
decreased. while pitch attitude is held
constant, airspeed will remain constant and a descent will result (fig 3-3, C).
3-8. Constant altitude A constant altitude is maintained by minor pitch attitude adjustments and desired airspeed is maintained by necessary power adjustments. After the altitude is stabilized and desired airspeed is established, any deviation from that altitude will result in airspeed change if
the altitude is changing. Once altitude is
stabilized again, the airspeed will return to its previous indication if the power is
maintained at the previous setting. The airspeed may be high due to loss of altitude. If so, the excess airspeed may be used by an upward pitch adjustment to return the aircraft to the desired altitude and airspeed. Conversely, the
same is true with a gain in altitude and an accompanying loss of airspeed. The excess altitude may be used by a
downward pitch attitude adjustment to return the aircraft to the desired altitude and airspeed. With desired airspeed but undesirable altitude, pitch adjustments
may be used to make small corrections in altitude while the airspeed is allowed to temporarily change. In figure 3-4, the aircraft at A-1 will return to 4,000 feet altitude and 140 knots airspeed by the action taken in B. Aircraft A-2 will return to 4,000 feet altitude and 140 knots airspeed by the action taken in C. In both examples, note there was a temporary airspeed change untii the aircraft returned to the desired altitude. Whenever a combination of high altitude and airspeed or low altitude and airspeed exists, a power adjustment is required. This makes the altitude adjustment
easier and keeps desired airspeed.
, ,
, ,
,
:/ ," "
, ,
, ,
-........,,,,,
-' -- --- -- ---------- .....
----------- ~
A --- ---- "
---.. -',
. . . .. --------------" .
,
"X
..... "'\ Figure 3-3. Effects of power changes while constant airspeed Is maintained
15 DECEMBER 1984 UPDATE. FM 1-240 2f

II II
30
I I
I I I I I I I I I
- -
II - -
II u
I I i
1\ I \
/ \ / \
/ \ / \
/
- -
II . ..
\ \
\ \ , I I I I I I I
C'I I
<(
Figure 3-4. Airspeed converted to altitude and vice versa
15 DECEMBER 1984 UPDATE. FM 1-240
.8- ~:: -
-
.
.

H. Power variation When power is changed to adjust airspeed, it may cause changes in the attitude of the aircraft around some or all the axes. The amount and direction of movement will depend on how much or how rapidly the power is changed, whether slngJe-engined or multiengined, fixed or rotary wing. As airspeed changes, the pitch attitude must be adjusted to maintain desired attitude for the maneuver being executed. The bank must be adjusted to maintain the desired heading or maintain a desired rate of turn. And the rudder must be used to maintain coordinated flight. Trim must be adjusted as control pressures indicate a change is needed. The effect on pitch attitude and airspeed caused by power changes during level flight is iliustrated in figure 3-5.
3-10. Power setting Sometimes large airspeed changes are desired such as reducing from cruise flight to traffic pattern airspeed. The change can be made quicker if the power is reduped to a lower setting than recommended in maintaining the pattern airspeed. Conversely, for making a
change from a.lower to higher speed, the power may be advanced to a higher .
setting than recommended for the higher speed. In both cases, as the airspeed approaches the desired speed, the power is maintained by adjusting to the recommended setting.
3-11. Power Instruments cross-check During or immediately after adjusting power control(s), the power instruments should be cro~hecked to see if the power adjustm..nt is as desired. Whether or not the needlor a power adjustment. is indicated by another instrument(s), adjustment is made by cross-checking th.. pow..r instruments.
II 0 ~-~
"-..J:
A POWER INCREASE
----
.
~--- ---;--- 81111
a flOWER QECRf"SE
Figure 3-5. Constant altitude and power variable maintained
15 DECEMBER 1984 UPDATE. FM 1-240 31

Section 1\1
Pitch Attitude Control
-------'~---------'
-------- ,~~--~-::::~
-- -- ---
3-12. Attitude Instruments The pitch attitude control of an aircraft is
the angular relationship between the longitudinal axis of the aircraft and the
actual horizon (fig 3-6). The pitch
attitude control instruments are the
altimeter, attitude indicator, vertical speed indicator, and airspeed indicator
(fig 3-7). The attitude Indicator dispiays a
direct indication of the aircraft's pitch
attitude. The other pitch attitude control
instruments indirectly indicate the pitch
attitude of the aircraft.
--------~--------_. -- -- -- --------~~=~------ -- .--
Figure 3-6. Pitch attitude
ALTIMETER
VERTICAL SPEED INDICATOR
ATTITUDE INDICATOR
AIRSPEED INDICATOR
Figure 3-7. Pitch attitude Indicating instruments
32 15 DECEMBER 1964 UPDATE. FM 1-240

3-13. Attitude Indicator The attitude indicator gives a direct and immediate indication of the pitch attitude of the aircraft. The aircraft controls are used to position the miniature aircraft In relation to the horizon bar or horizon line for any pitch attitude required (fig 3-8).
a. The miniature aircraft should be placed in the proper position In relation to the horizon bar or horizon line before takeoff. The aircraft operator's manual expiains this position. As soon as practicable in level flight and at desired cruise airspeed, the miniature aircraft should be moved to a position that aligns its wings in front of the horizon bar or horizon fine. This adjustment may be anytime when varying loads or other conditions indicate a need. Otherwise, the position of the miniature aircraft should not be changed for flight at other than cruise speed. This is to make sure thet the attitude indicator will display a
true pjcture of pitch attitude in all maneuvers.
NOSE LOW
NOSE HIGH
Figure 3-8. Attitude Indicator showing Indications of pitch attitude
15 DECEMBER 1984 UPDATE' FM 1-240 33

b. When using the attitude indicator in
applying pitch attitude corrections, control pressure should be extremeiy light. Movement of the horizon bar above
or below the miniature aircraft of the
attitude indicator in fixed-wing aircraft
should not exceed one-haif the bar width
(fig 3-9, A). In rotary-wing aircraft,
movement should not exceed one bar
width (fig 3-9, B). If further change is
required, an additional correction of not
more than one-half horizon bar width will
normally counteract any deviation from
normal flight.
3-14. Altimeter If the aircraft is maintaining level flight,
the altimeter needles will maintain a
constant indication of altitude. If the altimeter indicates a loss of altitude, the
pitch attitude must be adjusted upward to
sfop the descent. If the altimeter indicates a gain in altitude, the pitch
attitude must be adjusted downward to
stop the climb (fig 3-10). The altimeter
can also indicate the pitch attitude in a
climb or descent by how rapidly the needles move. A minor adjustment in
pitch attitude may be made to control the
rate at which altitude is gained or lost. Pitch attitude is only used to correct
small altitude changes caused by
external forces as turbulence or up and down drafts.
34
A FIXED-WING AIRCRAFT
\ \ . I I \ I /
~~ ~
-----+-- .....
-~- -;-
-;- '3 0--
JJ.I ~
B. ROTARY-WING AIRCRAFT
Figure 3-9. Initial pitch correction
~
/'
A. NOSE LOW (DESCENDING)
......, B. NOSE HIGH (CLIMBING)
FI9ure 3-10. Altimeter Indications of pitch attitude
15 DECEMBER 1984 UPDATE oFM 1-240

3-15. Vertical speed indicator a. In flight at a constant altitude, the
vertical speed indicator, sometimes referred to as vertical velocity indicator or rate-of-climb indicator, will remain at zero. If the needle moves below zero, the pitch attitude must be adjusted
.
upward to stop the descent and return to level flight. If the needle moves above zero, the pitch attitude must be adjusted downward to stop the climb and return to level flight. Prompt adjustments to the changes in the indications of the vertical speed indicator may prevent any significant change in altitude (fig 3-11). Turbulent air will cause the needle to fluctuate near zero. In such conditions, the average of the fluctuations should be considered as the correct reading. Reference to the altimeter will help in turbulent air since it is not as sensitive as the vertical speed indicator.
(1) The amount of vertical speed is the rate at which the needle moves away from the zero position. This indicates the amount of pitch attitude adjustment that is required to return the needle to zero and stop any altitude change. An example would be a large deviation of the needle from zero or a rapid movement away from the zero position. This indicates that a large pitch attitude adjustment is required to return the needle to zero.
(2) When making corrections on the vertical speed indicator for the desired altitude, the correction must not be too large. Over-correcting causes the aircraft to overshoot the desired altitude. Nor should corrections be so small that the return to altitude is unnecessarily prolonged. As a guide, the pitch attitude should produce a rate of change on the vertical speed indicator about twice the size of the altitude deviation. For example, if the aircraft is 100 feet off the desired altitude, a 200-foot-per-minute rate of correction would be used.
b. During climbs or descents, the vertical speed indicator is used to change the altitude at a desired rate. Pitch attitude and power adjustments are made to maintain the desired rate of climb or descent on the vertical speed indicator.
c. When pressure is applied to the controls and the vertical speed indicator shows an excess of 200 feet per minute from that desired, overcontrolling is
indicated. For example, if attempting to regain lost altitude at the rate of 500 feet per minute, a reading of more than 700 feet per minu1e would indicate overcontrolling. Initial movement of the needle indicates the trend of vertical movement. The time for the vertical
speed indicator to reach its maximum point of deflection after a correction is
called lag. The lag is proportional to speed and magnitude of pitch change. In fixed-wing aircraft, overcontrolling may be reduced by relaxing pressure on the controls which allows the pitch attitude to neutralize. In some rotary-wing aircraft with servo-assisted controls, no control pressures are apparent. In this case, overcontrolling can be reduced by reference to the attitude indicator.
d. Some aircraft are equipped with an IVSI. The letters "IVSI" appear on the face of the indicator. This instrument assists in interpretation by instantaneously indicating the rate of climb or descent.
e. Occasionally, the vertical speed indicator is slightly out of calibration and will indicate a gradual climb or descent when the aircraft is in level flight. If readjustment cannot be accomplished, the error in the indicator should be considered when the instrument is used for pitch control. For example, an improperly set vertical speed indicator may indicate a descent of 100 feet per minute when the aircraft is in level flight. Any deviation from this reading would indicate a change in pitch attitude.
I 2 .5
, \VSI ~
--
~::. ~ SPEED
3
3 .5
2
Figure 3-11. The vertical speed Indicator as a pitch-Indicating Instrument
15 DECEMBER 1984 UPDATE. FM 1-240 35

3-16. Airspeed indicator The airspeed indicator gives an indirect
reading of the pitch altitude. With a
constant power setting and a constant
altitude, the aircraft is in level flight and airspeed remains constant. If the
airspeed increases, the pitch altitude has
lowered and should be raised. If the airspeed decreases, the pitch altitude
has moved higher and should now be
lowered (fig 3-12). A rapid change in
airspeed indicates a large change in
pitch; a slow change in airspeed
indicates a small change in pitch.
Although the airspeed indicator is used
as a pitch instrument, it may be used in
level flight for power control. Changes in
pitch are reflected immediately by a
change in airspeed. There is very IIltle
lag in the airspeed indicator.
3-17. Pitch altitude trim Incorrect selting of pitch altitude trim (fig
3-13) may result in a nose-high or a
nose-low pitch altitude unless corrective
pressures are maintained.
a. Proper pitch altitude trim for fixed- wing aircraft may be made as follows:
(1) Establish desired altitude wi1h
control pressure. (2) Relieve control pressure by
application of trim while maintaining
altitude. (3) Repeat above procedures until the
aircraft maintains an attitude without
constant pressure on the control.
Figure 3-13. Pitch attitude trim
b. Some rotary-wing aircraft have provisions for pitch altitude trim and
relief of control pressures. Pitch trim
adjustments on these <lircraft should be
made as follows: (1) Press force trim bulton or control
centering release button. (2) Establish desired pitch attitude. (3) Release force trim button or
control centering release button. (4) Repeat (1) through (3) above if
necessary.
3-18. Pitch altitude Instrument cross-
check a. The altimeter is an important
instrument for indicating pitch attitude in
level flight except when uSed In
conditions of exceptionally strong vertical
currents such as thunderstorms. With
proper power settings. any of the pitch /
'" '" "
'" /' '"
. "
'" " .--
"
, "
...... .
.... "'...
'... ,
Figure 3-12. The airspeed Indicator as a pitch attitude Instrument
36 15 DECEMBER 1964 UPDATE. FM 1-240
attitude instruments can be used to hold
reasonably ievei flight attitude. However,
only the aitimeter will give the exact
altitude information.
b. Regardless of which pitch attitude
control instrument indicates a need for a
pitch attitude adjustment, the attitude
indicator, If available, should be used to
make the adjustment.
c. Common errors in pitch attitude
control are- (1) Overcontrolling. (2) Improperly using power. (3) Failing to adequately cross-check
the pitch allilude instruments and take corrective action when pitch altitude
change is needed.

Section IV Bank Attitude Control
3-19. Straight flight The banking attitude (fig 3-14) of an aircraft is the angular relationship of the lateral axis to actual horizon. To maintain a straight course in visual flight, the wings or rotor(s) of the aircraft must be kept level with the actual horizon. In balanced flight, any deviation from a wings-level attitude produces a turn. During actual or simulated instrument conditions, the miniature aircraft and horizon bar of the attitude indicator are substituted for real aircraft and actual horizon. Therefore, banking attitude is accurately indicated. Instruments which indicate banking attitude are the attitude indicator, heading indicator, and turn. and-slip indicator (fig 3-14).
3-20. Attitude indicator The banking attitude is shown directly on the attitude indicator (fig 3-15). Banking is shown by the miniature aircraft wings assuming an angle in relation to the horizon bar and by the bank-index pointer moving from the zero position. The bank-index pointer will indicate the angle of bank of the aircraft by assuming a position in relation to the angle of bank reference marks at the top of the instrument face. The aviator must determine the direction of banking by reference to the miniature aircraft. The bank-index pointer moves in a direction opposite to the bank. In coordinated flight, maintaining the bank-index pointer at zero wil, prevent banking.
-- -.. -~ --
Figure 3-15. The attitude Indicator as a
bank-attltude instrument
3-21. Heading Indicator Although the heading indicator gives an immediate indication of turning (fig 3-16), its primary purpose is to indicate heading. not banking. In balanced or coordinated flight, the indication of a turn means that the aircraft is banking in the .direction <Jf the turn.-rhe-bank must be
corrected if the turn is to be stopped. The heading indicator aiso indirectly indicates the amount of bank the aircraft has assumed. If the heading is slowly changing, the amount of banking is
small. If it is rapidly moving, the amount of banking is large. If a fixed-wing aircraft continues to turn after the banking is corrected, the rudder trim should be checked for a possibie resetting.
3-22. Turn-and-slip indicator When the attitude indicator is not available, the heading indicator is used for bank-attitude control in straight flight. However, for making turns, the turn needle must be used.
.'1'.
,- / ......
:~/---......J
.ir.\i. I. .1
4 HJN TURN
Figure 3-14. Bank-attitude instruments
"figure 3-:16. -
The heading Indicator as a bank-attitude instrument 15 DECEMBER 1984 UPDATE oFM 1-240 37

a. Turn needle. The turn needle
indicates both direction and rate of turn. In balanced or coordinated flight, the
aircraft is not banking If the turn needle is centered. If the needle is displaced
from center, the aircraft is banking and
turning in the direction of displacement.
Re-centering the needle with smooth and
coordinated control movements will
remove any banking attitude and the
aircraft will fly straigl1t. Any deviation
from the exact center position must be
promptly re-centered to prevent turning
(fig 3-17). Accurate interpretaäon of the
needle position requires close
observation. In turbulent air, the needle will oscillate from side to side. Accurate interpolation of these fluctuations must
be made to detect attual turning. if the
deflection is equal on both sides of
center, the aircraft is flying straight. If the distance of deflection is greater on one
side than the other, the aircraft is turning in the direction of the greater deflection.
e - ~
-
- -- "'.... .',
-
.....'- -.... - -- Figure 3-17. The turn-and-slip Indicator as
a bank-attitude instrument
A. SLIPPING
38
b. T urn-and-slip indicafor bal/. Although the ball is combined with the
turn indicator as one unit, it is a separate
and independent instrument with its own specific function. The two parts of the
turn-and-slip indicator are, however,
normally read and interpreted together. If
the ball is off-center, the aircraft is
yawing (slipping or skidding). If the
aircraft is slipping, the ball is off-center (low wing) toward the inside of the turn
(fig 3-18, A). If skidding, the ball is off-
center (high wing) toward the outside of
the turn (fig 3- t 8, B). The ball of the
indicator shows quality of control
coordination (fig 3-18, C), whether in
turning or straight flight. In fixed-wing
aircraft, the displacement of the ball to
one side of center in wings-level flight
indicates the need for rudder. trim adjustment and possibly aileron trim. In a
rotary-wing aircraft, the displacement of
the ball to one side of center indicates
pedal adjustment. To keep the aircraft
from turning, a cyclic movement must be
made in the opposite direction.
B. SKIDDING
Figure 3-18. Slipping, skidding, and coordinated turn indications
15 DECEMBER 1984 UPDATE. FM 1-240
C. BALANCED

c. Turn coordinator. Recent years have seen the development of a new type of turn indicator, referred to as a
"Turn Coordinator" or "Pictorial Turn Indicator." In place of the conventional turn needle indication of rate of turn, both instruments pictured in figure ~19 display movement of the aircraft on the roll axis that is proportional to the roll rate. When the roll rate is reduced to
zero, the instrument provides an indication of the rate of turn. This new design features a realignment of the gyro in such a manner that it sensea aircraft movement about the yaw and roll axes and pictorially displays the resultant motion as described above. Both instruments also possess a dampening feature that provides a more stable indication than the conventional turn- and-slip indicator. The conventionai inclinometer (ball) is common to both instruments. It should be clearly understood that the miniature aircraft of the turn coordinator displays only rate 01
roll and rate of turn. It does not direclly display the bank angle of the aircraft.
~23. Bank-attitude trim a. In fixed-wing aircraft, an incorrect
setting of aileron or rudder trim will cause the aircraft to bank and turn. Resetting of the aileron and rudder trim tabs (fig 3-20) will correct the banking tendency.
b. In a fixed-wing aircraft, an incorrect setting of the rudder trim results in a
tendency to gradually skid out of a
straight flight path. A skid usually causes the aircraft to bank because it increases velocity and therefore the lift of one wing. Accurate trim adjustment facilitates precise bank control.
c. Rudder and aileron trim adjustments in fixed-wing aircraft should be made as follows:
. (1) Establish balanced flight in the
. desired attitude with control pressures. (2) Relieve rudder pressures with
rudder trim.
- ------ -
--..
"\ "
."- -::::-_~
Figure 3-20. Rudder and aileron trim
(3) Relieve aHeron pressure with aileron trim.
(4) Repeat process until the aircraft will maintain desired attitude.
d. Rotary-wing aircraft equipped with trim mechanisms should be trimmed as follows:
(1) Press force trim push button or control centering release button.
(2) Establish level flight with cyclic control with reference to the altitude indicator.
(3) Center the ball of the turn-and-slip indicator with pedals.
Figure 3-19. Pictorial turn Indicators
---.----------.--- - ----.-- ----"--- 15 DECEMBER 1984 UPDATE -FM 1-240
(4) Release force trim push bulton or control-centering release button.
(5) Repeat (1) through (4), as necessary.
~24. Bank Instruments a. All available bank-alt~ude
instruments are used to maintain straight flight and to perform turns. Maintaining straight flight in a balanced condition can be accomplished by using the heading indicator and the attitude indicator. If ne~her of these instruments is available, the turn needle must be used. For bank control in turns, the altitude indicator is
used; If not available, the turn needle must be used. I n all cases, the turn-and- slip indicator should be included in the cross-check to detect possible malfunctioning of the other bank control instruments and to check for a balanced flight condition.
b. Common errors in bank.altitude control are failing to- (1) Cross-check the heading indicator to maintain straight flight.
(2) Correct action promplly to return to the desired heading.
(3) Use altitude indicator properly. (4) .Control turn needle properly when
using the turn.and-slip indicator. (5) Exert correct pressures on rudders,
ailerons, pedals, or cyclic control.
Chapter 4 Basic Instrument Maneuvers
4-1. General Any instrument flight, regardless of how long or complex, is simply a series of connected basic maneuvers which can form the basis for both training and practice. These maneuvers allow the aviator to become proficient in
instrument interpretation, air..-aft altitude control, power control, and Instrument cross-check. Maneuver performance is first discussed when all flight instruments are operational; then it is discussed when some are non-operational (emergency panel).
Section I
Fixed Wing
4-2. Maneuver performance The method of performing each maneuver is discussed in~ially under the assumption that all flight instruments are operational (full panel). Then the performance of the maneuver is
discussed as if certain instruments are non-operational (emergency panel). Except where prohib~ed by regulation,
39

an emergency panel may be simulated
by covering the face of an instrument or by other simulated failure procedures.
4-3. Instrument takeoff An aviator should be proficient and fully
confident to take off with little or no visual references other than flight
instruments. For an instrument takeoff to
be performed, all flight instruments must
be operational. The aircraft operator's
manual explains the recommended
procedures for performing the instrument
takeoff. The, method outlined in a and b
beiow is general in nature and supplements the instructions in the appropriate operator's manual and
aircrew training manual.
a. The aircraft is aligned on the centerline of the takeoff runway and
allowed to roll forward for a short
distance. This ensures that the
nosewheel is centered. The brakes should be firmly held and the throttles should be advanced siightly above idling.
All flight instruments are checked for
correct indications and any checklist requirements should be performed. After
takeoff clearance is received, the aviator fully releases the brakes and smoothly
applies takeoff power. If there are any outside visuai references, they are for directional control in the Initial part of the takeoff roll.
b. Brakes are used only if absolutely
necessary for directional co.ntrol because
any use of them will extend the takeoff roll. As the takeoffprogresses,lhe
'
navigator shifts Irom outside references to the heading indicator and attitude
indicator. r>irectional control is .
maintained by reference to the heading' indicator. AileronS are used only if a
bank is indicated on the attitude
indicator. As the lakeoff roll progresses, the airspeed indicator is brought into the
cross'check along with the heading
indicator and the attitude indicator. When
the recommended airspeed is attained, the pitch attitude is adjusted on the attitude indicator as recommended by the operator's manual. The aircraft '
should then fly off the ground.
c. The aviator maintains directional
control after takeoff with the heading
indicator, recommended pitch attitude
and level wings on the attitude indicator.
The aviator then begins to include all
o.ther flight instruments in the cross-
check. The aviator waits for the altimeter and vertical speed indicator to begin indicating a climb befo.re performing any
after-takeoff checklist. If necessary, the pitch attitude is carefully adjusted to
cause the airspeed to. increase at a .
steady rate toward recommended climbing speed. At the same time, the vertical speed indicator should show a
'steady climb. The bank attitude is
controlled to maintain or correct back to.
the takeoff heading, The turn needle is
cross-checked to' see il the bank attitude
40
is being indicated correctly on the
attitude indicator. As the recommended climb airspeed is reached, power is
reduced as recommended for climb and pitch attitude is adjusted to maintain ciimbing airspeed.
d. Common errors in instrument takeoffs are failure to-
(f) Align the aircraft properly on the
runway. (2) Use sufficient nosewheel steering
or rudder to maintain takeoff heading.
(3) Maintain takeoff attitude until climb is indicated.
(4) Allow airspeed to go too high
before applying takeoff attitude. (5) Adjust proper pitch attitude while
aircrall is accelerating to climbing
airspeed.
4-4. Stralght,and-Ievel flight
a. A/titude control. The altimeter
sho.uld be cross-checked to see if the
desired ,altitude is being maintained. If
not, the pitch attitude is corrected on the
attitude indicator in order to maintain or
correct back to the desired altitude. The indications of the verticai speed indicator
are used to detect and alert the aviator to possible changes in the desired
altitude. If the attitude indicator becomes inoperative, the vertical speed indicator
can assist in maintaining and correcting
to the desired altitude.
b. Heading control. The heading
indicator is cross-checked to see if the
desired heading is being maintained. If
not, the banking attitude is corrected on the attitude indicator to maintain or
correct back to the desired heading. The turn needle is checked to see if the banking attitude is correctiy displayed on the attitude indicator. The standby or magnetic compass is used to. see if the heading is being displayed correctly on the heading indicator. If the heading
indicator becomes inoperative, the
attitude indicator can be maintained or
corrected back to the desired heading on the magnetic compass. If both the heading and attitude indicators become inoperative; the turn needle is used to
make straight flight co.rrections and heading corrections on the magnetic
cámpass.
c. Airspeed contro./. The airspeed
indicator is cross-checked to see if the desired airspeed is maintained. If no.t, the pitch co.ntrol instruments are adjusted in
order 10 maintain or co.rract back to the desired airspeed. Power control will be adjusted as required to maintain a
constant altitude. If the airspeed indicato.r
becomes inoperative, power settings that
have previously produced the desired
airspeed are used for any maneuver or configuration.
d. Power contml. The power normally
required or recommended for a
maneuver is used by referring to the
power control instruments. If the po.wer appiication doesno.t produce Ihe desired
15 DECEMBER 19B4 UPDATE' FM 1-240
airspeed, then a correction is made by
using the power control instruments.
e. Trim. Changes in power appiied,
airspeed, configuration, altitude, and loading require trim changes. The desired aircraft attitude and balanced flight is maintained by using trim adjustments.
f. Errors. Common errms in straight-
and-level flight are failure to- (1) Maintain heading. (2) Use correct procedures to. correct
heading. (3) Use attitude indicator properly for
maintaining altitude. (4) Use power control instruments for
airspeed adjustments. (5) Cross-check all instruments to
detect any instrument maifunction. (B) Keep the aircraft trimmed for
balanced flight.
4-5. Straight climbs and descents
a. Constant airspeed, constant power climbs. .T a enter a constant airspeed climb using recommended climb power settings, Ihe pitch attitude is adjusted on the attitude indicator to start the aircraft climbing. A pitch a1titude that has previously been known to enter the climb smoothly and gradually sho.uld be used.
There may be a few seco.nds before Ihe altimeter and vertical speed indicator begin to indicate a climb. Power Is
advanced on the power controi
instruments to the recommended setting. To maintain the desired climbing
airspeed, the attilude is adjusted as required and the power instrumenls are
cross..-checked in order to maintain a
constant power setting. Variations in the
indication of the vertical speed indicato.r
may be used to alert need for pilch adjustments.
b. Constant airsþeed, constant rate
climbs. When entering this climb, the pitch attitude is adjusted as recommended in a above. The power is
adjusted to the settings that have previously been used to perform Ihis
maneuver. As the vertical speed indicator approaches the desired rate of
ciimb, the pitch attitude is adjusted to .
maintain that rate of climb. The power is adjusted as necessary to maintain the
desired airspeed. c. Lave/off from climbs. As the aircraft
approaches the desired altitude, the pitch a1titude is adjusted on the attilude
indicato.r.This is done so that the rate of
climb slowly decreasas and the altimeter sto.ps onthe desired altitude, As a guide,
10 percent of Ihe vertical speed indicator
is used to compute th,e altitude to start this pitch attitude adjustment. In other
words, when leveling off at 5,000 feet with a rate of climb of BOO feet per minute, the pitch attitude adjustment is
started as the altimeter moves past
4,920 feet. It is important to adjust power as required to maintain a desired

airspeed or adjust to a computed power setting for cruise operation.
d. Constant airspeed, constant rate descent. To enter this type descent when a change in airspeed is not desired, it is necessary to adjust the pitch attitude on the attitude indicator. At the same time, power is reduced as required to maintain the airspeed. As the vertical speed approaches the desired rate of desce~t, the pitch attitude is adjusted to maintain this rate. Two methods are recommended for entering this type descent when a reduction in airspeed is desired. In both methods, once the descent has been stabilized, it is necessary to use pitch attitude adjustments to maintain the desired rate of descent and power to maintain the desired airspeed.
(1) If there is not a requirement to leave the altitude immediately, the power is reduced to that setting which will normally maintain the desired descending airspeed. Altitude is
maintained with pitch attitude adjustments until the airspeed approaches the descending airspeed. Then the pitch attitude is lowered 10 enter the descent.
(2) If there is a requirement to leave the altitude immediately, the pitch attitude is lowered to enter the descent. At the same time, power is reduced to a setting well below that which will normally maintain the airspeed in the descent. This will allow the airspeed to gradually decrease to that desired for the descent.
e. Leveloff from descents. The altitude can be computed at which pitch attitude must be adjusted to stop the descent on the desired altitude. This is done by using 10 percent of the rate 01 descent indicated on the vertical speed indicator. To level oft at 5,000 feet from a descent rate of 500 feet per minute, the leveloft should be started at 5,050 feet. As the desired altitude is reached, it is maintained with pitch attitude control and the power is adjusted to maintain the desired airspeed.
f. Heading control. Heading control is maintained as recommended in
paragraph 4-4b. g. Trim. Adjusting trim maintains
desired aircraft attitude and balanced flight.
, h. Emergency panel. If the attitude indicator is not operational, level flight and heading control is maintained as recommended in paragraph 4-4. During a constant airspeed, constant power climb, using the airspeed indicator makes possible the required pitch attitude adjustments. The trend of the vertical speed indicator also aids in pitch attitude control. During a constant airspeed- constant rate climb, or a constant airspeed-constant rate descent, the vertical speed indicator is used for pitch attitude adjustments.
Î. Errors. Common errors in straight climbs and descents are failure to- (1) Maintain heading.
(2) Coordinate pitch attitude and power adjustments where necessary.
(3) Lead properly when leveling off. (4) Make pitch attitude adjustments
with the attitude indicator. (5) Adjust pitch attitude and power as
altitude or configuration changes.
4-6. level turns a. Entry. To periorm a level turn
(figure 4-1), it is important to first establish a bank in the direction of turn by coordinated pressure on the ailerons and rudder. Both pitch attitude and bank attitude are controlled by the attitude indicator during the entry. As the banking pointer reaches the desired angle of bank, it is necessary to relax the control pressures or use slight opposite control pressures as may be required to stop and hold the bank. The indicalion of the turn needle is cross-checked to see if it is deflected in the direction of the turn and that the deflection is proportional to the angle of bank. Cross-checking of all instruments is continued. Loss of vertical lift may require an adjustment of pitch attitude to hold altitude. Any pitch attitude adjustment may require a power change if it is desired that a constant airspeed be maintained.
b. Recovery. To recover to straight- and-level flight, coordinated pressure is applied to the ailerons and rudder in the opposite direction o.f turn. Pitch and bank attitudes are controlled by reference to the attitude indicator. The control pressures are continued so that the banking pointer moves steadily to the zero bank position. Either the control pressures are relaxed or opposite control pressures are slightly used as required to stop and hold the heading painter at zero. Cross-checking of all instruments is
resumed. If the pitch attitude was adjusted during the turn, it's important to be prepared at the first indication of a climb on the altimeter or vertical speed indicalor to re-adjust the pitch attitude to maintain altitude. If the power was adjusted during the turn, the former level flight setting should be set when the desired airspeed is reached. After rolling out of a turn, the attitude indicator display may be slightly inaccurate because of procession errors caused by the turn. Until the attitude indicator is operating properly, the heading and pitch attitude control instruments are cross- checked for any required attitude adjustments.
c. Trim. Trim is adjusted as necessary to maintain the desired attitude and balanced flight.
d. Emergency panel. Without the use of the attitude indicator, the turn entry, rate of turn, and recovery from the turn are controlled by reference to the turn needle,
.
15 DECEMBER 1984 UPDATE. FM 1-240
e. Ërrors. Common errors in level turns are failure to- (1) Coordinate aileron and rudder pressures during the entry and recovery.
(2) Correct any loss of pitch attitude during entry and recovery.
(3) Stop the bank at the desired angle. (4) Stop the rollout when the banking
pointer returns to zero. (5) Maintain a constant rate of turn.
41

.w. I c::::=::J
.1: ~!. .. ....t;IoI"
~
.
, J ( 9. 2- -8 1
G n. 3- -7 ,.. 4 6 5 ' I
,
130Kr
"" / --K-J~~--
~
4-7. Turns to headings
a. Entry and recovery control
techniques for turns to headings are the
same as those for level turns. The angle of bank should not be more than the
number of degrees to be turned and
should not exceed the angle of bank for
a standard rate turn (fig 4-2). To roll out
of the bank with the heading indicator on
the desired heading, the rollout must
begin before reaching the desired heading. The "lead" or early initiation of
the rollout will depend on the angle of
bank and rate of roll being used. As a
guideline, there is 1 degree of lead for
every 2 degrees of bank. For example, in
a right turn to a heading of 90 degrees and using 28 degrees of bank, the rollout
would begin as the heading indicator
passes 76 degrees. To determine if the
proper amount of lead was used, the
heading indicator is checked after the
wings are level. A variation from the
desired heading would indicate the need
for a change in lead for future turns.
42
Figure 4-1. Level turns
b. If the attitude indicator is not
available, the rollout lead can be determined. This is done by using the
same number of degrees for rollout as
were required to establish the turn on
roll-in. If the heading indicator is not
available, timed turns or compass turns
will be required.
c. Common errors in turns to headings
are failure to use- (1) Proper bank for number of degrees
to be turned. (2) Proper lead in rollout. (3) Same rate of roll during roll-in and
rollout of the turn.
15 DECEMBER 1984 UPDATE' FM 1-240
4-8. Steep turns a. Turns greater than standard rate or
any turn exceeding a 3D-degree bank is
considered a steep turn. The rate of turn is determined by the attitude indicator or
the turn-and-slip indicator. A 4-minute
turn needle should indicate a minimum of
a 3-needle width deflection. A 2-minute
turn needle should indicate a minimum of
a 1 Y2-needle width deflection. This type
of turn is seldom necessary or advisable
in instrument weather. However, it is a
good test of ability to react quickly and
smoothly to changes in attitude of the
aircraft. Regardless of the degree of
bank, the techniques of entry and
recovery are the same in steep turns as
any other turn. When the bank is steep,
however, it is more difficult to control the
pitch attitude. This is due to the large
variation in the vertical lift components.
b. Pitch attitude control instruments should quickly be cross-checked during
the entry to the turn. This is so the pitch
attitude may be adjusted upward at the

------- A
Figure 4-2. Turns to headings using heading Indicator
first indication of any altitude loss. After the desired angle of bank has been established, there may be a requirement to hold aileron and rudder pressures opposite the direction of turn. This is to prevent the bank from increasing. The tendency in steep turns for the bank to increase is "overbanking tendency." The slight extra speed of the wing on the outside of the turn increases as the bank increases. At steeper angles of bank, this extra speed Will overbalance the lateral stability of the aircraft. This will cause the bank to continue to increase unless control action is taken to resist it.
Power is increased as required to maintain the desired airspeed. On the rollout, the pitch attitude is decreased as required Ie maintain altitude and the power is adjustéd as required to maintain airspeed. The' use of instruments in the steep turn is the same as in standard rate turns.
c. Common errors in steep turns include failure to- (t) Maintain altitude.
(2) Maintain proper airspeed. (3) Use proper power and pitch
attitude control during entry and recovery.
(4) Use proper bank attitude and pitch attitude control.
4-9. Timed turns 8. in a timed turn, the heading of the
aircraft is changed a definite number of degrees with reference to the clock and the turn needle. It may be easiest to start the timing when the second hand is at the 3-, 6-, 9-, or t 2-o'clock position.
b. Before practicing timed turns, the turn needle is calibrated to determine the accuracy of the needle indications. A turn is established with the needle
deflection for a standard rate turn and the angle Of bank is noted on the attitude indicator. As the second hand passes a convenient point to start the timing, the heading is noted on the heading indicator. At each to-second interval, the heading is noted again. If the heading change is 30 degrees at each interval, the turn needle deflection is correct for a standard rate turn (3 degrees per second). If not, the angle of bank and resulting needle deflection are changed until the turn is standard rate (3 degrees per second). When the turn needle has been calibrated in both directions of turn, the corrected deflection is noted, if any, and applied during all timed turns. .'
c. Timed turns are normally entered from straight'and-Ievel flight. T 0 enter a
timed turn, hooding is maintained until the second hand arrives at the desired position, then, roll.in starts.
15 DECEMBER 1984 UPDATE. FM 1-240 43

d. The number of degrees to be
turned governs the length of time and
rate of turn. Turns of 20 degrees or more
are made at standard rate; turns of less
than 20 degrees, at half-standard rate.
Normally, turns to headings will be in the
shortest direction of turn. For example, starting a timed turn from heading of
north (fig 4-3, A) and turning right to a
heading of 120 degrees (fig 4-3, S, C, D)
takes 40 seconds. If the time and the
roll-in are started with the second hand
in the 12-0'clock position, the rollout will
start when the second hand is on the 40-
second position (fig 4-3, C). The same rate of rollout was used to roll into the
turn. In this way, the delay in reaching a
standard rate turn indication on roll-in will
be canceled by the delay in reaching a
wings-ievel condition on rollout. Upon
completion of the rollout, the aircraft
should be on the desired heading (fig
4-3, D). Example can be shown using a
haif-standard rate turn (1112 degrees per second). It is easier to compute the time by first computing for a standard rate
turn (3 degrees per second) and then doubie the time.
e. Common errors in timed turns include failure to-
.
(1) Enter in the shortest direction of
turn. (2) Apply the proper rate of turn. (3) Enter and recover from timed turns
at the same rate. (4) Compute time correctly for turns.
4-10. Climbing and descending turns a. To execute climbing and
descending turns, the technique used in
straight climbs and descents is combined with various turn techniques. For proficiency training, it is recommended that the climbs and descents be made at a definite rate and that the maneuver be checked against time. This is done for
both altitude change and degrees of
turn. If the timing is in error, the level off is made on the desired aititude and roll
out of the turn on the desired heading. When entering a turn while performing a
rate climb or descent, the aviator should
be prepared to adjust the pitch attitude upward to maintain desired verticai
speed. Power is then added to maintain airspeed.
b. Common errors in climbing and descending turns are failure to-
(1) Detect a need for a change in rate
of turn or vertical speed. (2) Control proper power, pitch
attitude, or bank attitude. (3) Recognize errors associated with
turns, timed turns, climbs, and descents.
44
A. START TU RN
B. BANK ESTABLISHED
C. START ROLLOUT
D. TURN COMPLETED
Figure 4-3. Timed turns
15 DECEMBER 1984 UPDATE .FM 1-240
."'f" "" I '.'"
. .
.
-,' I >S
...
~9 :', ~.-~3~
.
.
", 6 ,- f
',' 11".;(,,8"
\.~'\ ~ 1,1' I {
,,'J2'.' i9. ;.y. :,
~Á._,":,3-; " 6
-
" ,~
-'lllrl,';'"''
".,\\'Ir", .....:-' 12 .IT,
~ 'I D"'''! '.
",,9 .,/ ':
:(1._,":,3-; " 6
.-
" ,'"
.'(",IL\\\-"

4-11. Compass turns
a. The magnetic compass is a basic direction-indicating instrument. If all other directing-indicating instruments fail in
fiight, the magnetic compass can determine the aircraft heading. However, the inherent characteristics of the compass must be understood to be able to turn the aircraft to a magnetic heading
and maintain it.
b. The pilot may consider an angle of bank between 12 degrees and 18
degrees and the rate of turn not to
exceed a standard rate. The amount of lead or lag used when turning to headings of north and south varies with, and is approximately equal to, the latitude of the locality over which the turn is made (fig 4-4). This lead or lag is at a
minimum over the equator and increases as the latitude increases, reaching its
maximum at the polar regions. The angle of bank must be accurately heid to attain success in turns to magnetic compass headings. The compass reading is
reliable only when the aircratt is in a
wings-tevel and constant-pitch attitude at a constant airspeed.
./
c. In the Northern Hemisphere, when turning to a heading of north, the rollout lead must be the number of degrees equal to the latitude plus one-half of the angle of bank used in the turn (fig 4-5). An example would be during a left turn to a heading of north in a locality where the latitude is 30 degrees and the angle of bank is 15 degrees. The rollout would start when the magnetic compass reads 37.5 degrees (30 degrees plus one-half of 15 degrees). To turn to a heading of south, the aircraft is turned past south the number of degrees equal to the latitude, minus one-half the angte of bank used in the turn (fig 4-5). For example, when turning to the right to a
heading of south, the rollout is started when the magnetic compass reads 202.5 degrees (180 degrees plus 30 degrees minus 7.5 degrees). When turning to a
heading of east or west, the usual lead for rollout (one-half the angle of bank) is
used. When turning to other than cardinal headings, the lead or lag must be interpolated. South of the equator, lead and iag are reversed.
d. Common errors in compass tums include failure to-
MAGNETIC COMPASS
LAGS WHEN MAKING
TURN S TO T HE NORTH
~~ ~.-f~~ I I. ;J.iJ.
~,Wl~ N
E
"~. -".-::;~' , .'
~âuili ili1~ MAGNETIC COMPASS
.
OVERSWINGS WHEN MAKING
TURNS TO THE SOUTH
S ,
Figure 4-4. Compass turns
15 DECEMBER 1984 UPDATE. FM 1-240
(1) Level the wings upon completion of turn.
(2) Maintain an angle of bank of 12
degrees to 18 degrees. (3) Maintain proper attitude.
4-12. Unusual altitudes An unusual attitude is any attitude of the aircraft not required for normal instrument flight. An unusual attitude may result from anyone or a combination of several causes. Some of these causes are turbulence, vertigo, confusion, distraction from flight instruments, and failure of flight instruments.
a. Recognition. Normally, an unusual attitude is recognized in one or more of the following:
(1) An attitude on the attitude indicator not typical of the maneuver being performed or an attitude that is rapidly changing to an extreme position of pitch or bank.
(2) Indications on the heading indicator or turn needle of th'e aircraft entering a rapid turn from straight flight
or increasing its rate of turn extremely from a normal instrument flight turn.
(3) Indications of the altimeter, airspeed, and vertical speed rapidiy changing from those indications that are normal to the maneuvers being performed. When any of these situations occur, the speed of cross-checking is
increased to determine quickly if the problem is caused by failure of one or more instruments.
b. Instrument failures. Failure of an instrument can be detected by comparing its indications with the other instrument indications. Common failures are those of the attitude indicator, especially if it is the spillable type, and the heading indicator. A quick reference is needed to the turn-and-slip indicator for verification. This would show whether or not the turn indicaUons on the attitude indicator or heading indicator are normal for the maneuver being performed. Reference can be made to the other pitch attitude control instruments (airspeed indicator, altimeter, and vertical speed indicator). This will verify whether or not the pitch attitude on the attitude indicator is normal for the maneuver being performed. However, if the aviator cannot confirm instrument failure with a
quick cross-check, prompt application of the procedures should be made for recovery from unusual atUtudes.
c. Recovery. These procedures should be modified or supplemented by any instructions contained in the operator's manual for the aircraft. When a recovery from an unusual attitude is required, the initial control acUons should be made. This can be done by using the power instruments, altimeter, airspeed indic~ vertical speed indicator, and turn<a1iÕ-slip
45

indicator. The indications of the attitude some of the pressure to adjust pitch
indicator and heading indicator should be attitude should be released at this time. disregarded until proper operation can be The attitude indicator and heading
assured by cross-checking them with indicator are incorporated in the cross- other instruments. The nonspillabie check if they appear to be operating
attitude indicator may be used when normally. If required by the instructor or if
known to be operating correctly. operating under direction of ATC, action
(1) Control movements should be should be taken to return to the original
smooth, but applied firmly enough so heading, altitude, and airspeed..
.
that the aircraft will promptly move to the (2) The aircraft may be In a climbing
desired attitude. Coordinated movement or nose-high pitch attitude as shown by a
of the control will hasten the recovery gain of altitude, a loss of airspeed, or an
and prevent abnormal stress on the indication of a climb on the vertical
aircraft. If the aircraft is in a diving or speed indicator. If so, the aviator should
nose-low pitch attitude, it will be shown apply power In proportion to the
by a loss of altitude, an increase in Indication and trend of movement of the
airspeed, and an indication of a descent airspeed Indicator. Downward pitch
on the vertical speed indicator. The attitude correction is applied until the
aviator reduces power in proportion to altimeter and airspeed movements begin
the indication and trend of movement of to cease. The turn needle and ball are
the airspeed indicator and centers the centered. Then as the altimeter and
turn needle and ball with coordinated airspeed start to reverse their movement,
aileron and rudder pressure. An upward the aviator releases sorne of the control
pitch attitude correction is also applied pr~ssure that was reqUIred for the pitch
until the altimeter and airspeed attitude adjustment. The remaining
movements begin to cease. The aircraft procedures are the same as those is then approaching level flight. When performed above after recovering from a
the indications of the altimeter and descending attitude.
airspeed indicator begin to reverse their d. Control actions. Remember that the direction of movement, the aircraft is initial recovery actions can be applied passing through ievel flight attitude. To simultaneously, but the sequence of
remain at or near .Ievel flight attitude, actions should not be changed. Prompt
INNER NUMBERS-DESIRED MAGNETIC HEADING OUTER NUMBERS-APPROXIMATE lATITUDE ERROR
NORTH 30.
3600
3300 30.
45.
300 BEFORE
(+)\1, ANGLE BANK
o. 2100 90. o' WEST EAST
AFTER
(-)\I, ANGLE BANK
1800
30. SOUTH
46
Figure 4-5. Compass ~urn maneuver procedure
15 DECEMBER 1984 UPDATE. FM 1-240
power adjustments in a nose-high attitude will aid in preventing a stall or spin. In a nose-low attitude, prompt power adjustments will aid in preventing
excessive buildup of airspeed and loss of altitude. A prompt correction, such as a
banking attitude in a dive, will aid in
adjusting the pitch attitude and in
preventing excessive loss of altitude. Prompt lowering of the pitch attitude in a
climbing attitude will aid in preventing a
stall or spin. In all cases, prompt, smooth, coordinated control actions should be taken. These actions should be taken to recover from the unusual attitude with a minimum change in
altitude and without exceeding the limitations of the airframe or engine.
e. Spatial disorientation. After recovery from an unusual attitude, the aviator may suffer from spatial disorientation or vertigo for some time. Instrument cross- check must be continuous and an attempt be made to reiax any unneeded pressures on the controls. This gives the aircraft an opportunity to resume balanced or coordinated flight. An uncoordinated flight condition will frequently induce or prolong spatial disorientation. Relaxing the control pressures will aid in preventing the application of unneeded control pressures that may be induced by spatial
disorientation.
f. Spins. If an unusual attitude results in a spin, the aviator applies recovery procedures as outlined in the operator's manual for the aircraft. A spin is
indicated on the flight instruments in the .
following manner: (1) Turn needle displaced fully in the
direction of spin, with the ball usually displaced fully in the direction opposite to the turn needle. However, occasionally the ball will oscillate back and forth across the center of the tube.
(2) Needie of the airspeed indicator will be hovering at the stall airspeed.
(3) Vertical speed indicator will indicate a high rate of descent.
(4) Altimeter will indicate a rapid loss of altitude.
(5) Indications of the attitude indicator and heading indicator should be disregarded as they will probably be
erroneous or too difficult to use for a
recovery. After spin recovery procedures are applied, the turn needle should be closely checked for a sudden movement back toward center. This indicates that the rotation of the aircraft has been stopped. The rudder pedals are promptly
centered so that the aircraft will not begin rotation in the opposite direction. The recovery is completed by using the
procedure for recovery from a dive. Pitch
adjustments are made carefully while the airspeed is still low and reference is
-
--- --- -
--

made to the turn-and-slip indicator to
ensure that the wings remain level. g. Effors. Common errors in recovery
from unusual attitudes are failure to- (1) Adjust power adequately. (2) Execute procedures in incorrect
sequence. (3) Recognize level flight pitch
attitude. (4) Allow excessive altitude variation
during recovery. (5) Maintain requ~ed heading. altitude,
or airspeed after recovery.
Section II Rotary wing
4-13. All-weather operations Since the advent of helicopter flight, field commanders have desired the use of helicopters for maneuvers in both good and adverse weather conditions. This is in order to gain tactical advantage and eiement of surprise by increased mobility. The maneuvers discussed in this section are designed to develop proficiency in the attitude control of rotary-wing aircraft. These maneuvers can be considered as the first step in fulfilling the requirement of all-weather operations.
4-14. Maneuver performance a. The basic principle of helicopter
instrument flight under any weather condition stems from the application of fundamentals for visual flight rules (VFR) for helicopter flight. There are only two eiements of control in all aircraft-the attitude of 'he aircraft to the horizon and the applied power. Therefore, all maneuversmupt be. based solidly upon attitude and pòwer control references. Airspeed isa nesuifofattit\Jde control; altitude is à fE!SLItt of power control. To properly charige'\o or hold any desired altitude, there must be a tentative estimate ot'b~cpÒwer settings for climb, cruise, and descent.
b. The method of performing each maneuver presupposes full panel and emergency panel, with the exception of the instrument takeoff, The instrument takeoff is performed with full panel. Except where prohibited by directives, emergency panel is simulated by covering one or more of the flight instruments or by deactivating certain flight instruments.
c. Airspeeds and power settings will be as recommended in the operator's manual for the aircraft.
4-15. Instr\Jment takeoff a. The following procedures for
making an instrument takeoff will be modified or changed as necessary to conform with any procedures set forth in
the operator's manual for the aircraft: (1) The attitude indicator is adjusted
by setting the miniature aircraft as
appropriate for the aircraft being flown. After the aircraft is aligned with the runway or takeoff pad, the parking brakes are set or the toe brakes are applied. This is to prevenl forward movement of helicopters equipped with wheel-type landing gear. If the parking brake is used, it must be unlocked before starting the takeoff. Sufficient friction should be apptied to the collective pilch control to minimize overcontrolling and to prevent collective pitch creeping. However, in order not to limit pitch control movement, the application of excessive friction should be avoided.
(2) After a recheck of all instruments to see if they are operating properly, start the takeoff (fig 4-6) by applying collective pitch and a predetermined power seiling. Iv!ore power is used than necessary for hovering, but not exceeding maximum allowable power, depending on the aircraft being flown. Power is added smoothly and steadily to gain airspeed and altitude simultaneously and to prevent setUing to the ground. As power is applied and the helicopter becomes airborne, pedals are used initially to maintain the desired heading. At the same time, forward cyclic control is applied to start the acceleration to climbing airspeed. In the initial
acceleration, the attitude of the !\ÌI"CI"aft as read from the attitude indicatOr should be one to two bar widths below the horizon. As airspeed increases to the appropriate climb airspeed, the nose of the aircraft is adjusted gradually to the climb attitude. As climbing airspeed is
reached, power is reduced to the climbing power setting and ~ejs a
transition to fully coordinated flight, "
(3) During the initial climtiQut: minor :
corrections to heading shoúld .be made with pedals only until sufficient airspeed is attained to make a transition to coordinated flight. A rapid cross-check must be started at the same time the aircraft leaves the ground and should include all available instruments.
.
b. Common errors in the instrument takeoff include failune to-
'
(1) Mailiiain heading. (2) Control pedals. (3) Use required power. (4) Adjust pitch attitude as climbing
airspeed is reached. (5) Cross-check all available
instruments. (6) Control pitch altitude.
4-16. Straight climb a. The straight climb (fig 4-7) can be
entered from normalcruise. b. To enter a climb from normal
cruise, power is increased to the setting which will produce a 500 foot-per-minute rate of climb. As power is increased, a
correction for trim is made with pedals. If
cruise and climb airspeeds are the same, 15 DECEMBER 1984 UPDATE. FM 1-240
there will be no apparent change of attitude, as read from the attitude indicator. If the amount of power applied does not produce the desired rate, minor adjustments are made. As a rule of thumb, in a UH-1 helicopter, for example, a change of 1 torque pound will usually change the rate of climb 100 feet per minute.
c. During climb, the heading, attitude. and airspeed are maintained with cyclic
control. Rate of climb is controlled with power and trim is .maintained with pedals. Although the amount of lead varies w~h aircraft and individual techniques, the lead is normally 10 percent rate of climb.
d. To level off at normal cruise, the cyclic is adjusted to establish the desired attitude with reference to tne attitude indicator. Power is adjusted to maintain normal cruise airspeed.
e. Common errors in straight climbs include failure to-
(1) Apply proper use of power. (2) Avoid overcontrolling pitch attitude. (3) Maintain heading. (4) Level off at the desired altitude. (5) Maintain adequate cross-check.
47

0' \
10
14020 _'20
/
10Ó~o,~0- /80 60
. II' \,' ", ,""1
>' ~\~.. '
<':I' It.-'~/
:
'" ,,,, 1:,'
c.
=:-~~ "/
U,I~:..
. / ~ -'
~, I
'J 9 ,<ï.. ,,'"
'J I I ~ \ \ \ ,'\ ~
'140 20
120
.-cfcK .JTS 40 IU'
-
060 / '
48
~ Figure 4-6. Flight lristruments during the takeoff
12 0"'"
:3
,;
vEt:. "
.
~ ;'f L~:-- '- 3
2
-
-
- ~
Figure 4-7; Straight climb
15 DECEMBER 1984 UPDATE. FM 1-240
-

4-17. Slralght-and.Jevel flight a. Exact straight-and-Ievel flight is
possible only under ideal conditions, which rarely exist. Turbulence may cause changes in the helicopter's attitude, altitude, and heading. In every flight attitude, the forces acting on the helicopter have a definite relationship. These forces, which are lift, weight, drag, and thrust, must be in balance for straight-and-Ievel, unaccelerated flight. When an instrument indicates a need for an adjustment to maintain a given performance, other instruments will reflect the necessary amount and direction of adjustment. For example. if the airspeed indicator shows a decrease in airspeed, the torque pressure or altimeter will indicate the adjustment to be made in power or altitude. When altitude, airspeed, and level flight are being maintained, the miniature airplane of the attitude indicator should be adjusted to reflect level flight attitude. Thereafter, any deviation in attitude can
be read directly from the attitude indicator (fig 4-8). Since the miniature aircraft is set for levei flight at normal cruise, it will be seen as an approximate one-bar above-the-horizon indication when the aircraft is in level flight at slow cruise. Corrections are made for attitude when any deviation is observed.
b. Any deviation from the desired heading will be shown on the heading indicator. Immediate and smooth application of cyclic control is initiated to return the aircraft to the desired heading. The quicker a need for correction is
observed, the smaller the amount of correction needed. For deviations of 20 degrees or more, use a standard rate turn. For deviations of less than 20 degrees, a half-standard rate turn is sufficient. Any time an instrument indicates a change in attitude, correction should be made. Then, instead of watching that particular instrument to see the effects of adjustment, the cross- check is continued before finally
15 DECEMBER 1984 UPDATE. FM 1-240
returning to the original instrument. In this way, the entire panel will reflect the total effect of adjustment. A helicopter does not remain in any given attitude. Therefore, by the time a cross-check has been completed and necessary adjustments have been made, another cross-check must be initiated.
c. During straight-and-Ievel flight, heading and altitude are maintained with cyclic control, airspeed is maintained with power, and trim is maintained with pedals. Power is used to adjust minor variations of altitude only if the desired altitude cannot be maintained by varying pitch attitude without exceeding + 1 0 knots airspeed.
-
d. Common errors in straight-and-Ievel Bight include failure to- (1) Maintain heading.
(2) Maintain attitude. (3) Cross-check all available
instruments. (4) Avoid overcontrolling power and
pitch attitude.
49

\ ,'IJ;, f'l : \ ,
'I'~ ~\\.\ 7-\ 2.J ip./~~
.
r
,,~ .
'b.:- ...:: '-.. - -
<f) ." ----+v.. -
'-.."'--"'- ":~c;.
~,~ //,4 9 'î- "" í
II I' 1\ 1\ \
-.
Figure 4-8. Stralgl1t.andRlevel1light
50 15 DECEMBER 1984 UPDATE. FM 1-240

4-18. Straight descents
a. Straight descents can be entered from either normal or slow cruise. To enter a descent (fig 4-9), power is
reduced to the setting which results in
the desired rate of descent. To maintain trim as the power is reduced, a
correction for torque is made with pedals. If the initial power reduction does not produce the desired rate of descent, additional adjustment is made using the rule of thumb described in paragraph 4-16b.
" 0
10 I
,,'140 20'
1201: -
K~ .ITS 40- lOG
8060 I
b, During descent, the heading, attitude, and airspeed are maintained with cyclic control. Rate of descent is
controlled with power and trim is
maintained with pedals. To level off from the descent, power is applied before reaching the desired altitude. This will check the downward movement in
sufficient time to p,event going beiow the desired altitude. The amount of lead depends on the weight of the aircraft and the rate of descent. The lead is
normally 10 percent of the rate of descent. For example, for a 500-foot-per-
1 . I .
\ \ , I!
_J\18 -
'4':'L---- ~
------t- ~
minute rate of descent, the lead will be approximately 50 feet.
,
c. When the proper altitude for starting
the level off is reached, power is applied to the predetermined power setting. Also, the vertical speed is checked to
determine if level flight has been established. The altimeter and airspeed indicator should also be checked at this
time to ensure flight is at the proper airspeed and altitude.
d. Common errors in straight descents include failure to-
"'f"1 -,"9'" '''.
(~, ,
?' :-8 AL: ~:~ . ~t::- '-7 ,~. .
:3;- ".þ S.
4,." . , -,
j, J I \ \
,...1.. ./ :'-,\'2\ 24 II.
< .:;,
lþ'~
:~ ;'- --:. s; '\~ ~-,,~
</ . .)
ìoC.. "" -
I 9 Ç..
"
I{ ,'..
: II 111\"' '.
\
-
------- ----
Figure 4-9. Straight descent
15 DECEMBER 1984 UPDATE. FM 1-240 51

(1) Maintain heading. (2) Establish desired rate of descent. (3) Maintain proper trim. (4) Level off at desired altitude. (5) Avoid overcontrolling pitch attitude.
4-19. Turns Determine the angle of bank necessary to produce a standard rate turn by the
true airspeed of the aircraft. The angle of bank required to achieve a standard rate
turn is to figure about 15 percent of TAS and this is applied to the attitude indicator. At an airspeed of 70 to 90 knots, the angle of bank of the standard rate turn is approximately 12 degrees to 15 degrees, as read from the attitude indicator. The number of degrees to be
turned governs the amount of bank to be
used. A change in heading of 20 degrees
or more requires a standard rate turn (3
degrees per second) and is shown as a
2-needle deflection on the 4-minute turn- and-slip indicator. For changes of less than 20 degrees, one-half standard rate is sufficient and is shown as a 1-needle deflection.
4-20. Level turns a. To enter a turn, a movement of the
cyclic control is applied in the direction of the desired turn (fig 4-10). The roll-in
should be smooth and steady and should
take approximately 4 to 6 seconds. The initial bank is started with reference to the attitude indicator. When the desired angle of bank and rate of turn have been attained, control pressure should be relaxed to prevent overbanking. To recover to straight-and-Ievel flight, coordinaterl movement of the cyclic control is applied in a direction opposite to the established turn. The rate of rollout should be the same as the rate of
roll-in. Straight-and-Ievel flight should be established with reference to all available
instruments. b. Common érrors in level turns
include failure 10- (1) Maintain constant rate of turn. (2) Maintain altitude. (3) Maintain airspeed. (4) Avoid varying rate of roll-in and
rollout.
52 15 DECEMBER 1964 UPDATE. FM 1-240

("'
140 "20
120 /?
10i:TS 40
80 60 /
ee
" ,
\ .~~
,"9 --8 AU
,
II,. ""..-
2;-, ,
. '~";
---7
//,þ "
\..
3::-
~ ~""
I I I'. \ '.
, , "
,
Figure 4-10. level turns
15 DECEMBER 1984 UPDATE. FM 1-240 53

"
t \ , .
y
4-21. Turns to headings
a. A turn to a heading (fig 4-11) consists of a level turn to a specific
heading as read from the heading
indicator and is performed at normal
cruise. Turns to specified headings
should be made in the shortest direction. The turn is entered and maintained as described in the level turn maneuver. Since the aircraft will continue to turn as long as the bank is held, the rollout must be started before reaching the desired heading. The amount of lead used to rollout on a desired heading should be equal to one-half the angle of bank. The rollout on a heading is performed in the
same manner as the rollout of the level
turn. When the heading for starting the
rollout is reached, cyclic control is
applied in the direction opposite the turn. b. Common errors in turns to headings
include failure to- (1) Use proper le>.o in rollout of the
turn. (2) Maintain altitude. (3) Recover lrom the turn with the
proper heading and altitude. (4) Avoid overcontrolling pitch and
bank attitudes.
4-22. Compass turns The procedure for making compass turns is explained in paragraph 4-11.
4-23. Steep turns
a. Any turn greater than standard rate is considered a steep turn; however, for
practice, a 4-minute turn needle should indicate a 3- to 3V2.needle width turn. A
steep turn is seldom necessary or advisable in instrument weather, but it is
a good test 01 the individual's ability to
react quickly and smoothly to changes in
aircraft attitude. The techniques of entry and recovery are the same as for any turn maneuver. Rate of turn and attitude
are maintained with cyclic control; airspeed and altitude are maintained with
power. b.. Common errors in steep turns
include failure to- (1) Maintain altitude. (2) Hold a constant rate of turn. (3) Maintain airspeed.
4-24. Timed turns' a. In a timed turn, the heading of the
aircraft is changed a definite number of
degrees with reference to the turn-and- slip indicator and the clock. For practice,
the timed turn is performed at normal
cruise with the heading and attitude indicators covered, To perform accurate timed turns, the needle of the turn-and- slip indicator must be calibrated in both
left and right turns. b. To calibrate the turn needle, the
approximate angle of bank for a standard rate turn is established with reference to
the attitude indicator. Necessary changes are made to produce an indication of a
y
\,\,'1101, 'f \" \~' N ~ ~.-:.
" '!I'\ G'
"'-.....
.-'Ii' \\ "," -=::--....:.~ 0 :3 ~"'-~ --:. d
" .....~ i;:)
:. ,-... :;..~ /,:- S ,'''''' h
"'I' 1\'\
54
Figure 4-11. Turns to headings
15 DECEMBER 1984 UPDATE. FM 1-240
standard rate turn with reference to the
turn needle. Unless oscillations of the turn needle are of equal distance on either side of the standard rate position
(average), errors will result in the rate of
turn. After establishing the rate of turn, the position of the second hand of the clock and the heading are noted. The rate of turn is maintained until a
predetermined time has elapsed-:-and the heading is noted again.
c. Exact timing is very important. If the turn needle is in calibration, a standard rate of turn for 10 seconds will produce a
change in heading of 30 degrees. Any deviation is corrected by changing the position 01 the turn needle to produce a
turn of 3 degrees per second. When the needle is properly càlibrated, the position is carefully noted and used during all standard rate turns.
d. Prior to starting the turn, the time necessary to turn to the new magnetic heading must be computed. To compute the time in seconds, the angular difference (shortest direction) between the present heading and the new heading is divided by three.
e. The techniques of entry and controi of the timed turn are the same as for the level turn. The position of the second hand of the clock must be noted when the turn is started (fig 4-12). For ease in
. timing, it is best to start the time when the second hand passes the 3-, 6-, 9-, or 12-0'ciock position. The standard rate 01
turn must be maintained until the predetermined time has elapsed, then the rollout is started. The rate of rollout is the same as the rate of roll-in. After straight-and-Ievei flight is established, the
'4\'IJ{~11tté" '
.w. I c::::=:::,
.i:1. " ~'H 'Ji~
Figure 4-12. Timed turns

compass should indicate the desired heading.
f. Common errors in timed turns include failure to- (1) Maintain a standard rate turn.
(2) Correctly compute the time to complete the tUrn.
(3) Use the sarne rate of roll-in and rollout of the turn.
(4) Maintain altitude.
4-25. Climbing turns a. A climbing turn (fig 4-13) is a
combination of a climb and a turn. For practice, a climbing turn consists of a
climb of 500 feet and a turn of 180 degrees in 60 seconds. In this maneuver, rate of climb and the rate of turn are both checked against time. The climbing turn is generally periormed at normal cruise and requires a very rapid cross- check for precise execution.
b. The climbing turn is started as the second hand of the clock passes the 3-, 6-,9-, or 12-0'clock position. As the power is applied to the predetermined setting, torque corrections should be made with pedals to maintain trim. The initial bank should be established with reference to the attitude indicator. To maintain the rate of turn, minor bank corrections are made with reference to the turn-and-slip indicator. During the climbing turn, the rate of turn and airspeed are maintained with cyclic control; the rate of climb, with power; and trim, with pedals. Power is used to adjust the rate of climb if deviation from desired airspeed is :1:5 knots. The :1:5 knots is used for minor pitch correction during climbs an~ descents. After 30 seconds, the aircraft will have turned approximately 90 degrees and climbed approximately 2SO 'feet. If the instruments indicate other than the de'sired readings, the rate of climb or turn .shoUld be. adjusted as necessary, A further checkOan be made at the expiration of 45 seconds. Adjustments in the rate of climb or turn should again be made if necessary. Normally, the recovery should be started as the second hand reaches the original starting position of 60 seconds. However, regardless of the time factor, a recovery should be made when the desired heading and altitude have been reached.
c. Common errors in climbing turns include failure to- (1) Detect a need for a change in rate of turn or climb.
(2) Apply proper use of power. (3) Apply proper use of pedals.
15 DECEMBER 1984 UPDATE. FM 1-240 55

0
,c20 /40
120t K' ,TS 40
lOG 60 .. 80
... , ~
.::. ..",,"TIlAIoI
56
~Q
...~. ~ .:/~~t;~:;:~:;:~~~~~~:})::}:}8:::::::::::;::::::;::;':;.:;'"
Figure 4-13. Climbing turns
15 DECEMBER 1984 UPDATE' FM 1-240

4-26. Descending turns a. A descending turn (fig 4-14) is a
combination of a descent and a turn. For practice, a descending turn consists of a
descent of 500 feet and a turn of 180 degrees in 60 seconds. In this maneuver, the rate of descent and the rate of turn are both checked against time. The descending turn is generally performed at normal cruise airspeed and requires a
very rapid cross-check for precise execution.
b. The descending turn is starfed as the second hand of the clock passes the 3-, 6-, 9-, or 12-0'clock position. As the power is reduced to the predetermined
setting, torque correction should be made with the pedals to maintain trim. The initial bank should be established with reference to the attitude indicator. To maintain the rate of turn, minor bank corrections are made with reference to the turn-and-slip indicator. During the descending turn, the rate of turn and airspeed are maintained with cyclic control; rate of descent, with power; and trim, with pedals. Power is used to adjust the rate of descent only if the desired airspeed is exceeded by +5 knots. The :!::5 knots is used for minor pitch
correction during climbs and descents. After 30 seconds. the aircraft will have turned approximately 90 degrees and descended approximately 250 feet. If the instruments indicate other than the desired readings, the rate of descent or turn should be adjusted as necessary. A .
further check can be made at the expiration of 45 seconds. Adjustments in
the rate of descent orturn should again be made if neGeSsary- Normally, the recovery should be .started as the second hand reaches the original starting
position of 60 seconds. However, regardless of .the jime factor, a recovery should be made when desired heading and altitude have been reached.
c. Gammon errors in descending turns Include failure to- (1) Detect a need for a change in rate of turn or rate of descent.
(2) Apply proper use of power. .
(3) Avoid improper use of pedals. (4) Recover from the turn with the
proper heading and altitude. (5) Avoid overcontrolling pilch and
bank attitudes.
4-27. Unusual attitudes and recoveries
a. Any maneuver not required for normal instrument flight is an unusual attitude and may be caused by turbulence, vertigo, Instrument faiiure, or careless cross-checking. Due to the inherent instability of the helicopter,
unusual attitudes can be extremely critical. As soon as an unusual attitude is
detected, recovery is made to level flight
as quickly as possible with minimum loss of altitude.
-b. The recovery from an unusual
attitude requires an immediate analysis of what the helicopter is doing and how to return it to normal flight as soon as possible with minimum altitude loss.
c. To recover from unusual attitude, the aviator corrects the pitch and bank attitude, adjusts power, and trims the aircralt as necessary. All components are changed almost simultaneously with little lead of one over the other. In other words if the aircraft is in a steep climbing
turn or descending turn, bank, pitch, and power are corrected simultaneously. The bank attitude is corrected with reference to the turn-and-slip indicator, or attitude indicator if available. Pitch attitude is
corrected with reference to the altimeter, airspeed indicator, vertical speed indicator, and the attitude indicator, if
available. Power is adjusted with reference to the power control instruments and the airspeed indicator.
d. The displacement of controls used in recoveries from unusual attitudes may be greater than those for normal flight.
Thus, care must be taken in making adjustments as straight-and-Ievel flight is
approached. The instruments must be observed closely to avoid overcontrolling.
e. Common errors in recoveries from unusual attitudes include failure to-
(1) Make power correction. (2) Correct pitch attitude. (3) Correct bank attitude. (4) Avoid overcontrolling pitch and
bank attitude. .
(5) Avoid excessive loss 01 altitude. (6) Avoid overcontrolling power. (7) Maintain aircraft in trim.
4-28. Autorotations An autorotation is a controlled descent without power in a helicopter. In the event of power failure or other ernergencies requiring autorotation, prompt corrective action must be taken to ensure positive control of the aircraft.
,
a. To enter autorotation, collective 'pitch is smoothly reduced to maintain safe rotor RPM, and pedals are trimmed to assure coordinated flight. The attitude of the aircraft should be level and the airspeed adjusted to the autorotative speed.
b. Practice instrument autorotations must be terminated with a power recovery. Power recoveries will be accomplished in accordance with the appropriate operator's manual and AR
95-1. c. Common errors in autorotations and
corrective actions include failure to- (1) Avoid skidding and slipping on
entry due to improper pedal trim. (2) Avoid improper airspeed or
airspeed variation due to improper pitch attitude.
(3) Maintain proper rotor RPM due to improper cross-check on RPM.
15 DECEMBER 1984 UPDATE. FM 1-240
4-29. Accelerations and decelerations An acceleration or a deceleration is a
coordinated maneuver that can be practiced during straight-and-Ievel flight.
a. To practice this maneuver, the airspeed should be at normal cruise. Power changes should be executed in
coordination with all available attitude instruments. Changes in attitude and trim control must be made throughout the maneuver to maintain altitude and desired heading.
b. To accelerate from normal cruise to high cruise, power is increased a small amount above that required to maintain high cruise and attitude is adjusted to maintain levei flight. Then as the desired airspeed is approached, power is
reduced to high cruise power setting, while attitude is adjusted to maintain level flight.
c. To decelerate from high cruise to low cruise, power is reduced a small amount below that required to maintain low cruise and attitude is adjusted as necessary to maintain level flight. Then as the desired airspeed is approached, power is increased to low cruise setting and attitude is adjusted to maintain appropriate altitude.
d. To accelerate from low cruise to normal cruise. power is increased a small amount above thet required to maintain normal cruise and attitude is adjusted to meintain appropriate altitude. Then as the desired airspeed is approached, power is reduced to normafcruise power setting and attitude is adjusted to
. maintain the desired 'altitude.
f;. Common errors'in'aocelerations and decelerations include JaJlure to- (1) Apply proper use of power.
(2) Avoid overcontroiling pitch attitude. (3) Maintain heading. (4) Maintain altitude. (5) Avoid overcontrolling power. (6) Use proper pedal adj,-!stment.
57

140 20
120 !)
= <,oij, 40
80 60
.W'. \
~, .::. ~.,,,f~
58
..:..:..:..:.,:..:..:.::.:..:.::.:.,:.::.:.::,:,:.:.:~':':":';':':':::::':':":':::'.':':.':.:.':.':, "..;...;."",
Figure 4-14. Descending turns
15 DECEMBER 1984 UPDATE' FM 1-240

Chapter 5
Coordination Maneuvers
5-1. General
The maneuvers described in this chapter
are practiced primarily to develop coordination in power, pitch attitude, and bank attitude control. These maneuvers wili also help increase speed in cross- checking instruments. Vertical Sand 8-1 is a series of climbs and descents, while Pattern A includes straight-and-Ievel flight, and Pattern B is more advanced.
5-2. VerticalS and 5-1
a. The vertical S (fig 5-1) consists of a
series of climbs and descents. Throughout the maneuver, constant airspeed and heading are maintained. All climbs and descents are made at a
constant rate as shown on the vertical speed indicator. The reversing of vertical direction is made at specified altitudes. The time element is eliminaled from the maneuver. The vertical S is entered as in
a constant rate climb or descent. (1) Pitch attitude is adjusted on the
attitude indicator during the climb or descent to control the vertical speed, but airspeed is controlled with power. The heading indicator and attitude indicator are references for bank control throughout the maneuver. The change from a climb to a descent requires the same amount of lead on altitude that is
used in a leveioff. (2) Power must be smoothly adjusted
to the approximate setting for desired descendino airspeed. At the same time, pitch attitude is adjusted to the approximate position for desired rate of descent. The same control technique is
used in changing from a descent to a
climb. The frequency of reversing the vertical direction depends on the type of aircraft.
b. The climbs and descents will be at the same indicated rate as the amount of altitude to be gained or lost. Normally in aircraft with a low rate-of-climb capability, the maneuver is accomplished by climbing 500 feet, descending 500 Jeet; climbing 400 feet, descending 400 feet; climbing 300 feet, descending 300 feet; and, climbing 200 feet, descending 200 feet. This completes the maneuver. High performance aircraft may accomplish the maneuver by changing altitudes of 1,000,
4500'
800, 600, and 400 feet, with corresponding rates of climb and descent. Trim control is especially Important because of the constant changes in attitude and power throughout the maneuver. The frequency of these changes requires a rapid cross- check for precise control of the aircraft.
c. The vertical 8-1 (fig 5-2) is a
combination of the vertical Sand standard rate turns of 360 degrees. Each turn is started in a climb and ends in a
descent. The direction of the ban k is
reversed after each descent.
d. Common errors to the verticai S
and 8-1 maneuvers include failure to- (1) Use the airspeed indicator properly
for pitch control when changing the vertical direction.
(2) Avoid overcontrol of pitch attitude when climbing and descending (indicated by excessive movement of the vertical speed indicator).
(3) Use the proper altitude lead when reversing the vertical direction.
(4) Correct sufficiently for torque when power is changed.
'*' DESCENDING ~URNSOO' DESCENDING TURN 400'
C'*. ,~;~~Gt TURN 400' ~
DESCENDING TURN 300'
OfSCEN~G TURN 200'
/'- + ~ '*' CliMBING
...
. ClIMBING \.
ÌÙR;:'-3òõ. / TURN 200' ~
*" Figure 5--2. Vertical 5-1
5-3, Pattern A
Patlern A (fig 5-3) is designed to give
practice in maintaining straight-and-Ievel flight and performing timed turns at definite time intervals. This combination of procedures will be used in the advanced phase of instrument training. It is an invaluable experience in planning, precision timing, maintaining orientation, holding, performing procedure turns, and making approaches.
B. Here are three prerequisites for successful performance of pattern A.
(1) Proficiency in performing timed turns without use of attitude and heading
indicators. Timing should begin when the second hand is on the 12-o'clock (preferable) or 6-0'clock position. All legs
are 2 minutes long except the first which is 1 minute. All turns are 3 degrees per second timed turns. Timing for all turns begins and ends on a cardinal point on the clock. Timing for each leg of the
patlern begins at the same moment that
pressure is applied on the controls to roll
the aircraft out of the preceding turn. This applies even though the aircraft is
still turning and is not on the desired heading.
(2) Understanding of the proper use of the magnetic compass and a wareness of its errors. The patlern may be started on any heading, but initial practice should be accomplished on cardinal headings for simplification. .
(3) Familiarity with the pattern and knowledge of the power settings for the different airspeeds used.
b. When the aircraft is in straight flight
and a few seconds have been allowed for the magnetic compass to stop oscillating, the compass heading is
noted. If the aircraft is not on the correct compass heading, a correction is made toward the desired heading before changing the airspeed. On headings of north and south, this correction must be a timed turn. However, in the vicinity of east and west, a shallow bank and turn directly to the heading is possible since there is no turning error on headings of east and west.
c. The airspeed should be immediately
changed if a correction of heading is not required. When the turn-and-slip indicator is the only bank instrument available, it
must be closely observed at all times.
4600'
4300'
.
figure 5-1 . Vertical S
15 DECEMBER 1984 UPDATE. FM 1-240
4400'
4200'
,6
59

CHANGE TO
SLOW CRUISE
"* / Ãcr
CHANGE TO SLOW CRUISE
Z
~ Z '" '"
~ ~
N
"D START .. NORMAL + I CRUISE
~
Figure 5-3. Pattern A
CHANGE 10
~ NORMAL S,RUISE
~~CHANGE 10 .c- r-.ORMAL
CRUISE
60 15 DECEMBER 1984 UPDATE. FM 1-240

The magnetic compass can be used only to determine the accuracy of the heading. The altimeter is used with the vertical speed indicator to maintain precise pitch control. A rapid and efficient cross-check is required during airspeed changes so that corrections can be immediately applied.
d. Common errors in the pattern A
maneuver include failure to (1) Control bank properly in turns. (2) Maintain heading and altitude. (3) Avoid the compass as a bank
instrument. .
(4) Avoid poor bank control during
changes in airspeed. (5) Make allowances for an incorrectly
calibrated turn needle during the timed
turns.
5-4. Pattern B
a. Pattern B (fig 5-4) is designed to give further practice in the procedures used during the advanced phase and to combine most of the maneuvers previously performed. It is essentially the
-+
z
~ z
~ '"
CHANGE TO NORMAL ~ CRUISE In'"
\ :t~
same maneuver as pattern A with the following exceptions:
(1) All available instruments are used. (2) Airspeed is changed during the
turns. (3) A before landing check is
completed on the fourth leg. (4) Descents at 500 feet per minute
are made during the maneuver. (5) The airspeed is maintained
following the final turn and a descent of 500 feet per minute is established, followed by a go-around after descending 1,000 feel.
b. The timing is consecutive since the time for each leg starts when the time for the previous turn has elapsed. This is
true regardless of the bank attitude of the aircraft. Timing is simplified if the pattern is always started when the second hand of the clock indicates the 12-o'clock position. The pattern may be memorized. However, using a card will give valuable practice in accomplishing advanced work. Planning should take place when flying straight and level on
BEFORE- LANDING CHECK
I EXECUTE
GO \ROUND -+
I ~ START
DESCENT 500 fpm
T z
~
\ START DESCENT 500fpm
LEVEL OFF AND MAINTAIN SLOW CRUISE
Flgur. 5-4. Paltern B
15 DECEMBER 1984 UPDATE. FM 1-240
the legs. The pattern can be started on any heading, but initial practice should be done on cardinal headings.
c. Common errors in the pattern 8
maneuver include failure to- (1) Control rate of turn. (2) Maintain heading and altitude. (3) Avoid attempting to use the
compass as a bank instrument. (4) Avoid poor bank control during
changes in airspeed.
61

Chapter 6
Air Navigation
6-1. General Air navigation is the art of directing an aircralt along a desired course and determining ils position along this course anytime. Such navigation may be pilotage. dead reckoning. or radio navigational aids. This navigation also includes those procedures which are used during instrument flight to direct aircralt to a safe ianding. The aviator must be able to plan a mission covering
any eventuality. Thus, the aviator must always try to think ahead of the aircralt and make decisions immediately based on the changes encountered.
Section I
Measuring the Earth in Space
6-2. Shape A perfect sphere is a body whose surface is at all points equidistant trom its center. Any straight line which passes from one side, through the center of the
sphere, to the opposite side is called the diameter of the sphere. Although the earth is actually a spheroid, slightly
flat1ened at the poles, for navigational
purposes it is considered a perfect
sphere.
6-3. Rotation
The diameter of the earth, around which
the spherical body rotates, is an
imaginary straight iine cailed the axis. The points formed by the intersection of
the axis with the earth's surface are the
North and South Poles. Any point on the
earth's surface, except the North and South Poies, completes one rotation
around the axis every 24 hours.
6-4. Revolution
As the earth rotates, it also revolves
around the sun in an elliptical path (fig
6-1). The earth completes one orbit
each year.
6-5. Inclination The axis of the earth is inclined approximately 23Y, degrees from the perpendicular to its plane of revolution. This inclination is such that the North Pole paints generally loward the North
Star (Polaris).
(~) ~ .
/'" - -
/'" ~ / / I \"
Figure 6-1. West to east rotation of the earth and Its revolution around the sun
62 15 DECEMBER 1984 UPDATE. FM 1-240

Section II Measuring Position on the Earth
~. Coordinates To identify a point on the surface of the earth, a universal system of expressing geographical position without reference to physical features is a necessity. Such a method, known as a coordinate or grid
system (fig 6-2), designates iocation or position and expresses angular
magnitude. This is performed by meridians and parallels which intersect at right angles, By reference to these lines, any point may be accurately located, This system of coordinates is formed by the intersecting of great and small
circles.
NORTH POLE
1050 22'W
-, ::=i{W C\:::: :;:;;::;.:'
\1;IliI11!,; ;~i ,i.~I; ~;; ";:;:;.;:::::;:;
." .
SP
Figure 6-2. Coordinate (grid) syslem
15 DECEMBER 1984 UPDATE. FM 1-240 63

6-7. Circles on a Sphere a. Great and small circles. The straight
cut of a plane through a sphere forms a
circie. If the cut passes through the center of the earth, the circle formed is a
great circle. This is the largest circle that can be cut from a sphere. Any other circle, regardless of size, is called a
small circle. The plane of a small circle does not pass through the center of the sphere and, therefore, will not divide the sphere in half (fig 6-3).
b. Arcs and their measurement. Arcs are segments of circles measured in
degrees, minutes, and seconds. A
degree (") is .1/360 of the circumference of a circle. Thus, if any circle is divided into 360 equal arcs, each arc is 1 degree in length, regardless of the size of the circle. A minute (') is 1/60 of 1 degree, a
second (") is 1/60 of 1 minute. c. Central angle. Straight lines drawn
from each end of an arc to the center of a circle form an angle at the center called the central angle. Angles, like
arcs, are measured in degrees, minutes, and seconds. The angle at the center of the circle contains the same number of degrees, minutes, and seconds as the arc which it subtends. Each line from the center of the circle to its periphery is a
radius,
CD e
THE EQUATOR is A
GREAT CIRCLE. THE GREENWiCH
MERIDIAN IS A
GREAT CIRCLE.
ANY CIRCLE THAT
CUTS THE EARTH IN HALF is A
GREAT CIRCLE.
Figure 6-3. Great and small circles
64 15 DECEMBER 1984 UPDATE. FM 1-240
<3>
A PARALLEL IS NOT A GREAT CIRCLE.

d. Angular and linear distances. The angular distance between any two points on a circle can be expressed in degrees, minutes, and seconds of arc. This distance is actually a measure of the central ang Ie and is independent of the size of the circle. The angular distance depends on that portion of the circle which separates the two points. For any given angle, the linear distance between two points on the circle (fig 6-4, an arc) varies with the size of the circle or with the length of the radius.
6-8. Reference circles on the earth The axis of the earth is the only distinctive, natural geometric line of the earth. The North and South Poles are distinct points on the earth and are used as central points for one set of reference circles known as parallels of latitude. The only great circle of this set of circles is the equator (fig 6-2).
6-9. Equator The equator is a great circle located halfway between the North and South Poles and serves as a reference line for all parallels of latitude (fig 6-2). Since the poles are 180 degrees apart, every point on the equator is 90 degrees from each pole. The plane of the equator Is at right angles to the earth's axis and
divides the earth into the Northern and Southern Hemispheres.
6-10. Parallels Any small circle whose plane is parallel with the plane of the equator is a parallel of latitude (fig 6-2). Every point on a
given parallel is equidistant from the equator, the poles, and any other parallel. The equator and all parallels are concentric around the polar axis. An infinite number of parallels may be drawn; however, only a few are shown on the globe. A parallel on the earth's sunace is designated by its angular measurement north or south of the equator. Point A (fig 6-2) is parallel 2904S' north of the equator.
6-11. Meridians A great circle passing through both poles is called meridian of longitude (fig 6-2). As with parallels, there may be an infinite number of meridians even though few are shown on the globe. The meridian passing through the observatory at Greenwich, England, has arbitrarily been selected as the reference or prime meridian. All other meridians are designated by their angular distance east or west of the prime meridian. Point A (fig 6-2) is on a meridian 10s022' west of the Greenwich meridian.
~ ~ ~C'! 00 ij\
10
~-.u 40
RADII
Figure 6-4. Angular and linear distances
1S DECEMBER 1984 UPDATE. FM 1-240
6-12. Latitude and longitude a. Latitude. The latitude of a point on
the surface of the earth is its angular
measurement north or south of the equator measured on the plane of the meridian passing through the point. Latitudes range from 0 degrees at the equator to 90 degrees north or south at the poles.
b. Longitude. The longitude of a paint is its angular measurement east or west of the prime (Greenwich) meridian, measured on the plane of the equator or of a parallel. Longitude ranges from 0
degrees at the prime meridian to 180 degrees at the meridian diametrically opposite the prime meridian. This is half- way around the world at the international date line.
c. Parallels. Naming the parallel and meridian which passes through a point is
essentially the same as giving its
coordinates. Each parallel of labtude is designated according to its angular
measurement north or south from the equator. Each meridian of longitude is designated according to its angular measurement east or west of the prime meridian. A meridian of longitude is a
line, but longitude is an angle; a parallel of latitude is a line, but latitude is an angle. In giving coordinates of a point, latitude is given first, followed by the longitude. For example, point A (fig 6-2) is positioned at latitude 2904S'N, longitude 1 OS022'W.
Section III Measuring Direction on the Earth
6-13. Points In air navigation, directions are indicated by cardinal points (north, east, south, west); intercardlnal points such as northeast, southeast, or southwest; or by degrees (fig 6-5).
6-14. Compass The compass rose (fig 6-5) divides the horizon (fig 6-{;) into 360 parts or degrees. Starting with north as 0 degrees and continuing clockwise through east, south, and west, directions are expressed In degrees measured from north (0 degrees). North may also be expressed as 360 degrees. East is 090 degrees and west is 270 degrees.
65

\ f.
N ~ <-
I-v ^' Iv
~ <:::J~
00
w 0900 E
1800
s If' ~
Figure 6-5. Compass rose
Figure 6-6. The horizon as a compass rose
66 15 DECEMBER 1984 UPDATE. FM 1-240
a. Figure 6-7 shows point B in a
direction of 045 degrees (northeast) and point C in a direction of 270 degrees (west) of aircraft A. Aircraft A is headed in a direction of 120 degrees. A line by itself does not indicate a single direction;
arrows or labels along the line are used to indicate the intended direction. The direction of C from A (270 degrees) is
not the same as the direction of C to A
(090 degrees), even though drawn as one line. The direction of a line is
measured from its point of origin and labeled by the angle the line forms with
an intersecting meridian. b. in figure 6-7, the direction from A is
measured from point A. If the meridians are drawn as parallel lines, the direction of a straight line may be measured at
any point along the line. In measuring the direction from C to A (A from C), measurement is made with reference to the mean meridian (DE) of points A and C. This is because the meridians in figure
6-7 are not parallel. They converge toward the north as do the meridians on most aerial navigation charts.
6-15. Course The direction which an aircraft is to fiy to
reach a given destination is the course to that destination. Therefore, the course from A to C (fig 6-7) is 270 degrees.
6-16. Rhumb line The rhumb line is a line of constant direction that crosses successive meridians at the same oblique angle (fig
6-8). Parallels of latitude, the equator, and meridians are often called rhumb lines even though they do not fully
conform with the definition. A true rhumb iine, if continued, will spiral toward the poles, never quite reaching either of
them. Such a spiral is called a
loxodromic curve (fig 6-8).

c
E 00
2700 090'
D 1800
Figure 6-7. Measurement 01 direction
lOXODROMIC CURVE (ABC DE)
GREA T CIRCLE SEGMENT
(BD)
RHUMB LINE (BCD)
Figure 6-8. Rhumb line, loxodromlc curve, and great circle
15 DECEMBER 1984 UPDATE oFM 1-240 67

6-17. Measurement a. Distance. The length of a line
joining two points is its distance. The most common unit for measuring distance in navigation is the mile. Since the word "mile" does not define an exact distance, it is important to specify the type of mile.
b. Statute mile. In the United States, 1
mile is defined by statute as being 1,760 yards or 5,280 feet. This is called a US statute mile. There are some differences in the legal definition in other countries. With the growth of cross-country flying and the development of better aviation
charts, the statute mile is rapidly becoming obsolete. It is still possible,
however, to encounter statute mile indications on some charts, plotters, and airspeed indicators.
c. Nautical mile. Military airmen use the nautical mile as a unit of distance. The nautical mile (6,076.1 feet) is
equivalent to 1 minute of latitude or approximately 1.15 statute miles. A
statute mile is approximately 0.87 nautical miles.
d. Comparative distances (fig 6-9).
NOTE: The only requirement that nautical miles be used in air navigation is
for filing flight plans. However, nautical miles are more convenient since distances on published aeronautical charts are shown in nautical miles. Also, wind speeds are reported in nautical miles per hour (knots) and most airspeed indicators are calibrated in nautical units. If navigational data contains mixed units,
all measurements are converted either to nautical miles or to statute miles.
e. Kilon,eter. The kilometer is used as a measure of distance in planning tactical instrument flights and other VFR flights. It is also used in International Civil Aviation Organization flight weather planning.
6-18. Great circle The shortest distance between two points on the surface of the earth lies along any minor arc of a great circle passing through both points. A minor arc of the great circle between two points is
more.nearly a straight line than the arc of any other circle which can be drawn between these points (fig 6,-8).
FEET NM SM KM
1 Kilometer (KM) 3,280.B
0.539 0.621
f.o
Chapter 7
Navigation Charts
7-1. General An air navigation chart is a diagram representing the earth's surface. It
shows elevation, cities and towns, highways and railroads, oceans, lakes and rivers, radio aids to navigation,
danger areas, and other useful features.
Section I
Chart Projections
7-2. Scale The scale on the charts is the ratio between the distance on a chart and the actual distance on the earth. A chart showing the entire surface of the earth is
drawn to small scale for convenient size. A chart covering a small area and much detail is drawn to a larger scale. However, the scale of a chart may be simple, such as "1 inch equals 30 miles." This means that a ground distance of 30 miles is 1 inch on the chart. On aeronautical charts, the scale is shown in representative fractions or graphic scales.
a. Representative fraction. A scale may be given as a representative fraction such as 1 :500,000 or 1/500,000. This
means that 1 unit on the chart represents 500,000 units of the same dimension on the èarth. For example, 1
inch on a chart may represent 500,000 inches on the earth or approximateiy 6.9 nautical miles or 8 statute miles.
b. Graphic scale. A graphic scale (fig 7-1) shows the distance on a chart labeled in terms of the actual distance it
represents on the earth. The distance between parallels of latitude is a
convenien1graphic scale since 1 degree of latitude always equals 60 nautical
miles. Meridians are often divided into
minutes of latitude with each division representing 1 nautical mile.
7-3. Distortion Distortion is misrepresentation of direction, shape, and relative size of the earth's surface when the earth's round shape is projected on a flat chart surface. A globe is the only means of representing the entire surface of the earth without distortion.
1 Statute Mile (SM) 5,280
0.87 1.0
1.609
1 Nautical Mile (NM) 6,076.1
1.0 1.15
1.852
Figure 6-9. Comparative distances
68 15 DECEMBER 1984 UPDATE' FM 1-240
a. Deveiopable surfaces. A
developable surface (fig 7-2) is a curved surface such as a plane, cylinder, or cone. It can be flattened without tearing, stretching, or wrinkling.
b. Nondeveiopable surfaces. The suriace of a sphere or spheroid is
nondevelopable because no part of it
can be laid out flat without distortion. This can be understood by attempting to flatten half of an orange peel. However, a small piece of orange peel, because it is nearly flat, can be flattened with little stretching or tearing. Likewise, a small
area of the earth's surface which is
nearly flat can be represented on a flat surface with little distortion (fig 7-2). Distortion becomes a serious problem in
charting large areas and can never be completely eliminated. It can, however, be controlled and systematized; a chart for a particular purpose can be drawn to
reduce the most distortion.
7-4. Characteristics Each chart has a different purpose and no one chart is best for every use. If a
perfect chart were possible, it would be a
true shape of all physical features and correct angular relationships. A perfect chart would also have correct relative proportions, true scale value for measuring distances, and great circles and rhumb lines represented as straight
lines. A few, but not all of the above properties are possible in one projection. A chart cannot be both equal in angles and equal in area. Desirable, but secondary chart properties are ease in
finding and plotting coordinates, ease in
joining two or more charts, finding cardinal directions parallel throughout the chart, and simplicity and ease in
construction.

KILOMETERS 10 IIII1 III 0 101 201 301 401 'NAUTICAL MilES 101 II I I 1 0 101 201
STATUTE MilES 101 I I I I I 0 101 201 301
Figure 7-1. Graphic scale
DEVELOPABLE
~, /~ , ,
/' ")...... ....
-1;. '" /....
.... -l...... i' '- /.,'\ ....
'(..... ). , -.. .,.. I, /\ .> r - \
I- '1
""'.J... ""'''''''' r- -" -( -\..... ). ..... \ -4 , -
-I...... I -,-,.. )- ....-, ... Þ"). ....\ - \ -.,.."'" ,
1---' ì-,-I-j-), ......~-\-\_,-" 1---t I ,-,- ì-......""'i.::-r::.. ",:-"",-~:",\-:.-,_-t-, \
,---f--f_f--,-l-l-I:;:':::, ""'~-;.'-....-,- 1_.1-....--1 r-,-+--.::~::::::: ....... ,...- =::.',-:' -,-"""-. I I I
L_..J_...l.'-'--"1_L__....:. ., ---1.--""-'-T----' I I I-t-.!.. -,-....-_t""-:"; ~~;::.. _1- +
-,- I
I L---1-""1 .l--S-t:-:. ':-...,-.2'-'-. T-r-- 4 J-.J.\'-t-'-1-....\--;..~~-;'.. "~~/:::'f ...,...;-,-4._1 I
..... -
\ .-i - \ -'(...'.... 11" / .... /,"'.J'" ',... -..... .J r"" -J , -.,.. '-'- "1: ..A,.
.ÞC
.... .,', "...' .... I Y -"'" )...
- \ " >': -,'" )I.
..... ... -c. ,...., ".... \ \
- \ ....
-
<" ~ '
,'1....'...( """"" ì.... J.. ""'/
..... ~
0( ''''''..." "<. " 1("'" .,. ,... I
Y"" ~.... )..'"'' v""....,, """", "7
\...-",...'\,/' 1(.,/,"'1,,'....1 \ ......
"( .....
"'<.
"'\ .
,.... ~.....,. I
", >,,, "', ,"'... .." ""..J ... ... I"" I \ /~, ~, 7 "( )' "
/
DEVELOPABLE
~iONDEVELO,'ABLE
Figure 7-2. Developable and nondevelopable surfaces
15 DECEMBER 1984 UPDATE. FM 1-240 6(

7-5. Graticule Exact coordinates of any point on the
earth may be found by astronomical means. With this reference to control points. the exact location of nearby features may be found by geographic
surveyor aerial photography.
a. Construction. A chart can be made by drawing the established geographical
features on a framework of meridans and parallels known as a gratlcule (fig 7-3). Once the graticule is drawn. features
may be plotted in their correct positions
with references to meridians and parallels.
b. Form and size. The form of the graticule determines the general characteristics and appearance of the
chart; its size determines the scale. Since meridians and parallels cannot be
shown on a plane surface exactly as
they would appear on a sphere, there is
no perfect method of constructing the graticule. For example, the meridians and parallels may be shown as straight lines,
curved lines, or both straight and curved
lines. They may be spaced in various
ways and' may intersect at various angles.
7-6. Projection Transferring the surface of a sphere or spheroid onto a flat surface is a
projection. The actual projection of a
graticule is accomplished by mathematical formulas.
a. Ciassifications. Projections are primarily classified by the developable surface (fig 7-2) where the spherical
surface is transferred. But there are classifications for projections centered on the equator (equatorial), pole (polar),
point or line between the equator and poles (oblique), or a tangent at a
meridional (transverse) line. Some cartographers drop the term "oblique" and use the term "transverse" for such
projections. Chart projections most
commonly used in air navigation are the Lambert conical, the Mercator cylindrical,
and the polar stereograph ie, all of which are conformal projections. Stereography is the art of representing forms of solid
bodies on plane surfaces. b. Purpose of charts. Charfs are
mostly used in navigation for chart reading, plotting and measuring. Charf reading is the location of one's position
by identification of landmarks para 9-1. Plotting refers to establishment of points
and lines on a chart. Measuring means measurement of direction and distance on a chart (para 10-1).
Figure 7-3. Appearance of the Lambert projection gratlcule
70 15 DECEMBER 1984 UPDATE' FM 1-240

7-7. Lambert conlormal projection The Lambert conformal projection (Lambert chart) is a conic projection using the cone lor a developable surface. All meridians are straight lines meeting at the apex of the cone. All parallels are concentric circles with the center as the .apex of the cone. Meridians and parallels intersect at right angles and the angle formed by any two fines is correctly represented (Iig 7-3).
a. Standard parallels. The cone intersects the sphere at two parallels (fig 7-4) known as standard parallels for the area to be represented. In general. for equal distribution of scale error, the standard parallels are chosen at one- sixth and five-sixths of the total represented meridian length.
LIMITS OF PROJECTION
STANDARD PARALLELS
STANDARD
Figure 7-4. Standard parallels on Lambsrl conformal chart
15 DECEMBER 1984 UPDATE -FM 1-240 71

b. Accuracy. Along the two standard parallels, areas are represented in true
scale. Between the standard parallels, the scale will be too small; beyond them, too large. For practical purposes, the scale can be considered constant for a
large scale chart of a small area (fig
7-5). Accuracy is greatest for charts of predominantly easl-west dimensions.
c. Conforma/ity. The Lambert projection is conformal because the scale is practically uniform in all
directions about any point. In addition,
the angles formed by parallels and meridians are correctly shown. Because of the scale uniformity, areas retain true
shape (fig 7-6). d. Great circle vs. straight line. Any
straight line on a Lambert conformal conic chart is neariy a great circle (fig
7-7). Using 2,572 statute miles between San Francisco and New York, a great
circie and a straight line connecting them on a Lambert chart are only gY2 miles
apart at mid-longitude. For shorter distances, the difference is negiigible.
, For all practical purposes, if a flight is
only a few hundred miies long, a straight
line may be considered a segment of a
I great circle.
e. Rhumb line on a Lambert chart. A
i rhumb line on a Lambert chart is a .
curved line that cuts all meridians at the same angle. The closer its direction is to east-west, the more a rhumb line departs from a straight line. Between distances of 1 00 to 200 miles in the latitude of the
I United States, a rhumb line departs little
, from a straight line. B.ut over long
I distances, the difference becomes large.
. Between San Francisco and New York I City, the length of a rhumb line differs
from a straight line by about 170 miles. An accurate rhumb line cannot be drawn on a Lambert chart, but it can be
: approximated by a series of short I straight lines.
f. Use. The constant scale and conformity of Lambert charts place them among the best charts for air navigation. They are suitable for navigation, using long-distance radio bearings, and they
are superior to Mercator charts (para
7-6) for problems involving long. distances and true dire'ctions. However,
I for plotting positions and measuring : rhumb line directions, the are inferior to
Mercator charts.
. 7-8. Mercator projection , The Mercator chart is a cylindrical..
projection with meridians appearing as equidistant and parallel straight lines. Parallels of iatitude are parallel to each other and perpendicular to the meridians.
a. Measurement. The distance
between parallels increases with an increase in latitude. Since the meridians
are parallel to each other, the east-west scale is increased with an increase in
latitude. Consequently, parallels must be
72
490 -101 Y2 %
450 -100% (SCALE EXACT)
390 - 99%0 %
STANDARD 330 -100% (SCALE EXACT)
- 102 Ih % 230
Figure 7-5. Variation of scale on typical Lambert projection
Figure 7-6. Areas and angles (Lambert)
Figure 7-7. Great circle vs. straight line on a Lambert chart
15 DECEMBER 1984 UPDATE. FM 1-240

placed in such a manner that the north- south scale increases proportionately. As a result, the scale at any point is constant in all directions. Since meridians and parallels intersect at right angles as on the earth, all angles are correctly shown. Every rhumb line appears as a straight line and every straight iine is constant in direction. The equator and the meridians are the only great circles which appear as straight lines; all other great cincles appear as curved lines (fig 7-a).
20
15
10
5
b. Use. The Mercator chart is used In air navigation only for long-range overwater flying. Its greatest advantage is that a rhumb line on the chart is a
straight line. Plotting is easier because of the rectangular graticule. On the other hand, long-range radio bearings cannot be plotted without special corrections. Because of the expanding scale of this chart, distances are difficuit to measure.
Figure 7-8. Mercator chart showing rhumb line vs great circle
15 DECEMBER 1964 UPDATE. FM 1-240 73

7-9. Polar stereographic projection The polar stereographic projection (fig
7-9) is based on a plane, tangent at the
pole, with the point of projection at the
opposite pole. Meridians are straight
lines converging at the pole. Parallels are
concentric circles with the pole as their
common center. For the world aeronautical chart series, the polar
stereographic chart is modified by using
a secant piane. A secant plane is a line intersecting a curve at two or more points (fig 7-10). This modification
makes the polar stereographic and
Lambert charts the same scale at 80- degrees latitude. The poiar stereographic
chart becomes true scale at 80"14' since
the secant plane intersects the earth's
surface at that latitude. The scale decreases as the pole is approached. The polar stereographic chart is the best
chart for navigation in polar regions.
a. Area of coverage. A polar
stereographic chart may include a whole
hemisphere. However, a chart used for
air navigation will not extend more than 20 degrees or 30 degrees from the pole.
b. Scale. Since the interval between parallels increases with distance from the pole, the north-south scale also
increases away from the pole. The east-
west scale increases in the same proportion, so that at any point the scale is constant in all directions. For all
practical purposes, the scale is constant within the limits of a navigational chart.
Figure 7-9. The polar stereographic projection
-figure 7-10. Modified polar ster-eographic projection
74 15 DECEMBER 1984 UPDATE -FM 1-240
c. Angles. All angles are correctly
shown since meridians appear as radii of
circles representing parallels. Meridians and parallels intersect at 90.degree angles on the chart.
d. Straight lines vs. rhumb lines vs.
great circles. Meridians, which are great
circles, appear as straight lines; hence, any great circle passing through the
center of the chart appears as a straight
line. Other great circles appear as slightly curved; however, the closer they are to center, the straighter they appear. Within the limits of a navigational chart, a
great circle is shown as a straight line
and rhumb lines appear as curved lines.
Section II Aeronautical Charts
7-10. Sectional aeronautical charts Radio navigation data is shown on many
types of aeronautical charts, including
the sectional and world aeronautical
charts. Sectional aeronautical charts are Lambert conformal charts published by the Nationai Ocean Survey, National Oceanic and Atmospheric Administration, United States Department of Commerce. The scale is 1 :500,000 (1 inch equals
approximately 6.9 nautical miles or about 8 statute miles). These charts are intended primarily for flights of short
duration using pilotage (visual flight), but
are suitabie for other forms of navigation.
a. Data. The large scale of the
sectional chart permits information to be included in great detail. A iisting of
aeronautical symbols and other useful
information is printed on the inside and outside borders of the chart. Both the
chart's effective and obsolete dates are printed on the front title page.
b. Terrain. The portrayal of terrain on the charts emphasizes land forms by reiief shading and also includes
contours, elevation tints, and a generous depiction of spot elevations. The maximum eievation figures (MEFs) shown in each 30-minute quadrangle represents hundreds and thousands of
feet above mean sea level. MEFs are the highest known terrain features within
the quadrangle. The MEF is based on available Information concerning terrain and obstructions such as trees, towers, or antennas. ..
c. Culture. Cultural features, such as
railroads and major roads, or sparsely
settled areas, such as dirt roads and paths may be shown. Cities and towns,
mines, lookout towers, and many other useful landmarks are indicated by symbols.
d. Aeronaufics. There are aeronautical
features such as airports, airways, and navigation radio facilities. Printed near each airport is information concerning that airport.
e. Charts. There are 37 charts, printed

back to back, covering the United States. Each is designated by name and series, New Orleans-Sectional Aeronautical Chart, for example. Each chart covers an area containing approximately 4 degrees of latitude and from 6 degrees to 8 degrees of longitude. Overlapping coverage on adjoining charts will be provided on the north and east sides to ease transition between charts. Charts are printed to the edge of the sheet, eliminating need for cutting and folding of border areas when matching data on adjacent charts is required.
f. Fold. Each chart will be folded to convenient dimensions of 5 x 10-5/16 inches for easy handling and stowage. The unique fold is designed to provide rapid switchover from front to back, ensuring availability of navigation ìnformation for continuous and uninterrupted flight.
7-11. World aeronautical charts World aeronautical charts (scale 1:1,000,000) are published by the National Ocean Survey, National Oceanic and Atmospheric Administration. There is no Department of Defense (000) requirement for civil editions of domestic world aeronautical charts. 000 requirements are being met by operational navigation charts.
7-12. Photomaps These maps are prepared by the Army Map Service, Corps of Engineers, and are used for air navigation over small areas. These maps may be constructed by using a single photograph or a mosaic of several Qhotomaps. They can also be printed on the reverse side of tactical maps. The scales are 1 :25,000, 1 :50,000, and 1:100,000. Meridians and parallels are indicated on the margin. Positions are located by reference to a system of horizontal and vertical grid lines.
7-13. Tactical pilotage charts These charts are produced to satisfy most 000 requirements for 1 :500,000- scale charts of the United States. They are used for detailed preflight planning, mission analysis, low-ta-medium altitude navigation, and low level, high speed navigation. Sectional charts of comparable coverage are produced by the National Ocean Survey (para 7-12) to satisfy civil needs. There is a US Army requirement to use the civil edition in low level visual pilotage.
7-14. Operational navigational charts These charts use the Lambert conformal projection with a scale of 1: 1 ,000,000. They are primarily designed for preflight planning and medium altitude enroute nevigation by dead reckoning, visual pilotage, and celestial, radar, and other electronic techniques. These charts replace world aeronautical charts in
. duplicate coverage areas. .
Chapter 8
Plotting and Measuring
8-1. General Plotting is establishing points and lines on a chart with reference to meridians and parallels. As used here, measuring refers to distance and direction on a
chart. The chart serves as a record of the flight and provides necessary information for a successful flight. Chart work is a fundamental navigational skill and must be accurate.
8-2. Pencils and erasers A soft lead pencil and soft eraser is
used. The pencil makes a tine black line which is easy to see and makes chart work more precise. The eraser wiil not damage the chart.
8-3. Dividers Dividers are used to step off distances on a chart. The dividers should have their pOints separated to the desired distance as determined from the proper chart scale (latitude or graphic) or plotter scale (fig B-1). The distance scale is thereby transferred to the working area of the chart and lines of desired length can be properly marked off. By reversing the process, unknown distances on the
chart can be spanned with the dividers and compared with the chart scale. While measurements are being made, the charts must be flat and smooth between the dividers. A wrinkle may cause an error of several miles.
6-4. Plotters A plotter is an instrument designed primarily to aid in drawing lines and measuring distances on an aeronautical chart. The plotter, air navigation, type PLU-2/C (fig B-2), is currently used by the Army. It is made of transparent plastic and has lines and scales printed in black. The rectangular part of the plotter has a straight edge for drawing lines and scales for measuring distances. The semicircular part of the plotter has three circular scales for measuring direction.
a. Rectangular part. All scales on the rectangular part are for measuring distances in nautical miles. The two upper scales read outward from the center in both directions. The three lower scales read from left to right. Scales of
...
'^"". ..,. .
, "'-"."""'"'\';"-"-":'""".,".DOI "''''::::'~~:~~'''~:.'
:::..'
Figure 8-1. Plotter, air navigation, type PLU-2/C
.--c
. figure "8-2. "Measuring course In the first and second quadrants 1.5 DECEMBER 1984 UPDATE. FM 1-240 75

1:500,000 (Sectional Aeronautical Charts), 1:1,000,000 (Operationai
Navigation Charts and World Aeronautical Charts), and 1 :2,000,000 (charts such as Jet Navigation Charts)
are provided. b. Circular scales. The circular scales
are calibrated in degrees. The outer
scale, reading from 0 degrees to 180
degrees (right to left), is for direction in
the first and second chart quadrants (north through east to south, fig 8-2). Since these directions are to the right on the chart, the outer scale has an arrow pointing to the right. The inner scale, reading from 180 degrees to 360
degrees (right to left), is for directions in
the third and fourth quadrants (fig 8-3). The center of curvature of both scales is
marked by a small hole.
c. The 60-degree center scale. This
scale is an aid when measuring courses
that are nearly north or south. The outer
scale reads from 150 degrees to 2f 0
degrees and the inner scale reads from 30 degrees to 330 degrees.
d. Measuremen Is. To measure a
course (fig 8-4), the center hoie is
placed on a meridian approximately midway along the plotted course line and the straight edge is parallei with the
course line. If the chart meridians do not
intersect the course line, the line is
extended and the straight edge of the
plotter Is moved parallel to the course
line. This is done untii the center hole -
iies over a meridian (fig 8-5). Figure 8-4 shows the method of reading direction.
The small arrows on the circular scale determine correct direction. The scale on which the small black arrow points in the
direction of the course shouid be noted. The scale should be read "up" from the
smaller values toward the larger values.
76
,
';;):;~ -::~:""':'~'\' ~ -'f'
--- ,\J.ð~":: ~fl~ \
~.~., ......-Ø'
I \ ~ - -"
:\ '
. - ..-
'. . .
~\" ~'- Figure 8-3. Measuring course In the third and fourth quadrants
~ r",s OF eo.~- SC4iE~
ì;
CE"'r OVEI>~kc~ 1>'01<.,
, , .
" o. I
',J'''''''''"", '''''.-'' 1\~6.r' ".". ,.,,~,,' '..1\''''('''''"\ 1100000 1 I'
~I 1'__jfll~..._It.
'IDOOOO
,I. I. 'I ()
":~IG"r
/ lift ~DGf '1>t c oUl/BE
, 1 ,I::JJ :lnlHll JJJdIJU' "'""HI IJlJ~UI )
DIRECTION Of + COURSE lirE
Figure 8-4. Measuring course
",~\l\O\,.,14
...., . ... ,.,," ."'\ \ .'....to. '''''''''' 10101
..
.. "~;..'~";'".!'.... "
Figure 8-5. Moving plotter to a meridian
15 DECEMBER 1984 UPDATE. FM 1-240

e. Course lines. To draw a given course line from a known point, the point-end of a pencil is placed at the known point. While the plotter is being pushed and pivoted against the pencil, the straight edge will remain on the known point while the center hole and scale reading are being aligned with a
meridian. The pencil will be in place for drawing the course line when the plotter has been properiy aligned with a
meridian (fig 8-6). In drawing a course line that is nearly north or south, 0 to 180 degrees, the center scale may be used (fig 8-7).
Chapter 9
Instruments Used for Dead Reckoning Navigation
9-1. General Dead reckoning is the method for determining position with a heading indicator and calculations based on speed, elapsed time, wind effect, and directional flow from a known position. The instruments used for dead reckoning navigation include the outside air temperature gage, airspeed indicator, altimeter, clock, and the magnetic compass system or slaved gyro system. These instruments provide information concerning direction, airspeed, altitude, and time and must be correctly interpreted for successful navigation. (General information is provided here, but for complete description, theory, and operation of these instruments, see chapter 2 nf the appropriate aircraft operator's manuals.)
9-2. Magnetic compass Certain magnetic compass errors must be corrected when the compass is used for navigation.
a. Applying compass corrections. The compass heading required to fly a given cour'~ is derived by correcting true heading for variation, drift, and deviation. When drift correction is applied to a true course (TC :!: DC = TH), it becomes a
true heading. A good method for recording application of variation and deviation is as follows:
(1) Write the equations shown below. TH is true heading; V, variation; MH, magnetic heading; D, deviation; and CH, compass heading. TH :!: V = MH MH :!: D = CH
(2) Place known information under each factor as shown below. TH :!: V = MH 188'12" E
MH:!:D=CH 5'W
, .
,.
" ,.1 I'~ ~-1",''''1 .::., 1""[''' . ',11 ... ", ~ '" . -" ,,\.. ", '''' , , ,,' "-,,, " \. ~;:~
. .':: .'" .' .
.
Figure 8-6. Drawing a course line from a known point
0 0
z; ,-
,
0
i1 ,
.
I l'
\ ,\; ,
-
.
.
,
! 1j ...J
no ~ ~
.
U ;
;a
'- -
.- ..
.
0
1. FROM A TO B, REAO INNER SPECIAL S(ALE (100) 2. FROM B TO A, READ OUTER SPECIAL SUlf (1900)
NOTE: REVERSING PLOTTER POSITION FROM EFT 0 IGHT SIDE OF THE (OU SE LINE DOES N T A F CT REA
Figure 8-7. Courses near 0 degrees or 180 degrees measured with a circular scale
15 DECEMBER 1984 UPDATE. FM 1-240 77

(3) Remember when making
calculations from a true heading to a
compass heading, easterly error is
subtracted; westerly error is added. Completing the problem, subtraction of
the 12 degrees E (variation) from the TH
(168 degrees) gives a MH of 158
degrees. This figure is placed under both
of the MHs. Adding the 5 degrees W
(deviation) to the MH (158 degrees) gives a CH of 161 degrees. The compass heading is placed under CH.
b. Reversing the equation. To find the
true heading when the compass heading
is known, the same equation is written as in (2) above. Placing the known information in the proper places, it would
appear as shown below. TH + V ~ MH
12'E MH + D = CH 5'W161'
(1) When changing from a compass heading to a true heading, easterly error is added; westerly error is subtracted. This is the reverse of changing from TH to CH.
(2) The 5 degrees W is subtracted
from the CH (161 degrees) and then this figure (156 degrees) is placed below the
MHs. (3) The 12 degrees E is added to the
MH (156 degrees) to obtain the TH (168
degrees) and this figure is then placed
below the TH.
9-3. Gyro heading indicator The gyro heading indicator is used for making turns to headings and for flying headings in order to maintain a course. It
is not a dir8ction-seeking instrument and
must be used in conjunction with the
magnetic compass. During flight, the
gyro heading indicator must be set to the
i same heading as the magnetic compass.
9-4. Slaved gyro system The slaved gyro system is a direction. seeking system and its heading indicator is used for. making turns to headings and for flying headings in order to maintain a
course.
9-5. Airspeed indicator For dead reckoning navigation, the true airspeed must be computed. To find the
true airspeed, corrections must be made to the indicated airspeed or calibrated
airspeed, if applicable, for temperature and pressure altitude. If no other method is available, the following rule of thumb
may be used. Two percent of the Indicated airspeed is added for each 1,000 feet of altitude to the indicated airspeed to arrive at an approximate true
airspeed. (True airspeed computation is
discussed in chap 11.)
9-6. Free air temperature gage During flight, the aviator will use the
temperature reading from the free air -
temperature (FAT) gage for computing
78
true airspeed. (Refer to chap 11 for this computation.)
9-7. Altimeter The altimeter is used to determine the
pressure altitude during flight. Pressure altitude is determined by setting 29.92 in
the Kollsman window of the altimeter. Pressure altitude is then used in
computing true airspeed. (Refer to chap 11 for this computation.)
9-8. Clock The clock is used in flight to determine the time required to fly a measured distance on the navigation chart. The distance is then divided by the time to determine the ground speed of the
aircraft.
Chapter 10 Wind and Its Effects
10-1. General Wind direction is the direction from which
the wind blows, such as wind from the
northwest is a northwest wind. Wind
speed is the rate of wind motion without regard to direction. In the United States, wind speed is usually expressed in knots. Wind velocity includes both direction and speed of the wind. For example, a west wind of 25 knots is recorded as wind veiocity 270 degrees/25 knots. Downwind is movement with the wind;
upwind is movement against the wind.
10-2. Wind
a. Wind effect. Moving air exerts a
force in the direction of its motion on any object within it. Objects that are free to
move in air will move in a downwind direction at the speed of the wind. An
aircraft will move with the wind as does the balloon shown in figure 10-1. In
addition to its forward movement through
the air, if an aircraft is flying in a 20-knot
wind, it will move 20 nautical miles
downwind in 1 hour. The path of an aircraft over the earth is determined by the motion of the aircraft through the air
and the motion of the air over the earth's
surface. Direction and movement of an aircraft through the air is governed by the direction where the nose is pointed
and by aircraft speed (fig 10-2).
15 DECEMBER 1984 UPDATE. FM 1-240

WIND
tt 20 MPH
I. L 20 MILES
MOVEMENT OF BALLOON
20 MILES
MOVEMENT OF AIR MASS
Figure 10-1. Wind effect on a free balloon in 1 hour
Figure 10-2. Wind effect on an aircraft
15 DECEMBER 1984 UPDATE. FM 1-240 79

b, Wind drift, The sideward displacement of the aircraft caused by
the wind is cailed drift (fig 10-3), Drift is
measured by the angle between the heading (direction in which the nose is
pointed) and the track (actual path of the
aircraft over the earth),
:J6üO
M
WIND. 2700 20 r<T
___!'~~E~D~''.':__@) I
j j
jð DRIFT
4 /I-..Q::'"
IvGI.( /
'" 2 Õ ~ "
I
cD j
I
I I
CD x
Figure 10-3, Drift
NOTE: Track must not be confused with
course, wr;ch is the plotted course or intended track,
(1) Example of drift, As shown in
figure 10-3, an aircraft departs point X
on a heading of 360 degrees and flies
for 1 hour in a wind of 270 degrees/20 knots, The aircraft is headed toward point M directly north of X, Its heading is
represented by line XM, Under no-wind conditions, the aircraft would be.at point M at the end of 1 hour, However, in this
example there is a wind of 20 knots and the aircraft moves with it. At the end of 1
hour, the aircraft is at point N, 20 nautical miles downwind from M, The line XM is the intended path of the aircraft through the air, the line MN shows the
motion of the body of air, and the line XN is the actual path of the aircraft over the earth,
(2) Drift and ground speed change with heading change, A given wind
causes a different drift on each aircraft heading and affects the distance
traveled over the ground in a given time, With a given wind, the ground speed
varies with each different aircraft
heading, (3) Effects of a given wind on track
and ground speed with different aircraft heading, Figure 10-4 iilustrates how a
80
wind of 270 degrees/20 knots affects the ground speed and track of an aircraft flying on headings of 360, 090, 180, and 270 de9rees, On each different heading,
the aircraft flies from point X tor 1 hour
at a constant true airspeed (TAS), The length of each dash line represents the
distance the aircraft travels through the
body of air. This is the same distance it
would have traveled over the ground in 1
hour had there been no wind, Each solid
line represents the track of the aircraft.
The length of each solid line represents
ground speed, Differences between the
length and direction of the solid and
dash lines represent the wind effect on track and ground speed,
(4) Head wind, tail wind, and crosswind, As shown in figure 10-4, the
wind of 270 degrees/20 knots causes right drift on a heading of 360 degrees; on a heading of 180 degrees, it causes
left drift, On the heading of 90 degrees, the aircraft, aided by a tail wind, travels
farther in 1 hour than it would with no
wind; thus, its ground speed is increased by the wind, On the heading of 270
degrees, the head wind reduces the ground speed, On a heading of 360 degrees and 180 degrees, the ground
speed effect is usually complicated by the drift correction applied,
10-3, Correction Drift correction must be applied to a
course to determine the heading, The amount of drift correction must be just
enough to compensate for the amount of
drift on a given heading, The drift
correction angle (DCA), sometimes called crab angle, is equal to, but in the
opposite direction from, the drift angle, If
an aviator attempts to fly to a destination
due north of a point of departure on a
heading of 360 degrees and a west wind is blowing, the arrival is somewhere east
of the destination because of right drift
(fig 10-5, A), To correct for right drift so that the aircraft will remain on course and arrive at the desired destination, the
nose will have to be pointed to the left of
the course, or upwind (fig 10-5, B),
10-4. Points to remember When dealing with the wind and its
effects, remember the following points:
a, Wind from the right causes drift to
the left.
b, Wind from the left causes drift to the right.
c, If heading is greater than track or
course, drift is to the left.
d, If heading is less than track or
course, drift is to the right. .
e, If drift is to the right, drift correction is to the left.
t, If drift is to the left, drift correction is
to the right.
g, Drift is always downwind, h, Drift correction is always upwind,
15 DECEMBER 1984 UPDATE. FM 1-240
10-5. Problems
a. Problem 1, (1) Problem, Heading 160 degrees,
track 170 degrees, Is drift right or left? Is
drift correction to be made to right or left?
(2) Solution, Since heading is less
than track, drift is right; drift correction is
left.
b, Problem 2, (1) Problem. Heading 350 degrees,
drift 4 degrees left, What is the track?
What is the drift correction? (2) Solution. Since drift is left, heading
must be greater than track, Track equals
346 degrees (350 degrees minus 4
degrees), Drift correction will be 4
degrees right.
c, Problem 3, (1) Problem. Track 005 degrees, drift
10 degrees right. What is the heading?
What is the drift correction? (2) Solution. Since drift is right,
heading is less than track, Heading
equals 355 degrees (005 degrees minus
10 degrees or 365 degrees minus 10 degrees), Drift correction wiil be 10 degrees left.
10-6. Ground speed Ground speed (GS) is the result of wind velocity and the forward motion of the
aircraft through the air. In calm air, the speed of the aircraft over the ground is
equal to its TAS, If the aircraft is moving
against the wind (head wind), the ground
speed is equal to the difference between the TAS and the wind speed, If the aircraft is moving with the wind (tail wind), the ground speed is equal to the
sum of the TAS and the wind speed, if
the aircraft is moving at an angle to the
wind, the ground speed may be any speed between the extremes of the
ground speeds determined by head winds and tail winds, Those ground speeds that are less than the TAS are the result of hindering winds; those greater than the TAS are the result of helping winds, Wind directions that are' approximately 90 degrees to the longitudinal axis of the aircraft (abeam winds) have a minimum effect on ground
speed, Winds may be classified as head
winds (hindering winds), tail winds (helping winds), and crosswinds (quartering head winds or quartering tail
winds), Average ground speed is
calculated by dividing the total distance
flown by the total time (in hours) required
for the flight. Airspeed factors to be
considered in computing average ground
speed include- a, Climbing airspeed is usuaily less
than cruising airspeed,
b, Flying a constant true airspeed on the same outbound and return course with a constant wind velocity does not
produce an average ground speed equal

8
. WIND
CD 360'
: RIGHT
I DRIFT I I I
HEADWIND I TAILWIND NO DRIFT ~ NO DRIFT
2700 ------- I - - - - - 9{)'----- I
I I
I I I I
I I J
1800 G) -------- - DISTANCE TRAVELED
T RAe K
(~/
Figure 1~. Effects of a given wind on track and ground speed with aircraft flying on different headings
DESIRED DESTINATION
. WINO
.
<( , , , , , , . . , , , , , , , , , ,
~ & , ,
"', Z' õ~ <M w, r, , ,
, , , ,
&
. ,
"'I ,!:, ~~ w, r. . ,
ACTUAL ARRIVAL POINT
,
"': z' ~~ w, r, , ,
, ,
w
U) <r :0 0 U
. , , . , ,
: , . , ,
i : I
$-~_ß 0
" "<
<"",'I-", \S'~""1<>
'1-"" "1- G'
~ ,
,
, ,
,
'''''''''
" "
"
. WIND
.
CORRECTED DRIFT
Figure 10-5. Drift and drift correction
15 DECEMBER 1984 UPDATE. FM 1-240
ACTUAL ARRIVAL POINT AT DESIRED DESTINATION
< <""''''~~
/-..yð;;
"~G' ~~
((f',j'1-(<:: U';.,"Vo
'1-"" "1- G'
~ ,
, ,
~ w
U) <r ,
5 Ii! u
0
81

to the average TAS. For example, Figure
10-6 illustrates an aircraft flying a
constant TAS (100 knots) for 1 hour
against a 30-knot head wind and
returning to the starting point.
(1) The aircraft will cover 70 nautical
miles in 1 hour on the outbound course (fig 10-6, A); ground speed is 70 knots (100 knots TAS-30 knot wind velocity).
(2) On the return course (fig 10-6, B).
the aircraft will have a ground speed of
130 knots (100 TAS + 30 wind velocity)
and will cover the 70-nautical-mile
distance in 32 minutes (0.63 hour).
(3) The total distance (140 nautical
miles) divided by the total flying time (1.53 hours) equals an average ground
speed of 91 knots.
j X ~
0
oil(
j X (,
@
82
Chapter 11
The Dead Reckoning Computer Section I
Slide Rule Face
11-1. General A dead reckoning (DR) computer is a
combination of two devices. One is a
specially designed instrument for solving
wind triangles and the other is a circular
slide rule for solving mathematical problems. Many different types of DR
navigational computers exist, but
construction and design features of
major types are very similar. To illustrate,
the standard US Army DR computer,
type CPU-26A/P, is used throughout this
chapter.
11-2. Slide rule The slide rule side of the CPU-26A1P
computer consists of two circular scales.
The outer scale is stationary and is
called the miles scale. The inner scale
rotates and is called the minutes scale.
a. Values. The numbers on the computer scale represent multiples of 10
of the values shown. For example, the
number 24 on either scale (outer or
TAS 100KT ) ~ 30 KT
4 70N M ) y
OUTBOUND COURSE
TIME ~ 1 HR; THEREFORE. GS " 70 KT
TAS 100KT ."., ~30KT
r 10NM ) y
INBOUND COURSE
GS = 130 KT; THEREFORE. TIME = 32 MIN
Figure 10-6. Average ground speed
16 DECEMBER 1984 UPDATE. FM 1-240

inner) may represent 0.24, 2.4, 24, 240, or 2,400. On the inner scale, minutes may be converted to hours by reference to the adjacent hour scale. For example, 4 hours is found in figure 11-1 adjacent to 24 meaning 240 minutes. Relative values should be kepI in mind when reading the computer. For example, the numbers 21 and 22 on either scale are separated by five spaces, each space
. representing two units. The second division past 21 will be read as 21.4 or 2,140. Spacing of these divisions should be studied because the breakdown of dividing lines may be into units of 1, 2, 5, or 10.
b. Indexes. Three of the indexes on the outer stationary scale are used for converting statute miles (SM), nautical miles (NM), and kilometers (KM). These indexes are appropriately labeled "NAUT" at 66, "STAT" at 76, and "KM" at 122. On the inner rotating scale are two rate indexes. The large black arrow at 60 (speed index or 60 index) is the hour index. The small arrow at 36 is the second (SEC) index (3,600 seconds equal 1 hour). The STAT index on the inner scale is used in mileage
conversion. Each scale has a 10 index used as a reference mark for multiplication and division. The application of these scales in solving computer problems is illustrated in the specific problems in paragraph 11-3.
11-3. Distance conversion a. Problems and solutions. (1) Problem. How many statute miles
equal 90 nautical miles? How many kilometers equal 90 nautical miles?
(2) Solution. Refer to figure 11-2 and solve as follows:
(a) Sel 90 (inner scale) under NAUT index (outer scale).
(b) Read 104 SM (inner scale) under STAT index (outer scale).
(c) Read 166 under KM index (166 kilometers).
1:-:-
í:-: "- !"'" .
(~:- -~:
.
Figure 11-2. Distance conversion
b. Addibonal guidance. When several distance conversion problems are to be solved between statute and nautical miles, set the STAT index on the inner scale under the NAUT index of the outer scale. Then read any ratio around the entire slide rule. For example, 13 statute miles is 11.3 nautical miles, 13 nautical miles is 15 statute miles (fig 11~3).
10 INDEXES (REFERENCE MARKS)
STATUTE INDEX
KILOMETER INDEX NAUTICAL
INDEX
SPEED INDEX
MINUTES SCALE
Figure 11-1. Slide rule face 15 DECEMBER 1984 UPDATE. FM 1-240 83

.
; : \ I, ','" ~ \.i,:,).'\~'
". ,~
Figure 11-3. Converting several distances simultaneously
11-4. Simple proportion The slide rule face of the computer is so constructe.d that any relationship
between two numbers will hold true for all other numbers on the two scales. Numbers are on both the stationary and movable scales. For example, if the two 10 indexes are placed opposite each other (fig 11-4), all other numbers
around the entire circle will be Identical.
If 20 on the inner scale is placed
opposite the 10 index on the outer scale, all numbers on the inner scale will be double those on the outer scale. If 12 on the outer scale is placed opposite 16 on the inner scale. all numbers will be in a 3
to 4 (3/4) relationship. This scale design
enables the aviator to find the fourth
term of any mathematical proportion
when three of the values are known.
Figure 11-4. Numerical relationship
between the two scales
11-5. Time-distance Time-distance problems are worked on the inner minutes scale and the outer miles scale.
s. Problem. If 50 minutes are required
to travel 120 nautical miles, how many
64
.
minutes are required to travel 66 nautical
miles at the same rate?
b. Solution. Refer to figure 11-5 and
solve as follows: (1) Set 50 (inner scale) under 120
(outer scale). (2) Under B6 (outer scale), read 36
minutes required (inner scale).
"
Figure 11-5. Time and distance
11-6. Ground speed Ground speed equals distance divided by
time.
s. Problem. What is the ground speed
if it takes 35 minu1es to fly 80 nautical
miles?
b. Solution. Refer to figure 11-6 and
solve as follows: .
(1) Set 35 (inner scale) under 80 (outer scale).
(2) Over 60 index read 137 knots
(outer scale).
.
Figure 11-6. Determining ground speed
11-7. Time required Time equals distance divided by ground
speed. s. Probiem. How much time is required
to fly 333 nautical miles at a ground speed of 174 knots?
b, Solution. Refer to figure 11-7 and
solve as íolíows: .. - . .a
15 DECEMBER 19B4 UPDATE. FM 1-240
(1) Set 60 index under 174 (outer
scale). (2) Under 333 (outer scale) read 115
minutes (inner scale) or 1 + 55 (hours
scale).
.
Figure 11-7. Determining time
11-8. Distance determination Distance equals ground speed multiplied
by time.
a. Problem. How far does an aircraft
travel in 2 hours and 15 minutes at a
ground speed of 13B knots?
b. Solution. Refer to figure 11-8 and solve as follows:
(1) Set 60 index under 138 (outer
scale). (2) Over 135 (inner scale) or 2 + 15
(hours scale), read 310 NM (outer scale).
.
.
Figure 11-8. Determining distance
11-9. Use of the 36 Index The number 36 on the inner scale is
used in solving rate-time-distance .
problems in instrument flight. This is
when time must be calculated in
seconds and minutes instead of minutes
and hours. For example, determine the
time required to fly from the final
approach fix (FAF) to the missed approach point (MAP) on an instrument approach. ...
.

a. Formula. Problems where seconds must be used as a unit ot time may be solved by the following formula:
GS Distance
36 Seconds
NOTE: GS is the ground speed, 36 is the number of seconds in 1 hour (3,600), distance is the number or decimal parts of miles to be flown, and seconds is the time required to fly that distance.
b. Problems involving less than 60 seconds.
(1) Problem. What is the time required from the middle marker (MM) to the point of touchdown (PT) if the ground speed is 100 knots and the distance between these points is 0.5 of a nautical mile?
(2) Solution. Refer to figure 11-9 and solve as follows:
(a) Set 36 (inner scale) under 100 (10 on the outer scale).
(b) Under 50 (0.5 NM) (outer scale), read 18 seconds (inner scale).
Figure 11-9. Rate-Ume-dlstance problems using minutes
c. Problems Involving More Than 60 Seconds.
(1) Problem. What is the time required to fly from the outer marker (OM) to the middle marker If the ground speed is 95 knots and the distance between the two points is 5 nautical miles?
(2) Solution. Refer to figure 11-1 0 and solve as follows:
(a) Set 36 (inner scale) under 95 (outer scale).
(b) Under 50 (5 NM) (outer scale), read 19 (190 seconds) or 3 minutes and 10 seconds (inner scale).
NOTE: When using the minutes scale as a seconds scale, the hours scale becomes a minutes scale.
Figure t 1-10. Rate-Ume-dlslance problems using seconds
11-10. Gallons and pounds conversion Set the 60 index under rate gallons per hour (GPH) and read gallons used over the given time. To convert gallons to pounds or pounds to gallons, the following conversion factors are used in simple proportion (para 11-4): .
Gasoline: 6.0:1.
JP-4 fuel: 6.5:1.
.
11-11. Rate of fuel consumption a. Gallons. Rate of fuel consumption
equals gallons of fuel consumed divided by time.
(1) Problem. What is the rate of fuel consumption ij 30 gallons of fuel are consumed in 111 minutes (1 hour and 51 minutes)?
(2) Solution. Refer to figure 11-11 and soive as follows:
.
Figure 11-11. Determining rate of fuel consumption
15 DECEMBER 1984 UPDATE. FM 1-240
(a) Set 111 (inner scale) under 30 (outer scale). In this case, the outer scale is used to represent gallons.
(b) Over 60 index, read 16.2 GPH (outer scale).
(3) Problem. Fo~; C3110ns of fuel have been consumed in 135 minutes (2 hours and 15 minutes) flying time. How much longer can the aircrafl continue flying if 25 gallons of available fuel (usable fuel not including reserve) remain and the rate of consumption remains unchanged?
(4) Solution. Refer to figure 11-12 and solve as follows:
(a) Set 135 (inner scale) under 40 (outer scale).
(b) Under 25 (outer scale), read 84.5 minutes fuel remaining (inner scale).
b. Pounds. Rate of fuel consumption equals pounds of fuel consumed divided by time.
(1) Problem. What is the rate of fuel consumption if 300 pounds of fuel are consumed in 111 minutes (1 hour and 51 minutes)?
(2) Solution. Refer to figure 11-11 and solve as follows:
(a) Set 111 (inner scale) under 300 (outer scale). In this case, the outer scale is used to represent pounds.
(b) Over 60 index, read 162 pounds (outer scale).
Figure 11-12. Fuel consumption 11-12. Maximum range Aircraft perlormance data charts used in determining maximum flying range sometimes base fuel consumption rates on nautical miles' flown per pound or gallon of fuel consumed. This conversion is accomplished as follows:
a. Formula. The relationship between nautical miles per pound and pounds per hour is expressed as shown below. Nautical miles per pound (or gallon) TAS (miles flown per hour) , pound (or gallon)
Pounds (or gallons) per hour b. Problem. The maximum flying range
based on fuel consumption is indicated on the aircraft perlormance chart as 0.231 nauticai miie per pound. At TAS of
85

196 knots, what is the aircraft fuel
consumption rate in pounds per hour?
c. Solution. Refer to figure 11-13 and
solve as foilows: (1) Set 10 inde. (1 pound inner scale)
under 0.231 (outer scale). (2) Under TAS (196 knots) (outer
scale), read 850 pounds per hour (inner
scale).
Figure 11-13. Converting nautical miles
per pound 10 pounds per hour
11-13. Airspeed computations The window marked "FOR AIRSPEED
AND DENSITY ALTITUDE COMPUTATIONS" provides a means for
computing TAS when CAS, temperature,
and altitude are known or vice versa. To change from one to the other, it is
necessary to correct for altitude and temperature differences existing from
those that "e standard at sea level. FAT
is read from a free air thermometer and the pressure altitude is found by setting
the altimeter at 29.92 inches of mercury
and reading the altimeter directly.
a. Problem. The calibrated airspeed is
125 knots, FAT is -15 degrees Celsius,
and the pressure altitude is 8,000 feet.
What is the TAS?
b. Solution. Refer to figure 11-14 and
solve as follows: (1) Set 8,000 under -15 degrees
Celsius in the airspeed computation
window. (2) Over 125 (Inner scale), read TAS
137 knots (outer scale).
NOTE: To solve CAS when TAS is
known. locate TAS on outer scale and
read answer (CAS) in inner scale.
86
.
Figure 11-14. Airspeed computation
11-14. Density altitude Density altitude is that altitude in the
standard atmosphere at which a given air
density exists. Because of variations of
temperature and pressure, the density of
the air on a given day at any given
pressure altitude may be that density
found several thousand feet higher or
lower in the standard atmosphere. Such
conditions can be critical in aircraft
operations, especially in the operation of
helicopters. To compute density altitude,
movable scales are rotated on the
computer so that the FAT is set above the pressure altitude in the window
labeled "FOR AIRSPEED AND DENSITY ALTITUDE COMPUTATIONS." When set
in this manner, the density altitude is
read above the pointer in the window
labeled "DENSITY ALTITUDE." Using
the same flight condition as in paragraph
11-13, density altitude is read as 6,200
feet (fig 11-14). Accurate results can only be obtained by using pressure
altitude. Pressure altitude can be read
directly from the altimeter when the
altimeter setting is 29.92.
11-15. Altitude computations The window marked "FOR ALTITUDE COMPUTATIONS" provides a means for
computing corrected altitude by applying
any variations from standard temperature
to indicated or calibrated altitude.
a. Problem. The pressure altitude is
9,000 feet, indicated altitude is 9,100
feet, and the FAT is -15 degrees Celsius.
What is the corrected altitude?
b. Solution. Refer to figure 11-15 and
solve as follows: (1) Set 9,000 under -15 degrees
Celsius in the altitude computation
window. (2) Above 9,100 feet indicated altitude
(inner scale), read 6,700 feet corrected altitude (outer scale).
15 DECEMBER 1984 UPDATE' FM 1-240
Figure 11-15. Altitude computation
11-16. Off-course correction (rule of 60)
An aircraft headed 1 degree off course will be approximately 1 mile off course
for each 60 miles flown. This is the rule
of 60. Inversely, for each mile an aircraft
is off course after each 60 miles of flight,
1 degree of correction will be required to
parallel the intended course. Applied to
other distances (multiples of 60), such as
1.5 miles off course in 90 miles, 2 miles
off course in 120 miles, or 2.5 miles off
course in 150 miles, a correction of 1
degree will be required to parallel the
intended course. To converge at
destination, an extra correction must be
made based on the same rule of 60.
a. Formulas. The degrees correction required to converge at destination is
determined by adding the results of the following formulas on the computer.
(1) Correction to parallel course.
MILES OFF COURSE
MILES FLOWN
DEGREES CORRECTION
60
(2) Additional correction to converge.
MILES OFF COURSE
MILES TO FLY
DEGREES CORRECTION
60
b. Problem. An aircraft is 10 nautical
miles to the left of course when 150
nautical miles from departure point A.
How many degrees correction are required to parallel course? If 80 nautical
miles remain to destination S, how many additional degrees are required to converge? In what direction is the
correction applied?
c. Solution. Refer to figures 11-16 and
11-17 and solve as follows:
(1) Set 150 (inner scale) under 10
(outer scale) (fig 11-16).

.
Figure 11-16. Off-course correction to parallel
(2) Over 60 index, read 4 degrees (correction required to parallel).
(3) Set 80 (inner scale) under 10 (outer scale) (fig 11-17).
(4) Over 60 index, read 7.5 degrees to converge.
(5) 4 degrees + 7.5 degrees = 11.5 degrees, total correction to converge at destination. Since the aircraft is off course to the left, correction will be made to the right or added to the original heading. For example, if the original heading were 090 degrees, the new heading is 101.5 degrees or 102 degrees to the nearest degree.
Figure 11-17. Off--course correction to converge
11-17. Drift correction This scale in the drift correction window of the computer is a refinement of the rule of 60 (para 11-16). Actually an arc of 1 mile subtends an angle of 1 degree at a distance of 57.3 miles rather than 60 miles. The drift correction window scale incorporates this relationship correctly.
a. Problem. After traveling 400 miles, the aircraft is 30 miles off course- (1) What drift correction angle is
necessary to parallel the desired course? (2) What drift correction angle is
necessary to intercept the desired course in 150 additional miles?
b. Solution. Refer to figure 11-18 and solve as follows:
(1) Set 30 (outer scale) over 400 (inner scale) and read 4.3 degrees
(correction angle to parallel the desired course) in the drift correction window.
Figure 11-18. Drift correctIon computation to parallel
NOTE: The drift correction window, together with the D
2 -D, data and the latitude scale on the face of the computer, is also used in pressure pattern flying. (Since the Army does not use this navigation technique, it is not explained in this manuaL)
(2) To find the angle to intercept the desired course, place 30 (outer scale) over the course miles to the interception point, 150 (inner scale), and read 11.3 degrees (the additional angie to intercept in the drift correction window) (fig 11-19). Total correction angle to intercept the desired course is 15.6 degrees (4.3 + 11.3).
'e
Figure 11-19. Drift correction computation to converge
15 DECEMBER 1984 UPDATE' FM 1-240
11-18. Radius of action (fixed base) Radius of action to the same base refers to the maximum distance an aircraft can be flown on a given course and still be able to return to the starting point within a given time. The amount of available fuel (not including reserve fuel) is usually the factor determining time.
a. Problem. The ground speed on the outbound leg of the flight is 160 knots; on the return leg, 130 knots. Available fuel permits 4.5 hours (270 minutes) total time for the flight. How many minutes will be available for the outbound leg of the flight? How many minutes will be required for the return leg of the flight? What is the radius of action?
b. Solution. Refer to figures 11-20 and 11-21 and solve as follows:
(1) The sum of the ground speed out (GS
1 ) and the ground speed on the return leg (GS 2) is to the total time in minutes (T), as the ground speed on the return leg (GS,) is to the time in minutes on the outbound leg (t 1)' Minutes on the outbound leg of the flight can be calculated by the formula in (a) below. The formula in (b) below is used for calculating time required for the return leg of the flight; in this formula, tf is the time required for the return leg 0 the flight. These formulas can be calculated as ratio and proportion problems and appear on the computer as they appear in mathematical form.
(a) GS, + GS, =
GS, T t,
(b) GS, + GS, =
GS, T
t, (2) Find the sum of the ground speeds
(160 + 130 = 290). (3) Set total lime (T = 4.5 hours or
270 minutes) under the sum of the ground speeds (290) (fig 11-20).
(4) Under 130 (GS,), read the time on the outbound leg, 2 hours plus 1 minute or 121 minutes (fig 11-20).
(5) Without changing the setting of the computer, under 160 (GS
, ), read the lime required for the return leg, 2 hours plus 29 minutes or 149 minutes (fig 11-20).
(6) These two amounts of time should be equivalent to the total flight lime.
(7) Set 60 index under 160 (GS,). Over 121 minutes (lime on the outbound leg), read the radius of aClion, 322 NM (fig 11-21).
87

..\1' ",,,,,,,\(;,,,TIO,,, DI;~l)"
,,~'I-~ . -.. ,
.t('-tO , ,JoO? ..: '_"..",."./, ""',
(.0"" .\"" ~..',"...,;:',... "'Q
.
,:';..'~ .)..
.,~ ",~".'j .
J,;(..;>'~ .:~;;~'\ '.. l. """ .'j"
.~~ ~;- -! \".".,',:-. \ . -il
\Vý~ .~ \" ,. '..~ " '1'"
\\:, ~;:" ;;:,.. :", ;:/.~l7
/'~~~-, ~';'''4-
. >~.:;!. .~' oX, c<: ~,(~/.t:\ .
1111.."'" ....."...",,\\; , ~"'" ~,j'''~''r''''''''
Figure 11-20. Radius of action time computation
FIgure 1 1-21. Radius of action distance
computation
Section \I Wind Problems
11-19. Disk and correction scales Wind problems are solved by the grid
side of the DR computer (fig 11-22), It
consists of a transparent, rotatable plotting disk mounted in a frame on the
reverse side of the circular slide rule, A
compass rose is located around the plotting disk. The correction scale on the
top frame of the circular grid is
graduated in degrees right and left of the
true index (labeled TRUE INDEX). This
scale Is used for calculating drift or drift
correction and is labeled DRIFT RIGHT
and DRIFT LEFT, A small reference circle, called a grommet, is located at the
center of the plotting disk,
11-20. Reversible grid A reversible sliding grid (fig 11-22) inserted between the circular slide rule
and the plotting disk Is used for wind
computations. The slide has converging
lines spaced 2 degrees apart between
the concentric arcs marked 0 to 150 and 1 degree apart above the 150 arc. The
66
concentric arcs are used for calculations
of speed and are spaced 2 units (usually
knots or miles per hour) apart. The
direction of the centerline coincides with
the index. The common center of the
concentric arcs and the point at which all
converging lines meet is located at the
lower end of the slide. On one side of
the sliding grid, the speed arcs are
scaled from 0 to 270; on the reverse
side, from 70 to BOO, The low range of
speeds on the sliding grid is especially
heipfui in solving navigational problems
for aircraft having slow flight speed
characteristics.
a. Correction factors. There are F
correction factors on the front side of the
sliding grid. These are used for
calcuiating TAS caused by compressibility of air at high airspeeds
and altitudes. Army aircraft do not
require the application of these correction factors to their TAS (fig
11-22),
~...;. "
.
'~.'''''. ~";"~'<;:::::';,"~', ",.' -;;;:;-,~;..,..~-=-~~..,,<...
-,,0;< . -. +:'- 0". "-- .. - ~..!:.. r
~~; l:i~o~o~t~;}L ~!~j.j 'COR~~
,i",.}.', ,;/i :~:':,' x
~."""'-" ',". ,; ,(M'"",;';
, ",.>--~=~--,,/) ~ ..:~':"~t';.~'i;j~. ~
REVf RSI8ll SLIDING
GRtD (fRONT SID!
Figure 11-22. SIIdin9 grid side
15 DECEMBER 1964 UPDATE. FM 1-240

b. Rectangular grid. There is a
rectangular grid on the reverse side of the sliding grid (fig 11-23). It is designed so that the left half can be used for calculations on the 70 to 800 side of the sliding grid. The right half can be used with the 0 to 270 side of the sliding grid. On the left half, each small division has a value of 10 units; each large division has a value of .50 units, On the right half, the small squares have a value of 3 units; the large squares, a value of 15 units. This grid is used for solving problems such as oft-course correction, air plot, and radius of action and for correcting reported wind (para 11-28),
~ ~ , -
,
:,:::: :::. '~::: ::::;::::+::: ... ...: :::: :::: t:::: :: ::1:;:' :::
.~ "' '... .-4r4 ".,. _0.. .... .... '''' ..~. .. -- '" r
... .. .... ...~ ~..- _... ... ~
+. '..-. .... -... "" .-.-. +.-. --.. _.-.. --- --.. . .
-.~. ~.- .... --- .-- -... .... '... ---- -.- ...-. ,.-
-'-'. "', .... "'. ".. '-' "'''- .
-.. 0.. "-- .-. .
-... '.., -.t. ... .. ..., .-.
Figure 11-23. Reverse of sliding grid side
11-21. Wind triangle construction Problems involving wind can be solved by constructing a wind triangle. In its simple form, this triangle (fig 11-24) is made up of three vectors (six vector quantities) whose elements are always the same,
a, The three vectors necessary to construct a wind triangle are as follows:
(1) A wind vector, consisting of the wind direction and speed.
(2) A ground vector, representing the movement of the aircraft with respect to the ground, and consisting of the course (or track) and the ground speed.
(3) An air vector, representing the movement of the aircraft with respect to the air mass, and consisting of the heading and the true airspeed.
b. The direction of such vectors is shown by the bearing of a line with reference to north. The magnitude of the vector is shown by comparing the length of a line with an arbitrary scale. For example, if 1 inch represents 10 knots, then a velocity of 40 knots would be shown by a line 5 inches long (fig 11-24),
c. Necessary steps for drawing the wind triangle are to- (1) Draw a vertical reference line with an arrow at the top indicating north.
(2) Draw a very short line intercepting the reference line at a convenient point to indicate the point of origin in the diagram,
(3) Draw in the known vectors (a above).
(4) Close the triangle to determine two unknown factors. Known and unknown factors will vary, but each factor can be determined, provided each vector Includes its own factors, namely direction and length.
CD
@
COUI/s,
.~. '90. a,fou-\,o
50 k, 5PEiD
HEADING AND IRuE AI15PE!D I'A~I
1108'6010
0
, "
,
KNOH (KT)
" I
\ , " '- "-
-, - , 1'00 \
" \ I I
/ /
// ,/
Figure 11-24. Representing the six vector quantities In a wind triangle
15 DECEMBER 1984 UPDATE. FM 1-240 89

11-22. Wind triangle solution Figure 11-25 illustrates the construction
of a wind triangle to solve tor heading
and ground speed when the course, wind
velocity (WV), and TAS are known. Similar triangles are used to solve for heading and TAS or for WV.
a. Plot the wind vector first (AB).
b. Plot the course for an indefinite
distance from the point of origin (AD).
c. Swing an arc from the end of the
wind vector (B), using the TAS as the arc
radius, to intersect the course line (C).
Draw the air vector (BG).
d. Measure the heading by determining the angle formed between the vertical reference line and the air
vector. e. Measure ground speed along the
ground vector (AG).
11-23. Wind problems In solving wind problems on the
computer, part of a triangle is plotted on
the transparent surface of the circular
disk. Lines printed on the slide are used
for the other two sides of the triangle.
The center of the concentric arcs (fig
11-26) is one vertex of the triangle.
There are many methods applicable for computing anyone probiem, but the
following method for each type of
problem is standard for use in Army Aviation. This section includes probiems
where the centerline is used as ground
vector and the wind vector is plotted
above the grommet.
NOTE: Directions used in solving wind
problems must be compatible. Directions
are all in rderence to true north or all In
reference to magnetic north.
90
(0 E
Dee ~ / plot TAS
/.
t N
-
"mea su re head ing
\
" ~I. " o~ " ('0
-'>1{:> " (,""$ OJ' " ~
(,..... "- ~G'~ S
It .B v
... 0
/ , -' - -
~\~ ,:\0'
~
Figure 11-25. Solving for heading and ground speed
>
~
~ "
-
Figure 11-26. Wind trtangle on DR computer
15 DECEMBER 1964 UPDATE. FM 1-240

11-24. Heading and ground speed computation
a. Problem. The wind is from 160 degrees/30 knots, the true airspeed is 120 knots, and the course is 090 degrees. What is the heading and ground speed?
b. Solution. Refer to figures 11-27 and 11-28 and solve as follows:
(1) Set 160 (direction from which the wind is blowing) under the TRUE INDEX (fig 11-27).
(2) Plot the wind vector above the grommet 30 units (wind speed) and place a wind dot within a circle at this point.
(3) Set 90 (course) at the TRUE INDEX (fig 11-28).
(4) Adjust the sliding grid so that the TAS arc (120 knots) is at the wind dot.
(5) Note that the wind dot is at 14 degrees converging line to the right of centerline.
(6) Under the 14 degrees correction scale (DRIFT RiGHT) to the right of center at the top of the computer, read the heading (104 degrees).
(7) Under the grommet, read the ground speed (106 knots).
11-25. True airspeed computation a. Problem. The wind is from 090
degrees/20 knots, the counse is 120 degrees, and the ground speed is 90 knots. What is the heading and true airspeed?
t ~'
\'
-;t~~'b -l k ~,\!~~~~.\\\\\\\IIII~!''0.\'J~JI~''':~ ~,þ' ~\~'~\\~",~ UJD .180 J~ "S',//,J,11íIIIZU , ..
.
41,. :\,\~.,\ .. ''ilk&/. ~ ~~,,:,,\ (!P :"., ~: : - .: :
-:-; -
",-.?Jft~~" >"'?'." .
"CC .."..",/ . ""\f~ .
'~ ~', . .
~
'.
'''~ ~':::,..:/::~ . ""1,4. .
."
.
,,", ..
.",....a. ~.$~\ ~/. ... .. -'.. "-' ct"~\,\
"""". 0,. ""of....",,,'. -. "1, AI - --- ~""-".' " ',,,.'Y . ~ ." ... ~ -""I,,, I 0It Ot<' (lItE \ '\"'\"~.., t,-<I-
".. .... 1)",,' ;:""",.."1....1.."\,,,, .11
.... ~
.,." ..~' ,
".. O"/rlt ,. ...'tJ.:: -
'\'''''11.' '1--.:.....~.,.~ I,,,,. .O"\,V- \
. .,. ~ Ð~ ~,,,..,,,,,.. TC8).!..:-,"",' ." --~,,,.,. " .~. lllJ-' .
~'..
Figure 11-27. Plotting the wind vector to solve for heading and ground speed
~
,
)
Figure 11-28. Reading heading, wind correcllon, and ground speed
15 DECEMBER 1984 UPDATE. FM 1-240 91

b. Solution. Refer to figures 11-29 and
11-30 and solve as follows: (1) Set 90 (wind direction) under the
TRUE INDEX and plot the wind vector
20 units above the grommet using a dot
within a circle (fig 11-29). (2) Set 120 (course) under the TRUE
INDEX (fig 11-30). (3) Move the siiding grid so that the
ground speed concentric circie (90
knots) is at the grommet. (4) The wind dot is now on the
converging iine 5 degrees to the left of
the centerline. Read the heading (115
degrees) 5 degrees left of the TRUE
INDEX on the correction scale. (5) Under the wind dot, read the TAS
(108 knots).
11-26, Wind velocity computation
8. Problem. The heading is 130
degrees, the true airspeed is 100 knots,
the track is 140 degrees, and the ground
speed is 90 knots. What is the wind
velocity?
92
~-- - 7 ~ 'JfJ&;ç' i
i ~
----:;';' ;~;.~~\\\\\\\\\III 1111"11111,%;,7 ~ $' ~,,'K'\\::"" to 100,... rlillo/' ->..
'_1:\ ,~'\' .- -.. WI/.I!:'O, ---\'';.~~'.p ;,~ : -" ~ 111%
'< ",p " <\;?-~
/,~ ~ -. 'f~"
"f '
. J g
~
...J/. " ~, ~ "
""'0.. <11:,/ '
"x#:' r ':;"'" ~""'I",~ ~ " - ~ ~\"~":~, I
'... .
"'11/1 ~ 08t M r;jIf.
~\\\\\\'., ~'t>..'
,. ~ :ri~:':;lïIJJWJlli.IjII1.lLl\!\J,I\I\\\\'\\\'c\,.;~.' ,Q"""'
.
.
.'" 0,,/, ,,-': .-..'t-- "",,\' ~.....\' ,\
!f 1 '<;In! ~ '" \'
Î'~. '" c -~.O" "
V*,." 'fC"~ --J I
--"".I! -
Figure 11-29. Plotting the wind vector to solve for heading and true airspeed
.
~.' ~"u;rt..:'r-r-- ~~\\I\\I'::J1'I,(;~t;~~ ;'i> '''\,'1. ~.. .. .. ,lIIW '10""
.},~~ ~ -. . -..g "~~I., ~';"'~ - ""';;:"/ ".i~' ... I' ". "'Ð ~""
~'ìp ...,:,
,
'. ~ .
.
-;:.
,', "'" ~;\.
.
'Î'-:t ~ '" ..~
. ... "" '-::"'.I:"t" '~ .t:r'*'"
""I.~ -3 ~'io."" ".
... "'4""1 ~ ,. .., r:J#- I~i:"'\\'-"'.~:, 1'[' . ""/"'11 Oft ClOt oez 1\,'1'11 '-I'" t."
'. ~
,D,,/. l."d"ol"lllnLilW\\\I\1
.", '<~ o,j~' ,o,'f"
... D',I,It"'1 .., ,,'t>- \,'t-" !!tit ~ ~
'9101 ~ Q"\, ",-
'V..:',.~"'I 'II:"~ ~Q"
"'~<I
Figure 11-30. Reading heading, drift correction, and true airspeed
15 DECEMBER 1984 UPDATE. FM 1-240

b. Solution. Refer to figures 11-31 and 11-32 and solve as follows:
(1) Set 140 (track) under the TRUE INDEX and the grommet over the GS (90 knots).
(2) Since the heading is 10 degrees less than the track, find where the 10 degrees converging line to the left of centerline crosses the 1 DO-knot (TAS) line. Place a dot within a circle at this pOint (fig 11-31).
(3) Turn the circular grid until the dot is directly above the grommet (fig 11-32).
(4) Under the TRUE INDEX, read the direction from which the wind is blowing (075 degrees). The distance in units between the dot and the grommet indicates the wind speed (20 knots).
11-27. Reported wind correction A pilotage fix, furnishing information on track and ground speed, can be used for correcting the reported wind using the rectangular grid portion of the sliding grid.
a. Problem. After flying for 30 minutes, an aviator establishes a fIX on a navigational chart and finds he is 6 miles north of his on-course dead reckoning position. The reported wind for the flight was 30 knots from 125 degrees. What is the actual wind condition?
Figure t1-31. Solving for wind velocity
----1 --L I =+- 1--L -
~ ~~\\:;.:1::::~:~ \.$' ~\'~\\\\".Iø 10 . ~ ""'!:':'I/;, '..J ,.,p ~\,~\ J\ . I;; ~ 'I'"~,,,,, .,~ ~,~~ -
IZ.",:,~ ",., ,{' fP ... ~ "".."/ -'.9 ~~"-, t" I) D ".
"
< <
1 ~ "
'" " '-
Figure 11-32, Reading wind velocity
15 DECEMBER 1984 UPDATE. FM 1-240 93

b. Solution. Refer to figures 11-33, 11-34, and 11-35 and solve as follows:
(1) Place the rectangular grid of the
slide under the transparent disk. (2) Rotate the compass rose until 125
(wind direction) is under the TRUE INDEX (fig 11-33).
(3) Draw the wind vector down from
the grommet (at zero) to the 3D-knot point (fig 11-33, A).
(4) Estimate the additional wind
component. Since the aircraft is 6 miles
north of the desired position after 30 minutes flying time, the wind component is 12 knots. The aircraft would blow off
course twice as far in 1 hour. Since the
aircraft is drifting to the north, the wind is
from the south. (5) Rotate the compass rose until the
letter "5" appears under the TRUE INDEX (fig 11-34).
94
\
::~-r--=:- .
~~.,~. ,.:;~ "...:. -':;~
''Í,.,,,~,.": :fII!:~ '
.,.. 1"1,/ ~ . rÞ" ,..., "4:- '!""I""L 01' N ~ ,,\~..iI'I., ~..,
.. ~ ~"', ~;:"..I""I""!",,h\'o\>> ~ .~ >10' ,~...'
. .~ . ~" ""'9~' .-'. 'O,,':,~~'. -
: -...:' æ::: TC.or!! ~o" r
------~~
Figure 11-34. Plotting the assumed wind
(6) From the end of the first wind
vector explained in (3) above, plot the
additional wind component verticaily downward 12 knots to scale (fig 11-34, B).
(7) Connect the end of this second wind vector with the point of origin of the first wind vector (center of the disk) (fig
11-34, C).
;.-
, 1
.~ I~ -
1-'~- -.'00"': '~ 8'1<>- I ''''' I' -",t-
l "<::
0.". " ... ~""
~'-~' . ~~~
...''''''~ ..'>1'\1'\." iIII!I" ~.\~\"..' "~/'?;I. ~. os CII'A: ~ \I\\\\\~.' ~~.."
,,"'. "oI1nl~I'IIJI'IIIIII"I\I\Ù~\\\~""~~.''f.~Q~'' /
...~ -'Ir a I .." o"~\ ...,"
~~':If., ~.~I
~~ '0<,\'/ j -........... "'" w'" 'fC -'t-
~
,:....--j
r--- .., -----1 I
Figure 11-33. Plotting the reported wind
15 DECEMBER 1984 UPDATE. FM 1-240
(8) Rotate the compass rose until the
corrected wind vector (C) lies along the centerline downward from the center òf
the disk (fig 11-35). Read the actual
wind direction (140 degrees) under the TRUE INDEX. Read the actual wind speed (38 knots) as the length of the
vector (C) along the centerline.
1 j f
Figure 11-35. Plotting the actual wind
11-28. Wind triangle variations a. Many other wind problems can be
solved using the grid face of the
CPU-26A/P computer. This includes track and ground speed, wind and
ground speed from double or multiple
drift, wind from ground speed and drift,
and correction for reported wirid. Wind triangles may also be plotted on the computer, using the centerline as the air
vector, by plotting the wind vector below the grommet.
b. The mastery of the wind triangle
problems discussed in this section is
adequate for flight planning with Army
aircraft. Therefore, a complete discussion of the variations mentioned in 8 above is
not essential or within the scope of this
manual.
Chapter 12 Radio Principles
12-1. General Radio communication and radio navigation are necessary during
instrument flight. All aviators must be
familiar with radio principles and the capabilities and employment of Army aircraft radio equipment.

12-2. Wave transmission According to the wave theory of radiation, sound, light, and electrical energy are transmitted by waves. Strength of all waves depend on their cycles, frequencies, lengths, or amplitudes.
a. Wave. Energy transmitted through a
substance or space by vibrations or impulses moves in waves. When a stone is dropped into a pond, the energy of motion from the stone causes ripples on the water surface. The ripples (waves of energy) travel outward from the place where the stone struck the water, but the water itself does not move outward. The rise and fall above and below the normal undisturbed water level can be graphed as a curved line.
b. Cycle. A cycle is an alteration of a
wave from a specific amplitude through a
complete series of movements back to the same amplitude ("e" below). This is
one complete wave vibration. A cycle (fig 12-1) is represented by the portion of the wave from A to E, from B to F, from C to G. Or a cycle is between any other two points encompassing exactly one complete amplijude variation. A cork floating on calm water is subjected to cyclic wave movement when a stone is dropped into the water. One wave cycle occurs as the cork rises from the calm water level (normal position) up to the
B
w
a
::>
I- --' Cl.. ~ <I:
A 0
wave crest, drops back to normal, falls into the wave trough, and rises back to normal. A cycle is also completed when the cork moves from the crest of the wave down to the normal position. It then falls into the wave trough, rises back to normal, and continues rising to the top of the wave crest. Thus, a cycle is any complete sequence of amplitude variation in a repetitive series of wave movements.
c. Frequency. The frequency of a
wave is measured by the number of cycles completed in 1 second. If two cycles are completed in 1 second, the wave frequency is two hertz (Hz). Since the number of hertz runs into high figures, radio frequencies are commonly expressed as kilohertz (kHz) (1,000 hertz) or megahertz (MHz) (1,000,000 hertz). Hertz is a unit of frequency equal to one cycle per second.
d. Wavelength. The linear distance of a cycle is known as the wavelength. In figure 12-1 the wavelength from A to E
can be expressed in meters, feet, miles, or any other suitable linear measurement.
e. Amplitude. The amplitude of a wave is its magnitude measured from a
specific reference level. In figure 12-1, the peak wave amplitude is represented by the lines BH, ID, or FJ; other
F
c 0
E
0
Figure 12-1. Wave representation (elternatlng current)
15 DECEMBER 1984 UPDATE. FM 1-240
amplitudes are shown as lines LM and NP. All representations were measured in linear distance above (+) or below H reference line AD.
12-3. Direct and alternating current An electrical current flows by the movement of electrons through a
conductor. Direct current flows in only
one direction. An alternating current flows in one direction for a time and then flows in the opposite direction for the same length of time with a continuous movement. An alternating current (fig 12-1) can be represented as a
continuous flow of electrons with half of each cycle being negative and the other half being positive.
12-4. Radio waves An electrical current builds up a
magnetic field around the conductor through which it flows. When alternating current flows through a wire, the magnetic field around the wire alternately builds up and collapses. An alternating current of high frequency is used to generate radio waves which are emilted during the buildup and collapse of the magnetic field around a conductor (the antenna). Radio frequencies extend from 10 kilohertz to above 300,000 megahertz.
0
M
95

12-5. Principles of the transmitter a. Generating and transmitting a radio
signal. A radio signal is transmitted by generating an al1ernating electric current of the desired frequency and connecting it to an antenna suitable for radiating that particular wavelength (fig 12-2). The current frequency is determined by the number of times per second that alternating current changes direction of
flow in the antenna.
CARRIER WAVE
úV\f\J\J\. r RADIO fREQUENCY I ] (CARRIER WAVE) .
OSCILLATOR
\\\\\ I 1/ ) )
96
AUDIO fRE~UENCY AMPLIFIER
MQDULATOR
/'---,\ \.~ AUDIO WAVE
Figure 12-2. Radiotelephone transmitter schematic
15 DECEMBER 1984 UPDATE. FM 1-240
~
ww. MODULATED CARRIER WAVE

b. Altering the radiated signal. To transmit intelligible data, the radiated carrier wave (fig 12-3, A) is altered in
some manner and these alterations are decoded at the receiver. Code is transmitted by interrupting the carrier wave (fig 12-3, B} into a series of dots and dashes. Code can also transmit by modulating the carrier wave with another steady tone (fig 12-3, C) which is
interrupted to produce the desired code. Voice is transmitted by molding or modulating the carrier wave signal with audio wave transmissions (fig 13-3, D) generated through the radio microphone. The combined carrier wave and audio wave appear as in E, figure 12-3, if the audio wave is superimposed by amplitude modulation (AM) of the carrier wave. If the audio wave is superimposed by frequency modulation (FM). the combined wave will appear as shown in F of figure 12-3. Both AM and FM are used in transmitting voice to US Army aircraft, but AM is the most common method. A modulated signal is commonly called a modulated carrier wave when either voice or tone signals are used in the modulation process. (Fig 12-3, C, E, and F represent modulated carrier waves. Fig 12-2 illustrates voice modulation of a carrier wave.)
12-6. Principles of the receiver a. Tuning. Radio waves induce minute
electrical currents in receiving antennas. This process is the same as inducing an alternating current in one conductor by placing it near another conductor carrying alternating current. The method of selectinn the desired signal from the many induced signals is called tuning. The tuning circuit in the receiver is adjusted to resonance with the frequency of the desired signal; other frequencies are rejected by the tuning circuit. The selected frequency is unintelligible at this receiving stage since it is still a
combination of the radio wave (carrier wave) and the audio wave (voice).
A. CARRIER WAVE .contJn-- unmodu_.
8. INTERRUPTED CARRIER WAVE. for "'-"11-.
NO I TONE I NO
TONE INOI
TONE OASH
TONE APPEARS CONTINUOUS OOT
C. CONnNUOU8 WAVE MODULATED WITH TONEBIGNAL.
_10-"""''''__. +
D. AUDlOWAVE-___lbIe_oIglI8I._.............-- C8PII8r ..ve, the poettvo11r InCII the C8nter..ft ernpII1:IMIe 8nd th8Mg8t1veI.0docr 1 th8--""lIJnplltudeIE_'.
E. CARRIER WAVE II. -I with _10 w8",,(D_'oupeoI.....- byompilludo-IAMI.
F. CARRIER WAVE 11.-1 with - -.. ID-..loupeoI.....- by
fNqU8flCy madul8don (FM).
Figure 12-3. Radio waves
15 DECEMBER 1984 UPDATE. FM 1-240 97

(8) Extremely high frequency (EHF),
30,000 to 300,000 megahertz.
NOTE: Although the Federal Communications Commission designates
300 to 3,000 megahertz as UHF, the UHF radio frequency band in aviation
communication begins at 200 megahertz.
12-7. Classification 01 frequencies
a. Audio frequency (AF). Twenty to
20,000 hertz.
b. Radio frequency (RF).
(1) Very low frequency (VLF), 10 to 30 kilohertz.
(2) Low frequency (LF), 30 to 300 kilohertz.
(3) Medium frequency (MF), 300 to 3,000 kilohertz.
(4) High frequency (HF), 3,000 to 30,000 kilohertz.
(5) Very high frequency (VHF), 30 to
300 megahertz. (6) Ultra high frequency (UHF), 300 to
3,000 megahertz. (7) Super high frequency (SHF), 3,000
to 30,000 megahertz.
b. Demodula ting. Another stage of the
receiver, calied a demodulator or
detector, is used to separate the audio
wave from the carrier wave. The audio portion of the wave is amplified and used to vibrate the diaphragm of the headset or a speaker. This vibrating surface causes audible sound waves, reproducing those which entered the
microphone at the transmitter (fig 12-4).
NOTE: Since the frequency of a carrier
wave is above the audible sound range, a beat frequency oscillator (BFa) is used to convert coded interrupted carrier wave signals into audible, intelligible sound.
12-8. Low frequency radio wave propagation (nondlrectlonal) A radio wave leaves the transmitting
antenna in ali directions. That portion of
the radiated wave foliowing the ground is
calied the ground wave (fig 12-5). The ground wave is conducted along the
earth until its energy is absorbed or depleted by the attenuation process,
~ / DESIRED
MODULATED CARRIER WAVE . nJ\Jv~
~KE.~))). t
SOUND WAVE
( TUNER
(SELECTS AND AMPLIFIES DESIRED FREQUENCY)
DETECTOR
~ AUDIO WAVE
AUDIO FREQUENCY AMPLIFIER
-
-=
Figure 12-4. Radiotelephone receiver schematic
IONOSPHERE
~\\)/JJ '
~I~ ,:.'<. ,,'" /)) '\'\'\ ~
~~ ,,"\)) '\ '\ \ ~
0';- '\'\ ))) \ '\ '\ ~ .
'\" ))) \\\ ~ Y )~'\'\ ~
~ ", \ \\J~!)Np..\Jf. SKIPZONf. .il'1r ~
~ì \<f~O,- J ~ KANSAS ---- /J A~~ ~~::,:n\J. CITY -------./L .'
~ Gf\p..I\SOf\I\f.O SKIP ... B .... SKIP ~Ù \..05
>ö:.----- OISTANCE DISTANCE ------...~~A
~G~\.. 'v;~ po:
Þ. C
Figure 12-5. Radio wave transmission
15 DECEMBER 1984 UPDATE. FM 1-240 98

paragraph 12-10. The remainder of the radiated energy is called the sky wave (fig 12-5). The sky wave is radiated into
space and would be lost were it not for the refracting layers in the atmosphere. These layers are in the region of the atmosphere called the ionosphere, the region where air is ionized by radiation of the sun. The relracting effect on the waves returns them to earth and permits signals to be received at distant points. The effect on reception distance is determined by the height and density of the ionosphere and by the angle at which the radiated wave strikes the ionosphere. The ionosphere varies in height and density with the seasons, time 01 day, and latitude.
12-9. Skip distance The distance between the transmitting antenna and the point where the sky wave lirst returns to the ground is called the skip distance (fig 12-5, AB). By e><tension, this term also includes the distance between each surface reflection point in multi-hop transmission (Iig 12-5, BG). Tha distance between the point where the ground wave can no longer be received and the point where the sky wave is returned is called the skip zone. Solar radiation changes the position and density of the ionosphere. Therefore, a
great change in skip distance occurs at dawn and dusk, causing the fading of signals to be more prevalent than usual.
12-10. Effect of all matter on radiation All matter within the universe has a
varying denree 01 conductivity or resistance to radio waves. The earth itsell acts as the greatest resistor to radio waves. The part of the radiated energy that travels near the ground induces a voltage in the ground that subtracts energy from the wave. Therefore, the ground wave is attenuated (decreased in strength) as its distance from the antenna increases. The molecules of air, water, and dust in the atmosphere and matter at the earth's surface, such as trees, buildings, and mineral deposits also absorb radiation energy in varying amounts.
12-11. Effect of static upon low and medium frequency reception Static disturbance is either man-made or natural interference. Man-made interference can be caused, lor example, by an ordinary electric razor. Each small spark, whether originating at a spark plug, contact point or brushes 01 an electric motor, is a source 01 radiation. All frequencies from zero to approximately 50 megahertz are transmitted Irom each spark and, consequently, add their energy to any radio reception within this frequency
range. Naturai static may be divided into two types. Interference which originates Irom natural sources away from the aircraft is called atmospheric static. Inteference caused by electrostatic discharges from the aircraft is called precipitation or canopy static.
12-12. General nature of high frequency propagation (3,000 kilohertz to 30 megahertz) The attenuation 01 the ground wave at frequencies above approximately 3,000 kilohertz is so great as to render the ground wave of little use for communication except at very short distances. The sky wave must be used. Since it reflects back and forth from sky to ground, communications can be maintained over a long distance (12,000 statute miles, for example). Frequencies between LF and VHF produce the greatest radio transmission range between points on the earth because they are refracted by layers 01 the ionosphere and follow the curvature of the earth. The range of low Irequencies is reduced by attenuation and atmospheric absorption, and VHF or higher frequencies penetrate the ionosphere and escape to outer space.
12-13. General nature of VHF and UHF propagation (30 to 3,000 megahertz) Practically no ground wave propagation occurs at frequencies above approximately 30 megahertz. Ordinarily there is little refraction from the ionosphere, so that communication is possible only if the transmitting and receiving antennas are raised far enough above earth's surface to allow the use 01 a direct wave. This type of radiation is called line-ol.sight transmission. Thus, VHF/UHF communication is dependent upon the position 01 the receiver in relation to the transmitter. When using airborne VHF/UHF equipment, it is 01 utmost importance to be aware of the factors limiting communication range. Une of sight computed for various altitudes is shown in figure 12-6.
15 DECEMBER 1984 UPDATE oFM 1-240
Height
Above the Ground Feet AGL KM 8M NM
5 5.2 3.2 2.8 10 7.2 4.5 3.9 20 10.4 6.4 5.6 40 14.6 9.1 7.9 80 20.7 12.6 11.2
100 23.1 14.4 12.5 200 32.7 20.3 17.7 300 40.1 24.9 21.7 400 46.2 28.7 25.0 500 51.8 32.2 28.0
1,000 73.3 45.5 39.6 2.000 103.4 64.3 55.9 3,000 126.7 7B.7 68.5 4.000 143.3 90.9 79.1 5,000 163.5 101.6 a8.4
10,000 231.0 143.7 125.0
The fCM'mula used to determine the line of sight (LOS) for any attitude is as follows: LOS = 1.25 x dh where dh = the difterence in
aMude between the transmitting and receiving antenna in feet.
NMx1.15=SM NMx1.85=KM
Une-of-Sight Transmission Range
Figure 12-6. VHF/UHF range
Chapter 13 VHF Omnidirectional Range (VOR) System
Section I
Components and Operation
13-1. General The VOR system Is the primary navigational system used by Army aviators in the United Slates. The VOR is a VHF faciiity which provides 360 usable courses to or from the slation. The terms "omni" and "VOR" are often used interchangeably.
13-2. Static Interference VOR eliminates atmospheric static interference. VOR also eliminates other limitations associated with the older low. frequency facilities that it has replaced.
99

31~' ~ ?\ v \J
- ~/~ 270' ^O0~8
=.~I\
13-3.\Transmltter and receiver fundamentals A VOR transmitter emits two
signals-the variable signal and the
reference signal. The variable signal is
transmitted in only one direction at any given time. However. the direction of its
transmission varies so rapidly that the signal appears to be a continuous signal
rotating clockwise around the station at approximately 1,BOO RPM. Receivers which are correctly tuned to a station will
receive both signals. The two signals are in phase only at magnetic north. At all other points around the station, there is
a definite difference between the signals
(fig 13-1). Receivers in the aircraft detect the phase difference either by a centered indicator needle representing an on. course position or by a deflected needle to the right or left of center representing
an off-course position. The signals may also be fed to a radio magnetic indicator (RMI) (fig 13-6) to show the magnetic
direction to the transmitting station.
13-4. VOR receivers Army aircraft utilize several different
types of VOR receivers. Detailed information concerning the set installed in each aircraft and the operating instructions are contained in the
operator's manual.
..
100
MAGr-.E T IC NORTH
~ o.
18011
- 0- ~ 45.
~
~ 135'
\.YJ
Figure 13-1. VOR signal phase differences
15 DECEMBER 1984 UPDATE. FM 1-240

13-5. VOR course Indicators The VOR navigation signal is displayed on an instrument called the course indicator. Several different types of course indicators are in use in Army aircraft. The most common are the 1D-453 (fig 13-2) and the 1D-1347 (fig 13-3). Detailed information concerning the course indicators installed in each aircraft is contained in the operator's manual.
1. COURSE ARROW (HEADI
2. FIXED COMPASS CARD
3. COURSE DEVIATION INDICATOR
4. GLIDE SLOPE INDICATOR
5. GLIDE SLOPE WARNING FLAG
6. TO-FROM INDICATOR
7. COURSE WARNING FLAG
8. COURSE ARROW IT All)
9. COURSE SET KNOB
Figure 13-2. 1~53 course Indicator
RECIPROCAL INDEX
GLIDE SCOPE FLAG WINDOW
BLUE/YElLOW OFF COURSE
INDICATOR
Flgur. 13-3. 1D-1347 course Indicator
15 DECEMBER 1984 UPDATE oFM 1-240
ON-COURSE INDEX
VOR/ LOC WINDOW
GLIDE SLOPE INDICATOR
TO-FROM INDICATOR
COURSE DE VIA nON INDICATOR
OMNI-BEARING SElEC nON KNOB
101

A A I v
STATION I (~~.a ;::,-...
I 2
:--.. I
,,~ ""'..liOo I " Jm, ......::::::-..
~-b ~~ I 8 /8 V
""~............~ I
Ð\ ~ruA~~ì( ~ '" '-......
I --"--".......... C /' "'-......~8 -"""""':"'--
0 0 """""', .......~ V
.'
'.' "'8''''' C
/'/' .......... .
. '- -' .......... @..'Oo"----"CD-"""""""'"""" ~
.'" " ~ I' D '" '
" " - 0
"
0 0 '"
a. Course selector. The course selector knob or omni-bearing selector is
manually operated to seiect the course that is desired for VOR navigation. The aviator places the arrowhead (pointer) or
arrow tail (ball) on the desired course (10-453). The course card is moved in
order to place the desired course or its
reciprocal under the inde. on the 10-1347 (fig 13-4).
STATION
!\~) ~.
~2100COURSE
0 ~------- VQR COURSE INDICA.TOR
Figure 13-4. Course selector operation
102
b. TO-FROM indicator. This indicator
responds automatically to any course that is selected on the course indicator. It indicates whether the course selected, if flown, would take the aircraft to or away from the VOR station (fig 13-4). if
the course selector is moved past a
course which is 90 degrees to the
station, the TO-FROM indication will
change. When an aircraft flies across a
radial which is 90 degrees to the course selected, there may be a short period of time when the indicator display will be blank. The aircraft heading has no effect
on the TO-FROM indicator.
c. Course deviation indicator. The course deviation indicator displays
course deviation relative to the localizer
course of the instrument landing system (ILS) or to a selected VOR course. Figure 13-5 shows the course indicator readings with respect to a selected course of 300 degrees using the VOR.
NOTE: The course deviation indicator is directional when the aircraft heading is
0 0
0 0
Figure 13-5. Deviation indicator operation
15 DECEMBER 1984 UPDATE' FM 1-240
within 90 degrees of the course indicated by the course arrow.
(1) Needie centered. When the aircraft is actually located on the selected course (Figure 13-5, aircraft A. B. and C), the deviation needle is centered regardless of the aircraft heading.
(2) Fufi-scale needle deflection. If the aircraft is off the course by 10 degrees or more on VOR (fig 13-5, dashed radials), the needle deflects full scale to
one side (fig 13-5, aircraft D). The course indicator face is graduated horizontally left and right from center with dots (course deviation scale). This
represents a deviation from course of 10
degrees when using VOR and 211,
de9rees when using the I LS localizer.
NOTE: Course deviation indicator displays, associated with the localizer of the ILS. will be illustrated in Chapter 19.
d. Course and glide slope warning flags. These warning flags are located in
close pr6.imity to the course deviation needle. There are two warning fla9s, one
0
0
0
c

for the course deviation indicator (VOR or localizer) and the other for the glide slope. The flags are usually labeled "OFF." However, on some course indicators, the warning flags may not be located near the respective needle. In
this case, they will be labeled "LOC" for localizer and "GS" for glide slope. Appearance of the warning fiag indicates that the respective indicator (course deviation indicator or glide slope) is not receiving a signal strong enough to provide reliable information.
e. Glide slope indicator. The glide slope indicator needle indicates whether the aircraft is on the glidepath or is deviating above or below the glide path. The course indicator face is graduated vertically up and down trom center with dots (glide slope deviation scaie) representing a deviation from the glidepath up to 'h degree. The glidepath indicator is only activated when the receiver is tuned to an ILS frequency. Glide slope indicator wiil be illustrated in
chapter 20.
13-6. Radio magnetic Indicator The radio magnetic indicator (fig 13-6) consists of a compass card, a heading index, two bearing pointers, and a
pointer function switch. It enables simultaneous determination of the present magnetic heading and the direction to and from the navigational facility which the Number 1 bearing pointer is coupled. It also enables direction to and from the navigation facility which the Number 2 bearing pointer is coupled.
POINTER FUNCTION SWITCH
,
a. Compass card. The compass card is moved by the aircraft's slaved gyro compass system. When working properly, the card shows the magnetic heading under the heading index.
NOTE: A preflight cross-check of the compass card with a known heading (magnetic compass) should always be made.
b. Numbers 1 and 2 bearing pointers. These two bearing pointers are moved by either the VOR, tactical air navigation (TACAN), or automatic direction tinder (ADF)radio receivers. Each bearing pointer, when coupled to a navigation receiver, will indicate the direction to the navigation facility being received. Based on the number and type of receivers installed, there are several coupling
arrangements possible. Normally the Number 1 bearing pointer will be connected to the ADF receiver and the Number 2 to the VOR receiver. I nformation or coupling arrangements for specific aircraft types and models can be found in each aircraft operator's manual. A bearing pointer that can be coupled to a VOR or ADF receiver will have this
coupling accomplished by the position of the pointer function switch.
Section II
Flight Procedures
13-7. Operation
When the course indicator and the RMI
are in operation, the indications of either
or both of these instruments can be used to accomplish VOR flight procedures. Where the RMI is included in an illustration, the Number 2 bearing pointer will be coupled to the VOR receiver. This will indicate the magnetic bearing to the VOR which is tuned in the receiver. The opposite end or tail of the needle will indicate the radial from the VOR station on which the aircraft is located. The Number 1 bearing pointer displayed in
the figures of this chapter is
nonfunctional.
13-8. VOR positions The set should be turned on and placed in operation in accordance with the instructions in the operator's manual for the aircraft. The desired VOR station frequency is placed on the frequency seiector dial. Positive identification is needed of the station by its repeated three-Ielter Morse code group, or a
three.lelter Morse code group alternating with a recorded voice identifier. If required, the pOinter function switch is
moved to the VOR position.
BEARING POINTERS
CAUTION: Bearing pointers will n01 function in relation to the instrument landing system,
.
flgùre-n~~-~ãâlo magnetic indicator' 15 DECEMBER 1984 UPDATE oFM 1-240 103

13-9. Orientation a. Courses and radials. The desired
course is selected with the course selector. The term "radiai" refers to a
course emanating from a VOR station. On navigation charts, courses are published as directions outbound from the von stations (radials). It is frequently
convenient to refer to the position of an aircraft in terms of the radial on which it
is located. For example, figure 13-7 shows three aircraft on the 090-degree radial. Aircraft A is on the 090-degree radial following a 270-degree course inbound to the station. Aircraft B is on the 090-degree radial following a 090- degree course outbound from the station. Aircraft C is crossing the 090- degree radial flying a heading of 320 degrees. In each position, the Number 2
bearing pointer indicates the course to the VOR station and the opposite end of the needle indicates the radial.
b. Orientation procedure. (1) Without moving the course selector
(unless TO or FROM is not indicated), a
compass rose should be visualized on the face of the 10-1347 with a line drawn from the selected course to its reciprocal (dashed line, fig 13-8). Then a line drawn 90 degrees through this course line (solid line, fig 13-8) should be visualized. The position of the TO-FROM indicator should be noted. In figure 13-8, there is a "TO" indication. This indicates that the aircraft is in the sector north of the soiid line. Next, position of the course deviation needle should be noted. It is deflected to the right, indicating that the aircraft is east of the dashed line. Therefore, the aircraft is located in the quadrant between the 345-degree radial and the 075-degree radial. The ball is
moved to the right within this quadrant
VOR COURSE INDICATOR
..
~ STATION
"fJR~
ffi'O iA , I
I
0 I I
A I
8 090" RADIAL
until the course deviation needle centers. The position of the ball will indicate the radial that the aircraft is on.
(2) Another orientation method is as follows: The course selector is rotated until the TO-FROM needle reads "TO" and the course deviation needle is
centered. Now the course to the station is known. The reciprocal of this course is
the radial upon which the aircraft is
located. An alternate procedure is to center the course deviation needle with a
"FROM" indication. Now the course away from the station is known. This
course is also the radial upon which the aircraft is located. When an RMI is used
DASHED LINE \ \
with the VOR receiver, the above orientation procedures are not required. When the receiver is tuned to a VOR, the bearing pointer of the RMI will indicate the magnetic heading to the station and the opposite end of the needle indicates the radial upon which the aircraft is located. Now there is
orientation made in relation to the VOR station.
13-10. VOR stations The procedures for maintaining a course to a station are illustrated in figure 13-9. The aircraft maintains a 360-degree course to the VOR station.
.
SOLID LINE
EÐ
\ \ \
Figure 13-8. Use of course deviation indicator in orientation
0 0
Ie I I I I I
B C I
8 0 ..
B C
0 0 0 0 0
A
104
Figure 13-7. Relationship of aircraft positions-as described by radial, course, or heading
15 DECEMBER 1984 UPDATE' FM 1-240

Eþ
STATION HEADING INDICATOR
VOR COURSE INDICATOR
0 0
~
0
0
--------------------
.... :.: ~ ~ Q 1.1.1
Q Z 1.1.1
~ ~ 1.1.1
tJ) a:: ::J 0 U
0
( ,
0
Figure 13-9. Maintaining a course to a station (VOR)
15 DECEMBER 1984 UPDATE. FM 1-240 100

a. Position A. In position A, the aircraft is on course. The course deviation indicator needle is centered, the TO- FROM indicator indicates "TO" and the bearing pointer indicates "360 degrees."
b. Position B. In position B, the aircraft has been blown off course approximately 5 degrees. The crosswind is from the left and the course deviation indicator is
deflected to the left. The bearing pointer indicates "355 degrees." To return to the
course, the heading must be corrected to the left. The standard correction under normal wind conditions is 20 degrees for aircraft with airspeed at or above 90 knots and 30 degrees for aircraft operating below 90 knots.
c. Position C. In position C, a heading change of 20 degrees is applied. The aircraft heading is now 340 degrees.
d. Position D. In position D, the aircraft has returned to the course-the course deviation indicator needle has recentered. The bearing pointer again indicates "360 degrees." If the present heading of 340 degrees is maintained, the aircraft will fly through the course. If
the aircraft is returned 10 the original heading of 360 degrees, the aircraft will
be blown off course again. e. Trial drift correction. To avoid both
situations, the heading is changed by turning toward the course by half the amount of the initial correction. An example would be turning toward the course 10 degrees (15 degrees if flying below 90 knots). The aircraft heading is
now 350 degrees. This results in the first trial drift correction for the crosswind. This drift correction may later prove to be either C0rrect, too small, or too large.
(1) Correction too small. If the first trial
drift correction (10 degrees) is too small (wind is stronger than anticipated), the aircraft will again be blown off course from point E to point F (fig 13-10). The heading must again be changed to 340 degrees (fig 13-10, G) in order to intercept the course. The aircraft reintercepts the course at point H. A heading correction (fig 13-10, I) is made by turning toward the course 5 degrees to a heading of 345 degrees. (The aircraft is now using a total drift
correction of 15 degrees.) This bracketing procedure will be repeated until a heading is selected that maintains the aircraft on course.
(2) Correction too large. If the first trial drift correction (10 degrees) is too large (wind not quite as strong as expected), the aircraft will fly off course upwind. In figure 13-11, the aircraft is overcorrecting at point U and flies off course into the wind at point V. The aircraft is returned to the course by returning to a heading of 360 degrees (point W) and allowing the wind to blow the aircraft back on course at point X. When back on course, a 5-degree drift correction (not as large as the initial correction) is applied into the wind (a 10-
106
degree drift correction is applied for flying below 90 knots). The heading of
the aircraft is now 355 degrees. If this
heading maintains the course, no further heading change is required.
(3) Correction for unusually strong wind. On some occasions, unusually strong winds will prevent the aircraft from returning to the course even when a 20- degree or 30-degree correction is used. If, after applying a 20-degree or 30- degree correction, the course is not reintercepted in a reasonable period of
time. a correction of 40 degrees or more may be required in order to return to the
course. It must be assumed that if 40 degrees is required to return to the
course, approximately half of the correction (in this example 20 degrees)
mey be required to stay on course.
STATION HEADING
~ INDICATOR
~I ~~ui 1----------------- W' :
;i -~': H 0
H 0
~ ~G---~_____m___.~. \ : 1j' G
0 ~- 00
CD F---~~_nm--!tJ-
\ GD F . .~~.
I . %(
E 0
'~. /
0
~
NOTE: Course maintenance procedures discussed here are for guidance only. In flight, these procedures are refined to suit specific flight conditions.
VOR COURSl INDICATOR
Figure 13-10. Trial drift correction too small (VOR)
15 DECEMBER 1984 UPDATE. FM 1-240

----------- ----------------
----------- ---- X --------- --
VOR COURSE INDICATOR
0
0
y 0 0
x 0
STATION
f
y
1
---- -- ------------------
- -
-
--- v - -
-
-- - - -
-- -
-- ----
w 0
v 0
0
u
w ..J c( õ ~
\ 0
0
!9
--- -------- ---
t large (VORl 13-11. Trial drift correction DO Figure
.
.... oFM 1-240 15 DECEMBER 1984 UPDATE 107

13-11. Sialion passage Recognition of station passage is very important because VOR stations are used to fix an exact position, These stations are also used as holding points
for ATC and are often the destination point of an IFR flight to be used during the instrument approach to the airfield, Station passage is determined as follows:
a, Since the approximate arrival time over a station is known, the clock shouid be watched, As this time approaches, the reaction of the TO-FROM indicator should be observed,
(1) While inbound to the station, the indicator will read "TO,"
(2) As the aircraft passes over the station, the TO-FROM indicator will
fluctuate momentarily, then indicate "FROM," The time that this occurs is
station passage time, Also, when flying over the station, fluctuations of the deviation needle and the momentary appearance of the warning fiag will occur. At this time, station passage will
also be indicated by the RMI bearing pointer moving to the reciprocal of the course.
b, If the flight is to be continued on the same course, the procedures for maintaining a course should be followed, The only indicator change is the reversal of the TO-FROM indicator and the reversal of the RMI bearing pointer, If
there is a course change (fig 13-12), the course selector is set to the new course and the aircraft is turned to a heading that will piace it on the new course,
c. Figure 13-13 illustrates another important consideration when the TO- FROM indicator reading changes, The aircraft is flying a heading of 045 degrees (point A), but is not inbound on
@ COURSE SELECTOR SET FOR OUTBOUND COURSE
0 0
the selected Course to the station of 045 degrees. The aircraft continues on the same heading and flies past the station (point B), At the time the aircraft is
abeam the station, the TO-FROM indicator will momentarily have no indication, then wiil change to read "FROM:" This "FROM" reading will remain in the indicator as the aircraft flies away from the station (point C),
STATION
(IDA
'8 0900
0 0
0
0 COURSE SELECTOR SET FOR INBOUND COURSE
108
figure 13-.12. Course selector reset to fly outbound ,on a different course
15 DECEMBER 1984 UPDATE. FM 1-240

~<v / .;)<f-~ ' /
CP()~ /
/:~ Ø/~~ /
/ A
STATION
B Q
C
INDICATOR CHANGING WHEN
ABEAM THE STATION
B
0
A
Figure 13-13. TO-FROM Indicator changea abeam the station
15 DECEMBER 1964 UPDATE. FM , -240 109

I~
.
m w ..~, ,~ ''If
STATION ~ /
~090';~ -B -~"" / w I X y' / I \
/ / I
/ I
13-12. Position checkpoints a. The Victor airways system (see
note) is based on operation of several hundred VOR stations. In addition to the stations themselves, it has numerous other flight checkpoints (intersections). An intersection is a point where two or more radials from different VOR stations intersect. Checkpoints can be established at these intersections for position fixing. The procedure for fixing position over intersections by using one VOR course deviation indicator, RMI bearing pointer, or both, is illustrated in
figure 13-14.
NOTE: Established routes for the purpose of air route traffic control (ARTC) of enroute IFR traffic have been designafed and charted. These routes are called airways in the low altitude route structure which is below 18,000 feet MSL. These routes are jet routes in
the high altitude route structure. Victor airways use VOR facilities and are labeled with a "V" and a number such as "V-241." The north-sourth airways have odd numbers and the east-west airways have even numbers. Jet routes are similar to airways except that they
are labeled with a "J" and a number such as "J-80."
(1) The aircraft proceeds outbound (fig 13-14, W) from station A with the receiver tuned to station A. During this
outbound flight, the correct heading for remaining on the course (090 degrees) is
determined by the procedures outlined in
paragraph 13-9. STATlnN
w x
Figure 13-14. Position fixing at an intersectlon,-çourse selector reading ~'FROM"
15 DECEM8ER 1984 UPDATE oFM 1-240 110
(2) After establishing the desired heading to remain on a 090-degree course, station 8 is tuned and identified.
(3) The 130-degree radial from station 8 crosses the 090-degree radial from station'A to establish the intersection (open triangle symbol). The course selector is set on 130 degrees, and since this is the radial from the station, the TO- FROM indicator will read "FROM" (fi9 13-14, X).
(4) At the time the aircraft is exactly over the intersection (fig 13-14, Y) the deviation indicator will center since the aircraft will then be on the 130-degree radial from station 8. Also, the Number 2 bearing pointer will indicate 310 degrees at the intersection. After the intersection is determined, the course selector is
reset to 090 degrees, station A is tuned and identified, and course maintenance procedures resumed.
b. In performing the procedure discussed in "a" above, it is important to be able to interpret the direction of needle deflection. In the situation depicted in figure 13-14, the needle is
deflected to the left while the aircraft is
at point X. Prior to arrival at the intersection, the deviation indicator may be deflected to the same side on which the station is located. This will occur if the course selector has been set on the published radial which causes the TO- FROM indicator to read "FROM."
c. It may be convenient or necessary to fix an intersection by setting the
course selector for a "TO" reading (fig 13-15). In flying from station A to station
8, the aircraft is to be turned inbound to station 8 when it arrives over the 81unk intersection.
0 \
Z \ \ , \
\ ,
y z

y' , ,
, ,
BLUNK INTERSECTION
z
Z I I I
I ?!:JJ.O
I~ B
-------- x
(j)w"""""" ......
...... ......
....
0
STATION A w
Q) x (TUNED TO STATION B)
(TUNED TO STATION AI
Figure 13-15. Position fixed at an Intersection; course selector reading "TO"
15 DECEMBER 1984 UPDATE. FM 1-240
STATION B
111

(1) The aircraft departs station A
outbound with the course selector set on 010 degrees. The deviation indicator is
centered (on course) and the TO-FROM indicator reading "FROM" (fig 13-15, W),
(2) Prior to reaching the Blunk intersection, station B is tuned and identified (fig 13-15, X), The published radial for station B is 250 degrees, but this radial is the direction outbound from B. Since it is desirable to go inbound, the course selector is set to 070 degrees, the reciprocal of 250 degrees, The resultant reading on the TO-FROM indicator is "TO" because a course of 070 degrees will take the aircraft to station B. Station B is to the right of the aircraft from point X to Blunk intersection, but the needle deflects to the left. Since the course selector is set on the reciprocal of the published radial to produce the "TO" reading in the TO- FROM indicator, the needle deflects to
0 -
C -- -...... -- -- -- ......
the ieft, Compare with the deflection described in "b" above, The needle centers when the aircraft arrives over Biunk intersection, (fig 13-15, V), and remains centered inbound to station B
(fig 13-16, Z) after the aircraft is placed
on the 070-degree course.
d. if the aircraft in figures 13-14 and 13-15 were equipped with two VOR receivers, one would be tuned to station A to maintain the course. The other would be tuned to station B to determine the intersection. '
13-13. Courseinterceplion It is occasionally necessary to intercept a
course that is located at some distance from the position of the aircraft. Several procedures can be applied, as explained
below.
a. From a known position-45-degree or 90-degree interception. At point A in
STATION
,.,
figure 13-16, the aircraft is flying a
heading of 350 degrees while crossing the 200-degree radial. The aircraft has been cleared to intercept Victor airway 13 (V-13) which is the 1 BO-degree radial from the station. Since the position of the 200-degree radial with respect to the 1 BO-degree radial to be intercepted is
known, proceed as follows:
(1) Determine the direction of turn to intercept the 1 BO-degree radial. This can be determined by setting the course arrow on the inbound course of 360 degrees. This is the reciprocal of the published radial from the station (1 BO
degrees). With the course of 360 degrees set in the course indicator, the deviation indicator will move to the right, indicating that the V-13 airway is to the right of the aircraft.
(2) Select a heading which will intercept the desired course at an angle
0 0
>
.
B
c
Figure 13-16. Course Interception at 45 degrees or 90 degrees from a known position (VOR)
112 15 DECEMBER 19B4 UPDATE. FM 1-240

of 45 degrees. In this case, since the desired course to the station is 360 degrees, a heading of 045 degrees would intercept the course at a 45- degree angle.
NOTE: The standard interception angle is 45 degrees; however, others may be
used. II ATC requests that you "expedite," a 90-degree interception angle should be used.
(3) Turn to the selected heading and set the course arrow on the desired
course-360 degrees. (4) Tum to the inbound heading of
360 degrees when the course deviation indicator centers (fig 13-16, B). The bearing pointer of the RMI will indicate 360 degrees at this time.
(5) Use course maintenance procedures to fly to the station on V-13.
(6) Use procedure (2) above which can be changed to intercept the track at a 90-degree angle (fig 13-16, C) to reach the track in the least possible time.
b. From a known position-double- the-angle interception. The double-the- angle method of intercepting a desired course tram a known position consists of the following procedures (fig 13-17).
(1) Determine the angular difference
..
0
B
"@ ~, 0
,
"r A
A ,
... 0 " Ii!
~
'CD I 1\
between the radial on which the aircraft is presently located and the radial which
represents the desired course. At point A
of figure 13-17, the aircraft is on the
150-degree radial and the desired course to the station is 360 degrees. (This is the 180-degree radial, so the angular
difference is 30 degrees.) (2) Double the angular difference and
this will give a desirable interception angle. In this case, the interception angle will be 60 degrees.
NOTE: When using this procedure, initial
interception angles of less than 20 degrees are usually not practical. Also, an interception angle of 90 degrees is
the maximum; thus, an angle greater than 45 degrees would not be doubled.
(3) Seiect the heading which will
cause the aircraft to intercept the desired
course at the desired interception angle. In this case, a heading of 300 degrees will intercept the 360-degree course at the desired 60-degree angle.
(4) Turn the aircraft to the selected heading and reset the course selector for the 360-degree course.
(5) At the time the deviation indicator
centers (fig 13-17, B), the aircraft has reached the course. The bearing pointer
STATION
0
of the RMI will indicate 360 degrees.
NOTE: When using this technique, the leg flown to intercept (from point A to point B) is equal in length to the leg remaining to the station (from point B to the station). Consequently, the time required to fly the interception leg (point A to point B) is the approximate time remaining to fly to the station from point B.
c. Leading the needle. if the turn onto the intercepted course is delayed until
the deviation needie is fully centered, there is the risk of overshooting the
course. If the turn to the heading of the course is started too soon, the aircraft may roll out of the turn short of the course. During initial course interception
or reinterception, the technique of leading the deviation indicator must be
used. The rate of movement of the deviation indicator and the size (degree) of the interception angle must be considered in determining when to start the turn in order to place the aircraft on the course.
d. Interception of a course from an unknown position. The requirement exists to intercept a specific course at a
time when it is uncertain on which radial
0 0
0
Figure 13-17. Double-the-angle course Interception from a known position (VDR)
15 DECEMBER 1984 UPDATE. FM 1-240 113

the aircraft is located. A simple method to become oriented with respect to a
desired track is as follows: (1) Tune and identify the station. (2) Turn the shortest way from the
present heading of the aircraft to a
heading that is parallel to either the course heading or its reciprocal.
(3) Set the course selector to the
course or its reciprocal depending upon which heading the aircraft is flying.
(4) Observe the deflection of the deviation indicator. The course lies to the
same side as the indicator is deflected. The TO-FROM indicator will now indicate if the station is ahead or behind the aircraft.
(5) Turn toward the course to a
heading which will intercept the course at an appropriate angle.
NOTE: This procedure is true only when the heading of the aircraft is within 90 degrees of the course indicated by the course arrow.
13-14. Estimating time and distance to a station
a. In most situations, an aircraft will be flying in a region where two VOR stations are within reception distance. The position of the aircraft and an estimate of time and distance to either station may be determined by plotting
the course or bearing to each station on a navigation chart. The aircraft will be located at the position where the courses or bearings cross.
b. In some isolated cases, it may be
necessary to estimate the time or distance to a station by using the signal
from a single station. One technique of doing this is pointed out in the note in
paragraph 13-13b.
c. A different method is Illustrated in
figure 13-18. The aircraft is inbound to the station on the 200-degree radial. Estimating the time and distance to this station is shown in figure 13-18.
(1) Turn the aircraft through 80 degrees (left in fig 13-18).
(2) Move the course selector 10 degrees (from 020 degrees at point A to 030 degrees at point B) to a known radial ahead of the aircraft.
(3) WaiUor the deviation indicator to center and take a time check (1412:50 for example).
(4) Move the course selector an additional 10 degrees (from 030 degrees at point B to 040 degrees at point C).
(5) Wait for the deviation indicator to center and take a second time check such as 1414:55, or 2 minutes and 5
seconds elapsed during the 10-degree bearing change.
(6) Turn inbound to the station (D) and estimate the time to the station by applying the formula below. (The data is
taken from situation in fig 13-18.)
114
Time Remaining to Station = (8) Substituting the data from figure
13-8, assume the true airspeed is 120
knots. Minutes Flown x 60
Degree Change
Seconds Flown
Degree Change
Time Remaining to Station = Distance to Station =
2Min5Secx60 10'
120 x 2 Min 5 See
10 25 Nautical Miles 125 Seconds
= 12.5 Minutes 10'
NOTE: If aircraft is turned 80 degrees right (1) above), move course selector from 020 degrees to 010 degrees in (2) above and from 010 degrees to 360 degrees in (4) above.
(7) The approximate distance to the station may be estimated by using the following formula.
NOTE: Seconds must be changed to fractional or decimal parts of a minute.
d. The following iimiting factors should be kept in mind when applying the above time-and-distance formulas:
Distance to Sta tion =
True Airspeed x Minutes Flown
Degree Change
0
STATION
0 0
0
C " "
"
.1;;'" "
00 B
0
"
,
""', ,
"
.,
Figure 13-18. Estimating time and distance (VOR)
15 DECEMBER 1984 UPDATE' FM 1-240

(1) They are based on the assumption that a 1-degree angle is 1-mile wide 60 miles away from the station. This is an approximation.
(2) They do not take into account wind conditions that may cause ground speeds to vary considerably on headings which differ by 90 degrees.
(3) To determine time-distance required, the aircraft must turn so that it
will fly abeam the station during the time required for the aircraft to fly through a
10-degree change in the course selector reading.
(4) The bearing change selected (change in the course selector setting)
may vary from 5 degrees to 15 degrees. Ten degrees is used as a mathematical convenience in the above problems.
Section J II Receiver Checks
13-15. Accuracy VOR receivers and their associated indicators must be checked periodically for accuracy. There are several types of checks which can be performed to ensure equipment accuracy- In
performing these checks, current data for designated station frequencies, specific VOR radials, and station identifications are contained in current navigational publications.
13-16. Radiated test signal Equipment installed at many airports
transmits a continuous test signal receivable at any point on the airport. Although designed primarily as a ground test system, this equipment is also usable at relatively low altitudes in flight
over the airport. The procedure for using the radiated test signal VOR receiver testing facility (VOT) to check receivers is as follows:
a. Tune the frequency of the VOT. b. Listen for the proper identification,
either a continuous series of dots or a
continuous 1,020-cycle tone. c. Check for the disappearance of the
warning flag.
d. Set the course to either 160 degrees or 360 degrees.
e. Check the reaction of the TO- FROM indicator. If the course is set on 160 degrees, the indicator should read TO. If the course arrow is set on 360
degrees, the indicator should read FROM.
f. Check the course deviation indicator. II should be centered. II the needle is not centered, rotate the course selector until the indicator centers. If the course selector does not have to be rotated more than 4 degrees in order to center the needle, the equipment is
within tolerance for flight under IFR. If
the needle will not center within a 4- degree tolerance, the equipment is
. unreliable for flight under IFR. Should the VOR receiver be coupled to a radio
ma~~etic indicator, the bearing pointer will indicate 180 degrees regardless of the course selector setting.
13-17. Other ground checks Not all airports have equipment for radiated test signals. However, many airports have VOR stations situated nearby from which selected radials can be used for checkpoints. In the illustration (fig 13-19). the 120-degree radial from a station passes directly over the end of runway 27. An exact spot is
marked on this runway. The aircraft is
taxied to this spot and the receiver check is performed in the following
manner:
a. Tune to the frequency of the station.
b. Listen for the correct station identification.
c. Check for the disappearance of the warning flag.
d. Set the course selector to the specific radial for the check.
e. Check the reaction of the TO- FROM indicator. It should indicate FROM.
f. Check the course deviation indicator for a centered posflion. Plus or minus 4
degrees tolerance is allowed on the course selector setting for centering the
needle. If movement of the course selector within 4 degrees of the published radial will cause the deviation needle to center, the equipment is
usable. Equipment that does not meet these tolerance limits is unreliable for flight under IFA.
13-18. Airborne check a. At airports where radiated test
signals or other ground check radials have not been established, an airborne check radial may exist. Airborne checks are performed like ground checks except that an airborne checkpoint is specified instead of a designated spot at the
airport. For example, if a prominent water tower exists within a few miles of the
VOR STATION
VOR station, a certain radial can be selected that passes over this tower. As the aircraft flies over the tower, the accuracy of the equipment can be checked. A published airborne check over the tower may appear in
navigational publications as "KIRKSVILLE, MO-138", 8.2 NM; over water tower at La Plata; 2500'."
b. To perform the airborne check- (1) Tune and identify the Kirksville,
MO, VOR. (2) Set the course on 138 degrees
and check for a "FROM" reading. (3) Fly over the water tower described
at an altitude of 2500 feet. (4) When over the water tower, check
the deviation indicator for a centered position with a FROM indication. If the needle is within 6 degrees of center, or if
a course selector movement of 6
degrees or less from the published radial will cause the needle to center, the equipment is within tolerance. Equipment that does not meet these tolerance limits should not be used for flight under IFR.
c. The list of VOR airborne check points is published in the area planning documents (AP1, AP2, and AP3) under country listing (000 FLIP).
13-19. Dual VOR receivers If an aircraft is equipped with dual receivers, one receiver may be checked against the other. If receivers are within 4 degrees of each other, both may be considered reliable. To perform this check, do the following:
a. Tune and identify the same VOR station with both VOR receivers.
I~Oo
~.qOI.ql
Figure 13-19. Ground receiver check (VOR)
15 DECEMBER 1984 UPDATE. FM 1-240 115

b. Using dual course indicators, rotate the course selectors of each until the deviation indicator is centered.
c. Check to determine that the TO- FROM indicators on each instrument are in agreement.
d. Check the course settings. These seltings must be within 4 degrees of each other. If receivers do not meet these limits, one or both are unreliable. Each will have to be checked with a VOT or a ground checkpoint to determine if it is within the allowance tolerance for flight under IFR.
13-20. Unpublished receiver check In a location where no receiver checks are published, a checkpoint from a
nearby VOR station may be established. To accomplish an unpublished receiver check, do the following:
a. Select a VOR radial that lies along the centerline of an established VOR airway.
b. Select a prominent ground paint along the selected radial, preferably more than 20 nautical miles from the VOR ground facility and maneuver the aircraft directly over the checkpoint at a
reasonably low altitude.
c. Note the VOR course indicated by the receiver when over the ground point.
The maximum permissible variation between the published radial and the indicated course is 6 degrees.
13-21. Course deviation Indicator sensitivity check At the same time that the VOR receiver is checkec for accuracy, the deviation indicator can be checked for sensitivity. The face of the course indicator (fig 13-20) is graduated in 2-degree intervals. Moving from center to either side, the edge of the small circle is 2
degrees and each dot (aligned horizontally) represents 2 degrees. When the deviation indicator is fully deflected to one side, the aircraft is off the selected course by at least 10 degrees. Consequently, if the receiver is checked for a centered indicator with the course selector set on a given radial (for
example, 140 degrees) (fig 13-20, A), a
full swing of the indicator can be checked by setting the course selector on 130 degrees (fig 13-20, B) and then on 150 degrees (fig 13-20, C). Normally, a 1 O-degree change in the course selector setting will cause a full scale movement of the course deviation indicator. However, in all cases a full- scale swing (10 degrees) should require
no more than an 8- to 12- degree movement of the course selector.
NOTE: Pertinent information for VOR receiver checks shouid be verified from current navigationai publications and reguiations. This information is subject to change. 116
Section IV VOR station classification
SectiQI'I V Area Navigation
13-24. Components Area navigation (RNAV) allows the
aviator to fly a selected course to a
predetermined point without the need to overfly ground-based navigation facilities. RNAV systems include doppler radar, inertial navigation system (INS), very low
frequency, and the course line computer. The course line computer is the RNAV system that the Army aviator is most likely to use.
13-22. Classes The classes of VOR stations are as follows:
a. T (Terminal). (T) VOR. b. L (Low Altitude). (L) VOR.
c. H (High Altitude). (H) VOR.
13-23. Classification by reception capabilities Stations are also classified by their jnterference~free reception capabilities with respect to distance and altitude. This classification is the basis for establishing the interference-free reception range of transmitter frequencies. The following data shows station classification with normai usable radial distances and altitudes:
ClassIfication: T (Terminal)
Altitude and Range Boundaries: From 1000 feet above ground level (AGL) up to and including 12,000 feet AGL at radial distances out to 25 NM.
Classification: l (Low Altitude)
Attitude and Range Boundaries: From 1000 feet AGL up to and including 18,000 feet AGL at radial distances out to 40 NM.
Classification: H (High Altitude)
Altitude and Range Boundaries: From t 000 leet AGL up to and including 14,500 leet AGL at radial distances out to 40 NM. From 14,500 feet AGL up to and including 60,000 feet at radial distances out 10
100 NM. From 18,000 feet AGL up to and including
45,000 feet AGL at radial distances oullo 130 NM.
NOTE: Classification of stations is subject to change. Current operational publicationsshouid beconsul1ed for latest Information.
. .
.
A
LEFT RIGHT . . . .
100 80 60 40 20 . . . .
20 40 60 80 100
0 0
CENTERED NEEDLE
0 0
B C
- -
Figure 13-20. Course deviation Indicator sensitivity chec_k
15 DECEMBER 1984 UPDATE. FM 1-240

13-25. Operallon The course line computer is based on azimuth and distance information generated by the present VORTAC system. It is also called the "Rho.Theta" system. Rho (distance) is derived from the distance measuring feature of the VORTAC and Theta (bearing) information is derived from the azimuth feature. As shown in figure 13-21, the value of side (A) is the measured OM E distance to the VORTAC. Side (B), the distance from the VORTAC to the waypoint, and angle (1), the bearing from the VORTAC to the waYPoint, are set in the cockpit control. The bearing from the VORTAC to the aircraft, angle (2), is measured by the VOR receiver. The airborne computer compares angies (1) and (2) and determines angle (3). With this infonmation, the computer, by means of simple trigonometric functions, continuously solves for side (C), which is the distance in nautical miles and magnetic course from the aircraft to the waypoint. This is presented as guidance information on the cockpit display.
13-26. Waypolnts A waypoint is defined as a
predetermined geographical position
used for route-definftion or progress- reporting purposes that is defined relative to a VORTAC station position. Waypoints are also defined by latitude and longitude coordinates for the use of airborne self -contained systems not dependent on VORTAC inputs. Wfth the course line computer, the aviator effectively moves or off-sets the VORTAC tn a desired location. A "phantom station" is created by setting the distance (Rho) and the bearing (Theta) of the waypoint from a
convenient VORTAC in the appropriate windows of the waypoint selector or "off- set control" (fig 13-22).
13-27. RNAV routes The advantages of the VORTAC area navigation system stem from the ability of the airborne computer to, in effect, locate the VORTAC wherever convenient if ft is within reception range (fig 13-23). A series of these "phantom stations" or waypoints make up an RNAV route. A number of RNAV routes have been established in the high altitude structure. High altitude R NAV routes are depicted on the "RNAV Enroute High Altitude Charts." In addition to the published routes, the aviator may fly a random RNAV route. under IFR if it is approved by ATC. RNAV Standard Instrument Departures (SI08) and Standard Terminal Arrival Routes (STARs) are contained in the SID and STAR booklets.
8/'" IS)
~~ WAY POINT
(CJ
Figure 13-21. Course line computer geometry ,
Figure 13-22. Waypolnt selector or "off-set control"
. '\ , ~... ~' .. .
. .
. .
. .
. .
. ,
, .
, .
""Æ WAY POINT' .
"
, .
"
, ,
,
Figure 13-23. Alrcraft/VORTAC/waypoint relationship 15 DECEMBER 1984 UPDATE. FM 1-240 11ï

13-28. RNAV approaches RNAV approach procedure charts are
also available. Waypoint identification
boxes contain the following information:
waypoint name, coordinates, frequency, identifier, radial-distance (facility to
waypoint), and reference facility
elevation. The initial approach fix (IAF),
final approach fix, and missed approach point are labeled. Since these are
non precision approaches, minimums
appropriate to such approaches apply.
Chapter 14 Automatic Direction Finder (AD F)
and Manual Loop Procedures
14-1. General The radio direction finder (RDF), sometimes referred to as a radio
compass, is a radio receiver. It is used to
determine the bearing to a radio
transmitter from the aircraft. This
receiver has a loop antenna that is used to determine this bearing. Sometimes the
loop antenna is placed in the signal
pattern of a radio transmitter. If so, no , signal will be heard when the plane of I
the loop is perpendicular to a line from the aircraft to the transmitter. This position of the loop is called the .null.
0 Navigation with the radio direction finder
i uses the null for determining the
i direction to the trensmitting facility. This 0
can be done manually by using the ADF or loop procedures.
Section I
Characteristics and Components
14-2. Receiver spectrum The Army uses several different
receivers, usually referred to as ADF
receivers, for radio direction finding. The
frequency spectrum of these receivers is
from 0.19 megahertz (190 kilohertz) to
1.75 megahertz (1,750 kilohertz). In this
frequency range are the nondirectional radio beacon (NDS) and the low/medium frequency radio ranges.
14-3. Classification
a. Classification and usable radii of
NDSs are as follows:
Nondirectlonal RadIo Beacon Uøable RadII
Class
(LI ..
MH..
H... HH.
Power (watts)
.. .Under 25 .
. .Under50... ." .50 - 1999..... . . . .2000 or more
Distance (nautical miles (NM))
..15
. .25
. .50 . .75
NOTE: Service range of Individual facilities will be less then
stated when flight is conducted at low altitudes
118
b. For navigating by RDF, it is best to
use nondirectional radio beacons. These beacons are listed in flight information publications and are designated on air navigation charts. They are designed and maintained for air navigation. For best
results, they should be used only within
the usable distances as listed in the
chart above. If the airborne RDF receiver
and associated equipment are not
operating at their optimum level, the
usable distances may be further reduced. Radio beacons are sometimes subject to
fading signals and signal interference
from distant stations at night. During
periods of thunderstorm activity, the atmospheric static may interfere with
tuning and identifying a radio beacon. This will cause erratic operation of the
bearing needle. Commercial broadcast
stations should be used only if an NDS is
not available. These stations have irregular hours of operation and are subject to signal interference from other
stations. Identification is not broadcast at
frequent or regular intervals. The stations also frequently have highly directional signal patterns that may cause umeiiable indications while using ADF procedures. If a commercial broadcast station must
be used, select a station that is
designated on an air navigation chart.
14-4. Receiver components Components of an ADF receiver are as follows:
a. Receiver. b. Loop antenna.
c. Sensing ,antenna. d. Radio control panel.
e. Indicator to solve RDF problems for navigational purposes. The most
commonly used indicator, the radio magnetic indicator (fig 14-6), has a
rotating compass card. This card dispiays the magnetic heading of the
aircraft under the index at the top of the dial and needles or bearing pointers. When the signal from an ADF receiver is
switched to one of these needles, it will align itself on a heading on the compass
card. This heading will correspond to the magnetic course to the station being
received.
Section II Automatic Direction Finder Flight Procedures
14-5. Orientation procedure
a. The RMI function switch is set to the ADF position. This will cause the number 1 bearing pointer to respond to the signals from the ADF receiver. The receiver is set and the desired radio
15 DECEMBER 1984 UPDATE' FM 1-240
station is identified. The receiver should
be tuned to receive the strongest signal
possible. This is accomplished by adjusting a tuning meter to its greatest sensitivity or by determining the best audio signal with the ear. Weak reception or off-frequency tuning of a signal will
cause the bearing pointer to either fluctuate or indicate an incorrect magnetic bearing to the station. Correct tuning of the receiver may be made difficult by atmospheric static being
received. Sy switching to the antenna position on the receiver, a clearer signal
can be received for tuning using the audio signal. When using this procedure, be sure and switch back to COMP/ADF position after tuning is completed. The response of the bearing pointer to the signal may be tested by moving it left or right on the RMI with the LOOP switch. This is to determine if it will return to the original bearing when the LOOP switch is
released. After tuning the radio receiver and identifying the station, the function switch on the radio control panel is in the
COMP / ADF position. Also, the RMI function switch is in the ADF position.
b. If the ADF is being used as the primary means of navigation, the receiver volume should be adjusted. It should be adjusted so that the signal is just barely
audible. Then, if the signai is no longer heard, it is possible that the receiver has failed. The receiver itself and the RMI
have no warning devices to indicate
failure. The bearing pointer may remain in what appears to be a normal operating position and a failure is not detected until
changing the desired course. During
flight in heavy precipitation or near a
thunderstorm where iightning is
occurring, the indication of the bearing
pointer may become erratic. It may become so erratic that accurate navigation cannot be accomplished. If
the flight is being conducted under IFR, ATC should be advised that the flight
cannot be continued using the ADF receiver as the primary means of navigation. The bearing pointer always indicates the magnetic bearing to the
station. If the requirement exists to
proceed to the radio station, the aircraft should be turned toward the bearing pointer until it is aligned with the index at
the top of the RMI. "Homing"
procedures to the station can be used by keeping the bearing pointer aligned with
the index. A track maintained to the
station along a desired course, applying
wind drift corrections, is another "homing" procedure. Using homing, the
aircraft will fly a curved track to the
station if any crosswind exists (fig 14-1). When maintaining a desired course, the
aircraft's ground track to the station wili be a straight line (fig 14-2). ATC
clearances thai specify "direct" to a
named radio facility require that a direct
course be maintained to that facility.

~
~~r j~
\J;j
Figure 14-1. Homing (ADF)
. STATION
t
.... 1) t; ~
~
Figure 14-2. Maintaining a course to a station (ADF)
15 DECEMBER 1 984 UPDATE. FM 1-240
1 <H;. Courses to a station The procedures for maintaining a course to a station are illustrated in figure 14-2. These procedures are outlined as follows:
a. Posit,on A. At position A, the aircralt is on course with the bearing pointer aligned with the heading index. The magnetic course is 350 degrees.
b. Position B. At position B, the bearing pointer is deflected 5 degrees to the left of the course, indicating that the aircralt has been blown to the right of course. To return to the course, a drilt correction must be applied to the lelt of the aircralt heading. This initial cOrrection should be 20 degrees for aircralt flying an airspeed of 90 knots or above. The correction should be 30 degrees for aircralt flying at airspeeds below 90 knots. If these corrections do not readily bring the aircralt back to course, larger corrections may be used.
c. Position C. At position C, 20 degrees lelt cOrrection has been applied to a heading of 330 degrees. The bearing pointer will continue to indicate 5 degrees lelt drift throughout the turn.
d. Position D. At position D, the aircraft has returned to course. The bearing pointer indicates the magnetic heading of the desired course.
e. Position E. At position E, the heading of the aircraft is 340 degrees. One-half of the drift correction has been removed. This heading should compensate for the wind effect and allow the aircraft to remain on course. If this correction is too much, the aircralt will fly off course to the left. To COrrect for this condition, the aircraft is returned to the heading of the desired course. Then the aircraft is allowed to (,kilt back on course (bearing pOinter reads 350 degrees). When on course, apply less drift cOrrection than before and determine if the aircraft will remain on course. These procedures will be followed untii a heading has been determined that will maintain the aircraft on course.
14-7. Station passages Passage of the station will be indicated by the bearing pointer moving from the magnetic heading of the course to a
magnetic heading. The magnetic heading is the reciprocal of the course. If the aircraft passes directly over the stalion, the bearing pointer will rapidly reverse its position as stated above. If the aircralt passes to one side of the station, the bearing pointer will move more slowly and give an indication on which side the station is being passed. As the aircralt passes the station, the bearing pointer will move to a magnetic bearing which is somewhere near the reciprocal of the course. For timing purposes, station
11~

passage occurs when the bearing pointer
passes through a position 90 degrees to the desired course.
14-8. Courses from a station When maintaining a course from a
station, the bearing pointer will be indicating a magnetic bearing which is
the reciprocal of the course. This
indicates that the aircraft is flying away from the station. Sometimes the bearing
pointer later begins to point to a
magnetic bearing which is to the left of the course reciprocal. If this occurs, the
aircraft has been blown to the right of the course by the wind. The aircraft can then be returned to the course and the
course maintained by using the
procedures described in paragraph 14-6. The tail of the bearing pointer may be used to determine the position of the
aircraft in relation to the desired course. However, it is nondirectional and
corrections must be made in the opposite direction to the tail of the
needle.
14-9. Identification of fixes While maintaining a course, a
I
requirement may exist to determine a fix
which is located along that course. This
may be an intersection on an airway chart, an approach chart, or some point
: along the course requested to be identified by ATC. At times, another navigational receiver, VHF omnidirectional renge, or instrument landing system is being used to maintain
! the desired course. When this occurs, I the ADF receiver may be tuned to the , low or meriium frequency station from
which the reporting point is to be ! identified. In figure 14-3 the aircraft is
maintaining a course of 090 degrees. The fix is formed by a course to the
beacon of 120 degrees and the present course of 090 degrees. When the bearing pointer indicates a magnetic bearing of 120 degrees, the aircraft is
over the fix. For position fixing when the ADF is being used to maintain a course, two ADF receivers may be required. Or, alternate tuning of the one receiver from
one station to the other is required. This procedure is necessary to ensure that the aircraft does not drift off course while identifying the fix.
14-10. Interception Inbound Course interceptions inbound to a station
are illustrated in figure 14-4. At point A, the aircraft is maintaining a course of 050 degrees to the beacon. A
requirement arises to intercept and track inbound on a course of 080 degrees.
Visualize that the 080-degree course is
to the left or .use the parallel method of determining the position of the aircraft in
relation to the 080-degree course. Using the paraliel method, the aircraft is turned to a heading of 080 degrees. The bearing pointer is observed to the left of
120
the aircraft heading. This means that the
080-degree course is to the left. The standard interception angle (45 degrees) is applied and a ieft turn to a heading of 035 degrees is made. A smaller interception angle may be used if the
difference between the present course and the desired course is 20 degrees or
less. A smaller interception angie may be used when the position of the aircraft is
known to be close to the station. When these conditions exist, the intercept angle should be double the difference
between the courses so as to ensure course interception without deiay. When the bearing pointer approaches the bearing of 080 degrees, a turn to this heading should be made, adjusting the
degree of bank so as to roll out on the inbound course (point B). Determination of when to start this turn will be based
on the following factors:
a. Movement speed of fhe bearing
pointer. A rapid movement of the bearing pointer means that the aircraft is close to
the beacon. The turn must begin prior to
the bearing pointer's reaching the desired course. A delay will result in
overshooting the desired course. A siow movement of the needle requires that the turn to course be del eyed untii the bearing pointer is close to the desired
course. b. Speed of the aircraft. The speed of
the aircraft requires that the turn be delayed or started sooner. This is to avoid undershooting or overshooting the desired course.
c. Angle of intercept. Large angles of intercept require that the turn be started earlier than for small angles. Once the
aircraft has rolled out of the turn, the procedures for maintaining a course as outlined in paragraph 14-6 will be followed.
15 DECEMBER 1984 UPDATE' FM 1-240

. . . .
8 AIRWA Y
0900 ..
STATION C
Figure 14-3. Position Ilxlng (ADF)
~ tr;"l'''' .,,-:;. ~ "'~ :~ ,;~;.:-
B ~.~ / '>'
"-':"~~..!~"~'~:-:
BEACON
-
0800- -
~.;!; <<':"'1;');'1' 'I., f:' i' (~,., -.
=0- ...: A -" .
.~ 'It .:;:>
"'",," \1.",.:)1 "",1.,,1'
A
INBOUNO WITH STATION 460 RIGHT OF NOSE AT TIME OF TRACK INTERCEPTION. HEADING 103S") PLUS INTERCEPTION ANGLE 10460) EQUALS DESIRED INBOUND TRACK 1lIIIO").
Figure 14-4. Course Interception Inbound (ADF)
15 DECEMBER 1964 UPDATE 'FM 1-240 121

14-11. Interception outbound In figure 14-5, the aircraft at point A is
maintaining a course of 230 degrees
from a beacon. The requirement arises to intercept and maintain a course of 260 degrees from the beacon. Either the
visualization or the parallel method discussed in paragraph 14-10 can be
used to determine the direction of turn to
intercept the desired track. If the parallel
method is used, the aircraft is turned to a
heading of 260 degrees. The bearing pointer indicates to the right of the
reciprocal of the desired course (080 degrees). To intercept the 260-degree course, the aircraft is turned to a heading
of 305 degrees (45-degree intercept
angle). When the bearing pointer
approaches the reciprocal of the course (bearing of 080 degrees). a turn is begun
to roll out on the 260-degree course from the beacon (point B). Determination of when to start this turn may be made using the factors set forth in paragraph
14-10. After the turn has been completed, the procedures for maintaining a course, as outlined in
paragraph 14-6, will be followed.
14-12. Time and distance from an ADF station To compute the time and distance to an
LIMF station. the station is tuned and identified. Also, the aircraft is turned until
the bearing pointer is displaced 90
degrees to the aircraft heading (90
degrees index of the RMI). The time is
noted and this heading is maintained.
When the bearing pointer moves 10
degrees frem the 90-degree index. the
time that has elapsed is noted and the
following formulas apply:
Time in seconds between bearings Ti~e in f = mmutes rom
Degree o! bearing change the station
EXAMPLE:
120 seconds
10. 12 minutes from the station
EXAMPLE:
120 seconds
-- x 12 = 24 NM from the station
60.
A VB
-~ ~. -c/$O~('
BEACON 0
---
122
Figure 14-5. Course interception outbound (ADF)
15 DECEMBER 1984 UPDATE .FM 1-240

Section III Automatic Direction Finder Flight Procedures Using Relative Bearings
14-13. Relative bearing When the slaved gyro compass of the RMI system fails and the LIMF radio station is the only navigational aid (NAVAIO) available, AOF procedures using relative bearings must be used. For the purpose of this section, it will be assumed that the compass card remains motionless (referred to as "fixed card"). The card has the figure of 060 degrees under the index at the top of the RMI. The pos~ion of the bearing pOinter will no longer indicate a magnetic bearing. The indication of the bearing pOinter will be read in relation to the index at the top of the RM I. The index represents the nose of the aircraft. For this reason, the bearing is called a relative bearing. The relative bearing to the L/MF station is measured clockwise. from the nose of the aircraft to the position of the bearing pointer. Also called a reiative bearing, the position of the bearing pointer may be referred to as being so many degrees left or right of the nose. For exampie, a relative bearing of 270 degrees may be referred to as a bearing of gO degrees left of the nose of the aircraft. I n figure 14-6, the relative bearing to the beacon at positions A, B, and C is 060 degrees. The beacon is 60 degrees right of the nose of the aircraft. To determine the magnetic course to the beacon from each position, add 60 degrees to the
G1GIJ
ø (0 CLJ
B
magnetic heading of the aircraft as read from the magnetic compass.
14-14. Orientation (fixed card) The procedure for AOF orientation using relative bearings is as follows:
a. The station is tuned and identified. b. The number of degrees the bearing
pointer is deflected to the right or to the ieft of the nose of the aircraft is determined from the RMI.
c. If the bearing is to the right of the nose, the number of degrees determined in b above is added to the aircraft heading. This is to determine the magnetic course to the station. If the bearing is to the left of the nose, the number of degrees determined in b is subtracted from the aircraft heading. This is also to determine the magnetic course to the station.
14-15. Station passage (lixed card) Station passage is indicated by a
movement of the bearing pointer from its position at the index at the top of the RMi (if homing). Otherwise, it is indicated from its position at or near that index (if maintaining a course) to the reciprocal of that position.
C N
~o- 0 BEACON
\ '" .. 00
[ïiliJ Figure 14-6. Relative bearing 01 060 degrees with three dlflerent aircraft headlnga
15 DECEMBER 1984 UPDATE oFM 1-240 123

14-16. Courses to a station (fixed
card) The procedures for maintaining the
course to a station using relative
bearings are illustrated in figure 14-7. These procedures are outlined as
follows:
a. Point A. The aircraft is inbound to
the station on a course of 350 degrees, the heading is 350 degrees, and the
bearing pointer is indicating a O-degrees relative bearing.
b. Point B. Wind from the left has
caused the aircraft to drift off course to
the right. The bearing pointer indicates a
5-degree bearing to the ieft of the nose. The course is now 5 degrees to the left.
c. Point C. To return to the course, 20
degrees of ieft correction must be appiied. The new heading is 330
degrees. The bearing pointer indicates a
bearing of 015 degrees to the right of the
nose of the aircraft.
d. Point D. The aircraft has returned to
the course when the bearing pointer
indicates a bearing of 20 degrees to the
right of the nose. e. Point E. The aircraft is turned right
to a heading of 340 degrees (drift
correction of 10 degrees has been applied). (The bearing pointer indicates 10 degrees has been applied.) The bearing pointer indicates 10 degrees to
the right of the nose. if the bearing
pointer remains in this position, the drift
correction is sufficient and the aircraft will remain on course. If not, further
corrections to course will have to be
made and different drift corrections must
be applied until the course is maintained.
14-17. Homing Homing when using relative bearings is
done in the same manner as described in paragraph 14-5. The aircraft is turned until the bearing pointer is aligned with
; the index at the top of the RMI. The I aviator liies to the station by turning the
aircraft as necessary to keep the bearing
pointer on the nose of the aircraft.
124
E
...
.:"1'..' .. -I'...
,.~ \~.. C
lli!:iJ
IWINþ
OIW
:::.::~<: BeACON
...
D
,~
A
Figure 14-7. Maintaining a course to a station (fixed card)
15 DECEMBER 1984 UPDATE. FM 1-240

14-18. Courses from a station (fixed card) The procedures for maintaining a course outbound are illustrated in figure 14-8. These procedures are outlined as follows:
a. Point A. The aircraft is outbound from the station on a course of 350 degrees, and the aircraft heading is 350 degrees. Also, the bearing pOinter is indicating a relative bearing of 180 degrees from the nose of the aircraft. On the lower heading index of the RMI, the taii of the aircraft is considered.
b. Point B. Wind from the left of the course has caused the aircraft to drift to the right of the course. The bearing pointer indicates a position 5 degrees to the ieft of the tailor lower index on the RMI.
c. Point C. A 20-degree heading change to the left is applied. The heading is 330 degrees. The bearing pointer indicates a bearing of 25 degrees to the left of the tail.
d. Point D. The aircraft has returned to the course when the bearing pOinter indicates a bearing of 20 degrees to the left of the tail.
e. Point é. The aircraft Is turned to a heading of 340 degrees (drift correction of 10 degrees has been applied). The bearing pointer indicates a bearing of 10 degrees to the left of the tail. If this drift correction is sufficient, the bearing pointer will remain in this position and the aircraft will remain on course. If not, further corrections to course will have to be made and different drift corrections will have to be applied until the course is maintained
NOTE: Maintaining a course from a
station can also be accomplished using the tail of the bearing pointer. However, the tail of the bearing pointer is nondirectional and corrections must be made in the opposite direction to the tail of the bearing pointer.
.
~ c.:t UO
q, WIW
CJIlJ v
BEACON
Figure 14-8. Maintaining a course from a station (fixed card)
15 DECEMBER 1 984 UPDATE. FM 1-240 125

14-19. Positions (fixed card)
The procedures for determining a fix are
illustrated in figure 14-9. The aircraft is
maintaining a course of 090 degrees.
The ADF receiver is tuned to the
beacon. A fix must be identified where
the 120-degree course to the beacon
crosses the 090-degree course. The
aircraft will be at this position when the bearing pointer indicates 30 degrees to
the right of the nose (120 degrees - 90
degrees ~ 30 degrees difference
between the two courses). When drift
correction is required to maintain a
126
course. the heading of the aircraft will
always be used to determine the relative
bearing to a fix. Example: The heading of
the aircraft is 080 degrees (10-degree drift correction to the left) and is
maintaining a 090-degree course. When the fix is reached. the bearing pointer will
indicate a position of 40 degrees to the
right of the nose (120 degrees - 80
degrees = 40 degrees). In the same
example. a 10-degree right drift
correction will result in the bearing
pointer indicating 20 degrees right of the
nose at the fix (120 degrees - 100
degrees ~ 20 degrees).
lDLJ ~
0900
~ 300
I~ ,/ 00
~
~
BEACON
Figure 14-9. Position fixing (fixed card)
15 DECEMBER 1984 UPDATE' FM 1-240

14-20. Interception Inbound (fixed card)
The procedures for course interception to a station are illustrated in figure
14-10. These procedures are outlined as tollows:
a. Point A. At point A, the aircraft is
inbound to a beacon on a course ot 050 degrees. The aircraft heading is 050
degrees and the bearing pOinter is indicating a zero-degree relative bearing. The requirement exists to intercept a
course of 80 degrees to the beacon. The 80-degree course can be visualized to the ieft. Or, it can be determined by turning the aircraft parallel to a heading of 080 degrees and noting that the bearing pointer is indicating a bearing to the left of the nose. Since there is a 30-
degree difference between the two courses. a 45-degree intercept angle is applied. The aircraft is turned left to a heading of 035 degrees.
b. Point B. At point B, the aircraft has intercepted the 080-degree course. The bearing pointer indicates a bearing of 045 degrees to the right of the nose of the aircraft. The turn to course must be started before the bearing pOinter
-
0800 -
QLJ 'Y
~ Q ~(/ -<,,'\ 6
~", A 1.,,- ",'/} ;~ ..'"- :--1") Lit-:- =." -
'So ~.:;- ",#, "
Figure 14-10. Course Interception Inbound (fixed card)
15 DECEMBER 1984 UPDATE. FM 1-240 127

reaches the 045-degree bearing. (See
para 14-10 for a discussion of how to
plan a turn to intercept a course.)
14--21. Interception outbound (fixed
card) The procedures for interception of a
course from a station are illustrated in
figure 14--11. These procedures are
outlined as follows:
8. Po;nt A. At point A, the aircraft is
maintaining a course of 270 degrees
from the station. The aircraft heading is
270 degrees and the bearing pointer is
indicating a relative bearing of 180
degrees. The requirement exists to
intercept a course of 300 degrees from
the station. The parallel or visuai method
can be used to determine the direction
of the 300-degree course from the 270- degree course. On a heading of 300
degrees, the bearing pointer will indicate
to the right of 240 degrees or tail of the
aircraft. The 300-degree course is to the
right of the present position of the
aircraft. To intercept the desired course of 300 degrees, the aircraft must be
turned to the right to a heading of 345
, degrees (300-degree course + 45- , degree intercept angle).
b. Point B. At point B, the aircraft has intercepted the 300-degree course. The bearing pointer indicates a bearing of
045 degrees to the right of the 180-
degree index or tail of the aircraft. The
turn to course must be started prior to
the bearing pointer reaching the 045- degree bearing. (See para 14-10 for a
,~/\ ~c~~ i9.s'~
~ ~ \
'III 270 . COURSE
discussion of how to plan to intercept a
course.)
14-22. Determination of time and
distance from a station (fixed card) The procedures for determining the time
and distance from a station using a fixed
compass card are the same as those set
forth in paragraph 14-12. This paragraph
provides the time and distance formuias.
Section IV Manual (Loop) Operation of the ARN- 59
14-23. Operation The radio compass may be operated
manually for navigational use with the
seiector switch in the LOOP position.
Manual operation may be necessary
when the signai or indicator readings
received in the COMP position are
unreliable.
a. Navigationa; procedures. Naviga- tional procedures are the same in the LOOP position as when using the COMP
position. However, the azimuth indicator
is positioned manually by the loop drive
switch to locate the null by sound. If the switch is moved to the right, the indicator
arrow moves to the right (clockwise). if
the switch is moved to the left, the indicator moves to the left (counterclockwise). An aural null (minimum reception) results when the
plane of the loop antenna is
perpendicular to a line from the beacon.
B GYm
e STATION
Figure 14-1-1. Course inter-ceptionoutbound (fixed card)
128 15 DECEMBER 1984 UPDATE. FM 1-240
b. BFO. Certain types of radio
beacons transmit an interrupted, but
unmodulated radio carrier wave, which is
inaudible unless the BFO switch is
turned on. The beat frequency oscillator
converts the inaudible carrier wave into
an audible sound. On some ADF
receivers, the BFO switch is labeled
"CW." Other radio beacons transmit a
continuous repetition of the identifier
code or transmit a tone interrupted at
intervals by the identifier code. These beacons are difficuit to identify in manual
ioop operation unless the BFO is turned
to the ON position. The BFO will
combine with the incoming signai and
produce a continuous audible tone. This
will aid in determining the nuil by
ensuring a better signal. Therefore, the
BFO switch must be on during all manuai
loop operations.
14-24. Orientation There are orientation procedures used in
determining the direction fa the radio
transmitter. These procedures are explained beiow.
a. The radio beacon is tuned and identified in the ANT position. If it is
difficult to identify the beacon, the switch
should be moved from the antenna to
the loop position to receive the identifier.
If it is not heard, the loop is rotated with
the loop drive switch until the identifier is
heard. The loop may have been in the
null position when the receiver was switched to LOOP. The reception of the
station being tuned may be improved by
turning on the BFO switch. Best reception is attained by moving the tuning dial slowly back and forth. This is
done over the station frequency until the
position is located where the lowest pitched tone is heard. The monotone or aural signal caused by the BFO will be
heard on either side of the highest tone.
b. The selector switch is moved to LOOP if the selector switch is not already positioned in this mode.
c. The loop drive switch is moved and
the signal is heard. At some point, the
signai will fade at the null position. As
the aviator rotates the azimuth indicator,
the signal will build on each side of the
null position. Ideally, the null should be
no more than 5 degrees wide on the
face of the azimuth indicator. For
example, if the signal begins to fade when the indicator reaches 120 degrees
and immediately builds up again at 125
degrees, the null is reasonably narrow. After the null is located, the azimuth

indicator points toward the beacon, but the indication is ambiguous. As an example, the correct relative bearing may be at either end of the indicator. II the null is more than 5 degrees wide, the volume is increased with the volume control until the null is 5 degrees wide. If the null is too narrow or cannot be definitely located, the volume is
decreased.
d. The loop is manually rotated until the bearing pointer indicates 090 degrees or 270 degrees from the nose of the aircraft to resolve the ambiguity. The aircraft is turned right or left until the signal again fades to a null. The beacon is then either to the left or to the right of the aircraft. A constant heading is maintained while using the loop drive switch to maintain the null position. II the loop (bearing pointer) is rotated to the right to maintain the null, the beacon is to the right (clockwise) of the aircraft. If rotated to the left to maintain the null, the beacon is to the left of the aircraft. (Procedures for resolving ambiguity are illustrated in fig 14--12.)
(1) Point A. At point A, the aural null is received on a compass heading of 270 degrees, with the bearing painter in the O-degree to 180-degree position. The beacon is either directly ahead of or behind the aircraft.
(2) Point B. At paint B, the bearing pointer is rotated to the 090-degree/270- degree (wingtip) position, which causes the signal to rebuild.
(3) Point C. At point C, the aircraft is turned until the null reappears at the wingtip position (heading zero degrees). This indicates that the beacon is either to the left or right of the aircraft. This
heading is flown for a short time and the signal rebuilds. This indicates that the aircraft has flown out of the wingtip null.
(4) Point D. The null is relocated at point D by rotating the bearing pointer clockwise to 110 degrees. Therefore, the beacon is at point X, 110 degrees right of the aircraft heading of zero.
14-25. Null Aural null tracking procedures are identical to those used for ADF tracking. In this instance, however, the loop must be manually rotated to determine the null position and relative bearing. In tracking toward or away from a beacon (null at 0 degrees or 180 degrees), drift is indicated by movement of the null. The null moves either to the left or right of the nose or tail position. For example, if the aircraft drifts off course to the left, a
20-degree heading correction may be made to reintercept the null. Procedures are as follows:
a. With the heading indicator, there is a turn of 20 degrees right to intercept the course. The indicator (loop) is set to 20 degrees left of the nose.
b. The same heading is continued until the null reappears at this new setting (20 degrees left of nose). Aircraft is back on desired course.
c. There is a turn back toward original heading by 10 degrees and the null indicator is relocated 10 degrees left of nose.
d. If correction of 10 degrees is
excessive or inadequate, make additional corrections of 5 degrees.
NEEDLE MOVED TO RIGHT- NULL LOCATED AT110"
14-26. Determination of time and distance from a station To compute the time and distance to an LlMF station, the station is tuned and identified and the bearing pointer is
placed on the 90-degree or 270-degree position with the loop switch. The aircraft is turned until the null is located. The time is noted and this heading is
maintained. The loop is moved and kept in the null position as the aircraft continues to advance. When the bearing pointer has been moved 10 degrees, the elapsed time is noted and the formulas are applied from paragraph 14-12.
14-27. Beacon
a. Homing to a beacon with the receiver operating in the lOOP position is accomplished by first locating the beacon (para 14-24). Then the aircraft is
turned until the null is on the nose position. If the aircraft drifts out of the null position, the direction of drift is then determined. Determination is by rotating the bearing pointer left or right to relocate the null (para 14-24d). The aircraft is turned unfil the null is again on the nose position. This procedure is repeated until in the immediate vicinity of the beacon.
b. Determining arrival Over the beacon are the following:
(1) The time of arrival is estimated accurately.
(2) Prior to arrival, the bearing painter is set on the wingtip position (090 degrees to 270 degrees) with the loop drive switch to receive a strong signal.
e e BEACON COULD
BEACON Y .
BE HERE 1
X
B A AIRCRAFT TURNS
UNTIL NULL IS NULL IS SO" TO THE NOSE LOCATED
Figure 14-12- Resolving ambiguity (loop)
15 DECEMBER 1984 UPDATE. FM 1-240 129

(3) As the aircraft flies over the
beacon (or abeam the beacon), a sharp
null of short duration will be detected.
Chapter 15 Tactical Air Navigation (TACAN)
15-1. General Although VOR was a great improvement
over earlier navigational systems, a gap still existed in the information availabie
when navigating. The TACAN system
was developed to fill this gap by
providing information needed for precise
geographical fixing of the aircraft's position. In addition to the dispiayed
bearing information, TACAN adds a
continuous dispiay of range information.
Like VOR, TACAN provides 360 courses radiating from a station. Distance measuring equipment (DME), an integral
part of TACAN, provides continuous
slant-range distance information. An
additional advantage is that TACAN
ground equipment is compact and
relatively easy to transport. This provides
great versatility in beacon installation and
mobility. Stations that have VOR and
TACAN systems collocated are called
VORTAC stations.
15-2. Frequencies and ground equipment
a. Frequencies. TACAN operates in
the UHF (1,000 megahertz) band with a
total of 126 two-way channels in the
operational mode (X or V). The DME air. to-ground frequencies for these channels
are in the ',025 to 1,150 megahertz
range and the associated ground-to-air
frequencies are in the 962 to 1,213 megahertz range.
b. Ground equipment. TACAN ground
equipment consists of a rotating type antenna for transmitting bearing
information and a receiver~transmitter (transponder) for transmitting distance
information. The TACAN station is
identified by an international Morse- coded tone modulated at 1,350 hertz
with a reception interval of approximately
30 seconds. Permanent TACAN ground
stations are usually dual transmitter
equipped (one operating and one on standby), fully monitored installations
which automatically switch to the
standby transmitter when a malfunction
occurs. The ground monitor, set to alarm
at any radial shift of plus or minus 1
degree, is usually located in the base
control tower or approach control and
sets off a light and buzzer to warn the
ground crew when an out-of-tolerance
condition exists. Sometimes TACAN
reception might be suspected of being in
error or bearing/distance unlock
conditions might be encountered in flight.
When this occurs, the status of the
ground equipment can be checked by
calling ATC. When ground equipment is
130
undergoing tests or repairs which might
cause it to transmit erroneous signals, its
identification is silenced. Therefore, identification signals can be heard during
flight.
15-3. Signal pallerns The signal pattern for bearing information
is formed by varying the nondirectional
pattern sent from the stationary central
element of the TACAN transmitter
antenna (fig 15-1). The two types of
bearing signal patterns are the coarse
and fine azimuth patterns.
a. Coarse azimuth pattern. This
pattern is created by rotating a plastic
cylinder around the central element of
the antenna at 15 revoiutions per second
(RPS). A metal wire embedded vertically
in the cylinder distorts the radiated signal
into a cardioid (heart-shaped) pattern. Its
rotation causes the cardioid pattern to
also revolve at 15 RPS. This resulting
rotating pattern (fig 15-2) is referred to
as the coarse pattern. From this. the
aircraft receives an amplitude modulation
of 15. hertz. This means that the strength
WIRES ON OUTER
ROT A TING CYLINDER
STATIONARY CENTRAL ELEMENT
REFERENCE
PULSE DISK
of the signai goes from maximum to
minimum and back to maximum at the
rate of 15 times per second.
b. Fine azimuth pattern. To produce
the fine pattern, another larger plastic
cylinder containing nine wires is mounted
around the central element and the
smaller cylinder, and also rotates at 15
Figure 15-1. TACAN ground beacon antenna design (azimuth)
FiXED CENTER ELEMENT
w
INNER PARASITIC ELEMENT
MAGNETIC NORTH
1\11 ~ ",' I.' I,' I ,,\ ':.'.'. \',
~, ,I,.'.'" ,', I' ,
.-
",,'~:"\\:'\\"\ 11'1','//1 ~'" ,
.,~:~:{~:,\\:"\',, r'I':'I.'/~;" ",/,'
... "..",',::..... " " r' , ~'~" ~ "'..' ... ......~:~..: i. ;,,:~t~\~'. ,"'('" :/" "'..:'~ -:: -;. "':~:;~~~~~:"\.'\ :~f.ii ~~~:i:-~,
E
COARSEPATTERN S
CARDIOID PAnERN REIULTINO FROM INNER PARAlmC ELEMENT
Figure 15-2. Coarse azimuth pattern
15 DECEMBER 1984 UPDATE .FM 1-240

RPS. This is the fine antenna which
superimposes nine lobes on the already formed coarse pattern (fig 15-3). This forms a 135-hertz signal.
c. Determination for bearing. To determine the aircraft's bearing from the station, a phase angle must be electronically measured. To measure the phase angle, a fixed reference is
established. This fixed reference is a 15-
T ACAN
. LOBE PATTERN ROTATES 1& RPS. AIRCRAFT RECEIVES SIGNAL AS A 1. CP8 SINE WAVE SUPERIMPOSED UPON A 16 CPS SINE WAVE
~
pulse-per-second nondirectional signal normally referred to as the main reference bearing puise. One main reference pulse Occurs with each revolution of the antenna when the peak of the cardioid is at a magnetic direction of 090 degrees. In addition to the main reference pulse, eight auxiliary reference pulses also Occur during one revolution of the ground beacon antenna. Therefore, a reference pulse occurs
each 40 degrees of antenna rotation (360 degrees -;- 9 pUlses). The airborne equipment electronically measures the time lapse between the main reference pulse and the maximum amplitude (signal strength) of the 15 hertz rotating signal pattern (fig 15-4). This determines the aircraft's bearing from the station within a 40-degree sector. Then, the time lapse between the auxiliary reference
N
w
Figure 15-3. Fine azimuth pattern
E
s
N
W?E 9 9 Q 9 9 ~ Q 0 : SEARING TO STATIoN! GROUND
I ROTATING: 15 : DETERMINES THIS TIME INTERVAL ANTENNA: PARASITIC: RPS: TO POINT OF MAXIMUM SIGNAL STATIONARY: ELEMENT:
.
-, !=LEMENT : : :
I,i A~: "- Aux-LI:ILIARY~+ + -L 1 i i V I I MAIN REFERENCE:
.
.
.: I :~~~~~~~~GNALS 11~ CyL::~:~:: SIGrLS I 1i9Ãlv. -l I ì i
ii' .
tõ', :Ó', : 0"'. ~O\ '0' /0\ '0,' .to} "Ò\ '0' '-" ...-' ....,..' ....,4 '.....1 \..,' ~... '--.... \...../ \..,' 15 : ~~~~~~~J~s VH~~I~I~E INT~RVAL T'O POINT OF RPS
:: : MAXIMUM SIGNAL: . t , I I ~ I I I , I': 15CYCLE ~'
1/13 -40:.10- I SIGNAL
PER SEIC. 7400 M. SEC I I I 135 CYCLE SIGNAL
COMBINATION OF SIGNAL RECEIVED BY AIRCRAFT
Figure 15-4. Bearing determination
15 DECEMBER 1984 UPDATE. FM 1-240 131

pulses and the maximum amplitude of
the 135-hertz signal is measured to
determine the aircraft's position within
the 40-degree sector. The accuracy of
this measurement determines the position of the aircraft relative to the
station within plus or minus 1 degree.
. 15-4. Distance measuring equipment Distance between the aircraft and the ground station is determined with TACAN
equipment by measuring the elapsed
time between transmission of interrogating pulses of the airborne set
and reception of corresponding reply
pulses of the ground station (fig 15-5). The aircraft transmitter starts the
process by sending out the distance interrogation pulse signals. Receipt of
these signals by the ground station
receiver triggers its transmitter which
sends out the distance reply pulse
signals. These pulses require
approximately 12 microseconds round
trip travel time per nautical mile of
132
distance from the ground beacon. The
range Indicator displays slant-range
distance (fig 15-6) to the TACAN beacon
in nautical miles. Since a large number of
aircraft could be interrogating the same
beacon, any particular airborne set must
sort out oniy the pulses which are replies
to its own interrogations. Interrogation
puises are transmitted on an irregular,
random basis by the airborne set which
then "searches" for replies synchronized
to its own interrogations. If the signals
are interrupted, a memory circuit
maintains the last distance indication on
the range indicator for approximately 10
seconds to prevent the search operation
from recurring. The searching process
starts automatically 10 seconds after the
airborne set is tuned to a new beacon or
when there is a major interruption in
beacon signals. Depending upon the
aircraft's actual distance from the
beacon at the time, the searching
process may require up to 22 seconds.
15 DECEMBER 1984 UPDATE oFM 1-240
15-5. TACAN characteristics
a. Bearing/distance uniock. TACAN
bearing and distance signals are subject
to line-of-sight restrictions because of
their utilization of UHF frequencies.
Because of the transmission/reception
principles, unlock (indicated by rotating
of bearing pointer and/or range indicator) will occur if these signals are
obstructed. Temporary obstruction of
TACAN signals can occur in flight when aircraft fuselage, wing, or gear; external
stores; or wingmen get between the
ground and the aircraft antenna. Aircraft
receiver memory circuits prevent unlock
for short periods (approximately 10
seconds for DME and 2 seconds for
azimuth). But beyond this, unlock occurs
and will persist until the obstruction is
removed and search cycles are completed. Unlock may occur during
maneuvers, such as procedure turns, which cause the aircraft antenna to be
obstructed for longer than 2 to 10
seconds.

INTERROGATION AND PULSE REPLY FOR DME
INTERROGA TION-
þ REPLY
X
1-~ >ì -X
,
Figure t~. DME principles
SLANT RANGE DISTANCES
I SLANT RANGE
I
ACTUAL RANGE ACTUAL RANGE
~ -
......
Figure tH. DME distances
15 DECEMBER 1984 UPDATE. FM 1-240 133

b. Azimuth cone of confusion. The
structure of the azimuth cone of
confusion over a TACAN station (fig 15- 7) is considerably different from other
NAVAIDs. The azimuth cone can be up
to 100 degrees or more in width
(approximately 15 nautical miles wide at
40,000 feet). indications on the aircraft
instruments make it appear even wider.
, Approaching the TACAN station, usable
azimuth information is lost before the
actual cone is reached. This is correct
even though actual azimuth unlock is
prevented by the memory circuit until
after the aircraft has entered the cone. After the cone is crossed and usabie
signals are regained, the search cycle
extends the unusable area beyond the
actual cone. Only azimuth information is
unusable in the cone of confusion; siant-
range distance information continues to
be displayed on the range indicator.
c. Range indicator fluctuations. Siight
oscillations up to approximately one- fourth nautical miles are normal for range
indicator operation. When a usable signal
is lost, the memory circuit maintains the
indicated range for about 10 seconds. If
the signal is regained during this period,
~ ;'
the indicator will "jump" to the correct reading.
d. Erroneous TACAN indications.
Several forms of malfunction of airborne
equipment or interference between ground stations can give false or
erroneous TACAN navigational
information to an aviator. These discrepancies are easier to recognize
and guard against if the aviator is aware
they can occur. The more common
erroneous indications are- (1) A 40-degree azimuth error lock-on.
The construction of the TACAN ground
antenna is such that it transmits a series
of nine signai lobes (eight auxiliary and
one main reference pulse) 40 degrees
apart. With the airborne receiver working
correctiy, the main reference puise
(which occurs when the peak of the
rotating cardioid pattern is at the 090-
degree magnetic direction) locks on at
the 090-degree slot of the receiver. With
a weak airborne receiver1 the main
reference pulse may "slide over" or miss
the 090-degree slot and lock on at one
of the auxiliary positions. When this
occurs, azimuth indications will be 40
degrees or some muitiple of 40 degrees
CONE OF
CONFUSION
~
Figure 15-7. TACAN azimuth cone of confusion
134 15 DECEMBER 1984 UPDATE. FM 1-240
in error. Rechanneiing (retuning) the
airborne receiver to deliberately cause
unlock may cause the receiver to lock on
properly. When other bearing information
such as VOR or ADF is available, it
should be used to verify the position
periodically. This type error is unusual,
but possible in present day TACAN sets.
(2) Co-channel interference. Co- channel interference occurs when an aircraft is in a position to receive TACAN
signals from more than one ground
station on the same frequency. Normally
this occurs only at very high altitudes
when distance separation between like
frequencies is inadequate. DME, azimuth,
or identification from either ground
station may be received. This is not a
malfunction of either air or ground
equipment, but a result of interfering
signals of two ground facilities.
(3) False or incorrect lock-on. False or
incorrect lock-on indications in the
aircraft can be caused by misalignment
or excessive wear of the airborne crystal
selector assembly. Selection of a
numbered TACAN channel activates a
drum and wiper arrangement which
rotates until the wiper contacts the
proper crystal on the drum. These crystal
contact points are very small and close
together. Wear or misalignment can
cause the wiper to miss the proper crystal and contact the wrong one. This
can result in no station being tuned in or
the wrong station. When this occurs, rechanneling of the receiver may result
in the correct channel being selected.
e. Precautionary actions. The following
precautionary actions should be taken to
guard against in-fiight use of erroneous navigational signals:
(1) ALWAYS check the identification of
any NAVAID station and monitor it during
fiight. (2) ALWAYS use all suitable
navigational equipment aboard the
aircraft and cross-check heading and
bearing information. (3) NEVER overfly preplanned
estimated time of arrivals without careful
cross-check of NAVAIDs and ground
checkpoints. (4) CHECK notices to airmen
(NOTAMs) and FLIP before flight for possible malfunctions or iimitations on NAVAIDs to be used.
(5) DISCONTINUE USE of any suspected NAVAID and confirm aircraft position with radar or other equipment.

15-6. AN/ARN-103 TACAN The ANI ARN-1 03 TACAN control panel consists of an operabon mode-select control, a mode switch, volume control, channel select control and indicator, built-in-test (BIT) capability, BIT indications, and an ECM indicator (fig 15-8). Refer to the aircraft operator's manual if a different set is installed in the aircraft.
15-7. Navigational procedures Since TACAN presents bearing information in the same manner as VOR, there is no change in the procedures used for orientation, track interception, or tracking. The procedures presented in this chapter will be those used to take advantage of range information presented by TACAN.
15-8. Station passage Because of the large TACAN azimuth cone of confusion, an inaccurate determination of station passage will result when using the TO-FROM indicator reversal or RM I needle reversal. The most accurate method of determining passage is by nobng when the range indicator stops decreasing. Flying directly over the station, the range indicator will stop decreasing when it indicates the approximate aircraft albtude above the station in nautical miles. For example, an aircraft flying at 12,000 feet above ground level (AGL) is at an altitude of approximately 2 naubcal miles (6,000 feet approximates 1 nauticai mile). Therefore, the range indicator should stop decreasing when it indicates approximately 2 nautical miles (fig 15-9). At altitudes of 5,000 feet AGL or less, the reversal of thé sense indicator is accurate enough at ATC estimates.
15-9. Ground speed checks A ground speed check can be made while maintaining a course to or from a TACAN station. As a guide, however, ground speed checks should be performed only when the aircraft's slant- range distance is more than the aircraft altitude divided by 1,000. For example, ~ the aircraft is at 10,000 feet, ground speed checks should be performed only when 1 0 or more naubcal miles from the stab on. Checks made below 5,000 feet can be considered accurate at any distance from the stabon. To perform the ground speed check, begin bming when the range indicator shows a whole number. After a predetermined time has elapsed, check the range indicator and note the distance flown. On a computer, set the distance flown over the elapsed
ECM WARN LAMP
T A
C A
N
~ MODI
)!
CHANNEL SELECT CONTROLS
MODE SWITCH
".-vol;
G r/R~
OPERATION MODE SELECT CONTROL
Figure 15-8. TACAN control panel (AN/ARN-103)
8 .' ;:;------ ,
. . .
""'"""""., .~ .
.-.'" .
,- .
. -- - - ..,,-
8 ::r---- .,co
Figure 15-8. Indication of station passage
15 DECEMBER 1984 UPDATE oFM 1-240 135

time in minutes and read the ground
speed above the 60 index (fig 15-10).
The longer the elapsed time, the more
accurate will be the computed ground
speed. To determine ground speed
without using the computer, multiply
distance flown in 2 minutes by 30, 3
minutes by 20, 6 minutes by 10, and 12
minutes by 5.
15-10. Intersections
When using TACAN, intersections can easily be established without cross-
tuning different stations by placing the
course depicted on the emoute chart in
the course selector and observing the
published DME reading for the desired
intersection. For example, assume tracking is outbound from Wiregrass
VORTAC on V-241 (fig 15-11) and
Hound and Dared intersections must be
established. With 230 degrees set in the
course indicator and a centered needle,
the aviator will be over Hound
intersection when the distance indicator
reads 20 nautical miles and Dared
interseGtion when the reading is 27
nauticai miles.
(j) SET UP COMPUTER (])AFTER 3 MINUTES HAVE ELAPSED AGAIN NOTE
~NGEINDICATOR
.e. ~tn'~ ~'"
i~"""",-~, V ~
.. ~~... '" ----.. ,. i
i - ~
~~----e - <D NOTE TIME AND
RANGE INDICATION
15-11. TACAN arcs
a. Definition. TACAN arcs are lines of
constant radial distance from a TACAN
station and are sometimes flown during
departures and approaches. Arc
instructions are given as "via (number of
miles) mile are, direction (east, for
example) of (name of NAVAl D)." An example of this is "Via 1 O-mile are, east of Wiregrass VORTAC."
b. Uses. TACAN arcs are used primarily for instrument approaches and
departures. Approach procedures are depicted in the instrument approach
procedures of 000 FLIP. Departure procedures are depicted in standard
instrument departures or may be issued
by departure control. Three typical uses of TACAN arcs are discussed below.
136
Figure 15-11. DME mileage depiction
15 DECEMBER 1 984 UPDATE. FM 1-240

(1) Transition to a final approach radial. The approach depicted in figure
15-12 would be executed by tlying the published radial inbound from the initial
approach fix until intercepting the 10 DME-mile arc. This arc would be maintained until the final approach radial
TACAN RWY 2
PAtato:: N'9 CON 119.t5 358.3 PAftIOt TOWER *
t26.2 348.4
ON> CON 121.7 335.8 QNe DEL
118..
.... ATIS *
273.'
/
/
/ I
~2Doo 110"-
ORlANDO 52.2)
I <:,~
I 'f>''!'J''
\ \
was intercepted, at which time the pilot would turn inbound on final approach. The final approach fix would be established when the range indicator showed 5 nautical miles and the missed approach point would be indicated by a
1.6 nautical mile reading.
A.i Jti Ú4 U:.';'
----- ~ R.2931
./ .
o.UTfC)N: 1Ight8d boDoon OJ! unmarIaed cab18 to W.DOO' in R.2931.
'.' . .,
. .
"'-- ............
EMfRG SAf AL T 100 NM 1. 000 - - --- ATLAS
$EtA, MISSED APPROACH 1-090 10 DMf 1-1'U c.-. draight ah80d to 25QO, 5õëõ~DrME un right to AnAS. I I 7 DMf "
2500 IO~.~1 . "':'" ~ I I TACAN
I 11Q!& III.' 1.... 0...-1 I 1""^~ V "':"
I tv<. 1 I """"I I ..............
CATEGORY
5-2
CJOa.N:;
A
.æ-1
5-_2
TACAN RWY 2
.
:WO--Yo
0
PAtRICk AFa (kCOF) lO(UA 8tAUt. flOQID,w"
'-----
~~ ""> ;~~
'-\ \
WC~ \
oo:~ (W)
;% I /
r'" /
~~ /
-ræ-J/ ~ERO BEACH
..-/'
BEV 9 HIll ~ 2-20 1E11 ..,. 2
... ..
471 (500-1) S6C>-2 . 2
93
"
... @
~> OW' to TACAN
coco... BEACH. FLORIDA PATRICK AFB (KCOF)
Figure 15-12. TACAN arc used to make a transilion 10 flnal approach radial
:WO--Yo 333 (<<10-"1
".W'N-80.36'W
...
15 DECEMBER 1984 UPDATE. FM 1-240 137

(2) Entire final approach pattern. The approach depicted in figure 15-13 would
be executed by flying a course of 331
degrees outbound from the Baltimore
VORTAC until intercepting the 14.7 DME-
mile arc. The 14.7-mile arc would then
be maintained throughout the approach
until reaching the missed approach fix.
The final approach fix would be
established by setting 036 degrees in the
course indicator and awaiting a centered
needle. The missed approach fix would
be indicated by a centered needle with
055 degrees .et in the course indicator.
TACAN 1 RWY 14 '" AWD2 cuW)
... -""
~ ~
y iii";,
" '.';&
rnm:J
_LIoIAIIINS'AÆ W_"""""""
--- 1""..1
-- III"." -- .IU'-"
It
""'" ..,
12300 I
/4/ -- ---"- I'''' M "1M" VCIIf~ "''''11 DMI--
ICIiAIt..,........
.
...'
..- ~I'
c
-as ",. (1~1
- 'JØ0.3 11,. 11..,1
.., 1. '" n8' ~...,....
TACAN 1 RWY 14 -.....- "' w1WiC8, MdYUHD
OUNN ~ 00IAI"" STAIt
Figure 15-13. TACA:N arc used for entire final approach pattern
138 15 DECEMBER 1984 UPDATE' FM 1-240

(3) TACAN departures. A TACAN departure (fig 15-14) could be a portion of a SID or it could be described by departure control. The controller would issue essentially the following instructions concerning such a departure: "After takeoff, track outbound on the 080-degree radial until intercepting the 10.DME-mile arc east of the station; turn left 10 maintain the 1 O-DME-mile arc; intercept and track outbound on the 030- degree radial."
I I
.I ,] 1":,: I
/ /
/ /
/
~ ò'
<ë-"?"
"
~ Q
.~ /i" J:.
i.{:.. ". o'
~ .
I ~ I ~'<;
.
I ~(j , "''''''''& I Q
\"."':.'1-: I ~ ':"::::~' I " .'..,.
/ LEAD POINTS '\\f- , - '.'
........Z :.:.:
,/ ~' ..è , ;0800
, ..........',;.i::, / ..........~B.$'#~''!!.-'"'''''' \ tJ/Hf.'ff.''f'!:''''''''. .
AIRPORT
Figure 15-t4. TACAN departure
15 DECEMBER 1984 UPDATE. FM 1-240
-- -- -- -- -- ~Þ.O\Þ.l.
139

c. Arc interceptions. To intercept a
TACAN arc (fig 15-15) from a radial
(maintaining course inbound or outbound), a turn of approximately 90
degrees is required to pi ace the bearin9 pointer on the wingtip toward the station.
Here the range indication is equal to the
desired arc. A good technique to
determine the leadpoint for a 90-degree
arc interception is to lead the desired arc
one-halJ percent of the ground speed for
a standard rate (3 degrees per second)
turn. Or 1 percent of the ground speed for a half-standard rate (1 V, degrees per second) turn can be used. For example,
with a 200-knot ground speed, the
amount of iead would be 1 nautical miie
for a standard rate turn and 2 nautical
miles for a half-standard rate turn. The
turn to intercept the arc should be
started when the range indication is
equal to the radius of the arc - plus or minus the lead. The lead can be added
to the radius of arc when intercepting fhe
arc from an inbound course to the
station. It can be subtracted when intercepting the arc from an outbound
course. During the last 30 degrees of
turn, the bearing pointer and range indicator must be monitored to determine
when to roll out. If it appears that the
turn will not be compieted at the desired
range, the aviator should rollout with the
bearing pointer ahead of the wingtip to
decrease the range, or behind the
wingtip to increase the range.
I I LEADPOINTS
1 % X GROUND SPEED = NAUTICAL MILE LEAD FOR
1.1/2 "!SEC RATE OF TURN
1/2 % X GROUND SPEED = NAUTICAL MILE LEAD FOR 30 SEC RA TE OF TuRN
TACAN
STATION
Q IF THE TURN WILL NDT BE CDMPLETED AT THE DESIRED RANGE, ROLL OUT WITH THE BEARING POINTER AHEAD OF THE WINGTIP TO DECREASE THE RANGE
ANO BEHIND IT TO INCREASE THE RANGE \
EXAMP,LE: RATE OF TURN 3" PER SEC GROUND SPEED 200 KTS
1/2%.2=1 NMLEAD
/
. -II .::!i::::.;.....tf~ "" .. '"
.::::' ",.''''" d~::' ..
~(~.q .:.
D"O'I\I
8 ,::i::' ,. INTERCEPT ARC BY TURNING
.::::' TO PLACE STATION ON
./~/::' - WINGTIP AT REQUIRED DISTANCE
Fig,ur~ 15-15. Intercepting TACAN arcs
140 15 DECEMBER 1984 UPDATE. FM 1-240

d. Relative bearings. In theory, it is
simple to fly a TACAN arc by maintaining a relaUve bearing of 90 degrees or 270 degrees (fig 15-16). In practice, this can be difficult since the exact rate of
necessary turn will vary with distance from the facility, airspeed of the aircraft, and drift in crosswind conditions. A good procedure is to fly a series of short legs, keeping the bearing pointer on or near the wingtip position. Corrections should be made, as necessary, with reference to the distance shown by the range indicetor. For example, with the bearing pointer on the wingtip and the aircrafl at the desired range, heading should be maintained and the bearing pointer should be allowed to move 5 degrees to 10 degrees behind the wingtip position. This will cause the range to increase slightly. Nex1, a turn is made toward the station to place the bearing pointer 5
degrees to 1 0 degrees ahead of the wingtip and this heading is maintained until the bearing pointer is again behind the wingtip. Corrections from the inside
are assisted by the arc curving toward the aircraft. If outside the arc, greater corrections will be needed to return. The range indicator should be continually monitored and adjustments in heading should be made to maintain the desired
arc.
\
\ \ \
~ hl~ I~ ------
-==:O'e. ("~,,,},É_~.- , "fI",,.r-
þ.9-c' 'wi'~:~'. CORRECT 10 20DEGREES FOR
'" (.~~/~ EACH' 2M!LEDEVIATIONFROMARC
'-.. .~ '.'. ~r";;;':;;;':!.~ . -
Q----~~~~-----
Figure 15-16. Maintaining TACAN arcs
15 DECEMBER t984 UPDATE. FM 1-240
VARY THE AMOUNT OF CORRECTION ACCORDING TO THE RATE OF DEVIATION AND ADJUST AS NECESSARY ACCORDING TO THE RA TE OF CORREcnON
14

e. Radial interceptions. To intercept a
radial from an arc, the desired course is
set in the course selector window as soon as practical. The rate of bearing pointer movement is monitored while flying the arc. The interception angle will
be approximately 90 degrees. Changing
the lead point used for the arc interception (c above) from nautical mile
to degrees is a technique that can be used to determine an approximate lead point. Use the relationship that 1 degree is 1 nautical mile wide at 60 nautical miles from the station and its width
increases or decreases in proportion to the distance (fig 15-17). For example, with a 150-knot ground speed using a
standard rate turn, a three-fourth nautical
mile lead point would be used to intercept the 15 nautical mile arc. Since 1 degree of travel along the 15 nautical mile arc represents one-fourth nautical
mile, the lead point when intercepting a
radial from the arc (no wind) would be 3
degrees (fig 15-18).
142
0 15NMARC1D = 114NM
3ONMARC10 = 112f11M
45NMARC 10 = J/4NM
6ONMARC1D", lNM
\DCAN 8E THOUGHT OF ÄS' NMWIDEATOONM FROM THE STATION AND INCREASESQR DECREASES IN PROPORTION TO THE OISTANCE.
Figure 15-17. Degree-distance relationship along a TACAN arc
DESIRED RADIAL ":::"."" '-"";::'. ,
LEADPOINT IN OEGREES 30 " 314 NM ..::::.:....\,::{:::::... ::.:.'
SET THE DESIRED COURSE SELECTOR WINDOW AND TURN AT THE
lEADPOINT
CHANGE THE NAUTICAL MILE lEADPOINT USED FOR THE ARC INTEACEPTIO~'" .'
INTO DEGREES. .
.:' ~v :::.'
~ ",' i>~ ','':,:.
..." ""~':"
~'::"..:.314 NM LEAD POINT .,.q;. . '..:::.
, i>~ ,',','"
,/J '\:::::~~..
Figure 15-18, Intercepting a radial from an arc (no wind)
15 DECEMBER 1984 UPDATE' FM 1-240

15-12. TACAN holding TACAN holding (fig 15-19), using distance instead of time, provides a
virtually unlim~ed number of holding fixes available at each facility. Due to the cone of confusion, holding is normally accomplished a considerabie distance from the station. The direction of holding is relative to the holding fix (radial! distance) rather than the TACAN facility.
Once in the holding pallern, turns are initiated at the indicated range published
or issued by the controller. The inbound course to the holding fix should be set in
the course selector window. Since the holding pallern may be a considerable distance from the TACAN station, course corrections to Intercept course prior to reaching the holding fix will be larger than those normally used in VOR or ADF holding. For example, 6 degrees off course at 30 miles is a 3-mile course error; whereas 6 degrees off course at 10 miles is only a 1-mile course error.
Chapter 16 Instrument Approach Procedures
16-1. General The instrument approach is a simple blending of two skills: basic instrument flying and precise navigation. Both must be performed regardless of the effect of wind or weather. There is a third VMI element essential to any instrument flying, especiaily to approaches. It is the judgment and personal discipline required to decide to go to the alternate destination when appropriate. An
instrument approach procedure may have four separate segments. These include initial, intermediate, final, and missed approach segments. In addition, an area for circling the airport under vlsuai conditions shall be considered.
Section I. Instrument Procedures
16-2. Identilication of Procedures a. Straight-in procedure identification.
Procedures whicih meet criteria for authorization of straight-in lending minimums shall be Identified by the type of navigationaJ aid(s) which provide final approach guidance. Identification is also by the runway to which the final approach course(s) are aligned. ILS Rwy 18R, LOC BC Rwy 7, TACAN Rwy 36,
.
LDA Rwy 4, NDB Rwy 21, VOR Rwy 15, VOR/DME Rwy 6, ILS or TACAN Rwy 9
are examples. A slash (I) shall indicate that more than one type of equipment must be used to execute the final approach such as VOR/DME, or ILSI DME. When procedures are combined, the word "or" shall indicate either type of equipment may ba used to execute the final approach such as ILS or TACAN, ILS or NDB, VOR/DME or TACAN. When the same final approach guidance is used to the same runway, the procedures shall be identified as follows: TACAN 1 Rwy 36, TACAN 2 Rwy 36, VOR 1 Rwy 18, VOR 2 Rwy 18. All
procedures should be carefully examined to determine capabil~ of flying the entire procedure. In some instances, the missed approach segments are designated to/from a NAVAID with which
Army aircraft are normally not equipped,
.... .,...,- .''''0'''- -..-,..
TACAN HOLD-
..=,':- -; ~;;; ~E~ "'+4,
,:::::::i::/~+4",'i/::i ...NOTTMIRATICHI
'i:::inf .)(' ~~i~~~I~F
."P "",,,;:;:;'"
TACAIII RATION
-
such as TACAN. b. Circling procedure identification.
When a procedure does not meet cr~eria for straight-in landing minimums authorization, ~ shall be identified by the type of navigational aid which provides final approach guidance and an alphabetical suffix. The first procedure formulated shall bear the suffix "A" even though there may be no intention to formulate additional procedures. If
add~nal procedures are formulated, they shall be identified alphabetically in
sequence, such as VOR-A, VOR/DME-B, NDB-C, or LDA-D. A revised procedure will bear its original identification.
16-3. Units of measurement Units of measurement are expressed as follows:
a. Bearings, courses, and radials. Bearings and courses shall be expressed in degrees magnetic. Radials shall also be expressed in degrees magnetic and shall further be identified as radials by prefixing the letter "R" to the magnetic bearing FROM the facil~. For exampie, R-027 or R-O 10.
b. Altitudes. Units of measurement for altitude are expressed in feet. Published heights below the transition levels shall be expressed in feet above MSL. Published heights at and above .the transition levels shall be expressed as flight levels.
c. Distances. All distances shall be expressed in nautical miles (60076 feet per nautical mile) and tenths thereof. The exception is when applied to visibilities whicih shall be expressed in statute miles and the appropriate fractions thereof. Expression of visibility values in nautical miles or metric equivalent is pèrmitted in
overseas areas where it coincides w~h the practice of the host nation. Runway visual range shall be expressed in feet except in host nation procedures where the metric equivalent is used.
d. Speeds. Aircraft speed shall be expressed in knots.
16-4- Aircraft categories a. Aircraft performance has a direct
effect on the airspace and visibility
needed to perform certain maneuvers. Examples are circle to land, turning missed approaches, or final alignment corrections for landing and descending. Terminal instrument procedures (TERPs) provide for the differences in
performance by placing aircraft in one of five categories and then establish approach minimums for each category.
b. The five approach categories (A through E) are based on 1.3 times the stall speed in the landing configuration at maximum authorized gross landing
Figure 15-19. TACAN holding
15 DECEMBER 1984 UPDATE -FM 1-240 14~

weight. An aircraft will fit in only one category and that category will be the highest category meeting the specification. (See tabie 16-1.) If rt is
necessary to maneuver at speeds in
excess of the upper limit of the speed
range for the aircraft's category. the
minimum for the next higher approach
category should be used. For example, an aircraft which falls into Category C, but is maneuvering to land at a speed in
excess of 140 knots, but less than 166 knots should use approach Category D
minimums.
Table 16-1 Aircraft approach 'categories and speed criteria
Approach
Category Speed
A e
Speed less than 91 knots. Speed 91 knots or more, but less
than 121 knots.
Speed 121 knots or more, bulless than 141 knots. Speed 141 knots or more, bu11ess than 166 knots. Speed 166 knots or more.
c
0
E
NOTE: All US military helicopters may utilize the aircraft I approach Category. A minimum published in authorized
FLIPs. Approach category operating characteristics are used in determining turning radii and obstacle clearance areas for
i circling and missed approaches. Thereiore, helicopters ! operating a1 speeds greater than CAT A should use the , higher category minimums. Procedures containing the word I "COPTER" in the procedure title, as COPTER VOR 190, are
approved under TEAPs Helicopter Criteria lor helicopter use only and are restricted Lo SO knots indicated airspaed.
16-5. Instrument approach procedure Approach eegments begin and end at designated fixes. However, under some circumstances, certain segments may begin at specified points where no fixes
are available. The fixes are named to coincide with the associated segment.
For example, the intermediate segment begins at the intermediate fix (IF) and ends at the final app,'oach fix. The segments are discussed in the same order in this chapter as the aviator would fly them in a complete procedure. (Example would be from an initial,
through an intermediate, to a final
approach, and the missed approach if
required.) Only those segments which
are required by local conditions are included in a procedure. The design of the approach should blend ali segments to provide an orderly maneuvering
pattern to the local area with regard to
obstruction protection and airspace
considerations (fig 16-1). a. Feeder route. The feeder route,
when required, is used to designate
course and distance from a fix in the
enroute structure to the initial approach fix (lAF). Only those feeder routes normaliy used which provide an operational advantage are established and published.
b. Initial approach segment. In the initiai approach, the aircraft has departed the en route phase of flight and is
maneuvering to enter the intermediate
segment. An initial approach may be made along an arc, radial, course, heading, radar vector, or any combinetion. Procedure turns, holding
pattern descents, and high altitude penetrations are also initial segments.
c. Intermediate approach segment. This is the segment which blends the initial approach segment Into the final
approach segment. It is the segment in
which aircraft configuration, speed, and positioning adjustments are made for en1ry into the final approach segment. The intermediate segment begins at the intermediate fix or point and ends at the
FAF. There are two besic types of intermediate segments-the radiel of
course and the arc. When radar vectors
are used, the vector course to the final approach course constitutes the initial
segment. Also, the flight along the final approach course to the FAF is fhe intermediate segment.
d. Final approach segment. This is the
segment in which alignment and descent for landing are accomplished. The final
approach segment begins at the final .
approach fix, or point, and ends at the
missed approach point. Final approach may be made to a runway for a straight-
in landing, or to an airport for a circling
approach. e. Missed approach segment. A
missed approach segment begins at the
missed approach point and provides
obstruction ciearance and course guidance to a fix for holding or return to the en route structure. The missed
approach point specified in the approach procedure may be the point of intersection of an electronic glide path with e decision height (DH) or minimum
descent altitude (MDA), a naviga1ion facility, a fix, or a specified distance from the final approach fix.
144
Figure 16-1.' Segments of an approach procedure
15 DECEMBER 1984 UPDATE. FM 1-240

16-6. Straight-in approaches In figure 16-2, an aircralt approaching the Baldwin VORTAC requests and receives clearance for a VOR Rwy 9
approach to the Lee airport. Over the Baldwin VOR (lAF), the aircralt begins descent to 2,000 feet while flying
between the Baldwin VOR and Blunk intersection (the initial approach segment) on the Baldwin VOR 135- degree radial. The term "NO PT" (no procedure turn) appears on the course between the Blunk intersection and the Lee VOR indicating that when cleared for VOR Runway 9 approach from this
direction, a procedure turn is not authorized. The aircralt descends to
1,300 feet between the Blunk intersection and the Lee VOR (intermediate approach segment) on the 270-degree radial. Alter passing the Lee
VOR (FAF) inbound to the airport on the 090-degree radial, the aircraft begins its final descent to minimum descent altitude published on the approach chart. During the descent from 1,300 feet to landing minimums, the aviator should expect to establish visual contact with the runway environment and be in a
position to complete the visuai landing. If
visual contact with the runway environment is not made or cannot be maintained by the time the aircraft has reached the missed approach point, the missed approach procedure will be executed. Straight-in approaches are required unless otherwise authorized by air traffic control (ATC)-
a. Where the procedure specifies "NO PT" or "FINAL."
b. When a radar controlled vectors the aircraft on a radar initial approach to a
final approach fix or a position on the final approach course.
IAF I'IALI)WIN
Q IIlli2F!AI -... r:H ~<:.j .
-.. " ~o.
-', i:I r".~" !)
'0 .
'J
'" BLUNK I':::.
1300 NO PT 0900 (7.9)
(AI PLAN VIEW
--. IAF VORTAC
3000
IBI PROFILE VIEW
c. When the controller specifies in the approach clearance "cleared for straight- in approach" aithough "NO PT" is not charted and the aircralt is not being
radar vectored.
NOTE: The term "straight-in approach," as used in this paragraph, refers to an instrument approach procedure that does not include a procedure turn. it should not be confused with "straight-in landing." An aircraft may execute a
"straight-in approach" to a specified
runway and then circle to another runway for landing. Circling minimums will be applied in this case. Straight-in landing
minimums apply when published on the approach chart. A landing is to be made on the runway specified in the ATC
clearance and contained in the procedure chart title.
LEE .
-'" LEE. .
0900-0 -f-
~ IN TERM '='0 c:: lATE
Figure 16-2. Straight-In approach
15 DECEMBER 1984 UPDATE. FM 1-240
~_. -- VOR
I FAF
MAP
14~

1&-7. Instrument approach with procedure turn In figure 16-3, an aircraft is approaching
the Lee VOR from a direction not suited
for a straight-in approach. In this case, the approach will require a procedure
turn. The aircraft is cleared for a VOR approach while en route from the Blinkinsop VOR to the Lee VOR ((A), fig 1 &-3). If tha aircraft is flying at an altitude above the published feeder route altitude (3,000 feet, fig 16-3), the aviator will be cleared to descend to the feeder route altitude upon receiving approach clearance unless ATC issues an altitude
restriction. The initial approach begins
when the aircraft crosses the Lee VOR (IAF) outbound. As the aircraft flies outbound for a procedure turn, it
descends to 1,800 feet ((B), fig 16-3). After completion of the procedure turn, the aircraft begins the intermediate approach segment and descends to 1,300 feet. The final approach segment
, begins after passing the Lee VOR (FAF) inbound and descent to landing
minimums is commenced. Positive indication of VOR station passage and
an on course indication must be received before descending below the intermediate approach segment altitude.
"---". F ('~ ft m"~..
I - -~ , ,
\ , ,) ""- , ,\ '" ","
"
-R270~~~0~~-~:' ,.~, þ
",/ """~o -".X 1''''''"'0'
(AI PLAN VIEW
.
~,cs ":'.:
IAF VOR
-.-,1- INI'\IAL
FEEDER
3000 ... ,.
I<EMAIN WI'\HIN lONM 1800- INTER MEDIA TE
.. -"/rv "'I(
'--'" IBI PROFILE VIEW lEE
MAP
GLiNKINSOP
Figure 16-3. Approach with a procedure turn
146 15 DECEMBER 1984 UPDATE. FM 1-240

Section II Feeder Routes/Standard Terminal Arrival Routes
16-8. Feeder routes The terms "feeder route" (sometimes referred to dS terminal routing) and "standard terminal arrival routes" (STARs) refer to procedures whereby an aircraft departs one enroute facility or fix
and proceeds along a specified course to a nearby initial approach facility or fix. Figure 16-4 shows three facilities in a
terminal area: Baldwin (BAL), Blinkinsop (BLS), and Lee (LEE), and an intersection (KAREN). Two of these (BAL
and BLS) are not suitably located to
serve as approach aids; the other (LEE) is localed to provide approach service to
the airport. Air traffic arriving at BAL may make a straight-in approach, whereas aircraft arriving over BLS or KAREN intersection would use the published
feeder routes to LEE and make a
procedure turn.
16-9. Publication a. Feeder routes. Information on
course, distance, and minimum aliitude, which is necessary to execute a feeder route, is pubiished on instrument approach charts. Figure 16-4 shows an area with published feeder routes from a
VOR facility and an intersection to the LEE VOR approach faciiity. In each case, the information published for the feeder route consists of-
(1) Course, with the magnetic direction printed and indicated with an arrow.
(2) Distance, shown to the nearest tenth of a mile.
(3) Minimum authorized aititude, based upon a standard obstruction clearance of
1,000 feet or 2,000 feet in designated mountainous terrain above obstacles within 4 nautical miles of the feeder course.
NOTE: This same format is used to show course, distance, and minimurn altitude for initial and intermediate approach segments with the notation "NO PT" used to indicate that a procedure turn is
not authorized. b. Siandard terminal arrival routes. A
STAR is an ATC coded IFR arrival route established for arriving IFR aircraft destined for certain airports. The FLIP includes a book of STARs for the
airports. A STAR will be included in the flight plan if you intend to use one upon arrival at your destination or at any intermediate point where an instrument approach will be made. STARs may have published feeder routes which indicate
courses and distances and minimum altitudes from one or more enroute navigation facilities to the navigational facility or fix from which the STAR begins.
16-10. Execution A feeder route or STAR is executed in
accordance with the ATC clearance. Arriving aircraft are usually cleared to the IAF or to a fix on the enroute structure. Routing or a STAR will be named in the clearance. Certain of these fixes on the enroute structure will have designated
feeder routes or STARs to the IAF. If there is an approach delay, ATC will
issue holding instructions. If there is no
BALDWIN
Q 1092BAL :-:'"
~.L C~,:: .-..
. \." BLUNK 1300 NoPT
. R270 090 ,~ " (19)
'" .- P\
00/ ').~f,)f,)~,
/~~. KAREN \
Q
Figure 16-4. Three facilities in a terminal area
15 DECEMBER 1984 UPDATE oFM 1-240
delay, ATC will issue an approach clearance prior to the aircraft reaching the fix. The published feeder route or STAR (if one has been assigned) should be flown to the initial approach fix using the published altitude(s) as desired (uniess an altitude restriction or other altitudes had been assigned in the approach clearance) and then the approach should be executed. If there is
no STAR or published feeder route to the IAF, the controller should have issued routing instructions and assign an altitude to the IAF along with the approach clearance.
Section III Procedure Turns
16-11. Use of procedure turns A procedure turn is a maneuver which
allows the aviator to- a. Reverse flight direction. b. Descend from initial approach
altitude or last assigned altitude to a
specified procedure turn altitude from which descent for final approach is
begun. c. Intercept the inbound course at a
sufficient distance away from the approach fix to align the aircraft for the final approach.
LEE IAFI 1142LEE:~1
. + [jlINK!t"~()t'
'-.10 ð..1/ 00
0 "0
-tI",- 0
'1,,6HI c; -...
14ï

16-12. Typical patterns Typical procedure turn flight patlerns are illustrated in (A) and (B) of figure 16-5. A
description is given for each illustration
(a and b below).
a. The 45-degree turn from nonprocedure turn side (fig 16-5, A).
(1) In this situation, the aircraft flies on the outbound course or parallel to the
course on the nonprocedure turn side.
(2) At point A, the aircraft turns right
to the procedure turn heading published
on the approach chart, 315 degrees. The aircraft then flies 40 seconds after
crossing the approach course. If tracking
outbound on the approach course, timing
starts upon completion of the turn to the procedure turn heading. The time is
adjusted to compensate for known head winds or tail winds.
(3) At point B, the aircraft turns left to intercept the approach course at point C
and flies inbound to the FAF.
b. The 45-degree turn from procedure turn side (fig 16-5, BI.
(1) In this situation, the aircraft flies outbound to point A north of the approach course.
(2) At point A, the aircraft turns left to intercept the approach course. After intercepting the approach course, the aircraft turns right to the procedure turn heading published on the approach chart, 315 degrees. The aircraft then continues the procedure as discussed in
a above.
(/--'~" ,,,~~~:F:_.. ---
r:::::..
, -- ~
\, --- \' -- " -- '- " 0---- + c ........ -- )'
A -
45' ~U-;;";~ NON PROCEDURE TURN SIDE
(A) B
//""'--'( I " , "- \ "-
\ "
'- "
"
,../
'AF
'" 1147 LEE :-..
45' TURN FROM PROCEDURE TURN SIDE
A
------'"0- -- -
-- - --. -- ------8
. + C
(B)
Figure 16-5. 45.degree turns
148 15 DECEMBER 1984 UPDATE .FM 1-240

la) A
.....-- Ib)/-.... '- fro - ,
[e}/ -
- -
..... ...... I. ,/ I' ( .... - 1.':'~:~"11~::!'J"
"l"~""""......... , \ \ \ oil,
"".... .... ,
,ð. .... "":--'" "-"'-.... ~
ø .... ...:::-....~......
-11-270 B" 090. .. ""~Q;: "
" "
"
'(9,
c. Teardrop turn. A teardrop turn (fig 16-6) may be executed in lieu of the 45- degree type procedure turn if the aircraft heading at the time of crossing the
approach facility is conveniently aligned w~h a teardrop course.
NOTE: Each of the above (a, b, and c) applies to a procedure turn illustrated in figures 16-6 and 16-9. If a teardrop
pattern is shown in an approach procedure, the teardrop pattern will be flown.
(1) Upon arrival over the approach fix,
follow a course outbound not to exceed 30 degrees from the reciprocal of the
approach course and on the depicted
procedure turn side. (2) At the end of 1 minute (point A),
turn inbound to intercept the approach course at point B. The timing for the teardrop begins over the approach fix or wings level outbound, whichever occurs last.
(3) Because the time flown outbound is dependent on the time required to descend from procedure turn altitude to the low station altitude, and distance limitations are shown in the profile section of the approach chart, the teardrop angle should be adjusted according to the time outbound (fig 16-6) as follows:
(a) One minute outboun~O-degree teardrop track.
(b) Two minutes outbound-20-degree teardrop track.
(c) Three minutes outbound-10- degree teardrop track.
16-13. Procedure turn area a. The limiting distance for procedure
turns is published on the profile view of approach charts (fig 16-3, B). Procedure turn iimiting distances are normally set at 1 0 nautical miles for standard approaches and 5 nautical miles for COPTER approaches. Deviations from normal will be clearly depicted on the approach charts.
b. In flying outbound from the approach fix to execute the procedure turn, normally fly a minimum of 1 minute. This outbound leg may be extended, if
necessary, to lose additional altitude or compensate for adverse wind effects. However, in no event may the distance outbound from the station exceed that published on the approach chart.
16-14. Obstruction clear- ance-mlnimum altitude The procedure turn altitude is the minimum altitude that can be flown until established on the inbound course on approach. The published procedure turn alt~ude will provide a minimum of 1,000 feet of clearance in the procedure turn maneuver area. In flying outbound from the approach fix, the aviator would
Figure t8-6. Teardrop turn
15 DECEMBER 1984 UPDATE oFM 1-240
normally descend from the route segment altitude (airway or feeder) to the procedure turn altitude. This descent may vary between a few hundred feet and several thousand feet-or there may be no descent if the feeder route altitude is the same as the procedure turn altitude. The rate of descent is a matter of judgment; however, it should not
exceed a maximum safe nate. A descent rate of 500 feet per minute is recommended for the last 1,000 feet of altitude change. If the aircraft has not arrived at the minimum procedure turn altitude at the lime the turn starts, the descent is continued during the turn until
the minimum altitude is reached. If the altitude over the initial approach fix is unusually high, ~ may be necessary to lose the excessive altitude in a holding
pattern.
16-15. The 45-degree procedure turn
The procedure turn is made at the standard rate of 3 degrees per second. This rate of turn may be increased or decreased, but not to exceed 3!J..degree bank, to allow the aircraft to roll out on the desired track. In aircraft equipped with an integrated flight system which uses a steering pointer, the turn is executed with a centered steering pOinter (approximately a 25-degree bank angle).
OAF
LEE
1\..1<'LEE :-..
--/-
14!

a. I n executing the 45-degree procedure turn, the aviator should normally fly for 40 seconds from the approach course on the procedure turn heading. This timing is calculated so that
the subsequent turn to the inbound
course will be completed when the final
approach course is intercepted.
However, the 40 seconds flying time
must be adjusted if known crosswinds exist. Figure 16-7 illustrates the results when time adjustments are not made. During the turn inbound, the navigation
instruments should be monitored to see
if the turn will result in an interception of
the fhal approach course. When it
becomes obvious that it will not, the rate of turn should be adjusted by increasing
or decreasing the bank angle. If this
action does not line the aircraft with the
approach course, the turn should be stopped or continued depending on the position of the aircraft at a 45.degree intercept heading to the inbound course. When the aircraft's position begins to align with the inbound course, the turn should be continued and appropriate wind drift correction applied.
:... ~ 1\
UNDERSHOOT ~ I OVERSHOOT
, 1
,
~ I
t I
I t I I
Rgure 16-7. Improper procedure turn patterns caused by wind effects
150 15 DECEMBER 1984 UPDATE .FM 1-240

b. Adjustment of the 40 seconds flying
time is based upon the known or estimated drill correction required to fly the track outbound. An allowance of 1
second for each degree of drift
correction used on the outbound ieg
should be applied to the 40 seconds flown on the leg of the procedure turn. Figure 1!H1 shows the aircrall holding a
10-degree drift correction flying outbound for 1he procedure turn. Aller turning left 45 degrees, the aircraft will be headed into the wind and will fly for 50 seconds.
16-16. Missed approaches If the instrument approach and landing
cannot be completed successfully, a
missed approach procedure will be executed. This procedure is published on the approach chart and normally is
supplemented by further instructions and clearances from the controller.
WIND
0
FACILITY
e - 8- -
OUTBOUND LEG
Figure 16-8. Adjusting procedure turn for wind effects
15 DECEMBER 1984 UPDATE. FM 1-240 15

a. Procedure. The procedure normally
directs the aircraft to proceed on a
specified course to or from a designated facility and to climb to a specified
minimum altitude. Figure 16-9 shows plan and profile views of aI', instrument approach procedure with the missed
approach procedure printed within the profile view. The aircraft is making the final approach on the 231-degree radial
to the facility and is unable to complete the landing. The aviator should execute a
climbing right turn to 2,000 feet to intercept the 157 -degree radial and
proceed to REHOB intersection and hold.
b. Report. A missed approach must be reported and the reason given (unless initiated by ATC) to the controller as soon as practical after starting the
procedure. The aviator should request
Amch 13
VOR 19
CAIRNS AAF (OZR) FORf RUCKER, ALABAMA RWY 6
CAIRNS A.PP CON \11.-340(' 133.45 237.5 :WS'-l20- 125.4 2J..4.. C""IRNS TOWER / 126.2 2..1.0 GNP CON 121.9 248.2 ClNC Del / 133.75 370.3 ASR/PAR ATiS 121.1.5
----
Al 577 OJ 'us Arn'y)
~. ----
-- l'ìv?;---
OUrF~ , -
--- -fCIII"
FffDfÌj'-- I"~.s"
"""" '-
" '/(/:'-.. '\ 10 I"I["S ó.ABIDE
^'", '" /' ~q, \ o:).':r
\
/
-----
/ /' ,/ /
/
0
I
I I I
I QP'PTQ
/, r::1'" \
>i" \
\
,
'- '" '8' ~
~~~~-- -- "'- j '" /- I HoUND DARED
I
--. -, - ---
/
R8moin VCR ElE\( 298
wilhin KI NM' '13,0
1700~ -.......... 0$/.
MISSED APPROACH Climbing right turn to 20DCI out R.157 aZR
VQR to REHOB INT GIld hold
4
.. .~
"..../
CATEGORY ' . C D TDZE 298
5-6 741)/40 442 (500-~) 740/50 740/6IJ 442 (500-1) .wZ(5OQ.-I'J.) 0"'" CD
CIRCliNG 740-1 760-1 7BO-IV, 860--2
U2 (500-11 0462(.500-1) 481 (500-1\.1;1) 562 (600-2)
$-PAR 6 49B/24 2DD (700-\7) 49B 40 200 20[},\'.) os '1.7"
A
,.
HIRl R~ 6-24. 16-36
VOR RWY 6 3\.ló'N-S'-43'W 19
FOQy ~:KKrR, ALABAMA CAIRNS AAF (OZR)
Figure 16-9. Plan and profile views of an Instrument approach procedure
152 15 DECEMBER 1984 UPDATE. FM 1-240

.
ABEAM I
I
I I I I I I :/HOLDING FIX
\
I 1 INBOUND
/~ NONHOLDING SIDE I
clearance to execute another approach (if feasible) or request clearance and file a flight plan to an alternate airport.
SectIon IV Holding Patterns
16-17. Definition Because of heavy traffic conditions enroute or at busy air terminals, air traffic controllers occasionally will instruct aviators to hold. Holding is the procedure used to delay an aircraft at a definite position and assigned altitude. In some instances, the aviator may be directed to climb or descend to a newly assigned aititude in the holding pattern.
16-18. Configuration The standard holding pattern consists of right turns (fig 16-10) and the nonstandard holding pattern has left turns.
16-19. Timing
a. The initial outbound leg of a holding pattern at or below 14,000 feet MSL
FIX END
,
RECIPROCAL
COURSE
TIMING STARTS OVER FIX
should be fiown for 1 minute. Known adverse head winds or tail winds may make it necessary for the aviator to extend or reduce the 1 minute to achieve as close as possible to a 1 minute inbound time. Above 14,000 feet MSL, the leg should be flown for 1 Y2 minutes. This applies unless otherwise specified in the approach chart or in the ATC clearance.
b. Since holding is concerned with time. inbound and not distance inbound, it is not necessary to know the wind velocity. By using the computer side of the dead reckoning computer, the aviator can determine the time outbound that will result in 1 minute inbound. For example: Ou1bound time of 1 minute results in time inbound of 26 seconds. To determine the outbound time, set 26 on the inner scaie under 60 on the outer scale. Then the required time outbound of 139 seconds can be read under the speed index.
c. Outbound timing (fig 16-11) begins over or abeam the holding station, whichever occurs later. The position abeam the station can be determined by
HOlDING SIDE
OUTBOUND
Figure 16-10. Standard holding pattern
e :E ~ w
'" ~
I I I
I
Figure 16-11. Outbound timmg 15 DECEMBER 1984 UPDATE. FM 1-240
a change of the TO-FROM indicator or by setting the course selector to a radial 90 degrees from the approach course. When the needle centers, the aircraft is at the abeam position. The RMI is used to determine the abeam position for both VOR and ADF holding. When the appropriate bearing pointer pOints to a
heading 90 degrees to the holding course, the aircraft is at the abeam position. During intersection holding, outbound timing is started when the aircraft has completed its outbound turn and is wings level on the outbound heading. Outbound time will be adjusted to achieve the desired inbound time.
d. The procedure for determining the abeam position as discussed În c above will not be affected by the aircraft heading. Outbound timing should begin when anyone of the indicators identifies the abeam position regardless of the outbound heading.
16-20. Airspeeds Maximum indicated airspeed allowed for holding is 175 knots for all propeller-
.
HOLDING
COURSE
OUTBOUND END
1
TIMING STARTS ABEAM FIX
153

driven aircraft and helicopters. However, helicopters using holding patterns depicted on COPTER instrument approach charts will fly 90 knots
maximum indicated airspeed. Different speeds are allowed for civil and military
turbojet aircraft, depending on holding
altitude and aircraft category as listed in
current navigation publications. Aircraft
operating en route at normal cruise
airspeeds higher than the maximum
authorized for holding are required to
reduce airspeed 3 minutes or less from
the holding fix.
16-21. Turns Malle all turns during entry and whiie holding at: (1) 3 degrees per second, or (2) not to exceed 3D-degree bank angle,
or (3) 25.degree bank angle, provided a
flight director system is used.
16-22. Entry
a. Pilot action.
(1) Cross the holding fix initially at or
below maximum holding airspeed. If
required, effect speed reduction 3
minutes or less from the holding fix. " (2) Compensate for known effect of
: wind, except when turning.
STANDARD PATTERN
(3) Determine entry turn from the
aircraft heading upon arrival at the holding fix.
b. Standard holding paltern entry. (1) Refer to the letters on figure 16-12
in applying the following instructions: (a) Parallel procedure-parallel the
holding course, turn left, and return to the holding fix or intercept the holding
course. (b) Teardrop procedure-proceed on
the outbound track of 30 degrees (or
less) to the holding course; turn right to
intercept the holding course. (c) Direct entry procedure-turn right
and fly the pattern.
. . ..... .....................,.. ..."'"'''' ............. ........................ . ...........,.... ..... ............ ............. .... .......,..... ............ ...,........ ......,........ ... ................. ,...,...............'" . . . . . . . . . . . . . . . . . . . . . . . . . . .
.,...........,..,.......... ........................
(b('
154
... .... .... .... ,... ... ..
Figure 16-12. Holding'pattern entry
15 DECEMBER 1984 UPDATE. FM 1-240

(2) Distance measuring equipment (DME) holding is subject to the same entry and holding procedures as in a and b above except that distances (nautical miles) are used in place of time values. The outbound course of a DME hoiding
pattern Is called the outbound leg of the
pattern. The length of the outbound leg will be specified in the procedure chart or by the controller. The end of the outbound leg is determined by the appropriate odometer reading. When the inbound course is toward the navigational aid, the fix distance is 10 nautical miles, and the leg length is 5
NAVAID
I..
nautical miles, then the end of the outbound leg will be reached when the odometer reads 15 nautical miles (fig 15-13). When the inbound course is
away from the NAVAID, the fix distance is 28 nautical miles and the leg length is 8 nautical miles, then the end of the outbound leg will be reached when the odometer reads 20 nautical miles.
(3) Nonstandard holding pattern entry. The fix end and outbound end turns are made to the left. Entry procedures to a
nonstandard pattern are oriented in
relation to the 70-degree line on the holding side just as in the standard pattern.
16-23. Departure
a. When cleared by the controller to leave the holding fix, the aviator departs the pattern from over the fix. An exception to this occurs when the controller specifically slates "cleared from your present position. . . ." If the controller has specified a departure fime, the holding pattern is adjusted so that the aircraft is over the holding fix ready to depart at the specified time. If an aircraft is holding on the published final approach course at an approach fix and receives clearance for the approach, the final approach is begun from the holding
END OUTBOUND LEG \
-
DME FIX
10 NM . I
28 NM
'\ -
~O N NAVAID - ~
- -
~ I
END OUTBOUND LEG Figure 16-13. OME holding
15 DECEMBER 1984 UPDATE -FM 1-240 155

pattern without executing the
conventional procedure turn.
b. Sometimes an aircraft is held by the
aviator on the nonprocedure turn side of
the final approach course. If so, the
aircraft must execute the procedure turn
on the procedure turn side of the final
approach course if a descent to
procedure turn altitude is necessary.
NOTE: At some locations, beginning the final approach from the holding pattern
may be prohibited by notes published on
the approach chart. When this occurs, a
standard procedure turn will be flown.
16-24. Drift correction
a. Always compensate for known
effect of wind except while turning. Sometimes no attempt is made to
correct for adverse effects of crosswinds
while holding. In this case, the turn inbound will either overshoot or undershoot the hoiding course depending on the direction of the wind (fig 16-14).
b. If the same amount of drift
correction is flown for both inbound and outbound legs (but applied in opposite directions), the outbound leg will parallel the inbound leg. However, the turns will still be wide or tight, respectively. The aviator has little control over the aircraft's track while turning. Therefore, the track of the outbound leg is adjusted
to avoid turning short of or overshooting the holding course due to effects of wind
drift.
------ ------ -- -----""""', /,-- \
I \
I I
I Z'" \ '
; - ./ \ ----- ,
'-8 íiì
(") RIGHT CROSSWIND OUTBOUND
w ,--- " -- ~ -- I --- I -- -- I -- --- \ -- -... , " ,
, """-~
156
~ I
I
-...- /
......---' (8) lEFT CROSS WINO OUTBOUND
Figure 16-14. Wind eflect on holding pattern flight
15 DECEMBER 1984 UPDATE. FM 1-240

c. For holding pattern drift correction-
(1) Determine the correction necessary to maintain the track inbound.
(2) Double the inbound correction and apply it in the opposite direction while flying the outbound leg. Or if the inbound correction is over 1 0 degrees, use an outboard correction of1 0 degrees plus the inbound correction.
NOTE: This guide must be adjusted to fit each situation. Analysis of the initial inbound turn (overshooting or undershooting) should be used as a
basis for a subsequent adjustment.
d. Two examples of applied drift correction are shown below.
(1) In (A) of figure 16-15, the inbound correction is 5 degrees right; therefore, the correction used outbound is 10 degrees left.
(2) In (B) of figure 16-15, the inbound correction is 15 degrees left; therefore, the correction used outbound is 25 degrees right.
16-25. Clearances and reports a. When delivering an ATC clearance
for hoiding at a fix with a depicted holding pattern, the controller gives the following information in the order shown:
(1) Direction to hold from the holding fix.
(2) Name of the holding fix. (3) Statement that the holding pattern
is depicted ("as published"). (4) Time to expect further clearance
(EFC).
b. If the holding pattern is not depicted, holding instructions are issued as follows:
(1) Direction to hold from the holding fix.
(2) Name of the holding fix. (3) Radial, course, bearing, airway, or
jet route on which the aircraft is to hold.
~ ~-_.._--------- -',
\
\ ,
~.
I \
\ "
(AI LEFT CROSSWIND OUTBOUND
~
-- - - - - -
-- - - - - -
-
-- --- III RIGHT CROSSWIND OUTIOUND
Figure 16-15. Adjusting holding pattern tor wind effect
15 DECEMBER 1984 UPDATE oFM 1-240
&- , ,
\ \
\
I I
I
.......
157

(4) Leg length in miles if DME or area navigation (RNAV) is to be used. Otherwise, leg length in minutes if
requested or if ATC considers it
necessary , (5) Direction of holding pattern turns if
left turns are to be made. (6) Time to expect further clearance.
c. Typical clearances are shown
below. (1) "Cleared to AJAX VOR, hold south
as published, expect further clearances
at 1930" (fig 16-16, A).
(2) "Hold south of the AJAX VOR on the 180-degree radial; expect further
clearance at 1930" (fig 16-16,B). (3) "Hold northeast of Cliff on Victor
21, left turns, expect further clearance at 2050" (fig 16-16, C).
d. If not in radar contact, the aviator is
required to report the time and altitude
reaching a holding fix or point to which
cleared and to report leaving any
assigned holding fix or point.
16-26, Stacking a. Stacking is the procedure when two
or more aircraft are holding one above the other at the same fix. As the lower
i aircraft leaves the stack to complete its
i approach, the aircraft above it is cleared to the next lower holding altitude. This
, clearance is given after the pilot of the
i approaching aircraft has reported that he
i is vacating his altitude and leaving the
, radio facility inbound. The second aircraft is cleared for an approach when the first
aircraft is sighted by the tower. It is also
cleared when the tower considers that a
normal, safe landing will be accomplished.
b. Tfte length of time an aircraft is
required to hold in a stack depends upon
the time required by the aircraft in the
lower positions to land. Since the delay
may be of considerable duration, the pilot should fly at an airspeed and power setting which will provide fuel economy, but still permit adequate aircraft control.
16-27. Instrument approach briefing Even the aviator with vast instrument flying experience will make a safer
instrument approach by using a copilot.
Before the flight, the copilot should be
briefed and made to understand the
duties to be performed. This is especially
important on the most critical phase of
an instrument flight-the approach and landing, In addition to any other duties
assigned the copilot, the following duties
are deemed important to the execution of a safe approach and landing. The copilot should-
a. Monitor all engine instruments and
warning lights.
b. Be sure that the correct approach chart is being used.
c. Know at all times the position of the
aircraft in the approach pattern.
158
AJAX VOR
~~. / Ì''-' \;'0 .~
.' .' . I
- I
< ....-' i5 .. ..
AJAX VOR
'NOTE
0
0 ~
0 0 ~
A. HOLDING AT FACILITY (DEPICTED PATTERN)
B. HOLDING AT FACILITY
(NO DEPICTED PATTERN)
C. HOLDING AT VOR INTERSECTION
(NO DEPICTED PATTERN)
.NOTE. DOTTED LINES INDICATE PATTERN TO BE FL.OWN.
HOWEVER, THE LINES DO NOT APPEAR ON CHARTS
Figure 16-16. Holding patterns flown for typical clearances
15 DECEMBER 1984 UPDATE 'FM 1-240

d. Crosscheck flight instruments and radio navigation instruments for malfunction.
e. Check that altimeters are set at the correct barometric pressure.
f. Take time to check all altimeter indications. (The pilot may misread the altimeter.)
g. Verify all fixes that are determined during the approach.
h. Keep close watch on the altimeter on the final approach segment and notify the pilot when he is approaching 100 feet above the DH or MDA (whichever applies to the approach) and when he is approaching DH or MDA.
i. Watch for the approach lights or runway to come into view. Do not inform the piiot that they are in view until positive that they will remain in view and the approach can be continued visually to a landing.
j. Be prepared, on breakout and field . in sight, to take the aircraft controls and make the visual approach and landing if requested by the pilot.
k. Be prepared to execute a missed approach.
Chapter 17 Instrument Approach Procedure Charts
Figures 17-1 through 17-20 (pages 162 through 175) are located at the end of this chapter.
17-1. General The Cairns Army Airfield (AAF) VOR runway 6 and the ILS or NDB-1 runway 6 approach charts (figs 17-1 and 17-2) are typical of those found in current navigational publications. Their format and general data presentation are used as a guide. (For current and detailed explanation of approach chart symbols, consult the flight information publication instrument approach procedure charts and their legends that are printed with each volume.)
17-2. Legend pages Legend pages contain the plan view symbols, profile information, and airport diagram information. Figures 17~, 17--4, and 17-5 are legend pages to the instrument approach procedure charts. General information and abbreviations are shown in figure 17-ß.
17-3. Concentrfc rfngs Concentric rings (fig 17-7) are used when it is necessary to chart facilities Which lie beyond the chart area If the procedure was charted to scale. The rings are normally centered on the approach facility.
17-4. Chart format Each approach chart (figs 17 -ß and 17-9) consists of the five sections shown below.
a. Margin identification. b. Plan view. c. PrOfiie view. d Landing minimum section (and
notes). e. Airport sketch.
17-5. Margin Identification The chart title (fig 17-1 0) includes the page number, chart reference number, agency originating procedure, type of approach or procedure such as VOR, NDB, ILS, or localizer. The runway airport, city, and state are also included. Charts which include the word "COPTER" in the title are for the exclusive use of helicopters. The procedure identification is derived from the type facillfy prOviding the final approach course guidance and runway number. This is when the approach COurse is within 30 degrees of the runway centerline such as VOR RWY 6.
17~. Plan views A plan view (fig 17-11) is a wide-angle view of the entire procedure. Information pertaining to the initial approach segment, including procedure turn, minimum safe altitude for each sector, courses prescribad for the final approach segment and obstructions is portrayed in this section. Navigation and communication frequencies are also listed on the plan view.
a. Formal. Normally, all information within the plan view is shown to scale. Data shown within the 10-nautical miie distance circle is always shown to scale (fig 17-7). The dashed circles, called concentric rings, are used when all information necessary to the procedure will not fit to scale within the limits of the plan view area. These circles then serve as a means to systematically arrange this information in their relative position outside and beyond the 10-nautical mile distance circle. These concentric rings are labeled Enroute Facilities and Feeder Facilities.
b. Enroute Facilities Ring. (See fig 17-7.) Radio aids to navigation, fixes and intersections that are part of the Enroute Low Altitude Airway structure and used in the approach procedure are shown in their relative position on this Enroute Facilities Ring.
c. Feeder Facilities Ring, (See fig 17-7,) Radio aids to navigation, fixes and intersections are used by the air traffic controller, They are used to direct aircraft to intervening facilities/fixes between the enroute structure and the initial approach fix, This is shown in their relative position on the Feeder Facilities Ring, Sometimes the initial approach fix is part of the emoute structure, If this is the case, there may be no need to
15 DECEMBER 1964 UPDATE oFM 1-240
designate additional routes for aircraft to proceed to the initiai approach fix, In some cases, however. it is necessary to designate feeder routes from the enroute structure to the initial approach fix, Only those feeder routes which provide an operational advantage shall be established and published, These should coincide with the local air traffic flow. The length of the feeder route shall not exceed the operationai service volume of the facilities which provide navigational guidance, The exception is if additional frequency protection is provided, Enroute airway obstacle clearance criteria shall apply to feeder routes, The minimum altitude established on feeder routes shall not be less than the altitude established at the IAF,
d, Radar availability, (See fig 17-11.) This is indicated below the communications information by the appropriate and applicable letters "ASR," "PAR," or "ASR/PAR." These terms are applied as follows:
(1) ASR-means an Airport Surveillance Radar instrument approach procedure is available at the airport,
(2) PAR-means a Precision Approach Radar instrument approach procedure is available,
e, Initial approach, (1) In the initial approach, the aircraft
has departed the enroute phase of flight and is maneuvering to enter an intermediate or final segment of the instrument approach,
(2) An initial approach may be made along prescribed routes within the terminal area which may be along an are, radial, course heading, radar vector, or a combination thereof. Procedure turns, holding pattern descents, and high a~itude tear-drop penetrations are initial approach segments,
(3) initiai approach information is portrayed in the plan view of instrument approach charts by course lines with an arrow indicating the direction, Minimum aititude and distance between fixes are also shown with the magnetic course,
t, Approach COUrse. The approach course is published on an ILS procedure that does not require a procedure turn (NoPT),
(1) In the case of a dog-leg track and when there is no fix depicted at the point of interception on the localizer course, the total distance is shown from the facility or fix to the LOM or to an NDB associated with the I LS,
(2) The minimum altitude applies until the glide slope is intercepted, at which pOint the aircraft descends on the glide slope,
(3) When the glide slope is not utilized, this minimum a~itude is maintained to the LOM (or to the NDB if appropriate),
g, Procedure turn, A procedure turn is prescribed when it is necessary to reverse direction to establish the aircraft
{59

inbound on an intermediate or final
approach course. It is a required
maneuver except when the symbol NoPT is shown, when radar vectoring is
provided, when a holding pattern is
published in lieu oj procedure turn, or
when the procedure turn is not
authorized. The altitude prescribed for
the procedure turn is a minimum altitude
until the aircraft is established on the
inbound course. The maneuver must be
completed within the distance specified
in the profile view. (1) A barb indicates the direction or
side of the outbound course on which
the procedure turn is made. Headings
are provided for course reversal using
the 45-degree-type procedure turn.
However, the point at which the turn may
be commenced and the type and rate of
turn is at the aviator's discretion. Some of the options are the 45-degree procedure turn, the racetrack pattern, the
tear-drop procedure turn, or the 80- to
260-degree course reversal. Some
procedure turns, specified by the
procedural track, must be flown exactly
as depicted. (2) There are limitations on procedure
turns. (a) In the case oj a radar initial
approach to a final approach fix or position, a timed approach from a
holding fix, or when the procedure
specifies NoPT, the aviator may not
make a procedure turn. The exception is
when the aviator receives final approach
clearance, he advises ATC and a
clearance is received. (b) When a tear-drop procedure turn is
depicted and a course reversal is
required, this type turn must be
executed. (c) When a holding pattern repiaces
the procedure turn, the standard entry
and the holding pattern must be followed
except when radar vectoring is provided
or when NoPT is shown on the approach
course. As in the procedure turn, the
descent from the minimum holding
pattern altitude to the final approach fix
altitude (when lower) may not commence until the aircraft is established on the
inbound course. (d) The absence of the procedure turn
barb in the plan view indicates thaf a
procedure turn is not authorized for that procedure.
(3) A procedure turn is not required
when the symbol NoPT appears on an
approach course shown on the plan
view. If a procedure turn is desired, ATC
approval must be obtained and the procedure turn altitude must be maintained until established on the
inbound course.
17-7. Profile views Profile views (figs 17-12 and 17-13) show a side view of the procedures.
These views include the minimum
altitude and a maximum distance for the
160
procedure turn, altitudes over prescribed
fixes, distances between fixes, and the
missed approach procedure.
a. Precision approach glide slope
intercept attitude. This is a minimum
altitude tor glide siope interception after
completion of the procedure turn. It
applies to precision approaches and,
except where otherwise prescribed, also
applies as a minimum altitude for
crossing the final approach fix in case
the glide slope is inoperative or not used.
b. Stepdown fixes in nonprecision
procedures. A stepdown fix may be provided on the final, such as between the final approach fix and the airport for
the purpose of authorizing a lower MDA
after passing an obstruction. This
stepdown fix may be made by an NDB
bearing, fan marker, radar fix, radial from
another VOR, TACAN, or by DME. Normally, there is only one stepdown fix
between the final approach fix and the
missed approach point. If the stepdown fix cannot be identified for any reason, the altitude at the stepdown fix becomes
the MDA for a straight-in landing.
However, when circling under this
condition, the aviator must refer to the
minimums section of the procedure for
the applicable circling minimum (figs
17-14 and 17-15, for example).
c. Missed approach point. It should be
specifically noted that the missed .
approach points are different for the
complete ILS (with glide slope) and the
localizer only approach. The MAP for the
ILS is at 1he decision height while the
"localizer only" MAP Is usually over the
(straight-in) runway threshold. In some non-precision procedures, the MAP may
be prior to reaching the runway threshold
in order to clear obstructions in the
missed approach climb-out area. In
nonprecision procedures, the aviator can
determine when he is at the MAP by tirning from the final approach fix. The FAF has been clearly identified by use of
the maltese-cross symbol in the. profile
section. The distance from FAF to MAP
and time and speed table are found
below the aerodrome sketches (fig
17-18). This does not apply to VORl DME procedures or when the facility is
on the airport and the facility is the MAP.
17-8. Minimums section
a. The same minimums apply to both
day and night operations unless different
minimums are specified at the bottom of
the minimum box in the space provided
for symbols or notes.
b. The minimums for straight-in and circling appear directly under each
aircraft category. When there is no
division line between minimums for each
category on the straight-in or circling
lines, the minimums apply to two or more categories under the A, B, C, or D.
The S-Iocalizer 2 minimums are the
same for Categories A and B, but
different for Categories C and D. The circling minimums are the same for A
and B and individually different for C and
D. c. The VOR Rwy 13R procedure (fig
17-15) authorizes minimums for aircraft
with one VOR receiver. Lower minimums
are authorized if the aircrait also has a
DME receiver and the Intersection is
identified. (See fig 17-13 for minimums.)
The requirement for dual VORs is not
applicable to Army aircraft. Off-tuning
from the approach NAVAID to identify an
approach fix is authorized. Dual VOR approach minimums apply. Extreme
caution should be used when the fix is
within two miles of the missed approach
point. Knowing capabilities and proficiency should be the deciding
factors when off-tuning to identify a fix.
d. The weather planning minimums
must be recomputed when the MDA of
DH has been raised due to using a
remote altimeter setting. In some cases, the new minimums will be shown in the
minimum box (fig 17-16). When not
shown, the method in figure 17-17 will
be used to compute the new weather planning minimums.
e. During pre-flight planning prior to
departure on an IFR flight plan,
reference should be made to instrument
approach charts. This is to determine
whether an IFR departure procedure for
obstruction avoidance has been
established. Take-off minimums are
standard unless the symbol is shown
under the minimums box indicating that
the separate listing should be consulted.
(Fig 17-19 shows an example of this
listing.) f. The minimum rate of climb quoted in
the IFR take-off minimums and departure
procedures section quotes figures in
feet-per-nautical mile. The rate-of-climb
indicators in aircraft are measured in feet
per minute. Therefore, a rate-of-climb table has been developed (fig 17-20) and will appear in Instrument Approach
Procedure volumes in the near future.
The proposed location will be immediately following the IFR take-off
minimums and departure procedures
tabulation.
17-9. Alternate airport Use of an alternate airport is sometimes
required in filing an IFR flight plan (AR
95-1). If so, reference should be made
to the instrument approach procedure to
be used for the alternate selected to
determine alternate airport minimums. If
the airport is not authorized for use as
an alternate, the letters "NA" will follow
the symbol under the minimum box.
NOTE: If the aviator must proceed to the
alternate airport, the alternate ceiling and
NOTE: For figure 17-14, the S-ILS 2 visibility minimums are disregarded. Also,
minimums apply 10altfour categories, the published landing minimum is
15 DECEMBER 1984 UPDATE' FM 1-240

applicable for the new destination utilizing facilities as appropriate to the procedure. In other words, the alternate airport becomes a new destination and the aviator uses the landing minimum appropriate to the type of procedure selected.
17-10. Straight-In minimums Straight-in minimums are shown on instrument approach procedure charts. This is when the final approach course of the instrument approach procedure Is within 30 degrees of the runway alignment. It can also be when a normal descent can be made from the IFR altitude shown on the instrument approach procedures to the runway surface. When e~her the normal rate of descent or the runway alignment factor of 30 degrees is exceeded, a straight.in minimum is not published and a circling minimum applies. The fact that a straight-in minimum is not published does not preclude the aviator from landing straight-in if the active runway is in sight in sufficient time to make a normal landing. Under such conditions and when ATC has made clearance for landing on that runway. the aviator is not expected to circle even though only circling minimums are published. If the aviator desires to circle at a controlled airport, ATC should be advised.
17-11. ClrcHng minimums The circling minimums published on the instrument approach chart provide adequate obstruction clearance and the aviator should not descend below the circling altitude until the aircraft is in a position to make a final descent for landing. Sound judgment and knowledge of his and the aircraft's capabilities are the criteria for determining the exact maneuver in each instance. This is because the airport design, the aircraft pos~ion, altitude and airspeed must all be considered. The following basic rules apply.
a. Maneuver the shortest path to the base or downwind leg as appropriate under minimum weather conditions. There is no restriction from passing over the airpor1 or other runways.
b. Recognize that many circling
maneuvers may be made while VFR flying is in progress at the airport. Standard left turns or specific instruction from the controller for maneuvering must be considered when circling to land.
c. Notice airpor1s without a control lower. It may be desirable to fly over these airports to determine wind and turn indicators and to observe other traffic which may be on the runway or lying in the vicin~ of the airport.
17-12. Missed approach a. There are various terms in the
missed approach procedure which have specific meanings with respect to
climbing to altitude, executing a turn for obstruction avoidance, or for other reasons. Examples include the following:
(1) "Climb to" means a normal climb along the prescribed course.
(2) "Climbing right turn" means a
climbing right turn as Soon as safety permits, normally to avoid obstructions straight ahead.
(3) "Climb to 2400, turn right" means climb to 2400 feet prior to making the turn, normally to clear obstructions.
b. When the missed approach procedure specifies holding at a facility or fix, holding shall be in accordance with the holding pattern depicted on the plan view, and at the minimum altitude in the missed approach instructions, unless a higher altitude is specified by ATC. An alternate missed approach procedure may also be given by ATC.
17-13. Procedural component operation
a. Operative runway lights are required for night operation.
b. When the facility providing course guidance is inOPerative, the procedure is not authorized. On VOR/DME procedures when e~er VOR or DME is inoperative, the procedure is not authorized.
c. When the IlS glide slope is
inoperative or not utilized, the published straight-in localizer minimum applies.
d. Compass locator or precision radar may be substituted for the IlS outer or middle marker.
e. Surveillance radar may be a
substitute for the IlS outer marker. DME, at the glide slope site, may be substituted for the outer marker when published on the IlS procedure.
f. Facil~jes that establish a stepdown fix, such as 75 megahertz FM, off course VOR radial, are not components of the basic approach procedure. Applicable minimums for use, therefore, both with or w~hout identifying the stepdown fix, are published in the minimums section.
g. Additional methods of identifying a fix may be used when authorized on the procedure.
17-14. Runway vlaual range (RVR) minimums To authorize RVR minimums, the following components and visual aids must be available in addition to basic components of the approach procedure:
a. Precision approach procedures. (I) RVR reported for the runway. (2) High intens~ runway light (HIRl). (3) All wealher runway markings. b. Nonprecision approach procedures. (I) RVR reported for the runway. (2) HIRl. (3) Instrument runway markings. c. Inoperative RVR minimums. Where
RVR visibility minimums are pUblished and the runway markings become unusable, the necessary adjustment will
IS DECEMBER 1984 UPDATE. FM 1-240
be accomplished by NOTAM and by air traffic advisory. Sometimes RVR minimums for take-off or landing are published in an inslrument approach procedure, but the RVR is inoperative and cannot be reported for the runway at that time. In this case. it is necessary Ihat the RVR minimums which are specified in the procedu re be converted and applied as ground visibility in
accordance w~h Ihe M ETAR Conversion Chart located in instrument approach procedure volumes.
161

..... 13
VOR RWY 6 .. CAIRNS AAF (OZR)
FORT RUCKER ÂLA606.MA Al.577.03 (US A.",yj
- -
,';;;;;--
ou,,~ ,~
-- all;::-
FffDffi'''' 'if oS'
10
,c-..qC'/~ "'.ð:~8IDE .
"'", '" / i~' \
\ 7~9/!..
C....IRNS ;.n CON 121.-:)44. 133.45 237.5
~. -12Oa 125..4 234.4 CAIRNS TOWER / 126.2 2.41.0
GND CON 121.9 '2A8.2 CLNC DEl
,/ \33.75 370.3/ Þ-9.!PM ,..TlS
'
12U5 37.4.3
I I ~
O~
?"
----
/' ---- -- /" / /
/
/
\ ~
CRESTVIEW (Fie)
115.9 CEW ==. \ Chen 106
~ -:e b" iE~=;,. 1/3.B) --:::.....
w_. '6B~Þ (23.8)
0/, ".,}
0""' I
'l7ó" 0 -P
Ó ~ ~ ~
~~ f \( "'" ~~Ê .'HOB
~~. / /
~ 'Ig,,"!- -
.'\ ~ / "'-- j" /-l HoUND '\ /' DARED
..-/' -.....c --- ElEV 298
RlIII\Oin
within 10 Nt;. '/.'!.,'
1700~ --........ 05,.
voo M.ISSED APPROACH
Climbing riQht Nr'n to 2000 out A-157 OlR
VOR to REHOB INT and hold
~ ./ ,...,"~...
CATroORY
....
.. . c 0 TO" ... 7.0/.0 ... (soo-..I 7.0/50 7.o/6IJ ..~:i:'~
A4$'2 (300-,) 442 (500-114) ~./@ 7.0.-1 760-1 780-1 !'I 860-2
.w:z (500-1) 462(~1) 482 (500-11'l) 562 600-2
~98/2~ 200 (200- JI,) ~9 200 2QO.~) GS 2.7"
36
CMtCltNG
....... .. Hill Rwp 6-2.4, 18-36
VOR RWY 6 3'816'N-8JO,c3'W
..
FORT RUCKER, AlAßA.M,I.,
CAIRNS AAT- (OZR)
Figure 17-1. Cairns VOR RWV 6 approach chart
162 15 DECEMBER 1984 UPDATE. FM 1-240

-- -- --- ------... ----- ~
/ ~
/ /----------...",
A""dt II/Arndt 13
ILS or NDB-l RWY 6 CAIRNS APP CON 11'~-344~ 133.45 137.5 34~8-1208 125.4 234.4 CAIRNS TOWER 126.1 241.0 OND CON 121.9 248.1 / QN(: DEl 133.75 370'13 ASR/PAR: ATIS
121.15 37..3 /
10..,0 /
/' /BOll WEE \Ill
0 ~BVG ~
r'Q "
I
\
\ \ '0 \ :(~" ":..,
,~~
~~q, ~r:I{I' ""t
~
'. ~''Es
Procedur. turn
not autharizM """'241g
lOM 1989
I
.. 061'_/ 2000
One miftllle
holding paft8rn OS 2.70' ""iëH'"16
"
Al 577 02 \U5 A.myl
688 ^
CAIRNS AAF (OIR) FORT RUCKER, AlABAMA
"" "" '.ðABIDE
~;\ ".
~
\ ~\ \
REHaB / / \ 0.
~d
:"/ / .~
"'0. -
, ,
",,~./
CATfGORY S-ILS 68 -~,-- ~
t -----"'8'~
28; - -
- . /
---- I
----- --- li DARE~
-- MISSED APPROACH ElEV 298 ClimbÎn1l riQIII tIIrn to
2QCX) vio OZR VQR R.157
to REHOB INT and .hoId 8115 climb to 700' bet<<e
S-tOC .
. .
498/24 200 (200-~J
660/040 362
5-NDII . 7040/040
7.w-1 442 (.500-11
498/24
"'2 {300-\'.J
760-1 ~2 (SOO-I)
2QO (200--1'l1
CIRClING
S-I>... ...
ItS or NDB-l RWY 6
C D
498/040 200 1200-"1
660/50 3621.&00-1)
7040/50 740/60 "'2 1500-1) 4012 (500-1V.)
780-1~ 860-2 .c82 1500-11;1 S62 (600--2)
498/040 2DD (200-,,) GS 2.7'
(400-\U
31816'N-8$80'W
18
~
~
to,.
"', ~.:.:. ~
'@ "-
061" S.6 NM From lOM
36
HlRl awyt 6-2., 18-36 ND6 lOC FAf to MAP 5.6 NM
Knob 60 90 120 150 180 Min:Sec $,36 3,..., 2,14 1,~2
fORT RUCKER. AlABAMA CAIRNS AAF (OIR)
Figure 17-2. Calms ILS or NDB-1 RWY 6 approach chart
15 DECEMBER 1984 UPDATE. FM 1-240 163

lEGEND INSTRUMENT APPROACH PROCEDURES (CHARTS)
TERMINAL ROUTES
PLAN VIEW SYMBOLS OBSTAClES
.
Proc",dute Trock
"" ... L'"
.-. Procedure Ivr...
(type. deg...e ond point 01 turn apj,cooll
...., ' .. ............,.
M;~~",d Approoch -------~ vl~uol Fl.ght Porh
3100 NaP! .5 6 NM 10 G5 Inter' 045
1},47 to lOMI .
2000 M,n,mum Altitude
~'55 (151J MoIeog'-'
Pe"elrole, Spe~,ol Use A"spoce
HOlDING PA.TTERNS
c: 270., 090.~
Ini..",,, oi P,ocedure iv,,,
C2JO' 090~~
Arrlyol Holding Pon",.n
,....-:','" .
M",\ ,
A"1"""" 11<;"""1 "1)911 -.
l1m,h will. only be spet,I'ed when in"y d"""ole trem Ihe s,..:",do.d. OM~ i'~es may be ,hown-
REPORTING POINT IFIXES
Repor1u'9 POlMt Å Compulsory L::.. Non C.ompulsory
þ "... f-." or In1ened,on
ARC/DME/RNAV F,,,
----.-_____.L-- ----- I
Radial I,ne cnd ,",olue R I'.U- ------
-- j~ ,""h------- lead Rad,ol
MINIMUM SAFE ALTITUDE (MSA)
rï4õQ1 M5A wit",n 15 NM unle~~ otnerwi~e
~ ,ndlCoted IEm..rgency U~e Only 1
~ (Arrow~ on d'~lon.:e clrde identity Sectou) /-/..:'.1-
....
Focillty Ident,f,er --.- (\-.f! :)~ ~
r": ~':1
-
. Spot Uevo110n . Hi9ne~t Spot Elevotion
A Ob~10d.. A Gro....p 01 Ob!tode! ^ Higne~1 Ob~,ocle~ ~ Doubtt....1 A.:.:...rocy
SPECIAL USE AIRSPACE Ii! Re\lrkted P Protl1bited WWorning A-Alert
~ RADIO AIDS TO NAVIGATION
!!2..! Underlone ìnd'cote~ No Voice tror:smitted on
Ih" Ireq~ncy DME I~ymbol moy be uied with VOR, NOR, or lOCI
VOR V'TACAN If:JVORTAC feed~'r Routl?'
0 0
0 NDB (Non d,rectionol Radio Beocon1
< 0 > LOM (Compon Lo.:otor)
<=::> c===> Marker Beacon~
Loco1i2er Cour!e
SDF Coun..
ø lOC/lDA/SDF TroMm,lIe. l~hown when .n,'ollolion '1 ot\,e1 trom ih normal po!,hon 011 the." end oi the runwoy\
..} WI>.YPOINT (WPT)
WoypOlnl Dotn
PRAY'::, 3Bo5B.3'N 89"515W
112,~ CAP 1871" 561 '90
WOYPO;nl Nome. Coord,nal..\
Frequency. òdO!"nt,lier. Rod'ol!O,~ton{t. (Facllily to Woypo,n1'
RO!"terO!"nce Foc,hty I:levol,on
MISCElLANEOUS
J CnongeovO!"r Poml
v.{"?-'( D,!1once Not 10 xol..
@ Helicopte' Ali9"h09 ..u~o
- - . Internotioool Boundary
Figure 17-3. Plan view symbols
164 15 DECEMBER 1984 UPDATE. FM 1-240

I
LEGEND INSTRUMENT APPROACH PROCEDURES (CHARTS)
......- PROFilE ~'J.'19 ......,.
lOM
2400 ith" IOlnNM
-- I Glide Slope Alti1U. d.
- '
W 11'1 01D at Outer Marker/FAf
12S._, ~'] I '_drop Turn"...,-
FM (non'pre<"ion opproache1iJ
Procecb. T...n 11~ ./ 2400
'lit. I "r 1_- Mi,wd Approach Point
- '--1270)1 .. us GIH:Ie Soupe/
Thrnhold (j~de .:~~ ::~HJ.:; 2~ I ~.,~...,~_d Approach 'rocl.
Glide SlosH' IntllKeDt Altitude '/, .....>'~ ~=:~t1e ""-(Non.ProcedUJel
DESCENT fROM HOlDING PA'TERN
~~ V~ ~7. 1600 Ie 127"-1600
-307" -
/'_307" -
" 0
D ~.>o MAP :f)1 ~ finol Àpþfooch
~ /' "'0'. f~ V~'''al Path Computer'
/" 300 (RNAV Dftcentl"""" 3.028 .::::::.:
WPT ~
.,/ .....,.,
FACilITIES/FIXES Al TlTUDES
5500 2300 4800 2200 X Finol Approoc;h Fi~ (FAf)
~ Mi-;;;;;;;:;-m Mo_imum Recommended (tor non.preci1.ìon apprOOCAm.)
Alhtude Altitude Altitude A.hitude -- Glide Slope InIeI'r:epI AItitudeI. precede fix or are arrowed to show wh.e fhI.y appfy
V Visuol tmcent Point (YOP)
l
FM NDI (Rbn)
VOR VQRIAC TACAN WPT
I I I I I FIX
liNT -----~ Viwol F~ght Path n.. non-pfecilÒort FAf mini"",," altitude ,. th8 ~
- the- Glkje Slop8 int8rcep1' attitude unleu otherwis.e .
Runwa'fli - Hard Surface
AIRPORT SKETCH
18 III [E] áh æ H&licopter "'~""no ....~ Hcwds.tonds/To.iwGy1o
Nevøti- Symbok uwd to identify Cop- Procedure
Ia.ding po;"" . D II Â 0
c=:J Other Than Hard Svrtoce
===:: ::~::::~:~
Oosed Runways Under Construcr;an Metal Surtace and Tealw.
TOZE 123 Runway TDZ elevolion . +- Dispkxed Thr"hold 0-8'110 - '-II Total RunwcJ)' ~odi.Rt (shown when runway grodie"t eaceed. 0.3%1
~.rYh ArrlHtin'll Gear
l uni-difectianal ~-diredionol J .181 Sorrier MINIMA DATA
Alternate Minimunn not atiÞndcrd.. USA/USAf/USN pilcm rei.. to ~ appropriatll r~lcrtiom. -
--....... .6.NA IFR mi"imurm are Not Authorized for alternate vw due to unmonitored facility << obs.ence ot wecrthw reporting .."...ce.
Take-ofl Minimums not standard and/~ Departure Procedures ore pyblilhed. Rei.. to tabulation.
. C...ntrol Tower
When ConIrd T~ and RotatirM;! 8eocon ore co-Iacated. Beacon symbol will be used and also i~ as TWR.
...
. Ratoting Airport Beacon.
. U.S. Nervy Optical lonclin<l System (OlS) "OI.S"
Iaccrtion ~ shown because of ~ Mght of
oppro.ifnatetr 7 føt and proaimity to edg8 of
rVftWGy, mat' aecrte on obItrvction tor -- types 01 oiraah.
v
ApprØOl:h liFt tynIbok en '5"- 01'1 0 wp_ote Iepnd
Figure 17-4, Profile Information
15 DECEMBER 1984 UPDATE. FM 1-240
NOTE NOT ALL APPLICABLE TO ARMY, USN, USAF
185

"
LEGEND
AIRPORT DIAGRAMS
SCOPE
Airport diagrams me specifically de!l.igned to anist in the movement of ground traffic at localions wan complex runway/taxiway configurations and provide information for updating Inertial Navigation Sy,t.ms (INS) aboard aircraft. Airport diagrams are not intended to be used for approach and landing or depotlure operations. Requisition for the creation of airport diagrams must meet the above criteria and will be approved by the FAA or DOC on 0
cose-by-cose basis,
LEGEND
Airporl diagram scale, or. varioble. REFERENCE FEATURES
True/magnelic North orientoticIn may Yory from dia- gram 10 diogram.
Building, .
Tanio., .
...... .8
Coordinate yolue,; Ott! !Iohow" În OMI 0) minllte in.
cremenh. They Drt! fur.hl:!" broken down into six (6)
second ticln, wilhin eoch ono (I) minute increment.
Ob,trl.>diol't
""irpart BeocOll
A
.....* Runway Radar ReUeclor' ...1 NOTE:
All new and revi,ed Qirporl diagrams are ,hown refer. enced to the World Geodetic Sys'em (WGS) (noted on
approprlat. diagram). ond mO)' nol be compalible with locQI coordinate1. pubJi,hed In FliP. (Foreign Only)
Control Tower.
Helicopter Alighting Aroo, <ßI æ ffiI&ò.1Ð
"rte"',,; Gear
l "ni.directlonal
~~~f~;op;rn7~~~.~.,.uMd to, _nld CQ.er loceii"
~ bi.di'KliOllol 1J8ta.ar....
. RUNW""V D"TA
I
Hard Surface Other Thcln Hard S"rface
Ix x X xl X X )l Clolod Rul'twoy, TOl:iway Under Con,truclion Overrun" TQl:iwoy,.
Porking ""801
Runwoy Grod,enl
,
0.7% UP
~I t 900011200
E1EV --- Runway End Elevation -
lOA Runway Dimen,ions (In Feet)
field Elevation
". !
Run~oy Idol'tl,f'Co110"
IN 023.2' 10001:200
" --............ Runway Heoding Overr"n Dimon,ion,
(Magnetic) (In fH')
Figure 17-5. Airport diagrams
166 15 DECEMBER 1964 UPDATE. FM 1-240

.
GENERAL INFORMATIOIt & ABBREVIATIONS
"
In.diuIeet CGMroi lOwer or ATIS opowale. -a ga, ICII~. ~ ÎII ftCIUIicai ""i'" j..~1 "'iIibIitr ÎII ~ ...a.. ond Iun.vy Viluaf 10"118 in hundreds 01 ""1. .--or Di-.iom ift Ieet.
E~ in f... Mnin s.o l_1 IMSt). C8tirtgI in ..... aa-. oirparl ...cnion. ,"',bec.iRgIAMdinva/t_18I ..8 ~. "'ÔCOl8l CCIIIIrOI to-. ""''''ür ~ UfN. .
~.... .L . . . .
- COO<
loll.... ,.."....
,...........D........,f_- Approoch l;~ s,wn.
. Approadl CanhI """;"01
'ubli.h8dRcdar~GI this. Airport
. "'VlomcrtOI: t.",iJ1a8 w...-... 5eo'vir..
. . Iodo Coon. . Circl'..g
. C-II"8'Y
0.- . demaM.""""" . .DMi-.ion H.;o;hl
. . DÍltI:mC8 Meoo..-inlill E.....,. . . . 080d leõoninlill
.
. . .a...rtion FinolApproadlFia
.f_Mor~..
.Glid.SIop. . "'òeM Aboo. Air-poart
lWi...htA~londlloo . "'''1# Abo..r'I Toud..:,.....
. . Hovh I~ A~ tlightl lNtioiltJllWOGthFia
.ltItwrtationoi CiwiI.fmuboro o.gatlllotHm
0_- .'''''II8C''I. l..aliz. T~Oir8diotoolAicl londi",
. leod in hghl s,.- 1- In'-"li' RUftWG)' lOghto
.locolo.... L8Cld lødiat "'-cIft GI Ieost 2 NM ICOfIf8r I NM] of !load to _ist.,. ""'''"'''D Dllto .... iMer-ai..,./I",alcø- Mltdiu", Inten,ity Approodo light ~Iem M8dium Inmoaity ApprODdl light $yo""'1 ...oIh .An
. Miued Appr_h Point
..... .
K. C. .
CAT.. .
a-... .
ClNC DEl. 011..
....
.. .
BIY. ,... ,.. 06 .
MM. .... HAl. .
_.. W.. ICAO. . .
...
_. .
Nt, INDN. lOA
l~.. _.. lilt. .
lOC. ...
-. -.. .....
"".. MIl" ~~.tJtitu. . "-'- I~ .u~ 1- Micr-- landi"G s,..m
Nell .toutharõacl . 1'100 di.._"-.411 Itodio leCK:Oll
No ....-..... t..... II.-qlrirwd
(P.oadur. t...... ... """ be _vIMI-otho;outAtC
-., Omnidir.mo-l Appr~ tivhts,.......
.lIodoo~~"" . . . lIadao .-.oriOle ...-d b
.... approodl . II~ A~ IndicCIQ
tiQlhh
Radio hcK- t-.., EM! IÓ8nIif.... tighk
II~ c.n"'1me 1~h8
...- "'_Ncwiga8oon .'~Poinlofl....<eptlÌOIIJ '-err bmafnmg lighk 'iRt 3000' of lIunway Itu""err VOuocII_. """"
. Stooi9hl-"
. Short Approodl h9m ~ . sø..pt.Ñd $Ihorr Approoc:h
ttght~...othIlAA Simplm..:! 0--01 Foc:i~
.T,_............. "CAN nw..hokI C.OWftO Height
I....,. "' '- AI>-. Gr~ '...., 1~..1..... T-WO-.. 1- E&..anon
T_"""Z-~,ght. T,--.., ~.....
. Visuø D.Ken' PoInI . WoypoonI tRNAV)
Mi,. .... N08 .
NoPT.
OOAI..
IA. . . . , . . .
I'" 1Ieqund.
IAiI.
...
... KlS.
_v. '" ........ ........ It_GJ1oudoc1ow8Z-. 'VO.
'" . .. SAt.
...., SOf.
.. 'AC 'CH
101. .
IOn IOn. Th. .
VDO
-. RADIO CONTROL
AIRPORT LIGHTING SYSTEM
KEY MIKE
7~Wttt>",S..onds ~ ..... ....thi.. .s ..... 3 t_....thinS!IoKOMfr
'UNCTION
Hi"'" ............ ....1aW.
M8dn.m - 10-. ~
(l_..lfll 01' IEII-o"1
l- in'-ly -'... h- lEa - .11.-'11
A..-.... .- ...iII b8 ...do<-.I Of' ,..,,,- Approodl P,<<.duo. (lAP! C--. --- .... ~ Doto. os follo'W", ACIIVlt.n MIll 8..., 3ð-12:l8. ACtlVlt.tf MAl5ll1""Y 7-12'2.8 ACtlVlt.n YIt.!oI ....a .11 itWI' l-12:U. AC.Tt\lATf Hill It..., 1-2s...ln.8
"
Figure 17-6. General Information and _revlatlona
15 DECEMBER 1984 UPDATE oFM 1-240 167

Anldt 13
VOR RWY 6 ,. CAIRNS AAF (OIR)
fORT RUCKFR, ALABAMA
/
'" "
~
f ~~Ë REHOB
~ " - /
"" "jlokt -/-l ~OUND--
~\) /' DARED
# ~
--. -. --- ElEV 298
Al- 577,03 IUS ArfTIyJ
--- -- i,:,:-- THE EN ROUTE FACILITIES 'OIJ'F~ RING PROVIDES ALL THE
'~('" ~ FACILITIES/FIXES USED IN
FiiDr~. 11'i;;;j
,../ THE APPROACH '.~,;;"
'<:'..,,,, (APPEARING ON THE US
'0 'v
"'S, [,ABIDE GOVERNMENT EN ROUTE '" ~/ \ CHART).
'"\.."!) r::i" \.'1.~. \
\ \ IWiiliGRA~;, 1 I 1116 RR5 ::=::: I L Cho" 5:i i
2000 7
2."--,? (15.2) / I
1/, /Î THE FEEDER FACILITIES ,
I RING PROVIDES FOR
, FACILITIES/FIXES THAT
I ARE NOT PART OF THE ~/ENROUTE STRUCTURE.
/ ç.. aZR 2.5
,..r-'=' "v....
% "
CAIRNS APP CON 121'-34.(' 133.AS 237.S 3AS. -110' 125..( 23.1..( CAIRNS TOWER
126.2 2.(\,0 GND CON 121.9 248.2 CLNC OEL / 133.75 370.3 J.SR/PAR
I
ATiS 121.15
....-- /'"
/ - -
/ -- /" /
'
/
/ 374.3 Ball WEEVIL
/ 308 BVG
0
I I
OPPTO,
c~/\ ~" \
CRESTVIEW Iflel 1159 CEW ;-...:=. \
Clio" 106 \
~, THE INNER RING \/", ,., (NORMALLY 10 MILE "
RADIUS) PROVIDES THE BOUNDARY OF THE PROCDURE THAT IS
CHARTED TO SCALE.
Remain VCR
withinlONM ~ -'].'~\.~ I
MISSED APPROACH Climbing right turn 10
2000 out R.157 OZR VOR 10 REH06 't.lT CItId hold
01 111.02 8' "III
\J,
Figure 17-7. Coheentrle rings
168 15 DECEMBER 1984 UPDATE. FM 1-240

TYPE OF PROCEOURE~CHART REFERENCE M~RGIN IDENTIFICATION (TOP) AIRPORT NAME
..... .. NUMBER....... r "-- PAGE NUMBER CAIRNS ~lII) VOR WY 6 '''''-51'7,03 IUS ""myl fOAl RUCkER, AlABAMA APPROACH CONTROL. ~NS - CON
--- - -
,~ GROUND CONTROL. ~~.:,: ~~ :;:,' /' "'0","'>- AG~~g~~~~~NATING ATiS. ASR/PAR
~NS TDWBI // - - 1,. "- WHEN AVAILABLE 126.2 241.0
/" -- ~OfÄ "''''~l'
""'CON / "'",,- "- 121.9 2".2 /
\'1'1:'" "'81DE ClNC DE' / / ." ~. , '" 133.7. 370,'/ ^'i;
'..... / \ ...IP.. I "1><", ~ ~ 12\.1' 374.3 eOLl """EVIL \ \ / :!!I! aVG
I
PLAN VIEW
} CRESTVIEW (Fie)
n:'9 aw ::.:=' \ ~ Chgn 106
......'!P FEEDER FACiliTIES RIN~ ~'" RL
"HOB
~
WHEN REQUIRED
'<........ 2;11: "-.
/' ENR01E FACiliTIES >DA>EDJt/J HOON';-
~~ /
RING WHEN REQUIRED ---..: - -
Elf V 298
MISSED AmOACH C&nI:Iing riaht tun! to 2OCIO cIUI 1."7 OD
VOl to REHOI INf .... hold
ELEVATION OF HIGHEST POINT ON USABLE
0102 OL lANDING AREA
.. I AIRPORT SKETCH
....... wit8tinIONM
PROFilE VIEW- ~-ß" ~.......... Os,.
VOl
../ ~
CA1fQOIY ' . C D TDZE ... LANDING MINIMUM .... 7<<>/<<> M2 (500-") 7<<>/50 7<<>/HJ
.w2 (500-1) "42 t5DO-1") "';"@ .. SECTION CIIC""'G
7<<>-1 760-1 780-11'1 8HJ-2 442 [5(0.1) 462'SDD- 412 1500-1t1i) .., 2
...... 498/24 2DO 2DD~) 4 2DO tlJl GS 2..r ...
SPACE FOR NOTES AS REQUIRED FOR PROCEDURE - r-
HIItlItwrt ~2". '\8-3ð
AIRPORT C,?ORDINA TES
IDENTIFIER fORT AU(.KER, A.lAaAMA
-
., CAIRNS AN (OlIl)' VOR RWY 6 /
MARGIN IDENTIFICATION (BOTTOM) 31.16'N-I.5.4:!'W
..
Figure 17-8. Celms AAF (OZR)
15 DECEMBER 1984 UPDATE oFM 1-240 169

Atndt 11/ Amdl 13 18
IlS or NDB-l RWY 6 AL-5770' (US A,my)
CAIRNS APP CON -- - -
--- 121"-34,4" 133..&5 237.5"""--- .............
3.45"-120" 1'2.5." 2J.tA / CAIRNS fOWER 126.2 2..1.0
GND CON 121.9 '2.ca.2
ClNC DEl 133.7.5 370.;' A5A/PAA A-TIS
", 121.15 374.' I
/OI'PTO /
CAIRNS AAF (OZR) fORT RUCKER, ALAßAMA
/ / ------
"'"
./ '--- '" '-... ,
" /'.,0' i~ \
,
I
\ "
\ \.. \ A HOlOING PATTERN IS IN REHOB / LIEU OF A PROCEDURE ~~" '0
~ / t ~ TURN. NOTE THAT ~4 ~y PROCEDURE TURN BARB '<, ~~/ll HOUND
/
IS NOT PUBLISHED AND ~ ~ /" y INDICATES THAT ~'Q ---~~<1- - --- PROCEDURE TURN SHALL
~"s.--- ,S/" NOT BE MADE
-- Á DARED ------ Procedur. turn L~ MISSED Þ.PPIIOACH
noI allthorized ... 241. 1'9 Climbing rililht turn 10
. 2000 yio OlR VOl ..157
061.~ / Ie REHOR INT ond hold
2000 .IL5 climb to 7(10' betOl'.
""n. MHo
R-2103 /'
EIEY 298
en. minut. holding pottetn
G5 2.70. 'CH 56 .../
TIME/DISTANCE FROM FACiliTY/FIX AS SPECIFIED ON PROCEDURES
-5.INM-5 CATEGORY ' . C 0
S-IL56" ~98/2~ 200 (200-,,) ~98/40 200 (200-1101
$-lOC . 6ðO/40 30' (.01>-110) 6ðO/ SO
3ð2{~1)
S-NDI! . 740/40 44' (000-1101 740/SO 740/60
442 (500-1) 442 (.500-1\11)
QaCLING 740-1 760-1 780-11> 860-2 442 1500-1) .t62 (500-1) 42 (500-I}I,) 562 (600-2)
...... . ~98/2~ 200 (200-~) ~98/ ~O 200 (200-110) GS 2.7' a
~,....@tI'..~.
" 061" 5.6 NM
from tOM
FACiliTY FIX TO MISSED APPROACH DISTANCE
IlS or NDB-l RWY 6 31"\6'N-8S."3'W
,.
Hill 1:W'f' 6- . 18-36
NOS L to MAP 5.6 KIKJt5 6Q 90 120 150 180
Min.See 5,36 3,44, 2.1.. 1..52
FORT RUCKER. ALABAMA
CAIRNS AM (OZR)
Figure 17-9. Calms AAF (OZR)
170 15 DECEMBER 1984 UPDATE' FM 1-240

_13 VOR RWY 6
TOP MARGIN
" ,. CAIRNS AAF (OZR) FORT RUCKER. AlABAMA
CAIRNS APP CON 121.-:w.I. 133..s 237.5 :ws0-12O" 125..4 2:W."
CAIRNS TOWER / 126.2 2.nO GND CON 121.9 248.2 ClNe OEl
.
/ 133.75 370.3/ A!IR/PNt
Al. 577.03 (US Army! - ~
--- -- tìV;---
'OU't~ '.
-- <ì.'i'~ 'tto --
1"$ fli ì:
"IC"...~ ""-
'(III. " ABIDE-
to ^' '. " "
"' ,,/ ~., \ ~~.
\ \ I WIII:EGRAS~ 1
~, :=: I , ,
..---
/' / ./ /
/
/ 'O")lI WEEVil
...,0/.44
\ VOR RWY 6 31"16'N-8S"43'W
19
I HIRL '''''' 6-", 18-36
fORT RUCKEl.:, ALABAMA. CAIRNS AAF (OZR)
, BOTTOM MARGIN
Figure 17-10. Margin Identification
AtrIcb13
VOR RWY 6 ,. CAIRNS AM (OZR)
fORT RUCKER. A.tAßAMA
CAIRNS APP CON 121.-34A" 133.'" 237.$ US.-I20" 125." 23A.. CAIRNS IOWE' / 126.2 2.1.0
GND CON / '21.9 248.2 /"
/ CLNC DEL /' / '-2103 133.7.5 370.3
...,... / ATIS '
121.1S, 31..3 BOll WEEvil
/ 308 BYG
ASR AND PAR APPROACH -:- ~ PROCEDURE AVAILABLE/ to ~":' m., ~..". "',81--';::""
QPPTO 2000 ). \ O~ \ ('r,"~~' ,., -A<!., "
~. f>~/' 1\;
V \ 0 \ , I
0 "
AI. 57703 IUS .tu-my) - -
--- -- t~ "~ '.
-- {'It'- "fEOfÌ!"--- '~~l'
,t-~C'.I~ "" 10
'Illli .ð.AßIDE
"'i; "
/ ~., \
~f.:Þ'
\
INITIAL APPROACH DATA, CONTAINS MINIMUM ALTITUDE, COURSE AND DISTANCE TO VOR
..--- ./'
DIRECTION PROCEDURE
TURN TO BE MADE
I FINAL APPROACH COURSE
./
749/:0.
:zocD
,.,.~ (7/' MISSED APPROACH TRACK
.
/ /
"
"'" \/ ~ )
'\' /' ./"
Figure 17-11. Plan view
15 DECEMBER 1984 UPDATE .FM 1-240 171

One minlJle
ItoIdinv p~1IITI
FINAL APPROACH FIX
(FAF) SYMBOL ALTITUDE OF GliDESLOPE AT LOM
MINIMUM ALTITUDE FOR
GliDESLOPE INTERCEPTION AND MINIMUM ALTITUDE FOR NON-PRECISION UNTIL PASSING LOM
Procedure turn
not alJlhorized ..... 2410
MISSED APPRO,6,.(H
Climbinv righf turn to
2000 via OZR VOA R.1S7
to REHOII INT and hold .ILS climb to 700' b.fOfe
turn.
MISSED APPROACH POINT (MAP) FOR ILS
PROCEDURE IS AT DH GS 2.70' "'Tëii56
_-'.1_- MISSED APPROACH TRACK
DEGREES AND HUNDREDTHS,
THRESHOLD CROSSING HEIGHT IN FEET
MISSED APPROACH POINT (MAP) LOCALIZER ONLY SHOWN BELOW AIRPORT SKETCH (SEE FIGURE
)7-18)
Figure 17-12. Profile view (precision) FINAL APPROACH FIX
SYMBOL (FAF)
MAXIMUM DISTANCE OF
PROCEDURE TURN FROM FACILITY, FIX OR WHATEVER THE PROCEDURE TURN IS
BASED ON,
, .
bmain VORTAC MISSED APPROACH
with.n ION, M
-í (I,mblol600d,re,"
~5~ TL lOM ond hold
~ fl" 2000 ð ~
5 DME
--173 20001l~"D" -
I
l 7201 """""..",
PROCEDURE TURN MINIMUM ALTITUDE
STEP DOWN FIX (RADIAL IDENTIFIED ON PLAN
VIEW)
MISSED APPROACH POINT
I.TN'" MISSED APPROACH TRACK
MDA FOR APPROACH, LOWER MINIMUMS ARE AUTHORIZED IF
STEPDOWN FIX IS
IDENTIFIED BY DME, OR BY OFF COURSE RADIAL (SEE FIGURE 17-15)
MINIMUM ALTITUDE OVER FAF (VORTAC) BEFORE DESENDING TO MINIMUM DESCENT ALTITUDE (MDA)
Figure 17-13. Profile view (non precision)
LOWEST RADAR MINIMA AVAILABLE FOR THIS RUNWAY, (MILITARY lAPs
ONLY.) SEE FRONT OF BOOKS FOR ADDITIONAL RADAR MINIMUMS,
VISIBILITY (RVR IN 100'8 OF FEET)
PRECISION STRAIGHT-IN TO RUNWAY 2
NON-PRECiSION '"
STRAIGHT-IN LOCALIZER ~ ~::~.Y
(NO GLIDE SLOPE) S-IOC 2
MINIMUMS.
HEIGHT OF DH ABOVE TOUCHDOWN ZONE (HAT)
207-17
CIRCLING 480--1 S6D--2 551 600-2
MILITARY PLANNING MINIMUMS S.ASR 2 40-\10
MDA
HEIGHT OF MDA ABOVE TOUCHDOWN ZONE (HAA)
HEIGHT OF MDA ABOVE AIRPORT (HAT)
172
Figure 17-14. Minimums section (precision)
15 DECEMBER 1984 UPDATE. FM 1-240

CIRCLING MDA WITHOUT STEPDOWN
STRAIGHT-IN RUNWAY 13 MINIMUMS
MINIMUM DESCENT ALTITUDE
HEIGHT OF MDA ABOVE TOUCHDOWN ZONE (HAT)
VISIBILITY IN STATUTE MILES
CAlf . C
760.11. 625 (700-1Ya)
760-1'!ó 618 (7QO.IIâ)
D
760-2 625 (
BASIC VOR MINIMUMS ClRCUNG 760.1618(700-1)
.2 618 (700-2)
HEIGHT OF MDA ABOVE AIRPORT (HAA) .13 760-16251700-')
DME MINIMA
MILITARY PLANNING MINIMUMS
MINIMUMS AUTHORIZE~ S.13
WITH SPECIFIED OPERATING AIRBORN CIRCLING
EQUIPMENT
500-136SI-')
6OO.1..81S(]Q.l)
ALTERNATE MINIMUMS NOT STANDARD. CIVIL PILOTS ONLY. ARMY
NOTES CONCERNING THIS PROCEDURE AND MINIMUMS APPEAR IN THIS SPACE
Figure 17-15. Minimums section (nonprecislon)
CIKUNG
A . C
1500- 1 009 1100. I) 1.500- 1 ~
009 (1(>> I \1,)
, C AUlMfTU SfnlNCi MINIM.
CATfGCaY D
lSOG- 2
009 1700-')
1600- 2 1600.2'. 7CW (100.21 709 ,100- 2 '. I
;" AnderMJfl D19.",,"., 18ft.,." .he" not D"Dllobl.. U'8 Gt-.., olh"'''.' Mtt'''1
ANA
CIICUNG 160(). 1 109 1100 1)
TAKEOFF MINIMUMS NOT STANDARD OR DEPARTURE PROCEDURE PUBLISHED
FIgure 17-16. Weather minimums shown In minimum box
15 DECEMBER 1984 UPDATE. FM 1-240 173

VOR'AC MISSED APPROACH
Climb to 1200 then climbing righi turn to 2000 direct AMG VQRTAC and hold.
R.mgin 14d within 10 NM
"- AMG .,..,,1800 'DM' '!,'l.1:i
"F rom AMG 7 DME "re, 800. 1080 when ulin;
ValdOlla altim81er 18~in
.. "
"''''''',
CA TEGOIrY A .
s-.. 600-1 403("0..-1)
CIRCLING 660-1 09 (500, I)
c D
6()()'11A1 403(400.114)
660-1 Y, 760-2 4.59 (5()().1 Yl) .559 (600-2)
When Jacal allimeter lening not available'. U~e Va,lda~la altimele, ","lng 2.
Ine,.o.. all MOAs 280 feet. 3. Strai;ht.. in minimums from 7 DME Are no1
authorized. ACTIVATE MIRl and VASt Rwy~ 15-33.122.7. ðNA
SOD Feet-MDA with local altimeter 2BO Feet-Increase when using remote altimeter
BBO Feet-New MDA -201 Feet-Less Airport Elevation
679 Feet-Rounded Up (700-1)
mv 201
MlRL 15.'3
Knah 60 90 120 150 180 MindH{;
Figure 17-17. Weather minimums not shown In minimum box
~TDlICLllwy5 HIRl Rwys 5.23 and
FAfto MA,P 4,3 NM Knoll 60 90 120 150 0
TIME AND SPEED TABLE /M;"S" .,1. "" 2,09 I,.' "
FROM FAF TO MAP /" FAF TO RUNWAY THRESHOLD OR MAP SHOWN AS 4,3, NM,
AIRPORT ELEVATION
BEARING AND DISTANCE
TOUCHDOWN ZONE ELEVATION (TDZE)
NOTE ON HIGH INTENSITY RUNWAY LIGHTING -
iiJ
610A
;r; " :!J .
7.3
Figure 17-18. Airport sketch
174 15 DECEMBER 1984 UPDATE. FM 1-240
USABLE LENGTH OF RUNWAYS
APPROACH LIGHTS SYMBOL
VISUAL APPROACH SLOPE INDICATOR (VASI)
DISPLACED THRESHOLD
HELIPORT
ARRESTING GEAR
FINAL APPROACH FIX TO MAP (NOTE: MAY BE SHOWN AS LOC. SUCH AS FAF TO MAP,)

VIFR TAKE-OFF MINIMUMS AND
DEPARTURE PROCEDURES
CiYiI Airport'll and Selecled Military Airports
CIVil USERS: FAR 91 pr-=ribM tCJke-off r. and tlstablisheJ lalte-off minimums as foIlo~: (1) Aircraft
having two engine~ or les, - one statute mile. (2) Aircraft havmg mof8 tnon two envil'lft - OM half
stoMe mile.
MIlITARY USERS: Sp.cial IFR ~e procedures. not publtstted OS Stondard Im1rument o.pc.1vre (SlCbI.
and (ivil '.&-oK minima ore induded below and en edobli,hed to cas~t pilon in obstruction cmJickmc8.
R* to appropriate service dirediv.. to.- toll.-oft rinirrturm.
Airports witt! IFR "'~H minÎmUm5 O1her than 'Iondard or. lid'8d beaow olphabeticaUy by airport narN.
0epcIrtur1l Pfocedure5 and/or ceiling YÎ:ubility minimum" ani 8Itabli.hed to GUil' pilots conducting IfR flivht in
Ø'lotding obstructions during climb to the minimum erroute ohitude. Toite-off minifnuml cmd dep~8S app'" to 011 runwØY' u"1eu ~.. specified. .aJtitudes.. unles. otherwise mdicoted, ore minim...... .uftitu- in feet MSl.
AIRPORT "AME TAKE-OFF MINIMUMS AIRPORT NAME TAKE-OFF MINIMUMS
ALBA"Y~GHERTY COUNTY. GA . . . . . . Rwy .- . fAR 135.
Awys " ~ dimb rwy hdg 10 700 belore turning.
ATLANTA,GA DEKALB- PEACHTREE. . . . Rwy 9, 27, 34.. 200-1
Rwys 2OI.-2OR. 500-1
Figure 17-19. IFR take-oft minimums
XIII
INSTRUMENT TAKEOFF PROCEDURE CHARTS
RATE OF CLIMB TABLE
(It. per min.)
A rate of climb table is provided for U~ in planning and eJO.eCuting
takeoH procedures under known or approximate ground speed conditions.
REQUIRED CUMB GROUND SPEED (KNOTS) RATE
(It. po< NMI 30 60 80 90 100 120 140
200 100 200 267 300 333 400 ..,7
2~ 125 250 333 375 .,1 500 583
300 1~ 300 400 .SO 500 600 100
3~ 17S 3~ ..,7 S25 583 700 816
400 200 400 533 600 667 800 933
.~ 225 .~ 600 615 TSO 900 10SO
SOl) 2~ SOl) 667 TSO 833 1000 1167
5~ 275 5~ 733 825 917 1100 1283
600 300 600 800 900 1000 1200 1400
650 325 6SO 867 915 1083 1:100 1516
700 3~ 700 933 10SO 1167 1400 1633
REQUIRED
aIMS GROUND SPEED (KNOTS) RArt
(It. po< NM) 1~ 180 210 240 270 300
200 SOl) 600 100 800 900 1000
2~ 625 TSO 875 1000 1125 1250
300 750 900 1050 1200 13~ 1500
- 3~ 87~- _n'~5I1.
1225 1400 1575 17~ ..
-
Figure 17-20. Rate of climb table
15 DECEMBER 1984 UPDATE -FM 1-240 17!

I
~ /
~ f /
y" "'" ~~Ê "H08 ~, ./
/
'" '- '~y /j~"t- --- .' /
" j'" /-lHoUND ,/ OA.AED
".....-/ ---.....:- -- ELE v 298
Chapter 18 VHF Omnidirectional Range (VOR) and Nondireclional Beacon (NDB) Approaches
1 B-1. General The separate VOR and NDB approach charts published by Federal agencies and private companies contain complete
Amdt 13
VOR RWY 6 CAIRNS ÅPP CON 1218-3.w" 133."5 231.5 3450-1200 125." 234." CAIRNS TOWER /' 126.2 2'1.0 GND CON 121.9 2<48.2
ClNCDEL./ / 133.75 370.3/ ""/.AA / ATiS f
121.15 374.3 BOlt WEEVil
I ~:~. ßVG
I
/
I
I OPPTO.
c~/~ ~.. ~
CRESTVIEW Ifle) 115.9 CEW ::.:=" \
Cfou:ln 106
Rltmai" within 10 NM
'/.'1'.
1700 ..............
-........... OS/.
CATEGORY
~
information on current instrument approach procedures at specific airfields, The format of all these charis is basically the same. Therefore, once the aviator has studied one type chart and its legend, he should be able to use other types effectively.
Section I
Typical VOR Approach
18-2. VOR approach chart The Cairns Army Airfield VOR runway 6
approach chart (fig 18-1) is typical of those found in current navigational publications. Its tormat and general data presentation are used as a guide. (For
19 CAIRNS AM (OZR) FORT RUCKER, ÀLABAMA
----
AL.577.03 (US Army) -
--- /"
'N::--- 'OUI,::.....
'. --
('1'/;'--
fEfDtìi'-. ':.-t'";--
''"'('/0 "" '0 I'I(J' .ð.ASIDE
"'.. "',,/' ~q\ \ ~".
\
--- -- /' ./
7491.\
VOf!
MISSED APPROACH Climbing riaht turn to 2000 OV'I R.157 OZR
VOR tø REHOfI INT and ~d
~ ./ ",,"
.. 8 C 0
740/40 -"2 (SOO-JJ.) 740/50 74O/6lJ 442 (500-1) 442 (500-1\1.)
740-1 760-1 780-1)', 860-2 ""2(~1) 462 (500-1) 482 (.500-1VJ) .., (ooo-,) ~98/24 "'" t200-I;} 49 "'" 200-"- OS 2.7-
CRCLING
S.,.u 6
...
VOR RWY 6
176
",e@ 36
HIIU Rwys 6-'04, 18-36
31.16'N-8S.043'W
19
FORT RUCKER, AlABAMA CAIRNS AM (OZR)
Figur. 18-1. Typical VOR approach chart
15 DECEMBER 1984 UPDATE. FM 1-240

detailed explanation of approach chart
symbols, consult the flight information
publication instrument approach
procedure charts and their legends that
are printed with each volume.)
18-3. VOR station location
VOR stations used in VOR approaches
may be located some distance from the
airport as shown in figure 18-9 (called
OFF airport VOR) or may be located on
or near the airport as shown in figure
18-1 (called ON airport VOR). Figure
1 B-1 is used to illustrate a typical VOR
approach procedure.
18-4. Initial contact and arrival
Flying eastbound on V-241 , at 5,000 feet
with Cairns AAF as the destination (fig
1 B-2), and in compliance with ATC
instructions, radio contact is first
established with Cairns approach control
over DARED intersection. Cairns
approach control then clears the aviator
to the Cairns VOR from over the HOUND
intersection with clearance to hold
southwest of Cairns VOR on the 231- degree radial left turns. Clearance is then given to descend and maintain 4.000 feet and an expected further approach
clearance time of 1525 is given. Upon arrival at Cairns VOR at 4,000 feet-
a. Note the time.
b. Turn outbound to enter the holding
pattern .
c. Reduce airspeed to prescribed
holding speed if not done previously.
NOTE: To comply with maximum holding
airspeed, reduction of airspeed should
be done when 3 minutes or less from the
holding fix.
d. Report to ATC if required.
NOTE: The above actions are performed almost simultaneously. The report is not
made until after station passage.
18-5. Holding
a. Initial passage of the Cairns VOR occurs when the TO-FROM indicator
reverses readings (TO to FROM). The aviator would then turn outbound to a
heading of 231 degrees (fig 18-3) to
enter the holding pattern. Use of the
course selector and deviation needle to
track outbound during the entry
procedure is optional, but this procedure will aid the aviator in orienting himself
with respect to the VOR station and to
the holding radial. Either the course selector on the holding radial outbound is set or a heading outbound is flown with the course selector set for tracking
inbound on the holding radial.
.GUM . 'f': ~_.._...
Figure 18-2. Typlca' en route chart
15 DECEMBER 1984 UPDATE. FM 1-240 17/

b. After flying 1 minute on the outbound heading of the entry leg, a left turn is made to intercept the holding course inbound (051 degrees, fig 18-3). Prior to turning, the course selector is set on 051 degrees and the TO-FROM indicator reads TO. The inbound turn is adjusted, if necessary, as the course indicator and I or the radio magnetic indicator is monitored to intercept the desired inbound course.
c. During the initial inbound leg of the holding course, the drift correction necessary to remain on the desired track and the time flown on the inbound ieg are determined. The aviator probably will not be able to establish proper drift correction on his first time inbound, but shouid be able to do so on subsequent legs. Subsequent outbound legs of the holding pattern are adjusted so that each inbound leg requires 1 minute.
~ ~
/~
,-... ",//// ~
",/ /! ( @{+ ,
I I I I I
6 HOUND
Figure 1 B-3, Holding pattern entry
178 15 DECEMBER 1984 UPDATE. FM 1-240
CAIRNS
--- 111.20ZR - - . .
.-.

d. After flying over the VOR facility, a
18O-degree turn is made to the outbound heading of the holding course. Timing for
the outbound leg should begin when the
aircraft is abeam the station (fig 18-4). (1) Point A. During the left turn
outbound, the course selector is rotated gO degrees to the left (reading of 321
degrees), thereby enabling the aviator to
fix his position abeam the station. During
the turn, the deviation needle deflects full left.
(2) Point B. The needie centers abeam the station. Outbound timing
begins at this time. (3) Point C. After passing point S, the
CDurse selector is reset to 051 degrees to intercept the hoiding course inbound.
The needle deflects to the side away from the holding course during the
outbound portion of the holding pattern. (4) Point D. The needle centers as the
aircraft turns inbound and intercepts the holding CDurse.
e. When holding at a fix where methods described in d above cannot be
used, the aviator begins timing the
outbound leg immediately after rolling out
of the 18Q-degree standard rate turn.
f. There are aclually three methods of determining the abeam position.
(1) The VOR number 2 needle when it
passes the gO-degree point in relation to
the inbound course (fig 18-4, E).
(2) The to/from flag on the 10 1347
changes from "from" to the "to" position
(fig 18-4, C). (3) The less desirable method of
rotating the course selector 90 degrees to the inbound course (fig 18-4, S).
These techniques permit the aviator to
time the outbound leg accurately from a
position abeam the station.
18-6. Descent
a. The aviator is holding at 4,000 feet
over the Cairns VOR. The approach
chart (fig 18-1) shows the minimum
procedure turn altitude for the VOR approach to the field as 1,700 feet. As
lower air traffic departs the holding
pattern, the controller now clears you to descend to a iower holding altitude. In
this situation, the clearance to 3,000 feet is received. Continue the established holding pattern and establish a 500-foot- per-minute rate of descent. When you
report leaving 4,000 feet, the controller
can assign this holding altitude to
another aircraft. A 500-foot-per-minute rate of descent should not be exceeded when within 1,000 feet of desired altitude.
b. if the aviator had been at a higher
altitude (9,000 feet for example), and had been cleared to a lower altitude
(3,000 feet for example), he could have established the maximum rate of descent at which he could still fully control the
aircraft. He could have used this rate to within 1,000 feet above the newly assigned holding altitude then reduce to a rate not to exceed 500 feet per minute
for the 1,000 feet of descent.
18-7. The approach a. The aviator has been advised of his
expected further approach clearance
time. As air traffic conditions change, the controller revises the expected further
_.~
Figure 18-4. Flying a holding pattern
15 DECEMBER 1984 UPDATE. FM 1-240
'~~11;.~1~~ ==c-.I
179

approach clearance time and advises the aviator accordingly. When cleared for the approach, the aviator may immediately begin the descent from the 3,000-foot hoiding altitude to the 1, 700-foot procedure turn altitude, regardless of his position in the holding pattern. The final
turn inbound from the holding pattern serves as the procedure turn, so he could extend the outbound leg to lose altitude if necessary, provided he does not exceed the 1 0 nautical mi les (fig 1 B-1) prior to turning inbound. Since this approach is an ON airport VOR approach, the final segment on the approach begins with completion of the procedure turn.
CAUTION: No extension would be allowed for those procedures using a
holding pattern in lieu of a procedure turn.
b. Descent from the procedure turn altitude may be initiated when the aviator has intercepted the final approach course inbound. So that visual reference with the runway environment can be established as early as possible before reaching the missed approach point, the descent to the MDA should be made without delay. An effort should be made to arrive at the MDA with enough time or distance remaining to identify the runway environment and descent from the MDA to touch down at or near the normal approach angle and descent rate for the aircraft. If the approach clearance did not state that circling to another runway would be required, the aviator will use the MDA for a straight-in approach to runway 6 (S-6) according to the category of his airci dft. If circling to another runway is required, the MDA is used for circling according to the category of the aircraft.
c. Descent below the M DA is not authorized until the aviator establishes visual contact with the runway environment and can reasonably expect to maintain visual contact throughout the landing. In making an ON airport VOR approach, the VOR is the missed approach point. Should visual contact not be made by the time the VOR is
reached, a missed approach is executed (paragraph 18-9).
NOTE: Where the ,VOR station is located away from the airport, descent is
restricted to minimum altitude prior to reaching the final approach fix. After passing the final approach fix inbound, descent to minimum descent altitude is
authorized. The missed approach point is determined by computing the flight time from the final approach fix to the landing
runway. The missed approach must be executed at the expiration of this time even if the aircraft has not reached the appropriate MDA.
180
18-8. Landing Landing clearance will be issued by ATC during the approach. if visual reference is lost while circling to land from an instrument approach, the missed approach procedure will be executed. To become established on the prescribed missed approach course, make an initial climbing turn toward the landing runway and continue the turn untii established on the missed approach course.
18-9. Missed approach If for any reason the landing is not accomplished, execute the missed approach procedure. To accomplish the procedure as specified in figure 1 B-1, perform the following:
a. Adjust power and attitude, as necessary, to begin an immediate climb.
b. Turn right to intercept the 157- degree radial Of Cairns VOR.
c. Set the course selector to 157 degrees. This results in a FROM indication and a right needle deflection on the course indicator.
d. Report a missed approach and include the reason (unless initiated by ATC) to the controller and request further clearance, either for another approach or to the alternate airport as appropriate. (If
you request clearance to the alternate, flight plan data must be given to the controller.)
e. Check for centered needle at the 157 -degree radial.
f. Continue to climb to the missed approach altitude (2,000 feet).
g. Comply with subsequent ATC instructions.
Section II Typical NDB approach
18-10. NDB approach chart NDB approach charts (fig 18-5) are similar in appearance and format to VOR approach charts discussed in the previous section. The approach procedures are essentially the same as those for VOR. In the event of an RMI malfunction, fixed card ADF procedures must be used.
15 DECEMBER 1984 UPDATE. FM 1-240

Amdo .. NDB RWY 5 10
At.50 'IFAAI BIRMINGHAM MUNI iBHM)
B!RMINGt1Þ.M. AL".AMA
IIItMINGHAM A." CON 12"" 385.6 IfIoWNGHAM TOWEl 119.9257.. GND CON 121.734.6 ClNC DEl
120.' .... A115119-.29'.7
'1'--Vu'~CAN II" VU,l~:..
Chon91
"7' -
r"'-, .~~-=- J. ,29".~-;:'-
11A~
I~:~~ - ~ _.a. 0- .... tooJ
"
(W) \
Md>I!N '
...
,,' ,,':I" \
.... 1"'.' Ã1397
810/ 393
'II~M, /JI.
MM. A 14o.t
o. "'910
~. à 82O:t: A 1228:t
10lIO
A:zo.&' "
\' , ,,'\.~ ?
,. 1;.)1> ~'
AI549
/~ i ~~7 ~
\" )
,~
,
,. (f~ ,0 . .1
" ,," ~~
...DIN
....... :l1NT/LOM
-.. '0- '1Y'
2500~ -- -O.s..o-- '""'- 2200
ELfV I.... Rw' IIId. 438" Rwy 23 'do 8220'
MISSED A.-..oAOI CMrtb 10 3ODO direct 10 LOM Oftd hold.
828"
./ BU. "1$1 ,
~ r.. ~
" .
...
CAnGOIn'
5-5
A .1 ,
1300-1 V. 694 (1OO-1~)
1300.2 656(700.1)
0
13(1()..2
". (7OC).21
1:JOO.21/O
656(701).2)111
u
NDB RWY 5 33':U'N-I6'd'W
II
!j, 610b, . "...
'æ.' ,', .
703"
~_""NM MI:08r'1 !nt/LOM TDZtCL ... S
Mill hyI J.23 and 11-36
'A' 10 MA' ".5 NM Knot. 60 90 I 20 150
Mia,. 4130 3:00 2:15 ..... 1:30
IIRMING~, ALAIAMA 8IRMINGIIAM MUNI (BHM)
CIIQING
1300/.0 ... (""''''
1300.1 "'1""''' Cirdine I'IOt outtloriud Sf. of rvnwG)' '.23. V
,.
Figure 18-5. NDB approach chart
15 DECEMBER 1984 UPDATE. FM 1-240 181

18-11, Arrival Figure 1 B-6 depicts aircraft and the associated instrument indications as the aviator approaches the McDen NDB on an inbound course of 304 degrees at 5,000 feet. He is going to execute an NDB approach to runway 5 at Birmingham Municipal Airport (fig 18-5). He has been cieared to hoid southwest of the McDen outer marker (OM) on a
054-degree course to the outer marker, left turns. He has also been cleared to descend and maintain 4,000 feet and to expect further clearance at 1730. Upon arrival at McDen outar locator at 4,000
feet- a. Note the time. b. Begin the turn outbound.
c. Reduce airspeed to the prescribed holding speed if not done previously.
NOTE: Airspeed reduction is initiated
when 3 minutes or less from the holding
fix. However, the holding fix is crossed initially at or below maximum holding airspeed.
d. Report to ATC if required.
NOTE: The above actions are performed almost simultaneously. The report is not made until after station passage.
18-12. Entry to holding Figure 18-7 shows the NDB holding
pattern entry procedure and instrument readings during entry to the pattern. The aviator arrives at McDen and accomplishes the normal entry into the left-hand holding pattern by turning parallel to the outboard heading on the holding side.
a. Point A. After passing McDen inbound, the aviator observes station
passage. The number 1 needle (bearing pointer) will begin to oscillate and then deflect into the lower haif of the RMI
compass card. Then the aviator begins a
standard rate turn to the left. At point A, the aircraft is on a heading of 234 degrees. The bearing pointer indicates that the station is to the left rear of the aircraft. The tail of the bearing pointer indicates the bearing from the station on which the aircraft is located (299 degrees) and the head of the bearing pointer indicates the magnetic direction to the station (119 degrees).
b. Point B. The aircraft has flown outbound for approximately 1 minute and has begun a turn to intercept the inbound course of 054 degrees. During the turn, the aviator monitors the heading indicator and movement of the bearing pointer and adjusts the rate of turn in
order to roll out on the 054-degree course to the beacon.
c. Point C. The aircraft is inbound to the station on a heading of 054 degrees as shown. The bearing pointer indicates that the magnetic direction to the station is also 054 degrees. Therefore, the
182
aircraft is tracking "on-course" to the station. Throughout the inbound leg, determine the drift correction (if any) to maintain the desired track and the flight time from rollout to station passage in
order to adjust subsequent legs.
/" '" '" '" '" ../"
s:?\ci~M'DEN I \;j 224 BH-:-:::
0 '-,r. ~~ ,,~o~ ~9O ~ ~~, 099~ "'-
/'J.'; .
,.." ~
. ~ 'ü ~ -
. w
CHELS
,
,. /
I, BW \ /
'... -
~;:?'" 0 /
'J.">~ ~
Figure 1B-6. NDB arrival
,
e- A ......
McOEN
-
-
- - o"""''l~ 224 SH -:-::: I
-
-
(;;>.. O"~ "
,
,
/~, "
. C \
,
"
Ò. CHELS
c
Figure 18-7. NDB holding pattern entry
15 DECEMBER 1984 UPDATE. FM 1-240

18-13. Holding Figure 18-8 shows the holding pattern with aircraft locations shown at various points in the pattern.
a. Point A. After passing the beacon inbound, the aviator begins the left turn to the outbound heading.
b. Point B. As the aviator completes the turn to the outbound heading, he adjusts for drift correction and monitors the ADF indicator to determine when he is abeam the station. When the indicator reaches the 90-degree pos~ion (144 degrees in this case). the aircraft is
abeam the station and the timing for the outbound leg begins.
c. Point C. Having flown the required outbound time (based on the desired inbound time of 1 minute). a left turn is
begun to reintercept the 054-degree inbound course.
d. Point D. The aviator establishes the aircraft on the inbound course of 054
degrees and rechecks his timing and drift
correction for further refinements.
ø ~
. B
'~'~~ 'I.'!>t: CDA
/' /\' ,ø/ .0/
c
D
Figure t8-8. NDS holding pattern procedure
A
15 DECEMBER 1984 UPDATE. FM 1-240
S-<'
18:

18-14. Descent Figure 18-9 shows the NDB descent
procedure from the holding pattern and should be used in conjunction with figure
18-5. a. At point A, the aviator has received
approach clearance and has begun his
descent to procedure turn altitude (2,500 feet) while in the holding pattern. Because he is established in the holding
pattern, the published turn is not required
as the turn inbound serves as the
procedure turn.
NOTE: After receiving approach clearance, the aviator may disregard the time restrictions for the outbound and inbound legs. However, he must remain within his airspace limitations as depicted
on the approach chart-t 0 nautical miles in this case. No extension would be allowed for those procedures using a
holding pattern in lieu of procedure turn. b. In the event the aviator has been
issued approach clearance while inbound to McDen LOM, he would have turned and intercepted the outbound course of 234 degrees after arrival at McDen and also would have executed the procedure
turn.
18-15. Intermediate and final approach
a. Figure 18-10 shows the procedure and instrument readings during the
intermediate and final segment of the approach. After completing the turn inbound, the aviator intercepts the 054- degree inbound course and descends to 2,200 feet. This is the minimum authorized altitude prior to reaching the final approach fix (McDen).
b. When observing station passage, the aviator notes the time, begins the
descent to the minimum descent altitude,
and if required, reports the beacon inbound. The descent to the MDA (1,300
feet for a straight-in approach or a
circling approach) to another runway (fig 18-5) should be made without delay. The recommended rate of descent is 500 feet per minute. A greater rate of
descent may sometimes be necessary due to high ground speeds or short final approach segments, so that visual
reference with the runway environment can be established as early as possible
before reaching the missed approach pOint. However, descent below the appropriate MDA is not authorized until
the aviator establishes visual contact with the runway environment and can reasonably expect to maintain visual contact throughout the landing.
c. In this approach, the facility (McDen) is located OFF airport (para
18-3) and the aviator would continue to fly toward the airfield at the MDA for the
time computed based on the distance to the missed approach point and the estimated ground speed (fig 18-10). For this approach, the distance from the final
184
Me DEN INT/LOM
IAI Profile View
Æ!!L
~o
........_--'*'
f--4.5 NM-j
(8) Plen View
" -' -' -'
A 0\ - "r/ '2-'>}/ t:õV
0/ M~DEN INT/LOM
o'>~
(Cllndrument Readings
~
Figure 18-9. NDB descent
REMAIN WITHIN 10 NM Me DEN INT/LOM
~~?Jf 2500 --- -~-oS4O A
2200 CD'", . J .
~ ~~ "
Figure 18-10. NDS Intermediate and final approach
15 DECEMBER 1984 UPDATE. FM 1-240

approach fix (McDen) to the missed approach point is 4.5 nautical miles, If
the aviator has computed his ground
speed to be gO knots, the flight time tor this segment of the approach is 3
minutes. If the MDA is reached prior to the expiration of the 3.minute time period, he maintains this altitude and continues on course, A missed approach will be executed 3 minutes after leaving
the final approach fix if visual contact with the runway environment has not been established,
NOTE: For NDB approaches in this
example, the MAP is determined by computing the flight time from the FAF and must be executed at the expiration of this time even if the aircraft has not reached the appropriate MDA.
Chapter 19 Instrument Landing System
19-1. General The instrument landing system is a
complex array of radio and visual navigational aids, It is the most efficient system in widespread use for safe landing under the lowest ceiling and visibility conditions permitted by obstruction clearance criteria, Its
effectiveness as an approach aid is
matched by radar, but the preferred system at most major air terminals is the ILS supplemented by radar.
Section I
Components
19-2. Ground components a, Basic components, An I LS consists
of the following components: (1) A localizer radio course (LOC) to
furnish horizontal guidance to the airport runway,
(2) A glide slope radio course to furnish vertical guidance along the
correct descent angle to the proper "touchdown" point on the runway,
(3) Two VHF marker beacons, outer marker (OM) and middle marker (MM),
are normally installed on the front
course, They provide accurate radio fixes aiong the approach path to the runway, At some locations, a third marker beacon may be employed on the front course to indicate the point at which the decision height should occur on a Category II I LS. A marker beacon may be installed on the back course to indicate the back course final approach fix, Compass locator or radar may be substituted for the OM or MM, DME, when specified in the
procedure, may also be substituted for the OM,
(4) Approach lights are normally installed on the ILS runway to provide
means for transition from instrument to visual flight.
..
, b, Supplementary components, The ILS is frequently supplemented by installing one or more of the following
approach aids: (1) Compass locators, The locators
provide transition from enroute NAVAIDs to the ILS system; to assist in holding
procedures, tracking the localizer course, or Identifying the marker beacon sites;
and to provide a final approach fix for NDB approaches,
(2) Transmissometers, This device "looks" instrumentally down the instrument runway in the landing direction and either determines the
runway visibility by reference to ordinary runway lights or computes the RVR by reference to high intensity runway lights.
(3) Surveillance and precision radar systems, (See chap 20,)
(4) DME. This aid, aithough normally installed at VHF, VOR, TACAN, and VOR and TACAN navigational facilities-collocated (VORTAC) sites, is occasionally collocated with the instrument landing system. With proper airborne receiving equipment, the distance can be read to or from the transmitter at all times.
(5)Visuai approach slope indicator. (See para 19-11.)
(6) Instrument approach ligh!/ng systems. Instrument approach lighting
systems provide the basic means for transition from instrument flight using electronic approach aids to visual flight
and landing, Operational requirements dictate the sophistication and configuration of the approach light system for a particular airport. Refer to the legend of any volume of FLIP instrument approach procedures for a
display of various approach lighting
systems. Lighting systems information is
also found in the flight information handbook.
(7) Runway marking. For a discussion of instrument runway marking, see the Airman's Information Manual.
(a) Condenser.discharge sequenced flashing light system. This instrument approach lighting system is installed in
conjunction with the instrument approach light system at some airports which have US Standard "A" approach lights as a
further aid In making instrument approaches, The system consists of a
series of brilliant blue.white bursts of light flashing in sequence along the approach lights. 11 gives the effect of a
ball of light traveling toward the runway. (b) Runway edge lights. These lights
are used to outline the edge of the runway during periods of derkness and restricted visibility conditions. They are classified according to the intensity of brightness which they are capable of producing. This light system consists of HIRL, medium intensity runway lights
(MIRL), and the low intensity runway lights (LlRL), The HIRL and MIRL systems have variable intensity controls,
15 DECEMBER 1984 UPDATE oFM 1-240
whereas the LlRL system normally has one intensity setting,
(e) In-runway lighting aids. Touchdown zone lighting and runway centerline lighting are installed on some precision approach runways to facilitate landing under adverse visibility conditions. Taxiway turnoff lights may be added to expedite movement of aircraft from the
runway, 1. Touchdown zone lighting-two rows
of transverse light bars disposed
symmetrically about the runway centeriine in the runway touchdown zone. The system generally extends from 75 feet to 125 feet of the landing threshold to 3,000 feet down the runway.
2, Runway centerline lighting-flush centerline lights spaced at SO-foot intervals beginning 75 feet from the landing threshold and extending to within 75 feet of the opposite end of the runway,
3. Runway remaining lights-centerline lighting systems in the final 3,000 feet as viewed from the takeoff or approach position. Alternate red and white lights
are seen from the 3,000-foot points to the 1,OOO-foot points, All red lights are seen for the last 1 ,000 feet of the
runway. From the opposite direction, these lights are seen as white lights,
4. Taxiway turnoff lights-flush lights spaced at SO-foot intervals, defining the
curved path of aircraft travel from the runway centerline to a point on the taxiway,
5, Runway end identifier lights (REIL)-installed at many airfields to provide rapid and positive identification of the approach end of a particular runway, The system consists of a pair of synchronized flashing lights, one of which is located laterally on each side of the runway threshold facing the approach area. NOTE: Consul! the FLIP IFR Supplement to determine the exact supplementary components of the ILS that are available for a specific airport.
Section II
Operation
19-3. Localizer a, Signal pattern (fig 19-1), The
localizer transmitter is located near the departure end of the primary instrument runway. I! produces two signal patterns which overlap along the runway centerline and extend in both directions from the transmitter. One side of the signal pattern is referred to as the blue sector, the other as the yellow sector. The "beam" produced by the overlap of the sectors is usually from 4 degrees to 5 degrees wide, The portion of the beam extending from the transmitter toward the outer marker is called the front
course, The sectors are arranged so that when flying inbound toward the runway on the front course, the blue sector is to
1BE

BLUE SIDE
~NWAY \ FRONT COURSE
~;~L, ~e:4///7ø:~LF< TRANSMITTER WIDE
YELLOW SIDE
Figure 19-1. Sample ILS localizer location and signal pattern
the right of the aircraft and the yellow sector to the left While flying inbound in
the back course (extending from the transmitter to the left), the blue sector is
to the left of the aircraft and the yellow sector is to the right (fig 19-1). Both the front course and the back course may be approved for instrument approaches. However, only the front course will be equipped with associated compass locators and lighting aids. Some major airports are equipped with more than one complete ILS system, thus providing a
front course for each end of a selected runway. Normally, only one ILS will be
operated at a time. The localizer provides course guidance throughout the
descent path to the runway threshold from a distance of 18 nautical miles from the antenna. Proper off-course indications are provided throughout the following angular areas of the operational service volume.
(1) To 10 degrees either side of the
course along a radius of 18 nautical
miles from the antenna. (2) From 10 degrees to 35 degrees
either side of the course along a radius of 10 nautical miles. Generally, proper off-course indications are provided to 90 degrees either side of the localizer course. However, some facilities cannot provide angular coverage to that extent because of siting characteristics or antenna configurations or both. Therefore, instrument indications of possible courses in the area from 35 degrees to 90 degrees should be disregarded.
b. Receive operation. Army VHF navigation receivers will receive the localizer signal in the frequency range of 108.1 to 111.95 megahertz. Tuning of the localizer frequency will activate the
course deviation indicator of the course indicator instrument. The localizer signal received will Identify the station by the three letter identification of the station preceded by. the letter "I." An exampie would be I OZR identifying the Cairns AAF iocalizer as printed in the instrument
approach chart. The localizer is usually
capable of transmitting voice. Reliable reception of the localizer signai will be indicated by activation of the course
186
deviation indicator, disappearance of the "OFF" flag associated with the course deviation indicator, and reception of the
coded identifier. No "TO-FROM" indication will be displayed. When a
localizer frequency is tuned, the course selector setting has no effect on the
course deviation indicator as it does when a VOR frequency is tuned. (Operation of the localizer receiver is
described in the operator's manual for the aircraft.)
c. Localizer tracking (fig 19-2). When the aircraft is proceeding inbound on the front course or outbound on the back
course, the indications of the course deviation indicator are directional. That is, if the deviation needle is deflected to the right of center, the localizer is to the right of the aircraft and a turn to the right will be required to return to course and center the needle. However, if the aircraft is flying inbound on the back course or outbound on the front course, the deviation indicator is no longer directional. That is, if the deviation needle is deflected to the left, the localizer course is to the right and a turn to the right will be required to return to course and center the needle.
NOTE: Some aircraft ILS equipment has a reverse sensing capability and the deviation needle is always directional.
d. Sector coiors. Some course indicators have blue and yellow sector colors printed on the face just below the course deviation indicator. The deviation
needle is always deflected into the colored area corresponding to the color indicated on the I LS approach chart. This aids in determining the position of the
aircraft in relation to the localizer course and the direction of the correction to be applied. The amount of correction to return to the localizer course will depend
on the distance between the aircraft and the transmitter and on the direction and
velocity of the wind. Remember that the needle sensitivity when tuned to ILS is
different from that of the VOR. Whereas, the needle sensitivity of VOR is a total of 20 degrees (10 degrees either side of
the center point), the needle sensitivity is
a total of 4 degrees to 5 degrees on the
15 DECEMBER 1984 UPDATE. FM 1-240
localizer (approximately 2V. degrees either side of the centerpoint). The amount of correction to the localizer course should begin with 5 degrees and be narrowed down to 2 degrees as the
transmitter is approached and the signal
pattern narrows. These recommended corrections may be modified as necessary until the wind correction is
determined.

CD NEEDLE DIRECTIONAL: TURN TOWARD NEEDLE
NEEDLE NON DIRECTIONAL: TURN AWAY FROM NEEDLE ,
,
,
I ~~
" 9- 'y .
""'" "0'
ti'l I
NEEDLE NONDIRECTIONAL: TURN AWAY FROM NEEDLE
r~~'($" t27~6\ :- ..
9:
\ .2"CIo.~: ~ ""
'.'.2~12_'" ~
....,,_I8.,,~~,.'F.'
YELLOW SIDE
(iy,~~'D' ,"\ \'
. 6, ~ l1
...
... .' .
9~
.:z" .'" ..,;
...~I2''' '''-,21 15" ~ ..,18.",-
19-4. Glide slope a, Tranf7litter location. The glide
slope transmitter radiates its signals primarily outward along the localizer front course in the direction of the outer marker (fig 19-3). There are numerous false glide slope signals which are radiated simultaneously with the desired signal. Glide slope indications must be ignored unless the aircraft is at or near the appropriate approach procedure altitude within the limits of the localizer course and the approach procedure is specifically named on the approach "ILS," However, there are some runways at which an additional glide slope transmitter is installed to radiate signals primarily directed outbound on the localizer back course, On runways so equipped, the two glide slopes cannot be operated simultaneously, Glide slope transmitters are located from 400 to 600 feet to one side of the runway centerline on the approach end.
b, Receiver operation. Glide slope frequencies are paired with localizer frequencies in predesignated combinations, Receivers will automatically tune the paired glide slope frequency whenever the localizer frequency is tuned, Reliable reception of
,!Oi<
,
/
/
I
BACK COURSE:.::
BLUE SIDE
NEEDLE DIRECTIONAL: TURN TOWARD NEEDLE
,
, ,
I I
I ,
I
,
,
/
I I
CD FRONT COURSE
Figure 19-2. Localizer tracking
the glide slope will be Indicated by the activation of the glide slope indicator and the disappearance of the "OFF" flag located on the face of the course indicator near the glide slope indicator.
15 DECEMBER 1984 UPDATE. FM 1-240 187

TH ICKNESS UP TO 1.40
~\ C\1~0
C\
~
~\ USUAL GLIDE SLOPE ANGLES 20 TO 30
GLIDE SLOPE TRANSMITTER
RUNWAY
750 FT TO 1,250 FT
(VERTICAL ANGLES EXAGGERATED FOR ILLUSTRATIVE PURPOSES.)
0
c. Glide slope indicator. The indications of the needle are always directional. If the aircraft is below the glide slope (fig 19-4, A), the needle wili be deflected upward from the centered position. A pitch attitude/power adjustment must be made to maintain the airspeed within acceptable limits and to decrease the rate of descent or level
off temporarily in order to reintercept the glide slope. If the aircraft is above the glide slope (fig 19-4, B), the pitch
attitude/power must be adjusted to maintain the airspeed within acceptabie limits and to increase the rate of descent in order to reintercept the glide slope. Even after visual contact has been established with the approach lights or
runway, it is recommended that the glide slope be followed until the aircraft is
definitely past the fieid boundary or is approaching the runway overrun. This wili aid in preventing a ianding short of the runway. Also, if the aviator
188
Figure 1~3. Typical glide slope transmitter installation
0
B
.. ~--- A
0
Figure 19-4. Directional aspect of glide slope Indicator
momentarily flies through stratus or fog,
there may be an illusion that the pitch
attitude of the aircraft has moved upward. If the glide slope is still being
flown, only a quick glance will tell that the pitch attitude is normal and has not changed. This will prevent a pitch adjustment downward, causing the aircraft to contact the ground short of the runway at a high rate of descent.
15 DECEMBER 1984 UPDATE. FM 1-240

19-5. Marker beacons and compass locators
a. Marker beacons. A marker beacon is a radio facility capable of transmitting a signal in a vertical direction only. Its
signal is received only while flying over the facility (fig 19-5) within the signal radiation pattern. The. primary purpose of the marker beacon is to provide a
definite radio position fix. The horizontal cross section of the vertical radiation
pattern of a mariker beacon used with ILS is the elliptical pattern. It is quite
narrow so that an aircralt will pass through the pattern rapidly. thereby ensuring the accuracy of the fix. Since all marker beacons transmit on a frequency
of 75 megahertz, the receiver is preset to a 75-megahertz frequency to receive signals from any beacon. The marker beacon signal is modulated with a coded or continuous audio frequency for identification purposes. The marker beacon receiver is arranged so that the signal can be either heard in the headset or seen as a marker beacon light on the aircraft's instrument panel, or both. Airborne marker beacon receivers with a
selective sensitivity feature should
always be operated in the "low" sensitivity position for proper reception of the ILS mariker beacon.
b. Outer marker. The outer marker normally indicates a position at which an
~
aircraft at the appropriate altitude on the localizer course will intercept the ILS glidepath (fig 1~). The OM is identified with continuous dashes at the rate of two dashes per second.
c. Middle marker. The middle marker indicates a position at which an aircralt is
approximately 3,500 feet from the landing threshold (fig 1 ~). This will also be the position at which an aircralt on the glide slope will be at an altitude of approximately 200 feet above the
elevation of the touchdown zone. The MM is identified with alternate dots and dashes keyed at the rate of 95 dotl dash combinations per minute.
Figure 19-5. Marker beacon signal pattern (vertical cross section)
. , RUNWAY t=e~
I
PLAN VIEW (LOCALIZER)
r-t I I I I I I I I I
PROFILE VIEW (GLIDE SLOPE)
OUTER MARKER
MARKER OUTER MARKE R
5 MILES(STATUTE} IS TYPICAL ~ FI9ure 19-6. Outer and middle marker locations and signal pattern
15 DECEMBER 1984 UPDATE. FM 1-240
.~
189

d. Inner marker (1M). The inner
marker, where installed, will indicate a
point al which an aircraft is at a
designated DH on the glidepath between the middle marker and the landing
threshold. This is for Category IIILS
approaches. The 1M is identified with
continuous dots keyed at the rate of six
dots per second.
e. Back course marker. A back course
marker, wherever installed, normally indicates the ILS back course FAF where approach descent is started. The back
course marker is identified with two dots
at a rate of 72 to 95 two-dot combinations per minute.
LOCALIZER TRANSMITTER
}/.........../""
\ 1
COMPASS LOCATORS
,""... , ...
, "'...
""" "'''''''......''
.,' ..' A-n .):>;z--;;-, mZ: ð///x~;;:ø'~f'~Y" <<:"'...;":.",: ',>"
0..".",
'",
f. Compass locators. Compass locator transmitters (fig 19--7) are often situated
at the outer marker site and occasionally found at a middle marker site. They have a power of less than 25 watts, a range of
at ieast 15 miles, and operate between 200 and 415 kilohertz. At some iocations, higher powered radio beacons up to 400 watts are used as outer
marker compass locators. These generally carry transcribed weather broadcast information. Compass locators transmit two-Ielter identification groups.
The LaM transmits the first two lelters of
the localizer identification group and the LMM transmits the last two letters of the
localizer identification group.
RUNWAY ,
'"
19-6. Arrival
Figure 19-8 shows the Cairns AAF
instrument landing system and
surrounding airways and related facilities.
Figure 19-9 shows the ILS runway 6
approach chart for Cairns AAF. Unless being radar vectored to the ILS final
approach course, aircraft inbound to an airport for an ILS approach will usually
be cleared via a feeder route from a fix
on their route of flight to the locator
outer marker to join the localizer course. Figure 19--9 also shows several feeder routes to the Cairns LaM. These routes
are indicated by an arrow to the LaM and contain information concerning the
:(
MIDDLE MARKER
Figure 19-7. Compass locator positions
OUTER MARKER
!$ THE IN TROY E" ""NO Corl folwm 0 ;~~3 262130
--, Os
,Iu~'o
190
Figure 19-8. Area chart representation
15 DECEMBER 1984 UPDATE. FM 1-240

\ \
L\ -l;Yf
\ /
\ ~
,'<> /F:'~~~':~s: RfHOB
. Chao $3
/ ~ ~I ~
~, HOUND \.-.
/" \
~/
Amell 111 Aøtdt 13 )8
ILS or NDB-l RWY 6 AI mo, 'us A,m,'
CA8NS APP CON --- -
-- --, 12'--3448 133.45 237.5 ~ '-""""',
30150-1200 12... .3.... / CAIRNS TOWEll 126.2 241.0
OM> CON I2t, 248.2 / QNC DE' 133.75 370'13 >sIP" .,115 121.15 314.3
IoPPTO /
--- -
---- / ~- /' /
/6011 WffVIi 0 ;!Q!! BVe..
; / 688
f:..
I
\ I
\ \ \
\ \
,
~ (I9.J)"-'
\ 't~\
~
\ '"
{<\- ~ ... ~.p ''(~ >..["1
~ ...,('llII
t "'{.
~ ---- '~'IF --Ii; - --
~.........~ -.-l:ARfD -" 'OM ,
,- I .
061"- ./ 2ODO
MISSS) APPROACH
Climbing right ""'1'1 to 2DDO via Oll val ..157 to RÐIQ8 INT and hold
-I.S cIiIIIb 10 700' betcn
.... -
_... --_2.1' Oao ...... ....... - j GS2.W
"'i'õïi6
-5.IMM--Þ .3
CAYEOOIY " . C D
&-as '" .98 2. ... C--~I -/.0'" 1--10)
s-<oc, 660/.0 ... 1--10) 660/54 ... 1--1)
~, 7.0/.0 ..2 C500-"1 7<<J154 7.0/60 442 1500-1) 4i2 1501)..1111)
CIIOING 74.0-1 760-1 711O-11'J 860-2 442 C500-" 462 1500-1) 421500-'10, 5621600--21
~.., _2. 200 ('lQO-Vt) .98/.0 ... 1200-"1 OS 2.7' .
ILS or NDB-l RWY 6 318\6'N-'W 43'W
"
Agure 19-9. Typical approach chart
CAIRNS AA1 (OIR) fORT RUCKER. ALABAMA
'" "', '" "
'!.
/
-- ELEY 298
10
mZE .e ... ....... o'!!i'
~::::. 0'
,,@ "-
061'" $.6 NM """OM
..
HIRI ~. 6-2" 18-36
.... LOC f lID 5
I.not!. eo 90 120 150 18) Min.s. 31.. 2,14 ta
fORT RUCKEIJ. ALABAMA
CAIRNS AA1 (OIR)
,I.....
15 DECEMBER 1984 UPDATE. FM 1-240 191

course from the enroute fix to the LOM,
distance, and minimum altitude. If ATC
clears the aircraft for the ILS approach prior to reaching 1he LOM, the aircraft
may descend to the minimum altitude for
the feeder route if the aviator desires. If
holding Instructions are received, the
aircraft will maintain the altitude assigned
bl ATC. Prior to reaching the enroute fix
and starting the feeder route, the ADF receiver is tuned to the frequency of the
compass locator, providing that receiver is not required for other navigation.
Tracking on the published feeder route should be started as soon as practicabie
after departing the enroute fix. While on the transition, the remaining navigation
receivers should be tuned and placed in
proper operation for the ILS approach. Passage of the LOM will be indicated by the ADF bearing pointer and by reception of the signal from the outer marker. If the ILS has been tuned, the
course deviation indicator will move rapidly from one side to the other as the
localizer course is crossed,
19-7. Front course Approach After LOM passage, a turn outbound is
made to parallel the localizer course if a
procedure turn barb is depicted on the localizer course. Or the proper holding
pattern entry is made if a holding pattern is depicted and the procedure turn is not
authorized. if a procedure turn is
depicted, the aviator descends to the procedure turn altitude, flying outbound the required time, depending on the
winds and altitude to be lost, while remaining within the designated distance. Upon comnietion of the procedure turn
or holding pattern, and upon intercepting
the localizer course, the aviator should
then fly inbound. The finai approach
descent will begin when the aircraft intercepts the glide slope. if the approach from a depicted holding pattern must be started, a descent to the procedure turn altitude must be made while flying the required holding pattern. Upon intercepting the approach course
inbound, the aviator then descends to
the minimum altitude that is to be used
to intercept the glide slope. This will be
below the glide slope. The final approach
descent will begin when the aircraft intercepts the glide slope. The aviator
notes the time of LOM passage. He can then use this time to determine the
missed approach point in the event reception of the glide slope is interrupted
and the approach must be continued as a localizer approach. A missed approach will be initiated if at the DH, the runway approach threshold, approach lights, or
other markings identifiable with the approach end of the runway are not clearly visible. After the missed approach is satisfactorily initiated, the aviator reports that the approach has been missed, includes the reason (unless
initiated by ATC), and requests clearance
192
for specific action. This action may be for
alternate airport, another ILS approach, or a GCA if minimums are lower.
19-8. Localizer only approach The localizer only approach is flown the
same as the front course ILS approach with the following exceptions:
a. The minimum altitude to the FAF
must ~e observed. b. Timing for determination of the
missed approach point should begin at the FAF.
c. Descent to MDA is initiated upon passing the LOM. The descent should be
started without delay and continued at a
rate that will cause the aircraft to reach the MDA prior to the MAP. This will aid in
arriving at the MDA with enough time! distance remaining to identify the runway
environment and descend from MDA to
touchdown at a normal rate for the
aircraft. d. Use the MDA for a iocalizer
approach (fig 19-9) or for circling according to the approach ciearance received.
e. Missed approach is initiated when the computed time from the iocalizer FAF
to missed approach point (on the localizer course, at the completion of the computed time) has eiapsed and visual
contact has not been established with
the runway environment.
19-9. Localizer back course approach The localizer transmitter produces both a
front course and a back course. The back course is frequently used as an additional approach course (fig 19-10). Normally, a glide slope transmitter is not
installed with the intent of radiating signais toward the localizer back course. Therefore, the back course approach is
usually a nonprecision approach and is
flown in the same manner as the
localizer only approach (para 19-8). A
VOR radial or a marker beacon is usually used to establish the final approach fix.
There is usually no approach lighting
system associated with the back course approach, so visual contact with the runway environment may be more difficult than during a front course approach. It should be remembered that
the course deviation indicator is
directional outbound and nondirectional inbound on the back course.
19-10. Runway visual range a. RVR visibility values are measured
by transmissometers mounted on towers along the runway. A full RVR system
consists of the following:
(1) Transmissometer projector and
related items. (2) Transmissometer receiver
(detector) and related items. (3) Analogue recorder. (4) Signal data converter and related
items. (5) Remote digitsl or remote display
15 DECEMBER 1984 UPDATE. FM 1-240
programmer. b. The transmissometer projector and
receiver are mounted on towers either 250 or 500 feet apart. A known intensity
of light is emitted from the projector and is measured by the receiver. Any obscuring matter such as rain, snow, dust, fog, haze, or smoke reduces the light intensity arriving at the receiver. The resultant intensity measurement is then
converted to an RVR value by the signal
data converter. These values are displayed by readout equipment in the
associated air traffic facility and updated approximately once every minute for
controller issuance to pilots.
c. The signal data converter receives information on the high intensity runway
edge light setting in use (step 3, 4, or 5),
transmission values from the
transmissometer, and the sensing of day
or night conditions. From the three data
sources, the system will compute appropriate RVR values. Due to variable
conditions, the reporting RVR vaiues may deviate somewhat from the true
observed visual range due to the slant
range consideration, brief time delays
between the observed RVR conditions
and the time they are trensmitted to the
aviator, and rapidiy changing visibility
conditions. d. An RVR transmissometer
established on a 500 foot baseline provides digital readouts to a minimum of
1,000 feet. A system established on a
250-foot baseline provides digital
readouts to a minimum of 600 feet, which are displayed in 200-foot increments to 3,000 feet and in 500-foot increments from 3,000 feet to a
maximum value of 6,000 feet.
e. RVR values for Category Ilia operations extend down to 700 feet RVR; however, only 600 and 800 feet are reportable RVR increments. The 800 RVR reportable value covers a range of 701 feet to 900 feet and is therefore a
valid minimum indication of Category Ilia operations.
f. Approach categories with the corresponding minimum RVR values are shown in table 19-1.
.
Table 19-1 Approach categories and RVR values
Ca1egory Visibility (AVR)
Nonprecision Category I
Category 11
Category ilia Category nib
Category lIle
2400 feet 1 BOO feet 1200 feet 700 feel 150leet
0 feet
g. Ten minute maximum and minimum RVR values for the designated RVR runway are reported in the remarks section of the aviation weather report when the prevailing visibility is less than 1 mile and!or the RVR is 8,000 feet or
less. RVR is reported when the prevailing visibility is 1 mile or less and! or the RVR is 6,000 feet or less.

Amelt 13
LoeBe RWY 18 TAUAHASSEf ..." CON 120.8 317." fAt.1AKÞ.$SEE TOWfR- 1 t 8.7(CTAF) 257.8 ON) CON 121.1 348.6 CLNC DEL
':;'7 38.6 / ATIS 11'.4'. / TAlWlASSHïaAl>lO 122.' /
/ / ~ "
I"'
~ ~ \ \
""
'"
,/ / /
/
29' "l.SO'S (F"")
~1Af) -
-
2DOO NofT --IIENQE to M.tta Inl
In- [15.:1')""""""
TALlAHASSEE MUNI (TI.H) TALlAHASSEE, nORIOA
"'-..
-- -....... ""- BACK COURSE
"
---
TALlAHASSEf 117..5 fLH ~_..
ChaJ'I 12'';.'
~
.L .. _.# ... ',,/,00,,::.- :r-r- /!t. A
Iloc.....a}t.;'o.3~9;t ~ ---1-
2000 3>9"111.1)
:::::--
"- 'n r-v:~~ll -- ~/ ~ ~ /'~
--- _V -- --
kill
I! z \ ~
\ \
'" '"
"----
~
'700 179. (2.71
A637
.so"
'-.....
HU""" HT
-.. .;""0"'" ~ ~'!I~ I
3QQ!!- I
-,~: !..W~,-,// C D
5ðQ.1 14 560-1111
~"~I% '~'~1~ 60(). 1 III 6<<J. 2
,t9 eClC).111,) "' (6QO.2)
Wt.en conhol tow- cIos8d ACTIVATE SSALR Itwy 36-111.1.
CAIEGOIY
S-IS
"
560-' 479 [JDO.1)
alCUNG 6QO-1 519 (ðOO-1)
-- LOC Be RWY 1 8
Ml$SED A""<)ACH C6mb to 1600 dtr.et n 10M and hold
.- .
3082A'N-84821 'W
1'-.2&" -
~ (30\
i /
/ /
/
),;
A.38 I /
/ I. T\i"t
/ (,.m. / .'_1 /
Q
'LEV 81
- 179'"6 NM ho... MuIRa" I",
TDlE 81 81
t(i) ~ ( .
! . TWII I ,("7 r.Zf'~
~;I ICIXIlliIO
. " .:
,;~ IEIl Iwy 91 TOllel Iwy 2n I Mill I.., 9l-271
I Hl8L ~ 0I-27L Oftd ''''36
AltoM>>6HM Knots 60 90 120 150 180
M8n, 6:00.40 3100 2:24 2100
TALLAKASSEE, fLOIIOÃ TALLAHASSEE MUNI (TLH)
Figure 19-10. Back oour.e IL5 approech chart
15 DECEMBER 1954 UPDATE. FM 1-240 193

h. Details on the requirements for the operational use of RVR are in FAA
Advisory Circular 97-1, Runway Visual
Range. Aviators are responsible for compliance with minimums prescribed for their class of operations in appropriate
Federal Aviation Regulations and/or operations specifications.
i. The nose of the aircraft, particularly
if a nose high pitch attitude is being
maintained, may also block out the sight
of approach lights, terrain, and runway end environment. Knowledge of these various factors will aid the aviator in
making a safe, smooth transition from
instrument to visual flight for a landing.
I
000 i
I 000 DDD II , aDD 111111\ 1\
ABOVE GLIDE PATH
ON GLIDE PATH
: --- ---I \\\\"\:
BElOW GLIDE PATH Figure 19-11. Standard FAA 2-Þar VASI
19-11, The visual approach slope Indicator (VASI)
The Visual Approach Slope Indicator gives visual descent guidance information during the approach to a
runway. The standard VAS I consists of
light bars that project a visual glide path
194
which provides safe obstruction
clearance within the approach zone. The normal glide slope angle is 3 degrees, however the angle may be as high as 4.5 degrees for proper clearance. On
runways served by ILS, the VASI angle
normally coincides with the eiectronic glide slope angle. Course guidance is
obtained by alignment with the runway iights.
a. The standard VASI installation
consists of either 2-, 4-, 6-, 12-, or 16- light units arranged in downwind and upwind light bars. Some airports serving long-bodied aircraft have 3-bar VASls
which provide two visual glide paths to
the same runway. The first glide path
encountered is the same as provided by the standard FAA VASt. The second glide path is about Y4 degree higher than
the first and is designed for long-bodied
aircraft b. The basic principle of VASI is that
of color differentiation between red and
white. Each iight projects a beam having a white segment in the upper part and a
red segment in the iower p~rt. The light
units of a standard FAA 2-bar VASI are
arranged so that they appear as illustrated in figure 19-11.
c. From a position above the glide
path both bars appear as white. Moving
down to the glide path, the color of the upwind bars changes from white to pink
to red. When on the proper glide path,
the aircraft will overshoot the downwind
bars and undershoot the upwind bars. Thus, the downwind bars appear as white and the upwind bars as red. From a position below the glide path, both light
bars appear as red. Moving up to the glide path, the color of the downwind
bars changes from red to pink to white.
When below the glide path, as indicated by a distinct red signal, a safe obstruction clearance may not exist.
d. Approaching the runway threshold, the visual glide path will separate into
individual lights. At this point, the approach should be continued by
reference to the runway touchdown
zone.
19-12, Simplified directional facility (SDF) and localizer-type directional aid (LDA) These NAVAIDs are similar to a standard ILS localizer and are used for nonprecision instrument approaches. Both transmit signals within the
frequency range of 1 06.1 0 and 1 1 1.95
megahertz. The same techniques and
procedures used in no-glide slope
localizer approaches are used in SDF and LDA approaches. Back course approaches may be associated with
either SDF or LOA. .
a. The SDF (fig 19-12) provides a final
approach course similar to the ILS
localizer described earlier in this chapter.
(1) The SDF course mayor may not
be aligned with the runway and the
15 DECEMBER 1984 UPDATE. FM 1-240
course may be wider than a standard ILS
localizer, resulting in less precision.
Usable off-course indications are limited
to 35 degrees either side of the course
centerline. Instrument indications In the
areas between 35 degrees and 90 degrees are not controlled and should be disregarded.
(2) The SDF antenna may be offset
from the runway centerline. Because of this, the angle of convergence between the final approach course and the runway bearing should be determined by
reference to the instrument approach
chart. This angle is usually not more than 3 degrees. The aviator should always
note this angle since the approach
course originates at the antenna site. An
approach continued beyond the runway threshold would lead the aircraft to the
SDF offset position rather than along the
runway centerline. (3) The SDF signal emitted from the
transmitter is fixed at either 6 degrees or 12 degrees as necessary to provide
maximum lIyability and optimum course
quality. Identification consists of a three letter identifier transmitted in code on the SDF frequency.

-, SDF RWY 36
-CINT!. 127." 3IU Þ'8COM 122.' {CTAP}
G -~ -... wiIhiIIlONM
,~ 21oo~
CAIIGaIY
....
C8CUNG
....
C8CLING
... .'-5622 IfAA)
~~'k
..~~ ~'Ji. ^ 169 J.\,719
POPlAR 81U"/EARl RElDS MEM (POF) JIOItLAIt ILUFf, MISSOUII
J""..,
I j
~ ~
:;;::" , I 'MU
NIIIIM !?
-""""""" ChIiIID 210Dthen right fUnI di,., IE8rIi ND8!1ftI.nd hoW.
2100
,,-- . I
680-1 350 ("'I t
710-1 ""-'1 .:ø-csoio.~"1 CAlI GIIAaAU ALIIMfTU SIT1'1NG MNMUMS
810-1 ""(101).11 -~~) 1-, looo-nt -- 670 (7aO.1)
670(700.'''1 ACnVATE VAIIIwy 36 .UNCOM V'å
RWY 36 W..'N-tO'If'W m
-- -.-. 1-.69
/" ._..,,~.
.
610-1'" -ICID.''')
..2 ... -~
.t.......",
LV
'1.2~- ... Ibapt -.,...,.,.......~ ---r8pOI'Ibog...-.. -Co,. 0ir0tdeDu o8li--, ........ "'" 330
"' ,
",:I; I
I
S5r 5.9 NM TDZI "'-I.'" - 330 IG/Mw
-Iwr~~' .
M8l"" 'I->> FAfto MN 5.9 NM
.... 60 90 120 150 110 . 5;54 3:56 2:S7 J:12 1:51
POPLAI 8I.Uff. MISSOUla
POPLAnLUPf/EAR' AlLDS MEM(POF)
"I"" SIO(....,) 1000-2
61OfJQO.21
Figure 1&-12. SDF approach procedure chart
15 DECEMBER 1984 UPDATE. FM 1-240 195

b. The LOA (fig 19-13) is of
comparabie utility and accuracy to a
iocalizer, but is not part of a complete
ILS. The LOA course width is between 3
degrees and 6 degrees and thus provides a more precise approach
course than the similar SDF installation
which may have a course width of 6
degrees or 12 degrees. The LOA course
is not aligned with the runway. However,
a straight-in minima may be published
where the angle between the runway
centerline and the LOA course does not
exceed 30 degrees. If this angle exceeds 30 degrees, only circiing minima are
published. The procedure depicted in
figure 19-13 is an example of this
condition. The identifier is three letters
preceded by "i," transmitted in code on
the LOA frequency.
Chapter 20 Radar
20-1. General Radar was first installed at airports in the
late 1940s. Further development of radar
systems and their expanded use in the
Air Traffic Control system have greatly
modified and simplified instrument flying
procedures. There are three basic types
of radar systems.
a. Airport surveillance radar (ASR).
b. Precision approach radar (PAR).
c. Airport surface detection equipment
(ASDE).
Section I
Radar Capabilities, Uses, and Limitations
20-2. Operation
a. Radar is based upon the precise
timing of a returning RF echo from a
target and displaying this information to
the radar op.erator so the distance and bearing to this target can be instantly
determined. The radar transmitter must
be capable of delivering extremely high
power levels toward the airspace under
surveillance. The associated radar
receiver must be able to detect
extremely small signal ievels of the
returning echoes. b. These requirements can be better
appreciated when its realized that the
effective size of a small aircraft is
comparable to e small doorway. The
radar system may be expected to detect
and display this aircraft from what small
fraction of energy is reflected from this
surface at renges up to 200 miles under optimum conditions. By means of a
microwave link relay system, an unlimited
number of radar transmitter sites can be remotely located from the control center
to provide navigational guidance along
the air routes.
196
....., LDA-C
'" "'L..552 (FAA'
---
/
--- l~1'E~IJT~- ----
..., M I I
..2568 I
............... U16~1 O~~I
CAUnQN, D6...-d ~ I
81181.... iRIIk:oIlonI [
...... .- a.. to 4000 'Iio VNY 1-101
.. Mh II. and hoW. 0.- -- mP
c.1tGOII1" .
-
CIIC"",,
D
140-2\4 611 (700-~""
LDA 348U'M-I""3't'W
'"'
VAN NUVS (YIlT) "AN ...m.. o.UFQItNA
E!fY 799
Ð
Iwy 1611 Idt ü7O'
I..., 16L1dt251O'
..... ~16I-3'L MI.. .., 161..341 tEll""" 16)oIId SM
fAi to M>> 5.9 NM
.... Man"s.c $-.'" 3:" 2: T ':58
VA"" NUl'S. CALIFOItHIA
VAN NUYS (VNYJ
Figure 19-13. LDA approach procedure chart
15 DECEMBER 1984 UPDATE .FM 1-240

20-3. Primary radar a. The surveillance system provides
the controller with a map-like presentation that shows all the radar echoes ot aircralt within detection range of the radar lacility. By means 01
electronically generated range marks and azimuth-indicating devices, the controller can locate each radar target with respect to the .radar tacility. The controller can also locate one radar target with respect to another. From direct-reading counters on the control panel, the controller determines the bearing and range 01 one aircralt target with respect to another.
b. Another device, a video mapping unit, generates an actual airway or airport map and presents it on the radar display equipment. Using the video mapping feature, the air traffic controller not only can view the aircralt targets, but will also see these targets in relation to runways, navigational aids, and hazardous ground obstructions in the area.
c. The essential difference between airport surveillance radar and air route surveillance radar (ARSR) is in the equipment required to provide greater maximum usabie ranges. ASOE is also a
surveillance system, but it scans the ground rather than the air lor targets. At many major terminals, runways or taxiways may be as lar as 2 miles from the controller's position. During all weather conditions, the ASOE equipment permits the controller to have radar- visual access to all parts 01 the airport although he may not be able to see the far ends of the airport.
20-4. Secondary radar a. The surveillance radar system
cannot identify one specific radar target lound within a display presenting perhaps a dozen or more targets. This problem can be solved with Air Tnaffic Control Radar Beacon System
equipment which is becoming more prevalent in aircralt installations. ATCRBS, sometimes referred to as secondary surveillance radar, consists of three main components.
(1) Interrogator. The interrogator, a
ground based radar beacon transmitter- receiver, simultaneously scans with the primary radar and tnansmits discrete nadio signals which repetitiously request reply from all transponders on the mode. The replies received are then mixed with the primary returns and both are displayed on the same radarscope.
(2) Transponder. The transponder, an airbome nadar beacon transmitter- receiver, automatically receives the signals from the interrogator and selectively repties with a specific pulse group (code) only to those interrogations being received on the mode to which it is
set. These replies are independent 01 and much stronger than a primary radar return.
(3) Radarscope. The radarscope used by the controller displays returns Irom both the primary radar system and the ATCRBS. These returns, or targets, are what the controller refers to in the control and separation of traffic.
b. Identification of primary radar targets and maintaining this identification is a long and tedious task for the
controller. Some of the advantages of ATCRBS over primary radar are shown below.
(1) Reinforcement 01 radar targets. (2) Rapid target identification. (3) Unique display of selected codes. c. A part 01 the ATCRBS ground
equipment is the decoder. This enables the controller to assign discrete transponder codes to each aircralt under his control. Normally, one code will be assigned lor the entire flight.
d. Major air traffic control uses of radar include the following:
(1) Resolving enroute traffic conflicts and providing en route traffic advisories.
(2) Expediting arrivals and departures in the terminal area.
(3) Controlling instrument approaches. (4) Monitoring nonradar instrument
approaches (lLS, AOF, and VOR). (5) Vectoring as a supplementary
means 01 navigation to expedite traffic, avoid traffic conflicts, or avoid observed hazardous weather when possible.
(6) Providing iimiled radar weather information and nadar weather advisories.
CAUTION: Use extreme caution with ATC radar to avoid hazardous weather. ATC radar is not designed to show weather. In fact, it has circuitry for eliminating weather presentations which interfere with lis primary lunction 01 observing air traffic.
e. Virtually all radar ATC relies on one 01 the types of surveillance radar discussed in panagraphs 20-5 and 20-6.
20-5. Air route surveUlance radar The use 01 long-range radar lor control 01 traffic by the air route traffic control centers (ARTCC) is standard procedure. The range of this type of radar is
approximately 200 nautical miles wiIIh altitude coverage to 40,000 leet. Since the area 01 control of an ARTCC normally is more than 200 nautical miles, more than one radar is required to give complete coverage.
a. ARSR indicators normally are centrally located in the air traffic control center. However, the antennas are located at remote sites which produce the best radar coverage 01 the area. An outiying radar unit can serve two or more centers simuitaneously.
b. Either transparent map overlays or electronically displayed video maps are normally used on the controller's scope to indicate the location 01 NAVAJO,
airways, and reporting points. In effect,
t5 DECEMBER 1984 UPDATE. FM 1-240
the controller can see all 01 the air traffic wilhin his area 01 responsibility.
21Hì. Airport surveillance radar The range 01 ASR is usually a 30- to 50- nautical mile radius from the antenna site. An overlay on the scope or a video map (para 20-5b) shows lacilities and landmarks in the area. The two basic
purposes 01 ASR are for radar approaches and radar control 01 air traffic in the terminai area by approach control facilities.
20-7. Limitations a. It is important to recognize that
there are limrtations to radar services and that ATC controliers may not always be able to issue traffic advisories concerning aircralt which are not under ATC control or cannot be seen on radar. Radio waves normally travei in a
continuous straight line unless they are- (1) "Bent" by abnormal atmospheric
phenomena such as temperature inversions.
(2) Rellected or attenuated by dense objects such as heavy clouds, precipilation, ground obstacles, or mountains.
(3) Screened by high terrain features. b. The bending 01 radar pulses, olten
called anomalous propagation or ducting, causes extraneous blips to appear on the radar operator's display. It is difficult to solve the effects 01 anomalous propagation, but using beacon radar and electronically eliminating stationary and slow moving targets by a method called a moving target indicator (MTI) usually negates the probiem.
c. Radar energy that strikes dense objects will be reflected and displayed on the operator's scope. This will block out aircralt at the same range and greatly
weaken or comptetely eliminate the display of targets at a greater range. Again, radar beacon and MTI are very effectively used to combat ground clutter and weather phenomena (fig 20-1). A
method of circularly polarizing the radar beam will eliminate some weather returns. A negative characteristic 01 MTI is that an aircralt flying a speed that coincides with the cancelling signal of the MTI (tangential or "blind" speed) may not be displayed to the radar controller.
19~

Figure 20-1. Precipitation attenuation
d. Relatively low altitude aircraft will
not be seen if they are screened by
mountains or are below the radar beam due to the earth's curvature. Tha only
solution to screening is the installation of strategically placed multiple radars which
are present in some dreas.
, e. There are several other factors
which affect radar control. The amount of reflective surface of an aircraft will
determine the size of the radar return. Therefore, a small aircraft or a jet fighter will be more difficult to see on radar than a large commercial jet or military
bomber. Here again, the use of radar beacon is invaluable if the aircraft is
equipped with an airborne transponder. All ARTCC radars in the conterminous US and many airport surveillance radars have the capability to interrogate MODE C and display altitude information to the
controller from appropriately equipped
aircraft. However, there are a number of airport surveillance radars that are still
two dimensional (range and azimuth)
only and altitude information must be obtained from the pilot.
f; At some locations within the ATC
enroute environment, secondary-radar- only (no primary radar) gap filler radar systems are used to give lower altitude
radar coverage between two iarger radar
systems, each of which provides both
primary and secondary radar coverage. In those geographical areas served by secondary-radar only, aircraft without transponders cannot be provided with
radar service. Additionally, transponder equipped aircraft cannot be provided
with radar advisories concerning primary
targets and wea1her.
g. The controllers' ability to advise the
aviator when flying on instruments or in
visual conditions of proximity to another aircraft will be limited if the unknown aircraft is not observed on radar, if no flight plan information is available, or if
the volume of traffic and workioad prevent his issuing traffic information.
The controller's first priority is given to
198
establishing vertical, iateral, or longitudinal separation between aircraft flying IFR under the control of ATC.
h. Radar units operate continuously at the locations shown in DOD Flight
Information Publications and their
services are available to all pilots, both civil and military. (Contact the associated
control tower or ARTCC on any frequency guarded for initial instructions,
or in an emergency, any FAA or military facility for information on the nearest radar service.)
Section II Radar Air Traffic Control Procedures
2o--a. Identification All radar air 1raffic control services depend basically upon the positive
identification of the aircraft target being
controlled. The controller identifies a
primary or radar beacon target by performing the following:
a. Observing a departing aircraft target within 1 mile of the takeoff runway end.
b. Observing a target whose position with respect to a fix corresponds with a
direct position report received from an aircraft and the observed track is
consistent with the reported heading or route of flight.
c. Observing while a target makes an identifying turn(s) of 30 degrees or more, provided both of the following conditions
exist (1) Except in the case of a lost
aircraft, a pilot position report is received which assures him that the aircraft is
within radar coverage and within the area being displayed.
(2) Only one aircraft is observed making those turns.
d. Receiving a coded transmission
from a radar beacon transponder In the
controlled aircraft.
NOTE: Radar controi is lost the moment identification is lost. If radar identification is lost, 1he radar controiler will immediately advise the aviator. If
necessary, the controller then issues instructions and clearances so the aviator may resume conventional control.
20-9. Transfer of radar control (handoff>
Transfer of radar control (handoff) from
one controller to another involves positive identification of the target aircraft by the receiving controller. Methods for transferring radar control are as follows:
a. The controller physically points out the target to the receiving controller.
b. The controller informs the receiving
controller of the following:
(1) The distance and bearing of the target from a fix or transfer point shown
on both radarscope displays.
(2) The observed tracks of the target
unless already known.
15 DECEMBER 1984 UPDATE .FM 1-240
c. Radar beacon transponder is used.
20-10. Enroute control procedures
a. Separating. Within 40 nautical miles of the radar site, aircraft under positive
radar control are provided a minimum horizontal separation ot 3 nautical miles
between all identified targets. If the controlled aircraft are more than ,40
nautical miles from the radar site, the required separation is 5 nautical miles
because target-distance-fixing capability
is not as precise. At this distance, two targets which are close together, 3
nautical miles for instance, can appear as one on the radarscope. Aircraft
normally are kept a minimum of 1.5 nautical miles away from the boundary of adjacent airspace when less than 40 nautical miles from the antenna. When 40 nautical miles or more from the
antenna, the minimum is 2.5 nautical
miles. Horizontal separation is provided
between aircraft flying at the same altitudes. The radar controller has a
number of different altitudes and flight levels under his jurisdiction. Separation
can also be effected by assignment of
different altitudes or flight leveis.
b. Routing. Established airways are used by radar controllers for enroute traffic. However, if required minimums of
separation and obstacle clearances are
met, controllers may alleviate traffic conflicts by using radar vectors which
depart from established routes. It is
possible to request deviation from established routes to avoid hazardous
weather conditions. When the controller vectors the aircraft off the assigned
route, he will normally specify the point
which the vector will take the aircraft and the purpose of the vector. If
communications fail, the aviator should
proceed to the point specified.
c. Assigning altitude. In some cases, en route radar provides the controller with
target aititude data. I n other cases, the
controller must rely on the aviator's reported altitude. In either case, altitude
assignments are made in a manner similar to those of nonradar traffic
control.
(1) In certain cases, the radar controller may assign an altitude below the minimum enroute al1itude (MEA) for the airway. However, an altitude assignment below the minimum obstruc1ion clearance altitude (MOCA)
will not be made. (2) If the controller assigns an altitude
below the MEA, he wili realize that the aircraft may be unable to navigate
because of the possibility of passing
below the minimum reception altitude of
the radio facility. Therefore, the radar controller will navigate the controlled aircraft past all obstacles by offering
radar vectoring service.

20-11. Departure and arrival control procedures
a. Departures. Wherever practicable, radar departure routes are established as standard instrument departures (SID). Channelized altitudes are placed under the jurisdiction of radar departure control. The use 01 standard departure roules and altitudes reduces the amount 01
coordination between departure/arrival control and tower VFR control facilities.
(1) Departure routes normally are based on the use of availabie radio facilities and do not require radar service for navigation. However, for an operational advantage, the controller may provide vectoring service for navigation to achieve adequate separation, noise abatement. avoidance of hazardous weather, or other reasons. If given a radar departure which deviates from established SIDs or routes, the aviator will be advised by the controller of the route or SID to which the aircraft is being vectored.
(2) Radar separation for departures is
maintained as required by traffic conditions and within the saturation limits of the radar facility. Handoff to enroute radar or transition to nomadar separation is accomplished as traffic conditions permit. In all cases, the transition to nonradar separation is completed well within the limits of radar coverage.
b. Affivals. (1) Routing to nonradar facilities, such
as ILS, ADF, and VOR can be accomplished with radar control of arriving aircraft. Radar feeder routes may be established to "feed" traffic to the final appro~ch fixes as required.
(a) A radar leeder route is similar to a
conventional nonradar feeder route. The nonradar feeder route is usually a
straight course from an outer fix to an approach fix with bearing, distance, and minimum altitude published. However, a
radar feeder route may employ several "legs" with different courses and different minimum altitudes on the legs. This multi-legged route is also referred to as the radar pattern (random vectors). In
some cases, it may resemble a
conventional VFR traffic pattern with downwind and base legs.
(b) The radar feeder area and required obstacle clearance are different from those required for nonradar leeder routes. In general, radar feeder routes allow greater airspace use because known obstacles can be plotted on the overlay map of the radarscope and identified aircraft targets can easily be provided with adequate obstacle clearance.
(c) Provided the radar controller complies with the minimum separation
and obstacle clearance standards required by the ATC procedures manual, he can vary radar traffic patterns to resolve conflicting traffic conditions. If a
nonradar final approach is being used,
the controller can use radar vectoring to the final approach course.
(2) If the final approach of the aircraft is to be controlled by radar GCA, the vectoring to the linal approach course is
the preliminary part 01 the GCA. The radar pattern leading up to the final
approach course can assume any configuration which takes into account the location of landing and navigation
laciiities, arrival routes, and the airport. (a) The GCA final approach may be
one 01 two types. However, the type used has little effect on the radar pattern leading to the final approach segment, except perhaps at the point where the final approach course is intercepted.
(b) Patterns are established Irom outer fixes to intercept the final approach
course. For typical approach patterns, see figure 20-2. While the aircraft is in the radar pattern, prior to the time it is
turned on final approach, the radar controller issues appropriate advisories to assure effective completion of the radar approach.
20-12. Radar approaches The two types of radar final approaches are airport surveillance radar and precision approach radar. The type employed depends on the equipment available, landing runway, weather, and traffic conditions. ASR equipment provides the controller with positive data on range and azimuth of the aircraft target. With PAR equipment available, however, the final approach can be more precisely controlled. To the controller, the basic advantages of PAR are that he can determine the exact aircraft position in relation to the glidepath. Also, the range and azimuth can be determined w~h greater accuracy. In general, where PAR is employed, approach minimums are lower.
a. Initial approach. Unless the aviator has stated that he has received the automatic terminal information service (ATIS) broadcast, the controller will Issue the following approach information.
(1) Altimeter setting. (2) Ceiling and visibility if ceiling at the
airport of intended landing is reported below 1,000 feet or below the highest circling minimum, whichever is greater, or if the visibility is less than 3 miles.
(3) Any special weather observations. (4) Pertinent information on known
airport conditions If they are considered necessary to the safe operation of the aircraft concerned.
b. Final approach. The controller will issue the following information before starting the final approach:
(1) Type of approach and runway to which the approach will be made.
(2) Aircraft position at least once. In
addition, he will advise the aviator to perform the landing check.
c. ASR-final approach. On finai
approach, the aviator will be given the
15 DECEMBER 1984 UPDATE. FM 1-240
frequency and told to contact the final controller. The final controller will make a
radio check with the aviator and then advise him not to acknowledge any further transmissions. Heading
corrections will be issued as required to keep the aircraft on the final approach course. The controller must transmit at ieast once every 15 seconds or the aviator will assume that he has lost communications with the controller. " a
full stop landing is to be made and any portion of the final approach conducted under iFR conditions, a wheels-down check will be made and the missed approach instructions issued. Advance notice 01 where the descent will begin and the straight-in MDA will be furnished. When reaching the descent point, the controller will instruct the aviator to
descend to the MDA. Course guidance and distance from the runway, airport, or missed approach point will be furnished on the remainder of the approach. When approach guidance is discontinued, the aviator will be advised of his position and instructed to execute a missed approach unless the runway approach or runway lights or airport is in sight.
d. PAR-final approach. After being
turned on final, the transfer to final controller, final controller radio check, and course guidance will be issued as in ASR linal approach, except that the controller must transmit at least once each 5 seconds. Thewheels-down check will be made and missed approach instructions issued if required (d above). Approximately 10 to 30 seconds before final descent, the aviator wiil be informed that he is approaching the glidepath. The decision height will be issued only if he requests it. At the point where final descent is to start, he will be instructed to begin the descent. Glidepath and course information and distance Irom runway will be issued until the aircraft is over the landing threshold. The aviator will be informed when he is at decision height.
e. No-gyro radar approaches. These approaches, ASR or PAR, will be flown as outlined above, except the controller will issue instructions as to when to start and stop the turns (headings will not be issued) and when to make half-standard rate turns on the final approach.
20-13. Monitoring of nonradar approaches
a. Aircraft conducting precision or non precision approaches will be monitored by PAR equipment if the PAR final approach course coincides with the NAVAID final approach course from the linal approach fix to the runway and if
one of the following conditions exists: (1) The reported weather is below
basic VFR minima. (2) The aviator makes a request. b. Surveillance radar will not be used
to monitor nonradar approaches.
19

VOR
~ ~ >;-
>"A:) A:) .,:10
>"0 "5-
Öo \
~ %
OUTER FIX
/
eþ..S~
Figure 20-2. Radar patterns to GCA final approach
200 15 DECEMBER 1984 UPDATE. FM 1-240

c. The controller will inform the aviator that his approach will be monitored. The aviator should state the frequency to be used if iI is not the same as the communications frequency used for the
approach. In addition, the controller
will- (1) Advise the aviator that when
executing a nonprecision approach that
glidepath advisories are not provided.
(2) Infonm the aviator when he is
passing the final approach fix. (3) Advise the aviator if his aircraft
goes well above or below the glidepath, well left or right of the course, and whenever it exceeds the radar safety limits. These will be repeated if no correction is observed.
(4) Advise the aviator that if he is
unable to proceed visually, he should
make a missed approach after repeated advisories if the aircraft is observed proceeding outside the safety limits or if
a radical target deviation is observed. (5) Provide monitor information until
the aircraft is over the landing threshold
or commences a circling approach.
20-14. VFR traffic expanded radar service As IFR traffic volume and radar capability permit, future radar service will increase assistance to VFR traffic. As more airports and control centers become equipped with modern radar, this
expanded service will become widespread. For the types of service and the existing procedures to employ them, see current navigation publications. Among these services to VFR traffic are the followi"g:
a. Sequence of arriving traffic.
b. Traffic advisories.
c. Weather advisories.
20-15. Radar assietance within air defense Identification zones
a. Radar assistance is available on a
24-hour basis to all identified aircraft within the limits of any Air Defense Identification Zone (ADIZ).
b. The following services will be provided when and where military commitments penmit, but no responsibility for direct control of aircral! is accepted:
(1) Track and ground speed checks. (2) Position of aircraft in latituda and
longitude or by bearing and distance from a known point.
(3) Magnetic heading to steer and distance to the nearest aerodrome or other designated points.
(4) Position of heavy cloud in relation to the aircraft.
c. Procedures to be followed would be
to- (1) Use frequency 122.2 megahertz. (2) Call "Radar Assistance." The
subsequent call sign of the ground station will be given by that station.
(3) Request the type of assistance desired.
(4) Make inilial contact at the highest practicable altitude.
d. The radar assistance is advisory only and does not absolve the aviator of the responsibility for safe navigation of his aircraft and compliance with ATC
clearances or other required procedures.
e. If commitments preclude granting of
assistance, the ground station will transmit the word "unable." No further explanation will be given.
f. All speeds are given in knots, distances in nautical miles, and bearings
or headings in degrees magnetic.
NOTE: Canadian military assistance provide bearings in true degrees.
Section III Transponders
20-16. Capability a. Airborne transponders have a
select code capability on MODE 3A wilh a 4,09B,code, four-digit select capability that is compatible with ATC ground interrogation equipment.
b. Some transponders are equipped with a MODE C automatic altitude reporting capability. This system converts aircraft altitude (100-foot increments) to coded digital infonmation which is
transmitted together with MODE C
framing pulses to the interrogating radar facility. The manner in which transponder paneis are designed differs. Therefore, the aviator should be thoroughly familiar with operation of the transponder so that both he and ATC can reaiize its full
capabilities. (1) The transponder is adjusted to
reply on the MODE 3A code specified by ATC and (il equipped) to reply on MODE C with allitude reporting capability activated. This is unless deactivation is directed by ATC or the installed aircraft equipment has not been tested and calibrated as required by FARs. If
deactivation is required by ATC, the aviator should turn off the altitude
reporting feature of the transponder. An
instruction by ATC to "STOP ALTITUDE SQUAWK, ALTITUDE DIFFERS (number of feet) FEET," may be an indication that the transponder is transmitting incorrect altitude information or that there is an incorrect altimeter setting. An incorrect altimeter setting has no effect on the MODE C altitude information transmitted by the transponder (transponders are preset at 29.92), but it would cause the aviator to fiy at an actuai altitude different from the assigned altitude. When a controller indicates that an aititude readout is invalid, the aviator should initiate a check to verify that the aircraft altimeter is set correctly.
(2) The aviator reports the exact altitude or flight level to the nearest hundred foot increment when both
15 DECEMBER 1984 UPDATE. FM 1-240
establishing initial contact with an ATC facility and when aircraft flying with operating MODE C altitude reporting transponders. Exact altitude or flight level reports (on inilial contact) provides ATC with information required prior to using MODE C altitude information for separation. This will significantly reduce altitude verification requests.
c. When filing a domestic IFR flight plan (DD Form 175 or equivalent), indicate the radar beacon transponder or special navigation equipment capability
or limitation by adding a slant (I) and the
appropriate symbol immediately following the aircraft designation, such as CH-471 T or T -421 A. (Refer to the Airman's Information Manual or FLIP to find
appropriate code ietters.) d. Transponders will be operated in
"STBY" while taxiing for takeoff and "OFF" after landing. (For transponder operation, see operator's manual for appropriate aircraft.)
NOTE: Pilots should be careful not to reply on any code not specifically assigned by a controller. To do so could result in erroneous target information on the controller's scope.
20-17. Phraseology Radar beacon code word phraseoiogies used by ATC controllers in air-to-ground communications, plus expected pilot
action under specified conditions, are as follows:
a. SQUAWK (number)-Operate transponder on designated code in MODE 3.
b. IDE NT-Active appropriate iDENT control.
c. SQUAWK (number) AND IDENT -Operate transponder on designated code in MODE 3 and ectivate appropriate IDENT control.
d. SQUAWK STANDBY-Switch transponder to "STBY" position.
e. SQUAWK LOW/NORMAL-Operate sensitivity as directed. Transponder is operated in "NORMAL" position uniess ATC specifies "LOW."
f. SQUAWK ALTiTUDE-Activate MODE C with automatic aititude reporting.
g. STOP ALTITUDE SQUAWK-Turn off altitude reporting switch and continue transmitting MODE C framing pulses. If
the equipment does not have this
capability, turn off MODE C. h. STOP SQUAWK (mode in
use)-Switch off designated mode. i. STOP SQUAWK-Switch off
transponder. (STANDBY recommended.)
j. SQUAWK MAYDAY-Operate transponder in the "EMERGENCY" position-MODE 3, code 7700.
k. SQUAWK VFR-Operate transpon- der on code 1200 or as assigned by ATC.
20

Section IV Ground Weather Radar
20-18. Operation In addition to traffic control, there are other applications of radar which contribute to efficient aviation operations. The Nationai Weather Service, the United States Air Force, and United States Navy operate radar storm detection sites. Some ARTC centers have access to radar sets designed tor weather observation. As a result of these efforts, a large part of the continental United States and some oversea areas provide radar weather service.
20-19. USAF pilot-to-metro service (PMSV) Direct communication service between pilots and torecasters or observers is
provided at many locations by the USAF. At locations where the service is
available. metro can be contacted on a
specified frequency. The forecaster or observer will reply to the call and can furnish an in-flight weather advisory by a
qualified weather forecaster or observer who has access to weather radar coverage of the flight area. While operating on an IFR flight plan, the aviator must obtain permission from the controller to leave the control frequency long enough to obtain a weather advisory. Subsequent vectoring, which may be necessary to avoid hazardous storm areas, can be coordinated between the aviator, observer or
forecaster, and controller. (For metro service listings and frequencies, consult the current navigation publications.)
20-20. FAA weather radar advisories In some cases, FAA facilities obtain weather information from weather radar sets of the individual facility and relay this Information to the control center or flight service station (FSS) for broadcast to pilots as a weather advisory. In other cases, the traffic controller's facility may have a weather radar set or the controller may issue a weather advisory based on weather data obtained from the air traffic control radar set.
NOTE: Traffic control radar sets, however, de-emphasize weather phenomena since the image of storm areas and precipitation tends to obscure aircraft targets. Consequently, the sets are designed to "filter out" echoes from storms and precipitation. The resulting display on these sets does not portray, in
great detail, the existing weather phenomena. Therefore, the aviator should obtain weather data from a
weather radar source if possible.
202 15 DECEMBER 1984 UPDATE. FM 1-240

Chapter 21 Tactical Instrument Flight
21-1. General To perform tactical instrument flight safely, the aviator must have a thorough knowledge of the enemy situation and air defense (AD) capability. With this information and a knowledge of where and when a covering force is employed, an emoute course and flight altitude can be planned which may decrease the vulnerability of the aircraft to Threat weapons. The degree of vulnerability that remains after applying the procedures in this chapter must be taken into consideration before conducting instrument flight in a high threat environment. The aviator should be aware that a friendly threat exists over the battlefield. Unless the proper IFF code and flight corridors are used, there is a danger of being destroyed by friendly AD weapons. Additionally, the aviator must recognize the enemy's electronic warfare (EW) capability. This threat may be used to degrade the radio signal of the NAVAIDs or increase the enemy's threat acquisition capability. The success the aviator achieves on the battlefield will depend on how he learns to cope with the enemy threat. The aviator must use every means to avoid, suppress, or destroy the enemy AD and EW systems.
Section I
Tactical Employment Considerations
21-2. Tactical Instrument flight Tactical in.trument flight will only be performed when meteorological conditions at origin or enroute preclude nap-of-the-earth (NOE) flight.
a. Tactical instrument flight is defined as "flight under IMC in an area directly affected by the Threat." It is used as a
means to complete an assigned mission that is critical in nature when meteorological conditions at origin or enroute preclude NOE flight.
b. Tactical situations can be expected which require single-ship operations to be conducted within the threat environment during IMC. In order to survive during such missions, aviation units must operate under instrument conditions at altitudes well below the eltitudes specified in civil instrument flight
rules (I FR). Standard civil rules shall be terminated at the initiation of hostilities in
favor of joint military control throughout the entire battle area. Though civil facilities may continue to function, procedural control will be translated into
tactical standards. Tactical instrument flight will ensure maximum support of ground tactical units by allowing aircraft to move ,about the battlefield, even in
adverse weather under high threat conditions. Survivability will require techniques which go beyond the use of
today's conventional airways and NAVAiDs. Sophisticated approach procedures and equipment will not be available. Instead, instrument flight will
be performed under marginal conditions requiring the highest level of aviator proficiency rather than equipment. Aircraft will operate routinely at reduced altitudes with minimum navigational aids and minimum ATC facilities and regulations. Increased dependence on preflight pianning and aircrew proficiency will be essential to accomplish the mission using the tactical instrument mode of flight. Both Threat weapons and radar will dictate where and when tacffcal instrument flight will be performed.
21-3. Training Tactical instrument flight can be successfully accomplished through diligent and thorough training of both aircrews and air traffic management personnel. Through testing, training, and practice, the capability can become a
reality. Tactical instrument flight training
not only-should familiarize aviators with the principles and employment of tactical instrument flight in the high threat environment, but it must teach them to
execute an instrument flight and approach into a landing zone (LZ) using minimum electronic communication and navigation devices with confidence. Unit training must be oriented toward accomplishment of the unit's mission under adverse weather and threat conditions with a minimum of assistance from electronic communication and navigation devices. Air traffic
management personnel and aircrews must be integrated into the training. Units must incQI'Porate tactical instrument functions into their everyday missions. Lower altitude flying, minimal use of navigation and communication equipment, detailed premission planning, and postmission debriefing are routine training practices during normal operations. Training must emphasize flexibility in order for aviation elements to respond quickly and reliably in a wide range of adverse weather situations.
21-4. Principles of employment Because tactical instrument flight is
performed under marginal conditions, greater responsibility is placed on planning and flight-following. When operating under FAA control, the aviator is issued low altitude enroute charts. These charts identify the location of NAVAIDs, headings, and altitudes. Flight- following procedures are identified in
Army regulations and publications. When performing tactical instrument flight in the
corps and division rear areas, these procedures will be established by the
corps air management element (CAM E) or the division air management eiement (DAME). The principles listed beiow must
15 DECEMBER 1984 UPDATE. FM 1-240
be considered in pianning and conducting tactical instrument flight.
a. Threat weapons. Threat weapons can engage aircraft operating in friendly
airspace. Normally, antiaircraft artillery weapons cannot engage aircraft along the FLOT when the covering force is
deployed, However, detection by the weapons system is possible. The primary threat to aircraft conducting tactical instrument flight in the area along the FLOT will be the air defense missile. To degrade the effectiveness of these weapons, suppression to include radio jamming, artillery fires, and chaff should be used when the mission is being flown.
b. Flight clearance and flight-following
procedures. Whenever tactical instrument flight is planned, the aviator must know the ATC procedures to be followed. The procedures to be used will be determined by the area where the flight is conducted and whether communications can be established with an ATC facility. The followirig examples specify areas and flight-following procedures. The purpose of each procedure is to maintain effective control of airspace over the battlefield.
(1) Rear area to tacffcaloperations area. Although there is currenlly no requirement for radio contact or flight following in areas forward of the division
rear, it is advisable to maintain contact with an A TC facility as long as possible
and then assume responsibility for making contact with other tactical forward units for flight-following. Air traffic control procedures are determined by the aviator's location on the battlefield.
(2) Tactical operations area to rear area. The aviator serves as his own initial clearance authority and attempts to make contact with ATC elements enroute. The flight should follow closely the previously planned and coordinated flight plan.
(3) Flight initiated from unit heliporf or airfield.
(a) Clearance for tactical instrument flights is secured from the division Flight Coordination Center element through
company operations prior to takeoff if communications exist.
(b) When radio contact is not possible or feasible, the ATC elements should be contacted by landline for flight filing and clearance prior to takeoff.
(4) Flight originating from a tactical site.
(a) In the event tactical instrument flight is required from a forward tactical location, such as a forward arming and refueling point (FARP), and communications cannot be established with an ATC facility, the aviator must serve as his own initial clearance authority.
(b) As soon as practicai after the flight is initiated, attempt should be made to establish radio contact with an ATC
203

AREA OF POSSIBLE COMMUNICA TIONS JAMMING ANO MONITORING
\ EARL Y WARNING AND TRACKING
\ RADAR RANGE
/ / -;- /---
- -
/-- ~~F;;C~IV-; R:~E-O; I I /- AIR DEFENSE MISSILES
I I { ,
I ,
I I FRONTliNE ANTIAIRCRAFT MISSILES
, I
\ ; I. ' L FRONTliNE ANTIAIRCRAFT ARTY
-- I k' --- --\--------- ~--- -L 'i num --- I /
_. -- I )( -- --
I I
FLIGHT T ~ --:;--- ----L--l----- ROUTE CORPS HOT COVERING ENEMY REAR BOUNDARY FORCE AREA AREA
element or a ground tactical unit to relay the flight plan. The aviator should follow the original tactical instrument plan as closely as possible until either direct contact with an ATC element is made or a ground unit relay is established.
(5) In-flight transition from terrain flying to tactical instrument fiight. When the
, tactical mission requires the transition from VMC to tactical instrument flight,
the aviator must carefully analyze his map to select a route and altitude to provide obstacle and terrain avoidance.
(a) When communication with an ATC element is not possible, the aviator serves as his own clearance authority until direct communication with an ATC element is made or contact with a
ground un;: relay is effected. (b) Where communication with an ATC
element is possible, the aviator should report his location and Intended flight
plan. He should also maintain direct ATC communications as long as possible until flight termination. If enroute communication is lost, the reported flight plan is followed as closely as possible until contact is regained, either direct or through a relay, or the flight is
terminated. If communications with an ATC element cannot be reestablished, flight-follow with a ground tactical unit.
(6) Flight in a severe EW threat or radio silence environment.
(a) Of necessity, much of tactical flight will be conducted in a severe EW threat environment. To avoid electronic detection, NAVAJOs must be restricted to operation only when they are to be used and then only intermittently. In order to avoid detection and destruction, the electronic signature of NAVAl Os and aircraft must be kept to a minimum, thereby making radio silence a requisite for mission accomplishment.
(b) The aviator should use landline communications when available for coordinating and clearing tactical
204
A graphic side view of the Threat as it
might exist on a high thr~at battle- field. Hostile aircraft may be present over the entire combat lone.
Figure 21-1. Threat profile
instrument flights with an ATC element prior to takeoff. Iflandline communication is not possible, secure radio channels should be used. Close initial coordination with the ATC element is essential prior to initiating the flight to eliminate unnecessary radio communications during flight.
(c) During a radio silence environment, voice radio communica tron for naviga. tion and fiight.foilowing is not possible. The aviator must coordinate in detail prior to takeoff when possible, serve as his own clearance authority during in-flight
transitions from VMC to tactical instrument flight, and often operate a
flight-following facility or unit while
enroute. '
21-5. Flight altitudes Flight altitude is determined by the height of terrain obstructions and the availability of terrain for masking. Flight altitudes will
be dictated by the enemy air defense threat. The limits will be less than those specified in AR 95-1 and may be as close to the ground as the terrain obstacles permit. Figure 21-1 shows an example of how the AD threat will
appear on the modern battlefield. The overriding concern in tactical instrument flight is to remain below the enemy air defense threat and continue to maintain a safe altitude above terrain obstacles in
order to complete the mission. The aviator can use instrument meteorological conditions and procedures in rear areas where the effective range of the enemy air defense missiles and other weapons are not a
threat. However, he may be within the
range of the enemy early warning and tracking radar. It is important that the aviator is aware that the aircraft is within the radar range even though he is still outside the effective range of the enemy air defense missiles and other weapons.
15 DECEMBER 1984 UPDATE. FM 1-240
Although he may be beyond the range of ground-based weapons, he may be engaged by enemy aircraft.
a. As the aviator continues to move forward toward the FLOT, he will come within the effective range of the air defense weapons. At this point, he must remain Jow enough to avoid acquisition by the early warning and tracking radar. In doing so, the flight altitude is reduced to a level below the enemy threat, yet high enough to provide a safe clearance of terrain obstacles. As the aviator flies toward the FLOT, the capability of the enemy radar to acquire the aircraft will continue to increase even at lower levels. He must continue to adjust the flight altitude and route accordingiy to remain below this threat or to be masked by the terrain.
b. Upon reaching the forward area or the destination point, the aviator will use a tactical instru ment beacon to make the approach if visual flight conditions are not encountered. If visual conditions are encountered at the destination, or while enroute, he descends to terrain flight altitude and continues the mission.
c. Conversely, as the aviator flies from a forward location toward the rear of the battlefield, he can progressively increase the flight altitude. A unit's forward or rear boundaries cannot be used as a reliable indication of the altitude to be flown to avoid the enemy air defense threat. This is because these boundaries are highly mobile, are not always the same distance from the FLOT, or subject to the same terrain formations. The unit boundaries depicted on figure 21-1 are presented only to show how the threat will increase as the aviator flies nearer the FLOT and is forced to select iower flight aititudes. Each mission requiring the use of tactical instrument flight must be individually planned, along with an appropriate altitude profile planned to

remain clear of both the threat and terrain obstacles.
21~. Flight routes Flight routes will be determined by the availability of NAVAIDs. The threat, terrain, weather, and availability of radio beacons all affect route selection. Considerations for each factor essential in establishing tactical instrument flight routes include the following:
a. Straight-line flight between takeoff pOint and destination will be precluded in many instances by both the terrain and the enemy air defense threat. in selecting the flight route, the aviator must carefully analyze the threat as it affects potential flight routes. In most instances, the threat will be the overriding factor in selecting flight routes. The aviator should make a thorough map reconnaissance of the possible route to 'the destination and return to determine the best route which will provide threat avoidance and terrain obstacle clearance. In tactical instrument flight, terrain obstacles can serve as valuabie assets to deny enemy electronic detection just as they are used for concealment and masking during visual terrain flying in forward areas of the battlefield.
b. The availability and location of navigational aids are significant factors in
route selection. Regardless of what the weather condition may be, the aviator shouid know the location and availabiiity of the NAVAIDs within his area of operation. NAVAIDs in the rear area will be more widely spaced because the radio signp' range can be received at a
greater range due to the higher altitude where the aircraft is flown in this area. NAVAIDs must be placed closer together in the forward area due to the limited range where the radio signal can be received at low altitudes. Route selection in the forward area will be restricted because of the reduced range of the beacons and limited number of beacons. To increase the unit's capability to conduct tactical instrument flight, NAVAIDs must be mobile and highly responsive. Routinely, they must be capable of rapid displacement on short notice.
c. The enemy will deploy highly sophisticated electronic warfare systems. Defeating this capability and protecting aviation assets will require maximum tactical ingenuity and resourcefulness. One of the most effective tactics will be to keep radio communications to a
minimum. In selecting a route, communications security and a capability for maintaining communications should be prime considerations. Using terrain to mask the aircraft from possible acquisition by the enemy, early warning radar may also mask the aircraft from NAVAIDs and from communications with friendly units. Considering also the threat
and the terrain, routes should be selected which provide reliable communications whenever feasible.
(1) Approaches. Tactical instrument flight approaches will vary according to the area where the approach is to be performed. In rear areas where standard instrument flight procedures may be followed, ground-controlled approach (GCA) radar can be used for instrument approaches. Approaches in forward battle areas will be limited to using nondirectional beacons. The altitude to which descent can be made will depend on factors such as crew proficiency, aircraft instrumentation, approach NAVAIDs, terrain, and visibility. The ultimate goal of an approach is to allow the aircraft to descend through restrictive weather conditions to an altitude where conditions exist for mission accomplishment. Tactical instrument flight approaches may be classified according to facilities as follows:
(a) Class I-Approach using GCA or a
derivative of the national microwave landing system (MLS) with its DME. Guidance to 100 feet above ground level (AGL) is reliable for property trained aviators in appropriately instrumented aircraft and air traffic management personnel trained in installation and operation of the equipment.
(b) Class II-Approach using one of the following: An ILS or an NDS. Centeriine guidance is reliable with a positive position indication (fix) prior to start of letdown. Descent to 200 feet AGL is allowed for property trained air traffic management personnel and aviators using appropriately instrumented helicopters. Visibility must be such that aviators Can proceed visually following the approach.
(c) Class III-Approach using frequency. modulated homer. Reliability of directional guidance and station-passage indication close to station is
questionable. Descent allilude is
dependent on terrain and visibility conditions must be such that aviators can operate visually before touching
Table 21-1
down or continuing the mission. Aviators and air traffic management personnel must be highly proficient.
(2) Navigational aids. Because of the threat in forward areas of the battlefield, it will not be possible to operate NAVAIDs full time. Operating nondirectionai beacons and surveillance radar NAVAIOs full time would risk enemy acquisition of both the NAVAl D and the aircraft as targets. It would also risk enemy acquisition of the enemy disrupting the mission by jamming the NAVAID signal. In rear areas where more sophisticated NAVAIDs can be used along with standard IFR, efforts should also be made to limit the signal transmission time to only those times when needed as an aid. In the forward battle areas, radio beacons should be operated in the low power mode and turned on intermittently or only upon request. This procedure lessens the chance of enemy detection.
(a) Portable radio beacon sets ANI TRN-30(V)1 and AN/TRN-30M2 are currently used by field units. They transmit a radio signal that can be used in conjunction with the ADF sets ANI ARN-59 and ANI ARN~3 installed in most Army helicopters. These sets provide an amplitude modulated radio frequency signal on anyone of the 964 channels in the frequency range from 200 kilohertz to 535.5 kilohertz and 1605 kilohertz to 1750.5 kilohertz in tunable increments of 500 hertz. The beacon can be operated in either of three mOdes-pathfinder, tactical, or semi- fixed. The range of the beacon depends upon the wattage and configuration of its operation. The capabilities of the radio beacon for each mode of operation are shown in table 21-1.
(b) Frequency modulated homing can be used for short distances as an emergency tactical instrument navigational aid when the onboard AOF equipment malfunctions or the gròund- based nondirectional beacon becomes unreliable or inoperative. Frequency modulated homing should be used only
RadkÞ beacon capabilities
Mode of Ooeraoon Capabilities
Pathfinder Mode (V 1) Tactical Mode {V2' Semi-fixed Mode .
1605-1750.5 kHz - 30 ft. Frequency Range 200-535.5 kHz - Antenna 200-535 kHz 200-535 kHz
1605-1750.5 kHz -
15 ft. Antenna
Range (km) Below 15 km w/15 h. Masl Antenna 500 ft AHO
Range (km) Above 28 km w/15 ft. Antenna 93 km w/60 ft 185 km w/60 ft 500 ft AHO 46 km w/30 ft. Mas1 Antenna Mast Antenna Mast Antenna
Power ÛlJlDut 28W 60W 1 BOW
Weioht 391bs. 1751bs 1751bs
Channels 964 672 672
Power Source SA 4840/U 24 VDC E~rnal Source External Source External Source 28 :t4 VDC 2B :t' VDC 2B :t' VDC
15 DECEMBER 1984 UPDATE .FM 1-240 205

as backup NAVAID to return the aircraft to VMC or to a rear area.
(c) Tactical instrument flight at night is
conducted primarily in the same manner as it is conducted in the day. However, during the transition from tactical instrument flight to visual flight at the point of letdown, a light source must be present to provide a visual reference point landing. The lighted "T," "Y," or reference symbol may be used. If the landing site is located at a location other than the letdown point, a second light source to assist in landing is also
necessary.
Section II Tactical Instrument Flight Planning
, 21-7. Initial planning , The situation requiring an aviation
support mission to be flown using tactical instrument procedures will be most demanding, To perform this mission
i while minimizing the exposure of the i aircraft to Threat weapons and I avoidance of terrain features and ,
obstacles, the mission must be pianned : in great detail and the flight maneuvers ! must be very precise. This section I discusses the planning considerations , and explains the procedures for : determining the MEA, takeoff and climb
requirements, tactical instrument i approach, holding pattern, missed
approach procedures, and emergency procedures for tactical instrument flight.
, 21~. Preflight planning , Prior to actual weather conditions
requiring tectical instrument flight, the aviator should have completed a portion
of the preflight planning procedure. When the mission is received, an additional leg or legs can be added to thepreplanned route. By developing preplanned routes, the time required to complete the preflight planning is
reduced and less time is required to
respond to a mission request. 8. Because electronic emission of
radio beacons can be easily located by the enemy, they will operate at specified
times or as needed and will be frequently relocated. Each time they are moved, the aviator should construct new tactical instrument preplanned routes.
b. There is no existing document that provides information as to the location, frequency, or date-time group for relocation of the radio beacon. It is
proposed that this information be contained in the Communications- Electronics Operation Instructions (CEOI).
c. Although it is the responsibility of the aviator to compute the information required for tactical instrument flight, flight operations personnel should routinely develop tactical instrument preplanned maps. These maps should
206
be available upon being assigned an aviation support mission.
d. When planning for a mission requiring tactical instrument flight, use a
checklist to ensure completeness, The following factors are essential preflight planning considerations:
(1) Mission requirements. When the
mission to conduct a tactical instrument flight is recaived, the aviator can finalize the premission planning that has already been performed. The following factors should be identified in the mission
request: (a) What The nature of the aviation
support mission such as medical evacuation or resupply must be identified. Also, the number or weight of materials to be transported must be known.
(b) Where, The location of the pickup
and dropoff point must be identified. This information is required to determine the enroute course to the dropoff point and to compute the enroute time and fuel requirement.
(c) When. Once it is known when the mission is to be performed, you can use the backward planning sequence to determine the takeoff time and when NAVAIDs should be turned on.
(d) Who. The unit being supported must be known. Coordination is required
to ensure the success of the mission. (2) Enemy situation. The aviator
should know the location and posture of friendly and ene,\,y forces. (To gain this
information, study the unit's tactical map or contact the supported unit for detailed information concerning the tactical situation.)
(3) Threat air defense weapons, It is
important that unit operations personnel obtain all available information which identifies the location of enemy air defense weapons. These locations should be piotted on the tactical situation
map for review by the aircrews. Intelligence information on the enemy's tactical air capability must also be made available. Based on the Threat and route of flight, consideration should be given to requesting suppression of Threat weapons.
(4) Friendly air defense weapons. It is
also important that unit operations personnel obtain-the locations of friendly
air defense weapons and that these locations are plotted on the tactical situation map for review by the aircrews. Whenever possible, flying routes should be avoided over or near friendly AD unit
locations to minimize possibility of friendly AD engagement. When it is not possible to avoid flying such routes, coordination as to flight routes and times must be made between the aviation element and the Army air defense element located at the division airspace
management element, G3, In either
case, coordination must be made with
the DAME to ensure that areas
15 DECEMBER 1984 UPDATE. FM 1-240
coincident with AD weapon locations have not been declared restricted flight
areas. (5) Weather. An in-depth weather
briefing is desirable in determining
mission feasibility. Enroute weather and destination weather at all intended points of landing should be acquired, Pilot
reports (PI REPs) are helpful when available. The US Air Force weather service provides a valuable source of weather information, especially in
forecasting area trends and changes. Whenever possible, contact should be attempted with destination units to
further enhance the accuracy of overall weather factors for the proposed
mission. (6) Communications. The frequencies
and call signs of the supported unit, ATC facility and artillery units must be known. A current CEO I should be available and the aviators must be knowledgeable
concerning its use. (7) NAVAIDs, Aviators should know the
location of the radio beacon, its
frequency, and when and where it will be relocated. Other information includes the FM radio frequency of the personnel operating the beacon and any known "dead spots" created by terrain features.
(8) Special equipment. The mission to be performed will dictate what special
equipment will be carried aboard the aircraft, such as litter, tiedowns, or night vision goggles, Survival equipment should be carried aboard the aircraft.
21-9, The course line As the information becomes available, location of NAVAIDs and the supported units should be plotted on a tactical map, An analysis of this information will allow the aviator to select a route to his
destination that will minimize the vulnerability of the aircraft to Threat weapons and obstructions, Ideally, he would select a route that would mask the aircraft frol11 Threat weapons. However, the terrain features that mask the aircraft may require the minimum enroute altitude to be so high that the aircraft can be detected by electronic devices. To ensure that all factors are considered when selecting the tactical airway, the following guidelines are provided:
a. The availability of radio beacons and where they are positioned is a factor in route following. In some situations, there may be only one beacon available. Because the reliable reception distance of the beacon signai is approximately 15
kilometers, it may be necessary to use dead-reckoning navigation during some portion of the route, Even when two or more radio beacons are available, they
may be so far apart that a segment of the route must be conducted using dead reckoning (fig 21-2), To avoid the danger of exceeding the limits of the safety zone, the dead-reckoning segment of the
route should not exceed 15 kilometers.

remain clear of both the threat and terrain obstacles.
21-6. Flight routes Flight routes will be determined by the availability of NAVAIOs. The threat, terrain, weather, and availability of radio beacons all affect route selection. Considerations for each factor essential in establishing tactical instrument flight
routes include the following:
a. Straight-line flight between takeoff point and destination will be preciuded in
many instances by both the terrain and the enemy air defense threat. In
selecting the flight route, the aviator must carefully analyze the threat as it
affects potential flight routes. I n most instances, the threat will be the overriding factor in selecting flight routes. The aviator should make a thorough map reconnaissance of the possible route to the destination and return to determine the best route which will provide threat avoidance and terrain obstacle clearance. In tactical instrument flight,
terrain obstacles can serve as valuable assets to deny enemy electronic detection just as they are used for concealment and masking during visual terrain flying in forward areas of the battlefield.
b. The availability and location of navigational aids are signfficant factors in
route selection. Regardless of what the weather condition may be, the aviator should know the location and availability of the NAVAl Os within his area of operation. NAVAIDs in the rear area will be more widely spaced because the radio signpl range can be received at a
greater range due to the higher alii tude where the aircraft is flown in this area. NAVAIOs must be placed closer together in the forward area due to the limited
range where the radio signal can be received at low altitudes. Route selection in the forward area will be restricted because of the reduced range of the beacons and limited number of beacons. To increase the unit's capability to conduct tactical instrument flight, NAVAIOs must be mobile and highly
responsive. Routinely, they must be capable of rapid displacement on short notice.
c. The enemy will deploy highly sophisticated electronic warfare systems. Defeating this capability and protecting aviation assets will require maximum tactical ingenuity and resourcefulness. One of the most effective tactics will be to keep radio communications to a
minimum. In selecting a route, communications security and a capability for maintaining communications should be prime considerations. Using terrain to mask the aircraft from possible acquisition by the enemy, early warning radar may aiso mask the aircraft from NAVAIOs and from communications with friendly units. Considering aiso the threat
and the terrain, routes should be selected which provide reliable communications whenever feasible.
(1) Approaches. Tactical instrument fiight approaches will vary according to the area where the approach is to be performed. In rear areas where standard instrument flight procedures may be followed, ground-controlled approach (GCA) radar can be used for instrument
approaches. Approaches in forward battle areas will be limited to using
non directional beacons. The altitude to which descent can be made will depend
on factors such as crew proficiency, aircraft instrumentation, approach NAVAIDs, terrain, and visibility. The uitimate goal of an approach is to allow the aircraft to descend through restrictive weather conditions to an altitude where conditions exist for misston
accomplishment. Tactical instrument flight approaches may be classified according to facilities as follows:
(a) Class I-Approach using GCA or a
derivative of the national microwave landing system (MLS) with its OME. Guidance to 1 00 feet above ground level (AGL) is reliable for property trained aviators in appropriately Instrumented aircraft and air traffic management personnel trained in installation and operation of the equipment.
(b) Class II-Approach using one of the following: An ILS or an NOB. Centerline guidance is reliable with a
positive position indication (fIX) prior to start of letdown. Descent to 200 feet AG L is allowed for properly trained air traffic management personnel and aviators using appropriately instrumented helicopters. Visibility must be such that aviators can proceed visually following the approach.
(c) Class III-Approach using
frequency-modulated homer. Reliability of directional guidance and station-passage Indication close to station is
questionable. Descent altitude is
dependent on terrain and visibility
conditions must be such that aviators can operate visually before touching
down or continuing the mission. Aviators and air traffic management personnel must be highly proficient.
(2) Navigational aids. Because of the threat in forward areas of the battlefield, it will not be possible to operate NAVAl Os full time. Operating nondirectional beacons and surveillance radar NAVAIOs full time would risk enemy acquisition of both the NAVAIO and the aircraft as targets. It would also risk enemy acquisition of the enemy disrupting the mission by jamming the NAVAID signal. In rear areas where more sophisticated NAVAl Os can be used along with standard IFR, efforts should also be made to limit the signal transmission time to only those times when needed as an aid. In the forward battie areas, radio beacons should be operated in the low power mode and turned on intermittently or only upon request. This procedure lessens the chance of enemy detection.
(a) Portable radio beacon sets ANI TRN-30(V)1 and AN/TRN-30(V]2 are currently used by field units. They transmit a radio signal that can be used in conjunction with the ADF sets ANI ARN-59 and ANI ARN-63 installed in
most Army helicoptens. These sets provide an amplitude modulated radio frequency signal on anyone of the 964 channels in the frequency range from 200 kilohertz to 535.5 kilohertz and 160f kiiohertz to 1750.5 kilohertz in tunable increments of SOO hertz. The beacon car be operated in either of three modes-pathfinder, tactical, or semi- fixed. The range of the beacon depends upon the wattage and configuration of it:
operation. The capabilities of the radio beacon for each mode of oparation are shown in table 21-1.
(b) Frequency modulated homing can be used for short distances as an emergency tactical instrument navigational aid when the onboard AOF equipment malfunctions or the ground- based nondirectional beacon becomes unreliable or inoperative. Frequency modulated homing should be used only
Table 21-1 Radio beacon C8D8bRities
Mode of DDBration Capabilities
Pathfinder Mode (V ,) Tactical Mode (V 9) Semi-lixed Mode
Frequency Range 1605,-1750,5 kHz - 30 ft. 200-535 kHz 200-535 kHz 200-535.5 kHz - Antenna
1605-1750.5 kHz -
15 ft. Antenna
Range (km) Below 15 km w/15 h. Mast Antenna 500 ft AHO
Range (km) Above 28 km w/15 ft. Antenna 93 km w/60 fI. 185 km w/60 fI. 500 ft AHO 46 km w/30 fl.. Mest An1enna Mast Antenna Mast Antenna
Power OutDul 2SW SOW 180W
WeÎL'Jhl 391bs. 1751bs 1751bs
Channels 984 672 672
Power SourC43 SA 4B40/U 24 VDC External Source External Source External Source 28 :t4 VDC 28 :1::4 VDC 28 :t' VOC
15 DECEMBER 1984 UPDATE oFM 1-240 20

as backup NAVAID to raturn the aircraft
to VMC or to a rear area. (c) Tactical instrument flight at night is
conducted primarily in the same manner as it is conducted in the day. However, during the transition from tactical instrument flight to visual flight at the point of ietdown, a light source must be
present to provide a visual reference point landing. The lighted "T," "Y," or reference symbol may be used. If the landing site is located at a location other than the letdown point, a second light
source to assist in landing is also
necessary .
Section II Tactical Instrument Flight Planning
21-7. Initial planning The situation requiring an aviation support mission to be flown using tactical instrument procedures will be most demanding. To pertorm this mission while minimizing the exposure of the aircraft to Threat weapons and avoidance of terrain features and obstacies, the mission must be planned in great detail and the flight maneuvers must be very precise. This section discusses the planning considerations and explains the procedures for
I determining the MEA, takeoff and climb
requirements, tactical instrument approach, holding pattern, missed approach procedures, and emergency procedures for tactical instrument flight
21-8. Preflight planning Prior to actual weather conditions requiring tActical instrument flight, the aviator should have completed a portion
of the preflight planning procedure. When the mission is received, an additional leg or legs can be added to the preplanned route. By developing preplanned routes. the time required to complete the preflight planning is
reduced and less time is required to
respond to a mission request. a. Because electronic emission of
radio beacons can be easily located by the enemy, they will operate at specified times or as needed and will be frequently relocated. Each time they are moved, the aviator should construct new tactical instrument preplanned routes.
b. There is no existing document that provides information as to the location, frequency, or date-time group for relocation of the radio beacon. It is
proposed that this information be contained in the Communications- Electronics Operation Instructions (CEDI).
c. Although it is the responsibility of the aviator to compute the information required for tactical instrument flight, flight operations personnel should routinely develop tactical instrument preplanned maps. These maps should
206
be available upon being assigned an aviation support mission.
d When planning for a mission requiring tactical instrument flight, use a
checklist to ensure completeness. The following factors are essential preflight planning considerations:
(1) Mission requirements. When the mission to conduct a tactical instrument flight is received, the aviator can finalize the premission planning that has already
been pertormed. The following factors should be identified in the mission request:
(a) What The nature of the aviation
support mission such as medical
evacuation or resupply must be identified. Also, the number or weight of materials to be transported must be known.
(b) Where. The location of the pickup
and dropoff point must be identified. This information is required to determine the
enroute course to the dropoff point and to compute the enroute time and fuel requirement.
(c) When. Once it is known when the mission is to be performed, you can use the backward planning sequence to
determine the takeoff time and when NAVAl Os should be turned on.
(d) Who. The unit being supported
must be known. Coordination is required to ensure the success of the mission.
(2) Enemy situation The aviator should know the location and posture of friendly and enemy forces. (To gain this
information, study the unit's tactical map or contact the supported unit for detailed information concerning the tactical situation.)
(3) Threat air defense weapons. It is
important that unit operations personnel obtain all available information which identifies the location of enemy air defense weapons. These locations should be piotted on the tactical situation
map for review by the aircrews. Intelligence information on the enemy's tactical air capability must also be made available. Based on the Threat and route of flight, consideration should be given to requesting suppression of Threat weapons.
(4) Friendiy air defense weapons. It is
also important that unit operations personnel obtain the locations of friendly air defense weapons and that these locations are plotted on the tactical situation map for review by the aircrews. Whenever possible, flying routes should be avoided over or near friendly AD unit
locations to minimize possibility of friendly AD engagement When it is not possible to avoid flying such routes, coordination as to flight routes and times must be made between the aviation element and the Army air defense element located at the division airspace
management element, G3. In either
case, coordination must be made with
Jhe DAMEto..ensurethat areas
15 DECEMBER 1984 UPDATE. FM 1-240
coincident with AD weapon locations have not been declared restricted flight
areas. (5) Weather. An in-depth weather
briefing is desirable in determining
mission feasibility. Enroute weather and destination weather at all intended points of landing should be acquired. Pilot
reports (PI REPs) are helpful when available. The US Air Force weather service provides a vaiuable source of weather information, especialiy in
forecasting area trends and changes. Whenever possible, contact should be attempted with destination units to
further enhance the accuracy of overall weather factors for the proposed mission.
(6) Communications. The frequencies and call signs of the supported unit, ATC facility and artillery units must be known. A current CEDI should be available and the aviators must be knowledgeable concerning its use.
(7) NAVAlDs. Aviators should know the location of the radio beacon, its
frequency, and when and where it will be relocated. Other information includes the FM radio frequency of the personnel operating the beacon and any known "dead spots" created by terrain features.
(8) Special equipment. The mission to be performed will dictate what special
equipment will be carried aboard the aircraft, such as litter, tied owns, or night vision goggles. Survival equipment should be carried aboard the aircraft
21-9. The course line As the information becomes available, location of NAVAl Os and the supported units should be plotted on a tactical map. An analysis of this information will allow the aviator to select a route to his
destination that will minimize the vulnerability of the aircraft to Threat weapons and obstructions. Ideally, he would select a route that would mask the aircraft from Threat weapons. However, the terrain features that mask the aircraft may require the minimum enroute altitude to be so high that the aircraft can be detected by electronic devices. To ensure that all factors are considered when selecting the tactical airway, the following guidelines are provided:
a. The availability of radio beacons and where they are positioned is a factor in route following. In some situations, there may be only one beacon available. Because the reliable reception distance of the beacon signal is approximately 15 kilometers, it may be necessary to use dead-reckoning navigation during some portion of the route. Even when two or more radio beacons are available, they
may be so far apart that a segment of the route must be conducted using dead reckoning (fig 21-2). To avoid the danger of exceeding the limits of the safety
zone, the dead-reckoning segment of the
route should not exceed 15 kilometers.

Using this criteria, it would be possible to navigate 60 kilometers using one radio beacon before receiving the signal from a second beacon along the course line (fig 21-2, number 1). If the beacon is
located at the beginning or end of the enroute course, the maximum safe distance the aviator could navigate using dead reckoning and radio navigation would be 30 kilometers (fig 21-2, number 2). Before final selection of the tactical airway is made, the terrain should be studied within the enroute safety zone to determine the MEA. After determining the MEA for each leg of the route, the aviator may find the MEA subjects the aircraft to detection by Threat weapons. To avoid this danger, another route should be selected that would permit the aviator to fly at a lower MEA. After it has been determined that the selected route providas the bast protection from Threat weapons and terrain obstacles, the azimuth and distance of each leg should be measured. The grid course of each leg must be converted to magnetic course. Also, when conducting dead. reckoning navigation, correction for wind drift and instrument error must be applied to ensure accurate navigation.
b. After determining the magnetic course and distance of each leg, draw a
(' @
(8090
15
I 15
TAKEOFF
'\ 15 @ 15
L I 15
\.
tactical instrument map depicting the route that has been selected in the miscellaneous data block on the back of the DA Form 2283 (Army Aviation Instrument Flight Log). The route should be oriented in relation to the actual route planned. Grid course must be converted to magneUc course.
c. The exact scale of the map is not critical. The distance (kilometers) of each leg and magnetic course should be recorded on the map (fig 21-3). If a
portion 01 the lag is conducted using
dead.reckoning navigation, the point where radio reception can be anticipated should be marked. Because the enroute altitude is normally below 1,000 feet AG L, surface winds should be used lor computing enroute time and wind correction. This information should be recorded on the flight log (fig 21-4). (If the diagram is too small for sufficient detail to be included, a separate 5- by 8. inch sheet of paper may be used.) If the leg is flown using both radio and dead- reckoning navigation, the aviator should compute the time for each portion of the leg separately. After completing preflight planning, the minimum enroute altitude for each leg 01 the route can then be added.
CD 60 KM ^
@ ". @ ,".0,''''
270 :!i#tjii* 090
.:::~::::~:::;.,
@ DEAD-RECKONING NAVIGATION
@ RADIO NAVIGATION
0090 TAK EOFF
~ 12
Figure 21-2. Enroute navigation
850
\..:::.:.."16151 @~f~t} 720
Figure 21-3. Tactical Instrument map
15 DECEMBER 1984 UPDATE. FM 1-240
-."'-''''''--- ~ .._..:::::.::.~-~o'" -
..- ,~., "ÞJDD/o -- ..
.n' - -
~ "~- s
- =
. -
"
-
..~ " "
"/ ... ." .. ~T"II.T 0" " .. .. -y .s. ONU. "" "
flllDDI' ~ "
'Y u. .. u, .. STAInOf' ... ~ .
'Y u. PfZ 1.1'& "" ..
....
Figure 21-4. Flight log
21-10. Minimum enroute altitude Due to the low altitude the aviator will be flying when conducting tactical instrument flight, it is essential to perform a thorough map analysis to determine the highest obstacle within the safety zone bordering the course line. Failure to recognize the highest obstruction could result in the aircraft being flown at an altitude below an obstruction within the
v
@ 30 KM
;'1):::::>':::::" 270 .'.' .:.:.
~~\~~~.~~~~~~: L:ANDING
)
f 13
~::1:~.~.51 090 ::~I?
lANDING
20;

emoute safety zone, thus creating an unsafe condition of flight. In addition to the information contained on the map, the aviator should consider any PIREPs of man-made features that have been consfructed since the map was printed. Although obstruction clearance is of
primary concern, consideration must also be given to avoid detection by enemy electronic devices. The aviator may find
that if the aircraft is flown at the MEA, it
would be detected by Threat weapons. When this condition exists, the aviator should select another route where the MEA is lower. The aviator should always remember to fly at the lowest MEA possible. This means that each leg of the route may be flown at a different altitude. The following procedures describe the method for determining the MEA:
a. The MEA for each ieg of a tactical instrument airway may be different. To determine the MEA for each leg of the route, consider one or more of the following safety zones: takeoff, emoute, or approach. For exampie, the MEA for
the first leg is determined by the highest
obstructions within the takeoff safety
zone and the emoute safety zone (fig
21-5). If the route has three or more .
legs, the MEA for the leg(s), other than the takeoff and landing leg, is
determined by the highest obstacle within the emoute safety zone (fig 21-5). the MEA for the final leg is determined by the highest obstacle within the emoute safety zone and the approach safety zone. For the purpose of the discussion in this paragraph, it will be assumed that the highest obstacle within the takeoff and approach safety zone is
lower than the emoute safety zone.
b. The method of navigation that is
used to maneuver the aircraft along the tactical airway (radio navigation or dead- reckoning navigation) will determine the procedure for computing the width of the
safety zone. The following criteria will be used for determining the safety zone for
each type of navigation:
(1) Radio navigation. Radio navigation is within 15 kilometers of a radio beacon.
'l-~# "-/ /
"
0- ') , ,
V I~ 12 13 N~ fIVAOUl"f S~ft.''< 1.0 '<-",
"1: '"
Figure 21-5. Factors for determining MEA
The width of the safety zone should be 2
kilometers wide at the beacon (1 kilometer each side of the beacon) and graduaily broaden to a point equal to one-fifth the distance of the leg at 15
kilometers from the beacon. In the case of a leg with two beacons, the point is
one-fifth of the total distance at the midpoint. If a fraction of a kilometer results, the whole kilometer is used (fig
21-6). The boundary line is drawn on each side of the course leg from a point 1 kilometer abeam the beacon to a point 3 kilometers from the centerline of the
course at the midpoint (fig 21-6).
EXAMPLE: The tactical mission requires
the aviator to perform an aviation support mission during IMC. The route consists of two legs fixed by three radio
beacons. Radio navigation is possible for the entire route. To determine the safety
zone for each leg, the aviator should first
measure the total distance of each leg.
The widest part of the safety zone is
one-fifth the total distance or 6
kilometers for each leg in the example.
IJ,PPROA,CH S4F
~O!::...E fry
~/':.\iii;..Îl;; ~i!w\ I ;:r '5 ---:':":'::':::----1:1 ~
3KM /--../ -
3KM
Figure 21-6. Safety zone for radio navigation
208 15 DECEMBER 1984 UPDATE. FM 1-240
.

(2) Dead-reckoning navigation. Dead- reckoning is used lor the portion 01 the leg that is more than 15 kilometers lrom a beacon and should not exceed 15 kilometers in length. The width 01 the salely zone shall be one-fifth the length of the course leg. If a fraction of a
kilometer results, the aviator should round up to the whole kilometer (fig 21-7.)
EXAMPLE: The tactical situation requires that the aviator perform an aviation support mission during IMC. The route requires that the initial portion of the flight be flown using dead-reckoning
navigation. To determine the safely zone for this portion of the leg, the aviator must first measure the total distance of the leg (30 kilometers). The width of the safely zone is one-fifth the total distance of the leg or 6 kilometers. Draw the boundary line 3 kilometers on each side of the centertine for that portion of the leg flown using dead-reckoning navigation.
(3) Radio and dead-reckoning navigalion. When Ihe course leg is flown using both radio navigation and dead- reckoning, the length of the leg should not exceed a total of 30 kilometers. The wid1h of the safely zone should be 2
kilometers at the beacon (1 kilometers each side of the beacon) and gradually broaden to a point equal to one-fifth the total distance of the leg at 15 kilometers from the beacon. Then maintain that wid1h for the length of the dead- reckoning leg.
c. When the enroute course changes more than 45 degrees, the aircraft can be flown outside the enroute safely zone during the turn. To ensure obstacle clearance, a turn safely zone should be constructed on the side of the enroute course where the turning radius of the aircraft would extend outside the enroute safely zone. The turning safely zone should be 3 kilometers wide and extend 3 kilometers beyond the radio beacon or fix where the turn will be performed (fig 21-7). Taper the safely zone as shown in figure 21-8.
t 3KM
~90- T AICEOFF t J2
3KM
~
. LANDING
I
I .)0
'- I~ "-1-,,-
'-
Figure 21-7. Safety zone for dead-reckoning navigation and turning
Dr-lme from OU18lde
8dge of 3K tQlJI'" 10
81IW11V'..midpoi"t
Figure 21-8. Safety zones for radio navigation segment and enroute turn (greater than 45 degrees)
t5 DECEMBER 1984 UPDATE. FM 1-240 20'

EXAMPLE: The tactical situation requires that the aviator perform an aviation supporf mission during IMC. The route requires that each leg of the route be formed using both dead-reckoning and radio navigation. To determine the safety zone for the portion of each leg flown using dead-reckoning navigation, the aviator should follow the procedures described in the dead-reckoning navigation exam pie. To determine the limits of the safety zone for the portion of each leg flown using radio navigation, a
line has to be drawn from the safety
zone boundary limits where dead- reckoning navigation ends or begins to the safety boundary limits at the beacon (fig 21-9).
CAUTION: The indicated airspeed for enroute travel shouid not exceed 90 knots. Airspeeds greater than 90 knots may cause the aircraft to be flown outside the safety zones. Also, difficulty
will be experienced when decelerating the aircraft to 60 knots during the
approach.
TAKEOFF
d. After determining the boundary of the safety zone for each leg of the route, construct the boundary for the takeoff and landing safety zone. The procedure
for determining the takeoff and landing
safety zone will be discussed in the following paragraphs. For the purpose of this discussion, it may be assumed that the highest obstruction is located within the enroute safety zones. The aviator should study the area within the safety
zone and identify the aititude of the highest terrain or obstruction. Once the highest altitude is located, then 400 feet is added to the figure. This altitude is the recommended MEA for tactical instrument flight.
NOTE: The recommended safe minimum
clearance altitude of 400 feet above the highest obstacle (AHO) incorporates a
safety margin for the variables of altimeter error, pilot error, obstacle elevations, and height of vegetation not depicted on tactical maps. At 200 feet AHO, the lowest beacon reliable reception altitude, the safety margin for
the variables is not adequate. Altimeter
error, variation in obstacle elevation, and heights of vegetation may be greater than 100 feet. Flights at 300 feet AHO would be satisfactory without considering potential pilot error. To allow for pilot
error, an additional 100 feet is added as a safety margin, making the
recommended safe minimum clearance altitude 400 feet AHO. Depending on the
type of terrain-flat desert, broken
woodlands, or mountainous-the safe minimum clearance altitude for flight
planning purposes can and should be adjusted commensurate with the threat and terrain. For example, the safety margin can be reduced over flat desert terrain since vegetation or man. made obstacles are usually absent. In
mountainous terrain, the margin may need to be increased to provide for downdrafts and unexpectedly high terrain obstacles.
MEA = HIGHEST OBSTRUCTION IN SAFETY ZONE + 400 FEET
~ SAFETY BOUNDARY LIMITS
Figure 21-9. Safety zone for dead-reckoning and radio navigation
210 15 DECEMBER 1 964 UPDATE. FM 1-240

EXAMPLE (fig 21-10): The tactical situation requires that the aviator perform an aviation support mission during IMC. After constructing the safely zones for each leg of the route and the takeoff and landing safely zone, the aviator identifies the altitude of the highest obstruction on the first leg to be 450 feet, 320 feet for the second leg, and 500 feet for the third ieg. The MEA for the first leg is
determined to be 850 feet AGL, 720 feet AGL for the second leg, and 900 feet AGL for the third leg (fig 21-10).
NOTE: Obstructions shown on the map identify the height of the obstruction above the ground. To determine the altitude of the òbstruction, the height of obstruction must be added to the terrain elevation.
21-11. Takeoff planning Planning for the takeoff should include all the factors for a normal VMC takeoff such as wind direction and velocily, longest axis of the area, barriers on the takeoff path, or power requirements. In
addition, since the takeoff may be in
actual weather conditions, the terrain within the takeoff safely zone must be evaluated to ensure the climb
performance of the aircraft will allow the aviator to climb to an altitude above the obstacle before reaching it. When possible, the takeoff direction should be planned to be on or near the heading of the firstleg of the course. Because this
cannot always be accomplished, procedures have been established which will allow the aviator to maneuver the aircraft safely to the desired course. If
there is a navigational aid at the takeoff point, standard tracking procedures can be used to establish the aircraft on the desired course.
a. When the takeoff heading is within 90 degrees of the enroute course, a
direct turn is made to the enroute course heading after reaching an altitude tOO
feet above the highest obstruction within the takeoff safely zone (fig 21-11).
b. When the takeoff heading is more than 90 degrees from the enroute course heading, a teardrop turn is used to
reverse direction and establish the course heading. After reaching an altitude 1 00 feet AHa within the takeoff safely zone, execute a 210-degree turn (fig 21-11). The turn should be made in the direction of the lowest terrain obstacles. Where terrain obstacles are not a consideration, the turn should be made into the wind. After starting the
turn, the heading is flown in the same length of time as the takeoff heading was flown. After this period of time elapses, the aviator turns to the heading which will allow him to make good the desired course and accelerate to the desired enroute airspeed.
c. When executing any of the tactical instrument takeoff maneuvers, a
maximum takeoff power setting should be used while acceierating to 60 knots. After reaching 100 feet AHa in the takeoff safely zone, an acceleration to 90 knots and a power reduction to 500 feet per minute should be initiated. The initial high rate of climb and slower airspeed is necessary to gain altitude in a short distance. When the takeoff
LEG 1 LEG2 LEG 3
HIGHEST OBSTACLE 450 HIGHEST OBSTACLE 320 HIGHEST OBSTACLE 500 SAFETY MARGIN 400 SAFETY MARGIN 400 SAFETY MARGIN 400
MEA B60 MEA 720 MEA 900
Figure 21-10. The highest obstruction for each leg of the route determines MEA for that leg
TAKEOFF HEAOING LESS THAN 900 DIRECT TURN TO
(' C\OURSE
~(~~-- -- -, - -
--- -:f-'~"''''"' ""''''~ H ~ .~. TAKEOH HEADING MORE THAN 900 TEARDROP 15
'".w::;;\'
TURN TO COURSE
Figure 21-11. -Takeoff to intercept enroute course
15 DECEMBER 1984 UPDATE. FM 1-240 21

heading is more than 90 degrees from the enroute course heading, there is no acceleration to the enroute airspeed until
the Inbound time has lapsed.
d. If the takeof1 heading is aligned with the en route course, a takeof1 safety zone is not required, but a takeof1 climb zone is plotted to ensure obstacle clearance during initial climb to MEA (figs 21-12 and 21-13). In all other cases, both a
takeof1 safety zone and a climb zone to
ensure obstacle clearance must be constructed (fig 21-14).
1-",-1 \~
AKE Ff 8:)0
CLIMB lONE
J<:;;ô>
1 2' I
1 2' I
"
r--DEAD.RECKONING SEGMENT--j
Figure 21-12. Takeoff climb zone, dead.reckoning segment
(1) To develop a takeoff safety zone, the aviator should construct a box 4 x 3
kilometers with the line dividing the maneuvering and non maneuvering sides of the safety zone aligned on the takeoff heading (figs 21-14 and 21-16). The origin of this line is at the takeoff point. The 3 x 3 kilometer box of the takeoff safety zOne will always be located on the turning side. The aviator should draw a
climb safety zone within the takeof1 safety zone.
(2) The climb safety zone should be drawn 30 degrees each side of the takeoff heading and should extend from the takeoff point until intercepting the boundary of the takeoff zone. The aviator should identify the height of the highest man-made or natural obstacles within the climb zone and the distance from the takeoff paint. The difference between the height of the highest obstacie in the climb zone and the elevation of the takeoff point should be plotted on the takeoff óbstruction chart. If the highest obstruction in the climb zone is 790 feet and the elevation of the takeoff point is 490 feet, then there
would be a difference of 300 feet. This difference of 300 feet will be plotted on the takeoff obstruction chart (fig 21-15) at the appropriate distance from the takeoff point. Using the takeoff obstruction chart, the aviator can determine the rate of climb required to clear any obstacle within the climb safety zone.
EXAMPLE: It is determined that there are two obstacles within the climb zone. By plotting these two obstacles on the takeoff obstruction chart, it can be determined that a climb rate of 500 feet per minute is required to clear these obstacles by a safe margin.
e. The aviator should determine the highest terrain feature or obstacle within the takeoff safety zone. This altitude plus 100 feet is the altitude the aviator must climb to before turning to intercept the enroute course.
(1) The aviator locates the altitude of the highest terrain feature or obstacle within the takeoff safety zone and the safety zone for the first enroute leg. The aviator adds 400 feet to the highest
TAKEOFF
5 1 CLIMB ZONE
;;r ~ f
60" 4K
'1 '5 ! -- 3K-
212
C1BSTACLE
NO.1 HILL
NO.2 TOWER
DISTANCE FROM TAKEOFF POINT
1.5 KILOMETERS
2.0 KILOMETERS
ENROUTE COURSE
Figure 21-14. Takeoff climb zone
15 DECEMBER 1984 UPDATE. FM 1-240
ALTITUDE ABOVE TAKEOFF POINT
300 FEET
225 FEET
':::a~:::::::::" ;".. :::::. <-:. ',',' '0::>'..".:.:-::'
....~.:.'.'

~
O4OC w "
.. ~nJ w > 0
'" <""
TOWER
225 FEET
,1/ '^'
-
::~ w w
}
DISTANCE fROM TAKEOFF POINT' Ite:MI
Figure 21-15. Takeoff obstruction chart for a ground speed of 60 knots
TAKEOFF HEADING GREATER THAN 900 FROM COURSE
15
.
5
TAKEOFF HEADING LESS
THAN goo FROM COURSE
"
15
-
5
Figure 21-16. Takeoff safely zone
15 DECEMBER 1984 UPDATE. FM 1-240 2

obstruction within these two safety zones. This is the MEA for the tirst leg of the route and the aircraft must be flown to this altitude while turning to intercept the enroute heading.
(2) The MEA for succeeding legs of the route may be different. To minimize detection, the aviator flies each leg at its MEA rather than the entire route at the altitude of the highest MEA. If the succeeding leg of fhe course is higher, the climb is planned so as to cross the radio beacon at the highest MEA. If the altitude is lower, the aviator descends to the MEA after passing the radio beacon.
(3) (Refer to fig 21-17.) When flying
outbound from beacon A to B, the 500. foot hill boosts MEA to 900 feet MSL. MEA can be reduced to 550 feet by plotting an offset course (030 degrees
outbound from beacon A) to avoid hill.
Initially, on a 030.degree course, the plotted relative bearing to B is 20 degrees (050 minus 030). As the flight progresses outbound, the relative bearing gradually increases until it finally
doubles (40 degrees relative bearing) at
intermediate fix. Since 030 degrees has been maintained outbound from A, cross.tune back and forth to B in order to maintain the outbound track and note the relative bearing increase. When the
angle doubles (40 degrees), the aviator is at the intermediate fix and will turn right to B on a 070.degree course. Distence from A to fix is same es from fix to B. Time enroute from either beacon to fix will be the same in calm wind. By using relative bearing change and
~"'l''' \ ~
doubling the relative bearing angle, the MEA has been reduced while bypassing the 500.foot hill. Doubling the angle technique works only inbound to a
beacon. A left crosswind increases relative beering by the same amount of crab angle. A right crosswind reduces relative bearing by amount of crab angle.
21-12. Approach procedures The tactical instrument approach incorporates the normal flight procedures used for the standard instrument approach. However, the MDA for the tactical approach is lower. There are two types of tactical approaches: the terminal approach and the straight-in approach. The flight maneuvers and procedures for constructing the approach safety zone for the tactical approach are as follows:
DIRECT ROUTE MEA: 900 FT
OFFSET ROUTE MEA: 550 FT
Figure 21-17. Offsetting course to bypass direct route obstacle
214 15 DECEMBER 1984 UPDATE. FM 1-240

a. Terminal approach. The radio
beacon used for the terminal approach is
located at the landing point. There is no finai fix where the descent is iniüated.
The standard 1-minute racetrack pattern is used to maneuver the aircraft into
position for the descent (fig 21-18). Because there is limited space within the
approach safety zone, the aircraft should
be flown at 60 knots airspeed. Reduction in airspeed should be made after completing the outbound turn. Also, the aircraft must be flown to the minimum
maneuver altitude within the approach
safety zone (400 feet above the highest
obstruction within the approach safety zone) prior to iniüating the approach. If
the MEA is higher than the minimum
maneuver aijitude, descend to the lower altitude in the pattern. Upon intercepting
the approach course, the descent is
begun to arrive at the MDA prior to reaching the beacon. The aviator maintains track and MDA until station
passage. The approach safety zone for
the terminal approach provides a safe maneuvering area for entering the
racetrack pattern, holding and missed approach. Following are the procedures for constructing the approach safety .zpne: /( (1) The lateral boundaries of the approach safety zone are 3 kilometers on the maneuvering side and 1 kilometer on the nonmaneuvering side (fig 21-19). The linear boundaries extend 3
kilometers on each side of the beacon. The maneuvering side should be located on the side where the terrain is the
lowest. Where terrain is not a factor, it
should be posiüoned on the upwind side. (2) Study the area within the approach
safety zone and locate the highest
obstruction. The MDA is derived by adding 200 feet to the altitude of the highest obstruction. As discussed previously, the MEA for the final leg of
the course may be determined by the highest obstruction wilhin the approach safety zone. ~3) A diagram of the approach should
be drawn to provide a visualization of the
maneuvers to be performed during the execufion of the approach.
/,,----8-------"', I \
',I- , M'NUTE -I) - '-----------_.,,(/ ~~.
\.' LANDING POINT --8- -
I 4. 3KM ...1.. 3KM
... I
ffè-l. @--=1 \ ,
_:::::_----
Figure 21-18. Terminal approach pattern
'4
3KM
, . /
15
I
.--J APPROACH SAFETY ZONE
lKM
Figure 21-19. Approach safety zone (tsrmlnal approach)
15 DECEMBER 1984 UPDATE oFM 1-240 21,

MDA = HIGHEST OBSTRUCTION WITHIN APPROACH SAFETY ZONE +
200 FEET
EXAMPLE (fig 21-20):
Altitude of highest obstruction within the
approach safety zone. . . .. .. . . .. .. . .
. .
.. . .. .. .. ..
.
.. .. . ..
400 feet (MSL)
Minimum enroute altitude. . . . . . . . . . . . . .
... . . . . . . . . . .
... . . . .1,000 feet (MSL)
Minimum maneuver altitude within
approach safety zone. . . . . . . . . . .
..................... BOO feet (MS~
Minimum descent altitude. . . . .
. .. 600 feet (MSL)
(4) After passing the beacon, a
standard rate turn is made to the outbound heading while simultaneously beginning descent to minimum maneuvering altitude within the approach safety zone. Airspeed is decreased to 60 knots after completing the outbound turn.
MEA. l000MSL
600MSL
216
(5) After 1-minute outbound, the aviator turns to the inbound course. If
the descent to the minimum maneuver aititude for the approach safety zone (BOO) is completed prior to intercepting the final approach course, the aviator continues the approach inbound to the landing point. If additional time is
required for the descent, the pattern is
flown until reaching the minimum maneuver altitude. On subsequent patterns, time outbound is adjusted to achieve a 1-minute inbound leg. Upon intercepting the final course inbound, descent is begun to MDA.
(6) If at any time on the approach visual contact is made with the ground, a
transition is made to VMC flight. If visual contact is not possible, a missed approach procedure is executed upon station passage.
t b. Straight-in approach. To perform a
straight-in approach, the aviator must be able to identify a pOint along the enroute course where the approach begins. This point may be identified by an intersection
.,
APPROACH SAFETY
ZONE ~,= ".,,~, ""'"" I
I,---B---- '\ I I. , MIN ., \
\, . .
I
L .
LAN[\ING -,. ,..'
~400'
aoo MSL
'--MDA600MSL 400MSL , '; - -
.... ,
LANDING VERTICAL VIEW
Figure 21-20. Terminal approach procedures
15 DECEMBER 19B4 UPDATE. FM 1-240

formed by the two magnetic bearings or by passing over an enroute nondirectional beacon (fig 21-21). Normally, there is sufficient distance
between the final fix and the landing
point to permit a standard rate of
descent from the enroute altitude to MDA prior to reaching the landing point.
However, when necessary, the aviator
may enter holding on the inbound course to the fix and descend to the minimum
maneuver altitude within the approach
safety zone. A reduction in airspeed to
60 knots should be made after crossing
the fix. Upon passing the fix, the aviator
IBN=:'. 16151
-.-~
descends to MDA and tracks on the inbound course.
(1) When using a radio beacon or the intersection of magnetic bearings as the
final fix, the following factors must be considered:
(e) The location is determined along
the course where reliable intersection
idenmication can be established. Tarrain
obstructions will limit the range and altitude at which a reliable signal can be
received.
(b) The secondary radio beacon should be no more than 1 0 kilometers
from the intersection. This restriction is
f 14
~ 360
\ILDR .)1<.,
g: ......'
18N=:"~
,.:.:. - t. ~:-090 "':::.:t::.
necessary to ensure accurate intersection identification.
(e) The intersection is located so the magnetic bearings forming the intersection are as close to 90 degrees as possible.
(d) The landing point should be no less than 2 kilometers and no more than 8 kilometers from the final fix.
(2) The approach safety zone for the straight-in approach provides a safe maneuvering area for holding. approach, and missed approach. The lateral
boundaries are 3 kilometers on the maneuvering side and 1 kilometer on the
onmaneuvering side (fig 21-22). The
I PEZ
0~1: LANDING ......,:.'
...-,: ~ Z691
I PEl ~-_-:: lilll ~
/0 ~ ,,1() oo:-'~ "$:."'" v LANDING
\--:..ß::
-~.,
\- 3KM .1
~400T-l- APPROACH SAFETY I .13KM
ZONE
15 DECEMBER 19B4 UPDATE. FM 1-240
Figure 21-22. Approach safety zone (straight-In approach)
15
f 14
FIgure 21-21. Stralght.1n approach
\. 3KM .1
,-
:---172 -.'-=
~~ ~ --'\~ ~ ,~.,.
- ~ ~^..~~ ~,.,,(I"I
~""o~ ~ ~.,. r- I
21

I /---B ----, I FOR HOLDING OR DESCENT} \ TO LOWER AL TITUDE;:Eï::!,: I
-~T~ I
~"--
:~~;!ì~e
VERTICAL VIEW
APPROACH SAFETY ZO~ "I I
MDA 600MSA FIELD ELEVATION
-- 275MSL G'ROUND
SPEED DISTANCE TIME
60K I 3KM I 137
3KM
Figure 21-23. Stralght~ln approach procedure
linear boundaries wili vary depending on offset of the approach leg should not the distance the intersection is from the exceed 30 degrees from the enroute landing point. Regardless of what this course, When the final approach course distance may be, the safety zone wili is offset more than 45 degrees from the extend 3 kilometers in front of the enroute course, a turning safety zone
, intersection to a point 3 kilometers should be constructed as discussed in 
--0 '. .
TERMINAL APPROACH
~ -
LAN biNG -
J 0., I (1_1MIN_1 ~ <@400
',- __-i" I
[APPROACH SAFETY J ZONE
--1---
F- I -
. APPROACH SAFETY
J ZONE
I ,,---- ..... /
\,Q , 1-' MIN-I I\!f'" 400 "
_=.1"
STRAIGHT.IN APPROACH
the aviator should allow sufficient time to fly outbound to achieve a l-minute inbound leg. If abeam position cannot be determined, the aviator starts the time upon rolling out of turn to outbound leg. Wind correction is applied as necessary, both outbound and inbound. The aviator continues flight with holding pattern as required.
21-14. Missed approach procedures a. Weather conditions or the enemy
situation may not állow the aviator to land at his destination after initiating the
approach. When either of these conditions exists, the aviator must execute a missed approach. The requirement to perform a missed approach must be anticipated for every tactical instrument flight. To ensure obstruction clearance for the missed approach, a safe maneuver area is provided for in the approach safety zone. The manewer for the missed approach is basically the same for both the terminal approach and the straight-in approach. It consists of a climbing left turn or right turn to intercept the -reciprocal of the .enroute <:OUfse ~f ,.eturn
600
@j) ~""';:::i;'
~ .
.:::: )
.
0::::' ,
Figure 21-24. Holding pattern
to the radio beacon. if the missed approach procedure is to intercept the reciprocal of the enroute course, the aviator should use a 45-degree or more intercept heading.
b. During the preflight planning, the aviator must determine the direction of
turn. Normally, it is on the same side the holding pattern is flown. HIowever, the aviator is not restricted to this procedure provided he plans a missed approach safety zone (fig 21-25). The location of highest terrain obstructions and wind direction will dictate the direction of turn.
c. A diagram of the planned missed approach should be drawn to provide a
visualization of the maneuver to be performed during the execution of the missed approach.
EXAMPLE (fig 21-25):
Minimum descent altitude. . . . . . 600 MSL Minimum maneuvering altitude. . . . . . . . .
.
.. . . . . . . . . .
.. . .
.. .
.. .. .. .. 800 MSL Minimum enroute altitude. . .. 1,000 MSL
d. Upon reaching the position where the missed approach must be executed,
.
the aviator immediately initiates a
15 DECEMBER 1964 UPDATE .FM 1-240
I-~ I I
"~"G r-o
climbing turn. He continues the turn until
on a direct course to the radio beacon 01
on an intercept heading to reciprocal of .
the enroute course. The climb should be expedited to the minimum enroute aititude. An airspeed of 60 knots should be maintained during the climb.
e. Radio contact should be established with the FCC to advise of th, aviator's intentions. If contact cannot be mede, the aviator should contact the ground unit to relay his request to the ATC personnel.
21-15. Emergency procedures The emergencies that the aviator may experience while conducting tactical instrument flight will vary. The best procedures to cope with the emergency will be determined by the conditions tha exist at the time of the emergency. Goo, judgment and positive action are essential to ensure survival of both the aircraft and aircrew. Although not complete, the following are emergency conditions that might be experienced. Also presented are recommended actions.
21

,::Im::. -li:i!I:::. .:::1iI::. '~:;f!:?:'
~ -y.~~
220
ri I /' I ~ I
I ) I
)L =t 280 .:;:X'.'%::':
-....... ...0,' ."."
,.'.-.. . ,...ø.:, ~...... ~.......... ~. :0.:::. .:...-.".
'.'.'.'.' -
~:::,:::.,
STRAIGHT-IN APPROACH
~600
TERMINAL APPROACH
@600
APPROA -
~ 2g~EsAFEry
\ '
I -
.. I ''''0:;;; <Am, I I ~ ZONE
I /-('\ '\ I ,. A)
-\./ ./ J .~ 0:-
-
..~:.(~. ~ao
Figure 21-25. Missed approach procedure
15 DECEMBER 1984 UPDATE' FM 1-240

a. Air defense emergency procedures. Although visual means of enemy air defense acquisition are degraded during periods of IMC, his electronic capabilities
relain their effectiveness. The route the
aviator flies should minimize vuinerability
to Threat weapons. However, while en
route, the ANI APR-39 radar detector
may activate, indicating the aircraft is
being tracked by enemy radar. Unless immediate action is taken to reduce altitude, the aviator will soon be engaged. To descend below the MEA is
dangerous. However, the aviator must break eiectronic line-of-sight by
descending. To minimize the danger involved, he should decelerate the
aircraft to the minimum controilable
forward airspeed. He should simultaneously initiate a descent. At a
specific altitude, he will lose radar line-of- sight. Descent below this altitude is not
required unless he has flown into VMC. If
he is still in the clouds, he must decide whether to continue to his destination or
reverse course. Primary factors that he must consider include the following:
(1) What are the weather conditions? (2) What is the altitude above the
highest obstruction? (3) In which direction are the lowest
obstructions located? (4) Is the landing point or takeoff point
closer? (5) Are there suppressive
countermeasures available to degrade
the Threat weapons? (6) is there any battle damage to the
aircraft? If so, what effect does it have on continued flight?
b. Loss "f radio navigational aids. While en route to the landing point, the aviator may experience a loss of signal
from the radio beacon. Each situation of
this nature requires good judgment.
General guidance that may be followed is shown below.
(1) If the radio beacon tails when the aviator's pos~ion Is within 15 kiiometers of the beacon, he reduces airspeed to 60 knots and continues on the route for 2 minutes. If the signal is not received w~hin this period of time, he reverses
course and uses dead-reckoning navigation as required to return to the takeoff point.
(2) If the radio beacon fails when he is
beyond the effective range of the radio
beacon, he will not know immediately
that it has failed. If no audio signal is
received upon reaching the time where the radio signal shouid be received, a
course reversal is executed. (3) If the radio beacon fails during the
approach, the approach is continued to
the MDA. However, the aviator does not
continue inbound after reaching the MDA unless visual contact is made with the ground.
(4) If the radio beacon fails while holding, the aviator does not initiate the
approach. Instead, the aviator turns to
the reciprocal of the enroute heading
and returns to the takeoff point.
(5) If in close proximity to the landing point and ground personnel can identify
the aviator's position by sound, the
aviator uses ground personnel to talk
him down. (6) If radio contact can be established
with the operator at the beacon, frequency modulated homing can be used as an emergency means of
navigation. c. Aircraft deficiency. Any number of
aircraft emergencies may occur during a
tactical instrument flight. These
emergencies can be categorized as land immediately, land as soon as possible, or land within a specified time. The first two emergencies are simple go or no-go indications of flight. The third condition
must be evaluated to determine if the
aviator should continue or abort the
mission. Factors that must be evaluated to determine what emergency action should be taken include the following:
(1) Has the aviator reached the point
of no return where it would be closer to
continue on to the intended point of landing?
(2) Can a safe landing be made at the landing point based on the emergency, the nature of the landing area, the load
and the enemy s~uation? (3) If the emergency requires the
aviator to perform a full stop landing
from the approach, even if visual conditions cannot be established, he slows the aircraft to minimum
controllable airspeed and descends at a
slow rate. If visual contact is not established at MDA, the descent is
continued until visual contact is made with the ground.
(4) Can a takeoff be made after landing at a field site? Due to the nature of the emergency, a safe takeoff from a
field s~e may not be possible. However, return flight to the takeoff point can be accomplished.
(5) How critical is the mission? It may be more important to get the cargo to its
destination and let the aircraft remain on the ground at the field site until further flight is possible.
Section III Aviator Training
21-16. Training programs a. Units qualifying aviators in tactical
instrument flight are responsible for conducting a well.organized training
program. The program of instruction (POI) must instill confidence within the
student that tactical instrument flight can be performed safely in a high threat environment and at low altitudes. The student undergoing this training should
be quaiified and proficient in instrument flight. Before conducting the flight portion of the training, the student should
demonstrate knowledge of preflight
15 DECEMBER 1984 UPDATE. FM 1-240
training that is required for instrument flight. Teamwork between the pilot and copilot is essential. Whereas 50 feet to 100 feet above or below assigned
altitude is not critical for normal instrument flight, it is very serious when conducting tactical instrument flight. The copilot should advise the pilot when the aircraft deviates from an assigned altitude or is being flown oil-course. Maintaining precise positioning of the aircraft is essential for tactical instrument flight
b. To acquire the proficiency that is
required to conduct tactical instrument flight, the training must be continuous.
Command emphasis is essential to
ensure that the aviators assigned to the unit achieve and maintain the required
proficiency to conduct tactical instrument flight in an actual combat environment. Where possible, the synthetic flight
training systems (SFTS), in conjunction
with actual in-flight training, should be
used to obtain and maintain the required degree of proficiency.
c. Tactical instrument training flights
conducted during VMC require no unusual precautions. However, when
conducted during actual instrument conditions, the commander must ensure
that- (1) Actual tactical instrument training
flights are conducted in a controlled training environment and only on predetermined routes with all obstacles clearly noted. These routes must be coordinated with local and government air trallic authorities such as the coordination for major training exercises
or local coordination to establish semi- permanent training routes. Authorities must then determine the necessity of publishing the proposed air routes or th<
notification of civil airspace users as necessary.
(2) Actual tactical instrument training
flights are conducted only when destination weather is expected to be a
or greater than, minimum descent altitude at time of arrival plus 1 hour.
(3) Missed approach procedures are coordinated with local airspace authorities to allow immediate transition
to necessary alternate airfields. Alterna airfields should be selected in
accordance with criteria established for
normal IFR flight in AR 95-1.
21-17. Flight training for tactical Instrument flight A recommended program of instructior
for tactical instrument flight is provided
appendix C. This information explains t
tasks, conditions, types of instruction,
references, and the training or evaluati standards.
;

Appendix A
References
Section I
Required Publications
Required publications are sources that users must read in order to understand Of to comply with this
publication.
Army Regulations
AR 95-1 Army Aviation: General Provisions and Flight Regulations
Field Manuals
FM 1-88 Aviator's Recognition Manual
FM 1-230 Meteorology for Army Aviators
: FM 44-30 . Visual Aircraft Recognition
: Other Publications
DOD Flight Information Publications (FLIP) (To order DaD FLIP's, write to Defense Mapping Agency (DMS), USAATCA Aeronautical Services Office, Cameron Station, Alexandria, VA 22314.)
Airman's Information Manual: Basic Flight Information and ATC Procedures
, FAA Advisory Circular (AC) 97-1 .
Runway Visual Range
. FAR, Part 91 i General Operating and Flight Rules
: (To order FAA and FAR publications, , write to Superintendent of
Documents, Government Printing Office, Washington, DC 20402.)
Section II Related Publications
! Aelated publications are merely sources 01 additional I information. Users do no1. have to read them to ! undersand this manual.
i Army Regulations
AR 95-serles , Aviation
AR 310-serles Military Publications
AR 310-25
,
Dictionary of United States Army Terms
222
AR 310-50 Catalog of Abbreviations and Brevity
Codes
Field Manuals
FM 1-103 Airspace Management and Army Air
Traffic in a Combat Zone
FM 1-203 Fundamentals of Flight
FM 1-301 Aeromedical Training for Flight Personnel
Technical Manual
TM 95-226 United States Standard for Terminal Instrument Procedures (TERP)
(To order copies 01 TM 95-226, write to S&I DirectOr, ATTN: CCQ-A5-AI, Cameron Station, ALEX, VA 22134.)
Other Publications
FAA 7110.65 Air Traffic Control
Section III Projected Publications
Projected publications are sources of additional information that BTe scheduled for printing but not yet available.
NOTE: These are publications that are scheduled for printing. After printing, they will be distributed automatically via pinpoint distriblrtion and will not be available for requisition from US Army AG Publications Center, Baltimore. Maryland, until
indexed in DA Pam 310-1.
Field Manual
FM 1-402 Aviator's Recognition Manual
15 DECEMBER 1984 UPDATE. FM 1-240

Appendix B IFR Right Planning
B-1. General Planning for an IFR flight can be a
simple operation requiring 10 minutes or a complex operation requiring many hours. The exlent of planning needed depends on the nature of the mission, the type and number of aircraft on the mission, distance to be flown, selected route, weather conditions, and available navigational facilities. The checklist items
presented in this appendix are for the aviator's general guidance. They are especially applicable to instrument flight planning within the United States. The aviator's proficiency and judgment wiil dictate necessary modifications to these procedures and techniques.
B-2. Planning When a specific mission is assigned, usually the flight is planned so that it
arrives at a fixed destination at a defin~e
time. The type aircraft, the ioad, and the personnel on board are often predetermined by the mission. However, when aviators plan proficiency flights,
usually they can choose aircraft, destination, route, time, and other factors which have a bearing on the flight.
Where possible, the variable factors affecting the mission should be controiled to produce optimum flight
conditions.
B-3. Flight planning checklist a. Weatl1er briefing sources. A
weather briefing can be obtained from the foilowing:
(1) A military or civilian forecaster-in person.
(2) A forecaster-by local telephone. (3) A recorded forecast-by local
telephone. (4) Flight service stations-in person. (5) Flight service stations-by local or
exchange telephone. (6) Military or weather bureau
forecasters-by long-distance collect telephone.
NOTE: Current operational publications
should be checked for procedures and listings.
b. Weather data briefing. The weather briefing should include the following:
(1) A forecast for destination and alternate airfields at estimated time of arrival to include-
(a) Ceiling and visibility. Applicable regulations should be checked for compliance. The destination forecast will determine the requirement for selecting
an alternate. If the minimum conditions specified by AR 95-1 will exist at the destination, an alternate airport is not required.
(b) Weather phenomena producing
low ceilings and visibility. (e) Hazards to flight, such as
thunderstorms, icing, gusty winds, and high density altitude.
(d) Height of cloud tops. (2) An en route forecast to destination
and alternate airfields to include- (a) Hazards to flight. (b) Freezing level. (c) Height of cloud tops and bases. (d) Flight level winds and
temperatures. (3) An overall weather picture. With
the aid of a forecaster, if available, a
clear mental picture of the overall weather situation should be obtained, including locations of frontal systems and high- or low-pressure areas. The rate and direction of their movement and the associated weather conditions should be clearly understood.
c. Aircraft equipment. Check the aircraft logbook or other available source for onboard navigational equipment. Check for any restrictions that might effect the mission (oil samples due, equipment inoperative, and so on).
d. FLIP research. (1) Check appropriate Enroute
Supplement (IFR or VFR) for departure, destination, and alternate if required.
(2) Check availability of fuel at destination and alternate.
(3) Check low alt~ude enroute chart for effective control zone hours.
(4) Check both Class I and II NOTAMs
and the flight information bulletin for information that will affect the flight.
(5) Review SID, published
nonstandard departure procedures and weather minimums, and approach plate
for departure airfield. This information wiil heip in maintaining obstruction clearance during the takeoff and departure phases and will aid in planning an orderly
trans~ion to the enroute phase. (6) Review approach plate for
destination and alternate. Become familiar not only with the approach planned but also other available approaches. Check for outlying IAFs or published feeder routes that may provide
an orderly trans~ion from enroute to approach phases.
e. Route selection. Select the best route based on the following:
(1) Weather conditions. (2) Preferred routes. Check current
operational publications for listings.
Deviate from preferred routes only when safety or the mission requires ~.
Depar1ure information and IAF and feeder route information should also be considered. It is recommended that the closest available IAF or transition fix be planned, since It will normaily be assigned by ATC.
(3) Direct routing. File for direct flight only if the mission requires it or if
considerable savings of fuel or time can
15 DECEMBER 1984 UPDATEoFM 1-240
be realized. If the flight penetrates uncontrolled airspace, air traffic control will not provide traffic separation.
NOTE: When direct routes are planned, there are two basic considerations. FAR 91.119 must be complied with to ensure obstruction clearance, and NAVAID
ranges and restrictions must be researched to ensure reception for the entire leg.
f. Route survey. Conduct a route survey to the destination and alternate airfields, using navigational charts to determine the following:
(1) Primary radio aids for enroute navigation. List frequencies, station identifiers, courses, and radiais on the flight log.
(2) Supplementary radio aids to be used for position fixing and secondary navigation.
(3) Availability of ATC and weather radar enroute.
(4) Distance between reporting points and total flight distance. Total distance i:
computed from takeoff to the destinatior airport via the flight planned route.
(5) MEA, MaCA, MAA, MRA, and MCA.
NOTE: Check NOTAMs and chart revision notices for the latest changes ir
the status of NAVAl Os. Check the listinc of VOR shutdown information for
-
alternate routing where appropriate.
g. Altitude selection. Select the best altitude for the flight based on the following:
(1) Weather conditions. Avoid altitudE
where icing and turbulence will be hazardous.
(2) Direction. Uniess otherwise required to avoid flight hazards or if
requested by ATC, direction of flight in
controlled airspace should be based or the hemispherical rule. Hemispherical
rule application in controlled airspace should consider the overall flight
direction, rather than individual legs th&
may vary from easterly to westerly directions." In uncontrolled airspace. hemispherical rule is MANDATORY for each individual leg.
(a) Odd altitudes apply to magnetic courses from 0 to 179 degrees.
(b) Even alt~udes apply to magnetic courses from 180 to 359 degrees.
(3) MEA, MDCA, MAA, MRA, and MCA.
(a) Seiect altitudes that comply with published minimum altitudes applicablE
to the flight. (b) On direct flights, determine
minimum altitude based on charted obstacles and regulation requirements.
(c) Do not plan a flight at the MEA i
the flight level temperature wili be significantly below standard. Lowering
pressure levels in air significantly cold, , ,

than standard will result in the true altitude being significantly lower than the indicated altitude. Request an altitude assignment above the MEA under these cold air temperature conditions.
(4) Aircraft performance and equipment. In selecting a flight altitude,
cons;der- (a) Optimum operating conditions for
the aircraft. (b) Oxygen availability. (c) Radio equipment limitations (range,
altitude, and so on). (5) Air traffic control. (a) Avoid relatively low altitudes which
may conflict with approach control service in complex terminal areas,
(b) Do not request unnecessary altitude changes.
h. Departure. (1) Plan the departure to comply with
SIDs at airports for which they have been established, since ATC normally will
employ SIDs if they are available. Be
. familiar with all SIDs since the controller may assign one 01her than the one
.
requested. . (2) Check for availability of departure , control (conventional or radar). Note the .
appropriate frequencies. (3) Study the local area chart if one is
published, or study the departure area on the enroute chart. Become familiar with
, the radio facilities and intersections
.
within the departure area. i. Performance planning card (PPC). (1) Consult the operator's manual to
determine the PPC information required,
to include TAS, Vne, cruise power setting, and cruise fuel consumption.
. (2) Corr,~ute and file the TAS
accurately, Recompute the TAS later in flight to verify preflight calculations. If the
i actual TAS varies more than 10 knots
, from the filed TAS, notify ATC of the
: difference.
I NOTE: True airspeeds of a given aircraft i can vary considerabiy depending on , weight, altitude, and desired cruise : condition. Do not guess-consult the aircraft operator's manual.
j. Ground speed. Compute GS for
! each leg of the flight by combining the forecast winds with the planned courses and the TAS.
k. Estimated time enraute (ETE). .
(1) Based on ground speed and distance, compute 1he ETE for each leg
: of the flight between reporting points. (a) On the initial ieg, allow sufficient
additional time for the planned departure and climb to flight altitude.
.
(b) If enroute climbs are made at reduced airspeed, allow additional time
I for significant changes on the leg. , (2) Compute the total ETE for the
flight. This will be the estimated time required enroute from the airport of
. departure to the destination airport
based upon flight plan route.. Remember
224
that ETE is exclusive of the time required for planned enroute delays.
(3) The ETE to the aiternate airfield should include-
(a) Time from the missed approach point to the missed approach holding point to include one circuit in the holding
pattern. (b) Time from the missed approach
holding point to the alternate to include time for approach and landing,
,. Fuel. (1) Compute the fuel-an-board flight
plan entry by subtracting the warmup, takeoff, and taxi fuel allowance (see the aircraft operator's manual) from the total fuel on board. Then divide this quantity by the cruise consumption rate. The cruise consumption rate is determined by the cruise conditions and aircraft gross weight, as explained in the aircraft operator's manual.
(2) Compute the total fuel required for the flight based on the appropriate consumption rate specified in the operator's manual and include allowance for-
(a) Warmup and taxi. (b) Initial climb (consult aircraft
operator's manual for extended climbs). (c) Enroute cruise to destination and
alternate. Allow time in addition to ETE for known enroute delays required by the mission. Enroute ATC delays usually cannot be anticipated. Also allow time for the approach.
(d) Fuel reserves required for IFR flight.
(3) Compute surplus fuel by subtracting total fuel required from total fuel capacity.
NOTE: Surpius fuel is important since enroute traffic delays and holding at the destination are not provided for in the fuel requirements specified in (2)(a)
through (d) above. Reserve fuel is for UNFORESEEN circumstances. Do not plan to use reserves for routine delays.
m. Terminal area. (1) If an area chart is published for the
destination, study it carefully to become familiar with-
(a) Radio facilities and intersections. (b) Published transitions and STARs. (2) Study all of the published
destination approaches which the aircraft is equipped to make. Become familiar
with- (a) Transitions. (b) Final approach courses. (c) Procedure turns. (d) Approach minimums (DH or MDA,
ceiling, and visibility). (e) Restriction, warning, and caution
notes. n. Aircraft clear!,nce form (flight plan).
Army aviators will use a military flight
plan according to 000 FLIP. FAA flight plans may be used in lieu of military forms when departing US installations
15 DECEMBER 1984 UPDATE. FM 1-240
not having a military base operations facility.
o. Flight log. The use of an instrument flight log is recommended. This provides for a concise summary of data required to execute the flight, allows for in-flight revision of data, and provides an accurate record of the flight. The flight log normally is supplemented by reference to the appropriate radio navigation chart.
B--4. Sample plan
a. Initial weather check, (1) Takeoff. (2) Destination and alternate. (3) Enroute. (4) Winds aloft and temperature. (5) Freezing level, thunderstorms, ice,
and turbulence,
b. Preparation. (1) Check aircraft equipment. (2) Check enroute supplement for
departure, destination, and alternate airfields,
(3) Check en route chart for control zone effective hours.
(4) Check NOTAMs-Classes I and II.
c. Planning. (1) Review SID departures and
approach plates, if available, for departure airfield.
(2) Review enroute chart. Consider departures and arrival procedure when determining flight route.
(3) Fill in flight plan information except TAS, time, and distance,
(4) Consult the operator's manual. Compute PPC.
(5) Compute flight log. (6) Complete flight plan entries. (7) Receive weather briefing. (6) File flight plan. (9) Brief copilot. (10) Conduct preflight according to
current checklist.
NOTE: If the weather briefing void time cannot be extended by using the aircraft radio, it may be advisabe 10 perform the preflight procedures and crew briefing
before obtaining the weather briefing.

-
Appendix C
Sample Program of Instruction for Tactical Instrument Flight
Task .
Condition Type ~nstruction References Training/Evaluatioo Standards
Identify the prerequisite for conducting Classroom Conference AR 95-1 The student must demonstrate a knowtedge tactical instrument flight. FM 1-240 of instrument flight procedures, regulations.
TERPs and flight techniques.
Identify Ihe Threat ancl how it affects Classroom Conlerence FM 1-240 The student must demonstrate a knowledge tactícaJ instrument flight FM 1-402 of Threat weapons and 1tIeir capabilities.
FM 44-30 The sludent must also know the planning
requirements that will avoid Of minimize detection of the aircraft by Threat weapons systems.
klentUy the condition during which tactical Classroom Conference FM 1-240 The student musl demonstrate B knowledge
instrument flight win be conducted. of the meteorological conditions that require the use of tactical instrument flight.
Identify the principles of employment 101 Classroom Conference FM 1-240 The student must demonstrate a knowtedge instrumenl flight in the cormal zone. of the different flight altitudes that will be
Ilown within the diftBfent areas of the combat zone, NAVAIDs. classes of
approaches, and the control procedures to
be followed.
Identify the factors that must be considered Classroom Conference FM 1-240 The student must demonstrate a knowledQf when planning a tactical instrument flight. of the factors that are required for initial
planning of a tactical instrument flight. This inctudes the mission requirements (what,
where, when, and who), enemy situation, location of ADA weapons, weather condition, communications, NAVAIDs, and
. special equipment
Describe the two types of navigation used Classroom Conlerence FM 1-240 The student must demonstrate a knowledg.
for tactical navigation. of the capabilities and limitations for both
dead-reckoning and radio navigation as relales to tactical Instrument flight planning
Describe the procecklre for delermining the Classroom Conference FM 1-240 The student must demonstrate a knowteclg' enrouta course. of the capabilities of the radio beacon,
conversion of grid course 10 magnetic
course, and measurement of distances in
kilometers.
.
.
Classroom Conference FM 1-.240 The student must demonstrate a knowledg Oesa1D9 the procedures for construction of the enroute safety zone. of how to construct an enroute safety zone
for dead-reckoning navigat;on, radio navigation. or a combination of dead- reckoning and radio navigation.
Descrme the procedures tor determining the Classroom Conferençe FM 1-240 The student must demonstrate a knowled~ MEA. of how to analyze the area within.the
enroute safety zone to determine the highest obstruction. Atter identifying the highest obstacle, the student must determine the MEA for each leg of the route.
Descnbe the prOcedure tor intercepting the Classroom Conterençe FM 1-240 The student must demonstrate a knowled~
enroute course after takeoff. of how to intercept the enroute course wh, the takeoff heading i6 less than Of greater
than 900 from the enroute course.
Describe the procedure for determining the aassroom Conference FM 1-240 The student must demonstrate a knowled~
takeoff dimb zone. 01 how to construct the takeoff climb zone analyze the area within the lone tOf the highest obstruction, and determine when t tum to intercept the enroute course can b
made.
Describe the procedures for detennining the Claosroom Conference FM 1-.240 The student must demonstrate a knowted takeoff safety zone. of the dimensions and orientation of the
takeoff safety zone, how to analyze the al within the lakeoff safety zone to determin the highest obstruction. and how 10
determine the MEA for the tirs11eg of the route.
15 DECEMBER 1984 UPDATE oFM 1-240 2

Task Condi1ion Type Inslruc1ion Relerences Training/EvaluationStandards
Describe the procedures for determining Classroom Conference FM 1-240 The student must demonstrate a knowledge
required rate of climb on takeoff. 01 how to construct a takeoff obstruction chart and how to determine the required climb rate to clear obstacles within the takeoff climb 20ne.
Describe the procedures for performing a Classroom Conference FM 1-240 The student must demonstrate a knowledge
terminal approach. 01 entry into the approach pattern, descent to the minimum maneuver altitude, the descent to MOA, and when to execute missed approach.
Describe the procedures for performing a Classroom Conference FM 1-240 The student must demonstrate a knowledge straight-in approach. of how to fix the final fix inbound; descend
in the pattern, when necessary; descend to MDA; and when to execute a missed approach.
Describe the procedures for determining the Classroom Conference FM 1-240 The student must demonstrate a knowledge approach safety zone. of the dimensions and orientation of the
approach safety 20ne, how to analyze the area within the approach safety zone to determine the highest obstruction, and how to determine the MEA lor the final leg of the
route.
Describe the procedures for determining the Classroom Conference FM 1-240 The student must demonstrate a knowledge
MDA for the approach. of how tD determine the highest obstructiDn within the approach safety zone. Using this
information, determine the MDA.
Describe the holding procedure. Classroom Conference FM 1-240 The student must demonstrate a knowledge 01 how to enter the holding pattern, the time 01 the inbound leg, direction of turn; how to determine the minimum maneuver altitude lor holding, and size of the maneuver area.
i Describe the missed approach procedure. Classroom Conference FM 1-240 The student must demDnstrate a knDwledge of when to execute the missed approach,
the direction of turn, method 01 course interception, climb requirements, and size of the maneuver area.
Identify the cfltegories of emergency Classroom Conference FM '-240 The student must demonstrate a knowledge procedures and describe the recommended 01 emergency conditions that may result
actions. from acquisition of the aircraft by Threat weapons, loss of radio navigational aids, or aircraft deficiencies.
Perform tactical instrument takeoff. A tactical instrument Practicat FM 1-240 The student must demonstrate the proper takeoff will be exercise procedure tor an instrument takeoff, performed. Takeoff required rate of climb, course interception, heading will be less and climb to MEA. than or greater than 90 degrees from the enroute course.
Perform enroute tactical instrument Aircraft or SFTS will Practical FM 1-240 The student must demDnstrate the proper
I navigation. be flown over tactical exercise procedures for dead reckoning and radio
Instrument route at navigation, maintain required altitude,
MEA. identify intersection or beacon passage, and attain accurate estimates of enroute time (:t1 minute).
Perform tactical instrument approach A tactical instrument Practical FM 1-240 The student must demonstrate the proper (terminal). approach will be exercise procedure for entry into the approach
performed. pattern, descent tD minimum maneuver altitude within the approach salety zone, descent to minimum descent altitude, tracking, transition to VFR llight, and execution of missed approach.
Perform tactical instrument approach A tactical instrument Practical FM 1-240 The student must demonstrate the proper (straight.in). approach will be exercise procedure for identifying the finallix,
performed. descent to MDA, tracking transition to VFR flight, el(8cution of missed approach, and when necessary, entry into holding to descend to the minimum maneuver altitude prior to initiating approach.
226 15 DECEMBER 1984 UPDATE. FM 1-240

Tos!< Condition Type Instruction Aererences
Perform holding at the radio beacon or Tactical holding will Practical FM 1-240 intersection. be performed. exercise
Perform missed approach procedure. Missed approach Practical FM 1-240 procedure will be exercise performed following
tactical approach.
Perform simulated emergency procedure. Simulated emergency Practical FM 1-240 conditions will be exercise performed.
Training/Evaluaüon Standards
The student must demonstrate the proper procedUfe for entry into the holding pattern, wind correction, and descent to minimum maneuver altitude.
The student must demonstrate the proper procedure for entry into the missed approach. direction of tum, climb to MEA, and interception of the smouts course.
The student must demonstrate the proper emergency procedures to be perfOfmed when confronted with an air defense emergency, loss of radio navigalional aids, or aircraft deficiency.
15 DECEMBER 1984 UPDATE. FM 1-240 22

Appendix D ATC Shorthand Symbols
D-1. General The number of flight clearances which
must be delivered by ATC does not permit excessive repetitions of a
clearance. Also the speaking rate is too rapid for longhand copying of the
clearance. Occasionally ATC will issue a
clearance which differs from the original flight plan. In such cases, aviators should be particularly alert to receive and understand the clearance given.
Clarification should be requested if any doubt exists. As an aid in copying ATC
clearances, a series of symbols has been devised for use as clearance shorthand.
D-2. Common ATC shorthand symbols See figure D-1.
D-3. Clearances and translations Examples of clearances written in
shorthand symbols and thair translations are given below. .
a. Example: R 1234 CAF M RY HDG RV V18 SO 0700 DPC 120.4
, Translation: Army 12345 is cleared as
! filed, maintain runway heading for radar vector to Victor 18, Squawk 0700 just
i before departure, departure control I frequency-120.4. ! b. Example: C iLS AP OlR RY36 M
300L Translation: Army 12345, cleared ILS
approach to Cairns, to runway 36, maintain 3000 to outer compass locator,
over. c. Exampie: ILS OlR LDG RY36
360/10 WX 6 OVC 2R-F 20.38 Transiation: Army 12345, except ILS
approach to Cairns, landing runway 36, wind 360 degrees at one zero, weather 600 feet overcast, visibility 2 miles in
light rain and fog, altimeter 29.38, over. d. Example: R 2 SE HOUND HDG 270
RV ILS OlR Translation: Army 12345, radar contact
2 miles SE Hound intersection, fly i heading 270 for radar vector to ILS .
approach course at Cairns, over.
228 15 DECEMBER 1984 UPDATE. FM 1-240

Above
ABV Above (altitude-hundreds 01 feef)
...2Q.. Advise
ADV Mer (passing)
L Airway designation
V2.31 Airport
A All turns left
"\
Alternate instructions
( ) Almude 6.000
60 And
& Approach
AP Approach control
APC Army
R At
@ A TC advises
CA A TC clears
e A TC requests
CR Ass lix
FX Back course
Be Baaring
BR Before (passing, reaching)
.::::::..
Below
BLO Below (altitude-hundreds olleet)
5õ Center
CTR Cleared as filed
CAF
Climb to (altitude-hundreds 01 feet)
1'50 Contact
CT Contact approach
CAP Contact (Cairns) approach control
eT OZR APe Contact (Denver) center
cT DEN ATR Cleared to land
L Course
CRS Cross
X Cruise
~ Delay indefinite
DLI Depart
DP Departure control
DPe Descend to (anllude-hundreds 01 leel)
.J.30 Direct
DR Direction (bcund):
Eastbound
Ee Westbound
we Northbound
N6 Southbound
58 Inbound
18 Outbound
OB DME lix (mije)
@ Each
EA Enter control area
~ Estimated time 01 arrival
ETA Expect
EX
figure 0..1. Common ATC Shorthand Symbol.
15 DECEMBER 1984 UPDATE oFM 1-240
Expect lurther clearance EFC
Fan mBl'ker
FM Final
F"
Flight level
FL Flight planned route
FPR For further clearance
FFC For further headings
FF'H From
FR Heading
HDG Hold (direction)
H-E Holding pattern
C) If nol possible
OR ILS approach
IL5 Initial approach
I. Intersection
INT Join or intercept airway, jet route, track. or
course -
:;:;:- Left turn after takeoff
LT Locator outer marker
LOM Maintain (or magnetic)
M
Maintain VFR condilions on top
VFR Middle compass locator
ML. Middle marker
MM Nondirec1ional beacon approach
NDB On course
OC Outer marker
OM Out 01 (leave) control area
8
22E

Over (slation) Report over Track
OZR RO TR Outer compass locator Report passing Until
OL RP U
Precision radar approach Report reaching Until advised (by)
PAR RR
Procedure turn Reverse course VA
PT RC Until further advised
Radar vector Right turn after lakeoft
UFA
RV RT Via
Radial (045. radial) Runway (numerical designation) vIA
045R RYI8 Visual approach
Remain well to left side Squawk
VA
LS SQ Victor (airway number)
Remain well. to right side Standby VI+
R5 5ay VOR
Report crossing Straight~in approach
8
\;;:x 51.
VORTAC
Report departing Surveillance radar approach ø
RD ASR Weather
Report leaving Take oft (direction) WX RL ,"'N While in control area
Report on course Tawer b.
R-CRS TWR
Figure 0-1. Common ATC Shorthand Symbols-Continued
230 15 DECEMBER 1984 UPDATE' FM 1-240

Glossary of Acronyms and Abbreviations
AAF Army airfield
AD air defense
ADF automatic direction finder
ADIZ. Air Defense Identification Zone
AF audio frequency
AGL above ground level
AHO above highest obstacle
AM amplitude modulated
ANDS acceleration-northl deceleration-south
AR Army regulation
ARSR air route surveillance radar
ARTC air route traffic control
ARTCC air route traffic control center
ASDE airport surface detection equipment
ASR airport surveillance radar
ATC air traffic control
ATCRBS Air Traffic Control Radar Beacon System
ATIS automatic terminal information service
BFO beat frequency oscillator
BIT built-in test
CAME corps air management element
CEDI Communications-Electronics Operation Instructions .
CG center of gravity
FLOT forward line of own troops
CH compass heading
FM field manual; frequency modulated
chap chapter
FSS flight service station
D
deviation G gravity
DAME division air management element
G3 Assistant Chief of Staff, G3 (Operations and Plans)
DC drift correction GCA
ground-controlled approach DCA drift correction angle
GPH gallons per hour DH
decision height GS ground speed DME
distance measuring equipment HF high frequency DOD
Department of Defense HIRL high intensity runway lights DR
dead rackoning Hz hertz E
east
ECM electronic countermeasures
IAF initial approach fix
EFC expect further clearance
IF intermediate fix
EHF extremely high frequency
IFF identification, friend or foe (radar)
ETE estimated time enroute
IFR instrument flight rules
EW electronic warfare
ILS instrument landing system
FAA Federal Aviation Administration
1M
inner marker
FAF final approach fix
IMC instrument meteorological conditions
FARP
forward arming and refueling point
IVSI instantaneous vertical speed indicator
FAT
free air temperature
kHz kilohertz
fig figure
km kilometer(s)
FL flight level
LDA localizer-type directional aid
FLIP LF flight information pubiication Jow frequency
15 DECEMBER 1984 UPDATE oFM 1-240 2:

LlRL low intensity runway lights
LOC localizer radio course
LOS line of sight
LZ landing zone
MAA maximum authorized altitude
MAP missed approach point
MCA minimum crossing altitude
MDA minimum descent altitude
MEA minimum enroute altitude
MEF maximum elevation figure
METAR meteorological terminal aviation report
; MF medium frequency
MH magnetic heading
MHz megahertz
MIRL medium intensity runway lights
MLS microwave landing system
MM middle marker
MOCA minimum obstruction clearance altitude
MRA minimum reception altitude
MSL mean sea level
MTI moving target indicator
N
north
NAVAID navigational aid
NDB nondirectional radio beacon
232
NM nautical mile
TACAN tactical air navigation
NOE nap-of-the-earth
TAS true airspeed
NOTAM notice to airmen
TC true course
OM outer marker
TERPS terminal instrument procedures
PAR precision approach radar
TH true heading
para paragraph
UHF ultra high frequency
PIREP pi lot report
US United States
PMSV pilot-to-metro service
VASI visual approach slope indicator
POI program of instruction
VFR visual flight rules
PPC
performance planning card
VHF very high frequency
PT point of touchdown, procedure turn
VLF very low frequency
RDF radio direction finder
VMC visual meteorological conditions
REIL runway end identifier lights
Vne velocity never exceed
RMI radio magnetic indicator
VOR-VHF omnidirectional range
RPM revolutions per minute
VORTAC collocated VOR and TACAN navigational aid
RPS revolutions per second
W
west
RVR runway visual range
WV wind velocity
S
south
SDF simplified directional facility
SFTS synthetic flight training systems
SHF super high frequency
SID standard instrument departure
SM statute mile
STAR standard terminal arrival route
15 DECEMBER 1964 UPDATE. FM 1-240

Index
This indS)( is organized alphabeticaUy by topic and subtopic. Topics and subtopics are iden1ified by paragraph number and page numbers.
A pattern, 5-3, 59 Common errors, ~, 59
Absolute altitude, 2-29, 23
Accelerations and decelerations (rotary wing), 4-29, 57 Common errors, 4-29, 57
Accelerator error, 2-5, 10
ADF Beat frequency oscillator, 14-23, 128 Course interception, 14-1 0, 120;
14-20,127; 14-21, 128 Homing, 14-27, 129 Indicator (radio compass), 1~, 118 Loop operation, 14-23, 128 Maintaining a course, 14-16, 124; 14-18, 125 Nondirectional beacon approach
Charts, 18-10, 180 Clearance, 18-11, 182 Descent, 18-14, 184 Final, 18-15, 184 Holding, 18-12, 182; 18-13, 183 Missed approach, 18-15, 184 Procedure turn, 18-14, 184
Orientation, 14-5, 118; 14-14, 123 Position fixing, 14-9, 120 Receiver, 14-2,118; 1~, 118 Relative bearing, 14-13, 123; 14-17, ~24 Station passage, 14-7, 119; 14-15, 123 Time and distance to station, 14-12, 123; 14-22,128; 14-26, 129
Aeronautical charts. See Charts: aeronautical
Agonlc line, 2-5, 10
AIMS altimeter (counter-clrum- pointer), 2-26, 20
Aircraft categories, 16-4, 123
Air navigation, 8-1, 62
Air navigation charts. See Charts: aeronautical
Airport surveillance radar, 20-3, 197
Air route surveillance radar, 20-3, 197
Airspeed Calibrated, 2-33, 26 Computations, 11-13, 86 Constant, 3-7, 29 Indicated, 2-33, 26 Indicator, 9-5, 78 True, 2-33, 26
Airspeed Indicator, 2-31, 26 Construction, 2-31, 26 Operation. 2-32, 26
-.
Airspeed settings Fixed wing, 4-3, 40 Rotary wing, 4-15, 47
Air traffic control equipment. See Radar
Air traffic control procedures. See Radar
Air traffic shorthand symbols, D-2, 228
Airways, 13-12,99
Alternate airport, 17-9, 160
Alternate source Static pressure, 2-23, 19 Vacuum, 2-10, 12
Altimeter, pressure, 2-24, 19 Construction, 2-25, 20 Effects of nonstandard temperatures and pressures, 2-27, 21 Errors, 2-27, 21 indications, 2-26, 20 Setting, 2-28, 22; 9-7, 78
Altimeter, radar, 2-30, 25
Altitude computations (CPU-26A/P), 11-15,86
Altitudes Absolute, 2-29, 23 Constant, 3-8, 29 Density, 2-29, 23 Indicated, 2-29, 23 Pressure, 2-29, 23 True, 2-29, 23
Ambiguity (loop), 14-24, 128
Angles, &-6, 63
Apparent precession, 2-8, 12
Approach, See ADF, ILS, VOR, and Radar
Approach charts, 17-1, 159 Circling minimums, 17-11, 161
Concentric rings, 17-3, 159 Legend pages, 17-2, 159
Format, 17-4, 159 Margin identification, 17-5, 159 Minimums section, 17-8, 160 Mission approach, 17-12, 161 Plan views, 17-6, 159 Procedural component operation, 17-13,161 Profile views, 17-7, 160 Runway visual range minimums, 17-14,161
Atmospheric iIIuston, 1-8, 7
Attenuation, 12-10,99
Attitude indicator Banking attitude, 3-19, 37 Electric, 2-13, 13
Caging, 2-15, 15 Construction, 2-14, 15
Errors, 2-15, 15 Operation, 2-12, 13 Positioning, 2-14, 15
Electric (Lear Mode14005G), 2-13,13 Navigation (10-882), 2-13, 13
15 DECEMBER 1984 UPDATE. FM 1-240
Pitch attitude, 3-12, 32 Power sources, 2-13, 13
Attitude instrument flying Definition, 3-2, 27 Power, pitch, and bank control, 3-2, 27; 3-12, 32; 3-19, 37
Aural null, 14-1, 118; 14-25, 129
Autorotations, 4-28, 57 Common errors, 4-28, 57
Average ground speed, 1!Hì, 80
Azimuth. See Measurement: direction
Autokinesis, 1-3, 5
B pattern, 5-4, 61 Common errors, 5-4, 61
Back course, 19-9, 192
Ball, 2-18, 21
Bank control Common errors, 3-24, 39 To produce balanced straight flight, 3-19, 37 Trim, 3-23, 39
Bank Indicating Instruments Attrtude indicator, 3-20, 37 Heading indicator, 3-21, 37 Turn-and-slip indicator, 3-22, 37
Barometric scale, 2-26, 20
Beacons, marker, 19-5, 189
Beacon passage ADF, 14-7, 119; 14-15, 123 ILS, 19-5, 189 Loop, 14-27, 129 Radio magnetic indicator, 13-11, 108 VOR, 13-11, 108
Beat frequency oscillator, 14-23, 128
Calibrated airspeed, 2-33, 26
Cardinal points, 8-13, 65
Charts Aeronautical
Photomaps, 7-12, 75 Sectional, 7-10, 74 Tactical, 7-13, 75 World Aeronautical, 7-11, 75
Air navigation, 7-1, 68 Approach, 17-1, 159 Characteristics, 7-4, 68 Conformality, 7-7, 71
Distortion, 7-3, 68 Graticule, 7-5, 70 Grid system, 6-6, 63 Lambert, 7-7, 71
Mercator, 7-8, 72 Polar stereographic, 7-9, 74 Projects. See Projection Scales, 7-2, 68 Standard parallels, 7-7, 71
Checkpoints. See Intersections
Circles Arcs, 6-6, 63 Center angle, 6-6, 63 Diameter, 6-2, 62 Great, 6-7, 64; 6-18, 68
23~

Radius, 6-7, 64 Reference
Equator, 6-9, 65
Latitude, 6-12, 65 Longitude, 6-12, 65 Meridians, 6-11, 65
Parallels, 6-8,65; 6-10, 65 Poles, 6-8, 65
Small, 6-7, 64
Circling approach, 16-2, 143
Clearance Expected approach, 18-7, 179
Final approach, 1 B-7, 179 Holding, 16-23, 155; 16-25, 157
Missed approach, 17-12, 161
Shorthand, D-2, 22B Straight-in, 16-6, 145 Transition/feeder, 16--8, 147
Climbing turns Fixed wing, 4-10, 44
Common errors, 4-10, 44
Rotary wing, 4-25, 55
Common errors, 4-25, 55
Climbs, straight, See straight climbs (fixed and rotary wing)
Clock, 9-8, 78
Coarse azimuth pattern (TACAN),
15-3, 130
,
Co-channel interference (TACAN),
16-5, 132
Codes (transponder), 20-16, 201
Compass Errors, 2-5, 10
Magnetic, 2-20, 16
Transmitter, 2-20, 16 Radio, 13-6, 103
Compass turns Fixed wing, 4-11, 45
Common errors, 4-11, 45 Rotary wing, 4-11, 45
Common errors, 4-11, 45
Compensator assembly, 2-4, 10
Cone of confusion (azimuth), 15-5, 132
Constant airspeed, 3-7, 29
Control Airspeed, constant, 3-7, 29 Altitude, constant, 3-8, 29 Attitude, 3-9, 31
Bank, 3-19, 37 Pitch, 3-12, 32 Power, 3-5, 27
Coordinates, 6-6, 63
Corlolls illusion, 1-3, 5
Course Magnetic, B-4, 75 Measuring, 6-14, 65 Plotting, 8-4, 75
Course Indicator (VOR)
Components, 13-5, 101
Course selector Description, 13-5, 101
Selecting a course, 13-9,1D4
234
Using the course reciprocal, 13-11, 10B
Deviation indicator (needle)
Centered, 13-5, 101
Deflected, 13-5, 101
Description, 13-5, 101 Sensitivity, 13-5, 101
Giide slope indicator, 13--5, 101
TO-FROM indicator, 13--5, 101
Warning flags, 13-5, 101
Course selector (VOR), 13-5, 101
CPU-26A/P dead-reckoning computer (grid side) Correcting the reported wind, 11-27, 93 Description, 11-19, BB
Heading and airspeed computations, 11-25,91 Heading and ground speed computations, 11-24, 91
Sliding grid, 11-20, BB
Wind triangle, 11-21,89; 11-22, 90;
11-2B,94 Wind velocity computations, 11-23, 90;
11-26,92
CPU-26A/P dead-reckoning computer (slide rule face) Airspeed computation, 11-13, 86 Altitude computations, 11-15, B6
Density aititude computation,
11-14, B6
Description, 11-1, B2
Distance, 11-B, B4
Distance conversion, 11-3, B3
Drift correction, 11-17, 87 Fuel consumption calculations, 11-10, 85; 11-11, B5 Ground speed computation, 11-6, B4
Indexes, 11-2,82; 11-9, B5
Oft-course correction, 11-16, B6
Proportion, 11-4, B4 Radius of action (fixed base), 11-1B,87 Ratio. See Proportion Rule of 60, 11-16, B6
Scales, 11-20, BB
Time-distance computation, 11-5, 84;
11-9, B5
Time requirement, 11-7,84
Crab angle, 1 ~3, 80
Cross-checking Bank instruments, 3-24, 39 Pitch attitude instruments, 3-1 B, 36 Power instruments, 3-11,31
Crosswind, 10-2,78; 10-6,80
Current, electrical, 12-3, 95
Cycle, 12-2, 95
Dead reckoning Computers, See CPU-26A1P dead- reckoning computer
Instruments, 9-1, 77
Decelerations (rotary wing), 4-29, 57
Degrees (angular), 6-7, 64
Demonstrations of spatial
disorientation, 1-4, 5
15 DECEMBER 1984 UPDATE' FM 1-240
Density altitude, 2-29, 23
Descending turns Fixed wing, 4-10, 44
Common errors, 4-10, 44
Rotary wing, 4-26, 57 Common errors, 4-26, 57
Descents, straight (fixed wing), 4-5, 40
Deviation, 2-5, 10
Deviation card, 2-5, 10
Deviation errors, magnetic compass, 9-2,77
Dip angle, 2-3, 9
Direction finding steers, radar, 20-15, 201
Directional gyro. See heading indicator
Distance conversion computation (CPU-26A/P), 11-1, 82
Distance measuring equipment, TACAN, 15-4, 132
Distance measurement. See Measurement: distance
Distortion, 7-3, 68
Dividers, 8-3, 75
Double.the.angle course interception, 13-13,112
Drift corrections. See Wind: drift correction Application, 10-3, 80 Computation, CPU-26A/P, 11-16, 86;
11-17,87 Course, 10-3, 80; 10-4, 80 During tracking
ADF, 14--6, 119; 14-9, 120
VOR, 13-10, 104 Heading, 9-2, 77 Holding, 16-24, 156 Procedure turn, 16-15, 149
Earth Direction measuring, 6-14, 65 Distance, 6-17, 6B; 6-18, 68 Inclination, 6-5, 62 Measurement. See Measurement: direction and distance Position designation, 6-6, 63 Revolution, 6-4, 62 Rotation, 6-3, 62 Shape, 6-2, 62
Electric attitude Indicator (Lear Model 4005G), 2-13, 13
Electric heading Indicator ID-5671 ASN, 2-20, 16
Electrically driven gyros, 2-9, 12
Elevator illusion, 1-3, 5
Equator, 6-9, 65; 6-10, 65
Erroneous navigational signal, TACAN,
15-5, 132
Errors Acceieration, 2-5, 10

Bank control, 3-24, 39 Magnetic compass, 2-5, 10 Pitch attitude control, 3-18, 36
Establi shing interseçtions, TACAN, 15-10, 136
Expect approach clearance, 18-4, 177
FAA weather advisories, 20-20, 202
False horizon iHusion, 1-3, 5
Featureless terrain illusion, 1-6, 7
Feeder routes, 16-5, 144; 16-8, 147;
16-9, 147
Final approach. See ADF, VOR, and ILS approaches
Final approach segment, 16-5, 144
Fine azimuth pattern, TACAN, 15-3, 130
Fixes. See Position fixing ADF, 14-9, 120 Approach, 15-15, 149 VOR, 13-12, 110
Flicker vertigo inusion, 1-3, 5
Flight clearance. See Clearance: flight
Flight Instruments and systems, 2-1, 9
Flight log, ~, 223
Free air temperature gauge, 9-6, 78
Frequency Classification, 12-2,95; 12-7,98 TACAN, 15-2, 130
Front course, 19-7, 192
Fuel consumption (CPU-26A/P), 11-11, 85; 11-12,85
Fuel cons...mptlon planning, B-3, 223
GCA. See Ground-controlled approach
Geographic North Pole, 6-3, 62
Glide slope, ILS, 19-4, 187
Great circle, 6-7, 64; 6-18, 68
Greenwich meridian, 6-11, 65
Grid system (charts), 6-6, 63
Graveyard spin illusion, 1-3, 5
Graveyard spiral Illusion, 1-3, 5
Ground-controlled approach. See Radar: air traffic controi procedures: approach control (GCA) Airport surveillance radar, 20-1, 196; 20-6,198; 20-12, 199 Precision approach radar, 20-1, 196;
20-6, 198; 20-12, 199
Ground lighting illusion, 1-6, 9
Ground speed, 10-6, 80
Ground weather radar, 20-18, 202
Gyros Definition, 2-6, 10 Electrically driven, 2-11, 12 Heading indicator, 2-20, 16 Instrument power source, 2-9, 12
Mode of operation, 2-1 9, 16 Mountings, 2-7, 12 Vacuum driven, 2-10, 12
Gyroscopic properties Precession, 2-8, 12 Rigidity in space, 2-8, 12
Heading Compass, 2-4, 10 Drift and ground speed, 10-2, 78 Magnetic, 2-4, 10; 10-2,78 Track and ground speed, 10-2,78 True, 9-2, 77
Heading and airspeed computations (CPU-26A1P), 11-13, 86
Heading and ground speed computations, 11-24, 91
Heading Indicator Banking or turning, 2-20, 16 Course indicator 10-883, 2-20, 16 Electric 1D-567/ ASN, 2-20, 16 Magnetic compass. See Magnetic compass Radio magnetic
1D-250/ARN, 2-20, 16 1D-998/ ASN, 2-20, 16
Headwind, 10-2,78 High frequency propagation, 12-12,99
Holding ADF
Aiffipeeds, 15-20, 153 Clearances and reports, 16-25, 157 Drift correction, 16-24, 156 Entry, 15-22, 154 Stacking, 15-26, 158
VOR Airspeeds, 16-20, 153 Clearances and reports, 15-25, 157 Drift correction, 16-24, 156 Entry, 15-22, 154 Stacking, 15-26, 158
Homing ADF, 14-27, 129 Loop, 14-27, 129
IFR flight planning Aircraft equipmenL B-3, 223 Altitude selection, B-3, 223 Checklist, B-3, 223 Departure, B-3, 223 Estimated time enroute, B-3, 223 Flight log, B-3, 223 Flight plan, B-3, 223 FLIP research, B-3, 223 Ground speed, B-3, 223 Performance planning card, B-3, 223 Planning, B-2, 223 Route selection, B-3, 223 Route survey, B-3, 223 Sample plan, 8-4, 223 Terminal area, B-3, 223 Weather sources, B-3, 223
illusions in ffight, 1-1, 5
Illusions leading to spatial disorientation, 1-3, 5
Illusions Autokinesis, 1-3, 5
15 DECEMBER 1984 UPDATE. FM 1-240
Coriolis, 1-3, 5
Elevator, 1-3, 5
False horizon, 1-3, 5
Flicker vertigo, 1-3, 5 Graveyard spin, 1-3, 5 Graveyard spiral, 1-3,5 Inveffiion, 1-3, 5 Landing error, 1-6, 7
Leans, 1-3, 5
Somatgravic, 1-3, 5
ILS. See Instrument landing system
Impact pressure, 2-22, 19
Inclination, 6-5, 62
Indicated airspeed, 2-33, 26
Indicated altitude, 2-29, 23
Indicator Aiffipeed, 2-31, 26 Altimeter, 2-24, 19 Attitude, 2-12, 13
Course, indicator, 10-883, 2-20, 16 Heading, 2-20, 16 Navigation attitude, 10-882, 2-14, 15 Slaved gyro magnetic. See Slaved gyro magnetic heading indicators Turn-and-slip, 2-16, 16 Vertical speed, 2-34, 26
Initial approach segmen1, 16-5, 144
Instantaneous vertical speed Indicator, 2-38, 27; 3-15, 35
Instrument approach procedures. See Approach: Instrument and ILS Briefing, 15-27, 158 Holding, 16-17, 153 Identification, 16-2, 143 Missed approach, 15-6, 145
Procedures, 15-5, 144 Procedure turns, 15-7, 146; 15-11,147 Straight-in, 16-6, 145 Transitionslfeeders, 15-5, 144;
16-8, 147
Instrument flylng- See Attitude Instrument flying
Instruments indicating pitch attttude Attitude indicator, 3-20, 37 Heading indicator, 3-21, 37 Turn-and-slip indicator, 3-22, 37
Ball, 3-22, 37 Turn needle, 3-22, 37
Instruments Indicating pitch attitude Airspeed indicator, 3-16, 36 Altimeter, 3-14, 34 Attitude indicator, 3-13, 33 Vertical speed indicator, 3-15, 35
Instrument landing system Approach procedures
Arrival, 19-8, 190 Charts, 17-1, 159 Compass locator, 19-2, 185 Front COUffie, 19-7, 192 Glide slope, 19-4, 187 LDA, 19-12, 194 Localizer, 19-3, 185 Localizer back course, 19-9, 192 Localizer only, 19-8, 192
23,

Marker beacons, 19-5, 189
Missed approach, 19-7, 192
Procedure turn, 19-7, 192
Runway visual range, 19-10, 192
SDF, 19-12, 194
Ground components, 19-2, 185
Visual approach slope indicator,
19-11,194
Instrument takeoll Fixed wing, 4-3, 40
Common errors, 4-3, 40 Rotary wing, 4-15, 47
Common errors, 4-15, 47
Intercardinal points, 6-13, 65
Interception, course ADF, 14-20, 127; 14-21, 128
Double-the-angle, 13-13, 112 Loop, 14-25, 129
VOR, 13-13, 123
Interception of TACAN arcs, 15-11, ! 136 I , Immediate approach segment, 16-5,
144
Intersections, 15-10, 136
Inversion illusion, 1-3, 5; 13-12, 110
, Isogonic lines, 2-5, 10
; Kilometer, 6-17, 68 I
i Kollsman window, 2-26, 20
Lag, vertical speed Indicator, 2-36, 26
Lambert conformal projection, 7-7, 71
Landing error illusion, 1-6, 7
Atmospheric illusion, 1-6, 7
Featureless terrain illusion, 1-5, 7
Ground lighting illusion, 1-6, 7
Preventiùn of, 1-7, 9
Runway and terrain siope illusion,
1-6,7 Runway width illusion, 1-6, 7
Latitude, 6-8, 65
Leans illusion, 1-3, 5
Level turns Fixed wing, 4-6, 41
Common errors, 4-6, 41
Rotary wing, 4-20, 52 Common errors, 4-20, 52
Light system (ILS), 19-2, 185
Line-of-sight transmission, 12-13,99
Lines Agonic, 2-5, 10 Isogonic, 2-5, 10
Localizer, ILS Back course, 19-9, 192 Blue sector, 19-3, 185 Front course, 19-7, 192; 19-6, 192
Needie deflection, 19-3, 185 Receiver, 19-3, 185 Tracking, 19-3, 185
Yellow sector, 15-5, 132
Lock-on, TACAN, 15-5, 132
Loop, ADF Ambiguity, 14-24, 128
236
Beacon passage, 14-27, 129 Homing, 14-24, 128 Null, 14-25, 129
Orientation, 14-24, 128
Time and distance, 14-26, 129 Tracking, 14-25, 129
Low frequency, See LF/MF propagation
Loxodromic curve, 6-16, 66
Lubber line, 2-4, 10 .
Magnetism, 2-2, 9
Compass, 2-4, 10
Compensator assembly, 2-4, 10
Construction, 2-4, 10
Errors, 9-2, 77 Deviation, 9-2, 77 Magnetic dip, 2-5, 10
Acceleration, 2-5, 10 Magnetic field, 2-2, 9
Northerly turning, 2-5, 10
Constructon compensation, 2-4, 10; 2-5, 10
Oscillation, 2-5, 10 Variation, 2-5, 10; 9-2, 77 Float assembly, 2-4, 10
Lubber line, 2-4, 10 Swinging, 2-4, 10
Course, 9-2, 77 Deviation, 2-5, 10; 9-2, 77 Direction, 9-1, 77 Fields, 2-2, 9
Heading, 10-2, 78 Indicator, radio. See Radio magnetic
indicator Lines of force, 2-2, 9
North Pole, 2-2, 9
Poles, location, 2-3, 9
Variation, 2-5, 10
Manual loop procedures, 14-23, 128
Map. See Charts
Measurements. See PLU-2/C plotter Direction
Altitudes, 16-3, 143 Bearing, 16-3, 143 Bearing (relative), 14-13, 123 Cardinal points, 6-13, 65 Compass rose, 6-14, 65 Course, 16-3, 143 Degree, 8-4, 75 Distances, 16-3, 143 Radial, 16-3, 143
Track, 10-2, 78 Distance
Angular, 6-7, 64 Arcs, 6-7, 64 Degrees, 6-7, 64 Dividers, 8-3, 75 Great circle, 6-7, 64 Linear 6-7, 64 Radius, 6-7, 64 Scale, 7-2, 68 Statute and nautical miles, 6-17, 68 Tactical air navigation, 15-4, 132 Units, 6-17, 68 Position (geographical), 6-6, 63
Measuring, 6-17, 68
Mercator chart, 7-8, 72
15 DECEMBER 1984 UPDATE. FM 1-240
Meridians Greenwich (prime), 6-11, 65; 6-12, 65 Longitude, 6-11, 65; 6-12, 65
Middle marker, 19-5, 189
Miles Nautical, 6-17, 68 Statute, 6-17, 68
Minimum authorized altitude, 16-9, 147
Minimum enroute altitude, 20-10, 198
Minimum obstruction clearance altitude, 20-10, 198
Missed approach, 16-16, 151
Missed approach segment, 16-5, 144
Modulation Amplitude, 16-5, 144 Frequency, 12-5, 96
Monitor, nonradar, 20-13, 199
Nautical mile, 6-17, 68
Needle (VOR). See VOR: Course Indicator
Nonstandard atmospheric pressure, 2-27, 21
Nonstandard temperature, 2-27, 21
Northerly turning error, 2-5, 10
NOTAM, B-3, 223
Null, 14-1, 118; 14-25, 129
Oil-course correction (drift) (CPU-26A/P), 11-16, 86
Omnidirectional range. See VOR
Orientation ADF, 14-5, 118 FM homing, 14-23, 128 Loop, 14-23, 128
VOR, 13-9, 104
Oscillation error, 2-5, 10
Outer marker, 19-5, 189
Parallels, 6-8, 65; 6-10, 65
Pattern A, 5-3, 59
Pattern B, 5-4, 61
Photomaps, 7-12, 75
Phraseology, radio 20-17, 201
Pitch Attitude, 3-2, 27 Common errors, 3-18, 36 Control, 3-12, 32 Cross-checking of instruments, 3-3, 27; 3-18,36 Trim, 3-4, 27
Pitch Indicating instruments Airspeed indicator, 3-16, 36 Altimeter, 3-14, 34 Attitude indicator, 3-13, 33
Vertical speed indicator, 3-15, 35
Pltot-static system, 2-21, 18 Impact pressure, 2-22, 19
Static pressure, 2-23, 19

Pitottube, 2-22, 19
Plotter. See PLU-2/C plotter
Plotting (position), 8-1, 75
PLU-2/C plotter, 8-4, 75
Polar stereographlc proJection, 7-9, 74
Position fixing
ADF, 14-9, 120 VOR, 13-12, 110
Position reports, 16-25, 157
Power Airspeed settings, rotary wing, 3-9, 31 Changes, 3-10, 31
Control, 3-5, 27 Defin~ion, 3-1, 27 Instruments, 3--6, 27
Precision approach radar, 20-12, 199
Pressure altitude, 2-29, 23
Pressure altimeter, 2-25, 20
Procedure turns Adjustment for wind, 16-15, 149 Area, 16-13, 149 Minimum altitude, 16-14, 149 Teardrop, 16-12, 148 Turning rate, 16-15, 149
Proficiency maneuvers (fixed wing) Pattern A, 5-3, 59
Common errors, 5-3, 59 Pattern B, 5-4, 61
Common errors, 5-4, 61 Vertical S and 8-1, 5-2, 59
Corrmon errors, 5-2, 59
Projection Lambert, 7-7, 71
Merætor, 7~, 72 Modified polar stereographic, 7-9,74 Polar stereographic, 7-9, 74
Radar Airport surveillance, 20-6, 197 Air route surveillance, 20-5, 197 Air traflic control procedures:
Approaches (ASR and PAR), 20-1, 196; 2~, 198; 20-12,199 Arrival control, 20-11, 199;
20-13, 199 Departure control, 20-11, 199; 20-12, 199 Enroute control, 20-10, 198 Expanded service, 20-14, 201; 20-19, 202 Handoff, 20-9, 196 Limitations, 20-7, 197 Monitor service, 20-13, 199
Prmary, 20-3, 197
Secondary, 20-4, 197 Transfer of control, 20-9, 198 Transitions/feeder, 20-11,199; 20-13, 199 Weather advisories, 20-20, 202 Within ADIZ, 20-15, 201
Radar altimeter, 2-30, 25 Phraseology
Transponder, 20-17, 201 Vectors, 20-19,202 Weather: ground, 20-18, 202
Radial, 13-9, 104
Radiated test signal, VOT, 13-16, 115
Radio Cycle, 12-2, 95 Frequencies, 12-2, 95; 12-7, 98 Frequency modulation, 12-5, 96 Principles, 12-1, 94 Receivers
Signal propagation, 12-ð, 98 Transmitters, 12-5, 96 Wavelengths, 12-2, 95 Waves, 12-2, 95
Radio compass indicator, ADF, 14-5, 118
Radio magnetic indicator, 13--6, 103
Radius, 6-7, 64
Radius of action (CPU-26A1P), 11-18, 87
Ratio and proportion (CPU-26A1P), 11-14,86
Real precession, 2~, 12
Recoveries from unusual attitudes Fixed wing, 4-12, 45
Common errors, 4-12, 45 Rotary wing, 4-27, 57
Common errors, 4-27, 57
Reference circles. See Circles: references
Relative bearing Course interception, 14-20, 127; 14-21,128 Homing, 14-25, 129 Maintaining a course, 14-16, 124 Orientation, 14-4, 118 Position fixing, 14-19, 126 Station passage, 14-15, 123 Time and distance, 14-22, 128
Rhumb line, 6-16, 66
RMI. See Radio magnetic indicator
Rose, compass, 6-14, 65
Rotation, 6-3, 62
Runway and terrain slope illusion, 1"'{;, 7
Runway visual range, 19-10, 192
Runway width illusion, 1-6, 7
Sand 5-1 maneuvers. See Proficiency maneuvers (fixed wing)
Scales Chart, 7-2, 68
CPU-26A/P computer, 8-4, 75
Sectional charts, 7-10, 74
Sensory system, 1-2, 5
Signal patterns Glide slope, ILS, 19-4, 187 Loælizer, ILS, 19-3, 185 Marker beacon, 19-5, 189 VOR, 13-3, 100
Skip distance, 12-9, 99
Skip zone, 12-9, 99
15 DECEMBER 1984 UPDATE. FM 1-240
Slaved gyro compass system Operation, 2-19, 16; 9-4, 78 Components, 2-20, 16
Slaved gyro magnetic heading Indicators Course indicator, ID-883, 2-20, 16 Electric, 1D-567/ ASN, 2-20, 16 Radio magnetic, 1D-250/ ARN, 2-20,16 Radio magnetic, ID-998/ ASN, 2-20, 16
Somatogravic illusion, 1-3, 5
Spatial disorientation, 4-12, 45 Climbing while accelerating, 1-4, 5 Climbing while turning, 1-4, 5 Diving while turning, 1-4, 5 Tilting to right or left, 1-4, 5 Reversing of motion, 1-4, 5 Diving or rolling beyond the vertical plane, 1-4, 5
Standard instrument departures, B-3, 223
Standard terminal arrival routes, 16~, 147; 16-9, 147; 16-10, 147
Static pressure, 2-23, 19; 2-26, 20
Static, radio, 13-2, 99
Station passage, VOR 13-11, 108
Statute mile, 6-17, 68
Steep turns Fixed wing, 4-8, 42
Common errors, 4-8, 42 Rotary wing, 4-23, 54
Common errors, 4-23, 54
Straight-and-Ievel flight Fixed wing, 4-4, 40
Common errors, 4-4, 40 Rotary wing, 4-17, 49
Common errors, 4-17, 49
Straight climbs and descents (fixed wing), 4-5, 40 Common errors, 4-5, 40
Straight climbs (rotary wing), 4-16, 47 Common errors, 4-16, 47
Straight descents (rotary wing), 4-18, 51 Common errors, 4-18, 51
Straight-In Approach, 16-2, 143; 16-6, 145 Minimums, 17-10, 161
Surveillance radar, 20-5, 197
TACAN, 15-1, 130
Tactical Instrument flight Aids, navigational, 21-8, 205 Altitudes, 21-5, 204 Approaches, 21-6, 205 Communications, 21-4, 203 Course line, determining the, 21-9, 206 Defini1ion, 21-2, 203 Employment, principles of, 21-4, 203
Flight clearance, 21-4, 203 Flight-following, 21-4, 203 Threat avoidance, 21-4, 203
237

Flight routes selection, 21-6, 205 Navigation, radio and dead reckoning,
21-10,207 Planning
Preflight, 21-7, 206; 21-8, 206
Takeoff, 21-11, 211
Prerequisites, 21-2, 203
Procedures Approach, 21-12, 214
Missed, 21-14, 219 Straight-in, 21-12, 214 Terminal, 21-12, 214
Emergency, 21-15, 219 Aircraft deficiency, 21-15, 219 Air defense, 21-15, 219 Radio navigational aids, loss of,
21-15,219 Holding, 21-13, 218 Threat, 21-1, 203; 21-4, 203 Training, 21-3, 203; 21-16, 221;
G-1,225
Tailwind, 10-2, 78
Takeoff, instrument Fixed wing, 4-3, 40 Rotary wing, 4-15, 47
Teardrop turns, 16-12, 148
Terrain and runway slope illusion, 1-6, 7
Time-distance compulations (CPU-26A/P), 11-4, 84
Time-distance to beacon ADF, 14-12, 122; 14-26, 129 VOR, 13-14, 114
Time turns Fixed wing, 4-9, 43
Common errors, 4-9, 43 Rotary "'ing, 4-24, 54
Common errors, 4-24, 54
TO-FROM indicator (VOR), 13-5, 101
Tracking ADF, 14-5, 118 ILS localizer, 19-3, 185 Loop, 14-23, 128 VOR, 13-10, 104
Track interception, See Interception, track
Traffic control centers, air route, 20-5, 197
Transmlssometer, 19-2, 185
Transmitter ADF, 14-3, 118 ILS glide slope, 19-4, 187 ILS iocalizer, 19-3, 185
VOR, 13-3, 100
Transponder, use of, 20-16, 201
Trim, 3-4, 27 Bank attitude, 3-23, 39 Pitch attitude, 3-17, 36
True airspeed, 2-33, 26; 9-5, 78
True altitude, 2-29, 23
Turn-and-sllp indicator, 2-16, 16
238
Ball, 2-18,16; 3-22, 37
Turn needle, 2-17, 16; 3-22, 37
Turn coordinator, 3-22, 37
Turns Banking. See Bank control Climbing (rotary wing), 4-16, 47
Common errors, 4-16, 47 Climbing and descending (fixed wing),
4-10, 44 Common errors, 4-10, 44
Compass Fixed wing, 4-11, 45
Common errors, 4-11, 45
Rotary wing, 4-22, 54 Common errors, 4-11,45
Descending (rotary wing), 4-26, 57
Common errors, 4-26, 57
Level Fixed wing, 4--6, 41
Common errors, 4-6, 41
Rotary wing, 4-20, 52 Common errors, 4-20, 52
Procedure. See Procedure turns Steep
Fixed wing, 4-8, 42 Common errors, 4-8, 42
Rotary wing, 4-23, 54 Common errors, 4-23, 54
Timed Fixed wing, 4-9, 43
Common erors, 4-9, 45
Rolary wing, 4-24, 54 Common errors, 4-24, 54
To headings (gyro) Fixed wlng,.4-7, 42
Common errors, 4-7, 42 Rotary wing, 4-21, 54
Common errors, 4-21, 54
True airspeed, 2-33, 26
Unusual attitudes and recoveries . Fixed wing, 4-12, 45
Common errors, 4-12, 45 Rotary wing, 4-27, 57
Common errors, 4-27, 57
Variation, magnetic, 2-5, 10; 9-2, 77
Vectors Radar, 20-4, 197
Wind, 11-21, 89
Velocities, triangle, 11-21, 89
Velocity, wind, See Wind: direction and speed
Vertical Sand 8-1, 5-2, 59
Common errors, 5-2, 59
Vertical speed indicator . Adjustment, 2-37, 27 Construction, 2-34, 26 IVSI, 2-38, 27 Lag, 2-36, 26 Operation, 2-35, 26
VHF omnidirectional range, See VOR
Victor airways, 13-12, 110
Voice communications, See Radio: communications
Voice procedures. See Radio: communications
15 DECEMBER 1984 UPDATE. FM 1-240
VOR (VHF omnidirectional range) Approach, 18-7, 179
Charts, 18--2, 176 Clearance, 18-4, 177 Descent, 18--6, 179 Holding, 18-5, 177 Landing, 18--8, 180 Missed approach, 18--9, 180
Procedure turn, 18-7, 179
Receiver, 13-4, 100 Transmitter, 13-3, 100
Warning flags Course indicator, VOR, 13-5, 101
Glide slope, 13-5, 101
Wavelength, 12-2,95
Wave, radio, 12-2,95; 12-4,95
Wave, transmission, 12-2, 95
Weather Flight planning, B-2, 233 Radar, ground, 20-18, 202
Wind Crosswind, 10-2, 78; 1 0-6, 80 Direction and speed, 10-2, 78 Downwind, 10-2, 78 Drift, 1 0-2, 78 Drift correction. See Drift correction
Headwind, 10-6, 80; 1 0-2, 78 Tailwind, 10-6, 80; 10-2,78 Triangle, 11-21, 89; 11-22, 90;
11-28,94 Upwind, 10-4, 80'
Vectors, 11-23, 90 Velocity computation, 11-26, 92
World aeronautical chart, 7-11, 75
., IJ .5. GOVERNME.NT PRINTING OFFICE: 1984- 461-027:20044